
多方活栓切換フローシステム
【課題】
流体の正確で安定した供給および切り換え、ならびに低コストにてコンタミネーションを防止可能な多方活栓切換フローシステムを提供する。
【解決手段】
流体15を内部に充填し外部にその流体15を排出可能な複数の容器10と、複数の容器10から送られる流体15のフロー方向を複数パターンに切り換え可能な多方活栓42を着脱可能に取り付けた1または複数の多方活栓切換装置40と、容器10内の流体15を多方活栓42に向けて送る方向および当該方向と逆方向の内、少なくとも一方向に流体15を送るための第一駆動源20と、多方活栓42のフロー方向を切り換えるための第二駆動源43と、第一駆動源20および第二駆動源43の駆動を制御する制御装置50とを備える多方活栓切換フローシステム1とする。
流体の正確で安定した供給および切り換え、ならびに低コストにてコンタミネーションを防止可能な多方活栓切換フローシステムを提供する。
【解決手段】
流体15を内部に充填し外部にその流体15を排出可能な複数の容器10と、複数の容器10から送られる流体15のフロー方向を複数パターンに切り換え可能な多方活栓42を着脱可能に取り付けた1または複数の多方活栓切換装置40と、容器10内の流体15を多方活栓42に向けて送る方向および当該方向と逆方向の内、少なくとも一方向に流体15を送るための第一駆動源20と、多方活栓42のフロー方向を切り換えるための第二駆動源43と、第一駆動源20および第二駆動源43の駆動を制御する制御装置50とを備える多方活栓切換フローシステム1とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数の流体のフロー方向を制御する多方活栓切換フローシステムに関する。
【背景技術】
【0002】
近年、人体への薬液投与、薬剤の製造、分析等において正確な流体の供給が要求されている。例えば、人体の血管内に、鎮痛剤、インシュリン製剤、抗生物質あるいは抗癌剤等を供給する場合には、その量が少なすぎると効果が小さく、多すぎると、鎮痛剤の場合には肝機能障害、インシュリン製剤の場合には急激な血糖値の低下による意識低下、抗生物質の場合には耐性菌の増殖、抗癌剤の場合には副作用による臓器不全などの様々な弊害が生じ得る。このため、所定の時間をかけて人体に薬剤を投与する際には、薬剤を正確な流速にて供給するための流量調整装置が用いられる(例えば、特許文献1参照)。
【0003】
一方、薬剤の製造現場においては、その製造に必要な流体を特に正確に供給することが求められている。その一例として、プラスミノーゲンの製造を挙げる。プラスミノーゲンは、ヒト血漿中に含まれる一本鎖糖蛋白質であり、プラスミノーゲンアクチベータ(ウロキナーゼ(u-PA)および組織プラスミノーゲンアクチベータ(t-PA))によって活性化されると、プラスミンになる。プラスミンは、フィブリンを溶解する作用を持つことから、有効な血栓溶解剤として知られている。このようなプラスミンの前駆体であるプラスミノーゲンをヒト血漿中から分離・取得するための一つの手法として、ヒトの血液若しくは血漿を特定のポリマーあるいはモノクロナール抗体を含む吸着カラムに通してプラスミノーゲンを吸着させ、その後に特定の脱着剤を吸着カラムに通して、プラスミノーゲンと結合することにより吸着カラムから離脱させる方法が知られている(例えば、特許文献2および特許文献3を参照)。
【0004】
さらに、分析の現場においても、正確かつ高効率の分析を行うには、用いる試薬あるいは分析対象のサンプルを正確に供給することが求められる。
【特許文献1】特開2001−104479号公報
【特許文献2】特表2008−511546号公報
【特許文献3】特開平10−179159号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかし、上記従来からの人体への薬剤の投与、薬剤の製造および分析には、次のような解決すべき問題がある。いずれの従来技術の場合も、人のマニュアル操作によって薬剤等の流体の供給量(あるいは供給速度)の調整を行っているため、その供給量(あるいは供給速度)の正確性に欠ける。また、流路を切り換える必要が生じた際にマニュアルにて操作するので、流路の瞬時あるいは確実な切り換えが困難である。ここで、電磁バルブあるいはエアーバルブ等を採用して確実かつ瞬時に流路の切り換えを行うことも考えられるが、切り換え時の振動が大きく、流体の供給の安定化の妨げになりやすい。また、かかる種類のバルブを用いると、バルブ内での流体の残留に伴うコンタミネーションの危険性がある。加えて、流体の当該コンタミネーションを避けるために、電磁バルブやエアーバルブを使い捨てにすると、装置の高コスト化を招く。
【0006】
本発明は、かかる問題を解決するためになされたものであって、流体の正確で安定した供給および切り換え、ならびに低コストにてコンタミネーションを防止可能な多方活栓切換フローシステムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明者らは、上記課題を解決すべく鋭意研究開発を行ってきた結果、手動操作可能な多方活栓を着脱自在に組み込み、その手動ノブを電動にて回動できる多方活栓切換装置と、複数の容器内から上記の多方活栓に向けて流体を送るための駆動源と、多方活栓の切り換えと流体のフロー動作とを制御する制御装置とを備えたシステムを完成した。具体的なシステムは、以下の通りである。
【0008】
本発明の一つの形態は、複数の流体のフロー方向を制御するシステムであって、流体を内部に充填し、外部にその流体を排出可能な複数の容器と、上記複数の容器から送られる上記流体のフロー方向を複数パターンに切り換え可能な多方活栓を着脱可能に取り付けた1または複数の多方活栓切換装置と、上記容器内の流体を上記多方活栓に向けて送る方向および当該方向と逆方向の内、少なくとも一方向に上記流体を送るための第一駆動源と、上記多方活栓のフロー方向を切り換えるための第二駆動源と、上記第一駆動源および上記第二駆動源の駆動を制御する制御装置とを備える多方活栓切換フローシステムである。
【0009】
また、本発明の別の形態は、前記容器から前記流体を送る下流側の経路中に、前記容器内の前記流体の構成要素を吸着させる吸着カラムを配置している多方活栓切換フローシステムである。
【0010】
また、本発明の別の形態は、前記複数の容器から前記多方活栓装置までの経路を、各容器内の前記流体を合流して前記多方活栓に送るように構成している多方活栓切換フローシステムである。
【0011】
また、本発明の別の形態は、前記第一駆動源が正逆両方向に前記流体を送るように駆動可能であって、少なくとも1つの前記容器内の前記流体を前記容器内に戻す方向から前記多方活栓に向けて送る方向に、前記第一駆動源の駆動方向を切り換えた直後に、前記制御装置は、前記第一駆動源の駆動動作と前記容器内の前記流体を送る動作とが正確に応答できる分あるいはそれ以上、前記流体を当該送る方向に移動させる向きに前記第一駆動源を駆動する多方活栓切換フローシステムである。
【0012】
また、本発明の別の形態は、前記流体を液体として、前記制御装置が少なくとも1つの前記容器の下流側に存在する気体を前記容器内に戻すために、前記第一駆動源を前記逆方向に駆動する多方活栓切換フローシステムである。
【0013】
また、本発明の別の形態は、前記複数の容器が生理食塩水を入れた第一容器、血液若しくは血漿を入れた第二容器、上記血液若しくは上記血漿中の特定の成分と結合可能な溶液を入れた第三容器を含み、前記第一駆動源が上記第一容器、上記第二容器および上記第三容器内の各液体を、前記多方活栓に送る方向および当該送る方向と逆方向の双方向に送ることができるように個別に駆動可能であって、前記吸着カラムが上記特定の成分を吸着可能なカラムであって、前記制御装置が上記第一容器から上記生理食塩水を前記多方活栓に向けて送り、その後、上記第二容器から上記血液若しくは上記血漿を前記多方活栓に向けて送り、その後、前記多方活栓を切り換え、その後、上記第三容器からその中の溶液を前記多方活栓に向けて送るように、前記第一駆動源の駆動を制御する多方活栓切換フローシステムである。
【0014】
ここで、「容器」とは、流体をその内部に充填し、それを容器外に出すことができるものであれば、その形状あるいは材料を問わない。例えば、容器の材料として、ポリマー、エラストマー、金属等を用いても良い。また、容器の形態として、略定形的なシリンジ、ボンベ、缶の他、非定形的なバッグであっても良い。また、「流体」は、気体、液体を含むように広義に解釈される。
【0015】
「多方活栓」は、少なくとも二方向に切り換えて流体を送ることができるバルブであれば、三方向以上の切り換えパターンを有するものも含む。また、多方活栓は、使用後に容易に捨てることができる手動の多方活栓である。「多方活栓切換装置」は、上記多方活栓を着脱自在に組み込み可能であって、その流路切り換え部分(例えば、手動のノブ、ハンドル)を駆動する装置である。多方活栓切換装置は、本発明のシステムに1つあるいは2つ以上備えられていても良い。
【0016】
「チューブ」は、容器内の流体を多方活栓あるいはそれより下流側の経路において流体の流路となる管であれば、その形態あるいは材料を問わない。チューブ内部の穴断面が略円形の他、略多角形であっても良い。チューブの材料は、チューブが変形自在となるような樹脂等であっても、変形しにくい金属等であっても良い。チューブは、複数の容器から並列で個別の多方活栓に接続されていてもよく、あるいは複数の容器から一旦合流して多方活栓に接続されていても良い。なお、当該チューブは、このシステムにおいて必須の構成部材ではない。
【0017】
「第一駆動源」は、容器内の流体を多方活栓に向けて送る方向(正方向という)とその反対方向(逆方向という)の内、少なくともいずれか一方に当該流体を送るように駆動する装置をいい、例えば、遠心ポンプ、プロペラポンプ、粘性ポンプ等に代表される非容積式ポンプ、往復動ポンプおよび回転ポンプ等に代表される容積式ポンプなどの各種ポンプおよび必要に応じてその駆動伝達部を含む。また、第一駆動源は、DCモータ、DCサーボモータ、RCサーボモータ、単相交流モータ、ACサーボモータ、誘導モータ、ステッピングモータ、DDモータ等の各種モータおよび必要に応じてその駆動伝達部も含む。
【0018】
本発明の多方活栓切換フローシステムに配置される容器が略水平に静置される場合には、第一駆動源は、容器内の流体を正逆両方向に送るように駆動する装置であるのが好ましい。フロー対象の流体が液体である場合、シリンジの下流側の液体中に存在する気体を容器内に引き込むために、第一駆動源は、液体を本来のフロー方向とは逆の方向に送るように駆動することができる。これにより、気体をフロー方向に送るのを防ぐことができる。一方、容器が略垂直に立てるように配置され、液体が下方から排出される場合には、常時、重力によって液体を排出する向きに力がかかっているので、第一駆動源が正方向に液体を送るように駆動せずに、逆方向に液体を送るように駆動するだけの装置であっても良い。また、容器が略垂直に立てるように配置され、液体が上方から排出される場合には、常時、重力によって液体を排出しない方向に力がかかっているので、第一駆動源が逆方向に液体を送るように駆動せずに、正方向に液体を送るように駆動するだけの装置であっても良い。第一駆動源は、容器の数と同じ数だけ備えられ、容器内の液体の送り込みを個別に行うものでも良く、あるいは2以上の容器に共有の1個の第一駆動源を備えていても良い。
【0019】
「第一駆動源の駆動動作と容器内の流体を送る動作とが正確に応答できる分」とは、第一駆動源が駆動するとその駆動を無駄にせずにフロー動作を行うのに必要な駆動系の「遊び」の分を意味する。第一駆動源の駆動を切り換える際には、その切り換え直後の第一駆動源の駆動動作に対応して、すぐに流体のフロー動作が行われないことがある。これは、第一駆動源と容器におけるフローに必要な駆動部分との接続に、「遊び」が存在するからである。第一駆動源がこの「遊び」を解消するための動作を行ってから、フローに必要な駆動を実行すると、第一駆動源の駆動に対して正確な量の流体を送ることができる。「遊び」を確実に解消するために、「第一駆動源の駆動動作と容器内の流体を送る動作とが正確に応答できる分」を超える分、駆動することもできる。
【0020】
「第二駆動源」は、多方活栓の流路切り換え部分を駆動するものであって、ポンプ、モータおよび必要に応じてその駆動伝達部も含む。第二駆動源の数は、限定されるものではなく、1つあるいは2以上備えていても良い。また、多方活栓の数と同数あるいはそれより少ない数の第二駆動源を備えることができる。
【0021】
「制御装置」とは、第一駆動源および第二駆動源の駆動をコンピュータ等により制御する装置であれば、使用者の手動設定によって実行可能な装置であっても、使用者が設定した実行パターンをコンピュータプログラムにより記憶させ、その実行パターンにしたがってフロー動作を実行する装置であっても良い。
【0022】
「吸着カラム」は、複数の容器内の少なくとも一つの容器に入っている流体を構成する構成要素の一部を吸着可能な材料を含む吸着手段であれば、何でも採用できる。好適な例では、血液若しくは血漿中のプラスミノーゲンを吸着できる材料(特定のポリマーや抗体)を含むものである。
【発明の効果】
【0023】
本発明によれば、流体の正確で安定した供給および切り換え、ならびに低コストにてコンタミネーションを防止可能な多方活栓切換フローシステムを提供することができる。
【発明を実施するための最良の形態】
【0024】
次に、本発明の多方活栓切換フローシステムの実施の形態につき、説明する。
【0025】
1.システム構成
【0026】
(システム例1)
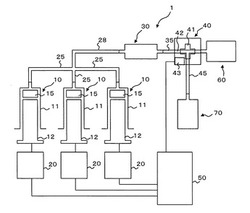
図1は、本発明の好適な実施の形態に係る多方活栓切換フローシステム1の一例を示す概略構成図である。
【0027】
多方活栓切換フローシステム1は、複数の流体15のフロー方向を制御するシステムであって、流体15を内部に充填し、外部にその流体15を排出可能な複数の容器10と、流体15のフロー方向を複数パターンに切り換え可能な1個の多方活栓42を着脱可能に取り付けた1個の多方活栓切換装置40と、各容器10内の流体15を多方活栓42に向けて送る方向(正方向)および当該正方向と逆方向に流体15を送るための複数の第一駆動源20と、多方活栓42のフロー方向を切り換えるための1個の第二駆動源43と、第一駆動源20および第二駆動源43の各駆動を制御する1個の制御装置50を備える。容器10は、ここでは、好適に、「シリンジ」を用いることができる。また、多方活栓42は、ここでは、好適に、「三方活栓」を用いることができる。
【0028】
第一駆動源20は、各容器10に1個ずつ用意され、制御装置50による制御の下、容器10内の流体15の送りと戻しの双方向に駆動する。第二駆動源43は、多方活栓切換装置40に組み込まれており、制御装置50による制御の下、多方活栓42の流路切換操作部41を回動する動作を行う。第一駆動源20および第二駆動源43は、ここでは、好適に、ステッピングモータを用いることができる。
【0029】
各容器10と多方活栓42との間には、チューブ25,28が配置される。各容器10のフロー方向下流側には、それぞれチューブ25が接続される。各チューブ25は、別の一本のチューブ28と接続される。多方活栓42の下流側には、容器60,70が接続される。容器70と多方活栓42とはチューブ45で接続される。例えば、一つの容器10から流体15を送り、多方活栓42を通って容器70に入れる動作を終了後、多方活栓42の流路を容器60の方向に切り換え、先の容器10とは別の容器10からの流体15を送り、容器60に入れるようにすることができる。
【0030】
各容器10と多方活栓42との間には、必要に応じて、流体15の構成要素を吸着させるための吸着カラム30を配置することができる。吸着カラム30の上流側は、チューブ28に接続される。吸着カラム30フロー方向下流側と多方活栓42のフロー方向上流側は、チューブ35にて接続される。ただし、吸着カラム30のフロー方向下流側を、直接、多方活栓42のフロー方向上流側に接続することにより、チューブ35を用いないようにしても良い。また、チューブ25,28を用いず、容器10の下流側と吸着カラム30の上流側とを直接、接続しても良い。また、チューブ28のみを省略し、各容器10に接続した各チューブ25を別々に吸着カラム30に接続しても良い。
【0031】
第一駆動源20は、正逆両方向に流体15を送るように駆動可能である場合において、少なくとも1つの容器10内の流体15をその容器10内に戻す方向から多方活栓42に向けて送る方向に第一駆動源20の駆動方向を切り換えた直後、制御装置50は、第一駆動源20の駆動動作と容器10内の流体15を送る動作とが正確に応答できる分あるいはそれ以上、流体15を当該送る方向に移動させる向きに第一駆動源20を駆動するようにしても良い。
【0032】
流体15に液体を用いた場合において、制御装置50は、少なくとも1つの容器10の下流側に接続されるチューブ25内の流体15中に存在する気体を容器10内に戻すために、第一駆動源20を逆方向に駆動するようにしても良い。
【0033】
(システム例2)
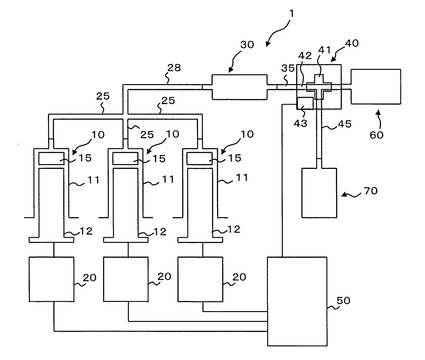
図2は、本発明の好適な実施の形態に係る多方活栓切換フローシステム1の別の例を示す概略構成図である。
【0034】
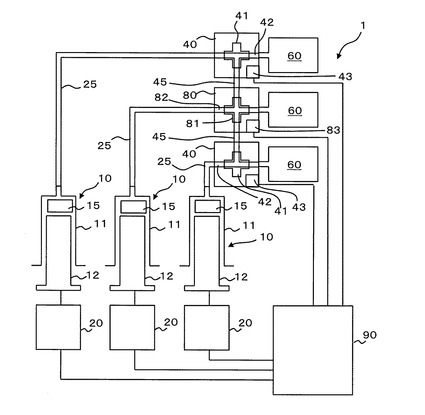
この多方活栓切換フローシステム1は、複数の流体15のフロー方向を制御するシステムであって、流体15を内部に充填し、外部にその流体15を排出可能な複数の容器10と、流体15のフロー方向を複数パターンに切り換え可能な1個の多方活栓42を着脱可能に取り付けた複数の多方活栓切換装置40と、流体15のフロー方向を複数パターンに切り換え可能な1個の多方活栓82を着脱可能に取り付けた1個の多方活栓切換装置80と、各容器10内の流体15を各多方活栓42に向けて送る方向(正方向)および当該正方向と逆方向に流体15を送るための複数の第一駆動源20と、各多方活栓42のフロー方向を切り換えるための複数の第二駆動源43と、多方活栓82のフロー方向を切り換えるための1個の第二駆動源83と、第一駆動源20および第二駆動源43,83の各駆動を制御する1個の制御装置90を備える。容器10は、ここでは、好適に、「シリンジ」を用いることができる。また、多方活栓42および多方活栓82は、好適に、それぞれ、「三方活栓」および「四方活栓」を用いることができる。
【0035】
図2に示す多方活栓切換フローシステム1において、図1に示す多方活栓切換フローシステム1と異なる主な点は、各容器10に個別に接続される多方活栓切換装置40,40,80を備える点と、三方活栓以外に四方活栓を採用している点と、吸着カラム30を備えていない点と、制御装置90が複数の第二駆動源43,43,83を制御している点と、多方活栓42,82に容器70を接続していない点である。
【0036】
第一駆動源20は、各容器10に1個ずつ用意され、制御装置90による制御の下、容器10内の流体15の送りと戻しの双方向に駆動する。第二駆動源43および第二駆動源83は、それぞれ、多方活栓切換装置40および多方活栓切換装置80に組み込まれており、制御装置90による制御の下、流路切換操作部41および流路切換操作部81をそれぞれ回動する動作を行う。第一駆動源20および第二駆動源43,83は、ここでは、好適に、ステッピングモータを用いることができる。
【0037】
各容器10と多方活栓42,82との間は、それぞれ、チューブ25にて接続されている。また、多方活栓42,82の下流側には、それぞれ1個の容器60が接続される。多方活栓42,82において、容器60およびチューブ25を接続していない残りの管路は、チューブ45にて接続されている。なお、多方活栓42,82をチューブ45で接続せずに、ルアーロック方式等によって、多方活栓42,82同士を直接に接続するようにしても良い。図2に示すように、多方活栓82は四方活栓であり、容器60およびチューブ25を接続していない管路は、2本存在する。当該2本の管路は、各多方活栓42の1本の管路に、チューブ25を介してそれぞれ接続される。なお、多方活栓42,82の使用していない管路の口が生じる場合、汚染防止の観点からその口をキャップ等によって塞ぐのが好ましい。
【0038】
このような構成の多方活栓切換フローシステム1を用いることにより、例えば、各容器10内の流体15を2種類および3種類混合しあるいは反応させて、その結果物(混合物または反応物)を容器60に収集することができる。この多方活栓切換フローシステム1では、容器10の数と多方活栓切換装置40,82の数を同一にする他、異なるようにしても良い。
【0039】
第一駆動源20は、正逆両方向に流体15を送るように駆動可能である場合において、少なくとも1つの容器10内の流体15をその容器10内に戻す方向から多方活栓42,82に向けて送る方向に第一駆動源20の駆動方向を切り換えた直後、制御装置90は、第一駆動源20の駆動動作と容器10内の流体15を送る動作とが正確に応答できる分あるいはそれ以上、流体15を当該送る方向に移動させる向きに第一駆動源20を駆動するようにしても良い。
【0040】
流体15に液体を用いた場合において、制御装置90は、少なくとも1つの容器10の下流側に接続されるチューブ25内の流体15中に存在する気体を容器10内に戻すために、第一駆動源20を逆方向に駆動するようにしても良い。一方、流体15に気体を用いた場合には、その拡散を防止するため、容器10はチューブ25を介さず、直接、多方活栓42,82に接続するのが好ましい。加えて、多方活栓42,82の下流側に種々のカラムを接続するようにしても良い。
【0041】
2.システムの応用例
以下、図3〜図8に基づいて、本発明の実施の形態に係る多方活栓切換フローシステム1の応用例を説明する。
【0042】
図3は、多方活栓切換フローシステム1の具体的な構成を示す平面図である。図4は、図3に示す多方活栓切換フローシステム1において、各シリンジから流体を送るあるいは戻す動作を行うための機構例を示す図である。
【0043】
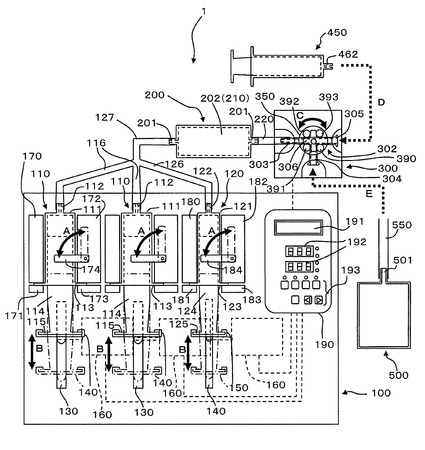
この多方活栓切換フローシステム1は、プラスミノーゲンを採取するのに応用したものであり、本体100と、吸着カラム200と、多方活栓切換装置300とを備えている。多方活栓切換装置300には、多方活栓の一例である三方活栓302が着脱可能に取り付けられる。三方活栓302において吸着カラム200と接続していない残りの2方向の管路には、それぞれ、多方活栓切換フローシステム1の構成外である採取用シリンジ450および廃液容器500を着脱可能に取り付けることができる。ここで、採取用シリンジ450に代えて、採取バイアルを採用することもできる。採取バイアルを用いる場合には、滅菌済みのバイアル瓶の口にゴム栓を付け、当該ゴム栓に刺した管を三方活栓302と接続するのが好ましい。採取用シリンジ450および廃液容器500の接続に関しては、後述する。以下、本体100、吸着カラム200、多方活栓切換装置300、採取用シリンジ450および廃液容器500について、その構成等を説明する。
【0044】
(1)本体
本体100は、容器の一例である2本のシリンジ(第一容器、第二容器)110,110および1本のシリンジ(第三容器)120、第一駆動源の一例である3個のステッピングモータ160,160,160および制御装置の一例である制御コントローラ190を備えている。シリンジ110,110内には、それぞれ、生理食塩水および血液(又は血漿)が入れられる。シリンジ120内には、トラネキサム酸が入れられる。ただし、これは、流体の一例にすぎず、他の流体を入れるようにしても良い。
【0045】
シリンジ110,110は、内部に空間を有する外筒体111,111と、その外筒体111,111の空間内に略密接するように挿入され、当該空間の容積を増減するように挿脱両方向に移動可能なピストン114,114とを備えている。外筒体111,111は、開口部と反対側の先端に、上記空間に連接する穴を有する突起部112,112を有する。また、外筒体111,111の開口部には、その開口部の径方向に広がるフランジ113,113を有する。ピストン114,114は、外筒体111,111と反対側の端部に、その端部の径方向に広がるフランジ115,115を備える。シリンジ120は、その径がシリンジ110の径より小さい点が異なるだけで、他の構造は、シリンジ110と同様である。シリンジ120は、先端に突起部122を有しその反対側にフランジ123を有する外筒体121と、外筒体121と反対側の端部にその端部の径方向に広がるフランジ125を有するピストン124を備えている。
【0046】
本体100における図面表方向の面(表面)には、2本のシリンジ110,110および1本のシリンジ120を固定する構成部を備えている。具体的には、以下の構成部が備えられている。本体の一方の角に寄った領域に、表面から突出する略直方体のブロック170,171,172,173が取り付けられている。ブロック170とブロック171とは、図面上下方向に隙間をあけて取り付けられている。また、ブロック172とブロック173も、図面上下方向にほぼ同じ隙間をあけて取り付けられている。また、ブロック170とブロック172、およびブロック171とブロック173は、それぞれ、シリンジ110の外筒体111の径よりわずかに大きな幅を離して配置されている。さらに、ブロック170とブロック171、およびブロック172とブロック173は、それぞれ、外筒体111のフランジ113の厚さよりわずかに大きな幅を離して配置されている。このため、シリンジ110の外筒体111をブロック170とブロック172の間に挿入し、外筒体111のフランジ113をブロック170とブロック171の間およびブロック172とブロック173の間に挿入することによって、シリンジ110を本体100に強く固定することができる。
【0047】
また、ブロック170とブロック172の本体100表面から突出する高さは、シリンジ110の径と同じ若しくはそれ以上の長さに設計されている。加えて、ブロック172の表面には、ブロック170方向に伸びるプレートであって、図中の矢印Aで示すようにブロック172を支点としてシリンジ110側に回動可能なプレート174を備えている。このため、シリンジ110をブロック170とブロック172の間に挿入した後、プレート174をシリンジ110側に回動することにより、シリンジ110をさらに確実に固定でき、シリンジ110の誤脱を低減することができる。
【0048】
上述のシリンジ110の図面右隣には、上述と同じタイプのシリンジ110をもう1本固定するためのブロック170、ブロック171、ブロック172、ブロック173およびプレート174が取り付けられているが、上記の構成と共通するので、その説明を省略し、図面からもその符号を省略する。
【0049】
さらにその右隣の領域には、シリンジ120を固定するためのブロック180,181,182,183が取り付けられている。プレート184は、ブロック182に回動可能に取り付けられている。ブロック180,181,182,183の形態は、上述のブロック170,171,172,173とそれぞれ同一の形態である。ブロック180とブロック182、およびブロック181とブロック183は、シリンジ120の外筒体121の径に合うような幅を離して配置されている。また、ブロック180とブロック181の間、およびブロック182とブロック183の間は、それぞれ、フランジ123の厚さよりわずかに大きな幅を離して配置されている。このため、シリンジ120も、シリンジ110と同様、本体100の表面に強く固定することができる。
【0050】
本体100の表面であって、各シリンジ110,110,120を構成するピストン114,114,124の直下には、各ピストン114,114,124の移動方向に長い貫通穴130,130,140が形成されている。各貫通穴130,130,140の表面には、それぞれ、ピストン駆動部140,140,150が、本体100の内部の部材と連接され、貫通穴130,130,140から抜けないように配置されている。ピストン駆動部140,140,150は、略板状であってその左右両端を、所定の隙間をあけるようにシリンジ110,110,120側に折り返し、その折り返した両部分の間隔がフランジ115,115,125の径より小さくしている。また、上記所定の隙間は、フランジ115,115,125の厚さよりわずかに大きく設計されている。このため、フランジ115,115,125は、本体100の表面上方からピストン駆動部140,140,150に挿入されると、ピストン114,114,124の移動方向には抜けず、かつピストン駆動部140,140,150に強く固定される。この結果、ピストン114,114,124は、図中の矢印Bで示す方向にまっすぐ移動でき、その結果、外筒体111,111,121の内部をスムーズに移動できる。
【0051】
本体100の内部には、ピストン駆動部140,140,150を矢印Bで示す正逆両方向に駆動するためのステッピングモータ160,160,160が配置されている。ステッピングモータ160,160,160が個別に駆動制御されることにより、各シリンジ110,110,120内の流体を個別に送る動作あるいは戻す動作を実現できる。ピストン駆動部140,140,150がステッピングモータ160,160,160の回転によって移動するための構成については、後述する。
【0052】
本体100には、3本のシリンジ110,110,120に加えて、操作面を本体100の表面に露出させた形態にて、制御コントローラ190が配置されている。制御コントローラ190は、ステッピングモータ160,160,160に加え、多方活栓切換装置300に取り付けられる三方活栓302の流路を切り換え可能に駆動する第二駆動源(後述する)を駆動制御するための装置である。制御コントローラ190は、ステッピングモータ160,160,160および第二駆動源と電気的に接続されている。当該接続は、有線であるか無線であるかを問わない。
【0053】
制御コントローラ190は、ステッピングモータ160,160,160および第二駆動源を、予めユーザがセットしたプログラムに従って駆動制御する他、このシステム1の各処理ステップ毎に、マニュアル操作を行うこともできる。制御コントローラ190は、その操作面に、表示部191、条件設定用表示部192、ステップ移行あるいは制御対象の選択等に用いる各種キー193を含む。その他に、点灯あるいは点滅表示も存在する。
【0054】
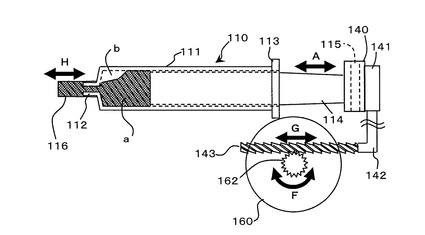
図4に示すように、シリンジ110を構成するピストン114は、ピストン駆動部140に固定された状態で外筒体111の内部空間を挿脱両方向に移動可能である。ピストン駆動部140は、ピストン114と反対側の端部に突部141を有している。その突部141は、連結部材142を介して、シリンジ110の方向に長いスクリュー143に接続されている。スクリュー143は、ステッピングモータ160の回転(または回動)に対応して回転(または回動)するギア162と噛み合っており、ギア162が回転(または回動)したときに、スクリュー143の長さ方向に移動する。このため、図4に示すように、ギア162が矢印F方向に回転(または回動)すると、スクリュー143が矢印G方向に移動し、ピストン114が矢印A方向に移動する。
【0055】
ここで、ギア162とスクリュー143の噛み合っている部分には、わずかに隙間があるため、ギア162の回転(または回動)方向を切り換えた際に、ギア162が回転(または回動)してもスクリュー143が移動しない「遊び」が生じ得る。供給に正確性を要求する流体の場合には、上記「遊び」が存在すると、制御コントローラ190にて設定した条件通りにその流体を供給できなくなる危険性がある。そこで、ギア162の回転(または回動)方向を、流体を戻す方向から送る方向に切り換えた直後に、上記「遊び」の距離あるいはそれ以上、送る方向にステッピングモータ160を回転(または回動)させ、上記「遊び」の距離を完全にゼロ、あるいはゼロに極めて近い状態にして停止するようにしている。この動作によって、次の送る動作の際には、ギア162の回転(または回動)にすぐに対応してスクリュー143が移動するので、流体を正確に送ることができる。これは、流体を戻す操作を行う場合にも同様であり、ステッピングモータ160を、流体を送る方向から戻す方向に切り換え、戻す動作を正確に行いたい場合には、駆動方向の切り換え直後に、戻す方向に「遊び」の距離あるいはそれ以上、ステッピングモータ160を回転させる。上記のような「遊び」の距離を減らす処理動作を行うか否かは、制御コントローラ190において選択できるようにし、あるいは選択不能に予め設定するようにしても良い。
【0056】
また、ステッピングモータ160を正逆両方向に回転(または回動)できるようにするメリットは、特に、次の点である。シリンジ110より下流側のチューブ(例えば、チューブ116)内の流体(ここでは、液体)aに気体bが存在する場合、当該気体bを除外しないと、流体aを正確に送ることが困難となる。そこで、気体bを、シリンジ110内に戻して外筒体111内の空間の上方に貯留できるようにする必要がある。ステッピングモータ160を双方向に回転(または回動)させると、図4に示すように、流体aを矢印H方向に移動することができるので、気体bをシリンジ110内に貯留させる処理を容易に行うことができる。
【0057】
(2)吸着カラム
吸着カラム200は、上流側および下流側に突出端部201を1個ずつ備えており、当該突出端部201を介して外部に通じる空間202をその内部に有する。この実施の形態では、上記空間202に、吸着材210が入れられている(図3中において、カッコ書きにて符号を付す)。この実施の形態では、吸着材210は、プラスミノーゲンを吸着する機能を有するものであれば、いかなるものでも良い。好適な吸着材としては、例えば、リジンセファロースに代表されるような多糖、親水性ビニルポリマーあるいはこれらの担体にプラスミノーゲンとの結合性の高い物質が担持された材料等を挙げることができる。ただし、プラスミノーゲンを吸着する目的以外で吸着カラム200を使用する場合には、上記材料以外の吸着材210を使用することができる。
【0058】
吸着カラム200の上流側は、シリンジ110,110,120とチューブ116,116,126およびチューブ127を介して接続される。具体的には、シリンジ110,110,120の各突起部112,112,122には、それぞれチューブ116,116,126の一端が接続され、チューブ116,116,126の他端は、接続分岐部材等を介して1本のチューブ127の一端に接続される。当該チューブ127の他端は、吸着カラム200の上流側の突出端部201に接続される。一方、吸着カラム200の下流側の突出端部201は、三方活栓302にチューブ220を介して接続される。これによって、各シリンジ110,110,120からの流体は、吸着カラム200を経由して、三方活栓302に導入することができる。
【0059】
(3)多方活栓切換装置
図5は、多方活栓切換装置300を図3の上方向(吸着カラム200から三方活栓302を見たときに左側の方向)から見た分解側面図である。図6は、三方活栓302の流路を切り換えるために回動する回動部材306をグリップし、かつ三方活栓302の活栓本体307を強くグリップする構造を説明するための図である。図6において、回動部材306および活栓本体307は一点鎖線で示している。図7は、三方活栓302の流路切換の制御を説明するための図である。
【0060】
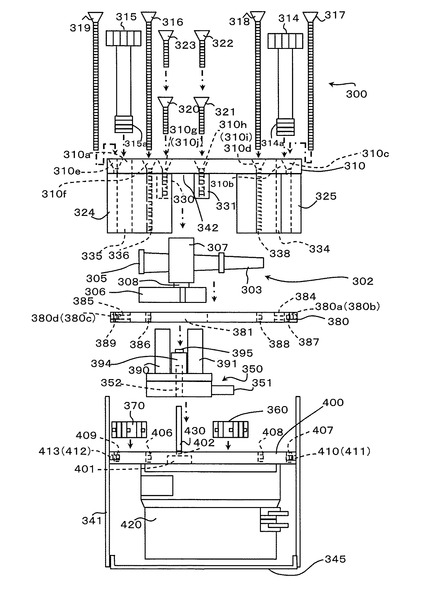
多方活栓切換装置300は、略直方体の外形を有しており、3階建ての構造を備える。多方活栓切換装置300の1階に相当する空間には、第二駆動源の一例である1個のステッピングモータ420が格納される。ステッピングモータ420は、2階の天井に相当する部分に固定されて、宙吊りの状態で多方活栓切換装置300の1階に相当する空間に格納される。多方活栓切換装置300の2階に相当する空間には、ステッピングモータ420の回動動作を制御する2個のスイッチ360,370と、ステッピングモータ420の回転軸430に接続され、三方活栓302の回動部材306を把持する4本の把持柱状部390,391,392,393(図6参照、図5には把持柱状部390,391のみ示されている。)を備えるクランプ350がそれぞれ格納される。スイッチ360,370は、2階の床(あるいは1階の天井)に相当する第一仕切板400に固定される。クランプ350は、第一仕切板400を1階から2階の方向に貫通突出する回転軸430の回転に従動して回転できるように、底部にある軸穴352に回転軸430を挿入した状態にて固定され、第一仕切板400上に配置される。
【0061】
多方活栓切換装置300の3階に相当する空間には、多方活栓切換装置300から着脱自在な三方活栓302が配置されている。三方活栓302は、互いに略90度間隔で平面上にて放射状に突出する3つの管303,304,305と、当該3つの管303,304,305の交差部分にある活栓本体307の一端にあって流体の流路を切り換えるために回転軸308を中心に回動可能な回動部材306とを備える。回動部材306は、四方に突起を有する。三方活栓302は、多方活栓切換装置300の2階に相当する空間と3階に相当する空間とを仕切る第二仕切板380の方向に回動部材306が向き、多方活栓切換装置300の天板310の方向に活栓本体307の他端が向くように、逆さの状態で固定される。この結果、図5に示すように、管303は図5の正面から見て右側に、管304は図5の正面から見て背面側(従って図5に表示されていない)に、管305は図5の正面から見て左側に向く。
【0062】
第二仕切板380は、クランプ350の上方に略円形の貫通穴381を有する。クランプ350上の4本の把持柱状部390,391,392,393は、多方活栓切換装置300の2階に相当する空間から3階に相当する空間の方向に向かって貫通穴381を貫通して突出し、三方活栓302の回動部材306を把持する。具体的には、把持柱状部390,391,392,393は、回動部材306の4つの突起の各付け根部分(へこんだ部分)に配置され、回動部材306をグリップする。各把持柱状部390,391,392,393同士の間隔および各把持柱状部390,391,392,393の長さは、回動部材306の各突起の付け根部分において回動部材306をグリップできるように設計されている。
【0063】
一方、天板310には、回動部材306と反対側から活栓本体307を把持し、その活栓本体307が回動部材306の回動に従動しないように活栓本体307を固定するための4本の固定脚部330,331,332,333が固定されている(図6参照、図5には固定脚部330,331のみ示されている。)。各固定脚部330,331,332,333同士の間隔および各固定脚部330,331,332,333の長さは、活栓本体307と各管303,304,305の各付け根部分において活栓本体307を固定できるように設計されている。このように、多方活栓切換装置300は、固定脚部330,331,332,333によって活栓本体307を固定させた状態で、クランプ350はステッピングモータ420の回動動作に基づき、スイッチ360,370による制御の下で回動部材306を回動させることができる。
【0064】
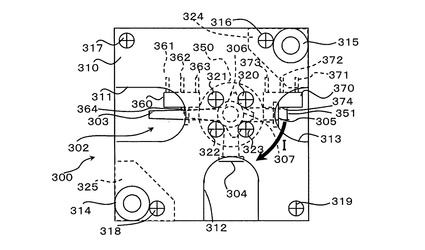
天板310は、図7に示すように、略正方形の広い面を有する薄い板であり、三方活栓302の三方に突出する各管303,304,305の方向において、それぞれ、内方にU字形状に窪む凹部311,312,313を有する。凹部311,312,313は、管303,304,305にチューブ等を接続しあるいは取り外す作業を行いやすくするために設けられている。三方活栓302は、多方活栓切換装置300の上方から見て中央からずれた位置に配置される。このため、凹部311,312の形状を、凹部313の形状に比べて深く切り込むようにし、管303,304にチューブ等を着脱容易にしている。
【0065】
天板310は、対角の2箇所に、天板310を第二仕切板380にボルト止めするために設けられた各1個のボルト貫通穴310a,310b(図5参照)を有する。また、図5において、ボルト貫通穴310a,310bの各隣、および天板310の他の角部の合計4箇所に、天板310を第二仕切板380および第一仕切板400にねじ止めにて固定するための各1個のねじ貫通穴310f,310d,310c,310eが設けられている。ボルト貫通穴310a,310bの内径の方がねじ貫通穴310f,310d,310c,310eの内径よりも大きい。また、図5および図7に示すように、天板310の裏側であって当該天板310の対角の2箇所には、五角柱形状の柱部材324,325が配置される。柱部材324には、その各天面から各裏面に向けて貫通するボルト貫通穴335およびねじ穴336が形成されている。ボルト貫通穴335は、天板310のボルト貫通穴310aと略同じ内径のボルト貫通穴であり、ねじ穴336は、天板310のねじ貫通穴310fと略同じ内径のねじ穴である。柱部材325にも、ボルト貫通穴335およびねじ穴336とそれぞれ同様のボルト貫通穴334およびねじ穴338が形成されている。ボルト貫通穴334は、天板310のボルト貫通穴310bと略同じ内径のボルト貫通穴であり、ねじ穴338は、天板310のねじ貫通穴310dと略同じ内径のねじ穴である。柱部材324,325のボルト貫通穴335,334およびねじ穴336,338は、柱部材324,325を天板310の正面側左角および背面側右角にそれぞれ配置した状態において天板310のボルト貫通穴310a,310bおよびねじ貫通穴310f,310dの各位置にそれぞれ一致するように、柱部材324,325に形成されている。
【0066】
第一仕切板400は、図5に示すように、ねじ穴406,408を有する。また、第一仕切板400の対角の2角には、それぞれ1個のねじ穴407,409を有する。第一仕切板400のねじ穴406,407,408,409は、天板310のねじ貫通穴310f,310c,310d,310eと垂直方向ほぼ一直線になる位置に形成されている。図5において、第一仕切板400の右側面および左側面には、第一仕切板400の内方に向かって各2個のねじ穴410,411およびねじ穴412,413が形成されている。ねじ穴410,411,412,413は、第一仕切板400を角筒341にねじ止めするための穴である。
【0067】
図5に示すように、第一仕切板400の平面上の中心からわずかにずれた位置には、ステッピングモータ420の回転軸430が貫通する貫通穴402が形成されている。また、貫通穴402の周囲であって第一仕切板400の裏面側には、貫通穴402より大径の円柱状の溝401が形成されている。溝401は、ステッピングモータ420の回転軸430の周囲の部分をはめ込むためのものである。
【0068】
第二仕切板380は、図5に示すように、対角の2角に、それぞれ1個のボルト用ねじ穴384,385を有する。図5におけるボルト用ねじ穴385の右側、第二仕切板380の正面に向かって右角、ボルト用ねじ穴384の左側および第二仕切板380の背面側左角には、それぞれ、ねじ穴386,387,388,389が形成されている。ボルト用ねじ穴385,384およびねじ穴386,387,388,389は、第二仕切板380において、天板310のボルト貫通穴310a,310bおよびねじ貫通穴310f,310c,310d,310eと垂直方向一直線になる位置に形成されている。ボルト貫通穴310a,310bの内径は、ねじ貫通穴310f,310c,310d,310eの内径に比べて大きい。図5において、第二仕切板380の右側面および左側面には、第二仕切板380の内方に向かって各2個のねじ穴380a,380bおよびねじ穴380c,380dが形成されている。ねじ穴380a,380b,380c,380dは、第二仕切板380を角筒341にねじ止めするための穴である。第二仕切板380の平面上の中心からずれた位置には、第一仕切板400に形成された貫通穴402と同心円になるように、円形の貫通穴381が形成されている。貫通穴381は、クランプ350上の4本の把持柱状部390,391,392,393が貫通でき、クランプ350の回転に支障のない大きさで形成されている。
【0069】
ボルト315は、その先端のみにねじ山部分315aを有する。ボルト315は、天板310および柱部材324に形成された各2箇所のボルト貫通穴310a,335を順に貫通し、第二仕切板380の各ボルト用ねじ穴385にねじ止めされる。ボルト314もボルト315と同じ形態であって、その先端のみにねじ山部分314aを有し、天板310および柱部材325に形成された各2箇所のボルト貫通穴310b,334を順に貫通し、第二仕切板380の各ボルト用ねじ穴384にねじ止めされる。ねじ316は、天板310のねじ貫通穴310fを貫通し、柱部材324のねじ穴336にねじ込まれて貫通し、第二仕切板380に形成されたねじ穴386にねじ込まれて貫通し、第一仕切板400に形成されたねじ穴406にてねじ止めされる。ねじ318は、天板310のねじ貫通穴310dを貫通し、柱部材325のねじ穴338にねじ込まれて貫通し、第二仕切板380に形成されたねじ穴388にねじ込まれて貫通し、第一仕切板400に形成されたねじ穴408にてねじ止めされる。ねじ317は、その直下が空間であるため、天板310の角に形成された1本のねじ貫通穴310cのみを貫通し、第二仕切板380に形成されたねじ穴387にねじ込まれて貫通し、第一仕切板400に形成されたねじ穴407にてねじ止めされる。ねじ319は、その直下が空間であるため、天板310の背面側左角に形成された1本のねじ貫通穴310eのみを貫通し、第二仕切板380に形成されたねじ穴389にねじ込まれて貫通し、第一仕切板400に形成されたねじ穴409にてねじ止めされる。
【0070】
このように、天板310と第二仕切板380とは、その両角において柱部材324,325を挟んだ状態でボルト315,314およびねじ316,318にて固定されるため、天板310と第二仕切板380は強固に結合される。さらに、天板310、第二仕切板380および第一仕切板400は、ねじ316,317,318,319によってねじ止めされるので、これら310,380,400が一体的に強固に結合される。
【0071】
図5に示すように、多方活栓切換装置300の1階および2階の領域の周囲は、正方形の開口部を有する角筒341にて覆われている。また、角筒341の底部(すなわち、多方活栓切換装置300の1階の床に相当する部分)は、図5に示すように、角筒341と溶接される底板345にて覆われている。第一仕切板400および第二仕切板380は、角筒341の開口内部と同じか若しくはわずかに小さい大きさの板である。
【0072】
天板310には、4本のねじ320,321,322,323をねじ込み可能な4個のねじ穴310g,310h,310i,310j(図5参照)が貫通して形成されている。ねじ穴310g,310h,310i,310jは、略正方形の角の位置になるように配置されている。ねじ320,321,322,323は、天板310の厚さより長い。このため、ねじ320,321,322,323を、それぞれねじ穴310g,310h,310i,310jに最大限ねじ込んだ状態では、ねじ320,321,322,323の各先端から一部の長さが突き抜けている。ねじ320,321,322,323の突き抜けた部分は、筒体(チューブ)によって着脱自在に覆われている。このように、固定脚部330,331,332,333は、当該筒体とねじ320,321,322,323を主要部としている。三方活栓302の活栓本体307を固定脚部330,331,332,333によりしっかりと固定するために、筒体の材料および肉厚を選択することができる。活栓本体307と固定脚部330,331,332,333との隙間を低減し、かつ活栓本体307と固定脚部330,331,332,333との間で滑らないようにするためには、ゴムのように柔軟性に富みかつ摩擦係数の高い材料で、ねじ320,321,322,323の外周と活栓本体307との隙間を十分に埋めることができる厚さを有する筒体を選択するのが好ましい。また、ゴムよりも硬度の高い樹脂(例えば、フッ素樹脂)から成る筒の外表面にゴムをコートした多層構造の筒体を選択することもできる。
【0073】
図5および図7に示すように、多方活栓切換装置300の2階に相当する空間には、2個のスイッチ360,370が配置されている。スイッチ360,370は、ステッピングモータ420の回転に従動するクランプ350の外側の領域において上方から見て左右ほぼ一直線になる位置にて、第一仕切板400上に固定されている。スイッチ360,370は、クランプ350の回動動作の妨げにならない位置に、第一仕切板400の裏面から固定される。
【0074】
図7に示すように、スイッチ360は、略直方体の形状を有しており、その長さ方向に並ぶ接続端子361,362,363を備えている。接続端子361,362,363と反対側の面において、接続端子362の真後には、スイッチ360の内方に押し込み可能であって、突出する向きに復元可能に付勢される凸部364が存在する。スイッチ370は、スイッチ360と同様に略直方体の形状を有しており、その長さ方向に並ぶ接続端子371,372,373を備えている。接続端子371,372,373と反対側の面において、接続端子372の真後には、スイッチ370の内方に押し込み可能であって、突出する向きに復元可能に付勢される凸部374が存在する。スイッチ360の各接続端子361,362,363およびスイッチ370の各接続端子371,372,373は、ステッピングモータ420を駆動する回路(不図示)に接続されている。
【0075】
スイッチ360は、多方活栓切換装置300の図7に示す上方側に接続端子361,362,363が突出する向きで固定される。スイッチ370も同様に、当該上方側に接続端子371,372,373が突出する向きで固定される。クランプ350は、その中心からクランプ350の径方向外側に向かって伸びる一本の押圧部材351を備える。押圧部材351は、その長さ方向の一端にねじ部を有し、クランプ本体350aの側面に形成された複数のねじ穴357,358等の一つにねじ込んで固定可能である(図6参照)。押圧部材351の長さは、スイッチ360,370の凸部364,374に届く長さである。押圧部材351は、クランプ350と一体的に回動する。図7の右方向を角度ゼロとした場合において、押圧部材351の先端が角度ゼロの方向を向いているときには、押圧部材351がスイッチ370の凸部374をスイッチ370の内方に向けて押し込んでいる。この際、ステッピングモータ420は停止状態である。この状態からステッピングモータ420が回転して、クランプ350が180度回転すると、押圧部材351は、図7の状態から時計の針の回転方向と同方向に回転する(図7の矢印I方向に回転する)。その後、押圧部材351は、スイッチ360の凸部364をその内方に押し込む。これにより、ステッピングモータ420は停止する。逆に、押圧部材351は、スイッチ360の位置から時計の針の回転方向と逆方向に回転すると、スイッチ370の凸部374をその内方に押し込んで、ステッピングモータ420は停止する。このように、ステッピングモータ420の停止は、押圧部材351による凸部364または凸部374の押し込みをトリガとして実行される。
【0076】
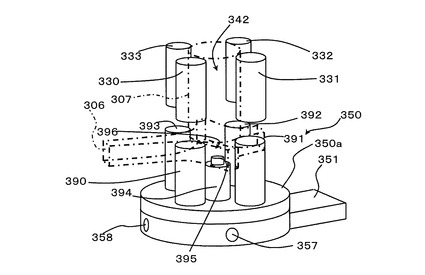
把持柱状部390,391,392,393は、それぞれ、略クロス形状の回動部材306の隣接する突起同士の間の凹部に接触した状態で回動部材306をグリップする。各把持柱状部390,391,392,393に囲まれた第一領域396に存在する柱状部394の先端にある凸部395は、回動部材306の下面に接触、あるいは下面の凹部にはまり込んでいる。一方、固定脚部330,331,332,333は、第二領域342に活栓本体307を挿入した状態で活栓本体307の側面を強くグリップする。このため、クランプ350の回動に従動して回動部材306が回動しても、活栓本体307は回動しない。なお、活栓本体307の上端部は、天板310に接触している。活栓本体307の上端部に内方に窪む凹部(多角形の底面を有する凹部が好ましい)が存在する場合には、天板310の裏面に当該凹部にきつく挿入可能な凸部を備えるのが好ましい。活栓本体307の回動をさらに抑制できるからである。
【0077】
(4)その他(システム外の採取用シリンジおよび廃液容器)
図3に示すように、採取用シリンジ450は、上述のシリンジ110とほぼ同じ形態を有する。採取用シリンジ450の一端には、突起部462が形成されており、内部空間に連通する穴を有する。突起部462は、不図示の除菌フィルタを介して、点線Dで示すように管305に接合される。採取用シリンジ450は、トラネキサム酸により吸着カラム200から分離したプラスミノーゲンを回収する容器である。
【0078】
また、廃液容器500は、その一端側に突起部501を有し、その突起部501を通る穴から内部の空間に廃液を入れる容器である。突起部501にはチューブ550の一端が接続され、点線Eで示すように、チューブ550の他端が管304に接続される。三方活栓302の流路の切り換えにより、吸着カラム200を通った流体は、廃液容器500および採取用シリンジ450に振り分けられる。
【0079】
次に、多方活栓切換フローシステム1の動作の流れを、図8に基づいて説明する。
【0080】
生理食塩水50mlを充填したシリンジ110、血液30mlを充填したシリンジ110および10%トラネキサム酸(以後、トラネキサム酸という。)10mlを充填したシリンジ120を、空気だまりが上になるように、本体100にセットする。続いて、三方活栓302を多方活栓切換装置300にセットする。次に、各シリンジ110,110,120と吸着カラム200、および吸着カラム200と三方活栓302とをそれぞれ接続する。続いて、三方活栓302の管304側に廃液容器500を取り付けると共に、管305側に除菌フィルタを介して、プラスミノーゲンの採取に用いられる採取用シリンジ450を接続し、フィルタ付きエアー針を立てる。各接続に緩みがないことを確認して、多方活栓切換フローシステム1の組み立てを完了する。
【0081】
次に、制御コントローラ190を用いて、各シリンジ110,110,120内の流体を正方向に送る際の流速および送液時間をセットする(具体的な条件については、具体的な処理の説明において言及する。)。続いて、三方活栓302の流路切り換えのタイミングについてセットする。各流体の逆送によって空気を各シリンジ110,110,120に戻す操作については、この実施の形態では空気を観察しながらマニュアルで操作する選択をする。そして、当該マニュアル操作が終了すると、元のプログラムに戻るようなプログラムを設定する。こうして、制御コントローラ190を用いたプログラミングを完了すると、以下の流れで各処理が進行する。
【0082】
図8は、上記のセッティングの後の多方活栓切換フローシステム1における各処理の流れを示すフローチャートの一例である。
【0083】
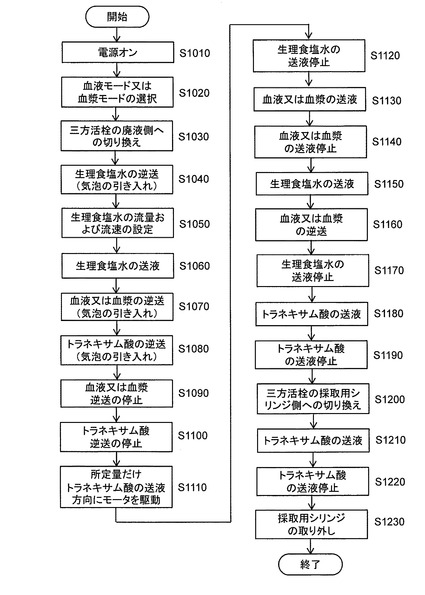
まず、ユーザの操作によって電源がオンになると(ステップS1010)、シリンジ110の一つに血液を入れているか血漿を入れているかの選択を要求する表示が行われる。ユーザが血液モードあるいは血漿モードのいずれかを選択すると(ステップS1020)、制御コントローラ190は、ユーザにより予め入力されたプログラムに従って、多方活栓切換装置300のステッピングモータ420を駆動して、吸着カラム200と廃液容器500を結ぶ流路のみが形成されるようにする(ステップS1030)。ここでは、血液モードを選択した場合について、以後の処理を説明する。この後、制御コントローラ190の操作面上において、生理食塩水の逆送をマニュアルにて行うことを促す表示がされる。ユーザが生理食塩水を毎分0.5mlで生理食塩水用のシリンジ110のピストン114を駆動するためのステッピングモータ160を逆転駆動し、空気を生理食塩水用のシリンジ110内に引き入れたことを確認したら、逆転駆動を停止する(ステップS1040)。なお、経路中に空気が存在しない場合あるいは経路にエアートラップを接続している場合には、必ずしもステップS1040のような逆送ステップを行わなくても良い。生理食塩水用のシリンジ110以外の他のシリンジ110,120における逆送ステップについても同様である。生理食塩水を引き込む流速(毎分0.5ml)については、予めプログラムにて設定されていても、ユーザが逆転駆動時に設定するようにしてもよい。
【0084】
次に、ユーザは、生理食塩水の正方向への送液の流量を10mlに、流速を毎分2mlに設定する(ステップS1050)。なお、流量と流速の少なくとも一方が予めプログラミング時に設定されていてもよい。流量と流速の両方が予め設定されている場合には、ステップS1050は、それら条件を確認するステップであってもよい。ステップS1050に続いて、マニュアルから自動制御プログラムに移行し、制御コントローラ190は、生理食塩水の正方向への送液を行う(ステップS1060)。この後、制御コントローラ190の操作面上において、血液の逆送をマニュアルにて行うことを促す表示がされる。ユーザが血液を毎分0.5mlで血液用のシリンジ110のピストン114を駆動するためのステッピングモータ160を逆転駆動する(ステップS1070)。血液を引き込む流速(毎分0.5ml)については、予めプログラムにて設定されていても、ユーザが逆転駆動時に設定するようにしてもよい。また、同様に、制御コントローラ190の操作面上において、トラネキサム酸の逆送をマニュアルにて行うことを促す表示がされる。ユーザがトラネキサム酸を毎分0.5mlでトラネキサム酸用のシリンジ120のピストン124を駆動するためのステッピングモータ160を逆転駆動する(ステップS1080)。トラネキサム酸を引き込む流速(毎分0.5ml)については、予めプログラムにて設定されていても、ユーザが逆転駆動時に設定するようにしてもよい。その後、空気を血液用のシリンジ110内およびトラネキサム酸用のシリンダ120内に引き入れたことを確認したら、逆転駆動を停止する(ステップS1090、ステップS1100)。
【0085】
ステップS1100まで進行した時点でマニュアルから自動制御プログラムに移行する。制御コントローラ190は、シリンジ120のピストン124を駆動するためのステッピングモータ160を正転駆動し、毎分0.5mlでトラネキサム酸0.2mlを送り、停止する(ステップS1110)。この送り量は、前述の「遊び」を十分に解消できる量である。その後、生理食塩水の送液が停止する(ステップS1120)。続いて、制御コントローラ190は、血液用のシリンジ110のピストン114を駆動するためのステッピングモータ160を正転駆動し、流量28ml、流速毎分0.5mlで血液を送る(ステップS1130)。これによって、プラスミノーゲンが吸着カラム200内の吸着材210に吸着する。制御コントローラ190は、血液を28ml送る時間、ステッピングモータ160を正転駆動した時点で停止する(ステップS1140)。次に、制御コントローラ190は、生理食塩水用のシリンジ110のピストン114を駆動するためのステッピングモータ160を正転駆動し、流量30ml、流速毎分1.0mlで生理食塩水を送る(ステップS1150)。この後、制御コントローラ190の操作面上において、血液の逆送をマニュアルにて行うことを促す表示がされる。ユーザが血液2.0mlを毎分1.0mlで逆送すべく、血液用のシリンジ110のピストン114を駆動するためのステッピングモータ160を逆転駆動する(ステップS1160)。血球の流出防止のためである。血液を引き込む流速(毎分1.0ml)については、予めプログラムにて設定されていても、ユーザが逆転駆動時に設定するようにしてもよい。
【0086】
続いて、制御コントローラ190は、生理食塩水30mlの送液が終了する時間になると、生理食塩水用のシリンジ110のピストン114を駆動するためのステッピングモータ160を停止する(ステップS1170)。次に、制御コントローラ190は、トラネキサム酸用のシリンジ120のピストン124を駆動するためのステッピングモータ160を正転駆動し、流量1.5ml、流速毎分0.5mlでトラネキサム酸を送る(ステップS1180)。この段階では、トラネキサム酸によるプラスミノーゲンの吸着材210からの分離効率が低いので、廃液容器500側に流す。ここで、ステップS1180において廃液容器500側に送るトラネキサム酸(ここでは、1.5ml)は、本システム1内の経路の構成、吸着カラム200内の充填容積、吸着材210等に合わせて、プラスミノーゲンの最適な回収量が得られるように設定することができる。トラネキサム酸を送液する流速(毎分0.5ml)については、予めプログラムにて設定されていても、ユーザが正転駆動時に設定するようにしてもよい。
【0087】
続いて、制御コントローラ190は、トラネキサム酸1.5mlの送液が終了する時間になると、トラネキサム酸用のシリンジ120のピストン124を駆動するためのステッピングモータ160を停止する(ステップS1190)。次に、制御コントローラ190は、多方活栓切換装置300のステッピングモータ420を駆動して、吸着カラム200と採取用シリンジ450を結ぶ流路に切り換える(ステップS1200)。続いて、制御コントローラ190は、トラネキサム酸用のシリンジ120のピストン124を駆動するためのステッピングモータ160を正転駆動し、流量2.0ml、流速毎分0.5mlでトラネキサム酸を送る(ステップS1210)。トラネキサム酸を送液する流速(毎分0.5ml)については、予めプログラムにて設定されていても、ユーザが正転駆動時に設定するようにしてもよい。ステップS1210の際には、吸着材210に吸着していたプラスミノーゲンの分離効率が高くなっているので、採取用シリンジ450にて採取している。
【0088】
続いて、制御コントローラ190は、トラネキサム酸2.0mlの送液が終了する時間になると、トラネキサム酸用のシリンジ120のピストン124を駆動するためのステッピングモータ160を停止する(ステップS1220)。制御コントローラ190の制御は、ここで終了する。最後に、採取用シリンジ450からエアー針を抜き、除菌フィルタを三方活栓302側からはずし(ステップS1230)、プラスミノーゲンの採取を完了する。その後、採取用シリンジ450は、蓋をして冷凍保存される。
【0089】
次に、採取終了後の手順について説明する。
【0090】
エアー針および除菌フィルタは、各先端をカバーして廃棄する。三方活栓302の管305側の開口部にキャップを付けて塞ぐ。次に、制御コントローラ190のマニュアル操作により三方活栓302の流路を切り換えて、吸着カラム200と廃液容器500とを結ぶ流路を開く。ステッピングモータ160を駆動して血液用のシリンジ110内の血液を廃液容器500内に高速で送液し、シリンジ110が空になった時点でステッピングモータ160を停止する。同時に、ステッピングモータ160を駆動してトラネキサム酸用のシリンジ120内のトラネキサム酸を廃液容器500内に高速で送液し、シリンジ120が空になった時点でステッピングモータ160を停止する。ステッピングモータ160の停止時には、アラームが鳴るようにすることもできる。また、これらの操作はマニュアルでも、制御コントローラ190のプログラムによる自動処理でもよい。自動処理の場合、ピストン114,124が限界まで移動したときのステッピングモータ160,160にかかる過負荷、あるいはピストン114,124の各先端の位置のセンサーによる検知等により、ステッピングモータ160,160を停止することができる。
【0091】
全ての廃液(少なくとも血液、トラネキサム酸を含む)を廃液容器500内に送り込んだ時点で、マニュアル操作にて三方活栓302の流路を切り換えて、廃液容器500側を閉にする。最後に、各シリンジ110,110,120および三方活栓302を外し、これらを廃棄する。このように、各シリンジ110,110,120および三方活栓302を廃棄できるので、次の処理の際に、汚染あるいは感染を防止できる。これをもって、プラスミノーゲン採取終了後の処理を終了する。
【0092】
図8に基づいて説明した上記各処理には、ユーザによるマニュアル操作が含まれているが、予め、送液あるいは逆送の流速および/または時間を決めることにより、全ての処理を制御コントローラ190による自動制御によって実行することができる。その場合、予め、ユーザが制御コントローラ190の操作面上の操作によってプログラミングし、あるいはデフォルトで組み込まれたプログラムをユーザが選択することにより、自動制御にてプラスミノーゲンの採取を実行できる。
【0093】
また、図8に基づいて説明した上記各処理の内で、制御コントローラ190による自動制御で行う処理については、その内の一部をユーザのマニュアル操作によって実行するようにしても良い。
【産業上の利用可能性】
【0094】
本発明の多方活栓切換フローシステムは、例えば、製剤、分析、薬剤投与等のように、複数の流体を送る方向を切り換える必要のある分野において利用可能である。
【図面の簡単な説明】
【0095】
【図1】図1は、本発明の好適な実施の形態に係る多方活栓切換フローシステムの一例を示す概略構成図である。
【図2】図2は、本発明の好適な実施の形態に係る多方活栓切換フローシステムの別の例を示す概略構成図である。
【図3】図3は、図1に示す多方活栓切換フローシステムの具体的な構成を示す平面図である。
【図4】図4は、図3に示す多方活栓切換フローシステムにおいて、各シリンジから流体を送るあるいは戻す動作を行うための機構例を示す図である。
【図5】図5は、図3に示す多方活栓切換装置を図3の上方向から見た分解側面図である。
【図6】図6は、図5に示す三方活栓の流路を切り換えるために回動する回動部材をグリップし、かつ三方活栓の活栓本体を強くグリップする構造を説明するための図である。
【図7】図7は、図5に示す三方活栓の流路切換の制御を説明するための図である。
【図8】図8は、図3に示す多方活栓切換フローシステムにおける各処理の流れを示すフローチャートの一例である。
【符号の説明】
【0096】
1 多方活栓切換フローシステム
10 容器(第一容器、第二容器、第三容器を含む)
15 流体(例えば、液体)
20 第一駆動源
25 チューブ
28 チューブ
30 吸着カラム
40 多方活栓切換装置
42 多方活栓
43 第二駆動源
50 制御装置
80 多方活栓切換装置
82 多方活栓
83 第二駆動源
90 制御装置
110 シリンジ(第一容器、第二容器)
120 シリンジ(第三容器)
160 ステッピングモータ(第一駆動源)
190 制御コントローラ(制御装置)
200 吸着カラム
302 三方活栓(多方活栓の一例)
a 流体
b 気体
【技術分野】
【0001】
本発明は、複数の流体のフロー方向を制御する多方活栓切換フローシステムに関する。
【背景技術】
【0002】
近年、人体への薬液投与、薬剤の製造、分析等において正確な流体の供給が要求されている。例えば、人体の血管内に、鎮痛剤、インシュリン製剤、抗生物質あるいは抗癌剤等を供給する場合には、その量が少なすぎると効果が小さく、多すぎると、鎮痛剤の場合には肝機能障害、インシュリン製剤の場合には急激な血糖値の低下による意識低下、抗生物質の場合には耐性菌の増殖、抗癌剤の場合には副作用による臓器不全などの様々な弊害が生じ得る。このため、所定の時間をかけて人体に薬剤を投与する際には、薬剤を正確な流速にて供給するための流量調整装置が用いられる(例えば、特許文献1参照)。
【0003】
一方、薬剤の製造現場においては、その製造に必要な流体を特に正確に供給することが求められている。その一例として、プラスミノーゲンの製造を挙げる。プラスミノーゲンは、ヒト血漿中に含まれる一本鎖糖蛋白質であり、プラスミノーゲンアクチベータ(ウロキナーゼ(u-PA)および組織プラスミノーゲンアクチベータ(t-PA))によって活性化されると、プラスミンになる。プラスミンは、フィブリンを溶解する作用を持つことから、有効な血栓溶解剤として知られている。このようなプラスミンの前駆体であるプラスミノーゲンをヒト血漿中から分離・取得するための一つの手法として、ヒトの血液若しくは血漿を特定のポリマーあるいはモノクロナール抗体を含む吸着カラムに通してプラスミノーゲンを吸着させ、その後に特定の脱着剤を吸着カラムに通して、プラスミノーゲンと結合することにより吸着カラムから離脱させる方法が知られている(例えば、特許文献2および特許文献3を参照)。
【0004】
さらに、分析の現場においても、正確かつ高効率の分析を行うには、用いる試薬あるいは分析対象のサンプルを正確に供給することが求められる。
【特許文献1】特開2001−104479号公報
【特許文献2】特表2008−511546号公報
【特許文献3】特開平10−179159号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかし、上記従来からの人体への薬剤の投与、薬剤の製造および分析には、次のような解決すべき問題がある。いずれの従来技術の場合も、人のマニュアル操作によって薬剤等の流体の供給量(あるいは供給速度)の調整を行っているため、その供給量(あるいは供給速度)の正確性に欠ける。また、流路を切り換える必要が生じた際にマニュアルにて操作するので、流路の瞬時あるいは確実な切り換えが困難である。ここで、電磁バルブあるいはエアーバルブ等を採用して確実かつ瞬時に流路の切り換えを行うことも考えられるが、切り換え時の振動が大きく、流体の供給の安定化の妨げになりやすい。また、かかる種類のバルブを用いると、バルブ内での流体の残留に伴うコンタミネーションの危険性がある。加えて、流体の当該コンタミネーションを避けるために、電磁バルブやエアーバルブを使い捨てにすると、装置の高コスト化を招く。
【0006】
本発明は、かかる問題を解決するためになされたものであって、流体の正確で安定した供給および切り換え、ならびに低コストにてコンタミネーションを防止可能な多方活栓切換フローシステムを提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明者らは、上記課題を解決すべく鋭意研究開発を行ってきた結果、手動操作可能な多方活栓を着脱自在に組み込み、その手動ノブを電動にて回動できる多方活栓切換装置と、複数の容器内から上記の多方活栓に向けて流体を送るための駆動源と、多方活栓の切り換えと流体のフロー動作とを制御する制御装置とを備えたシステムを完成した。具体的なシステムは、以下の通りである。
【0008】
本発明の一つの形態は、複数の流体のフロー方向を制御するシステムであって、流体を内部に充填し、外部にその流体を排出可能な複数の容器と、上記複数の容器から送られる上記流体のフロー方向を複数パターンに切り換え可能な多方活栓を着脱可能に取り付けた1または複数の多方活栓切換装置と、上記容器内の流体を上記多方活栓に向けて送る方向および当該方向と逆方向の内、少なくとも一方向に上記流体を送るための第一駆動源と、上記多方活栓のフロー方向を切り換えるための第二駆動源と、上記第一駆動源および上記第二駆動源の駆動を制御する制御装置とを備える多方活栓切換フローシステムである。
【0009】
また、本発明の別の形態は、前記容器から前記流体を送る下流側の経路中に、前記容器内の前記流体の構成要素を吸着させる吸着カラムを配置している多方活栓切換フローシステムである。
【0010】
また、本発明の別の形態は、前記複数の容器から前記多方活栓装置までの経路を、各容器内の前記流体を合流して前記多方活栓に送るように構成している多方活栓切換フローシステムである。
【0011】
また、本発明の別の形態は、前記第一駆動源が正逆両方向に前記流体を送るように駆動可能であって、少なくとも1つの前記容器内の前記流体を前記容器内に戻す方向から前記多方活栓に向けて送る方向に、前記第一駆動源の駆動方向を切り換えた直後に、前記制御装置は、前記第一駆動源の駆動動作と前記容器内の前記流体を送る動作とが正確に応答できる分あるいはそれ以上、前記流体を当該送る方向に移動させる向きに前記第一駆動源を駆動する多方活栓切換フローシステムである。
【0012】
また、本発明の別の形態は、前記流体を液体として、前記制御装置が少なくとも1つの前記容器の下流側に存在する気体を前記容器内に戻すために、前記第一駆動源を前記逆方向に駆動する多方活栓切換フローシステムである。
【0013】
また、本発明の別の形態は、前記複数の容器が生理食塩水を入れた第一容器、血液若しくは血漿を入れた第二容器、上記血液若しくは上記血漿中の特定の成分と結合可能な溶液を入れた第三容器を含み、前記第一駆動源が上記第一容器、上記第二容器および上記第三容器内の各液体を、前記多方活栓に送る方向および当該送る方向と逆方向の双方向に送ることができるように個別に駆動可能であって、前記吸着カラムが上記特定の成分を吸着可能なカラムであって、前記制御装置が上記第一容器から上記生理食塩水を前記多方活栓に向けて送り、その後、上記第二容器から上記血液若しくは上記血漿を前記多方活栓に向けて送り、その後、前記多方活栓を切り換え、その後、上記第三容器からその中の溶液を前記多方活栓に向けて送るように、前記第一駆動源の駆動を制御する多方活栓切換フローシステムである。
【0014】
ここで、「容器」とは、流体をその内部に充填し、それを容器外に出すことができるものであれば、その形状あるいは材料を問わない。例えば、容器の材料として、ポリマー、エラストマー、金属等を用いても良い。また、容器の形態として、略定形的なシリンジ、ボンベ、缶の他、非定形的なバッグであっても良い。また、「流体」は、気体、液体を含むように広義に解釈される。
【0015】
「多方活栓」は、少なくとも二方向に切り換えて流体を送ることができるバルブであれば、三方向以上の切り換えパターンを有するものも含む。また、多方活栓は、使用後に容易に捨てることができる手動の多方活栓である。「多方活栓切換装置」は、上記多方活栓を着脱自在に組み込み可能であって、その流路切り換え部分(例えば、手動のノブ、ハンドル)を駆動する装置である。多方活栓切換装置は、本発明のシステムに1つあるいは2つ以上備えられていても良い。
【0016】
「チューブ」は、容器内の流体を多方活栓あるいはそれより下流側の経路において流体の流路となる管であれば、その形態あるいは材料を問わない。チューブ内部の穴断面が略円形の他、略多角形であっても良い。チューブの材料は、チューブが変形自在となるような樹脂等であっても、変形しにくい金属等であっても良い。チューブは、複数の容器から並列で個別の多方活栓に接続されていてもよく、あるいは複数の容器から一旦合流して多方活栓に接続されていても良い。なお、当該チューブは、このシステムにおいて必須の構成部材ではない。
【0017】
「第一駆動源」は、容器内の流体を多方活栓に向けて送る方向(正方向という)とその反対方向(逆方向という)の内、少なくともいずれか一方に当該流体を送るように駆動する装置をいい、例えば、遠心ポンプ、プロペラポンプ、粘性ポンプ等に代表される非容積式ポンプ、往復動ポンプおよび回転ポンプ等に代表される容積式ポンプなどの各種ポンプおよび必要に応じてその駆動伝達部を含む。また、第一駆動源は、DCモータ、DCサーボモータ、RCサーボモータ、単相交流モータ、ACサーボモータ、誘導モータ、ステッピングモータ、DDモータ等の各種モータおよび必要に応じてその駆動伝達部も含む。
【0018】
本発明の多方活栓切換フローシステムに配置される容器が略水平に静置される場合には、第一駆動源は、容器内の流体を正逆両方向に送るように駆動する装置であるのが好ましい。フロー対象の流体が液体である場合、シリンジの下流側の液体中に存在する気体を容器内に引き込むために、第一駆動源は、液体を本来のフロー方向とは逆の方向に送るように駆動することができる。これにより、気体をフロー方向に送るのを防ぐことができる。一方、容器が略垂直に立てるように配置され、液体が下方から排出される場合には、常時、重力によって液体を排出する向きに力がかかっているので、第一駆動源が正方向に液体を送るように駆動せずに、逆方向に液体を送るように駆動するだけの装置であっても良い。また、容器が略垂直に立てるように配置され、液体が上方から排出される場合には、常時、重力によって液体を排出しない方向に力がかかっているので、第一駆動源が逆方向に液体を送るように駆動せずに、正方向に液体を送るように駆動するだけの装置であっても良い。第一駆動源は、容器の数と同じ数だけ備えられ、容器内の液体の送り込みを個別に行うものでも良く、あるいは2以上の容器に共有の1個の第一駆動源を備えていても良い。
【0019】
「第一駆動源の駆動動作と容器内の流体を送る動作とが正確に応答できる分」とは、第一駆動源が駆動するとその駆動を無駄にせずにフロー動作を行うのに必要な駆動系の「遊び」の分を意味する。第一駆動源の駆動を切り換える際には、その切り換え直後の第一駆動源の駆動動作に対応して、すぐに流体のフロー動作が行われないことがある。これは、第一駆動源と容器におけるフローに必要な駆動部分との接続に、「遊び」が存在するからである。第一駆動源がこの「遊び」を解消するための動作を行ってから、フローに必要な駆動を実行すると、第一駆動源の駆動に対して正確な量の流体を送ることができる。「遊び」を確実に解消するために、「第一駆動源の駆動動作と容器内の流体を送る動作とが正確に応答できる分」を超える分、駆動することもできる。
【0020】
「第二駆動源」は、多方活栓の流路切り換え部分を駆動するものであって、ポンプ、モータおよび必要に応じてその駆動伝達部も含む。第二駆動源の数は、限定されるものではなく、1つあるいは2以上備えていても良い。また、多方活栓の数と同数あるいはそれより少ない数の第二駆動源を備えることができる。
【0021】
「制御装置」とは、第一駆動源および第二駆動源の駆動をコンピュータ等により制御する装置であれば、使用者の手動設定によって実行可能な装置であっても、使用者が設定した実行パターンをコンピュータプログラムにより記憶させ、その実行パターンにしたがってフロー動作を実行する装置であっても良い。
【0022】
「吸着カラム」は、複数の容器内の少なくとも一つの容器に入っている流体を構成する構成要素の一部を吸着可能な材料を含む吸着手段であれば、何でも採用できる。好適な例では、血液若しくは血漿中のプラスミノーゲンを吸着できる材料(特定のポリマーや抗体)を含むものである。
【発明の効果】
【0023】
本発明によれば、流体の正確で安定した供給および切り換え、ならびに低コストにてコンタミネーションを防止可能な多方活栓切換フローシステムを提供することができる。
【発明を実施するための最良の形態】
【0024】
次に、本発明の多方活栓切換フローシステムの実施の形態につき、説明する。
【0025】
1.システム構成
【0026】
(システム例1)
図1は、本発明の好適な実施の形態に係る多方活栓切換フローシステム1の一例を示す概略構成図である。
【0027】
多方活栓切換フローシステム1は、複数の流体15のフロー方向を制御するシステムであって、流体15を内部に充填し、外部にその流体15を排出可能な複数の容器10と、流体15のフロー方向を複数パターンに切り換え可能な1個の多方活栓42を着脱可能に取り付けた1個の多方活栓切換装置40と、各容器10内の流体15を多方活栓42に向けて送る方向(正方向)および当該正方向と逆方向に流体15を送るための複数の第一駆動源20と、多方活栓42のフロー方向を切り換えるための1個の第二駆動源43と、第一駆動源20および第二駆動源43の各駆動を制御する1個の制御装置50を備える。容器10は、ここでは、好適に、「シリンジ」を用いることができる。また、多方活栓42は、ここでは、好適に、「三方活栓」を用いることができる。
【0028】
第一駆動源20は、各容器10に1個ずつ用意され、制御装置50による制御の下、容器10内の流体15の送りと戻しの双方向に駆動する。第二駆動源43は、多方活栓切換装置40に組み込まれており、制御装置50による制御の下、多方活栓42の流路切換操作部41を回動する動作を行う。第一駆動源20および第二駆動源43は、ここでは、好適に、ステッピングモータを用いることができる。
【0029】
各容器10と多方活栓42との間には、チューブ25,28が配置される。各容器10のフロー方向下流側には、それぞれチューブ25が接続される。各チューブ25は、別の一本のチューブ28と接続される。多方活栓42の下流側には、容器60,70が接続される。容器70と多方活栓42とはチューブ45で接続される。例えば、一つの容器10から流体15を送り、多方活栓42を通って容器70に入れる動作を終了後、多方活栓42の流路を容器60の方向に切り換え、先の容器10とは別の容器10からの流体15を送り、容器60に入れるようにすることができる。
【0030】
各容器10と多方活栓42との間には、必要に応じて、流体15の構成要素を吸着させるための吸着カラム30を配置することができる。吸着カラム30の上流側は、チューブ28に接続される。吸着カラム30フロー方向下流側と多方活栓42のフロー方向上流側は、チューブ35にて接続される。ただし、吸着カラム30のフロー方向下流側を、直接、多方活栓42のフロー方向上流側に接続することにより、チューブ35を用いないようにしても良い。また、チューブ25,28を用いず、容器10の下流側と吸着カラム30の上流側とを直接、接続しても良い。また、チューブ28のみを省略し、各容器10に接続した各チューブ25を別々に吸着カラム30に接続しても良い。
【0031】
第一駆動源20は、正逆両方向に流体15を送るように駆動可能である場合において、少なくとも1つの容器10内の流体15をその容器10内に戻す方向から多方活栓42に向けて送る方向に第一駆動源20の駆動方向を切り換えた直後、制御装置50は、第一駆動源20の駆動動作と容器10内の流体15を送る動作とが正確に応答できる分あるいはそれ以上、流体15を当該送る方向に移動させる向きに第一駆動源20を駆動するようにしても良い。
【0032】
流体15に液体を用いた場合において、制御装置50は、少なくとも1つの容器10の下流側に接続されるチューブ25内の流体15中に存在する気体を容器10内に戻すために、第一駆動源20を逆方向に駆動するようにしても良い。
【0033】
(システム例2)
図2は、本発明の好適な実施の形態に係る多方活栓切換フローシステム1の別の例を示す概略構成図である。
【0034】
この多方活栓切換フローシステム1は、複数の流体15のフロー方向を制御するシステムであって、流体15を内部に充填し、外部にその流体15を排出可能な複数の容器10と、流体15のフロー方向を複数パターンに切り換え可能な1個の多方活栓42を着脱可能に取り付けた複数の多方活栓切換装置40と、流体15のフロー方向を複数パターンに切り換え可能な1個の多方活栓82を着脱可能に取り付けた1個の多方活栓切換装置80と、各容器10内の流体15を各多方活栓42に向けて送る方向(正方向)および当該正方向と逆方向に流体15を送るための複数の第一駆動源20と、各多方活栓42のフロー方向を切り換えるための複数の第二駆動源43と、多方活栓82のフロー方向を切り換えるための1個の第二駆動源83と、第一駆動源20および第二駆動源43,83の各駆動を制御する1個の制御装置90を備える。容器10は、ここでは、好適に、「シリンジ」を用いることができる。また、多方活栓42および多方活栓82は、好適に、それぞれ、「三方活栓」および「四方活栓」を用いることができる。
【0035】
図2に示す多方活栓切換フローシステム1において、図1に示す多方活栓切換フローシステム1と異なる主な点は、各容器10に個別に接続される多方活栓切換装置40,40,80を備える点と、三方活栓以外に四方活栓を採用している点と、吸着カラム30を備えていない点と、制御装置90が複数の第二駆動源43,43,83を制御している点と、多方活栓42,82に容器70を接続していない点である。
【0036】
第一駆動源20は、各容器10に1個ずつ用意され、制御装置90による制御の下、容器10内の流体15の送りと戻しの双方向に駆動する。第二駆動源43および第二駆動源83は、それぞれ、多方活栓切換装置40および多方活栓切換装置80に組み込まれており、制御装置90による制御の下、流路切換操作部41および流路切換操作部81をそれぞれ回動する動作を行う。第一駆動源20および第二駆動源43,83は、ここでは、好適に、ステッピングモータを用いることができる。
【0037】
各容器10と多方活栓42,82との間は、それぞれ、チューブ25にて接続されている。また、多方活栓42,82の下流側には、それぞれ1個の容器60が接続される。多方活栓42,82において、容器60およびチューブ25を接続していない残りの管路は、チューブ45にて接続されている。なお、多方活栓42,82をチューブ45で接続せずに、ルアーロック方式等によって、多方活栓42,82同士を直接に接続するようにしても良い。図2に示すように、多方活栓82は四方活栓であり、容器60およびチューブ25を接続していない管路は、2本存在する。当該2本の管路は、各多方活栓42の1本の管路に、チューブ25を介してそれぞれ接続される。なお、多方活栓42,82の使用していない管路の口が生じる場合、汚染防止の観点からその口をキャップ等によって塞ぐのが好ましい。
【0038】
このような構成の多方活栓切換フローシステム1を用いることにより、例えば、各容器10内の流体15を2種類および3種類混合しあるいは反応させて、その結果物(混合物または反応物)を容器60に収集することができる。この多方活栓切換フローシステム1では、容器10の数と多方活栓切換装置40,82の数を同一にする他、異なるようにしても良い。
【0039】
第一駆動源20は、正逆両方向に流体15を送るように駆動可能である場合において、少なくとも1つの容器10内の流体15をその容器10内に戻す方向から多方活栓42,82に向けて送る方向に第一駆動源20の駆動方向を切り換えた直後、制御装置90は、第一駆動源20の駆動動作と容器10内の流体15を送る動作とが正確に応答できる分あるいはそれ以上、流体15を当該送る方向に移動させる向きに第一駆動源20を駆動するようにしても良い。
【0040】
流体15に液体を用いた場合において、制御装置90は、少なくとも1つの容器10の下流側に接続されるチューブ25内の流体15中に存在する気体を容器10内に戻すために、第一駆動源20を逆方向に駆動するようにしても良い。一方、流体15に気体を用いた場合には、その拡散を防止するため、容器10はチューブ25を介さず、直接、多方活栓42,82に接続するのが好ましい。加えて、多方活栓42,82の下流側に種々のカラムを接続するようにしても良い。
【0041】
2.システムの応用例
以下、図3〜図8に基づいて、本発明の実施の形態に係る多方活栓切換フローシステム1の応用例を説明する。
【0042】
図3は、多方活栓切換フローシステム1の具体的な構成を示す平面図である。図4は、図3に示す多方活栓切換フローシステム1において、各シリンジから流体を送るあるいは戻す動作を行うための機構例を示す図である。
【0043】
この多方活栓切換フローシステム1は、プラスミノーゲンを採取するのに応用したものであり、本体100と、吸着カラム200と、多方活栓切換装置300とを備えている。多方活栓切換装置300には、多方活栓の一例である三方活栓302が着脱可能に取り付けられる。三方活栓302において吸着カラム200と接続していない残りの2方向の管路には、それぞれ、多方活栓切換フローシステム1の構成外である採取用シリンジ450および廃液容器500を着脱可能に取り付けることができる。ここで、採取用シリンジ450に代えて、採取バイアルを採用することもできる。採取バイアルを用いる場合には、滅菌済みのバイアル瓶の口にゴム栓を付け、当該ゴム栓に刺した管を三方活栓302と接続するのが好ましい。採取用シリンジ450および廃液容器500の接続に関しては、後述する。以下、本体100、吸着カラム200、多方活栓切換装置300、採取用シリンジ450および廃液容器500について、その構成等を説明する。
【0044】
(1)本体
本体100は、容器の一例である2本のシリンジ(第一容器、第二容器)110,110および1本のシリンジ(第三容器)120、第一駆動源の一例である3個のステッピングモータ160,160,160および制御装置の一例である制御コントローラ190を備えている。シリンジ110,110内には、それぞれ、生理食塩水および血液(又は血漿)が入れられる。シリンジ120内には、トラネキサム酸が入れられる。ただし、これは、流体の一例にすぎず、他の流体を入れるようにしても良い。
【0045】
シリンジ110,110は、内部に空間を有する外筒体111,111と、その外筒体111,111の空間内に略密接するように挿入され、当該空間の容積を増減するように挿脱両方向に移動可能なピストン114,114とを備えている。外筒体111,111は、開口部と反対側の先端に、上記空間に連接する穴を有する突起部112,112を有する。また、外筒体111,111の開口部には、その開口部の径方向に広がるフランジ113,113を有する。ピストン114,114は、外筒体111,111と反対側の端部に、その端部の径方向に広がるフランジ115,115を備える。シリンジ120は、その径がシリンジ110の径より小さい点が異なるだけで、他の構造は、シリンジ110と同様である。シリンジ120は、先端に突起部122を有しその反対側にフランジ123を有する外筒体121と、外筒体121と反対側の端部にその端部の径方向に広がるフランジ125を有するピストン124を備えている。
【0046】
本体100における図面表方向の面(表面)には、2本のシリンジ110,110および1本のシリンジ120を固定する構成部を備えている。具体的には、以下の構成部が備えられている。本体の一方の角に寄った領域に、表面から突出する略直方体のブロック170,171,172,173が取り付けられている。ブロック170とブロック171とは、図面上下方向に隙間をあけて取り付けられている。また、ブロック172とブロック173も、図面上下方向にほぼ同じ隙間をあけて取り付けられている。また、ブロック170とブロック172、およびブロック171とブロック173は、それぞれ、シリンジ110の外筒体111の径よりわずかに大きな幅を離して配置されている。さらに、ブロック170とブロック171、およびブロック172とブロック173は、それぞれ、外筒体111のフランジ113の厚さよりわずかに大きな幅を離して配置されている。このため、シリンジ110の外筒体111をブロック170とブロック172の間に挿入し、外筒体111のフランジ113をブロック170とブロック171の間およびブロック172とブロック173の間に挿入することによって、シリンジ110を本体100に強く固定することができる。
【0047】
また、ブロック170とブロック172の本体100表面から突出する高さは、シリンジ110の径と同じ若しくはそれ以上の長さに設計されている。加えて、ブロック172の表面には、ブロック170方向に伸びるプレートであって、図中の矢印Aで示すようにブロック172を支点としてシリンジ110側に回動可能なプレート174を備えている。このため、シリンジ110をブロック170とブロック172の間に挿入した後、プレート174をシリンジ110側に回動することにより、シリンジ110をさらに確実に固定でき、シリンジ110の誤脱を低減することができる。
【0048】
上述のシリンジ110の図面右隣には、上述と同じタイプのシリンジ110をもう1本固定するためのブロック170、ブロック171、ブロック172、ブロック173およびプレート174が取り付けられているが、上記の構成と共通するので、その説明を省略し、図面からもその符号を省略する。
【0049】
さらにその右隣の領域には、シリンジ120を固定するためのブロック180,181,182,183が取り付けられている。プレート184は、ブロック182に回動可能に取り付けられている。ブロック180,181,182,183の形態は、上述のブロック170,171,172,173とそれぞれ同一の形態である。ブロック180とブロック182、およびブロック181とブロック183は、シリンジ120の外筒体121の径に合うような幅を離して配置されている。また、ブロック180とブロック181の間、およびブロック182とブロック183の間は、それぞれ、フランジ123の厚さよりわずかに大きな幅を離して配置されている。このため、シリンジ120も、シリンジ110と同様、本体100の表面に強く固定することができる。
【0050】
本体100の表面であって、各シリンジ110,110,120を構成するピストン114,114,124の直下には、各ピストン114,114,124の移動方向に長い貫通穴130,130,140が形成されている。各貫通穴130,130,140の表面には、それぞれ、ピストン駆動部140,140,150が、本体100の内部の部材と連接され、貫通穴130,130,140から抜けないように配置されている。ピストン駆動部140,140,150は、略板状であってその左右両端を、所定の隙間をあけるようにシリンジ110,110,120側に折り返し、その折り返した両部分の間隔がフランジ115,115,125の径より小さくしている。また、上記所定の隙間は、フランジ115,115,125の厚さよりわずかに大きく設計されている。このため、フランジ115,115,125は、本体100の表面上方からピストン駆動部140,140,150に挿入されると、ピストン114,114,124の移動方向には抜けず、かつピストン駆動部140,140,150に強く固定される。この結果、ピストン114,114,124は、図中の矢印Bで示す方向にまっすぐ移動でき、その結果、外筒体111,111,121の内部をスムーズに移動できる。
【0051】
本体100の内部には、ピストン駆動部140,140,150を矢印Bで示す正逆両方向に駆動するためのステッピングモータ160,160,160が配置されている。ステッピングモータ160,160,160が個別に駆動制御されることにより、各シリンジ110,110,120内の流体を個別に送る動作あるいは戻す動作を実現できる。ピストン駆動部140,140,150がステッピングモータ160,160,160の回転によって移動するための構成については、後述する。
【0052】
本体100には、3本のシリンジ110,110,120に加えて、操作面を本体100の表面に露出させた形態にて、制御コントローラ190が配置されている。制御コントローラ190は、ステッピングモータ160,160,160に加え、多方活栓切換装置300に取り付けられる三方活栓302の流路を切り換え可能に駆動する第二駆動源(後述する)を駆動制御するための装置である。制御コントローラ190は、ステッピングモータ160,160,160および第二駆動源と電気的に接続されている。当該接続は、有線であるか無線であるかを問わない。
【0053】
制御コントローラ190は、ステッピングモータ160,160,160および第二駆動源を、予めユーザがセットしたプログラムに従って駆動制御する他、このシステム1の各処理ステップ毎に、マニュアル操作を行うこともできる。制御コントローラ190は、その操作面に、表示部191、条件設定用表示部192、ステップ移行あるいは制御対象の選択等に用いる各種キー193を含む。その他に、点灯あるいは点滅表示も存在する。
【0054】
図4に示すように、シリンジ110を構成するピストン114は、ピストン駆動部140に固定された状態で外筒体111の内部空間を挿脱両方向に移動可能である。ピストン駆動部140は、ピストン114と反対側の端部に突部141を有している。その突部141は、連結部材142を介して、シリンジ110の方向に長いスクリュー143に接続されている。スクリュー143は、ステッピングモータ160の回転(または回動)に対応して回転(または回動)するギア162と噛み合っており、ギア162が回転(または回動)したときに、スクリュー143の長さ方向に移動する。このため、図4に示すように、ギア162が矢印F方向に回転(または回動)すると、スクリュー143が矢印G方向に移動し、ピストン114が矢印A方向に移動する。
【0055】
ここで、ギア162とスクリュー143の噛み合っている部分には、わずかに隙間があるため、ギア162の回転(または回動)方向を切り換えた際に、ギア162が回転(または回動)してもスクリュー143が移動しない「遊び」が生じ得る。供給に正確性を要求する流体の場合には、上記「遊び」が存在すると、制御コントローラ190にて設定した条件通りにその流体を供給できなくなる危険性がある。そこで、ギア162の回転(または回動)方向を、流体を戻す方向から送る方向に切り換えた直後に、上記「遊び」の距離あるいはそれ以上、送る方向にステッピングモータ160を回転(または回動)させ、上記「遊び」の距離を完全にゼロ、あるいはゼロに極めて近い状態にして停止するようにしている。この動作によって、次の送る動作の際には、ギア162の回転(または回動)にすぐに対応してスクリュー143が移動するので、流体を正確に送ることができる。これは、流体を戻す操作を行う場合にも同様であり、ステッピングモータ160を、流体を送る方向から戻す方向に切り換え、戻す動作を正確に行いたい場合には、駆動方向の切り換え直後に、戻す方向に「遊び」の距離あるいはそれ以上、ステッピングモータ160を回転させる。上記のような「遊び」の距離を減らす処理動作を行うか否かは、制御コントローラ190において選択できるようにし、あるいは選択不能に予め設定するようにしても良い。
【0056】
また、ステッピングモータ160を正逆両方向に回転(または回動)できるようにするメリットは、特に、次の点である。シリンジ110より下流側のチューブ(例えば、チューブ116)内の流体(ここでは、液体)aに気体bが存在する場合、当該気体bを除外しないと、流体aを正確に送ることが困難となる。そこで、気体bを、シリンジ110内に戻して外筒体111内の空間の上方に貯留できるようにする必要がある。ステッピングモータ160を双方向に回転(または回動)させると、図4に示すように、流体aを矢印H方向に移動することができるので、気体bをシリンジ110内に貯留させる処理を容易に行うことができる。
【0057】
(2)吸着カラム
吸着カラム200は、上流側および下流側に突出端部201を1個ずつ備えており、当該突出端部201を介して外部に通じる空間202をその内部に有する。この実施の形態では、上記空間202に、吸着材210が入れられている(図3中において、カッコ書きにて符号を付す)。この実施の形態では、吸着材210は、プラスミノーゲンを吸着する機能を有するものであれば、いかなるものでも良い。好適な吸着材としては、例えば、リジンセファロースに代表されるような多糖、親水性ビニルポリマーあるいはこれらの担体にプラスミノーゲンとの結合性の高い物質が担持された材料等を挙げることができる。ただし、プラスミノーゲンを吸着する目的以外で吸着カラム200を使用する場合には、上記材料以外の吸着材210を使用することができる。
【0058】
吸着カラム200の上流側は、シリンジ110,110,120とチューブ116,116,126およびチューブ127を介して接続される。具体的には、シリンジ110,110,120の各突起部112,112,122には、それぞれチューブ116,116,126の一端が接続され、チューブ116,116,126の他端は、接続分岐部材等を介して1本のチューブ127の一端に接続される。当該チューブ127の他端は、吸着カラム200の上流側の突出端部201に接続される。一方、吸着カラム200の下流側の突出端部201は、三方活栓302にチューブ220を介して接続される。これによって、各シリンジ110,110,120からの流体は、吸着カラム200を経由して、三方活栓302に導入することができる。
【0059】
(3)多方活栓切換装置
図5は、多方活栓切換装置300を図3の上方向(吸着カラム200から三方活栓302を見たときに左側の方向)から見た分解側面図である。図6は、三方活栓302の流路を切り換えるために回動する回動部材306をグリップし、かつ三方活栓302の活栓本体307を強くグリップする構造を説明するための図である。図6において、回動部材306および活栓本体307は一点鎖線で示している。図7は、三方活栓302の流路切換の制御を説明するための図である。
【0060】
多方活栓切換装置300は、略直方体の外形を有しており、3階建ての構造を備える。多方活栓切換装置300の1階に相当する空間には、第二駆動源の一例である1個のステッピングモータ420が格納される。ステッピングモータ420は、2階の天井に相当する部分に固定されて、宙吊りの状態で多方活栓切換装置300の1階に相当する空間に格納される。多方活栓切換装置300の2階に相当する空間には、ステッピングモータ420の回動動作を制御する2個のスイッチ360,370と、ステッピングモータ420の回転軸430に接続され、三方活栓302の回動部材306を把持する4本の把持柱状部390,391,392,393(図6参照、図5には把持柱状部390,391のみ示されている。)を備えるクランプ350がそれぞれ格納される。スイッチ360,370は、2階の床(あるいは1階の天井)に相当する第一仕切板400に固定される。クランプ350は、第一仕切板400を1階から2階の方向に貫通突出する回転軸430の回転に従動して回転できるように、底部にある軸穴352に回転軸430を挿入した状態にて固定され、第一仕切板400上に配置される。
【0061】
多方活栓切換装置300の3階に相当する空間には、多方活栓切換装置300から着脱自在な三方活栓302が配置されている。三方活栓302は、互いに略90度間隔で平面上にて放射状に突出する3つの管303,304,305と、当該3つの管303,304,305の交差部分にある活栓本体307の一端にあって流体の流路を切り換えるために回転軸308を中心に回動可能な回動部材306とを備える。回動部材306は、四方に突起を有する。三方活栓302は、多方活栓切換装置300の2階に相当する空間と3階に相当する空間とを仕切る第二仕切板380の方向に回動部材306が向き、多方活栓切換装置300の天板310の方向に活栓本体307の他端が向くように、逆さの状態で固定される。この結果、図5に示すように、管303は図5の正面から見て右側に、管304は図5の正面から見て背面側(従って図5に表示されていない)に、管305は図5の正面から見て左側に向く。
【0062】
第二仕切板380は、クランプ350の上方に略円形の貫通穴381を有する。クランプ350上の4本の把持柱状部390,391,392,393は、多方活栓切換装置300の2階に相当する空間から3階に相当する空間の方向に向かって貫通穴381を貫通して突出し、三方活栓302の回動部材306を把持する。具体的には、把持柱状部390,391,392,393は、回動部材306の4つの突起の各付け根部分(へこんだ部分)に配置され、回動部材306をグリップする。各把持柱状部390,391,392,393同士の間隔および各把持柱状部390,391,392,393の長さは、回動部材306の各突起の付け根部分において回動部材306をグリップできるように設計されている。
【0063】
一方、天板310には、回動部材306と反対側から活栓本体307を把持し、その活栓本体307が回動部材306の回動に従動しないように活栓本体307を固定するための4本の固定脚部330,331,332,333が固定されている(図6参照、図5には固定脚部330,331のみ示されている。)。各固定脚部330,331,332,333同士の間隔および各固定脚部330,331,332,333の長さは、活栓本体307と各管303,304,305の各付け根部分において活栓本体307を固定できるように設計されている。このように、多方活栓切換装置300は、固定脚部330,331,332,333によって活栓本体307を固定させた状態で、クランプ350はステッピングモータ420の回動動作に基づき、スイッチ360,370による制御の下で回動部材306を回動させることができる。
【0064】
天板310は、図7に示すように、略正方形の広い面を有する薄い板であり、三方活栓302の三方に突出する各管303,304,305の方向において、それぞれ、内方にU字形状に窪む凹部311,312,313を有する。凹部311,312,313は、管303,304,305にチューブ等を接続しあるいは取り外す作業を行いやすくするために設けられている。三方活栓302は、多方活栓切換装置300の上方から見て中央からずれた位置に配置される。このため、凹部311,312の形状を、凹部313の形状に比べて深く切り込むようにし、管303,304にチューブ等を着脱容易にしている。
【0065】
天板310は、対角の2箇所に、天板310を第二仕切板380にボルト止めするために設けられた各1個のボルト貫通穴310a,310b(図5参照)を有する。また、図5において、ボルト貫通穴310a,310bの各隣、および天板310の他の角部の合計4箇所に、天板310を第二仕切板380および第一仕切板400にねじ止めにて固定するための各1個のねじ貫通穴310f,310d,310c,310eが設けられている。ボルト貫通穴310a,310bの内径の方がねじ貫通穴310f,310d,310c,310eの内径よりも大きい。また、図5および図7に示すように、天板310の裏側であって当該天板310の対角の2箇所には、五角柱形状の柱部材324,325が配置される。柱部材324には、その各天面から各裏面に向けて貫通するボルト貫通穴335およびねじ穴336が形成されている。ボルト貫通穴335は、天板310のボルト貫通穴310aと略同じ内径のボルト貫通穴であり、ねじ穴336は、天板310のねじ貫通穴310fと略同じ内径のねじ穴である。柱部材325にも、ボルト貫通穴335およびねじ穴336とそれぞれ同様のボルト貫通穴334およびねじ穴338が形成されている。ボルト貫通穴334は、天板310のボルト貫通穴310bと略同じ内径のボルト貫通穴であり、ねじ穴338は、天板310のねじ貫通穴310dと略同じ内径のねじ穴である。柱部材324,325のボルト貫通穴335,334およびねじ穴336,338は、柱部材324,325を天板310の正面側左角および背面側右角にそれぞれ配置した状態において天板310のボルト貫通穴310a,310bおよびねじ貫通穴310f,310dの各位置にそれぞれ一致するように、柱部材324,325に形成されている。
【0066】
第一仕切板400は、図5に示すように、ねじ穴406,408を有する。また、第一仕切板400の対角の2角には、それぞれ1個のねじ穴407,409を有する。第一仕切板400のねじ穴406,407,408,409は、天板310のねじ貫通穴310f,310c,310d,310eと垂直方向ほぼ一直線になる位置に形成されている。図5において、第一仕切板400の右側面および左側面には、第一仕切板400の内方に向かって各2個のねじ穴410,411およびねじ穴412,413が形成されている。ねじ穴410,411,412,413は、第一仕切板400を角筒341にねじ止めするための穴である。
【0067】
図5に示すように、第一仕切板400の平面上の中心からわずかにずれた位置には、ステッピングモータ420の回転軸430が貫通する貫通穴402が形成されている。また、貫通穴402の周囲であって第一仕切板400の裏面側には、貫通穴402より大径の円柱状の溝401が形成されている。溝401は、ステッピングモータ420の回転軸430の周囲の部分をはめ込むためのものである。
【0068】
第二仕切板380は、図5に示すように、対角の2角に、それぞれ1個のボルト用ねじ穴384,385を有する。図5におけるボルト用ねじ穴385の右側、第二仕切板380の正面に向かって右角、ボルト用ねじ穴384の左側および第二仕切板380の背面側左角には、それぞれ、ねじ穴386,387,388,389が形成されている。ボルト用ねじ穴385,384およびねじ穴386,387,388,389は、第二仕切板380において、天板310のボルト貫通穴310a,310bおよびねじ貫通穴310f,310c,310d,310eと垂直方向一直線になる位置に形成されている。ボルト貫通穴310a,310bの内径は、ねじ貫通穴310f,310c,310d,310eの内径に比べて大きい。図5において、第二仕切板380の右側面および左側面には、第二仕切板380の内方に向かって各2個のねじ穴380a,380bおよびねじ穴380c,380dが形成されている。ねじ穴380a,380b,380c,380dは、第二仕切板380を角筒341にねじ止めするための穴である。第二仕切板380の平面上の中心からずれた位置には、第一仕切板400に形成された貫通穴402と同心円になるように、円形の貫通穴381が形成されている。貫通穴381は、クランプ350上の4本の把持柱状部390,391,392,393が貫通でき、クランプ350の回転に支障のない大きさで形成されている。
【0069】
ボルト315は、その先端のみにねじ山部分315aを有する。ボルト315は、天板310および柱部材324に形成された各2箇所のボルト貫通穴310a,335を順に貫通し、第二仕切板380の各ボルト用ねじ穴385にねじ止めされる。ボルト314もボルト315と同じ形態であって、その先端のみにねじ山部分314aを有し、天板310および柱部材325に形成された各2箇所のボルト貫通穴310b,334を順に貫通し、第二仕切板380の各ボルト用ねじ穴384にねじ止めされる。ねじ316は、天板310のねじ貫通穴310fを貫通し、柱部材324のねじ穴336にねじ込まれて貫通し、第二仕切板380に形成されたねじ穴386にねじ込まれて貫通し、第一仕切板400に形成されたねじ穴406にてねじ止めされる。ねじ318は、天板310のねじ貫通穴310dを貫通し、柱部材325のねじ穴338にねじ込まれて貫通し、第二仕切板380に形成されたねじ穴388にねじ込まれて貫通し、第一仕切板400に形成されたねじ穴408にてねじ止めされる。ねじ317は、その直下が空間であるため、天板310の角に形成された1本のねじ貫通穴310cのみを貫通し、第二仕切板380に形成されたねじ穴387にねじ込まれて貫通し、第一仕切板400に形成されたねじ穴407にてねじ止めされる。ねじ319は、その直下が空間であるため、天板310の背面側左角に形成された1本のねじ貫通穴310eのみを貫通し、第二仕切板380に形成されたねじ穴389にねじ込まれて貫通し、第一仕切板400に形成されたねじ穴409にてねじ止めされる。
【0070】
このように、天板310と第二仕切板380とは、その両角において柱部材324,325を挟んだ状態でボルト315,314およびねじ316,318にて固定されるため、天板310と第二仕切板380は強固に結合される。さらに、天板310、第二仕切板380および第一仕切板400は、ねじ316,317,318,319によってねじ止めされるので、これら310,380,400が一体的に強固に結合される。
【0071】
図5に示すように、多方活栓切換装置300の1階および2階の領域の周囲は、正方形の開口部を有する角筒341にて覆われている。また、角筒341の底部(すなわち、多方活栓切換装置300の1階の床に相当する部分)は、図5に示すように、角筒341と溶接される底板345にて覆われている。第一仕切板400および第二仕切板380は、角筒341の開口内部と同じか若しくはわずかに小さい大きさの板である。
【0072】
天板310には、4本のねじ320,321,322,323をねじ込み可能な4個のねじ穴310g,310h,310i,310j(図5参照)が貫通して形成されている。ねじ穴310g,310h,310i,310jは、略正方形の角の位置になるように配置されている。ねじ320,321,322,323は、天板310の厚さより長い。このため、ねじ320,321,322,323を、それぞれねじ穴310g,310h,310i,310jに最大限ねじ込んだ状態では、ねじ320,321,322,323の各先端から一部の長さが突き抜けている。ねじ320,321,322,323の突き抜けた部分は、筒体(チューブ)によって着脱自在に覆われている。このように、固定脚部330,331,332,333は、当該筒体とねじ320,321,322,323を主要部としている。三方活栓302の活栓本体307を固定脚部330,331,332,333によりしっかりと固定するために、筒体の材料および肉厚を選択することができる。活栓本体307と固定脚部330,331,332,333との隙間を低減し、かつ活栓本体307と固定脚部330,331,332,333との間で滑らないようにするためには、ゴムのように柔軟性に富みかつ摩擦係数の高い材料で、ねじ320,321,322,323の外周と活栓本体307との隙間を十分に埋めることができる厚さを有する筒体を選択するのが好ましい。また、ゴムよりも硬度の高い樹脂(例えば、フッ素樹脂)から成る筒の外表面にゴムをコートした多層構造の筒体を選択することもできる。
【0073】
図5および図7に示すように、多方活栓切換装置300の2階に相当する空間には、2個のスイッチ360,370が配置されている。スイッチ360,370は、ステッピングモータ420の回転に従動するクランプ350の外側の領域において上方から見て左右ほぼ一直線になる位置にて、第一仕切板400上に固定されている。スイッチ360,370は、クランプ350の回動動作の妨げにならない位置に、第一仕切板400の裏面から固定される。
【0074】
図7に示すように、スイッチ360は、略直方体の形状を有しており、その長さ方向に並ぶ接続端子361,362,363を備えている。接続端子361,362,363と反対側の面において、接続端子362の真後には、スイッチ360の内方に押し込み可能であって、突出する向きに復元可能に付勢される凸部364が存在する。スイッチ370は、スイッチ360と同様に略直方体の形状を有しており、その長さ方向に並ぶ接続端子371,372,373を備えている。接続端子371,372,373と反対側の面において、接続端子372の真後には、スイッチ370の内方に押し込み可能であって、突出する向きに復元可能に付勢される凸部374が存在する。スイッチ360の各接続端子361,362,363およびスイッチ370の各接続端子371,372,373は、ステッピングモータ420を駆動する回路(不図示)に接続されている。
【0075】
スイッチ360は、多方活栓切換装置300の図7に示す上方側に接続端子361,362,363が突出する向きで固定される。スイッチ370も同様に、当該上方側に接続端子371,372,373が突出する向きで固定される。クランプ350は、その中心からクランプ350の径方向外側に向かって伸びる一本の押圧部材351を備える。押圧部材351は、その長さ方向の一端にねじ部を有し、クランプ本体350aの側面に形成された複数のねじ穴357,358等の一つにねじ込んで固定可能である(図6参照)。押圧部材351の長さは、スイッチ360,370の凸部364,374に届く長さである。押圧部材351は、クランプ350と一体的に回動する。図7の右方向を角度ゼロとした場合において、押圧部材351の先端が角度ゼロの方向を向いているときには、押圧部材351がスイッチ370の凸部374をスイッチ370の内方に向けて押し込んでいる。この際、ステッピングモータ420は停止状態である。この状態からステッピングモータ420が回転して、クランプ350が180度回転すると、押圧部材351は、図7の状態から時計の針の回転方向と同方向に回転する(図7の矢印I方向に回転する)。その後、押圧部材351は、スイッチ360の凸部364をその内方に押し込む。これにより、ステッピングモータ420は停止する。逆に、押圧部材351は、スイッチ360の位置から時計の針の回転方向と逆方向に回転すると、スイッチ370の凸部374をその内方に押し込んで、ステッピングモータ420は停止する。このように、ステッピングモータ420の停止は、押圧部材351による凸部364または凸部374の押し込みをトリガとして実行される。
【0076】
把持柱状部390,391,392,393は、それぞれ、略クロス形状の回動部材306の隣接する突起同士の間の凹部に接触した状態で回動部材306をグリップする。各把持柱状部390,391,392,393に囲まれた第一領域396に存在する柱状部394の先端にある凸部395は、回動部材306の下面に接触、あるいは下面の凹部にはまり込んでいる。一方、固定脚部330,331,332,333は、第二領域342に活栓本体307を挿入した状態で活栓本体307の側面を強くグリップする。このため、クランプ350の回動に従動して回動部材306が回動しても、活栓本体307は回動しない。なお、活栓本体307の上端部は、天板310に接触している。活栓本体307の上端部に内方に窪む凹部(多角形の底面を有する凹部が好ましい)が存在する場合には、天板310の裏面に当該凹部にきつく挿入可能な凸部を備えるのが好ましい。活栓本体307の回動をさらに抑制できるからである。
【0077】
(4)その他(システム外の採取用シリンジおよび廃液容器)
図3に示すように、採取用シリンジ450は、上述のシリンジ110とほぼ同じ形態を有する。採取用シリンジ450の一端には、突起部462が形成されており、内部空間に連通する穴を有する。突起部462は、不図示の除菌フィルタを介して、点線Dで示すように管305に接合される。採取用シリンジ450は、トラネキサム酸により吸着カラム200から分離したプラスミノーゲンを回収する容器である。
【0078】
また、廃液容器500は、その一端側に突起部501を有し、その突起部501を通る穴から内部の空間に廃液を入れる容器である。突起部501にはチューブ550の一端が接続され、点線Eで示すように、チューブ550の他端が管304に接続される。三方活栓302の流路の切り換えにより、吸着カラム200を通った流体は、廃液容器500および採取用シリンジ450に振り分けられる。
【0079】
次に、多方活栓切換フローシステム1の動作の流れを、図8に基づいて説明する。
【0080】
生理食塩水50mlを充填したシリンジ110、血液30mlを充填したシリンジ110および10%トラネキサム酸(以後、トラネキサム酸という。)10mlを充填したシリンジ120を、空気だまりが上になるように、本体100にセットする。続いて、三方活栓302を多方活栓切換装置300にセットする。次に、各シリンジ110,110,120と吸着カラム200、および吸着カラム200と三方活栓302とをそれぞれ接続する。続いて、三方活栓302の管304側に廃液容器500を取り付けると共に、管305側に除菌フィルタを介して、プラスミノーゲンの採取に用いられる採取用シリンジ450を接続し、フィルタ付きエアー針を立てる。各接続に緩みがないことを確認して、多方活栓切換フローシステム1の組み立てを完了する。
【0081】
次に、制御コントローラ190を用いて、各シリンジ110,110,120内の流体を正方向に送る際の流速および送液時間をセットする(具体的な条件については、具体的な処理の説明において言及する。)。続いて、三方活栓302の流路切り換えのタイミングについてセットする。各流体の逆送によって空気を各シリンジ110,110,120に戻す操作については、この実施の形態では空気を観察しながらマニュアルで操作する選択をする。そして、当該マニュアル操作が終了すると、元のプログラムに戻るようなプログラムを設定する。こうして、制御コントローラ190を用いたプログラミングを完了すると、以下の流れで各処理が進行する。
【0082】
図8は、上記のセッティングの後の多方活栓切換フローシステム1における各処理の流れを示すフローチャートの一例である。
【0083】
まず、ユーザの操作によって電源がオンになると(ステップS1010)、シリンジ110の一つに血液を入れているか血漿を入れているかの選択を要求する表示が行われる。ユーザが血液モードあるいは血漿モードのいずれかを選択すると(ステップS1020)、制御コントローラ190は、ユーザにより予め入力されたプログラムに従って、多方活栓切換装置300のステッピングモータ420を駆動して、吸着カラム200と廃液容器500を結ぶ流路のみが形成されるようにする(ステップS1030)。ここでは、血液モードを選択した場合について、以後の処理を説明する。この後、制御コントローラ190の操作面上において、生理食塩水の逆送をマニュアルにて行うことを促す表示がされる。ユーザが生理食塩水を毎分0.5mlで生理食塩水用のシリンジ110のピストン114を駆動するためのステッピングモータ160を逆転駆動し、空気を生理食塩水用のシリンジ110内に引き入れたことを確認したら、逆転駆動を停止する(ステップS1040)。なお、経路中に空気が存在しない場合あるいは経路にエアートラップを接続している場合には、必ずしもステップS1040のような逆送ステップを行わなくても良い。生理食塩水用のシリンジ110以外の他のシリンジ110,120における逆送ステップについても同様である。生理食塩水を引き込む流速(毎分0.5ml)については、予めプログラムにて設定されていても、ユーザが逆転駆動時に設定するようにしてもよい。
【0084】
次に、ユーザは、生理食塩水の正方向への送液の流量を10mlに、流速を毎分2mlに設定する(ステップS1050)。なお、流量と流速の少なくとも一方が予めプログラミング時に設定されていてもよい。流量と流速の両方が予め設定されている場合には、ステップS1050は、それら条件を確認するステップであってもよい。ステップS1050に続いて、マニュアルから自動制御プログラムに移行し、制御コントローラ190は、生理食塩水の正方向への送液を行う(ステップS1060)。この後、制御コントローラ190の操作面上において、血液の逆送をマニュアルにて行うことを促す表示がされる。ユーザが血液を毎分0.5mlで血液用のシリンジ110のピストン114を駆動するためのステッピングモータ160を逆転駆動する(ステップS1070)。血液を引き込む流速(毎分0.5ml)については、予めプログラムにて設定されていても、ユーザが逆転駆動時に設定するようにしてもよい。また、同様に、制御コントローラ190の操作面上において、トラネキサム酸の逆送をマニュアルにて行うことを促す表示がされる。ユーザがトラネキサム酸を毎分0.5mlでトラネキサム酸用のシリンジ120のピストン124を駆動するためのステッピングモータ160を逆転駆動する(ステップS1080)。トラネキサム酸を引き込む流速(毎分0.5ml)については、予めプログラムにて設定されていても、ユーザが逆転駆動時に設定するようにしてもよい。その後、空気を血液用のシリンジ110内およびトラネキサム酸用のシリンダ120内に引き入れたことを確認したら、逆転駆動を停止する(ステップS1090、ステップS1100)。
【0085】
ステップS1100まで進行した時点でマニュアルから自動制御プログラムに移行する。制御コントローラ190は、シリンジ120のピストン124を駆動するためのステッピングモータ160を正転駆動し、毎分0.5mlでトラネキサム酸0.2mlを送り、停止する(ステップS1110)。この送り量は、前述の「遊び」を十分に解消できる量である。その後、生理食塩水の送液が停止する(ステップS1120)。続いて、制御コントローラ190は、血液用のシリンジ110のピストン114を駆動するためのステッピングモータ160を正転駆動し、流量28ml、流速毎分0.5mlで血液を送る(ステップS1130)。これによって、プラスミノーゲンが吸着カラム200内の吸着材210に吸着する。制御コントローラ190は、血液を28ml送る時間、ステッピングモータ160を正転駆動した時点で停止する(ステップS1140)。次に、制御コントローラ190は、生理食塩水用のシリンジ110のピストン114を駆動するためのステッピングモータ160を正転駆動し、流量30ml、流速毎分1.0mlで生理食塩水を送る(ステップS1150)。この後、制御コントローラ190の操作面上において、血液の逆送をマニュアルにて行うことを促す表示がされる。ユーザが血液2.0mlを毎分1.0mlで逆送すべく、血液用のシリンジ110のピストン114を駆動するためのステッピングモータ160を逆転駆動する(ステップS1160)。血球の流出防止のためである。血液を引き込む流速(毎分1.0ml)については、予めプログラムにて設定されていても、ユーザが逆転駆動時に設定するようにしてもよい。
【0086】
続いて、制御コントローラ190は、生理食塩水30mlの送液が終了する時間になると、生理食塩水用のシリンジ110のピストン114を駆動するためのステッピングモータ160を停止する(ステップS1170)。次に、制御コントローラ190は、トラネキサム酸用のシリンジ120のピストン124を駆動するためのステッピングモータ160を正転駆動し、流量1.5ml、流速毎分0.5mlでトラネキサム酸を送る(ステップS1180)。この段階では、トラネキサム酸によるプラスミノーゲンの吸着材210からの分離効率が低いので、廃液容器500側に流す。ここで、ステップS1180において廃液容器500側に送るトラネキサム酸(ここでは、1.5ml)は、本システム1内の経路の構成、吸着カラム200内の充填容積、吸着材210等に合わせて、プラスミノーゲンの最適な回収量が得られるように設定することができる。トラネキサム酸を送液する流速(毎分0.5ml)については、予めプログラムにて設定されていても、ユーザが正転駆動時に設定するようにしてもよい。
【0087】
続いて、制御コントローラ190は、トラネキサム酸1.5mlの送液が終了する時間になると、トラネキサム酸用のシリンジ120のピストン124を駆動するためのステッピングモータ160を停止する(ステップS1190)。次に、制御コントローラ190は、多方活栓切換装置300のステッピングモータ420を駆動して、吸着カラム200と採取用シリンジ450を結ぶ流路に切り換える(ステップS1200)。続いて、制御コントローラ190は、トラネキサム酸用のシリンジ120のピストン124を駆動するためのステッピングモータ160を正転駆動し、流量2.0ml、流速毎分0.5mlでトラネキサム酸を送る(ステップS1210)。トラネキサム酸を送液する流速(毎分0.5ml)については、予めプログラムにて設定されていても、ユーザが正転駆動時に設定するようにしてもよい。ステップS1210の際には、吸着材210に吸着していたプラスミノーゲンの分離効率が高くなっているので、採取用シリンジ450にて採取している。
【0088】
続いて、制御コントローラ190は、トラネキサム酸2.0mlの送液が終了する時間になると、トラネキサム酸用のシリンジ120のピストン124を駆動するためのステッピングモータ160を停止する(ステップS1220)。制御コントローラ190の制御は、ここで終了する。最後に、採取用シリンジ450からエアー針を抜き、除菌フィルタを三方活栓302側からはずし(ステップS1230)、プラスミノーゲンの採取を完了する。その後、採取用シリンジ450は、蓋をして冷凍保存される。
【0089】
次に、採取終了後の手順について説明する。
【0090】
エアー針および除菌フィルタは、各先端をカバーして廃棄する。三方活栓302の管305側の開口部にキャップを付けて塞ぐ。次に、制御コントローラ190のマニュアル操作により三方活栓302の流路を切り換えて、吸着カラム200と廃液容器500とを結ぶ流路を開く。ステッピングモータ160を駆動して血液用のシリンジ110内の血液を廃液容器500内に高速で送液し、シリンジ110が空になった時点でステッピングモータ160を停止する。同時に、ステッピングモータ160を駆動してトラネキサム酸用のシリンジ120内のトラネキサム酸を廃液容器500内に高速で送液し、シリンジ120が空になった時点でステッピングモータ160を停止する。ステッピングモータ160の停止時には、アラームが鳴るようにすることもできる。また、これらの操作はマニュアルでも、制御コントローラ190のプログラムによる自動処理でもよい。自動処理の場合、ピストン114,124が限界まで移動したときのステッピングモータ160,160にかかる過負荷、あるいはピストン114,124の各先端の位置のセンサーによる検知等により、ステッピングモータ160,160を停止することができる。
【0091】
全ての廃液(少なくとも血液、トラネキサム酸を含む)を廃液容器500内に送り込んだ時点で、マニュアル操作にて三方活栓302の流路を切り換えて、廃液容器500側を閉にする。最後に、各シリンジ110,110,120および三方活栓302を外し、これらを廃棄する。このように、各シリンジ110,110,120および三方活栓302を廃棄できるので、次の処理の際に、汚染あるいは感染を防止できる。これをもって、プラスミノーゲン採取終了後の処理を終了する。
【0092】
図8に基づいて説明した上記各処理には、ユーザによるマニュアル操作が含まれているが、予め、送液あるいは逆送の流速および/または時間を決めることにより、全ての処理を制御コントローラ190による自動制御によって実行することができる。その場合、予め、ユーザが制御コントローラ190の操作面上の操作によってプログラミングし、あるいはデフォルトで組み込まれたプログラムをユーザが選択することにより、自動制御にてプラスミノーゲンの採取を実行できる。
【0093】
また、図8に基づいて説明した上記各処理の内で、制御コントローラ190による自動制御で行う処理については、その内の一部をユーザのマニュアル操作によって実行するようにしても良い。
【産業上の利用可能性】
【0094】
本発明の多方活栓切換フローシステムは、例えば、製剤、分析、薬剤投与等のように、複数の流体を送る方向を切り換える必要のある分野において利用可能である。
【図面の簡単な説明】
【0095】
【図1】図1は、本発明の好適な実施の形態に係る多方活栓切換フローシステムの一例を示す概略構成図である。
【図2】図2は、本発明の好適な実施の形態に係る多方活栓切換フローシステムの別の例を示す概略構成図である。
【図3】図3は、図1に示す多方活栓切換フローシステムの具体的な構成を示す平面図である。
【図4】図4は、図3に示す多方活栓切換フローシステムにおいて、各シリンジから流体を送るあるいは戻す動作を行うための機構例を示す図である。
【図5】図5は、図3に示す多方活栓切換装置を図3の上方向から見た分解側面図である。
【図6】図6は、図5に示す三方活栓の流路を切り換えるために回動する回動部材をグリップし、かつ三方活栓の活栓本体を強くグリップする構造を説明するための図である。
【図7】図7は、図5に示す三方活栓の流路切換の制御を説明するための図である。
【図8】図8は、図3に示す多方活栓切換フローシステムにおける各処理の流れを示すフローチャートの一例である。
【符号の説明】
【0096】
1 多方活栓切換フローシステム
10 容器(第一容器、第二容器、第三容器を含む)
15 流体(例えば、液体)
20 第一駆動源
25 チューブ
28 チューブ
30 吸着カラム
40 多方活栓切換装置
42 多方活栓
43 第二駆動源
50 制御装置
80 多方活栓切換装置
82 多方活栓
83 第二駆動源
90 制御装置
110 シリンジ(第一容器、第二容器)
120 シリンジ(第三容器)
160 ステッピングモータ(第一駆動源)
190 制御コントローラ(制御装置)
200 吸着カラム
302 三方活栓(多方活栓の一例)
a 流体
b 気体
【特許請求の範囲】
【請求項1】
複数の流体のフロー方向を制御するシステムであって、
流体を内部に充填し、外部にその流体を排出可能な複数の容器と、
上記複数の容器から送られる上記流体のフロー方向を複数パターンに切り換え可能な多方活栓を着脱可能に取り付けた1または複数の多方活栓切換装置と、
上記容器内の流体を上記多方活栓に向けて送る方向および当該方向と逆方向の内、少なくとも一方向に上記流体を送るための第一駆動源と、
上記多方活栓のフロー方向を切り換えるための第二駆動源と、
上記第一駆動源および上記第二駆動源の駆動を制御する制御装置と、
を備えることを特徴とする多方活栓切換フローシステム。
【請求項2】
前記容器から前記流体を送る下流側の経路中に、前記容器内の前記流体の構成要素を吸着させる吸着カラムを配置していることを特徴とする請求項1に記載の多方活栓切換フローシステム。
【請求項3】
前記複数の容器から前記多方活栓装置までの経路を、各容器内の前記流体を合流して前記多方活栓に送るように構成していることを特徴とする請求項1または2に記載の多方活栓切換フローシステム。
【請求項4】
前記第一駆動源は、正逆両方向に前記流体を送るように駆動可能であって、
少なくとも1つの前記容器内の前記流体を前記容器内に戻す方向から前記多方活栓に向けて送る方向に、前記第一駆動源の駆動方向を切り換えた直後に、前記制御装置は、前記第一駆動源の駆動動作と前記容器内の前記流体を送る動作とが正確に応答できる分あるいはそれ以上、前記流体を当該送る方向に移動させる向きに前記第一駆動源を駆動することを特徴とする請求項1から3のいずれか1項に記載の多方活栓切換フローシステム。
【請求項5】
前記流体は液体であり、
前記制御装置は、少なくとも1つの前記容器の下流側の上記液体中に存在する気体を前記容器内に戻すために、前記第一駆動源を前記逆方向に駆動することを特徴とする請求項1から4のいずれか1項に記載の多方活栓切換フローシステム。
【請求項6】
前記複数の容器は、生理食塩水を入れた第一容器、血液若しくは血漿を入れた第二容器、上記血液若しくは上記血漿中の特定の成分と結合可能な溶液を入れた第三容器を含み、
前記第一駆動源は、上記第一容器、上記第二容器および上記第三容器内の各液体を、前記多方活栓に送る方向および当該送る方向と逆方向の双方向に送ることができるように個別に駆動可能であって、
前記吸着カラムは、上記特定の成分を吸着可能なカラムであって、
前記制御装置は、上記第一容器から上記生理食塩水を前記多方活栓に向けて送り、その後、上記第二容器から上記血液若しくは上記血漿を前記多方活栓に向けて送り、その後、前記多方活栓を切り換え、その後、上記第三容器からその中の溶液を前記多方活栓に向けて送るように、前記第一駆動源の駆動を制御することを特徴とする請求項2に記載の多方活栓切換フローシステム。
【請求項1】
複数の流体のフロー方向を制御するシステムであって、
流体を内部に充填し、外部にその流体を排出可能な複数の容器と、
上記複数の容器から送られる上記流体のフロー方向を複数パターンに切り換え可能な多方活栓を着脱可能に取り付けた1または複数の多方活栓切換装置と、
上記容器内の流体を上記多方活栓に向けて送る方向および当該方向と逆方向の内、少なくとも一方向に上記流体を送るための第一駆動源と、
上記多方活栓のフロー方向を切り換えるための第二駆動源と、
上記第一駆動源および上記第二駆動源の駆動を制御する制御装置と、
を備えることを特徴とする多方活栓切換フローシステム。
【請求項2】
前記容器から前記流体を送る下流側の経路中に、前記容器内の前記流体の構成要素を吸着させる吸着カラムを配置していることを特徴とする請求項1に記載の多方活栓切換フローシステム。
【請求項3】
前記複数の容器から前記多方活栓装置までの経路を、各容器内の前記流体を合流して前記多方活栓に送るように構成していることを特徴とする請求項1または2に記載の多方活栓切換フローシステム。
【請求項4】
前記第一駆動源は、正逆両方向に前記流体を送るように駆動可能であって、
少なくとも1つの前記容器内の前記流体を前記容器内に戻す方向から前記多方活栓に向けて送る方向に、前記第一駆動源の駆動方向を切り換えた直後に、前記制御装置は、前記第一駆動源の駆動動作と前記容器内の前記流体を送る動作とが正確に応答できる分あるいはそれ以上、前記流体を当該送る方向に移動させる向きに前記第一駆動源を駆動することを特徴とする請求項1から3のいずれか1項に記載の多方活栓切換フローシステム。
【請求項5】
前記流体は液体であり、
前記制御装置は、少なくとも1つの前記容器の下流側の上記液体中に存在する気体を前記容器内に戻すために、前記第一駆動源を前記逆方向に駆動することを特徴とする請求項1から4のいずれか1項に記載の多方活栓切換フローシステム。
【請求項6】
前記複数の容器は、生理食塩水を入れた第一容器、血液若しくは血漿を入れた第二容器、上記血液若しくは上記血漿中の特定の成分と結合可能な溶液を入れた第三容器を含み、
前記第一駆動源は、上記第一容器、上記第二容器および上記第三容器内の各液体を、前記多方活栓に送る方向および当該送る方向と逆方向の双方向に送ることができるように個別に駆動可能であって、
前記吸着カラムは、上記特定の成分を吸着可能なカラムであって、
前記制御装置は、上記第一容器から上記生理食塩水を前記多方活栓に向けて送り、その後、上記第二容器から上記血液若しくは上記血漿を前記多方活栓に向けて送り、その後、前記多方活栓を切り換え、その後、上記第三容器からその中の溶液を前記多方活栓に向けて送るように、前記第一駆動源の駆動を制御することを特徴とする請求項2に記載の多方活栓切換フローシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−94183(P2010−94183A)
【公開日】平成22年4月30日(2010.4.30)
【国際特許分類】
【出願番号】特願2008−265567(P2008−265567)
【出願日】平成20年10月14日(2008.10.14)
【出願人】(508206690)バイオ・サーチ・メディカル・テクノロジー横浜株式会社 (2)
【Fターム(参考)】
【公開日】平成22年4月30日(2010.4.30)
【国際特許分類】
【出願日】平成20年10月14日(2008.10.14)
【出願人】(508206690)バイオ・サーチ・メディカル・テクノロジー横浜株式会社 (2)
【Fターム(参考)】
[ Back to top ]