
多方向検出装置
【課題】
より簡易な構造で、方向検出感度の高い多方向検出装置を提供する。
【解決手段】
本発明は、その中央から径方向外側に向かう複数方向の各位置において、裏側に向かって押圧操作できる揺動部材30と、揺動部材30の裏側に対向配置され、当該揺動部材30上の各位置における裏側への押圧を受けて、押圧操作されたことを検出するための印刷回路基板20と、押圧操作を検出する制御部とを備え、揺動部材30は、その裏側において、印刷回路基板20側に突出する1または複数の導電体41等を備え、印刷回路基板20は、揺動部材30からの押圧を受けて導電体41等との接触面積に応じて抵抗が変わる複数の接点電極群101等を備え、制御部110は、導電体41等と複数の接点電極群101等との接触面積により変化する電気抵抗値若しくは電圧値に基づいてベクトルを生成するベクトル生成部111と、各ベクトルの合成により操作方向を検出する操作方向検出部111とを含む多方向検出装置1に関する。
より簡易な構造で、方向検出感度の高い多方向検出装置を提供する。
【解決手段】
本発明は、その中央から径方向外側に向かう複数方向の各位置において、裏側に向かって押圧操作できる揺動部材30と、揺動部材30の裏側に対向配置され、当該揺動部材30上の各位置における裏側への押圧を受けて、押圧操作されたことを検出するための印刷回路基板20と、押圧操作を検出する制御部とを備え、揺動部材30は、その裏側において、印刷回路基板20側に突出する1または複数の導電体41等を備え、印刷回路基板20は、揺動部材30からの押圧を受けて導電体41等との接触面積に応じて抵抗が変わる複数の接点電極群101等を備え、制御部110は、導電体41等と複数の接点電極群101等との接触面積により変化する電気抵抗値若しくは電圧値に基づいてベクトルを生成するベクトル生成部111と、各ベクトルの合成により操作方向を検出する操作方向検出部111とを含む多方向検出装置1に関する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、多方向検出可能な多方向検出装置に関する。
【背景技術】
【0002】
従来から、車載用機器、多機能固定電話機、携帯電話機等において、その操作パネル内のボタンを押した際にその押圧を感知して入力を認識可能な入力装置が搭載されている。当該入力装置の中には、単なるオン・オフではなく、ボタンの押圧の程度によって異なる機能を発揮させるものもある。かかる機能を発揮するための構造として、接点部を半球状の導電ゴムから成る導電体とし、当該導電体の曲面底部が印刷回路基板上の接点電極群と対向するように、その導電体を操作板の裏側に配置したものが知られている(例えば、特許文献1を参照)。
【0003】
導電ゴム製の導電体を用いると、ボタンを押す力に応じて、その導電体と接点電極群との接触面積を変えることができ、その結果、接点電極群を構成する電極間の電気抵抗値の大きさを、ボタンを押す力に依存させることができる。したがって、ボタンを上下左右の4方向に操作可能な多方向スイッチ部材とすれば、各方向において、押圧に応じた機能を発揮させることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−083819号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上述の多方向スイッチ部材を備える多方向検出装置には、次のような問題がある。多方向スイッチ部材の小型化が進み、その面積が親指の大きさ程度になってくると、多方向スイッチ部材の特定方向を押圧した際に、隣接する他の方向キーも同時に押圧してしまうことが少なくない。例えば操作者が上方向を押圧したつもりであっても右斜め上方も同時に押圧し、あるいは右斜め上方を押圧したつもりであっても上方向および右方向を同時に押圧する可能性がある。単に、各方向キーのオン・オフを検出する電極群を各方向キーの数だけ印刷回路基板に形成しただけでは、上記のような複数の方向キーを押圧したような場合に特定の方向キーの機能を発揮させることができない。
【0006】
このような状況への対応策として、例えば、多くの接点電極群を印刷回路基板に形成するのみならず、当該各接点電極群に対する押圧に依存する電気抵抗値若しくは電圧値等の計測値を比較して、最も押圧の大きな方向キーを操作したい方向キーと決定し、その方向キーの機能を発揮させる方法が考えられる。しかし、上記のような方法では、予め決められた方向を特定することができるものの、任意の方向を特定することができない。その結果、表示部に表示されるカーソルを任意の方向にスムーズに移動させ、あるいは多方向キーを回転操作するときに、その回転の検出を迅速かつスムーズに行うことが難しくなる。導電体およびそれと接触する接点電極群の数を無制限に増やすことが可能であれば、上記の障害は小さくなるが、多方向スイッチ部材の小型化が進むと、導電体および接点電極群の数を増やすことが難しくなる。
【0007】
本発明は、かかる問題を解消すべくなされたものであって、より簡易な構造で、方向検出感度の高い多方向検出装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するための本発明の一実施形態は、その中央から径方向外側に向かう複数方向の各位置において、裏側に向かって押圧操作できる揺動部材と、当該揺動部材の裏側に対向配置され、当該揺動部材上の各位置における裏側への押圧を受けて、押圧操作されたことを検出するための印刷回路基板と、押圧操作を検出する制御部とを備え、揺動部材は、その裏側において、印刷回路基板側に突出する1または複数の導電体を備え、印刷回路基板は、揺動部材からの押圧を受けて導電体との接触面積に応じて抵抗が変わる複数の接点電極群を備え、制御部が、導電体と複数の接点電極群との接触面積により変化する電気抵抗値若しくは電圧値に基づいてベクトルを生成するベクトル生成部と、各ベクトルの合成により操作方向を検出する操作方向検出部とを含む多方向検出装置である。
【0009】
また、別の本発明の一実施形態は、導電体を揺動部材の周方向に複数配置し、接点電極群を印刷回路基板上において、個々の導電体と対向して複数配置した多方向検出装置である。
【0010】
また、別の本発明の一実施形態は、印刷回路基板の接点電極群を配置している面において、複数の接点電極群を結ぶ円の中心から接点電極群より外側に、1または2以上のドーム型スイッチを備え、複数の接点電極群を互いに独立して形成した多方向検出装置である。
【0011】
また、別の本発明の一実施形態は、制御部に、各ベクトルの合成に先立ち各接点電極群における電気抵抗値若しくは電圧値に基づく信号に対して、メモリ内の式を用いて、各信号間の大きさのバラツキの影響を低減させるための正規化処理を行う正規化処理部を含む多方向検出装置である。
【0012】
また、別の本発明の一実施形態は、正規化処理部により、接点電極群ごとに、各接点電極群の所定期間内における電気抵抗値若しくは電圧値に基づく信号の検出幅に対する、各接点電極群において検出された電気抵抗値若しくは電圧値に基づく信号の相対的な割合を用いて、正規化処理を行う多方向検出装置である。
【発明の効果】
【0013】
本発明によれば、より簡易な構造で、方向検出感度の高い多方向検出装置を提供できる。
【図面の簡単な説明】
【0014】
【図1】図1は、本発明の実施の形態に係る多方向検出装置の一例である携帯電話の正面図である。
【図2】図2は、図1に示す携帯電話から取り外した多方向スイッチ部材の正面図である。
【図3】図3は、図2に示す多方向スイッチ部材のA−A線断面図である。
【図4】図4は、多方向スイッチ部材の主要部を表裏方向に分解した分解図である。
【図5】図5は、多方向スイッチ部材の揺動部材を裏返した状態を示す図である。
【図6】図6は、多方向スイッチ部材のPCBを表向きにした状態を示す図である。
【図7】図7は、図1に示す携帯電話の本体に備えられる制御部の例示的なハードウェアの構成図である。
【図8】図8は、各接点電極群における電圧を変換した信号を正規化するための回路を例示的に示すと共に、その正規化処理を説明するための図である。
【図9】図9は、多方向検出装置において操作方向を特定するまでの概略的な処理の流れを示すフローチャートである。
【図10】図10は、多方向検出装置におけるPCB上の8個の接点電極群に導電性弾性体を接触させたときの状態を例示的に示す図である。
【図11】図11は、図10に示す押圧状態において、各ベクトルを生成した状態を模式的に示す図である。
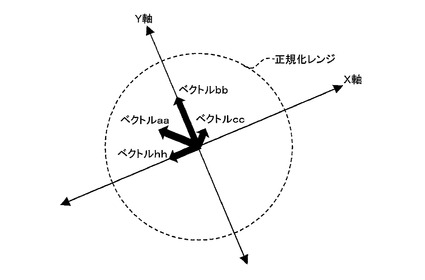
【図12】図12は、図11に示す状態から、各ベクトルを一次合成した状態を示す図である。
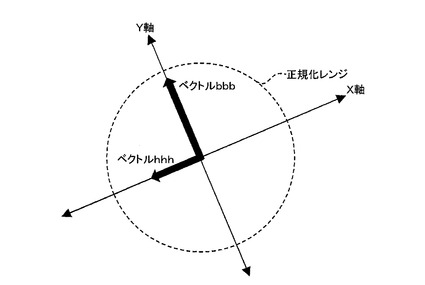
【図13】図13は、図12に示す状態に続いて、各ベクトルを二次合成した状態を示す図である。
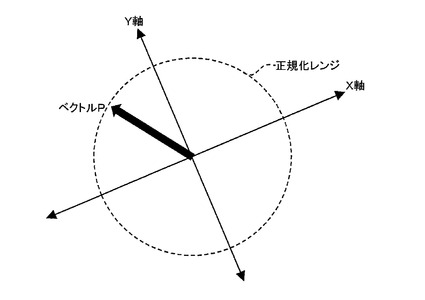
【図14】図14は、図13に示す状態に続いて、各ベクトルを三次合成した状態を示す図である。
【発明を実施するための形態】
【0015】
以下に、本発明の多方向検出装置の実施の形態について、図面を参照しながら説明する。なお、以下の実施の形態では、多方向検出装置として携帯電話を例に説明するが、多方向検出装置は携帯電話に限定されず、他の種類の機器、例えば、車載用のナビゲーション装置、携帯用薄型PC、音楽再生用携帯機器、あるいはそれらの機器を操作するためのリモートコントローラーなどでも良い。
【0016】
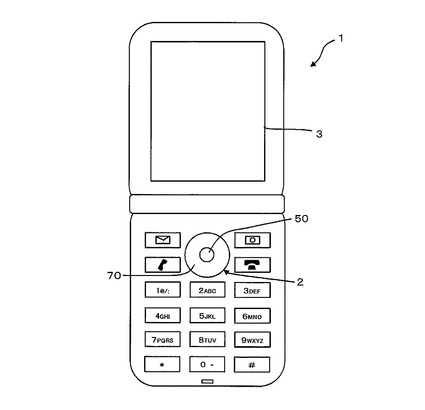
図1は、本発明の実施の形態に係る多方向検出装置の一例である携帯電話の正面図である。
【0017】
図1に示すように、この実施の形態に係る多方向検出装置の一例である携帯電話1は、多方向に操作可能な多方向スイッチ部材2および表示部3を備える。この実施の形態において、多方向スイッチ部材2は、正面から見て多方向に押圧操作可能である。多方向スイッチ部材2は、略円形のスイッチ部材であり、その中心から多方向に押圧入力できるのみならず、中央部分も押圧入力できる。ただし、多方向スイッチ部材2は、その中心が押圧入力できず、上記多方向にのみ押圧入力可能であっても良い。
【0018】
<1.多方向スイッチ部材の構造>
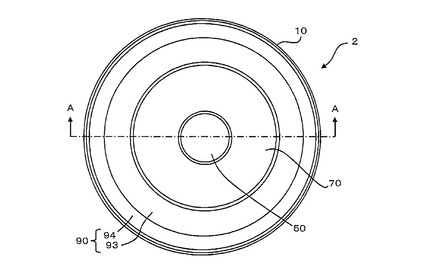
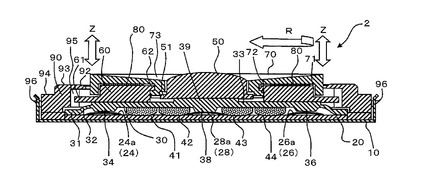
図2は、図1に示す携帯電話から取り外した多方向スイッチ部材の正面図である。図3は、図2に示す多方向スイッチ部材のA−A線断面図である。
【0019】
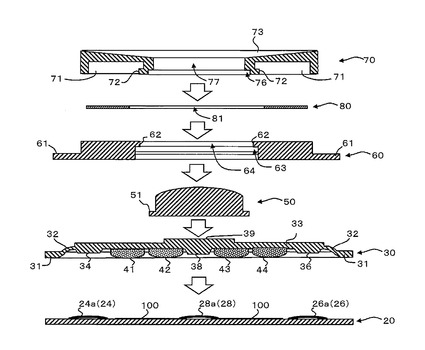
多方向スイッチ部材2は、図2および図3に示すように、薄型の円筒形状の皿状体10と、その皿状体10の内底面の直径より小径であって皿状体10の内底面上に配置される略円板状の印刷回路基板(PCB)20と、PCB20の表側の面の外周部に支持されてPCB20の表方向に配置される略円板状の揺動部材30と、揺動部材30の表側の面の略中心部分に配置される中央キー50と、揺動部材30の表側の面に、中央キー50を挿通して配置される略円環状の多方向操作板60と、多方向操作板60をその表方向から覆うように、中央キー50を挿通して配置される略円環状の回転操作板70と、多方向操作板60の表側の面と当該表側の面に対向する回転操作板70の内方天面との間に配置される略リング状の摩擦低減部材80と、皿状体10の内部にあってPCB20、揺動部材30、多方向操作板60および回転操作板70を、それらの側方から囲うように配置される略円環状の枠体90と、を備える。
【0020】
皿状体10は、薄い硬質樹脂から構成されており、その高さ方向の長さが底面の直径に比べて小さい薄型の略円筒部材である。皿状体10の底面には、PCB20の表側の面に形成されている電極や配線と接続されるリード線を挿通させるための1個あるいは複数個のスルーホール(不図示)が設けられている。また、皿状体10の側面上端部は外側に曲げられており、後述する枠体90を皿状体10の開口部からその内部へと入れやすくしている。
【0021】
PCB20は、好適には、ガラス繊維で編んだクロスにエポキシ樹脂を含浸させたガラスエポキシ製の回路基板である。ただし、PCB20として、ガラスコンポジット基板、アルミナ等から成るセラミックス基板を採用しても良い。PCB20の表側の面には、その略中心に1個のメタルドーム28が、そのメタルドーム28を囲むように複数の接点電極群(後述する)が、その接点電極群の径方向外側に複数のメタルドーム24a,26aを備えるドーム型スイッチ24,26等が、それぞれ配置されている。接点電極群の径方向外側に配置されるドーム型スイッチは、図3では2個しか見えていないが、図6に基づいて後述するように、実際には4個存在する。ここでは、図3において見えているメタルドームおよびそれを備えるドーム型スイッチのみを符号で示し、その他のメタルドームおよびそれを備えるドーム型スイッチを含めるように、「等」を用いて表す。メタルドーム24a,26a,28a等は、ほとんど同じ形状であって、その直径とほぼ等しいリング状の電極およびそのリング状の電極の内方に配置されるドット状の電極を覆うように配置される(不図示)。
【0022】
リング状の電極は、メタルドーム24a,26a,28a等の外周部と常に電気的に接続されている一方で、ドット状の電極は、メタルドーム24a,26a,28a等が押されていない状態ではメタルドーム24a,26a,28a等およびリング状の電極の双方と電気的に接続されていない。メタルドーム24a,26a,28a等は、PCB20側に向けて押されて、その力がある閾値を超えると、その頂部がへこみ、ドット状の電極と電気的に接続される。これによって、リング状の電極とドット状の電極とが導通し、スイッチがオンになる。
【0023】
揺動部材30は、熱可塑性エラストマー、熱硬化性エラストマー、天然ゴム等の弾性材料から構成されるスイッチの入力動作を行うための部材である。揺動部材30の材料としては、好適には、シリコーンゴムを用いることができる。揺動部材30は、その裏方向にあるPCB20とほぼ同じ直径を有し、その径方向外側から中心に向かって順に、円環状部材31、屈曲性ドーム32、円板33の各部材から構成される一体成形部材である。ただし、揺動部材30は、必ずしも上記各部材の一体成形部材であることを要せず、複数部材を接合・接着して形成されていても良い。揺動部材30は、その面内の中心から複数方向の外周部においてその表方向に配置される回転操作板70からの押圧を受けると、表裏方向(図3における両矢印Z方向)に揺動可能である。
【0024】
揺動部材30の最外側部分を形成する円環状部材31は、PCB20と側端面をほぼ揃える状態でPCB20の表側の面の外周部に載置される部分である。また、円環状部材31の内側に形成される屈曲性ドーム32は、揺動部材30に与えられる押圧およびその解除によって、屈曲性ドーム32の内側に形成される円板33がPCB20から浮いた状態とPCB20に向かって沈み込む状態とを可逆的に行うために必要な屈曲自在な部材である。円板33は、その裏面の外周部分に、裏方向に向かって突出する複数の押圧子34,36等を備えるとともに、その裏面の中央部分に、同じく裏方向に向かって突出する1個の押圧子38を備える。円板33の裏面の外周部分に備えられる押圧子は、図3では2個しか見えていないが、図5に基づいて後述するように、実際には4個存在する。ここでは、図3において見えている押圧子のみを符号で示し、その他の押圧子を含めるように、「等」を用いて表す。円板33の押圧子34,36,38等は、それぞれ、メタルドーム24a,26a,28a等と対向する位置に設けられる。また、円板33の表側の面の中央部には台座39が設けられる。台座39は、中央キー50を固定するための部分である。
【0025】
円板33の裏面における押圧子38から円板33の径方向外側には、押圧子38を囲うように、複数の導電体の一例である導電性弾性体41,42,43,44等が設けられる。図3では4個しか見えていないが、図5に示すように、実際には8個存在する。ここでは、図3において見えている導電性弾性体のみを符号で示し、その他の導電性弾性体を含めるように、「等」を用いて表す。導電性弾性体41,42,43,44等は、略半球形状を有しており、各先端をPCB20側に向けて、円板33の裏面に固定されている。導電性弾性体41,42,43,44等は、PCB20の表側の面に形成されている接点電極群に接触後に弾性変形できるように、柔軟性に富む材料で構成されている。また、導電性弾性体41,42,43,44等には、導電性を付与するために、導電性材料が分散されている。導電性材料としては、カーボンブラック、金属等を例示できるが、粒子径が小さいもの(ナノレベルの粒子)の製造が容易で、取り扱いも容易なカーボンブラックが、より好ましい。導電性材料の混合量は、導電性を高めかつ導電性弾性体41,42,43,44等の弾性を維持する観点から、母材と当該導電性材料の総重量に対して5〜50重量%であるのが好ましく、さらには、15〜35重量%がより好ましい。
【0026】
中央キー50は、好適には硬質樹脂から構成されている。中央キー50の底部には、その上部よりも大径のフランジ部51が形成されている。また、フランジ部51は、それを固定する台座39よりも大径である。
【0027】
多方向操作板60は、略円環状の部材であって、回転操作板70からの押圧を、揺動部材30に伝える部材である。多方向操作板60は、好適には、硬質樹脂から構成される。多方向操作板60の略中央にある穴は、中央キー50を配置すると共に後述の回転操作板70の一部が挿入可能なように、中央キー50の外径よりも十分に大きく形成されている。多方向操作板60の外側底部には、その外周に沿って径方向外側に向けて突出する外方突出部61を備える。外方突出部61は、多方向操作板60の底面と面一となるように形成されている。外方突出部61は、揺動部材30のドーム32よりも外側に突出する。また、多方向操作板60の略中央にある穴の内周面には、その内周面に沿うように、穴の中心に向けて突出する内方突出部62を備える。内方突出部62は、多方向操作板60の表側の面と面一となるように形成されている。なお、内方突出部62の突出長さは、外方突出部61の突出長さよりも短い。
【0028】
回転操作板70は、揺動部材30の表側方向に、揺動部材30の外周部を押圧可能であって、それ自体の面内において自転可能な略円環状のキーである。例えば、図3に示す矢印Rの方向(矢印Rと逆方向でも良い)に回転操作板70を自転させることにより、その自転の際に任意の方位にて、その裏方向に配置される多方向操作板60と揺動部材30をPCB20の方向に押圧することができる。回転操作板70は、好適には硬質樹脂あるいはエラストマーから構成される。回転操作板70の略中央にある穴(後述する)は、中央キー50の外径よりもわずかに大きく、かつ多方向操作板60の略中央の穴よりも小さく形成されている。回転操作板70の裏面から内方には、その周方向に沿うように、内方へと窪む凹部71が形成されている。その凹部71は、多方向操作板60側に開口し、外側面を略垂直に、内底面を水平に、内側面を内方天面の途中まで略垂直にしつつ当該内方天面近傍を回転操作板70の径方向内側に向かって窪ませた形状を有する。このため、凹部71の開口面の内側には、回転操作板70の径方向外側に向かって突出するツメ部72が存在する。凹部71のツメ部72の内方に形成された窪みは、多方向操作板60の内方突出部62と嵌め込み可能な大きさに形成されている。
【0029】
回転操作板70の表側の面は、その径方向外側から内側に向かって下方傾斜する傾斜面73となっている。ただし、傾斜面73を、水平面あるいは外側に向かって下方傾斜する面にしても良い。
【0030】
摩擦低減部材80は、多方向操作板60の表側の面と、回転操作板70の凹部71の内方天面との間に配置される略円板状のシートである。摩擦低減部材80は、好適には、フッ素系樹脂、特に、ポリテトラフルオロエチレンから成る。また、摩擦低減部材80は、多方向操作板60の表側の面に接着等により固定されるようにするのが好ましい。この結果、多方向操作板60と相対的に回転する回転操作板70が、摩擦低減部材80上をすべるように回転することができる。ただし、摩擦低減部材80を凹部71の内方天面に接着等により固定しても良い。また、摩擦低減部材80は、多方向操作板60の表側の面のみならず、回転操作板70の凹部71と接する可能性のある他の面に配置することもできる。
【0031】
枠体90は、好適には、金属あるいは硬質樹脂から構成される。枠体90は、その径方向内側にある表側の面93、当該表側の面93よりも径方向外側にあって、皿状体10の内底面側に一段下がった段差面94を有する。枠体90の中央には、表裏方向に貫通する穴95が形成されている。穴95は、PCB20、揺動部材30、多方向操作板60および回転操作板70を、それらの側面から囲うための領域である。穴95は、表裏方向に3段階に径を変えて形成されている。穴95の底部開口部近傍は、最も大径に形成されており、主に、PCB20および揺動部材30の円環状部材31が配置される領域である。穴95の中段領域は、上述の底部開口部近傍から一段内側へと小径に形成されており、主に、揺動部材30のドーム32、円板33、多方向操作板60の外方突出部61が配置される領域である。特に、中段領域は、外方突出部61が表裏方向および径方向外側にて穴95の内壁に接触しないように十分な大きさに形成されている。穴95の表方向の開口部近傍は、表側の面93から面一で径方向内側に延出する内方突出部92によって、中段領域よりも小径に形成されており、主に、回転操作板70が配置される領域である。また、枠体90の外側には、固定部位96が形成されており、皿状体10と枠体90を固定できるようになっている。この実施の形態では、固定部位96は、枠体90側に収納および枠体90の径方向外側に突出できる突起であり、皿状体10の側面に形成されるスリット(不図示)を貫通可能なものであるが、皿状体10と枠体90とを固定できる部材であれば、これに限定されない。
【0032】
図4は、多方向スイッチ部材の主要部を表裏方向に分解した分解図である。なお、図4では、皿状体10と枠体90を除外している。
【0033】
多方向操作板60の略中央の穴の内周面には、回転操作板70の凹部71に嵌め込まれる内方突出部62が形成されている。この結果、その穴の内周面には段差が形成され、略中央の穴は、揺動部材30から回転操作板70に向かって、大径な穴63と、小径な穴64とが連続する形態となっている。また、回転操作板70の略中央の穴の内周面にも段差が形成されており、当該略中央の穴は、多方向操作板60から表方向に向かって、大径な穴76と、小径な穴77とが連続する形態となっている。
【0034】
摩擦低減部材80は、多方向操作板60の表側の面に接着にて固定される。摩擦低減部材80を固定した多方向操作板60の表側の面には、回転操作板70が取り付けられる。この取り付けの際に、多方向操作板60の内方突出部62は、回転操作板70の凹部71の開口部にあるツメ部72に接触するが、その接触する部分の長さが短いため、内方突出部62あるいは/およびツメ部72が多少変形し、内方突出部62がツメ部72を通過し凹部71内に入る。
【0035】
中央キー50は、接着等により揺動部材30の台座39に固定される。PCB20は、揺動部材30の円環状部材31と接着等により固定される。PCB20に揺動部材30を固定した状態では、押圧子34,36,38等がメタルドーム24a,26a,28a等をへこませないようになっている。また、多方向操作板60の裏面と、揺動部材30を構成している円板33の表側の面とは、接着および/またはねじ止めにて固定される。中央キー50のフランジ部51は、回転操作板70の穴77には挿入できないようになっており、中央キー50は、その天面からの押圧およびその解除により、穴76より裏方向の領域で可動となっている。
【0036】
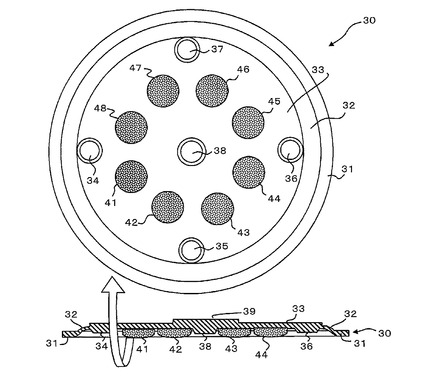
図5は、多方向スイッチ部材の揺動部材を裏返した状態を示す図である。
【0037】
揺動部材30の裏面の略中央には、1個の押圧子38が設けられている。また、その中央から径方向外側であってドーム32の近傍には、円板33の周方向に沿って等間隔(中心角:略90度)で、押圧子34,35,36,37が設けられている。押圧子34,35,36,37,38は、円板33に対して別体で固定されているが、円板33と同じ材料で一体的に形成されていても良い。押圧子34,35,36,37より径方向内側の領域には、円板33の周方向に沿って等間隔(中心角:45度)で、導電性弾性体41,42,43,44,45,46,47,48が設けられている。導電性弾性体41,42,43,44,45,46,47,48は、円板33に対して別体で固定されている。導電性弾性体41,42,43,44,45,46,47,48は、PCB20の表側の面に形成されている接点電極群に接する必要から、当該接点電極群よりも突出するメタルドーム24a,26a,28aに接する押圧子34,36,38等に比べて、それらの先端がPCB20の表側の面に近くなるように設けられている。
【0038】
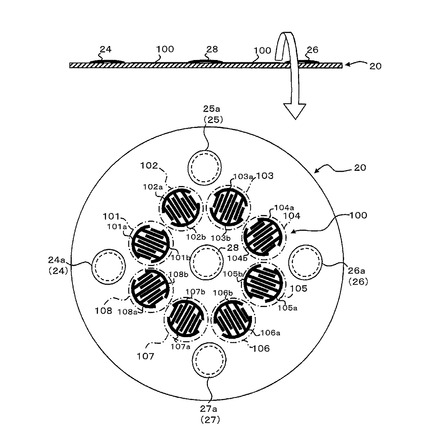
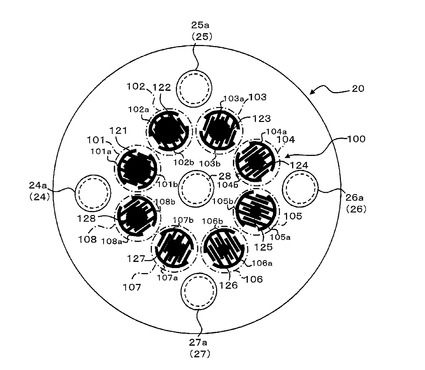
図6は、多方向スイッチ部材のPCBを表向きにした状態を示す図である。
【0039】
PCB20の表側の面には、複数の接点電極群を含むプリント配線100が形成されている。プリント配線100において、各導電性弾性体41,42,43,44,45,46,47,48の直下にそれぞれ対応する位置には、接点電極群101,102,103,104,105,106,107,108が互いに独立して形成されている。接点電極群101は、多くの歯を有する電極(以後、櫛歯電極)101aおよび101bを、互いに隣接する歯を交差させるようにして非接触状態で配置した電極群である。接点電極群102〜108も、同様に、それぞれ、櫛歯電極102a,102b、櫛歯電極103a,103b、櫛歯電極104a,104b、櫛歯電極105a,105b、櫛歯電極106a,106b、櫛歯電極107a,107bおよび櫛歯電極108a,108bから構成される。接点電極群101,102,103,104,105,106,107,108は、それぞれ、揺動部材30に設けられる導電性弾性体41,42,43,44,45,46,47,48の接触によって導通可能になる。ただし、揺動部材30の上から押圧していない状態において、各導電性弾性体41,42,43,44,45,46,47,48が各接点電極群101,102,103,104,105,106,107,108とわずかに接触して導通状態にあり、揺動部材30の上からの押圧によって導電性弾性体41等と接点電極群101等との接触面積が増大し、接点電極群101等を構成する櫛歯電極101a,101b等の間の電気抵抗値がより低くなるようにしても良い。
【0040】
このように、各導電性弾性体41,42,43,44,45,46,47,48と各接点電極群101,102,103,104,105,106,107,108とが最初から接触しているか否かにかかわらず、各導電性弾性体41,42,43,44,45,46,47,48から各接点電極群101,102,103,104,105,106,107,108に加える押圧が大きくなると、各接点電極群101,102,103,104,105,106,107,108に接触する各導電性弾性体41,42,43,44,45,46,47,48の面積が大きくなる。その結果、各櫛歯電極101a,101b等の間の電気抵抗値が小さくなる。すなわち、各導電性弾性体41,42,43,44,45,46,47,48は、各接点電極群101,102,103,104,105,106,107,108を構成している各櫛歯電極101a,101b等の間の電気抵抗値を変えることができる可変抵抗機能を発揮する。
【0041】
PCB20の表側の面における各接点電極群101,102,103,104,105,106,107,108よりも径方向外側であって、各押圧子34,35,36,37と対向する位置には、それぞれ、1個のドーム型スイッチ24,25,26,27が配置されている。また、押圧子38と対向する位置には、1個のドーム型スイッチ28が配置されている。回転操作板70の表面の外周部位あるいは中央キー50をPCB20に向けて押圧すると、その押圧した位置に相当するメタルドーム24a,25a,26a,27a,28aをへこませることができる。その結果、メタルドーム24a,25a,26a,27a,28aの各中央部分がその直下にあるドット状の電極に接触し、メタルドーム24a,25a,26a,27a,28aと常時接続されているリング状の電極とドット状の電極とが電気的に接続され、スイッチがオンになる。メタルドーム24a,25a,26a,27a,28aをへこませてスイッチをオンにするために必要な押圧の方が、導電性弾性体41,42,43,44,45,46,47,48が接点電極群101,102,103,104,105,106,107,108に接触して電圧値がある閾値を通過してスイッチがオンになるために必要な押圧に比べて大きくなるように、メタルドーム24a,25a,26a,27a,28aの材質、形状等を決めるのが好ましい。
【0042】
この実施の形態では、接点電極群101,102,103,104,105,106,107,108は、互いに独立した電極群である。接点電極群は、8個に限定されず、4個あるいはその他の数であっても良い。ただし、図6に示すように、ドーム型スイッチを互いに直交するラインの両端方向に4個設けるような場合には、接点電極群および導電性弾性体をともに8個とする方が、操作方向をより正確に検知することができる。理由は、次の通りである。導電性弾性体41,42,43,44,45,46,47,48の先端が球面の場合には、特に低荷重時の方向検出が不安定になる可能性がある。それは、メタルドーム24a等に近い導電性弾性体41等が接点電極群101等に接触する時に、押圧子34等がメタルドーム24a等に乗り上がるので、わずかに導電性弾性体41等が浮くためである。導電性弾性体と接点電極群とがともに4個の場合よりも、ともに8個とする方が、導電性弾性体41等の一部がわずかに浮いても、それに隣接する導電性弾性体42,43等がサポートしてくれる。この結果、操作方向の誤検知の確率が低くなる。
【0043】
<2.制御部の概略構成>
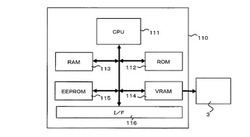
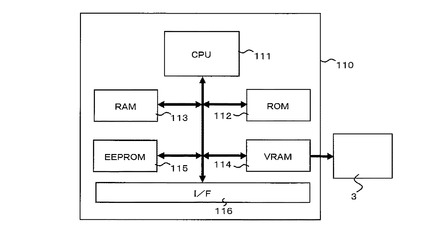
図7は、図1に示す携帯電話の本体に備えられる制御部の例示的なハードウェアの構成図である。
【0044】
制御部110は、中央処理装置(CPU)111と、読み出し専用のメモリ(ROM)112と、読み書き可能なメモリ(RAM)113と、ビデオRAM(VRAM)114と、電気若しくは電圧の操作でデータの消去若しくは書き換えを可能としたメモリ(EEPROM)115と、インターフェイス(I/F)116とを備える。制御部110は、多方向スイッチ部材2のPCB20上あるいはPCB20以外に設けることができる。
【0045】
ROM112は、CPU111の制御用プログラム等の読み出し専用の情報を格納したメモリである。RAM113は、オペレーションシステム(OS)、各種アプリケーションソフト、この実施の形態における押圧操作方向の決定を行うために必要なコンピュータプログラム等を格納した、読み書き可能なメモリである。
【0046】
コンピュータプログラムは、外部のネットワークを経由して携帯電話1にインストールされ、あるいは情報記録媒体を携帯電話1内のスロット(図示せず)に装填することにより制御部110内のRAM113若しくはEEPROM115に格納されるようにしても良い。
【0047】
VRAM114は、種々のデータを表示部3に表示する際に、そのデータを一時的にストックしておくメモリである。EEPROM115も、一時的にデータを書き込んでおくメモリである。インターフェイス116は、制御部110の外部からの信号を受信あるいはその外部に信号を送信する部分である。ここで、「制御部110の外部」には、「携帯電話1の外部」も含まれる。
【0048】
CPU111は、各導電性弾性体41,42,43,44,45,46,47,48と接点電極群101,102,103,104,105,106,107,108との接触面積により変化する電圧を変換した信号の大きさに応じてベクトルを生成し、各ベクトルの合成により操作方向を検出することができる。CPU111は、上記ベクトルを生成するベクトル生成部と、生成した各ベクトルを合成して操作方向を検出する操作方向検出部とを兼ねる。
【0049】
また、CPU111は、上記の各ベクトルの生成に先立ち、各接点電極群101,102,103,104,105,106,107,108における電圧を、メモリ内の式を用いて信号に変換する信号変換部およびその変換した信号をメモリ内の別の式を用いて正規化する正規化処理部である。ここで、正規化処理は、各信号間の大きさのバラツキの影響を低減させるための処理である。好適には、CPU111は、正規化処理部として、接点電極群101,102,103,104,105,106,107,108ごとに、各接点電極群101,102,103,104,105,106,107,108の所定期間内における信号の検出幅に対する、各接点電極群101,102,103,104,105,106,107,108における信号の相対的な割合を用いて正規化処理を行うことができる。正規化処理は、必須の処理ではなく、より好ましい実施の形態における任意の処理であるが、導電性弾性体41,42,43,44,45,46,47,48間の抵抗値のバラツキあるいは抵抗値の経時変化を考慮すると、正確な操作方向を検出するために好適な処理である。
【0050】
メモリであるROM112、RAM113およびEEPROM115の内の少なくとも1つには、各導電性弾性体41等が各接点電極群101等と接触した際の櫛歯電極101a,101b等の間の電圧を信号に変換するための式(信号変換の式)および当該信号を正規化するための式(正規化の式)が格納されている。信号変換の式としては、例えば、y=−ax+b(y:信号(y>0)、x:電圧(x>0)、aおよびb:正数)、あるいはy=a/x(y:信号(y>0)、x:電圧(x>0)、a:正数)のように、導電性弾性体41等が接点電極群101等に接触する面積が大きくなり櫛歯電極101a,101b間の電圧が小さくなると信号が大きくなるようにする式が好ましい。正規化の式については、後述する。
【0051】
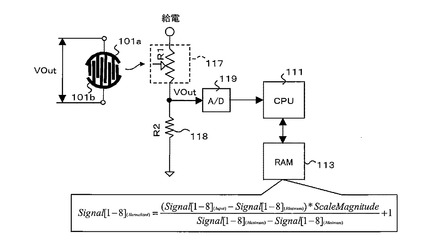
図8は、各接点電極群における電圧を変換した信号を正規化するための回路を例示的に示すと共に、その正規化処理を説明するための図である。
【0052】
接点電極群101等は、前述のように、一種の可変抵抗機能を持つ。各櫛歯電極101a,101b等の間の電気抵抗値は、導電性弾性体41等の接触面積により変化する。PCB20は、抵抗R1と抵抗R2とを直列につなぐ回路を有する。抵抗R1は、可変抵抗117であり、実際には、接点電極群101等に相当する。抵抗R2は、固定の抵抗値を持つ抵抗118である。接点電極群101の電圧(VOut)は、A/D変換器119にてデジタル値に変換される。CPU111は、メモリの一例であるRAM113内のコンピュータプログラムを読み、信号変換部として、先に説明した信号変換の式を用いて上記デジタル値を信号に変換し、さらに、正規化処理部として、当該コンピュータプログラム中の正規化の式(下記の数式)を用いて当該信号を正規化する。CPU111は、接点電極群101以外の他の接点電極群102〜108についても、上記と同様に信号の正規化処理を行う。
【0053】
【数1】

【0054】
上記数式中、Signal[1−8](Normalized)は、各接点電極群101,102,103,104,105,106,107,108における正規化処理後の信号を意味する。Signal[1−8](Maximum)およびSignal[1−8](Minimum)は、それぞれ、メモリ内に記憶されている信号の中の最大値および最小値を意味する。当該最大値および最小値は、導電性弾性体41等が押圧によりつぶれる過程で変化する抵抗に基づき生成される多くの信号の中で最大および最小の各値であって、RAM113やCPU111内の記憶部等のメモリに記録されている。ただし、信号は、メモリの空き容量が無くなると古い順に消去される。なお、メモリの容量オーバーではなく、所定期間(例えば、72時間)で、メモリ内の信号を古い順に消去するようにしても良い。Signal[1−8](input)は、導電性弾性体41等の接触を通じて検出された電圧値を変換した信号を意味する。Scale Magnitudeは係数(この実施の形態では、例えば、32)を意味する。
【0055】
例えば、接点電極群101において、メモリ内の信号の中の最大値(Signal[1](Maximum))および最小値(Signal[1](Minimum))が、それぞれ100および5であったとする。検出された電圧を変換した信号(Signal[1](input))は、15であり、係数(Scale Magnitude)が32に設定されているものとする。上記数式を用いると、正規化処理後の信号(Signal[1](Normalized))は、1+(15−5)×32/(100−5)=4.4となる。同様に、接点電極群102〜108についても、正規化処理後の各信号(Signal[2](Normalized)、Signal[3](Normalized)、Signal[4](Normalized)、Signal[5](Normalized)、Signal[6](Normalized)、Signal[7](Normalized)およびSignal[8](Normalized))を計算することができる。
【0056】
<3.操作方向の特定方法>
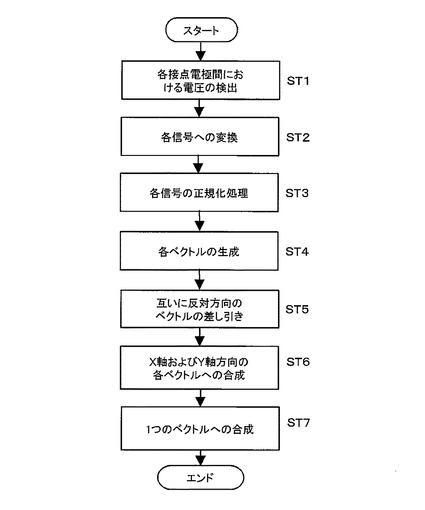
図9は、多方向検出装置において操作方向を特定するまでの概略的な処理の流れを示すフローチャートである。
【0057】
揺動部材30を押圧して導電性弾性体41,42,43,44,45,46,47,48の内の1以上を接点電極群101,102,103,104,105,106,107,108の1以上に接触させると、CPU111は、電圧検出部として、A/D変換器119を経由して、各接点電極群101,102,103,104,105,106,107,108における電圧値を検出する(ステップST1)。次に、CPU111は、RAM113内の所定のコンピュータプログラムを読み、信号変換部として、信号変換の式を用いて各接点電極群101,102,103,104,105,106,107,108における各電圧値から各信号への変換を行う(ステップST2)。次に、CPU111は、正規化処理部として、正規化の式を用いて、上記各信号の正規化処理を行う(ステップST3)。次に、CPU111は、ベクトル生成部として、電圧値の検出に関わる接点電極群101,102,103,104,105,106,107,108ごとに、正規化処理後の信号を利用してベクトルを生成する(ステップST4)。次に、CPU111は、第一操作方向検出部として、互いに反対方向のベクトルの差し引きを行う(ステップST5)。次に、CPU111は、第二操作方向検出部として、上記差し引き後のベクトルに対して、各接点電極群101,102,103,104,105,106,107,108の所定方向(「X軸方向」とする)およびこれと直交する方向(「Y軸方向」とする)の各ベクトルへの合成を行う(ステップST6)。次に、CPU111は、第三操作方向検出部として、1つの方向へのベクトル合成を行い、操作方向を特定する(ステップST7)。
【0058】
なお、上記の各ステップの内、ステップST5〜ST7を、1つのベクトルに合成する1つのステップのみとし、CPU111が操作方向検出部として当該1つのステップを実行するようにしても良い。
【0059】
図10は、多方向検出装置におけるPCB上の8個の接点電極群に導電性弾性体を接触させたときの状態を例示的に示す図である。図11、図12、図13および図14は、図10に示す押圧状態において、各ベクトルの生成からベクトルの第一次〜第三次合成までの各処理を図示したものである。
【0060】
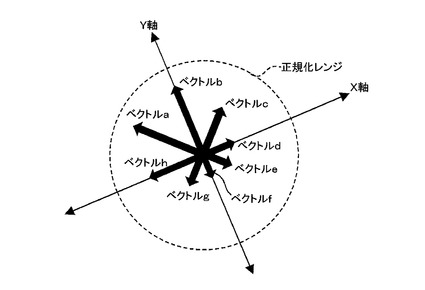
操作者が回転操作板70上のある箇所を押圧した際に、図10に示すように、各導電性弾性体41,42,43,44,45,46,47,48が各接点電極群101,102,103,104,105,106,107,108と、それぞれ接触部121,122,123,124,125,126,127,128にて接触した例にて、操作方向を特定する処理を説明する。便宜上、接点電極群102と接点電極群106とを結ぶ軸をX軸、接点電極群104と接点電極群108とを結ぶ軸をY軸とする。
【0061】
図11に示すように、各接触部121,122,123,124,125,126,127,128の面積に応じて、それぞれ、ベクトルa,b,c,d,e,f,g,hが生成される。これらのベクトルa,b,c,d,e,f,g,hは、上述のように正規化の式を経た信号から生成されているので、ベクトルの正規化レンジの範囲内にある。例えば、上記の正規化のための式中のScale Magnitudeを32とすると、正規化後の信号は、半径が33の正規化レンジの範囲内にある。ベクトルa,b,c,d,e,f,g,hの生成後、互いに反対方向の2つのベクトルにつき差し引きを行うと、図12に示すように、ベクトルaa,bb,cc,hhの4つのベクトルに合成できる。次に、各ベクトルをX軸成分とY軸成分に分けて、X軸方向およびY軸方向のベクトルに合成すると、図13に示すように、2つのベクトルbbb,hhhが生成できる。最後に、ベクトルbbbとベクトルhhhを合成すると、図14に示すように、1つのベクトルPが合成できる。この結果、操作方向および押圧力は、ベクトルPにより特定されることになる。
【0062】
<4.その他の実施の形態>
本発明の好適な実施の形態について説明したが、本発明は、次のように、種々変形を施して実施することもできる。
【0063】
導電性弾性体41等以外に、押圧によって接触する接点電極群101等の電圧値を変化させる導電体を用いてもよい。例えば、接点電極群101等に押し付けられると形状を変化する金属製の導電体を用いても良い。また、導電性弾性体41等の先端を平面(好ましくは、接点電極群101等の面と平行な面)としても良い。さらに、導電性弾性体41等を押圧していない状態で、導電性弾性体41等と接点電極群101等とを接触させて接点電極群101等に所定の電圧をかけておき、導電性弾性体41等への押圧が強くなるに従って、導電性弾性体41等と接点電極群101等との接触面積が大きくなり、それに伴い接点電極群101等の電圧が変化するようにしても良い。また、ベクトルの生成は、電圧値ではなく、電気抵抗値から変換した信号に基づいて行われても良い。
【0064】
導電体は、複数ではなく一つにし、複数の接点電極群101等に1または2以上の箇所で接触させるようにしても良い。ドーム型スイッチ24等は、必ずしも設けなくても良い。また、ドーム型スイッチ24等をPCB20上の接点電極群101等の内側に設けても良い。接点電極群101等を互いに独立して形成せず、複数の接点電極群101等を接続して1つの電極集合体を形成しても良い。例えば、8個の接点電極群101等から、4個の電極集合体を形成しても良い。
【0065】
前述の実施の形態における例示的な正規化の式中の「+1」の部分は無くても良い。ただし、ベクトルの大きさがゼロに近くなるのを防止するために、正規化の式を、上記のような「+1」、あるいは「+2」等の正数を加えた形の式にするのが好ましい。また、正規化処理に用いる信号は、接点電極群101等の電圧値を信号変換の式を用いて変換したものであるが、信号変換の式を用いることなく、当該電圧値あるいは電気抵抗値であっても良い。また、正規化処理を行う際に、信号の最大値と最小値を用いたが、最大値と最小値を用いる場合に限定されず、例えば2番目に大きな信号値と2番目に小さな信号値を用いても良い。
【産業上の利用可能性】
【0066】
本発明は、例えば、携帯電話、車載用のナビゲーション装置、携帯用薄型PC、音楽再生用携帯機器、あるいはそれらの機器を操作するためのリモートコントローラーなどに利用することができる。
【符号の説明】
【0067】
1 携帯電話(多方向検出装置)
20 PCB(印刷回路基板)
24,25,26,27,28 ドーム型スイッチ
30 揺動部材
41,42,43,44,45,46,47,48 導電性弾性体(導電体)
101,102,103,104,105,106,107,108 接点電極群
110 制御部
111 CPU(ベクトル生成部、操作方向検出部、正規化処理部)
112 ROM(メモリ)
113 RAM(メモリ)
115 EEPROM(メモリ)
【技術分野】
【0001】
本発明は、多方向検出可能な多方向検出装置に関する。
【背景技術】
【0002】
従来から、車載用機器、多機能固定電話機、携帯電話機等において、その操作パネル内のボタンを押した際にその押圧を感知して入力を認識可能な入力装置が搭載されている。当該入力装置の中には、単なるオン・オフではなく、ボタンの押圧の程度によって異なる機能を発揮させるものもある。かかる機能を発揮するための構造として、接点部を半球状の導電ゴムから成る導電体とし、当該導電体の曲面底部が印刷回路基板上の接点電極群と対向するように、その導電体を操作板の裏側に配置したものが知られている(例えば、特許文献1を参照)。
【0003】
導電ゴム製の導電体を用いると、ボタンを押す力に応じて、その導電体と接点電極群との接触面積を変えることができ、その結果、接点電極群を構成する電極間の電気抵抗値の大きさを、ボタンを押す力に依存させることができる。したがって、ボタンを上下左右の4方向に操作可能な多方向スイッチ部材とすれば、各方向において、押圧に応じた機能を発揮させることができる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2003−083819号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上述の多方向スイッチ部材を備える多方向検出装置には、次のような問題がある。多方向スイッチ部材の小型化が進み、その面積が親指の大きさ程度になってくると、多方向スイッチ部材の特定方向を押圧した際に、隣接する他の方向キーも同時に押圧してしまうことが少なくない。例えば操作者が上方向を押圧したつもりであっても右斜め上方も同時に押圧し、あるいは右斜め上方を押圧したつもりであっても上方向および右方向を同時に押圧する可能性がある。単に、各方向キーのオン・オフを検出する電極群を各方向キーの数だけ印刷回路基板に形成しただけでは、上記のような複数の方向キーを押圧したような場合に特定の方向キーの機能を発揮させることができない。
【0006】
このような状況への対応策として、例えば、多くの接点電極群を印刷回路基板に形成するのみならず、当該各接点電極群に対する押圧に依存する電気抵抗値若しくは電圧値等の計測値を比較して、最も押圧の大きな方向キーを操作したい方向キーと決定し、その方向キーの機能を発揮させる方法が考えられる。しかし、上記のような方法では、予め決められた方向を特定することができるものの、任意の方向を特定することができない。その結果、表示部に表示されるカーソルを任意の方向にスムーズに移動させ、あるいは多方向キーを回転操作するときに、その回転の検出を迅速かつスムーズに行うことが難しくなる。導電体およびそれと接触する接点電極群の数を無制限に増やすことが可能であれば、上記の障害は小さくなるが、多方向スイッチ部材の小型化が進むと、導電体および接点電極群の数を増やすことが難しくなる。
【0007】
本発明は、かかる問題を解消すべくなされたものであって、より簡易な構造で、方向検出感度の高い多方向検出装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するための本発明の一実施形態は、その中央から径方向外側に向かう複数方向の各位置において、裏側に向かって押圧操作できる揺動部材と、当該揺動部材の裏側に対向配置され、当該揺動部材上の各位置における裏側への押圧を受けて、押圧操作されたことを検出するための印刷回路基板と、押圧操作を検出する制御部とを備え、揺動部材は、その裏側において、印刷回路基板側に突出する1または複数の導電体を備え、印刷回路基板は、揺動部材からの押圧を受けて導電体との接触面積に応じて抵抗が変わる複数の接点電極群を備え、制御部が、導電体と複数の接点電極群との接触面積により変化する電気抵抗値若しくは電圧値に基づいてベクトルを生成するベクトル生成部と、各ベクトルの合成により操作方向を検出する操作方向検出部とを含む多方向検出装置である。
【0009】
また、別の本発明の一実施形態は、導電体を揺動部材の周方向に複数配置し、接点電極群を印刷回路基板上において、個々の導電体と対向して複数配置した多方向検出装置である。
【0010】
また、別の本発明の一実施形態は、印刷回路基板の接点電極群を配置している面において、複数の接点電極群を結ぶ円の中心から接点電極群より外側に、1または2以上のドーム型スイッチを備え、複数の接点電極群を互いに独立して形成した多方向検出装置である。
【0011】
また、別の本発明の一実施形態は、制御部に、各ベクトルの合成に先立ち各接点電極群における電気抵抗値若しくは電圧値に基づく信号に対して、メモリ内の式を用いて、各信号間の大きさのバラツキの影響を低減させるための正規化処理を行う正規化処理部を含む多方向検出装置である。
【0012】
また、別の本発明の一実施形態は、正規化処理部により、接点電極群ごとに、各接点電極群の所定期間内における電気抵抗値若しくは電圧値に基づく信号の検出幅に対する、各接点電極群において検出された電気抵抗値若しくは電圧値に基づく信号の相対的な割合を用いて、正規化処理を行う多方向検出装置である。
【発明の効果】
【0013】
本発明によれば、より簡易な構造で、方向検出感度の高い多方向検出装置を提供できる。
【図面の簡単な説明】
【0014】
【図1】図1は、本発明の実施の形態に係る多方向検出装置の一例である携帯電話の正面図である。
【図2】図2は、図1に示す携帯電話から取り外した多方向スイッチ部材の正面図である。
【図3】図3は、図2に示す多方向スイッチ部材のA−A線断面図である。
【図4】図4は、多方向スイッチ部材の主要部を表裏方向に分解した分解図である。
【図5】図5は、多方向スイッチ部材の揺動部材を裏返した状態を示す図である。
【図6】図6は、多方向スイッチ部材のPCBを表向きにした状態を示す図である。
【図7】図7は、図1に示す携帯電話の本体に備えられる制御部の例示的なハードウェアの構成図である。
【図8】図8は、各接点電極群における電圧を変換した信号を正規化するための回路を例示的に示すと共に、その正規化処理を説明するための図である。
【図9】図9は、多方向検出装置において操作方向を特定するまでの概略的な処理の流れを示すフローチャートである。
【図10】図10は、多方向検出装置におけるPCB上の8個の接点電極群に導電性弾性体を接触させたときの状態を例示的に示す図である。
【図11】図11は、図10に示す押圧状態において、各ベクトルを生成した状態を模式的に示す図である。
【図12】図12は、図11に示す状態から、各ベクトルを一次合成した状態を示す図である。
【図13】図13は、図12に示す状態に続いて、各ベクトルを二次合成した状態を示す図である。
【図14】図14は、図13に示す状態に続いて、各ベクトルを三次合成した状態を示す図である。
【発明を実施するための形態】
【0015】
以下に、本発明の多方向検出装置の実施の形態について、図面を参照しながら説明する。なお、以下の実施の形態では、多方向検出装置として携帯電話を例に説明するが、多方向検出装置は携帯電話に限定されず、他の種類の機器、例えば、車載用のナビゲーション装置、携帯用薄型PC、音楽再生用携帯機器、あるいはそれらの機器を操作するためのリモートコントローラーなどでも良い。
【0016】
図1は、本発明の実施の形態に係る多方向検出装置の一例である携帯電話の正面図である。
【0017】
図1に示すように、この実施の形態に係る多方向検出装置の一例である携帯電話1は、多方向に操作可能な多方向スイッチ部材2および表示部3を備える。この実施の形態において、多方向スイッチ部材2は、正面から見て多方向に押圧操作可能である。多方向スイッチ部材2は、略円形のスイッチ部材であり、その中心から多方向に押圧入力できるのみならず、中央部分も押圧入力できる。ただし、多方向スイッチ部材2は、その中心が押圧入力できず、上記多方向にのみ押圧入力可能であっても良い。
【0018】
<1.多方向スイッチ部材の構造>
図2は、図1に示す携帯電話から取り外した多方向スイッチ部材の正面図である。図3は、図2に示す多方向スイッチ部材のA−A線断面図である。
【0019】
多方向スイッチ部材2は、図2および図3に示すように、薄型の円筒形状の皿状体10と、その皿状体10の内底面の直径より小径であって皿状体10の内底面上に配置される略円板状の印刷回路基板(PCB)20と、PCB20の表側の面の外周部に支持されてPCB20の表方向に配置される略円板状の揺動部材30と、揺動部材30の表側の面の略中心部分に配置される中央キー50と、揺動部材30の表側の面に、中央キー50を挿通して配置される略円環状の多方向操作板60と、多方向操作板60をその表方向から覆うように、中央キー50を挿通して配置される略円環状の回転操作板70と、多方向操作板60の表側の面と当該表側の面に対向する回転操作板70の内方天面との間に配置される略リング状の摩擦低減部材80と、皿状体10の内部にあってPCB20、揺動部材30、多方向操作板60および回転操作板70を、それらの側方から囲うように配置される略円環状の枠体90と、を備える。
【0020】
皿状体10は、薄い硬質樹脂から構成されており、その高さ方向の長さが底面の直径に比べて小さい薄型の略円筒部材である。皿状体10の底面には、PCB20の表側の面に形成されている電極や配線と接続されるリード線を挿通させるための1個あるいは複数個のスルーホール(不図示)が設けられている。また、皿状体10の側面上端部は外側に曲げられており、後述する枠体90を皿状体10の開口部からその内部へと入れやすくしている。
【0021】
PCB20は、好適には、ガラス繊維で編んだクロスにエポキシ樹脂を含浸させたガラスエポキシ製の回路基板である。ただし、PCB20として、ガラスコンポジット基板、アルミナ等から成るセラミックス基板を採用しても良い。PCB20の表側の面には、その略中心に1個のメタルドーム28が、そのメタルドーム28を囲むように複数の接点電極群(後述する)が、その接点電極群の径方向外側に複数のメタルドーム24a,26aを備えるドーム型スイッチ24,26等が、それぞれ配置されている。接点電極群の径方向外側に配置されるドーム型スイッチは、図3では2個しか見えていないが、図6に基づいて後述するように、実際には4個存在する。ここでは、図3において見えているメタルドームおよびそれを備えるドーム型スイッチのみを符号で示し、その他のメタルドームおよびそれを備えるドーム型スイッチを含めるように、「等」を用いて表す。メタルドーム24a,26a,28a等は、ほとんど同じ形状であって、その直径とほぼ等しいリング状の電極およびそのリング状の電極の内方に配置されるドット状の電極を覆うように配置される(不図示)。
【0022】
リング状の電極は、メタルドーム24a,26a,28a等の外周部と常に電気的に接続されている一方で、ドット状の電極は、メタルドーム24a,26a,28a等が押されていない状態ではメタルドーム24a,26a,28a等およびリング状の電極の双方と電気的に接続されていない。メタルドーム24a,26a,28a等は、PCB20側に向けて押されて、その力がある閾値を超えると、その頂部がへこみ、ドット状の電極と電気的に接続される。これによって、リング状の電極とドット状の電極とが導通し、スイッチがオンになる。
【0023】
揺動部材30は、熱可塑性エラストマー、熱硬化性エラストマー、天然ゴム等の弾性材料から構成されるスイッチの入力動作を行うための部材である。揺動部材30の材料としては、好適には、シリコーンゴムを用いることができる。揺動部材30は、その裏方向にあるPCB20とほぼ同じ直径を有し、その径方向外側から中心に向かって順に、円環状部材31、屈曲性ドーム32、円板33の各部材から構成される一体成形部材である。ただし、揺動部材30は、必ずしも上記各部材の一体成形部材であることを要せず、複数部材を接合・接着して形成されていても良い。揺動部材30は、その面内の中心から複数方向の外周部においてその表方向に配置される回転操作板70からの押圧を受けると、表裏方向(図3における両矢印Z方向)に揺動可能である。
【0024】
揺動部材30の最外側部分を形成する円環状部材31は、PCB20と側端面をほぼ揃える状態でPCB20の表側の面の外周部に載置される部分である。また、円環状部材31の内側に形成される屈曲性ドーム32は、揺動部材30に与えられる押圧およびその解除によって、屈曲性ドーム32の内側に形成される円板33がPCB20から浮いた状態とPCB20に向かって沈み込む状態とを可逆的に行うために必要な屈曲自在な部材である。円板33は、その裏面の外周部分に、裏方向に向かって突出する複数の押圧子34,36等を備えるとともに、その裏面の中央部分に、同じく裏方向に向かって突出する1個の押圧子38を備える。円板33の裏面の外周部分に備えられる押圧子は、図3では2個しか見えていないが、図5に基づいて後述するように、実際には4個存在する。ここでは、図3において見えている押圧子のみを符号で示し、その他の押圧子を含めるように、「等」を用いて表す。円板33の押圧子34,36,38等は、それぞれ、メタルドーム24a,26a,28a等と対向する位置に設けられる。また、円板33の表側の面の中央部には台座39が設けられる。台座39は、中央キー50を固定するための部分である。
【0025】
円板33の裏面における押圧子38から円板33の径方向外側には、押圧子38を囲うように、複数の導電体の一例である導電性弾性体41,42,43,44等が設けられる。図3では4個しか見えていないが、図5に示すように、実際には8個存在する。ここでは、図3において見えている導電性弾性体のみを符号で示し、その他の導電性弾性体を含めるように、「等」を用いて表す。導電性弾性体41,42,43,44等は、略半球形状を有しており、各先端をPCB20側に向けて、円板33の裏面に固定されている。導電性弾性体41,42,43,44等は、PCB20の表側の面に形成されている接点電極群に接触後に弾性変形できるように、柔軟性に富む材料で構成されている。また、導電性弾性体41,42,43,44等には、導電性を付与するために、導電性材料が分散されている。導電性材料としては、カーボンブラック、金属等を例示できるが、粒子径が小さいもの(ナノレベルの粒子)の製造が容易で、取り扱いも容易なカーボンブラックが、より好ましい。導電性材料の混合量は、導電性を高めかつ導電性弾性体41,42,43,44等の弾性を維持する観点から、母材と当該導電性材料の総重量に対して5〜50重量%であるのが好ましく、さらには、15〜35重量%がより好ましい。
【0026】
中央キー50は、好適には硬質樹脂から構成されている。中央キー50の底部には、その上部よりも大径のフランジ部51が形成されている。また、フランジ部51は、それを固定する台座39よりも大径である。
【0027】
多方向操作板60は、略円環状の部材であって、回転操作板70からの押圧を、揺動部材30に伝える部材である。多方向操作板60は、好適には、硬質樹脂から構成される。多方向操作板60の略中央にある穴は、中央キー50を配置すると共に後述の回転操作板70の一部が挿入可能なように、中央キー50の外径よりも十分に大きく形成されている。多方向操作板60の外側底部には、その外周に沿って径方向外側に向けて突出する外方突出部61を備える。外方突出部61は、多方向操作板60の底面と面一となるように形成されている。外方突出部61は、揺動部材30のドーム32よりも外側に突出する。また、多方向操作板60の略中央にある穴の内周面には、その内周面に沿うように、穴の中心に向けて突出する内方突出部62を備える。内方突出部62は、多方向操作板60の表側の面と面一となるように形成されている。なお、内方突出部62の突出長さは、外方突出部61の突出長さよりも短い。
【0028】
回転操作板70は、揺動部材30の表側方向に、揺動部材30の外周部を押圧可能であって、それ自体の面内において自転可能な略円環状のキーである。例えば、図3に示す矢印Rの方向(矢印Rと逆方向でも良い)に回転操作板70を自転させることにより、その自転の際に任意の方位にて、その裏方向に配置される多方向操作板60と揺動部材30をPCB20の方向に押圧することができる。回転操作板70は、好適には硬質樹脂あるいはエラストマーから構成される。回転操作板70の略中央にある穴(後述する)は、中央キー50の外径よりもわずかに大きく、かつ多方向操作板60の略中央の穴よりも小さく形成されている。回転操作板70の裏面から内方には、その周方向に沿うように、内方へと窪む凹部71が形成されている。その凹部71は、多方向操作板60側に開口し、外側面を略垂直に、内底面を水平に、内側面を内方天面の途中まで略垂直にしつつ当該内方天面近傍を回転操作板70の径方向内側に向かって窪ませた形状を有する。このため、凹部71の開口面の内側には、回転操作板70の径方向外側に向かって突出するツメ部72が存在する。凹部71のツメ部72の内方に形成された窪みは、多方向操作板60の内方突出部62と嵌め込み可能な大きさに形成されている。
【0029】
回転操作板70の表側の面は、その径方向外側から内側に向かって下方傾斜する傾斜面73となっている。ただし、傾斜面73を、水平面あるいは外側に向かって下方傾斜する面にしても良い。
【0030】
摩擦低減部材80は、多方向操作板60の表側の面と、回転操作板70の凹部71の内方天面との間に配置される略円板状のシートである。摩擦低減部材80は、好適には、フッ素系樹脂、特に、ポリテトラフルオロエチレンから成る。また、摩擦低減部材80は、多方向操作板60の表側の面に接着等により固定されるようにするのが好ましい。この結果、多方向操作板60と相対的に回転する回転操作板70が、摩擦低減部材80上をすべるように回転することができる。ただし、摩擦低減部材80を凹部71の内方天面に接着等により固定しても良い。また、摩擦低減部材80は、多方向操作板60の表側の面のみならず、回転操作板70の凹部71と接する可能性のある他の面に配置することもできる。
【0031】
枠体90は、好適には、金属あるいは硬質樹脂から構成される。枠体90は、その径方向内側にある表側の面93、当該表側の面93よりも径方向外側にあって、皿状体10の内底面側に一段下がった段差面94を有する。枠体90の中央には、表裏方向に貫通する穴95が形成されている。穴95は、PCB20、揺動部材30、多方向操作板60および回転操作板70を、それらの側面から囲うための領域である。穴95は、表裏方向に3段階に径を変えて形成されている。穴95の底部開口部近傍は、最も大径に形成されており、主に、PCB20および揺動部材30の円環状部材31が配置される領域である。穴95の中段領域は、上述の底部開口部近傍から一段内側へと小径に形成されており、主に、揺動部材30のドーム32、円板33、多方向操作板60の外方突出部61が配置される領域である。特に、中段領域は、外方突出部61が表裏方向および径方向外側にて穴95の内壁に接触しないように十分な大きさに形成されている。穴95の表方向の開口部近傍は、表側の面93から面一で径方向内側に延出する内方突出部92によって、中段領域よりも小径に形成されており、主に、回転操作板70が配置される領域である。また、枠体90の外側には、固定部位96が形成されており、皿状体10と枠体90を固定できるようになっている。この実施の形態では、固定部位96は、枠体90側に収納および枠体90の径方向外側に突出できる突起であり、皿状体10の側面に形成されるスリット(不図示)を貫通可能なものであるが、皿状体10と枠体90とを固定できる部材であれば、これに限定されない。
【0032】
図4は、多方向スイッチ部材の主要部を表裏方向に分解した分解図である。なお、図4では、皿状体10と枠体90を除外している。
【0033】
多方向操作板60の略中央の穴の内周面には、回転操作板70の凹部71に嵌め込まれる内方突出部62が形成されている。この結果、その穴の内周面には段差が形成され、略中央の穴は、揺動部材30から回転操作板70に向かって、大径な穴63と、小径な穴64とが連続する形態となっている。また、回転操作板70の略中央の穴の内周面にも段差が形成されており、当該略中央の穴は、多方向操作板60から表方向に向かって、大径な穴76と、小径な穴77とが連続する形態となっている。
【0034】
摩擦低減部材80は、多方向操作板60の表側の面に接着にて固定される。摩擦低減部材80を固定した多方向操作板60の表側の面には、回転操作板70が取り付けられる。この取り付けの際に、多方向操作板60の内方突出部62は、回転操作板70の凹部71の開口部にあるツメ部72に接触するが、その接触する部分の長さが短いため、内方突出部62あるいは/およびツメ部72が多少変形し、内方突出部62がツメ部72を通過し凹部71内に入る。
【0035】
中央キー50は、接着等により揺動部材30の台座39に固定される。PCB20は、揺動部材30の円環状部材31と接着等により固定される。PCB20に揺動部材30を固定した状態では、押圧子34,36,38等がメタルドーム24a,26a,28a等をへこませないようになっている。また、多方向操作板60の裏面と、揺動部材30を構成している円板33の表側の面とは、接着および/またはねじ止めにて固定される。中央キー50のフランジ部51は、回転操作板70の穴77には挿入できないようになっており、中央キー50は、その天面からの押圧およびその解除により、穴76より裏方向の領域で可動となっている。
【0036】
図5は、多方向スイッチ部材の揺動部材を裏返した状態を示す図である。
【0037】
揺動部材30の裏面の略中央には、1個の押圧子38が設けられている。また、その中央から径方向外側であってドーム32の近傍には、円板33の周方向に沿って等間隔(中心角:略90度)で、押圧子34,35,36,37が設けられている。押圧子34,35,36,37,38は、円板33に対して別体で固定されているが、円板33と同じ材料で一体的に形成されていても良い。押圧子34,35,36,37より径方向内側の領域には、円板33の周方向に沿って等間隔(中心角:45度)で、導電性弾性体41,42,43,44,45,46,47,48が設けられている。導電性弾性体41,42,43,44,45,46,47,48は、円板33に対して別体で固定されている。導電性弾性体41,42,43,44,45,46,47,48は、PCB20の表側の面に形成されている接点電極群に接する必要から、当該接点電極群よりも突出するメタルドーム24a,26a,28aに接する押圧子34,36,38等に比べて、それらの先端がPCB20の表側の面に近くなるように設けられている。
【0038】
図6は、多方向スイッチ部材のPCBを表向きにした状態を示す図である。
【0039】
PCB20の表側の面には、複数の接点電極群を含むプリント配線100が形成されている。プリント配線100において、各導電性弾性体41,42,43,44,45,46,47,48の直下にそれぞれ対応する位置には、接点電極群101,102,103,104,105,106,107,108が互いに独立して形成されている。接点電極群101は、多くの歯を有する電極(以後、櫛歯電極)101aおよび101bを、互いに隣接する歯を交差させるようにして非接触状態で配置した電極群である。接点電極群102〜108も、同様に、それぞれ、櫛歯電極102a,102b、櫛歯電極103a,103b、櫛歯電極104a,104b、櫛歯電極105a,105b、櫛歯電極106a,106b、櫛歯電極107a,107bおよび櫛歯電極108a,108bから構成される。接点電極群101,102,103,104,105,106,107,108は、それぞれ、揺動部材30に設けられる導電性弾性体41,42,43,44,45,46,47,48の接触によって導通可能になる。ただし、揺動部材30の上から押圧していない状態において、各導電性弾性体41,42,43,44,45,46,47,48が各接点電極群101,102,103,104,105,106,107,108とわずかに接触して導通状態にあり、揺動部材30の上からの押圧によって導電性弾性体41等と接点電極群101等との接触面積が増大し、接点電極群101等を構成する櫛歯電極101a,101b等の間の電気抵抗値がより低くなるようにしても良い。
【0040】
このように、各導電性弾性体41,42,43,44,45,46,47,48と各接点電極群101,102,103,104,105,106,107,108とが最初から接触しているか否かにかかわらず、各導電性弾性体41,42,43,44,45,46,47,48から各接点電極群101,102,103,104,105,106,107,108に加える押圧が大きくなると、各接点電極群101,102,103,104,105,106,107,108に接触する各導電性弾性体41,42,43,44,45,46,47,48の面積が大きくなる。その結果、各櫛歯電極101a,101b等の間の電気抵抗値が小さくなる。すなわち、各導電性弾性体41,42,43,44,45,46,47,48は、各接点電極群101,102,103,104,105,106,107,108を構成している各櫛歯電極101a,101b等の間の電気抵抗値を変えることができる可変抵抗機能を発揮する。
【0041】
PCB20の表側の面における各接点電極群101,102,103,104,105,106,107,108よりも径方向外側であって、各押圧子34,35,36,37と対向する位置には、それぞれ、1個のドーム型スイッチ24,25,26,27が配置されている。また、押圧子38と対向する位置には、1個のドーム型スイッチ28が配置されている。回転操作板70の表面の外周部位あるいは中央キー50をPCB20に向けて押圧すると、その押圧した位置に相当するメタルドーム24a,25a,26a,27a,28aをへこませることができる。その結果、メタルドーム24a,25a,26a,27a,28aの各中央部分がその直下にあるドット状の電極に接触し、メタルドーム24a,25a,26a,27a,28aと常時接続されているリング状の電極とドット状の電極とが電気的に接続され、スイッチがオンになる。メタルドーム24a,25a,26a,27a,28aをへこませてスイッチをオンにするために必要な押圧の方が、導電性弾性体41,42,43,44,45,46,47,48が接点電極群101,102,103,104,105,106,107,108に接触して電圧値がある閾値を通過してスイッチがオンになるために必要な押圧に比べて大きくなるように、メタルドーム24a,25a,26a,27a,28aの材質、形状等を決めるのが好ましい。
【0042】
この実施の形態では、接点電極群101,102,103,104,105,106,107,108は、互いに独立した電極群である。接点電極群は、8個に限定されず、4個あるいはその他の数であっても良い。ただし、図6に示すように、ドーム型スイッチを互いに直交するラインの両端方向に4個設けるような場合には、接点電極群および導電性弾性体をともに8個とする方が、操作方向をより正確に検知することができる。理由は、次の通りである。導電性弾性体41,42,43,44,45,46,47,48の先端が球面の場合には、特に低荷重時の方向検出が不安定になる可能性がある。それは、メタルドーム24a等に近い導電性弾性体41等が接点電極群101等に接触する時に、押圧子34等がメタルドーム24a等に乗り上がるので、わずかに導電性弾性体41等が浮くためである。導電性弾性体と接点電極群とがともに4個の場合よりも、ともに8個とする方が、導電性弾性体41等の一部がわずかに浮いても、それに隣接する導電性弾性体42,43等がサポートしてくれる。この結果、操作方向の誤検知の確率が低くなる。
【0043】
<2.制御部の概略構成>
図7は、図1に示す携帯電話の本体に備えられる制御部の例示的なハードウェアの構成図である。
【0044】
制御部110は、中央処理装置(CPU)111と、読み出し専用のメモリ(ROM)112と、読み書き可能なメモリ(RAM)113と、ビデオRAM(VRAM)114と、電気若しくは電圧の操作でデータの消去若しくは書き換えを可能としたメモリ(EEPROM)115と、インターフェイス(I/F)116とを備える。制御部110は、多方向スイッチ部材2のPCB20上あるいはPCB20以外に設けることができる。
【0045】
ROM112は、CPU111の制御用プログラム等の読み出し専用の情報を格納したメモリである。RAM113は、オペレーションシステム(OS)、各種アプリケーションソフト、この実施の形態における押圧操作方向の決定を行うために必要なコンピュータプログラム等を格納した、読み書き可能なメモリである。
【0046】
コンピュータプログラムは、外部のネットワークを経由して携帯電話1にインストールされ、あるいは情報記録媒体を携帯電話1内のスロット(図示せず)に装填することにより制御部110内のRAM113若しくはEEPROM115に格納されるようにしても良い。
【0047】
VRAM114は、種々のデータを表示部3に表示する際に、そのデータを一時的にストックしておくメモリである。EEPROM115も、一時的にデータを書き込んでおくメモリである。インターフェイス116は、制御部110の外部からの信号を受信あるいはその外部に信号を送信する部分である。ここで、「制御部110の外部」には、「携帯電話1の外部」も含まれる。
【0048】
CPU111は、各導電性弾性体41,42,43,44,45,46,47,48と接点電極群101,102,103,104,105,106,107,108との接触面積により変化する電圧を変換した信号の大きさに応じてベクトルを生成し、各ベクトルの合成により操作方向を検出することができる。CPU111は、上記ベクトルを生成するベクトル生成部と、生成した各ベクトルを合成して操作方向を検出する操作方向検出部とを兼ねる。
【0049】
また、CPU111は、上記の各ベクトルの生成に先立ち、各接点電極群101,102,103,104,105,106,107,108における電圧を、メモリ内の式を用いて信号に変換する信号変換部およびその変換した信号をメモリ内の別の式を用いて正規化する正規化処理部である。ここで、正規化処理は、各信号間の大きさのバラツキの影響を低減させるための処理である。好適には、CPU111は、正規化処理部として、接点電極群101,102,103,104,105,106,107,108ごとに、各接点電極群101,102,103,104,105,106,107,108の所定期間内における信号の検出幅に対する、各接点電極群101,102,103,104,105,106,107,108における信号の相対的な割合を用いて正規化処理を行うことができる。正規化処理は、必須の処理ではなく、より好ましい実施の形態における任意の処理であるが、導電性弾性体41,42,43,44,45,46,47,48間の抵抗値のバラツキあるいは抵抗値の経時変化を考慮すると、正確な操作方向を検出するために好適な処理である。
【0050】
メモリであるROM112、RAM113およびEEPROM115の内の少なくとも1つには、各導電性弾性体41等が各接点電極群101等と接触した際の櫛歯電極101a,101b等の間の電圧を信号に変換するための式(信号変換の式)および当該信号を正規化するための式(正規化の式)が格納されている。信号変換の式としては、例えば、y=−ax+b(y:信号(y>0)、x:電圧(x>0)、aおよびb:正数)、あるいはy=a/x(y:信号(y>0)、x:電圧(x>0)、a:正数)のように、導電性弾性体41等が接点電極群101等に接触する面積が大きくなり櫛歯電極101a,101b間の電圧が小さくなると信号が大きくなるようにする式が好ましい。正規化の式については、後述する。
【0051】
図8は、各接点電極群における電圧を変換した信号を正規化するための回路を例示的に示すと共に、その正規化処理を説明するための図である。
【0052】
接点電極群101等は、前述のように、一種の可変抵抗機能を持つ。各櫛歯電極101a,101b等の間の電気抵抗値は、導電性弾性体41等の接触面積により変化する。PCB20は、抵抗R1と抵抗R2とを直列につなぐ回路を有する。抵抗R1は、可変抵抗117であり、実際には、接点電極群101等に相当する。抵抗R2は、固定の抵抗値を持つ抵抗118である。接点電極群101の電圧(VOut)は、A/D変換器119にてデジタル値に変換される。CPU111は、メモリの一例であるRAM113内のコンピュータプログラムを読み、信号変換部として、先に説明した信号変換の式を用いて上記デジタル値を信号に変換し、さらに、正規化処理部として、当該コンピュータプログラム中の正規化の式(下記の数式)を用いて当該信号を正規化する。CPU111は、接点電極群101以外の他の接点電極群102〜108についても、上記と同様に信号の正規化処理を行う。
【0053】
【数1】
【0054】
上記数式中、Signal[1−8](Normalized)は、各接点電極群101,102,103,104,105,106,107,108における正規化処理後の信号を意味する。Signal[1−8](Maximum)およびSignal[1−8](Minimum)は、それぞれ、メモリ内に記憶されている信号の中の最大値および最小値を意味する。当該最大値および最小値は、導電性弾性体41等が押圧によりつぶれる過程で変化する抵抗に基づき生成される多くの信号の中で最大および最小の各値であって、RAM113やCPU111内の記憶部等のメモリに記録されている。ただし、信号は、メモリの空き容量が無くなると古い順に消去される。なお、メモリの容量オーバーではなく、所定期間(例えば、72時間)で、メモリ内の信号を古い順に消去するようにしても良い。Signal[1−8](input)は、導電性弾性体41等の接触を通じて検出された電圧値を変換した信号を意味する。Scale Magnitudeは係数(この実施の形態では、例えば、32)を意味する。
【0055】
例えば、接点電極群101において、メモリ内の信号の中の最大値(Signal[1](Maximum))および最小値(Signal[1](Minimum))が、それぞれ100および5であったとする。検出された電圧を変換した信号(Signal[1](input))は、15であり、係数(Scale Magnitude)が32に設定されているものとする。上記数式を用いると、正規化処理後の信号(Signal[1](Normalized))は、1+(15−5)×32/(100−5)=4.4となる。同様に、接点電極群102〜108についても、正規化処理後の各信号(Signal[2](Normalized)、Signal[3](Normalized)、Signal[4](Normalized)、Signal[5](Normalized)、Signal[6](Normalized)、Signal[7](Normalized)およびSignal[8](Normalized))を計算することができる。
【0056】
<3.操作方向の特定方法>
図9は、多方向検出装置において操作方向を特定するまでの概略的な処理の流れを示すフローチャートである。
【0057】
揺動部材30を押圧して導電性弾性体41,42,43,44,45,46,47,48の内の1以上を接点電極群101,102,103,104,105,106,107,108の1以上に接触させると、CPU111は、電圧検出部として、A/D変換器119を経由して、各接点電極群101,102,103,104,105,106,107,108における電圧値を検出する(ステップST1)。次に、CPU111は、RAM113内の所定のコンピュータプログラムを読み、信号変換部として、信号変換の式を用いて各接点電極群101,102,103,104,105,106,107,108における各電圧値から各信号への変換を行う(ステップST2)。次に、CPU111は、正規化処理部として、正規化の式を用いて、上記各信号の正規化処理を行う(ステップST3)。次に、CPU111は、ベクトル生成部として、電圧値の検出に関わる接点電極群101,102,103,104,105,106,107,108ごとに、正規化処理後の信号を利用してベクトルを生成する(ステップST4)。次に、CPU111は、第一操作方向検出部として、互いに反対方向のベクトルの差し引きを行う(ステップST5)。次に、CPU111は、第二操作方向検出部として、上記差し引き後のベクトルに対して、各接点電極群101,102,103,104,105,106,107,108の所定方向(「X軸方向」とする)およびこれと直交する方向(「Y軸方向」とする)の各ベクトルへの合成を行う(ステップST6)。次に、CPU111は、第三操作方向検出部として、1つの方向へのベクトル合成を行い、操作方向を特定する(ステップST7)。
【0058】
なお、上記の各ステップの内、ステップST5〜ST7を、1つのベクトルに合成する1つのステップのみとし、CPU111が操作方向検出部として当該1つのステップを実行するようにしても良い。
【0059】
図10は、多方向検出装置におけるPCB上の8個の接点電極群に導電性弾性体を接触させたときの状態を例示的に示す図である。図11、図12、図13および図14は、図10に示す押圧状態において、各ベクトルの生成からベクトルの第一次〜第三次合成までの各処理を図示したものである。
【0060】
操作者が回転操作板70上のある箇所を押圧した際に、図10に示すように、各導電性弾性体41,42,43,44,45,46,47,48が各接点電極群101,102,103,104,105,106,107,108と、それぞれ接触部121,122,123,124,125,126,127,128にて接触した例にて、操作方向を特定する処理を説明する。便宜上、接点電極群102と接点電極群106とを結ぶ軸をX軸、接点電極群104と接点電極群108とを結ぶ軸をY軸とする。
【0061】
図11に示すように、各接触部121,122,123,124,125,126,127,128の面積に応じて、それぞれ、ベクトルa,b,c,d,e,f,g,hが生成される。これらのベクトルa,b,c,d,e,f,g,hは、上述のように正規化の式を経た信号から生成されているので、ベクトルの正規化レンジの範囲内にある。例えば、上記の正規化のための式中のScale Magnitudeを32とすると、正規化後の信号は、半径が33の正規化レンジの範囲内にある。ベクトルa,b,c,d,e,f,g,hの生成後、互いに反対方向の2つのベクトルにつき差し引きを行うと、図12に示すように、ベクトルaa,bb,cc,hhの4つのベクトルに合成できる。次に、各ベクトルをX軸成分とY軸成分に分けて、X軸方向およびY軸方向のベクトルに合成すると、図13に示すように、2つのベクトルbbb,hhhが生成できる。最後に、ベクトルbbbとベクトルhhhを合成すると、図14に示すように、1つのベクトルPが合成できる。この結果、操作方向および押圧力は、ベクトルPにより特定されることになる。
【0062】
<4.その他の実施の形態>
本発明の好適な実施の形態について説明したが、本発明は、次のように、種々変形を施して実施することもできる。
【0063】
導電性弾性体41等以外に、押圧によって接触する接点電極群101等の電圧値を変化させる導電体を用いてもよい。例えば、接点電極群101等に押し付けられると形状を変化する金属製の導電体を用いても良い。また、導電性弾性体41等の先端を平面(好ましくは、接点電極群101等の面と平行な面)としても良い。さらに、導電性弾性体41等を押圧していない状態で、導電性弾性体41等と接点電極群101等とを接触させて接点電極群101等に所定の電圧をかけておき、導電性弾性体41等への押圧が強くなるに従って、導電性弾性体41等と接点電極群101等との接触面積が大きくなり、それに伴い接点電極群101等の電圧が変化するようにしても良い。また、ベクトルの生成は、電圧値ではなく、電気抵抗値から変換した信号に基づいて行われても良い。
【0064】
導電体は、複数ではなく一つにし、複数の接点電極群101等に1または2以上の箇所で接触させるようにしても良い。ドーム型スイッチ24等は、必ずしも設けなくても良い。また、ドーム型スイッチ24等をPCB20上の接点電極群101等の内側に設けても良い。接点電極群101等を互いに独立して形成せず、複数の接点電極群101等を接続して1つの電極集合体を形成しても良い。例えば、8個の接点電極群101等から、4個の電極集合体を形成しても良い。
【0065】
前述の実施の形態における例示的な正規化の式中の「+1」の部分は無くても良い。ただし、ベクトルの大きさがゼロに近くなるのを防止するために、正規化の式を、上記のような「+1」、あるいは「+2」等の正数を加えた形の式にするのが好ましい。また、正規化処理に用いる信号は、接点電極群101等の電圧値を信号変換の式を用いて変換したものであるが、信号変換の式を用いることなく、当該電圧値あるいは電気抵抗値であっても良い。また、正規化処理を行う際に、信号の最大値と最小値を用いたが、最大値と最小値を用いる場合に限定されず、例えば2番目に大きな信号値と2番目に小さな信号値を用いても良い。
【産業上の利用可能性】
【0066】
本発明は、例えば、携帯電話、車載用のナビゲーション装置、携帯用薄型PC、音楽再生用携帯機器、あるいはそれらの機器を操作するためのリモートコントローラーなどに利用することができる。
【符号の説明】
【0067】
1 携帯電話(多方向検出装置)
20 PCB(印刷回路基板)
24,25,26,27,28 ドーム型スイッチ
30 揺動部材
41,42,43,44,45,46,47,48 導電性弾性体(導電体)
101,102,103,104,105,106,107,108 接点電極群
110 制御部
111 CPU(ベクトル生成部、操作方向検出部、正規化処理部)
112 ROM(メモリ)
113 RAM(メモリ)
115 EEPROM(メモリ)
【特許請求の範囲】
【請求項1】
その中央から径方向外側に向かう複数方向の各位置において、裏側に向かって押圧操作できる揺動部材と、
当該揺動部材の裏側に対向配置され、当該揺動部材上の上記各位置における裏側への押圧を受けて、押圧操作されたことを検出するための印刷回路基板と、
上記押圧操作を検出する制御部と
を備え、
上記揺動部材は、その裏側において、上記印刷回路基板側に突出する1または複数の導電体を備え、
上記印刷回路基板は、上記揺動部材からの押圧を受けて上記導電体との接触面積に応じて抵抗が変わる複数の接点電極群を備え、
上記制御部は、
上記導電体と上記複数の接点電極群との接触面積により変化する電気抵抗値若しくは電圧値に基づいてベクトルを生成するベクトル生成部と、
各ベクトルの合成により操作方向を検出する操作方向検出部と、
を含むことを特徴とする多方向検出装置。
【請求項2】
前記導電体は、前記揺動部材の周方向に複数配置され、
前記接点電極群は、前記印刷回路基板上において、個々の前記導電体と対向して複数配置されていることを特徴とする請求項1に記載の多方向検出装置。
【請求項3】
前記印刷回路基板の前記接点電極群を配置している面において、前記複数の前記接点電極群を結ぶ円の中心から前記接点電極群より外側に、1または2以上のドーム型スイッチを備え、
前記複数の接点電極群は、互いに独立して形成されていることを特徴とする請求項1または請求項2に記載の多方向検出装置。
【請求項4】
前記制御部は、前記各ベクトルの合成に先立ち、前記各接点電極群における電気抵抗値若しくは電圧値に基づく信号に対して、メモリ内の式を用いて、各信号間の大きさのバラツキの影響を低減させるための正規化処理を行う正規化処理部を含むことを特徴とする請求項1から請求項3のいずれか1項に記載の多方向検出装置。
【請求項5】
前記正規化処理部は、前記接点電極群ごとに、各接点電極群の所定期間内における前記電気抵抗値若しくは前記電圧値に基づく信号の検出幅に対する、各接点電極群において検出された前記電気抵抗値若しくは前記電圧値に基づく信号の相対的な割合を用いて、前記正規化処理を行うことを特徴とする請求項4に記載の多方向検出装置。
【請求項1】
その中央から径方向外側に向かう複数方向の各位置において、裏側に向かって押圧操作できる揺動部材と、
当該揺動部材の裏側に対向配置され、当該揺動部材上の上記各位置における裏側への押圧を受けて、押圧操作されたことを検出するための印刷回路基板と、
上記押圧操作を検出する制御部と
を備え、
上記揺動部材は、その裏側において、上記印刷回路基板側に突出する1または複数の導電体を備え、
上記印刷回路基板は、上記揺動部材からの押圧を受けて上記導電体との接触面積に応じて抵抗が変わる複数の接点電極群を備え、
上記制御部は、
上記導電体と上記複数の接点電極群との接触面積により変化する電気抵抗値若しくは電圧値に基づいてベクトルを生成するベクトル生成部と、
各ベクトルの合成により操作方向を検出する操作方向検出部と、
を含むことを特徴とする多方向検出装置。
【請求項2】
前記導電体は、前記揺動部材の周方向に複数配置され、
前記接点電極群は、前記印刷回路基板上において、個々の前記導電体と対向して複数配置されていることを特徴とする請求項1に記載の多方向検出装置。
【請求項3】
前記印刷回路基板の前記接点電極群を配置している面において、前記複数の前記接点電極群を結ぶ円の中心から前記接点電極群より外側に、1または2以上のドーム型スイッチを備え、
前記複数の接点電極群は、互いに独立して形成されていることを特徴とする請求項1または請求項2に記載の多方向検出装置。
【請求項4】
前記制御部は、前記各ベクトルの合成に先立ち、前記各接点電極群における電気抵抗値若しくは電圧値に基づく信号に対して、メモリ内の式を用いて、各信号間の大きさのバラツキの影響を低減させるための正規化処理を行う正規化処理部を含むことを特徴とする請求項1から請求項3のいずれか1項に記載の多方向検出装置。
【請求項5】
前記正規化処理部は、前記接点電極群ごとに、各接点電極群の所定期間内における前記電気抵抗値若しくは前記電圧値に基づく信号の検出幅に対する、各接点電極群において検出された前記電気抵抗値若しくは前記電圧値に基づく信号の相対的な割合を用いて、前記正規化処理を行うことを特徴とする請求項4に記載の多方向検出装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2011−145750(P2011−145750A)
【公開日】平成23年7月28日(2011.7.28)
【国際特許分類】
【出願番号】特願2010−3897(P2010−3897)
【出願日】平成22年1月12日(2010.1.12)
【出願人】(000190116)信越ポリマー株式会社 (1,394)
【Fターム(参考)】
【公開日】平成23年7月28日(2011.7.28)
【国際特許分類】
【出願日】平成22年1月12日(2010.1.12)
【出願人】(000190116)信越ポリマー株式会社 (1,394)
【Fターム(参考)】
[ Back to top ]