
多方向スイッチ部材およびそれを備える電子機器
【課題】
電子機器において、より簡単な操作にて多くの機能を実行することができるようにする。
【解決手段】
本発明は、その面内にて多方向の操作を可能とし、その面内の多方向において表裏方向に押圧操作可能な1または2以上の多方向キー12と、多方向キー12からの押圧を検知するための印刷回路基板20とを備え、多方向キー12の裏方向の複数箇所に、印刷回路基板20への押圧の強さにより接触面積を変える弾性変形可能な導電性弾性体14をそれぞれ有し、印刷回路基板20の表側において導電性弾性体14と接触可能な位置には、導電性弾性体14の接触により導通する複数の電極から構成される接点電極群をそれぞれ有し、多方向キー12の面内の多方向の内の少なくとも一つの方向において、多方向キー12の裏方向には、導電性弾性体14の接点電極群への接触より強い押圧により入力されるスイッチ56,58等を有する多方向スイッチ部材2である。
電子機器において、より簡単な操作にて多くの機能を実行することができるようにする。
【解決手段】
本発明は、その面内にて多方向の操作を可能とし、その面内の多方向において表裏方向に押圧操作可能な1または2以上の多方向キー12と、多方向キー12からの押圧を検知するための印刷回路基板20とを備え、多方向キー12の裏方向の複数箇所に、印刷回路基板20への押圧の強さにより接触面積を変える弾性変形可能な導電性弾性体14をそれぞれ有し、印刷回路基板20の表側において導電性弾性体14と接触可能な位置には、導電性弾性体14の接触により導通する複数の電極から構成される接点電極群をそれぞれ有し、多方向キー12の面内の多方向の内の少なくとも一つの方向において、多方向キー12の裏方向には、導電性弾性体14の接点電極群への接触より強い押圧により入力されるスイッチ56,58等を有する多方向スイッチ部材2である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、面内の複数方向において操作可能な多方向スイッチ部材およびそれを備える電子機器に関するものである。
【背景技術】
【0002】
携帯電話、カーナビゲーション装置、モバイルPC等の電子機器には、行き先を検索、設定、複数の経路を地図上に表示させるといったナビゲーション機能を持つソフトウェアをインストールし、それを実行できるものが多い。また、音楽再生装置のような電子機器の場合には、インターネットを介して外部サーバにアクセスし、あるいはCD−ROMのような情報記憶媒体から大量の音楽データを音楽再生装置内部のメモリに記憶し、その中から所望の音楽データを検索して再生することができるものがある。このような、検索、設定、表示といった機能を手軽に実行するため、上記のような電子機器として、少なくとも上下左右の複数方向に操作できる単一のコントローラを備えるものが知られている(特許文献1、特許文献2を参照)。
【0003】
例えば、ナビゲーション機能を持つソフトウェアを実行する際に、単一のコントローラの面内各方向に、各方向への移動機能が割り当てられることにより、例えば、右方向を押圧するとカーソルを右方向(あるいは地図画面を左方向)に、上方向を押圧するとカーソルを上方向(あるいは地図画面を下方向)に移動させることができる。また、音楽データの検索を行う際に、例えば、単一のコントローラの面内下方を押圧することにより、多くのミュージシャンのリスト表示をスクロールすることができ、所望のミュージシャンの位置で面内下方の押圧を終了した後、面内右方向を押圧することにより当該ミュージシャンの曲名を表示させることも可能である。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】米国特許第6,441,753号
【特許文献2】米国特許第7,348,967号
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上記従来の電子機器には、次のような問題がある。それは、多方向にて押圧可能なコントローラの各方向が単一の機能しか発揮できないことである。例えば、あるソフトウェアを実行している場合、コントローラの面内右方向を押圧したときには、右方向へのカーソルの移動、特定のメニューの表示等の単一の機能しか実行できない。ソフトウェアの機能が益々複雑になる中、このような不都合を低減するために、各方向の押圧順の組み合わせにより異なる機能を実行できるようにする方法も考えられる。しかし、各方向を多数操作するのは、操作者にとって煩わしく、かつそれを記憶するのも困難である。
【0006】
本発明は、上記のような問題に鑑みてなされたものであって、電子機器において、より簡単な操作にて多くの機能を実行することができるようにすることを目的とする。
【課題を解決するための手段】
【0007】
上記目的を解決するための本発明の一形態は、その面内にて多方向の操作を可能とする多方向スイッチ部材であって、その面内の多方向において表裏方向に押圧操作可能な1または2以上の多方向キーと、多方向キーからの押圧を検知するための印刷回路基板とを備え、多方向キーの裏方向の複数箇所に、印刷回路基板への押圧の強さにより接触面積を変える弾性変形可能な導電性弾性体をそれぞれ有し、印刷回路基板の表側において導電性弾性体と接触可能な位置には、導電性弾性体の接触により導通する複数の電極から構成される接点電極群をそれぞれ有し、多方向キーの面内の多方向の内の少なくとも一つの方向において、多方向キーの裏方向には、導電性弾性体の接点電極群への接触より強い押圧により入力されるスイッチを有する多方向スイッチ部材である。
【0008】
また、本発明の別の形態は、スイッチを、非接触状態の複数の電極と、その一部の電極と接続される弾性変形可能なドームとを有するドーム型のスイッチとする多方向スイッチ部材である。
【0009】
また、本発明の一形態は、上述の各多方向スイッチ部材を備える電子機器である。
【0010】
また、本発明の別の形態は、多方向スイッチ部材の操作に基づく処理を制御する制御部を備え、その制御部に、導電性弾性体が接点電極群に接触する面積の大きさに応じて、表示体若しくはその背景の移動速度あるいは当該表示体の拡大若しくは縮小速度を変える速度変更手段と、スイッチの入力により速度変更手段による処理を終了する処理終了手段とを備える電子機器である。
【0011】
また、本発明の別の形態は、処理終了手段を、速度変更手段による処理を終了すると共に、別の画面の表示を行う手段とする電子機器である。
【発明の効果】
【0012】
本発明によれば、電子機器において、より簡単な操作にて多くの機能を実行することができる。
【図面の簡単な説明】
【0013】
【図1】図1は、本発明の実施の形態に係る電子機器の一例である携帯電話の正面図である。
【図2】図2は、図1に示す多方向スイッチ部材を携帯電話から取り外して表方向から一部透過的に見た状態を示す図である。
【図3】図3は、図2に示す多方向スイッチ部材のA−A線断面図である。
【図4】図4は、PCBの平面図である。
【図5】図5は、図4に示すPCBからメタルドームを除いた状態を示す平面図である。
【図6】図6は、多方向キー上の東方向のやや北東寄りの方向を押圧操作した際の各接点電極群への接触領域と、その際の操作方向の特定方法を説明するための図である。
【図7】図7は、多方向キーの面内の東方向を段階的に押圧したときの多方向スイッチ部材の状況を示す断面図である。
【図8】図8は、図7に示す押圧の変化に対して表示部に表示される画面の変化の一例を示す図である。
【図9】図9は、図1に示す携帯電話の本体に備えられる制御部の例示的なハードウェアの構成図である。
【図10】図10は、メモリに格納されるデータであって、各櫛歯電極群の電圧値と表示体の速度との関係を示すデータの一例を説明する図である。
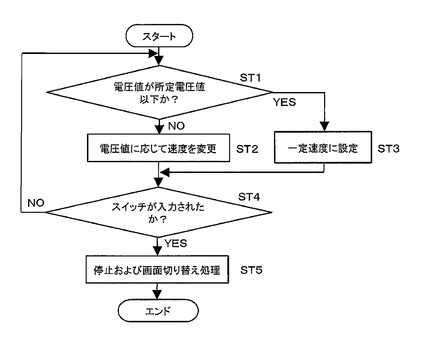
【図11】図11は、多方向キーの押圧の強さに応じて表示部における画面を変化させる処理の流れを示すフローチャートの一例である。
【発明を実施するための形態】
【0014】
以下に、本発明の多方向スイッチ部材およびそれを備える電子機器の実施の形態について、図面を参照しながら説明する。多方向スイッチ部材の実施の形態は、電子機器の実施の形態の中で説明する。なお、以下の各実施の形態では、電子機器として携帯電話を例に説明するが、電子機器は携帯電話に限定されず、他の種類の機器、例えば、車載用のナビゲーション装置、携帯用薄型PC、音楽再生用携帯機器、あるいはそれらの機器を操作するためのリモートコントローラなどでも良い。
【0015】
1.多方向スイッチ部材の構造
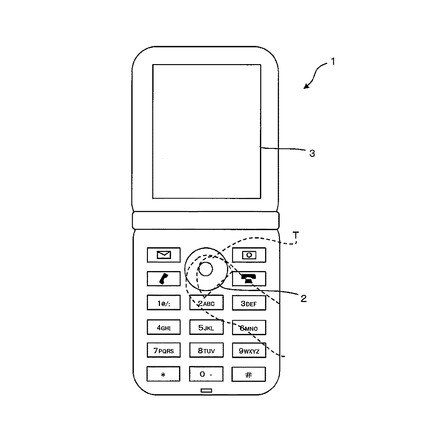
図1は、本発明の実施の形態に係る電子機器の一例である携帯電話の正面図である。
【0016】
図1に示すように、この実施の形態に係る電子機器の一例である携帯電話1は、その面内で多方向に操作可能な多方向スイッチ部材2と、表示部3とを備える。多方向スイッチ部材2は、上下左右の4方向(以後、「基準方向」と称する)と、2つの隣り合う基準方向の間にある方向(以後、「中間方向」と称する)とを含む合計8方向にそれぞれ押圧操作可能である。多方向スイッチ部材2は、略円形のスイッチ部材であり、その中心から8方向に押圧入力できるのみならず、中央部分を押圧入力できるものである。多方向スイッチ部材2の操作は、例えば、携帯電話1を持つ手の親指Tを使って好適に行われる。なお、多方向スイッチ部材2を、8方向に限定されず、4つの基準方向のみ、あるいは当該4つの基準方向に1以上の任意の数の中間方向を加えた複数方向に押圧入力可能なものとしても良い。
【0017】
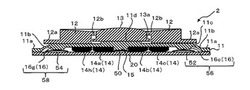
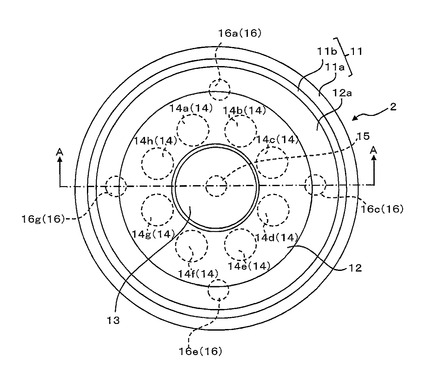
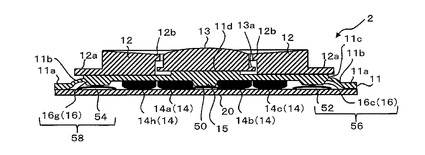
図2は、図1に示す多方向スイッチ部材を携帯電話から取り外して表方向から一部透過的に見た状態を示す図である。図3は、図2に示す多方向スイッチ部材のA−A線断面図である。
【0018】
図3に示すように、多方向スイッチ部材2は、薄型の略円板形状の弾性押圧部材11と、その裏側に配置される略円板形状の印刷回路基板(PCB)20とを備える。弾性押圧部材11は、好適には、熱可塑性エラストマー、熱硬化性エラストマー、天然ゴム等から構成され、特にシリコーンゴムからより好適に構成される。弾性押圧部材11は、径方向外側から内側に向かって、PCB20に固定される外周環状部11aと、表裏方向に弾性的に屈曲可能な屈曲ドーム11bと、その屈曲ドーム11bによってPCB20から非接触状態に支持される駆動板11cとを一体化した形態を有する。駆動板11cの表側の面の略中央部分には、表方向に突出する突出部11dを備える。PCB20は、好適には、ガラス繊維で編んだクロスにエポキシ樹脂を含浸させたガラスエポキシ製の回路基板である。ただし、PCB20として、カーボン繊維で編んだクロスにPET樹脂を含浸させた回路基板、ポリイミドフィルムを積層接着したポリイミド基板、ガラスコンポジット基板、あるいはアルミナ等から成るセラミックス基板を採用しても良い。弾性押圧部材11の突出部11dには、中央キー13が固定されている。中央キー13は、好適には、樹脂、金属あるいはガラスなどから構成することができる。中央キー13の天面は、緩やかに突出している。中央キー13の下端には、中央キー13の本体から径方向外側に突出する薄型のフランジ13aが形成されている。
【0019】
また、駆動板11cの突出部11dより外側には、リング形状の多方向キー12が固定されている。多方向キー12は、好適には、中央キー13と同様の材料から構成される。多方向キー12の上面は、その外周部から中央キー13の方向に緩やかに下方傾斜している。多方向キー12の下端には、多方向キー12の本体から径方向外側に突出する薄型のフランジ12aが形成されている。また、多方向キー12の上端には、多方向キー12の本体から径方向内側に突出する薄型の突出部12bが形成されている。中央キー13のフランジ13aおよび多方向キー12の突出部12bは、それぞれ、多方向キー12および中央キー13に非接触状態となっており、かつ表裏方向に一部重なる状態となっている。さらに、フランジ13aと突出部12bとの表裏方向には、多方向キー12を押し下げた際に、突出部12bがその押し下げた方向に移動可能な空間が形成されている。駆動板11cの裏面の略中央部分には、PCB20側に突出する1個の押圧子15が形成されている。また、当該裏面の外周近傍部分には、90度間隔で、PCB20側に突出する合計4個の押圧子16a,16c,16e,16g(図3では、押圧子16c,16gのみが見えている)が形成されている。以後、押圧子16a,16c,16e,16gを総称する場合には、押圧子16と称する。押圧子15,16は、例えば、樹脂あるいはゴム状弾性体から構成される。
【0020】
図2に示すように、駆動板11cの裏面であって押圧子15と押圧子16との間に挟まれる領域には、駆動板11cの中心から中心角略45度間隔に1個ずつ合計8個の導電性弾性体14a,14b,14c,14d,14e,14f,14g,14h(以後、総称する場合には、「導電性弾性体14」と称する)が固定されている。導電性弾性体14a,14b,14c,14d,14e,14f,14g,14hは、各押圧子16a,16c,16e,16gが周方向に隣り合う2個の導電性弾性体14の間に位置するように、配置されている。図3に示すように、導電性弾性体14は、略半球形状を有しており、その球面側先端がPCB20側を向くように、駆動板11cの裏面に固定されている。PCB20の表側の面には、押圧子15と対向する位置に1個のメタルドーム50、押圧子16a,16c,16e,16gとそれぞれ対向する位置に1個ずつの弾性変形可能なドームとしてのメタルドーム52,54等が配置されている。押圧子16とメタルドーム52,54等は、スイッチ56,58等の構成部の一部である。PCB20上の構成およびスイッチ56,58等の構成については後ほど詳述する。導電性弾性体14は、その先端位置が押圧子15,16の先端位置よりも低くなるような大きさで駆動板11cに固定されている。PCB20上において、導電性弾性体14が接する電極群(後述する)よりも、押圧子15,16が接するメタルドーム50,52,54等の方が高い位置にあるからである。
【0021】
導電性弾性体14は、PCB20上に接触後に弾性変形できるように、柔軟性に富む材料で構成されている。また、導電性弾性体14には、絶縁性の弾性体に導電性を付与するために、導電性材料が分散されている。導電性材料としては、カーボン、金属等を例示できるが、粒子径が小さいもの(ナノレベルの粒子)を容易に製造でき、かつその取り扱いが容易なカーボンブラックがより好ましい。また、導電性弾性体14を構成する母材としては、シリコーンゴム、ウレタン樹脂、熱可塑性エラストマー、天然ゴムを用いることができ、それらの中でも、シリコーンゴムが好ましい。導電性材料の混合量は、導電性を高めかつシリコーンゴムの弾性を維持する観点から、シリコーンゴムの材料と当該導電性材料の総重量に対して5〜50重量%であるのが好ましく、さらには、15〜35重量%がより好ましい。
【0022】
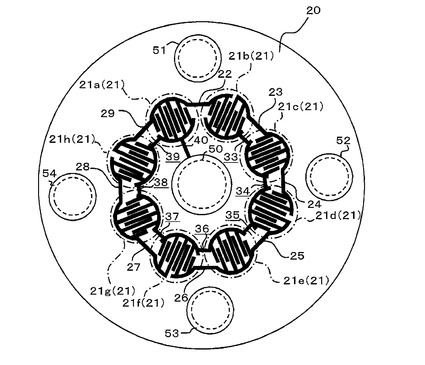
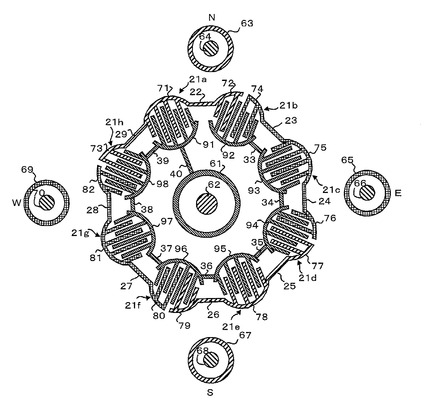
図4は、PCBの平面図である。また、図5は、図4に示すPCBからメタルドームを除いた状態を示す平面図である。
【0023】
図4に示すPCB20は、弾性押圧部材11の裏側に対向配置され、中央キー13および多方向キー12からの押圧を受けて押圧操作されたことを検知するためのものである。PCB20における各導電性弾性体14a,14b,14c,14d,14e,14f,14g,14hの裏側にそれぞれ対応する位置には、接点電極群の一例である櫛歯電極群21a,21b,21c,21d,21e,21f,21g,21h(総称する場合には、「櫛歯電極群21」と称する)が配置されている。櫛歯電極群21は、多数の歯を有する櫛形状の複数の電極を互いに接触しないように配置したものであり、4つの基準方向(ここでは、北、東、南、西の4つの方向とする)に配置される基準方向用接点電極群21a,21c,21e,21gと、当該基準方向の内の互いに隣り合う基準方向の間に位置する中間方向(ここでは、北東、南東、南西、北西の4つの方向とする)に配置される中間方向用接点電極群21b,21d,21f,21hとに分けられる。各櫛歯電極群21の上から各導電性弾性体14を押圧させて接触させると、その押圧に応じて各櫛歯電極群21と各導電性弾性体14との接触面積が大きくなり、その結果、各櫛歯電極群21を構成している電極間の電気抵抗が小さくなる。すなわち、各導電性弾性体14は、櫛歯電極群21を構成している電極間の電気抵抗を変えることができる可変抵抗機能を発揮する。
【0024】
図4に示すように、櫛歯電極群21aの外側と櫛歯電極群21bの外側、櫛歯電極群21bの外側と櫛歯電極群21cの外側、櫛歯電極群21cの外側と櫛歯電極群21dの外側、櫛歯電極群21dの外側と櫛歯電極群21eの外側、櫛歯電極群21eの外側と櫛歯電極群21fの外側、櫛歯電極群21fの外側と櫛歯電極群21gの外側、櫛歯電極群21gの外側と櫛歯電極群21hの外側および櫛歯電極群21hの外側と櫛歯電極群21aの外側は、それぞれ、配線22、配線23、配線24、配線25、配線26、配線27、配線28および配線29で接続されている。また、櫛歯電極群21bの内側と櫛歯電極群21cの内側、櫛歯電極群21cの内側と櫛歯電極群21dの内側、櫛歯電極群21dの内側と櫛歯電極群21eの内側、櫛歯電極群21eの内側と櫛歯電極群21fの内側、櫛歯電極群21fの内側と櫛歯電極群21gの内側、櫛歯電極群21gの内側と櫛歯電極群21hの内側および櫛歯電極群21hの内側と櫛歯電極群21aの内側は、それぞれ、配線33、配線34、配線35、配線36、配線37、配線38および配線39で接続されている。
【0025】
各櫛歯電極群21にて囲まれる領域の中央であって、押圧子15の下方に相当する位置には、1個のメタルドーム50が配置されている。前述のように、メタルドーム50の上面位置は、櫛歯電極群21のそれよりも高い。図5に示すように、メタルドーム50の外周端面は、PCB20上に形成された円環状のアース用の電極61と電気的に接続されている。また、アース用の電極61の内方には、円形の電極62が、アース用の電極61およびメタルドーム50のいずれにも接触しないように配置される。中央キー13をPCB20に向かって押圧すると、押圧子15が下方に押され、メタルドーム50をへこませることができ、その結果、メタルドーム50の中央部分が電極62に接触し、アース用の電極61と電極62とが電気的に接続される。なお、櫛歯電極群21aの内側は、アース用の電極61と、配線40にて接続されている。
【0026】
また、図4に示すように、PCB20上における櫛歯電極群21a,21c,21e,21gよりも外側であって、押圧子16a,16c,16e,16gの下方に相当する各位置には、それぞれ、1個のメタルドーム51,52,53,54が配置されている。図5に示すように、メタルドーム51,52,53,54の各外周端面は、PCB20上に形成された円環状の電極63,65,67,69とそれぞれ電気的に接続されている。その円環状の電極63,65,67,69の内方には、円形のアース用の電極64,66,68,70が、円環状の電極63,65,67,69および各メタルドーム51,52,53,54のいずれにも接触しないように配置されている。メタルドーム51、円環状の電極63、アース用の電極64および押圧子16aは、導電性弾性体14a,14bの接点電極群21a,21bへの接触よりも強い押圧により入力されるスイッチを構成する。メタルドーム52、円環状の電極65、アース用の電極66および押圧子16cは、導電性弾性体14c,14dの接点電極群21c,21dへの接触よりも強い押圧により入力されるスイッチ56を構成する。メタルドーム53、円環状の電極67、アース用の電極68および押圧子16eは、導電性弾性体14e,14fの接点電極群21e,21fへの接触よりも強い押圧により入力されるスイッチを構成する。また、メタルドーム54、円環状の電極69、アース用の電極70および押圧子16gは、導電性弾性体14g,14hの接点電極群21g,21hへの接触よりも強い押圧により入力されるスイッチ58を構成する。なお、上述のメタルドーム50,51,52,53,54に代えて、樹脂製のエンボススイッチ(例えば、PET製ドーム)、タクタイルスイッチ等の他種のメカニカルスイッチを用いても良い。加えて、メタルドーム50,51,52,53,54を、弾性押圧部材11側に設け、押圧子16をPCB20側に設けることもできる。
【0027】
図5に示すように、基準方向用接点電極群の一つである櫛歯電極群21aは、8個の櫛歯電極群21に囲まれる中心(電極62のある点)から見て外側(以後、単に「外側」と称する)にある櫛歯電極71と、電極62から見て内側(以後、単に「内側」と称する)にあるアース電極としての櫛歯電極91とから構成される。櫛歯電極71と櫛歯電極91は、歯を互い違いにかみ合うような配置で形成されている。中間方向用接点電極群の一つである櫛歯電極群21bは、その外側であって櫛歯電極群21aに近い側に配置される半櫛歯電極72と、同じく外側であって櫛歯電極群21cに近い側に配置される半櫛歯電極74と、半櫛歯電極72,74より内側に配置されるアース電極としての櫛歯電極92とから構成される。半櫛歯電極72等は、櫛歯電極71等の歯と垂直方向の長さを略半分にした大きさの電極である。他の半櫛歯電極74等も同様である。基準方向用接点電極群の一つである櫛歯電極群21cは、櫛歯電極群21aと同じ形態であり、外側にある櫛歯電極75と、内側にあるアース電極としての櫛歯電極93とから構成される。中間方向用接点電極群の一つである櫛歯電極群21dは、櫛歯電極群21bと同じ形態であり、その外側であって櫛歯電極群21cに近い側に配置される半櫛歯電極76と、同じく外側であって櫛歯電極群21eに近い側に配置される半櫛歯電極77と、半櫛歯電極76,77より内側に配置されるアース電極としての櫛歯電極94とから構成される。
【0028】
基準方向用接点電極群の一つである櫛歯電極群21eは、櫛歯電極群21aと同じ形態であり、外側にある櫛歯電極78と、内側にあるアース電極としての櫛歯電極95とから構成される。中間方向用接点電極群の一つである櫛歯電極群21fは、櫛歯電極群21bと同じ形態であり、その外側であって櫛歯電極群21eに近い側に配置される半櫛歯電極79と、同じく外側であって櫛歯電極群21gに近い側に配置される半櫛歯電極80と、半櫛歯電極79,80より内側に配置されるアース電極としての櫛歯電極96とから構成される。基準方向用接点電極群の一つである櫛歯電極群21gは、櫛歯電極群21aと同じ形態であり、外側にある櫛歯電極81と、内側にあるアース電極としての櫛歯電極97とから構成される。中間方向用接点電極群の一つである櫛歯電極群21hは、櫛歯電極群21bと同じ形態であり、その外側であって櫛歯電極群21gに近い側に配置される半櫛歯電極82と、同じく外側であって櫛歯電極群21aに近い側に配置される半櫛歯電極73と、半櫛歯電極82,73より内側に配置されるアース電極としての櫛歯電極98とから構成される。
【0029】
このように、基準方向用接点電極群である4つの櫛歯電極群21a,21c,21e,21gは、外側にある櫛歯電極と内側にある櫛歯電極とをかみ合わせた構成を有する一方、中間方向用接点電極群である4つの櫛歯電極群21b,21d,21f,21hは、外側にある2つの半櫛歯電極と、内側にある櫛歯電極とをかみ合わせた構成を有する。半櫛歯電極72,74,76,77,79,80,82,73の大きさは、櫛歯電極71,75,78,81,91,92,93,94,95,96,97,98を略半割にした大きさである。先に述べた配線22、配線23、配線24、配線25、配線26、配線27、配線28および配線29は、櫛歯電極71と半櫛歯電極72を、半櫛歯電極74と櫛歯電極75を、櫛歯電極75と半櫛歯電極76を、半櫛歯電極77と櫛歯電極78を、櫛歯電極78と半櫛歯電極79を、半櫛歯電極80と櫛歯電極81を、櫛歯電極81と半櫛歯電極82を、および半櫛歯電極73と櫛歯電極71を、それぞれ接続している。また、先に述べた配線33、配線34、配線35、配線36、配線37、配線38および配線39は、櫛歯電極92と櫛歯電極93を、櫛歯電極93と櫛歯電極94を、櫛歯電極94と櫛歯電極95を、櫛歯電極95と櫛歯電極96を、櫛歯電極96と櫛歯電極97を、櫛歯電極97と櫛歯電極98を、および櫛歯電極98と櫛歯電極91を、それぞれ接続している。
【0030】
半櫛歯電極73、櫛歯電極71、半櫛歯電極72および円環状の電極63は、北(N)方向の入力を検知するための電極である。半櫛歯電極74、櫛歯電極75、半櫛歯電極76および円環状の電極65は、東(E)方向の入力を検知するための電極である。半櫛歯電極77、櫛歯電極78、半櫛歯電極79および円環状の電極67は、南(S)方向の入力を検知するための電極である。半櫛歯電極80、櫛歯電極81、半櫛歯電極82および円環状の電極69は、西(W)方向の入力を検知するための電極である。すなわち、PCB20上の接点電極群21の内、中間方向用接点電極は、当該中間方向(北東、南東、南西、北西)の各方向の入力を検知するための電極ではなく、当該中間方向の両隣の基準方向の入力を検知するための電極から構成されている。
【0031】
1.2 操作方向の特定方法
図6は、多方向キー上の東方向のやや北東寄りの方向を押圧操作した際の各接点電極群への接触領域と、その際の操作方向の特定方法を説明するための図である。なお、図6では図の煩雑さを避けるため、円環状の電極63,65,67,69およびアース用の電極64,66,68,70は、示されていない。
【0032】
図6に示すように、多方向キー12上の東方向のやや北東寄りの方向をPCB20に向かって押圧操作した場合、導電性弾性体14b,14c,14d,14aが、それぞれNE、E、SEおよびNという4つの接触領域にてPCB20上の接点電極群に接触する。ここで、接触領域NE、E、SEおよびNの各接触面積の比は、10:10:8:2であるものとする。押圧操作の方向は、東方向のやや北東寄りの方向であるため、その方向から大きく外れた位置の接触領域Nは、他の接触領域NE、EおよびSEに比べて小さい。この例において、櫛歯電極75と櫛歯電極93との間の電圧値に対して付与されるポイントを10ポイントとすると、半櫛歯電極72,74と櫛歯電極92との間の電圧値に対して付与されるポイントも10ポイントである。半櫛歯電極76,77と櫛歯電極94との間の電圧値に対して付与されるポイントは8ポイントであり、櫛歯電極71と櫛歯電極91との間の電圧値に対して付与されるポイントは、2ポイントである。西方向では、櫛歯電極間(若しくは半櫛歯電極と櫛歯電極間)の電気抵抗値は無限大であり、ポイントは付与されない。この結果、表109に示すように、北方向に7ポイント、東方向に19ポイント、南方向に4ポイントがそれぞれ付与される。
【0033】
ここで、北と南は互いに反対方向である。このため、北方向に付与されたポイントと南方向のポイントの差し引きが行われる。一方、西方向のポイントはゼロであるが、実際の演算において、東方向のポイント(19ポイント)から西方向のポイント(ゼロポイント)を差し引くことになる。次に、北方向と南方向の各ポイントの差に相当する大きさの北方向のベクトルと、東方向のベクトルとを合成し、合成ベクトル112が生成される。この結果、押圧操作方向は、合成ベクトル112の方向、すなわち、東方向のやや北東寄りの方向と決定される。
【0034】
合成ベクトル112は、基準方向(北、東、南、西)および中間方向(北東、南東、南西、北西)のいずれの方向とも完全に一致しない方向である。上述のようなベクトルの演算処理を行うことにより、多方向スイッチ部材2において予め設定された8方向と一致しない任意の方向およびその強さを特定することができる。この利点の一つは、多方向キー12をその周方向に沿ってなぞる、いわゆる回転操作を行った際に、時々刻々と変化するベクトルの変化を細かく検知できることにある。
【0035】
その一方で、合成ベクトル112のように、8方向のいずれにも合致しない方向を持つベクトルが常に操作方向であると認識してしまうと、8方向のいずれかの方向のキーの機能を発揮しようとした場合に、不都合が生じる。このため、上述のような回転操作以外の場合には、合成ベクトル112が8方向のいずれの方向の範囲内にあるかを判別するようにするのが好ましい。例えば、多方向キー12を、中心角45度毎の8領域に分け、それぞれを、北、北東、東、南東、南、南西、西、北西の8方向に割り当てる。合成ベクトル112は、東方向の領域内に存在することになるので、東方向を操作方向と決定する。このように、多方向キー12上の複数方向を押圧した場合に生成される合成ベクトルがどの領域に存在するかによって操作方向を8方向のいずれかに決定すると、回転操作以外の操作を行う際に支障がなくなる。
【0036】
1.3 一方向の押圧を強めたときの状況および表示処理
図7は、多方向キーの面内の東方向を段階的に押圧したときの多方向スイッチ部材の状況を示す断面図である。図7では、図3に示す断面図の内、押圧する近傍のみを示している。また、図7(7B)および図7(7C)における一点鎖線は、図7(7A)に示す多方向キー12の位置を示す。
【0037】
多方向キー12の東方向をPCB20に向かって力F1にて軽く押圧すると、図7(7A)に示すように、その方向にある導電性弾性体14cを含むいくつかの導電性弾性体14が櫛歯電極群21cを含むいくつかの櫛歯電極群21に接触する。図7では、図の煩雑さを避けるため、複数の導電性弾性体14とこれと接触する複数の櫛歯電極群21を示さず、導電性弾性体14cとその直下の櫛歯電極群21cのみを示す。図7(7A)に示す状態において力F1から力F2に押圧を強めると、図7(7B)に示すように、櫛歯電極群21に接触している導電性弾性体14は、弾性的につぶれていき、櫛歯電極群21に接触する面積が大きくなる。その後、より強い力F3で押圧すると、図7(7C)に示すように、その方向の周辺にある1つの押圧子16がメタルドーム52をへこませる。その結果、メタルドーム52の中央部分がその直下にあるアース用の電極66に接触し、アース用の電極66と円環状の電極65とが電気的に接続される。また、メタルドーム52が押し込まれて、円環状の電極65がアース用の電極66と電気的に接続されると、導電性弾性体14cが接点電極群21cに接触しているときの機能と別の機能を発揮することができる。
【0038】
図8は、図7に示す押圧の変化に対して表示部に表示される画面の変化の一例を示す図である。
【0039】
例えば、表示部3に地図が表示されている状態で、多方向キー12の東方向を図7(7A)に示す力F1で押圧すると、図8(8A)に示すように、地図上に表示されているカーソル120の位置が矢印方向(すなわち、東方向)に移動する。その移動速度VSは、力F1に応じた速度である。これは、カーソル120の背景121がカーソル120の移動方向と逆方向(西方向)に移動するとしても同義である。この状態から、押圧を強めて力F2にすると、図8(8B)に示すように、地図上を移動するカーソル120の速度が力F2に応じた速度VLへと上昇する。さらに、押圧を強めて力F3とすると、メタルドーム52がへこみスイッチ56が入力され、カーソル120の移動表示の処理が終了し、図8(8C)に示すように、表示部3の画面が別の画面130に切り替わる。別の画面130は、カーソル120を移動している地図上の東方向にある都道府県と各都道府県内の区市町村を表示する画面である。ただし、別の画面130は、他の種類の画面、例えば、スイッチ56入力時のカーソル120の位置を拡大表示する画面であっても良い。
【0040】
1.4 制御部の概略構成
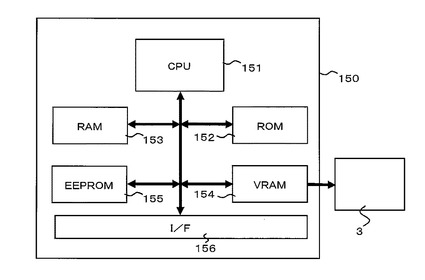
図9は、図1に示す携帯電話の本体に備えられる制御部の例示的なハードウェアの構成図である。
【0041】
制御部150は、中央処理装置(CPU)151と、読み出し専用のメモリ(ROM)152と、読み書き可能なメモリ(RAM)153と、ビデオRAM(VRAM)154と、電気若しくは電圧の操作でデータの消去若しくは書き換えを可能としたメモリ(EEPROM)155と、インターフェイス(I/F)156とを備える。制御部150は、多方向スイッチ部材2のPCB20上あるいはPCB20以外に設けることができる。
【0042】
ROM152は、CPU151の制御用プログラム等の読み出し専用の情報を格納したメモリである。RAM153は、オペレーションシステム(OS)、各種アプリケーションソフト、この実施の形態における押圧操作方向の決定の他、CPU151を、導電性弾性体14が接点電極群の一例である櫛歯電極群21に接触する面積の大きさに応じて、表示体の一例であるカーソル120若しくはその背景121の移動速度を変える速度変更手段と、メタルドーム51,52,53,54の押し込みによる入力に基づいて上記速度変更手段による処理を終了する処理終了手段として機能させるために必要なコンピュータプログラム等を格納した、読み書き可能なメモリである。
【0043】
コンピュータプログラムは、外部のネットワークを経由して携帯電話1にインストールし、あるいは情報記録媒体を携帯電話1内のスロット(図示せず)に装填し、その情報記録媒体に格納されたコンピュータプログラムを、制御部150内のRAM153若しくはEEPROM155に格納するようにしても良い。
【0044】
VRAM154は、種々のデータを表示部3に表示する際に、そのデータを一時的にストックしておくメモリである。EEPROM155も、一時的にデータを書き込んでおくメモリである。インターフェイス156は、制御部150の外部からの信号を受信あるいはその外部に信号を送信する部分である。ここで、「制御部150の外部」には、「携帯電話1の外部」も含まれる。
【0045】
CPU151は、導電性弾性体14が櫛歯電極群21に接触する面積の大きさに応じて、カーソル120のような表示体若しくは背景121の移動速度を変える速度変更手段と、メタルドーム51,52,53,54の押し込みによるスイッチ56,58等の入力に基づき速度変更手段による処理を終了する処理終了手段とを兼ねる。処理終了手段は、好適には、速度変更手段による処理を終了すると共に、別の画面の表示を行うこともできる。
【0046】
メモリであるROM152、RAM153およびEEPROM155の内の少なくとも1つには、各導電性弾性体14が各櫛歯電極群21と接触した際の櫛歯電極71等と櫛歯電極91等との間(若しくは半櫛歯電極72等と櫛歯電極92等との間)の電圧値に応じたポイントの値を記述したテーブル若しくは数式を格納することができる。ここで、「ポイント」は、電圧値と対応する数値の他、電気抵抗値あるいは電流値と対応する数値などを含むように広義に解釈される。また、ポイントは、図6の表109に例示した数値以外に、どのような数値でも採用できる。
【0047】
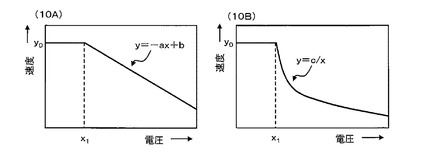
図10は、メモリに格納されるデータであって、各櫛歯電極群の電圧値と表示体の速度との関係を示すデータの一例を説明する図である。
【0048】
図10(10A)は、櫛歯電極群21を構成する2つの電極間の電圧値と表示体(カーソル120等)の速度とが直線関係にある場合の一例である。導電性弾性体14が櫛歯電極群21に接触する面積が大きくなるに伴い電圧値が小さくなると、それに比例して、表示体の速度が大きくなる。速度をy、電圧値をxとすると、「y=−ax+b」という一次式に基づき、速度が変化する。ここで、aは傾き(正数)を、bはy切片(正数)である。電圧値がある電圧値x1より小さくなると、速度は一定速度y0になる。ただし、一定速度y0になる電圧値の範囲を設定せず、全ての電圧値において、単に、y=−ax+bの直線式に基づいて速度を変えるようにしても良い。なお、直線式を、y=ax+bとし、押圧の強さに応じて表示体の速度が小さくなるようにしても良い。
【0049】
図10(10B)は、櫛歯電極群21を構成する2つの電極間の電圧値と表示体(カーソル120等)の速度とが曲線関係にある場合の一例である。導電性弾性体14が櫛歯電極群21に接触する面積が大きくなるに伴い電圧値が小さくなるに従い、表示体の速度が益々大きくなる。速度をy、電圧値をxとすると、「y=c/x」という反比例の式に基づき、速度が変化する。ここで、cは正数である。電圧値がある電圧値x1より小さくなると、速度は一定速度y0になる。ただし、一定速度y0になる電圧値の範囲を設定せず、全ての電圧値において、単に、y=c/xの式に基づいて速度を変えるようにしても良い。また、上記反比例の式で示す以外の曲線の式に基づき、押圧の強さに応じて表示体の速度が小さくなるようにしても良い。
【0050】
1.5 例示的な移動処理の流れ
図11は、多方向キーの押圧の強さに応じて表示部における画面を変化させる処理の流れを示すフローチャートの一例である。
【0051】
操作者が、多方向キー12の面内の一方向の端部をPCB20に向けて押圧して、その直下の櫛歯電極群21を構成する電極間に電流が流れ出すと、CPU151は、当該電極間の電圧値が所定電圧値(x1)以下であるかどうかを判別する(ステップST1)。当該電極間の電圧値が所定電圧値より大きい場合には、CPU151は、速度変更手段として、表示部3におけるカーソル120等の表示体の速度(例えば、移動速度)を、電圧値に応じて変更する(ステップST2)。一方、当該電極間の電圧値が所定電圧値以下の場合には、CPU151は、表示体の速度を一定速度(y0)に設定する(ステップST3)。続いて、CPU151は、処理終了手段として、メタルドーム51,52,53,54の押し込みによるスイッチ56,58等の入力が行われたかどうかを判別する(ステップST4)。その判別の結果、スイッチ56,58等の入力が行われていない場合には、ステップST1に戻り、ステップST1以降のステップを繰り返す。一方、スイッチ56,58等の入力が行われた場合には、CPU151は、処理終了手段として、速度変更手段の処理を終了し、別の画面への切り替えを行う(ステップST5)。
【0052】
なお、CPU151は、処理終了手段としてステップST4およびステップST5に至る各処理を行っているが、各処理を個別に行う手段に分けて、スイッチの入力が行われたかどうかを判別する入力判別手段と、スイッチの入力が行われると速度変更手段の処理を終了し、別の画面への切り替えを行う処理終了手段としても良い。また、ステップST5では、単に、速度変更手段による処理を終了するだけのステップでも良い。
【0053】
以上、本発明の好適な実施の形態について説明してきたが、本発明は、上述の実施の形態に限定されることなく、種々変形して実施することができる。
【0054】
例えば、多方向キー12の押し込む強さによりカーソル120の移動速度を変えているが、移動速度に限定されず、表示部3に表示される地図(表示体の一例)の拡大若しくは縮小する速度を大きく若しくは小さくしても良い。また、カーソル120やその背景121に限らず、操作者が操作する乗り物等のような他の表示体の速度を変更することができる。このように、速度変更手段の処理は、表示部3に表示されるいかなる表示体であっても、その速度を変える手段であれば良い。
【0055】
多方向キー12は、弾性押圧部材11の表側の面に貼り付けられる1個のリング状の部材であるが、多方向キーを2以上に分割されたキーとしても良い。弾性押圧部材11と多方向キー12を一体とする多方向キーを用いても良い。中央キー13は、必須の構成ではなく、その場合、多方向キーをリング形状ではなく、円板形状の部材としても良い。
【0056】
メタルドーム51,52,53,54は、PCB20上に4個設けられているが、いずれか1〜3つの方向あるいは5つ以上の方向にそれぞれ1つずつ設けても良い。また、メタルドーム51,52,53,54は、櫛歯電極群21よりもPCB20上の外側に設けられているが、櫛歯電極群21よりも内側に設けても良い。その場合、押圧子16の位置を上方向にし、あるいはメタルドーム51,52,53,54自体をへこみ難い形状あるいは材料で構成することにより、導電性弾性体14が櫛歯電極群21に接触後、その面積を大きくしてからメタルドーム51,52,53,54がへこむようにするのが好ましい。さらに、メタルドーム51,52,53,54を備えるスイッチ56,58等に代えて、導電性弾性体14のような導電材料と、櫛歯電極群21のような複数電極から構成される電極群からスイッチを構成しても良い。
【産業上の利用可能性】
【0057】
本発明は、電子機器、特に小型の電子機器に利用することができる。
【符号の説明】
【0058】
1 携帯電話(電子機器)
2 多方向スイッチ部材
3 表示部
12 多方向キー
13 中央キー
14a,14b,14c,14d,14e,14f,14g,14h,14 導電性弾性体
20 PCB(印刷回路基板)
21a,21b,21c,21d,21e,21f,21g,21h,21 櫛歯電極群(接点電極群)
51,52,53,54 メタルドーム(ドーム型スイッチあるいはその上位概念のスイッチの構成部)
56,58 スイッチ
120 カーソル(表示体の一例)
121 背景
130 別の画面
150 制御部
151 CPU(速度変更手段、処理終了手段)
152 ROM(メモリの一例)
153 RAM(メモリの一例)
155 EEPROM(メモリの一例)
【技術分野】
【0001】
本発明は、面内の複数方向において操作可能な多方向スイッチ部材およびそれを備える電子機器に関するものである。
【背景技術】
【0002】
携帯電話、カーナビゲーション装置、モバイルPC等の電子機器には、行き先を検索、設定、複数の経路を地図上に表示させるといったナビゲーション機能を持つソフトウェアをインストールし、それを実行できるものが多い。また、音楽再生装置のような電子機器の場合には、インターネットを介して外部サーバにアクセスし、あるいはCD−ROMのような情報記憶媒体から大量の音楽データを音楽再生装置内部のメモリに記憶し、その中から所望の音楽データを検索して再生することができるものがある。このような、検索、設定、表示といった機能を手軽に実行するため、上記のような電子機器として、少なくとも上下左右の複数方向に操作できる単一のコントローラを備えるものが知られている(特許文献1、特許文献2を参照)。
【0003】
例えば、ナビゲーション機能を持つソフトウェアを実行する際に、単一のコントローラの面内各方向に、各方向への移動機能が割り当てられることにより、例えば、右方向を押圧するとカーソルを右方向(あるいは地図画面を左方向)に、上方向を押圧するとカーソルを上方向(あるいは地図画面を下方向)に移動させることができる。また、音楽データの検索を行う際に、例えば、単一のコントローラの面内下方を押圧することにより、多くのミュージシャンのリスト表示をスクロールすることができ、所望のミュージシャンの位置で面内下方の押圧を終了した後、面内右方向を押圧することにより当該ミュージシャンの曲名を表示させることも可能である。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】米国特許第6,441,753号
【特許文献2】米国特許第7,348,967号
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上記従来の電子機器には、次のような問題がある。それは、多方向にて押圧可能なコントローラの各方向が単一の機能しか発揮できないことである。例えば、あるソフトウェアを実行している場合、コントローラの面内右方向を押圧したときには、右方向へのカーソルの移動、特定のメニューの表示等の単一の機能しか実行できない。ソフトウェアの機能が益々複雑になる中、このような不都合を低減するために、各方向の押圧順の組み合わせにより異なる機能を実行できるようにする方法も考えられる。しかし、各方向を多数操作するのは、操作者にとって煩わしく、かつそれを記憶するのも困難である。
【0006】
本発明は、上記のような問題に鑑みてなされたものであって、電子機器において、より簡単な操作にて多くの機能を実行することができるようにすることを目的とする。
【課題を解決するための手段】
【0007】
上記目的を解決するための本発明の一形態は、その面内にて多方向の操作を可能とする多方向スイッチ部材であって、その面内の多方向において表裏方向に押圧操作可能な1または2以上の多方向キーと、多方向キーからの押圧を検知するための印刷回路基板とを備え、多方向キーの裏方向の複数箇所に、印刷回路基板への押圧の強さにより接触面積を変える弾性変形可能な導電性弾性体をそれぞれ有し、印刷回路基板の表側において導電性弾性体と接触可能な位置には、導電性弾性体の接触により導通する複数の電極から構成される接点電極群をそれぞれ有し、多方向キーの面内の多方向の内の少なくとも一つの方向において、多方向キーの裏方向には、導電性弾性体の接点電極群への接触より強い押圧により入力されるスイッチを有する多方向スイッチ部材である。
【0008】
また、本発明の別の形態は、スイッチを、非接触状態の複数の電極と、その一部の電極と接続される弾性変形可能なドームとを有するドーム型のスイッチとする多方向スイッチ部材である。
【0009】
また、本発明の一形態は、上述の各多方向スイッチ部材を備える電子機器である。
【0010】
また、本発明の別の形態は、多方向スイッチ部材の操作に基づく処理を制御する制御部を備え、その制御部に、導電性弾性体が接点電極群に接触する面積の大きさに応じて、表示体若しくはその背景の移動速度あるいは当該表示体の拡大若しくは縮小速度を変える速度変更手段と、スイッチの入力により速度変更手段による処理を終了する処理終了手段とを備える電子機器である。
【0011】
また、本発明の別の形態は、処理終了手段を、速度変更手段による処理を終了すると共に、別の画面の表示を行う手段とする電子機器である。
【発明の効果】
【0012】
本発明によれば、電子機器において、より簡単な操作にて多くの機能を実行することができる。
【図面の簡単な説明】
【0013】
【図1】図1は、本発明の実施の形態に係る電子機器の一例である携帯電話の正面図である。
【図2】図2は、図1に示す多方向スイッチ部材を携帯電話から取り外して表方向から一部透過的に見た状態を示す図である。
【図3】図3は、図2に示す多方向スイッチ部材のA−A線断面図である。
【図4】図4は、PCBの平面図である。
【図5】図5は、図4に示すPCBからメタルドームを除いた状態を示す平面図である。
【図6】図6は、多方向キー上の東方向のやや北東寄りの方向を押圧操作した際の各接点電極群への接触領域と、その際の操作方向の特定方法を説明するための図である。
【図7】図7は、多方向キーの面内の東方向を段階的に押圧したときの多方向スイッチ部材の状況を示す断面図である。
【図8】図8は、図7に示す押圧の変化に対して表示部に表示される画面の変化の一例を示す図である。
【図9】図9は、図1に示す携帯電話の本体に備えられる制御部の例示的なハードウェアの構成図である。
【図10】図10は、メモリに格納されるデータであって、各櫛歯電極群の電圧値と表示体の速度との関係を示すデータの一例を説明する図である。
【図11】図11は、多方向キーの押圧の強さに応じて表示部における画面を変化させる処理の流れを示すフローチャートの一例である。
【発明を実施するための形態】
【0014】
以下に、本発明の多方向スイッチ部材およびそれを備える電子機器の実施の形態について、図面を参照しながら説明する。多方向スイッチ部材の実施の形態は、電子機器の実施の形態の中で説明する。なお、以下の各実施の形態では、電子機器として携帯電話を例に説明するが、電子機器は携帯電話に限定されず、他の種類の機器、例えば、車載用のナビゲーション装置、携帯用薄型PC、音楽再生用携帯機器、あるいはそれらの機器を操作するためのリモートコントローラなどでも良い。
【0015】
1.多方向スイッチ部材の構造
図1は、本発明の実施の形態に係る電子機器の一例である携帯電話の正面図である。
【0016】
図1に示すように、この実施の形態に係る電子機器の一例である携帯電話1は、その面内で多方向に操作可能な多方向スイッチ部材2と、表示部3とを備える。多方向スイッチ部材2は、上下左右の4方向(以後、「基準方向」と称する)と、2つの隣り合う基準方向の間にある方向(以後、「中間方向」と称する)とを含む合計8方向にそれぞれ押圧操作可能である。多方向スイッチ部材2は、略円形のスイッチ部材であり、その中心から8方向に押圧入力できるのみならず、中央部分を押圧入力できるものである。多方向スイッチ部材2の操作は、例えば、携帯電話1を持つ手の親指Tを使って好適に行われる。なお、多方向スイッチ部材2を、8方向に限定されず、4つの基準方向のみ、あるいは当該4つの基準方向に1以上の任意の数の中間方向を加えた複数方向に押圧入力可能なものとしても良い。
【0017】
図2は、図1に示す多方向スイッチ部材を携帯電話から取り外して表方向から一部透過的に見た状態を示す図である。図3は、図2に示す多方向スイッチ部材のA−A線断面図である。
【0018】
図3に示すように、多方向スイッチ部材2は、薄型の略円板形状の弾性押圧部材11と、その裏側に配置される略円板形状の印刷回路基板(PCB)20とを備える。弾性押圧部材11は、好適には、熱可塑性エラストマー、熱硬化性エラストマー、天然ゴム等から構成され、特にシリコーンゴムからより好適に構成される。弾性押圧部材11は、径方向外側から内側に向かって、PCB20に固定される外周環状部11aと、表裏方向に弾性的に屈曲可能な屈曲ドーム11bと、その屈曲ドーム11bによってPCB20から非接触状態に支持される駆動板11cとを一体化した形態を有する。駆動板11cの表側の面の略中央部分には、表方向に突出する突出部11dを備える。PCB20は、好適には、ガラス繊維で編んだクロスにエポキシ樹脂を含浸させたガラスエポキシ製の回路基板である。ただし、PCB20として、カーボン繊維で編んだクロスにPET樹脂を含浸させた回路基板、ポリイミドフィルムを積層接着したポリイミド基板、ガラスコンポジット基板、あるいはアルミナ等から成るセラミックス基板を採用しても良い。弾性押圧部材11の突出部11dには、中央キー13が固定されている。中央キー13は、好適には、樹脂、金属あるいはガラスなどから構成することができる。中央キー13の天面は、緩やかに突出している。中央キー13の下端には、中央キー13の本体から径方向外側に突出する薄型のフランジ13aが形成されている。
【0019】
また、駆動板11cの突出部11dより外側には、リング形状の多方向キー12が固定されている。多方向キー12は、好適には、中央キー13と同様の材料から構成される。多方向キー12の上面は、その外周部から中央キー13の方向に緩やかに下方傾斜している。多方向キー12の下端には、多方向キー12の本体から径方向外側に突出する薄型のフランジ12aが形成されている。また、多方向キー12の上端には、多方向キー12の本体から径方向内側に突出する薄型の突出部12bが形成されている。中央キー13のフランジ13aおよび多方向キー12の突出部12bは、それぞれ、多方向キー12および中央キー13に非接触状態となっており、かつ表裏方向に一部重なる状態となっている。さらに、フランジ13aと突出部12bとの表裏方向には、多方向キー12を押し下げた際に、突出部12bがその押し下げた方向に移動可能な空間が形成されている。駆動板11cの裏面の略中央部分には、PCB20側に突出する1個の押圧子15が形成されている。また、当該裏面の外周近傍部分には、90度間隔で、PCB20側に突出する合計4個の押圧子16a,16c,16e,16g(図3では、押圧子16c,16gのみが見えている)が形成されている。以後、押圧子16a,16c,16e,16gを総称する場合には、押圧子16と称する。押圧子15,16は、例えば、樹脂あるいはゴム状弾性体から構成される。
【0020】
図2に示すように、駆動板11cの裏面であって押圧子15と押圧子16との間に挟まれる領域には、駆動板11cの中心から中心角略45度間隔に1個ずつ合計8個の導電性弾性体14a,14b,14c,14d,14e,14f,14g,14h(以後、総称する場合には、「導電性弾性体14」と称する)が固定されている。導電性弾性体14a,14b,14c,14d,14e,14f,14g,14hは、各押圧子16a,16c,16e,16gが周方向に隣り合う2個の導電性弾性体14の間に位置するように、配置されている。図3に示すように、導電性弾性体14は、略半球形状を有しており、その球面側先端がPCB20側を向くように、駆動板11cの裏面に固定されている。PCB20の表側の面には、押圧子15と対向する位置に1個のメタルドーム50、押圧子16a,16c,16e,16gとそれぞれ対向する位置に1個ずつの弾性変形可能なドームとしてのメタルドーム52,54等が配置されている。押圧子16とメタルドーム52,54等は、スイッチ56,58等の構成部の一部である。PCB20上の構成およびスイッチ56,58等の構成については後ほど詳述する。導電性弾性体14は、その先端位置が押圧子15,16の先端位置よりも低くなるような大きさで駆動板11cに固定されている。PCB20上において、導電性弾性体14が接する電極群(後述する)よりも、押圧子15,16が接するメタルドーム50,52,54等の方が高い位置にあるからである。
【0021】
導電性弾性体14は、PCB20上に接触後に弾性変形できるように、柔軟性に富む材料で構成されている。また、導電性弾性体14には、絶縁性の弾性体に導電性を付与するために、導電性材料が分散されている。導電性材料としては、カーボン、金属等を例示できるが、粒子径が小さいもの(ナノレベルの粒子)を容易に製造でき、かつその取り扱いが容易なカーボンブラックがより好ましい。また、導電性弾性体14を構成する母材としては、シリコーンゴム、ウレタン樹脂、熱可塑性エラストマー、天然ゴムを用いることができ、それらの中でも、シリコーンゴムが好ましい。導電性材料の混合量は、導電性を高めかつシリコーンゴムの弾性を維持する観点から、シリコーンゴムの材料と当該導電性材料の総重量に対して5〜50重量%であるのが好ましく、さらには、15〜35重量%がより好ましい。
【0022】
図4は、PCBの平面図である。また、図5は、図4に示すPCBからメタルドームを除いた状態を示す平面図である。
【0023】
図4に示すPCB20は、弾性押圧部材11の裏側に対向配置され、中央キー13および多方向キー12からの押圧を受けて押圧操作されたことを検知するためのものである。PCB20における各導電性弾性体14a,14b,14c,14d,14e,14f,14g,14hの裏側にそれぞれ対応する位置には、接点電極群の一例である櫛歯電極群21a,21b,21c,21d,21e,21f,21g,21h(総称する場合には、「櫛歯電極群21」と称する)が配置されている。櫛歯電極群21は、多数の歯を有する櫛形状の複数の電極を互いに接触しないように配置したものであり、4つの基準方向(ここでは、北、東、南、西の4つの方向とする)に配置される基準方向用接点電極群21a,21c,21e,21gと、当該基準方向の内の互いに隣り合う基準方向の間に位置する中間方向(ここでは、北東、南東、南西、北西の4つの方向とする)に配置される中間方向用接点電極群21b,21d,21f,21hとに分けられる。各櫛歯電極群21の上から各導電性弾性体14を押圧させて接触させると、その押圧に応じて各櫛歯電極群21と各導電性弾性体14との接触面積が大きくなり、その結果、各櫛歯電極群21を構成している電極間の電気抵抗が小さくなる。すなわち、各導電性弾性体14は、櫛歯電極群21を構成している電極間の電気抵抗を変えることができる可変抵抗機能を発揮する。
【0024】
図4に示すように、櫛歯電極群21aの外側と櫛歯電極群21bの外側、櫛歯電極群21bの外側と櫛歯電極群21cの外側、櫛歯電極群21cの外側と櫛歯電極群21dの外側、櫛歯電極群21dの外側と櫛歯電極群21eの外側、櫛歯電極群21eの外側と櫛歯電極群21fの外側、櫛歯電極群21fの外側と櫛歯電極群21gの外側、櫛歯電極群21gの外側と櫛歯電極群21hの外側および櫛歯電極群21hの外側と櫛歯電極群21aの外側は、それぞれ、配線22、配線23、配線24、配線25、配線26、配線27、配線28および配線29で接続されている。また、櫛歯電極群21bの内側と櫛歯電極群21cの内側、櫛歯電極群21cの内側と櫛歯電極群21dの内側、櫛歯電極群21dの内側と櫛歯電極群21eの内側、櫛歯電極群21eの内側と櫛歯電極群21fの内側、櫛歯電極群21fの内側と櫛歯電極群21gの内側、櫛歯電極群21gの内側と櫛歯電極群21hの内側および櫛歯電極群21hの内側と櫛歯電極群21aの内側は、それぞれ、配線33、配線34、配線35、配線36、配線37、配線38および配線39で接続されている。
【0025】
各櫛歯電極群21にて囲まれる領域の中央であって、押圧子15の下方に相当する位置には、1個のメタルドーム50が配置されている。前述のように、メタルドーム50の上面位置は、櫛歯電極群21のそれよりも高い。図5に示すように、メタルドーム50の外周端面は、PCB20上に形成された円環状のアース用の電極61と電気的に接続されている。また、アース用の電極61の内方には、円形の電極62が、アース用の電極61およびメタルドーム50のいずれにも接触しないように配置される。中央キー13をPCB20に向かって押圧すると、押圧子15が下方に押され、メタルドーム50をへこませることができ、その結果、メタルドーム50の中央部分が電極62に接触し、アース用の電極61と電極62とが電気的に接続される。なお、櫛歯電極群21aの内側は、アース用の電極61と、配線40にて接続されている。
【0026】
また、図4に示すように、PCB20上における櫛歯電極群21a,21c,21e,21gよりも外側であって、押圧子16a,16c,16e,16gの下方に相当する各位置には、それぞれ、1個のメタルドーム51,52,53,54が配置されている。図5に示すように、メタルドーム51,52,53,54の各外周端面は、PCB20上に形成された円環状の電極63,65,67,69とそれぞれ電気的に接続されている。その円環状の電極63,65,67,69の内方には、円形のアース用の電極64,66,68,70が、円環状の電極63,65,67,69および各メタルドーム51,52,53,54のいずれにも接触しないように配置されている。メタルドーム51、円環状の電極63、アース用の電極64および押圧子16aは、導電性弾性体14a,14bの接点電極群21a,21bへの接触よりも強い押圧により入力されるスイッチを構成する。メタルドーム52、円環状の電極65、アース用の電極66および押圧子16cは、導電性弾性体14c,14dの接点電極群21c,21dへの接触よりも強い押圧により入力されるスイッチ56を構成する。メタルドーム53、円環状の電極67、アース用の電極68および押圧子16eは、導電性弾性体14e,14fの接点電極群21e,21fへの接触よりも強い押圧により入力されるスイッチを構成する。また、メタルドーム54、円環状の電極69、アース用の電極70および押圧子16gは、導電性弾性体14g,14hの接点電極群21g,21hへの接触よりも強い押圧により入力されるスイッチ58を構成する。なお、上述のメタルドーム50,51,52,53,54に代えて、樹脂製のエンボススイッチ(例えば、PET製ドーム)、タクタイルスイッチ等の他種のメカニカルスイッチを用いても良い。加えて、メタルドーム50,51,52,53,54を、弾性押圧部材11側に設け、押圧子16をPCB20側に設けることもできる。
【0027】
図5に示すように、基準方向用接点電極群の一つである櫛歯電極群21aは、8個の櫛歯電極群21に囲まれる中心(電極62のある点)から見て外側(以後、単に「外側」と称する)にある櫛歯電極71と、電極62から見て内側(以後、単に「内側」と称する)にあるアース電極としての櫛歯電極91とから構成される。櫛歯電極71と櫛歯電極91は、歯を互い違いにかみ合うような配置で形成されている。中間方向用接点電極群の一つである櫛歯電極群21bは、その外側であって櫛歯電極群21aに近い側に配置される半櫛歯電極72と、同じく外側であって櫛歯電極群21cに近い側に配置される半櫛歯電極74と、半櫛歯電極72,74より内側に配置されるアース電極としての櫛歯電極92とから構成される。半櫛歯電極72等は、櫛歯電極71等の歯と垂直方向の長さを略半分にした大きさの電極である。他の半櫛歯電極74等も同様である。基準方向用接点電極群の一つである櫛歯電極群21cは、櫛歯電極群21aと同じ形態であり、外側にある櫛歯電極75と、内側にあるアース電極としての櫛歯電極93とから構成される。中間方向用接点電極群の一つである櫛歯電極群21dは、櫛歯電極群21bと同じ形態であり、その外側であって櫛歯電極群21cに近い側に配置される半櫛歯電極76と、同じく外側であって櫛歯電極群21eに近い側に配置される半櫛歯電極77と、半櫛歯電極76,77より内側に配置されるアース電極としての櫛歯電極94とから構成される。
【0028】
基準方向用接点電極群の一つである櫛歯電極群21eは、櫛歯電極群21aと同じ形態であり、外側にある櫛歯電極78と、内側にあるアース電極としての櫛歯電極95とから構成される。中間方向用接点電極群の一つである櫛歯電極群21fは、櫛歯電極群21bと同じ形態であり、その外側であって櫛歯電極群21eに近い側に配置される半櫛歯電極79と、同じく外側であって櫛歯電極群21gに近い側に配置される半櫛歯電極80と、半櫛歯電極79,80より内側に配置されるアース電極としての櫛歯電極96とから構成される。基準方向用接点電極群の一つである櫛歯電極群21gは、櫛歯電極群21aと同じ形態であり、外側にある櫛歯電極81と、内側にあるアース電極としての櫛歯電極97とから構成される。中間方向用接点電極群の一つである櫛歯電極群21hは、櫛歯電極群21bと同じ形態であり、その外側であって櫛歯電極群21gに近い側に配置される半櫛歯電極82と、同じく外側であって櫛歯電極群21aに近い側に配置される半櫛歯電極73と、半櫛歯電極82,73より内側に配置されるアース電極としての櫛歯電極98とから構成される。
【0029】
このように、基準方向用接点電極群である4つの櫛歯電極群21a,21c,21e,21gは、外側にある櫛歯電極と内側にある櫛歯電極とをかみ合わせた構成を有する一方、中間方向用接点電極群である4つの櫛歯電極群21b,21d,21f,21hは、外側にある2つの半櫛歯電極と、内側にある櫛歯電極とをかみ合わせた構成を有する。半櫛歯電極72,74,76,77,79,80,82,73の大きさは、櫛歯電極71,75,78,81,91,92,93,94,95,96,97,98を略半割にした大きさである。先に述べた配線22、配線23、配線24、配線25、配線26、配線27、配線28および配線29は、櫛歯電極71と半櫛歯電極72を、半櫛歯電極74と櫛歯電極75を、櫛歯電極75と半櫛歯電極76を、半櫛歯電極77と櫛歯電極78を、櫛歯電極78と半櫛歯電極79を、半櫛歯電極80と櫛歯電極81を、櫛歯電極81と半櫛歯電極82を、および半櫛歯電極73と櫛歯電極71を、それぞれ接続している。また、先に述べた配線33、配線34、配線35、配線36、配線37、配線38および配線39は、櫛歯電極92と櫛歯電極93を、櫛歯電極93と櫛歯電極94を、櫛歯電極94と櫛歯電極95を、櫛歯電極95と櫛歯電極96を、櫛歯電極96と櫛歯電極97を、櫛歯電極97と櫛歯電極98を、および櫛歯電極98と櫛歯電極91を、それぞれ接続している。
【0030】
半櫛歯電極73、櫛歯電極71、半櫛歯電極72および円環状の電極63は、北(N)方向の入力を検知するための電極である。半櫛歯電極74、櫛歯電極75、半櫛歯電極76および円環状の電極65は、東(E)方向の入力を検知するための電極である。半櫛歯電極77、櫛歯電極78、半櫛歯電極79および円環状の電極67は、南(S)方向の入力を検知するための電極である。半櫛歯電極80、櫛歯電極81、半櫛歯電極82および円環状の電極69は、西(W)方向の入力を検知するための電極である。すなわち、PCB20上の接点電極群21の内、中間方向用接点電極は、当該中間方向(北東、南東、南西、北西)の各方向の入力を検知するための電極ではなく、当該中間方向の両隣の基準方向の入力を検知するための電極から構成されている。
【0031】
1.2 操作方向の特定方法
図6は、多方向キー上の東方向のやや北東寄りの方向を押圧操作した際の各接点電極群への接触領域と、その際の操作方向の特定方法を説明するための図である。なお、図6では図の煩雑さを避けるため、円環状の電極63,65,67,69およびアース用の電極64,66,68,70は、示されていない。
【0032】
図6に示すように、多方向キー12上の東方向のやや北東寄りの方向をPCB20に向かって押圧操作した場合、導電性弾性体14b,14c,14d,14aが、それぞれNE、E、SEおよびNという4つの接触領域にてPCB20上の接点電極群に接触する。ここで、接触領域NE、E、SEおよびNの各接触面積の比は、10:10:8:2であるものとする。押圧操作の方向は、東方向のやや北東寄りの方向であるため、その方向から大きく外れた位置の接触領域Nは、他の接触領域NE、EおよびSEに比べて小さい。この例において、櫛歯電極75と櫛歯電極93との間の電圧値に対して付与されるポイントを10ポイントとすると、半櫛歯電極72,74と櫛歯電極92との間の電圧値に対して付与されるポイントも10ポイントである。半櫛歯電極76,77と櫛歯電極94との間の電圧値に対して付与されるポイントは8ポイントであり、櫛歯電極71と櫛歯電極91との間の電圧値に対して付与されるポイントは、2ポイントである。西方向では、櫛歯電極間(若しくは半櫛歯電極と櫛歯電極間)の電気抵抗値は無限大であり、ポイントは付与されない。この結果、表109に示すように、北方向に7ポイント、東方向に19ポイント、南方向に4ポイントがそれぞれ付与される。
【0033】
ここで、北と南は互いに反対方向である。このため、北方向に付与されたポイントと南方向のポイントの差し引きが行われる。一方、西方向のポイントはゼロであるが、実際の演算において、東方向のポイント(19ポイント)から西方向のポイント(ゼロポイント)を差し引くことになる。次に、北方向と南方向の各ポイントの差に相当する大きさの北方向のベクトルと、東方向のベクトルとを合成し、合成ベクトル112が生成される。この結果、押圧操作方向は、合成ベクトル112の方向、すなわち、東方向のやや北東寄りの方向と決定される。
【0034】
合成ベクトル112は、基準方向(北、東、南、西)および中間方向(北東、南東、南西、北西)のいずれの方向とも完全に一致しない方向である。上述のようなベクトルの演算処理を行うことにより、多方向スイッチ部材2において予め設定された8方向と一致しない任意の方向およびその強さを特定することができる。この利点の一つは、多方向キー12をその周方向に沿ってなぞる、いわゆる回転操作を行った際に、時々刻々と変化するベクトルの変化を細かく検知できることにある。
【0035】
その一方で、合成ベクトル112のように、8方向のいずれにも合致しない方向を持つベクトルが常に操作方向であると認識してしまうと、8方向のいずれかの方向のキーの機能を発揮しようとした場合に、不都合が生じる。このため、上述のような回転操作以外の場合には、合成ベクトル112が8方向のいずれの方向の範囲内にあるかを判別するようにするのが好ましい。例えば、多方向キー12を、中心角45度毎の8領域に分け、それぞれを、北、北東、東、南東、南、南西、西、北西の8方向に割り当てる。合成ベクトル112は、東方向の領域内に存在することになるので、東方向を操作方向と決定する。このように、多方向キー12上の複数方向を押圧した場合に生成される合成ベクトルがどの領域に存在するかによって操作方向を8方向のいずれかに決定すると、回転操作以外の操作を行う際に支障がなくなる。
【0036】
1.3 一方向の押圧を強めたときの状況および表示処理
図7は、多方向キーの面内の東方向を段階的に押圧したときの多方向スイッチ部材の状況を示す断面図である。図7では、図3に示す断面図の内、押圧する近傍のみを示している。また、図7(7B)および図7(7C)における一点鎖線は、図7(7A)に示す多方向キー12の位置を示す。
【0037】
多方向キー12の東方向をPCB20に向かって力F1にて軽く押圧すると、図7(7A)に示すように、その方向にある導電性弾性体14cを含むいくつかの導電性弾性体14が櫛歯電極群21cを含むいくつかの櫛歯電極群21に接触する。図7では、図の煩雑さを避けるため、複数の導電性弾性体14とこれと接触する複数の櫛歯電極群21を示さず、導電性弾性体14cとその直下の櫛歯電極群21cのみを示す。図7(7A)に示す状態において力F1から力F2に押圧を強めると、図7(7B)に示すように、櫛歯電極群21に接触している導電性弾性体14は、弾性的につぶれていき、櫛歯電極群21に接触する面積が大きくなる。その後、より強い力F3で押圧すると、図7(7C)に示すように、その方向の周辺にある1つの押圧子16がメタルドーム52をへこませる。その結果、メタルドーム52の中央部分がその直下にあるアース用の電極66に接触し、アース用の電極66と円環状の電極65とが電気的に接続される。また、メタルドーム52が押し込まれて、円環状の電極65がアース用の電極66と電気的に接続されると、導電性弾性体14cが接点電極群21cに接触しているときの機能と別の機能を発揮することができる。
【0038】
図8は、図7に示す押圧の変化に対して表示部に表示される画面の変化の一例を示す図である。
【0039】
例えば、表示部3に地図が表示されている状態で、多方向キー12の東方向を図7(7A)に示す力F1で押圧すると、図8(8A)に示すように、地図上に表示されているカーソル120の位置が矢印方向(すなわち、東方向)に移動する。その移動速度VSは、力F1に応じた速度である。これは、カーソル120の背景121がカーソル120の移動方向と逆方向(西方向)に移動するとしても同義である。この状態から、押圧を強めて力F2にすると、図8(8B)に示すように、地図上を移動するカーソル120の速度が力F2に応じた速度VLへと上昇する。さらに、押圧を強めて力F3とすると、メタルドーム52がへこみスイッチ56が入力され、カーソル120の移動表示の処理が終了し、図8(8C)に示すように、表示部3の画面が別の画面130に切り替わる。別の画面130は、カーソル120を移動している地図上の東方向にある都道府県と各都道府県内の区市町村を表示する画面である。ただし、別の画面130は、他の種類の画面、例えば、スイッチ56入力時のカーソル120の位置を拡大表示する画面であっても良い。
【0040】
1.4 制御部の概略構成
図9は、図1に示す携帯電話の本体に備えられる制御部の例示的なハードウェアの構成図である。
【0041】
制御部150は、中央処理装置(CPU)151と、読み出し専用のメモリ(ROM)152と、読み書き可能なメモリ(RAM)153と、ビデオRAM(VRAM)154と、電気若しくは電圧の操作でデータの消去若しくは書き換えを可能としたメモリ(EEPROM)155と、インターフェイス(I/F)156とを備える。制御部150は、多方向スイッチ部材2のPCB20上あるいはPCB20以外に設けることができる。
【0042】
ROM152は、CPU151の制御用プログラム等の読み出し専用の情報を格納したメモリである。RAM153は、オペレーションシステム(OS)、各種アプリケーションソフト、この実施の形態における押圧操作方向の決定の他、CPU151を、導電性弾性体14が接点電極群の一例である櫛歯電極群21に接触する面積の大きさに応じて、表示体の一例であるカーソル120若しくはその背景121の移動速度を変える速度変更手段と、メタルドーム51,52,53,54の押し込みによる入力に基づいて上記速度変更手段による処理を終了する処理終了手段として機能させるために必要なコンピュータプログラム等を格納した、読み書き可能なメモリである。
【0043】
コンピュータプログラムは、外部のネットワークを経由して携帯電話1にインストールし、あるいは情報記録媒体を携帯電話1内のスロット(図示せず)に装填し、その情報記録媒体に格納されたコンピュータプログラムを、制御部150内のRAM153若しくはEEPROM155に格納するようにしても良い。
【0044】
VRAM154は、種々のデータを表示部3に表示する際に、そのデータを一時的にストックしておくメモリである。EEPROM155も、一時的にデータを書き込んでおくメモリである。インターフェイス156は、制御部150の外部からの信号を受信あるいはその外部に信号を送信する部分である。ここで、「制御部150の外部」には、「携帯電話1の外部」も含まれる。
【0045】
CPU151は、導電性弾性体14が櫛歯電極群21に接触する面積の大きさに応じて、カーソル120のような表示体若しくは背景121の移動速度を変える速度変更手段と、メタルドーム51,52,53,54の押し込みによるスイッチ56,58等の入力に基づき速度変更手段による処理を終了する処理終了手段とを兼ねる。処理終了手段は、好適には、速度変更手段による処理を終了すると共に、別の画面の表示を行うこともできる。
【0046】
メモリであるROM152、RAM153およびEEPROM155の内の少なくとも1つには、各導電性弾性体14が各櫛歯電極群21と接触した際の櫛歯電極71等と櫛歯電極91等との間(若しくは半櫛歯電極72等と櫛歯電極92等との間)の電圧値に応じたポイントの値を記述したテーブル若しくは数式を格納することができる。ここで、「ポイント」は、電圧値と対応する数値の他、電気抵抗値あるいは電流値と対応する数値などを含むように広義に解釈される。また、ポイントは、図6の表109に例示した数値以外に、どのような数値でも採用できる。
【0047】
図10は、メモリに格納されるデータであって、各櫛歯電極群の電圧値と表示体の速度との関係を示すデータの一例を説明する図である。
【0048】
図10(10A)は、櫛歯電極群21を構成する2つの電極間の電圧値と表示体(カーソル120等)の速度とが直線関係にある場合の一例である。導電性弾性体14が櫛歯電極群21に接触する面積が大きくなるに伴い電圧値が小さくなると、それに比例して、表示体の速度が大きくなる。速度をy、電圧値をxとすると、「y=−ax+b」という一次式に基づき、速度が変化する。ここで、aは傾き(正数)を、bはy切片(正数)である。電圧値がある電圧値x1より小さくなると、速度は一定速度y0になる。ただし、一定速度y0になる電圧値の範囲を設定せず、全ての電圧値において、単に、y=−ax+bの直線式に基づいて速度を変えるようにしても良い。なお、直線式を、y=ax+bとし、押圧の強さに応じて表示体の速度が小さくなるようにしても良い。
【0049】
図10(10B)は、櫛歯電極群21を構成する2つの電極間の電圧値と表示体(カーソル120等)の速度とが曲線関係にある場合の一例である。導電性弾性体14が櫛歯電極群21に接触する面積が大きくなるに伴い電圧値が小さくなるに従い、表示体の速度が益々大きくなる。速度をy、電圧値をxとすると、「y=c/x」という反比例の式に基づき、速度が変化する。ここで、cは正数である。電圧値がある電圧値x1より小さくなると、速度は一定速度y0になる。ただし、一定速度y0になる電圧値の範囲を設定せず、全ての電圧値において、単に、y=c/xの式に基づいて速度を変えるようにしても良い。また、上記反比例の式で示す以外の曲線の式に基づき、押圧の強さに応じて表示体の速度が小さくなるようにしても良い。
【0050】
1.5 例示的な移動処理の流れ
図11は、多方向キーの押圧の強さに応じて表示部における画面を変化させる処理の流れを示すフローチャートの一例である。
【0051】
操作者が、多方向キー12の面内の一方向の端部をPCB20に向けて押圧して、その直下の櫛歯電極群21を構成する電極間に電流が流れ出すと、CPU151は、当該電極間の電圧値が所定電圧値(x1)以下であるかどうかを判別する(ステップST1)。当該電極間の電圧値が所定電圧値より大きい場合には、CPU151は、速度変更手段として、表示部3におけるカーソル120等の表示体の速度(例えば、移動速度)を、電圧値に応じて変更する(ステップST2)。一方、当該電極間の電圧値が所定電圧値以下の場合には、CPU151は、表示体の速度を一定速度(y0)に設定する(ステップST3)。続いて、CPU151は、処理終了手段として、メタルドーム51,52,53,54の押し込みによるスイッチ56,58等の入力が行われたかどうかを判別する(ステップST4)。その判別の結果、スイッチ56,58等の入力が行われていない場合には、ステップST1に戻り、ステップST1以降のステップを繰り返す。一方、スイッチ56,58等の入力が行われた場合には、CPU151は、処理終了手段として、速度変更手段の処理を終了し、別の画面への切り替えを行う(ステップST5)。
【0052】
なお、CPU151は、処理終了手段としてステップST4およびステップST5に至る各処理を行っているが、各処理を個別に行う手段に分けて、スイッチの入力が行われたかどうかを判別する入力判別手段と、スイッチの入力が行われると速度変更手段の処理を終了し、別の画面への切り替えを行う処理終了手段としても良い。また、ステップST5では、単に、速度変更手段による処理を終了するだけのステップでも良い。
【0053】
以上、本発明の好適な実施の形態について説明してきたが、本発明は、上述の実施の形態に限定されることなく、種々変形して実施することができる。
【0054】
例えば、多方向キー12の押し込む強さによりカーソル120の移動速度を変えているが、移動速度に限定されず、表示部3に表示される地図(表示体の一例)の拡大若しくは縮小する速度を大きく若しくは小さくしても良い。また、カーソル120やその背景121に限らず、操作者が操作する乗り物等のような他の表示体の速度を変更することができる。このように、速度変更手段の処理は、表示部3に表示されるいかなる表示体であっても、その速度を変える手段であれば良い。
【0055】
多方向キー12は、弾性押圧部材11の表側の面に貼り付けられる1個のリング状の部材であるが、多方向キーを2以上に分割されたキーとしても良い。弾性押圧部材11と多方向キー12を一体とする多方向キーを用いても良い。中央キー13は、必須の構成ではなく、その場合、多方向キーをリング形状ではなく、円板形状の部材としても良い。
【0056】
メタルドーム51,52,53,54は、PCB20上に4個設けられているが、いずれか1〜3つの方向あるいは5つ以上の方向にそれぞれ1つずつ設けても良い。また、メタルドーム51,52,53,54は、櫛歯電極群21よりもPCB20上の外側に設けられているが、櫛歯電極群21よりも内側に設けても良い。その場合、押圧子16の位置を上方向にし、あるいはメタルドーム51,52,53,54自体をへこみ難い形状あるいは材料で構成することにより、導電性弾性体14が櫛歯電極群21に接触後、その面積を大きくしてからメタルドーム51,52,53,54がへこむようにするのが好ましい。さらに、メタルドーム51,52,53,54を備えるスイッチ56,58等に代えて、導電性弾性体14のような導電材料と、櫛歯電極群21のような複数電極から構成される電極群からスイッチを構成しても良い。
【産業上の利用可能性】
【0057】
本発明は、電子機器、特に小型の電子機器に利用することができる。
【符号の説明】
【0058】
1 携帯電話(電子機器)
2 多方向スイッチ部材
3 表示部
12 多方向キー
13 中央キー
14a,14b,14c,14d,14e,14f,14g,14h,14 導電性弾性体
20 PCB(印刷回路基板)
21a,21b,21c,21d,21e,21f,21g,21h,21 櫛歯電極群(接点電極群)
51,52,53,54 メタルドーム(ドーム型スイッチあるいはその上位概念のスイッチの構成部)
56,58 スイッチ
120 カーソル(表示体の一例)
121 背景
130 別の画面
150 制御部
151 CPU(速度変更手段、処理終了手段)
152 ROM(メモリの一例)
153 RAM(メモリの一例)
155 EEPROM(メモリの一例)
【特許請求の範囲】
【請求項1】
その面内にて多方向の操作を可能とする多方向スイッチ部材であって、
その面内の多方向において表裏方向に押圧操作可能な1または2以上の多方向キーと、
上記多方向キーからの押圧を検知するための印刷回路基板と、
を備え、
上記多方向キーの裏方向の複数箇所に、上記印刷回路基板への押圧の強さにより接触面積を変える弾性変形可能な導電性弾性体をそれぞれ有し、
上記印刷回路基板の表側において上記導電性弾性体と接触可能な位置には、上記導電性弾性体の接触により導通する複数の電極から構成される接点電極群をそれぞれ有し、
上記多方向キーの上記面内の多方向の内の少なくとも一つの方向において、上記多方向キーの裏方向には、上記導電性弾性体の上記接点電極群への接触より強い押圧により入力されるスイッチを有することを特徴とする多方向スイッチ部材。
【請求項2】
前記スイッチは、非接触状態の複数の電極と、その一部の電極と接続される弾性変形可能なドームとを有するドーム型のスイッチであることを特徴とする請求項1に記載の多方向スイッチ部材。
【請求項3】
請求項1または請求項2に記載の多方向スイッチ部材を備えることを特徴とする電子機器。
【請求項4】
前記多方向スイッチ部材の操作に基づく処理を制御する制御部を備え、
その制御部は、
前記導電性弾性体が前記接点電極群に接触する面積の大きさに応じて、表示体若しくはその背景の移動速度あるいは当該表示体の拡大若しくは縮小速度を変える速度変更手段と、
前記スイッチの入力により上記速度変更手段による処理を終了する処理終了手段と、
を備えることを特徴とする請求項3に記載の電子機器。
【請求項5】
前記処理終了手段は、前記速度変更手段による処理を終了すると共に、別の画面の表示を行うことを特徴とする請求項4に記載の電子機器。
【請求項1】
その面内にて多方向の操作を可能とする多方向スイッチ部材であって、
その面内の多方向において表裏方向に押圧操作可能な1または2以上の多方向キーと、
上記多方向キーからの押圧を検知するための印刷回路基板と、
を備え、
上記多方向キーの裏方向の複数箇所に、上記印刷回路基板への押圧の強さにより接触面積を変える弾性変形可能な導電性弾性体をそれぞれ有し、
上記印刷回路基板の表側において上記導電性弾性体と接触可能な位置には、上記導電性弾性体の接触により導通する複数の電極から構成される接点電極群をそれぞれ有し、
上記多方向キーの上記面内の多方向の内の少なくとも一つの方向において、上記多方向キーの裏方向には、上記導電性弾性体の上記接点電極群への接触より強い押圧により入力されるスイッチを有することを特徴とする多方向スイッチ部材。
【請求項2】
前記スイッチは、非接触状態の複数の電極と、その一部の電極と接続される弾性変形可能なドームとを有するドーム型のスイッチであることを特徴とする請求項1に記載の多方向スイッチ部材。
【請求項3】
請求項1または請求項2に記載の多方向スイッチ部材を備えることを特徴とする電子機器。
【請求項4】
前記多方向スイッチ部材の操作に基づく処理を制御する制御部を備え、
その制御部は、
前記導電性弾性体が前記接点電極群に接触する面積の大きさに応じて、表示体若しくはその背景の移動速度あるいは当該表示体の拡大若しくは縮小速度を変える速度変更手段と、
前記スイッチの入力により上記速度変更手段による処理を終了する処理終了手段と、
を備えることを特徴とする請求項3に記載の電子機器。
【請求項5】
前記処理終了手段は、前記速度変更手段による処理を終了すると共に、別の画面の表示を行うことを特徴とする請求項4に記載の電子機器。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】

【図8】

【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2011−119116(P2011−119116A)
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願番号】特願2009−275056(P2009−275056)
【出願日】平成21年12月3日(2009.12.3)
【出願人】(000190116)信越ポリマー株式会社 (1,394)
【Fターム(参考)】
【公開日】平成23年6月16日(2011.6.16)
【国際特許分類】
【出願日】平成21年12月3日(2009.12.3)
【出願人】(000190116)信越ポリマー株式会社 (1,394)
【Fターム(参考)】
[ Back to top ]