
多回転位置センサ付軸受及び回転装置
【課題】組み立てコストを抑えながらコンパクトな多回転位置センサ付軸受及び回転装置を提供する。
【解決手段】回転軌道輪、固定軌道輪、転動体及び保持器からなる転がり軸受部と、前記保持器に固着され磁気的特性が周方向に変化する保持器側の被検出部と、この保持器側の被検出部に対向した1相のアナログ出力の磁気的センサからなる第1の磁気的検出部と、回転軌道輪に固着され磁気的特性が周方向に変化する軌道輪側の被検出部と、この軌道輪側の被検出部に対向した2相のアナログ出力の磁気的センサからなる第2の磁気的検出部を備えた多回転位置センサ付軸受であって、前記軸受の回転軌道輪の所定数以下の整数の回転数において、前記回転軌道輪に対応して回転する保持器の回転数が整数又は整数の近傍値のいずれでもないことを特徴とする多回転位置センサ付軸受。
【解決手段】回転軌道輪、固定軌道輪、転動体及び保持器からなる転がり軸受部と、前記保持器に固着され磁気的特性が周方向に変化する保持器側の被検出部と、この保持器側の被検出部に対向した1相のアナログ出力の磁気的センサからなる第1の磁気的検出部と、回転軌道輪に固着され磁気的特性が周方向に変化する軌道輪側の被検出部と、この軌道輪側の被検出部に対向した2相のアナログ出力の磁気的センサからなる第2の磁気的検出部を備えた多回転位置センサ付軸受であって、前記軸受の回転軌道輪の所定数以下の整数の回転数において、前記回転軌道輪に対応して回転する保持器の回転数が整数又は整数の近傍値のいずれでもないことを特徴とする多回転位置センサ付軸受。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、多回転の絶対位置信号を生成する回転位置センサを備える軸受及び回転装置に関し、特に自動車のステアリングホイールの絶対操舵位置を検出するのに好適な多回転位置センサ付軸受及び回転装置に関する。
【背景技術】
【0002】
従来より、モータとロータリーエンコーダからなる回転制御装置のコンパクト化と低コスト化を目的として、モータ内の軸受にエンコーダの機能を付した回転センサ付軸受が各種提案されている。これにはレゾルバなどのような回転位置を検出可能なタイプの回転センサを付した軸受もあるが、360°を超える多回転の回転位置情報を得られるものではない。近年、ステアリングホイールの操舵力をアシストする電動パワーステアリング装置においては、ステアリングホイールの多回転の回転位置を検出することが要求されている。しかも装置電源の立ち上り直後の未操舵状態時の回転位置も、多回転の絶対回転位置として検出することが求められている。ステアリングホイールと車輪を操舵させるステアリング機構部とを連結するステアリングシャフトに、モータの回転位置制御に用いられる従来のロータリーエンコーダやレゾルバを取り付けても、1回転(360°)未満での回転位置は検出できるが何回転目の回転位置なのかは分からない。
【0003】
この問題に対して、単一の回転センサとして多回転位置センサを実現した例がある。入力シャフトに第1の歯車を外装し、この歯車より歯数の大きい第2の歯車を第1の歯車に組み合わせて第2のシャフトに回転センサを取り付ければ、第2のシャフトの1回転が入力シャフトの多回転に対応するようになる。例えば、特許文献1の多回転角度測定器は、多数の歯車からなる機構として構成されている。また、特許文献2に開示されている方法によれば、レゾルバの輪状ロータの回転軸をねじ部を介してハウジングに螺合させ、回転による輪状ステータと輪状ロータとの軸方向の相対位置の変化に伴う出力電圧レベルの変化を検出することにより多回転絶対位置を得ることができる。更に特許文献3によれば、軸受の保持器に一体に組み付けられた回転位置センサにより回転輪の正負2.5回転の絶対位置を検出できる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−77483号公報
【特許文献2】特開2003−202243号公報
【特許文献3】特開2004−308724号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1及び特許文献2の従来例では歯車又はねじの機構を用いて、異なる回転軸を持つ歯車と組み合わせて構成しているため、径方向の寸法が大きくなるという問題と、これらの機構及び組立にコストを要するという問題がある。また、特許文献3の従来例では転動体が回転輪に対して相対的に滑らないように予圧をかけているので転動体の公転に伴って回転する保持器は回転輪に対して相対的にずれないと記載されているが、転動体のすべりは起こりうる現象であって、一旦すべりが起これば、特許文献3の従来例で述べられているような回転輪側の位置データと保持器側の位置データをもとに多回転の位置デーブルを参照して位置を求める方法では、もはや正確な位置は特定できないという問題がある。また、正負2.5回転を超えて絶対角度を得ようとするとき、正負2.5回転以上については角度位置を特定することができないという問題がある。更に、回転輪側及び保持器側の各々に2相のセンサ、計4個のセンサが必要でありコストと信頼性の低下の問題がある。
【0006】
本発明は、上記従来例の問題点に着目してなされたものであり、特別な機構を必要とせず、すなわち組立コストを要することなくコンパクトに製作が可能な多回転位置情報を生成できる多回転位置センサ付軸受を提供することを目的とする。更に、この多回転位置センサを組み込むことによって、ステアリング装置等の多回転の位置を制御する回転装置を低コストかつコンパクトに実現することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明は以下の多回転位置センサ付軸受及び回転装置を提供する。
(1)回転軌道輪、固定軌道輪、転動体及び保持器からなる転がり軸受部と、前記保持器に固着され磁気的特性が周方向に変化する保持器側の被検出部と、この保持器側の被検出部に対向した1相のアナログ出力の磁気的センサからなる第1の磁気的検出部と、回転軌道輪に固着され磁気的特性が周方向に変化する軌道輪側の被検出部と、この軌道輪側の被検出部に対向した2相のアナログ出力の磁気的センサからなる第2の磁気的検出部を備えた多回転位置センサ付軸受であって、前記軸受の回転軌道輪の所定数以下の整数の回転数において、前記回転軌道輪に対応して回転する保持器の回転数が整数又は整数の近傍値のいずれでもないことを特徴とする多回転位置センサ付軸受。
(2)上記(1)に記載の多回転位置センサ付軸受において、前記保持器側の被検出部の磁性材料と前記軌道輪側の被検出部の磁性材料は等しい温度特性を持ち、前記1相のアナログ出力の磁気的センサと前記2相のアナログ出力の磁気的センサは等しい温度特性を持つことを特徴とする多回転位置センサ付軸受。
(3)上記(1)又は(2)に記載の多回転位置センサ付軸受と回転位置読取装置を備えた回転装置であって、前記多回転位置センサ付軸受は前記回転装置の回転部を支承し、前記回転位置読取装置は前記多回転位置センサ付軸受の前記2相のアナログ出力を受けて前記回転軌道輪の1周上の第1の回転角度位置を検出し、前記1相のアナログ出力を受けて前記保持器の半周上の第2の回転角度位置を検出するとともに前記第1の回転角度位置と前記第2の回転角度位置から前記回転軌道輪の多回転角度位置を検出することを特徴とする回転装置。
(4)上記(3)に記載の回転装置であって、前記回転位置読取装置は内部メモリに記憶された前記第1の回転角度位置に対する前記第2の回転角度位置の比例定数を用いて前記多回転角度位置を検出するとともに、前記比例定数を計算し直して記憶することを特徴とする回転装置。
(5)上記(3)に記載の回転装置であって、前記回転位置読取装置は内部メモリに記憶された前記第1の回転角度位置に対する前記第2の回転角度位置の初期位相差を用いて前記多回転角度位置を検出するとともに、前記初期位相差を計算し直して記憶することを特徴とする回転装置。
【発明の効果】
【0008】
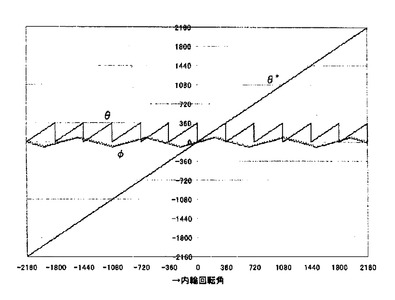
本発明の多回転位置センサ付軸受及び回転装置によれば、回転軌道輪である内輪が所定数以下の整数回だけ回転するとき、保持器の回転数が整数又は整数の近傍値のいずれでもないように設計された軸受を用いるので、たとえば図6に例示するように正負5回転(±1800°)を超える回転範囲を利用することができる。図6の横軸は内輪の回転の中央位置からの回転角度位置であって、左右それぞれ6回転の範囲を示している。鋸歯状の波形θは第1検出部から得られる0〜360°の範囲の角度のデータであり、三角波形Φは第2検出部から得られる±90°の範囲の角度のデータである。直線θはこれらをもとにして求められる検出位置である。さらなる多回転の位置検出も前記のように設計された軸受を用いれば可能である。そして、多回転位置センサ付軸受の第1の磁気検出部は1相のみのアナログ出力の磁気的センサを用いるので、2相のアナログ出力の磁気的センサを用いる場合よりコストの削減と信頼性の向上が可能である。
【0009】
また、本発明の多回転位置センサ付軸受は、軸受の予圧や温度等の状態変化にともなって変動する回転軌道輪の回転角と保持器の回転角の間の比例定数を、多回転位置を検出している最中にも随時更新するので、常時回転軌道輪の正確な回転角度位置が得られる。
【0010】
さらに、本発明の多回転位置センサ付軸受は、転動体の滑りに伴って保持器が不正確に回転することがあっても、多回転位置を検出している最中にも初期位相差を随時更新するので、常時回転軌道輪の正確な回転角度位置が得られる。
【図面の簡単な説明】
【0011】
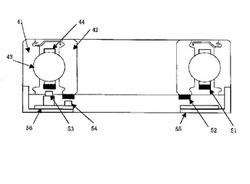
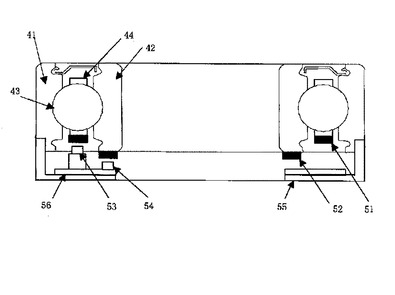
【図1】本発明に係る実施例である多回転位置センサ付軸受の断面図である。
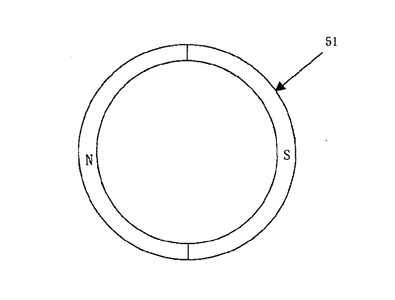
【図2】本発明に係る実施例である被検出部の磁石を示す図である。
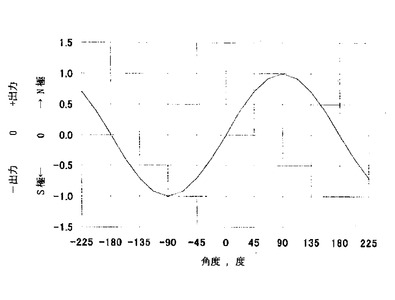
【図3】本発明に係る実施例である被検出部の磁石の着磁状態示す図である。
【図4】本発明に係る実施例の内輪の回転角度θ*、保持器側角度Φ及び内輪側角度θの関係を示す図である。
【図5】本発明に係る実施例の内輪側角度θと保持器側角度Φの関係を示す図である。
【図6】本発明に係る実施例の内輪の回転角度θ*、保持器側角度Φ及び内輪側角度θの関係を示す図である。
【図7】本発明に係る実施例での処理装置を示す図である。
【図8】本発明に係る実施例でのコンピュータによる処理のフローチャートを示す図である。
【発明を実施するための形態】
【0012】
以下、本発明について詳細に説明する。本発明の多回転位置センサ付軸受は、第1の磁気検出部の被検出部が軸受の保持器と同心に固着され、第2の磁気検出部の被検出部が軸受の回転軌道輪と同心に固着されるので、保持器側の第1の磁気検出部の被検出部が保持器の回転にともなって1回転する間に軌道輪側の第2の磁気検出部の被検出部は多数回回転する。その理由は以下のとおりである。
【0013】
例えば玉軸受の内輪が回転する場合、内輪の回転角θiと保持器の回転角θcの関係は次式のように表される。
【0014】
【数1】

【0015】
ここで、Dは玉径、dは玉の公転軌道径、αは玉と内外輪の軌道溝との接触角である。一般的な軸受のd、D及びαは、θi:θc≒5:2となっている。よって、内輪の5回転は保持器のほぼ2回転に対応していることになるので、内輪と保持器の各々にsin相とcos相の2信号を発生することができる回転位置センサを付ければ、特許文献3の多回転センサ付軸受のごとく、5回転までのセンサになりうる。
【0016】
本発明の多回転位置センサ付軸受の軸受は、回転軌道輪である内輪にはsin相とcos相の2信号を発生することができる回転位置センサを付け、保持器にはsin相又はcos相の1信号を発生することができる回転位置センサを付けて、5回転の範囲を超える所定の多回転位置センサを実現するために、回転輪の前記所定の回転までのどの整数回転の位置も保持器のいかなる整数又はその近傍値の回転の位置に対応しないように設計・製作したものである。このような軸受を用いれば、保持器がある整数回転もしくはその近傍値の回転数に至るまで、回転軌道輪が所定の整数回を超えて回転するときの多回転位置を検出できる多回転位置センサを実現できる。
【0017】
また、本発明の多回転位置センサ付軸受は、回転軌道輪側の位置検出部と保持器側の位置検出部に等質の磁性体と等特性の磁気センサを用いることによって、温度変化に対して両者の感度の比が一定となるようにしているので、軸受の予圧や温度等の状態変化に伴って変動する回転軌道輪の回転角と保持器の回転角の間の比例定数を、多回転位置を検出している最中にも随時更新する。
【0018】
また、本発明の多回転位置センサ付軸受は、保持器の回転運動が正確であることが必要であるが、回転装置、更にはステアリング装置等に応用するとき、急な加減速回転時あるいは衝撃を受けたときにごく微小ではあるが転動体が滑って保持器の回転が不正確になるおそれがある。そこで、多回転位置を検出している最中にも初期位相差を随時更新する。
【実施例】
【0019】
以下、図を用いて実施例を挙げて更に説明するが、本発明はこれにより何ら制限されるものではない。
【0020】
図1は本発明の多回転位置センサ付軸受の実施形態の例である。固定輪である外輪41と回転輪である内輪42と転動体である玉43と保持器44からなる玉軸受4の保持器44に磁石51が同心で接着固定され、カバー55の内側に固定されている円環状の基板56上に実装されている1個のホール素子53とともに保持器側の磁気的検出部である回転位置センサが構成されている。
【0021】
また、内輪42に磁石52が同心で接着固定され、基板56上に実装されている2個一組みのホール素子54とともに内輪側の磁気的検出部である回転位置センサが構成されている。磁石51及び52は図2に示すように円環状に2極に着磁されており、その着磁分布は図3に示すように正弦波状になっている。磁石51による磁束に対向して1個のホール素子53は磁石51の回転位相Φに対応してsinΦに比例する電圧信号を発生する。
【0022】
また、磁石52による磁束に対向して90°だけ離間している2個のホール素子54は磁石52の回転位相θに対応してそれぞれcosθとsinθに比例する電圧信号を発生する。組立てに際しては、ホール素子53とsinθ側のホール素子54は角度位置を一致させて取り付け、また磁石51と磁石52は各々S極とN極の境界位置を前記角度位置に一致させて取り付ける。前記の構成において、磁性材のプラスチックを成形し、その平坦な円環面を図2のように着磁して作られた保持器を用いても同様の効果が得られる。
【0023】
このような保持器を用いれば軸方向の長さに余裕ができるので設計上都合がよく、さらに固着された磁石のように剥がれることがないので信頼性が高い。また、保持器側の回転位置センサと内輪側の回転位置センサの一方又は両方とも、前記の円環状磁石と1相又は2相の磁気センサによるものに限らず、レゾルバを用いても同じ効果が得られる。レゾルバを用いれば、前記の回転位置センサより正確な正弦波の信号が得られるので、より高精度の位置検出が可能となる。
【0024】
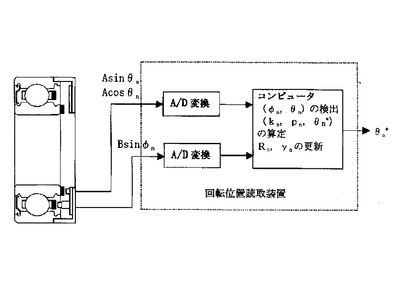
前記のcosθとsinθの対の信号とsinΦの信号は、図7に示す処理装置の概念図にあるように、対応する回転位置センサからAcosθ、Asinθ及びBsinΦとして出力される。これらは回転位置読取装置のA/Dコンバータを介してコンピュータに取り込まれ、θは0°から360°までのデジタル値に。また、−90°から+90°までのデジタル値に変換される。そしてコンピュータの中の処理によって内輪の多回転位置が計算される。
【0025】
本実施例では、内輪の10回転以上の範囲の角度位置を検出できる多回転位置センサ付軸受を構成する場合を説明する。通常の転がり軸受で実現できる内輪の回転数と保持器の回転数の比は、スラスト軸受に相当する2から大きくても3の値である。内輪の10回転以上を検出可能にするためには、前記回転数の比は、2、3、5/2、7/3、8/3及び9/4の中のいずれにも一致もしくは近づいてはならない。例えば、これらの値と異なり、12/5=2.4をもつ転がり軸受を設計し、製作したとすれば、内輪の回転角に対応して、各変換器からは前記のΦ及びθが図4のように出力される。
【0026】
図4で横軸は内輪の正負6回転内、すなわち±2160°の範囲の角度位置であり、θは内輪の回転角の360°ごとに0°と360°の間で鋸歯状に変化している。他方、Φは内輪の回転角の5/12の割合で+90°と−90°の間で緩い角度の三角波状に変化している。内輪の回転角度に対応するθは、図のコンピュータによって関数Tan−1xを使って公知の方法で算出することができるが、BsinΦから関数Sin−1xを使ってΦを計算するためにはBの値で割り算しなければならない。
【0027】
しかし、一般に磁気的検出は外部磁界や温度などの環境変動の影響を受けやすく、外部磁界の影響については磁気シールドの技術を応用したり、外部磁界と異なる周波数の交流磁界を用いる検出方式を採用することで避けることができるが、温度変動の影響については、何らかの補正対策が必要である。これにはθ側の振幅AをAcosθとAsinθの2乗和の平方根として計算し、このAを基準としてΦ側の振幅Bを補正することにより対応することができる。すなわち、内輪側と保持器側の磁気検出部は等しい温度特性を持っており、振幅Aと振幅Bは温度に対して同等に変化するので、所定の比r=B/Aと基準としたAを用いて、B=r×Aが計算でき、従ってBsinΦをこのBで割ってsinΦを得、更にΦを計算する。
【0028】
こうして得られたΦを横軸、そしてθを縦軸としてΦとθの関係をグラフにしたのが図5である。図5で点(0,0)は内輪の回転の中央位置であり、正方向へ回転するとき矢印方向に上昇してΦ=90°で左へ方向転換し、θ=360°に達すると下辺のθ=0°へ垂直に下がり、そこから左方向へ上昇してΦ=−90°で右へ方向転換し、θ=360°に達すると再び下辺のθ=0°へ下がり、また右方向へ上昇するというような軌跡をたどる。θ=360°に達した回数だけ正方向へ回転したことになる。
【0029】
負方向に回転するときは、点(0,0)と同じ点(0,360)から左方向へ下降してΦ=−90°で右へ方向転換して下辺のθ=0°に達すると上辺のθ=360°に行き、更に右方向へ下降して、Φ=90°で左へ方向転換し、θ=0°に達すると、再び上辺のθ=360°へ垂直に上がるというような軌跡をたどる。θ=0°に達した回数だけ負方向へ回転したことになる。本発明の目的のためには、同図の斜線のどれも重ならず、また、接近していないことが肝要である。
【0030】
次に、得られた対(Φ,θ)から内輪の真の回転角度(θ*とする)を求める方法を図7に示す処理装置の概念図と図8のフローチャートを参照して説明する。内輪側の2相のセンサの信号AcosθとAsinθとからBsinΦのA/D変換値から0°と360°の間のθを計算すると同時に前記したように振幅Aを計算する。Aと所定比rの積で保持器側の1相のセンサの信号BsinΦのA/D変換値を割ってからSin−1関数によって+90°と−90°の間のΦを計算する。
【0031】
次に、コンピュータは得られた対(Φ,θ)から内輪の真の回転角度θ*を次のようにして計算する。内輪の回転数と保持器の回転数の比の値をRとし、kとpを適当な整数とすると、θ及びΦとθ*との間には次式のような関係が成り立つ。
【0032】
(数2)
θ*=θ+360×k=R×(±Φ+180×p−γ)
【0033】
数2においてγは組立て時には0°であるべき保持器側の内輪に対する初期位相差であるが、転動体の滑りに伴って保持器が不正確に回転することがあると0°と異なる値となる。このγの更新については後述する。(Φ,θ)が得られたとき数2を満たす整数k、p及び+か−の適当な符号を見つければよい。このような探索はコンピュータが得意とするところである。
【0034】
本実施例の場合、k、pとも0,±1、±2、±3、±4又は±5である。なお、図4と図5では説明を簡単にするためγ=0としている。図5では点(0,0)からの正負いずれの軌跡の直線も重なってはいないが、交差している。つまりこの交差点の(Φ,θ)には2組の角度位置が対応する。しかし、軸受の回転中においてはその直前の角度検出時に探索して決定された角度位置に近いθ*及びkとpに等しいか近い値の組を選択すればよい。従って、あるΦに対応するθは必ず一つあり、また一つしかない。
【0035】
そして、数2を満たすkとpは一組しかなく、またそうなるように前記回転数の比の値Rを決めているのである。例えば、Φ=0°とθ=216°であるとき、γ=0°ならばk=3、p=3の場合のθ*=1296°とk=−3、p=−2の場合のθ*=−864°がありうる。また、Φ=15°とθ=36°であるとき、k=0、p=0かつ+の場合のθ*=36°とk=1、p=1かつ−の場合のθ*=396°がありうる。以上のいずれの例でも2つのθ*には大きな違いがあることから分かるように、直前の角度検出結果に近い値を容易に選択できる。
【0036】
図6はこのようにして得られる内輪の回転位置θ*と対(Φ,θ)をプロットしたものである。このように±5回転まで正確に検出できている。しかし、測定値である対(Φ,θ)はノイズ等の影響により必ずしも上のように等号が成り立つようには得られない。このような場合、数2の後の=は≒となるので、実用的には、少々の許容幅を設けて次式を満足するkとpを見つけるのがよい。
【0037】
(数3)
−ε<θ+360×k−R×(±Φ+180×p−γ)<ε
ここで、εは、例えば1°程度の小さい値とする。
【0038】
次に連続的に多回転位置を検出しているときに、比例定数Rと初期位相差γを更新する方法について説明する。回転装置の組み込まれた多回転センサ付軸受は、回転装置の稼動に伴って温度が上下動する。また、衝撃的に使用されることもあり、また、経年変化もある。比例定数Rと初期位相差γはコンピュータ内の不揮発性メモリに記憶され、随時内輪の回転位置θ*の計算に用いられるので、状況の変化に適正に追従しない限りθ*に絶対誤差が発生してしまう。このような不具合を解決するために、本発明に係わる角度位置読取装置は時々刻々Rとγの最新の状態を検出し、記憶して更新する。ある検出時点で得られた対(Φ1,θ1)に対しては次式
【0039】
(数4)
θ1*=θ1+360×k1≒R×(±Φ1+180×p1−γ)
【0040】
が成り立っており、k1、p1、θ1*及び+あるいは−とΦ1が決定される。また別の対(Φ2,θ2)に対しても同様に
【0041】
(数5)
θ2*=θ2+360×k2≒R×(±Φ2+180×p2−γ)
【0042】
が成り立っており、k2、p2、θ2*及び+あるいは−とΦ2が決定される。±Φ1と±Φ2を決定された符号を含めて各々[Φ1]及び[Φ2]と置けば、数4と数5で等号が成り立つときのRとγを計算できる。すなわち、
【0043】
【数6】
【0044】
となる。このRとγを(Φ1,θ1)と(Φ2,θ2)が発生した期間における真の値とみなす。これらをメモリに記憶して更新する。このような更新は、回転装置の電源が入ってからしばらくの間は比較的頻繁に行い、定常的な状態になっている期間は粗い間隔で行えばよい。
【産業上の利用可能性】
【0045】
本発明の多回転位置センサ付軸受は、自動車用の電動パワーステアリングの操舵角を測定する簡便な機構に貢献するものであるが、更なる多回転の用途にも好適である。例えば、本発明の多回転位置センサ付軸受を用いて精密ボールねじを支持すれば、ボールねじの回転によって直線運動するステージの絶対位置を、ボールねじの絶対回転角度から計算することができるので、リニアスケールが必要でなくなる。また、電源を切断している間にステージの移動があっても、電源の投入直後に絶対位置を知ることができるので、原点復帰などの動作を省くことも可能となる。
【符号の説明】
【0046】
4…玉軸受、41…外輪、42…内輪、43…玉、44…保持器
51,52…磁石、53,54…ホール素子、55…カバー、56…基板
【技術分野】
【0001】
本発明は、多回転の絶対位置信号を生成する回転位置センサを備える軸受及び回転装置に関し、特に自動車のステアリングホイールの絶対操舵位置を検出するのに好適な多回転位置センサ付軸受及び回転装置に関する。
【背景技術】
【0002】
従来より、モータとロータリーエンコーダからなる回転制御装置のコンパクト化と低コスト化を目的として、モータ内の軸受にエンコーダの機能を付した回転センサ付軸受が各種提案されている。これにはレゾルバなどのような回転位置を検出可能なタイプの回転センサを付した軸受もあるが、360°を超える多回転の回転位置情報を得られるものではない。近年、ステアリングホイールの操舵力をアシストする電動パワーステアリング装置においては、ステアリングホイールの多回転の回転位置を検出することが要求されている。しかも装置電源の立ち上り直後の未操舵状態時の回転位置も、多回転の絶対回転位置として検出することが求められている。ステアリングホイールと車輪を操舵させるステアリング機構部とを連結するステアリングシャフトに、モータの回転位置制御に用いられる従来のロータリーエンコーダやレゾルバを取り付けても、1回転(360°)未満での回転位置は検出できるが何回転目の回転位置なのかは分からない。
【0003】
この問題に対して、単一の回転センサとして多回転位置センサを実現した例がある。入力シャフトに第1の歯車を外装し、この歯車より歯数の大きい第2の歯車を第1の歯車に組み合わせて第2のシャフトに回転センサを取り付ければ、第2のシャフトの1回転が入力シャフトの多回転に対応するようになる。例えば、特許文献1の多回転角度測定器は、多数の歯車からなる機構として構成されている。また、特許文献2に開示されている方法によれば、レゾルバの輪状ロータの回転軸をねじ部を介してハウジングに螺合させ、回転による輪状ステータと輪状ロータとの軸方向の相対位置の変化に伴う出力電圧レベルの変化を検出することにより多回転絶対位置を得ることができる。更に特許文献3によれば、軸受の保持器に一体に組み付けられた回転位置センサにより回転輪の正負2.5回転の絶対位置を検出できる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−77483号公報
【特許文献2】特開2003−202243号公報
【特許文献3】特開2004−308724号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1及び特許文献2の従来例では歯車又はねじの機構を用いて、異なる回転軸を持つ歯車と組み合わせて構成しているため、径方向の寸法が大きくなるという問題と、これらの機構及び組立にコストを要するという問題がある。また、特許文献3の従来例では転動体が回転輪に対して相対的に滑らないように予圧をかけているので転動体の公転に伴って回転する保持器は回転輪に対して相対的にずれないと記載されているが、転動体のすべりは起こりうる現象であって、一旦すべりが起これば、特許文献3の従来例で述べられているような回転輪側の位置データと保持器側の位置データをもとに多回転の位置デーブルを参照して位置を求める方法では、もはや正確な位置は特定できないという問題がある。また、正負2.5回転を超えて絶対角度を得ようとするとき、正負2.5回転以上については角度位置を特定することができないという問題がある。更に、回転輪側及び保持器側の各々に2相のセンサ、計4個のセンサが必要でありコストと信頼性の低下の問題がある。
【0006】
本発明は、上記従来例の問題点に着目してなされたものであり、特別な機構を必要とせず、すなわち組立コストを要することなくコンパクトに製作が可能な多回転位置情報を生成できる多回転位置センサ付軸受を提供することを目的とする。更に、この多回転位置センサを組み込むことによって、ステアリング装置等の多回転の位置を制御する回転装置を低コストかつコンパクトに実現することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明は以下の多回転位置センサ付軸受及び回転装置を提供する。
(1)回転軌道輪、固定軌道輪、転動体及び保持器からなる転がり軸受部と、前記保持器に固着され磁気的特性が周方向に変化する保持器側の被検出部と、この保持器側の被検出部に対向した1相のアナログ出力の磁気的センサからなる第1の磁気的検出部と、回転軌道輪に固着され磁気的特性が周方向に変化する軌道輪側の被検出部と、この軌道輪側の被検出部に対向した2相のアナログ出力の磁気的センサからなる第2の磁気的検出部を備えた多回転位置センサ付軸受であって、前記軸受の回転軌道輪の所定数以下の整数の回転数において、前記回転軌道輪に対応して回転する保持器の回転数が整数又は整数の近傍値のいずれでもないことを特徴とする多回転位置センサ付軸受。
(2)上記(1)に記載の多回転位置センサ付軸受において、前記保持器側の被検出部の磁性材料と前記軌道輪側の被検出部の磁性材料は等しい温度特性を持ち、前記1相のアナログ出力の磁気的センサと前記2相のアナログ出力の磁気的センサは等しい温度特性を持つことを特徴とする多回転位置センサ付軸受。
(3)上記(1)又は(2)に記載の多回転位置センサ付軸受と回転位置読取装置を備えた回転装置であって、前記多回転位置センサ付軸受は前記回転装置の回転部を支承し、前記回転位置読取装置は前記多回転位置センサ付軸受の前記2相のアナログ出力を受けて前記回転軌道輪の1周上の第1の回転角度位置を検出し、前記1相のアナログ出力を受けて前記保持器の半周上の第2の回転角度位置を検出するとともに前記第1の回転角度位置と前記第2の回転角度位置から前記回転軌道輪の多回転角度位置を検出することを特徴とする回転装置。
(4)上記(3)に記載の回転装置であって、前記回転位置読取装置は内部メモリに記憶された前記第1の回転角度位置に対する前記第2の回転角度位置の比例定数を用いて前記多回転角度位置を検出するとともに、前記比例定数を計算し直して記憶することを特徴とする回転装置。
(5)上記(3)に記載の回転装置であって、前記回転位置読取装置は内部メモリに記憶された前記第1の回転角度位置に対する前記第2の回転角度位置の初期位相差を用いて前記多回転角度位置を検出するとともに、前記初期位相差を計算し直して記憶することを特徴とする回転装置。
【発明の効果】
【0008】
本発明の多回転位置センサ付軸受及び回転装置によれば、回転軌道輪である内輪が所定数以下の整数回だけ回転するとき、保持器の回転数が整数又は整数の近傍値のいずれでもないように設計された軸受を用いるので、たとえば図6に例示するように正負5回転(±1800°)を超える回転範囲を利用することができる。図6の横軸は内輪の回転の中央位置からの回転角度位置であって、左右それぞれ6回転の範囲を示している。鋸歯状の波形θは第1検出部から得られる0〜360°の範囲の角度のデータであり、三角波形Φは第2検出部から得られる±90°の範囲の角度のデータである。直線θはこれらをもとにして求められる検出位置である。さらなる多回転の位置検出も前記のように設計された軸受を用いれば可能である。そして、多回転位置センサ付軸受の第1の磁気検出部は1相のみのアナログ出力の磁気的センサを用いるので、2相のアナログ出力の磁気的センサを用いる場合よりコストの削減と信頼性の向上が可能である。
【0009】
また、本発明の多回転位置センサ付軸受は、軸受の予圧や温度等の状態変化にともなって変動する回転軌道輪の回転角と保持器の回転角の間の比例定数を、多回転位置を検出している最中にも随時更新するので、常時回転軌道輪の正確な回転角度位置が得られる。
【0010】
さらに、本発明の多回転位置センサ付軸受は、転動体の滑りに伴って保持器が不正確に回転することがあっても、多回転位置を検出している最中にも初期位相差を随時更新するので、常時回転軌道輪の正確な回転角度位置が得られる。
【図面の簡単な説明】
【0011】
【図1】本発明に係る実施例である多回転位置センサ付軸受の断面図である。
【図2】本発明に係る実施例である被検出部の磁石を示す図である。
【図3】本発明に係る実施例である被検出部の磁石の着磁状態示す図である。
【図4】本発明に係る実施例の内輪の回転角度θ*、保持器側角度Φ及び内輪側角度θの関係を示す図である。
【図5】本発明に係る実施例の内輪側角度θと保持器側角度Φの関係を示す図である。
【図6】本発明に係る実施例の内輪の回転角度θ*、保持器側角度Φ及び内輪側角度θの関係を示す図である。
【図7】本発明に係る実施例での処理装置を示す図である。
【図8】本発明に係る実施例でのコンピュータによる処理のフローチャートを示す図である。
【発明を実施するための形態】
【0012】
以下、本発明について詳細に説明する。本発明の多回転位置センサ付軸受は、第1の磁気検出部の被検出部が軸受の保持器と同心に固着され、第2の磁気検出部の被検出部が軸受の回転軌道輪と同心に固着されるので、保持器側の第1の磁気検出部の被検出部が保持器の回転にともなって1回転する間に軌道輪側の第2の磁気検出部の被検出部は多数回回転する。その理由は以下のとおりである。
【0013】
例えば玉軸受の内輪が回転する場合、内輪の回転角θiと保持器の回転角θcの関係は次式のように表される。
【0014】
【数1】
【0015】
ここで、Dは玉径、dは玉の公転軌道径、αは玉と内外輪の軌道溝との接触角である。一般的な軸受のd、D及びαは、θi:θc≒5:2となっている。よって、内輪の5回転は保持器のほぼ2回転に対応していることになるので、内輪と保持器の各々にsin相とcos相の2信号を発生することができる回転位置センサを付ければ、特許文献3の多回転センサ付軸受のごとく、5回転までのセンサになりうる。
【0016】
本発明の多回転位置センサ付軸受の軸受は、回転軌道輪である内輪にはsin相とcos相の2信号を発生することができる回転位置センサを付け、保持器にはsin相又はcos相の1信号を発生することができる回転位置センサを付けて、5回転の範囲を超える所定の多回転位置センサを実現するために、回転輪の前記所定の回転までのどの整数回転の位置も保持器のいかなる整数又はその近傍値の回転の位置に対応しないように設計・製作したものである。このような軸受を用いれば、保持器がある整数回転もしくはその近傍値の回転数に至るまで、回転軌道輪が所定の整数回を超えて回転するときの多回転位置を検出できる多回転位置センサを実現できる。
【0017】
また、本発明の多回転位置センサ付軸受は、回転軌道輪側の位置検出部と保持器側の位置検出部に等質の磁性体と等特性の磁気センサを用いることによって、温度変化に対して両者の感度の比が一定となるようにしているので、軸受の予圧や温度等の状態変化に伴って変動する回転軌道輪の回転角と保持器の回転角の間の比例定数を、多回転位置を検出している最中にも随時更新する。
【0018】
また、本発明の多回転位置センサ付軸受は、保持器の回転運動が正確であることが必要であるが、回転装置、更にはステアリング装置等に応用するとき、急な加減速回転時あるいは衝撃を受けたときにごく微小ではあるが転動体が滑って保持器の回転が不正確になるおそれがある。そこで、多回転位置を検出している最中にも初期位相差を随時更新する。
【実施例】
【0019】
以下、図を用いて実施例を挙げて更に説明するが、本発明はこれにより何ら制限されるものではない。
【0020】
図1は本発明の多回転位置センサ付軸受の実施形態の例である。固定輪である外輪41と回転輪である内輪42と転動体である玉43と保持器44からなる玉軸受4の保持器44に磁石51が同心で接着固定され、カバー55の内側に固定されている円環状の基板56上に実装されている1個のホール素子53とともに保持器側の磁気的検出部である回転位置センサが構成されている。
【0021】
また、内輪42に磁石52が同心で接着固定され、基板56上に実装されている2個一組みのホール素子54とともに内輪側の磁気的検出部である回転位置センサが構成されている。磁石51及び52は図2に示すように円環状に2極に着磁されており、その着磁分布は図3に示すように正弦波状になっている。磁石51による磁束に対向して1個のホール素子53は磁石51の回転位相Φに対応してsinΦに比例する電圧信号を発生する。
【0022】
また、磁石52による磁束に対向して90°だけ離間している2個のホール素子54は磁石52の回転位相θに対応してそれぞれcosθとsinθに比例する電圧信号を発生する。組立てに際しては、ホール素子53とsinθ側のホール素子54は角度位置を一致させて取り付け、また磁石51と磁石52は各々S極とN極の境界位置を前記角度位置に一致させて取り付ける。前記の構成において、磁性材のプラスチックを成形し、その平坦な円環面を図2のように着磁して作られた保持器を用いても同様の効果が得られる。
【0023】
このような保持器を用いれば軸方向の長さに余裕ができるので設計上都合がよく、さらに固着された磁石のように剥がれることがないので信頼性が高い。また、保持器側の回転位置センサと内輪側の回転位置センサの一方又は両方とも、前記の円環状磁石と1相又は2相の磁気センサによるものに限らず、レゾルバを用いても同じ効果が得られる。レゾルバを用いれば、前記の回転位置センサより正確な正弦波の信号が得られるので、より高精度の位置検出が可能となる。
【0024】
前記のcosθとsinθの対の信号とsinΦの信号は、図7に示す処理装置の概念図にあるように、対応する回転位置センサからAcosθ、Asinθ及びBsinΦとして出力される。これらは回転位置読取装置のA/Dコンバータを介してコンピュータに取り込まれ、θは0°から360°までのデジタル値に。また、−90°から+90°までのデジタル値に変換される。そしてコンピュータの中の処理によって内輪の多回転位置が計算される。
【0025】
本実施例では、内輪の10回転以上の範囲の角度位置を検出できる多回転位置センサ付軸受を構成する場合を説明する。通常の転がり軸受で実現できる内輪の回転数と保持器の回転数の比は、スラスト軸受に相当する2から大きくても3の値である。内輪の10回転以上を検出可能にするためには、前記回転数の比は、2、3、5/2、7/3、8/3及び9/4の中のいずれにも一致もしくは近づいてはならない。例えば、これらの値と異なり、12/5=2.4をもつ転がり軸受を設計し、製作したとすれば、内輪の回転角に対応して、各変換器からは前記のΦ及びθが図4のように出力される。
【0026】
図4で横軸は内輪の正負6回転内、すなわち±2160°の範囲の角度位置であり、θは内輪の回転角の360°ごとに0°と360°の間で鋸歯状に変化している。他方、Φは内輪の回転角の5/12の割合で+90°と−90°の間で緩い角度の三角波状に変化している。内輪の回転角度に対応するθは、図のコンピュータによって関数Tan−1xを使って公知の方法で算出することができるが、BsinΦから関数Sin−1xを使ってΦを計算するためにはBの値で割り算しなければならない。
【0027】
しかし、一般に磁気的検出は外部磁界や温度などの環境変動の影響を受けやすく、外部磁界の影響については磁気シールドの技術を応用したり、外部磁界と異なる周波数の交流磁界を用いる検出方式を採用することで避けることができるが、温度変動の影響については、何らかの補正対策が必要である。これにはθ側の振幅AをAcosθとAsinθの2乗和の平方根として計算し、このAを基準としてΦ側の振幅Bを補正することにより対応することができる。すなわち、内輪側と保持器側の磁気検出部は等しい温度特性を持っており、振幅Aと振幅Bは温度に対して同等に変化するので、所定の比r=B/Aと基準としたAを用いて、B=r×Aが計算でき、従ってBsinΦをこのBで割ってsinΦを得、更にΦを計算する。
【0028】
こうして得られたΦを横軸、そしてθを縦軸としてΦとθの関係をグラフにしたのが図5である。図5で点(0,0)は内輪の回転の中央位置であり、正方向へ回転するとき矢印方向に上昇してΦ=90°で左へ方向転換し、θ=360°に達すると下辺のθ=0°へ垂直に下がり、そこから左方向へ上昇してΦ=−90°で右へ方向転換し、θ=360°に達すると再び下辺のθ=0°へ下がり、また右方向へ上昇するというような軌跡をたどる。θ=360°に達した回数だけ正方向へ回転したことになる。
【0029】
負方向に回転するときは、点(0,0)と同じ点(0,360)から左方向へ下降してΦ=−90°で右へ方向転換して下辺のθ=0°に達すると上辺のθ=360°に行き、更に右方向へ下降して、Φ=90°で左へ方向転換し、θ=0°に達すると、再び上辺のθ=360°へ垂直に上がるというような軌跡をたどる。θ=0°に達した回数だけ負方向へ回転したことになる。本発明の目的のためには、同図の斜線のどれも重ならず、また、接近していないことが肝要である。
【0030】
次に、得られた対(Φ,θ)から内輪の真の回転角度(θ*とする)を求める方法を図7に示す処理装置の概念図と図8のフローチャートを参照して説明する。内輪側の2相のセンサの信号AcosθとAsinθとからBsinΦのA/D変換値から0°と360°の間のθを計算すると同時に前記したように振幅Aを計算する。Aと所定比rの積で保持器側の1相のセンサの信号BsinΦのA/D変換値を割ってからSin−1関数によって+90°と−90°の間のΦを計算する。
【0031】
次に、コンピュータは得られた対(Φ,θ)から内輪の真の回転角度θ*を次のようにして計算する。内輪の回転数と保持器の回転数の比の値をRとし、kとpを適当な整数とすると、θ及びΦとθ*との間には次式のような関係が成り立つ。
【0032】
(数2)
θ*=θ+360×k=R×(±Φ+180×p−γ)
【0033】
数2においてγは組立て時には0°であるべき保持器側の内輪に対する初期位相差であるが、転動体の滑りに伴って保持器が不正確に回転することがあると0°と異なる値となる。このγの更新については後述する。(Φ,θ)が得られたとき数2を満たす整数k、p及び+か−の適当な符号を見つければよい。このような探索はコンピュータが得意とするところである。
【0034】
本実施例の場合、k、pとも0,±1、±2、±3、±4又は±5である。なお、図4と図5では説明を簡単にするためγ=0としている。図5では点(0,0)からの正負いずれの軌跡の直線も重なってはいないが、交差している。つまりこの交差点の(Φ,θ)には2組の角度位置が対応する。しかし、軸受の回転中においてはその直前の角度検出時に探索して決定された角度位置に近いθ*及びkとpに等しいか近い値の組を選択すればよい。従って、あるΦに対応するθは必ず一つあり、また一つしかない。
【0035】
そして、数2を満たすkとpは一組しかなく、またそうなるように前記回転数の比の値Rを決めているのである。例えば、Φ=0°とθ=216°であるとき、γ=0°ならばk=3、p=3の場合のθ*=1296°とk=−3、p=−2の場合のθ*=−864°がありうる。また、Φ=15°とθ=36°であるとき、k=0、p=0かつ+の場合のθ*=36°とk=1、p=1かつ−の場合のθ*=396°がありうる。以上のいずれの例でも2つのθ*には大きな違いがあることから分かるように、直前の角度検出結果に近い値を容易に選択できる。
【0036】
図6はこのようにして得られる内輪の回転位置θ*と対(Φ,θ)をプロットしたものである。このように±5回転まで正確に検出できている。しかし、測定値である対(Φ,θ)はノイズ等の影響により必ずしも上のように等号が成り立つようには得られない。このような場合、数2の後の=は≒となるので、実用的には、少々の許容幅を設けて次式を満足するkとpを見つけるのがよい。
【0037】
(数3)
−ε<θ+360×k−R×(±Φ+180×p−γ)<ε
ここで、εは、例えば1°程度の小さい値とする。
【0038】
次に連続的に多回転位置を検出しているときに、比例定数Rと初期位相差γを更新する方法について説明する。回転装置の組み込まれた多回転センサ付軸受は、回転装置の稼動に伴って温度が上下動する。また、衝撃的に使用されることもあり、また、経年変化もある。比例定数Rと初期位相差γはコンピュータ内の不揮発性メモリに記憶され、随時内輪の回転位置θ*の計算に用いられるので、状況の変化に適正に追従しない限りθ*に絶対誤差が発生してしまう。このような不具合を解決するために、本発明に係わる角度位置読取装置は時々刻々Rとγの最新の状態を検出し、記憶して更新する。ある検出時点で得られた対(Φ1,θ1)に対しては次式
【0039】
(数4)
θ1*=θ1+360×k1≒R×(±Φ1+180×p1−γ)
【0040】
が成り立っており、k1、p1、θ1*及び+あるいは−とΦ1が決定される。また別の対(Φ2,θ2)に対しても同様に
【0041】
(数5)
θ2*=θ2+360×k2≒R×(±Φ2+180×p2−γ)
【0042】
が成り立っており、k2、p2、θ2*及び+あるいは−とΦ2が決定される。±Φ1と±Φ2を決定された符号を含めて各々[Φ1]及び[Φ2]と置けば、数4と数5で等号が成り立つときのRとγを計算できる。すなわち、
【0043】
【数6】
【0044】
となる。このRとγを(Φ1,θ1)と(Φ2,θ2)が発生した期間における真の値とみなす。これらをメモリに記憶して更新する。このような更新は、回転装置の電源が入ってからしばらくの間は比較的頻繁に行い、定常的な状態になっている期間は粗い間隔で行えばよい。
【産業上の利用可能性】
【0045】
本発明の多回転位置センサ付軸受は、自動車用の電動パワーステアリングの操舵角を測定する簡便な機構に貢献するものであるが、更なる多回転の用途にも好適である。例えば、本発明の多回転位置センサ付軸受を用いて精密ボールねじを支持すれば、ボールねじの回転によって直線運動するステージの絶対位置を、ボールねじの絶対回転角度から計算することができるので、リニアスケールが必要でなくなる。また、電源を切断している間にステージの移動があっても、電源の投入直後に絶対位置を知ることができるので、原点復帰などの動作を省くことも可能となる。
【符号の説明】
【0046】
4…玉軸受、41…外輪、42…内輪、43…玉、44…保持器
51,52…磁石、53,54…ホール素子、55…カバー、56…基板
【特許請求の範囲】
【請求項1】
回転軌道輪、固定軌道輪、転動体及び保持器からなる転がり軸受部と、前記保持器に固着され磁気的特性が周方向に変化する保持器側の被検出部と、この保持器側の被検出部に対向した1相のアナログ出力の磁気的センサからなる第1の磁気的検出部と、回転軌道輪に固着され磁気的特性が周方向に変化する軌道輪側の被検出部と、この軌道輪側の被検出部に対向した2相のアナログ出力の磁気的センサからなる第2の磁気的検出部を備えた多回転位置センサ付軸受であって、前記軸受の回転軌道輪の所定数以下の整数の回転数において、前記回転軌道輪に対応して回転する保持器の回転数が整数又は整数の近傍値のいずれでもないことを特徴とする多回転位置センサ付軸受。
【請求項2】
請求項1に記載の多回転位置センサ付軸受において、前記保持器側の被検出部の磁性材料と前記軌道輪側の被検出部の磁性材料は等しい温度特性を持ち、前記1相のアナログ出力の磁気的センサと前記2相のアナログ出力の磁気的センサは等しい温度特性を持つことを特徴とする多回転位置センサ付軸受。
【請求項3】
請求項1又は請求項2に記載の多回転位置センサ付軸受と回転位置読取装置を備えた回転装置であって、前記多回転位置センサ付軸受は前記回転装置の回転部を支承し、前記回転位置読取装置は前記多回転位置センサ付軸受の前記2相のアナログ出力を受けて前記回転軌道輪の1周上の第1の回転角度位置を検出し、前記1相のアナログ出力を受けて前記保持器の半周上の第2の回転角度位置を検出するとともに前記第1の回転角度位置と前記第2の回転角度位置から前記回転軌道輪の多回転角度位置を検出することを特徴とする回転装置。
【請求項4】
請求項3に記載の回転装置であって、前記回転位置読取装置は内部メモリに記憶された前記第1の回転角度位置に対する前記第2の回転角度位置の比例定数を用いて前記多回転角度位置を検出するとともに、前記比例定数を計算し直して記憶することを特徴とする回転装置。
【請求項5】
請求項3に記載の回転装置であって、前記回転位置読取装置は内部メモリに記憶された前記第1の回転角度位置に対する前記第2の回転角度位置の初期位相差を用いて前記多回転角度位置を検出するとともに、前記初期位相差を計算し直して記憶することを特徴とする回転装置。
【請求項1】
回転軌道輪、固定軌道輪、転動体及び保持器からなる転がり軸受部と、前記保持器に固着され磁気的特性が周方向に変化する保持器側の被検出部と、この保持器側の被検出部に対向した1相のアナログ出力の磁気的センサからなる第1の磁気的検出部と、回転軌道輪に固着され磁気的特性が周方向に変化する軌道輪側の被検出部と、この軌道輪側の被検出部に対向した2相のアナログ出力の磁気的センサからなる第2の磁気的検出部を備えた多回転位置センサ付軸受であって、前記軸受の回転軌道輪の所定数以下の整数の回転数において、前記回転軌道輪に対応して回転する保持器の回転数が整数又は整数の近傍値のいずれでもないことを特徴とする多回転位置センサ付軸受。
【請求項2】
請求項1に記載の多回転位置センサ付軸受において、前記保持器側の被検出部の磁性材料と前記軌道輪側の被検出部の磁性材料は等しい温度特性を持ち、前記1相のアナログ出力の磁気的センサと前記2相のアナログ出力の磁気的センサは等しい温度特性を持つことを特徴とする多回転位置センサ付軸受。
【請求項3】
請求項1又は請求項2に記載の多回転位置センサ付軸受と回転位置読取装置を備えた回転装置であって、前記多回転位置センサ付軸受は前記回転装置の回転部を支承し、前記回転位置読取装置は前記多回転位置センサ付軸受の前記2相のアナログ出力を受けて前記回転軌道輪の1周上の第1の回転角度位置を検出し、前記1相のアナログ出力を受けて前記保持器の半周上の第2の回転角度位置を検出するとともに前記第1の回転角度位置と前記第2の回転角度位置から前記回転軌道輪の多回転角度位置を検出することを特徴とする回転装置。
【請求項4】
請求項3に記載の回転装置であって、前記回転位置読取装置は内部メモリに記憶された前記第1の回転角度位置に対する前記第2の回転角度位置の比例定数を用いて前記多回転角度位置を検出するとともに、前記比例定数を計算し直して記憶することを特徴とする回転装置。
【請求項5】
請求項3に記載の回転装置であって、前記回転位置読取装置は内部メモリに記憶された前記第1の回転角度位置に対する前記第2の回転角度位置の初期位相差を用いて前記多回転角度位置を検出するとともに、前記初期位相差を計算し直して記憶することを特徴とする回転装置。
【図1】

【図2】
【図3】
【図4】

【図5】

【図6】
【図7】
【図8】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−177383(P2012−177383A)
【公開日】平成24年9月13日(2012.9.13)
【国際特許分類】
【出願番号】特願2011−39120(P2011−39120)
【出願日】平成23年2月25日(2011.2.25)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
【公開日】平成24年9月13日(2012.9.13)
【国際特許分類】
【出願日】平成23年2月25日(2011.2.25)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
[ Back to top ]