
多方向入力装置
【課題】 スイッチング動作が確実で小型化に好適な多方向入力装置を提供する。
【解決手段】 ハウジング1の内底面に第1の固定接点2とコモン接点3を配設し、コモン接点3上に載置した第1の可動接点板4と第1の固定接点2とで常開スイッチS1を構成する。ハウジング1に操作レバー14を傾倒自在に保持し、操作レバー14に第2の可動接点板11を固定した駆動体13をスプライン結合する。ハウジング1の上面開放端に蓋体7を被着し、蓋体7の底面に周方向に所定間隔を保って複数の第2の固定接点10を配列する。コモン接点3と第2の可動接点板11との間に導電性のコイルばね12を介設し、このコイルばね12の付勢力で第2の可動接点板11を各第2の固定接点10に圧接することにより、各第2の固定接点10と第2の可動接点板11とで複数の常閉スイッチS2を構成する。
【解決手段】 ハウジング1の内底面に第1の固定接点2とコモン接点3を配設し、コモン接点3上に載置した第1の可動接点板4と第1の固定接点2とで常開スイッチS1を構成する。ハウジング1に操作レバー14を傾倒自在に保持し、操作レバー14に第2の可動接点板11を固定した駆動体13をスプライン結合する。ハウジング1の上面開放端に蓋体7を被着し、蓋体7の底面に周方向に所定間隔を保って複数の第2の固定接点10を配列する。コモン接点3と第2の可動接点板11との間に導電性のコイルばね12を介設し、このコイルばね12の付勢力で第2の可動接点板11を各第2の固定接点10に圧接することにより、各第2の固定接点10と第2の可動接点板11とで複数の常閉スイッチS2を構成する。
【発明の詳細な説明】
【0001】
【発明の属する技術分野】本発明は、操作レバーの傾倒方向に応じてスイッチを動作させることのできる多方向入力装置に関する。
【0002】
【従来の技術】従来より特開平7−235241号公報に開示されているように、上面を開口したハウジングと、ハウジングの開口端に被着された蓋体と、ハウジングと蓋体の内部に配設されたスイッチ素子と、スイッチ素子を動作する操作レバーとで概略構成された多方向入力装置が提案されている。
【0003】前記スイッチ素子は、ハウジングの内底面に設けられた1つの中央固定接点と複数の周縁固定接点およびコモン接点と、ハウジングの内底面に載置された可動接点板とで構成されており、可動接点板はコモン接点と常時接触しているが、中央固定接点および各周縁固定接点とは離れる。
【0004】前記操作レバーはハウジングの内部に傾倒自在に保持されており、その上部は蓋体を挿通して外部へ突出している。この操作レバーには鍔部が設けられており、鍔部には蓋体の下面に対向する複数の支点部と、各支点部の外側に位置する弾性部とが形成されている。
【0005】このように構成された多方向入力装置において、操作レバーが中立位置にある時、可動接点板は中央固定接点および各周縁固定接点と離れており、スイッチオフの状態が得られる。
【0006】一方、操作レバーを任意方向に傾倒すると、操作レバーは傾倒方向と反対側に位置する支点部を回動支点として傾倒するため、傾倒方向に位置する弾性部が可動接点板の周縁を押圧すると共に、操作レバーの下端が可動接点板の中央を押圧する。これにより、傾倒方向に位置する周縁固定接点と中央固定接点とが可動接点板を介して導通されるため、スイッチオンの状態が得られる。
【0007】従って、操作レバーを任意方向へ傾倒させて可動接点板が周縁固定接点に接触した時点で、仮に可動接点板が中央固定接点に接触していなくても、弾性部がさらに撓むことにより、可動接点板を中央固定接点に接触させることができる。
【0008】
【発明が解決しようとする課題】しかしながら、前述した従来の多方向入力装置では、操作レバーに形成した弾性部によって可動接点板を周縁固定接点に接触させるように構成されているため、周縁固定接点に対する可動接点板の接触圧を高めることができず、導通不良が発生するという問題があった。
【0009】また、ハウジングの内底面に1つの中央固定接点とそれを囲む複数の周縁固定接点とを配設する必要があるため、これら固定接点を配置するスペースによってハウジングの幅寸法が大きくなり、多方向入力装置の小型化が妨げられるという問題もあった。
【0010】本発明の目的は、このような従来技術の欠点を解消し、動作信頼性に優れて、小型化が可能な多方向入力装置を提供することにある。
【0011】
【課題を解決するための手段】前記目的を達成するため、第1の本発明は、収納空間を介して一体化された上側部材および下側部材と、前記収納空間の内部に傾倒可能に保持され、前記上側部材を貫通して外部に突出する操作レバーと、前記下側部材に設けられた第1の固定接点と、この第1の固定接点に対向する第1の可動接点板と、前記上側部材に周方向に所定の間隔をおいて設けられた第2の固定接点群と、これら第2の固定接点群に対向する第2の可動接点板と、この第2の可動接点板を前記第2の固定接点群に圧接する付勢部材を備える。
【0012】そして前記操作レバーの傾倒時に、前記第1の可動接点板が第1の固定接点に接触すると共に、前記第2の可動接点板が前記第2の固定接点群のうちの1つまたは2つの第2の固定接点を傾倒支点として残りの第2の固定接点から離れるように構成したことを特徴とするものである。
【0013】前記目的を達成するため、第2の本発明は、収納空間を介して一体化された上側部材および下側部材と、前記収納空間の内部に傾倒可能に保持され、前記上側部材を貫通して外部に突出する操作レバーと、前記上側部材に周方向に所定の間隔をおいて設けられた固定接点群と、これら第2の固定接点群に対向するように配置され、前記操作レバーと共に傾倒する可動接点板と、この可動接点板を前記固定接点群に圧接する付勢部材と、前記可動接点板と固定接点群の間に介在された例えば弾性を有する金属薄板などからなる導電性の弾性部材を備える。
【0014】そして前記操作レバーの非操作時には、前記付勢部材により前記弾性部材を介して可動接点板が全ての固定接点群と導通しており、前記操作レバーが所定角度以上傾倒すると、前記固定接点群のうちの1つまたは2つの第2の固定接点を傾倒支点として前記可動接点板が傾倒して、固定接点群のうちの傾倒支点になっていない固定接点と可動接点板との間の導通が断たれるように構成されていることを特徴とするものである。
【0015】
【発明の実施の形態】前述のように第1の本発明では、第1の可動接点板と第1の固定接点で構成される常開スイッチと、第2の可動接点板と複数の第2の固定接点で構成される複数の常閉スイッチとを設け、操作レバーの傾倒時に、第1の可動接点板を第1の固定接点に接触させることにより常開スイッチをオンさせると共に、第2の可動接点板を第2の固定接点群の1または2つを支点として傾倒させることにより、複数の常閉スイッチの1または2つをオンさせたまま残りをオフさせる構成になっている。
【0016】そうすると、第1の可動接点板と第1の固定接点間の接離動作と、第2の可動接点板と第2の固定接点群間の接離動作が共に確実になるため、導通不良を解消することができ、しかも、第1の固定接点と第2の固定接点群を別々の部材に振り分けることができるため、多方向入力装置の小型化を図ることができる。
【0017】前述のように第2の本発明では、操作レバーが若干傾いてもあるいは微少振動しても導電性弾性部材の働きにより導通状態が保持されるから、不用意にオフになることがなく、誤信号の発生が防止できる。
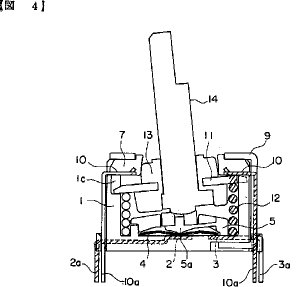
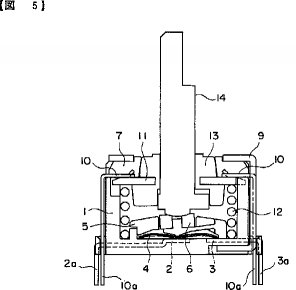
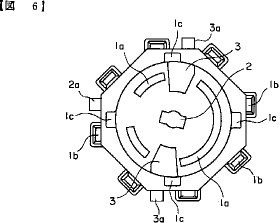
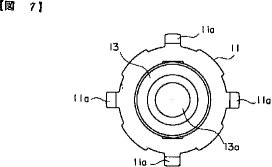
【0018】次に本発明の実施の形態について図とともに説明する。図1は第1の実施の形態に係る多方向入力装置の平面図、図2はその多方向入力装置の正面図、図3R>3は多方向入力装置の非操作状態を示す断面図、図4は多方向入力装置の傾倒動作を示す断面図、図5は多方向入力装置のプッシュ動作を示す断面図、図6はハウジングの平面図、図7は駆動体と第2の可動接点板の平面図、図8はガイド部材の平面図、図9は蓋体の底面図である。
【0019】これらの図において、符号1は下側部材を成す合成樹脂製のハウジングで、ハウジング1は上面を開口した平面形状がほぼ八角形状に形成されている。図6R>6に示すようにハウジング1の内底面に、中央に位置する第1の固定接点2と周縁に位置する2つのコモン接点3が配設され、第1の固定接点2と各コモン接点3はそれぞれ端子2a,3aとしてハウジング1の外部に導出されている。
【0020】ハウジング1の内底面に複数の突起1aが立設され、突起1aは第1の固定接点2を中心とする同一の円弧上に設けられている。ハウジング1の各辺の外側壁にガイド孔1bが形成され、ハウジング1の内側壁の開口端側に90度の間隔で4つのストッパ用切欠き部1cが形成されている。
【0021】ハウジング1の内底面にドーム状の第1の可動接点板4が載置され、その外周縁は突起1aにより位置規制されている。第1の可動接点板4はコモン接点3に常時接触しているが、第1の固定接点2から離れており、第1の固定接点2と第1の可動接点板4により常開スイッチS1が構成されている。
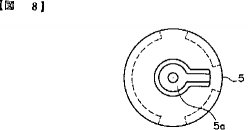
【0022】前記突起1aに合成樹脂製のガイド部材5が位置決めされ、ガイド部材5に押圧片5aが片持ち状に一体成形されている(図8参照)。押圧片5aの上に円筒状のゴム弾性体6が取付けられ、押圧片5aの下端は第1の可動接点板4の上面中央部に対向している。
【0023】ハウジング1の開口端は上側部材を成す合成樹脂製の蓋体7により覆われ、ハウジング1と蓋体7との間に収納空間8が形成される。蓋体7の下面に第2の固定接点10がアウトサートされ、取付脚9を有する板状の金属部材を蓋体7の上面に被せ、取付脚9をハウジング1の外側壁に沿って下方へ延ばして先端を内側へ直角に折り曲げることにより、ハウジング1と蓋体7が連結される。
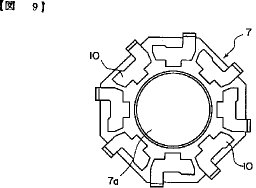
【0024】図9に示すように蓋体7の中央部に貫通孔7aが形成され、貫通孔7aの周囲に第2の固定接点10が所定間隔を保って8個配設されている。第2の固定接点10はそれぞれ端子10aとして下方へ延び、各端子10aはハウジング1のガイド孔1bに挿通される(図2参照)。
【0025】収納空間8内に第2の可動接点板11が配置され、第2の可動接点板11とハウジング1の内底面の間に導電性のコイルばね12が介在されている。コイルばね12の下端はコモン接点3に接し、コモン接点3と第2の可動接点板11はコイルばね12を介して常時導通されている。第2の可動接点板11はコイルばね12の付勢力により蓋体7の下面に配設された各第2の固定接点10に圧接され、第2の固定接点10群と第2の可動接点板11により8個の常閉スイッチS2が構成されている。
【0026】第2の可動接点板11は合成樹脂製の駆動体13にアウトサートされ、駆動体13の上部は蓋体7の貫通孔7aと係合している。第2の可動接点板11の外周縁には90度の間隔を保って4つの突部11aが形成され(図7参照)、突部11aはハウジング1の内壁面に形成された切欠き部1cに挿入されて、回転方向の回り止めがなされる。
【0027】駆動体13には下部を小判形状とする中心孔13aが設けられ、中心孔13aに金属製の操作レバー14が挿入されている。操作レバー14は中心孔13aに対して軸線方向へ移動可能であるが、中心孔13aの小判形部分とスプライン結合することにより、回転方向への移動は規制されている。操作レバー14の上部は蓋体7の外部へ突出し、操作レバー14の下端はゴム弾性体6に当接している。
【0028】次にこの多方向入力装置の動作について説明する。操作レバー14が図3に示す中立位置にある場合、第1の可動接点板4が第1の固定接点2から離れているため常開スイッチS1はオフ、第2の可動接点板11が第2の固定接点10群の全てに接触しているため8個の常閉スイッチS2はオンとなっている。
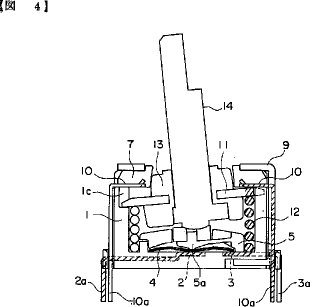
【0029】この中立位置から操作レバー14を任意方向、例えば図4に示す方向へ傾倒すると、第2の可動接点板11は傾倒方向の反対側に位置する第2の固定接点10を支点として回動し、それ以外の第2の固定接点10から離れるため、支点となる第2の固定接点10に対応する常閉スイッチS2のオン状態を維持し、他の常閉スイッチS2はオフとなる。
【0030】また、操作レバー14の傾倒操作に伴い操作レバー14の下端がゴム弾性体6と押圧片5aを介して第1の可動接点板4を押圧するため、第1の可動接点板4が第1の固定接点2に接触した時点で、常開スイッチS1がオフからオンへと切り換わる。常開スイッチS1のオン後も第2の可動接点板11の突部11aが切欠き部1cの底部に当接するまで、操作レバー14はさらに傾倒操作を続けることができ、その間のオーバーストローク量はゴム弾性体6が圧縮変形することで吸収される。
【0031】操作レバー14に対する傾倒操作力を取り除くと、第2の可動接点板11はコイルばね12の付勢力により元の状態に復帰するため、操作レバー14は図3R>3の中立位置に戻り、8個の常閉スイッチS2の全ては再びオンとなる。また、ゴム弾性体6と押圧片5aおよび第1の可動接点板4はそれ自体の弾性により復帰し、第1の可動接点板4が第1の固定接点2から離れるため、常開スイッチS1も再びオフとなる。操作レバー14を図4とは別方向へ傾倒した場合も同様である。
【0032】図3の中立位置から操作レバー14を押し込むと、図5に示すように操作レバー14は駆動体13の中心孔13aに案内されて真下へ移動し、ゴム弾性体6と押圧片5aを介して第1の可動接点板4を押圧する。この場合、第2の可動接点板11と駆動体13は移動しないため、8個の常閉スイッチS2の全てはオン状態を維持し、第1の可動接点板4が第1の固定接点2に接触した時点で、常開スイッチS1がオフからオンへと切り換わる。
【0033】操作レバー14に対する押圧操作力を取り除くと、ゴム弾性体6と押圧片5aおよび第1の可動接点板4はそれ自体の弾性により復帰し、第1の可動接点板4が第1の固定接点2から離れるため、常開スイッチS1は再びオフとなる。
【0034】このように構成された多方向入力装置において、例えば第1の固定接点2の端子2aと第2の固定接点10群の端子10aとをマイコンに接続すれば、端子2aと各端子10a間のオン/オフ信号に基づいて、マイコンが操作レバー14の傾倒方向と操作レバー14のプッシュ動作を検出することができる。
【0035】すなわち操作レバー14が中立位置にある場合、前述のように8個の常閉スイッチS2は全てオンであるが、常開スイッチS1はオフであるため、マイコンは端子2aと各端子10a間からオフ信号を取り込み、操作レバー14が非操作状態にあると判断する。
【0036】また操作レバー14が任意方向へ傾倒された場合、常開スイッチS1と8個の常閉スイッチS2の1つがオンになるため、端子2aとオン状態の端子10aとの間に、図4の斜線で示すような第1の固定接点2−第1の可動接点板4−コモン接点3−コイルばね12−第2の可動接点板11および第2の固定接点10の導通路が形成され、マイコンはこのオン信号に基づき、操作レバー14がオン状態にある第2の固定接点10の反対方向へ傾倒されたことを判断する。
【0037】さらに、操作レバー14が中立位置で押圧操作された場合、8個の常閉スイッチS2の全てがオンのまま常開スイッチS1がオンとなるため、マイコンは端子2aと各端子10aの全てからオン信号を取り込み、操作レバー14がプッシュ動作されたことを判断する。
【0038】他の検出方法として、第1の固定接点2の端子2aとコモン接点3の端子3aおよび第2の固定接点10群の端子10aをマイコンに接続することも可能である。この場合、マイコンは常開スイッチS1のオン/オフ状態を監視し、端子2aと端子3a間がオフであると、操作レバー14が非操作状態にあると判断する。また、マイコンが端子2aと端子3a間からオン信号を取り込むと、このオン信号をトリガとして常閉スイッチS2のオン/オフ状態を監視し、端子3aと8個の端子10aが全てオンであると、操作レバー14がプッシュ動作されたものと判断し、端子3aと特定の端子10a間からオン信号が出力されると、このオン信号に基づいて操作レバー14の傾倒方向を確定する。
【0039】なお、実際の使用上ほとんど発生することはないが、操作レバー14が隣接する2個の第2の固定接点10の真中方向に傾倒された場合、第2の可動接点板11は若干撓んで傾倒方向の反対側に位置する2個の第2の固定接点10を支点として回動し、それ以外の第2の固定接点10から離れる。従ってこの場合、8個の常閉スイッチS2の2つがオンで、残りの常閉スイッチS2がオフとなるが、マイコンにより8個の常閉スイッチS2の優先順位を確定するようにしておけば、スイッチング動作の行われない不感帯域をなくすことができる。
【0040】なお、本実施の形態は、第2の固定接点10を8個所に設けて8方向の方位を検出する構成になっているが、第2の固定接点10の数は8個所に限定されず、例えば、4個の第2の固定接点10を90度毎に設ければ、4方向の方位を検出する多方向入力装置を実現できる。
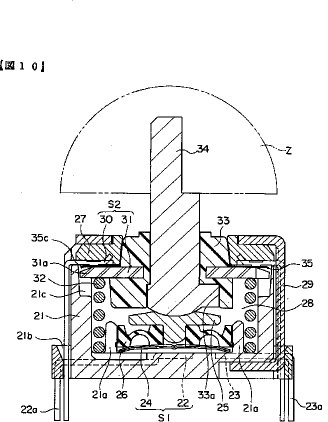
【0041】図10ないし図24は、本発明の第2の実施の形態を示す図である。図10は多方向入力装置の非操作状態での断面図、図11は多方向入力装置のハウジングの平面図、図12は上側の可動接点板の平面図、図1313は上側の固定接点を取り付けた蓋体の底面図、図14R>4は導電性弾性部材の平面図、図15は導電性弾性部材の断面図、図16ないし図18は押圧部材の平面図、断面図、底面図、図19ないし図21はゴム弾性体の平面図、断面図、底面図、図22は多方向入力装置の微少の傾倒状態を示す断面図、図23は多方向入力装置の傾倒動作を示す断面図、図24はこの実施の形態に係る多方向入力装置の動作原理を説明するための図である。
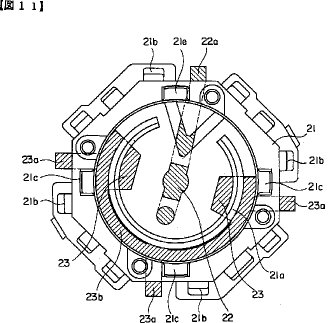
【0042】合成樹脂製のハウジング21は上面を開口した平面形状がほぼ八角形をしており、図11に示すようにハウジング21の内底面に、中央に位置する下側の固定接点22と周辺部に位置する2つのコモン接点23が配設され、下側の固定接点22と各コモン接点23はそれぞれ端子22a,23aとしてハウジング21の外部に突出している。図中の斜線と破線は、下側の固定接点22と固定端子22aならびにコモン接点23とコモン端子23aとの接続を示している。
【0043】ハウジング21の内底面に円弧状の突起21aが設けられ、下側の固定接点22を中心とする同一の円弧上に配列されている。図11に示すようにハウジング21の各辺の外側壁にガイド孔21bが形成され、ハウジング21の内側壁の開口端側に90度の間隔で4つの切欠き部21cが形成されている。
【0044】ハウジング21の内底面にドーム状の下側の可動接点板24が設けられ、突起21aで位置規制されている。下側の可動接点板24はコモン接点23と常時接触し、下側の固定接点22から離れ、下側の固定接点22と下側の可動接点板24により常開スイッチS1が構成されている。突起21aの内側に押圧部材25とゴム弾性体26の複合体が位置決めされ、下側の可動接点板24の上面中央部と対向している。
【0045】押圧部材25は合成樹脂の成形体からなり、図16ないし図18に示すように上面に浅い球面状の受け面25aと、下部に突出部25bを有している。ゴム弾性体26は図19ないし図21に示すように前記突起21aに嵌合して位置決めされる外周部26aと、押圧部材25の突出部25bが挿入される貫通孔26bを有している。
【0046】ハウジング21の開口端は合成樹脂(電気絶縁体)製の蓋体27で覆われ、ハウジング21と蓋体27で収納空間28が形成されている。蓋体27の下面に上側の固定接点30がアウトサートされ、複数の取付脚を有する連結部材29の上端部を蓋体27の上に被せ、取付脚をハウジング21の外側壁に沿って下方へ延ばし下端部を内側へ折り曲げることにより、ハウジング21と蓋体27が連結される。
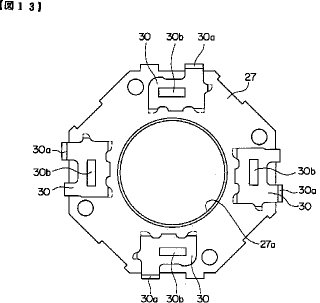
【0047】図13に示すように蓋体27の中央部に貫通孔27aが形成され、それの周囲に上側の固定接点30が周方向に90度間隔で4個配設され、各固定接点30のほぼ中央部に下方へ若干突出した突部30bが形成されている。蓋体27に上側の固定接点30をアウトサートする際に固定接点30の露出面が成形条件等がばらついて一部樹脂で覆われたとしても樹脂部から固定接点30を突出させるために突部30bが形成され、この突部30bにより後述する導電性弾性部材35を介して上側の可動接点板31との接触が確実になる。上側の固定接点30はそれぞれ端子30aとして下方へ延び、各端子30aはハウジング21のガイド孔21b(図10、図11参照)に挿通される。
【0048】収納空間28の内部に上側の可動接点板31が配置されて、それとハウジング21の内底面の間に導電性のコイルばね32が介在され、コイルばね32はハウジング21の周壁と突起21aの間で位置決めされている。コイルばね32の下端はコモン接点23とコモン端子23aとを接続している導電部23b(図11の円弧状の斜線部分)に接し、コモン接点23と上側の可動接点板31はコイルばね32を介して常時導通している。上側の可動接点板31はコイルばね32の付勢力で蓋体27の下面に配置された各上側の固定接点30に圧接され、上側の固定接点30群と上側の可動接点板31で4個の常閉スイッチS2が構成されている。
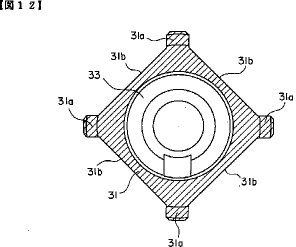
【0049】上側の可動接点板31は合成樹脂製の駆動体33にアウトサートされ、駆動体33の上部は蓋体27の貫通孔27aと嵌合している。図12に示すように上側の可動接点板31は外周部に90度の間隔を保って4つの突部31aと、各突部31aを結ぶ直線状に延びた4つの端縁31bを有しほぼ菱形をしており、図中の斜線部分が金属で構成され導電部となっている。各突部31aの上面は先端に行くに従って若干薄くなるようにテーパーを有し、ハウジング21の内壁面に形成された切欠き部21cに挿入され(図10参照)て周方向の回り止めがなさている。
【0050】このように各突部31aの上面にテーパーを設けることにより、上側の可動接点板31が傾いたときに、突部31aが邪魔にならずに、後述のように可動接点板31の直線状に延びた端部が導電性弾性部材35を介して蓋体27の下面と線接触することになる。従ってテーパーはその部分が導電性弾性部材35を介して当接しないように逃げるために形成され、各突部31aは回り止めの機能のみを有している。
【0051】駆動体33に下部を小判形状とする中心孔33aが設けられ、そこに金属製の操作レバー34の基端部が挿入されている。操作レバー34は中心孔33aに対して軸線方向へ移動可能であるが、中心孔33aの小判形部分とスプライン結合することにより、周方向への回転は規制されている。操作レバー34の上部は蓋体27の外部へ突出し、下端は押圧部材25の受け面25aに当接している。
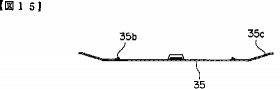
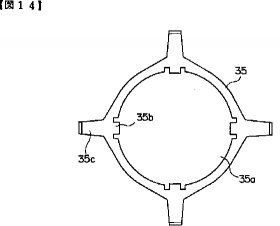
【0052】可動接点板31の上側に、例えばリン青銅薄板などからなる導電性弾性部材35が配置されている。導電性弾性部材35は図14ならびに図15に示す如く、中央部に駆動体33が挿入される穴35aが形成され、穴35aの内周部に複数の係止片35bが突設されて、外周部に4本の脚部35cが設けられている。
【0053】可動接点板31を保持した駆動体33の上部を導電性弾性部材35の穴35aに、駆動体33の中心と突部31aを結ぶ線上に脚部35cが位置するように挿入することにより、前記係止片35bが駆動体33の外周部に弾性的に係止して、導電性弾性部材35の下面の一部が可動接点板31の上面と接触する。図15に示すように各脚部35cは若干上方に屈曲しているため、可動接点板31の上面より上方に傾斜した状態になり、組み込んだときに固定接点30と対向するようになっている。
【0054】本実施の形態では導電性弾性部材35を駆動体33に係止したが、導電性弾性部材35を固定接点30または可動接点板31に設けることも可能である。また本実施の形態では金属薄板からなる導電性弾性部材35を用いたが、部分的に押圧することにより導電性が得られる異方性エラストマーシートなどを導電性弾性部材として用いることも可能である。
【0055】次にこの多方向入力装置の入力動作について説明する。操作レバー34が図10に示す中立位置にある場合、下側の可動接点板24が下側の固定接点22から離れているため常開スイッチS1はオフ、上側の可動接点板31が導電性弾性部材35を介して上側の固定接点30群の全てに接触しているため4個の常閉スイッチS2はオンになっている。
【0056】操作レバー34を中立位置から任意方向、例えば図23に示す方向へ大きく傾倒すると、上側の可動接点板31は傾倒方向の反対側に位置する固定接点30を支点として導電性弾性部材35と共に傾き、それ以外の固定接点30から脚部35cと可動接点板31が離れるため、支点となる上側の固定接点30に対応する常閉スイッチS2のオン状態を維持し、他の常閉スイッチS2はオフとなる。
【0057】この操作レバー34の傾倒操作で操作レバー34の下端が押圧部材25を介して下側の可動接点板24を押圧し、下側の可動接点板24が下側の固定接点22に接触した時点で、常開スイッチS1がオフからオンへ切り換わる。常開スイッチS1のオン後も上側の可動接点板31の突部31aが切欠き部21cの底部に当接するまで(図23の状態)、操作レバー34はさらに傾倒操作を続けることができ、その間のオーバーストローク分はゴム弾性体26の圧縮変形で吸収される。
【0058】操作レバー34に対する傾倒力を取り除くと、上側の可動接点板31はコイルばね32の付勢力で元の状態に復帰するため、操作レバー34は図10の中立位置に戻り、4個の常閉スイッチS2の全ては再びオンとなる。また、ゴム弾性体26および下側の可動接点板24も弾性により復帰し、下側の可動接点板24が下側の固定接点22から離れ、常開スイッチS1も再びオフとなる。操作レバー34を図23とは別方向へ傾倒した場合も同様である。
【0059】図10の中立位置から操作レバー34を押し込むと図22のように、操作レバー34は駆動体33の中心孔33aに案内されて下方へ移動し、押圧部材25を介して下側の可動接点板24を押圧して、可動接点板24が下側の固定接点22に接触した時点で、常開スイッチS1がオフからオンへ切り換わる。
【0060】操作レバー34を押し込む際に垂直に押せば問題はないが、実際は図22のように若干傾いた状態で押される場合がある。このとき上側の固定接点30と可動接点板31は前述の傾倒動作と同様の挙動を示し、前述の実施の形態においては常閉スイッチS2の一部がオフとなることがある。
【0061】この弊害を解消するため、上側の固定接点30と可動接点板31の間に導電性弾性部材35が介在され、操作レバー34が若干傾いた場合は図22のように、導電性弾性部材35の脚部35cは固定接点30と接触しており、傾倒方向の信号を発しないようになっている。
【0062】操作レバー34に対する押圧力を取り除くと、ゴム弾性体26と下側の可動接点板24は自信の弾性により復帰し、下側の可動接点板24が下側の固定接点22から離れ、常開スイッチS1は再びオフとなる。
【0063】図24は、菱形の可動接点板31を用いた場合の動作原理を説明する図である。なお、導電性弾性部材35は可撓性があり動作の妨げとならないので、以下の動作原理では省略して説明する。
【0064】図23に示すようにX方向に指先で摘みZを介して操作レバー34を傾けると、上側の可動接点板31はA点を支点として傾く。この際、操作レバー34の傾動中心Oを基準とし、傾く方向(X方向)と支点(A点)方向が一直線上揃っていないので、不安定な状態となる。従って、指先で押すことのみで、この方向に更に傾けることは難しく(操作軸が安定せず)、更に傾けると支点が安定するように、すなわちA−C線上で上側の可動接点板31の端部(端縁)が蓋体27と線接触するように、傾き方向が自然に強制され、常閉スイッチS2がオンとなる位置においては結局、A点とC点の2点で上側の固定接点30と上側の可動接点板31がほぼ同時に接触する。
【0065】具体的には操作レバー34を例えば60度方向に傾けても操作軸がその方向では安定せず、上側の可動接点板31の端部が蓋体27と線接触する45度方向に強制され、結局、A点とC点の2点で導電性弾性部材35を介して上側の固定接点30と上側の可動接点板31がほぼ同時に接触する。
【0066】なお、本実施の形態においては、操作レバーと駆動体を別体とし、操作レバーを上方から押した場合には、常開スイッチS1のみをオンすることによって、そのプッシュ動作を検知する。従って上記の通り若干傾けた状態でプッシュ動作してもスイッチS1のみが信号を発するので有効であるが、プッシュ動作を検知しないタイプにおいても有効であり、すなわち、非動作状態で振動が加わって操作レバーが微少に振動したとしても、方位信号を出力することがない。
【0067】
【発明の効果】本発明は、以上説明したような形態で実施され、以下に記載されるような効果を奏する。
【0068】請求項1記載のように構成すると、第1(下側)の可動接点板と第1(下側)の固定接点間の接離動作と、第2(上側)の可動接点板と第2(上側)の固定接点群間の接離動作が共に確実になるため、導通不良を解消することができ、しかも、下側の固定接点と上側の固定接点群を別々の部材に振り分けることができるため、多方向入力装置の小型化を図ることができる。
【0069】請求項2記載のように構成すると、第1の可動接点板と第2の可動接点板とをコイルばねを介して常時接続する導通路が形成されるため、多方向入力装置の全体構造を簡略化することができる。
【0070】請求項3記載のように構成すると、操作レバーをプッシュ動作した時に付勢部材からの力が操作レバーに作用しなくなるため、操作レバーを軽い力でプッシュ動作することができる。
【0071】請求項4記載のように構成すると、操作レバーから第1の可動接点板に過押圧力が作用しなくなるため、第1の可動接点板の損傷を防止することができる。
【0072】請求項5記載のように構成すると、第1の可動接点板が第1の可動接点板に接触した後も、弾性体が操作レバーの下端によりさらに圧縮されるため、操作レバーに傾倒方向のオーバーストロークを付与することができる。
【0073】請求項6記載のように構成すると、操作レバーが若干傾いても導電性弾性部材の働きにより導通状態が保持されるから、不用意にオフになることがなく、誤信号の発生が防止できる。また、振動が加わって操作レバーが微少に振動したときに、導電性弾性部材の働きにより導通状態が保持され、接点が振動の度毎に離れることなく、誤信号の発生が防止できる。
【0074】請求項7記載のように構成すると、導電性弾性部材の厚さが薄くでき、導電性弾性部材の介在による嵩高が抑制できる。
【0075】請求項8記載のように構成すると、導電性弾性部材の取付けが簡単にできるなどの特長を有している。
【図面の簡単な説明】
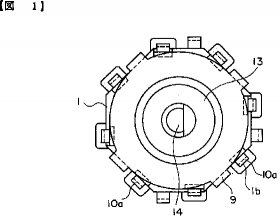
【図1】本発明の第1の実施の形態に係る多方向入力装置の平面図である。
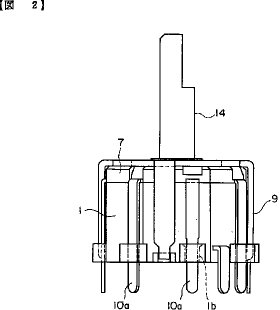
【図2】その多方向入力装置の正面図である。
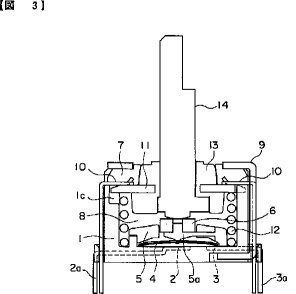
【図3】その多方向入力装置の非操作状態を示す断面図である。
【図4】その多方向入力装置の傾倒動作を示す断面図である。
【図5】その多方向入力装置のプッシュ動作を示す断面図である。
【図6】その多方向入力装置のハウジングの平面図である。
【図7】その多方向入力装置の駆動体と第2の可動接点板の平面図である。
【図8】その多方向入力装置のガイド部材の平面図である。
【図9】その多方向入力装置の蓋体の底面図である。
【図10】本発明の第2の実施の形態に係る多方向入力装置の非操作状態での断面図である。
【図11】その多方向入力装置のハウジングの平面図である。
【図12】その多方向入力装置の上側の可動接点板の平面図である。
【図13】その多方向入力装置の上側の固定接点を取り付けた蓋体の底面図である。
【図14】その多方向入力装置の導電性弾性部材の平面図である。
【図15】その導電性弾性部材の断面図である。
【図16】その多方向入力装置の押圧部材の平面図である。
【図17】その押圧部材の断面図である。
【図18】その押圧部材の底面図である。
【図19】その多方向入力装置のゴム弾性体の平面図である。
【図20】そのゴム弾性体の断面図である。
【図21】そのゴム弾性体の底面図である。
【図22】その多方向入力装置の微少の傾倒状態を示す断面図である。
【図23】その多方向入力装置の傾倒動作を示す断面図である。
【図24】この実施の形態に係る多方向入力装置の動作原理を説明するための図である。
【符号の説明】
1,21 ハウジング
2,22 下側の固定接点
3,23 コモン接点
4,24 下側の可動接点板
5 ガイド部材
6,26 ゴム弾性体
7,27 蓋体
8,28 収納空間
10,30 上側の固定接点
11,31 上側の可動接点板
12,32 コイルばね
13,33 駆動体
14,34 操作レバー
35 導電性弾性部材
S1 常開スイッチ
S2 常閉スイッチ
【0001】
【発明の属する技術分野】本発明は、操作レバーの傾倒方向に応じてスイッチを動作させることのできる多方向入力装置に関する。
【0002】
【従来の技術】従来より特開平7−235241号公報に開示されているように、上面を開口したハウジングと、ハウジングの開口端に被着された蓋体と、ハウジングと蓋体の内部に配設されたスイッチ素子と、スイッチ素子を動作する操作レバーとで概略構成された多方向入力装置が提案されている。
【0003】前記スイッチ素子は、ハウジングの内底面に設けられた1つの中央固定接点と複数の周縁固定接点およびコモン接点と、ハウジングの内底面に載置された可動接点板とで構成されており、可動接点板はコモン接点と常時接触しているが、中央固定接点および各周縁固定接点とは離れる。
【0004】前記操作レバーはハウジングの内部に傾倒自在に保持されており、その上部は蓋体を挿通して外部へ突出している。この操作レバーには鍔部が設けられており、鍔部には蓋体の下面に対向する複数の支点部と、各支点部の外側に位置する弾性部とが形成されている。
【0005】このように構成された多方向入力装置において、操作レバーが中立位置にある時、可動接点板は中央固定接点および各周縁固定接点と離れており、スイッチオフの状態が得られる。
【0006】一方、操作レバーを任意方向に傾倒すると、操作レバーは傾倒方向と反対側に位置する支点部を回動支点として傾倒するため、傾倒方向に位置する弾性部が可動接点板の周縁を押圧すると共に、操作レバーの下端が可動接点板の中央を押圧する。これにより、傾倒方向に位置する周縁固定接点と中央固定接点とが可動接点板を介して導通されるため、スイッチオンの状態が得られる。
【0007】従って、操作レバーを任意方向へ傾倒させて可動接点板が周縁固定接点に接触した時点で、仮に可動接点板が中央固定接点に接触していなくても、弾性部がさらに撓むことにより、可動接点板を中央固定接点に接触させることができる。
【0008】
【発明が解決しようとする課題】しかしながら、前述した従来の多方向入力装置では、操作レバーに形成した弾性部によって可動接点板を周縁固定接点に接触させるように構成されているため、周縁固定接点に対する可動接点板の接触圧を高めることができず、導通不良が発生するという問題があった。
【0009】また、ハウジングの内底面に1つの中央固定接点とそれを囲む複数の周縁固定接点とを配設する必要があるため、これら固定接点を配置するスペースによってハウジングの幅寸法が大きくなり、多方向入力装置の小型化が妨げられるという問題もあった。
【0010】本発明の目的は、このような従来技術の欠点を解消し、動作信頼性に優れて、小型化が可能な多方向入力装置を提供することにある。
【0011】
【課題を解決するための手段】前記目的を達成するため、第1の本発明は、収納空間を介して一体化された上側部材および下側部材と、前記収納空間の内部に傾倒可能に保持され、前記上側部材を貫通して外部に突出する操作レバーと、前記下側部材に設けられた第1の固定接点と、この第1の固定接点に対向する第1の可動接点板と、前記上側部材に周方向に所定の間隔をおいて設けられた第2の固定接点群と、これら第2の固定接点群に対向する第2の可動接点板と、この第2の可動接点板を前記第2の固定接点群に圧接する付勢部材を備える。
【0012】そして前記操作レバーの傾倒時に、前記第1の可動接点板が第1の固定接点に接触すると共に、前記第2の可動接点板が前記第2の固定接点群のうちの1つまたは2つの第2の固定接点を傾倒支点として残りの第2の固定接点から離れるように構成したことを特徴とするものである。
【0013】前記目的を達成するため、第2の本発明は、収納空間を介して一体化された上側部材および下側部材と、前記収納空間の内部に傾倒可能に保持され、前記上側部材を貫通して外部に突出する操作レバーと、前記上側部材に周方向に所定の間隔をおいて設けられた固定接点群と、これら第2の固定接点群に対向するように配置され、前記操作レバーと共に傾倒する可動接点板と、この可動接点板を前記固定接点群に圧接する付勢部材と、前記可動接点板と固定接点群の間に介在された例えば弾性を有する金属薄板などからなる導電性の弾性部材を備える。
【0014】そして前記操作レバーの非操作時には、前記付勢部材により前記弾性部材を介して可動接点板が全ての固定接点群と導通しており、前記操作レバーが所定角度以上傾倒すると、前記固定接点群のうちの1つまたは2つの第2の固定接点を傾倒支点として前記可動接点板が傾倒して、固定接点群のうちの傾倒支点になっていない固定接点と可動接点板との間の導通が断たれるように構成されていることを特徴とするものである。
【0015】
【発明の実施の形態】前述のように第1の本発明では、第1の可動接点板と第1の固定接点で構成される常開スイッチと、第2の可動接点板と複数の第2の固定接点で構成される複数の常閉スイッチとを設け、操作レバーの傾倒時に、第1の可動接点板を第1の固定接点に接触させることにより常開スイッチをオンさせると共に、第2の可動接点板を第2の固定接点群の1または2つを支点として傾倒させることにより、複数の常閉スイッチの1または2つをオンさせたまま残りをオフさせる構成になっている。
【0016】そうすると、第1の可動接点板と第1の固定接点間の接離動作と、第2の可動接点板と第2の固定接点群間の接離動作が共に確実になるため、導通不良を解消することができ、しかも、第1の固定接点と第2の固定接点群を別々の部材に振り分けることができるため、多方向入力装置の小型化を図ることができる。
【0017】前述のように第2の本発明では、操作レバーが若干傾いてもあるいは微少振動しても導電性弾性部材の働きにより導通状態が保持されるから、不用意にオフになることがなく、誤信号の発生が防止できる。
【0018】次に本発明の実施の形態について図とともに説明する。図1は第1の実施の形態に係る多方向入力装置の平面図、図2はその多方向入力装置の正面図、図3R>3は多方向入力装置の非操作状態を示す断面図、図4は多方向入力装置の傾倒動作を示す断面図、図5は多方向入力装置のプッシュ動作を示す断面図、図6はハウジングの平面図、図7は駆動体と第2の可動接点板の平面図、図8はガイド部材の平面図、図9は蓋体の底面図である。
【0019】これらの図において、符号1は下側部材を成す合成樹脂製のハウジングで、ハウジング1は上面を開口した平面形状がほぼ八角形状に形成されている。図6R>6に示すようにハウジング1の内底面に、中央に位置する第1の固定接点2と周縁に位置する2つのコモン接点3が配設され、第1の固定接点2と各コモン接点3はそれぞれ端子2a,3aとしてハウジング1の外部に導出されている。
【0020】ハウジング1の内底面に複数の突起1aが立設され、突起1aは第1の固定接点2を中心とする同一の円弧上に設けられている。ハウジング1の各辺の外側壁にガイド孔1bが形成され、ハウジング1の内側壁の開口端側に90度の間隔で4つのストッパ用切欠き部1cが形成されている。
【0021】ハウジング1の内底面にドーム状の第1の可動接点板4が載置され、その外周縁は突起1aにより位置規制されている。第1の可動接点板4はコモン接点3に常時接触しているが、第1の固定接点2から離れており、第1の固定接点2と第1の可動接点板4により常開スイッチS1が構成されている。
【0022】前記突起1aに合成樹脂製のガイド部材5が位置決めされ、ガイド部材5に押圧片5aが片持ち状に一体成形されている(図8参照)。押圧片5aの上に円筒状のゴム弾性体6が取付けられ、押圧片5aの下端は第1の可動接点板4の上面中央部に対向している。
【0023】ハウジング1の開口端は上側部材を成す合成樹脂製の蓋体7により覆われ、ハウジング1と蓋体7との間に収納空間8が形成される。蓋体7の下面に第2の固定接点10がアウトサートされ、取付脚9を有する板状の金属部材を蓋体7の上面に被せ、取付脚9をハウジング1の外側壁に沿って下方へ延ばして先端を内側へ直角に折り曲げることにより、ハウジング1と蓋体7が連結される。
【0024】図9に示すように蓋体7の中央部に貫通孔7aが形成され、貫通孔7aの周囲に第2の固定接点10が所定間隔を保って8個配設されている。第2の固定接点10はそれぞれ端子10aとして下方へ延び、各端子10aはハウジング1のガイド孔1bに挿通される(図2参照)。
【0025】収納空間8内に第2の可動接点板11が配置され、第2の可動接点板11とハウジング1の内底面の間に導電性のコイルばね12が介在されている。コイルばね12の下端はコモン接点3に接し、コモン接点3と第2の可動接点板11はコイルばね12を介して常時導通されている。第2の可動接点板11はコイルばね12の付勢力により蓋体7の下面に配設された各第2の固定接点10に圧接され、第2の固定接点10群と第2の可動接点板11により8個の常閉スイッチS2が構成されている。
【0026】第2の可動接点板11は合成樹脂製の駆動体13にアウトサートされ、駆動体13の上部は蓋体7の貫通孔7aと係合している。第2の可動接点板11の外周縁には90度の間隔を保って4つの突部11aが形成され(図7参照)、突部11aはハウジング1の内壁面に形成された切欠き部1cに挿入されて、回転方向の回り止めがなされる。
【0027】駆動体13には下部を小判形状とする中心孔13aが設けられ、中心孔13aに金属製の操作レバー14が挿入されている。操作レバー14は中心孔13aに対して軸線方向へ移動可能であるが、中心孔13aの小判形部分とスプライン結合することにより、回転方向への移動は規制されている。操作レバー14の上部は蓋体7の外部へ突出し、操作レバー14の下端はゴム弾性体6に当接している。
【0028】次にこの多方向入力装置の動作について説明する。操作レバー14が図3に示す中立位置にある場合、第1の可動接点板4が第1の固定接点2から離れているため常開スイッチS1はオフ、第2の可動接点板11が第2の固定接点10群の全てに接触しているため8個の常閉スイッチS2はオンとなっている。
【0029】この中立位置から操作レバー14を任意方向、例えば図4に示す方向へ傾倒すると、第2の可動接点板11は傾倒方向の反対側に位置する第2の固定接点10を支点として回動し、それ以外の第2の固定接点10から離れるため、支点となる第2の固定接点10に対応する常閉スイッチS2のオン状態を維持し、他の常閉スイッチS2はオフとなる。
【0030】また、操作レバー14の傾倒操作に伴い操作レバー14の下端がゴム弾性体6と押圧片5aを介して第1の可動接点板4を押圧するため、第1の可動接点板4が第1の固定接点2に接触した時点で、常開スイッチS1がオフからオンへと切り換わる。常開スイッチS1のオン後も第2の可動接点板11の突部11aが切欠き部1cの底部に当接するまで、操作レバー14はさらに傾倒操作を続けることができ、その間のオーバーストローク量はゴム弾性体6が圧縮変形することで吸収される。
【0031】操作レバー14に対する傾倒操作力を取り除くと、第2の可動接点板11はコイルばね12の付勢力により元の状態に復帰するため、操作レバー14は図3R>3の中立位置に戻り、8個の常閉スイッチS2の全ては再びオンとなる。また、ゴム弾性体6と押圧片5aおよび第1の可動接点板4はそれ自体の弾性により復帰し、第1の可動接点板4が第1の固定接点2から離れるため、常開スイッチS1も再びオフとなる。操作レバー14を図4とは別方向へ傾倒した場合も同様である。
【0032】図3の中立位置から操作レバー14を押し込むと、図5に示すように操作レバー14は駆動体13の中心孔13aに案内されて真下へ移動し、ゴム弾性体6と押圧片5aを介して第1の可動接点板4を押圧する。この場合、第2の可動接点板11と駆動体13は移動しないため、8個の常閉スイッチS2の全てはオン状態を維持し、第1の可動接点板4が第1の固定接点2に接触した時点で、常開スイッチS1がオフからオンへと切り換わる。
【0033】操作レバー14に対する押圧操作力を取り除くと、ゴム弾性体6と押圧片5aおよび第1の可動接点板4はそれ自体の弾性により復帰し、第1の可動接点板4が第1の固定接点2から離れるため、常開スイッチS1は再びオフとなる。
【0034】このように構成された多方向入力装置において、例えば第1の固定接点2の端子2aと第2の固定接点10群の端子10aとをマイコンに接続すれば、端子2aと各端子10a間のオン/オフ信号に基づいて、マイコンが操作レバー14の傾倒方向と操作レバー14のプッシュ動作を検出することができる。
【0035】すなわち操作レバー14が中立位置にある場合、前述のように8個の常閉スイッチS2は全てオンであるが、常開スイッチS1はオフであるため、マイコンは端子2aと各端子10a間からオフ信号を取り込み、操作レバー14が非操作状態にあると判断する。
【0036】また操作レバー14が任意方向へ傾倒された場合、常開スイッチS1と8個の常閉スイッチS2の1つがオンになるため、端子2aとオン状態の端子10aとの間に、図4の斜線で示すような第1の固定接点2−第1の可動接点板4−コモン接点3−コイルばね12−第2の可動接点板11および第2の固定接点10の導通路が形成され、マイコンはこのオン信号に基づき、操作レバー14がオン状態にある第2の固定接点10の反対方向へ傾倒されたことを判断する。
【0037】さらに、操作レバー14が中立位置で押圧操作された場合、8個の常閉スイッチS2の全てがオンのまま常開スイッチS1がオンとなるため、マイコンは端子2aと各端子10aの全てからオン信号を取り込み、操作レバー14がプッシュ動作されたことを判断する。
【0038】他の検出方法として、第1の固定接点2の端子2aとコモン接点3の端子3aおよび第2の固定接点10群の端子10aをマイコンに接続することも可能である。この場合、マイコンは常開スイッチS1のオン/オフ状態を監視し、端子2aと端子3a間がオフであると、操作レバー14が非操作状態にあると判断する。また、マイコンが端子2aと端子3a間からオン信号を取り込むと、このオン信号をトリガとして常閉スイッチS2のオン/オフ状態を監視し、端子3aと8個の端子10aが全てオンであると、操作レバー14がプッシュ動作されたものと判断し、端子3aと特定の端子10a間からオン信号が出力されると、このオン信号に基づいて操作レバー14の傾倒方向を確定する。
【0039】なお、実際の使用上ほとんど発生することはないが、操作レバー14が隣接する2個の第2の固定接点10の真中方向に傾倒された場合、第2の可動接点板11は若干撓んで傾倒方向の反対側に位置する2個の第2の固定接点10を支点として回動し、それ以外の第2の固定接点10から離れる。従ってこの場合、8個の常閉スイッチS2の2つがオンで、残りの常閉スイッチS2がオフとなるが、マイコンにより8個の常閉スイッチS2の優先順位を確定するようにしておけば、スイッチング動作の行われない不感帯域をなくすことができる。
【0040】なお、本実施の形態は、第2の固定接点10を8個所に設けて8方向の方位を検出する構成になっているが、第2の固定接点10の数は8個所に限定されず、例えば、4個の第2の固定接点10を90度毎に設ければ、4方向の方位を検出する多方向入力装置を実現できる。
【0041】図10ないし図24は、本発明の第2の実施の形態を示す図である。図10は多方向入力装置の非操作状態での断面図、図11は多方向入力装置のハウジングの平面図、図12は上側の可動接点板の平面図、図1313は上側の固定接点を取り付けた蓋体の底面図、図14R>4は導電性弾性部材の平面図、図15は導電性弾性部材の断面図、図16ないし図18は押圧部材の平面図、断面図、底面図、図19ないし図21はゴム弾性体の平面図、断面図、底面図、図22は多方向入力装置の微少の傾倒状態を示す断面図、図23は多方向入力装置の傾倒動作を示す断面図、図24はこの実施の形態に係る多方向入力装置の動作原理を説明するための図である。
【0042】合成樹脂製のハウジング21は上面を開口した平面形状がほぼ八角形をしており、図11に示すようにハウジング21の内底面に、中央に位置する下側の固定接点22と周辺部に位置する2つのコモン接点23が配設され、下側の固定接点22と各コモン接点23はそれぞれ端子22a,23aとしてハウジング21の外部に突出している。図中の斜線と破線は、下側の固定接点22と固定端子22aならびにコモン接点23とコモン端子23aとの接続を示している。
【0043】ハウジング21の内底面に円弧状の突起21aが設けられ、下側の固定接点22を中心とする同一の円弧上に配列されている。図11に示すようにハウジング21の各辺の外側壁にガイド孔21bが形成され、ハウジング21の内側壁の開口端側に90度の間隔で4つの切欠き部21cが形成されている。
【0044】ハウジング21の内底面にドーム状の下側の可動接点板24が設けられ、突起21aで位置規制されている。下側の可動接点板24はコモン接点23と常時接触し、下側の固定接点22から離れ、下側の固定接点22と下側の可動接点板24により常開スイッチS1が構成されている。突起21aの内側に押圧部材25とゴム弾性体26の複合体が位置決めされ、下側の可動接点板24の上面中央部と対向している。
【0045】押圧部材25は合成樹脂の成形体からなり、図16ないし図18に示すように上面に浅い球面状の受け面25aと、下部に突出部25bを有している。ゴム弾性体26は図19ないし図21に示すように前記突起21aに嵌合して位置決めされる外周部26aと、押圧部材25の突出部25bが挿入される貫通孔26bを有している。
【0046】ハウジング21の開口端は合成樹脂(電気絶縁体)製の蓋体27で覆われ、ハウジング21と蓋体27で収納空間28が形成されている。蓋体27の下面に上側の固定接点30がアウトサートされ、複数の取付脚を有する連結部材29の上端部を蓋体27の上に被せ、取付脚をハウジング21の外側壁に沿って下方へ延ばし下端部を内側へ折り曲げることにより、ハウジング21と蓋体27が連結される。
【0047】図13に示すように蓋体27の中央部に貫通孔27aが形成され、それの周囲に上側の固定接点30が周方向に90度間隔で4個配設され、各固定接点30のほぼ中央部に下方へ若干突出した突部30bが形成されている。蓋体27に上側の固定接点30をアウトサートする際に固定接点30の露出面が成形条件等がばらついて一部樹脂で覆われたとしても樹脂部から固定接点30を突出させるために突部30bが形成され、この突部30bにより後述する導電性弾性部材35を介して上側の可動接点板31との接触が確実になる。上側の固定接点30はそれぞれ端子30aとして下方へ延び、各端子30aはハウジング21のガイド孔21b(図10、図11参照)に挿通される。
【0048】収納空間28の内部に上側の可動接点板31が配置されて、それとハウジング21の内底面の間に導電性のコイルばね32が介在され、コイルばね32はハウジング21の周壁と突起21aの間で位置決めされている。コイルばね32の下端はコモン接点23とコモン端子23aとを接続している導電部23b(図11の円弧状の斜線部分)に接し、コモン接点23と上側の可動接点板31はコイルばね32を介して常時導通している。上側の可動接点板31はコイルばね32の付勢力で蓋体27の下面に配置された各上側の固定接点30に圧接され、上側の固定接点30群と上側の可動接点板31で4個の常閉スイッチS2が構成されている。
【0049】上側の可動接点板31は合成樹脂製の駆動体33にアウトサートされ、駆動体33の上部は蓋体27の貫通孔27aと嵌合している。図12に示すように上側の可動接点板31は外周部に90度の間隔を保って4つの突部31aと、各突部31aを結ぶ直線状に延びた4つの端縁31bを有しほぼ菱形をしており、図中の斜線部分が金属で構成され導電部となっている。各突部31aの上面は先端に行くに従って若干薄くなるようにテーパーを有し、ハウジング21の内壁面に形成された切欠き部21cに挿入され(図10参照)て周方向の回り止めがなさている。
【0050】このように各突部31aの上面にテーパーを設けることにより、上側の可動接点板31が傾いたときに、突部31aが邪魔にならずに、後述のように可動接点板31の直線状に延びた端部が導電性弾性部材35を介して蓋体27の下面と線接触することになる。従ってテーパーはその部分が導電性弾性部材35を介して当接しないように逃げるために形成され、各突部31aは回り止めの機能のみを有している。
【0051】駆動体33に下部を小判形状とする中心孔33aが設けられ、そこに金属製の操作レバー34の基端部が挿入されている。操作レバー34は中心孔33aに対して軸線方向へ移動可能であるが、中心孔33aの小判形部分とスプライン結合することにより、周方向への回転は規制されている。操作レバー34の上部は蓋体27の外部へ突出し、下端は押圧部材25の受け面25aに当接している。
【0052】可動接点板31の上側に、例えばリン青銅薄板などからなる導電性弾性部材35が配置されている。導電性弾性部材35は図14ならびに図15に示す如く、中央部に駆動体33が挿入される穴35aが形成され、穴35aの内周部に複数の係止片35bが突設されて、外周部に4本の脚部35cが設けられている。
【0053】可動接点板31を保持した駆動体33の上部を導電性弾性部材35の穴35aに、駆動体33の中心と突部31aを結ぶ線上に脚部35cが位置するように挿入することにより、前記係止片35bが駆動体33の外周部に弾性的に係止して、導電性弾性部材35の下面の一部が可動接点板31の上面と接触する。図15に示すように各脚部35cは若干上方に屈曲しているため、可動接点板31の上面より上方に傾斜した状態になり、組み込んだときに固定接点30と対向するようになっている。
【0054】本実施の形態では導電性弾性部材35を駆動体33に係止したが、導電性弾性部材35を固定接点30または可動接点板31に設けることも可能である。また本実施の形態では金属薄板からなる導電性弾性部材35を用いたが、部分的に押圧することにより導電性が得られる異方性エラストマーシートなどを導電性弾性部材として用いることも可能である。
【0055】次にこの多方向入力装置の入力動作について説明する。操作レバー34が図10に示す中立位置にある場合、下側の可動接点板24が下側の固定接点22から離れているため常開スイッチS1はオフ、上側の可動接点板31が導電性弾性部材35を介して上側の固定接点30群の全てに接触しているため4個の常閉スイッチS2はオンになっている。
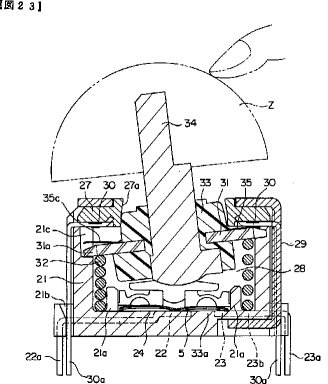
【0056】操作レバー34を中立位置から任意方向、例えば図23に示す方向へ大きく傾倒すると、上側の可動接点板31は傾倒方向の反対側に位置する固定接点30を支点として導電性弾性部材35と共に傾き、それ以外の固定接点30から脚部35cと可動接点板31が離れるため、支点となる上側の固定接点30に対応する常閉スイッチS2のオン状態を維持し、他の常閉スイッチS2はオフとなる。
【0057】この操作レバー34の傾倒操作で操作レバー34の下端が押圧部材25を介して下側の可動接点板24を押圧し、下側の可動接点板24が下側の固定接点22に接触した時点で、常開スイッチS1がオフからオンへ切り換わる。常開スイッチS1のオン後も上側の可動接点板31の突部31aが切欠き部21cの底部に当接するまで(図23の状態)、操作レバー34はさらに傾倒操作を続けることができ、その間のオーバーストローク分はゴム弾性体26の圧縮変形で吸収される。
【0058】操作レバー34に対する傾倒力を取り除くと、上側の可動接点板31はコイルばね32の付勢力で元の状態に復帰するため、操作レバー34は図10の中立位置に戻り、4個の常閉スイッチS2の全ては再びオンとなる。また、ゴム弾性体26および下側の可動接点板24も弾性により復帰し、下側の可動接点板24が下側の固定接点22から離れ、常開スイッチS1も再びオフとなる。操作レバー34を図23とは別方向へ傾倒した場合も同様である。
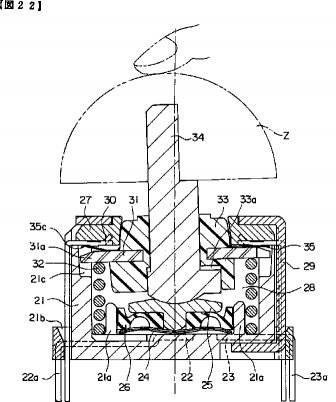
【0059】図10の中立位置から操作レバー34を押し込むと図22のように、操作レバー34は駆動体33の中心孔33aに案内されて下方へ移動し、押圧部材25を介して下側の可動接点板24を押圧して、可動接点板24が下側の固定接点22に接触した時点で、常開スイッチS1がオフからオンへ切り換わる。
【0060】操作レバー34を押し込む際に垂直に押せば問題はないが、実際は図22のように若干傾いた状態で押される場合がある。このとき上側の固定接点30と可動接点板31は前述の傾倒動作と同様の挙動を示し、前述の実施の形態においては常閉スイッチS2の一部がオフとなることがある。
【0061】この弊害を解消するため、上側の固定接点30と可動接点板31の間に導電性弾性部材35が介在され、操作レバー34が若干傾いた場合は図22のように、導電性弾性部材35の脚部35cは固定接点30と接触しており、傾倒方向の信号を発しないようになっている。
【0062】操作レバー34に対する押圧力を取り除くと、ゴム弾性体26と下側の可動接点板24は自信の弾性により復帰し、下側の可動接点板24が下側の固定接点22から離れ、常開スイッチS1は再びオフとなる。
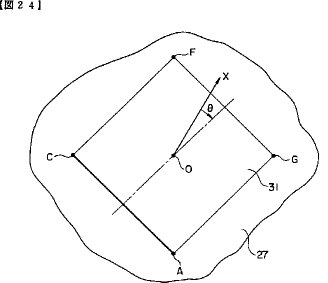
【0063】図24は、菱形の可動接点板31を用いた場合の動作原理を説明する図である。なお、導電性弾性部材35は可撓性があり動作の妨げとならないので、以下の動作原理では省略して説明する。
【0064】図23に示すようにX方向に指先で摘みZを介して操作レバー34を傾けると、上側の可動接点板31はA点を支点として傾く。この際、操作レバー34の傾動中心Oを基準とし、傾く方向(X方向)と支点(A点)方向が一直線上揃っていないので、不安定な状態となる。従って、指先で押すことのみで、この方向に更に傾けることは難しく(操作軸が安定せず)、更に傾けると支点が安定するように、すなわちA−C線上で上側の可動接点板31の端部(端縁)が蓋体27と線接触するように、傾き方向が自然に強制され、常閉スイッチS2がオンとなる位置においては結局、A点とC点の2点で上側の固定接点30と上側の可動接点板31がほぼ同時に接触する。
【0065】具体的には操作レバー34を例えば60度方向に傾けても操作軸がその方向では安定せず、上側の可動接点板31の端部が蓋体27と線接触する45度方向に強制され、結局、A点とC点の2点で導電性弾性部材35を介して上側の固定接点30と上側の可動接点板31がほぼ同時に接触する。
【0066】なお、本実施の形態においては、操作レバーと駆動体を別体とし、操作レバーを上方から押した場合には、常開スイッチS1のみをオンすることによって、そのプッシュ動作を検知する。従って上記の通り若干傾けた状態でプッシュ動作してもスイッチS1のみが信号を発するので有効であるが、プッシュ動作を検知しないタイプにおいても有効であり、すなわち、非動作状態で振動が加わって操作レバーが微少に振動したとしても、方位信号を出力することがない。
【0067】
【発明の効果】本発明は、以上説明したような形態で実施され、以下に記載されるような効果を奏する。
【0068】請求項1記載のように構成すると、第1(下側)の可動接点板と第1(下側)の固定接点間の接離動作と、第2(上側)の可動接点板と第2(上側)の固定接点群間の接離動作が共に確実になるため、導通不良を解消することができ、しかも、下側の固定接点と上側の固定接点群を別々の部材に振り分けることができるため、多方向入力装置の小型化を図ることができる。
【0069】請求項2記載のように構成すると、第1の可動接点板と第2の可動接点板とをコイルばねを介して常時接続する導通路が形成されるため、多方向入力装置の全体構造を簡略化することができる。
【0070】請求項3記載のように構成すると、操作レバーをプッシュ動作した時に付勢部材からの力が操作レバーに作用しなくなるため、操作レバーを軽い力でプッシュ動作することができる。
【0071】請求項4記載のように構成すると、操作レバーから第1の可動接点板に過押圧力が作用しなくなるため、第1の可動接点板の損傷を防止することができる。
【0072】請求項5記載のように構成すると、第1の可動接点板が第1の可動接点板に接触した後も、弾性体が操作レバーの下端によりさらに圧縮されるため、操作レバーに傾倒方向のオーバーストロークを付与することができる。
【0073】請求項6記載のように構成すると、操作レバーが若干傾いても導電性弾性部材の働きにより導通状態が保持されるから、不用意にオフになることがなく、誤信号の発生が防止できる。また、振動が加わって操作レバーが微少に振動したときに、導電性弾性部材の働きにより導通状態が保持され、接点が振動の度毎に離れることなく、誤信号の発生が防止できる。
【0074】請求項7記載のように構成すると、導電性弾性部材の厚さが薄くでき、導電性弾性部材の介在による嵩高が抑制できる。
【0075】請求項8記載のように構成すると、導電性弾性部材の取付けが簡単にできるなどの特長を有している。
【図面の簡単な説明】
【図1】本発明の第1の実施の形態に係る多方向入力装置の平面図である。
【図2】その多方向入力装置の正面図である。
【図3】その多方向入力装置の非操作状態を示す断面図である。
【図4】その多方向入力装置の傾倒動作を示す断面図である。
【図5】その多方向入力装置のプッシュ動作を示す断面図である。
【図6】その多方向入力装置のハウジングの平面図である。
【図7】その多方向入力装置の駆動体と第2の可動接点板の平面図である。
【図8】その多方向入力装置のガイド部材の平面図である。
【図9】その多方向入力装置の蓋体の底面図である。
【図10】本発明の第2の実施の形態に係る多方向入力装置の非操作状態での断面図である。
【図11】その多方向入力装置のハウジングの平面図である。
【図12】その多方向入力装置の上側の可動接点板の平面図である。
【図13】その多方向入力装置の上側の固定接点を取り付けた蓋体の底面図である。
【図14】その多方向入力装置の導電性弾性部材の平面図である。
【図15】その導電性弾性部材の断面図である。
【図16】その多方向入力装置の押圧部材の平面図である。
【図17】その押圧部材の断面図である。
【図18】その押圧部材の底面図である。
【図19】その多方向入力装置のゴム弾性体の平面図である。
【図20】そのゴム弾性体の断面図である。
【図21】そのゴム弾性体の底面図である。
【図22】その多方向入力装置の微少の傾倒状態を示す断面図である。
【図23】その多方向入力装置の傾倒動作を示す断面図である。
【図24】この実施の形態に係る多方向入力装置の動作原理を説明するための図である。
【符号の説明】
1,21 ハウジング
2,22 下側の固定接点
3,23 コモン接点
4,24 下側の可動接点板
5 ガイド部材
6,26 ゴム弾性体
7,27 蓋体
8,28 収納空間
10,30 上側の固定接点
11,31 上側の可動接点板
12,32 コイルばね
13,33 駆動体
14,34 操作レバー
35 導電性弾性部材
S1 常開スイッチ
S2 常閉スイッチ
【特許請求の範囲】
【請求項1】 収納空間を介して一体化された上側部材および下側部材と、前記収納空間の内部に傾倒可能に保持され、前記上側部材を貫通して外部に突出する操作レバーと、前記下側部材に設けられた第1の固定接点と、この第1の固定接点に対向する第1の可動接点板と、前記上側部材に周方向に所定の間隔をおいて設けられた第2の固定接点群と、これら第2の固定接点群に対向する第2の可動接点板と、この第2の可動接点板を前記第2の固定接点群に圧接する付勢部材とを備え、前記操作レバーの傾倒時に、前記第1の可動接点板が第1の固定接点に接触すると共に、前記第2の可動接点板が前記第2の固定接点群のうちの1つまたは2つの第2の固定接点を傾倒支点として残りの第2の固定接点から離れるように構成したことを特徴とする多方向入力装置。
【請求項2】 請求項1記載において、前記付勢部材が導電性のコイルばねから成り、このコイルばねの一端を前記下側部材に設けたコモン接点に接触させると共に、他端を前記第2の可動接点板に接触させたことを特徴とする多方向入力装置。
【請求項3】 請求項1または2記載において、前記第1の可動接点板を前記操作レバーの下端と前記下側部材との間に設け、前記操作レバーにスプライン結合した駆動体に前記第2の可動接点板を固定したことを特徴とする多方向入力装置。
【請求項4】 請求項3記載において、前記上側部材と前記下側部材のいずれか一方に前記第2の可動接点板の傾倒量を規制するストッパを設けたことを特徴とする多方向入力装置。
【請求項5】 請求項1記載において、前記操作レバーの下端と前記第1の可動接点板との間に弾性体を介設したことを特徴とする多方向入力装置。
【請求項6】 収納空間を介して一体化された上側部材および下側部材と、前記収納空間の内部に傾倒可能に保持され、前記上側部材を貫通して外部に突出する操作レバーと、前記上側部材に周方向に所定の間隔をおいて設けられた固定接点群と、この固定接点群に対向するように配置され、前記操作レバーと共に傾倒する可動接点板と、この可動接点板を前記固定接点群に圧接する付勢部材と、前記可動接点板と固定接点群の間に介在された導電性の弾性部材とを備え、前記操作レバーの非操作時には、前記付勢部材により前記弾性部材を介して可動接点板が全ての固定接点群と導通しており、前記操作レバーが所定角度以上傾倒すると、前記固定接点群のうちの1つまたは2つの第2の固定接点を傾倒支点として前記可動接点板が傾倒して、固定接点群のうちの傾倒支点になっていない固定接点と可動接点板との間の導通が断たれるように構成されていることを特徴とする多方向入力装置。
【請求項7】 請求項6記載において、前記弾性部材が金属板からなり、前記各固定接点に向けて延びた脚部を有することを特徴とする多方向入力装置。
【請求項8】 請求項6または7記載において、前記操作レバーにスプライン結合した駆動体を設け、その駆動体に前記可動接点板と弾性部材が係止されていることを特徴とする多方向入力装置。
【請求項1】 収納空間を介して一体化された上側部材および下側部材と、前記収納空間の内部に傾倒可能に保持され、前記上側部材を貫通して外部に突出する操作レバーと、前記下側部材に設けられた第1の固定接点と、この第1の固定接点に対向する第1の可動接点板と、前記上側部材に周方向に所定の間隔をおいて設けられた第2の固定接点群と、これら第2の固定接点群に対向する第2の可動接点板と、この第2の可動接点板を前記第2の固定接点群に圧接する付勢部材とを備え、前記操作レバーの傾倒時に、前記第1の可動接点板が第1の固定接点に接触すると共に、前記第2の可動接点板が前記第2の固定接点群のうちの1つまたは2つの第2の固定接点を傾倒支点として残りの第2の固定接点から離れるように構成したことを特徴とする多方向入力装置。
【請求項2】 請求項1記載において、前記付勢部材が導電性のコイルばねから成り、このコイルばねの一端を前記下側部材に設けたコモン接点に接触させると共に、他端を前記第2の可動接点板に接触させたことを特徴とする多方向入力装置。
【請求項3】 請求項1または2記載において、前記第1の可動接点板を前記操作レバーの下端と前記下側部材との間に設け、前記操作レバーにスプライン結合した駆動体に前記第2の可動接点板を固定したことを特徴とする多方向入力装置。
【請求項4】 請求項3記載において、前記上側部材と前記下側部材のいずれか一方に前記第2の可動接点板の傾倒量を規制するストッパを設けたことを特徴とする多方向入力装置。
【請求項5】 請求項1記載において、前記操作レバーの下端と前記第1の可動接点板との間に弾性体を介設したことを特徴とする多方向入力装置。
【請求項6】 収納空間を介して一体化された上側部材および下側部材と、前記収納空間の内部に傾倒可能に保持され、前記上側部材を貫通して外部に突出する操作レバーと、前記上側部材に周方向に所定の間隔をおいて設けられた固定接点群と、この固定接点群に対向するように配置され、前記操作レバーと共に傾倒する可動接点板と、この可動接点板を前記固定接点群に圧接する付勢部材と、前記可動接点板と固定接点群の間に介在された導電性の弾性部材とを備え、前記操作レバーの非操作時には、前記付勢部材により前記弾性部材を介して可動接点板が全ての固定接点群と導通しており、前記操作レバーが所定角度以上傾倒すると、前記固定接点群のうちの1つまたは2つの第2の固定接点を傾倒支点として前記可動接点板が傾倒して、固定接点群のうちの傾倒支点になっていない固定接点と可動接点板との間の導通が断たれるように構成されていることを特徴とする多方向入力装置。
【請求項7】 請求項6記載において、前記弾性部材が金属板からなり、前記各固定接点に向けて延びた脚部を有することを特徴とする多方向入力装置。
【請求項8】 請求項6または7記載において、前記操作レバーにスプライン結合した駆動体を設け、その駆動体に前記可動接点板と弾性部材が係止されていることを特徴とする多方向入力装置。
【図1】


【図3】
【図2】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図15】
【図16】

【図13】
【図14】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図3】
【図2】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図15】
【図16】
【図13】
【図14】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【公開番号】特開平11−73852
【公開日】平成11年(1999)3月16日
【国際特許分類】
【出願番号】特願平10−189356
【出願日】平成10年(1998)7月3日
【出願人】(000010098)アルプス電気株式会社 (4,263)
【公開日】平成11年(1999)3月16日
【国際特許分類】
【出願日】平成10年(1998)7月3日
【出願人】(000010098)アルプス電気株式会社 (4,263)
[ Back to top ]