
多機器臨床作業セルのための検体−搬送モジュール
【課題】多機器臨床作業セルの複数の検体−処理機器の各々と共に使用するようになっている検体−搬送モジュールを提供する。
【解決手段】このモジュールは、作業セル内の関連した機器の検体−吸引プローブに対して相対的に個々の検体−容器ラックを搬送するようになっており、および、作業セルの別の臨床機器に関連付けられている隣接しておりかつ同一である検体−搬送モジュールに、選択された検体−容器ラックを移送するようになっている。吸引のために検体を提供することと、機器の相互間で検体を移送することとの両方のために、同一の搬送システムが使用されるので、従来技術の特徴であるような2つの互いに独立した搬送が不要である。検体−搬送モジュールが、磁力によって支持表面全体にわたって互いに垂直な方向にラックを前進させるためにラック−支持表面の下で動作する磁気X/Y搬送システムを含むことが好ましい。
【解決手段】このモジュールは、作業セル内の関連した機器の検体−吸引プローブに対して相対的に個々の検体−容器ラックを搬送するようになっており、および、作業セルの別の臨床機器に関連付けられている隣接しておりかつ同一である検体−搬送モジュールに、選択された検体−容器ラックを移送するようになっている。吸引のために検体を提供することと、機器の相互間で検体を移送することとの両方のために、同一の搬送システムが使用されるので、従来技術の特徴であるような2つの互いに独立した搬送が不要である。検体−搬送モジュールが、磁力によって支持表面全体にわたって互いに垂直な方向にラックを前進させるためにラック−支持表面の下で動作する磁気X/Y搬送システムを含むことが好ましい。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動化された多機器臨床作業セル(multi−instrument clinical workcell)内での検体−容器の搬送のための装置における改良に関する。さらに特に、本発明は、個別の機器の検体−吸引プローブに検体−容器を提供することと、かつ、作業セル内の互いに隣接する機器の互いに同一の検体−搬送モジュールの間を検体−容器を搬送することとの両方の働きをする、臨床作業セルの様々な異なる検体−処理機器の各々と共に使用するようになっているモジュール型の検体−搬送システムに関する。
【背景技術】
【0002】
様々な自動化された臨床機器を使用して、例えば全血、血清、尿、脊髄液等のような様々な液体の生物検体に対して診断検査を行うことが当業で公知である。全血検体の分析においては、例えば、この自動化された機器は、(i)異なる血液細胞タイプのそれぞれの物理的特性、電気的特性、および/または、光散乱特性に基づいて、その異なる血液細胞タイプを計数および/または識別する働きをする血液学機器と、(ii)光学フローセルを通過する個々の細胞に照射することと、分析の前に対象の細胞が共役または染色させられている特定の蛍光色素の蛍光発光を検出することとによって異なる細胞タイプを識別する働きをする蛍光流動細胞測光機器とを含むだろう。血液−分析作業セルで使用できる他の自動化された機器が、後続の顕微鏡分析のために選択された検体の光学スライドガラスを自動的に調製する働きをする検体スライドメーカである。これらの機器のすべては、共通して、処理のために検体を吸引する目的で検体−容器の中に垂直に移動するようになっている、可動的に取り付けられている吸引プローブを有する。これらの異なる機器は、互いに独立して動作することが可能であるが、共通の(典型的にはマイクロプロセッサ制御の)システムコントローラが得られるべき特定の結果に基づいて特定の検体に対する個々の機器の動作を制御する働きをする多機器「作業セル」を集合的に形成するように一体化され、すなわち、互いに連結されることが可能である。
【0003】
臨床機器によって分析されるべき生物検体は、一般的に、様々なタイプの密封された試験管または容器の中に収集され、これらの各々は、通常は、各機器の上述の吸引プローブが処理のための所望の一定分量の検体をそのゴムキャップを貫通して出し入れすることが可能な穿孔可能なキャップを有する。典型的には、バーコードの形態の符号化された患者情報および試験情報を各々が備えている5つまたは6つの検体容器が、単一のラックすなわち取り枠によって吸引のために支持される。作業セル環境内では、検体−容器ラックは、コンベヤシステムによって臨床機器の間を搬送される場合が多い。コンベアシステムは、臨床機器から間隔を置いている検体−装入ステーションにおいて検体のラックを受け取って、作業セルのシステムコントローラによって決定される通りに、行われるべき検査または処理に応じて、異なる臨床機器に対してラックを出し入れする形で選択的に搬送する働きをする。あるいは、ラック、または、ラック内の個々の容器が、ロボットアームによって異なる臨床機器に対して搬送され、または、異なる臨床機器から搬送されてもよい。どちらの場合とも、機器間の搬送が故障する場合には、作業セル全体が動作を停止するということが理解されるだろう。
【0004】
最も多くの場合に、臨床機器が、その臨床機器内で検体−容器を受け取って前進させるためのその臨床機器自体の一体的な検体−搬送システムを有する。これらの標本−搬送システムは、機器毎にその機械的構造が大きく異なっている。この結果として、こうした標本−搬送システムは、作業セル構成の中へ一体化される場合に問題をもたらす可能性がある。
【0005】
米国特許第6,444,472号と同第5,720,377号は、検体が吸引されるかまたは他の形で処理されることが可能な場所に検体−容器ラックを提供するために、様々な臨床機器と共に使用されるようになっている2つの異なるモジュール型搬送システムを開示している。これらのラック−搬送システムの各々は、処理されるべき検体−容器ラックを受け取って位置合せするための投入待ち行列と、処理(例えば、収容検体の吸引)のために容器を提供するように、ラックが投入待ち行列内で位置合せされる方向に対して垂直な方向においてラックがその前後送りセクションに移動させられる前後送りセクションと、収容検体が処理され終わっている容器ラックを受け取るための排出待ち行列とを備えるスタンドアロン型のユニットである。’472特許では、ラック搬送モジュールが、前後送りセクション内に位置した検体ラックから1回に1つずつ各々の個々の検体−容器を取り除く働きをし、かつ、処理のために1つまたは複数の臨床機器に個々の容器を搬送する働きをするロボットアームと組み合わせて使用される。検体の処理の後に、ロボットアームは、処理機器において各々の検体−容器に再係合し、および、後で排出待ち行列に前進させられるラック内の空の容器−開口にその検体−容器を戻すようにプログラムされている。精密で複雑な「移動ビーム」機構が、その支持表面の上方に容器ラックの各々を物理的に持ち上げて、投入待ち行列と排出待ち行列と前後送りセクションとの中で増分距離だけラックを前進させるために使用される。したがって、’472特許の検体−容器搬送モジュールは、投入待ち行列から、検体−容器が処理のためにロボットアームによって接近されることが可能な場所へと、単純に検体−容器ラックを前進させる働きをするだけである。このモジュール自体は、処理のために機器に検体−容器を提供する働きもしないし、検体−容器を他のモジュールに搬送するために他のモジュールとインタフェースする働きもしない。
【0006】
上述の’377特許では、標本−搬送モジュールが、投入待ち行列から、選択された容器から検体が吸引されることができる場所に検体−容器ラックを搬送する働きをする。その次に、容器のラックが、取り出しを待機するために出口待ち行列に放出される。磁気搬送システムが、ラックが手動で装入される投入位置から、各々のラックが検体吸引ステーションに機械的に移動させられることが可能な場所へ、投入待ち行列内の直線経路に沿って検体−容器ラックを前進させるために使用される。投入待ち行列から外に出て検体−吸引位置の中に入るラックの移動は、一連の外方に延びるパドル(paddle)を有するコンベアベルトによって引き起こされる。ベルトが前進するのにつれて、個々のパドルが容器の側部に係合し、これによって1度に1つずつの容器の形でラックの移動を割り出しする。検体の吸引と検査の後に、検体−容器ラックが、ラックの端縁に係合してそのラックを排出待ち行列の中に押し込む働きをするプッシャ機構によって検体−処理セクションの外に機械的に押し出される。そこでは、割り出し機構がラックを取り出し位置に前進させる。’377特許の検体−搬送モジュールは、例えば多機器作業セルで使用される臨床機器のような異なる臨床機器に検体−容器を提供するために有用であり得るが、完全に自動化された作業セルの臨床機器を連結させるために必要であるように、どのように1つのモジュールから別のモジュールに検体−容器ラックが搬送されることが可能であるかということに関しては、この特許は言及していない。恐らくは、この機能を実現するためにロボットアームまたは他の何らかの独立したコンベヤシステムが使用されるだろう。当然のことであるが、こうしたアプローチは、作業セルに多大なコストと複雑性とを加えるだろう。
【発明の概要】
【発明が解決しようとする課題】
【0007】
上述の考察を考慮して、本発明の目的が、モジュール型の検体−搬送装置が直接的に関連付けられている個別の臨床機器の検体提供要件(specimen presentation need)を満たすことが可能であるだけでなく、検査および/または処理のための作業セルの個別の機器の相互間で検体が搬送されなければならない多機器作業セルの検体搬送要件(specimen transport need)を満たすことも可能であるモジュール型の検体−搬送装置を提供することである。
【0008】
本発明の別の目的が、多機器臨床作業セルの互いに隣接する機器の間で検体−容器を搬送するためのロボットアームと他の独立した検体−搬送との必要を排除する、検体−搬送モジュールを提供することである。
【課題を解決するための手段】
【0009】
本発明の第1の側面によって、多機器臨床作業セルの複数の検体−処理機器の各々と共に使用するようになっている検体−搬送モジュールが提供される。このモジュールは、(i)複数の検体−容器ラックを受け取って支持するための投入バッファと、(ii)関連した検体−処理機器の吸引プローブによって接近されるべき位置に検体−容器ラックを支持するための検体−吸引ステーションと、(iii)このモジュールからラックが取り除かれるべき位置で複数のラックを支持するための排出バッファと、(iv)別の検体−処理機器に関連付けられている隣接した同一の検体−搬送モジュールの対応するラック−移送ステーションに搬送されるべき場所において個別の検体−容器ラックを支持するためのラック−移送ステーションとを画定するハウジングを備える。本発明の検体−搬送モジュールは、さらに、モジュールハウジングの上述のバッファとステーションとの間で個々の検体−容器ラックを搬送するための検体−搬送システムを含む。特に好ましい実施態様では、検体−搬送システムは、モジュールハウジング内で互いに垂直な方向にラックを選択的に搬送するために磁力によってラックと相互作用するX/Y磁気搬送システムを備える。モジュールハウジングが、さらに、モジュールに直接的に関連付けられている機器による検体−吸引の前に、検体ラックが処理される(例えば、検体を均一に混合するために繰り返し反転される)ことが可能な検体−処理ステーションを画定することも好ましい。
【0010】
本発明の第2の側面によって、モジュール型の多機器臨床作業セルが提供される。この作業セルは、(i)その臨床機器の各々に関連付けられている吸引プローブに提供される液体の生物検体を処理するようになっている少なくとも2つの臨床機器と、(ii)臨床機器の各々に1つが作動的に関連付けられている、同じ数の同一でかつ互いに隣接している検体−搬送モジュールとを備える。本発明によって、検体−搬送モジュールの各々は、(a)関連付けられている機器の検体−吸引プローブが検体−容器に接近して検体−容器から検体を吸引することが可能である位置に個々の検体−容器ラックを搬送する機能と、(b)隣接した検体−搬送モジュールのX/Y可動検体−搬送システムによって搬送ラックが作用を受けかつさらに搬送されることが可能である位置に個々の検体−容器ラックを搬送する機能の両方を果たす、X/Y可動検体−搬送システムを備える。
【0011】
したがって、両方の機能、すなわち、吸引のために検体を提供する機能と、1つの機器から別の機器に検体を移送する機能とを果たすために、同じ検体−搬送システムを使用することによって、これらの作業を行うために2つの互いに独立した搬送を必要とする従来技術の要件が取り除かれ、および、より単純でより信頼性が高い作業セルが結果的に得られる。本発明の検体−搬送モジュールが、単独で動作する作業セルのあらゆる個別の臨床機器の検体提供要件に関する機能性において完全であるだけでなく、隣接した同一の検体−搬送モジュールに検体−容器を搬送し、および、この検体−搬送モジュールから検体−容器を受け取ることも可能であり、これによって複数の検体−搬送モジュールが作業セルのための検体−搬送システムとして集合的に機能するということが理解されるだろう。
【0012】
本発明の第3の側面では、本明細書で説明されている検体−搬送モジュールは、多機器臨床作業セルの互いに隣接するモジュールの間で検体−容器ラックを搬送するための複数の独立した検体ラック−搬送機構を備えている。したがって、本発明の別の好ましい実施態様では、上述の1次ラック−搬送機構とは無関係である冗長ラック−搬送機構が、モジュールの第1および第2のラック−移送ステーションの間で個々の検体−容器ラックを搬送するために設けられており、これによって、1次搬送システムまたはこれに関連した臨床機器の故障の発生時に必要とされる可能性があるように、個々の検体−搬送モジュールがバイパスされることが可能であり、このことが、こうした故障にも係わらずに作業セルが機能し続けることを可能にする。
【0013】
本発明の第4の側面によって、検体−容器ラックによって支持されている複数の検体−容器の1つによって各々が収容されている複数の生物検体を同時に混合するための新しくかつ改良された装置が提供される。この装置は、そのラック−係合部材に接触するように動かされる検体−容器ラックに着脱自在に係合するための可動的に取り付けられているラック−係合部材と、収容されている検体が完全に混合されるように、係合されたラックの検体容器を反復的に反転および再反転させるのに十分な長さの弓形経路に沿ったラック−係合部材の往復移動を実現するための手段とを含む。混合装置の可動的に取り付けられているラック−係合部材と検体容器ラックとの間に確実な係合を実現するために、舌片−溝(tongue−in−groove)タイプの係合がこれらの要素の間に生じさせられ、および、検体混合動作中にラック−係合部材とこれに係合されたラックとの間の係合解除を生じさせる傾向があるあらゆる振動力または他の力を克服する力をラック−係合部材と検体−容器ラックとの間に及ぼすために磁気部材が使用されることが好ましい。
【0014】
本発明の第5の側面によって、本明細書に説明されているタイプの検体−搬送モジュールの投入バッファは、そのバッファ内の出口位置に向かって投入待ち行列に沿って検体−容器ラックのスタックを前進させる働きをするカム駆動プッシャ機構を備えている。このプッシャ機構が、そのバッファの前部に向かって1対の可動的に取り付けられているプッシャ指片を前進させる傾向がある力がこれらの指片上に及ぼされる時に、そのプッシャ指片がそのバッファの中に延びることが引き起こされ、および、反対の方向にその指片上に力が及ぼされる時にそのプッシャ指片がそのバッファから後退することが引き起こされる、1対の可動的に取り付けられているプッシャ指片を備える。
【0015】
本発明のさらに別の側面によって、本明細書に説明されているタイプの検体−搬送モジュールの排出バッファは、装入位置からその排出バッファの末端の取り出し位置に向かって処理済みのラックを押すようになっている可動的に取り付けられているラック−押し部材を備える。この部材の駆動力が、検体−搬送モジュールの検体−処理部分全体にわたって検体−容器ラックを搬送するために使用される同一のX/Y可動トラック(X/Y movable truck)によって提供されることが好ましい。処理済みのラックが、ラックの幅よりもわずかに大きい距離だけ排出バッファの中に押し込まれ、このことが、そのモジュールの検体−処理部分内でラックを搬送するために使用される同一のラック−搬送方式(例えば、磁力)を使用して、例えば、対象の検体に対する反復検査またはリフレックス(reflex)検査を行うために、X/Y可動トラックがこのラックの排出待ち行列内の最後の検体−容器ラックを取り出すことを可能にすることが好ましい。ラックが排出バッファ内に押し込まれる毎に、排出バッファの取り出し位置に向かって排出待ち行列全体を前進させるのに十分な力によって、この押し込みが行われる。
【0016】
本発明とその様々な側面と利点とが、同じ照合文字が同じ部品または構成要素を示す添付図面を参照しながら、後続の好ましい実施形態の詳細な説明からより適切に理解されるだろう。
例えば、本発明は以下を提供する。
(項目1)
(a)モジュール型の多機器臨床作業セルの複数の検体−処理機器の各々の検体−吸引プローブに対して検体−容器の個々のラックを相対的に移動させるために、および、(b)前記作業セルの互いに隣接する検体−処理機器の互いに隣接する検体−搬送モジュールの間で前記検体−容器ラックを搬送するための、前記作業セルの前記複数の検体−処理機器の各々と共に使用するようになっている検体−搬送モジュールであって、
(a)ハウジングであって、(i)このハウジングに提供される複数の検体−容器ラックを受け取って支持するための投入バッファと、(ii)関連した検体−処理機器の前記吸引プローブによって接近されるべき位置で検体−容器ラックを支持するための検体−吸引ステーションと、(iii)前記モジュールから取り除かれるべき位置で複数のラックを支持するための排出バッファと、(iv)個々の検体−容器ラックが、隣接する検体−搬送モジュールによって接近されて前記検体−搬送モジュールに移送されることが可能であるラック−移送ステーションとを画定するハウジングと、
(b)前記投入バッファと検体−吸引ステーションと排出バッファとラック−移送ステーションとの間で前記ラックを搬送するための、前記検体−容器ラックの各々に作動的に連結可能である1次ラック−搬送機構と、を備える検体−搬送モジュール。
(項目2)
前記1次ラック−搬送機構は、前記検体−処理セクション内でラックを選択的に搬送するために磁力によって前記ラックと相互作用する磁気搬送システムを備える項目1に記載の検体−搬送モジュール。
(項目3)
前記磁気搬送システムは、平面内で互いに垂直な方向に前記ラックを選択的に搬送するようになっているX/Y可動磁界発生手段を備える項目2に記載の検体−搬送モジュール。
(項目4)
前記1次ラック−搬送機構は、前記ラック−移送ステーションにおいて前記ハウジングの外側に検体−容器ラックの一部分を搬送するようになっている項目1に記載の検体−搬送モジュール。
(項目5)
前記ハウジングは、吸引の前にそのそれぞれの容器内の検体を混合するための検体−混合装置を支持する項目4に記載の検体−搬送モジュール。
(項目6)
前記検体−混合装置は、そのそれぞれの容器内の検体を混合するために検体−容器ラックを選択的に反転させるための手段を備える項目5に記載の検体−搬送モジュール。
(項目7)
前記反転手段は前記ハウジング上に可動的に取り付けられているプレートを備え、前記プレートは、検体−容器ラックに着脱自在に係合するための手段を有し、および、前記プレートは、係合されたプレートの前記検体−容器内の検体が反転させられて混合されるほどまでに弓形の経路に沿って移動可能である項目6に記載の検体−搬送モジュール。
(項目8)
前記ハウジングは、個々の検体−容器ラックが2つの互いに隣接する検体−搬送モジュールに搬送されおよびこれらの検体−搬送モジュールから受け取られることが可能である第1および第2のラック−移送ステーションを画定し、および、前記ラック−搬送機構は、前記第1および第2のラック−移送ステーションの間で個々の検体−容器ラックを搬送するように選択的に動作可能である項目1に記載の検体−搬送モジュール。
(項目9)
前記第1および第2のラック−移送ステーションの間で個々の検体−容器ラックを搬送するための、前記1次ラック−搬送機構から独立している、2次ラック−搬送機構をさらに備える項目8に記載の検体−搬送モジュール。
(項目10)
(i)その臨床機器の各々に関連付けられている検体−吸引プローブに提供される液体の生物検体を処理するようになっている少なくとも2つの臨床機器と、(ii)前記臨床機器の各々に1つが作動的に関連付けられている、同じ数の同一の検体−搬送モジュールとを備えるモジュール型の多機器臨床作業セルであって、前記検体−搬送モジュールの各々は、
(a)(i)関連した機器の前記検体−吸引プローブ及び、(ii)前記作業セルの隣接した検体−処理機器の隣接した検体−搬送モジュールに個々の検体−容器ラックが移送可能であるラック−移送ステーションとに対して、個々の検体−容器ラックを選択的に提供するための1次検体−搬送手段と、(b)隣接した機器から、または、外側の供給源から、検体容器ラックを受け取るための手段と、(d)関連した機器によって処理された検体−容器ラックを格納するための手段と、
を備えるモジュール型の多機器臨床作業セル。
(項目11)
前記受け取り手段は、それに提供される複数の検体−容器ラックを受け取って支持するための投入バッファを備え、および、前記格納手段は、前記検体−吸引プローブに各々が提供され終わった後に複数のラックを支持するための排出バッファを備える項目10に記載の装置。
(項目12)
前記1次ラック−搬送機構は、前記検体−処理セクション内でラックを選択的に搬送するために磁力によって前記ラックと相互作用する磁気搬送システムを備える項目10に記載の装置。
(項目13)
前記磁気搬送システムは、平面内で互いに垂直な方向に前記ラックを選択的に搬送するようになっているX/Y可動磁界発生手段を備える項目12に記載の装置。
(項目14)
前記1次ラック−搬送機構は、関連したモジュールの前記ハウジングの外側の位置に検体−容器ラックの一部分を搬送するようになっており、および、隣接した機器の隣接した検体−搬送モジュールは、前記搬送されたラック部分を受け取って前記隣接した検体−搬送モジュール内の位置に前記ラック部分の関連したラックを前進させるように位置決めされている項目10に記載の装置。
(項目15)
前記検体−搬送モジュールの各々はそのそれぞれの容器内の検体を混合するための検体−混合機構を備える項目14に記載の装置。
(項目16)
前記検体−混合機構は、そのそれぞれの容器内の検体を混合するために前記検体−容器ラックを選択的に反転させるための手段を備える項目15に記載の装置。
(項目17)
前記ハウジングは、個々の検体−容器ラックが2つの互いに隣接する検体−搬送モジュールに搬送されおよびこれらの検体−搬送モジュールから受け取られることが可能である第1および第2のラック−移送ステーションを画定し、および、前記ラック−搬送機構は、前記第1および第2のラック−移送ステーションの間で個々の検体−容器ラックを搬送するように選択的に動作可能である項目10に記載の装置。
(項目18)
前記第1および第2のラック−移送ステーションの間で個々の検体−容器ラックを搬送するための、前記1次ラック−搬送機構から独立している、2次ラック−搬送機構をさらに備える項目16に記載の検体−搬送モジュール。
(項目19)
容器−ラックによって支持されている複数の容器の1つによって各々が収容されている複数の異なる液体を同時に混合する装置であって、
(a)混合ステーションにおいてそのラック−係合部材と接触するように移動される容器ラックに着脱自在に係合するようになっている可動的に取り付けられているラック−係合部材と、
(b)収容されている液体が完全に混合されるように、前記ラック−係合部材がその弓
形の経路に沿って移動する時に、係合されたラックの前記検体容器を反転させるように形成されている弓形の経路に沿って反対方向に前記ラック−係合部材を反復的に前進させるための手段と、
を備える装置。
(項目20)
前記ラック−係合部材は、前記混合ステーションにおいて前記容器とラック−係合部材との接触表面の間でスライド移動が生じさせられる時に、容器ラックの壁の中に形成されている1対の互いに間隔が開けられたノッチに係合するようになっている舌片部材を備える項目19に記載の装置。
(項目21)
前記可動的に取り付けられているラック−係合部材と前記容器ラックとの間に磁気吸引を生じさせるための手段が設けられており、および、前記吸引は、係合されたラックから前記ラック−係合部材を分離させる傾向があるあらゆる力を克服するように作用する請求項19に記載の装置。
(項目22)
前記経路は、約135度の円弧を経て延びる弓形の経路である項目19に記載の装置。(項目23)
前記前進手段は、前記ラック−係合部材に直接的に係合されている回転駆動される駆動軸を有する双方向モータを備える項目22に記載の装置。
(項目24)
関連した検体−搬送モジュールによって1つずつ逐次的に搬送されることになっている複数の検体−容器ラックを受け取って一時的に格納するための投入バッファであって、
(a)直線待ち行列の形に配列された複数の検体−容器ラックを受け取って支持するためのラック支持表面と、
(b)前記表面から上方に延びる1対の互いに間隔を置いた互いに平行な側壁であって、前記側壁の相互間の隙間によって画定されている直線経路に沿って、ラック−装入位置からラック−搬送位置に前記待ち行列の各検体−容器を案内する働きをする1対の互いに間隔を置いた互いに平行な側壁と、
(c)前記直線経路に沿って前記表面によって支持された1つまたは複数の検体−容器ラックを前進させるためのラック−押し機構であって、(1)(i)前記側壁内に形成されている直線走路内でのスライド移動のための、(ii)前記隙間内で検体−容器ラックの表面に駆動的に係合するために前記側壁の間の前記隙間内にそのプッシャ指片が位置している伸長位置と、前記前記隙間の外側に位置している引っ込み位置との間の旋回移動とのための、前記側壁の一方の上に可動的に取り付けられているプッシャ指片と、(2)前記走路内でどちらかの方向に前記プッシャ指片を選択的に前進させるための双方向モータと、(3)前記モータが第1の方向に動作する時に前記プッシャ指片をその伸長位置に向かって旋回させるために、および、前記双方向モータが反対方向に動作する時に前記プッシャ指片をその引っ込み位置に向かって旋回させるための、前記双方向モータに作動的に連結されている手段とを備えるラック−押し機構と、
を備える投入バッファ。
(項目25)
検体−搬送モジュールの検体−処理部分を通して検体−容器ラックを搬送するためのX/Y可動トラックを備えるタイプの自動化された検体−搬送モジュールによって搬送される複数の検体−容器ラックを受け取って一時的に格納するための排出バッファであって、
(a)直線待ち行列の形に配列された複数の検体−容器ラックを受け取って支持するためのラック−支持表面と、
(b)前記表面から上方に延びる1対の互いに間隔を置いた互いに平行な側壁であって、前記側壁の間の隙間によって画定されている直線経路に沿って、前記排出バッファの入口からラック−取り外し位置に前記待ち行列の各検体−容器を案内する働きをする1対の互いに間隔を置いた互いに平行な側壁と、
(c)前記直線経路に沿って前記表面によって支持されている1つまたは複数の検体−容器ラックを前進させるためのラック−押し機構であって、(i)(1)前記排出バッファ入口に位置している検体−容器ラックの表面にこのラック−押し機構が駆動的に係合する第1の位置から、(2)このラック−押し機構が、検体−容器ラックの幅よりもわずかに大きい距離だけ前記経路に沿って、係合された検体−搬送ラックを移動させ終わっている第2の位置にスライドする形で移動可能である可動的に取り付けられているラック押し部材を備え、および、前記X/Y搬送システムのX/Y移動に応答して移動可能であるラック−押し機構と、
を備える排出バッファ。
(項目26)
検体−容器によって保持されている検体を処理するためのモジュール型機器システムであって、
(a)検体−容器から抜き出された検体の少なくとも一部分を処理するための検体−処理構成要素であって、この検体−処理構成要素に作動的に関連付けられている検体−抜き出しステーションを含む検体−処理構成要素と、
(b)(i)前記検体−抜き出しステーションへ、および、前記検体−抜き出しステーションから、および、(ii)(1)容器がこの容器−搬送構成要素から遠ざかるように移送されるように位置させられており、および、(2)容器が、この容器−搬送構成要素による搬送のためにこの容器−搬送構成要素によって受け取られる、1対の互いに間隔を置いた容器−移送場所の各々に、および、これらの容器−移送場所の各々から、検体−容器を搬送するように構成されている容器−搬送構成要素とを備えるモジュール型機器システム。
(項目27)
前記容器−搬送構成要素は、(a)(i)前記検体−抜き出しステーションに、および、前記検体−抜き出しステーションから、および、(ii)前記対の容器−移送場所のどちらかに、および、前記対の容器−移送場所のどちらかから、検体−容器を搬送するための1次搬送システムと、(b)前記対の容器−移送場所の間で検体−容器を搬送するための、前記1次搬送システムから独立している、2次搬送システムとを備える項目1に記載のモジュール型機器システム。
(項目28)
前記容器−搬送構成要素は、前記容器−搬送構成要素による搬送中に容器を支持する容器−支持表面を含み、および、前記容器−搬送構成要素は、(i)各々の容器−移送場所において前記容器−支持表面を少なくとも部分的に越えて延びるように検体−容器を位置させるように、および、(ii)各々の検体−移送場所において前記容器−支持表面上に部分的にだけすでに位置させられている検体−容器を受け取るように構成されている請求項1に記載のモジュール型機器システム。
(項目29)
前記容器−移送場所における検体−容器の位置決めを信号伝送するために各々の容器−移送場所に配置されているセンサをさらに備える項目1に記載のモジュール型機器システム。
(項目30)
前記容器−搬送構成要素は、(i)複数の検体容器を受け取って格納するように、および、(ii)前記容器−搬送構成要素による取り除きと搬送とのための位置に各々の受け取られた検体−容器を前進させるように構成されている投入バッファを備える項目1に記載のモジュール型機器システム。
(項目31)
前記容器−搬送構成要素は、(i)複数の検体−容器を受け取って格納するように、および、(ii)取り外しのための前記排出バッファ内の位置に各々の受け取られた検体容器を前進させるように構成されている排出バッファを備える項目1に記載のモジュール型機器システム。
(項目32)
前記容器−搬送構成要素は、(i)複数の検体−容器を受け取って格納するように、および、(ii)取り外しのための前記排出バッファ内の位置に各々の受け取られた検体容器を前進させるように構成されている排出バッファを備える項目5に記載のモジュール型機器システム。
(項目33)
前記容器−搬送構成要素は、各々の移送場所において少なくとも部分的に前記検体−容器搬送構成要素を越えて延びるように検体−容器を位置させることによって、各々の移送場所において前記容器−搬送構成要素から検体−容器を移送するように、および、各々の容器−移送場所において前記容器−搬送構成要素の少なくとも外側にある検体−容器を受け取って搬送することによって、各々の容器−移送場所において前記機器システムの外側から検体−容器を受け取るように、構成されている項目7に記載の機器システム。
(項目34)
前記容器−搬送構成要素は、(a)(i)前記検体−抜き出しステーションに、および、前記検体−抜き出しステーションから、および、(ii)前記対の容器−移送場所のどちらかに、および、前記対の容器−移送場所のどちらかから、検体−容器を搬送するための1次搬送システムと、(b)前記対の容器−移送場所の相互間で検体−容器を搬送するための、前記第1の搬送システムから独立している、2次搬送システムとを備える項目8に記載のモジュール型機器システム。
(項目35)
作業セルであって、
(a)検体容器によって保持されている検体を処理するための第1の機器システムであって、
(i)検体−容器から抜き出された検体の少なくとも一部分を処理するための検体−処理構成要素であって、この検体−処理構成要素に作動的に関連付けられている検体−抜き出しステーションを含む検体−処理構成要素と、
(ii)(1)前記検体−抜き出しステーションに、および、前記検体−抜き出しステーションから、および、(2)各々において(A)容器がこの容器−搬送構成要素から遠ざかる形で移送されるように位置させられており、および、(B)容器がこの容器−搬送構成要素による搬送のためにこの容器−搬送構成要素によって受け取られる、第1の容器−移送場所と第2の容器−移送場所との各々に、または、前記第1の容器−移送場所と前記第2の容器−移送場所との各々から、検体−容器を搬送するように構成されている容器−搬送構成要素とを含む第1の機器システムと、
(b)検体容器によって保持されている検体を処理するための第2の機器システムであって、
(i)(1)容器がこの容器−搬送構成要素から遠ざかる形で移送されるように位置させられており、および、(2)容器がこの容器−搬送構成要素による搬送のためにこの容器−搬送構成要素によって受け取られる容器−移送場所に、および、前記容器−移送場所から検体−容器を搬送するように構成されている容器−搬送構成要素を含む第2の機器システムと、を含む作業セルにおいて、
(c)前記第1の機器システムと前記第2の機器システムは、前記第1の機器システムの第1の容器−移送場所と前記第2の機器システムの前記容器−移送場所とが互いに隣接しているように構成されており、かつ、互いに隣接して位置させられており、
これによって、前記第1の機器システムの前記検体−容器搬送機構と前記第2の機器システムの前記検体−容器搬送機構とが、追加の移送装置なしに互いの間を検体容器を通過させる、
作業セル。
(項目36)
(a)検体容器によって保持された検体を処理するための第3の機器システムであって、(i)(1)容器がこの容器−搬送構成要素から遠ざかる形で移送されるように位置させられており、および、(2)容器がこの容器−搬送構成要素による搬送のためにこの容器−搬送構成要素によって受け取られる容器−移送場所に、および、前記容器−移送場所から、検体−容器を搬送するように構成されている容器−搬送構成要素と、
(b)前記第1の機器システムの前記第1および第2の容器−移送場所は互いに離れており、
(c)前記第1の機器システムと前記第3の機器システムは、前記第1の機器システムの前記第2の容器−移送場所と前記第3の機器システムの前記容器−移送場所とが互いに隣接しているように、構成されており、かつ、互いに隣接して位置させられており、
これによって、前記第1の機器システムの前記検体−容器搬送機構が、追加の移送装置なしに、前記第2の機器システムと前記第3の機器システムとの前記検体−容器搬送機構に、および、この前記検体−容器搬送機構から、検体容器を通過させるをさらに含む項目10に記載の作業セル。
(項目37)
(a)前記第1の機器システムの前記容器−搬送構成要素は、(i)複数の検体容器を受け取って格納するように、および、(ii)前記第1の機器システムの前記容器−搬送構成要素による取り除きと搬送とのための位置に各々の受け取られた検体−容器を前進させるように構成されている、投入バッファをさらに備え、
(b)前記第2の機器システムの前記容器−搬送構成要素は、(i)複数の検体容器を受け取って格納するように、および、(ii)前記第2の機器システムの前記容器−搬送構成要素による取り除きと搬送とのための位置に各々の受け取られた検体−容器を前進させるように構成されている、投入バッファをさらに備え、
これによって、検体容器が、前記第1および第2の機器システムの両方の投入バッファ内において前記作業セルの中に送り込まれる項目10に記載の作業セル。
(項目38)
(a)前記第1の機器システムの前記容器−搬送構成要素は、(i)複数の検体容器を受け取って格納するように、および、(ii)取り出しのために前記排出バッファ内の位置に各々の受け取られた検体−容器を前進させるように構成されている排出バッファをさらに備え、
(b)前記第2の機器システムは、(i)複数の検体容器を受け取って格納するように、および、(ii)取り出しのための前記排出バッファ内の位置に各々の受け取られた検体−容器を前進させるように構成されている、排出バッファをさらに備え、
これによって、検体容器が、前記第1および第2の機器システムの両方の排出バッファから前記作業セルから取り除かれる項目12に記載の作業セル。
(項目39)
(a)前記第1の機器システムの前記容器−搬送機構は、各々の移送場所において少なくとも部分的に前記第1の機器システムの前記検体−容器搬送機構を越えて延びるように前記検体−容器を位置させることによって、各々の移送場所において前記第1の機器システムから検体容器を移送するように、および、各々の移送場所において前記第1の機器システムの少なくとも外側にある検体容器を受け取って搬送することによって、各々の移送場所において前記第1の機器システムの外側から検体−容器を受け取るように、構成されており、
(b)前記第2の機器システムの前記容器−搬送機構は、各々の移送場所において少なくとも部分的に前記第2の機器システムの前記検体−容器搬送機構を越えて延びるように前記検体−容器を位置させることによって、前記移送場所において前記第2の機器システムから検体容器を移送するように、および、各々の移送場所において前記第2の機器システムの少なくとも外側にある検体容器を受け取って搬送することによって、前記移送場所において前記第2の機器システムの外側から検体−容器を受け取るように、構成されており、
(c)前記第1の機器システムと前記第2の機器システムは、前記第1の機器システムの前記検体−容器搬送機構が前記第2の機器の前記移送位置において前記第1の機器システムの前記検体容器搬送機構を越えて延びるように前記第1の移送場所に検体容器を位置させ、および、前記第2の機器システムの前記検体−容器搬送機構は、前記第1の機器システムの前記第1の移送場所において前記第2の機器システムの前記検体−容器搬送機構を越えて延びるように前記移送場所に検体容器を位置させ、
これによって、検体容器は、前記第1および第2の機器システムの前記検体−容器搬送機構によって前記第1の機器と前記第2の機器システムとの間で搬送される項目10に記載の作業セル。
(項目40)
多機器システム作業セルの機器システムの間で検体−容器を搬送する方法であって、
(a)検体容器がこの検体−容器搬送構成要素によって受け取られ、および、この検体−容器搬送構成要素から移送される2つの移送場所の各々に、および、この2つの移送場所から検体容器を搬送するための検体−容器搬送構成要素を、複数の機器システムの各々に提供することと、
(b)互いに隣接する機器システムの移送場所が互いに検体−容器を送りおよび互いから検体容器を受け取るように前記多機器システム作業セルの少なくとも1つの他の機器システムに隣接して各々の機器システムを位置させることと、
(c)前記多機器システム作業セルの開始機器システムの検体−容器搬送構成要素による搬送のために使用可能である検体容器を識別することと、
(d)前記作業セルの所望の行き先機器システムを識別することと、
(e)前記作業セルの隣接した受け取り機器システムに対して前記識別された検体容器を移送することを前記開始システムの前記搬送構成要素に生じさせることと、
(f)前記隣接した受け取り機器システムの前記搬送構成要素が前記識別された検体容器を受け取ることを生じさせることと、
(g)前記受け取り機器システムが前記所望の行き先機器システムであるかどうかを判定することと、
(h)前記受け取り機器システムが前記所望の行き先機器システムではない時に、隣接した機器に対して前記識別された検体容器を前記受け取り機器の前記搬送構成要素が移送することを生じさせることと、
(i)前記検体容器が前記所望の行き先機器システムに移送されるまで、段階(f)と段階(g)を繰り返すことと、
を含む方法。
(項目41)
(i)各機器システムの前記検体−容器搬送構成要素は、各々の移送場所において前記検体−容器搬送モジュールを少なくとも部分的に越えて延びるように前記検体−容器を位置させることによって検体−容器を移送し、および、前記検体−容器搬送モジュールに部分的にだけ延びる、位置させられている各々の移送場所において検体−容器を受け取り、
(ii)前記機器システムを位置させる段階は、各々の隣接した機器システムの前記検体−容器搬送モジュールの移送場所が前記隣接した検体−容器搬送モジュールの前記検体搬送モジュールの前記移送場所に直ぐに隣接しているように、前記機器システムを位置させることを含み、
これによって、2つの互いに隣接した機器システムは、追加の移送装置なしに、これらの2つの互いに隣接した機器システムの間で検体−容器を移送する項目15に記載の検体−容器を搬送する方法。
【図面の簡単な説明】
【0017】
【図1】図1は、本発明が特に有用である多機器作業セルの略図である。
【図2】図2は、臨床機器と組み合わされている検体−搬送モジュールの側面図である。
【図3】図3は、本発明を実現する検体−搬送モジュールの斜視図である。
【図4】図4は、それぞれに、図3に示されている装置によって搬送される様々な検体−容器ラックの空間的位置をさらに示す、図3に示されている装置の平面図と正面図である。
【図5】図5は、それぞれに、図3に示されている装置によって搬送される様々な検体−容器ラックの空間的位置をさらに示す、図3に示されている装置の平面図と正面図である。
【図6】図6は、1つのモジュールから別のモジュールへの検体−容器ラックの移送を示す多機器作業セルの2つの隣接し合う検体−搬送モジュールの平面図である。
【図7】図7は、図1から図6に示されている検体−搬送モジュールの検体−処理部分内の個々の検体−容器ラックのX/Y位置を制御するための好ましいX/Y駆動機構の斜視図である。
【図8A】図8Aは、図7の装置のY駆動部分の拡大斜視図である。
【図8B】図8Bは、図7の装置のY駆動部分の拡大斜視図である。
【図9】図9は、検体−容器ラックに磁気的に結合するための図7の装置で使用される磁気X/Yトラックの拡大底部斜視図である。
【図10】図10は、複数の検体容器を収容する検体−容器ラックの斜視図である。
【図11A】図11Aは、それぞれに、本発明の磁気検体−搬送システムと共に使用するようになっている好ましい検体−容器ラックの平面正面斜視図と底面背面図である。
【図11B】図11Bは、それぞれに、本発明の磁気検体−搬送システムと共に使用するようになっている好ましい検体−容器ラックの平面正面斜視図と底面背面図である。
【図12】図12は、図11Aと図11Bとに示されているラックの底部部分内に取り付けられるようになっている磁気吸引部材の斜視図である。
【図13】図13は、本発明の検体−搬送モジュールの混合装置に検体−容器ラックを作動的に連結する好ましい嵌合構造を示す。
【図14】図14は、本発明の検体−搬送モジュールの混合装置に検体−容器ラックを作動的に連結する好ましい嵌合構造を示す。
【図15A】図15Aは、概ね直立しておりかつ部分的に反転した位置にある検体−容器ラックの位置を示す、検体−混合装置の斜視図である。
【図15B】図15Bは、概ね直立しておりかつ部分的に反転した位置にある検体−容器ラックの位置を示す、検体−混合装置の斜視図である。
【図16A】図16Aは、検体−混合動作中の4つの異なる時点における検体容器ラックの位置を示す、図15Aおよび図15Bの検体−混合装置の側面図である。
【図16B】図16Bは、検体−混合動作中の4つの異なる時点における検体容器ラックの位置を示す、図15Aおよび図15Bの検体−混合装置の側面図である。
【図16C】図16Cは、検体−混合動作中の4つの異なる時点における検体容器ラックの位置を示す、図15Aおよび図15Bの検体−混合装置の側面図である。
【図16D】図16Dは、検体−混合動作中の4つの異なる時点における検体容器ラックの位置を示す、図15Aおよび図15Bの検体−混合装置の側面図である。
【図17A】図17Aは、本発明の検体−搬送モジュールの投入バッファ部分の後部部分と前部部分のそれぞれの斜視図である。
【図17B】図17Bは、本発明の検体−搬送モジュールの投入バッファ部分の後部部分と前部部分のそれぞれの斜視図である。
【図18A】図18Aは、図17Aおよび図17Bの装置を備える好ましいカム駆動プッシャ装置の拡大斜視図である。
【図18B】図18Bは、図17Aおよび図17Bの装置を備える好ましいカム駆動プッシャ装置の拡大斜視図である。
【図19A】図19Aは、図19Aの装置で使用されるカム部材を示す。
【図19B】図19Bは、図19Bの装置で使用されるカム部材を示す。
【図20A】図20Aは、本発明の検体−搬送モジュールの排出バッファ部分において検体−容器ラックを前進させるための好ましい機構の斜視図である。
【図20B】図20Bは、本発明の検体−搬送モジュールの排出バッファ部分において検体−容器ラックを前進させるための好ましい機構の斜視図である。
【図21】図21は、図20Aおよび図20Bに示されている装置の一部分の拡大斜視図である。
【図22】図22は、互いに隣接する検体−搬送モジュールの間で検体−容器ラックを前進させるための好ましい冗長駆動機構を示す。
【図23】図23は、互いに隣接する検体−搬送モジュールの間で検体−容器ラックを前進させるための好ましい冗長駆動機構を示す。
【発明を実施するための形態】
【0018】
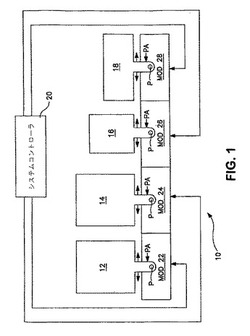
さて、図面を参照すると、図1が、多機器作業セル10に提供される全血検体を分析および/または他の形で処理するようになっている多機器作業セル10を概略的に示している。この検体の各々は、(図10に示されている)検体−容器ラックRによって概ね直立の方向配置かつ直線的な配列の形に追加の容器と共に支持されている試験管または容器Cによって収容されている。図1に示されている作業セルでは、4つの別々の臨床機器12。14、16、18が、共通のマイクロプロセッサベースのシステムコントローラ20の制御を受けて動作する。機器12と機器14は、例えば、全血検体が従来のフローセルの検出アパーチャを通過する時に各セル上で行われるDC体積測定、RF伝導率測定、および/または、光散乱測定に基づいて全血検体の構成成分血液細胞を従来通りの仕方で識別および計数する働きをする血液学機器であってよい。機器14は、例えば、蛍光測定と、全血検体が光学フローセルの検出区域を通過させられる時にその各セル上で行われる光散乱測定、DC体積測定またはRF伝導率測定との組合せに基づいて、細胞タイプを従来通りの仕方で識別する働きをする蛍光流動細胞測光計であってもよい。機器18は、例えば、後で顕微鏡下で分析されることが可能な顕微鏡スライドガラス上の検体スメアを形成して染色するスライドメーカ(slide−maker)/スライドステイナ(slide−stainer)装置であってもよい。これらの臨床機器は、これらの機器が行う作業とこれらの機器の機械的構造との両方において大きく異なることがあり得るが、各々の機器は、その機器ハウジングの外側上に取り付けられており、かつ、したがって吸引の準備が整っている検体容器の提供のために接近可能である、可動的に取り付けられている吸引プローブアセンブリPAを共通して有する。このプローブアセンブリは、処理のために小体積の収容検体を吸引するためにそのアセンブリに提供された検体−容器の中に入るように(図面の平面の中への)垂直方向の移動と、および、検体−容器ラックによって支持されている検体−容器のいずれか1つに中に入るように(矢印によって示されているように)横方向の移動との両方を行うように取り付けられている。
【0019】
作業セル10は、さらに、複数の同一の検体−搬送モジュール(MOD 22、MOD
24、MOD 26、MOD28)を備え、このモジュールの1つは4つの臨床機器12、14、16、18の各々に動作的に連結されているか、または、他の形で関連付けられている。この検体−搬送モジュールの各々は、少なくとも2つの機能を提供する。第1に、このモジュールは、このモジュールが直接的に関連付けられている機器の検体−提供要件のすべてを満たす機能を果たし、すなわち、(i)そのモジュールの投入バッファに手動で配送される検体容器の複数のラックを受け取り、(ii)このラックを、投入バッファから、特定のラックの検体容器のすべてが関連機器の吸引プローブアセンブリにとって接近可能である検体−吸引ステーションに選択的に搬送し、および、(iii)そのラック内の容器のすべてまたは選択された1つからの所望の検体吸引の後に、排出バッファにラックを配送する働きをする。排出バッファへの配送時に、ラックが、そのラックがそのモジュールから手動で取り除かれることが可能な取り除き位置に前進させられてもよく、または、この代わりに、第1の試験結果が特定の標本の第2の吸引が必要とされることを示す場合または、第1の試験結果が明らかに誤りである場合のように、ラックがリフレックス(reflex)試験または反復試験のために検体−吸引ステーションに戻されてもよい。第2に、検体−搬送モジュールの各々は、他の臨床機器に関連付けられている互いに隣接するモジュールの間で検体−容器のラックを移動させ、これによって、例えばロボットアームまたはコンベヤシステムのような独立した検体−移動機構を全く必要とせずに作業セルの全機器が特定の検体を処理することを可能にする機能を果たす。後者の機能を実現するために、これらのモジュールの各々は隣接モジュールに堅固に連結されており、したがって、図6を特に参照して後述するように、これらのモジュールが検体を往復する形で通過させることを可能にする。検体−搬送モジュールの各々が、さらに、第3の機能、すなわち、後続の処理のために検体を調製するという機能を果たすことが好ましい。この標本調製は、その検体−混合装置に提供された検体−容器ラックを反復的に反転させて収容検体を反復的に反転および混合する働きをする検体−混合装置によって実現される。この標本−調製が、処理のためにその関連の機器によって吸引される直前に、検体−容器の内容物を混合する段階を含むことが好ましい。この混合は、検体−容器ラックとそのラックが保持する複数の容器とを反復的に反転させることによって実現される。好ましい検体−混合ステーションの構造上の詳細を、図15Aと図15Bとを参照して後述する。
【0020】
図2の側面図では、検体−搬送モジュール(例えば、MOD 22)とこれに関連した臨床機器(この場合には機器12)との間の関係が示されている。このモジュール/機器組合せの空間要件を最小にするために、この機器は、モジュールハウジングHの主要部分が臨床機器の主ハウジングH′の下に位置することを可能にするように設計されている。この機器の吸引プローブアセンブリPAは、機器ハウジングの前壁32の前方に延び、および、検体−搬送モジュールは、ラックによって支持されている検体−容器Cが、吸引プローブP′の垂直移動平面と一致する共通の垂直平面V内に配置されるように、吸引位置50(図3に示されている)で検体−容器ラックRを選択的に支持する働きをする。このプローブアセンブリの構造および動作の詳細は十分に理解されており、および、本発明の一部を形成しない。しかし、簡単に述べると、このプローブアセンブリの移動は、システムコントローラ20の制御によって動作する3つのステップモータM1、M2、M3によって制御される。ステップモータM1は、垂直平面すなわち図2のZ座標に沿って吸引プローブとストリッパ機構33とを移動させる働きをし、これによってストリッパ機構33の底面33Aが、吸引されるべきサンプルを収容する検体容器の頂部を取り囲むゴムシールS′の上面と接触するように下方に移動させられることが可能である。その次に、ステップモータM3は、プローブアセンブリの吸引プローブP′の垂直位置を制御する働きをし、これによって、プローブ先端が容器内から一定の体積の検体を吸引するためにシールS′に穿孔してその容器の中に入るように、プローブ先端が下方に駆動されることが可能である。その次に、検体の吸引の後に、モータM3は、容器の外に吸引プローブを引き上げる働きをする。吸引プローブが上方に移動するにつれて、ストリッパ機構33は、容器シールと吸引プローブとの間の摩擦力の結果として、上方に移動する吸引プローブがラックの外に容器を持ち上げようとする傾向を阻止するように、静止状態にかつシールS′との接触状態に保持される。プローブ先端が容器シールの頂部から離れると、モータM1は、ストリッパ機構が容器シールから十分に離れている垂直位置にストリッパ機構と吸引プローブの両方を持ち上げる働きをする。第3のステップモータM2は、図3に示されている検体−吸引ステーション50に位置しているラックによって支持されている検体容器の任意の1つに吸引プローブが接近することができるように、横方向すなわち水平平面内において吸引プローブアセンブリを選択的に移動させる働きをする。
【0021】
さらに、図3と図4を参照すると、本発明の検体−搬送モジュールのための好ましい構造が、(i)図11Aと図11Bとに示されているタイプの例えば20個までの検体−容器ラックRを受け取って支持するようになっている投入バッファ40と、(ii)検体吸引および処理のために関連した臨床機器の吸引プローブアセンブリに個々の検体−容器ラックがそれを通して前進させられて提供される検体−処理セクション44と、(iii)検体−容器ラックのそれぞれの検体が処理され終わった後に検体−容器ラックが中に集積される排出バッファ42とを画定する、ハウジングHを備える。投入バッファと排出バッファの各々が、検体−容器ラックがその経路に沿って途中で検体−処理セクション44に向かってまたは検体−処理セクション44から遠ざかるように移動することが可能な図3に矢印Aと矢印Bとでそれぞれに示されている単一の経路を画定するが、ラックは、図3に矢印D、E、Fで示されている3つの異なる経路にどれかに沿って、処理セクションを通過しながら移動することができる。通常は、特定のラックの検体−容器の処理において、ラックが検体−処理経路Dに沿って搬送され、この経路Dにおいてラックが検体−混合ステーション46と上述の検体−吸引ステーション50とを通過する。検体−吸引ステーション50に位置している間は、可動的に取り付けられている検体−混合プレート47は、後述する通りに、検体−吸引プロセスの前にラック内の容器の内容物が完全に混合されるように、位置50に位置している検体−容器ラックを持ち上げて反復的に反転させる働きをする。処理のために検体ラックを別の機器に移送する必要がある場合および時には、そのラックは、モジュールハウジングHの互いに反対側に位置する横方向の端縁に位置している2つのラック−移送ステーション52、54のどちらかにそのラックが位置させられることが可能であるように、経路Eまたは経路Fのどちらかに沿って前進させられる。ハウジングHの前部において、すなわち、モジュールの経路Fに隣接して、そのモジュールの全幅に沿って伸びる細長いハウジング60が設けられている。図22と図23とを参照して後述するように、後述される1次ラック−搬送機構が使用中であるかまたは他の理由のために中で動作していないモジュールをラックが通過させられることが可能であり、および、これによってバイパスすることが可能であるように、ハウジング60は、その検体−容器ラックを検体−搬送モジュールの経路Fに沿ってどちらかの方向に搬送する働きをする冗長駆動機構を含む。
【0022】
図3と図4に最も適切に示されているように、モジュールハウジングHは、投入バッファ40と排出バッファ42のラック−支持表面として機能するプレートの互いに反対側に位置する脚P1を有するU字形のトッププレートPと、処理セクション44内でラックがその上に支持される表面Sとして機能するプレートの基部部分P2とを備える。プレートPの表面Sは、滑らかで、平らで、無特徴であり、および、検体−容器ラックがモジュールの範囲全体にわたって移動させられる時に検体−容器ラックの底面を支持するのがこの表面である。プレートPが厚さ約1.5mmの非磁性のステンレス鋼プレートであることが好ましい。投入バッファ40と排出バッファ42の各々は、それぞれに1対の互いに平行な横壁40A、42Aと横壁42A、42Bとを備える。これらの壁は表面Sから上方に延び、および、検体−容器ラックの長さLよりもわずかに大きい距離だけ互いに間隔が空けられており、これによって、その検体−容器ラックは、図4に示されているようにバッファによって受け入れられて位置決めされることが可能である。2対の上方に延びる互いに平行なガイド部材G1およびG2とG3およびG4とが、モジュール間のラックの移送中にラックが経路Eと経路Fとの上で適正に位置合せされる(すなわち、傾くことがない)ことを確実なものにするために、ラック−移送ステーション52、54において表面S上に配置されている。ガイドG1は、さらに、投入バッファ内のラックがモジュールの検体−処理セクションの中に沿層方向に移動させられる前にそれに対して位置合せされることが可能である止め具として働く。第5のガイド部材G5が、各ラックが検体−吸引ステーション50に接近する時に、その各ラックを適正に位置合せする働きをする。
【0023】
図4の平面図には、検体−搬送モジュール内の個々の検体−容器ラックRの移動が最も適切に示されている。個々のラックは、典型的には投入待ち行列41内の最後のラックの後ろに、すなわち、前部ハウジング60から最も遠いラックの後ろに、投入バッファ40内の装入ステーションにおいて手動で装入される。このラックは、図17A、17Bと図18A,18Bとを参照して後述するカム駆動プッシャ機構によって、前部ハウジング60に向かって機械的に押しやられて、ガイド部材G1と概ね係合させられる。ガイド部材G1との接触時に、ラックが、モジュールの検体−処理ステーション44を通過する沿層方向の搬送のために位置合せされる。この搬送が、表面Sの下方に位置している、図7に示されておりかつ後述される磁気X/Y駆動機構70によって生じさせられることが好ましい。駆動機構70は、最初に、混合装置46とは反対側でありかつ混合装置46から離れている位置に経路Dに沿って(すなわち、X座標に沿って)ラックを前進させる働きをする。その次に、図4に示すように、ラックは距離y(約40mm)だけY方向に移動させられて、混合装置46のラック−係合プレート47に接触させられる。その次に、ラックはX方向に短い距離x(約12mm)だけ前進させられ、これによって、(図13と図14を参照して後述される、混合プレート47によって支持されている舌片47Aと、ラックによって支持されている溝(ノッチ160B)との構成を介した)ラックとプレートとの間の確実な係合を実現する。この時点で、ラック内の検体−容器は、そのそれぞれの内容物が混合され吸引される位置にある。後述するように、複数の検体(すなわち、ラック内の容器の数に一致する)が同時にかつ反復的に混合される。特定の連続した混合のA間に、後述するように、選択された容器からの検体がプローブアセンブリPAによって吸引される。混合が、図16A−16Cに示されているように、混合プレート47とこのプレートに取り付けられているラックとを回転させることによって生じさせられ、これによって検体−容器を一時的に反転させる。すべての検体が処理のために混合され吸引され終わった後に、ラックが、混合装置からそのラックを取り外すためにX軸に沿って距離xだけ後方に移動させられ、および、経路Dに到達するまでY軸に沿って(すなわち、ハウジング60に向かって)距離yだけ前方に移動させられる。その後で、ラックはX方向に移動させられて、排出バッファ42内の排出待ち行列43の中に送り込まれることが可能であり、この排出待ち行列43では、押し装置(図20A、20Bを参照して後述する)が、モジュールからラックが手動で取り外されることが可能な取り出しステーションに向かって経路Bに沿ってラックのスタックを前進させる働きをする。あるいは、処理済みのラックが経路E、Fのどちらかに移動させられることが可能であり、この経路E、Fでは、ラックは、隣接するモジュールによってラックが受け取られて搬送され、および、隣接する機器によって処理されることができるように、2つのラック−移送ステーション52、54のどちらかによって前進させられることが可能である。または、ラックは、例えばリフレックス検査(reflex testing)のために、吸引ステーションに戻されることが可能である。
【0024】
図6を参照すると、MOD 24からMOD 22へ検体−容器ラックR′を移送するプロセス中における、2つの互いに隣接する検体搬送モジュールMOD 22、MOD24が示されている。図示されているように、ラックR′は経路Fに沿ってMOD 24のラック−移送ステーション54と、MOD 22のラック−移送ステーション52の対応する経路Fとに搬送され終わっている。後述するように、ラックR′は、モジュールの上面の下に位置するMOD 24のX/Y磁気搬送システムによって示されている「跨り(spanning)」位置に前進させられ終わっている。この搬送システムは、2つの磁気吸引部材が取り付けられているラックの基部部分内の2つの位置にラックを磁気によって結合させる働きをする。この部材は、ラックの互いに反対側の末端において間隔を空けられている。図示されている位置、すなわち、ラックが2つの互いに隣接するモジュールに跨る位置にラックを前進させるために、ラックは最初に、そのラックの最先端がモジュールの端縁と概ね一致しておりかつそのラックの側部がガイド部材G4に隣接している位置に前進させられる。その次に、この磁気搬送機構は、ガイド部材G3に向かってY方向に搬送機構を移動させることによってラックから切り離される。ラックは、ガイドG4と係合しているために、この方向では磁気搬送機構に追従できないので、ラックと搬送機構との間の磁気結合が克服され、および、ラックがモジュールの端縁に残留するだろう。この後で、磁気搬送機構は、ラックによって支持されている2つの磁気吸引部材の一方だけに、すなわち、モジュール端縁からより内側寄りの部材だけに、磁気的に結合するように再位置決めされる。その次に、搬送機構は、ラックがMOD 24の端縁から離れて隣接のモジュールMOD 22の移送ステーションに進むようにそのラックを前進させる働きをする。その次に、MOD 22の磁気駆動システムは、そのシステムがラック移送ステーション52においてラックに磁気的に結合する位置に移動させられ、および、必要に応じてラックをMOD 22の表面S上を移動させる。検体−搬送モジュール全体(および作業セル)にわたってのラックの通行パターンを制御するシステムコントローラ20によって決定される通りに、検体−搬送モジュールの相互間のラック−移送が経路Eまたは経路Fのどちらかの上で生じさせられることが可能であるということが理解されるだろう。しかし、一方の経路が1つの方向にラックを移送するために使用され、および、他方の経路が反対方向にラックを移送するために使用されることが好ましい。ラック−移送ステーションの各々におけるラックの存在を検出する1対の光電センサはその図面には示されていない。別の検体−搬送モジュールに移送されることになっているラックがラック−移送モジュールの経路Eまたは経路Fの反対側の末端のどちらかに搬送される時には、そのラックの存在が移送モジュールのラック−移送ステーションにおけるセンサによって検出される。ラックがラック受け入れモジュールのセンサによってラック−移送ステーションにおいても検出される時には、その時点において、そのラックは、ラック受け入れモジュールのX/Yラック−搬送機構による作用を受ける位置にある。システムコントローラは、ラック受け入れモジュール内でラックをさらに搬送するようにラック受け入れモジュールのX/Y搬送機構を送るために、これらのセンサの出力に対して作用する。
【0025】
図7は、図3と図4に示す搬送経路D、E,Fに沿った任意の所望の場所にラックを位置決めするように、上述の検体−搬送モジュールの表面S全体にわたって互いに垂直な方向に検体−容器ラックを移動させるための好ましいX/Y駆動機構70を示す。この駆動機構70は、検体−容器ラックが駆動のために上に支持されている非磁性プレートPの下面の真下にかつこれに隣接してモジュールハウジングH内に取り付けられるようになっている。一般的に、この駆動機構は、表面Sの下方(すなわち、プレート60の下方)にX/Y可動磁界を発生させることによって、表面S上で検体−容器ラックを前進させる働きをする。後述するように、この磁界は、X/Y可動磁気トラックアセンブリ80によって支持されている1つまたは複数の永久磁石によって生じさせられる。各磁石によって発生させられる磁界は、搬送モジュールの非磁性支持プレートPを通過して、各々の検体−搬送ラックの基部部分内に支持されている1つまたは複数の(好ましくは2つの)磁気吸引部材と磁気的に結合する。この磁石と磁気吸引部材との間の磁気結合は、X/Y平面内を磁気トラックアセンブリが移動する時に磁気的に結合されたラックが追従するのに十分なだけ強力である。
【0026】
図7には、モジュールハウジングHの互いに反対側の側壁76、78によってその支持軸のそれぞれの末端において支持されている、1対の互いに間隔を置いておりかつ実質的に互いに平行である支持軸72、74を備える、X/Y駆動機構70が示されている。軸72と軸74との間の好ましい間隔は約16cmである。図示されているように、軸72と軸74はX座標に対して平行に延び、および、X座標に対して平行なスライド移動を実現するために上述の磁気トラックアセンブリ80を共に支持する。図8Aと図8Bとに最も適切に示されているように、このトラックアセンブリ80は、3つのスリーブ軸受83A、83B、84が中に取り付けられているトラック支持ハウジング82を備える。軸受83A、83Bはこのトラック支持ハウジングの互いに反対側の側部上に位置しており、および、軸72、すなわち、いわゆる「基準(datum)」軸上をスライドするように位置合せされている。トラック支持ハウジング82が基準軸に沿った移動中は常に基準軸に対して垂直なままであることを確実なものにするために、軸受83A、83Bのそれぞれの外側寄りの端縁(outboard edge)は互いに比較的に大きく(例えば、約10cm)離れている。軸受84は、トラック支持ハウジング内に形成されている水平スロット内に支持されており、および、この軸受は、X方向のトラックハウジングの移動中に軸74(「回転止め(anti−rotation)」軸)に沿って乗って進む。スロット取り付け台は、回転止め軸が基準軸に対して完全には平行ではなくても、その回転止め軸に沿って軸受84が滑らかにスライドすることを可能にする。しかし、これと同時に、スロット取り付け台はトラック支持ハウジングが(基準軸を中心として)旋回することを防止し、これによって、基準軸に沿ったトラックアセンブリの移動中はこのハウジングが常に水平(X/Y)平面内に留まることを確実なものにする。後述するように、トラック支持ハウジング自体は、Y座標に対して平行なスライド移動のために永久磁石軸受トラック86を支持する。トラック86が、各々の検体−容器ラックの基部部分内に支持されている1対の磁気吸引部材170(図12に示されている)と磁気的に相互作用し結合する1対のU字形磁石88、90を支持することが好ましい。磁石と磁気吸引部材170との間のこの磁気的な相互作用は、検体−容器ラックが表面Sを端から端までスライドして表面Sの下の磁気トラック86の移動に追従することを生じさせるのに十分なだけ強力である。したがって、上述の構成によって、表面S上の検体−容器ラックのX/Y位置が、表面Sの下方の磁気トラック86のX/Y位置によって決定される。
【0027】
図7に示されているように、X方向における(すなわち、軸72、74に沿った)LD2ハウジングの移動は、モジュールハウジング壁76、78の間に取り付けられているベルト駆動機構100によって生じさせられる。駆動機構100は、駆動プーリ104とアイドラプーリ105との間に跨るエンドレスベルト103を備える。駆動プーリ104は、ハウジング壁76上に取り付けられているX駆動モータM4の駆動軸によって回転駆動される。モータM4は、システムコントローラ20の制御を受けて動作する双方向ステップモータである。LD2ハウジング82の一方の末端に位置したタブ91が、X駆動機構のための「基準(home)」位置と、磁気トラック86のX位置に関する基準点とを提供するために、モジュールハウジング側壁76上に取り付けられている光電センサ(図示されていない)によって検出される。
【0028】
図8Aと図8Bとを参照すると、X/Y磁気駆動機構70のLD2ハウジング82は、上述のスリーブ軸受83A,83B、94が中に取り付けられている細長い棒110を備える。棒110は、その最上の表面に沿って直線レール112を支持する。レール112は、スリーブ軸受のそれぞれの縦軸線に対して垂直な方向に延びる。したがって、スリーブ軸受がそのスリーブ軸受のそれぞれの軸の上に取り付けられている時に、レール112はY座標に対して平行に延びる。一方、レール112は、上述の永久磁石軸受トラック86をスライド可能な形で支持する。永久磁石軸受トラック86は、レール112に沿ってスライドするようになっている溝形部材116を備える。部材116は、後述するように、永久磁石88、90が上に取り付けられている非磁性プレート118に堅固に連結されている。図8Bに最も適切に示されているように、プレート118は、第2のベルト駆動機構120によってレール112に沿って選択的に駆動される。この第2のベルト駆動機構120は、エンドレスベルト121と、1対のプーリ122、123と、フレックスケーブル(図示してない)を介してシステムコントローラ20と通信してこのシステムコントローラ20によって制御される双方向ステップモータM5(Y駆動モータ)とを備える。プーリ122は、モータM5の駆動軸124によって回転駆動されており、および、アイドラプーリ123が棒部材110から延びる固定された軸126上に回転可能な形で取り付けられている。軸124、126のそれぞれの軸線がX座標に対して平行に延びる。ベルト121が、図示されている駆動プーリとアイドラプーリ123との周りに匍わせられており、および、図9に最も適切に示されているブラケット127によって磁気トラックアセンブリ94に作動的に連結されている。したがって、ステップモータM5の駆動軸が回転するにつれて、ベルト121がプーリ123とプーリ123との上を前進し、および、このベルトと磁気トラックアセンブリ94との連結によって、Y方向におけるプレート118によって支持されている永久磁石の位置が、ステップモータ駆動軸の軸方向位置によって決定されるということが理解されるだろう。プレート118の底面から垂れ下がるフラグ部材129が、Y駆動機構の「基準」位置を決定するためにハウジングHの側壁76上に取り付けられている光電センサPS(図7に示されている)によって検出され、および、したがって、磁気トラックのY位置に関する基準点を提供する。ハウジングフレーム上のXセンサとYセンサとが、磁気トラックのX基準位置が最初に検出され、その次にそのY基準位置が検出されるように、配置されている。
【0029】
さらに図9を参照すると、永久磁石88、90の各々が、フラックスブリッジ130によって互いに連結されている1対の円筒形の棒磁石128、129を備える。この棒磁石はプレート118内に形成されている円筒形の穴によって受け入れられ、および、互いに反対の磁極(北極/南極)がプレート表面の上方を延びるように配置されている。この永久磁石は、プレート118の基部の中にねじ込まれておりかつフラックスブリッジ内に形成されているクリアランスホールを貫通して下方に延びる肩つきねじ134を取り囲むばね132によって上方に偏倚させられている。このコイルばねの一方の末端はボルト頭134Aによって支持されており、および、このばねの反対側の末端はフラックスブリッジに係合し、これによってフラックスブリッジを圧迫してプレート118の下面に接触させる。棒磁石の各々が約9.5mmの直径を有し、かつ、磁石が中心間で約19mmの間隔を空けられていることが好ましい。各磁石の長さは、フラックスブリッジがそのプレート118の下面に接触する時にプレート118の上方に約3mm突き出すような長さである。各磁石がネオジム添加鉄を含むことが好ましい。フラックスブリッジは鉄で造られており、かつ、約3mmの厚さである。X/Y駆動システム70が、約1mmの間隔が棒磁石の頂部とラック支持プレートPの底部との間に設けられていることが好ましい。
【0030】
次に図10を参照すると、上述の磁気検体−搬送装置と共に使用するようになっている好ましい検体−容器ラックRが、同様の複数の検体容器Cを受け入れるための複数(この場合には5つ)の区画152を画定するハウジング150を備えるものとして示されている。
【0031】
図示されている実施形態では、ハウジング150はプラスチックで作られており、および、2つの互いに噛み合うセクション、すなわち、容器区画152を画定する上部セクション154と、ラックによって受け入れられる検体容器を支持する基部セクション155とを備え、および、さらには、上述の磁気吸引部材170を収容する働きをする。この2つのセクションは互いに1つに嵌合させられ、および、基部セクションの互いに反対側の末端に設けられている1対の可とう性アーム156によって所定位置に保持される。図11Aと図11Bでは、ラックの上部セクションが、前方壁158と後方壁159との互いに反対側に位置した末端に配置されている1対の互いに平行な端壁157を備えるものとして示されている。複数の等間隔の横断壁160が前方壁と後方壁との間を延びる。この横断壁は容器区画152の各々を区分する働きをする。各区画の最上部には、容器心出しアセンブリ162が設けられている。容器心出しアセンブリ162は、区画内の異なる直径の検体容器に着脱自在に係合しかつその検体容器を心出しする働きをし、これによって受け入れられた容器の中央縦軸線が等間隔に位置させられ、および、共通平面内に互いに平行に配置される。したがって、この検体−容器ラックが検体−搬送モジュール内の検体−吸引位置において位置合わせされる時に、吸引プローブアセンブリは、垂直平面内を横方向へ(X座標に沿って)移動することによって、検体容器の各々の中心に反復的かつ確実に接近することが可能である。心出しアセンブリ162の詳細が、本明細書に引例として組み入れられている共通して譲渡された米国特許第5,687,849号に説明されている。容器心出しアセンブリと容器との間の係合力は、容器が繰り返し反転させられる時に、検体−混合動作中に容器が回転することまたは軸方向に移動することを防止するのに十分な大きさである。
【0032】
図11Bに示されているように、壁157、160の後部垂直端縁には、混合装置46の取り付けプレート47から突き出す水平方向に延びる舌片部材47Aを収容する構造が設けられている。この構造は、一連の互いに間隔を置いたノッチ157A、160A、160Bの形態をとる。ノッチ157A、160Aは長方形の形状でありかつ舌片部材47Aのための隙間を提供するが、上述の磁気搬送システムによってラックが混合プレート47の表面に沿って水平方向にスライドさせられるので、ノッチ160Bは、(台形の横断面を有する)舌片部材47Aの互いに反対側に位置した端縁を係合する形で受け入れるようになっている台形の形状を有する。この台形のノッチが、第1および第2の区画152と第4および第5の区画152とを区分する壁160の端縁の中に形成されていることが好ましい。長方形ノッチ157A、160Aの寸法は、舌片部材47Aが壁47に沿って障害なしにスライドしてノッチ160Bに係合することを可能にするような寸法である。2つのノッチ160Bと舌片47Aとの間の係合を完了させる時に、検体−容器ラックは、そのラック内の収容検体が混合させられることを生じさせる混合装置46によって反転させられるための、かつ、関連した臨床機器の吸引プローブアセンブリPAをそのラックによって支持される検体容器のどれか1つに接近させるための位置にある。
【0033】
図12に最も適切に示されているように、ラックハウジング150の基部セクション155は、1対のU字形の磁気吸引部材170を受け取って支持するように構成されている。部材170の各々が磁気吸引性のステンレス鋼440Cを備えることが好ましい。各々の部材170は、架橋部分170Bによって一方の末端で互いに連結されている一対の互いに間隔が開いた脚部分170Aを備える。部材170は、そのそれぞれの脚部分170Aの遠位末端171がラックの底面155Aに向かって下方に延びるように、ラックの基部部分内に支持されている。図11Bに示されているように、ラックの底面は、ラックの4つの隅において約0.5mmだけ下方に突き出す4つの長方形パッド172を画定する。これらのパッドは、ラックと搬送表面Sとの間の物理的接触だけを実現する。部材170の遠位末端171が、ラックの底面において、すなわち、パッド172の底面によって画定されている平面から約0.5mm手前で終端することが好ましい。遠位末端171の間の間隔は、磁気トラック80によって支持されている永久磁石88、90の磁極端の間の間隔に一致する。この間隔が9.5mmであることが好ましい。したがって、検体−容器ラックが表面S上でそのパッド172上に静止しており、かつ、部材170の遠位末端が磁石88、90の磁極端に並置されている時には、磁気回路が完成されており、および、一方の磁極端から発する磁束が部材170を貫通して反対側の磁極端の中に入る。磁極片の強さが、表面Sの下方を磁気駆動装置が移動する時にラックに対して動きを生じさせるのに十分なだけの磁気結合をラックと駆動機構との間で実現するように選択されている。互いに反対側に位置するU字形の構造、すなわち、永久磁石96、98のための一方のU字形構造と、磁気吸引部材170のための他方のU字形構造とを備えることが、「横方向の力」対「垂直方向の力」の比率を最大化することによって横方向の切り離し力に対して強力に抵抗する磁気結合を生じさせる。
【0034】
ラックRの基部セクション155のさらに別の特徴が図11Aと図11Bとに示されている。基部セクション155は、さらに、ラックの互いに反対側の端部に位置している1対のカップ形のポケット165A、165bを画定する。このポケットの各々は、(図22を参照して後述する)冗長ラック駆動機構を備える可動「足(foot)」部材を受け入れるようになっている。上述したように、この駆動機構は検体−搬送モジュールのハウジング60内に収容されている。この駆動機構は、表面Sの下方に位置する磁気駆動機構が使用されていないか、または、そうではなくて、その磁気駆動機構が使用中である場合に、経路Fに沿ってラックを前進させることによって特定の検体−搬送モジュールをバイパスすることが望まれる時に、経路F(図4)に沿ってラックを前進させるために使用される。この冗長駆動機構の足部材は、ラック−移送ステーション52またはラック−移送ステーション54のどちらか一方に位置しているラックのポケット165A,165Bのどちらかの中に入る時に、基部部分155の端壁155A上に横方向の力を及ぼし、これによって、経路Fに沿ってラックを沿層方向に引っ張ることによってラックを前進させる。
【0035】
図13と図14には、検体の混合のために混合装置46を各ラックに堅固に係合させる好ましい舌片−溝機構(tongue−and−groove mechanism)がさらに明瞭に示されている。上述したように、混合装置46は、混合の前にX/Y駆動機構によって個々のラックがそれに対して配置される、回転自在に取り付けられているプレート47を備える。混合の前に、プレート47は垂直平面内にあり、したがって、ラックを受け入れてそのラックに連結されるように位置決めされている。図13に示すように、プレート47は、より幾分か狭い中心領域182によって区分されている1対のラック係合領域180を有する、水平方向に延びる舌片部材47Aを支持する。領域180の横断方向の横断面は台形の形状であり、および、ラックとプレート47の表面との間の相対的なスライド移動の最中に、ラック壁160内に形成されている2つのノッチ160Bと嵌合するようになっているサイズである。当然のことながら、この移動は、上述の駆動機構70によって実現される。部材47Aの一方の遠位末端に形成されている止め表面184が、第1および第2の容器区画を区分する横断壁160に係合することによって、壁47に沿ったラックの滑動を阻止する働きをする。この時点で、領域180はノッチ160Bと係合しており、および、プレート47上に支持されている永久磁石186が、ラック基部155によって支持されている磁気吸引部材170の1つを磁気的に吸引する。ノッチ160Bの中へ舌片がさらに移動することを阻止する働きをする横断壁に対して止め表面184が係合状態になるようにその止め表面を動かす横方向の力成分をこの磁石が及ぼすように、この磁石の位置は部材170から(直接的に反対側にではなく)わずかにオフセットしている。磁石186と磁気吸引部材170との間の磁気吸引が、後続の混合動作中にラックが舌片領域180上を横方向に移動することを防止するのに十分なだけ強力である。しかし、磁石186と部材170との間の磁気的な相互作用は、混合機構からラックを引き離す時が来る時に、X/Y可動磁気トラックによってラック上に及ぼされる磁力によってその磁気的な相互作用が容易に克服されることが可能であるように十分に弱い。表面Sによって支持されている光電センサ188Aが、プレート47内に形成されている窓188Bを通してラックを検出し、および、ラックが混合のためにそのプレート上に位置していることと、そのプレート47が垂直に方向配置されていることとを示す信号をシステムコントローラに送る。
【0036】
図15Aでは、ラックが、混合の前に混合プレート47に作動的に連結されている形で示されている。プレート47は、システムコントローラ20の制御を受けて動作する双方向ステップモータM6の駆動軸191上で回転するように支持されているヨークアセンブリ190によって支持されている。プレート47が駆動軸軸線を中心として移動する時のそのプレートの角位置が、1対の光電センサPS1、PS2によって検出される。これらの光電センサは、駆動軸191と共にヨーク190が回転する時に、ヨーク190に堅固に取り付けられている半円形の円板192の周縁の周りの選択された位置に位置させられる。各々の光電センサは、互いに反対側に位置しておりかつ互いに間隔を置いているアーム195A、195Bの間に光放出器と光センサとを支持するヨーク形のハウジング195を備える。光電センサのそれぞれのヨークアームが、円板192の周縁内に形成されているノッチ192Aの通過を検出する位置において、円板192の互いに反対側の側面上に配置されている。光電センサは、円板の周縁の周りで互いに角度的に45度の間隔を開けられており、および、図15Aと図16Aとに示されているようにラックが垂直位置にある時に両方のセンサがそのそれぞれの光放出器からの光を検出する(両方のセンサが「ON」である条件)ように配置されている。PS1はその円板によって妨害されていない放出光を検出し、および、PS2は、その放出光がノッチ192Aを通過する時にその放出光を検出する。図15Bと図16Bとに示されているように、モータ軸191が45度の「キャップアップ(cap−up)」位置に回転させられ終わっている時は、PS1はノッチ102Aを通過する光を検出し、かつ、PS2は、円板によって光が遮断されているので光を検出しない。したがって、PS1はONであると同時に、PS2はOFFである。図16Aと図16Bとで見た場合に、駆動軸が反時計回りに回転し続けるので、両方の光電センサが、円板192の後縁がセンサPS2を通過するまでOFF状態にあり、この時点ではPS1がOFFであると同時にPS2がONである。この時点では、容器Cが45度の「キャップダウン(cap−down)」位置に反転させられている。このキャップダウン位置では、容器内の気泡がその容器の底部に移動させられ終わっており、これによってその容器内の液体検体を実質的に混合する。キャップダウン位置に到達し終わると、ステップモータが逆転し、および、容器がその45度のキャップアップ位置に戻され、これによって容器とその内容物とを再反転させる。このサイクルが数回繰り返される。検体がラック内の最初の容器から吸引される前に、検体ラックがそのキャップアップ位置とキャップダウン位置との間を8回転させられることが好ましい。この検体が処理されている最中は、ラックがさらに2回反転させられ、および、この処理が、ラック内の最後の検体が吸引され終わるまで続けられる。したがって、5つの容器を有するラック内の吸引されるべき最後の検体は、吸引の前に16回反転させられるだろう。
【0037】
上述の説明は、検体容器ラックが通常において本発明の検体搬送モジュールの処理セクション44を通過する形で搬送されおよびこのセクションによって処理される仕方に関する説明を完結する。後述の説明が、処理セクションの搬送機構によってラックが作用されることが可能である位置に投入バッファ40内の未処理の検体−容器ラックを前進させるための、および、排出バッファ42内の処理済みの検体−容器ラックを取り外し位置に搬送するための、好ましい機構に関する。特定の検体−搬送モジュールをバイパスするように経路Fに沿ってラックを前進させるための、ハウジング60によって収容されている冗長駆動機構を、さらに後述する。
【0038】
さて、図17Aと図17Bとを参照すると、これらの図面はそれぞれに図3の装置の投入バッファ40の後部部分と前部部分との特定の好ましい詳細を示す。ラックが、そのラックがその上を検体搬送モジュールの処理セクション44を通過して搬送される同一の表面S上でバッファ内に支持されている。バッファ側壁40Aが検体−容器ラックの長さLよりもわずかに大きい距離だけ互いに間隔を開けられており、および、ラックは、そのバッファ側壁上に可動的に取り付けられている1対のカム駆動プッシャ200によってそのバッファの前部に向かって押されて、ガイド部材G1と接触させられる。これらのプッシャは、1対の互いに反対側に位置する駆動軸204A、204Bを回転させる働きをする双方向ステップモータM7によってバッファ側壁の各々の中に形成されている走路(track)202内を前方と後方に同期した形で選択的に移動させられる。駆動軸240Bは、その2つのプッシャの同期された移動を調整するための手段としても機能する継ぎ手206によって延長される。駆動軸のそれぞれの自由端部の各々が駆動スプロケット206を支持する。後者は、バッファ側壁の外側に位置しており、および、駆動スプロケットとアイドラスプロケット210との間に支持されているケーブル208(実際には、いわゆる「ケーブルチェーン(cable chain)」)を前進させる働きをする。アイドラスプロケットは、バッファの前部に向かったバッファ側壁の外側上に位置している軸212上に回転するように取り付けられている。各々のケーブルの互いに反対側の端部は、図18Aと図18Bとに最も適切に示されている1対のクランプ214によってカム駆動プッシャ200に連結されている。駆動モータが、バッファの前部に向かってプッシャ200を引っ張る作用をする方向にケーブルを前進させる働きをする時には、ラック−押し指片218がプッシャハウジング220から外方に突き出て、その表面218Aがバッファ内に位置したラックの後側に接触する位置へとバッファ側壁から内方に延びる。図18Aに示されているように伸長された指片218を有するプッシャの連続移動が、ラックと、投入待ち行列内のそのラックの前方のあらゆるラックとを、ガイド部材G1に向かって移動させる働きをする。図17B内に示されている位置にラックが達すると、バッファ側壁上に取り付けられている光電センサPS4がこの場所におけるラックの存在を検出し、および、プッシャのさらなる動きを停止させるためにシステムコントローラ20に信号を伝送する。追加のラックが投入バッファによって受け取られる時に、モータM7が逆方向に動作し、これによってバッファの後部に向かってプッシャを引っ張る。ケーブル208が逆方向にプッシャ機構を引っ張る時に、指片218が、図18Bに示されている位置へとプッシャハウジング200内に引っ込む。
【0039】
図18Aと図18Bとを参照すると、プッシャ指片218が、軸線A′を中心として回転するようになっているカム部材222(図19Aと図19Bに示されている)の一体的部分であることが理解されるだろう。ケーブルクランプ214が、カム部材を回転させることが可能である駆動ピン226を受け入れるスロット224Aを有するハウジング224に堅固に連結されている。ケーブル208がプッシャを前方方向に引っ張るので、ハウジング224は駆動ピンに対して力を及ぼして、図19Aで見た場合に軸線A′を中心として時計回りにカム部材が回転することを引き起こす。プッシャ指片218が完全に伸長している図19Aに示されている位置にカムが回転すると、カム表面222Aがハウジング200内の強制止め具(positive stop)228に係合する。その次に、ケーブルによって加えられる連続した力が、直線走路202に沿ったプッシャ機構全体の移動を生じさせる。ハウジング224内のスロット224Aが、カム部材の回転中にそれがする必要があるので、駆動ピンが横向きに移動することを可能にする。駆動モータが逆転し、これによって反対側のケーブル末端がカム部材の(図19で見た場合の)反時計回りの回転を生じさせることを引き起こす時に、カムは、図19Bに示されている指片引っ込み位置に回転する。カムがこの位置に回転する時に、プッシャ指片表面がハウジング200内の第2の強制止め具230に接触する。駆動アーム226に対してケーブルによって加えられる力を続けることが、走路202に沿って反対方向に向かう、すなわち、投入バッファの後部に向かう、プッシャ機構全体の移動を結果的に生じさせる。システムコントローラは、投入バッファの後部壁40B上に取り付けられている光電センサPS5によって投入バッファ内の取り枠の数を追跡する。(図17Aを参照されたい。)このセンサは光伝送器240と光検出器242とを備え、光検出器242は、投入待ち行列内の最後のラックの後部表面による反射時に伝送光を検出する働きをする。光電センサからの最後のラックの距離としたがってバッファ内のラックの数とを計算するために、標準的な三角測量方法が使用される。動作時には、ラックが投入バッファ内のどこかに位置している時には常に、センサPS5が、測定されたその間の距離と先行の距離とが変化していることを検出するだろう。その次に、モータM7が、プッシャ指片を引っ込ませ、および、受け取られた最後のラックの背後の位置にそのプッシャを移動させる働きをするだろう。その次に、このモータは反対方向に回転し、プッシャ指片が伸長させられて最後のラックの後部と係合するようにプッシャ指片を駆動することを引き起こすだろう。その次に、プッシャは、投入待ち行列内の最初のラックが光電センサPS4に達し終わるまで、または、プッシャが走路202の末端に達するまで、前方に移動するだろう。プッシャの前方移動が、プッシャが3つのラックのスタックを、センサPS4によって最初のラックが検出される位置に押し動かす位置に制限されるだろう。X/Yトラックは、例えばテストラン(test run)の最後の3つのラックを取り出すために、3つのラックの幅Wの距離だけ投入バッファの中に(Y方向に)移動することが可能である。
【0040】
次に図20Aと図20Bを参照すると、好ましい排出バッファ42が、その排出バッファの中に処理済みの検体−容器ラックを放出するための別のタイプのラック−押し機構250を備えるものとして示されている。特定のラックの検体を吸引して処理する時に、上述のX/Y磁気駆動機構は、排出バッファの正反対側の位置に経路Dに沿ってX方向に沿層方向にラックを前進させる働きをする。その次に、X/Y駆動装置は、ラックの幅Wよりもわずかに大きい距離W′(約30mm)だけY方向に後方に磁気トラック86を移動させる働きをする。そうすることにおいて、そのトラックの最後尾の端縁86A(図8Aに示されている)が、図21に最も適切に示されている受板255に物理的に係合する。(図20Aと図20Bでは、支持プレートPは示されておらず、そのプレートの上方と下方の排出バッファの特徴だけが示されている。)受板255はラック支持プレートPの下方にかつ磁気トラックの移動経路内に配置されている。受板255は、上方に延びるタブ255Cによって、表面Sの上方に位置しているL字形のプッシャ部材257の1つの脚257Aに堅固に連結されている。脚257Aは、バッファ壁42Aの底部端縁に沿ってスライド移動するように取り付けられている。したがって、脚257AはY方向に延びる。プッシャ部材の他方の脚257Bが、脚257Aに対して垂直方向、すなわち、X方向に延びる。受板は、図20Aに示されているホームポジション(home position)に向かってコイルばね259によってばね偏倚させられている。この位置では、脚部材257Bは、図3に示されているガイド部材G3の直ぐ下方に位置する。
【0041】
排出バッファ内にラックが無い場合には、磁気トラックは、トラック86とラックとの間の磁気吸引だけによってそのバッファの中にラックを前進させる働きをする。しかし、トラック86がY方向に後方に移動するので、その最後尾の端縁が受板の直線端縁部分255Aに物理的に係合し、これによって、ばね259によって実現されるばね力に逆らって受板を後方に移動させる。受板が距離W′だけ後方に移動した後に、脚257Aの自由端部が、壁42Aの下部部分内に形成されているノッチ260の端縁260Aに概ね到達する。この箇所に到達し終わった後に、システムコントローラは、トラックが排出バッファから遠ざかって投入バッファに向かってX方向に移動するようにトラックを制御する。そうする際に、ラックがバッファ側壁42Bと接触することによってそのラックがトラックに追従することが防止されるので、トラックとラックとの間の磁気吸引が克服される。トラックが排出バッファから遠ざかってX方向に移動し続けるので、図8Bに示されている磁気トラックの後部の隅86Bが、受板の対角線端縁255Bに係合し始めるだろう。トラックがさらにX方向にその移動を継続するので、トラックの隅86Bが受板の対角線表面に沿って移動するのにつれて、受板は次第にそのホームポジションに戻る。
【0042】
次に、新たに処理されたラックの排出の用意が整っている時に、1つまたは複数の処理済みのラックがすでに排出バッファ内にある場合には、上述のプロセスと同じプロセスが繰り返される。しかし、ラックのスタックを排出バッファの中に後方に移動させるための駆動力が、プッシャ部材257の脚257Bによって加えられる力である。トラック86と単一のラックとの間の磁気吸引が、表面S上のラックのスタックを押すのに十分なだけ強力ではないということに留意されたい。したがって、上述の構成では、磁気トラック86が受板とその関連のプッシャ部材とに物理的に係合して距離W′だけ後方移動するので、排出待ち行列中の複数のラックが、おおよそ1つのラックの幅の分だけ後方に割り出しされる。バッファ壁42A上に取り付けられている1対のセンサPS6、PS7が、排出バッファがラックを受け取り終わった時点と、排出バッファが満杯である時点とを、それぞれに検出する。
【0043】
図6を参照して上述した仕方で幾つかの異なる臨床機器がそのそれぞれの検体−搬送モジュールの相互間で検体−容器ラックを搬送している作業セル環境内では、1つの機器から別の機器に検体−容器ラックを搬送するために特定の機器のX/Y駆動機構70をバイパスすることを望ましいものかまたは必須なものにする状況が生じる。例えば、中間の機器のX/Y駆動機構が機能していない3つの機器を備える作業セルでは、処理が特定のサンプルの処理を必要とする場合に、連続動作の能力を作業セルを提供することが望ましい。したがって、本発明の別の側面によって、図22と図23とに示されている冗長駆動機構280が、検体−搬送モジュールのX/Y搬送機構とは無関係に、そのラック−移送ステーションの1つから別のラック−移送ステーションへ、その検体−搬送モジュールを通して検体−容器ラックを前進させるために、各々の検体−搬送モジュール内に設けられている。この冗長駆動機構は各モジュールの前部ハウジング60の中に収容されており、および、ラック−移送ステーション52、54の間を延びる。
【0044】
図22を参照すると、駆動機構280は非円形(例えば星形)の横断面のスプライン軸281を備える。このスプライン軸は、モジュール側壁76、78に堅固に連結されている1対の互いに平行な支持プレート282、283の間を延びる。プレート282、283は、スプライン軸の縦軸線を中心として回転するようにスプライン軸を回転自在に支持する働きをする軸受を含む。軸281の回転位置が、壁282上に取り付けられている直線アクチュエータ285によって制御される。アクチュエータ285は、図23に示されている伸長位置と、直線アクチュエータハウジングにより近い非伸長位置との間を軸方向に移動する直線アクチュエータ部材285Aを備える。機械的連結機構287がそのアクチュエータをスプライン軸281に連結する。したがって、直線アクチュエータがその伸長位置と非伸長位置との間を約12mm移動する時に、スプライン軸が約30度の角度範囲にわたって回転する。スプライン軸は、ラック−係合足部材290Aを有するプレート290をスライド自在に支持する。プレート290は、スプライン軸を受け取ってこのスプライン軸にスライド自在に係合するように形作られている中央穴(図示していない)を備えている。プレート290はスプライン軸のトラック(truck)291とナット291Aとの間に締め付け固定されており、このスプライン軸のトラックとナットは、両方ともスプライン軸によってスライド自在に支持されておりかつスプライン軸と共に回転するようになっている。したがって、スプライン軸が直線アクチュエータの引っ込み移動によって回転させられる時に、プレート290はスプライン軸と共に回転し、および、そうする時に、足部分290Aがモジュールの後部に向かってY方向に移動するだろう。検体容器ラックRが図23に示されているように位置している場合には足。プレート290の部材290Aがラック−ポケット165A、165Bのどちらか一方の中に入るだろう。足290Aの幅がラック−ポケットの幅よりも著しく小さいので、その足をそのポケットの中に入れることは実際には比較的容易な作業である。ラック−ポケットの中に入る時には、足部分は、ポケットの側壁に駆動的に係合し、かつ、これによって検体−搬送モジュールの経路Fに沿ってラックを前進させる準備が整っている。直線アクチュエータ部材がその伸長位置に移動する時には、スプライン軸が反対方向(反時計回り方向)に回転し、これによって、足部材290Aがラック−ポケットの外に出て、スプライン軸トラックがスプライン軸に沿って障害なしに移動することを可能にする位置にその足部材290Aが移動することを引き起こす。
【0045】
経路Fに沿ってラックを前進させるために、プレート290は、ベルト駆動システム295によってスプライン軸に沿ってスライド駆動される。このベルト駆動システムは、モジュール側壁76上に取り付けられている双方向ステップモータM8を備える。モータM8はシステムコントローラ20によって制御され、および、駆動プーリ298とアイドラプーリ299との周りに匍わせられているエンドレスベルト297を選択的に前進させる働きをする。この駆動プーリはステップモータの駆動軸上に取り付けられており、および、アイドラプーリ299は、軸支持プレート283上に取り付けられているベルトテンショナハウジング300の基部によって支持されている固定された軸の上に回転するように取り付けられている。図示しているように、ベルト297は、そのモジュールの経路Fに対して平行なX方向に延びる。プレート290は連結機構296を経由して駆動ベルトに機械的に連結されている。
【0046】
動作時には、冗長駆動機構280は、図23に示されている位置、すなわち、図6に示されている経路Fに沿って、互いに隣接する検体−搬送モジュールの互いに反対側に位置する移送ステーション(例えば、図6のステーション52、54)にラックRが跨る位置から、検体−搬送モジュールの反対側の同様の「跨り(spanning)」位置に、ラックを機械的に前進させることによって、モジュールをバイパスするために使用されることが可能である。この第2の位置に到達し終わると、そのように搬送されたラックは、隣接するモジュールのX/Y駆動機構または冗長駆動機構による作用を受けるだろう。経路Fに沿ってラックを前進させる時に、プレート290の足部分290Aは、上述した仕方で一方のラックポケット(より内側のポケット)の中に入る。ベルト297がX方向に駆動される時に、プレート290はスプライン軸281に沿ってスライド自在に駆動され、および、足部分290Aの横表面がラックポケットの端壁上に駆動力を及ぼして、表面Sに沿ってラックが引っ張られかつ経路Fに沿って移動することを引き起こすだろう。プレート290がそのモジュールの反対側のその移動の終端に達すると、検体−容器ラックは、ラックの前縁だけがそのモジュールの端縁に到達し終わっているように位置させられるだろう。この時点において、スプライン軸は、ラックとの係合から足部材290Aを取り外すように反対方向に回転させられるだろう。ベルト駆動装置295は、逆の方向に、ラックの後縁の背後にプレート290を位置させる働きをするだろう。その次に、スプライン軸は、足部材を再び完全に伸長させるために再び反対方向に回転し、および、ベルト駆動装置は、スプライン軸に沿って前方にプレートを駆動するために逆転させられるだろう。そうする時に、伸長された足部分はラックの後部端縁に駆動的に係合し、および、これによって、この時点ではモジュールの反対側において、図6と図23とに示されているモジュール−跨り位置にラックが前進し終わるまでそのラックを押す働きをするだろう。その次に、ラックは、隣接するモジュールによって上述の仕方でさらに前進させられるべき位置にある。前述した仕方で多機器作業セルのモジュールをバイパスすることが可能であることが、機器の搬送モジュールの1つがそのラック−搬送システムのどちらか一方の故障を被る時にさえ、作業セルの機器が連結された状態のままであることを可能にする。このラック駆動装置の冗長性が作業セルの全体的な可用性を増大させ、および、オペレータの介入のレベルを減少させる。
【0047】
本発明を特定の好ましい実施形態を参照して説明してきた。明らかであるが、本発明の着想から逸脱することなしに変型例が生じさせられることが可能であり、および、添付されている特許請求項の範囲内にこうした変型例が含まれることが意図されている。
【技術分野】
【0001】
本発明は、自動化された多機器臨床作業セル(multi−instrument clinical workcell)内での検体−容器の搬送のための装置における改良に関する。さらに特に、本発明は、個別の機器の検体−吸引プローブに検体−容器を提供することと、かつ、作業セル内の互いに隣接する機器の互いに同一の検体−搬送モジュールの間を検体−容器を搬送することとの両方の働きをする、臨床作業セルの様々な異なる検体−処理機器の各々と共に使用するようになっているモジュール型の検体−搬送システムに関する。
【背景技術】
【0002】
様々な自動化された臨床機器を使用して、例えば全血、血清、尿、脊髄液等のような様々な液体の生物検体に対して診断検査を行うことが当業で公知である。全血検体の分析においては、例えば、この自動化された機器は、(i)異なる血液細胞タイプのそれぞれの物理的特性、電気的特性、および/または、光散乱特性に基づいて、その異なる血液細胞タイプを計数および/または識別する働きをする血液学機器と、(ii)光学フローセルを通過する個々の細胞に照射することと、分析の前に対象の細胞が共役または染色させられている特定の蛍光色素の蛍光発光を検出することとによって異なる細胞タイプを識別する働きをする蛍光流動細胞測光機器とを含むだろう。血液−分析作業セルで使用できる他の自動化された機器が、後続の顕微鏡分析のために選択された検体の光学スライドガラスを自動的に調製する働きをする検体スライドメーカである。これらの機器のすべては、共通して、処理のために検体を吸引する目的で検体−容器の中に垂直に移動するようになっている、可動的に取り付けられている吸引プローブを有する。これらの異なる機器は、互いに独立して動作することが可能であるが、共通の(典型的にはマイクロプロセッサ制御の)システムコントローラが得られるべき特定の結果に基づいて特定の検体に対する個々の機器の動作を制御する働きをする多機器「作業セル」を集合的に形成するように一体化され、すなわち、互いに連結されることが可能である。
【0003】
臨床機器によって分析されるべき生物検体は、一般的に、様々なタイプの密封された試験管または容器の中に収集され、これらの各々は、通常は、各機器の上述の吸引プローブが処理のための所望の一定分量の検体をそのゴムキャップを貫通して出し入れすることが可能な穿孔可能なキャップを有する。典型的には、バーコードの形態の符号化された患者情報および試験情報を各々が備えている5つまたは6つの検体容器が、単一のラックすなわち取り枠によって吸引のために支持される。作業セル環境内では、検体−容器ラックは、コンベヤシステムによって臨床機器の間を搬送される場合が多い。コンベアシステムは、臨床機器から間隔を置いている検体−装入ステーションにおいて検体のラックを受け取って、作業セルのシステムコントローラによって決定される通りに、行われるべき検査または処理に応じて、異なる臨床機器に対してラックを出し入れする形で選択的に搬送する働きをする。あるいは、ラック、または、ラック内の個々の容器が、ロボットアームによって異なる臨床機器に対して搬送され、または、異なる臨床機器から搬送されてもよい。どちらの場合とも、機器間の搬送が故障する場合には、作業セル全体が動作を停止するということが理解されるだろう。
【0004】
最も多くの場合に、臨床機器が、その臨床機器内で検体−容器を受け取って前進させるためのその臨床機器自体の一体的な検体−搬送システムを有する。これらの標本−搬送システムは、機器毎にその機械的構造が大きく異なっている。この結果として、こうした標本−搬送システムは、作業セル構成の中へ一体化される場合に問題をもたらす可能性がある。
【0005】
米国特許第6,444,472号と同第5,720,377号は、検体が吸引されるかまたは他の形で処理されることが可能な場所に検体−容器ラックを提供するために、様々な臨床機器と共に使用されるようになっている2つの異なるモジュール型搬送システムを開示している。これらのラック−搬送システムの各々は、処理されるべき検体−容器ラックを受け取って位置合せするための投入待ち行列と、処理(例えば、収容検体の吸引)のために容器を提供するように、ラックが投入待ち行列内で位置合せされる方向に対して垂直な方向においてラックがその前後送りセクションに移動させられる前後送りセクションと、収容検体が処理され終わっている容器ラックを受け取るための排出待ち行列とを備えるスタンドアロン型のユニットである。’472特許では、ラック搬送モジュールが、前後送りセクション内に位置した検体ラックから1回に1つずつ各々の個々の検体−容器を取り除く働きをし、かつ、処理のために1つまたは複数の臨床機器に個々の容器を搬送する働きをするロボットアームと組み合わせて使用される。検体の処理の後に、ロボットアームは、処理機器において各々の検体−容器に再係合し、および、後で排出待ち行列に前進させられるラック内の空の容器−開口にその検体−容器を戻すようにプログラムされている。精密で複雑な「移動ビーム」機構が、その支持表面の上方に容器ラックの各々を物理的に持ち上げて、投入待ち行列と排出待ち行列と前後送りセクションとの中で増分距離だけラックを前進させるために使用される。したがって、’472特許の検体−容器搬送モジュールは、投入待ち行列から、検体−容器が処理のためにロボットアームによって接近されることが可能な場所へと、単純に検体−容器ラックを前進させる働きをするだけである。このモジュール自体は、処理のために機器に検体−容器を提供する働きもしないし、検体−容器を他のモジュールに搬送するために他のモジュールとインタフェースする働きもしない。
【0006】
上述の’377特許では、標本−搬送モジュールが、投入待ち行列から、選択された容器から検体が吸引されることができる場所に検体−容器ラックを搬送する働きをする。その次に、容器のラックが、取り出しを待機するために出口待ち行列に放出される。磁気搬送システムが、ラックが手動で装入される投入位置から、各々のラックが検体吸引ステーションに機械的に移動させられることが可能な場所へ、投入待ち行列内の直線経路に沿って検体−容器ラックを前進させるために使用される。投入待ち行列から外に出て検体−吸引位置の中に入るラックの移動は、一連の外方に延びるパドル(paddle)を有するコンベアベルトによって引き起こされる。ベルトが前進するのにつれて、個々のパドルが容器の側部に係合し、これによって1度に1つずつの容器の形でラックの移動を割り出しする。検体の吸引と検査の後に、検体−容器ラックが、ラックの端縁に係合してそのラックを排出待ち行列の中に押し込む働きをするプッシャ機構によって検体−処理セクションの外に機械的に押し出される。そこでは、割り出し機構がラックを取り出し位置に前進させる。’377特許の検体−搬送モジュールは、例えば多機器作業セルで使用される臨床機器のような異なる臨床機器に検体−容器を提供するために有用であり得るが、完全に自動化された作業セルの臨床機器を連結させるために必要であるように、どのように1つのモジュールから別のモジュールに検体−容器ラックが搬送されることが可能であるかということに関しては、この特許は言及していない。恐らくは、この機能を実現するためにロボットアームまたは他の何らかの独立したコンベヤシステムが使用されるだろう。当然のことであるが、こうしたアプローチは、作業セルに多大なコストと複雑性とを加えるだろう。
【発明の概要】
【発明が解決しようとする課題】
【0007】
上述の考察を考慮して、本発明の目的が、モジュール型の検体−搬送装置が直接的に関連付けられている個別の臨床機器の検体提供要件(specimen presentation need)を満たすことが可能であるだけでなく、検査および/または処理のための作業セルの個別の機器の相互間で検体が搬送されなければならない多機器作業セルの検体搬送要件(specimen transport need)を満たすことも可能であるモジュール型の検体−搬送装置を提供することである。
【0008】
本発明の別の目的が、多機器臨床作業セルの互いに隣接する機器の間で検体−容器を搬送するためのロボットアームと他の独立した検体−搬送との必要を排除する、検体−搬送モジュールを提供することである。
【課題を解決するための手段】
【0009】
本発明の第1の側面によって、多機器臨床作業セルの複数の検体−処理機器の各々と共に使用するようになっている検体−搬送モジュールが提供される。このモジュールは、(i)複数の検体−容器ラックを受け取って支持するための投入バッファと、(ii)関連した検体−処理機器の吸引プローブによって接近されるべき位置に検体−容器ラックを支持するための検体−吸引ステーションと、(iii)このモジュールからラックが取り除かれるべき位置で複数のラックを支持するための排出バッファと、(iv)別の検体−処理機器に関連付けられている隣接した同一の検体−搬送モジュールの対応するラック−移送ステーションに搬送されるべき場所において個別の検体−容器ラックを支持するためのラック−移送ステーションとを画定するハウジングを備える。本発明の検体−搬送モジュールは、さらに、モジュールハウジングの上述のバッファとステーションとの間で個々の検体−容器ラックを搬送するための検体−搬送システムを含む。特に好ましい実施態様では、検体−搬送システムは、モジュールハウジング内で互いに垂直な方向にラックを選択的に搬送するために磁力によってラックと相互作用するX/Y磁気搬送システムを備える。モジュールハウジングが、さらに、モジュールに直接的に関連付けられている機器による検体−吸引の前に、検体ラックが処理される(例えば、検体を均一に混合するために繰り返し反転される)ことが可能な検体−処理ステーションを画定することも好ましい。
【0010】
本発明の第2の側面によって、モジュール型の多機器臨床作業セルが提供される。この作業セルは、(i)その臨床機器の各々に関連付けられている吸引プローブに提供される液体の生物検体を処理するようになっている少なくとも2つの臨床機器と、(ii)臨床機器の各々に1つが作動的に関連付けられている、同じ数の同一でかつ互いに隣接している検体−搬送モジュールとを備える。本発明によって、検体−搬送モジュールの各々は、(a)関連付けられている機器の検体−吸引プローブが検体−容器に接近して検体−容器から検体を吸引することが可能である位置に個々の検体−容器ラックを搬送する機能と、(b)隣接した検体−搬送モジュールのX/Y可動検体−搬送システムによって搬送ラックが作用を受けかつさらに搬送されることが可能である位置に個々の検体−容器ラックを搬送する機能の両方を果たす、X/Y可動検体−搬送システムを備える。
【0011】
したがって、両方の機能、すなわち、吸引のために検体を提供する機能と、1つの機器から別の機器に検体を移送する機能とを果たすために、同じ検体−搬送システムを使用することによって、これらの作業を行うために2つの互いに独立した搬送を必要とする従来技術の要件が取り除かれ、および、より単純でより信頼性が高い作業セルが結果的に得られる。本発明の検体−搬送モジュールが、単独で動作する作業セルのあらゆる個別の臨床機器の検体提供要件に関する機能性において完全であるだけでなく、隣接した同一の検体−搬送モジュールに検体−容器を搬送し、および、この検体−搬送モジュールから検体−容器を受け取ることも可能であり、これによって複数の検体−搬送モジュールが作業セルのための検体−搬送システムとして集合的に機能するということが理解されるだろう。
【0012】
本発明の第3の側面では、本明細書で説明されている検体−搬送モジュールは、多機器臨床作業セルの互いに隣接するモジュールの間で検体−容器ラックを搬送するための複数の独立した検体ラック−搬送機構を備えている。したがって、本発明の別の好ましい実施態様では、上述の1次ラック−搬送機構とは無関係である冗長ラック−搬送機構が、モジュールの第1および第2のラック−移送ステーションの間で個々の検体−容器ラックを搬送するために設けられており、これによって、1次搬送システムまたはこれに関連した臨床機器の故障の発生時に必要とされる可能性があるように、個々の検体−搬送モジュールがバイパスされることが可能であり、このことが、こうした故障にも係わらずに作業セルが機能し続けることを可能にする。
【0013】
本発明の第4の側面によって、検体−容器ラックによって支持されている複数の検体−容器の1つによって各々が収容されている複数の生物検体を同時に混合するための新しくかつ改良された装置が提供される。この装置は、そのラック−係合部材に接触するように動かされる検体−容器ラックに着脱自在に係合するための可動的に取り付けられているラック−係合部材と、収容されている検体が完全に混合されるように、係合されたラックの検体容器を反復的に反転および再反転させるのに十分な長さの弓形経路に沿ったラック−係合部材の往復移動を実現するための手段とを含む。混合装置の可動的に取り付けられているラック−係合部材と検体容器ラックとの間に確実な係合を実現するために、舌片−溝(tongue−in−groove)タイプの係合がこれらの要素の間に生じさせられ、および、検体混合動作中にラック−係合部材とこれに係合されたラックとの間の係合解除を生じさせる傾向があるあらゆる振動力または他の力を克服する力をラック−係合部材と検体−容器ラックとの間に及ぼすために磁気部材が使用されることが好ましい。
【0014】
本発明の第5の側面によって、本明細書に説明されているタイプの検体−搬送モジュールの投入バッファは、そのバッファ内の出口位置に向かって投入待ち行列に沿って検体−容器ラックのスタックを前進させる働きをするカム駆動プッシャ機構を備えている。このプッシャ機構が、そのバッファの前部に向かって1対の可動的に取り付けられているプッシャ指片を前進させる傾向がある力がこれらの指片上に及ぼされる時に、そのプッシャ指片がそのバッファの中に延びることが引き起こされ、および、反対の方向にその指片上に力が及ぼされる時にそのプッシャ指片がそのバッファから後退することが引き起こされる、1対の可動的に取り付けられているプッシャ指片を備える。
【0015】
本発明のさらに別の側面によって、本明細書に説明されているタイプの検体−搬送モジュールの排出バッファは、装入位置からその排出バッファの末端の取り出し位置に向かって処理済みのラックを押すようになっている可動的に取り付けられているラック−押し部材を備える。この部材の駆動力が、検体−搬送モジュールの検体−処理部分全体にわたって検体−容器ラックを搬送するために使用される同一のX/Y可動トラック(X/Y movable truck)によって提供されることが好ましい。処理済みのラックが、ラックの幅よりもわずかに大きい距離だけ排出バッファの中に押し込まれ、このことが、そのモジュールの検体−処理部分内でラックを搬送するために使用される同一のラック−搬送方式(例えば、磁力)を使用して、例えば、対象の検体に対する反復検査またはリフレックス(reflex)検査を行うために、X/Y可動トラックがこのラックの排出待ち行列内の最後の検体−容器ラックを取り出すことを可能にすることが好ましい。ラックが排出バッファ内に押し込まれる毎に、排出バッファの取り出し位置に向かって排出待ち行列全体を前進させるのに十分な力によって、この押し込みが行われる。
【0016】
本発明とその様々な側面と利点とが、同じ照合文字が同じ部品または構成要素を示す添付図面を参照しながら、後続の好ましい実施形態の詳細な説明からより適切に理解されるだろう。
例えば、本発明は以下を提供する。
(項目1)
(a)モジュール型の多機器臨床作業セルの複数の検体−処理機器の各々の検体−吸引プローブに対して検体−容器の個々のラックを相対的に移動させるために、および、(b)前記作業セルの互いに隣接する検体−処理機器の互いに隣接する検体−搬送モジュールの間で前記検体−容器ラックを搬送するための、前記作業セルの前記複数の検体−処理機器の各々と共に使用するようになっている検体−搬送モジュールであって、
(a)ハウジングであって、(i)このハウジングに提供される複数の検体−容器ラックを受け取って支持するための投入バッファと、(ii)関連した検体−処理機器の前記吸引プローブによって接近されるべき位置で検体−容器ラックを支持するための検体−吸引ステーションと、(iii)前記モジュールから取り除かれるべき位置で複数のラックを支持するための排出バッファと、(iv)個々の検体−容器ラックが、隣接する検体−搬送モジュールによって接近されて前記検体−搬送モジュールに移送されることが可能であるラック−移送ステーションとを画定するハウジングと、
(b)前記投入バッファと検体−吸引ステーションと排出バッファとラック−移送ステーションとの間で前記ラックを搬送するための、前記検体−容器ラックの各々に作動的に連結可能である1次ラック−搬送機構と、を備える検体−搬送モジュール。
(項目2)
前記1次ラック−搬送機構は、前記検体−処理セクション内でラックを選択的に搬送するために磁力によって前記ラックと相互作用する磁気搬送システムを備える項目1に記載の検体−搬送モジュール。
(項目3)
前記磁気搬送システムは、平面内で互いに垂直な方向に前記ラックを選択的に搬送するようになっているX/Y可動磁界発生手段を備える項目2に記載の検体−搬送モジュール。
(項目4)
前記1次ラック−搬送機構は、前記ラック−移送ステーションにおいて前記ハウジングの外側に検体−容器ラックの一部分を搬送するようになっている項目1に記載の検体−搬送モジュール。
(項目5)
前記ハウジングは、吸引の前にそのそれぞれの容器内の検体を混合するための検体−混合装置を支持する項目4に記載の検体−搬送モジュール。
(項目6)
前記検体−混合装置は、そのそれぞれの容器内の検体を混合するために検体−容器ラックを選択的に反転させるための手段を備える項目5に記載の検体−搬送モジュール。
(項目7)
前記反転手段は前記ハウジング上に可動的に取り付けられているプレートを備え、前記プレートは、検体−容器ラックに着脱自在に係合するための手段を有し、および、前記プレートは、係合されたプレートの前記検体−容器内の検体が反転させられて混合されるほどまでに弓形の経路に沿って移動可能である項目6に記載の検体−搬送モジュール。
(項目8)
前記ハウジングは、個々の検体−容器ラックが2つの互いに隣接する検体−搬送モジュールに搬送されおよびこれらの検体−搬送モジュールから受け取られることが可能である第1および第2のラック−移送ステーションを画定し、および、前記ラック−搬送機構は、前記第1および第2のラック−移送ステーションの間で個々の検体−容器ラックを搬送するように選択的に動作可能である項目1に記載の検体−搬送モジュール。
(項目9)
前記第1および第2のラック−移送ステーションの間で個々の検体−容器ラックを搬送するための、前記1次ラック−搬送機構から独立している、2次ラック−搬送機構をさらに備える項目8に記載の検体−搬送モジュール。
(項目10)
(i)その臨床機器の各々に関連付けられている検体−吸引プローブに提供される液体の生物検体を処理するようになっている少なくとも2つの臨床機器と、(ii)前記臨床機器の各々に1つが作動的に関連付けられている、同じ数の同一の検体−搬送モジュールとを備えるモジュール型の多機器臨床作業セルであって、前記検体−搬送モジュールの各々は、
(a)(i)関連した機器の前記検体−吸引プローブ及び、(ii)前記作業セルの隣接した検体−処理機器の隣接した検体−搬送モジュールに個々の検体−容器ラックが移送可能であるラック−移送ステーションとに対して、個々の検体−容器ラックを選択的に提供するための1次検体−搬送手段と、(b)隣接した機器から、または、外側の供給源から、検体容器ラックを受け取るための手段と、(d)関連した機器によって処理された検体−容器ラックを格納するための手段と、
を備えるモジュール型の多機器臨床作業セル。
(項目11)
前記受け取り手段は、それに提供される複数の検体−容器ラックを受け取って支持するための投入バッファを備え、および、前記格納手段は、前記検体−吸引プローブに各々が提供され終わった後に複数のラックを支持するための排出バッファを備える項目10に記載の装置。
(項目12)
前記1次ラック−搬送機構は、前記検体−処理セクション内でラックを選択的に搬送するために磁力によって前記ラックと相互作用する磁気搬送システムを備える項目10に記載の装置。
(項目13)
前記磁気搬送システムは、平面内で互いに垂直な方向に前記ラックを選択的に搬送するようになっているX/Y可動磁界発生手段を備える項目12に記載の装置。
(項目14)
前記1次ラック−搬送機構は、関連したモジュールの前記ハウジングの外側の位置に検体−容器ラックの一部分を搬送するようになっており、および、隣接した機器の隣接した検体−搬送モジュールは、前記搬送されたラック部分を受け取って前記隣接した検体−搬送モジュール内の位置に前記ラック部分の関連したラックを前進させるように位置決めされている項目10に記載の装置。
(項目15)
前記検体−搬送モジュールの各々はそのそれぞれの容器内の検体を混合するための検体−混合機構を備える項目14に記載の装置。
(項目16)
前記検体−混合機構は、そのそれぞれの容器内の検体を混合するために前記検体−容器ラックを選択的に反転させるための手段を備える項目15に記載の装置。
(項目17)
前記ハウジングは、個々の検体−容器ラックが2つの互いに隣接する検体−搬送モジュールに搬送されおよびこれらの検体−搬送モジュールから受け取られることが可能である第1および第2のラック−移送ステーションを画定し、および、前記ラック−搬送機構は、前記第1および第2のラック−移送ステーションの間で個々の検体−容器ラックを搬送するように選択的に動作可能である項目10に記載の装置。
(項目18)
前記第1および第2のラック−移送ステーションの間で個々の検体−容器ラックを搬送するための、前記1次ラック−搬送機構から独立している、2次ラック−搬送機構をさらに備える項目16に記載の検体−搬送モジュール。
(項目19)
容器−ラックによって支持されている複数の容器の1つによって各々が収容されている複数の異なる液体を同時に混合する装置であって、
(a)混合ステーションにおいてそのラック−係合部材と接触するように移動される容器ラックに着脱自在に係合するようになっている可動的に取り付けられているラック−係合部材と、
(b)収容されている液体が完全に混合されるように、前記ラック−係合部材がその弓
形の経路に沿って移動する時に、係合されたラックの前記検体容器を反転させるように形成されている弓形の経路に沿って反対方向に前記ラック−係合部材を反復的に前進させるための手段と、
を備える装置。
(項目20)
前記ラック−係合部材は、前記混合ステーションにおいて前記容器とラック−係合部材との接触表面の間でスライド移動が生じさせられる時に、容器ラックの壁の中に形成されている1対の互いに間隔が開けられたノッチに係合するようになっている舌片部材を備える項目19に記載の装置。
(項目21)
前記可動的に取り付けられているラック−係合部材と前記容器ラックとの間に磁気吸引を生じさせるための手段が設けられており、および、前記吸引は、係合されたラックから前記ラック−係合部材を分離させる傾向があるあらゆる力を克服するように作用する請求項19に記載の装置。
(項目22)
前記経路は、約135度の円弧を経て延びる弓形の経路である項目19に記載の装置。(項目23)
前記前進手段は、前記ラック−係合部材に直接的に係合されている回転駆動される駆動軸を有する双方向モータを備える項目22に記載の装置。
(項目24)
関連した検体−搬送モジュールによって1つずつ逐次的に搬送されることになっている複数の検体−容器ラックを受け取って一時的に格納するための投入バッファであって、
(a)直線待ち行列の形に配列された複数の検体−容器ラックを受け取って支持するためのラック支持表面と、
(b)前記表面から上方に延びる1対の互いに間隔を置いた互いに平行な側壁であって、前記側壁の相互間の隙間によって画定されている直線経路に沿って、ラック−装入位置からラック−搬送位置に前記待ち行列の各検体−容器を案内する働きをする1対の互いに間隔を置いた互いに平行な側壁と、
(c)前記直線経路に沿って前記表面によって支持された1つまたは複数の検体−容器ラックを前進させるためのラック−押し機構であって、(1)(i)前記側壁内に形成されている直線走路内でのスライド移動のための、(ii)前記隙間内で検体−容器ラックの表面に駆動的に係合するために前記側壁の間の前記隙間内にそのプッシャ指片が位置している伸長位置と、前記前記隙間の外側に位置している引っ込み位置との間の旋回移動とのための、前記側壁の一方の上に可動的に取り付けられているプッシャ指片と、(2)前記走路内でどちらかの方向に前記プッシャ指片を選択的に前進させるための双方向モータと、(3)前記モータが第1の方向に動作する時に前記プッシャ指片をその伸長位置に向かって旋回させるために、および、前記双方向モータが反対方向に動作する時に前記プッシャ指片をその引っ込み位置に向かって旋回させるための、前記双方向モータに作動的に連結されている手段とを備えるラック−押し機構と、
を備える投入バッファ。
(項目25)
検体−搬送モジュールの検体−処理部分を通して検体−容器ラックを搬送するためのX/Y可動トラックを備えるタイプの自動化された検体−搬送モジュールによって搬送される複数の検体−容器ラックを受け取って一時的に格納するための排出バッファであって、
(a)直線待ち行列の形に配列された複数の検体−容器ラックを受け取って支持するためのラック−支持表面と、
(b)前記表面から上方に延びる1対の互いに間隔を置いた互いに平行な側壁であって、前記側壁の間の隙間によって画定されている直線経路に沿って、前記排出バッファの入口からラック−取り外し位置に前記待ち行列の各検体−容器を案内する働きをする1対の互いに間隔を置いた互いに平行な側壁と、
(c)前記直線経路に沿って前記表面によって支持されている1つまたは複数の検体−容器ラックを前進させるためのラック−押し機構であって、(i)(1)前記排出バッファ入口に位置している検体−容器ラックの表面にこのラック−押し機構が駆動的に係合する第1の位置から、(2)このラック−押し機構が、検体−容器ラックの幅よりもわずかに大きい距離だけ前記経路に沿って、係合された検体−搬送ラックを移動させ終わっている第2の位置にスライドする形で移動可能である可動的に取り付けられているラック押し部材を備え、および、前記X/Y搬送システムのX/Y移動に応答して移動可能であるラック−押し機構と、
を備える排出バッファ。
(項目26)
検体−容器によって保持されている検体を処理するためのモジュール型機器システムであって、
(a)検体−容器から抜き出された検体の少なくとも一部分を処理するための検体−処理構成要素であって、この検体−処理構成要素に作動的に関連付けられている検体−抜き出しステーションを含む検体−処理構成要素と、
(b)(i)前記検体−抜き出しステーションへ、および、前記検体−抜き出しステーションから、および、(ii)(1)容器がこの容器−搬送構成要素から遠ざかるように移送されるように位置させられており、および、(2)容器が、この容器−搬送構成要素による搬送のためにこの容器−搬送構成要素によって受け取られる、1対の互いに間隔を置いた容器−移送場所の各々に、および、これらの容器−移送場所の各々から、検体−容器を搬送するように構成されている容器−搬送構成要素とを備えるモジュール型機器システム。
(項目27)
前記容器−搬送構成要素は、(a)(i)前記検体−抜き出しステーションに、および、前記検体−抜き出しステーションから、および、(ii)前記対の容器−移送場所のどちらかに、および、前記対の容器−移送場所のどちらかから、検体−容器を搬送するための1次搬送システムと、(b)前記対の容器−移送場所の間で検体−容器を搬送するための、前記1次搬送システムから独立している、2次搬送システムとを備える項目1に記載のモジュール型機器システム。
(項目28)
前記容器−搬送構成要素は、前記容器−搬送構成要素による搬送中に容器を支持する容器−支持表面を含み、および、前記容器−搬送構成要素は、(i)各々の容器−移送場所において前記容器−支持表面を少なくとも部分的に越えて延びるように検体−容器を位置させるように、および、(ii)各々の検体−移送場所において前記容器−支持表面上に部分的にだけすでに位置させられている検体−容器を受け取るように構成されている請求項1に記載のモジュール型機器システム。
(項目29)
前記容器−移送場所における検体−容器の位置決めを信号伝送するために各々の容器−移送場所に配置されているセンサをさらに備える項目1に記載のモジュール型機器システム。
(項目30)
前記容器−搬送構成要素は、(i)複数の検体容器を受け取って格納するように、および、(ii)前記容器−搬送構成要素による取り除きと搬送とのための位置に各々の受け取られた検体−容器を前進させるように構成されている投入バッファを備える項目1に記載のモジュール型機器システム。
(項目31)
前記容器−搬送構成要素は、(i)複数の検体−容器を受け取って格納するように、および、(ii)取り外しのための前記排出バッファ内の位置に各々の受け取られた検体容器を前進させるように構成されている排出バッファを備える項目1に記載のモジュール型機器システム。
(項目32)
前記容器−搬送構成要素は、(i)複数の検体−容器を受け取って格納するように、および、(ii)取り外しのための前記排出バッファ内の位置に各々の受け取られた検体容器を前進させるように構成されている排出バッファを備える項目5に記載のモジュール型機器システム。
(項目33)
前記容器−搬送構成要素は、各々の移送場所において少なくとも部分的に前記検体−容器搬送構成要素を越えて延びるように検体−容器を位置させることによって、各々の移送場所において前記容器−搬送構成要素から検体−容器を移送するように、および、各々の容器−移送場所において前記容器−搬送構成要素の少なくとも外側にある検体−容器を受け取って搬送することによって、各々の容器−移送場所において前記機器システムの外側から検体−容器を受け取るように、構成されている項目7に記載の機器システム。
(項目34)
前記容器−搬送構成要素は、(a)(i)前記検体−抜き出しステーションに、および、前記検体−抜き出しステーションから、および、(ii)前記対の容器−移送場所のどちらかに、および、前記対の容器−移送場所のどちらかから、検体−容器を搬送するための1次搬送システムと、(b)前記対の容器−移送場所の相互間で検体−容器を搬送するための、前記第1の搬送システムから独立している、2次搬送システムとを備える項目8に記載のモジュール型機器システム。
(項目35)
作業セルであって、
(a)検体容器によって保持されている検体を処理するための第1の機器システムであって、
(i)検体−容器から抜き出された検体の少なくとも一部分を処理するための検体−処理構成要素であって、この検体−処理構成要素に作動的に関連付けられている検体−抜き出しステーションを含む検体−処理構成要素と、
(ii)(1)前記検体−抜き出しステーションに、および、前記検体−抜き出しステーションから、および、(2)各々において(A)容器がこの容器−搬送構成要素から遠ざかる形で移送されるように位置させられており、および、(B)容器がこの容器−搬送構成要素による搬送のためにこの容器−搬送構成要素によって受け取られる、第1の容器−移送場所と第2の容器−移送場所との各々に、または、前記第1の容器−移送場所と前記第2の容器−移送場所との各々から、検体−容器を搬送するように構成されている容器−搬送構成要素とを含む第1の機器システムと、
(b)検体容器によって保持されている検体を処理するための第2の機器システムであって、
(i)(1)容器がこの容器−搬送構成要素から遠ざかる形で移送されるように位置させられており、および、(2)容器がこの容器−搬送構成要素による搬送のためにこの容器−搬送構成要素によって受け取られる容器−移送場所に、および、前記容器−移送場所から検体−容器を搬送するように構成されている容器−搬送構成要素を含む第2の機器システムと、を含む作業セルにおいて、
(c)前記第1の機器システムと前記第2の機器システムは、前記第1の機器システムの第1の容器−移送場所と前記第2の機器システムの前記容器−移送場所とが互いに隣接しているように構成されており、かつ、互いに隣接して位置させられており、
これによって、前記第1の機器システムの前記検体−容器搬送機構と前記第2の機器システムの前記検体−容器搬送機構とが、追加の移送装置なしに互いの間を検体容器を通過させる、
作業セル。
(項目36)
(a)検体容器によって保持された検体を処理するための第3の機器システムであって、(i)(1)容器がこの容器−搬送構成要素から遠ざかる形で移送されるように位置させられており、および、(2)容器がこの容器−搬送構成要素による搬送のためにこの容器−搬送構成要素によって受け取られる容器−移送場所に、および、前記容器−移送場所から、検体−容器を搬送するように構成されている容器−搬送構成要素と、
(b)前記第1の機器システムの前記第1および第2の容器−移送場所は互いに離れており、
(c)前記第1の機器システムと前記第3の機器システムは、前記第1の機器システムの前記第2の容器−移送場所と前記第3の機器システムの前記容器−移送場所とが互いに隣接しているように、構成されており、かつ、互いに隣接して位置させられており、
これによって、前記第1の機器システムの前記検体−容器搬送機構が、追加の移送装置なしに、前記第2の機器システムと前記第3の機器システムとの前記検体−容器搬送機構に、および、この前記検体−容器搬送機構から、検体容器を通過させるをさらに含む項目10に記載の作業セル。
(項目37)
(a)前記第1の機器システムの前記容器−搬送構成要素は、(i)複数の検体容器を受け取って格納するように、および、(ii)前記第1の機器システムの前記容器−搬送構成要素による取り除きと搬送とのための位置に各々の受け取られた検体−容器を前進させるように構成されている、投入バッファをさらに備え、
(b)前記第2の機器システムの前記容器−搬送構成要素は、(i)複数の検体容器を受け取って格納するように、および、(ii)前記第2の機器システムの前記容器−搬送構成要素による取り除きと搬送とのための位置に各々の受け取られた検体−容器を前進させるように構成されている、投入バッファをさらに備え、
これによって、検体容器が、前記第1および第2の機器システムの両方の投入バッファ内において前記作業セルの中に送り込まれる項目10に記載の作業セル。
(項目38)
(a)前記第1の機器システムの前記容器−搬送構成要素は、(i)複数の検体容器を受け取って格納するように、および、(ii)取り出しのために前記排出バッファ内の位置に各々の受け取られた検体−容器を前進させるように構成されている排出バッファをさらに備え、
(b)前記第2の機器システムは、(i)複数の検体容器を受け取って格納するように、および、(ii)取り出しのための前記排出バッファ内の位置に各々の受け取られた検体−容器を前進させるように構成されている、排出バッファをさらに備え、
これによって、検体容器が、前記第1および第2の機器システムの両方の排出バッファから前記作業セルから取り除かれる項目12に記載の作業セル。
(項目39)
(a)前記第1の機器システムの前記容器−搬送機構は、各々の移送場所において少なくとも部分的に前記第1の機器システムの前記検体−容器搬送機構を越えて延びるように前記検体−容器を位置させることによって、各々の移送場所において前記第1の機器システムから検体容器を移送するように、および、各々の移送場所において前記第1の機器システムの少なくとも外側にある検体容器を受け取って搬送することによって、各々の移送場所において前記第1の機器システムの外側から検体−容器を受け取るように、構成されており、
(b)前記第2の機器システムの前記容器−搬送機構は、各々の移送場所において少なくとも部分的に前記第2の機器システムの前記検体−容器搬送機構を越えて延びるように前記検体−容器を位置させることによって、前記移送場所において前記第2の機器システムから検体容器を移送するように、および、各々の移送場所において前記第2の機器システムの少なくとも外側にある検体容器を受け取って搬送することによって、前記移送場所において前記第2の機器システムの外側から検体−容器を受け取るように、構成されており、
(c)前記第1の機器システムと前記第2の機器システムは、前記第1の機器システムの前記検体−容器搬送機構が前記第2の機器の前記移送位置において前記第1の機器システムの前記検体容器搬送機構を越えて延びるように前記第1の移送場所に検体容器を位置させ、および、前記第2の機器システムの前記検体−容器搬送機構は、前記第1の機器システムの前記第1の移送場所において前記第2の機器システムの前記検体−容器搬送機構を越えて延びるように前記移送場所に検体容器を位置させ、
これによって、検体容器は、前記第1および第2の機器システムの前記検体−容器搬送機構によって前記第1の機器と前記第2の機器システムとの間で搬送される項目10に記載の作業セル。
(項目40)
多機器システム作業セルの機器システムの間で検体−容器を搬送する方法であって、
(a)検体容器がこの検体−容器搬送構成要素によって受け取られ、および、この検体−容器搬送構成要素から移送される2つの移送場所の各々に、および、この2つの移送場所から検体容器を搬送するための検体−容器搬送構成要素を、複数の機器システムの各々に提供することと、
(b)互いに隣接する機器システムの移送場所が互いに検体−容器を送りおよび互いから検体容器を受け取るように前記多機器システム作業セルの少なくとも1つの他の機器システムに隣接して各々の機器システムを位置させることと、
(c)前記多機器システム作業セルの開始機器システムの検体−容器搬送構成要素による搬送のために使用可能である検体容器を識別することと、
(d)前記作業セルの所望の行き先機器システムを識別することと、
(e)前記作業セルの隣接した受け取り機器システムに対して前記識別された検体容器を移送することを前記開始システムの前記搬送構成要素に生じさせることと、
(f)前記隣接した受け取り機器システムの前記搬送構成要素が前記識別された検体容器を受け取ることを生じさせることと、
(g)前記受け取り機器システムが前記所望の行き先機器システムであるかどうかを判定することと、
(h)前記受け取り機器システムが前記所望の行き先機器システムではない時に、隣接した機器に対して前記識別された検体容器を前記受け取り機器の前記搬送構成要素が移送することを生じさせることと、
(i)前記検体容器が前記所望の行き先機器システムに移送されるまで、段階(f)と段階(g)を繰り返すことと、
を含む方法。
(項目41)
(i)各機器システムの前記検体−容器搬送構成要素は、各々の移送場所において前記検体−容器搬送モジュールを少なくとも部分的に越えて延びるように前記検体−容器を位置させることによって検体−容器を移送し、および、前記検体−容器搬送モジュールに部分的にだけ延びる、位置させられている各々の移送場所において検体−容器を受け取り、
(ii)前記機器システムを位置させる段階は、各々の隣接した機器システムの前記検体−容器搬送モジュールの移送場所が前記隣接した検体−容器搬送モジュールの前記検体搬送モジュールの前記移送場所に直ぐに隣接しているように、前記機器システムを位置させることを含み、
これによって、2つの互いに隣接した機器システムは、追加の移送装置なしに、これらの2つの互いに隣接した機器システムの間で検体−容器を移送する項目15に記載の検体−容器を搬送する方法。
【図面の簡単な説明】
【0017】
【図1】図1は、本発明が特に有用である多機器作業セルの略図である。
【図2】図2は、臨床機器と組み合わされている検体−搬送モジュールの側面図である。
【図3】図3は、本発明を実現する検体−搬送モジュールの斜視図である。
【図4】図4は、それぞれに、図3に示されている装置によって搬送される様々な検体−容器ラックの空間的位置をさらに示す、図3に示されている装置の平面図と正面図である。
【図5】図5は、それぞれに、図3に示されている装置によって搬送される様々な検体−容器ラックの空間的位置をさらに示す、図3に示されている装置の平面図と正面図である。
【図6】図6は、1つのモジュールから別のモジュールへの検体−容器ラックの移送を示す多機器作業セルの2つの隣接し合う検体−搬送モジュールの平面図である。
【図7】図7は、図1から図6に示されている検体−搬送モジュールの検体−処理部分内の個々の検体−容器ラックのX/Y位置を制御するための好ましいX/Y駆動機構の斜視図である。
【図8A】図8Aは、図7の装置のY駆動部分の拡大斜視図である。
【図8B】図8Bは、図7の装置のY駆動部分の拡大斜視図である。
【図9】図9は、検体−容器ラックに磁気的に結合するための図7の装置で使用される磁気X/Yトラックの拡大底部斜視図である。
【図10】図10は、複数の検体容器を収容する検体−容器ラックの斜視図である。
【図11A】図11Aは、それぞれに、本発明の磁気検体−搬送システムと共に使用するようになっている好ましい検体−容器ラックの平面正面斜視図と底面背面図である。
【図11B】図11Bは、それぞれに、本発明の磁気検体−搬送システムと共に使用するようになっている好ましい検体−容器ラックの平面正面斜視図と底面背面図である。
【図12】図12は、図11Aと図11Bとに示されているラックの底部部分内に取り付けられるようになっている磁気吸引部材の斜視図である。
【図13】図13は、本発明の検体−搬送モジュールの混合装置に検体−容器ラックを作動的に連結する好ましい嵌合構造を示す。
【図14】図14は、本発明の検体−搬送モジュールの混合装置に検体−容器ラックを作動的に連結する好ましい嵌合構造を示す。
【図15A】図15Aは、概ね直立しておりかつ部分的に反転した位置にある検体−容器ラックの位置を示す、検体−混合装置の斜視図である。
【図15B】図15Bは、概ね直立しておりかつ部分的に反転した位置にある検体−容器ラックの位置を示す、検体−混合装置の斜視図である。
【図16A】図16Aは、検体−混合動作中の4つの異なる時点における検体容器ラックの位置を示す、図15Aおよび図15Bの検体−混合装置の側面図である。
【図16B】図16Bは、検体−混合動作中の4つの異なる時点における検体容器ラックの位置を示す、図15Aおよび図15Bの検体−混合装置の側面図である。
【図16C】図16Cは、検体−混合動作中の4つの異なる時点における検体容器ラックの位置を示す、図15Aおよび図15Bの検体−混合装置の側面図である。
【図16D】図16Dは、検体−混合動作中の4つの異なる時点における検体容器ラックの位置を示す、図15Aおよび図15Bの検体−混合装置の側面図である。
【図17A】図17Aは、本発明の検体−搬送モジュールの投入バッファ部分の後部部分と前部部分のそれぞれの斜視図である。
【図17B】図17Bは、本発明の検体−搬送モジュールの投入バッファ部分の後部部分と前部部分のそれぞれの斜視図である。
【図18A】図18Aは、図17Aおよび図17Bの装置を備える好ましいカム駆動プッシャ装置の拡大斜視図である。
【図18B】図18Bは、図17Aおよび図17Bの装置を備える好ましいカム駆動プッシャ装置の拡大斜視図である。
【図19A】図19Aは、図19Aの装置で使用されるカム部材を示す。
【図19B】図19Bは、図19Bの装置で使用されるカム部材を示す。
【図20A】図20Aは、本発明の検体−搬送モジュールの排出バッファ部分において検体−容器ラックを前進させるための好ましい機構の斜視図である。
【図20B】図20Bは、本発明の検体−搬送モジュールの排出バッファ部分において検体−容器ラックを前進させるための好ましい機構の斜視図である。
【図21】図21は、図20Aおよび図20Bに示されている装置の一部分の拡大斜視図である。
【図22】図22は、互いに隣接する検体−搬送モジュールの間で検体−容器ラックを前進させるための好ましい冗長駆動機構を示す。
【図23】図23は、互いに隣接する検体−搬送モジュールの間で検体−容器ラックを前進させるための好ましい冗長駆動機構を示す。
【発明を実施するための形態】
【0018】
さて、図面を参照すると、図1が、多機器作業セル10に提供される全血検体を分析および/または他の形で処理するようになっている多機器作業セル10を概略的に示している。この検体の各々は、(図10に示されている)検体−容器ラックRによって概ね直立の方向配置かつ直線的な配列の形に追加の容器と共に支持されている試験管または容器Cによって収容されている。図1に示されている作業セルでは、4つの別々の臨床機器12。14、16、18が、共通のマイクロプロセッサベースのシステムコントローラ20の制御を受けて動作する。機器12と機器14は、例えば、全血検体が従来のフローセルの検出アパーチャを通過する時に各セル上で行われるDC体積測定、RF伝導率測定、および/または、光散乱測定に基づいて全血検体の構成成分血液細胞を従来通りの仕方で識別および計数する働きをする血液学機器であってよい。機器14は、例えば、蛍光測定と、全血検体が光学フローセルの検出区域を通過させられる時にその各セル上で行われる光散乱測定、DC体積測定またはRF伝導率測定との組合せに基づいて、細胞タイプを従来通りの仕方で識別する働きをする蛍光流動細胞測光計であってもよい。機器18は、例えば、後で顕微鏡下で分析されることが可能な顕微鏡スライドガラス上の検体スメアを形成して染色するスライドメーカ(slide−maker)/スライドステイナ(slide−stainer)装置であってもよい。これらの臨床機器は、これらの機器が行う作業とこれらの機器の機械的構造との両方において大きく異なることがあり得るが、各々の機器は、その機器ハウジングの外側上に取り付けられており、かつ、したがって吸引の準備が整っている検体容器の提供のために接近可能である、可動的に取り付けられている吸引プローブアセンブリPAを共通して有する。このプローブアセンブリは、処理のために小体積の収容検体を吸引するためにそのアセンブリに提供された検体−容器の中に入るように(図面の平面の中への)垂直方向の移動と、および、検体−容器ラックによって支持されている検体−容器のいずれか1つに中に入るように(矢印によって示されているように)横方向の移動との両方を行うように取り付けられている。
【0019】
作業セル10は、さらに、複数の同一の検体−搬送モジュール(MOD 22、MOD
24、MOD 26、MOD28)を備え、このモジュールの1つは4つの臨床機器12、14、16、18の各々に動作的に連結されているか、または、他の形で関連付けられている。この検体−搬送モジュールの各々は、少なくとも2つの機能を提供する。第1に、このモジュールは、このモジュールが直接的に関連付けられている機器の検体−提供要件のすべてを満たす機能を果たし、すなわち、(i)そのモジュールの投入バッファに手動で配送される検体容器の複数のラックを受け取り、(ii)このラックを、投入バッファから、特定のラックの検体容器のすべてが関連機器の吸引プローブアセンブリにとって接近可能である検体−吸引ステーションに選択的に搬送し、および、(iii)そのラック内の容器のすべてまたは選択された1つからの所望の検体吸引の後に、排出バッファにラックを配送する働きをする。排出バッファへの配送時に、ラックが、そのラックがそのモジュールから手動で取り除かれることが可能な取り除き位置に前進させられてもよく、または、この代わりに、第1の試験結果が特定の標本の第2の吸引が必要とされることを示す場合または、第1の試験結果が明らかに誤りである場合のように、ラックがリフレックス(reflex)試験または反復試験のために検体−吸引ステーションに戻されてもよい。第2に、検体−搬送モジュールの各々は、他の臨床機器に関連付けられている互いに隣接するモジュールの間で検体−容器のラックを移動させ、これによって、例えばロボットアームまたはコンベヤシステムのような独立した検体−移動機構を全く必要とせずに作業セルの全機器が特定の検体を処理することを可能にする機能を果たす。後者の機能を実現するために、これらのモジュールの各々は隣接モジュールに堅固に連結されており、したがって、図6を特に参照して後述するように、これらのモジュールが検体を往復する形で通過させることを可能にする。検体−搬送モジュールの各々が、さらに、第3の機能、すなわち、後続の処理のために検体を調製するという機能を果たすことが好ましい。この標本調製は、その検体−混合装置に提供された検体−容器ラックを反復的に反転させて収容検体を反復的に反転および混合する働きをする検体−混合装置によって実現される。この標本−調製が、処理のためにその関連の機器によって吸引される直前に、検体−容器の内容物を混合する段階を含むことが好ましい。この混合は、検体−容器ラックとそのラックが保持する複数の容器とを反復的に反転させることによって実現される。好ましい検体−混合ステーションの構造上の詳細を、図15Aと図15Bとを参照して後述する。
【0020】
図2の側面図では、検体−搬送モジュール(例えば、MOD 22)とこれに関連した臨床機器(この場合には機器12)との間の関係が示されている。このモジュール/機器組合せの空間要件を最小にするために、この機器は、モジュールハウジングHの主要部分が臨床機器の主ハウジングH′の下に位置することを可能にするように設計されている。この機器の吸引プローブアセンブリPAは、機器ハウジングの前壁32の前方に延び、および、検体−搬送モジュールは、ラックによって支持されている検体−容器Cが、吸引プローブP′の垂直移動平面と一致する共通の垂直平面V内に配置されるように、吸引位置50(図3に示されている)で検体−容器ラックRを選択的に支持する働きをする。このプローブアセンブリの構造および動作の詳細は十分に理解されており、および、本発明の一部を形成しない。しかし、簡単に述べると、このプローブアセンブリの移動は、システムコントローラ20の制御によって動作する3つのステップモータM1、M2、M3によって制御される。ステップモータM1は、垂直平面すなわち図2のZ座標に沿って吸引プローブとストリッパ機構33とを移動させる働きをし、これによってストリッパ機構33の底面33Aが、吸引されるべきサンプルを収容する検体容器の頂部を取り囲むゴムシールS′の上面と接触するように下方に移動させられることが可能である。その次に、ステップモータM3は、プローブアセンブリの吸引プローブP′の垂直位置を制御する働きをし、これによって、プローブ先端が容器内から一定の体積の検体を吸引するためにシールS′に穿孔してその容器の中に入るように、プローブ先端が下方に駆動されることが可能である。その次に、検体の吸引の後に、モータM3は、容器の外に吸引プローブを引き上げる働きをする。吸引プローブが上方に移動するにつれて、ストリッパ機構33は、容器シールと吸引プローブとの間の摩擦力の結果として、上方に移動する吸引プローブがラックの外に容器を持ち上げようとする傾向を阻止するように、静止状態にかつシールS′との接触状態に保持される。プローブ先端が容器シールの頂部から離れると、モータM1は、ストリッパ機構が容器シールから十分に離れている垂直位置にストリッパ機構と吸引プローブの両方を持ち上げる働きをする。第3のステップモータM2は、図3に示されている検体−吸引ステーション50に位置しているラックによって支持されている検体容器の任意の1つに吸引プローブが接近することができるように、横方向すなわち水平平面内において吸引プローブアセンブリを選択的に移動させる働きをする。
【0021】
さらに、図3と図4を参照すると、本発明の検体−搬送モジュールのための好ましい構造が、(i)図11Aと図11Bとに示されているタイプの例えば20個までの検体−容器ラックRを受け取って支持するようになっている投入バッファ40と、(ii)検体吸引および処理のために関連した臨床機器の吸引プローブアセンブリに個々の検体−容器ラックがそれを通して前進させられて提供される検体−処理セクション44と、(iii)検体−容器ラックのそれぞれの検体が処理され終わった後に検体−容器ラックが中に集積される排出バッファ42とを画定する、ハウジングHを備える。投入バッファと排出バッファの各々が、検体−容器ラックがその経路に沿って途中で検体−処理セクション44に向かってまたは検体−処理セクション44から遠ざかるように移動することが可能な図3に矢印Aと矢印Bとでそれぞれに示されている単一の経路を画定するが、ラックは、図3に矢印D、E、Fで示されている3つの異なる経路にどれかに沿って、処理セクションを通過しながら移動することができる。通常は、特定のラックの検体−容器の処理において、ラックが検体−処理経路Dに沿って搬送され、この経路Dにおいてラックが検体−混合ステーション46と上述の検体−吸引ステーション50とを通過する。検体−吸引ステーション50に位置している間は、可動的に取り付けられている検体−混合プレート47は、後述する通りに、検体−吸引プロセスの前にラック内の容器の内容物が完全に混合されるように、位置50に位置している検体−容器ラックを持ち上げて反復的に反転させる働きをする。処理のために検体ラックを別の機器に移送する必要がある場合および時には、そのラックは、モジュールハウジングHの互いに反対側に位置する横方向の端縁に位置している2つのラック−移送ステーション52、54のどちらかにそのラックが位置させられることが可能であるように、経路Eまたは経路Fのどちらかに沿って前進させられる。ハウジングHの前部において、すなわち、モジュールの経路Fに隣接して、そのモジュールの全幅に沿って伸びる細長いハウジング60が設けられている。図22と図23とを参照して後述するように、後述される1次ラック−搬送機構が使用中であるかまたは他の理由のために中で動作していないモジュールをラックが通過させられることが可能であり、および、これによってバイパスすることが可能であるように、ハウジング60は、その検体−容器ラックを検体−搬送モジュールの経路Fに沿ってどちらかの方向に搬送する働きをする冗長駆動機構を含む。
【0022】
図3と図4に最も適切に示されているように、モジュールハウジングHは、投入バッファ40と排出バッファ42のラック−支持表面として機能するプレートの互いに反対側に位置する脚P1を有するU字形のトッププレートPと、処理セクション44内でラックがその上に支持される表面Sとして機能するプレートの基部部分P2とを備える。プレートPの表面Sは、滑らかで、平らで、無特徴であり、および、検体−容器ラックがモジュールの範囲全体にわたって移動させられる時に検体−容器ラックの底面を支持するのがこの表面である。プレートPが厚さ約1.5mmの非磁性のステンレス鋼プレートであることが好ましい。投入バッファ40と排出バッファ42の各々は、それぞれに1対の互いに平行な横壁40A、42Aと横壁42A、42Bとを備える。これらの壁は表面Sから上方に延び、および、検体−容器ラックの長さLよりもわずかに大きい距離だけ互いに間隔が空けられており、これによって、その検体−容器ラックは、図4に示されているようにバッファによって受け入れられて位置決めされることが可能である。2対の上方に延びる互いに平行なガイド部材G1およびG2とG3およびG4とが、モジュール間のラックの移送中にラックが経路Eと経路Fとの上で適正に位置合せされる(すなわち、傾くことがない)ことを確実なものにするために、ラック−移送ステーション52、54において表面S上に配置されている。ガイドG1は、さらに、投入バッファ内のラックがモジュールの検体−処理セクションの中に沿層方向に移動させられる前にそれに対して位置合せされることが可能である止め具として働く。第5のガイド部材G5が、各ラックが検体−吸引ステーション50に接近する時に、その各ラックを適正に位置合せする働きをする。
【0023】
図4の平面図には、検体−搬送モジュール内の個々の検体−容器ラックRの移動が最も適切に示されている。個々のラックは、典型的には投入待ち行列41内の最後のラックの後ろに、すなわち、前部ハウジング60から最も遠いラックの後ろに、投入バッファ40内の装入ステーションにおいて手動で装入される。このラックは、図17A、17Bと図18A,18Bとを参照して後述するカム駆動プッシャ機構によって、前部ハウジング60に向かって機械的に押しやられて、ガイド部材G1と概ね係合させられる。ガイド部材G1との接触時に、ラックが、モジュールの検体−処理ステーション44を通過する沿層方向の搬送のために位置合せされる。この搬送が、表面Sの下方に位置している、図7に示されておりかつ後述される磁気X/Y駆動機構70によって生じさせられることが好ましい。駆動機構70は、最初に、混合装置46とは反対側でありかつ混合装置46から離れている位置に経路Dに沿って(すなわち、X座標に沿って)ラックを前進させる働きをする。その次に、図4に示すように、ラックは距離y(約40mm)だけY方向に移動させられて、混合装置46のラック−係合プレート47に接触させられる。その次に、ラックはX方向に短い距離x(約12mm)だけ前進させられ、これによって、(図13と図14を参照して後述される、混合プレート47によって支持されている舌片47Aと、ラックによって支持されている溝(ノッチ160B)との構成を介した)ラックとプレートとの間の確実な係合を実現する。この時点で、ラック内の検体−容器は、そのそれぞれの内容物が混合され吸引される位置にある。後述するように、複数の検体(すなわち、ラック内の容器の数に一致する)が同時にかつ反復的に混合される。特定の連続した混合のA間に、後述するように、選択された容器からの検体がプローブアセンブリPAによって吸引される。混合が、図16A−16Cに示されているように、混合プレート47とこのプレートに取り付けられているラックとを回転させることによって生じさせられ、これによって検体−容器を一時的に反転させる。すべての検体が処理のために混合され吸引され終わった後に、ラックが、混合装置からそのラックを取り外すためにX軸に沿って距離xだけ後方に移動させられ、および、経路Dに到達するまでY軸に沿って(すなわち、ハウジング60に向かって)距離yだけ前方に移動させられる。その後で、ラックはX方向に移動させられて、排出バッファ42内の排出待ち行列43の中に送り込まれることが可能であり、この排出待ち行列43では、押し装置(図20A、20Bを参照して後述する)が、モジュールからラックが手動で取り外されることが可能な取り出しステーションに向かって経路Bに沿ってラックのスタックを前進させる働きをする。あるいは、処理済みのラックが経路E、Fのどちらかに移動させられることが可能であり、この経路E、Fでは、ラックは、隣接するモジュールによってラックが受け取られて搬送され、および、隣接する機器によって処理されることができるように、2つのラック−移送ステーション52、54のどちらかによって前進させられることが可能である。または、ラックは、例えばリフレックス検査(reflex testing)のために、吸引ステーションに戻されることが可能である。
【0024】
図6を参照すると、MOD 24からMOD 22へ検体−容器ラックR′を移送するプロセス中における、2つの互いに隣接する検体搬送モジュールMOD 22、MOD24が示されている。図示されているように、ラックR′は経路Fに沿ってMOD 24のラック−移送ステーション54と、MOD 22のラック−移送ステーション52の対応する経路Fとに搬送され終わっている。後述するように、ラックR′は、モジュールの上面の下に位置するMOD 24のX/Y磁気搬送システムによって示されている「跨り(spanning)」位置に前進させられ終わっている。この搬送システムは、2つの磁気吸引部材が取り付けられているラックの基部部分内の2つの位置にラックを磁気によって結合させる働きをする。この部材は、ラックの互いに反対側の末端において間隔を空けられている。図示されている位置、すなわち、ラックが2つの互いに隣接するモジュールに跨る位置にラックを前進させるために、ラックは最初に、そのラックの最先端がモジュールの端縁と概ね一致しておりかつそのラックの側部がガイド部材G4に隣接している位置に前進させられる。その次に、この磁気搬送機構は、ガイド部材G3に向かってY方向に搬送機構を移動させることによってラックから切り離される。ラックは、ガイドG4と係合しているために、この方向では磁気搬送機構に追従できないので、ラックと搬送機構との間の磁気結合が克服され、および、ラックがモジュールの端縁に残留するだろう。この後で、磁気搬送機構は、ラックによって支持されている2つの磁気吸引部材の一方だけに、すなわち、モジュール端縁からより内側寄りの部材だけに、磁気的に結合するように再位置決めされる。その次に、搬送機構は、ラックがMOD 24の端縁から離れて隣接のモジュールMOD 22の移送ステーションに進むようにそのラックを前進させる働きをする。その次に、MOD 22の磁気駆動システムは、そのシステムがラック移送ステーション52においてラックに磁気的に結合する位置に移動させられ、および、必要に応じてラックをMOD 22の表面S上を移動させる。検体−搬送モジュール全体(および作業セル)にわたってのラックの通行パターンを制御するシステムコントローラ20によって決定される通りに、検体−搬送モジュールの相互間のラック−移送が経路Eまたは経路Fのどちらかの上で生じさせられることが可能であるということが理解されるだろう。しかし、一方の経路が1つの方向にラックを移送するために使用され、および、他方の経路が反対方向にラックを移送するために使用されることが好ましい。ラック−移送ステーションの各々におけるラックの存在を検出する1対の光電センサはその図面には示されていない。別の検体−搬送モジュールに移送されることになっているラックがラック−移送モジュールの経路Eまたは経路Fの反対側の末端のどちらかに搬送される時には、そのラックの存在が移送モジュールのラック−移送ステーションにおけるセンサによって検出される。ラックがラック受け入れモジュールのセンサによってラック−移送ステーションにおいても検出される時には、その時点において、そのラックは、ラック受け入れモジュールのX/Yラック−搬送機構による作用を受ける位置にある。システムコントローラは、ラック受け入れモジュール内でラックをさらに搬送するようにラック受け入れモジュールのX/Y搬送機構を送るために、これらのセンサの出力に対して作用する。
【0025】
図7は、図3と図4に示す搬送経路D、E,Fに沿った任意の所望の場所にラックを位置決めするように、上述の検体−搬送モジュールの表面S全体にわたって互いに垂直な方向に検体−容器ラックを移動させるための好ましいX/Y駆動機構70を示す。この駆動機構70は、検体−容器ラックが駆動のために上に支持されている非磁性プレートPの下面の真下にかつこれに隣接してモジュールハウジングH内に取り付けられるようになっている。一般的に、この駆動機構は、表面Sの下方(すなわち、プレート60の下方)にX/Y可動磁界を発生させることによって、表面S上で検体−容器ラックを前進させる働きをする。後述するように、この磁界は、X/Y可動磁気トラックアセンブリ80によって支持されている1つまたは複数の永久磁石によって生じさせられる。各磁石によって発生させられる磁界は、搬送モジュールの非磁性支持プレートPを通過して、各々の検体−搬送ラックの基部部分内に支持されている1つまたは複数の(好ましくは2つの)磁気吸引部材と磁気的に結合する。この磁石と磁気吸引部材との間の磁気結合は、X/Y平面内を磁気トラックアセンブリが移動する時に磁気的に結合されたラックが追従するのに十分なだけ強力である。
【0026】
図7には、モジュールハウジングHの互いに反対側の側壁76、78によってその支持軸のそれぞれの末端において支持されている、1対の互いに間隔を置いておりかつ実質的に互いに平行である支持軸72、74を備える、X/Y駆動機構70が示されている。軸72と軸74との間の好ましい間隔は約16cmである。図示されているように、軸72と軸74はX座標に対して平行に延び、および、X座標に対して平行なスライド移動を実現するために上述の磁気トラックアセンブリ80を共に支持する。図8Aと図8Bとに最も適切に示されているように、このトラックアセンブリ80は、3つのスリーブ軸受83A、83B、84が中に取り付けられているトラック支持ハウジング82を備える。軸受83A、83Bはこのトラック支持ハウジングの互いに反対側の側部上に位置しており、および、軸72、すなわち、いわゆる「基準(datum)」軸上をスライドするように位置合せされている。トラック支持ハウジング82が基準軸に沿った移動中は常に基準軸に対して垂直なままであることを確実なものにするために、軸受83A、83Bのそれぞれの外側寄りの端縁(outboard edge)は互いに比較的に大きく(例えば、約10cm)離れている。軸受84は、トラック支持ハウジング内に形成されている水平スロット内に支持されており、および、この軸受は、X方向のトラックハウジングの移動中に軸74(「回転止め(anti−rotation)」軸)に沿って乗って進む。スロット取り付け台は、回転止め軸が基準軸に対して完全には平行ではなくても、その回転止め軸に沿って軸受84が滑らかにスライドすることを可能にする。しかし、これと同時に、スロット取り付け台はトラック支持ハウジングが(基準軸を中心として)旋回することを防止し、これによって、基準軸に沿ったトラックアセンブリの移動中はこのハウジングが常に水平(X/Y)平面内に留まることを確実なものにする。後述するように、トラック支持ハウジング自体は、Y座標に対して平行なスライド移動のために永久磁石軸受トラック86を支持する。トラック86が、各々の検体−容器ラックの基部部分内に支持されている1対の磁気吸引部材170(図12に示されている)と磁気的に相互作用し結合する1対のU字形磁石88、90を支持することが好ましい。磁石と磁気吸引部材170との間のこの磁気的な相互作用は、検体−容器ラックが表面Sを端から端までスライドして表面Sの下の磁気トラック86の移動に追従することを生じさせるのに十分なだけ強力である。したがって、上述の構成によって、表面S上の検体−容器ラックのX/Y位置が、表面Sの下方の磁気トラック86のX/Y位置によって決定される。
【0027】
図7に示されているように、X方向における(すなわち、軸72、74に沿った)LD2ハウジングの移動は、モジュールハウジング壁76、78の間に取り付けられているベルト駆動機構100によって生じさせられる。駆動機構100は、駆動プーリ104とアイドラプーリ105との間に跨るエンドレスベルト103を備える。駆動プーリ104は、ハウジング壁76上に取り付けられているX駆動モータM4の駆動軸によって回転駆動される。モータM4は、システムコントローラ20の制御を受けて動作する双方向ステップモータである。LD2ハウジング82の一方の末端に位置したタブ91が、X駆動機構のための「基準(home)」位置と、磁気トラック86のX位置に関する基準点とを提供するために、モジュールハウジング側壁76上に取り付けられている光電センサ(図示されていない)によって検出される。
【0028】
図8Aと図8Bとを参照すると、X/Y磁気駆動機構70のLD2ハウジング82は、上述のスリーブ軸受83A,83B、94が中に取り付けられている細長い棒110を備える。棒110は、その最上の表面に沿って直線レール112を支持する。レール112は、スリーブ軸受のそれぞれの縦軸線に対して垂直な方向に延びる。したがって、スリーブ軸受がそのスリーブ軸受のそれぞれの軸の上に取り付けられている時に、レール112はY座標に対して平行に延びる。一方、レール112は、上述の永久磁石軸受トラック86をスライド可能な形で支持する。永久磁石軸受トラック86は、レール112に沿ってスライドするようになっている溝形部材116を備える。部材116は、後述するように、永久磁石88、90が上に取り付けられている非磁性プレート118に堅固に連結されている。図8Bに最も適切に示されているように、プレート118は、第2のベルト駆動機構120によってレール112に沿って選択的に駆動される。この第2のベルト駆動機構120は、エンドレスベルト121と、1対のプーリ122、123と、フレックスケーブル(図示してない)を介してシステムコントローラ20と通信してこのシステムコントローラ20によって制御される双方向ステップモータM5(Y駆動モータ)とを備える。プーリ122は、モータM5の駆動軸124によって回転駆動されており、および、アイドラプーリ123が棒部材110から延びる固定された軸126上に回転可能な形で取り付けられている。軸124、126のそれぞれの軸線がX座標に対して平行に延びる。ベルト121が、図示されている駆動プーリとアイドラプーリ123との周りに匍わせられており、および、図9に最も適切に示されているブラケット127によって磁気トラックアセンブリ94に作動的に連結されている。したがって、ステップモータM5の駆動軸が回転するにつれて、ベルト121がプーリ123とプーリ123との上を前進し、および、このベルトと磁気トラックアセンブリ94との連結によって、Y方向におけるプレート118によって支持されている永久磁石の位置が、ステップモータ駆動軸の軸方向位置によって決定されるということが理解されるだろう。プレート118の底面から垂れ下がるフラグ部材129が、Y駆動機構の「基準」位置を決定するためにハウジングHの側壁76上に取り付けられている光電センサPS(図7に示されている)によって検出され、および、したがって、磁気トラックのY位置に関する基準点を提供する。ハウジングフレーム上のXセンサとYセンサとが、磁気トラックのX基準位置が最初に検出され、その次にそのY基準位置が検出されるように、配置されている。
【0029】
さらに図9を参照すると、永久磁石88、90の各々が、フラックスブリッジ130によって互いに連結されている1対の円筒形の棒磁石128、129を備える。この棒磁石はプレート118内に形成されている円筒形の穴によって受け入れられ、および、互いに反対の磁極(北極/南極)がプレート表面の上方を延びるように配置されている。この永久磁石は、プレート118の基部の中にねじ込まれておりかつフラックスブリッジ内に形成されているクリアランスホールを貫通して下方に延びる肩つきねじ134を取り囲むばね132によって上方に偏倚させられている。このコイルばねの一方の末端はボルト頭134Aによって支持されており、および、このばねの反対側の末端はフラックスブリッジに係合し、これによってフラックスブリッジを圧迫してプレート118の下面に接触させる。棒磁石の各々が約9.5mmの直径を有し、かつ、磁石が中心間で約19mmの間隔を空けられていることが好ましい。各磁石の長さは、フラックスブリッジがそのプレート118の下面に接触する時にプレート118の上方に約3mm突き出すような長さである。各磁石がネオジム添加鉄を含むことが好ましい。フラックスブリッジは鉄で造られており、かつ、約3mmの厚さである。X/Y駆動システム70が、約1mmの間隔が棒磁石の頂部とラック支持プレートPの底部との間に設けられていることが好ましい。
【0030】
次に図10を参照すると、上述の磁気検体−搬送装置と共に使用するようになっている好ましい検体−容器ラックRが、同様の複数の検体容器Cを受け入れるための複数(この場合には5つ)の区画152を画定するハウジング150を備えるものとして示されている。
【0031】
図示されている実施形態では、ハウジング150はプラスチックで作られており、および、2つの互いに噛み合うセクション、すなわち、容器区画152を画定する上部セクション154と、ラックによって受け入れられる検体容器を支持する基部セクション155とを備え、および、さらには、上述の磁気吸引部材170を収容する働きをする。この2つのセクションは互いに1つに嵌合させられ、および、基部セクションの互いに反対側の末端に設けられている1対の可とう性アーム156によって所定位置に保持される。図11Aと図11Bでは、ラックの上部セクションが、前方壁158と後方壁159との互いに反対側に位置した末端に配置されている1対の互いに平行な端壁157を備えるものとして示されている。複数の等間隔の横断壁160が前方壁と後方壁との間を延びる。この横断壁は容器区画152の各々を区分する働きをする。各区画の最上部には、容器心出しアセンブリ162が設けられている。容器心出しアセンブリ162は、区画内の異なる直径の検体容器に着脱自在に係合しかつその検体容器を心出しする働きをし、これによって受け入れられた容器の中央縦軸線が等間隔に位置させられ、および、共通平面内に互いに平行に配置される。したがって、この検体−容器ラックが検体−搬送モジュール内の検体−吸引位置において位置合わせされる時に、吸引プローブアセンブリは、垂直平面内を横方向へ(X座標に沿って)移動することによって、検体容器の各々の中心に反復的かつ確実に接近することが可能である。心出しアセンブリ162の詳細が、本明細書に引例として組み入れられている共通して譲渡された米国特許第5,687,849号に説明されている。容器心出しアセンブリと容器との間の係合力は、容器が繰り返し反転させられる時に、検体−混合動作中に容器が回転することまたは軸方向に移動することを防止するのに十分な大きさである。
【0032】
図11Bに示されているように、壁157、160の後部垂直端縁には、混合装置46の取り付けプレート47から突き出す水平方向に延びる舌片部材47Aを収容する構造が設けられている。この構造は、一連の互いに間隔を置いたノッチ157A、160A、160Bの形態をとる。ノッチ157A、160Aは長方形の形状でありかつ舌片部材47Aのための隙間を提供するが、上述の磁気搬送システムによってラックが混合プレート47の表面に沿って水平方向にスライドさせられるので、ノッチ160Bは、(台形の横断面を有する)舌片部材47Aの互いに反対側に位置した端縁を係合する形で受け入れるようになっている台形の形状を有する。この台形のノッチが、第1および第2の区画152と第4および第5の区画152とを区分する壁160の端縁の中に形成されていることが好ましい。長方形ノッチ157A、160Aの寸法は、舌片部材47Aが壁47に沿って障害なしにスライドしてノッチ160Bに係合することを可能にするような寸法である。2つのノッチ160Bと舌片47Aとの間の係合を完了させる時に、検体−容器ラックは、そのラック内の収容検体が混合させられることを生じさせる混合装置46によって反転させられるための、かつ、関連した臨床機器の吸引プローブアセンブリPAをそのラックによって支持される検体容器のどれか1つに接近させるための位置にある。
【0033】
図12に最も適切に示されているように、ラックハウジング150の基部セクション155は、1対のU字形の磁気吸引部材170を受け取って支持するように構成されている。部材170の各々が磁気吸引性のステンレス鋼440Cを備えることが好ましい。各々の部材170は、架橋部分170Bによって一方の末端で互いに連結されている一対の互いに間隔が開いた脚部分170Aを備える。部材170は、そのそれぞれの脚部分170Aの遠位末端171がラックの底面155Aに向かって下方に延びるように、ラックの基部部分内に支持されている。図11Bに示されているように、ラックの底面は、ラックの4つの隅において約0.5mmだけ下方に突き出す4つの長方形パッド172を画定する。これらのパッドは、ラックと搬送表面Sとの間の物理的接触だけを実現する。部材170の遠位末端171が、ラックの底面において、すなわち、パッド172の底面によって画定されている平面から約0.5mm手前で終端することが好ましい。遠位末端171の間の間隔は、磁気トラック80によって支持されている永久磁石88、90の磁極端の間の間隔に一致する。この間隔が9.5mmであることが好ましい。したがって、検体−容器ラックが表面S上でそのパッド172上に静止しており、かつ、部材170の遠位末端が磁石88、90の磁極端に並置されている時には、磁気回路が完成されており、および、一方の磁極端から発する磁束が部材170を貫通して反対側の磁極端の中に入る。磁極片の強さが、表面Sの下方を磁気駆動装置が移動する時にラックに対して動きを生じさせるのに十分なだけの磁気結合をラックと駆動機構との間で実現するように選択されている。互いに反対側に位置するU字形の構造、すなわち、永久磁石96、98のための一方のU字形構造と、磁気吸引部材170のための他方のU字形構造とを備えることが、「横方向の力」対「垂直方向の力」の比率を最大化することによって横方向の切り離し力に対して強力に抵抗する磁気結合を生じさせる。
【0034】
ラックRの基部セクション155のさらに別の特徴が図11Aと図11Bとに示されている。基部セクション155は、さらに、ラックの互いに反対側の端部に位置している1対のカップ形のポケット165A、165bを画定する。このポケットの各々は、(図22を参照して後述する)冗長ラック駆動機構を備える可動「足(foot)」部材を受け入れるようになっている。上述したように、この駆動機構は検体−搬送モジュールのハウジング60内に収容されている。この駆動機構は、表面Sの下方に位置する磁気駆動機構が使用されていないか、または、そうではなくて、その磁気駆動機構が使用中である場合に、経路Fに沿ってラックを前進させることによって特定の検体−搬送モジュールをバイパスすることが望まれる時に、経路F(図4)に沿ってラックを前進させるために使用される。この冗長駆動機構の足部材は、ラック−移送ステーション52またはラック−移送ステーション54のどちらか一方に位置しているラックのポケット165A,165Bのどちらかの中に入る時に、基部部分155の端壁155A上に横方向の力を及ぼし、これによって、経路Fに沿ってラックを沿層方向に引っ張ることによってラックを前進させる。
【0035】
図13と図14には、検体の混合のために混合装置46を各ラックに堅固に係合させる好ましい舌片−溝機構(tongue−and−groove mechanism)がさらに明瞭に示されている。上述したように、混合装置46は、混合の前にX/Y駆動機構によって個々のラックがそれに対して配置される、回転自在に取り付けられているプレート47を備える。混合の前に、プレート47は垂直平面内にあり、したがって、ラックを受け入れてそのラックに連結されるように位置決めされている。図13に示すように、プレート47は、より幾分か狭い中心領域182によって区分されている1対のラック係合領域180を有する、水平方向に延びる舌片部材47Aを支持する。領域180の横断方向の横断面は台形の形状であり、および、ラックとプレート47の表面との間の相対的なスライド移動の最中に、ラック壁160内に形成されている2つのノッチ160Bと嵌合するようになっているサイズである。当然のことながら、この移動は、上述の駆動機構70によって実現される。部材47Aの一方の遠位末端に形成されている止め表面184が、第1および第2の容器区画を区分する横断壁160に係合することによって、壁47に沿ったラックの滑動を阻止する働きをする。この時点で、領域180はノッチ160Bと係合しており、および、プレート47上に支持されている永久磁石186が、ラック基部155によって支持されている磁気吸引部材170の1つを磁気的に吸引する。ノッチ160Bの中へ舌片がさらに移動することを阻止する働きをする横断壁に対して止め表面184が係合状態になるようにその止め表面を動かす横方向の力成分をこの磁石が及ぼすように、この磁石の位置は部材170から(直接的に反対側にではなく)わずかにオフセットしている。磁石186と磁気吸引部材170との間の磁気吸引が、後続の混合動作中にラックが舌片領域180上を横方向に移動することを防止するのに十分なだけ強力である。しかし、磁石186と部材170との間の磁気的な相互作用は、混合機構からラックを引き離す時が来る時に、X/Y可動磁気トラックによってラック上に及ぼされる磁力によってその磁気的な相互作用が容易に克服されることが可能であるように十分に弱い。表面Sによって支持されている光電センサ188Aが、プレート47内に形成されている窓188Bを通してラックを検出し、および、ラックが混合のためにそのプレート上に位置していることと、そのプレート47が垂直に方向配置されていることとを示す信号をシステムコントローラに送る。
【0036】
図15Aでは、ラックが、混合の前に混合プレート47に作動的に連結されている形で示されている。プレート47は、システムコントローラ20の制御を受けて動作する双方向ステップモータM6の駆動軸191上で回転するように支持されているヨークアセンブリ190によって支持されている。プレート47が駆動軸軸線を中心として移動する時のそのプレートの角位置が、1対の光電センサPS1、PS2によって検出される。これらの光電センサは、駆動軸191と共にヨーク190が回転する時に、ヨーク190に堅固に取り付けられている半円形の円板192の周縁の周りの選択された位置に位置させられる。各々の光電センサは、互いに反対側に位置しておりかつ互いに間隔を置いているアーム195A、195Bの間に光放出器と光センサとを支持するヨーク形のハウジング195を備える。光電センサのそれぞれのヨークアームが、円板192の周縁内に形成されているノッチ192Aの通過を検出する位置において、円板192の互いに反対側の側面上に配置されている。光電センサは、円板の周縁の周りで互いに角度的に45度の間隔を開けられており、および、図15Aと図16Aとに示されているようにラックが垂直位置にある時に両方のセンサがそのそれぞれの光放出器からの光を検出する(両方のセンサが「ON」である条件)ように配置されている。PS1はその円板によって妨害されていない放出光を検出し、および、PS2は、その放出光がノッチ192Aを通過する時にその放出光を検出する。図15Bと図16Bとに示されているように、モータ軸191が45度の「キャップアップ(cap−up)」位置に回転させられ終わっている時は、PS1はノッチ102Aを通過する光を検出し、かつ、PS2は、円板によって光が遮断されているので光を検出しない。したがって、PS1はONであると同時に、PS2はOFFである。図16Aと図16Bとで見た場合に、駆動軸が反時計回りに回転し続けるので、両方の光電センサが、円板192の後縁がセンサPS2を通過するまでOFF状態にあり、この時点ではPS1がOFFであると同時にPS2がONである。この時点では、容器Cが45度の「キャップダウン(cap−down)」位置に反転させられている。このキャップダウン位置では、容器内の気泡がその容器の底部に移動させられ終わっており、これによってその容器内の液体検体を実質的に混合する。キャップダウン位置に到達し終わると、ステップモータが逆転し、および、容器がその45度のキャップアップ位置に戻され、これによって容器とその内容物とを再反転させる。このサイクルが数回繰り返される。検体がラック内の最初の容器から吸引される前に、検体ラックがそのキャップアップ位置とキャップダウン位置との間を8回転させられることが好ましい。この検体が処理されている最中は、ラックがさらに2回反転させられ、および、この処理が、ラック内の最後の検体が吸引され終わるまで続けられる。したがって、5つの容器を有するラック内の吸引されるべき最後の検体は、吸引の前に16回反転させられるだろう。
【0037】
上述の説明は、検体容器ラックが通常において本発明の検体搬送モジュールの処理セクション44を通過する形で搬送されおよびこのセクションによって処理される仕方に関する説明を完結する。後述の説明が、処理セクションの搬送機構によってラックが作用されることが可能である位置に投入バッファ40内の未処理の検体−容器ラックを前進させるための、および、排出バッファ42内の処理済みの検体−容器ラックを取り外し位置に搬送するための、好ましい機構に関する。特定の検体−搬送モジュールをバイパスするように経路Fに沿ってラックを前進させるための、ハウジング60によって収容されている冗長駆動機構を、さらに後述する。
【0038】
さて、図17Aと図17Bとを参照すると、これらの図面はそれぞれに図3の装置の投入バッファ40の後部部分と前部部分との特定の好ましい詳細を示す。ラックが、そのラックがその上を検体搬送モジュールの処理セクション44を通過して搬送される同一の表面S上でバッファ内に支持されている。バッファ側壁40Aが検体−容器ラックの長さLよりもわずかに大きい距離だけ互いに間隔を開けられており、および、ラックは、そのバッファ側壁上に可動的に取り付けられている1対のカム駆動プッシャ200によってそのバッファの前部に向かって押されて、ガイド部材G1と接触させられる。これらのプッシャは、1対の互いに反対側に位置する駆動軸204A、204Bを回転させる働きをする双方向ステップモータM7によってバッファ側壁の各々の中に形成されている走路(track)202内を前方と後方に同期した形で選択的に移動させられる。駆動軸240Bは、その2つのプッシャの同期された移動を調整するための手段としても機能する継ぎ手206によって延長される。駆動軸のそれぞれの自由端部の各々が駆動スプロケット206を支持する。後者は、バッファ側壁の外側に位置しており、および、駆動スプロケットとアイドラスプロケット210との間に支持されているケーブル208(実際には、いわゆる「ケーブルチェーン(cable chain)」)を前進させる働きをする。アイドラスプロケットは、バッファの前部に向かったバッファ側壁の外側上に位置している軸212上に回転するように取り付けられている。各々のケーブルの互いに反対側の端部は、図18Aと図18Bとに最も適切に示されている1対のクランプ214によってカム駆動プッシャ200に連結されている。駆動モータが、バッファの前部に向かってプッシャ200を引っ張る作用をする方向にケーブルを前進させる働きをする時には、ラック−押し指片218がプッシャハウジング220から外方に突き出て、その表面218Aがバッファ内に位置したラックの後側に接触する位置へとバッファ側壁から内方に延びる。図18Aに示されているように伸長された指片218を有するプッシャの連続移動が、ラックと、投入待ち行列内のそのラックの前方のあらゆるラックとを、ガイド部材G1に向かって移動させる働きをする。図17B内に示されている位置にラックが達すると、バッファ側壁上に取り付けられている光電センサPS4がこの場所におけるラックの存在を検出し、および、プッシャのさらなる動きを停止させるためにシステムコントローラ20に信号を伝送する。追加のラックが投入バッファによって受け取られる時に、モータM7が逆方向に動作し、これによってバッファの後部に向かってプッシャを引っ張る。ケーブル208が逆方向にプッシャ機構を引っ張る時に、指片218が、図18Bに示されている位置へとプッシャハウジング200内に引っ込む。
【0039】
図18Aと図18Bとを参照すると、プッシャ指片218が、軸線A′を中心として回転するようになっているカム部材222(図19Aと図19Bに示されている)の一体的部分であることが理解されるだろう。ケーブルクランプ214が、カム部材を回転させることが可能である駆動ピン226を受け入れるスロット224Aを有するハウジング224に堅固に連結されている。ケーブル208がプッシャを前方方向に引っ張るので、ハウジング224は駆動ピンに対して力を及ぼして、図19Aで見た場合に軸線A′を中心として時計回りにカム部材が回転することを引き起こす。プッシャ指片218が完全に伸長している図19Aに示されている位置にカムが回転すると、カム表面222Aがハウジング200内の強制止め具(positive stop)228に係合する。その次に、ケーブルによって加えられる連続した力が、直線走路202に沿ったプッシャ機構全体の移動を生じさせる。ハウジング224内のスロット224Aが、カム部材の回転中にそれがする必要があるので、駆動ピンが横向きに移動することを可能にする。駆動モータが逆転し、これによって反対側のケーブル末端がカム部材の(図19で見た場合の)反時計回りの回転を生じさせることを引き起こす時に、カムは、図19Bに示されている指片引っ込み位置に回転する。カムがこの位置に回転する時に、プッシャ指片表面がハウジング200内の第2の強制止め具230に接触する。駆動アーム226に対してケーブルによって加えられる力を続けることが、走路202に沿って反対方向に向かう、すなわち、投入バッファの後部に向かう、プッシャ機構全体の移動を結果的に生じさせる。システムコントローラは、投入バッファの後部壁40B上に取り付けられている光電センサPS5によって投入バッファ内の取り枠の数を追跡する。(図17Aを参照されたい。)このセンサは光伝送器240と光検出器242とを備え、光検出器242は、投入待ち行列内の最後のラックの後部表面による反射時に伝送光を検出する働きをする。光電センサからの最後のラックの距離としたがってバッファ内のラックの数とを計算するために、標準的な三角測量方法が使用される。動作時には、ラックが投入バッファ内のどこかに位置している時には常に、センサPS5が、測定されたその間の距離と先行の距離とが変化していることを検出するだろう。その次に、モータM7が、プッシャ指片を引っ込ませ、および、受け取られた最後のラックの背後の位置にそのプッシャを移動させる働きをするだろう。その次に、このモータは反対方向に回転し、プッシャ指片が伸長させられて最後のラックの後部と係合するようにプッシャ指片を駆動することを引き起こすだろう。その次に、プッシャは、投入待ち行列内の最初のラックが光電センサPS4に達し終わるまで、または、プッシャが走路202の末端に達するまで、前方に移動するだろう。プッシャの前方移動が、プッシャが3つのラックのスタックを、センサPS4によって最初のラックが検出される位置に押し動かす位置に制限されるだろう。X/Yトラックは、例えばテストラン(test run)の最後の3つのラックを取り出すために、3つのラックの幅Wの距離だけ投入バッファの中に(Y方向に)移動することが可能である。
【0040】
次に図20Aと図20Bを参照すると、好ましい排出バッファ42が、その排出バッファの中に処理済みの検体−容器ラックを放出するための別のタイプのラック−押し機構250を備えるものとして示されている。特定のラックの検体を吸引して処理する時に、上述のX/Y磁気駆動機構は、排出バッファの正反対側の位置に経路Dに沿ってX方向に沿層方向にラックを前進させる働きをする。その次に、X/Y駆動装置は、ラックの幅Wよりもわずかに大きい距離W′(約30mm)だけY方向に後方に磁気トラック86を移動させる働きをする。そうすることにおいて、そのトラックの最後尾の端縁86A(図8Aに示されている)が、図21に最も適切に示されている受板255に物理的に係合する。(図20Aと図20Bでは、支持プレートPは示されておらず、そのプレートの上方と下方の排出バッファの特徴だけが示されている。)受板255はラック支持プレートPの下方にかつ磁気トラックの移動経路内に配置されている。受板255は、上方に延びるタブ255Cによって、表面Sの上方に位置しているL字形のプッシャ部材257の1つの脚257Aに堅固に連結されている。脚257Aは、バッファ壁42Aの底部端縁に沿ってスライド移動するように取り付けられている。したがって、脚257AはY方向に延びる。プッシャ部材の他方の脚257Bが、脚257Aに対して垂直方向、すなわち、X方向に延びる。受板は、図20Aに示されているホームポジション(home position)に向かってコイルばね259によってばね偏倚させられている。この位置では、脚部材257Bは、図3に示されているガイド部材G3の直ぐ下方に位置する。
【0041】
排出バッファ内にラックが無い場合には、磁気トラックは、トラック86とラックとの間の磁気吸引だけによってそのバッファの中にラックを前進させる働きをする。しかし、トラック86がY方向に後方に移動するので、その最後尾の端縁が受板の直線端縁部分255Aに物理的に係合し、これによって、ばね259によって実現されるばね力に逆らって受板を後方に移動させる。受板が距離W′だけ後方に移動した後に、脚257Aの自由端部が、壁42Aの下部部分内に形成されているノッチ260の端縁260Aに概ね到達する。この箇所に到達し終わった後に、システムコントローラは、トラックが排出バッファから遠ざかって投入バッファに向かってX方向に移動するようにトラックを制御する。そうする際に、ラックがバッファ側壁42Bと接触することによってそのラックがトラックに追従することが防止されるので、トラックとラックとの間の磁気吸引が克服される。トラックが排出バッファから遠ざかってX方向に移動し続けるので、図8Bに示されている磁気トラックの後部の隅86Bが、受板の対角線端縁255Bに係合し始めるだろう。トラックがさらにX方向にその移動を継続するので、トラックの隅86Bが受板の対角線表面に沿って移動するのにつれて、受板は次第にそのホームポジションに戻る。
【0042】
次に、新たに処理されたラックの排出の用意が整っている時に、1つまたは複数の処理済みのラックがすでに排出バッファ内にある場合には、上述のプロセスと同じプロセスが繰り返される。しかし、ラックのスタックを排出バッファの中に後方に移動させるための駆動力が、プッシャ部材257の脚257Bによって加えられる力である。トラック86と単一のラックとの間の磁気吸引が、表面S上のラックのスタックを押すのに十分なだけ強力ではないということに留意されたい。したがって、上述の構成では、磁気トラック86が受板とその関連のプッシャ部材とに物理的に係合して距離W′だけ後方移動するので、排出待ち行列中の複数のラックが、おおよそ1つのラックの幅の分だけ後方に割り出しされる。バッファ壁42A上に取り付けられている1対のセンサPS6、PS7が、排出バッファがラックを受け取り終わった時点と、排出バッファが満杯である時点とを、それぞれに検出する。
【0043】
図6を参照して上述した仕方で幾つかの異なる臨床機器がそのそれぞれの検体−搬送モジュールの相互間で検体−容器ラックを搬送している作業セル環境内では、1つの機器から別の機器に検体−容器ラックを搬送するために特定の機器のX/Y駆動機構70をバイパスすることを望ましいものかまたは必須なものにする状況が生じる。例えば、中間の機器のX/Y駆動機構が機能していない3つの機器を備える作業セルでは、処理が特定のサンプルの処理を必要とする場合に、連続動作の能力を作業セルを提供することが望ましい。したがって、本発明の別の側面によって、図22と図23とに示されている冗長駆動機構280が、検体−搬送モジュールのX/Y搬送機構とは無関係に、そのラック−移送ステーションの1つから別のラック−移送ステーションへ、その検体−搬送モジュールを通して検体−容器ラックを前進させるために、各々の検体−搬送モジュール内に設けられている。この冗長駆動機構は各モジュールの前部ハウジング60の中に収容されており、および、ラック−移送ステーション52、54の間を延びる。
【0044】
図22を参照すると、駆動機構280は非円形(例えば星形)の横断面のスプライン軸281を備える。このスプライン軸は、モジュール側壁76、78に堅固に連結されている1対の互いに平行な支持プレート282、283の間を延びる。プレート282、283は、スプライン軸の縦軸線を中心として回転するようにスプライン軸を回転自在に支持する働きをする軸受を含む。軸281の回転位置が、壁282上に取り付けられている直線アクチュエータ285によって制御される。アクチュエータ285は、図23に示されている伸長位置と、直線アクチュエータハウジングにより近い非伸長位置との間を軸方向に移動する直線アクチュエータ部材285Aを備える。機械的連結機構287がそのアクチュエータをスプライン軸281に連結する。したがって、直線アクチュエータがその伸長位置と非伸長位置との間を約12mm移動する時に、スプライン軸が約30度の角度範囲にわたって回転する。スプライン軸は、ラック−係合足部材290Aを有するプレート290をスライド自在に支持する。プレート290は、スプライン軸を受け取ってこのスプライン軸にスライド自在に係合するように形作られている中央穴(図示していない)を備えている。プレート290はスプライン軸のトラック(truck)291とナット291Aとの間に締め付け固定されており、このスプライン軸のトラックとナットは、両方ともスプライン軸によってスライド自在に支持されておりかつスプライン軸と共に回転するようになっている。したがって、スプライン軸が直線アクチュエータの引っ込み移動によって回転させられる時に、プレート290はスプライン軸と共に回転し、および、そうする時に、足部分290Aがモジュールの後部に向かってY方向に移動するだろう。検体容器ラックRが図23に示されているように位置している場合には足。プレート290の部材290Aがラック−ポケット165A、165Bのどちらか一方の中に入るだろう。足290Aの幅がラック−ポケットの幅よりも著しく小さいので、その足をそのポケットの中に入れることは実際には比較的容易な作業である。ラック−ポケットの中に入る時には、足部分は、ポケットの側壁に駆動的に係合し、かつ、これによって検体−搬送モジュールの経路Fに沿ってラックを前進させる準備が整っている。直線アクチュエータ部材がその伸長位置に移動する時には、スプライン軸が反対方向(反時計回り方向)に回転し、これによって、足部材290Aがラック−ポケットの外に出て、スプライン軸トラックがスプライン軸に沿って障害なしに移動することを可能にする位置にその足部材290Aが移動することを引き起こす。
【0045】
経路Fに沿ってラックを前進させるために、プレート290は、ベルト駆動システム295によってスプライン軸に沿ってスライド駆動される。このベルト駆動システムは、モジュール側壁76上に取り付けられている双方向ステップモータM8を備える。モータM8はシステムコントローラ20によって制御され、および、駆動プーリ298とアイドラプーリ299との周りに匍わせられているエンドレスベルト297を選択的に前進させる働きをする。この駆動プーリはステップモータの駆動軸上に取り付けられており、および、アイドラプーリ299は、軸支持プレート283上に取り付けられているベルトテンショナハウジング300の基部によって支持されている固定された軸の上に回転するように取り付けられている。図示しているように、ベルト297は、そのモジュールの経路Fに対して平行なX方向に延びる。プレート290は連結機構296を経由して駆動ベルトに機械的に連結されている。
【0046】
動作時には、冗長駆動機構280は、図23に示されている位置、すなわち、図6に示されている経路Fに沿って、互いに隣接する検体−搬送モジュールの互いに反対側に位置する移送ステーション(例えば、図6のステーション52、54)にラックRが跨る位置から、検体−搬送モジュールの反対側の同様の「跨り(spanning)」位置に、ラックを機械的に前進させることによって、モジュールをバイパスするために使用されることが可能である。この第2の位置に到達し終わると、そのように搬送されたラックは、隣接するモジュールのX/Y駆動機構または冗長駆動機構による作用を受けるだろう。経路Fに沿ってラックを前進させる時に、プレート290の足部分290Aは、上述した仕方で一方のラックポケット(より内側のポケット)の中に入る。ベルト297がX方向に駆動される時に、プレート290はスプライン軸281に沿ってスライド自在に駆動され、および、足部分290Aの横表面がラックポケットの端壁上に駆動力を及ぼして、表面Sに沿ってラックが引っ張られかつ経路Fに沿って移動することを引き起こすだろう。プレート290がそのモジュールの反対側のその移動の終端に達すると、検体−容器ラックは、ラックの前縁だけがそのモジュールの端縁に到達し終わっているように位置させられるだろう。この時点において、スプライン軸は、ラックとの係合から足部材290Aを取り外すように反対方向に回転させられるだろう。ベルト駆動装置295は、逆の方向に、ラックの後縁の背後にプレート290を位置させる働きをするだろう。その次に、スプライン軸は、足部材を再び完全に伸長させるために再び反対方向に回転し、および、ベルト駆動装置は、スプライン軸に沿って前方にプレートを駆動するために逆転させられるだろう。そうする時に、伸長された足部分はラックの後部端縁に駆動的に係合し、および、これによって、この時点ではモジュールの反対側において、図6と図23とに示されているモジュール−跨り位置にラックが前進し終わるまでそのラックを押す働きをするだろう。その次に、ラックは、隣接するモジュールによって上述の仕方でさらに前進させられるべき位置にある。前述した仕方で多機器作業セルのモジュールをバイパスすることが可能であることが、機器の搬送モジュールの1つがそのラック−搬送システムのどちらか一方の故障を被る時にさえ、作業セルの機器が連結された状態のままであることを可能にする。このラック駆動装置の冗長性が作業セルの全体的な可用性を増大させ、および、オペレータの介入のレベルを減少させる。
【0047】
本発明を特定の好ましい実施形態を参照して説明してきた。明らかであるが、本発明の着想から逸脱することなしに変型例が生じさせられることが可能であり、および、添付されている特許請求項の範囲内にこうした変型例が含まれることが意図されている。
【特許請求の範囲】
【請求項1】
検体−容器によって保持されている検体を処理するためのモジュール型機器システムであって、
(a)検体−容器から抜き出された検体の少なくとも一部分を処理するための検体−処理構成要素であって、この検体−処理構成要素に作動的に関連付けられている検体−抜き出しステーションを含む検体−処理構成要素と、
(b)(i)前記検体−抜き出しステーションへ、および、前記検体−抜き出しステーションから、および、(ii)(1)容器がこの容器−搬送構成要素から遠ざかるように移送されるように位置させられており、および、(2)容器が、この容器−搬送構成要素による搬送のためにこの容器−搬送構成要素によって受け取られる、1対の互いに間隔を置いた容器−移送場所の各々に、および、これらの容器−移送場所の各々から、検体−容器を搬送するように構成されている容器−搬送構成要素とを備えるモジュール型機器システム。
【請求項2】
前記容器−搬送構成要素は、(a)(i)前記検体−抜き出しステーションに、および、前記検体−抜き出しステーションから、および、(ii)前記対の容器−移送場所のどちらかに、および、前記対の容器−移送場所のどちらかから、検体−容器を搬送するための1次搬送システムと、(b)前記対の容器−移送場所の間で検体−容器を搬送するための、前記1次搬送システムから独立している、2次搬送システムとを備える請求項1に記載のモジュール型機器システム。
【請求項3】
前記容器−搬送構成要素は、前記容器−搬送構成要素による搬送中に容器を支持する容器−支持表面を含み、および、前記容器−搬送構成要素は、(i)各々の容器−移送場所において前記容器−支持表面を少なくとも部分的に越えて延びるように検体−容器を位置させるように、および、(ii)各々の検体−移送場所において前記容器−支持表面上に部分的にだけすでに位置させられている検体−容器を受け取るように構成されている請求項1に記載のモジュール型機器システム。
【請求項4】
前記容器−移送場所における検体−容器の位置決めを信号伝送するために各々の容器−移送場所に配置されているセンサをさらに備える請求項1に記載のモジュール型機器システム。
【請求項5】
前記容器−搬送構成要素は、(i)複数の検体容器を受け取って格納するように、および、(ii)前記容器−搬送構成要素による取り除きと搬送とのための位置に各々の受け取られた検体−容器を前進させるように構成されている投入バッファを備える請求項1に記載のモジュール型機器システム。
【請求項6】
前記容器−搬送構成要素は、(i)複数の検体−容器を受け取って格納するように、および、(ii)取り外しのための前記排出バッファ内の位置に各々の受け取られた検体容器を前進させるように構成されている排出バッファを備える請求項1に記載のモジュール型機器システム。
【請求項7】
前記容器−搬送構成要素は、(i)複数の検体−容器を受け取って格納するように、および、(ii)取り外しのための前記排出バッファ内の位置に各々の受け取られた検体容器を前進させるように構成されている排出バッファを備える請求項5に記載のモジュール型機器システム。
【請求項8】
前記容器−搬送構成要素は、各々の移送場所において少なくとも部分的に前記検体−容器搬送構成要素を越えて延びるように検体−容器を位置させることによって、各々の移送場所において前記容器−搬送構成要素から検体−容器を移送するように、および、各々の容器−移送場所において前記容器−搬送構成要素の少なくとも外側にある検体−容器を受け取って搬送することによって、各々の容器−移送場所において前記機器システムの外側から検体−容器を受け取るように、構成されている請求項7に記載の機器システム。
【請求項9】
前記容器−搬送構成要素は、(a)(i)前記検体−抜き出しステーションに、および、前記検体−抜き出しステーションから、および、(ii)前記対の容器−移送場所のどちらかに、および、前記対の容器−移送場所のどちらかから、検体−容器を搬送するための1次搬送システムと、(b)前記対の容器−移送場所の相互間で検体−容器を搬送するための、前記第1の搬送システムから独立している、2次搬送システムとを備える請求項8に記載のモジュール型機器システム。
【請求項10】
本願明細書に記載された発明。
【請求項1】
検体−容器によって保持されている検体を処理するためのモジュール型機器システムであって、
(a)検体−容器から抜き出された検体の少なくとも一部分を処理するための検体−処理構成要素であって、この検体−処理構成要素に作動的に関連付けられている検体−抜き出しステーションを含む検体−処理構成要素と、
(b)(i)前記検体−抜き出しステーションへ、および、前記検体−抜き出しステーションから、および、(ii)(1)容器がこの容器−搬送構成要素から遠ざかるように移送されるように位置させられており、および、(2)容器が、この容器−搬送構成要素による搬送のためにこの容器−搬送構成要素によって受け取られる、1対の互いに間隔を置いた容器−移送場所の各々に、および、これらの容器−移送場所の各々から、検体−容器を搬送するように構成されている容器−搬送構成要素とを備えるモジュール型機器システム。
【請求項2】
前記容器−搬送構成要素は、(a)(i)前記検体−抜き出しステーションに、および、前記検体−抜き出しステーションから、および、(ii)前記対の容器−移送場所のどちらかに、および、前記対の容器−移送場所のどちらかから、検体−容器を搬送するための1次搬送システムと、(b)前記対の容器−移送場所の間で検体−容器を搬送するための、前記1次搬送システムから独立している、2次搬送システムとを備える請求項1に記載のモジュール型機器システム。
【請求項3】
前記容器−搬送構成要素は、前記容器−搬送構成要素による搬送中に容器を支持する容器−支持表面を含み、および、前記容器−搬送構成要素は、(i)各々の容器−移送場所において前記容器−支持表面を少なくとも部分的に越えて延びるように検体−容器を位置させるように、および、(ii)各々の検体−移送場所において前記容器−支持表面上に部分的にだけすでに位置させられている検体−容器を受け取るように構成されている請求項1に記載のモジュール型機器システム。
【請求項4】
前記容器−移送場所における検体−容器の位置決めを信号伝送するために各々の容器−移送場所に配置されているセンサをさらに備える請求項1に記載のモジュール型機器システム。
【請求項5】
前記容器−搬送構成要素は、(i)複数の検体容器を受け取って格納するように、および、(ii)前記容器−搬送構成要素による取り除きと搬送とのための位置に各々の受け取られた検体−容器を前進させるように構成されている投入バッファを備える請求項1に記載のモジュール型機器システム。
【請求項6】
前記容器−搬送構成要素は、(i)複数の検体−容器を受け取って格納するように、および、(ii)取り外しのための前記排出バッファ内の位置に各々の受け取られた検体容器を前進させるように構成されている排出バッファを備える請求項1に記載のモジュール型機器システム。
【請求項7】
前記容器−搬送構成要素は、(i)複数の検体−容器を受け取って格納するように、および、(ii)取り外しのための前記排出バッファ内の位置に各々の受け取られた検体容器を前進させるように構成されている排出バッファを備える請求項5に記載のモジュール型機器システム。
【請求項8】
前記容器−搬送構成要素は、各々の移送場所において少なくとも部分的に前記検体−容器搬送構成要素を越えて延びるように検体−容器を位置させることによって、各々の移送場所において前記容器−搬送構成要素から検体−容器を移送するように、および、各々の容器−移送場所において前記容器−搬送構成要素の少なくとも外側にある検体−容器を受け取って搬送することによって、各々の容器−移送場所において前記機器システムの外側から検体−容器を受け取るように、構成されている請求項7に記載の機器システム。
【請求項9】
前記容器−搬送構成要素は、(a)(i)前記検体−抜き出しステーションに、および、前記検体−抜き出しステーションから、および、(ii)前記対の容器−移送場所のどちらかに、および、前記対の容器−移送場所のどちらかから、検体−容器を搬送するための1次搬送システムと、(b)前記対の容器−移送場所の相互間で検体−容器を搬送するための、前記第1の搬送システムから独立している、2次搬送システムとを備える請求項8に記載のモジュール型機器システム。
【請求項10】
本願明細書に記載された発明。
【図1】


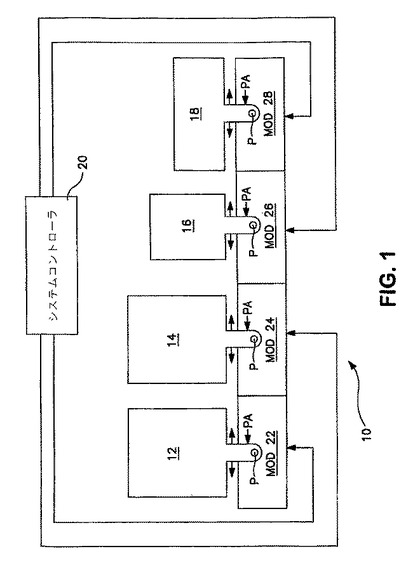
【図2】
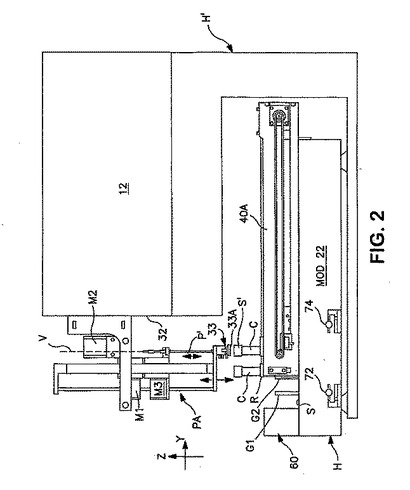
【図3】
【図4】
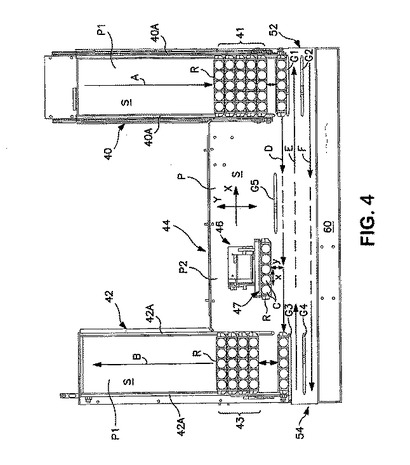
【図5】
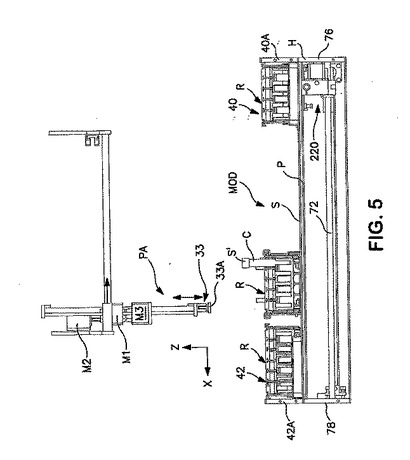
【図6】
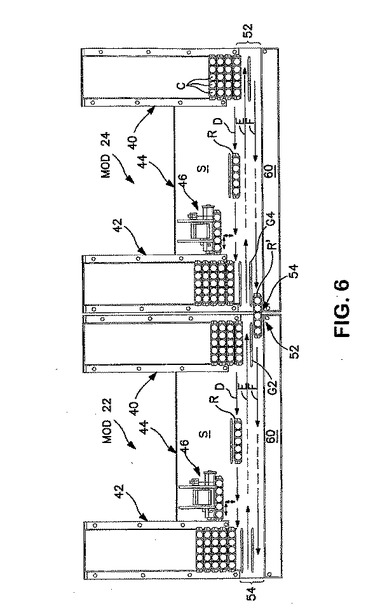
【図7】
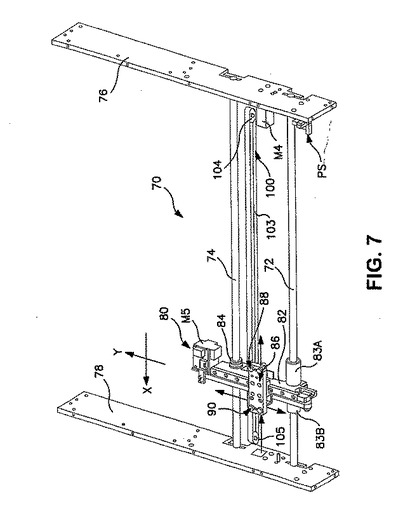
【図8A】
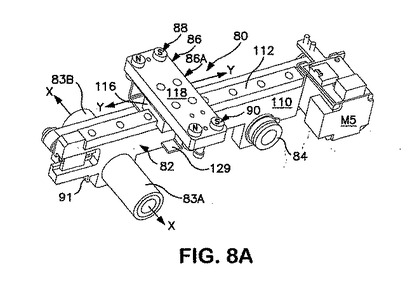
【図8B】
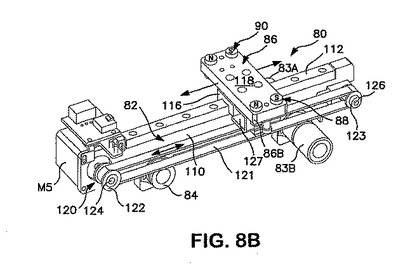
【図9】
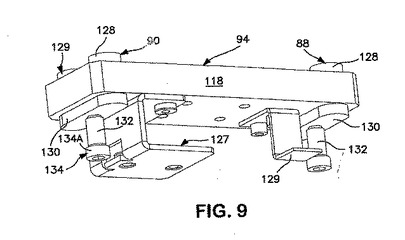
【図10】
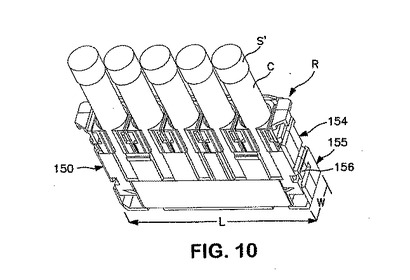
【図11A】
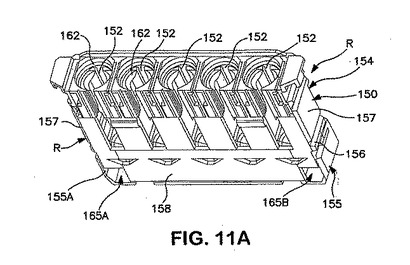
【図11B】
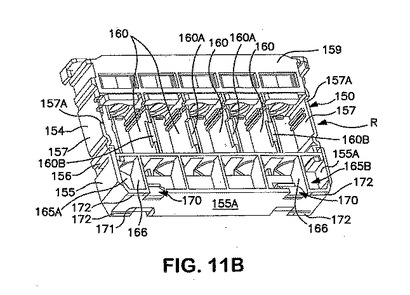
【図12】
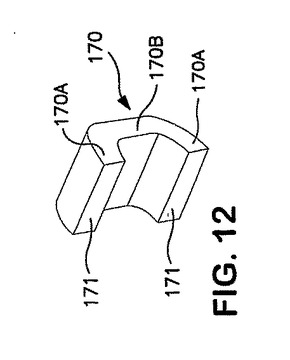
【図13】
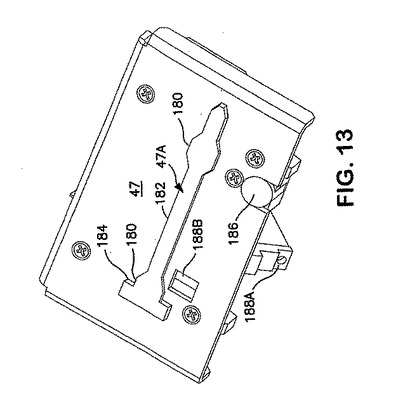
【図14】
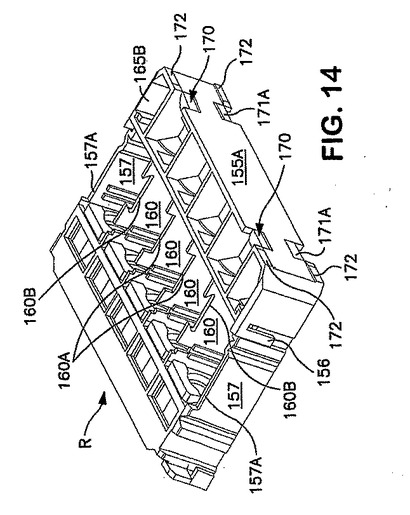
【図15A】
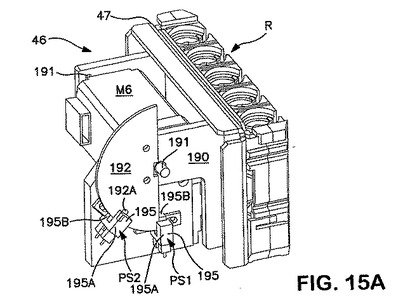
【図15B】
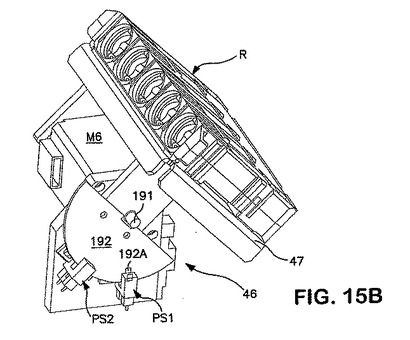
【図16A】
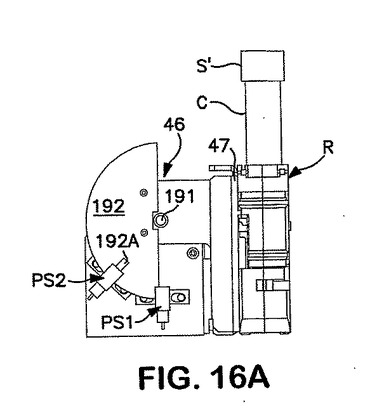
【図16B】
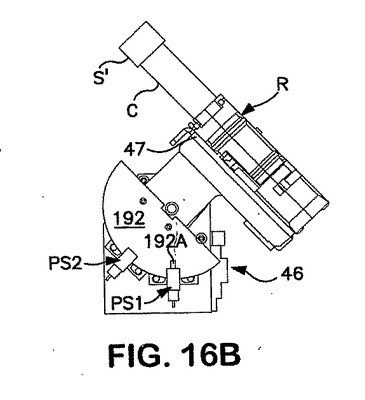
【図16C】
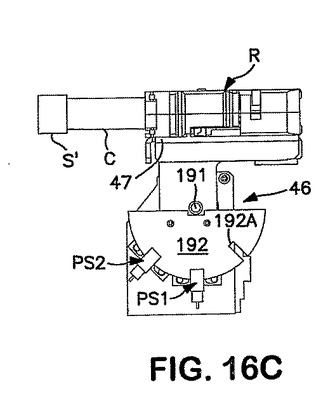
【図16D】
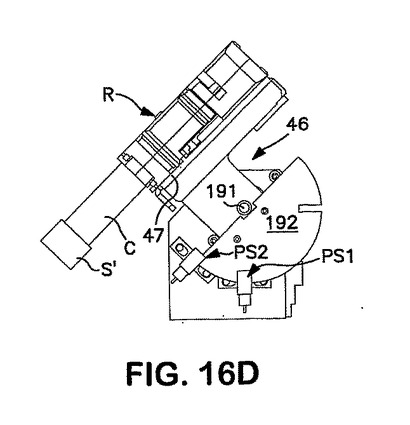
【図17A】
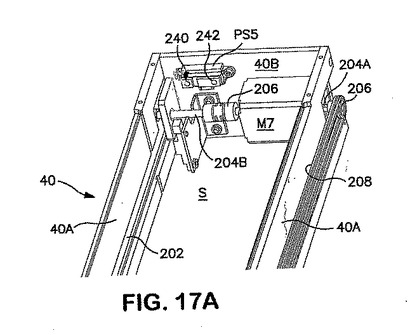
【図17B】
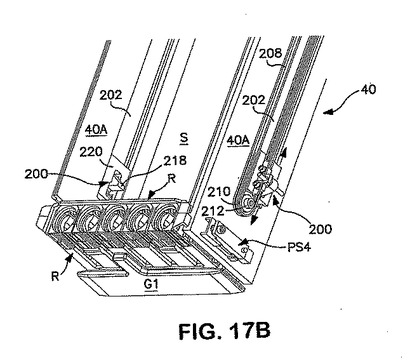
【図18A】
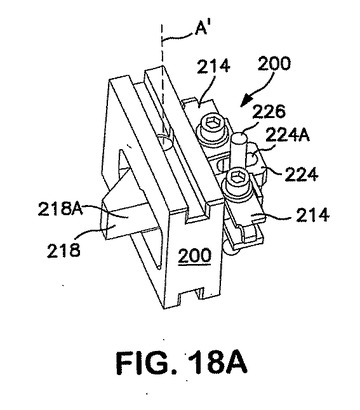
【図18B】
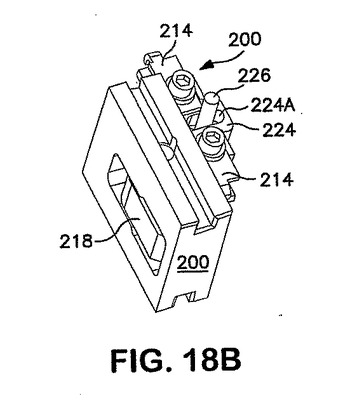
【図19A】
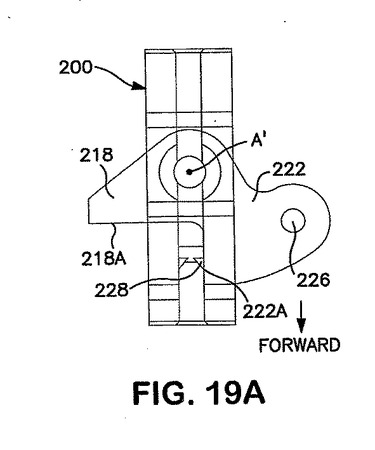
【図19B】
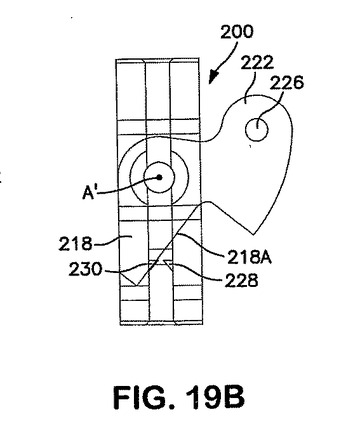
【図20A】
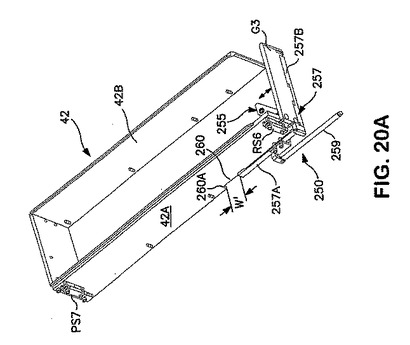
【図20B】
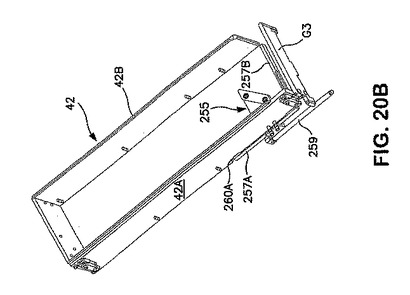
【図21】
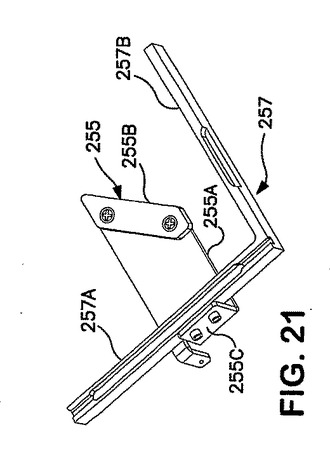
【図22】
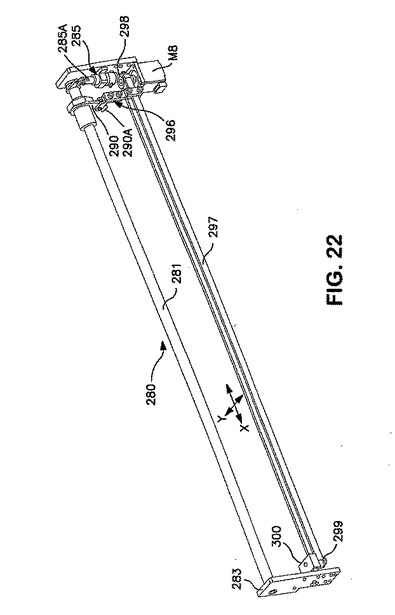
【図23】
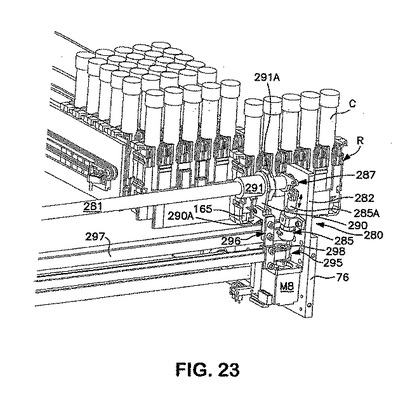
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8A】
【図8B】
【図9】
【図10】
【図11A】
【図11B】
【図12】
【図13】
【図14】
【図15A】
【図15B】
【図16A】
【図16B】
【図16C】
【図16D】
【図17A】
【図17B】
【図18A】
【図18B】
【図19A】
【図19B】
【図20A】
【図20B】
【図21】
【図22】
【図23】
【公開番号】特開2012−132941(P2012−132941A)
【公開日】平成24年7月12日(2012.7.12)
【国際特許分類】
【出願番号】特願2012−89572(P2012−89572)
【出願日】平成24年4月10日(2012.4.10)
【分割の表示】特願2010−144121(P2010−144121)の分割
【原出願日】平成17年2月18日(2005.2.18)
【出願人】(510005889)ベックマン コールター, インコーポレイテッド (174)
【Fターム(参考)】
【公開日】平成24年7月12日(2012.7.12)
【国際特許分類】
【出願日】平成24年4月10日(2012.4.10)
【分割の表示】特願2010−144121(P2010−144121)の分割
【原出願日】平成17年2月18日(2005.2.18)
【出願人】(510005889)ベックマン コールター, インコーポレイテッド (174)
【Fターム(参考)】
[ Back to top ]