
多方向操作部材およびそれを備える電子機器

【課題】多方向への操作が可能であると共に、移動した先でもクリック動作が可能な多方向操作部材およびそれを備える電子機器を提供する。
【解決手段】導電部材13の近接により静電容量を変化させる導電性のセンサ部21,22を有する基板20と、基板20の面に対して略水平に移動可能である操作部10とを有し、操作部10は、基板20側に開口部16を対向させるドーム部14と、開口部16の外周縁から外側へ延出する延出部15とを有すると共に、センサ部21,22と非接触状態の導電部材13を備え、センサ部21,22は、ドーム部14の頂点と押圧方向で重なる位置に設けられた中心センサ部21と、中心センサ部21の外側に設けられる1以上の外周センサ部22と、を有する多方向操作部材4としている。
【解決手段】導電部材13の近接により静電容量を変化させる導電性のセンサ部21,22を有する基板20と、基板20の面に対して略水平に移動可能である操作部10とを有し、操作部10は、基板20側に開口部16を対向させるドーム部14と、開口部16の外周縁から外側へ延出する延出部15とを有すると共に、センサ部21,22と非接触状態の導電部材13を備え、センサ部21,22は、ドーム部14の頂点と押圧方向で重なる位置に設けられた中心センサ部21と、中心センサ部21の外側に設けられる1以上の外周センサ部22と、を有する多方向操作部材4としている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数の方向に操作可能な多方向操作部材およびそれを備える電子機器に関する。
【背景技術】
【0002】
従来から、車載用機器、パーソナルコンピュータ、リモートコントローラおよび音響機器等の電子機器において、多方向に操作可能な入力装置が用いられている(たとえば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−153233号公報(特許請求の範囲等)
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の入力装置では、所望の方向へ操作することができると共に、操作面に対して操作キーの略中央部分で、クリック感を伴う押圧動作ができる。しかし、特許文献1に記載の入力装置では、押圧動作を行うために一旦操作キーを中央部分に戻す必要があるので、キーを移動した先では、クリック動作を行うことができないという問題がある。
【0005】
本発明は、かかる問題を解消すべくなされたものであって、多方向への操作が可能であると共に、キーを移動した先でもクリック動作が可能な多方向操作部材およびそれを備える電子機器を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の多方向操作部材の一実施の形態は、導電部材の近接により静電容量を変化させる導電性のセンサ部を有する基板と、基板の面に対して略水平に移動可能である操作部と、を有し、操作部は、基板側に開口部を対向させるドーム部と、開口部の外周縁から外側へ延出する延出部とを有すると共に、センサ部と非接触状態の導電部材を備え、センサ部は、ドーム部の頂点と押圧方向で重なる位置に設けられた中心センサ部と、中心センサ部の外側に設けられる1以上の外周センサ部と、を有している。
【0007】
また、操作部は、基板の面に対して略水平に移動させると定位置に付勢する伸縮部材により支持され得る。
【0008】
また、延出部の基板側の面には、基板側に突出する突出部が設けられ得る。
【0009】
また、外周センサ部は、中心センサ部の中心を基準として周方向に略90度の角度を成して4箇所に配置され得る。
【0010】
また、操作面に略水平に移動可能であると共に、ユーザーが指で触れた位置を少なくとも検出可能な入力部材が操作部の表面側に固着され得る。
【0011】
また、本発明の電子機器の実施の形態は、導電部材の近接により静電容量を変化させる導電性のセンサ部を有する基板と、基板の面に対して略水平に移動可能である操作部と、を有し、操作部は、基板側に開口部を対向させるドーム部と、開口部の外周縁から外側へ延出する延出部とを有すると共に、センサ部と非接触状態の導電部材を備え、センサ部は、ドーム部の頂点に押圧方向で重なる位置に設けられた中心センサ部および中心センサ部の外側に設けられる1以上の外周センサ部を備える多方向操作部材と、導電性のセンサ部における静電容量を検出すると共に、静電容量に応じてドーム部の押込みの有無および操作部の位置を特定する制御する制御部とを有している。
【0012】
さらに、外周センサ部は、中心センサ部の中心を基準として周方向に略90度の角度を成すように4箇所に配置され、制御部は、それら4枚の外周センサ部においてそれぞれ検出された静電容量と外周センサ部の配置方向とに基づいて、操作板の移動方向あるいは移動量を特定し得る。
【0013】
さらに、操作面に略水平に移動可能であると共に、ユーザーが指で触れた位置を少なくとも検出可能な入力部材が操作部の表面側に固着され得る。
【0014】
さらに、多方向操作部材は、キーボードに隣接して設けられ得る。
【発明の効果】
【0015】
本発明によれば、多方向への操作が可能であると共に、キーを移動した先でもクリック動作が可能な多方向操作部材およびそれを備える電子機器を提供できる。
【図面の簡単な説明】
【0016】
【図1】本発明の第1の実施の形態に係る多方向操作部材を備える電子機器の斜視図である。
【図2】本発明の第1の実施の形態に係る多方向操作部材を構成する操作部の斜視図である。
【図3】本発明の第1の実施の形態に係る多方向操作部材を構成する基板およびシート部材の分解斜視図である。
【図4】本発明の第1の実施の形態に係る多方向操作部材を、図1のA−A線で切断した場合の断面図である。
【図5】図4に示す多方向操作部材が有する基板を操作面側から見た場合であって、導電部材の位置との関係を示す平面図である。
【図6】本発明の第1の実施の形態に係る電子機器としてのリモートコントローラの模式的な構成を示すブロック図である。
【図7】図4に示す多方向操作部材の操作板が押圧された状態を示す図であって、図4と同様の断面図である。
【図8】図7に示す多方向操作部材の基板を操作面側から見た平面図である。
【図9】図4に示す多方向操作部材の操作板をX方向にスライドした状態を示す図であって、図4と同様の断面図である。
【図10】図9で示す多方向操作部材の基板を操作面側から見た平面図である。
【図11】図4に示す多方向操作部材の操作板をX方向とY方向の中間方向に移動させた状態で、基板を操作面側から見た平面図である。
【図12】本発明の第2の実施の形態に係る多方向操作部材の斜視図である。
【図13】図12に示す多方向操作部材の分解斜視図である。
【図14】本発明の第2の実施の形態に係る多方向操作部材を、図12のB−B線で切断した場合の断面図である。
【図15】本発明の第3の実施の形態に係る多方向操作部材を備える電子機器の斜視図である。
【図16】本発明の第3の実施の形態に係る多方向操作部材を、図15のC−C線で切断した場合の断面図である。
【図17】図16に示す多方向操作部材を、Dで示す領域について拡大して示す拡大断面図である。
【図18】本実施の形態の変形例における基板を表面側から見た平面図である。
【図19】図18に示す変形例と異なる変形例における基板を表面側から見た平面図である。
【図20】図18および図19に示す各変形例と異なる変形例における基板を表面側から見た平面図である。
【図21】本実施の形態の変形例に係る多方向操作部材の記憶部が有する制御用テーブルの一例である。
【発明を実施するための形態】
【0017】
次に、本発明の各実施の形態に係る多方向操作部材およびそれを備える電子機器について、図面を参照しながら説明する。以下の各実施の形態では、電子機器としてテレビ用のリモートコントローラを例に説明するが、電子機器は、リモートコントローラ以外の機器、例えば、モバイルコンピュータ、音楽再生用端末、携帯テレビ、車載用オーディオ機器あるいは携帯電話等であっても良い。
【0018】
1.第1の実施の形態
(多方向操作部材の構造)
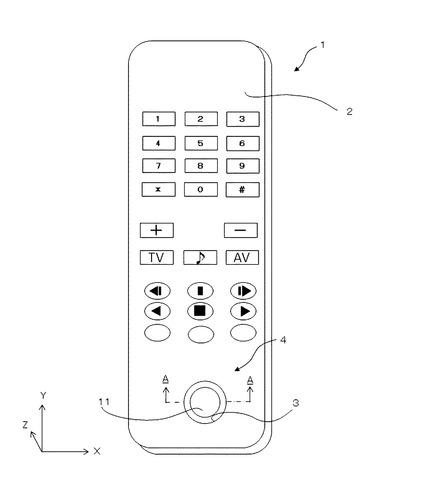
図1は、第1の実施の形態に係る電子機器の一例であるリモートコントローラ1の斜視図である。図1に示すように、リモートコントローラ1は、本発明の第1の実施の形態に係る多方向操作部材4を備える。以後、操作面側(図1の紙面手前側)を表面側、操作面と逆の面側(図1の紙面奥側)を裏面側という。また、各図において、図1の紙面右方向をX方向、紙面上方向をY方向として説明する。また、各図において、操作面に対して垂直に裏から表へ向かう方向をZ方向として説明する。
【0019】
図1に示すように、リモートコントローラ1は、略長方形状の筺体2に覆われている。また、図1では、リモートコントローラ1の操作面は、XY平面に平行な面である。リモートコントローラ1の操作面には、円形の穴部3が設けられ、その穴部3から、多方向操作部材4の操作板11が露出している。
【0020】
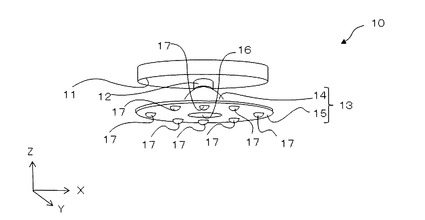
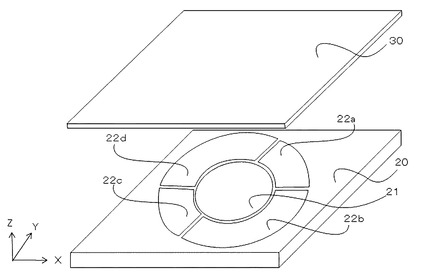
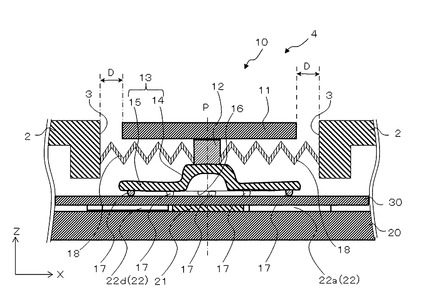
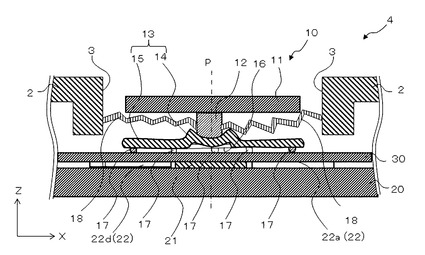
図2は、多方向操作部材4を構成する操作部10の斜視図である。図3は、多方向操作部材4を構成する基板20およびシート部材30の分解斜視図である。図4は、図1のA−A線に沿って操作面に対して垂直な面で多方向操作部材4を切断した場合の断面図である。なお、以後の各断面図では、見易さを考慮して各部材の厚さの比率を実際の比率と変えて図示している。
【0021】
多方向操作部材4は、操作部10、基板20および基板20の操作面側に設けられる絶縁層としてのシート部材30を主に有する。操作部10は、リモートコントローラ1の操作面側に露出する操作板11、操作板11の裏面側に設けられる押圧子12および押圧子12を介して操作板11に固着される導電部材13を主に有する。
【0022】
操作板11は、ユーザーが操作する部分であり、樹脂、金属、ガラス、セラミックスあるいはそれらの1種以上のコンポジット等から主に形成できる。操作板11としては、たとえば、外周円の直径が10〜30mmで厚さが約1mmの円板状の部材を用いることができる。操作板11は、何の操作も行われていない状態では、操作面から見て、筺体2に設けられた円形の穴部3の略中央に配置されている。ユーザーは、操作板11を基板20の表面に対して略水平にも操作できるし、基板20方向へ押圧操作を行うこともできる。なお、本明細書において、「略水平」とは、XY平面に平行な表面を有する基板20に対して、XY成分方向への移動を意味する。また、Z方向への操作板11の変位を伴いながら、XY成分方向への移動を行う場合にも、「略水平に移動」という語に含まれるものとする。操作板11の外周面と穴部3の内周面とは、非操作状態において、2〜7mm程度の間隙Dで離間している。本明細書では、操作面側から見た場合に、操作板11の外周円から見た中心を「中心P」という。
【0023】
押圧子12は、操作板11の中心から、基板20方向に突出する部分である。押圧子12は、操作板11と一体に形成されていてもよいし、別体として操作板11の裏面に接着あるいは融着等されていてもよい。また、押圧子12は、多方向操作部材4にとって必須の構成ではないが、押圧子12を有する操作板11とすることで、導電部材13に押圧力を伝えやすくなる。
【0024】
導電部材13は、ドーム部14および延出部15を主に有する。ドーム部14は、操作面側から所定の荷重以上で座屈するような逆椀状の部材である。ドーム部14の頂点部分は、押圧子12の端部に固着されている。延出部15は、ドーム部14の開口部16の外周縁からドーム部14の径方向外側に延出する部分である。
【0025】
導電部材13は、好ましくは、金属等の導電体により形成され、ドーム部14および延出部15が一体として形成されている。ただし、導電部材13は、その全部が導電性の材料から形成されている必要はない。たとえば、PET等の樹脂にてドーム部14および延出部15の形状を一体として形成し、ドーム部14および延出部15の表面もしくは裏面の一部または全部を導電性の材料、たとえば、金属等で覆ってもよい。さらに、樹脂製のドーム部14および延出部15の内部に、導電部材13を挟んでも良い。
【0026】
延出部15の基板20側の面は、基板20と略平行であると共に、基板20と離間している。延出部15の基板20側の面には、基板20の方向へ突出する8個の突出部17が設けられている。突出部17は、中心Pを基準に周方向に45度間隔で設けられている。操作部10は、突出部17をシート部材30に接触させた状態で立設する。突出部17は、同一の大きさの半球体であるため、基板20と延出部15の裏面との間隔を一定に維持することができる。また、操作部10を動かしたときに、操作部10は、シート部材30上をスムーズに移動可能である。
【0027】
押圧子12の側面には、蛇腹状の伸縮部材18が固着されている。伸縮部材18の操作板11側と逆側の端部は、リモートコントローラ1の筺体2に固着されている。伸縮部材18は、操作部10を穴部3内で動かしたときに、操作部10の動きに伴い伸縮する。伸縮部材18は、その伸縮に伴い、操作部10が穴部3のほぼ中心に位置する方向へ付勢する部材である。伸縮部材18は、操作板11の側面あるいは裏面に固着しても良い。操作部10は、伸縮部材18が伸縮することで基板20に対して水平移動できる。さらに、操作板11が表面側から裏面方向に押圧される(すなわち、クリックされる)ことにより、伸縮部材18は、基板20の方向に撓むこともできる。したがって、操作板11が押圧されると、操作板11は、押圧子12の下方に設けられたドーム部14を押し込み、ドーム部14を座屈させることができる。なお、本明細書において、「クリック」とは、押圧により操作用部材を押し下げる動作のことをいう。また、キーを押し下げていった場合に、ある地点でその押圧力に対する抵抗力が急に小さくなることで、ユーザーがクリックしたという感触を得られるが、その感触を「クリック感」という。
【0028】
伸縮部材18は、柔軟性に富む弾性体、たとえば、ウレタン樹脂、熱可塑性エラストマー、シリコーンゴム等の熱硬化性エラストマーあるいは天然ゴム等から成るシートから構成されるのが好ましい。それらの材料の中でも、熱可塑性エラストマーに含まれる耐久性に優れたウレタン系エラストマーから成る蛇腹状部材を用いるのが好ましい。なお、操作部10の平行移動あるいは操作板11のクリックによる上下移動に十分追随することができる程度に伸縮可能な部材から伸縮部材18が構成されている場合には、伸縮部材18は、蛇腹形状でなくてもよい。
【0029】
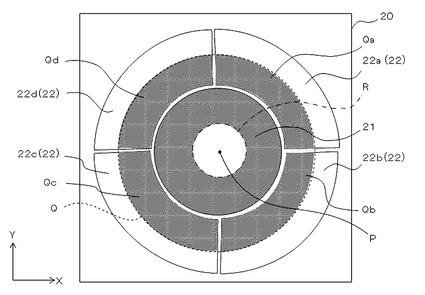
図5は、基板20を操作面側から見た平面図である。図5では、図4の状態の多方向操作部材4について、延出部15の外周縁を破線Qで示し、開口部16の外周縁を破線Rで示している。さらに、ドーム部14の頂点と対向する位置をPで示している。
【0030】
基板20には、センサ部として、円形の中心センサ部21および中心センサ部21を囲む外周センサ部22a、外周センサ部22b、外周センサ部22cおよび外周センサ部22d(総称する場合には、「外周センサ部22」と称する)が主に設けられている。基板20としては、たとえば、印刷回路基板を用いることができる。
【0031】
中心センサ部21は、操作面から見て円形である。また、中心センサ部21の半径は、操作板11の外周と穴部3の内壁との間隙Dよりも大きい。したがって、操作板11が穴部3の内壁に接するまで移動した場合であっても、操作板11の中心Pは、中心センサ部21とZ方向で重なる。また、中心センサ部21の半径は、ドーム部14の外周縁の半径に間隙Dを加えた距離と同一若しくはそれよりも大きいのがより好ましい。かかる場合には、操作部10の移動により、ドーム部14が、外周センサ部22とZ方向で重なることがない。外周センサ部22にドーム部14が重ならないので、外周センサ部22で検出される静電容量値は、外周センサ部22に対向する延出部15のZ方向への投影面積のみにより増減する。
【0032】
外周センサ部22は、環状のセンサ部を4つに分割した弧状のセンサ部である。外周センサ部22は、中心センサ部21の中心を基準にY方向から周方向に略90度で分割され、時計回りで、外周センサ部22a、外周センサ部22b、外周センサ部22cおよび外周センサ部22dの4つに分割されている。なお、本明細書において、「略90度」とは、90度を中心として、誤差とみなせる範囲を含み、具体的には、85度から95度程度であればよい。中心センサ部21の中心を基準にY方向から周方向に略90度で外周センサ部22が分割されている場合には、操作板11をXY平面に略水平などの方向へ移動させた場合にも、その操作方向を特定するのが容易になる。外周センサ部22a、外周センサ部22b、外周センサ部22cおよび外周センサ部22dは、操作面から見て、それぞれ同程度の面積を有している。外周センサ部22の外周の半径は、好ましくは、間隙Dに延出部15の外周の半径を加えた距離と同一若しくはそれより大きい。かかる場合には、操作板11が穴部3の内壁に接するまで移動した場合であっても、延出部15の外周が、外周センサ部22の外周よりも外側に飛び出すことがない。外周センサ部22の外周よりも導電部材13が飛び出さないので、外周センサ部22で検出される静電容量値は、延出部15の移動量(すなわち、延出部15の外周が中心センサ部21の中心からの離間距離)が大きくなる程、増加する。
【0033】
たとえば、中心センサ部21および外周センサ部22の領域には、基板20の上に金属薄膜等で電導膜(不図示)が積層されている。電導膜には、電極(不図示)が電気的に接続されている。電極は、電導膜に所定の電圧を印加すると共に、電導膜とグランドとの間の静電容量Cdの変化を検出する回路に接続されている。
【0034】
シート部材30は、絶縁性の部材から構成されるシートである。シート部材30は、基板20と操作部10との間に存在していれば、基板20の表面に設けられてもよいし、あるいは、操作部10の裏面側に設けられても良い。また、本明細書において「絶縁性」あるいは「絶縁」とは、実質的に直流電流を通さない性質を指し、たとえば、電気抵抗値が102Ω・m以上の性質をいう。さらに、シート部材30としては、高い誘電率を有する部材を好適に用いることができる。シート部材30は、中心センサ部21および外周センサ部22と、導電部材13とが電気的に導通しないように設けられる。また、シート部材30は、導電部材13と、中心センサ部21および外周センサ部22の電導膜との間の誘電体としての役割を有する。シート部材30は、好ましくは、耐摩耗性に優れ、摩擦係数が比較的低い部材により構成される。たとえば、厚さ0.1mmのテトラフルオロエチレン製のシートをシート部材30として用いることができる。フッ素樹脂等を主に含むシート部材30とすることで、導電部材13がより滑らかにシート部材30の上を移動できると共に、ドーム部14に設けられた突出部17が摩耗しにくくなる。
【0035】
中心センサ部21および外周センサ部22が設けられた領域に、導電部材13がZ方向で重なると、中心センサ部21および外周センサ部22上の電導膜(不図示)と導電部材13とが、コンデンサとして機能する。当該コンデンサの静電容量Cdは、Cd=εA/d(ε;2電極間の誘電率、A;2電極間の対向面積、d;2電極間の間隙の距離)にて表わされる。したがって、中心センサ部21あるいは外周センサ部22に対向する導電部材13の面積の増減(上述の式“A”の変化)、あるいは、ドーム部14と中心センサ部21との対向距離の増減(上述の式“d”の変化)により、静電容量Cdが変化する。たとえば、中心センサ部21あるいは外周センサ部22と導電部材13との距離が小さくなることで、静電容量Cdが増加する。また、中心センサ21あるいは外周センサ部22と対向する導電部材13の面積が大きくなると、静電容量Cdが増加する。
【0036】
上述のような多方向操作部材4とすることで、操作部10が平行移動できると共に、その平行移動した先で操作板11を押し込むことができる。また、ユーザーが、操作板11をクリックした際には、ドーム部14が座屈することで、ユーザーは、クリック感を得ることができる。さらに、上述のような多方向操作部材4では、操作板11を押し下げた状態のまま操作板11を所望の方向へ移動させることができる。
【0037】
(電子機器の構造)
図6は、本発明の第1の実施の形態に係る電子機器としてのリモートコントローラ1の模式的な構成を示すブロック図である。
【0038】
リモートコントローラ1は、多方向操作部材4からの入力に従いリモートコントローラ1を制御する制御部40を有する。制御部40は、記憶部41、CPU(Central Processing Unit)42、検出部43等を有する。記憶部41としては、たとえば、RAM(Random Access Memory)、ROM(Read Only Memory)あるいはハードディスクドライブなどの記録媒体で構成され、制御プログラム、検出された静電容量Cに基づき判断処理するための数式あるいはテーブル等を記憶する。制御部40は、たとえば、CPU42が記憶部41に記憶された図示外の制御プログラムを、実行することで種々の処理を行うことができる。この制御プログラムは、リモートコントローラ1の出荷前にRAM等に記憶されたものであっても、リモートコントローラ1の出荷後に記憶されたものであってもよい。
【0039】
制御部40は、中心センサ部21および外周センサ部22の静電容量あるいは静電容量の変化に応じてリモートコントローラ1からの各種の信号を出力することができる。制御部40は、多方向操作部材4の内部に設けられていてもよいし、多方向操作部材4の外部であって、リモートコントローラ1の内部に設けられていてもよい。さらに、リモートコントローラ1の外部に、制御部40が設けられていてもよい。
【0040】
制御部40は、中心センサ部21および外周センサ部22に電圧を印加し(電圧を印加するための電源は不図示)、それらの静電容量Cを検出する検出部43を有する。また、制御部40は、検出部43から得られた静電容量Cの値に基づきドーム部14の押込の有無および操作部10の位置を特定する判断部として機能する。以後、外周センサ部22aにおける静電容量をC1、外周センサ部22bにおける静電容量をC2、外周センサ部22cにおける静電容量をC3、外周センサ部22dにおける静電容量をC4、中心センサ部21における静電容量をC5とする。制御部40は、たとえば、外周センサ部22aで検出された静電容量C1を、C1のスカラー量を有するX方向とY方向との合成方向成分を有するベクトルb1、外周センサ部22bで検出された静電容量C2をC2のスカラー量を有するX方向と−Y方向との合成方向成分を有するベクトルb2、外周センサ部22cで検出された静電容量C3をC3のスカラー量を有する−Y方向と−X方向との合成方向成分を有するベクトルb3、外周センサ部22dで検出された静電容量C4を、−X方向とY方向との合成方向成分を有するベクトルb4に置き換えて、それらの各ベクトルb1,b2,b3,b4をベクトル合成し、得られた合成ベクトルにより操作方向および操作量を特定することができる。
【0041】
次に、多方向操作部材4の動作および制御部40の処理について説明する。
【0042】
(多方向操作部材の動作および制御部の動作)
図7は、図4に示す多方向操作部材4の操作板11が押圧された状態を示す図であって、図4と同様の断面図である。また、図8は、図7に示す多方向操作部材4の基板20を操作面側から見た平面図である。図8では、延出部15の外周縁が対向する位置を破線Qで示し、延出部15と対向する領域を網掛けにて示している。また、延出部15と外周センサ部22aとの対向領域をQa、延出部15と外周センサ部22bとの対向領域をQb、延出部15と外周センサ部22cとの対向領域をQc、および延出部15と外周センサ部22dとの対向領域をQdとして図示している。また、ドーム部14の頂上と対向する位置をPで示し、ドーム部14の開口部16の外周縁が対向する位置を一点鎖線Rで示している。
【0043】
図7に示すように、操作板11を基板20方向に押圧すると、ドーム部14が座屈する。ドーム部14の座屈により、図8のRで囲まれる領域にて、ドーム部14と中心センサ部21との距離が小さくなり、中心センサ部21における静電容量C5が増加する。制御部40は、中心センサ部21における静電容量C5が所定の閾値を超えたことを検出すると、制御部40は、多方向操作部材4がクリックされたと認識できる。逆に、ユーザーが操作板11の押圧を止めると、ドーム部14が元の形に戻るため、Rで示される部分と中心センサ部21との距離dが大きくなるので、静電容量C5が減少する。静電容量C5が所定の閾値を下回っているときには、制御部40は、操作板11は、押圧されていないと認識できる。
【0044】
また、制御部40は、各外周センサ部22における静電容量C1,C2,C3,C4を同時あるいは略同時に検出する。図8に示すように、ドーム部14の頂点Pが中心センサ部21の中心と略同一の場合には、Qa,Qb,Qc,Qdは、すべて同程度の面積を有する(すなわち、Qa=Qb=Qc=Qd)。したがって、各外周センサ部22における静電容量は、略同等(すなわち、C1=C2=C3=C4)となる。制御部40は、これらの静電容量に応じてベクトルb1,b2,b3,b4を生成する。C1=C2=C3=C4の場合には、これらのベクトルb1,b2,b3,b4をベクトル合成すると、各ベクトルが打ち消しあって0になる。したがって、制御部40は、操作板11の中心Pが動いていない、すなわち、操作板11の中心Pが中心センサ部21の中心とほぼ重なる位置にあると判断する。
【0045】
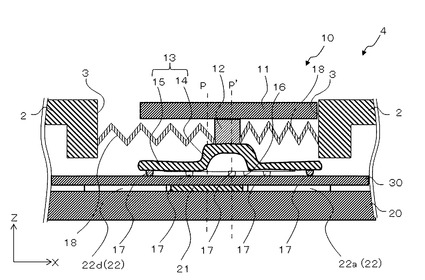
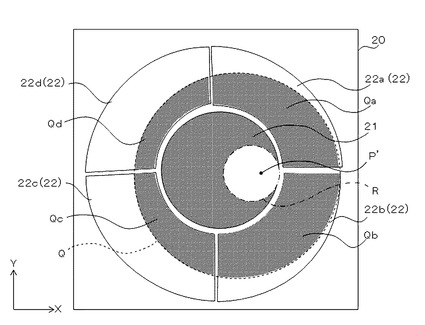
図9は、図4に示す多方向操作部材4の操作板11をX方向にスライドした状態を示す図であって、図4と同様の断面図である。図10は、図9に示す多方向操作部材4の基板20を操作面側から見た場合の平面図である。図10では、延出部15の外周縁が対向する位置を破線Qで示し、延出部15と対向する領域を網掛けにて示している。また、延出部15と外周センサ部22aとの対向領域をQa、延出部15と外周センサ部22bとの対向領域をQb、延出部15と外周センサ部22cとの対向領域をQc、および延出部15と外周センサ部22dとの対向領域をQdとして図示している。また、開口部16の外周縁と対向する位置を一点鎖線Rで示し、ドーム部14の頂点と対向する位置をP’で示している。
【0046】
図10に示すように、操作板11をX方向に移動させた場合には、QaとQbとは、同程度の面積である(すなわち、Qa=Qb)。一方、QcとQdとが同程度の面積である(すなわち、Qa=Qb)。また、QaあるいはQbは、QcおよびQdよりも面積が大きい。上述のように、図9および図10に示す状態では、(Qa=Qb)>(Qc=Qd)という関係が成立するので、各外周センサ部22にて検出される静電容量値は、(C1=C2)>(C3=C4)という関係が成り立つ。
【0047】
制御部40は、これらの静電容量に応じてベクトルb1,b2,b3,b4を生成し、これらをベクトル合成すると、(C1=C2)>(C3=C4)の場合には、合成ベクトルは、X方向成分のみのベクトルとなる。したがって、制御部40は、操作板11の中心Pは、X方向に移動されたと判断できる。
【0048】
図11は、図4に示す多方向操作部材4の操作板11をX方向とY方向との中間の方向(図11の紙面では右斜め上方向)に移動させた状態で、基板20を操作面側から見た平面図である。図11では、延出部15の外周縁が対向する位置を破線Qで示し、延出部15と対向する領域を網掛けにて示している。また、延出部15と外周センサ部22aとの対向領域をQa、延出部15と外周センサ部22bとの対向領域をQb、延出部15と外周センサ部22cとの対向領域をQc、および、延出部15と外周センサ部22dとの対向領域をQdとして図示している。また、ドーム部14と対向する領域を一点鎖線Rにて囲み、ドーム部14の頂上と対向する位置をP’’で示している。
【0049】
図11に示すように、X方向とY方向との中間の方向に操作板11がスライドした状態では、図8の状態を基準とすると、Qa>(Qb=Qd)>Qcの関係になる。したがって、図11の状態では、制御部40が各外周センサ部22にて検出する静電容量値は、C1>(C2=C4)>C3の関係となる。
【0050】
制御部40は、これらの静電容量に応じてベクトルb1,b2,b3,b4を生成し、これらをベクトル合成すると、C1>(C2=C4)>C3の場合には、合成ベクトルは、X方向とY方向との中間の方向成分を有する。したがって、制御部40は、操作板11の中心Pは、X方向とY方向との中間の方向に移動されたと判断できる。
【0051】
また、操作板11が紙面右斜め上方向にスライドされた状態でも、ドーム部14は、中心センサ部21と対向している。操作板11がX方向とY方向との中間の方向にスライドされた状態であっても、操作板11の押圧/非押圧により、図11に示すRの領域において中心センサ部21と導電部材13との距離dが変動する。そのため、制御部40は、所定の静電容量値よりもC5が大きいあるいは小さいかにより、操作板11がクリックされた状態にあるか否かを認識できる。
【0052】
上述のような多方向操作部材4では、操作方向を特定可能であると共に、操作した先でのクリック操作を検出することができる。また、ユーザーは、クリックしながら多方向への操作を行うことができる。さらに、ドーム部14の座屈により、ユーザーは、クリック感を得ることができる。
【0053】
たとえば、リモートコントローラ1でテレビ等の表示部のポインタを操作するのに、多方向操作部材4を用いることができる。その場合に、多方向操作部材4によりある方向へ操作板11が操作されたことを制御部40が検出した場合には、制御部40は、画面上に表示されたポインタをその操作方向に移動させるよう制御してもよい。また、多方向操作部材4によりクリック動作がなされたことを制御部40が検出した場合には、クリックされた際にポインタが指し示す表示を選択するように制御部40が制御してもよい。さらに、多方向操作部材4により、クリックしながらある方向へ操作されていることを制御部40が検出した場合には、いわゆる「ドラッグ動作」(画面上アイコン等を仮想的に「つかむ」操作のこと。たとえば、画面上でポインタがアイコンなどに重なった状態で、クリックし、クリック状態を維持したままポインタを移動させること。)を行うように制御部40が制御してもよい。
【0054】
2.第2の実施の形態
(多方向操作部材の構造)
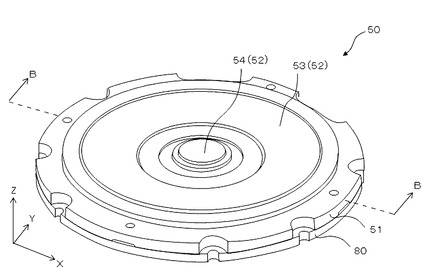
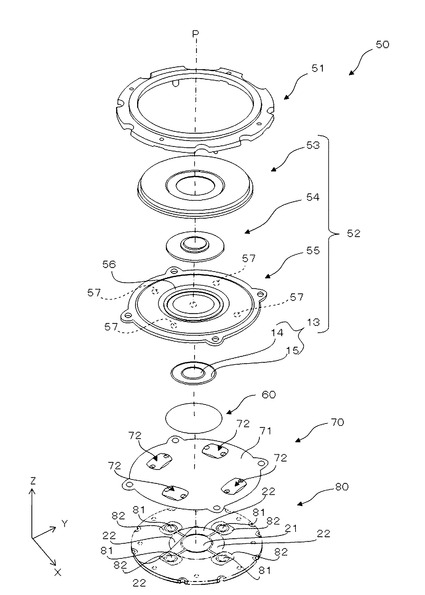
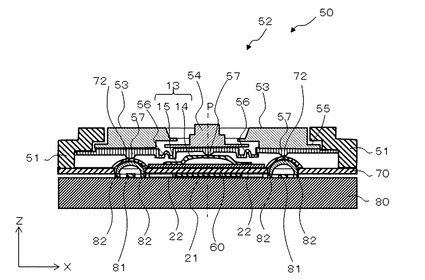
次に、第2の実施の形態に係る多方向操作部材50について、図面を参照しながら説明する。図12は、第2の実施の形態に係る多方向操作部材50の斜視図である。図13は、多方向操作部材50の分解斜視図である。図14は、多方向操作部材50を図12に示すB−B線で切断した場合の断面図である。第2の実施の形態に係る多方向操作部材50は、第1の実施の形態に係る多方向操作部材4とその構造が異なる。なお、第1の実施の形態に係る多方向操作部材4と同じ構成要素については、同じ番号を用いて説明する。
【0055】
多方向操作部材50は、表面側から、固定具51、操作部52、シート部材60、ドームシート70および基板80を主に有する。操作部52は、表面側から、第1の操作板53、第2の操作板54、キーパッド55、導電部材13を主に有する。
【0056】
固定具51は、リング状の部材であって、基板80の穴部に挿入できる突出部あるいは、固定具51と基板80とをねじ等で固定するためのねじ穴が設けられている。固定具51と基板80とがねじ等により固定されることで、その固定具51と基板80との間に、操作部52およびドームシート70の端部を固定できる。また、固定具51の内周部分は、裏面側が表面側に向かって凹んでいるので、第1の操作板53の外周部分が、その固定具51の内周部分の裏面側に入り込んでいる。
【0057】
操作部52を構成する第1の操作板53および第2の操作板54は、ユーザーが操作する部分であり、第1の実施の形態における操作板11と同様の材料から構成される。第1の操作板53は、環状の部材であり、第2の操作板54は、その内周面よりも小さい外周を有する円板状の部材である。第2の操作板54は、第1の操作板53の内側に配置される。第2の操作板54をXY平面上の様々な方向へ操作する際に、第1の操作板53を誤って押圧しないように、第1の操作板53の内周側は、その外周側よりも操作面から見て一段低く形成されている。一方、第2の操作板54の中心部分は、その外周側よりも表面側に突出している。
【0058】
操作部52を構成するキーパッド55は、第1の操作板53および第2の操作板54を支持する部材であり、伸縮部材として機能する。第1の操作板53および第2の操作板54は、キーパッド55の表面に接着剤、粘着剤あるいは融着等により固着されている。また、キーパッド55は、第1の操作板53および第2の操作板54が表面側から押圧された場合には、その下方に設けられた皿バネ部72および導電部材13等を押し込むことができるように、さらには、第2の操作板54が基板80の面に対して水平に移動した場合にもその移動に十分追随が可能であるように、伸縮可能な材料から構成されるのが好ましい。さらに好ましくは、キーパッド55は、第2の操作板54が基板80の面に対して水平移動した場合に、第2の操作板54を元の位置に付勢するような弾性部材から構成される。そのようなキーパッド55の材料としては、たとえば、シリコーンゴム、ウレタンゴム、イソプレンゴム、エチレンプロピレンゴム、天然ゴム、エチレンプロピレンジエンゴムあるいはスチレンブタジエンゴム等の熱硬化性エラストマー、ウレタン系、エステル系、スチレン系、オレフィン系、ブタジエン系あるいはフッ素系等の熱可塑性エラストマー、あるいはそれらの複合物等を用いることができる。それらの材料の中でも、耐久性が高いウレタン系エラストマー、シリコーンゴムあるいはそれらの複合物を用いるのが好ましい。
【0059】
キーパッド55は、第2の操作板54が基板80の面に対して水平に移動しやすいように、第2の操作板54が貼り付けられる部分の外周に折り曲げ部56が形成されていてもよい。また、折り曲げ部56は、一回以上折り曲げられることで、蛇腹形状が形成されていてもよい。折り曲げ部56が設けられている場合には、第2の操作板54が水平移動しやすい。さらに、折り曲げ部56が設けられている場合には、第2の操作板54の水平移動により、第1の操作板53が固着されている部分のキーパッド55が引っ張られにくいため、第1の操作板53とキーパッド55との固着部分が剥がれにくい。
【0060】
キーパッド55の裏面には、基板80方向へ突出する押圧子57が設けられている。押圧子57は、合計5個設けられている。押圧子57のうち1個は、第2の操作板54の外周円を基準とした中心Pと重なる位置に設けられている。残りの4個の押圧子57は、第1の操作板53に押圧方向で重なる位置であって、中心Pを基準とした同心円の周方向に沿うように90度間隔で1個ずつ設けられている。導電部材13は、第1の実施の形態における導電部材13と同様に、ドーム部14および延出部15が一体として形成されている導電性の部材である。また、導電部材13は、中心Pと重なる位置に設けられている押圧子57に、その頂点が固着されている。
【0061】
ドームシート70は、基板80の表面に沿う平坦部71と、平坦部71より突出して設けられた皿バネ部72とを有している。平坦部71のうち、基板80の第1接点部81および第2接点部82に対応する位置には、貫通孔が設けられている。皿バネ部72は、少なくとも裏面側が導電性の層により形成され、貫通孔を覆うように逆椀状に平坦部71に設けられている。多方向操作部材50が操作されていない状態においては、皿バネ部72の裏面は、第1接点部82と電気的に導通しているが、第2接点部81とは電気的に導通しないような状態で固定されている。この皿バネ部72は、押圧されて弾性変形することにより、皿バネ部72の頂点部内側が第2接点部81と接触して、第1接点部82と第2接点部81との間が導通する。一方、皿バネ部72の押圧が解除されると、皿バネ部72は、弾性により逆椀状に復元し、その頂点部内側が第2接点部81と離間する。
【0062】
基板80は、第1の実施の形態の基板20と同様に円形の中心センサ部21および中心センサ部21を囲む4つの外周センサ部22が設けられている。さらに、基板80の表面には、円形の第2接点部81および第2接点部81を囲むようにして設けられた第1接点部82が、4箇所設けられている。第2接点部81は、第1の操作板53に設けられた4つの押圧子57と押圧方向で重なる位置にそれぞれ設けられている。また、基板80の表面であって、基板80の外周センサ部22の外周円の内側と重なる領域には、シート部材70が配置されている。
【0063】
上述のような多方向操作部材50とすることで、第1の実施の形態に係る多方向操作部材4と同様に、操作部52が平行移動できると共に、その平行移動した先で第2の操作板54を押し込むことができる。また、ユーザーが、第2の操作板54をクリックした際には、ドーム部14が座屈することで、ユーザーは、クリック感を得ることができる。さらに、上述のような多方向操作部材50では、第2の操作板54を押し下げた状態のまま第2の操作板54を所望の方向へ移動させることができる。
【0064】
3.第3の実施の形態
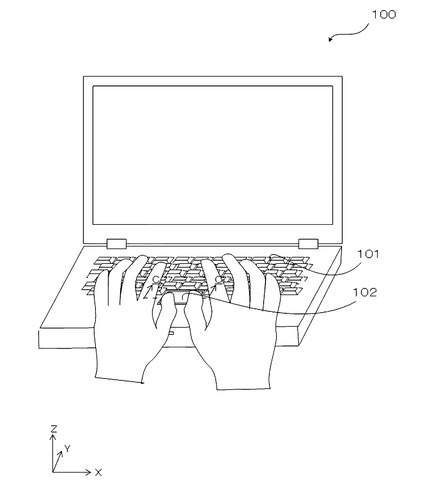
次に、第3の実施の形態に係る電子機器について、図面を参照しながら説明する。図15は、第3の実施の形態に係る電子機器の一例であるラップトップ型コンピュータ100の斜視図である。なお、第1の実施の形態に係る多方向操作部材4と同じ構成要素については、同じ番号を用いて説明する。
【0065】
(電子機器の構造)
図15に示すように、ラップトップ型コンピュータ100は、複数のキーから構成されるキーボード101および多方向操作部材102を備える。多方向操作部材102は、多方向に操作可能な部材であると共に、タッチパッドとしても機能する部材である。また、多方向操作部材102は、キーボード101に隣接して設けられている。図1では、キーボード101として、いわゆるQWERTY配列あるいはJIS配列等の文字入力用キーボードを図示しているが、キーボード101は、このような形態に限らず、どのような用途のキーボード101であってもよい。また、本明細書において、「キーボード101に隣接」とは、キーボード101に一部または全部が囲まれる場合、および、キーボード101と間隙を隔てて隣なり合う場合も含む。ラップトップ型コンピュータ100は、キーボード101および多方向操作部材102等から入力された情報を処理し、各部を制御する制御部(不図示)を内部に有する。
【0066】
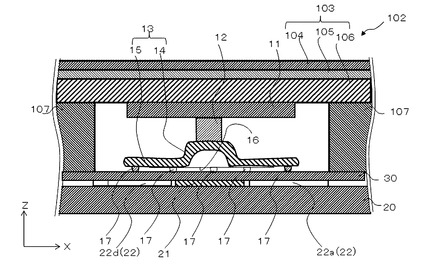
図16は、図15の多方向操作部材102を、C−C線で切断した場合の断面図である。図17は、図16の多方向操作部材102を、Dで示す領域について拡大して示す拡大断面図である。
【0067】
多方向操作部材102は、操作面側にタッチパッド103を備える。タッチパッド103は、長辺3〜10cm、短辺2〜7cmの長方形の操作面を有する板状の部材である。タッチパッド103としては、ユーザーの指あるいは物体がタッチパッド103に触れた際に、その触れた位置を検出できるものであればどのようなものでも採用できる。たとえば、静電容量式、抵抗膜式、赤外線式等のタッチパッドを用いることができる。その中でも、指で操作するのに適した静電容量式のタッチパッド103を用いるのが好ましい。静電容量式のタッチパッド103は、ユーザーの指あるいは導体がタッチパッド103に触れた際に生じる静電容量の変化によって、指あるいは導体の位置を検出できる。タッチパッド103は、操作面側から順に、保護層104、導電膜層105および補強層106を積層して成る。
【0068】
保護層104は、タッチパッド103の保護、外観向上およびタッチパッド103の表面の摩擦係数の制御のために設けられる層である。また、保護層104は、導電膜層105と指(電極とみなされる)との間の誘電層としても機能する。保護層104としては、たとえば、熱可塑性のシリコーン樹脂層を用いることができる。
【0069】
導電膜層105は、電極として機能する。導電膜層105の四隅には、検出部(不図示)が設けられ、各検出部(不図示)から同時にごく微弱な電流を流し続けている。導電膜層105を流れる電流は、人の指等の導電体がタッチパッド103に触れると、静電容量が変化することにより、変化する。その電流の変化量は、各検出部(不図示)から触れた点までの距離に反比例する。したがって、制御部(不図示)は、各検出部(不図示)にて検出された電流値から、指等の導電体が触れた位置の座標を求めることができる。
【0070】
補強層106は、タッチパッド103を補強するための層である。たとえば、補強層106は、ポリカーボネート樹脂、アクリル樹脂、アクリロニトリル・ブタジエン・スチレン樹脂、あるいは、ポリエチレンテレフタレート樹脂等の樹脂から構成される。また、補強層106は、操作面から視認されるタッチパッド103の色味を調節するために設けられることもある。
【0071】
タッチパッド103の操作面略中央の裏面側には、操作部10が固着されている。また、操作部10の裏面側には、シート部材30を介して基板20が配置されている。さらに、タッチパッド103の裏面側とシート部材30との間であって、操作部10が設けられていない部分には、緩衝層107が配置されている。
【0072】
緩衝層107は、タッチパッド103を操作した際の衝撃を緩衝する層である。緩衝層107は、弾性に富み、伸縮自在な部材から構成されるのが好ましく、たとえば、主にシリコーンからなるスポンジから構成される。また、緩衝層107は、操作面から見て略中央に、穴部108を有する。緩衝層107は、タッチパッド103を支持すると共に、タッチパッド103が押圧されると圧縮する部材である。また、緩衝層107は、タッチパッド103を東西南北に移動した場合に、タッチパッド103と連動できるようにタッチパッド103側に固着される。
【0073】
上述のような多方向操作部材102では、ユーザーは、状況に応じて、タッチパッド103を用いて軽く触れるだけで多方向に操作したい場合と、タッチパッド103を物理的に動かすことで多方向に操作したい場合と、の両方の場合に用いることができる。また、軽く触れるだけで多方向に操作できる入力装置と、物理的に動かすことで多方向に操作できる入力装置とを併せ持つ場合よりも電子機器を小型化できる。第1の実施の形態に係る多方向操作部材4と同様の原理により、操作方向を特定可能であると共に、操作した先でのクリック操作を検出することができる。また、ユーザーは、クリックしながら多方向への操作を行うことができる。さらに、ドーム部14の座屈により、ユーザーは、クリック感を得ることができる。
【0074】
また、上述のような多方向操作部材102を用いると、ユーザーは、タッチパッド103上の触れた位置に応じた多方向操作と、タッチパッド103自体の水平移動量に応じた多方向操作とを使い分けできる。たとえば、ユーザーは、ホームポジションから手の位置を移動させてタッチパッド103上に指を触れることにより、多方向操作部材102をタッチパッドとして使用できる。ここで、多方向操作部材102をタッチパッドとして使用する際には、ユーザーは、キーボードを操作する手の置き位置(いわゆるホームポジション)から、タッチパッド103を触れるために手の位置を変える必要がある。一方、ユーザーは、タッチパッド103を操作面に水平移動させることにより、多方向操作部材3を用いてホームポジションから手の位置を移動させずに多方向の操作を行うことができる。
【0075】
以上、本発明の多方向操作部材4,50,102およびそれを用いた電子機器としてのリモートコントローラ1およびラップトップ型コンピュータ100の実施の形態について説明したが、本発明は、上述の実施の形態に限定されることなく、種々変形を施して実施可能である。
【0076】
たとえば、上述の各実施の形態において、具体的な寸法および形状等を明示したが、このような数値に限定されない。たとえば、操作板11は、外周円の直径が10〜30mmで厚さが約1mmの円板状の部材としたが、このような形態に限らない。しかし、外周円の直径が10〜30mmの操作板11とすることで、手のひらで電子機器を把持し、親指で操作板11を操作しやすい電子機器となる。また、多方向操作部材102は、操作板11を有さずに、押圧子12がタッチパッド103に固着するような形態であってもよい。
【0077】
たとえば、上述の実施の形態では、電子機器としてリモートコントローラ1およびラップトップ型コンピュータ100を例示したが、電子機器は、リモートコントローラ1およびラップトップ型コンピュータ100以外の機器、例えば、モバイルコンピュータ、音楽再生用端末、携帯テレビあるいは車載用オーディオ機器等であっても良い。また、多方向操作部材102は、キーボード101を有していない電子機器に設けられても良い。しかし、多方向操作部材102は、キーボード101を有する電子機器に設けられるのがより好ましい。なぜなら、多方向操作部材102は、キーボード101に隣接する位置に設けられるため、ホームポジションから手を移動させずに多方向操作を可能とするからである。特に、キーボード101のホームポジションに手を置いた際に、親指の先から5cm以内の位置に多方向操作部材102を配置した場合には、ホームポジションから手を移動することなく親指を使ってタッチパッド103を操作できる。たとえば、タッチパッド103を容易に移動させるために、タッチパッド103の操作面に凹凸を形成してもよい。また、タッチパッド103の外周部分に滑り止めの縁を設けてもよい。
【0078】
また、上述の各実施の形態においては、円盤状の操作板11および長方形状のタッチパッド103を用いるものとしたが、そのような形態に限らない。たとえば、操作板11およびタッチパッド103は、それぞれ、操作面から見て正方形、円形状あるいは環形状としてもよいし、3角形、あるいは4角形以上の多角形であってもよい。ここで、操作板11が円板状の場合には、操作板11をXY平面上のどの方向、すなわち、360度どの方向にも移動できる。また、操作板11あるいはタッチパッド103のうち、操作面側に露出する方の操作面は、平面ではなく、凹凸形状を有する等、立体的であってもよい。たとえば、操作板11の外周部分を、ユーザーが指触で感じることができるように、操作板11の外周部分の厚さを外周以外の部分よりも厚くする、いわゆる円輪状の縁を形成してもよい。
【0079】
上述の多方向操作部材102は、緩衝層107を有するものとしたが、緩衝層107は、必須ではない。しかし、多方向操作部材102が緩衝層107を備えることにより、タッチパッド103あるいは操作板11の押し込みで、クリック動作が可能となる。また、タッチパッド103の水平方向へ安定して移動できる。
【0080】
第1の実施の形態では、導電部材13は、突出部17を有しているが、このような形態に限らない。導電部材13は、第2の実施の形態に示すように、シート部材30と接していてもよい。しかし、導電部材13が、突出部17を介してシート部材30と接するような形態とすることで、操作部10を平行移動しやすいものとなる。操作部10とシート部材30とは接触する面積が小さいため、基板20に平行移動する際に摩擦が小さくなるからである。また、突出部17は、半球状に限らず、平板状あるいは導電部材13の裏面全面に設けられる層等であってもよい。
【0081】
第1の実施の形態では、シート部材30は、基板20の表面の全てを覆うものとしているが、このような形態に限らない。シート部材30は、中心センサ部21および各外周センサ部22を少なくとも覆うことが好ましい。しかし、中心センサ部21および各外周センサ部22と導電部材13とが接しないように間隙を常に維持できれば、シート部材30がなくてもよい。シート部材30がない場合には、中心センサ部21および外周センサ部22と操作部10との間の空気層が絶縁層となる。また、シート部材30,70は、1種類以上の物質から構成されても良いし、2種類以上の層から形成されていても良い。さらに、シート部材30,70の代わりに、層状以外の部材が設けられてもよく、たとえば、1以上の突起を設けるようにしてもよい。しかし、表面に凹凸のない層状のシート部材30,70が基板20の表側全面を覆う場合には、導電部材13が基板20に対して平行移動する際に、滑らかに移動できるため、より好ましい。また、シート部材30,70としてシート状の部材を配置するのではなく、基板20の中心センサ部21および各外周センサ部22が設けられている側の面に、コート剤を塗布することでシート部材30,70が形成されてもよい。
【0082】
上述の各実施の形態においては、外周センサ部22は、円周に沿って4箇所設けるような形態としたが、このような形態に限らない。外周センサ部22は、3箇所以下であってもよいし、外周センサ部22は、円周に沿って設けられていなくてもよい。図18および図19は、本実施の形態の変形例における基板20を表面側から見た平面図である。多方向操作部材4が、所定の一方向への移動のみを検出したい場合には、外周センサ部22は、一方向にのみ設けられるようにしてもよい。たとえば、図18のように中心センサ部21のX方向側に1つの外周センサ部22を設けることで、X方向への移動および移動先でのクリックを検出するための多方向操作部材となる。また、図19に示すように、中心センサ部21の周囲に3箇所の外周センサ部22を設けても良い。
【0083】
図20は、本実施の形態の別の変形例における基板20を表面側から見た平面図である。外周センサ部22は、5箇所以上設けられてもよく、たとえば、図20に示すように6箇所設けられてもよい。外周センサ部22の数が多くなると、移動方向をより正確に認識できる。
【0084】
上述の実施の形態では、制御部40は、各外周センサ部22で検出された静電容量をスカラー量としたベクトルを生成し、それらのベクトル合成により、操作方向および操作量を特定できる。しかし、このような形態に限らず、制御部40は、操作方向のみを特定してもよいし、操作方向と操作量の両方を特定しても良い。
【0085】
また、制御部40は、以下のような方法で操作方向を判断しても良い。まず、制御部40は、C1,C2,C3,C4のうち静電容量が最大であった外周センサ部22を特定する。そして、制御部40は、最大の静電容量を検出した外周センサ部22の方向へ操作されたと認識する。たとえば、制御部40は、C1が最大であった場合には、X方向とY方向との合成方向に操作されたと判断し、C2が最大であった場合には、X方向と−Y方向との合成方向に操作されたと判断し、C3が最大であった場合には、−Y方向と−X方向との合成方向に操作されたと判断し、C4が最大であった場合には、−X方向とY方向との合成方向に操作されたと判断する。かかる方法で判断される場合には、制御部40は、所定の操作方向(外周センサ22が設けられた方向)のうち、どの方向へ操作されたかを特定できる。
【0086】
図21は、各実施の形態の変形例において、記憶部41が有する制御用テーブルの一例である。予め図21に示す制御用テーブルを記憶部41に格納し、制御部40が当該制御用のテーブルを参照して操作方向および操作量を特定するようにしてもよい。このテーブルは、たとえば、様々な方向に操作板11を移動させて、移動した位置を「座標位置(X,Y)」欄に、各位置で測定されたC1,C2,C3,C4の実測値をそれぞれ「測定値C1」、「測定値C2」、「測定値C3」および「測定値C4」の欄に入力することで作成される。図21に示すテーブルを制御部40が用いる場合には、制御部40は、検出されたC1,C2,C3,C4の各数値と「測定値C1」、「測定値C2」、「測定値C3」および「測定値C4」の各数値とが最も近い行を抽出し、その行に記載された座標位置(X,Y)を、操作板11の中心が移動した先の位置であると判断できる。
【産業上の利用可能性】
【0087】
本発明は、たとえば、各種電子機器の入力装置等に利用することができる。
【符号の説明】
【0088】
1 リモートコントローラ(電子機器)
4,50,102 多方向操作部材
10,52 操作部
11,54 操作板
14 ドーム部
15 延出部
16 開口部
17 突出部
18 伸縮部材
20,80 基板
21 中心センサ部(センサ部、中心センサ部)
22,22a,22b,22c,22d 外周センサ部(センサ部、外周センサ部)
40 制御部
100 ラップトップ型コンピュータ(電子機器)
101 キーボード
103 タッチパッド(入力部材)
【技術分野】
【0001】
本発明は、複数の方向に操作可能な多方向操作部材およびそれを備える電子機器に関する。
【背景技術】
【0002】
従来から、車載用機器、パーソナルコンピュータ、リモートコントローラおよび音響機器等の電子機器において、多方向に操作可能な入力装置が用いられている(たとえば、特許文献1を参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008−153233号公報(特許請求の範囲等)
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の入力装置では、所望の方向へ操作することができると共に、操作面に対して操作キーの略中央部分で、クリック感を伴う押圧動作ができる。しかし、特許文献1に記載の入力装置では、押圧動作を行うために一旦操作キーを中央部分に戻す必要があるので、キーを移動した先では、クリック動作を行うことができないという問題がある。
【0005】
本発明は、かかる問題を解消すべくなされたものであって、多方向への操作が可能であると共に、キーを移動した先でもクリック動作が可能な多方向操作部材およびそれを備える電子機器を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の多方向操作部材の一実施の形態は、導電部材の近接により静電容量を変化させる導電性のセンサ部を有する基板と、基板の面に対して略水平に移動可能である操作部と、を有し、操作部は、基板側に開口部を対向させるドーム部と、開口部の外周縁から外側へ延出する延出部とを有すると共に、センサ部と非接触状態の導電部材を備え、センサ部は、ドーム部の頂点と押圧方向で重なる位置に設けられた中心センサ部と、中心センサ部の外側に設けられる1以上の外周センサ部と、を有している。
【0007】
また、操作部は、基板の面に対して略水平に移動させると定位置に付勢する伸縮部材により支持され得る。
【0008】
また、延出部の基板側の面には、基板側に突出する突出部が設けられ得る。
【0009】
また、外周センサ部は、中心センサ部の中心を基準として周方向に略90度の角度を成して4箇所に配置され得る。
【0010】
また、操作面に略水平に移動可能であると共に、ユーザーが指で触れた位置を少なくとも検出可能な入力部材が操作部の表面側に固着され得る。
【0011】
また、本発明の電子機器の実施の形態は、導電部材の近接により静電容量を変化させる導電性のセンサ部を有する基板と、基板の面に対して略水平に移動可能である操作部と、を有し、操作部は、基板側に開口部を対向させるドーム部と、開口部の外周縁から外側へ延出する延出部とを有すると共に、センサ部と非接触状態の導電部材を備え、センサ部は、ドーム部の頂点に押圧方向で重なる位置に設けられた中心センサ部および中心センサ部の外側に設けられる1以上の外周センサ部を備える多方向操作部材と、導電性のセンサ部における静電容量を検出すると共に、静電容量に応じてドーム部の押込みの有無および操作部の位置を特定する制御する制御部とを有している。
【0012】
さらに、外周センサ部は、中心センサ部の中心を基準として周方向に略90度の角度を成すように4箇所に配置され、制御部は、それら4枚の外周センサ部においてそれぞれ検出された静電容量と外周センサ部の配置方向とに基づいて、操作板の移動方向あるいは移動量を特定し得る。
【0013】
さらに、操作面に略水平に移動可能であると共に、ユーザーが指で触れた位置を少なくとも検出可能な入力部材が操作部の表面側に固着され得る。
【0014】
さらに、多方向操作部材は、キーボードに隣接して設けられ得る。
【発明の効果】
【0015】
本発明によれば、多方向への操作が可能であると共に、キーを移動した先でもクリック動作が可能な多方向操作部材およびそれを備える電子機器を提供できる。
【図面の簡単な説明】
【0016】
【図1】本発明の第1の実施の形態に係る多方向操作部材を備える電子機器の斜視図である。
【図2】本発明の第1の実施の形態に係る多方向操作部材を構成する操作部の斜視図である。
【図3】本発明の第1の実施の形態に係る多方向操作部材を構成する基板およびシート部材の分解斜視図である。
【図4】本発明の第1の実施の形態に係る多方向操作部材を、図1のA−A線で切断した場合の断面図である。
【図5】図4に示す多方向操作部材が有する基板を操作面側から見た場合であって、導電部材の位置との関係を示す平面図である。
【図6】本発明の第1の実施の形態に係る電子機器としてのリモートコントローラの模式的な構成を示すブロック図である。
【図7】図4に示す多方向操作部材の操作板が押圧された状態を示す図であって、図4と同様の断面図である。
【図8】図7に示す多方向操作部材の基板を操作面側から見た平面図である。
【図9】図4に示す多方向操作部材の操作板をX方向にスライドした状態を示す図であって、図4と同様の断面図である。
【図10】図9で示す多方向操作部材の基板を操作面側から見た平面図である。
【図11】図4に示す多方向操作部材の操作板をX方向とY方向の中間方向に移動させた状態で、基板を操作面側から見た平面図である。
【図12】本発明の第2の実施の形態に係る多方向操作部材の斜視図である。
【図13】図12に示す多方向操作部材の分解斜視図である。
【図14】本発明の第2の実施の形態に係る多方向操作部材を、図12のB−B線で切断した場合の断面図である。
【図15】本発明の第3の実施の形態に係る多方向操作部材を備える電子機器の斜視図である。
【図16】本発明の第3の実施の形態に係る多方向操作部材を、図15のC−C線で切断した場合の断面図である。
【図17】図16に示す多方向操作部材を、Dで示す領域について拡大して示す拡大断面図である。
【図18】本実施の形態の変形例における基板を表面側から見た平面図である。
【図19】図18に示す変形例と異なる変形例における基板を表面側から見た平面図である。
【図20】図18および図19に示す各変形例と異なる変形例における基板を表面側から見た平面図である。
【図21】本実施の形態の変形例に係る多方向操作部材の記憶部が有する制御用テーブルの一例である。
【発明を実施するための形態】
【0017】
次に、本発明の各実施の形態に係る多方向操作部材およびそれを備える電子機器について、図面を参照しながら説明する。以下の各実施の形態では、電子機器としてテレビ用のリモートコントローラを例に説明するが、電子機器は、リモートコントローラ以外の機器、例えば、モバイルコンピュータ、音楽再生用端末、携帯テレビ、車載用オーディオ機器あるいは携帯電話等であっても良い。
【0018】
1.第1の実施の形態
(多方向操作部材の構造)
図1は、第1の実施の形態に係る電子機器の一例であるリモートコントローラ1の斜視図である。図1に示すように、リモートコントローラ1は、本発明の第1の実施の形態に係る多方向操作部材4を備える。以後、操作面側(図1の紙面手前側)を表面側、操作面と逆の面側(図1の紙面奥側)を裏面側という。また、各図において、図1の紙面右方向をX方向、紙面上方向をY方向として説明する。また、各図において、操作面に対して垂直に裏から表へ向かう方向をZ方向として説明する。
【0019】
図1に示すように、リモートコントローラ1は、略長方形状の筺体2に覆われている。また、図1では、リモートコントローラ1の操作面は、XY平面に平行な面である。リモートコントローラ1の操作面には、円形の穴部3が設けられ、その穴部3から、多方向操作部材4の操作板11が露出している。
【0020】
図2は、多方向操作部材4を構成する操作部10の斜視図である。図3は、多方向操作部材4を構成する基板20およびシート部材30の分解斜視図である。図4は、図1のA−A線に沿って操作面に対して垂直な面で多方向操作部材4を切断した場合の断面図である。なお、以後の各断面図では、見易さを考慮して各部材の厚さの比率を実際の比率と変えて図示している。
【0021】
多方向操作部材4は、操作部10、基板20および基板20の操作面側に設けられる絶縁層としてのシート部材30を主に有する。操作部10は、リモートコントローラ1の操作面側に露出する操作板11、操作板11の裏面側に設けられる押圧子12および押圧子12を介して操作板11に固着される導電部材13を主に有する。
【0022】
操作板11は、ユーザーが操作する部分であり、樹脂、金属、ガラス、セラミックスあるいはそれらの1種以上のコンポジット等から主に形成できる。操作板11としては、たとえば、外周円の直径が10〜30mmで厚さが約1mmの円板状の部材を用いることができる。操作板11は、何の操作も行われていない状態では、操作面から見て、筺体2に設けられた円形の穴部3の略中央に配置されている。ユーザーは、操作板11を基板20の表面に対して略水平にも操作できるし、基板20方向へ押圧操作を行うこともできる。なお、本明細書において、「略水平」とは、XY平面に平行な表面を有する基板20に対して、XY成分方向への移動を意味する。また、Z方向への操作板11の変位を伴いながら、XY成分方向への移動を行う場合にも、「略水平に移動」という語に含まれるものとする。操作板11の外周面と穴部3の内周面とは、非操作状態において、2〜7mm程度の間隙Dで離間している。本明細書では、操作面側から見た場合に、操作板11の外周円から見た中心を「中心P」という。
【0023】
押圧子12は、操作板11の中心から、基板20方向に突出する部分である。押圧子12は、操作板11と一体に形成されていてもよいし、別体として操作板11の裏面に接着あるいは融着等されていてもよい。また、押圧子12は、多方向操作部材4にとって必須の構成ではないが、押圧子12を有する操作板11とすることで、導電部材13に押圧力を伝えやすくなる。
【0024】
導電部材13は、ドーム部14および延出部15を主に有する。ドーム部14は、操作面側から所定の荷重以上で座屈するような逆椀状の部材である。ドーム部14の頂点部分は、押圧子12の端部に固着されている。延出部15は、ドーム部14の開口部16の外周縁からドーム部14の径方向外側に延出する部分である。
【0025】
導電部材13は、好ましくは、金属等の導電体により形成され、ドーム部14および延出部15が一体として形成されている。ただし、導電部材13は、その全部が導電性の材料から形成されている必要はない。たとえば、PET等の樹脂にてドーム部14および延出部15の形状を一体として形成し、ドーム部14および延出部15の表面もしくは裏面の一部または全部を導電性の材料、たとえば、金属等で覆ってもよい。さらに、樹脂製のドーム部14および延出部15の内部に、導電部材13を挟んでも良い。
【0026】
延出部15の基板20側の面は、基板20と略平行であると共に、基板20と離間している。延出部15の基板20側の面には、基板20の方向へ突出する8個の突出部17が設けられている。突出部17は、中心Pを基準に周方向に45度間隔で設けられている。操作部10は、突出部17をシート部材30に接触させた状態で立設する。突出部17は、同一の大きさの半球体であるため、基板20と延出部15の裏面との間隔を一定に維持することができる。また、操作部10を動かしたときに、操作部10は、シート部材30上をスムーズに移動可能である。
【0027】
押圧子12の側面には、蛇腹状の伸縮部材18が固着されている。伸縮部材18の操作板11側と逆側の端部は、リモートコントローラ1の筺体2に固着されている。伸縮部材18は、操作部10を穴部3内で動かしたときに、操作部10の動きに伴い伸縮する。伸縮部材18は、その伸縮に伴い、操作部10が穴部3のほぼ中心に位置する方向へ付勢する部材である。伸縮部材18は、操作板11の側面あるいは裏面に固着しても良い。操作部10は、伸縮部材18が伸縮することで基板20に対して水平移動できる。さらに、操作板11が表面側から裏面方向に押圧される(すなわち、クリックされる)ことにより、伸縮部材18は、基板20の方向に撓むこともできる。したがって、操作板11が押圧されると、操作板11は、押圧子12の下方に設けられたドーム部14を押し込み、ドーム部14を座屈させることができる。なお、本明細書において、「クリック」とは、押圧により操作用部材を押し下げる動作のことをいう。また、キーを押し下げていった場合に、ある地点でその押圧力に対する抵抗力が急に小さくなることで、ユーザーがクリックしたという感触を得られるが、その感触を「クリック感」という。
【0028】
伸縮部材18は、柔軟性に富む弾性体、たとえば、ウレタン樹脂、熱可塑性エラストマー、シリコーンゴム等の熱硬化性エラストマーあるいは天然ゴム等から成るシートから構成されるのが好ましい。それらの材料の中でも、熱可塑性エラストマーに含まれる耐久性に優れたウレタン系エラストマーから成る蛇腹状部材を用いるのが好ましい。なお、操作部10の平行移動あるいは操作板11のクリックによる上下移動に十分追随することができる程度に伸縮可能な部材から伸縮部材18が構成されている場合には、伸縮部材18は、蛇腹形状でなくてもよい。
【0029】
図5は、基板20を操作面側から見た平面図である。図5では、図4の状態の多方向操作部材4について、延出部15の外周縁を破線Qで示し、開口部16の外周縁を破線Rで示している。さらに、ドーム部14の頂点と対向する位置をPで示している。
【0030】
基板20には、センサ部として、円形の中心センサ部21および中心センサ部21を囲む外周センサ部22a、外周センサ部22b、外周センサ部22cおよび外周センサ部22d(総称する場合には、「外周センサ部22」と称する)が主に設けられている。基板20としては、たとえば、印刷回路基板を用いることができる。
【0031】
中心センサ部21は、操作面から見て円形である。また、中心センサ部21の半径は、操作板11の外周と穴部3の内壁との間隙Dよりも大きい。したがって、操作板11が穴部3の内壁に接するまで移動した場合であっても、操作板11の中心Pは、中心センサ部21とZ方向で重なる。また、中心センサ部21の半径は、ドーム部14の外周縁の半径に間隙Dを加えた距離と同一若しくはそれよりも大きいのがより好ましい。かかる場合には、操作部10の移動により、ドーム部14が、外周センサ部22とZ方向で重なることがない。外周センサ部22にドーム部14が重ならないので、外周センサ部22で検出される静電容量値は、外周センサ部22に対向する延出部15のZ方向への投影面積のみにより増減する。
【0032】
外周センサ部22は、環状のセンサ部を4つに分割した弧状のセンサ部である。外周センサ部22は、中心センサ部21の中心を基準にY方向から周方向に略90度で分割され、時計回りで、外周センサ部22a、外周センサ部22b、外周センサ部22cおよび外周センサ部22dの4つに分割されている。なお、本明細書において、「略90度」とは、90度を中心として、誤差とみなせる範囲を含み、具体的には、85度から95度程度であればよい。中心センサ部21の中心を基準にY方向から周方向に略90度で外周センサ部22が分割されている場合には、操作板11をXY平面に略水平などの方向へ移動させた場合にも、その操作方向を特定するのが容易になる。外周センサ部22a、外周センサ部22b、外周センサ部22cおよび外周センサ部22dは、操作面から見て、それぞれ同程度の面積を有している。外周センサ部22の外周の半径は、好ましくは、間隙Dに延出部15の外周の半径を加えた距離と同一若しくはそれより大きい。かかる場合には、操作板11が穴部3の内壁に接するまで移動した場合であっても、延出部15の外周が、外周センサ部22の外周よりも外側に飛び出すことがない。外周センサ部22の外周よりも導電部材13が飛び出さないので、外周センサ部22で検出される静電容量値は、延出部15の移動量(すなわち、延出部15の外周が中心センサ部21の中心からの離間距離)が大きくなる程、増加する。
【0033】
たとえば、中心センサ部21および外周センサ部22の領域には、基板20の上に金属薄膜等で電導膜(不図示)が積層されている。電導膜には、電極(不図示)が電気的に接続されている。電極は、電導膜に所定の電圧を印加すると共に、電導膜とグランドとの間の静電容量Cdの変化を検出する回路に接続されている。
【0034】
シート部材30は、絶縁性の部材から構成されるシートである。シート部材30は、基板20と操作部10との間に存在していれば、基板20の表面に設けられてもよいし、あるいは、操作部10の裏面側に設けられても良い。また、本明細書において「絶縁性」あるいは「絶縁」とは、実質的に直流電流を通さない性質を指し、たとえば、電気抵抗値が102Ω・m以上の性質をいう。さらに、シート部材30としては、高い誘電率を有する部材を好適に用いることができる。シート部材30は、中心センサ部21および外周センサ部22と、導電部材13とが電気的に導通しないように設けられる。また、シート部材30は、導電部材13と、中心センサ部21および外周センサ部22の電導膜との間の誘電体としての役割を有する。シート部材30は、好ましくは、耐摩耗性に優れ、摩擦係数が比較的低い部材により構成される。たとえば、厚さ0.1mmのテトラフルオロエチレン製のシートをシート部材30として用いることができる。フッ素樹脂等を主に含むシート部材30とすることで、導電部材13がより滑らかにシート部材30の上を移動できると共に、ドーム部14に設けられた突出部17が摩耗しにくくなる。
【0035】
中心センサ部21および外周センサ部22が設けられた領域に、導電部材13がZ方向で重なると、中心センサ部21および外周センサ部22上の電導膜(不図示)と導電部材13とが、コンデンサとして機能する。当該コンデンサの静電容量Cdは、Cd=εA/d(ε;2電極間の誘電率、A;2電極間の対向面積、d;2電極間の間隙の距離)にて表わされる。したがって、中心センサ部21あるいは外周センサ部22に対向する導電部材13の面積の増減(上述の式“A”の変化)、あるいは、ドーム部14と中心センサ部21との対向距離の増減(上述の式“d”の変化)により、静電容量Cdが変化する。たとえば、中心センサ部21あるいは外周センサ部22と導電部材13との距離が小さくなることで、静電容量Cdが増加する。また、中心センサ21あるいは外周センサ部22と対向する導電部材13の面積が大きくなると、静電容量Cdが増加する。
【0036】
上述のような多方向操作部材4とすることで、操作部10が平行移動できると共に、その平行移動した先で操作板11を押し込むことができる。また、ユーザーが、操作板11をクリックした際には、ドーム部14が座屈することで、ユーザーは、クリック感を得ることができる。さらに、上述のような多方向操作部材4では、操作板11を押し下げた状態のまま操作板11を所望の方向へ移動させることができる。
【0037】
(電子機器の構造)
図6は、本発明の第1の実施の形態に係る電子機器としてのリモートコントローラ1の模式的な構成を示すブロック図である。
【0038】
リモートコントローラ1は、多方向操作部材4からの入力に従いリモートコントローラ1を制御する制御部40を有する。制御部40は、記憶部41、CPU(Central Processing Unit)42、検出部43等を有する。記憶部41としては、たとえば、RAM(Random Access Memory)、ROM(Read Only Memory)あるいはハードディスクドライブなどの記録媒体で構成され、制御プログラム、検出された静電容量Cに基づき判断処理するための数式あるいはテーブル等を記憶する。制御部40は、たとえば、CPU42が記憶部41に記憶された図示外の制御プログラムを、実行することで種々の処理を行うことができる。この制御プログラムは、リモートコントローラ1の出荷前にRAM等に記憶されたものであっても、リモートコントローラ1の出荷後に記憶されたものであってもよい。
【0039】
制御部40は、中心センサ部21および外周センサ部22の静電容量あるいは静電容量の変化に応じてリモートコントローラ1からの各種の信号を出力することができる。制御部40は、多方向操作部材4の内部に設けられていてもよいし、多方向操作部材4の外部であって、リモートコントローラ1の内部に設けられていてもよい。さらに、リモートコントローラ1の外部に、制御部40が設けられていてもよい。
【0040】
制御部40は、中心センサ部21および外周センサ部22に電圧を印加し(電圧を印加するための電源は不図示)、それらの静電容量Cを検出する検出部43を有する。また、制御部40は、検出部43から得られた静電容量Cの値に基づきドーム部14の押込の有無および操作部10の位置を特定する判断部として機能する。以後、外周センサ部22aにおける静電容量をC1、外周センサ部22bにおける静電容量をC2、外周センサ部22cにおける静電容量をC3、外周センサ部22dにおける静電容量をC4、中心センサ部21における静電容量をC5とする。制御部40は、たとえば、外周センサ部22aで検出された静電容量C1を、C1のスカラー量を有するX方向とY方向との合成方向成分を有するベクトルb1、外周センサ部22bで検出された静電容量C2をC2のスカラー量を有するX方向と−Y方向との合成方向成分を有するベクトルb2、外周センサ部22cで検出された静電容量C3をC3のスカラー量を有する−Y方向と−X方向との合成方向成分を有するベクトルb3、外周センサ部22dで検出された静電容量C4を、−X方向とY方向との合成方向成分を有するベクトルb4に置き換えて、それらの各ベクトルb1,b2,b3,b4をベクトル合成し、得られた合成ベクトルにより操作方向および操作量を特定することができる。
【0041】
次に、多方向操作部材4の動作および制御部40の処理について説明する。
【0042】
(多方向操作部材の動作および制御部の動作)
図7は、図4に示す多方向操作部材4の操作板11が押圧された状態を示す図であって、図4と同様の断面図である。また、図8は、図7に示す多方向操作部材4の基板20を操作面側から見た平面図である。図8では、延出部15の外周縁が対向する位置を破線Qで示し、延出部15と対向する領域を網掛けにて示している。また、延出部15と外周センサ部22aとの対向領域をQa、延出部15と外周センサ部22bとの対向領域をQb、延出部15と外周センサ部22cとの対向領域をQc、および延出部15と外周センサ部22dとの対向領域をQdとして図示している。また、ドーム部14の頂上と対向する位置をPで示し、ドーム部14の開口部16の外周縁が対向する位置を一点鎖線Rで示している。
【0043】
図7に示すように、操作板11を基板20方向に押圧すると、ドーム部14が座屈する。ドーム部14の座屈により、図8のRで囲まれる領域にて、ドーム部14と中心センサ部21との距離が小さくなり、中心センサ部21における静電容量C5が増加する。制御部40は、中心センサ部21における静電容量C5が所定の閾値を超えたことを検出すると、制御部40は、多方向操作部材4がクリックされたと認識できる。逆に、ユーザーが操作板11の押圧を止めると、ドーム部14が元の形に戻るため、Rで示される部分と中心センサ部21との距離dが大きくなるので、静電容量C5が減少する。静電容量C5が所定の閾値を下回っているときには、制御部40は、操作板11は、押圧されていないと認識できる。
【0044】
また、制御部40は、各外周センサ部22における静電容量C1,C2,C3,C4を同時あるいは略同時に検出する。図8に示すように、ドーム部14の頂点Pが中心センサ部21の中心と略同一の場合には、Qa,Qb,Qc,Qdは、すべて同程度の面積を有する(すなわち、Qa=Qb=Qc=Qd)。したがって、各外周センサ部22における静電容量は、略同等(すなわち、C1=C2=C3=C4)となる。制御部40は、これらの静電容量に応じてベクトルb1,b2,b3,b4を生成する。C1=C2=C3=C4の場合には、これらのベクトルb1,b2,b3,b4をベクトル合成すると、各ベクトルが打ち消しあって0になる。したがって、制御部40は、操作板11の中心Pが動いていない、すなわち、操作板11の中心Pが中心センサ部21の中心とほぼ重なる位置にあると判断する。
【0045】
図9は、図4に示す多方向操作部材4の操作板11をX方向にスライドした状態を示す図であって、図4と同様の断面図である。図10は、図9に示す多方向操作部材4の基板20を操作面側から見た場合の平面図である。図10では、延出部15の外周縁が対向する位置を破線Qで示し、延出部15と対向する領域を網掛けにて示している。また、延出部15と外周センサ部22aとの対向領域をQa、延出部15と外周センサ部22bとの対向領域をQb、延出部15と外周センサ部22cとの対向領域をQc、および延出部15と外周センサ部22dとの対向領域をQdとして図示している。また、開口部16の外周縁と対向する位置を一点鎖線Rで示し、ドーム部14の頂点と対向する位置をP’で示している。
【0046】
図10に示すように、操作板11をX方向に移動させた場合には、QaとQbとは、同程度の面積である(すなわち、Qa=Qb)。一方、QcとQdとが同程度の面積である(すなわち、Qa=Qb)。また、QaあるいはQbは、QcおよびQdよりも面積が大きい。上述のように、図9および図10に示す状態では、(Qa=Qb)>(Qc=Qd)という関係が成立するので、各外周センサ部22にて検出される静電容量値は、(C1=C2)>(C3=C4)という関係が成り立つ。
【0047】
制御部40は、これらの静電容量に応じてベクトルb1,b2,b3,b4を生成し、これらをベクトル合成すると、(C1=C2)>(C3=C4)の場合には、合成ベクトルは、X方向成分のみのベクトルとなる。したがって、制御部40は、操作板11の中心Pは、X方向に移動されたと判断できる。
【0048】
図11は、図4に示す多方向操作部材4の操作板11をX方向とY方向との中間の方向(図11の紙面では右斜め上方向)に移動させた状態で、基板20を操作面側から見た平面図である。図11では、延出部15の外周縁が対向する位置を破線Qで示し、延出部15と対向する領域を網掛けにて示している。また、延出部15と外周センサ部22aとの対向領域をQa、延出部15と外周センサ部22bとの対向領域をQb、延出部15と外周センサ部22cとの対向領域をQc、および、延出部15と外周センサ部22dとの対向領域をQdとして図示している。また、ドーム部14と対向する領域を一点鎖線Rにて囲み、ドーム部14の頂上と対向する位置をP’’で示している。
【0049】
図11に示すように、X方向とY方向との中間の方向に操作板11がスライドした状態では、図8の状態を基準とすると、Qa>(Qb=Qd)>Qcの関係になる。したがって、図11の状態では、制御部40が各外周センサ部22にて検出する静電容量値は、C1>(C2=C4)>C3の関係となる。
【0050】
制御部40は、これらの静電容量に応じてベクトルb1,b2,b3,b4を生成し、これらをベクトル合成すると、C1>(C2=C4)>C3の場合には、合成ベクトルは、X方向とY方向との中間の方向成分を有する。したがって、制御部40は、操作板11の中心Pは、X方向とY方向との中間の方向に移動されたと判断できる。
【0051】
また、操作板11が紙面右斜め上方向にスライドされた状態でも、ドーム部14は、中心センサ部21と対向している。操作板11がX方向とY方向との中間の方向にスライドされた状態であっても、操作板11の押圧/非押圧により、図11に示すRの領域において中心センサ部21と導電部材13との距離dが変動する。そのため、制御部40は、所定の静電容量値よりもC5が大きいあるいは小さいかにより、操作板11がクリックされた状態にあるか否かを認識できる。
【0052】
上述のような多方向操作部材4では、操作方向を特定可能であると共に、操作した先でのクリック操作を検出することができる。また、ユーザーは、クリックしながら多方向への操作を行うことができる。さらに、ドーム部14の座屈により、ユーザーは、クリック感を得ることができる。
【0053】
たとえば、リモートコントローラ1でテレビ等の表示部のポインタを操作するのに、多方向操作部材4を用いることができる。その場合に、多方向操作部材4によりある方向へ操作板11が操作されたことを制御部40が検出した場合には、制御部40は、画面上に表示されたポインタをその操作方向に移動させるよう制御してもよい。また、多方向操作部材4によりクリック動作がなされたことを制御部40が検出した場合には、クリックされた際にポインタが指し示す表示を選択するように制御部40が制御してもよい。さらに、多方向操作部材4により、クリックしながらある方向へ操作されていることを制御部40が検出した場合には、いわゆる「ドラッグ動作」(画面上アイコン等を仮想的に「つかむ」操作のこと。たとえば、画面上でポインタがアイコンなどに重なった状態で、クリックし、クリック状態を維持したままポインタを移動させること。)を行うように制御部40が制御してもよい。
【0054】
2.第2の実施の形態
(多方向操作部材の構造)
次に、第2の実施の形態に係る多方向操作部材50について、図面を参照しながら説明する。図12は、第2の実施の形態に係る多方向操作部材50の斜視図である。図13は、多方向操作部材50の分解斜視図である。図14は、多方向操作部材50を図12に示すB−B線で切断した場合の断面図である。第2の実施の形態に係る多方向操作部材50は、第1の実施の形態に係る多方向操作部材4とその構造が異なる。なお、第1の実施の形態に係る多方向操作部材4と同じ構成要素については、同じ番号を用いて説明する。
【0055】
多方向操作部材50は、表面側から、固定具51、操作部52、シート部材60、ドームシート70および基板80を主に有する。操作部52は、表面側から、第1の操作板53、第2の操作板54、キーパッド55、導電部材13を主に有する。
【0056】
固定具51は、リング状の部材であって、基板80の穴部に挿入できる突出部あるいは、固定具51と基板80とをねじ等で固定するためのねじ穴が設けられている。固定具51と基板80とがねじ等により固定されることで、その固定具51と基板80との間に、操作部52およびドームシート70の端部を固定できる。また、固定具51の内周部分は、裏面側が表面側に向かって凹んでいるので、第1の操作板53の外周部分が、その固定具51の内周部分の裏面側に入り込んでいる。
【0057】
操作部52を構成する第1の操作板53および第2の操作板54は、ユーザーが操作する部分であり、第1の実施の形態における操作板11と同様の材料から構成される。第1の操作板53は、環状の部材であり、第2の操作板54は、その内周面よりも小さい外周を有する円板状の部材である。第2の操作板54は、第1の操作板53の内側に配置される。第2の操作板54をXY平面上の様々な方向へ操作する際に、第1の操作板53を誤って押圧しないように、第1の操作板53の内周側は、その外周側よりも操作面から見て一段低く形成されている。一方、第2の操作板54の中心部分は、その外周側よりも表面側に突出している。
【0058】
操作部52を構成するキーパッド55は、第1の操作板53および第2の操作板54を支持する部材であり、伸縮部材として機能する。第1の操作板53および第2の操作板54は、キーパッド55の表面に接着剤、粘着剤あるいは融着等により固着されている。また、キーパッド55は、第1の操作板53および第2の操作板54が表面側から押圧された場合には、その下方に設けられた皿バネ部72および導電部材13等を押し込むことができるように、さらには、第2の操作板54が基板80の面に対して水平に移動した場合にもその移動に十分追随が可能であるように、伸縮可能な材料から構成されるのが好ましい。さらに好ましくは、キーパッド55は、第2の操作板54が基板80の面に対して水平移動した場合に、第2の操作板54を元の位置に付勢するような弾性部材から構成される。そのようなキーパッド55の材料としては、たとえば、シリコーンゴム、ウレタンゴム、イソプレンゴム、エチレンプロピレンゴム、天然ゴム、エチレンプロピレンジエンゴムあるいはスチレンブタジエンゴム等の熱硬化性エラストマー、ウレタン系、エステル系、スチレン系、オレフィン系、ブタジエン系あるいはフッ素系等の熱可塑性エラストマー、あるいはそれらの複合物等を用いることができる。それらの材料の中でも、耐久性が高いウレタン系エラストマー、シリコーンゴムあるいはそれらの複合物を用いるのが好ましい。
【0059】
キーパッド55は、第2の操作板54が基板80の面に対して水平に移動しやすいように、第2の操作板54が貼り付けられる部分の外周に折り曲げ部56が形成されていてもよい。また、折り曲げ部56は、一回以上折り曲げられることで、蛇腹形状が形成されていてもよい。折り曲げ部56が設けられている場合には、第2の操作板54が水平移動しやすい。さらに、折り曲げ部56が設けられている場合には、第2の操作板54の水平移動により、第1の操作板53が固着されている部分のキーパッド55が引っ張られにくいため、第1の操作板53とキーパッド55との固着部分が剥がれにくい。
【0060】
キーパッド55の裏面には、基板80方向へ突出する押圧子57が設けられている。押圧子57は、合計5個設けられている。押圧子57のうち1個は、第2の操作板54の外周円を基準とした中心Pと重なる位置に設けられている。残りの4個の押圧子57は、第1の操作板53に押圧方向で重なる位置であって、中心Pを基準とした同心円の周方向に沿うように90度間隔で1個ずつ設けられている。導電部材13は、第1の実施の形態における導電部材13と同様に、ドーム部14および延出部15が一体として形成されている導電性の部材である。また、導電部材13は、中心Pと重なる位置に設けられている押圧子57に、その頂点が固着されている。
【0061】
ドームシート70は、基板80の表面に沿う平坦部71と、平坦部71より突出して設けられた皿バネ部72とを有している。平坦部71のうち、基板80の第1接点部81および第2接点部82に対応する位置には、貫通孔が設けられている。皿バネ部72は、少なくとも裏面側が導電性の層により形成され、貫通孔を覆うように逆椀状に平坦部71に設けられている。多方向操作部材50が操作されていない状態においては、皿バネ部72の裏面は、第1接点部82と電気的に導通しているが、第2接点部81とは電気的に導通しないような状態で固定されている。この皿バネ部72は、押圧されて弾性変形することにより、皿バネ部72の頂点部内側が第2接点部81と接触して、第1接点部82と第2接点部81との間が導通する。一方、皿バネ部72の押圧が解除されると、皿バネ部72は、弾性により逆椀状に復元し、その頂点部内側が第2接点部81と離間する。
【0062】
基板80は、第1の実施の形態の基板20と同様に円形の中心センサ部21および中心センサ部21を囲む4つの外周センサ部22が設けられている。さらに、基板80の表面には、円形の第2接点部81および第2接点部81を囲むようにして設けられた第1接点部82が、4箇所設けられている。第2接点部81は、第1の操作板53に設けられた4つの押圧子57と押圧方向で重なる位置にそれぞれ設けられている。また、基板80の表面であって、基板80の外周センサ部22の外周円の内側と重なる領域には、シート部材70が配置されている。
【0063】
上述のような多方向操作部材50とすることで、第1の実施の形態に係る多方向操作部材4と同様に、操作部52が平行移動できると共に、その平行移動した先で第2の操作板54を押し込むことができる。また、ユーザーが、第2の操作板54をクリックした際には、ドーム部14が座屈することで、ユーザーは、クリック感を得ることができる。さらに、上述のような多方向操作部材50では、第2の操作板54を押し下げた状態のまま第2の操作板54を所望の方向へ移動させることができる。
【0064】
3.第3の実施の形態
次に、第3の実施の形態に係る電子機器について、図面を参照しながら説明する。図15は、第3の実施の形態に係る電子機器の一例であるラップトップ型コンピュータ100の斜視図である。なお、第1の実施の形態に係る多方向操作部材4と同じ構成要素については、同じ番号を用いて説明する。
【0065】
(電子機器の構造)
図15に示すように、ラップトップ型コンピュータ100は、複数のキーから構成されるキーボード101および多方向操作部材102を備える。多方向操作部材102は、多方向に操作可能な部材であると共に、タッチパッドとしても機能する部材である。また、多方向操作部材102は、キーボード101に隣接して設けられている。図1では、キーボード101として、いわゆるQWERTY配列あるいはJIS配列等の文字入力用キーボードを図示しているが、キーボード101は、このような形態に限らず、どのような用途のキーボード101であってもよい。また、本明細書において、「キーボード101に隣接」とは、キーボード101に一部または全部が囲まれる場合、および、キーボード101と間隙を隔てて隣なり合う場合も含む。ラップトップ型コンピュータ100は、キーボード101および多方向操作部材102等から入力された情報を処理し、各部を制御する制御部(不図示)を内部に有する。
【0066】
図16は、図15の多方向操作部材102を、C−C線で切断した場合の断面図である。図17は、図16の多方向操作部材102を、Dで示す領域について拡大して示す拡大断面図である。
【0067】
多方向操作部材102は、操作面側にタッチパッド103を備える。タッチパッド103は、長辺3〜10cm、短辺2〜7cmの長方形の操作面を有する板状の部材である。タッチパッド103としては、ユーザーの指あるいは物体がタッチパッド103に触れた際に、その触れた位置を検出できるものであればどのようなものでも採用できる。たとえば、静電容量式、抵抗膜式、赤外線式等のタッチパッドを用いることができる。その中でも、指で操作するのに適した静電容量式のタッチパッド103を用いるのが好ましい。静電容量式のタッチパッド103は、ユーザーの指あるいは導体がタッチパッド103に触れた際に生じる静電容量の変化によって、指あるいは導体の位置を検出できる。タッチパッド103は、操作面側から順に、保護層104、導電膜層105および補強層106を積層して成る。
【0068】
保護層104は、タッチパッド103の保護、外観向上およびタッチパッド103の表面の摩擦係数の制御のために設けられる層である。また、保護層104は、導電膜層105と指(電極とみなされる)との間の誘電層としても機能する。保護層104としては、たとえば、熱可塑性のシリコーン樹脂層を用いることができる。
【0069】
導電膜層105は、電極として機能する。導電膜層105の四隅には、検出部(不図示)が設けられ、各検出部(不図示)から同時にごく微弱な電流を流し続けている。導電膜層105を流れる電流は、人の指等の導電体がタッチパッド103に触れると、静電容量が変化することにより、変化する。その電流の変化量は、各検出部(不図示)から触れた点までの距離に反比例する。したがって、制御部(不図示)は、各検出部(不図示)にて検出された電流値から、指等の導電体が触れた位置の座標を求めることができる。
【0070】
補強層106は、タッチパッド103を補強するための層である。たとえば、補強層106は、ポリカーボネート樹脂、アクリル樹脂、アクリロニトリル・ブタジエン・スチレン樹脂、あるいは、ポリエチレンテレフタレート樹脂等の樹脂から構成される。また、補強層106は、操作面から視認されるタッチパッド103の色味を調節するために設けられることもある。
【0071】
タッチパッド103の操作面略中央の裏面側には、操作部10が固着されている。また、操作部10の裏面側には、シート部材30を介して基板20が配置されている。さらに、タッチパッド103の裏面側とシート部材30との間であって、操作部10が設けられていない部分には、緩衝層107が配置されている。
【0072】
緩衝層107は、タッチパッド103を操作した際の衝撃を緩衝する層である。緩衝層107は、弾性に富み、伸縮自在な部材から構成されるのが好ましく、たとえば、主にシリコーンからなるスポンジから構成される。また、緩衝層107は、操作面から見て略中央に、穴部108を有する。緩衝層107は、タッチパッド103を支持すると共に、タッチパッド103が押圧されると圧縮する部材である。また、緩衝層107は、タッチパッド103を東西南北に移動した場合に、タッチパッド103と連動できるようにタッチパッド103側に固着される。
【0073】
上述のような多方向操作部材102では、ユーザーは、状況に応じて、タッチパッド103を用いて軽く触れるだけで多方向に操作したい場合と、タッチパッド103を物理的に動かすことで多方向に操作したい場合と、の両方の場合に用いることができる。また、軽く触れるだけで多方向に操作できる入力装置と、物理的に動かすことで多方向に操作できる入力装置とを併せ持つ場合よりも電子機器を小型化できる。第1の実施の形態に係る多方向操作部材4と同様の原理により、操作方向を特定可能であると共に、操作した先でのクリック操作を検出することができる。また、ユーザーは、クリックしながら多方向への操作を行うことができる。さらに、ドーム部14の座屈により、ユーザーは、クリック感を得ることができる。
【0074】
また、上述のような多方向操作部材102を用いると、ユーザーは、タッチパッド103上の触れた位置に応じた多方向操作と、タッチパッド103自体の水平移動量に応じた多方向操作とを使い分けできる。たとえば、ユーザーは、ホームポジションから手の位置を移動させてタッチパッド103上に指を触れることにより、多方向操作部材102をタッチパッドとして使用できる。ここで、多方向操作部材102をタッチパッドとして使用する際には、ユーザーは、キーボードを操作する手の置き位置(いわゆるホームポジション)から、タッチパッド103を触れるために手の位置を変える必要がある。一方、ユーザーは、タッチパッド103を操作面に水平移動させることにより、多方向操作部材3を用いてホームポジションから手の位置を移動させずに多方向の操作を行うことができる。
【0075】
以上、本発明の多方向操作部材4,50,102およびそれを用いた電子機器としてのリモートコントローラ1およびラップトップ型コンピュータ100の実施の形態について説明したが、本発明は、上述の実施の形態に限定されることなく、種々変形を施して実施可能である。
【0076】
たとえば、上述の各実施の形態において、具体的な寸法および形状等を明示したが、このような数値に限定されない。たとえば、操作板11は、外周円の直径が10〜30mmで厚さが約1mmの円板状の部材としたが、このような形態に限らない。しかし、外周円の直径が10〜30mmの操作板11とすることで、手のひらで電子機器を把持し、親指で操作板11を操作しやすい電子機器となる。また、多方向操作部材102は、操作板11を有さずに、押圧子12がタッチパッド103に固着するような形態であってもよい。
【0077】
たとえば、上述の実施の形態では、電子機器としてリモートコントローラ1およびラップトップ型コンピュータ100を例示したが、電子機器は、リモートコントローラ1およびラップトップ型コンピュータ100以外の機器、例えば、モバイルコンピュータ、音楽再生用端末、携帯テレビあるいは車載用オーディオ機器等であっても良い。また、多方向操作部材102は、キーボード101を有していない電子機器に設けられても良い。しかし、多方向操作部材102は、キーボード101を有する電子機器に設けられるのがより好ましい。なぜなら、多方向操作部材102は、キーボード101に隣接する位置に設けられるため、ホームポジションから手を移動させずに多方向操作を可能とするからである。特に、キーボード101のホームポジションに手を置いた際に、親指の先から5cm以内の位置に多方向操作部材102を配置した場合には、ホームポジションから手を移動することなく親指を使ってタッチパッド103を操作できる。たとえば、タッチパッド103を容易に移動させるために、タッチパッド103の操作面に凹凸を形成してもよい。また、タッチパッド103の外周部分に滑り止めの縁を設けてもよい。
【0078】
また、上述の各実施の形態においては、円盤状の操作板11および長方形状のタッチパッド103を用いるものとしたが、そのような形態に限らない。たとえば、操作板11およびタッチパッド103は、それぞれ、操作面から見て正方形、円形状あるいは環形状としてもよいし、3角形、あるいは4角形以上の多角形であってもよい。ここで、操作板11が円板状の場合には、操作板11をXY平面上のどの方向、すなわち、360度どの方向にも移動できる。また、操作板11あるいはタッチパッド103のうち、操作面側に露出する方の操作面は、平面ではなく、凹凸形状を有する等、立体的であってもよい。たとえば、操作板11の外周部分を、ユーザーが指触で感じることができるように、操作板11の外周部分の厚さを外周以外の部分よりも厚くする、いわゆる円輪状の縁を形成してもよい。
【0079】
上述の多方向操作部材102は、緩衝層107を有するものとしたが、緩衝層107は、必須ではない。しかし、多方向操作部材102が緩衝層107を備えることにより、タッチパッド103あるいは操作板11の押し込みで、クリック動作が可能となる。また、タッチパッド103の水平方向へ安定して移動できる。
【0080】
第1の実施の形態では、導電部材13は、突出部17を有しているが、このような形態に限らない。導電部材13は、第2の実施の形態に示すように、シート部材30と接していてもよい。しかし、導電部材13が、突出部17を介してシート部材30と接するような形態とすることで、操作部10を平行移動しやすいものとなる。操作部10とシート部材30とは接触する面積が小さいため、基板20に平行移動する際に摩擦が小さくなるからである。また、突出部17は、半球状に限らず、平板状あるいは導電部材13の裏面全面に設けられる層等であってもよい。
【0081】
第1の実施の形態では、シート部材30は、基板20の表面の全てを覆うものとしているが、このような形態に限らない。シート部材30は、中心センサ部21および各外周センサ部22を少なくとも覆うことが好ましい。しかし、中心センサ部21および各外周センサ部22と導電部材13とが接しないように間隙を常に維持できれば、シート部材30がなくてもよい。シート部材30がない場合には、中心センサ部21および外周センサ部22と操作部10との間の空気層が絶縁層となる。また、シート部材30,70は、1種類以上の物質から構成されても良いし、2種類以上の層から形成されていても良い。さらに、シート部材30,70の代わりに、層状以外の部材が設けられてもよく、たとえば、1以上の突起を設けるようにしてもよい。しかし、表面に凹凸のない層状のシート部材30,70が基板20の表側全面を覆う場合には、導電部材13が基板20に対して平行移動する際に、滑らかに移動できるため、より好ましい。また、シート部材30,70としてシート状の部材を配置するのではなく、基板20の中心センサ部21および各外周センサ部22が設けられている側の面に、コート剤を塗布することでシート部材30,70が形成されてもよい。
【0082】
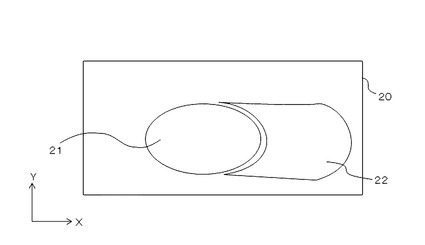
上述の各実施の形態においては、外周センサ部22は、円周に沿って4箇所設けるような形態としたが、このような形態に限らない。外周センサ部22は、3箇所以下であってもよいし、外周センサ部22は、円周に沿って設けられていなくてもよい。図18および図19は、本実施の形態の変形例における基板20を表面側から見た平面図である。多方向操作部材4が、所定の一方向への移動のみを検出したい場合には、外周センサ部22は、一方向にのみ設けられるようにしてもよい。たとえば、図18のように中心センサ部21のX方向側に1つの外周センサ部22を設けることで、X方向への移動および移動先でのクリックを検出するための多方向操作部材となる。また、図19に示すように、中心センサ部21の周囲に3箇所の外周センサ部22を設けても良い。
【0083】
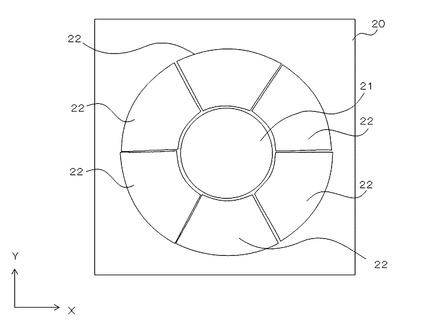
図20は、本実施の形態の別の変形例における基板20を表面側から見た平面図である。外周センサ部22は、5箇所以上設けられてもよく、たとえば、図20に示すように6箇所設けられてもよい。外周センサ部22の数が多くなると、移動方向をより正確に認識できる。
【0084】
上述の実施の形態では、制御部40は、各外周センサ部22で検出された静電容量をスカラー量としたベクトルを生成し、それらのベクトル合成により、操作方向および操作量を特定できる。しかし、このような形態に限らず、制御部40は、操作方向のみを特定してもよいし、操作方向と操作量の両方を特定しても良い。
【0085】
また、制御部40は、以下のような方法で操作方向を判断しても良い。まず、制御部40は、C1,C2,C3,C4のうち静電容量が最大であった外周センサ部22を特定する。そして、制御部40は、最大の静電容量を検出した外周センサ部22の方向へ操作されたと認識する。たとえば、制御部40は、C1が最大であった場合には、X方向とY方向との合成方向に操作されたと判断し、C2が最大であった場合には、X方向と−Y方向との合成方向に操作されたと判断し、C3が最大であった場合には、−Y方向と−X方向との合成方向に操作されたと判断し、C4が最大であった場合には、−X方向とY方向との合成方向に操作されたと判断する。かかる方法で判断される場合には、制御部40は、所定の操作方向(外周センサ22が設けられた方向)のうち、どの方向へ操作されたかを特定できる。
【0086】
図21は、各実施の形態の変形例において、記憶部41が有する制御用テーブルの一例である。予め図21に示す制御用テーブルを記憶部41に格納し、制御部40が当該制御用のテーブルを参照して操作方向および操作量を特定するようにしてもよい。このテーブルは、たとえば、様々な方向に操作板11を移動させて、移動した位置を「座標位置(X,Y)」欄に、各位置で測定されたC1,C2,C3,C4の実測値をそれぞれ「測定値C1」、「測定値C2」、「測定値C3」および「測定値C4」の欄に入力することで作成される。図21に示すテーブルを制御部40が用いる場合には、制御部40は、検出されたC1,C2,C3,C4の各数値と「測定値C1」、「測定値C2」、「測定値C3」および「測定値C4」の各数値とが最も近い行を抽出し、その行に記載された座標位置(X,Y)を、操作板11の中心が移動した先の位置であると判断できる。
【産業上の利用可能性】
【0087】
本発明は、たとえば、各種電子機器の入力装置等に利用することができる。
【符号の説明】
【0088】
1 リモートコントローラ(電子機器)
4,50,102 多方向操作部材
10,52 操作部
11,54 操作板
14 ドーム部
15 延出部
16 開口部
17 突出部
18 伸縮部材
20,80 基板
21 中心センサ部(センサ部、中心センサ部)
22,22a,22b,22c,22d 外周センサ部(センサ部、外周センサ部)
40 制御部
100 ラップトップ型コンピュータ(電子機器)
101 キーボード
103 タッチパッド(入力部材)
【特許請求の範囲】
【請求項1】
導電部材の近接により静電容量を変化させる導電性のセンサ部を有する基板と、
上記基板の面に対して略水平に移動可能である操作部と、を有し、
上記操作部は、上記基板側に開口部を対向させるドーム部と、当該開口部の外周縁から外側へ延出する延出部とを有すると共に、上記センサ部と非接触状態の上記導電部材を備え、
上記センサ部は、上記ドーム部の頂点と押圧方向で重なる位置に設けられた中心センサ部と、当該中心センサ部の外側に設けられる1以上の外周センサ部と、を有することを特徴とする多方向操作部材。
【請求項2】
請求項1に記載の多方向操作部材であって、
前記操作部は、前記基板の面に対して略水平に移動させると定位置に付勢する伸縮部材により支持されていることを特徴とする請求項1に記載の多方向操作部材。
【請求項3】
請求項1または請求項2に記載の多方向操作部材であって、
前記延出部の前記基板側の面には、前記基板側に突出する突出部が設けられていることを特徴とする多方向操作部材。
【請求項4】
請求項1から請求項3のいずれか1項に記載の多方向操作部材であって、
前記外周センサ部は、前記中心センサ部の中心を基準として周方向に略90度の角度を成して4箇所に配置されていることを特徴とする多方向操作部材。
【請求項5】
請求項1から請求項4のいずれか1項に記載の多方向操作部材であって、
操作面に略水平に移動可能であると共に、ユーザーが指で触れた位置を少なくとも検出可能な入力部材が操作部の表面側に固着されていることを特徴とする多方向操作部材。
【請求項6】
導電部材の近接により静電容量を変化させる導電性のセンサ部を有する基板と、
上記基板の面に対して略水平に移動可能である操作部と、を有し、
上記操作部は、上記基板側に開口部を対向させるドーム部と、当該開口部の外周縁から外側へ延出する延出部と、を有すると共に、上記センサ部と非接触状態の上記導電部材を備え、
上記センサ部は、上記ドーム部の頂点に押圧方向で重なる位置に設けられた中心センサ部および当該中心センサ部の外側に設けられる1以上の外周センサ部を備える多方向操作部材と、
上記導電性のセンサ部における静電容量を検出すると共に、静電容量に応じて上記ドーム部の押込みの有無および上記操作部の位置を特定する制御部と、
を有することを特徴とする電子機器。
【請求項7】
請求項6に記載の電子機器であって、
前記外周センサ部は、前記中心センサ部の中心を基準として周方向に略90度の角度を成すように4箇所に配置され、
前記制御部は、それら4枚の前記外周センサ部においてそれぞれ検出された静電容量と前記外周センサ部の配置方向に基づいて、前記操作板の移動方向あるいは移動量を特定することを特徴とする電子機器。
【請求項8】
請求項6または請求項7に記載の電子機器であって、
操作面に略水平に移動可能であると共に、ユーザーが指で触れた位置を少なくとも検出可能な入力部材が操作部の表面側に固着されていることを特徴とする電子機器。
【請求項9】
請求項8に記載の電子機器であって、
前記多方向操作部材は、キーボードに隣接して設けられていることを特徴とする電子機器。
【請求項1】
導電部材の近接により静電容量を変化させる導電性のセンサ部を有する基板と、
上記基板の面に対して略水平に移動可能である操作部と、を有し、
上記操作部は、上記基板側に開口部を対向させるドーム部と、当該開口部の外周縁から外側へ延出する延出部とを有すると共に、上記センサ部と非接触状態の上記導電部材を備え、
上記センサ部は、上記ドーム部の頂点と押圧方向で重なる位置に設けられた中心センサ部と、当該中心センサ部の外側に設けられる1以上の外周センサ部と、を有することを特徴とする多方向操作部材。
【請求項2】
請求項1に記載の多方向操作部材であって、
前記操作部は、前記基板の面に対して略水平に移動させると定位置に付勢する伸縮部材により支持されていることを特徴とする請求項1に記載の多方向操作部材。
【請求項3】
請求項1または請求項2に記載の多方向操作部材であって、
前記延出部の前記基板側の面には、前記基板側に突出する突出部が設けられていることを特徴とする多方向操作部材。
【請求項4】
請求項1から請求項3のいずれか1項に記載の多方向操作部材であって、
前記外周センサ部は、前記中心センサ部の中心を基準として周方向に略90度の角度を成して4箇所に配置されていることを特徴とする多方向操作部材。
【請求項5】
請求項1から請求項4のいずれか1項に記載の多方向操作部材であって、
操作面に略水平に移動可能であると共に、ユーザーが指で触れた位置を少なくとも検出可能な入力部材が操作部の表面側に固着されていることを特徴とする多方向操作部材。
【請求項6】
導電部材の近接により静電容量を変化させる導電性のセンサ部を有する基板と、
上記基板の面に対して略水平に移動可能である操作部と、を有し、
上記操作部は、上記基板側に開口部を対向させるドーム部と、当該開口部の外周縁から外側へ延出する延出部と、を有すると共に、上記センサ部と非接触状態の上記導電部材を備え、
上記センサ部は、上記ドーム部の頂点に押圧方向で重なる位置に設けられた中心センサ部および当該中心センサ部の外側に設けられる1以上の外周センサ部を備える多方向操作部材と、
上記導電性のセンサ部における静電容量を検出すると共に、静電容量に応じて上記ドーム部の押込みの有無および上記操作部の位置を特定する制御部と、
を有することを特徴とする電子機器。
【請求項7】
請求項6に記載の電子機器であって、
前記外周センサ部は、前記中心センサ部の中心を基準として周方向に略90度の角度を成すように4箇所に配置され、
前記制御部は、それら4枚の前記外周センサ部においてそれぞれ検出された静電容量と前記外周センサ部の配置方向に基づいて、前記操作板の移動方向あるいは移動量を特定することを特徴とする電子機器。
【請求項8】
請求項6または請求項7に記載の電子機器であって、
操作面に略水平に移動可能であると共に、ユーザーが指で触れた位置を少なくとも検出可能な入力部材が操作部の表面側に固着されていることを特徴とする電子機器。
【請求項9】
請求項8に記載の電子機器であって、
前記多方向操作部材は、キーボードに隣接して設けられていることを特徴とする電子機器。
【図1】


【図2】
【図3】
【図4】
【図5】

【図6】

【図7】
【図8】
【図9】
【図10】
【図11】

【図12】
【図13】
【図14】
【図15】
【図16】

【図17】
【図18】
【図19】

【図20】
【図21】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2011−228251(P2011−228251A)
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願番号】特願2010−205247(P2010−205247)
【出願日】平成22年9月14日(2010.9.14)
【出願人】(000190116)信越ポリマー株式会社 (1,394)
【Fターム(参考)】
【公開日】平成23年11月10日(2011.11.10)
【国際特許分類】
【出願日】平成22年9月14日(2010.9.14)
【出願人】(000190116)信越ポリマー株式会社 (1,394)
【Fターム(参考)】
[ Back to top ]