
多極子測定装置
【課題】 荷電粒子線装置の収差を補正する収差補正器のテーブルデータを容易に取得できる多極子測定装置を提供する。
【解決手段】 光学系10と収差補正器11が挿入されるスペースと位置検出器7とを備えた多極子測定装置において、複数の点で行った一次荷電粒子線の収差補正器6への入射位置および角度と位置検出器7上での照射位置と多極子の関係について多極子場を励起した状態および励起しない状態で測定することにより、多極子場を励起した状態に含まれる多極子成分を抽出する。
【解決手段】 光学系10と収差補正器11が挿入されるスペースと位置検出器7とを備えた多極子測定装置において、複数の点で行った一次荷電粒子線の収差補正器6への入射位置および角度と位置検出器7上での照射位置と多極子の関係について多極子場を励起した状態および励起しない状態で測定することにより、多極子場を励起した状態に含まれる多極子成分を抽出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、荷電粒子線装置の収差補正器を調整するための多極子測定装置に関する。
【背景技術】
【0002】
走査型電子顕微鏡(SEM)や透過型電子顕微鏡(TEM)などの電子顕微鏡をはじめとする荷電粒子線装置では、荷電粒子ビームを集束するため電場若しくは磁場を用いたレンズが使用される。電場若しくは磁場レンズでは、各種収差が不可避的に発生する。したがって、縮小率を高くして荷電粒子ビーム線を絞ろうとしても、収差が大きくてはスポット径を小さくできず、微細構造の観察や寸法測定精度の向上ができない。
【0003】
荷電粒子線装置では、分解能を向上するために、収差補正器の導入が進められている。この収差補正器は、多段に設置された多極子レンズにより構成され、多極子レンズ内に電場ないし磁場を発生することにより、収差を除去する。収差には複数の種類があり、収差の種類に応じて適切な多極子場の設定が必要となっている。
【0004】
収差補正器に関しては、例えば、以下の非特許文献1に開示されているように、12極子レンズを4段用いたものがある。非特許文献1の収差補正器においては、収差補正方法として、収差の種類に応じた多極子場の調整方法が記述されている。
【0005】
収差と補正量の関係に関しては、非特許文献2もしくは特許文献1に開示されている。ここでは理想的な条件下において、計算から収差と多極子場組み合わせの関係を導き出している。また特許文献1では、収差補正器において収差を測定し、これを補正する技術も開示されている。この技術は、フォーカスを変えて取得した複数枚の画像からビームプロファイルデータを取得し、取得したビームプロファイルデータに基づいて各種幾何収差の収差量を求め、求めた収差量に応じて収差補正器へ入力する補正量を決定して、各種収差を除去している。
【0006】
しかし、これらの収差測定は、試料にビームをフォーカスした状態あるいはフォーカスした状態を基準にわずかにずらした状態で行う必要があるが、収差の影響を受けるためビームフォーカスした状態の維持は崩れやすく、収差測定可能な状態となる前段階の調整が必要である。この調整は手順を繰り返す必要があり、調整時間が問題となっていた。また、これらの測定では、1段分の1種類の多極子場などの特定の要素のみを大きくするとフォーカス状態が維持できなくなるため、要素毎の測定が困難である。そういった測定が困難であるために、非特許文献2の方法が考案された。
【0007】
あらかじめの収差と補正量の関係の規定において、補正器における多極子の機械的な位置ズレなどの理想状態からのズレを考慮して補正する場合を想定する。この場合、収差補正を行うと、さらに補正に伴い副次的に発生する収差(寄生収差)が発生するため、その抑制が必要となる。この寄生収差を抑えるには、主目的の補正場のほかに補助的な多極子場を励起する。したがって、より高度な調整を想定するとき、収差と補正量の関係は、理想的な多極子場と補正量の関係の測定に加えて、さらに補助的な多極子場の組み合わせの測定も必要で、その測定にかかる時間が問題となっていた。また、収差量は光学条件に依存するため、光学条件毎に収差と補正量の関係を調べることが必要となり、条件分だけ時間がかかる。
【0008】
上記、収差と補正量の関係の測定においてはさらに、寄生収差が大きい場合、ビームが測定範囲外に外れ測定ができなくなるという欠点があり、これを回避するためには細かいステップで繰り返す必要があり、手順が煩雑になる。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2005−183086号公報
【非特許文献】
【0010】
【非特許文献1】Nuclear Instruments and Methods in Physics Research、A363(1995)、第316〜325頁
【非特許文献2】Optik 116巻、9号、第438−448頁
【発明の概要】
【発明が解決しようとする課題】
【0011】
収差補正器の本格的な運用の前段階において、入力値(電圧や電流およびその配分)の強度に対して励起される多極子場の強度の関係、多極子場の強度に対して必要となる調整場の関係などを記したテーブルデータ取得を行う。ここでは、誤差因子として、極子の製作上の位置ズレや、入力値に対する多極子場の強度(入力値に対する応答特性)の差などによって生じる設計上の想定と実際の観察との差を確認・記録し、さらに多極子場において本来意図する効果とは別に発生する収差(寄生収差)を抑えるため調整場の組み合わせと強度を記録する。この測定は収差補正器をとりつけた電子顕微鏡上で行うが、走査型の電子顕微鏡での観察は十分にプローブを絞った状態(2次電子を利用する場合)にする必要があるため、複数の段の多極子場を連動して動作させる必要があり、多極子場の励起を1段分だけ行うといった要素に切り分けが困難である。要素毎に切り分けられないと条件毎にそれぞれ異なるテーブルデータが必要となるため、装置に要求される膨大な観察条件の数のテーブルデータ取得には煩雑な手間や時間がかかり、未測定の条件への対応ができず運用に制限が生じる。
【0012】
さらに、上記電子顕微鏡でプローブを絞った状態の観察においては、わずかな変化にも敏感なため検出感度が高いものの、多極子場励起の誤差として偏向場が大きく含まれている場合はプローブを絞るための対物レンズから外れて観察できなくなるなど大きな変化に弱く、テーブルデータ取得時の測定にも制限がある。したがって、比較的小さいステップで多極子場強度を変化させてテーブルデータを取得する必要があり時間がかかる。
【0013】
本発明の目的は、収差補正器のテーブルデータを容易に取得できる多極子測定装置を提供することにある。これにより、短期間で収差補正器の調整が可能となり、収差補正器の量産化が可能となる。
【課題を解決するための手段】
【0014】
本発明は収差補正器の多極子場特性を測定する装置を提供する。本装置では、荷電粒子線を収束レンズと収差補正器に通過させ、通過した荷電粒子線を蛍光板等の観察板に照射し、観察板上で照射される位置や照射された荷電粒子線のビームプロファイルの観察を行う。収差補収束レンズと収差補正器の間には偏向器が備えられ、荷電粒子線の収差補正器に対する入射位置と角度を制御することができる。
【0015】
収差補正器に任意の多極子場を励起すると、多極子場の種類と大きさおよび荷電粒子線の多極子場への入射位置と角度の設定パラメータによって、荷電粒子線の観察板上の照射位置とビームプロファイルが原理的に変化する。また、荷電粒子線の観察板上の照射位置とビームプロファイルはこれらの設定パラメータなどの原理的な因子以外にも、極子の位置ズレと入力される電圧や電流に対する応答特性といった誤差因子によって変化する。本発明は、上記設定パラメータを変更して、観察板上の照射位置を測定し、多極子場励起時の誤差因子を打ち消すテーブルを算出する。
【発明の効果】
【0016】
本発明の装置によって収差補正器の多極子場特性を調べることができ、電子顕微鏡等の荷電粒子線装置へ搭載する前に収差補正器のスクリーニングが可能になる。また、荷電粒子線を直接観察することができるため、2次電子を利用する場合と比べて細かい調整や制限が不要となり、検査とテーブル作成を容易かつ高速に行える。さらに単一の段といった要素に限定して調べることができるため、課題の切り分けや汎用性の高いデータ取得が可能になる。同じ装置で複数の収差補正器を検査できるため、安定した条件で検査でき、品質の向上に繋がる。
【図面の簡単な説明】
【0017】
【図1】第1の実施例に係る多極子測定装置の全体構成概略図である。
【図2A】図1に示す多極子測定装置内における電子ビームの軌道を説明するための装置模式図である。
【図2B】図1に示す多極子測定装置内における電子ビームの軌道を説明するための装置模式図である。
【図2C】図1に示す多極子測定装置内における電子ビームの軌道を説明するための装置模式図である。
【図2D】図1に示す多極子測定装置内における電子ビームの軌道を説明するための装置模式図である。
【図3A】図1に示す多極子測定装置の観察板上における電子ビームの照射点の軌跡の一例を示す説明図である。
【図3B】図1に示す多極子測定装置の観察板上における電子ビームの照射点の軌跡の他の例を示す説明図である。
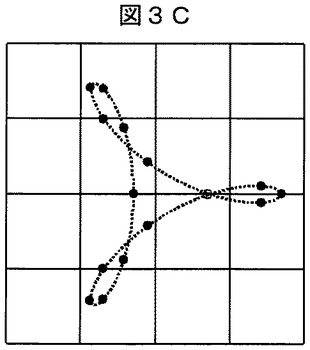
【図3C】図1に示す多極子測定装置の観察板上における電子ビームの照射点の軌跡の他の例を示す説明図である。
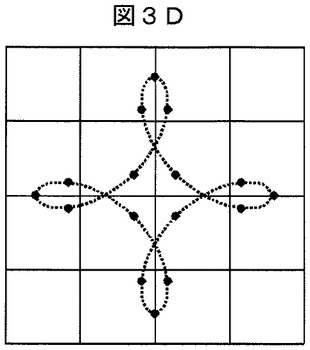
【図3D】図1に示す多極子測定装置の観察板上における電子ビームの照射点の軌跡の他の例を示す説明図である。
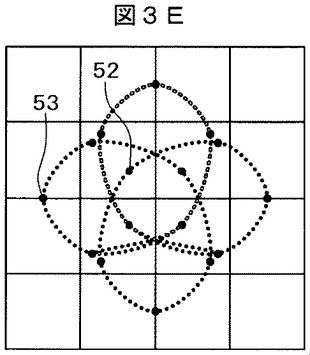
【図3E】図1に示す多極子測定装置の観察板上における電子ビームの照射点の軌跡の他の例を示す説明図である。
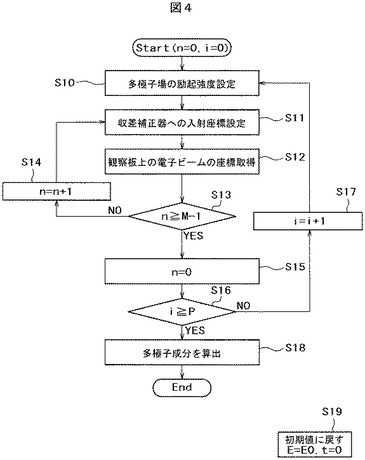
【図4】図1に示す多極子測定装置を用いて多極子場を測定するときのフローチャートである。
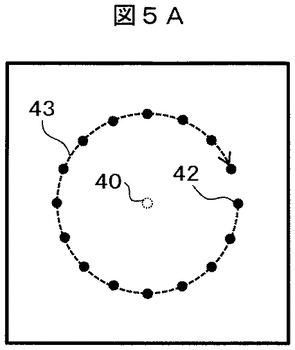
【図5A】図1に示す多極子測定装置を用いて多極子場を測定するときの多極子への入射電子ビームの偏向パターンの一例を示した説明図である。
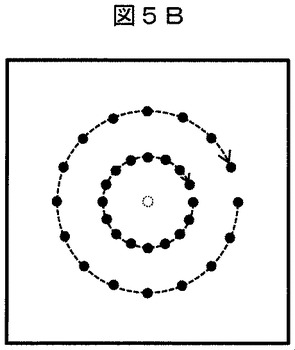
【図5B】図1に示す多極子測定装置を用いて多極子場を測定するときの多極子への入射電子ビームの偏向パターンの他の例を示した説明図である。
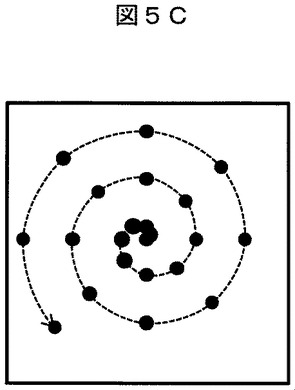
【図5C】図1に示す多極子測定装置を用いて多極子場を測定するときの多極子への入射電子ビームの偏向パターンの他の例を示した説明図である。
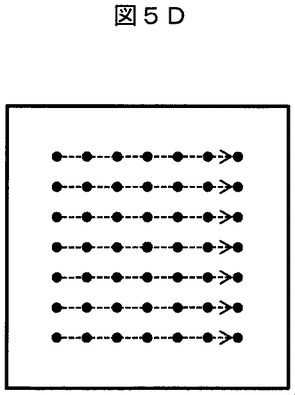
【図5D】図1に示す多極子測定装置を用いて多極子場を測定するときの多極子への入射電子ビームの偏向パターンの他の例を示した説明図である。
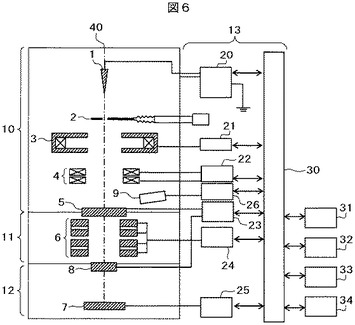
【図6】第1の実施例に係る多極子測定装置の他の例を示す全体構成概略図である。
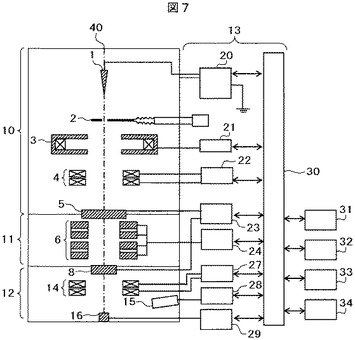
【図7】第1の実施例に係る多極子測定装置の他の例を示す全体構成概略図である。
【発明を実施するための形態】
【0018】
以下、実施例として4−8極型収差補正器で本装置を利用した例を用いて説明する。
【実施例1】
【0019】
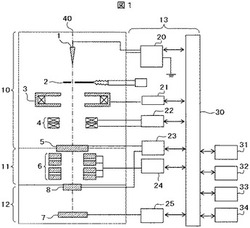
図1に本発明の第1の実施例に係る多極子測定装置の全体構成の概略図を示す。構成は、大まかに、電子ビームを照射と偏向を行う電子銃カラム10、収差補正器が格納される収差補正器カラム11、観察板が格納される観察室12、各構成部品を制御するための制御ユニット13により構成されている。制御ユニット13には、更に、調整量やずれ量を算出する演算装置31や、装置と装置ユーザとのマン・マシンインタフェースとなる操作卓32、取得情報を表示するモニタ33、所定の情報を格納するための記憶部34が接続されている。操作卓32は、例えば、キーボードやマウスなどの情報入力手段により構成される。
【0020】
はじめに、電子銃カラム10、収差補正器カラム11、観察室12の構成要素について説明する。電子銃カラム10、収差補正器カラム11、観察室12は連結され、内部を真空にして、一体の装置として動作するが、収差補正器カラム11を別の収差補正器と交換できるよう切り離すことができる。切り離す場合には、真空バルブ5と真空バルブ8が閉じられ、電子銃カラム10と観察室12の真空を維持する。電子銃1は電子銃電源20により電子ビームを所定の電圧で放出させ、放出された電子ビームは、光軸40に沿って後段の構成要素へ入射する。電子ビームは可動絞り2にてビーム電流を制限され、コンデンサーレンズ3で集束され、偏向器4、収差補正器6を通り、観察板7へ照射される。動作中、真空バルブ制御ユニット23によって真空バルブ5と真空バルブ8は解放され、電子銃1から観察板7までに電子ビームを遮るものはない。偏向器4は偏向器電源22を通じて制御コンピュータ30と接続され、制御コンピュータ30により任意の大きさ、向き、タイミングで偏向を行うことができる。符号21はコンデンサーレンズ電源である。
【0021】
収差補正器カラム11内の収差補正器6は4段の12極子を持ち、各極子は収差補正器電源24と接続され、極子それぞれについて任意の大きさの電界もしくは磁界あるいは電界と磁界の両方を発生することができる。12極子は収差補正器電源24の12極子への入力値の組み合わせにより、電界もしくは磁界の2極子場、4極子場、6極子場、8極子場といった多極子場を形成可能である。多極子場は重畳して形成することも可能であり、その大きさや種類、位相、どの段で行うかは収差補正器電源24と接続された制御コンピュータ30によって決定される。
【0022】
観察室12内部の観察板7は、観察板7上に照射される電子ビームの電流量と位置が検出され、検出された情報はイメージングユニット25によって制御コンピュータ30に送られる。なお、同一符号は同一構成要素を示す。
【0023】
次に、本多極子測定装置の動作の説明をする。動作は大きく分けて、軸確認(調整)、多極子場の測定、多極子場の調整値(補助場)算出に分けられる。なお、本実施例では個別の記述は省略するが、多極子の励起状態の再現性を上げるために磁界を用いる多極子は励磁強度を変える場合はデガウス動作を行っても良い。また、本実施例は加速電圧一定の条件で行っている。実際の測定では使用する加速電圧すべてについて同様の測定を行う。
【0024】
軸確認を説明する。軸確認は偏向器4によって電子ビーム41(図2A等参照)を収差補正器6上で光軸40に平行に2次元スキャンすることで行う。まず、収差補正器6で多極子場を励起しない状態(もしくは任意の値)で偏向器4によって2次元スキャンを行い、2次元スキャン中の偏向器4の入力値と観察板7上で観察される位置の関係を記録する。次に、収差補正器6で一つの多極子場の入力値の強度を変更し、再度2次元スキャンを行い、2次元スキャン中の偏向器4の入力値と観察板7上で観察される位置の関係を記録する。多極子場の軸を通る電子ビームは多極子場の励起強度によらず同じ位置になるため、多極子場の変更前後を比較して、2次元スキャン中の偏向器4の入力値に対する観察板7上で観察される位置の変化が最も少ない地点を軸の位置として検出できる。
【0025】
本軸確認は偏向器4による2次元スキャンを光軸40に平行にして行ったが、座標を特定できれば傾けて調べる方法もある。また、高速かつ高精度に軸の位置を調べる方法として、2次元スキャン中のサンプリング数を一定と仮定した場合、はじめに広い領域で粗く2次元スキャンし、次に動きが最も少ない領域を中心として徐々にスキャン領域を狭めていく方法もある。
【0026】
本軸確認はどの多極子に対しても適用可能であるが、多極子場測定における軸の設定としては、主として軌道を形成するのに用いる4極子を基準として行うことが望ましい。ただし、通常、軸の位置は4段それぞれで異なる位置になり、多極子場測定はそれぞれの段毎に設定した軸を基準にする。段毎の軸の位置の違いは記録され、SEMに収差補正器6を組み、各段の軸調整をするときに必要な2極子場のオフセット量を見積もるのに利用できる。4極子の軸を基準にするのは同じ段であっても、多極子場によって軸の位置が異なる場合が多く、全ての軸を一致させることができないためである。したがって、4極子の軸と異なる軸の位置を持つ多極子に対しては、多極子場測定において2極子成分として取り扱う。
【0027】
多極子場測定を説明する。本実施例での多極子場測定は、軸確認を行った後、偏向器4によって電子ビーム41を前述の軸確認で得られた軸に対して軸のまわりを回転して収差補正器6を通過させ、その時の観察板7で電子ビーム41の位置を検出し、検出された位置と収差補正器6への入射位置の関係を調べることで行う。
【0028】
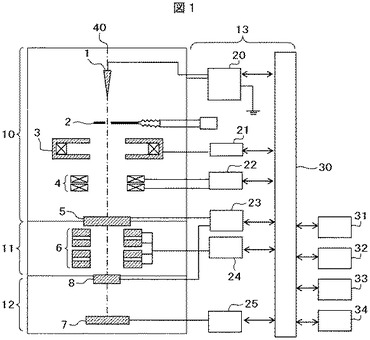
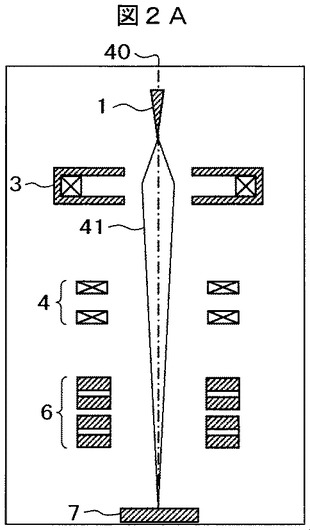
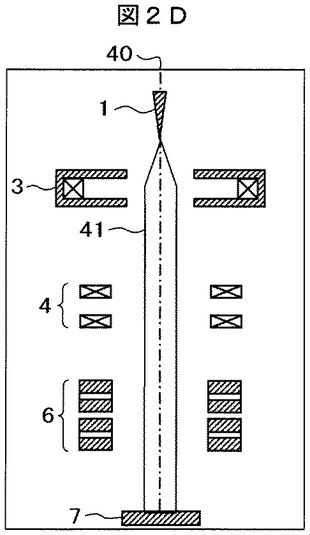
電子ビーム41の回転について、図2A〜図2Dに示す多極子測定装置の模式図を用いて説明する。本例では軸確認で確認された軸の位置が光軸40に一致しているものとする。図2Aは電子ビーム41の回転前の状態で、コンデンサーレンズ3によって電子ビーム41が観察板7で収束されている。電子ビーム41の回転はこの状態から、図2Bに示すように光軸40から平行に一定の半径rの距離を保って収差補正器6に入射するように偏向器4を調整する。
【0029】
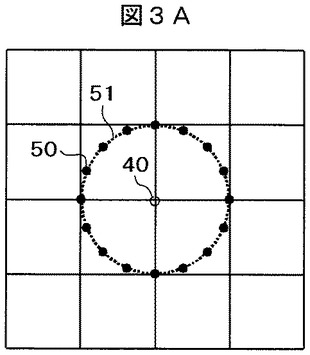
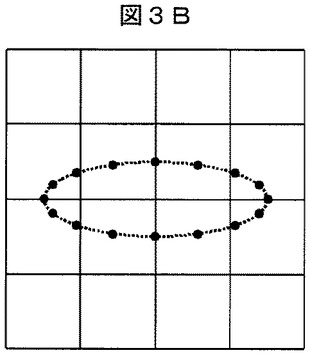
各多極子場測定で得られる結果の例として、電子ビーム41は偏向器4で回転され、収差補正器6で励起する多極子場の影響を受けて、観察板7上で図3A〜図3Eに示すように観察され、モニタ33に出力することができる。図3A〜図3Eでは観察板7の電子ビーム41の照射点50を例として示し、電子ビーム41の回転に伴う電子ビームの照射点の移動を軌跡51で示している。ここでは多極子場がない場合を図3A、4極子場の影響を受けたものを図3B、6極子の影響を受けたものを図3C、8極子の影響を受けたものを図3Dに示している。さらに8極子の強度を強めたものとして図3Eを示している。これらの形状は収差補正器6の多極子場の作用と収差補正器6への電子ビーム41入射の関係で決定される。なお、図3Eにおける符号52は電子ビームのプロファイル内部の照射点、符号53は電子ビームのプロファイル外周部の照射点である。
【0030】
図4を用いて多極子場測定フローを説明する。ここでは電子ビーム41が軸から半径rの円周上を等間隔にM点で一周する。また多極子場の強度を0からΔTずつP+1回変化し、ΔT×Pまで変化して測定している。本例ではカウンタとして任意の整数n、iを使用する。
ステップS10:制御コンピュータ30により収差補正器電源24を制御して、収差補正器6の多極子場の励起強度をΔT×iに設定する。
ステップS11:制御コンピュータ30により偏向器4を制御して収差補正器6の多極子場への入射座標を設定する。収差補正器6への入射座標(xni、yni)は式(1)で表される。
【0031】
【数1】

【0032】
入射座標(xni、yni)は、偏向器電源22への電流もしくは電圧などの入力値から計算できる。
ステップS12:観察板7上の電子ビーム41の照射座標(Xni、Yni)を取得する。検出される電子ビームの照射座標はイメージングユニット25によって制御コンピュータ30に送られ、ステップS11で設定した電子ビームの入射座標と同期されて記憶部34に記録される。
ステップS13:カウンタnを用いて規定の動作(M点移動)を終えたか判断する。終えている場合はステップS15へ、終えてない場合はステップS14の処理に進む。8極子成分までを抽出するにはMは6以上が必要で、計算のしやすさのために2のべき乗であることが望ましい。
ステップS14:カウンタnに1をプラスし、再度ステップS11に戻る。
ステップS15:カウンタnをリセットして0に戻す。
ステップS16:カウンタiを用いて規定の動作(多極子強度の変更)を終えたか判断する。終えている場合はステップS18へ、終えてない場合はステップS17の処理に進む。
ステップS17:カウンタiに1をプラスし、再度ステップS10に戻る。
ステップS18:記憶部34に格納した入射座標(xni、yni)と照射座標(Xni、Yni)の関係から強度ΔT×iについて多極子成分((Dc、Ds)、(Qc、Qs)、(Hc、Hs)、(Oc、Os))iを算出する。多極子成分はDc:2極子コサイン成分、Ds:2極子サイン成分、Qc:4極子コサイン成分、Qs:4極子サイン成分、Hc:6極子コサイン成分、Hs:6極子サイン成分、Oc:8極子コサイン成分、Os:8極子サイン成分を現す。算出の仕方は後述する。
【0033】
上記ステップS11、ステップS12およびステップS18に関して、収差補正器6の多極子の配置と電子ビーム41の座標と観察板7上の座標はあらかじめ校正しておき、得られる調整テーブルデータの座標系と収差補正器6の機械的な位置関係を対応づけて管理する。これにより、収差補正器6を電子顕微鏡に組み込む際には、収差補正器6の多極子位置を参照することで、調整テーブルの座標系と電子顕微鏡装置の座標系との校正が容易になる。
【0034】
本例では多極子場の測定は一つの多極子場についてのみ記述した。実際の測定は、収差補正器6の4段多極子全ての段でそれぞれ多極子場を単独に励起して測定する。それらの手順は多極子場によらず同じである。ここで測定するそれぞれの多極子場は、2極子場、4極子場、6極子場、8極子場をさし、さらに各々の多極子場はコサイン分布とサイン分布の2種類について測定する。また磁場と電場の多極子はそれぞれ異なる種類の多極子場としてそれぞれ測定する。なお、ステップS19は初期値に戻す処理を示す。
【0035】
次にステップS18の多極子成分の算出の仕方について説明する。算出は、照射座標(Xni、Yni)をnの関数とみなしてx座標およびy座標それぞれについてフーリエ級数展開することで、多極子成分を算出できる。ただし、4極子場成分については、ビーム回転成分の除去を行う必要がある。なお各多極子成分は、多極子の位置と観察板7までの距離に比例して変わるため、相対的な指標である。各成分((Dc、Ds)、(Qc、Qs)、(Hc、Hs)、(Oc、Os))iと照射座標(Xni、Yni)の関係は回転成分を(Rc、Rs)として式(2−1)、式(2−2)で記述できる。
【0036】
【数2】
【0037】
(R成分の初期位相を0と仮定した場合Rs=0)算出された値は、各成分の強度と入射条件、多極子と観察板までの距離で変わるため、相対指標として利用する。ただし、厳密に校正すれば絶対値として測定に利用することも可能である。
【0038】
測定結果から調整量の算出について説明する。調整量の算出は、多極子wを(w=2、4、6、8。それぞれコサインとサイン分布)仮定したとき、w極子強度の入力値の強度awに対し補助場として入力値に対する係数kwjで定義した補助的な多極場成分((kw2c、kw2s)、(kw4c、kw4s)、(kw6c、kw6s)、(kw8c、kw8s))の励起の組み合わせを算出することである。w極子場の入力値の強度をawとした場合、実際の多極子場として出力されるj極子場成分(j=2c、2s、4s、4c、6c、6s、8c、8s。cはコサイン、sはサイン)(例j=2cなら2極子コサイン成分Dc)の強度をbwjとすると次式となる。
【0039】
【数3】
【0040】
bwwはw極子励起に対して本来意図した多極場成分であるため主成分と呼び、それ以外を副成分と呼ぶこととする。調整は多極子励起にとって副成分が0となればよく、w極子場の出力値cjとしたときj≠wについてcj=0を満たせばよい。ここで調整のために補助成分としてw極子強度の入力値の強度awに対して((kw2c、kw2s)、(kw4c、kw4s)、(kw6c、kw6s)、(kw8c、kw8s))の組み合わせを加える(kjj=1)。具体例として4極子場コサイン分布(w=4c)の励起を行う場合、式(4)を満たすよう多極成分を補助場として加える。
【0041】
【数4】
【0042】
ただし、条件によっては解がないことや現実的には有効でない解もある。例えば主成分C4cが0に近づく場合は有効な解でない。これらを回避するために係数には閾値を設定し、その範囲内で入力値に対して主成分が最も大きくなる条件、もしくは副成分に対する主成分の比率が最大になる条件を選択する。また、副成分に対する主成分の比率が基準を満たさない場合は、性能が不十分として収差補正器の選別に利用できる。
【0043】
上記係数の算出においてさらに簡素化した例として、w極子場励起する場合の補助場について、補助場n極子場中の多極成分bnjは補助場の主成分bnnと副成分bnwのみ考慮しそれ以外はbnj=0とみなして処理する。具体例として4極子場コサイン分布(w=4c)の励起を行う場合、式(4)を式(5−1)として計算する。なお、式(5−1)のgは、式(5−2)で示される。
【0044】
【数5】
【0045】
上記算出における係数の組は、入力値である任意の多極子場の強度を変えて取得する。実際の多極子場においては、ヒステリシスや長時間安定性の問題などにより微小な調整値は無意味になることもあり、主成分の影響が大半であることから本簡素化は実用上有効である。
【0046】
副成分がゼロとなる調整量を算出し、求められた値をテーブル化することにより、収差補正器を荷電粒子線装置に取り付けた際、容易に調整することが可能となる。調整量の算出や得られた値のテーブル化は演算装置31により行なうことができる。
【0047】
多極子場の成分測定では、収差補正器6への入射位置に対する観察板7上の照射位置の関係を用いている。これは、図3A〜図3Eで得られる軌跡に対する近似式の算出に用いるフーリエ級数展開を計算しやすくするために、位相情報として利用する。
【0048】
観察板7における電子ビーム41の照射位置検出の補足事項として、照射位置において電子ビームは広がりを持ち一点に収束されない場合がある。このような場合は、電子ビームの広がりの重心位置や、ノイズフィルタをかけた後に輝度最大となる位置などを利用する。また広がりそのものを防ぐには、測定における軸からの回転半径rに対して、収差補正器6の入射位置における電子ビームの広がりを相対的に小さくすることである。
【0049】
観察板7における電子ビーム41の照射位置に関してさらに、帯電や電源安定性による電子ビームの照射点のドリフトが発生する場合がある。ドリフトに関しては測定時間を考慮して、数分までの短時間の安定性と数時間までの長時間の安定性に分かれる。また安定性は位置検出の必要精度に対して影響するかどうかで判定する。本実施例における測定の時間は全体として数時間以内を想定しており、個別の動作として図4のフローのステップS10からステップS15までの任意の励起状態における座標取得1セットを1分以内と想定している。ドリフトの影響は、ドリフト前後の同一条件での電子ビーム照射位置を比較することで確認できる。多極子を励起している場合など完全に同じ条件にできない状態でも電子ビーム41の入射位置を軸の位置に設定することで確認できる。またステップS10においてその都度軸確認と再調整を行っても良い。したがって数分以上の長時間安定性に関しては、測定動作にドリフト確認を付加することで対応できる。短時間安定性に関しては電源への要求仕様に盛り込むことで対応する。本測定における電子ビームサイズもしくは位置精度を数ミクロンと想定しており、通常の電子顕微鏡よりもサイズが数桁大きいため、電子顕微鏡で通常用いる安定度の電源を使用すれば、ドリフトの影響は無視できる。
【0050】
以上で実施例の説明を一通り終えた。以下ではフローの個別の動作について代替方法の例を示す。
【0051】
多極子場の成分測定において、図2Dのように電子ビーム41を収束レンズ3によって観察板7上で収束させず広げ、偏向器4で収差補正器6の軸は合わせたまま電子ビーム41を回転させないで、観察板7上に照射される電子ビーム41で形成されるビームプロファイル形状から判断する手法もある。ビームプロファイルの形状は、図3A〜図3Eの電子ビームの照射点の軌跡に相当する。しかしながらこの手法では、電子ビームの移動を用いた測定の位相に相当する情報が得られない。また、図3Eの例など内部への折り返しがあるものについて、電子ビームの移動を用いた測定では、照射点52を含む軌跡や照射点を区別できるが、プロファイルの形状からは照射点53を通る外周部しか判断できず計算に十分な情報が得られない欠点があるなど適用範囲が限られる。
【0052】
多極子場の成分測定における偏向器4による電子ビーム41の移動に関して、本実施例では回転半径を固定して測定を行ったが、収差補正器6で発生させる多極子場強度によっては、電子ビーム41の観察板7上の照射位置が観察板7の観察可能領域を外れることがある。その場合は、偏向器4による電子ビーム41の回転半径を変えて、観察板7の観察可能領域内に収める。このとき各多極子成分の計算では回転半径変更を考慮した計算を行う。具体的には半径の大きさに対して4極成分は1次比例するが、8極成分は3次比例する。
【0053】
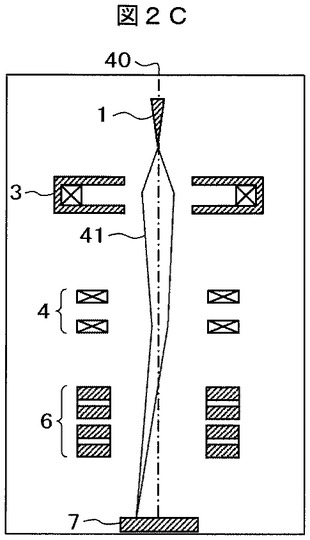
多極子場の成分測定における偏向器4による電子ビーム41の移動に関して、図2Bのように電子ビームが光軸40に対して平行に入射する場合について示したが、図2Cのように光軸40に対して一定の傾斜を加える方法もある。この場合は段毎に電子ビームの入射位置が変わるため、計算に入射位置のズレを考慮する必要がある。また、異なる条件で比較しているため、相対的な差を考慮するのに誤差が入らないよう注意が必要である。長所は偏向器4を1段偏向として動作することができ、2段偏向よりも動作が簡素化され、電流あたりの偏向量が比較して大きくできることである。
【0054】
多極子場の成分測定における偏向器4による電子ビーム41の移動に関して、例は円形パターンを示したが(図5A)、図5Bに示すような異なる半径の円形パターンの組み合わせや、図5Cに示すような螺旋パターン、図5Dに示すような2次元スキャンパターンなど電子ビーム41の収差補正器6への入射が軸を除いて8点以上の複数の異なる座標を含んでいればどのようなパターンでもよい。パターンは計算しやすさと精度に関わってくる。円形は単純であるため計算がしやすい。なお、符号42は電子ビーム入射点、符号43は電子ビーム入射点の軌跡である。
【0055】
多極子場の成分測定における偏向器4による電子ビーム41の移動に関して、観察板7上の照射点の座標位置から求めない方法として、軸以外の複数の入射位置について、多極子場励起時に観察板7で観察される照射位置が多極子場を励起しない場合の照射位置と一致するよう偏向器4の入力値を制御し、その値と励起しない場合に偏向器4に入力している値との差分を求め、差分から多極子成分を検出するものがある。長所は目視による打ち消しの確認が容易になることである。欠点は電子ビーム41の制御が必要となりその分だけ余計に時間がかかることである。
【0056】
得られた結果の利用の仕方として、単純に調整テーブルとして利用するだけでなく、収差補正器6をSEMに搭載した際に収差が最も小さくなる、あるいは調整量が最も少なくなる組み込みの選択に利用できる。これは、収差補正器6は非特許文献1にあるように、2、3段目にラインフォーカスを作るが、ラインフォーカスは方向によって感度が異なるため、軌道の方向がSEMで決定している場合、組み込む向きによって収差の影響が異なるためである。
【0057】
また本装置は、収差補正器6の多極子場の観察のみならず、図6に示すように、電子銃カラム10内に、二次電子検出器9を備え、偏向器4による2次元スキャンを行うことで、収差補正器6の最上部の多極子に対してSEM動作を行い、多極子形状の検査を行ってもよい。このとき真空バルブ5は収差補正器6の多極子を観察するのに十分な大きさを持たせる。なお、符号26は二次電子検出器電源である。
【0058】
さらに、本装置は真空計(図示せず)を備えることから、真空試験や、収差補正器電源による耐電圧試験も合わせて行うことができる。収差補正器6の大気から真空までの移行は真空バルブ5を閉じた状態で行われ、真空バルブ8を開いて試料室(観察室)12より真空引きする、もしくは、収差補正器カラム11に排気ポートを設け、真空バルブ8を閉じて電子銃カラム10と観察室12とは別の配管から真空引きをしても良い。装置の安定には電子銃カラム10の真空を保つことが重要である。
【0059】
観察板7の2次元位置検出器である2次元イメージセンサ具体例として、マイクロチャンネルプレート(MCP)、蛍光板とカメラの組み合わせがある。
また観察板7においてイメージセンサを用いない方法の例として、図7に示すように走査コイル14を配置した構成において、ファラデーカップなどの電子検出器16を用いて入射電子の面内の一点だけ電子を検出することで電子ビームの位置検出を行う方法がある。この方法では、電子ビーム41の回転動作時、図3A〜図3Eに示される照射点の各点において、短時間だけ回転動作などの電子ビーム41の移動を停止し、その状態で走査コイル14にてスキャン動作を行い、照射電子が電子検出器16を通過したときの信号がアンプ29で増幅されて制御コンピュータ30で検出され、同時に走査コイル14を駆動する電源27の電流もしくは電圧の値から位置を換算して検出する。また、電子検出器16を用いずに面内の一点だけを検出する手段として、観察板7上に一点だけ2次電子もしくは反射電子を放出しやすいパターンを用意し、放出された電子を図7の二次電子検出器15に取り込んで検出する手段もある。これらのイメージセンサを用いない方法は、用いる方法に比べて時間が余計にかかる。なお、符号28は二次電子検出器電源である。
【0060】
実施例の測定に追加して、本装置は、通常の収差補正器の使用条件である軌道形成を行った状態で、収差補正器の軌道調整に使用することができる。この状態では図2Dに示すようにコンデンサーレンズ3により電子ビーム41を光軸40と平行になるよう収差補正器6に入射し、図2Bにおける通常の測定同様に偏向器4で軸に平行に保ったまま入射位置を変更して、観察板7に照射される位置の観察を行う。本調整は、SEM搭載前の租調整および動作確認に位置づけられる。SEM観察を行わないため詳細な調整はできないが、大きなズレの調整が可能である。軌道調整は非特許文献1に準じ、偏向器4の入射位置に対して軸対称な位置に電子ビームが照射されること、4極子の増減に対してビームの移動が起きないこと(軸調整)、ラインクロス位置での2極子ワブラに対してビーム移動が起きないことが実行される。ここでは多極子成分の算出は行わない。なお、本調整において電子ビームは照射位置で収束されないため、照射位置算出には重心位置の計算などが用いられる。
【0061】
図1に示す多極子測定装置を用い、電子ビームの収差補正器に対する入射位置と角度を制御し、収差補正器に任意の多極子場を励起に応じて電子ビームの観察板上の照射位置の変化により多極子成分を抽出し、不要な多極子成分の打ち消し条件と入力に対する応答特性の測定を行い、入力値と出力場の関係と設定テーブルを算出し、それを用いて所定の装置に取り付けた当該収差補正器を調整したところ、従来1週間〜1ヶ月掛かっていた調整時間を数時間に短縮することができた。また、本装置によって収差補正器の多極子場特性を調べることができ、電子顕微鏡等の荷電粒子線装置へ搭載する前に収差補正器のスクリーニングが可能になる。また、荷電粒子線を直接観察することができるため、2次電子を利用する場合と比べて細かい調整や制限が不要となり、検査を高速に行なえ、また入力値(電圧や電流およびその配分)の強度に対して励起される多極子場の強度の関係、多極子場の強度に対して必要となる調整場の関係などを記したテーブル作成を容易かつ高速に行える。さらに単一の段といった要素に限定して調べることができるため、課題の切り分けや汎用性の高いデータ取得が可能になる。同じ装置で複数の収差補正器を検査できるため、安定した条件で検査でき、品質の向上に繋がる。また、収差補正器の量産化が可能となる。
【0062】
以上、本実施例によれば、収差補正器を通過した荷電粒子を直接検出する検出器(観察板、電子検出器等)を備えることにより、収差補正器のテーブルデータを容易に取得できる多極子測定装置を提供することができる。これにより、短期間で収差補正器の調整が可能となる。
【0063】
なお、本発明は上記した実施例に限定されるものではなく、様々な変形例が含まれる。例えば、上記した実施例は本発明を分かりやすく説明するために詳細に説明したものであり、必ずしも説明した全ての構成を備えるものに限定されるものではない。また、実施例の構成の一部について、他の構成の追加・削除・置換をすることが可能である。
【0064】
以上、本願発明を詳細に説明したが、以下に主な発明の形態を列挙する。
(1)一次荷電粒子線を照射する照射光学系と、
該一次荷電粒子線と照射される面上の位置座標を検出する2次元位置検出器と、
該位置検出器の検出面上に前記一次荷電粒子線を収束させる収束レンズと、
該収束レンズと前記2次元位置検出器との間に多段の多極子を持つ収差補正器を挿入するためのスペースと、
該スペースに挿入されたときの前記収差補正器に前記一次荷電粒子線が入射する位置および角度を制御する偏向器と、
前記収差補正器で励起する多極子の強度および種類を制御する収差補正器制御部と、
該収差補正器制御部で任意の多極子の励起した状態で前記偏向器の前記収差補正器への前記一次荷電粒子線の入射する位置および角度と前記2次元位置検出器で検出される照射位置の関係を格納する記憶部を備え、
偏向による前記収差補正器への前記一次荷電粒子線の入射を複数の点で行い、複数の点で行った前記一次荷電粒子線の前記収差補正器の入射位置および角度と前記照射位置と前記多極子の関係について多極子場を励起した状態および励起しない状態で測定することにより、前記多極子場を励起した状態に含まれる多極子成分を抽出することを特徴とする多極子測定装置。
(2)多極子を持つ収差補正器により荷電粒子線装置の収差を補正したときに副次的に生じる寄生収差を無くすよう調整するために多極子成分を算出する多極子測定装置であって、
一次荷電粒子線を収束させる収束レンズと偏向させる偏向器とを含む光学系と、
前記一次荷電粒子線が照射される面上の位置を検出する2次元位置検出器と、
前記光学系と前記2次元位置検出器との間であって、前記多極子を持つ収差補正器が挿入されるスペースと、
前記スペースに挿入される前記収差補正器の前記多極子を制御する収差補正器制御部と、
前記多極子成分を算出する演算装置と、を有し、
前記演算装置は、前記多極子成分を、前記収差補正制御部で所定の多極子場の励起強度に設定された前記収差補正器へ前記偏向器により偏向された前記一次荷電粒子線が入射するときの複数の入射位置の座標及び角度と、前記一次荷電粒子線が前記収差補正器を通過して前記2次元位置検出器により検出される複数の照射位置の座標とを用いて算出することを特徴とする多極子測定装置。
【符号の説明】
【0065】
1…電子銃、2…可動絞り、3…コンデンサーレンズ、4…偏向器、5…真空バルブ、6…収差補正器、7…観察板、8…真空バルブ、9…二次電子検出器、10…電子銃カラム、11…収差補正器カラム、12…観察室、13…制御ユニット、14…走査コイル、15…二次電子検出器、16…電子検出器、20…電子銃電源、21…コンデンサーレンズ電源、22…偏向器電源、23…真空バルブ制御ユニット、24…収差補正器電源、25…イメージングユニット、26…二次電子検出器電源、27…走査コイル電源、28…二次電子検出器電源、29…アンプ、30…制御コンピュータ、31…演算装置、32…操作卓、33…モニタ、34…記憶部、40…光軸、41…電子ビーム、42…電子ビーム入射点、43…電子ビーム入射点の軌跡、50…電子ビーム照射点、51…電子ビーム照射点の軌跡、52…電子ビーム照射点、53…電子ビーム照射点。
【技術分野】
【0001】
本発明は、荷電粒子線装置の収差補正器を調整するための多極子測定装置に関する。
【背景技術】
【0002】
走査型電子顕微鏡(SEM)や透過型電子顕微鏡(TEM)などの電子顕微鏡をはじめとする荷電粒子線装置では、荷電粒子ビームを集束するため電場若しくは磁場を用いたレンズが使用される。電場若しくは磁場レンズでは、各種収差が不可避的に発生する。したがって、縮小率を高くして荷電粒子ビーム線を絞ろうとしても、収差が大きくてはスポット径を小さくできず、微細構造の観察や寸法測定精度の向上ができない。
【0003】
荷電粒子線装置では、分解能を向上するために、収差補正器の導入が進められている。この収差補正器は、多段に設置された多極子レンズにより構成され、多極子レンズ内に電場ないし磁場を発生することにより、収差を除去する。収差には複数の種類があり、収差の種類に応じて適切な多極子場の設定が必要となっている。
【0004】
収差補正器に関しては、例えば、以下の非特許文献1に開示されているように、12極子レンズを4段用いたものがある。非特許文献1の収差補正器においては、収差補正方法として、収差の種類に応じた多極子場の調整方法が記述されている。
【0005】
収差と補正量の関係に関しては、非特許文献2もしくは特許文献1に開示されている。ここでは理想的な条件下において、計算から収差と多極子場組み合わせの関係を導き出している。また特許文献1では、収差補正器において収差を測定し、これを補正する技術も開示されている。この技術は、フォーカスを変えて取得した複数枚の画像からビームプロファイルデータを取得し、取得したビームプロファイルデータに基づいて各種幾何収差の収差量を求め、求めた収差量に応じて収差補正器へ入力する補正量を決定して、各種収差を除去している。
【0006】
しかし、これらの収差測定は、試料にビームをフォーカスした状態あるいはフォーカスした状態を基準にわずかにずらした状態で行う必要があるが、収差の影響を受けるためビームフォーカスした状態の維持は崩れやすく、収差測定可能な状態となる前段階の調整が必要である。この調整は手順を繰り返す必要があり、調整時間が問題となっていた。また、これらの測定では、1段分の1種類の多極子場などの特定の要素のみを大きくするとフォーカス状態が維持できなくなるため、要素毎の測定が困難である。そういった測定が困難であるために、非特許文献2の方法が考案された。
【0007】
あらかじめの収差と補正量の関係の規定において、補正器における多極子の機械的な位置ズレなどの理想状態からのズレを考慮して補正する場合を想定する。この場合、収差補正を行うと、さらに補正に伴い副次的に発生する収差(寄生収差)が発生するため、その抑制が必要となる。この寄生収差を抑えるには、主目的の補正場のほかに補助的な多極子場を励起する。したがって、より高度な調整を想定するとき、収差と補正量の関係は、理想的な多極子場と補正量の関係の測定に加えて、さらに補助的な多極子場の組み合わせの測定も必要で、その測定にかかる時間が問題となっていた。また、収差量は光学条件に依存するため、光学条件毎に収差と補正量の関係を調べることが必要となり、条件分だけ時間がかかる。
【0008】
上記、収差と補正量の関係の測定においてはさらに、寄生収差が大きい場合、ビームが測定範囲外に外れ測定ができなくなるという欠点があり、これを回避するためには細かいステップで繰り返す必要があり、手順が煩雑になる。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2005−183086号公報
【非特許文献】
【0010】
【非特許文献1】Nuclear Instruments and Methods in Physics Research、A363(1995)、第316〜325頁
【非特許文献2】Optik 116巻、9号、第438−448頁
【発明の概要】
【発明が解決しようとする課題】
【0011】
収差補正器の本格的な運用の前段階において、入力値(電圧や電流およびその配分)の強度に対して励起される多極子場の強度の関係、多極子場の強度に対して必要となる調整場の関係などを記したテーブルデータ取得を行う。ここでは、誤差因子として、極子の製作上の位置ズレや、入力値に対する多極子場の強度(入力値に対する応答特性)の差などによって生じる設計上の想定と実際の観察との差を確認・記録し、さらに多極子場において本来意図する効果とは別に発生する収差(寄生収差)を抑えるため調整場の組み合わせと強度を記録する。この測定は収差補正器をとりつけた電子顕微鏡上で行うが、走査型の電子顕微鏡での観察は十分にプローブを絞った状態(2次電子を利用する場合)にする必要があるため、複数の段の多極子場を連動して動作させる必要があり、多極子場の励起を1段分だけ行うといった要素に切り分けが困難である。要素毎に切り分けられないと条件毎にそれぞれ異なるテーブルデータが必要となるため、装置に要求される膨大な観察条件の数のテーブルデータ取得には煩雑な手間や時間がかかり、未測定の条件への対応ができず運用に制限が生じる。
【0012】
さらに、上記電子顕微鏡でプローブを絞った状態の観察においては、わずかな変化にも敏感なため検出感度が高いものの、多極子場励起の誤差として偏向場が大きく含まれている場合はプローブを絞るための対物レンズから外れて観察できなくなるなど大きな変化に弱く、テーブルデータ取得時の測定にも制限がある。したがって、比較的小さいステップで多極子場強度を変化させてテーブルデータを取得する必要があり時間がかかる。
【0013】
本発明の目的は、収差補正器のテーブルデータを容易に取得できる多極子測定装置を提供することにある。これにより、短期間で収差補正器の調整が可能となり、収差補正器の量産化が可能となる。
【課題を解決するための手段】
【0014】
本発明は収差補正器の多極子場特性を測定する装置を提供する。本装置では、荷電粒子線を収束レンズと収差補正器に通過させ、通過した荷電粒子線を蛍光板等の観察板に照射し、観察板上で照射される位置や照射された荷電粒子線のビームプロファイルの観察を行う。収差補収束レンズと収差補正器の間には偏向器が備えられ、荷電粒子線の収差補正器に対する入射位置と角度を制御することができる。
【0015】
収差補正器に任意の多極子場を励起すると、多極子場の種類と大きさおよび荷電粒子線の多極子場への入射位置と角度の設定パラメータによって、荷電粒子線の観察板上の照射位置とビームプロファイルが原理的に変化する。また、荷電粒子線の観察板上の照射位置とビームプロファイルはこれらの設定パラメータなどの原理的な因子以外にも、極子の位置ズレと入力される電圧や電流に対する応答特性といった誤差因子によって変化する。本発明は、上記設定パラメータを変更して、観察板上の照射位置を測定し、多極子場励起時の誤差因子を打ち消すテーブルを算出する。
【発明の効果】
【0016】
本発明の装置によって収差補正器の多極子場特性を調べることができ、電子顕微鏡等の荷電粒子線装置へ搭載する前に収差補正器のスクリーニングが可能になる。また、荷電粒子線を直接観察することができるため、2次電子を利用する場合と比べて細かい調整や制限が不要となり、検査とテーブル作成を容易かつ高速に行える。さらに単一の段といった要素に限定して調べることができるため、課題の切り分けや汎用性の高いデータ取得が可能になる。同じ装置で複数の収差補正器を検査できるため、安定した条件で検査でき、品質の向上に繋がる。
【図面の簡単な説明】
【0017】
【図1】第1の実施例に係る多極子測定装置の全体構成概略図である。
【図2A】図1に示す多極子測定装置内における電子ビームの軌道を説明するための装置模式図である。
【図2B】図1に示す多極子測定装置内における電子ビームの軌道を説明するための装置模式図である。
【図2C】図1に示す多極子測定装置内における電子ビームの軌道を説明するための装置模式図である。
【図2D】図1に示す多極子測定装置内における電子ビームの軌道を説明するための装置模式図である。
【図3A】図1に示す多極子測定装置の観察板上における電子ビームの照射点の軌跡の一例を示す説明図である。
【図3B】図1に示す多極子測定装置の観察板上における電子ビームの照射点の軌跡の他の例を示す説明図である。
【図3C】図1に示す多極子測定装置の観察板上における電子ビームの照射点の軌跡の他の例を示す説明図である。
【図3D】図1に示す多極子測定装置の観察板上における電子ビームの照射点の軌跡の他の例を示す説明図である。
【図3E】図1に示す多極子測定装置の観察板上における電子ビームの照射点の軌跡の他の例を示す説明図である。
【図4】図1に示す多極子測定装置を用いて多極子場を測定するときのフローチャートである。
【図5A】図1に示す多極子測定装置を用いて多極子場を測定するときの多極子への入射電子ビームの偏向パターンの一例を示した説明図である。
【図5B】図1に示す多極子測定装置を用いて多極子場を測定するときの多極子への入射電子ビームの偏向パターンの他の例を示した説明図である。
【図5C】図1に示す多極子測定装置を用いて多極子場を測定するときの多極子への入射電子ビームの偏向パターンの他の例を示した説明図である。
【図5D】図1に示す多極子測定装置を用いて多極子場を測定するときの多極子への入射電子ビームの偏向パターンの他の例を示した説明図である。
【図6】第1の実施例に係る多極子測定装置の他の例を示す全体構成概略図である。
【図7】第1の実施例に係る多極子測定装置の他の例を示す全体構成概略図である。
【発明を実施するための形態】
【0018】
以下、実施例として4−8極型収差補正器で本装置を利用した例を用いて説明する。
【実施例1】
【0019】
図1に本発明の第1の実施例に係る多極子測定装置の全体構成の概略図を示す。構成は、大まかに、電子ビームを照射と偏向を行う電子銃カラム10、収差補正器が格納される収差補正器カラム11、観察板が格納される観察室12、各構成部品を制御するための制御ユニット13により構成されている。制御ユニット13には、更に、調整量やずれ量を算出する演算装置31や、装置と装置ユーザとのマン・マシンインタフェースとなる操作卓32、取得情報を表示するモニタ33、所定の情報を格納するための記憶部34が接続されている。操作卓32は、例えば、キーボードやマウスなどの情報入力手段により構成される。
【0020】
はじめに、電子銃カラム10、収差補正器カラム11、観察室12の構成要素について説明する。電子銃カラム10、収差補正器カラム11、観察室12は連結され、内部を真空にして、一体の装置として動作するが、収差補正器カラム11を別の収差補正器と交換できるよう切り離すことができる。切り離す場合には、真空バルブ5と真空バルブ8が閉じられ、電子銃カラム10と観察室12の真空を維持する。電子銃1は電子銃電源20により電子ビームを所定の電圧で放出させ、放出された電子ビームは、光軸40に沿って後段の構成要素へ入射する。電子ビームは可動絞り2にてビーム電流を制限され、コンデンサーレンズ3で集束され、偏向器4、収差補正器6を通り、観察板7へ照射される。動作中、真空バルブ制御ユニット23によって真空バルブ5と真空バルブ8は解放され、電子銃1から観察板7までに電子ビームを遮るものはない。偏向器4は偏向器電源22を通じて制御コンピュータ30と接続され、制御コンピュータ30により任意の大きさ、向き、タイミングで偏向を行うことができる。符号21はコンデンサーレンズ電源である。
【0021】
収差補正器カラム11内の収差補正器6は4段の12極子を持ち、各極子は収差補正器電源24と接続され、極子それぞれについて任意の大きさの電界もしくは磁界あるいは電界と磁界の両方を発生することができる。12極子は収差補正器電源24の12極子への入力値の組み合わせにより、電界もしくは磁界の2極子場、4極子場、6極子場、8極子場といった多極子場を形成可能である。多極子場は重畳して形成することも可能であり、その大きさや種類、位相、どの段で行うかは収差補正器電源24と接続された制御コンピュータ30によって決定される。
【0022】
観察室12内部の観察板7は、観察板7上に照射される電子ビームの電流量と位置が検出され、検出された情報はイメージングユニット25によって制御コンピュータ30に送られる。なお、同一符号は同一構成要素を示す。
【0023】
次に、本多極子測定装置の動作の説明をする。動作は大きく分けて、軸確認(調整)、多極子場の測定、多極子場の調整値(補助場)算出に分けられる。なお、本実施例では個別の記述は省略するが、多極子の励起状態の再現性を上げるために磁界を用いる多極子は励磁強度を変える場合はデガウス動作を行っても良い。また、本実施例は加速電圧一定の条件で行っている。実際の測定では使用する加速電圧すべてについて同様の測定を行う。
【0024】
軸確認を説明する。軸確認は偏向器4によって電子ビーム41(図2A等参照)を収差補正器6上で光軸40に平行に2次元スキャンすることで行う。まず、収差補正器6で多極子場を励起しない状態(もしくは任意の値)で偏向器4によって2次元スキャンを行い、2次元スキャン中の偏向器4の入力値と観察板7上で観察される位置の関係を記録する。次に、収差補正器6で一つの多極子場の入力値の強度を変更し、再度2次元スキャンを行い、2次元スキャン中の偏向器4の入力値と観察板7上で観察される位置の関係を記録する。多極子場の軸を通る電子ビームは多極子場の励起強度によらず同じ位置になるため、多極子場の変更前後を比較して、2次元スキャン中の偏向器4の入力値に対する観察板7上で観察される位置の変化が最も少ない地点を軸の位置として検出できる。
【0025】
本軸確認は偏向器4による2次元スキャンを光軸40に平行にして行ったが、座標を特定できれば傾けて調べる方法もある。また、高速かつ高精度に軸の位置を調べる方法として、2次元スキャン中のサンプリング数を一定と仮定した場合、はじめに広い領域で粗く2次元スキャンし、次に動きが最も少ない領域を中心として徐々にスキャン領域を狭めていく方法もある。
【0026】
本軸確認はどの多極子に対しても適用可能であるが、多極子場測定における軸の設定としては、主として軌道を形成するのに用いる4極子を基準として行うことが望ましい。ただし、通常、軸の位置は4段それぞれで異なる位置になり、多極子場測定はそれぞれの段毎に設定した軸を基準にする。段毎の軸の位置の違いは記録され、SEMに収差補正器6を組み、各段の軸調整をするときに必要な2極子場のオフセット量を見積もるのに利用できる。4極子の軸を基準にするのは同じ段であっても、多極子場によって軸の位置が異なる場合が多く、全ての軸を一致させることができないためである。したがって、4極子の軸と異なる軸の位置を持つ多極子に対しては、多極子場測定において2極子成分として取り扱う。
【0027】
多極子場測定を説明する。本実施例での多極子場測定は、軸確認を行った後、偏向器4によって電子ビーム41を前述の軸確認で得られた軸に対して軸のまわりを回転して収差補正器6を通過させ、その時の観察板7で電子ビーム41の位置を検出し、検出された位置と収差補正器6への入射位置の関係を調べることで行う。
【0028】
電子ビーム41の回転について、図2A〜図2Dに示す多極子測定装置の模式図を用いて説明する。本例では軸確認で確認された軸の位置が光軸40に一致しているものとする。図2Aは電子ビーム41の回転前の状態で、コンデンサーレンズ3によって電子ビーム41が観察板7で収束されている。電子ビーム41の回転はこの状態から、図2Bに示すように光軸40から平行に一定の半径rの距離を保って収差補正器6に入射するように偏向器4を調整する。
【0029】
各多極子場測定で得られる結果の例として、電子ビーム41は偏向器4で回転され、収差補正器6で励起する多極子場の影響を受けて、観察板7上で図3A〜図3Eに示すように観察され、モニタ33に出力することができる。図3A〜図3Eでは観察板7の電子ビーム41の照射点50を例として示し、電子ビーム41の回転に伴う電子ビームの照射点の移動を軌跡51で示している。ここでは多極子場がない場合を図3A、4極子場の影響を受けたものを図3B、6極子の影響を受けたものを図3C、8極子の影響を受けたものを図3Dに示している。さらに8極子の強度を強めたものとして図3Eを示している。これらの形状は収差補正器6の多極子場の作用と収差補正器6への電子ビーム41入射の関係で決定される。なお、図3Eにおける符号52は電子ビームのプロファイル内部の照射点、符号53は電子ビームのプロファイル外周部の照射点である。
【0030】
図4を用いて多極子場測定フローを説明する。ここでは電子ビーム41が軸から半径rの円周上を等間隔にM点で一周する。また多極子場の強度を0からΔTずつP+1回変化し、ΔT×Pまで変化して測定している。本例ではカウンタとして任意の整数n、iを使用する。
ステップS10:制御コンピュータ30により収差補正器電源24を制御して、収差補正器6の多極子場の励起強度をΔT×iに設定する。
ステップS11:制御コンピュータ30により偏向器4を制御して収差補正器6の多極子場への入射座標を設定する。収差補正器6への入射座標(xni、yni)は式(1)で表される。
【0031】
【数1】
【0032】
入射座標(xni、yni)は、偏向器電源22への電流もしくは電圧などの入力値から計算できる。
ステップS12:観察板7上の電子ビーム41の照射座標(Xni、Yni)を取得する。検出される電子ビームの照射座標はイメージングユニット25によって制御コンピュータ30に送られ、ステップS11で設定した電子ビームの入射座標と同期されて記憶部34に記録される。
ステップS13:カウンタnを用いて規定の動作(M点移動)を終えたか判断する。終えている場合はステップS15へ、終えてない場合はステップS14の処理に進む。8極子成分までを抽出するにはMは6以上が必要で、計算のしやすさのために2のべき乗であることが望ましい。
ステップS14:カウンタnに1をプラスし、再度ステップS11に戻る。
ステップS15:カウンタnをリセットして0に戻す。
ステップS16:カウンタiを用いて規定の動作(多極子強度の変更)を終えたか判断する。終えている場合はステップS18へ、終えてない場合はステップS17の処理に進む。
ステップS17:カウンタiに1をプラスし、再度ステップS10に戻る。
ステップS18:記憶部34に格納した入射座標(xni、yni)と照射座標(Xni、Yni)の関係から強度ΔT×iについて多極子成分((Dc、Ds)、(Qc、Qs)、(Hc、Hs)、(Oc、Os))iを算出する。多極子成分はDc:2極子コサイン成分、Ds:2極子サイン成分、Qc:4極子コサイン成分、Qs:4極子サイン成分、Hc:6極子コサイン成分、Hs:6極子サイン成分、Oc:8極子コサイン成分、Os:8極子サイン成分を現す。算出の仕方は後述する。
【0033】
上記ステップS11、ステップS12およびステップS18に関して、収差補正器6の多極子の配置と電子ビーム41の座標と観察板7上の座標はあらかじめ校正しておき、得られる調整テーブルデータの座標系と収差補正器6の機械的な位置関係を対応づけて管理する。これにより、収差補正器6を電子顕微鏡に組み込む際には、収差補正器6の多極子位置を参照することで、調整テーブルの座標系と電子顕微鏡装置の座標系との校正が容易になる。
【0034】
本例では多極子場の測定は一つの多極子場についてのみ記述した。実際の測定は、収差補正器6の4段多極子全ての段でそれぞれ多極子場を単独に励起して測定する。それらの手順は多極子場によらず同じである。ここで測定するそれぞれの多極子場は、2極子場、4極子場、6極子場、8極子場をさし、さらに各々の多極子場はコサイン分布とサイン分布の2種類について測定する。また磁場と電場の多極子はそれぞれ異なる種類の多極子場としてそれぞれ測定する。なお、ステップS19は初期値に戻す処理を示す。
【0035】
次にステップS18の多極子成分の算出の仕方について説明する。算出は、照射座標(Xni、Yni)をnの関数とみなしてx座標およびy座標それぞれについてフーリエ級数展開することで、多極子成分を算出できる。ただし、4極子場成分については、ビーム回転成分の除去を行う必要がある。なお各多極子成分は、多極子の位置と観察板7までの距離に比例して変わるため、相対的な指標である。各成分((Dc、Ds)、(Qc、Qs)、(Hc、Hs)、(Oc、Os))iと照射座標(Xni、Yni)の関係は回転成分を(Rc、Rs)として式(2−1)、式(2−2)で記述できる。
【0036】
【数2】
【0037】
(R成分の初期位相を0と仮定した場合Rs=0)算出された値は、各成分の強度と入射条件、多極子と観察板までの距離で変わるため、相対指標として利用する。ただし、厳密に校正すれば絶対値として測定に利用することも可能である。
【0038】
測定結果から調整量の算出について説明する。調整量の算出は、多極子wを(w=2、4、6、8。それぞれコサインとサイン分布)仮定したとき、w極子強度の入力値の強度awに対し補助場として入力値に対する係数kwjで定義した補助的な多極場成分((kw2c、kw2s)、(kw4c、kw4s)、(kw6c、kw6s)、(kw8c、kw8s))の励起の組み合わせを算出することである。w極子場の入力値の強度をawとした場合、実際の多極子場として出力されるj極子場成分(j=2c、2s、4s、4c、6c、6s、8c、8s。cはコサイン、sはサイン)(例j=2cなら2極子コサイン成分Dc)の強度をbwjとすると次式となる。
【0039】
【数3】
【0040】
bwwはw極子励起に対して本来意図した多極場成分であるため主成分と呼び、それ以外を副成分と呼ぶこととする。調整は多極子励起にとって副成分が0となればよく、w極子場の出力値cjとしたときj≠wについてcj=0を満たせばよい。ここで調整のために補助成分としてw極子強度の入力値の強度awに対して((kw2c、kw2s)、(kw4c、kw4s)、(kw6c、kw6s)、(kw8c、kw8s))の組み合わせを加える(kjj=1)。具体例として4極子場コサイン分布(w=4c)の励起を行う場合、式(4)を満たすよう多極成分を補助場として加える。
【0041】
【数4】
【0042】
ただし、条件によっては解がないことや現実的には有効でない解もある。例えば主成分C4cが0に近づく場合は有効な解でない。これらを回避するために係数には閾値を設定し、その範囲内で入力値に対して主成分が最も大きくなる条件、もしくは副成分に対する主成分の比率が最大になる条件を選択する。また、副成分に対する主成分の比率が基準を満たさない場合は、性能が不十分として収差補正器の選別に利用できる。
【0043】
上記係数の算出においてさらに簡素化した例として、w極子場励起する場合の補助場について、補助場n極子場中の多極成分bnjは補助場の主成分bnnと副成分bnwのみ考慮しそれ以外はbnj=0とみなして処理する。具体例として4極子場コサイン分布(w=4c)の励起を行う場合、式(4)を式(5−1)として計算する。なお、式(5−1)のgは、式(5−2)で示される。
【0044】
【数5】
【0045】
上記算出における係数の組は、入力値である任意の多極子場の強度を変えて取得する。実際の多極子場においては、ヒステリシスや長時間安定性の問題などにより微小な調整値は無意味になることもあり、主成分の影響が大半であることから本簡素化は実用上有効である。
【0046】
副成分がゼロとなる調整量を算出し、求められた値をテーブル化することにより、収差補正器を荷電粒子線装置に取り付けた際、容易に調整することが可能となる。調整量の算出や得られた値のテーブル化は演算装置31により行なうことができる。
【0047】
多極子場の成分測定では、収差補正器6への入射位置に対する観察板7上の照射位置の関係を用いている。これは、図3A〜図3Eで得られる軌跡に対する近似式の算出に用いるフーリエ級数展開を計算しやすくするために、位相情報として利用する。
【0048】
観察板7における電子ビーム41の照射位置検出の補足事項として、照射位置において電子ビームは広がりを持ち一点に収束されない場合がある。このような場合は、電子ビームの広がりの重心位置や、ノイズフィルタをかけた後に輝度最大となる位置などを利用する。また広がりそのものを防ぐには、測定における軸からの回転半径rに対して、収差補正器6の入射位置における電子ビームの広がりを相対的に小さくすることである。
【0049】
観察板7における電子ビーム41の照射位置に関してさらに、帯電や電源安定性による電子ビームの照射点のドリフトが発生する場合がある。ドリフトに関しては測定時間を考慮して、数分までの短時間の安定性と数時間までの長時間の安定性に分かれる。また安定性は位置検出の必要精度に対して影響するかどうかで判定する。本実施例における測定の時間は全体として数時間以内を想定しており、個別の動作として図4のフローのステップS10からステップS15までの任意の励起状態における座標取得1セットを1分以内と想定している。ドリフトの影響は、ドリフト前後の同一条件での電子ビーム照射位置を比較することで確認できる。多極子を励起している場合など完全に同じ条件にできない状態でも電子ビーム41の入射位置を軸の位置に設定することで確認できる。またステップS10においてその都度軸確認と再調整を行っても良い。したがって数分以上の長時間安定性に関しては、測定動作にドリフト確認を付加することで対応できる。短時間安定性に関しては電源への要求仕様に盛り込むことで対応する。本測定における電子ビームサイズもしくは位置精度を数ミクロンと想定しており、通常の電子顕微鏡よりもサイズが数桁大きいため、電子顕微鏡で通常用いる安定度の電源を使用すれば、ドリフトの影響は無視できる。
【0050】
以上で実施例の説明を一通り終えた。以下ではフローの個別の動作について代替方法の例を示す。
【0051】
多極子場の成分測定において、図2Dのように電子ビーム41を収束レンズ3によって観察板7上で収束させず広げ、偏向器4で収差補正器6の軸は合わせたまま電子ビーム41を回転させないで、観察板7上に照射される電子ビーム41で形成されるビームプロファイル形状から判断する手法もある。ビームプロファイルの形状は、図3A〜図3Eの電子ビームの照射点の軌跡に相当する。しかしながらこの手法では、電子ビームの移動を用いた測定の位相に相当する情報が得られない。また、図3Eの例など内部への折り返しがあるものについて、電子ビームの移動を用いた測定では、照射点52を含む軌跡や照射点を区別できるが、プロファイルの形状からは照射点53を通る外周部しか判断できず計算に十分な情報が得られない欠点があるなど適用範囲が限られる。
【0052】
多極子場の成分測定における偏向器4による電子ビーム41の移動に関して、本実施例では回転半径を固定して測定を行ったが、収差補正器6で発生させる多極子場強度によっては、電子ビーム41の観察板7上の照射位置が観察板7の観察可能領域を外れることがある。その場合は、偏向器4による電子ビーム41の回転半径を変えて、観察板7の観察可能領域内に収める。このとき各多極子成分の計算では回転半径変更を考慮した計算を行う。具体的には半径の大きさに対して4極成分は1次比例するが、8極成分は3次比例する。
【0053】
多極子場の成分測定における偏向器4による電子ビーム41の移動に関して、図2Bのように電子ビームが光軸40に対して平行に入射する場合について示したが、図2Cのように光軸40に対して一定の傾斜を加える方法もある。この場合は段毎に電子ビームの入射位置が変わるため、計算に入射位置のズレを考慮する必要がある。また、異なる条件で比較しているため、相対的な差を考慮するのに誤差が入らないよう注意が必要である。長所は偏向器4を1段偏向として動作することができ、2段偏向よりも動作が簡素化され、電流あたりの偏向量が比較して大きくできることである。
【0054】
多極子場の成分測定における偏向器4による電子ビーム41の移動に関して、例は円形パターンを示したが(図5A)、図5Bに示すような異なる半径の円形パターンの組み合わせや、図5Cに示すような螺旋パターン、図5Dに示すような2次元スキャンパターンなど電子ビーム41の収差補正器6への入射が軸を除いて8点以上の複数の異なる座標を含んでいればどのようなパターンでもよい。パターンは計算しやすさと精度に関わってくる。円形は単純であるため計算がしやすい。なお、符号42は電子ビーム入射点、符号43は電子ビーム入射点の軌跡である。
【0055】
多極子場の成分測定における偏向器4による電子ビーム41の移動に関して、観察板7上の照射点の座標位置から求めない方法として、軸以外の複数の入射位置について、多極子場励起時に観察板7で観察される照射位置が多極子場を励起しない場合の照射位置と一致するよう偏向器4の入力値を制御し、その値と励起しない場合に偏向器4に入力している値との差分を求め、差分から多極子成分を検出するものがある。長所は目視による打ち消しの確認が容易になることである。欠点は電子ビーム41の制御が必要となりその分だけ余計に時間がかかることである。
【0056】
得られた結果の利用の仕方として、単純に調整テーブルとして利用するだけでなく、収差補正器6をSEMに搭載した際に収差が最も小さくなる、あるいは調整量が最も少なくなる組み込みの選択に利用できる。これは、収差補正器6は非特許文献1にあるように、2、3段目にラインフォーカスを作るが、ラインフォーカスは方向によって感度が異なるため、軌道の方向がSEMで決定している場合、組み込む向きによって収差の影響が異なるためである。
【0057】
また本装置は、収差補正器6の多極子場の観察のみならず、図6に示すように、電子銃カラム10内に、二次電子検出器9を備え、偏向器4による2次元スキャンを行うことで、収差補正器6の最上部の多極子に対してSEM動作を行い、多極子形状の検査を行ってもよい。このとき真空バルブ5は収差補正器6の多極子を観察するのに十分な大きさを持たせる。なお、符号26は二次電子検出器電源である。
【0058】
さらに、本装置は真空計(図示せず)を備えることから、真空試験や、収差補正器電源による耐電圧試験も合わせて行うことができる。収差補正器6の大気から真空までの移行は真空バルブ5を閉じた状態で行われ、真空バルブ8を開いて試料室(観察室)12より真空引きする、もしくは、収差補正器カラム11に排気ポートを設け、真空バルブ8を閉じて電子銃カラム10と観察室12とは別の配管から真空引きをしても良い。装置の安定には電子銃カラム10の真空を保つことが重要である。
【0059】
観察板7の2次元位置検出器である2次元イメージセンサ具体例として、マイクロチャンネルプレート(MCP)、蛍光板とカメラの組み合わせがある。
また観察板7においてイメージセンサを用いない方法の例として、図7に示すように走査コイル14を配置した構成において、ファラデーカップなどの電子検出器16を用いて入射電子の面内の一点だけ電子を検出することで電子ビームの位置検出を行う方法がある。この方法では、電子ビーム41の回転動作時、図3A〜図3Eに示される照射点の各点において、短時間だけ回転動作などの電子ビーム41の移動を停止し、その状態で走査コイル14にてスキャン動作を行い、照射電子が電子検出器16を通過したときの信号がアンプ29で増幅されて制御コンピュータ30で検出され、同時に走査コイル14を駆動する電源27の電流もしくは電圧の値から位置を換算して検出する。また、電子検出器16を用いずに面内の一点だけを検出する手段として、観察板7上に一点だけ2次電子もしくは反射電子を放出しやすいパターンを用意し、放出された電子を図7の二次電子検出器15に取り込んで検出する手段もある。これらのイメージセンサを用いない方法は、用いる方法に比べて時間が余計にかかる。なお、符号28は二次電子検出器電源である。
【0060】
実施例の測定に追加して、本装置は、通常の収差補正器の使用条件である軌道形成を行った状態で、収差補正器の軌道調整に使用することができる。この状態では図2Dに示すようにコンデンサーレンズ3により電子ビーム41を光軸40と平行になるよう収差補正器6に入射し、図2Bにおける通常の測定同様に偏向器4で軸に平行に保ったまま入射位置を変更して、観察板7に照射される位置の観察を行う。本調整は、SEM搭載前の租調整および動作確認に位置づけられる。SEM観察を行わないため詳細な調整はできないが、大きなズレの調整が可能である。軌道調整は非特許文献1に準じ、偏向器4の入射位置に対して軸対称な位置に電子ビームが照射されること、4極子の増減に対してビームの移動が起きないこと(軸調整)、ラインクロス位置での2極子ワブラに対してビーム移動が起きないことが実行される。ここでは多極子成分の算出は行わない。なお、本調整において電子ビームは照射位置で収束されないため、照射位置算出には重心位置の計算などが用いられる。
【0061】
図1に示す多極子測定装置を用い、電子ビームの収差補正器に対する入射位置と角度を制御し、収差補正器に任意の多極子場を励起に応じて電子ビームの観察板上の照射位置の変化により多極子成分を抽出し、不要な多極子成分の打ち消し条件と入力に対する応答特性の測定を行い、入力値と出力場の関係と設定テーブルを算出し、それを用いて所定の装置に取り付けた当該収差補正器を調整したところ、従来1週間〜1ヶ月掛かっていた調整時間を数時間に短縮することができた。また、本装置によって収差補正器の多極子場特性を調べることができ、電子顕微鏡等の荷電粒子線装置へ搭載する前に収差補正器のスクリーニングが可能になる。また、荷電粒子線を直接観察することができるため、2次電子を利用する場合と比べて細かい調整や制限が不要となり、検査を高速に行なえ、また入力値(電圧や電流およびその配分)の強度に対して励起される多極子場の強度の関係、多極子場の強度に対して必要となる調整場の関係などを記したテーブル作成を容易かつ高速に行える。さらに単一の段といった要素に限定して調べることができるため、課題の切り分けや汎用性の高いデータ取得が可能になる。同じ装置で複数の収差補正器を検査できるため、安定した条件で検査でき、品質の向上に繋がる。また、収差補正器の量産化が可能となる。
【0062】
以上、本実施例によれば、収差補正器を通過した荷電粒子を直接検出する検出器(観察板、電子検出器等)を備えることにより、収差補正器のテーブルデータを容易に取得できる多極子測定装置を提供することができる。これにより、短期間で収差補正器の調整が可能となる。
【0063】
なお、本発明は上記した実施例に限定されるものではなく、様々な変形例が含まれる。例えば、上記した実施例は本発明を分かりやすく説明するために詳細に説明したものであり、必ずしも説明した全ての構成を備えるものに限定されるものではない。また、実施例の構成の一部について、他の構成の追加・削除・置換をすることが可能である。
【0064】
以上、本願発明を詳細に説明したが、以下に主な発明の形態を列挙する。
(1)一次荷電粒子線を照射する照射光学系と、
該一次荷電粒子線と照射される面上の位置座標を検出する2次元位置検出器と、
該位置検出器の検出面上に前記一次荷電粒子線を収束させる収束レンズと、
該収束レンズと前記2次元位置検出器との間に多段の多極子を持つ収差補正器を挿入するためのスペースと、
該スペースに挿入されたときの前記収差補正器に前記一次荷電粒子線が入射する位置および角度を制御する偏向器と、
前記収差補正器で励起する多極子の強度および種類を制御する収差補正器制御部と、
該収差補正器制御部で任意の多極子の励起した状態で前記偏向器の前記収差補正器への前記一次荷電粒子線の入射する位置および角度と前記2次元位置検出器で検出される照射位置の関係を格納する記憶部を備え、
偏向による前記収差補正器への前記一次荷電粒子線の入射を複数の点で行い、複数の点で行った前記一次荷電粒子線の前記収差補正器の入射位置および角度と前記照射位置と前記多極子の関係について多極子場を励起した状態および励起しない状態で測定することにより、前記多極子場を励起した状態に含まれる多極子成分を抽出することを特徴とする多極子測定装置。
(2)多極子を持つ収差補正器により荷電粒子線装置の収差を補正したときに副次的に生じる寄生収差を無くすよう調整するために多極子成分を算出する多極子測定装置であって、
一次荷電粒子線を収束させる収束レンズと偏向させる偏向器とを含む光学系と、
前記一次荷電粒子線が照射される面上の位置を検出する2次元位置検出器と、
前記光学系と前記2次元位置検出器との間であって、前記多極子を持つ収差補正器が挿入されるスペースと、
前記スペースに挿入される前記収差補正器の前記多極子を制御する収差補正器制御部と、
前記多極子成分を算出する演算装置と、を有し、
前記演算装置は、前記多極子成分を、前記収差補正制御部で所定の多極子場の励起強度に設定された前記収差補正器へ前記偏向器により偏向された前記一次荷電粒子線が入射するときの複数の入射位置の座標及び角度と、前記一次荷電粒子線が前記収差補正器を通過して前記2次元位置検出器により検出される複数の照射位置の座標とを用いて算出することを特徴とする多極子測定装置。
【符号の説明】
【0065】
1…電子銃、2…可動絞り、3…コンデンサーレンズ、4…偏向器、5…真空バルブ、6…収差補正器、7…観察板、8…真空バルブ、9…二次電子検出器、10…電子銃カラム、11…収差補正器カラム、12…観察室、13…制御ユニット、14…走査コイル、15…二次電子検出器、16…電子検出器、20…電子銃電源、21…コンデンサーレンズ電源、22…偏向器電源、23…真空バルブ制御ユニット、24…収差補正器電源、25…イメージングユニット、26…二次電子検出器電源、27…走査コイル電源、28…二次電子検出器電源、29…アンプ、30…制御コンピュータ、31…演算装置、32…操作卓、33…モニタ、34…記憶部、40…光軸、41…電子ビーム、42…電子ビーム入射点、43…電子ビーム入射点の軌跡、50…電子ビーム照射点、51…電子ビーム照射点の軌跡、52…電子ビーム照射点、53…電子ビーム照射点。
【特許請求の範囲】
【請求項1】
一次荷電粒子線を照射する照射光学系と、
該一次荷電粒子線と照射される面上の位置座標を検出する2次元位置検出器と、
該位置検出器の検出面上に前記一次荷電粒子線を収束させる収束レンズと、
該収束レンズと前記2次元位置検出器との間に多段の多極子を持つ収差補正器を挿入するためのスペースと、
該スペースに挿入されたときの前記収差補正器に前記一次荷電粒子線が入射する位置および角度を制御する偏向器と、
前記収差補正器で励起する多極子の強度および種類を制御する収差補正器制御部と、
該収差補正器制御部で任意の多極子の励起した状態で前記偏向器の前記収差補正器への前記一次荷電粒子線の入射する位置および角度と前記2次元位置検出器で検出される照射位置の関係を格納する記憶部を備え、
偏向による前記収差補正器への前記一次荷電粒子線の入射を複数の点で行い、複数の点で行った前記一次荷電粒子線の前記収差補正器の入射位置および角度と前記照射位置と前記多極子の関係について多極子場を励起した状態および励起しない状態で測定することにより、前記多極子場を励起した状態に含まれる多極子成分を抽出することを特徴とする多極子測定装置。
【請求項2】
請求項1記載の多極子測定装置において、
抽出した前記多極子成分の値を元に、前記収差補正器制御部による任意の多極子場励起に付随して発生している、本来意図する任意の多極子とは異なる種類の多極子成分を打ち消す励起配分を算出し記録することを特徴とする多極子測定装置。
【請求項3】
請求項2記載の多極子測定装置において、
任意の多極子場を励起する電圧ないしは電流の入力値に対して、応答として多極子場の実際に出力される強度を算出し、さらに多極子場の強度を変更し出力される強度を算出する作業を繰り返して、多極子場強度に対する入力値と出力の関係について記録することを特徴とする多極子測定装置。
【請求項4】
請求項1記載の多極子測定装置において、
多極子場の任意の励起強度における前記多極子成分の抽出は、前記偏向器の入射位置と角度は、任意の軸を基準として軸を中心に入射角度を一定にしたまま一定の距離を保つことを特徴とする多極子測定装置。
【請求項5】
請求項1記載の多極子測定装置において、
前記多極子成分の抽出における複数の前記偏向器の入射の変更に伴う照射位置について、前記2次元位置検出器の検出可能領域を考慮し、観察可能領域を外れないように、前記収差補正器制御部による任意の多極子場の励起強度に応じて前記偏向器の入射条件を変更し、該入射条件を多極子成分抽出の計算にフィードバックすることを特徴とする多極子測定装置。
【請求項6】
請求項1記載の多極子測定装置において、
前記多極子成分の抽出における複数の前記偏向器の入射の変更に伴う照射位置について、前記収差補正器制御部による任意の前記多極子場の励起時に、前記2次元位置検出器で検出される照射位置が前記多極子場を励起しない状態での照射位置に一致する条件を検出し、そのときに前記偏向器へ加えた値と励起しないときに加えた値の差分から前記多極子成分を抽出することを特徴とする多極子測定装置。
【請求項7】
多極子を持つ収差補正器により荷電粒子線装置の収差を補正したときに副次的に生じる寄生収差を無くすよう調整するために多極子成分を算出する多極子測定装置であって、
一次荷電粒子線を収束させる収束レンズと偏向させる偏向器とを含む光学系と、
前記一次荷電粒子線が照射される面上の位置を検出する2次元位置検出器と、
前記光学系と前記2次元位置検出器との間であって、前記多極子を持つ収差補正器が挿入されるスペースと、
前記スペースに挿入される前記収差補正器の前記多極子を制御する収差補正器制御部と、
前記多極子成分を算出する演算装置と、を有し、
前記演算装置は、前記多極子成分を、前記収差補正制御部で所定の多極子場の励起強度に設定された前記収差補正器へ前記偏向器により偏向された前記一次荷電粒子線が入射するときの複数の入射位置の座標及び角度と、前記一次荷電粒子線が前記収差補正器を通過して前記2次元位置検出器により検出される複数の照射位置の座標とを用いて算出することを特徴とする多極子測定装置。
【請求項8】
請求項7記載の多極子測定装置において、
前記多極子成分は、2極子コサイン成分、2極子サイン成分、4極子コサイン成分、4極子サイン成分、6極子コサイン成分、6極子サイン成分、8極子コサイン成分、8極子サイン成分を含むことを特徴とする多極子測定装置。
【請求項9】
請求項7記載の多極子測定装置において、
前記多極子成分は、本来意図した収差補正を行うための主成分とそれ以外の副成分とを含み、
前記演算装置は、前記副成分がゼロとなる調整量を算出し、得られた値をテーブル化することを特徴とする多極子測定装置。
【請求項10】
請求項7記載の多極子測定装置において、
前記2次元位置検出器は、観察板であることを特徴とする多極子測定装置。
【請求項11】
請求項7記載の多極子測定装置において、
前記光学系の前記偏向器と前記収差補正器が挿入される前記スペースとの間に二次電子検出器を更に有することを特徴とする多極子測定装置。
【請求項12】
請求項7記載の多極子測定装置において、
前記2次元位置検出器に代えて、走査コイルと電子検出器とを備えることを特徴とする多極子測定装置。
【請求項1】
一次荷電粒子線を照射する照射光学系と、
該一次荷電粒子線と照射される面上の位置座標を検出する2次元位置検出器と、
該位置検出器の検出面上に前記一次荷電粒子線を収束させる収束レンズと、
該収束レンズと前記2次元位置検出器との間に多段の多極子を持つ収差補正器を挿入するためのスペースと、
該スペースに挿入されたときの前記収差補正器に前記一次荷電粒子線が入射する位置および角度を制御する偏向器と、
前記収差補正器で励起する多極子の強度および種類を制御する収差補正器制御部と、
該収差補正器制御部で任意の多極子の励起した状態で前記偏向器の前記収差補正器への前記一次荷電粒子線の入射する位置および角度と前記2次元位置検出器で検出される照射位置の関係を格納する記憶部を備え、
偏向による前記収差補正器への前記一次荷電粒子線の入射を複数の点で行い、複数の点で行った前記一次荷電粒子線の前記収差補正器の入射位置および角度と前記照射位置と前記多極子の関係について多極子場を励起した状態および励起しない状態で測定することにより、前記多極子場を励起した状態に含まれる多極子成分を抽出することを特徴とする多極子測定装置。
【請求項2】
請求項1記載の多極子測定装置において、
抽出した前記多極子成分の値を元に、前記収差補正器制御部による任意の多極子場励起に付随して発生している、本来意図する任意の多極子とは異なる種類の多極子成分を打ち消す励起配分を算出し記録することを特徴とする多極子測定装置。
【請求項3】
請求項2記載の多極子測定装置において、
任意の多極子場を励起する電圧ないしは電流の入力値に対して、応答として多極子場の実際に出力される強度を算出し、さらに多極子場の強度を変更し出力される強度を算出する作業を繰り返して、多極子場強度に対する入力値と出力の関係について記録することを特徴とする多極子測定装置。
【請求項4】
請求項1記載の多極子測定装置において、
多極子場の任意の励起強度における前記多極子成分の抽出は、前記偏向器の入射位置と角度は、任意の軸を基準として軸を中心に入射角度を一定にしたまま一定の距離を保つことを特徴とする多極子測定装置。
【請求項5】
請求項1記載の多極子測定装置において、
前記多極子成分の抽出における複数の前記偏向器の入射の変更に伴う照射位置について、前記2次元位置検出器の検出可能領域を考慮し、観察可能領域を外れないように、前記収差補正器制御部による任意の多極子場の励起強度に応じて前記偏向器の入射条件を変更し、該入射条件を多極子成分抽出の計算にフィードバックすることを特徴とする多極子測定装置。
【請求項6】
請求項1記載の多極子測定装置において、
前記多極子成分の抽出における複数の前記偏向器の入射の変更に伴う照射位置について、前記収差補正器制御部による任意の前記多極子場の励起時に、前記2次元位置検出器で検出される照射位置が前記多極子場を励起しない状態での照射位置に一致する条件を検出し、そのときに前記偏向器へ加えた値と励起しないときに加えた値の差分から前記多極子成分を抽出することを特徴とする多極子測定装置。
【請求項7】
多極子を持つ収差補正器により荷電粒子線装置の収差を補正したときに副次的に生じる寄生収差を無くすよう調整するために多極子成分を算出する多極子測定装置であって、
一次荷電粒子線を収束させる収束レンズと偏向させる偏向器とを含む光学系と、
前記一次荷電粒子線が照射される面上の位置を検出する2次元位置検出器と、
前記光学系と前記2次元位置検出器との間であって、前記多極子を持つ収差補正器が挿入されるスペースと、
前記スペースに挿入される前記収差補正器の前記多極子を制御する収差補正器制御部と、
前記多極子成分を算出する演算装置と、を有し、
前記演算装置は、前記多極子成分を、前記収差補正制御部で所定の多極子場の励起強度に設定された前記収差補正器へ前記偏向器により偏向された前記一次荷電粒子線が入射するときの複数の入射位置の座標及び角度と、前記一次荷電粒子線が前記収差補正器を通過して前記2次元位置検出器により検出される複数の照射位置の座標とを用いて算出することを特徴とする多極子測定装置。
【請求項8】
請求項7記載の多極子測定装置において、
前記多極子成分は、2極子コサイン成分、2極子サイン成分、4極子コサイン成分、4極子サイン成分、6極子コサイン成分、6極子サイン成分、8極子コサイン成分、8極子サイン成分を含むことを特徴とする多極子測定装置。
【請求項9】
請求項7記載の多極子測定装置において、
前記多極子成分は、本来意図した収差補正を行うための主成分とそれ以外の副成分とを含み、
前記演算装置は、前記副成分がゼロとなる調整量を算出し、得られた値をテーブル化することを特徴とする多極子測定装置。
【請求項10】
請求項7記載の多極子測定装置において、
前記2次元位置検出器は、観察板であることを特徴とする多極子測定装置。
【請求項11】
請求項7記載の多極子測定装置において、
前記光学系の前記偏向器と前記収差補正器が挿入される前記スペースとの間に二次電子検出器を更に有することを特徴とする多極子測定装置。
【請求項12】
請求項7記載の多極子測定装置において、
前記2次元位置検出器に代えて、走査コイルと電子検出器とを備えることを特徴とする多極子測定装置。
【図1】

【図2A】
【図2B】
【図2C】
【図2D】
【図3A】
【図3B】
【図3C】
【図3D】
【図3E】
【図4】
【図5A】
【図5B】
【図5C】
【図5D】
【図6】
【図7】
【図2A】
【図2B】
【図2C】
【図2D】
【図3A】
【図3B】
【図3C】
【図3D】
【図3E】
【図4】
【図5A】
【図5B】
【図5C】
【図5D】
【図6】
【図7】
【公開番号】特開2013−58382(P2013−58382A)
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願番号】特願2011−195872(P2011−195872)
【出願日】平成23年9月8日(2011.9.8)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
【公開日】平成25年3月28日(2013.3.28)
【国際特許分類】
【出願日】平成23年9月8日(2011.9.8)
【出願人】(501387839)株式会社日立ハイテクノロジーズ (4,325)
【Fターム(参考)】
[ Back to top ]