
多方向入力装置
【課題】操作方向による荷重検出精度のばらつきを低減した多方向入力装置を提供すること。
【解決手段】表面側に複数の押圧部(33a〜33d)が等角度間隔に配置される操作部材(3)と、操作部材(3)の裏面側に対向配置され、押圧部(33a〜33d)と対応する表面側の位置にスイッチを備える基板(6)と、基板(6)の裏面側における操作部材(3)の中央に対応する位置に設けられる荷重センサ(7)と、荷重センサ(7)に対して荷重を印加できるように基板(6)の裏面側に配置されるフレーム(8)と、を備え、押圧部(33a〜33d)に対する所定の押圧力により当該押圧部(33a〜33d)と対応するスイッチの導通状態が切り替えられると共に、基板(6)の移動を伴って、フレーム(8)により押圧部(33a〜33d)に対する押圧力に対応する荷重が荷重センサ(7)に印加されることを特徴とする。
【解決手段】表面側に複数の押圧部(33a〜33d)が等角度間隔に配置される操作部材(3)と、操作部材(3)の裏面側に対向配置され、押圧部(33a〜33d)と対応する表面側の位置にスイッチを備える基板(6)と、基板(6)の裏面側における操作部材(3)の中央に対応する位置に設けられる荷重センサ(7)と、荷重センサ(7)に対して荷重を印加できるように基板(6)の裏面側に配置されるフレーム(8)と、を備え、押圧部(33a〜33d)に対する所定の押圧力により当該押圧部(33a〜33d)と対応するスイッチの導通状態が切り替えられると共に、基板(6)の移動を伴って、フレーム(8)により押圧部(33a〜33d)に対する押圧力に対応する荷重が荷重センサ(7)に印加されることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、携帯電子機器やゲーム機用コントローラなどにおける方向入力操作に好適な多方向入力装置に関する。
【背景技術】
【0002】
従来、感圧導電ゴムにおける内部抵抗を変化させることで方向入力操作を検出する多方向入力装置が提案されている(例えば、特許文献1参照)。この多方向入力装置においては、各一対の電極で構成される4組の接点電極が基板上に90°間隔で形成されており、各接点電極上には感圧導電ゴムがそれぞれ配置されている。また、操作レバーが傾倒すると、傾倒方向の感圧導電ゴムが押圧されるように構成されている。感圧導電ゴムが押圧されると押圧量に応じて感圧導電ゴムの内部抵抗が減少するため、方向入力操作をアナログ的に検出できる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−278695号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述したような従来の多方向入力装置は、特性のばらつきやすい感圧導電ゴムを複数用いていることから、レバーの傾倒量が同じでも各接点電極を構成する電極間の抵抗値にばらつきが生じてしまう。このため、操作方向によって出力がばらつき、所望の荷重検出精度を得ることができないという問題がある。
【0005】
本発明はかかる点に鑑みてなされたものであり、操作方向による荷重検出精度のばらつきを低減した多方向入力装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の多方向入力装置は、表面側に複数の押圧部が等角度間隔に配置される操作部材と、前記操作部材の裏面側に対向配置され、前記押圧部と対応する表面側の位置にスイッチを備える基板と、前記基板の裏面側における前記操作部材の中央に対応する位置に設けられる荷重センサと、前記荷重センサに対して荷重を印加できるように前記基板の裏面側に配置される荷重印加部材と、を備え、前記押圧部に対する所定の押圧力により当該押圧部と対応するスイッチの導通状態が切り替えられると共に、前記基板の移動を伴って、前記荷重印加部材により前記押圧部に対する押圧力に対応する荷重が前記荷重センサに印加されることを特徴とする。
【0007】
この構成によれば、押圧部に対する一定の押圧力により当該押圧部と対応するスイッチの導通状態が切り替えられると共に、基板の初期位置からの移動を伴って、荷重印加部材により押圧部に対する押圧力に対応する荷重が荷重センサに印加されるようになっているため、スイッチの導通状態によって操作方向を検出すると共に、荷重センサによって押圧力に対応する荷重を検出できる。そして、操作方向に依らず荷重を検出する荷重センサが共通であるため、操作方向による荷重検出精度のばらつきを低減できる。
【0008】
本発明の多方向入力装置において、前記荷重センサは、前記基板の裏面に取り付けられ、前記基板は、前記押圧部に対する押圧力に応じて移動可能に前記操作部材と前記荷重印加部材との間に配置されており、前記押圧力により前記基板が初期位置から前記荷重印加部材側に移動し、前記基板と前記荷重印加部材とで前記荷重センサが挟み込まれて前記押圧力に対応する荷重が前記荷重センサに印加されることが好ましい。この構成によれば、押圧力により基板が初期位置から荷重印加部材側に移動し、基板と荷重印加部材とで荷重センサが挟み込まれて押圧力に対応する荷重が荷重センサに印加されるようになっているため、押圧される押圧部が異なる場合でも、押圧力に応じた基板の移動量は略等しくなる。その結果、押圧される押圧部が異なる場合でも、押圧力に応じた略均一な荷重を荷重センサに印加することができるため、荷重センサによって検出される荷重(検出値)のばらつきを低減することができる。
【0009】
本発明の多方向入力装置において、前記荷重印加部材は、前記荷重センサに対応して配置され前記荷重センサに対して荷重を印加する荷重印加部と、前記荷重印加部の外側に配置され前記基板に対して前記操作部材に向かう方向の付勢力を付与する付勢部と、を備えていることが好ましい。この構成によれば、荷重印加部材が荷重印加部と付勢部とを併せ持つため、部品点数を削減して多方向入力装置を小型化できる。
【0010】
本発明の多方向入力装置において、前記荷重印加部は、前記荷重センサに印加される荷重に応じて変形するように構成されていることが好ましい。この構成によれば、印加される荷重に応じて荷重印加部が変形するように構成されているため、荷重センサに過大な荷重が印加されて荷重センサが破損することを防止できる。これにより、多方向入力装置を長寿命化できる。
【0011】
本発明の多方向入力装置において、前記操作部材及び前記基板を収容する筐体を具備し、前記筐体は、前記操作部材の前記押圧部を露出させる開口部が設けられたケースと、前記基板の裏面側に対向配置されると共に前記ケースに一体化されるフレームとを有し、前記フレームによって前記荷重印加部材が構成されていることが好ましい。この構成によれば、荷重印加部材が筐体の一部であるフレームで構成されるので、部品点数の増加を抑制して、多方向入力装置の小型化を図ることができると共に、ケースに対して荷重印加部材を精度良く配置することが可能となる。
【0012】
本発明の多方向入力装置において、一端側が前記荷重印加部材に固定されたスペーサ部材を備え、前記基板は前記スペーサ部材に対して揺動可能に配置されていることが好ましい。この構成によれば、荷重印加部材に固定されたスペーサ部材を、基板が移動する際のガイドとして機能させることができるため、押圧力に応じた適切な荷重を荷重センサに印加することができる。
【0013】
本発明の多方向入力装置において、前記スペーサ部材の他端側に、前記操作部材の中央に対応する部分において前記操作部材と対向する凹部を備え、前記操作部材と前記荷重印加部材との距離を所定以上に保つことが好ましい。この構成によれば、操作部材の中央部分と荷重印加部材との距離が所定以上に保たれているため、スペーサ部材を挟むように配置される複数のスイッチの導通状態が同時に切り替えられることがない。これにより、入力方向の検出エラーを防止できる。
【0014】
本発明の多方向入力装置において、前記スイッチは、前記基板の表面に形成された固定接点対と当該固定接点対に対向配置される可動接点により構成されると共に、前記操作部材と前記基板との間に前記固定接点対に対応するドーム状の弾性部材を備え、前記可動接点を介して前記固定接点対が導通する際に前記弾性部材の変形により所定の触感が得られるように構成されていることが好ましい。この構成によれば、ドーム状の弾性部材によって固定接点対が導通状態になる際に所定の触感が得られるように構成されているため、操作者は、固定接点対が導通状態であることを触感から判別できる。これにより、多方向入力装置の操作感を高めることができる。
【0015】
本発明の多方向入力装置において、前記可動接点は、前記基板と前記弾性部材との間に設けられた金属板によって構成されており、前記押圧部に対する押圧力により当該押圧部に対応する前記弾性部材が変形すると、前記可動接点とこれに対応する前記固定接点対とが接触して前記固定接点対を導通させることが好ましい。この構成によれば、金属板によって固定接点対を導通させるため、導通時における固定接点対の抵抗を下げることができる。
【発明の効果】
【0016】
本発明によれば、操作方向による荷重検出精度のばらつきを低減した多方向入力装置を提供できる。
【図面の簡単な説明】
【0017】
【図1】本実施の形態に係る多方向入力装置の分解斜視図である。
【図2】本実施の形態に係る多方向入力装置の外観を示す斜視図である。
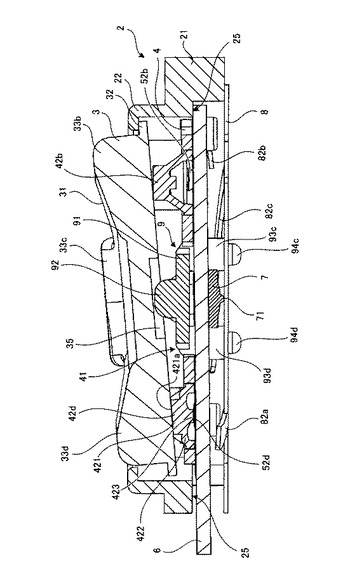
【図3】本実施の形態に係る多方向入力装置の内部構造を示す断面図である。
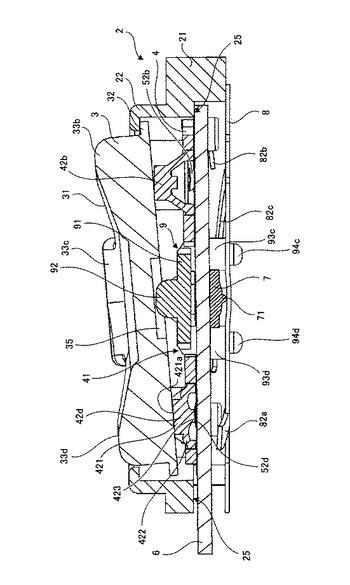
【図4】本実施の形態に係る多方向入力装置において所定方向の入力操作が行われた状態の断面図である。
【図5】本実施の形態に係る多方向入力装置において強い押圧力で所定方向の入力操作が行われた状態の断面図である。
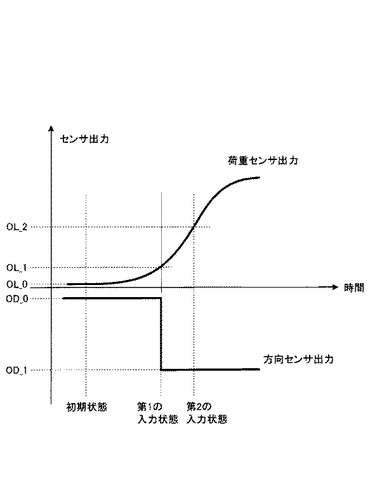
【図6】本実施の形態に係る多方向入力装置に対して所定方向の入力操作が行われた場合の出力特性を示す特性図である。
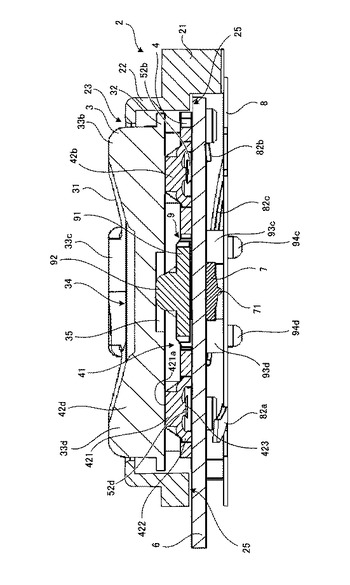
【図7】本実施の形態に係る多方向入力装置において操作部材の中央が押圧された状態の断面図である。
【発明を実施するための形態】
【0018】
以下、本発明の一実施の形態について添付図面を参照して詳細に説明する。本実施の形態に係る多方向入力装置は、例えば、携帯電子機器やゲーム機用コントローラなどにおける方向入力操作(押圧入力操作)に用いられるものである。なお、本実施の形態に係る多方向入力装置の用途については、これらに限定されるものではなく適宜変更が可能である。
【0019】
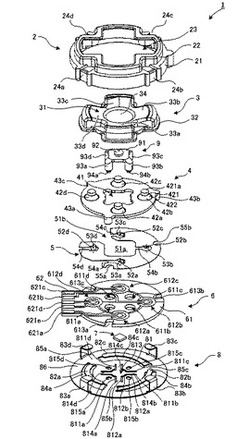
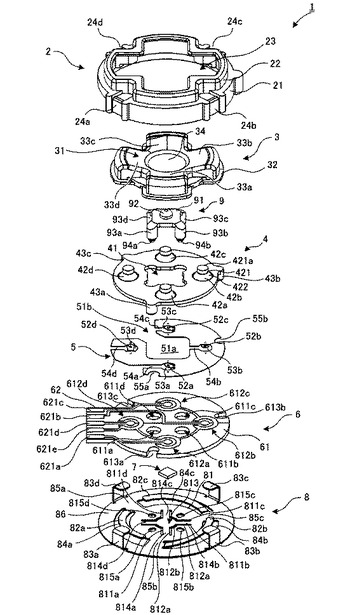
図1は、本実施の形態に係る多方向入力装置1の分解斜視図である。以下においては、説明の便宜上、図1に示す上方側を多方向入力装置1の上方側(表面側)とし、同図に示す下方側を多方向入力装置1の下方側(裏面側)として説明する。
【0020】
図1に示すように、本実施の形態に係る多方向入力装置1は、上方側の筐体を構成するケース2と、操作者からの操作入力を受け付ける操作部材3と、操作部材3への入力に応じて変形するラバー部材4と、ラバー部材4の下方側に配置される可動接点板5と、ラバー部材4及び可動接点板5を支持する基板6と、基板6の裏面に取り付けられる荷重センサ7と、下方側の筐体を構成するフレーム8とを備えている。また、多方向入力装置1は、下端部においてフレーム8に固定されるスペーサ部材9を備えており、筐体内において操作部材3とフレーム8との間隔を所定距離以上に保つことができるように構成されている。
【0021】
ケース2は、例えば、絶縁性の合成樹脂を用いて形成されている。ケース2は、概して円環形状を有する基部21と、この基部21の上面の内周縁部に立設された規制部22とを有している。規制部22は、平面視により概して十字形状を有している。規制部22の上端部は、概して十字形状を有する開口部23を規定している。なお、規制部22は、多方向入力装置1が組み立てられた状態で操作部材3の一定位置以上の上方側への移動を規制する役割を果たす。
【0022】
基部21の外周部には、略等間隔に複数(本実施の形態では4個)の係合溝24(24a〜24d)が設けられている。これらの係合溝24は、基部21の外周面から上面にかけて形成されている。ケース2の下面には、基部21の下端部より僅かに上方側の位置に係止部25が設けられている(図1に不図示、図3参照)。係止部25は、平坦面で構成され、詳細について後述するように、基板6の上面を係止する。なお、ケース2の下方は開放されており、基板6を配置可能となっている。また、基部21の一部には、後述する基板6の端子形成部62を突出させるための切り欠き部が形成されている。
【0023】
操作部材3は、例えば、絶縁性の合成樹脂を用いて形成されている。操作部材3は、平面視により概して十字形状を有する十字操作部31と、この十字操作部31の下端部から外側に延出した延出部32とを有している。十字操作部31の外形寸法は、ケース2の開口部23を通過可能な寸法に設けられ、多方向入力装置1が組み立てられた状態で開口部23からその一部が露出する。延出部32は、ケース2の開口部23を規定する規制部22の内壁面(天井面)と当接する寸法に設けられている。
【0024】
十字操作部31は、複数(本実施の形態では4個)の押圧部33(33a〜33d)と、これらの押圧部33を連結する連結部34とから構成される。押圧部33a〜33dは、略等角度間隔(90°間隔)に配置されている。連結部34の上面(表面)には、円形状の凹部が設けられている。これらの押圧部33(33a〜33d)及び連結部34の上面で操作部材3の押圧領域が構成される。十字操作部31の下面(裏面)は、概して平坦面で構成されている。十字操作部31の下面のうち、連結部34に対応する位置には、円形状の凹部35が設けられている(図1に不図示、図3参照)。
【0025】
ラバー部材4は、合成ゴムなどの弾性材料を用いて形成されている。ラバー部材4は、概して円板形状を有しており、その中央には開口部41が設けられている。開口部41は、概して正方形状を有すると共にそれぞれの角部に半円形状が付加された形状を有している。ラバー部材4の上面であって開口部41の外側には、複数(本実施の形態では4個)のドーム状部42(42a〜42d)が設けられている。これらのドーム状部42a〜42dは、弾性部材を構成するものであり、略等角度間隔に設けられている。ドーム状部42a〜42dは、押圧部33a〜33dに対応する位置に配置されている。
【0026】
これらのドーム状部42a〜42dは、上面に平面部421aを有する円柱形状部421と、この円柱形状部421の下端部に連続して設けられたスカート部422とを有している。円柱形状部421の下面には、後述する可動接点52(52a〜52d)を押圧する突出部423が設けられている(図1に不図示、図3参照)。ドーム状部42は、平面部421aに下向きの力が掛かると、スカート部422が反転して円柱形状部421が下方側に移動可能に構成されている。
【0027】
なお、本実施の形態において、ドーム状部42a〜42dは、ラバー部材4と一体に構成する場合について説明しているが、ドーム状部42a〜42dの構成については、これに限定されるものではなく適宜変更が可能である。例えば、ドーム状部42a〜42dをラバー部材4とは別部材で構成し、ラバー部材4に形成された開口部にこれらを配設しても良い。なお、この場合には、ラバー部材4の材質とドーム状部42a〜42dの材質は、必ずしも共通のものでなくても良い。
【0028】
また、ラバー部材4の外周縁部には、複数(本実施の形態では3個)の位置決め片43(43a〜43c)が設けられている。これらの位置決め片43a〜43cは、概して円柱形状を有し、ラバー部材4の外周縁部の下面から下方側に突出して設けられている。これらの位置決め片43a〜43cは、基板6に対してラバー部材4及び可動接点板5を位置決めする役割を果たす。
【0029】
可動接点板5は、導電性を有する金属板に打ち抜き加工及びプレス加工を施して形成されている。可動接点板5は、一部が欠落した概して円板形状を有しており、その中央部分を含む位置には開口部51が設けられている。開口部51は、角部が丸みを帯びた矩形状の開口部51aと、この開口部51aの一つの角部から可動接点板5の外周方向に延在するように設けられた開口部51bとが連結された形状を有している。これにより、可動接点板5は、平面視により概してC字形状になっている。
【0030】
開口部51aの外側には複数(本実施の形態では4個)の可動接点52(52a〜52d)が略等角度間隔に設けられている。可動接点52a〜52dは、ドーム状部42a〜42dに対応する位置に配置されている。例えば、可動接点52(52a〜52d)は、概して円形状の開口部53(53a〜53d)に配置された舌片で構成される。可動接点52を構成する舌片においては、基端部が開口部53を規定する外周縁部に接続され、先端部が基端部から僅かに上方側に延出して設けられている。舌片の先端部は、開口部53の中央であって可動接点板5の表面よりも僅かに上方側の位置に配置され、上方側からの押圧力により下方側に移動する一方、押圧力の解除により初期位置に復帰可能に構成されている。
【0031】
可動接点52a〜52dが配置される開口部53a〜53dは、それぞれ同一方向(図1に示す左方側)に延在する溝部54a〜54dと接続されている。これらの溝部54a〜54dには、多方向入力装置1が組み立てられた状態(基板6上に可動接点板5が配置された状態)において、基板6の上面に形成される配線パターンの一部が収容される。
【0032】
可動接点板5の外周縁部には、複数(本実施の形態では2個)の切り欠き部55(55a、55b)が形成されている。これらの切り欠き部55a、55bは、ラバー部材4の位置決め片43a、43bに対応する位置に配置されている。多方向入力装置1が組み立てられた状態において、切り欠き部55a、55bは、ラバー部材4の位置決め片43a、43bを収容可能な寸法に構成されている。
【0033】
基板6は、表面(上面)に導電性の材料による接点パターン及び配線パターンが形成された絶縁性の板状部材で構成される。基板6は、概して円板形状を有する固定接点形成部61と、この固定接点形成部61の一部の外周縁部から側方側(図1に示す左方側)に突出して形成された概して矩形状の端子形成部62とを含んで構成される。基板6は、概して均一な板厚を有する板状部材で構成される。固定接点形成部61及び端子形成部62の下面には、平面部が形成される。
【0034】
固定接点形成部61の中央には、複数(本実施の形態では4個)の開口部611(611a〜611d)が設けられている。これらの開口部611は、円形状を有しており、後述するスペーサ部材9の脚部93(93a〜93d)を収容可能に構成されている。開口部611a〜611dの外側には、複数組(本実施の形態では4組)の固定接点対612(612a〜612d)が略等角度間隔に設けられている。これらの固定接点対612a〜612dは、可動接点板5の可動接点52a〜52dに対応する位置に配置されている。固定接点対612a〜612dは、それぞれ概して円形状を有する内側接点と、この内側接点の外側であって一部を除く全周に配置された外側接点とにより構成されている。これらの内側接点及び外側接点により接点パターンが構成される。また、固定接点対612a〜612dとこれらの固定接点対612a〜612dとそれぞれ対向して配置される可動接点52a〜52dとによって、複数(本実施の形態では4つ)の押圧式のスイッチが構成されている。
【0035】
固定接点対612a〜612dの内側接点は、それぞれ端子形成部62に形成された接続端子621a〜621dに電気的に接続されている。一方、固定接点対612a〜612dの全ての外側接点は、互いに電気的に接続されると共に、接続端子621eと電気的に接続されている。固定接点対612a〜612dの内側接点と接続端子621a〜621dとの間、固定接点対612a〜612d間、並びに、固定接点対612a〜612dと接続端子621eとの間には、配線パターンが設けられている。これらの配線パターンにより、それぞれが電気的に接続される。基板6の裏面(下面)は、図示しないが、後述する荷重センサ7の図示しない配線パターンを介して、端子形成部62の下面に設けられた接続端子(不図示)と電気的に接続されている。
【0036】
基板6を構成する固定接点形成部61の外周縁部には、複数(本実施の形態では3個)の切り欠き部613(613a〜613c)が形成されている。これらの切り欠き部613a〜613cは、ラバー部材4の位置決め片43a〜43cに対応する位置に配置されている。多方向入力装置1が組み立てられた状態において、切り欠き部613a〜613cは、ラバー部材4の位置決め片43a〜43cを収容可能な寸法に構成されている。
【0037】
荷重センサ7は、上下方向の荷重を検出可能な圧電素子等のセンサ素子で構成される。荷重センサ7は、概して扁平な直方体形状を有しており、その上面に平坦面が設けられている。荷重センサ7は、その上面を基板6の下面(平坦面)に対して接着等により固定される。荷重センサ7は、基板6の下面の中央部において4個の開口部611a〜611dの内側の領域に固定される。荷重センサ7の下面には、下方側に突出した突起部71が設けられている(図1に不図示、図3参照)。荷重センサ7は、この突起部71に印加される上下方向の荷重を検出できるように構成されている。荷重センサ7には、図示省略しているが、検出した荷重に基づく信号を出力するための複数の端子(電極)が設けられており、これらの端子は基板6のランド部に半田付けにより接続されている。
【0038】
フレーム8は、荷重印加部材を構成するものであり、所定の弾性力が得られる金属板に打ち抜き加工及びプレス加工を施して形成されている。フレーム8は、概して円板形状を有しており、その中央に配置された円板形状部81と、この円板形状部81の外側に配置された複数(本実施の形態では3個)の付勢片82(82a〜82c)と、フレーム8の外周縁部から上方側に延出する複数(本実施の形態では4個)の係合片83(83a〜83d)とを含んで構成されている。
【0039】
円板形状部81には、複数(本実施の形態では4個)のスリット811(811a〜811d)が形成されている。これらのスリット811a〜811dは、円板形状部81の周方向に並べて配置されている。それぞれのスリット811は、円板形状部81の径方向に延在する2本の直線形状部812aと、これらの直線形状部812aの内側の端部を接続する円弧形状部812bとから構成される。
【0040】
これらのスリット811a〜811dの中央には、円板形状を有する荷重印加部813が設けられている。この荷重印加部813は、スリット811a〜811dを構成する円弧形状部812bの内側に配置される。なお、スリット811a〜811dを構成する直線形状部812aは、荷重印加部813の外周縁部から円板形状部81の径方向の中央近傍まで延在して形成されている。
【0041】
隣接するスリット811の直線形状部812aの間(たとえば、スリット811aの直線形状部812aと、スリット811bの直線形状部812aとの間)には、荷重印加部813の外周縁部に接続される複数(本実施の形態では4本)の腕部814(814a〜814d)が設けられている。すなわち、荷重印加部813は、円板形状部81の外周縁部近傍に4本の腕部814a〜814dを介して連結される構成を採る。このため、荷重印加部81は、上方側から印加される荷重に応じて僅かに下方側に撓むように構成される。
【0042】
また、荷重印加部813の外側であって、それぞれのスリット811を構成する直線形状部812aの内側の位置(言い換えると、隣接する腕部814a〜814dの間の位置)には、円形状の開口部815(815a〜815d)が形成されている。これらの開口部815a〜815dは、後述するスペーサ部材9の脚部93(93a〜93d)の下端部を固定する役割を果たす。
【0043】
付勢片82(82a〜82c)は、付勢部を構成するものであり、円板形状部81を規定する円弧状の開口部84(84a〜84c)内に設けられている。なお、円板形状部81は、これらの開口部84a〜84cの間に配置される連結部85a〜85cで、フレーム8の外周縁部に配置された円環形状部86と連結されている。付勢片82a〜82cは、それぞれ連結部85a〜85cの側面(端面)に接続して設けられている。付勢片82a〜82cの先端部は、開口部84a〜84cに沿って円弧状に延在すると共に、僅かに上方側に延出して設けられている。すなわち、付勢片82a〜82cの先端部は、フレーム8の表面よりも僅かに上方側の位置に配置され、上方側からの押圧力により下方側に移動する一方、押圧力の解除により初期位置に復帰可能に構成されている。
【0044】
係合片83(83a〜83d)は、フレーム8(円環形状部86)の外周縁部に略等間隔に設けられている。係合片83a〜83dは、ケース2の係合溝24a〜24dに配置されると共に、係合溝24a〜24dの上方側に配置される部分が内側(基部21の上面側)に折り曲げられることで、ケース2とフレーム8とを固定する。すなわち、フレーム8はケース2の開放された下方側を塞ぐようにケース2に取り付けられて、筐体を構成するケース2とフレーム8とが一体化される。なお、図1においては、ケース2の基部21の上面側に折り曲げられた状態の係合片83(83a〜83d)について示している。
【0045】
スペーサ部材9は、略矩形状の平面部91と、平面部91の上側中央部に設けられた凸部92と、平面部91の角部に相当する位置において平面部91から下方側に延びる複数(本実施の形態では4本)の脚部93a〜93dとを含んで構成されている。スペーサ部材9は、このような構成を有し、操作部材3とフレーム8との間隔(より具体的には、操作部材3の中央部とフレーム8との間隔)を所定距離以上に保つ支持部材として機能する。
【0046】
凸部92は、支持部を構成するものであり、上端部が球面形状に設けられている。脚部93a〜93dは、概して円柱形状を有しており、その下端部には、半球形状の突出部94a〜94d(図1において、突出部94c、94dは不図示)が設けられている。スペーサ部材9は、ラバー部材4に形成された開口部41、並びに、可動接点板5の開口部51aを通過可能な寸法に設けられている。また、脚部93a〜93dは、基板6に形成された開口部611a〜611dを挿通可能な寸法に設けられている。すなわち、脚部93a〜93dの外周面は、開口部611a〜611dの径より僅かに小径に設けられている。さらに、突出部94a〜94dは、フレーム8の円板形状部81に形成された開口部815a〜815dに係合可能な寸法に設けられている。
【0047】
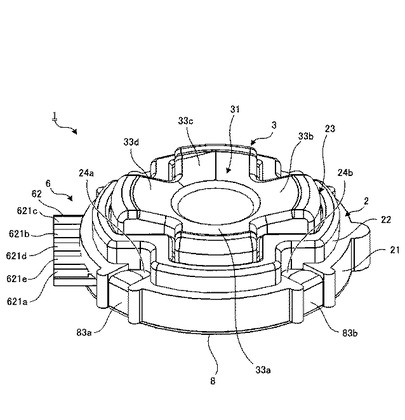
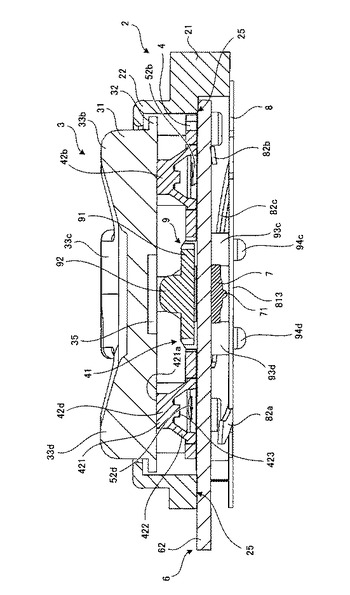
図2は、本実施の形態に係る多方向入力装置1の外観を示す斜視図であり、図3は、本実施の形態に係る多方向入力装置1の内部構造を示す断面図である。なお、図2及び図3においては、操作部材3で押圧操作を受けていない状態(初期状態)の多方向入力装置1を示している。
【0048】
図2に示すように、組み立て後の多方向入力装置1は、概して円盤形状を有している。ケース2及びフレーム8により構成される筐体には、上述した操作部材3、ラバー部材4、可動接点板5、基板6、荷重センサ7及びスペーサ部材9が収容されている。これらの構成部品を収容した状態でフレーム8の係合片83a〜83dをケース2の係合溝24a〜24dと係合させることで、ケース2とフレーム8とが固定されている。基板6の端子形成部62は、ケース2の基部21から側方側に突出している。端子形成部62の上面に設けられた接続端子621a〜621eが露出すると共に、端子形成部62の下面には、荷重センサ7に導通される図示しない接続端子が露出し、多方向入力装置1が搭載される機器のコネクタ等に接続される。
【0049】
多方向入力装置1の内部においては、図3に示すように、ケース2及びフレーム8の間に形成される空間を上下に仕切る位置に基板6が配置される。基板6の下方側の空間に荷重センサ7が配設される一方、基板6の上方側の空間にラバー部材4、可動接点板5及び操作部材3が配設される。なお、操作部材3は、その上端部(十字操作部31の上端部)がケース2の開口部23から露出するように基板6の上方側の空間に配設されている。
【0050】
基板6は、フレーム8に設けられた付勢片82a〜82cによって上向きに付勢されている。付勢片82a〜82cの付勢力により、基板6は、初期状態(押圧入力操作が行われていない状態)においてケース2の内壁に設けられた係止部25に押し付けられている。係止部25は、フレーム8の表面から一定の間隔を空けて設けられているため、初期状態において、基板6の表面とフレーム8の表面とは略平行な状態に保たれている。
【0051】
荷重センサ7は、下面に設けられた突起部71がフレーム8(より具体的には荷重印加部813)の上面と接触しないように基板6の裏面側中央に取り付けられている。つまり、初期状態において、突起部71と荷重印加部813とは接触しておらず、荷重センサ7には荷重が印加されていない。
【0052】
基板6の上面には、可動接点板5を介してラバー部材4が配置されている。ラバー部材4は、可動接点板5を挟んだ状態で基板6の上面に載置される。ラバー部材4は、位置決め片43a〜43cを、可動接点板5の切り欠き部55a、55b、並びに、基板6の切り欠き部613a〜613cに挿通した状態で基板6の上面に載置される。このように位置決め片43a〜43cで位置決めした状態でラバー部材4及び可動接点板5が基板6上に配置されるので、基板6上の所望の位置に可動接点板5及びラバー部材4が配置されるように構成されている。
【0053】
ラバー部材4のドーム状部42(42a〜42d)は、スカート部422の下端部が基板6の表面に接触する一方、円柱形状部421の下面に設けられた突出部423が基板6の表面から一定距離だけ離間した状態で配置される。この突出部423に対応する位置に可動接点板5に形成された可動接点52(52a〜52d)が配置される。また、可動接点52(52a〜52d)に対応する基板6上の位置に固定接点対612(612a〜612d)の内側接点が配置される。なお、固定接点対612(612a〜612d)の外側接点は、可動接点板5の開口部53(53a〜53d)を規定する部分に接触する位置に配置される。初期状態において、円柱形状部421の下面に設けられた突出部423は、可動接点52(52a〜52d)と離間した状態である。また、可動接点52(52a〜52d)は、固定接点対612(612a〜612d)の内側接点と離間した状態である。なお、ドーム状部42a〜42dの上面に設けられた平面部421aは、同一平面上に配置された状態となっている。
【0054】
操作部材3は、ドーム状部42a〜42dの平面部421aに載置されている。すなわち、操作部材3は、ドーム状部42a〜42d(より具体的には、平面部421a)によって下面を支持されている。操作部材3の十字操作部31の下端部に設けられた延出部32は、ケース2の開口部23よりも側方側の位置まで延出している。操作部材3は、ケース2の規制部22に対する延出部32の当接により一定位置以上の上方側への移動が規制されている。
【0055】
スペーサ部材9は、平面部91がラバー部材4の開口部41に収容されると共に、脚部93(93a〜93d)が基板6の開口部611(611a〜611d)に挿通された状態で配置される。開口部611(611a〜611d)は、脚部93(93a〜93d)の外周寸法よりも大径にも設けられていることから、基板6は、これらの脚部93(93a〜93d)にガイドされて上下方向に移動可能に構成される。脚部93(93a〜93d)の下端部に設けられた突出部94(94a〜94d)は、フレーム8の開口部815(815a〜815d)に圧入により係合(固定)している。平面部91の上面に設けられた凸部92は、操作部材3の下面に設けられた凹部35と離間状態で対向して配置される。初期状態において、凸部92の上端部は、ドーム状部42(42a〜42d)の平面部421aが配置される同一平面よりも下方側の位置に配置されている。
【0056】
図3に示すように、初期状態において、可動接点52(52a〜52d)は、固定接点対612(612a〜612d)の内側接点と離間した状態になっている。このため、接続端子621a〜621dと接続端子621eとの間はいずれも高抵抗状態(非導通状態)となっている。すなわち、可動接点52と固定接点対612とで構成されるスイッチは、いずれもオフ状態(非導通状態)となっている。一方、操作者の押圧入力操作により可動接点52(52a〜52d)が押し下げられると、対応する固定接点対612(612a〜612d)の内側接点に可動接点52(52a〜52d)が接触して内側接点と可動接点板5とが導通する。可動接点板5は、予め外側接点と接触(導通)しているから、これによって対応する固定接点対612(612a〜612d)が導通する。すなわち、対応するスイッチがオフ状態(非導通状態)からオン状態(導通状態)へと切り替えられる。これにより、押し下げられた可動接点52(52a〜52d)に対応する接続端子621(621a〜621d)と、接続端子621eとの間の電気抵抗が低下する。本実施の形態に係る多方向入力装置1においては、操作者の押圧入力操作によって生じる接続端子621a〜621dと接続端子621eとの間の電気抵抗(導通状態)の変化を利用することで、押圧入力操作による入力方向を検出可能に構成されている。すなわち、本実施の形態に係る多方向入力装置1においては、可動接点52a〜52d及び固定接点対612a〜612dにより、入力方向を検出する方向センサを構成している。
【0057】
そして、方向センサが入力方向を検出している状態、すなわち、操作者の押圧入力操作により固定接点対612a〜612dのいずれかが導通している状態において、さらに高い押圧力で操作部材3が押圧されると、基板6が脚部93a〜93dに沿って下方に移動する。荷重センサ7は、基板6の裏面に取り付けられているため、基板6が下方に移動すると、荷重センサ7の突起部71とフレーム8の荷重印加部813とが接触して荷重センサ7に荷重が印加される。荷重センサ7に印加される荷重は、押圧力に対応する大きさである。これにより、入力方向を検出している状態において、操作者の押圧入力操作における押圧力を検出できる。つまり、入力方向に加え、入力に係る押圧力の強度を検出することができる。
【0058】
次に、本実施の形態に係る多方向入力装置1に対して押圧入力操作が行われた状態について説明する。ここでは、一例として押圧部33dが押圧された状態について説明するが、他の押圧部33が押圧される場合も同様である。
【0059】
図4は、所定方向の入力操作が行われた状態(第1の入力状態)の断面図である。図3に示す状態において一定の押圧力で押圧部33dを押圧すると、図4に示すように、操作部材3の押圧部33d側が押し下げられる。これによって、対応するドーム状部42dのスカート部422が反転する。同時にドーム状部42dの突出部423を介して可動接点52dが押圧されて、可動接点52dと固定接点対612dの内側接点とが接触する。その結果、固定接点対612dが導通状態となって入力方向が検出される。具体的には、方向センサは、固定接点対612dに対応する方向において所定値(図6のOD_1参照)を出力し、他の方向において初期値(図6のOD_0参照)を出力する。
【0060】
また、操作部材3の押圧部33d側が押し下げられることで、ドーム状部42d及び可動接点52dを介して基板6が押し下げられ、荷重センサ7(突起部71)とフレーム8(荷重印加部813)とが接触する。この状態において、荷重センサ7には小さな荷重が印加されている。その結果、荷重センサ7の出力は、初期値から僅かに変化した所定値(図6のOL_1参照)となる。このため、この状態においては所定の押圧力(第1の押圧力)が検出される。なお、ドーム状部42dはスカート部422が反転する際に所定の触感(クリック感)が得られるように構成されており、操作者は、得られる触感から多方向入力装置1が入力状態にあることを判別できようになっている。このようにドーム状部42を構成することにより、多方向入力装置1における入力の操作感を高めることができる。
【0061】
図5は、より強い押圧力で入力操作が行われた状態(第2の入力状態)の断面図である。図4に示す状態からさらに強い力で押圧部33dを押圧すると、図5に示すように、操作部材3の押圧部33d側がさらに押し下げられる。この状態において、既にドーム状部42dのスカート部422は反転しているため、ドーム状部42d及び可動接点52dの状態は変わらない。すなわち、固定接点対612dは導通状態であり、入力方向は検出され続けている。方向センサは、固定接点対612dに対応する方向において所定値(OD_1)を出力し、他の方向において初期値(OD_0)を出力している。
【0062】
一方、操作部材3の押圧部33d側は図4に示す状態からさらに押し下げられるため、これに応じて基板6はさらに押し下げられる。その結果、突起部71は荷重印加部813によって強く押圧されて、荷重センサ7にはより大きな荷重が印加される。荷重センサ7に印加される荷重は第1の入力状態より大きくなり、荷重センサ7の出力は所定値(図6のOL_2参照)となる。これにより、所定の押圧力(第2の押圧力)が検出される。なお、押圧部33dが押し下げられ、図3に示す初期状態から図5に示す状態に至る際に、押圧された押圧部33dと操作部材3の中央部を挟んで対向する位置にある延出部32は、ケース2の規制部22の天井面と当接する。そして、この当接箇所を支点として操作部材3は傾き、この傾き動作に伴って基板6が傾くことにより、押圧された押圧部33d側の基板6が確実に押し下げられるものとなっている。
【0063】
なお、荷重センサ7は、基板6とフレーム8(荷重印加部813)とで挟み込まれることで荷重が印加されるように構成されている。これにより、押圧される押圧部が異なる場合でも、押圧力に応じた略均一な荷重が印加されるため、荷重検出精度を高めることができる。また、荷重印加部813は板ばね状になっており、荷重センサ7に大きな荷重が印加されると、その荷重に応じて下方側に変形するように構成されている。これにより、荷重センサ7に印加される荷重が緩和される。
【0064】
図6は、上述した入力操作が行われた場合の多方向入力装置1の出力特性を示す特性図である。図6は、徐々に押圧力を大きくする場合の出力特性を示す。縦軸はセンサ出力を表し、横軸は時間を表す。図6に示すように、いずれかの押圧部33に所定(しきい値)以上の押圧力が掛かるまで固定接点対612は導通しない(初期状態〜第1の入力状態)。この状態において、方向センサの出力はいずれの方向においても初期値(OD_0)であるから、入力方向は検出されない。一方、第1の入力状態の直前において、基板6は僅かに押し下げられて荷重センサ7とフレーム8とは接触する。この状態では、荷重センサ7の出力は初期値(OL_0)と所定値(OL_1)との間の値になる。ただし、このように入力方向が検出されない状態(初期状態〜第1の入力状態)において、荷重センサ7の出力は押圧力の検出に用いられない。
【0065】
次に、上述の押圧部33に所定(しきい値)の押圧力が掛かると、対応するドーム状部42のスカート部422が反転して固定接点対612が導通する(第1の入力状態)。これにより、方向センサにおいて対応する方向の出力が所定値(OD_1)となり、入力方向が検出される。また、この状態において、荷重センサ7の出力は所定値(OL_1)となる。このため、方向センサの出力と荷重センサ7の出力とから、所定方向の小さな荷重が検出される。
【0066】
その後、上述の押圧部33にさらに大きな押圧力が掛かると、基板6はさらに下方に移動して荷重センサ7に大きな荷重が印加される(第2の入力状態)。この状態において、対応する方向センサの出力は所定値(OD_1)である。また、荷重センサ7の出力は所定値(OL_2)となる。このため、方向センサの出力と荷重センサ7の出力とから、所定方向の大きな荷重が検出される。
【0067】
なお、以上の説明では便宜上、1個の押圧部33を押圧する場合について説明したが、隣接する2個の押圧部33(例えば、押圧部33a、33b)を押圧する場合も同様である。隣接する2個の押圧部33を押圧する場合、それら2個の押圧部33により決定される方向(例えば、斜め方向)と、これらの押圧部33に印加される押圧力(荷重)を検出することができる。
【0068】
次に、操作部材3の中央(連結部34)が押圧された場合について説明する。図7は、十字操作部31の中央(連結部34)が押圧された状態の断面図である。図7に示すように、十字操作部31の中央が押圧されると、操作部材3全体が下方側(ケース2の内部側)に移動する。一定位置まで操作部材3が移動すると、操作部材3の凹部35とスペーサ部材9の凸部92とが接触した状態となる。この状態においては、複数のドーム状部42のスカート部422は撓んでいるが、いずれも反転することはない。このため、可動接点52は固定接点対612の内側接点と接触しておらず、いずれの固定接点対612も導通していない状態で維持される。このように、操作部材3の中央が押圧された場合でも、操作部材3(凹部35)がスペーサ部材9(凸部92)によって支持されるため、対角に位置する複数の固定接点対612が同時に導通状態になることはない。これにより、入力方向の検出エラーを防止できる。なお、対角に位置する複数の押圧部33が押圧される場合も同様である。
【0069】
以上のように、本実施の形態に係る多方向入力装置1においては、操作部材3の押圧部33に対する一定の押圧力により、その押圧部33と対応する固定接点対612が導通すると共に、フレーム8に設けられた荷重印加部813により押圧部33に対する押圧力に対応する荷重が荷重センサ7に印加されるようになっているため、固定接点対612の導通によって操作方向を検出すると共に、荷重センサ7によって押圧力に対応する荷重を検出することが可能となる。
【0070】
特に、本実施の形態に係る多方向入力装置1においては、十字操作部31の中央部(連結部34)に対応する位置に荷重センサ7を配置することで、1個の荷重センサ7で全入力方向の荷重を検出できる。つまり、各方向の荷重を検出する荷重センサ7を共通化できるため、操作方向による荷重検出精度のばらつきを低減することが可能となる。しかも、荷重センサ7を共通化することにより、アナログポートが1系統で済むため、多方向入力装置1に接続される信号処理回路の構成を簡略化することが可能となる。
【0071】
また、本実施の形態に係る多方向入力装置1において、荷重印加部813は印加される荷重に応じて変形する(より具体的には下方側に退避する)ように構成されているため、荷重センサ7に過大な荷重が印加されることを防止できる。これにより、荷重センサ7の破損等の不具合を防止でき、多方向入力装置1を長寿命化することが可能となる。
【0072】
また、本実施の形態に係る多方向入力装置1において、フレーム8は、板ばね状の荷重印加部813と付勢片82とを一体に備えている。このため、これらを別体で設ける場合と比較して部品点数を削減することができ、多方向入力装置1を小型化することが可能となる。
【0073】
また、本実施の形態に係る多方向入力装置1においては、荷重印加部材を筐体であるフレーム8により構成しているので、別途、荷重印加部材を筐体内に設ける必要はなく、部品点数の増加を抑制して、多方向入力装置1の小型化を図ることができる。また、荷重印加部材は、直接、ケース2に取り付けられるので、ケース2に対する荷重印加部材の上下方向における位置精度(高さ位置精度)が高められ、個々の多方向入力装置1において、荷重印加部材の取付精度に起因する検出特性のばらつきを低減することが可能となる。
【0074】
さらに、本実施の形態に係る多方向入力装置1において、スペーサ部材9を、基板6が上下方向に移動する際のガイドとして機能させることができるため、荷重センサ7には押圧力に応じた適切な荷重が印加される。すなわち、入力方向に関わらず、基板6の移動量を押圧力に応じた量にできるため、押圧力に応じた略均一な荷重を荷重センサ7に印加することができる。
【0075】
なお、本発明は上記実施の形態の記載に限定されず、本発明の範囲を逸脱しないで適宜変更して実施することができる。例えば、上記実施の形態においては、導電性の金属板で構成される可動接点板5を用いているが、固定接点対612を導通可能であれば可動接点板5を用いなくとも良い。この場合、例えば、ドーム状部42の裏面側を導電ゴムなどで形成することができる。ただし、可動接点板5は、導通時における固定接点対612の電気抵抗を下げることができる点において好適である。
【0076】
また、上記実施の形態において、基板6の上面側に設けられるスイッチとして、固定接点対612と可動接点52とが対向配置され、押圧部33への押圧操作に応じて、可動接点52が固定接点対612と当接することにより、固定接点対612が導通する押圧式のスイッチを採用した場合について説明した。しかしながら、スイッチの構成はこれに限られない。例えば、基板6の表面に複数の導電パターンを形成すると共に、操作部材3の押圧部33への押圧操作に伴って基板6上を摺動する摺動子を操作部材3の下面側に複数設け、押圧部33への押圧操作に応じて、摺動子が対応する導電パターンと接触あるいは離間する摺動式のスイッチであっても良い。さらに、スイッチは、操作部材への操作を行っていない初期状態において、スイッチ(接点間)がオフ状態のノーマルオープンタイプである必要はなく、初期状態ではスイッチがオン状態であり、押圧操作によってオフ状態へと切り替えられるノーマルクローズタイプのスイッチでも構わない。
【0077】
さらに、上記実施の形態においては、基板6の下面(裏面)に荷重センサ7が取り付けられ、基板6の下面側に荷重印加部材(フレーム8)が対向配置される構成としたが、押圧部33への押圧力に対応した荷重を荷重センサ7に印加する構成はこれに限定されない。例えば、基板6の下方側に荷重センサ7を対向させて配置する構成としても良い。すなわち、この場合には、荷重センサ7の検知部(突起部71)が、基板6の下面側を向くように、荷重センサ7を基板6と分離した状態で設ける。そして、操作部材3の押圧部33への押圧操作に伴って、基板6が下方側(荷重センサ側)へ移動すると、基板6の下面が荷重センサ7(突起部71)と当接して突起部71を押圧し、これにより、押圧部33への押圧力に対応した荷重が荷重センサ7に印加されるように構成することも可能である。なお、このように構成した場合には、基板6の下面(裏面)が、荷重センサ7へ荷重を印加する荷重印加部材として機能する。
【0078】
また、上記実施の形態において、4個の押圧部33(33a〜33d)が略90°の間隔で配置された構成を採用しているが、押圧部33の数及び配置間隔はこれに限られない。例えば、2個の押圧部33を180°の間隔で、或いは、3個の押圧部33を120°の間隔で配置して用いても良い。
【0079】
また、上記実施の形態において、スペーサ部材9を基板6が移動する際のガイドとしているが、ケース2の基部21の内壁部(内周面)で基板6の外形を上下方向に移動可能にガイドする構成でも良い。
【符号の説明】
【0080】
1 多方向入力装置
2 ケース
3 操作部材
4 ラバー部材
5 可動接点板
6 基板
7 荷重センサ
8 フレーム
9 スペーサ部材
21 基部
22 規制部
23 開口部
24、24a〜24d 係合溝
25 係止部
31 十字操作部
32 延出部
33、33a〜33d 押圧部
34 連結部
35 凹部
41 開口部
42、42a〜42d ドーム状部
43、43a〜43c 位置決め片
51、51a、51b 開口部
52、52a〜52d 可動接点
53、53a〜53d 開口部
54a〜54d 溝部
55、55a、55b 切り欠き部
61 固定接点形成部
62 端子形成部
71 突起部
81 円板形状部
82、82a〜82c 付勢片
83、83a〜83d 係合片
84、84a〜84c 開口部
85a〜85c 連結部
86 円環形状部
91 平面部
92 凸部
93a〜93d 脚部
94a〜94d 突出部
611、611a〜611d 開口部
612、612a〜612d 固定接点対
613、613a〜613c 切り欠き部
621a〜621e 接続端子
811、811a〜811d スリット
812a 直線形状部
812b 円弧形状部
813 荷重印加部
814、814a〜814d 腕部
815、815a〜815d 開口部
【技術分野】
【0001】
本発明は、携帯電子機器やゲーム機用コントローラなどにおける方向入力操作に好適な多方向入力装置に関する。
【背景技術】
【0002】
従来、感圧導電ゴムにおける内部抵抗を変化させることで方向入力操作を検出する多方向入力装置が提案されている(例えば、特許文献1参照)。この多方向入力装置においては、各一対の電極で構成される4組の接点電極が基板上に90°間隔で形成されており、各接点電極上には感圧導電ゴムがそれぞれ配置されている。また、操作レバーが傾倒すると、傾倒方向の感圧導電ゴムが押圧されるように構成されている。感圧導電ゴムが押圧されると押圧量に応じて感圧導電ゴムの内部抵抗が減少するため、方向入力操作をアナログ的に検出できる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−278695号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述したような従来の多方向入力装置は、特性のばらつきやすい感圧導電ゴムを複数用いていることから、レバーの傾倒量が同じでも各接点電極を構成する電極間の抵抗値にばらつきが生じてしまう。このため、操作方向によって出力がばらつき、所望の荷重検出精度を得ることができないという問題がある。
【0005】
本発明はかかる点に鑑みてなされたものであり、操作方向による荷重検出精度のばらつきを低減した多方向入力装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の多方向入力装置は、表面側に複数の押圧部が等角度間隔に配置される操作部材と、前記操作部材の裏面側に対向配置され、前記押圧部と対応する表面側の位置にスイッチを備える基板と、前記基板の裏面側における前記操作部材の中央に対応する位置に設けられる荷重センサと、前記荷重センサに対して荷重を印加できるように前記基板の裏面側に配置される荷重印加部材と、を備え、前記押圧部に対する所定の押圧力により当該押圧部と対応するスイッチの導通状態が切り替えられると共に、前記基板の移動を伴って、前記荷重印加部材により前記押圧部に対する押圧力に対応する荷重が前記荷重センサに印加されることを特徴とする。
【0007】
この構成によれば、押圧部に対する一定の押圧力により当該押圧部と対応するスイッチの導通状態が切り替えられると共に、基板の初期位置からの移動を伴って、荷重印加部材により押圧部に対する押圧力に対応する荷重が荷重センサに印加されるようになっているため、スイッチの導通状態によって操作方向を検出すると共に、荷重センサによって押圧力に対応する荷重を検出できる。そして、操作方向に依らず荷重を検出する荷重センサが共通であるため、操作方向による荷重検出精度のばらつきを低減できる。
【0008】
本発明の多方向入力装置において、前記荷重センサは、前記基板の裏面に取り付けられ、前記基板は、前記押圧部に対する押圧力に応じて移動可能に前記操作部材と前記荷重印加部材との間に配置されており、前記押圧力により前記基板が初期位置から前記荷重印加部材側に移動し、前記基板と前記荷重印加部材とで前記荷重センサが挟み込まれて前記押圧力に対応する荷重が前記荷重センサに印加されることが好ましい。この構成によれば、押圧力により基板が初期位置から荷重印加部材側に移動し、基板と荷重印加部材とで荷重センサが挟み込まれて押圧力に対応する荷重が荷重センサに印加されるようになっているため、押圧される押圧部が異なる場合でも、押圧力に応じた基板の移動量は略等しくなる。その結果、押圧される押圧部が異なる場合でも、押圧力に応じた略均一な荷重を荷重センサに印加することができるため、荷重センサによって検出される荷重(検出値)のばらつきを低減することができる。
【0009】
本発明の多方向入力装置において、前記荷重印加部材は、前記荷重センサに対応して配置され前記荷重センサに対して荷重を印加する荷重印加部と、前記荷重印加部の外側に配置され前記基板に対して前記操作部材に向かう方向の付勢力を付与する付勢部と、を備えていることが好ましい。この構成によれば、荷重印加部材が荷重印加部と付勢部とを併せ持つため、部品点数を削減して多方向入力装置を小型化できる。
【0010】
本発明の多方向入力装置において、前記荷重印加部は、前記荷重センサに印加される荷重に応じて変形するように構成されていることが好ましい。この構成によれば、印加される荷重に応じて荷重印加部が変形するように構成されているため、荷重センサに過大な荷重が印加されて荷重センサが破損することを防止できる。これにより、多方向入力装置を長寿命化できる。
【0011】
本発明の多方向入力装置において、前記操作部材及び前記基板を収容する筐体を具備し、前記筐体は、前記操作部材の前記押圧部を露出させる開口部が設けられたケースと、前記基板の裏面側に対向配置されると共に前記ケースに一体化されるフレームとを有し、前記フレームによって前記荷重印加部材が構成されていることが好ましい。この構成によれば、荷重印加部材が筐体の一部であるフレームで構成されるので、部品点数の増加を抑制して、多方向入力装置の小型化を図ることができると共に、ケースに対して荷重印加部材を精度良く配置することが可能となる。
【0012】
本発明の多方向入力装置において、一端側が前記荷重印加部材に固定されたスペーサ部材を備え、前記基板は前記スペーサ部材に対して揺動可能に配置されていることが好ましい。この構成によれば、荷重印加部材に固定されたスペーサ部材を、基板が移動する際のガイドとして機能させることができるため、押圧力に応じた適切な荷重を荷重センサに印加することができる。
【0013】
本発明の多方向入力装置において、前記スペーサ部材の他端側に、前記操作部材の中央に対応する部分において前記操作部材と対向する凹部を備え、前記操作部材と前記荷重印加部材との距離を所定以上に保つことが好ましい。この構成によれば、操作部材の中央部分と荷重印加部材との距離が所定以上に保たれているため、スペーサ部材を挟むように配置される複数のスイッチの導通状態が同時に切り替えられることがない。これにより、入力方向の検出エラーを防止できる。
【0014】
本発明の多方向入力装置において、前記スイッチは、前記基板の表面に形成された固定接点対と当該固定接点対に対向配置される可動接点により構成されると共に、前記操作部材と前記基板との間に前記固定接点対に対応するドーム状の弾性部材を備え、前記可動接点を介して前記固定接点対が導通する際に前記弾性部材の変形により所定の触感が得られるように構成されていることが好ましい。この構成によれば、ドーム状の弾性部材によって固定接点対が導通状態になる際に所定の触感が得られるように構成されているため、操作者は、固定接点対が導通状態であることを触感から判別できる。これにより、多方向入力装置の操作感を高めることができる。
【0015】
本発明の多方向入力装置において、前記可動接点は、前記基板と前記弾性部材との間に設けられた金属板によって構成されており、前記押圧部に対する押圧力により当該押圧部に対応する前記弾性部材が変形すると、前記可動接点とこれに対応する前記固定接点対とが接触して前記固定接点対を導通させることが好ましい。この構成によれば、金属板によって固定接点対を導通させるため、導通時における固定接点対の抵抗を下げることができる。
【発明の効果】
【0016】
本発明によれば、操作方向による荷重検出精度のばらつきを低減した多方向入力装置を提供できる。
【図面の簡単な説明】
【0017】
【図1】本実施の形態に係る多方向入力装置の分解斜視図である。
【図2】本実施の形態に係る多方向入力装置の外観を示す斜視図である。
【図3】本実施の形態に係る多方向入力装置の内部構造を示す断面図である。
【図4】本実施の形態に係る多方向入力装置において所定方向の入力操作が行われた状態の断面図である。
【図5】本実施の形態に係る多方向入力装置において強い押圧力で所定方向の入力操作が行われた状態の断面図である。
【図6】本実施の形態に係る多方向入力装置に対して所定方向の入力操作が行われた場合の出力特性を示す特性図である。
【図7】本実施の形態に係る多方向入力装置において操作部材の中央が押圧された状態の断面図である。
【発明を実施するための形態】
【0018】
以下、本発明の一実施の形態について添付図面を参照して詳細に説明する。本実施の形態に係る多方向入力装置は、例えば、携帯電子機器やゲーム機用コントローラなどにおける方向入力操作(押圧入力操作)に用いられるものである。なお、本実施の形態に係る多方向入力装置の用途については、これらに限定されるものではなく適宜変更が可能である。
【0019】
図1は、本実施の形態に係る多方向入力装置1の分解斜視図である。以下においては、説明の便宜上、図1に示す上方側を多方向入力装置1の上方側(表面側)とし、同図に示す下方側を多方向入力装置1の下方側(裏面側)として説明する。
【0020】
図1に示すように、本実施の形態に係る多方向入力装置1は、上方側の筐体を構成するケース2と、操作者からの操作入力を受け付ける操作部材3と、操作部材3への入力に応じて変形するラバー部材4と、ラバー部材4の下方側に配置される可動接点板5と、ラバー部材4及び可動接点板5を支持する基板6と、基板6の裏面に取り付けられる荷重センサ7と、下方側の筐体を構成するフレーム8とを備えている。また、多方向入力装置1は、下端部においてフレーム8に固定されるスペーサ部材9を備えており、筐体内において操作部材3とフレーム8との間隔を所定距離以上に保つことができるように構成されている。
【0021】
ケース2は、例えば、絶縁性の合成樹脂を用いて形成されている。ケース2は、概して円環形状を有する基部21と、この基部21の上面の内周縁部に立設された規制部22とを有している。規制部22は、平面視により概して十字形状を有している。規制部22の上端部は、概して十字形状を有する開口部23を規定している。なお、規制部22は、多方向入力装置1が組み立てられた状態で操作部材3の一定位置以上の上方側への移動を規制する役割を果たす。
【0022】
基部21の外周部には、略等間隔に複数(本実施の形態では4個)の係合溝24(24a〜24d)が設けられている。これらの係合溝24は、基部21の外周面から上面にかけて形成されている。ケース2の下面には、基部21の下端部より僅かに上方側の位置に係止部25が設けられている(図1に不図示、図3参照)。係止部25は、平坦面で構成され、詳細について後述するように、基板6の上面を係止する。なお、ケース2の下方は開放されており、基板6を配置可能となっている。また、基部21の一部には、後述する基板6の端子形成部62を突出させるための切り欠き部が形成されている。
【0023】
操作部材3は、例えば、絶縁性の合成樹脂を用いて形成されている。操作部材3は、平面視により概して十字形状を有する十字操作部31と、この十字操作部31の下端部から外側に延出した延出部32とを有している。十字操作部31の外形寸法は、ケース2の開口部23を通過可能な寸法に設けられ、多方向入力装置1が組み立てられた状態で開口部23からその一部が露出する。延出部32は、ケース2の開口部23を規定する規制部22の内壁面(天井面)と当接する寸法に設けられている。
【0024】
十字操作部31は、複数(本実施の形態では4個)の押圧部33(33a〜33d)と、これらの押圧部33を連結する連結部34とから構成される。押圧部33a〜33dは、略等角度間隔(90°間隔)に配置されている。連結部34の上面(表面)には、円形状の凹部が設けられている。これらの押圧部33(33a〜33d)及び連結部34の上面で操作部材3の押圧領域が構成される。十字操作部31の下面(裏面)は、概して平坦面で構成されている。十字操作部31の下面のうち、連結部34に対応する位置には、円形状の凹部35が設けられている(図1に不図示、図3参照)。
【0025】
ラバー部材4は、合成ゴムなどの弾性材料を用いて形成されている。ラバー部材4は、概して円板形状を有しており、その中央には開口部41が設けられている。開口部41は、概して正方形状を有すると共にそれぞれの角部に半円形状が付加された形状を有している。ラバー部材4の上面であって開口部41の外側には、複数(本実施の形態では4個)のドーム状部42(42a〜42d)が設けられている。これらのドーム状部42a〜42dは、弾性部材を構成するものであり、略等角度間隔に設けられている。ドーム状部42a〜42dは、押圧部33a〜33dに対応する位置に配置されている。
【0026】
これらのドーム状部42a〜42dは、上面に平面部421aを有する円柱形状部421と、この円柱形状部421の下端部に連続して設けられたスカート部422とを有している。円柱形状部421の下面には、後述する可動接点52(52a〜52d)を押圧する突出部423が設けられている(図1に不図示、図3参照)。ドーム状部42は、平面部421aに下向きの力が掛かると、スカート部422が反転して円柱形状部421が下方側に移動可能に構成されている。
【0027】
なお、本実施の形態において、ドーム状部42a〜42dは、ラバー部材4と一体に構成する場合について説明しているが、ドーム状部42a〜42dの構成については、これに限定されるものではなく適宜変更が可能である。例えば、ドーム状部42a〜42dをラバー部材4とは別部材で構成し、ラバー部材4に形成された開口部にこれらを配設しても良い。なお、この場合には、ラバー部材4の材質とドーム状部42a〜42dの材質は、必ずしも共通のものでなくても良い。
【0028】
また、ラバー部材4の外周縁部には、複数(本実施の形態では3個)の位置決め片43(43a〜43c)が設けられている。これらの位置決め片43a〜43cは、概して円柱形状を有し、ラバー部材4の外周縁部の下面から下方側に突出して設けられている。これらの位置決め片43a〜43cは、基板6に対してラバー部材4及び可動接点板5を位置決めする役割を果たす。
【0029】
可動接点板5は、導電性を有する金属板に打ち抜き加工及びプレス加工を施して形成されている。可動接点板5は、一部が欠落した概して円板形状を有しており、その中央部分を含む位置には開口部51が設けられている。開口部51は、角部が丸みを帯びた矩形状の開口部51aと、この開口部51aの一つの角部から可動接点板5の外周方向に延在するように設けられた開口部51bとが連結された形状を有している。これにより、可動接点板5は、平面視により概してC字形状になっている。
【0030】
開口部51aの外側には複数(本実施の形態では4個)の可動接点52(52a〜52d)が略等角度間隔に設けられている。可動接点52a〜52dは、ドーム状部42a〜42dに対応する位置に配置されている。例えば、可動接点52(52a〜52d)は、概して円形状の開口部53(53a〜53d)に配置された舌片で構成される。可動接点52を構成する舌片においては、基端部が開口部53を規定する外周縁部に接続され、先端部が基端部から僅かに上方側に延出して設けられている。舌片の先端部は、開口部53の中央であって可動接点板5の表面よりも僅かに上方側の位置に配置され、上方側からの押圧力により下方側に移動する一方、押圧力の解除により初期位置に復帰可能に構成されている。
【0031】
可動接点52a〜52dが配置される開口部53a〜53dは、それぞれ同一方向(図1に示す左方側)に延在する溝部54a〜54dと接続されている。これらの溝部54a〜54dには、多方向入力装置1が組み立てられた状態(基板6上に可動接点板5が配置された状態)において、基板6の上面に形成される配線パターンの一部が収容される。
【0032】
可動接点板5の外周縁部には、複数(本実施の形態では2個)の切り欠き部55(55a、55b)が形成されている。これらの切り欠き部55a、55bは、ラバー部材4の位置決め片43a、43bに対応する位置に配置されている。多方向入力装置1が組み立てられた状態において、切り欠き部55a、55bは、ラバー部材4の位置決め片43a、43bを収容可能な寸法に構成されている。
【0033】
基板6は、表面(上面)に導電性の材料による接点パターン及び配線パターンが形成された絶縁性の板状部材で構成される。基板6は、概して円板形状を有する固定接点形成部61と、この固定接点形成部61の一部の外周縁部から側方側(図1に示す左方側)に突出して形成された概して矩形状の端子形成部62とを含んで構成される。基板6は、概して均一な板厚を有する板状部材で構成される。固定接点形成部61及び端子形成部62の下面には、平面部が形成される。
【0034】
固定接点形成部61の中央には、複数(本実施の形態では4個)の開口部611(611a〜611d)が設けられている。これらの開口部611は、円形状を有しており、後述するスペーサ部材9の脚部93(93a〜93d)を収容可能に構成されている。開口部611a〜611dの外側には、複数組(本実施の形態では4組)の固定接点対612(612a〜612d)が略等角度間隔に設けられている。これらの固定接点対612a〜612dは、可動接点板5の可動接点52a〜52dに対応する位置に配置されている。固定接点対612a〜612dは、それぞれ概して円形状を有する内側接点と、この内側接点の外側であって一部を除く全周に配置された外側接点とにより構成されている。これらの内側接点及び外側接点により接点パターンが構成される。また、固定接点対612a〜612dとこれらの固定接点対612a〜612dとそれぞれ対向して配置される可動接点52a〜52dとによって、複数(本実施の形態では4つ)の押圧式のスイッチが構成されている。
【0035】
固定接点対612a〜612dの内側接点は、それぞれ端子形成部62に形成された接続端子621a〜621dに電気的に接続されている。一方、固定接点対612a〜612dの全ての外側接点は、互いに電気的に接続されると共に、接続端子621eと電気的に接続されている。固定接点対612a〜612dの内側接点と接続端子621a〜621dとの間、固定接点対612a〜612d間、並びに、固定接点対612a〜612dと接続端子621eとの間には、配線パターンが設けられている。これらの配線パターンにより、それぞれが電気的に接続される。基板6の裏面(下面)は、図示しないが、後述する荷重センサ7の図示しない配線パターンを介して、端子形成部62の下面に設けられた接続端子(不図示)と電気的に接続されている。
【0036】
基板6を構成する固定接点形成部61の外周縁部には、複数(本実施の形態では3個)の切り欠き部613(613a〜613c)が形成されている。これらの切り欠き部613a〜613cは、ラバー部材4の位置決め片43a〜43cに対応する位置に配置されている。多方向入力装置1が組み立てられた状態において、切り欠き部613a〜613cは、ラバー部材4の位置決め片43a〜43cを収容可能な寸法に構成されている。
【0037】
荷重センサ7は、上下方向の荷重を検出可能な圧電素子等のセンサ素子で構成される。荷重センサ7は、概して扁平な直方体形状を有しており、その上面に平坦面が設けられている。荷重センサ7は、その上面を基板6の下面(平坦面)に対して接着等により固定される。荷重センサ7は、基板6の下面の中央部において4個の開口部611a〜611dの内側の領域に固定される。荷重センサ7の下面には、下方側に突出した突起部71が設けられている(図1に不図示、図3参照)。荷重センサ7は、この突起部71に印加される上下方向の荷重を検出できるように構成されている。荷重センサ7には、図示省略しているが、検出した荷重に基づく信号を出力するための複数の端子(電極)が設けられており、これらの端子は基板6のランド部に半田付けにより接続されている。
【0038】
フレーム8は、荷重印加部材を構成するものであり、所定の弾性力が得られる金属板に打ち抜き加工及びプレス加工を施して形成されている。フレーム8は、概して円板形状を有しており、その中央に配置された円板形状部81と、この円板形状部81の外側に配置された複数(本実施の形態では3個)の付勢片82(82a〜82c)と、フレーム8の外周縁部から上方側に延出する複数(本実施の形態では4個)の係合片83(83a〜83d)とを含んで構成されている。
【0039】
円板形状部81には、複数(本実施の形態では4個)のスリット811(811a〜811d)が形成されている。これらのスリット811a〜811dは、円板形状部81の周方向に並べて配置されている。それぞれのスリット811は、円板形状部81の径方向に延在する2本の直線形状部812aと、これらの直線形状部812aの内側の端部を接続する円弧形状部812bとから構成される。
【0040】
これらのスリット811a〜811dの中央には、円板形状を有する荷重印加部813が設けられている。この荷重印加部813は、スリット811a〜811dを構成する円弧形状部812bの内側に配置される。なお、スリット811a〜811dを構成する直線形状部812aは、荷重印加部813の外周縁部から円板形状部81の径方向の中央近傍まで延在して形成されている。
【0041】
隣接するスリット811の直線形状部812aの間(たとえば、スリット811aの直線形状部812aと、スリット811bの直線形状部812aとの間)には、荷重印加部813の外周縁部に接続される複数(本実施の形態では4本)の腕部814(814a〜814d)が設けられている。すなわち、荷重印加部813は、円板形状部81の外周縁部近傍に4本の腕部814a〜814dを介して連結される構成を採る。このため、荷重印加部81は、上方側から印加される荷重に応じて僅かに下方側に撓むように構成される。
【0042】
また、荷重印加部813の外側であって、それぞれのスリット811を構成する直線形状部812aの内側の位置(言い換えると、隣接する腕部814a〜814dの間の位置)には、円形状の開口部815(815a〜815d)が形成されている。これらの開口部815a〜815dは、後述するスペーサ部材9の脚部93(93a〜93d)の下端部を固定する役割を果たす。
【0043】
付勢片82(82a〜82c)は、付勢部を構成するものであり、円板形状部81を規定する円弧状の開口部84(84a〜84c)内に設けられている。なお、円板形状部81は、これらの開口部84a〜84cの間に配置される連結部85a〜85cで、フレーム8の外周縁部に配置された円環形状部86と連結されている。付勢片82a〜82cは、それぞれ連結部85a〜85cの側面(端面)に接続して設けられている。付勢片82a〜82cの先端部は、開口部84a〜84cに沿って円弧状に延在すると共に、僅かに上方側に延出して設けられている。すなわち、付勢片82a〜82cの先端部は、フレーム8の表面よりも僅かに上方側の位置に配置され、上方側からの押圧力により下方側に移動する一方、押圧力の解除により初期位置に復帰可能に構成されている。
【0044】
係合片83(83a〜83d)は、フレーム8(円環形状部86)の外周縁部に略等間隔に設けられている。係合片83a〜83dは、ケース2の係合溝24a〜24dに配置されると共に、係合溝24a〜24dの上方側に配置される部分が内側(基部21の上面側)に折り曲げられることで、ケース2とフレーム8とを固定する。すなわち、フレーム8はケース2の開放された下方側を塞ぐようにケース2に取り付けられて、筐体を構成するケース2とフレーム8とが一体化される。なお、図1においては、ケース2の基部21の上面側に折り曲げられた状態の係合片83(83a〜83d)について示している。
【0045】
スペーサ部材9は、略矩形状の平面部91と、平面部91の上側中央部に設けられた凸部92と、平面部91の角部に相当する位置において平面部91から下方側に延びる複数(本実施の形態では4本)の脚部93a〜93dとを含んで構成されている。スペーサ部材9は、このような構成を有し、操作部材3とフレーム8との間隔(より具体的には、操作部材3の中央部とフレーム8との間隔)を所定距離以上に保つ支持部材として機能する。
【0046】
凸部92は、支持部を構成するものであり、上端部が球面形状に設けられている。脚部93a〜93dは、概して円柱形状を有しており、その下端部には、半球形状の突出部94a〜94d(図1において、突出部94c、94dは不図示)が設けられている。スペーサ部材9は、ラバー部材4に形成された開口部41、並びに、可動接点板5の開口部51aを通過可能な寸法に設けられている。また、脚部93a〜93dは、基板6に形成された開口部611a〜611dを挿通可能な寸法に設けられている。すなわち、脚部93a〜93dの外周面は、開口部611a〜611dの径より僅かに小径に設けられている。さらに、突出部94a〜94dは、フレーム8の円板形状部81に形成された開口部815a〜815dに係合可能な寸法に設けられている。
【0047】
図2は、本実施の形態に係る多方向入力装置1の外観を示す斜視図であり、図3は、本実施の形態に係る多方向入力装置1の内部構造を示す断面図である。なお、図2及び図3においては、操作部材3で押圧操作を受けていない状態(初期状態)の多方向入力装置1を示している。
【0048】
図2に示すように、組み立て後の多方向入力装置1は、概して円盤形状を有している。ケース2及びフレーム8により構成される筐体には、上述した操作部材3、ラバー部材4、可動接点板5、基板6、荷重センサ7及びスペーサ部材9が収容されている。これらの構成部品を収容した状態でフレーム8の係合片83a〜83dをケース2の係合溝24a〜24dと係合させることで、ケース2とフレーム8とが固定されている。基板6の端子形成部62は、ケース2の基部21から側方側に突出している。端子形成部62の上面に設けられた接続端子621a〜621eが露出すると共に、端子形成部62の下面には、荷重センサ7に導通される図示しない接続端子が露出し、多方向入力装置1が搭載される機器のコネクタ等に接続される。
【0049】
多方向入力装置1の内部においては、図3に示すように、ケース2及びフレーム8の間に形成される空間を上下に仕切る位置に基板6が配置される。基板6の下方側の空間に荷重センサ7が配設される一方、基板6の上方側の空間にラバー部材4、可動接点板5及び操作部材3が配設される。なお、操作部材3は、その上端部(十字操作部31の上端部)がケース2の開口部23から露出するように基板6の上方側の空間に配設されている。
【0050】
基板6は、フレーム8に設けられた付勢片82a〜82cによって上向きに付勢されている。付勢片82a〜82cの付勢力により、基板6は、初期状態(押圧入力操作が行われていない状態)においてケース2の内壁に設けられた係止部25に押し付けられている。係止部25は、フレーム8の表面から一定の間隔を空けて設けられているため、初期状態において、基板6の表面とフレーム8の表面とは略平行な状態に保たれている。
【0051】
荷重センサ7は、下面に設けられた突起部71がフレーム8(より具体的には荷重印加部813)の上面と接触しないように基板6の裏面側中央に取り付けられている。つまり、初期状態において、突起部71と荷重印加部813とは接触しておらず、荷重センサ7には荷重が印加されていない。
【0052】
基板6の上面には、可動接点板5を介してラバー部材4が配置されている。ラバー部材4は、可動接点板5を挟んだ状態で基板6の上面に載置される。ラバー部材4は、位置決め片43a〜43cを、可動接点板5の切り欠き部55a、55b、並びに、基板6の切り欠き部613a〜613cに挿通した状態で基板6の上面に載置される。このように位置決め片43a〜43cで位置決めした状態でラバー部材4及び可動接点板5が基板6上に配置されるので、基板6上の所望の位置に可動接点板5及びラバー部材4が配置されるように構成されている。
【0053】
ラバー部材4のドーム状部42(42a〜42d)は、スカート部422の下端部が基板6の表面に接触する一方、円柱形状部421の下面に設けられた突出部423が基板6の表面から一定距離だけ離間した状態で配置される。この突出部423に対応する位置に可動接点板5に形成された可動接点52(52a〜52d)が配置される。また、可動接点52(52a〜52d)に対応する基板6上の位置に固定接点対612(612a〜612d)の内側接点が配置される。なお、固定接点対612(612a〜612d)の外側接点は、可動接点板5の開口部53(53a〜53d)を規定する部分に接触する位置に配置される。初期状態において、円柱形状部421の下面に設けられた突出部423は、可動接点52(52a〜52d)と離間した状態である。また、可動接点52(52a〜52d)は、固定接点対612(612a〜612d)の内側接点と離間した状態である。なお、ドーム状部42a〜42dの上面に設けられた平面部421aは、同一平面上に配置された状態となっている。
【0054】
操作部材3は、ドーム状部42a〜42dの平面部421aに載置されている。すなわち、操作部材3は、ドーム状部42a〜42d(より具体的には、平面部421a)によって下面を支持されている。操作部材3の十字操作部31の下端部に設けられた延出部32は、ケース2の開口部23よりも側方側の位置まで延出している。操作部材3は、ケース2の規制部22に対する延出部32の当接により一定位置以上の上方側への移動が規制されている。
【0055】
スペーサ部材9は、平面部91がラバー部材4の開口部41に収容されると共に、脚部93(93a〜93d)が基板6の開口部611(611a〜611d)に挿通された状態で配置される。開口部611(611a〜611d)は、脚部93(93a〜93d)の外周寸法よりも大径にも設けられていることから、基板6は、これらの脚部93(93a〜93d)にガイドされて上下方向に移動可能に構成される。脚部93(93a〜93d)の下端部に設けられた突出部94(94a〜94d)は、フレーム8の開口部815(815a〜815d)に圧入により係合(固定)している。平面部91の上面に設けられた凸部92は、操作部材3の下面に設けられた凹部35と離間状態で対向して配置される。初期状態において、凸部92の上端部は、ドーム状部42(42a〜42d)の平面部421aが配置される同一平面よりも下方側の位置に配置されている。
【0056】
図3に示すように、初期状態において、可動接点52(52a〜52d)は、固定接点対612(612a〜612d)の内側接点と離間した状態になっている。このため、接続端子621a〜621dと接続端子621eとの間はいずれも高抵抗状態(非導通状態)となっている。すなわち、可動接点52と固定接点対612とで構成されるスイッチは、いずれもオフ状態(非導通状態)となっている。一方、操作者の押圧入力操作により可動接点52(52a〜52d)が押し下げられると、対応する固定接点対612(612a〜612d)の内側接点に可動接点52(52a〜52d)が接触して内側接点と可動接点板5とが導通する。可動接点板5は、予め外側接点と接触(導通)しているから、これによって対応する固定接点対612(612a〜612d)が導通する。すなわち、対応するスイッチがオフ状態(非導通状態)からオン状態(導通状態)へと切り替えられる。これにより、押し下げられた可動接点52(52a〜52d)に対応する接続端子621(621a〜621d)と、接続端子621eとの間の電気抵抗が低下する。本実施の形態に係る多方向入力装置1においては、操作者の押圧入力操作によって生じる接続端子621a〜621dと接続端子621eとの間の電気抵抗(導通状態)の変化を利用することで、押圧入力操作による入力方向を検出可能に構成されている。すなわち、本実施の形態に係る多方向入力装置1においては、可動接点52a〜52d及び固定接点対612a〜612dにより、入力方向を検出する方向センサを構成している。
【0057】
そして、方向センサが入力方向を検出している状態、すなわち、操作者の押圧入力操作により固定接点対612a〜612dのいずれかが導通している状態において、さらに高い押圧力で操作部材3が押圧されると、基板6が脚部93a〜93dに沿って下方に移動する。荷重センサ7は、基板6の裏面に取り付けられているため、基板6が下方に移動すると、荷重センサ7の突起部71とフレーム8の荷重印加部813とが接触して荷重センサ7に荷重が印加される。荷重センサ7に印加される荷重は、押圧力に対応する大きさである。これにより、入力方向を検出している状態において、操作者の押圧入力操作における押圧力を検出できる。つまり、入力方向に加え、入力に係る押圧力の強度を検出することができる。
【0058】
次に、本実施の形態に係る多方向入力装置1に対して押圧入力操作が行われた状態について説明する。ここでは、一例として押圧部33dが押圧された状態について説明するが、他の押圧部33が押圧される場合も同様である。
【0059】
図4は、所定方向の入力操作が行われた状態(第1の入力状態)の断面図である。図3に示す状態において一定の押圧力で押圧部33dを押圧すると、図4に示すように、操作部材3の押圧部33d側が押し下げられる。これによって、対応するドーム状部42dのスカート部422が反転する。同時にドーム状部42dの突出部423を介して可動接点52dが押圧されて、可動接点52dと固定接点対612dの内側接点とが接触する。その結果、固定接点対612dが導通状態となって入力方向が検出される。具体的には、方向センサは、固定接点対612dに対応する方向において所定値(図6のOD_1参照)を出力し、他の方向において初期値(図6のOD_0参照)を出力する。
【0060】
また、操作部材3の押圧部33d側が押し下げられることで、ドーム状部42d及び可動接点52dを介して基板6が押し下げられ、荷重センサ7(突起部71)とフレーム8(荷重印加部813)とが接触する。この状態において、荷重センサ7には小さな荷重が印加されている。その結果、荷重センサ7の出力は、初期値から僅かに変化した所定値(図6のOL_1参照)となる。このため、この状態においては所定の押圧力(第1の押圧力)が検出される。なお、ドーム状部42dはスカート部422が反転する際に所定の触感(クリック感)が得られるように構成されており、操作者は、得られる触感から多方向入力装置1が入力状態にあることを判別できようになっている。このようにドーム状部42を構成することにより、多方向入力装置1における入力の操作感を高めることができる。
【0061】
図5は、より強い押圧力で入力操作が行われた状態(第2の入力状態)の断面図である。図4に示す状態からさらに強い力で押圧部33dを押圧すると、図5に示すように、操作部材3の押圧部33d側がさらに押し下げられる。この状態において、既にドーム状部42dのスカート部422は反転しているため、ドーム状部42d及び可動接点52dの状態は変わらない。すなわち、固定接点対612dは導通状態であり、入力方向は検出され続けている。方向センサは、固定接点対612dに対応する方向において所定値(OD_1)を出力し、他の方向において初期値(OD_0)を出力している。
【0062】
一方、操作部材3の押圧部33d側は図4に示す状態からさらに押し下げられるため、これに応じて基板6はさらに押し下げられる。その結果、突起部71は荷重印加部813によって強く押圧されて、荷重センサ7にはより大きな荷重が印加される。荷重センサ7に印加される荷重は第1の入力状態より大きくなり、荷重センサ7の出力は所定値(図6のOL_2参照)となる。これにより、所定の押圧力(第2の押圧力)が検出される。なお、押圧部33dが押し下げられ、図3に示す初期状態から図5に示す状態に至る際に、押圧された押圧部33dと操作部材3の中央部を挟んで対向する位置にある延出部32は、ケース2の規制部22の天井面と当接する。そして、この当接箇所を支点として操作部材3は傾き、この傾き動作に伴って基板6が傾くことにより、押圧された押圧部33d側の基板6が確実に押し下げられるものとなっている。
【0063】
なお、荷重センサ7は、基板6とフレーム8(荷重印加部813)とで挟み込まれることで荷重が印加されるように構成されている。これにより、押圧される押圧部が異なる場合でも、押圧力に応じた略均一な荷重が印加されるため、荷重検出精度を高めることができる。また、荷重印加部813は板ばね状になっており、荷重センサ7に大きな荷重が印加されると、その荷重に応じて下方側に変形するように構成されている。これにより、荷重センサ7に印加される荷重が緩和される。
【0064】
図6は、上述した入力操作が行われた場合の多方向入力装置1の出力特性を示す特性図である。図6は、徐々に押圧力を大きくする場合の出力特性を示す。縦軸はセンサ出力を表し、横軸は時間を表す。図6に示すように、いずれかの押圧部33に所定(しきい値)以上の押圧力が掛かるまで固定接点対612は導通しない(初期状態〜第1の入力状態)。この状態において、方向センサの出力はいずれの方向においても初期値(OD_0)であるから、入力方向は検出されない。一方、第1の入力状態の直前において、基板6は僅かに押し下げられて荷重センサ7とフレーム8とは接触する。この状態では、荷重センサ7の出力は初期値(OL_0)と所定値(OL_1)との間の値になる。ただし、このように入力方向が検出されない状態(初期状態〜第1の入力状態)において、荷重センサ7の出力は押圧力の検出に用いられない。
【0065】
次に、上述の押圧部33に所定(しきい値)の押圧力が掛かると、対応するドーム状部42のスカート部422が反転して固定接点対612が導通する(第1の入力状態)。これにより、方向センサにおいて対応する方向の出力が所定値(OD_1)となり、入力方向が検出される。また、この状態において、荷重センサ7の出力は所定値(OL_1)となる。このため、方向センサの出力と荷重センサ7の出力とから、所定方向の小さな荷重が検出される。
【0066】
その後、上述の押圧部33にさらに大きな押圧力が掛かると、基板6はさらに下方に移動して荷重センサ7に大きな荷重が印加される(第2の入力状態)。この状態において、対応する方向センサの出力は所定値(OD_1)である。また、荷重センサ7の出力は所定値(OL_2)となる。このため、方向センサの出力と荷重センサ7の出力とから、所定方向の大きな荷重が検出される。
【0067】
なお、以上の説明では便宜上、1個の押圧部33を押圧する場合について説明したが、隣接する2個の押圧部33(例えば、押圧部33a、33b)を押圧する場合も同様である。隣接する2個の押圧部33を押圧する場合、それら2個の押圧部33により決定される方向(例えば、斜め方向)と、これらの押圧部33に印加される押圧力(荷重)を検出することができる。
【0068】
次に、操作部材3の中央(連結部34)が押圧された場合について説明する。図7は、十字操作部31の中央(連結部34)が押圧された状態の断面図である。図7に示すように、十字操作部31の中央が押圧されると、操作部材3全体が下方側(ケース2の内部側)に移動する。一定位置まで操作部材3が移動すると、操作部材3の凹部35とスペーサ部材9の凸部92とが接触した状態となる。この状態においては、複数のドーム状部42のスカート部422は撓んでいるが、いずれも反転することはない。このため、可動接点52は固定接点対612の内側接点と接触しておらず、いずれの固定接点対612も導通していない状態で維持される。このように、操作部材3の中央が押圧された場合でも、操作部材3(凹部35)がスペーサ部材9(凸部92)によって支持されるため、対角に位置する複数の固定接点対612が同時に導通状態になることはない。これにより、入力方向の検出エラーを防止できる。なお、対角に位置する複数の押圧部33が押圧される場合も同様である。
【0069】
以上のように、本実施の形態に係る多方向入力装置1においては、操作部材3の押圧部33に対する一定の押圧力により、その押圧部33と対応する固定接点対612が導通すると共に、フレーム8に設けられた荷重印加部813により押圧部33に対する押圧力に対応する荷重が荷重センサ7に印加されるようになっているため、固定接点対612の導通によって操作方向を検出すると共に、荷重センサ7によって押圧力に対応する荷重を検出することが可能となる。
【0070】
特に、本実施の形態に係る多方向入力装置1においては、十字操作部31の中央部(連結部34)に対応する位置に荷重センサ7を配置することで、1個の荷重センサ7で全入力方向の荷重を検出できる。つまり、各方向の荷重を検出する荷重センサ7を共通化できるため、操作方向による荷重検出精度のばらつきを低減することが可能となる。しかも、荷重センサ7を共通化することにより、アナログポートが1系統で済むため、多方向入力装置1に接続される信号処理回路の構成を簡略化することが可能となる。
【0071】
また、本実施の形態に係る多方向入力装置1において、荷重印加部813は印加される荷重に応じて変形する(より具体的には下方側に退避する)ように構成されているため、荷重センサ7に過大な荷重が印加されることを防止できる。これにより、荷重センサ7の破損等の不具合を防止でき、多方向入力装置1を長寿命化することが可能となる。
【0072】
また、本実施の形態に係る多方向入力装置1において、フレーム8は、板ばね状の荷重印加部813と付勢片82とを一体に備えている。このため、これらを別体で設ける場合と比較して部品点数を削減することができ、多方向入力装置1を小型化することが可能となる。
【0073】
また、本実施の形態に係る多方向入力装置1においては、荷重印加部材を筐体であるフレーム8により構成しているので、別途、荷重印加部材を筐体内に設ける必要はなく、部品点数の増加を抑制して、多方向入力装置1の小型化を図ることができる。また、荷重印加部材は、直接、ケース2に取り付けられるので、ケース2に対する荷重印加部材の上下方向における位置精度(高さ位置精度)が高められ、個々の多方向入力装置1において、荷重印加部材の取付精度に起因する検出特性のばらつきを低減することが可能となる。
【0074】
さらに、本実施の形態に係る多方向入力装置1において、スペーサ部材9を、基板6が上下方向に移動する際のガイドとして機能させることができるため、荷重センサ7には押圧力に応じた適切な荷重が印加される。すなわち、入力方向に関わらず、基板6の移動量を押圧力に応じた量にできるため、押圧力に応じた略均一な荷重を荷重センサ7に印加することができる。
【0075】
なお、本発明は上記実施の形態の記載に限定されず、本発明の範囲を逸脱しないで適宜変更して実施することができる。例えば、上記実施の形態においては、導電性の金属板で構成される可動接点板5を用いているが、固定接点対612を導通可能であれば可動接点板5を用いなくとも良い。この場合、例えば、ドーム状部42の裏面側を導電ゴムなどで形成することができる。ただし、可動接点板5は、導通時における固定接点対612の電気抵抗を下げることができる点において好適である。
【0076】
また、上記実施の形態において、基板6の上面側に設けられるスイッチとして、固定接点対612と可動接点52とが対向配置され、押圧部33への押圧操作に応じて、可動接点52が固定接点対612と当接することにより、固定接点対612が導通する押圧式のスイッチを採用した場合について説明した。しかしながら、スイッチの構成はこれに限られない。例えば、基板6の表面に複数の導電パターンを形成すると共に、操作部材3の押圧部33への押圧操作に伴って基板6上を摺動する摺動子を操作部材3の下面側に複数設け、押圧部33への押圧操作に応じて、摺動子が対応する導電パターンと接触あるいは離間する摺動式のスイッチであっても良い。さらに、スイッチは、操作部材への操作を行っていない初期状態において、スイッチ(接点間)がオフ状態のノーマルオープンタイプである必要はなく、初期状態ではスイッチがオン状態であり、押圧操作によってオフ状態へと切り替えられるノーマルクローズタイプのスイッチでも構わない。
【0077】
さらに、上記実施の形態においては、基板6の下面(裏面)に荷重センサ7が取り付けられ、基板6の下面側に荷重印加部材(フレーム8)が対向配置される構成としたが、押圧部33への押圧力に対応した荷重を荷重センサ7に印加する構成はこれに限定されない。例えば、基板6の下方側に荷重センサ7を対向させて配置する構成としても良い。すなわち、この場合には、荷重センサ7の検知部(突起部71)が、基板6の下面側を向くように、荷重センサ7を基板6と分離した状態で設ける。そして、操作部材3の押圧部33への押圧操作に伴って、基板6が下方側(荷重センサ側)へ移動すると、基板6の下面が荷重センサ7(突起部71)と当接して突起部71を押圧し、これにより、押圧部33への押圧力に対応した荷重が荷重センサ7に印加されるように構成することも可能である。なお、このように構成した場合には、基板6の下面(裏面)が、荷重センサ7へ荷重を印加する荷重印加部材として機能する。
【0078】
また、上記実施の形態において、4個の押圧部33(33a〜33d)が略90°の間隔で配置された構成を採用しているが、押圧部33の数及び配置間隔はこれに限られない。例えば、2個の押圧部33を180°の間隔で、或いは、3個の押圧部33を120°の間隔で配置して用いても良い。
【0079】
また、上記実施の形態において、スペーサ部材9を基板6が移動する際のガイドとしているが、ケース2の基部21の内壁部(内周面)で基板6の外形を上下方向に移動可能にガイドする構成でも良い。
【符号の説明】
【0080】
1 多方向入力装置
2 ケース
3 操作部材
4 ラバー部材
5 可動接点板
6 基板
7 荷重センサ
8 フレーム
9 スペーサ部材
21 基部
22 規制部
23 開口部
24、24a〜24d 係合溝
25 係止部
31 十字操作部
32 延出部
33、33a〜33d 押圧部
34 連結部
35 凹部
41 開口部
42、42a〜42d ドーム状部
43、43a〜43c 位置決め片
51、51a、51b 開口部
52、52a〜52d 可動接点
53、53a〜53d 開口部
54a〜54d 溝部
55、55a、55b 切り欠き部
61 固定接点形成部
62 端子形成部
71 突起部
81 円板形状部
82、82a〜82c 付勢片
83、83a〜83d 係合片
84、84a〜84c 開口部
85a〜85c 連結部
86 円環形状部
91 平面部
92 凸部
93a〜93d 脚部
94a〜94d 突出部
611、611a〜611d 開口部
612、612a〜612d 固定接点対
613、613a〜613c 切り欠き部
621a〜621e 接続端子
811、811a〜811d スリット
812a 直線形状部
812b 円弧形状部
813 荷重印加部
814、814a〜814d 腕部
815、815a〜815d 開口部
【特許請求の範囲】
【請求項1】
表面側に複数の押圧部が等角度間隔に配置される操作部材と、前記操作部材の裏面側に対向配置され、前記押圧部と対応する表面側の位置にスイッチを備える基板と、前記基板の裏面側における前記操作部材の中央に対応する位置に設けられる荷重センサと、前記荷重センサに対して荷重を印加できるように前記基板の裏面側に配置される荷重印加部材と、を備え、
前記押圧部に対する所定の押圧力により当該押圧部と対応するスイッチの導通状態が切り替えられると共に、前記基板の移動を伴って、前記荷重印加部材により前記押圧部に対する押圧力に対応する荷重が前記荷重センサに印加されることを特徴とする多方向入力装置。
【請求項2】
前記荷重センサは、前記基板の裏面に取り付けられ、前記基板は、前記押圧部に対する押圧力に応じて移動可能に前記操作部材と前記荷重印加部材との間に配置されており、前記押圧力により前記基板が初期位置から前記荷重印加部材側に移動し、前記基板と前記荷重印加部材とで前記荷重センサが挟み込まれて前記押圧力に対応する荷重が前記荷重センサに印加されることを特徴とする請求項1記載の多方向入力装置。
【請求項3】
前記荷重印加部材は、前記荷重センサに対応して配置され前記荷重センサに対して荷重を印加する荷重印加部と、前記荷重印加部の外側に配置され前記基板に対して前記操作部材に向かう方向の付勢力を付与する付勢部と、を備えていることを特徴とする請求項2記載の多方向入力装置。
【請求項4】
前記荷重印加部は、前記荷重センサに印加される荷重に応じて変形するように構成されていることを特徴とする請求項3記載の多方向入力装置。
【請求項5】
前記操作部材及び前記基板を収容する筐体を具備し、前記筐体は、前記操作部材の前記押圧部を露出させる開口部が設けられたケースと、前記基板の裏面側に対向配置されると共に前記ケースに一体化されるフレームとを有し、前記フレームによって前記荷重印加部材が構成されていることを特徴とする請求項2から請求項4のいずれかに記載の多方向入力装置。
【請求項6】
一端側が前記荷重印加部材に固定されたスペーサ部材を備え、前記基板は前記スペーサ部材に対して揺動可能に配置されていることを特徴とする請求項2から請求項5のいずれかに記載の多方向入力装置。
【請求項7】
前記スペーサ部材の他端側に、前記操作部材の中央に対応する部分において前記操作部材と対向する凸部を備え、前記操作部材と前記荷重印加部材との距離を所定以上に保つことを特徴とする請求項6記載の多方向入力装置。
【請求項8】
前記スイッチは、前記基板の表面に形成された固定接点対と当該固定接点対に対向配置される可動接点により構成されると共に、前記操作部材と前記基板との間に前記固定接点対に対応するドーム状の弾性部材を備え、前記可動接点を介して前記固定接点対が導通する際に前記弾性部材の変形により所定の触感が得られるように構成されていることを特徴とする請求項1から請求項7のいずれかに記載の多方向入力装置。
【請求項9】
前記可動接点は、前記基板と前記弾性部材との間に設けられた金属板によって構成されており、前記押圧部に対する押圧力により当該押圧部に対応する前記弾性部材が変形すると、前記可動接点とこれに対応する前記固定接点対とが接触して前記固定接点対を導通させることを特徴とする請求項8記載の多方向入力装置。
【請求項1】
表面側に複数の押圧部が等角度間隔に配置される操作部材と、前記操作部材の裏面側に対向配置され、前記押圧部と対応する表面側の位置にスイッチを備える基板と、前記基板の裏面側における前記操作部材の中央に対応する位置に設けられる荷重センサと、前記荷重センサに対して荷重を印加できるように前記基板の裏面側に配置される荷重印加部材と、を備え、
前記押圧部に対する所定の押圧力により当該押圧部と対応するスイッチの導通状態が切り替えられると共に、前記基板の移動を伴って、前記荷重印加部材により前記押圧部に対する押圧力に対応する荷重が前記荷重センサに印加されることを特徴とする多方向入力装置。
【請求項2】
前記荷重センサは、前記基板の裏面に取り付けられ、前記基板は、前記押圧部に対する押圧力に応じて移動可能に前記操作部材と前記荷重印加部材との間に配置されており、前記押圧力により前記基板が初期位置から前記荷重印加部材側に移動し、前記基板と前記荷重印加部材とで前記荷重センサが挟み込まれて前記押圧力に対応する荷重が前記荷重センサに印加されることを特徴とする請求項1記載の多方向入力装置。
【請求項3】
前記荷重印加部材は、前記荷重センサに対応して配置され前記荷重センサに対して荷重を印加する荷重印加部と、前記荷重印加部の外側に配置され前記基板に対して前記操作部材に向かう方向の付勢力を付与する付勢部と、を備えていることを特徴とする請求項2記載の多方向入力装置。
【請求項4】
前記荷重印加部は、前記荷重センサに印加される荷重に応じて変形するように構成されていることを特徴とする請求項3記載の多方向入力装置。
【請求項5】
前記操作部材及び前記基板を収容する筐体を具備し、前記筐体は、前記操作部材の前記押圧部を露出させる開口部が設けられたケースと、前記基板の裏面側に対向配置されると共に前記ケースに一体化されるフレームとを有し、前記フレームによって前記荷重印加部材が構成されていることを特徴とする請求項2から請求項4のいずれかに記載の多方向入力装置。
【請求項6】
一端側が前記荷重印加部材に固定されたスペーサ部材を備え、前記基板は前記スペーサ部材に対して揺動可能に配置されていることを特徴とする請求項2から請求項5のいずれかに記載の多方向入力装置。
【請求項7】
前記スペーサ部材の他端側に、前記操作部材の中央に対応する部分において前記操作部材と対向する凸部を備え、前記操作部材と前記荷重印加部材との距離を所定以上に保つことを特徴とする請求項6記載の多方向入力装置。
【請求項8】
前記スイッチは、前記基板の表面に形成された固定接点対と当該固定接点対に対向配置される可動接点により構成されると共に、前記操作部材と前記基板との間に前記固定接点対に対応するドーム状の弾性部材を備え、前記可動接点を介して前記固定接点対が導通する際に前記弾性部材の変形により所定の触感が得られるように構成されていることを特徴とする請求項1から請求項7のいずれかに記載の多方向入力装置。
【請求項9】
前記可動接点は、前記基板と前記弾性部材との間に設けられた金属板によって構成されており、前記押圧部に対する押圧力により当該押圧部に対応する前記弾性部材が変形すると、前記可動接点とこれに対応する前記固定接点対とが接触して前記固定接点対を導通させることを特徴とする請求項8記載の多方向入力装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−108881(P2013−108881A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−254908(P2011−254908)
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月22日(2011.11.22)
【出願人】(000010098)アルプス電気株式会社 (4,263)
【Fターム(参考)】
[ Back to top ]