
多次元イメージ化の方法および装置
【課題】空間における反射点で反射された信号を検知することによって、これらの位置を定めるために、電磁気信号の送信を用いる方法およびシステムを提供すること。
【解決手段】本発明は、マイクロ波を用いて、反射点の位置を定めるための方法、アンテナおよびシステムである。電磁波信号が、決められた周波数で生成されて、アンテナユニットにより送信される。アンテナユニットは、送信アンテナと、主視線の方向と垂直な方向に既知の間隔に分離されており、送信された波の反射された一部を受信するように工夫されている多数の受信アンテナとを含んでいる。位相比較手段が送信アンテナおよび受信アンテナに接続されており、該位相比較手段と接続されている制御ユニットは、反射点への角度を計算すること、および該反射点への距離を計算する動作が可能である。
【解決手段】本発明は、マイクロ波を用いて、反射点の位置を定めるための方法、アンテナおよびシステムである。電磁波信号が、決められた周波数で生成されて、アンテナユニットにより送信される。アンテナユニットは、送信アンテナと、主視線の方向と垂直な方向に既知の間隔に分離されており、送信された波の反射された一部を受信するように工夫されている多数の受信アンテナとを含んでいる。位相比較手段が送信アンテナおよび受信アンテナに接続されており、該位相比較手段と接続されている制御ユニットは、反射点への角度を計算すること、および該反射点への距離を計算する動作が可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、コヒーレントな電磁気放射を用いて、反射点の空間における位置を定めるための解決法に関する。特に、本発明は、レーダアンテナのアレイを用いて、対象物および表面の3次元イメージデータを得るための装置および方法に関する。
【背景技術】
【0002】
様々な用途において、ある要素の空間における位置の測定を行いたいという必要がある。本明細書において、位置は、1次元、2次元または3次元における相対位置を意味する。これは、参照位置に対して離れた要素の位置を定めること、または、表面もしくは物体全体のイメージ表示を取得することが含まれる。
【0003】
位置を決める一つの方法は、Radio Detection And Rangingというレーダを用いることである。レーダという言葉は、対象物、典型的には離れた対象物、を探知するために短い波長の電磁波を用いて、それらの位置および動きを測定する方法を意味すると理解される。レーダは、アンテナを備えた送信器、反射するターゲット、送信器のアンテナと同じでも良い、アンテナを備えた受信器、およびアンテナとターゲットとの間の伝送路を含む。レーダシステムは、もともとは軍事目的のために開発されたが、今日では多くの民生用および産業用の用途にも同様に用いられている。レーダの一般的な概念の中には、異なる特徴を備えた様々な方法および装置、および一般に技術上1−100GHzの間のマイクロ波の領域で操作されるレーダアプリケーションがある。レーダが位置決めの目的のために用いられる場合、用いられる様々なタイプのレーダ技術には、パルスレーダ、FMCWレーダおよびインターフェロメータレーダが含まれる。パルスレーダは、短い持続期間の電磁気パルスを送信する。該パルスは、搬送波が変調されていてもされていなくても良い。ターゲットまでの距離は、送信と受信との間の経過時間から計算される。周波数変調連続波であるFMCWレーダにおいて、信号は連続的に存在するが周波数は変調され、通常は継続する直線状の傾斜の状態に変調される。これは、現在送信される波と、周波数の傾斜上の時間上の別な点で送信されたところの、同時に受信される波との間の周波数の差を計算することにより、kHzオーダの小さな周波数差の信号が得られる、ということを意味する。その信号の周波数は、ターゲットまでの距離に比例する。インターフェロメータレーダは、ある時間の間一定周波数の信号を送信して、送信した該信号を、ターゲットにおける反射後受信された信号と比較することにより機能する。送信および受信された信号を、混合信号を得るために、インターフェロメータにおいて重ね合わせることにより、両信号間の相対位相が推定される。得られる精度はかなり高いが、その結果は、信号の波長の半分の周期を有する。
【0004】
ターゲットまでの距離を測定するための多くの様々な解決法が、上述した技術の基本原理に基づいて、提案されて来た。対象物までの距離を測定する場合、ホーンアンテナまたはパラボラアンテナのような、指向性アンテナが、送信および受信両方のために一般に用いられる。そのような装置が、液体媒体の非接触レベル測定のためのように、広く様々な産業用途に用いられており、主に1次元の距離の測定をする。しかしながら、多くの目的に対して、1次元の距離測定は十分ではない。
【0005】
表面全体に亘るレーダ探知のための一つの既知の解決法は、長いアンテナをシミュレートするために動くプラットフォームを用いる、合成開口レーダSARである。飛行機または人工衛星が、該プラットフォームになり得る。パルスが搭載されたレーダから放射されて、反射した信号が、その後プラットフォームがターゲットエリア上を飛行している間に受信される。従って、同じ受信器が、飛行経路に沿った異なる場所で、信号を受信するために用いられる。このように、パルス長に亘る飛行経路と同じ長さを備えた長いアンテナを合成することができる。SARは、主に地球資源の観測およびマッピング、または軍事使用のために使われている。非特許文献1は、2ーDInverseSAR(ISAR)イメージングを3Dへ変更するための方法を開示している。この非特許文献1は、2ーDISARイメージが、ターゲット上の各散乱中心の相対高度の情報を提供できないという欠点を、異なる高度でのアンテナにより測定された2つの2Dイメージを合成することにより克服することを提案している。
【0006】
2ーDイメージングに対する他の既知の解決法には、フェーズド・アレイ・レーダがある。フェーズド・アレイ・レーダは、大きなアンテナを合成するために、普通は小さなラジオホーンまたはパッチ要素である多数のアンテナを用いる。アンテナ要素は、アレイの直径のビーム寸法を有するシングルビームを形成するために、組み込まれたシステムコンピュータで位相が調整される。ビームは、要素ベースの位相オフセットを設けることにより、空に位置づけられる。その後、パルスがビームを通って放射されて、高い角度分解能で、同じビームを通って受信される。それゆえ、空のレーダスポットは、簡単に変えることができて、空が、探知を避けるために小さなビームで効率的に走査されることができる。フェーズド・アレイ・レーダは、小さなビームで走査して、通常、小さな角度のビームを有し且つ可動部を用いることなくターゲットを追跡できるので、軍事目的のために開発される。
【0007】
2ーDイメージングのためのまた他の解決法が、非特許文献2に提案されている。この非特許文献2において、イメージングインタフェロメータは、各検出器が入射するTHz放射の振幅および位相を測定する、個々の検出器のアレイから構成されることが提案されている。個々の検出器のすべての異なる対の組み合わせの空間フーリエ成分から、イメージが生成される。
【0008】
【非特許文献1】Xiaojian Xu et.al、”Three−Dimensional Interferometric ISAR Imaging for Scattering Diagnosis and Modelling”、IEEE Transactions on Image Processing、Vol.10,No.7,July2001
【非特許文献2】John F.Federici et.al,”Terahertz Imaging Using an Interferometric Array”,Applied Physics Letters,Vol.83,No.12,22September2003
【発明の開示】
【0009】
本発明の全体の目的は、空間における位置での反射点で反射された信号を検知することによって、これらの位置を定めるために、電磁気信号の送信を用いる方法およびシステムを提供することである。特に、3次元における反射点の位置を定めることができることが目的である。
【0010】
本発明の第1の形態によれば、この目的は、添付の請求項に従う方法を実行するために工夫された機器およびアンテナユニットと同様に、添付の請求項に従う方法により実現される。特に、本発明は、反射点の位置の測定、および位置決めされた反射点に基づいて、表面と体積を有する対象物の3次元表示の生成に対する解決方法を提供する。本発明は、広い角度の送信ビームおよび受信視野を有するアンテナ設計を好ましく用いており、このようにして、表面領域または対象物の全体が、同時にさらされて、位置決めされるかもしれない。様々な好ましい実施形態および応用分野が、従属請求項に提示されている。
【0011】
本発明の好ましい実施形態が、添付の図面を参照して詳述される。
【発明を実施するための最良の形態】
【0012】
本発明は、電磁気信号の送信および反射点においてその位置で反射された信号の検知によって、空間における位置を定めるための新規な方法、および装置またはシステムに関する。
【0013】
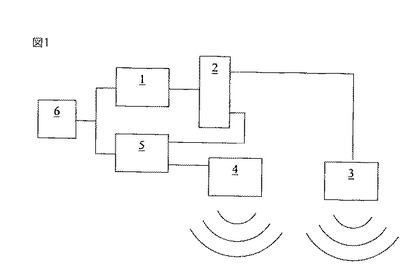
図1には、本発明の実施形態で用いる装置の模式的表示が示されている。信号が、信号ジェネレータ1を用いて、決められた周波数で生成される。この信号は、ケーブルを経由して、パワースプリッタ2へ運ばれる。パワースプリッタ2は、1つのパスがケーブルを経由して送信アンテナ3へ伝わっている。2つ目のパスは、ケーブルを経由して、参照信号として用いられる位相比較ユニット5へ伝わっている。送信アンテナ3は、信号ジェネレータ1により生成された電磁気信号を、つまり送信器は例えば円偏波のラジオ波の形において、一つのまたは多数の反射点(図1には図示せず)に向かって、送信するように、工夫されている。送信された信号がターゲットの1つのまたは多数の反射点に衝突すると、それは、少なくとも部分的に反射して、反射した信号は、増幅器を備えた受信アンテナ4、つまり受信器、により受信される。円偏波した波に対して、反射した波は、奇数の反射のために、反対の円偏波状態で受信される。受信した信号は、ケーブルを通って位相比較ユニット5へ送られて、そこで、時間参照信号の共役と複素乗算される。複素共役乗算の位相が、および可能であれば振幅も、コンピュータ6によりテーブルに格納されて、信号ジェネレータが、周波数を変えて、新しい測定が始まる。この手続きは、ある周波数帯に亘って、ある数の周波数チャンネルが、別々に測定されるまで続く。装置は、コンピュータ、例えばコンピュータ6、を含む制御ユニットにより制御される。コンピュータは、またデータを格納したり、信号解析を行う。
【0014】
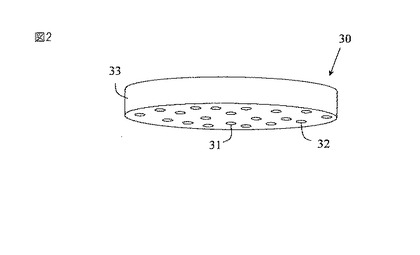
図2は、インターフェロメータとも呼ばれるアンテナユニット30の実施形態を模式的に示す。本発明によれば、アンテナユニット30は、また図1のアンテナ3に対応する送信アンテナ31と、図1のアンテナ4に対応する多数の受信アンテナまたは検知器32とを備えている。送信アンテナ31は、受信アンテナ32とは分離していても良いが、受信アンテナ32の内の1つが、また送信アンテナ31として動作することが好ましい。図2は、20個のアンテナ要素を備えた実施形態を示しており、20個の受信アンテナ32として作動するように工夫されていて、その内の1つがまた送信アンテナ31として作動するように工夫されている。これは、単に、アンテナ要素の可能な数の無限な数の1つである。32個のアンテナ要素を用いたテストが、首尾よく行われている。アンテナ要素は、少なくとも1次元の状態で間隔が空けられており、好ましくは図2に示すように平面内において、適切に支持部材33上に取り付けられて、該支持部材33により支えられることが好ましい。その面、つまり図2に示すように下側表面の面、の法線方向は、アンテナユニット30に対する主視線を決定する。アンテナは、その上に導電性材料のパッチがエッチング処理されている、誘電性材料から形成された平らな膜であっても良い。導電性のパッチは、適切な波長に対するアンテナ要素を構成するように個々に形成されている。マイクロ波領域のアンテナに対するビームは、およそλ/dのハーフ・パワー・ビーム幅を備えた回折限界がある。ここで、λはマイクロ波の波長であり、dはアンテナの物理的直径である。アンテナ要素の寸法は、個々のアンテナビームが、例えば120度という、測定されるべき十分な体積をカバーしているように選ばれる。
【0015】
アンテナ要素31,32は、各アンテナ要素が、ターゲットの大きな表面領域を照射する、またはターゲットの大きな表面領域からの放射を検知するように、大きなビーム幅または視野を有するように構成される。このように、アンテナユニット30は、固定された周波数のコヒーレントな電磁波に、位置づけられる全体の場または対象物がさらされて、且つ同時に全体の場または対象物から反射された信号を受信することに対して用いられるように工夫されている。
【0016】
図3は、どのようにアンテナユニット30が、座標系を定めるかを模式的に示している。この座標系では、反射点の位置Pは、Pがアンテナユニット30の選択された中心に対して座標P(r、φ、θ)を有する極座標系で判断されることができる。しかしながら、主視線は、アンテナユニット30のアンテナ要素31,32が配置されている平面の法線方向であるZにより表されている。
【0017】
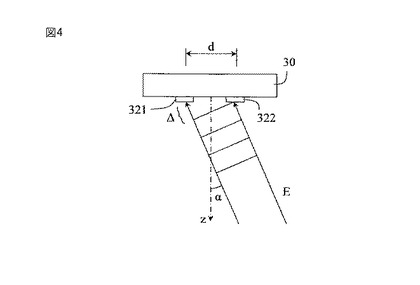
図4は、図3の3次元系のアンテナ30を通る平面における射影を示す簡単な図面であり、本発明の位置決め方法がどのように働くのかを理解するための基本的な例として役立つ。図4は、Pから反射されて戻ってきた電磁波Eの前方が、どのようにアンテナユニット30で受信されるのかを模式的に示す。射影において、2つの受信アンテナ321、322が、主視線の方向zと垂直な方向に、間隔dを空けている。更に、示された射影において、Pから反射されて戻ってきた電磁波は、主視線に対して角度αで受信される。受信されたコヒーレントな電磁波Eの終点が図面に表されており、この終点から、受信アンテナ321および受信アンテナ322における時間の位置において、検知される信号の位相差があることが明らかである。送信されて、その後受信される電磁波Eの周波数が既知なので、電磁波の前方Eの波長も既知である。2つの受信アンテナ321,322において検知される信号を一緒に解析することにより、検知された位相差を表す距離Δを計算することができる。この計算されたΔおよび既知の間隔dを用いて、角度αの測定が、α=arcsin(Δ/d)のように計算することができる。云うまでもないが、計算された値Δは、電磁波Eの半分の波長の周期を備えて周期的であるので、理論上は、多くの異なる入射角が同じ検知される位相差を生成する。しかしながら、電磁波の周波数が例えば1GHzであって、間隔dが数センチメートルのオーダであれば、ただ1つの角度が導出可能、つまりΔ/d<1である。更に、例えより高い周波数およびより大きな間隔dが用いられたとしても、2つ以上の受信アンテナを用いることおよびそのようなアンテナの複数の対からの信号を結合することにより、正しい角度αが固定される。例えば1,2,3という3つのアンテナが用いられた場合、正しい角度αは、1プラス2、2プラス3、および1プラス3というアンテナ対になされた角度計算と一致する。与えられた受信アンテナ数Nに対して、N(N−1)/2の可能な対の組み合わせがある。アンテナユニット30の面において、少なくとも2つの平行でない方向において、これらの計算を実行することにより、位置Pがアンテナユニット30に対して2次元内に定められる。
【0018】
ターゲットPへの距離rを測定するために、周波数ステッピング機能が用いられる。ある波信号の他の波信号に対する時間遅延は、フーリエまたは周波数空間において、周波数に対して位相の直線的なシフトである。もし、波が反射点Pに向けて送信されて、反射された場合、送信波と受信波との相対的な位相は、周波数に対して直線的に変化する。本発明に従って、この効果は、ターゲットPへの距離の射程測定を確立するために用いられる。ターゲットに対する角度の測定を確立するために、受信される反射波の前方の検知の間、上述したように、コヒーレント波に対して固定した周波数が維持される。しかしながら、更に送信された信号の周波数をステップ状に変化させ、且つ送信波と受信波との間の位相差の測定を、固定された周波数が維持されている各ステップにおいて行うことにより、送信波の周波数の関数としての位相差のプロットは、反射波の伝播遅延Δtに対応する傾斜を有する直線となる。好ましくは、周波数は、周波数帯の中で多数のステップに変化させられる。その後、線形化関数が、アンテナユニット30とターゲットの反射点Pとの間の光学的距離を表す、伝播遅延Δtの計算値を確定するために用いられる。周波数帯は、表面での反射および物質中を通る送信に対して最適化されるように選ばれる。そのような周波数帯は、スラグおよび鋼の用途に対しては10−12GHzであり、砂の表面上での反射に対しては60−70GHzである。周波数のステップの数は、不明確な距離、つまり用いられるサンプリングで測定可能な最大距離、により決められる。周波数のバンド幅の幅は、要求される不明確な距離およびサンプリングに対して1/バンド幅である、最大解像度が得られるように選ばれる。従って、実際の幾何学的距離rもまた、アンテナユニット30とターゲットPとの間に存在する媒体、既知または見積もられて、典型的には空気、の屈折率が与えられて、計算されることができる。
【0019】
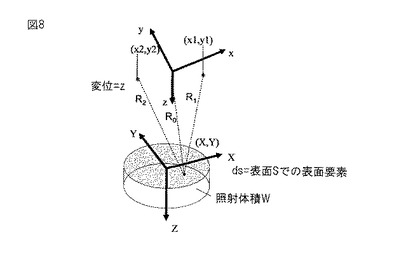
本発明に従った3次元における位置を定める発明の理論背景が、図8を参照して、今より詳細に述べられる。図8は、図3と同じシナリオを基本的に示すが、体積Wを見下ろすラジオインターフェロメータのアンテナの配置に対して直角座標系で示している。x、y、zは、インターフェロメータのアンテナ要素が取り付けられているアンテナ上の位置の直角座標を表している。X,Y,Zは体積Wの直角座標系を表す。τ=z/cは、ここでcは空気中の光速であり、アンテナから体積Wの上側の参照表面への線形遅延である。Δτ=2Z/Vは、ここでVは体積Wの中での光速であり、体積Wの中への深さ測定に対する追加遅延である。x、y、z座標系の原点は、インターフェロメータの位相中心として定義されており、一方X,Y,Z座標系の原点は、体積Wの中の参照点として定義される。
【0020】
座標ベクトルzおよびZが平行となり且つ同じ軸に沿うように、送信器が、インターフェロメータの位相中心に置かれており、平面波を体積Wの中の参照点に直接向けて送信する。z軸に沿った座標系間の距離は、Rとして定義される。照射される体積は、参照位置Sを備えたWである。
【0021】
インターフェロメータの2つの受信要素が、インターフェロメータ面上の位置x1、y1とx2、y2に位置している。まず、体積Wの参照表面のトップである位置X,Yに、表面要素dsを考える。周波数νkのラジオ波が、ここでkは周波数インデックスであり、参照点からX,Yへ、参照時刻tに送信される。このラジオ波は、受信要素x1、y1へ距離R0+R1進み、受信要素x2、y2へ距離R0+R2進む。従って、このラジオ波は、式(1)および(2)に表される量だけ遅延される。
【0022】
【数1】

【0023】
X,Y平面におけるSの各要素dsは、インターフェロメータ面上において、x1、y1に電場E1(s、t)を、x2、y2に電場E2(s、t)を形成する。各受信器での全電場は、式(3)および(4)に示すように、照射体積Wの表面Sのすべての要素全体に亘る積分となる。
【0024】
【数2】
【0025】
空間コヒーレント相関関数は、以下の式(5)に示すように、書くことができる。
【0026】
【数3】
【0027】
以下において、異なる領域からの反射は、統計的に独立、つまり反射した信号は空間的にインコヒーレントであると仮定する。コヒーレント領域は、体積イメージにおいてスペックルを形成し、個々に処理されることができる。送信源の異なる部分からの反射により生じた被積分関数における項の外積は、キャンセルし、表面要素dsから送信された電場のみを考慮する必要がある。要素dsからある距離での複素振幅は、距離に逆比例しており、式(6)に示すように、書くことができる。
【0028】
【数4】
【0029】
検討下にあるすべての体積が同じ照射を有していると仮定すると、SのX,Yでの要素dsからコヒーレント相関関数を、式(7)に示すように、書くことができる。
【0030】
【数5】
【0031】
もし、x1、y1およびx2、y2への波の到着時刻の差(τ2−τ1)が、個々の周波数チャンネルのバンド幅の逆数(Δν)−1と比べて小さいならば、つまり系の時間積分周期の中で、式(7)の右辺における角括弧の中のこの項を無視することができる。従って、式(8)のように書ける。
【0032】
【数6】
【0033】
または、直角座標においては、式(9)のように書ける。
【0034】
【数7】
【0035】
<P(t)P*(t)>という量は、送信器からの平面波が体積Wの参照表面に衝突した時刻を参照して、体積Wの中の表面Z(=0)でのピクセルdsの時間平均強度(明るさ)B(X,Y,Z)の尺度である。体積Wの表面全体に亘る積分は、点x1、y1およびx2、y2での電場の周波数チャンネルνkでのコヒーレント相関関数を、式(10)に示すように、与える。
【0036】
【数8】
【0037】
(R1−R2)/cは、表面要素dsからインターフェロメータ要素のx1、y1およびx2、y2までの光の進む時間の差であることに留意されたい。Rを、インターフェロメータの面と体積のZ=0での参照位置Sとの間の距離とすると、距離R1およびR2が、式(11)および(12)に示すように、書くことができる。
【0038】
【数9】
【0039】
これは、式(13)および(14)に示すように、最初の2項だけが保持される2項展開に展開されることができる。
【0040】
【数10】
【0041】
これは、照射された表面の領域の広さが、インターフェロメータの面から体積参照点までの距離Rと比べて小さいと仮定することにより妥当である。進む時間の差は、式(15)に示すように、書くことができる。
【0042】
【数11】
【0043】
以下に、空間コヒーレント相関関数の分母における積R1R2を、R2で近似する。
【0044】
まず、以下の式(16)〜(23)に示すように、置き換えを行う。
【0045】
【数12】
【0046】
空間コヒーレント相関関数は、今式(24)に示すように、書くことができる。
【0047】
【数13】
【0048】
これはまた、式(25)に示すように、位置u、v、(w=0)および周波数チャンネルkでの視感度関数でもある。
【0049】
【数14】
【0050】
2πνkδ/cという項は、波の前方が完全に平らではないために、2つのインターフェロメータ要素への経路差により生じた位相シフトである。この項は、もし測定される体積がインターフェロメータの遠くの場にあるならば、非常に小さいので無視することができる。もし測定される体積がインターフェロメータの近くの場にあるならば、この項は、直角座標の代わりに球座標を用いることにより取り除くことができる。
【0051】
次に、深さの測定を考察する。参照時刻tは、波の前方が、インターフェロメータの面における送信ホーンを離れた時刻として定義される。送信波は、規格化できて、式(26)に示すように、表される。
【0052】
【数15】
【0053】
インターフェロメータ12により受信される波と送信波との相互相関を取ることによりフリンジストップを行い、式(27)に示すような時間コヒーレンス関数を得る。
【0054】
【数16】
【0055】
追加遅延は体積Wの中であるからτ=−2Z/Vであり、wk=νkであることを認識すると、3次元の視感度関数が、式(28)に示すように、書くことができる。
【0056】
【数17】
【0057】
小さな補正項は別として、視感度および明るさの分布は、フーリエ対であり、体積Wの3次元反射分布は、u、v、w座標系における測定から、式(29)に示すように、復元される。
【0058】
【数18】
【0059】
データは、各受信要素に対する各周波数に対して受信される。そのような各要素信号は、その後参照ユニットにおいて各周波数チャンネルで送信された信号と位相が比較される。各ユニットおよび各周波数チャンネルに対する複素電圧が、コンピュータに格納されて、各周波数チャンネルでのベースライン対として、別々に、互いのユニットと比較される。N数の受信要素に対して、周波数チャンネルあたり、N(N−1)/2の重複しないベースライン対がある。新しいデータ体積は、その後、3次元反射体積を描くために、X/R、Y/RおよびZ座標へ変換される。もし、体積の内容が先験的に既知、例えばデータが固体表面である、であれば、その後体積のモデルを仮定することができる。そのモデルの応答が、各ベースライン対および周波数に対して計算できる。モデル化されたデータは、観測されたデータと比較することができ、そのモデルは、その後、観測されたデータとモデル化されたデータとの間の差を最小化するように統計的に調整される。最大エントロピー法および最尤法等の多くの良く知られた誤差最小化方法が存在する。
【0060】
1次元のケースでは、上記の3次元視感度関数は、式(30)に示すように、縮小される。
【0061】
【数19】
【0062】
これは、通常のある1点での深さ測定に対して用いられる積分である。このケースでは、送信器および受信器は同じユニットに置かれており、送信された信号は、各周波数チャンネルで受信された信号とのみ相互相関が取られる。
【0063】
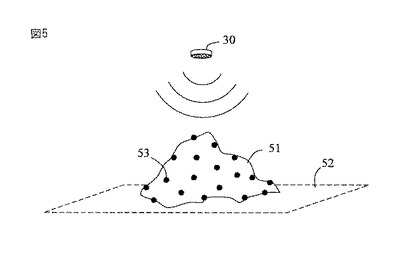
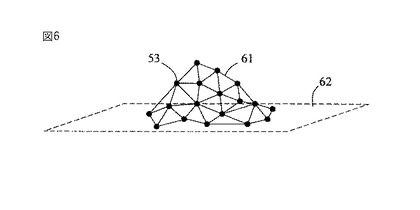
図5および図6は、本発明の好ましい実施形態に関する。この実施形態においては、上述した位置決めシステムおよび方法が、図8を参照して述べた方法を用いて、完全なトポロジー的表面を描くために用いられている。図5は、フロア表面52上に置かれた、積み重なり51の形をした対象物を模式的に示す。アンテナユニット30は上に置かれており、対象物51に向かっている。上述した手順に従って、コヒーレントな電磁波信号が対象物に向かって送信される。対象物上には、多くの反射点53が、検知されて、対象物の解析、およびアンテナユニット30の受信器において検知された反射信号に基づいた計算を通して位置決めされる。位置決めされた反射点53それぞれに対して、その座標が、コンピュータシステム、例えばコンピュータ5、に接続されたメモリに格納される。図6は、検知された反射点53の位置の3次元表示である表面61を生成するために、隣接する座標の間のリンクを完成して、位置座標において、イメージ処理ソフトウェアがどのように実行されるのかを模式的に示す。離散する点からどのように表面を生成するかについての多くの良く知られたモデルがあり、用いるべきモデルは、解像度、精度および処理パワーにおける必要性に依存して選択されても良い。
【0064】
位置決めシステムおよび方法は、また、位置決めがなされた中での視野を更に解析するために用いられても良い。この目的のために、検知された表面61により、好ましくは積分により、定められる体積を定めるために、コンピュータシステムの計算ユニットが採用されても良い。一実施形態では、体積測定が、架空の下側の表面62、つまり検知された反射点の遠い側の表面、に向かった積分により実行されても良い。ここで、下側の表面の位置は、例えば最も遠い検知された位置を通る平らな表面により表されていても良い。代わりに、前もって決めておくことによるか、または反射点が存在しなかった場合に測定されることにより、バックグラウンド参照表面62の存在および位置が知られても良い。典型的には、参照表面62は、対象物51が置かれている地面またはフロアレベルであるかもしれない。一度体積が測定されると、検知された反射点53および参照表面62から測定された表面61により定められた対象物に対して、重量もまた見積もられるかもしれない。これは、既知の対象物の密度が与えられると、簡単な計算である。
【0065】
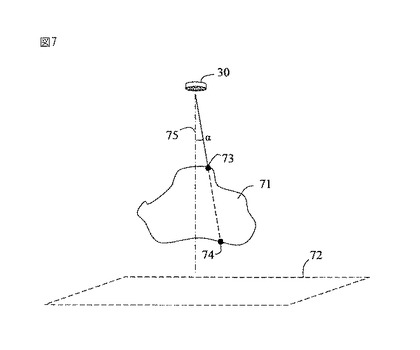
本発明の実施形態では、送信された信号に用いられている電磁波の波長は、1−100GHzの波長領域にある。この領域の中の範囲では、多くのタイプの物質は、透明または半透明である。そのような物質の例には、油のような液体、土、穀物の粒、およびいわゆるコークスである炭化石炭のような粒状の物質が含まれる。そのような物質に対しては、波が透過すると、第1の表面で1つめの反射が生じ、第2の表面で2つめの反射が生じる。そのようなシナリオの例が、対象物71が解析されている図7に模式的に示されている。対象物71は、対象物71に向いているアンテナユニット30により送信される波長の放射に半透明である。対象物71は、バックグラウンド表面72の上か、またはバックグラウンド表面72から離れて置かれていても良い。図7では、簡単のために、1方向の測定のみが示されている。一方、視野75の主視線に関して120度までであるかも知れないところの、アンテナユニットの全ビーム角度において同時にコヒーレント波を送信するために、等方性アンテナが好ましく用いられるということが、上述したことから理解されるべきである。本発明の位置決め処理では、視野75の主視線から角度αにおいて、送信波が、対象物71に最初に衝突する位置を表している第1の反射点73が検知されて位置決めされる。再度簡単のために、角度αは主視線を横断する1次元のみにおいて示されている。反射点73は、上述したように概説した方法に従って位置決めされる。しかしながら、対象物71の表面もまた送信された信号の放射に透明なので、反射点73で対象物に衝突した放射の一部分は、破線で示されているように、対象物71の中を通り続ける。第1の表面部分における反射率は、強度が(n1−n0)/(n0+n1)に比例する。ここで、n0は対象物の前の媒体、典型的には空気、の屈折率を表し、n1は、問題となっている周波数に対する対象物71の屈折率を表す。対象物71の中を通って伝播した後、新たな反射点74が放射の一部分を、再び屈折率のずれに依存して、反射する。また3番目の反射が、参照またはバックグラウンド表面72、図面には示されていないが、から得られるかもしれない。
【0066】
本発明に対する様々な用途が、図9−15を参照して、以下に述べられる。これらの用途の実施形態において、位置、表面、体積、質量等を定めるための計算は、図1に示すように、制御ユニットまたはコンピュータ5により実行されることが好ましい。そのような制御ユニットの実際の実施形態は、ここではこれ以上詳細には述べないが、そのような制御ユニットの一実施形態は、各ケースにおいて図8を参照して説明された理論に基づいているが、程度の差はあれ各実施形態に対して特異的であるように計算を実行するように工夫されている、マイクロプロセッサシステムおよびプログラムコードを備えたコンピュータである。実際の計算が、信号ジェネレータを制御するコンピュータ5において実行される必要がないということにもまた留意すべきである。しかし、実際の計算が、コンピュータ5が通信可能に接続されている他の制御ユニットにおいて行われても良い。
【0067】
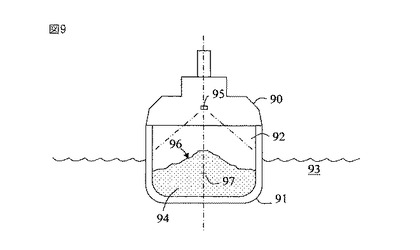
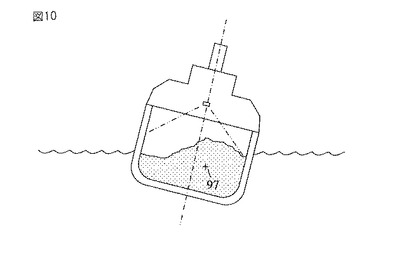
図9は、船のような貨物ベッセルにおいて、本発明に対する用途の実施形態を示している。船体91の内部には、1つまたはそれ以上の貨物空間92が設けられている。図9は、水93の上に運ばれている海上船舶90を示しているが、説明される実施形態は、飛行機またはヘリコプタのような、エア・ベッセルに等しく適用される。貨物空間92は、様々な種類の貨物94、および特に大きな容積の液体または粒子状物質、を輸送するために用いられるかも知れない。例として、油、および石炭、鉱石、コークス、くず鉄等の他の液状物質が含まれる。そのようなルーズな貨物に関する問題は、船舶の動きまたは貨物の下手な荷積みのために、貨物空間の内部で浮いたりまたは横滑りしたりするかもしれないということである。図10に示されるように、いつか、ルーズな貨物の中心をかなり外れた位置ずれが、船舶の傾きをもたらすかもしれない。水93または空気の中において、最適な位置から少しでもずれることは、燃料消費の増加をもたらすと共に、最終的に危険であるかもしれない。
【0068】
本発明の実施形態では、この問題が、図1−8を参照して上述した、貨物空間92における貨物94に向けたアンテナ95を備えることにより克服される。このアンテナ95は、図8を参照して述べられた方法を用いて多数の反射点の位置を定めるための装置の一部を形成する。アンテナ95は、貨物空間92の天井の近くに配置されており、少なくとも側壁の所定の高さまで貨物空間をカバーする視野をアンテナに与えるアンテナパッチが設けられていることが好ましい。図では、視野は2点鎖線で示されている。アンテナ95は、貨物の上側表面の現在の形状および位置が判断できるような、ディスプレイまたはオペレータへのデータ出力を備えた監視システムとつながっていることが好ましい。アンテナは、貨物の上側表面96における多数の反射点の位置の測定のための装置につながっていることが好ましい。この装置は、更に、図5および6を参照して述べられた本発明に対応して、上記多数の反射点の測定された位置に適合する表面の3次元表示を生成するように工夫されている。アンテナは貨物空間に関して固定されているので、文字通り貨物空間の壁という、貨物のバックグラウンドの位置および形状は、良く分かっている。更に、貨物物質94の組成もまた、通常少なくとも大まかには分かっている。既知のバックグラウンド、測定された表面の位置と形状、および貨物94の物質の密度についての情報は、監視システムにおいて用いても良い。バックグラウンドに対して測定された表面を積分することにより、貨物94のボリュームの寸法および形状が計算でき、これにより、また貨物空間92における貨物94の質量中心の位置が計算できる。密度の情報を用いることにより、貨物に対する全質量もまた計算できるので、傾斜パラメータを、計算された全質量および質量中心97の位置から決めることができる。傾斜パラメータは、例えば、船舶に対する質量中心への距離パラメータおよび貨物質量に対する大きさパラメータを含む、貨物の質量によりもたらされる傾斜力の尺度として与えられても良い。本発明の実施形態では、傾斜パラメータが計算されて、該傾斜パラメータがプリセット値を超えた時に、監視システムが警告または情報の出力を発するように取り決められている。これは、貨物を積み込む間にまたは航海中に監視システムのオペレータに警告するために用いられても良く、また貨物を再配置するための決定根拠として用いられても良い。
【0069】
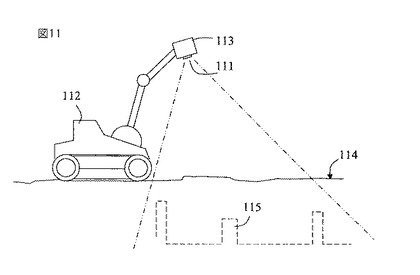
図11は、地面を突き抜けるレーダ(GPR)として用いられた場合の本発明に対する用途の実施形態を示している。GPRシステムは、地面の下の対象物を位置づけるために、様々な目的のために用いられる。パイプ、タンクおよびドラムの位置、地質学の研究、墓の調査および考古学の調査といった様々な分野の用途が含まれる。通常、低いレーダ周波数が、高い周波数よりも、地面の中により深く突き抜けるための使用に適している。与えれた範囲のGPR調査を行うための標準的な手順は、そりで運ばれた、基本的には1次元ビームを有する、レーダを用いることと、範囲全体に亘って該そりをあちこちにひきずることである。処理中に捕らえられたレーダの応答は、地下のイメージを生成するために、その後レーダそりによりたどられた経路の情報と結合される。この先行技術は、扱いにくく、時間がかかり、平らでない表面にあまり適合しないという点において、いくつかの欠点がある。更に、そりの経路は、正確なイメージを得るために注意深く制御される必要がある。
【0070】
図11の実施形態では、図1−8を参照して上述のように説明されたアンテナ111を用いることにより、これらの欠点を克服するGPRシステムが提供される。このアンテナ111は、図8を参照して述べられた方法に従い操作されて、多数の反射点の位置を定めるための装置の一部を形成する。アンテナは、高い位置で、支持構造113上で、持ち上げ装置112、例えばクレーンまたはキャタピラ(登録商標)、により運ばれる。アンテナ111の位置は、そのように、該アンテナを運ぶ支持構造113の位置に直接連結されている。この支持構造113は、伝統的な三角測量技術を用いるか、またはキャタピラ(登録商標)112のGPS受信器(図示せず)により読み出されたGPSデータを用いて、位置決めされても良い。アンテナ111の視野(FOV)は、該アンテナのアンテナ要素またはパッチの設計により決められる。現在の所、本発明のアンテナは、120度までのFOVを備えて製造されている。理論的には、地面114の上方約5メートルにキャタピラ(登録商標)112により持ち上げられているようなアンテナ111が、図11によるシステムにおいて用いられた場合、アンテナは230m2に亘る表面の領域をカバーする。10メートル上方に位置した時は、理論上の被覆率は約1000m2である。実際には、持ち上げ装置112としての運搬装置の前の地面をさらすために、図に示されているように、支持構造113を上下に動かすことが都合が良い。図7を参照して、およびより詳細には体積Wにおける測定の用途のために図8を参照して、一般論として上述した処理を用いる場合、地面を突き抜けるレーダシステムおよび方法は、地下の特徴115を探知するために提供される。このようなソリューションの長所は、アンテナによりカバーされる範囲の全体のイメージが、アンテナを動かす必要がなく、一斉に描かれることである。これは、簡単な手順の結果であり、この手順はまた、全体の範囲に対して1つの位置決めステップだけがなされることが必要であるため、測定誤差にあまり敏感ではない。
【0071】
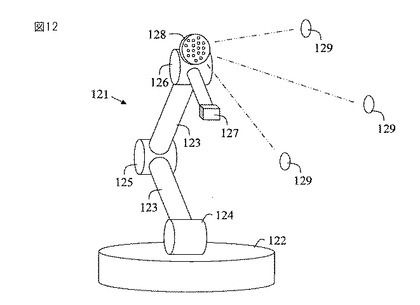
図12は、本発明が産業用ロボット121に対する位置決めおよび案内手段として用いられた時の、本発明に対する用途の実施形態を示している。ロボット121は、固定ベース122、および1つまたはそれ以上のリンケージアーム123とピボットポイント124,125,126とを備えた可動な操作機構を有している。ロボットヘッド127は、ロボットの前方の端の部分に結合されている。ロボットヘッド127は、良く知られた2,3のオプションを挙げると、例えばグリッピングツール、溶接ツール、組み立てツールを持ち運んでいても良い。ロボット121は、組み立てライン上の装置のような、いくつかの対象物(図示せず)の形態において、操作に用いられる。この対象物は、ロボットベース122に対して静止しているかまたは動いていても良い。適切に働きおよびその仕事を行うために、ロボットは、特にロボットヘッド127は、正確に位置決めされる必要がある。
【0072】
図12の実施形態によれば、この目的のための位置決めシステムは、図1−8を参照して上述したアンテナ128を含んでいる。このアンテナ128は、図8を参照して述べられた方法に従い操作されて、多数の反射点の位置を定めるための装置の一部を形成する。図に示す一実施形態では、アンテナ128は、ロボットにより持ち運ばれており、該アンテナ自身に対して、多数の反射点129をさらして位置決めするために用いられる。本発明の位置測定方法は、反射点に対して3次元的位置を計算するように工夫されているので、しっかりと空間における対象物の位置を決めるためには、対象物に固定されている2つの反射点129で、理論的には十分である。アンテナ128は、ロボットヘッド127に関して所定の位置に固定されている。従って、アンテナ128と反射点129との間の相対位置が一度定まると、ロボットヘッド127に対する反射点129の相対位置もまた定めることが可能である。ロボット121により操作される対象物上の反射点129を定めることにより、上述したように反射点の位置を定めるためにアンテナおよび装置を用いて対象物の位置が定められる。その後、ロボットヘッド127が、対象物に近づくために制御されて向けられるかもしれない。
【0073】
反射点は、バックグラウンドのノイズレベルから識別される必要があり、従ってアンテナ128の視野の中で捕捉されたすべてのピクチャの中で見つけられる必要がある。対象物上の明確な場所の上にレーダターゲットを使用することが、これを行う1つの方法である。このレーダターゲットは、通常ボート上に用いられるレーダターゲットと同様のキューブ・コーナ(コーナ・レフレクタ)・ターゲットである。
【0074】
図12の実施形態の変形例では、アンテナ128は、ロボットから離れているか、またはロボットヘッド127に関して位置が固定されていないが、固定ベース122に関しては位置が固定されているロボット121の一部に設けられていても良い。アンテナ128は、更に反射点129を持ち運んでいる対象物をさらして位置決めをするために用いられる。一方で、ロボットヘッド127の位置は、ロボットベース122の固定された位置およびロボット操作機構の相対的な設定から分かる。その後、ロボットに対する制御システムが、ロボットヘッド127の動きを制御するために、アンテナ128により定められた対象物に対する位置情報を用いるかも知れない。
【0075】
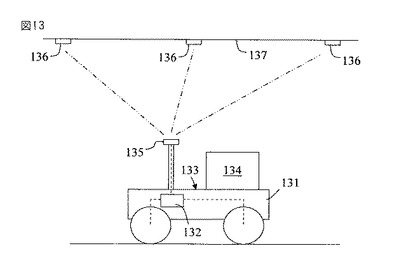
図13は、本発明が車に対する位置決めおよび案内手段として用いられた時の、本発明に対する用途の実施形態を示している。多くの産業上の用途において、組み立て工程と倉庫の間のような、異なる工程間で物を移動するために、自動トラックまたは他のタイプのモータのついた運搬プラットフォームが用いられている。そのような産業上の用途の例には、大きな紙のロールが自動化された運搬車上で運送される、製紙産業および印刷オフィスが含まれる。図13は、そのような車131を示している。該車131は、運転および操縦の手段132により制御される車輪を有する。この手段132は、エンジン、典型的には電気エンジン、を備えている。プラットフォーム133は、運送される物134を積み込むことに対して使用可能である。車を案内するための先行技術のソリューションには、フロアの下に組み込まれたワイヤおよび信号ラインに関して車の位置を定めるための車のセンサ手段のような、信号ラインの形成が含まれる。
【0076】
図13の実施形態によれば、この目的のために、代わりの位置決めシステムは、図1−8を参照して上述したアンテナ135を含んでいる。このアンテナ135は、図8を参照して述べられた方法に従い操作されて、多数の反射点136に対する位置を定めるための装置の一部を形成する。アンテナ135は、車131により運ばれて、アンテナ自身に関して多数の反射点136をさらして位置決めをするために用いられる。反射点は、所定の位置に固定されているので、位置決めの手順それ自体は、車131の位置を定めるために働く。図12を参照して述べられたように工夫されている反射点は、天井にまたは天井の近くに位置しており、互いに間隔を空けていることが好ましい。各2つの反射点の間の間隔は、アンテナ135の視野が常に少なくとも2つの反射点をカバーするように選ばれる。一実施形態では、同じ反射点が、常に車131のすべての操作範囲中にアンテナ135によりカバーされるように支持される。もっと広い操作範囲に対しては、車が、カバーする異なるサブセットの間を進むように工夫されているような、多数の反射点を提供する必要があるかも知れない。このサブセットは、2つまたはそれ以上の反射点からなる。そのような実施形態では、車を運転および案内するためのシステムは、レーダアンテナ135によりどのサブセットが現在照射されているのかを知るために、採用される必要がある。またこのシステムは、多数の反射点の位置を定めるための装置を含む。各2つの隣接する反射点の間に固有の間隔を用いることが、これを達成するための1つの方法である。反射点への方向、距離および角度が、上述した方法を用いて定められて、2つのさらされた反射点の間の距離の測定もまた計算される。2つの反射点の間の定められた距離を、所定の間隔の情報と比較して、どの2つの反射点がさらされているのかを一意的に特定する。2つのさらされた反射点のみを備えた簡単なケースに対しては、本当にアンテナ135および車131に対して2つの異なる点がある。車131は、同じ応答を与えるかもしれない。間隔を注意深く選ぶことにより、少なくとも3つの反射点が常にさらされることを保証することが、これを克服する1つの方法である。車を運転および案内するためのシステムの論理フィルタにおいて、2つ位置の選択の内の1つを単に除外することが、これを克服する他の方法である。この方法は、2番目の可能な位置が、車の意図している経路に無関係である時に用いられるかもしれないが、車がその2番目の可能な位置に存在しない理由はない。
【0077】
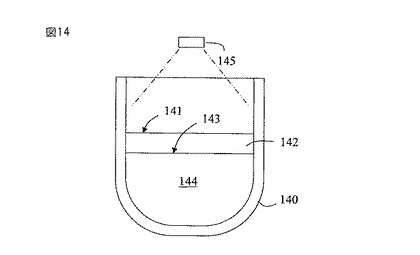
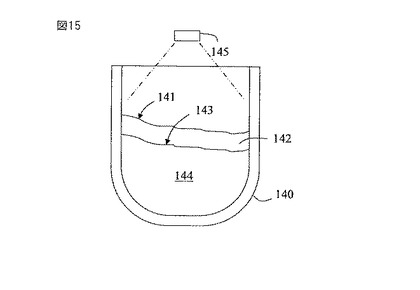
図14は、本発明が炉140内のスラグ表面141を監視するために用いられた時の、本発明に対する用途の実施形態を示す。転換炉、レイドル、アーク炉および他の治金炉において、スラグ表面141、およびまた任意的にスラグおよびその下の液体金属144との間の接触面143の正確な位置を知る必要がある。干渉分光法を用いて、スラグ表面の位置を測定するための方法が知られている。例えば、本用途の発明者へ発行された米国特許第5629706号がある。しかしながら、それおよび他のソリューションは、基本的に1次元であり、それ自体は、スラグ表面141の1点において、該スラグ表面141および金属表面143の垂直位置を測定するように工夫されている。しかしながら、炉内の金属の領域に関する問題は、一様でないかまたは非対称に溶けていることである。そのようなシナリオが、スラグ表面141および金属表面143が右側よりも炉140の左側において大きく高くなっている図15に模式的に示されている。これは、炉の壁に深刻なダメージを及ぼす左側のホットスポットにつながり、最終的には壁を通して燃焼する。
【0078】
図14および15の実施形態によれば、図1−8を参照して上述したアンテナ145を含む位置決めシステムを用いて、そのような非対称な溶解物144が生じる可能性が監視される。このアンテナ145は、図8を参照して述べられた方法に従い操作されて、多数の反射点の位置を定めるための装置の一部を形成する。図8に関連して、体積Wは、本実施形態では、表面141、143および炉の壁との間に定められるスラグ体積142である。位置決めシステムは、図6に似たスラグ表面141の3次元表示を提供するように動作する。この3次元表示は、炉のオペレータへ画面上に映し出されるかも知れない。代わりに、炉に対する警告システムが、3次元表示の位置データとプリセットレベルの値との間の比較を行うために用意されていて、もし比較の結果として上記位置データが上記レベルの値を超える場合には、警告信号を発するように工夫されていても良い。スラグ表面141の周辺が炉の壁の周囲で変化する端の値の中で計算すること、およびこの値を所定の変位基準と比較することが、これを行う1つの方法である。本発明により、スラグ表面の全体に亘る位置の測定が、1つの固定されたアンテナ145を用いて達成される。
【0079】
実験配置
図16に特定されるように、上述した方法を確認するために実験を配置することができる。基板160上のパッチから形成された多数のアンテナ要素が、各アンテナがスイッチのセットの入力へ接続されるように、スイッチシステム162へ接続されている。このスイッチシステムは、個々のアンテナが選択されるように、コンピュータ166へ接続されている。スイッチシステムの出力は、どのアンテナも常に受信器に接続できるように、受信器163へ接続されている。また1つのアンテナ161が、送信器164へ接続されている。このアンテナ161は、基板160上のパッチとして好ましくは含まれているが、簡単のため離れた要素として示されている。送信器および受信器は、ネットワークアナライザ、例えばWiltron360B VNA、である。ネットワークアナライザ機器は、周波数帯に亘って周波数をステップ状に、例えば11GHzから12GHzへ501ステップで、好ましくは等間隔で、変化させる。各周波数ステップに対して、各受信アンテナはスイッチが入れられて、周波数ごとに各アンテナ要素に対して、送信された信号が受信された信号により除されて、データがコンピュータに記録される。
【0080】
代わりに、各アンテナ要素に受信器が供給されていても良い。そして、すべての受信器は、コヒーレントな干渉システムを形成するために、共通の周波数標準に位相が固定されていなければならない。そして、データは、一斉に記録される。
【0081】
その後、データは、各受信アンテナに対して、周波数から遅延時間へフーリエ変換される。各アンテナへのデータは、インターフェロメータの光学中心からのオフセットのために、位相がずれている。その後、ベースラインが、遅延チャンネルごとに各アンテナ対に対して複素共役乗算を行うことにより再構成される。その後、2次元のフーリエ変換が、ベースライン座標から角度座標へ変換するために、遅延チャンネルごとのすべてのベースライン対に亘って行われる。新しいデータキューブは、同心球上の2次元角度として、3次元インターフェロメータ応答を含んでいる。その後、座標系は、データキューブをより良く表示するために、直角座標系へ変換することができる。
【図面の簡単な説明】
【0082】
【図1】図1は、位置を定めるために、本発明の実施形態に従って、1つまたはそれ以上の反射点の位置を定めるための装置のシステム配置を模式的に示す。
【図2】図2は、本発明の実施形態に従って、アンテナユニットの実施形態を模式的に示す。
【図3】図3は、本発明の実施形態に従ったアンテナを用いて、極座標における中心を外れたターゲット位置の位置決めを模式的に示す。
【図4】図4は、図3によるアンテナを通る平面の射影における、中心を外れたターゲットの位置決めを模式的に示す。
【図5】図5は、本発明の実施形態に従って、3次元表面上の多数の反射点の位置決めを模式的に示す。
【図6】図6は、本発明の実施形態に従って、探知された反射点から表面の表示の生成を模式的に示す。
【図7】図7は、本発明の実施形態に従って、3次元対象物上の深さにおける2つの反射点の位置決めを模式的に示す。
【図8】図8は、本発明の実施形態に従ったアンテナを用いて、直角座標を用いた表面に関する位置の測定を模式的に示す。
【図9】図9は、貨物船における使用に対して、1つまたはそれ以上の反射点の位置の測定に対する装置の利用を模式的に示す。
【図10】図10は、貨物船における使用に対して、1つまたはそれ以上の反射点の位置の測定に対する装置の利用を模式的に示す。
【図11】図11は、地面を突き抜けるレーダシステムを用いて、1つまたはそれ以上の反射点の位置の測定に対する装置の利用を模式的に示す。
【図12】図12は、産業用ロボットと共に用いた、1つまたはそれ以上の反射点の位置の測定に対する装置の利用を模式的に示す。
【図13】図13は、車両の位置決めおよび案内の目的に対して、1つまたはそれ以上の反射点の位置の測定に対する装置の利用を模式的に示す。
【図14】図14は、炉内のスラグ表面を監視する目的に対して、1つまたはそれ以上の反射点の位置の測定に対する装置の利用を模式的に示す。
【図15】図15は、炉中のスラグ表面を監視する目的に対して、1つまたはそれ以上の反射点の位置の測定に対する装置の利用を模式的に示す。
【図16】図16は、ベクトル・ネットワーク・アナライザを用いた典型的な実験配置を模式的に示す。
【符号の説明】
【0083】
1 信号ジェネレータ
2 パワースプリッタ
3 送信アンテナ
4 受信アンテナ
5 位相比較ユニット
6 コンピュータ
30 アンテナユニット
【技術分野】
【0001】
本発明は、コヒーレントな電磁気放射を用いて、反射点の空間における位置を定めるための解決法に関する。特に、本発明は、レーダアンテナのアレイを用いて、対象物および表面の3次元イメージデータを得るための装置および方法に関する。
【背景技術】
【0002】
様々な用途において、ある要素の空間における位置の測定を行いたいという必要がある。本明細書において、位置は、1次元、2次元または3次元における相対位置を意味する。これは、参照位置に対して離れた要素の位置を定めること、または、表面もしくは物体全体のイメージ表示を取得することが含まれる。
【0003】
位置を決める一つの方法は、Radio Detection And Rangingというレーダを用いることである。レーダという言葉は、対象物、典型的には離れた対象物、を探知するために短い波長の電磁波を用いて、それらの位置および動きを測定する方法を意味すると理解される。レーダは、アンテナを備えた送信器、反射するターゲット、送信器のアンテナと同じでも良い、アンテナを備えた受信器、およびアンテナとターゲットとの間の伝送路を含む。レーダシステムは、もともとは軍事目的のために開発されたが、今日では多くの民生用および産業用の用途にも同様に用いられている。レーダの一般的な概念の中には、異なる特徴を備えた様々な方法および装置、および一般に技術上1−100GHzの間のマイクロ波の領域で操作されるレーダアプリケーションがある。レーダが位置決めの目的のために用いられる場合、用いられる様々なタイプのレーダ技術には、パルスレーダ、FMCWレーダおよびインターフェロメータレーダが含まれる。パルスレーダは、短い持続期間の電磁気パルスを送信する。該パルスは、搬送波が変調されていてもされていなくても良い。ターゲットまでの距離は、送信と受信との間の経過時間から計算される。周波数変調連続波であるFMCWレーダにおいて、信号は連続的に存在するが周波数は変調され、通常は継続する直線状の傾斜の状態に変調される。これは、現在送信される波と、周波数の傾斜上の時間上の別な点で送信されたところの、同時に受信される波との間の周波数の差を計算することにより、kHzオーダの小さな周波数差の信号が得られる、ということを意味する。その信号の周波数は、ターゲットまでの距離に比例する。インターフェロメータレーダは、ある時間の間一定周波数の信号を送信して、送信した該信号を、ターゲットにおける反射後受信された信号と比較することにより機能する。送信および受信された信号を、混合信号を得るために、インターフェロメータにおいて重ね合わせることにより、両信号間の相対位相が推定される。得られる精度はかなり高いが、その結果は、信号の波長の半分の周期を有する。
【0004】
ターゲットまでの距離を測定するための多くの様々な解決法が、上述した技術の基本原理に基づいて、提案されて来た。対象物までの距離を測定する場合、ホーンアンテナまたはパラボラアンテナのような、指向性アンテナが、送信および受信両方のために一般に用いられる。そのような装置が、液体媒体の非接触レベル測定のためのように、広く様々な産業用途に用いられており、主に1次元の距離の測定をする。しかしながら、多くの目的に対して、1次元の距離測定は十分ではない。
【0005】
表面全体に亘るレーダ探知のための一つの既知の解決法は、長いアンテナをシミュレートするために動くプラットフォームを用いる、合成開口レーダSARである。飛行機または人工衛星が、該プラットフォームになり得る。パルスが搭載されたレーダから放射されて、反射した信号が、その後プラットフォームがターゲットエリア上を飛行している間に受信される。従って、同じ受信器が、飛行経路に沿った異なる場所で、信号を受信するために用いられる。このように、パルス長に亘る飛行経路と同じ長さを備えた長いアンテナを合成することができる。SARは、主に地球資源の観測およびマッピング、または軍事使用のために使われている。非特許文献1は、2ーDInverseSAR(ISAR)イメージングを3Dへ変更するための方法を開示している。この非特許文献1は、2ーDISARイメージが、ターゲット上の各散乱中心の相対高度の情報を提供できないという欠点を、異なる高度でのアンテナにより測定された2つの2Dイメージを合成することにより克服することを提案している。
【0006】
2ーDイメージングに対する他の既知の解決法には、フェーズド・アレイ・レーダがある。フェーズド・アレイ・レーダは、大きなアンテナを合成するために、普通は小さなラジオホーンまたはパッチ要素である多数のアンテナを用いる。アンテナ要素は、アレイの直径のビーム寸法を有するシングルビームを形成するために、組み込まれたシステムコンピュータで位相が調整される。ビームは、要素ベースの位相オフセットを設けることにより、空に位置づけられる。その後、パルスがビームを通って放射されて、高い角度分解能で、同じビームを通って受信される。それゆえ、空のレーダスポットは、簡単に変えることができて、空が、探知を避けるために小さなビームで効率的に走査されることができる。フェーズド・アレイ・レーダは、小さなビームで走査して、通常、小さな角度のビームを有し且つ可動部を用いることなくターゲットを追跡できるので、軍事目的のために開発される。
【0007】
2ーDイメージングのためのまた他の解決法が、非特許文献2に提案されている。この非特許文献2において、イメージングインタフェロメータは、各検出器が入射するTHz放射の振幅および位相を測定する、個々の検出器のアレイから構成されることが提案されている。個々の検出器のすべての異なる対の組み合わせの空間フーリエ成分から、イメージが生成される。
【0008】
【非特許文献1】Xiaojian Xu et.al、”Three−Dimensional Interferometric ISAR Imaging for Scattering Diagnosis and Modelling”、IEEE Transactions on Image Processing、Vol.10,No.7,July2001
【非特許文献2】John F.Federici et.al,”Terahertz Imaging Using an Interferometric Array”,Applied Physics Letters,Vol.83,No.12,22September2003
【発明の開示】
【0009】
本発明の全体の目的は、空間における位置での反射点で反射された信号を検知することによって、これらの位置を定めるために、電磁気信号の送信を用いる方法およびシステムを提供することである。特に、3次元における反射点の位置を定めることができることが目的である。
【0010】
本発明の第1の形態によれば、この目的は、添付の請求項に従う方法を実行するために工夫された機器およびアンテナユニットと同様に、添付の請求項に従う方法により実現される。特に、本発明は、反射点の位置の測定、および位置決めされた反射点に基づいて、表面と体積を有する対象物の3次元表示の生成に対する解決方法を提供する。本発明は、広い角度の送信ビームおよび受信視野を有するアンテナ設計を好ましく用いており、このようにして、表面領域または対象物の全体が、同時にさらされて、位置決めされるかもしれない。様々な好ましい実施形態および応用分野が、従属請求項に提示されている。
【0011】
本発明の好ましい実施形態が、添付の図面を参照して詳述される。
【発明を実施するための最良の形態】
【0012】
本発明は、電磁気信号の送信および反射点においてその位置で反射された信号の検知によって、空間における位置を定めるための新規な方法、および装置またはシステムに関する。
【0013】
図1には、本発明の実施形態で用いる装置の模式的表示が示されている。信号が、信号ジェネレータ1を用いて、決められた周波数で生成される。この信号は、ケーブルを経由して、パワースプリッタ2へ運ばれる。パワースプリッタ2は、1つのパスがケーブルを経由して送信アンテナ3へ伝わっている。2つ目のパスは、ケーブルを経由して、参照信号として用いられる位相比較ユニット5へ伝わっている。送信アンテナ3は、信号ジェネレータ1により生成された電磁気信号を、つまり送信器は例えば円偏波のラジオ波の形において、一つのまたは多数の反射点(図1には図示せず)に向かって、送信するように、工夫されている。送信された信号がターゲットの1つのまたは多数の反射点に衝突すると、それは、少なくとも部分的に反射して、反射した信号は、増幅器を備えた受信アンテナ4、つまり受信器、により受信される。円偏波した波に対して、反射した波は、奇数の反射のために、反対の円偏波状態で受信される。受信した信号は、ケーブルを通って位相比較ユニット5へ送られて、そこで、時間参照信号の共役と複素乗算される。複素共役乗算の位相が、および可能であれば振幅も、コンピュータ6によりテーブルに格納されて、信号ジェネレータが、周波数を変えて、新しい測定が始まる。この手続きは、ある周波数帯に亘って、ある数の周波数チャンネルが、別々に測定されるまで続く。装置は、コンピュータ、例えばコンピュータ6、を含む制御ユニットにより制御される。コンピュータは、またデータを格納したり、信号解析を行う。
【0014】
図2は、インターフェロメータとも呼ばれるアンテナユニット30の実施形態を模式的に示す。本発明によれば、アンテナユニット30は、また図1のアンテナ3に対応する送信アンテナ31と、図1のアンテナ4に対応する多数の受信アンテナまたは検知器32とを備えている。送信アンテナ31は、受信アンテナ32とは分離していても良いが、受信アンテナ32の内の1つが、また送信アンテナ31として動作することが好ましい。図2は、20個のアンテナ要素を備えた実施形態を示しており、20個の受信アンテナ32として作動するように工夫されていて、その内の1つがまた送信アンテナ31として作動するように工夫されている。これは、単に、アンテナ要素の可能な数の無限な数の1つである。32個のアンテナ要素を用いたテストが、首尾よく行われている。アンテナ要素は、少なくとも1次元の状態で間隔が空けられており、好ましくは図2に示すように平面内において、適切に支持部材33上に取り付けられて、該支持部材33により支えられることが好ましい。その面、つまり図2に示すように下側表面の面、の法線方向は、アンテナユニット30に対する主視線を決定する。アンテナは、その上に導電性材料のパッチがエッチング処理されている、誘電性材料から形成された平らな膜であっても良い。導電性のパッチは、適切な波長に対するアンテナ要素を構成するように個々に形成されている。マイクロ波領域のアンテナに対するビームは、およそλ/dのハーフ・パワー・ビーム幅を備えた回折限界がある。ここで、λはマイクロ波の波長であり、dはアンテナの物理的直径である。アンテナ要素の寸法は、個々のアンテナビームが、例えば120度という、測定されるべき十分な体積をカバーしているように選ばれる。
【0015】
アンテナ要素31,32は、各アンテナ要素が、ターゲットの大きな表面領域を照射する、またはターゲットの大きな表面領域からの放射を検知するように、大きなビーム幅または視野を有するように構成される。このように、アンテナユニット30は、固定された周波数のコヒーレントな電磁波に、位置づけられる全体の場または対象物がさらされて、且つ同時に全体の場または対象物から反射された信号を受信することに対して用いられるように工夫されている。
【0016】
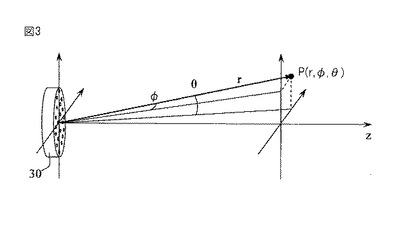
図3は、どのようにアンテナユニット30が、座標系を定めるかを模式的に示している。この座標系では、反射点の位置Pは、Pがアンテナユニット30の選択された中心に対して座標P(r、φ、θ)を有する極座標系で判断されることができる。しかしながら、主視線は、アンテナユニット30のアンテナ要素31,32が配置されている平面の法線方向であるZにより表されている。
【0017】
図4は、図3の3次元系のアンテナ30を通る平面における射影を示す簡単な図面であり、本発明の位置決め方法がどのように働くのかを理解するための基本的な例として役立つ。図4は、Pから反射されて戻ってきた電磁波Eの前方が、どのようにアンテナユニット30で受信されるのかを模式的に示す。射影において、2つの受信アンテナ321、322が、主視線の方向zと垂直な方向に、間隔dを空けている。更に、示された射影において、Pから反射されて戻ってきた電磁波は、主視線に対して角度αで受信される。受信されたコヒーレントな電磁波Eの終点が図面に表されており、この終点から、受信アンテナ321および受信アンテナ322における時間の位置において、検知される信号の位相差があることが明らかである。送信されて、その後受信される電磁波Eの周波数が既知なので、電磁波の前方Eの波長も既知である。2つの受信アンテナ321,322において検知される信号を一緒に解析することにより、検知された位相差を表す距離Δを計算することができる。この計算されたΔおよび既知の間隔dを用いて、角度αの測定が、α=arcsin(Δ/d)のように計算することができる。云うまでもないが、計算された値Δは、電磁波Eの半分の波長の周期を備えて周期的であるので、理論上は、多くの異なる入射角が同じ検知される位相差を生成する。しかしながら、電磁波の周波数が例えば1GHzであって、間隔dが数センチメートルのオーダであれば、ただ1つの角度が導出可能、つまりΔ/d<1である。更に、例えより高い周波数およびより大きな間隔dが用いられたとしても、2つ以上の受信アンテナを用いることおよびそのようなアンテナの複数の対からの信号を結合することにより、正しい角度αが固定される。例えば1,2,3という3つのアンテナが用いられた場合、正しい角度αは、1プラス2、2プラス3、および1プラス3というアンテナ対になされた角度計算と一致する。与えられた受信アンテナ数Nに対して、N(N−1)/2の可能な対の組み合わせがある。アンテナユニット30の面において、少なくとも2つの平行でない方向において、これらの計算を実行することにより、位置Pがアンテナユニット30に対して2次元内に定められる。
【0018】
ターゲットPへの距離rを測定するために、周波数ステッピング機能が用いられる。ある波信号の他の波信号に対する時間遅延は、フーリエまたは周波数空間において、周波数に対して位相の直線的なシフトである。もし、波が反射点Pに向けて送信されて、反射された場合、送信波と受信波との相対的な位相は、周波数に対して直線的に変化する。本発明に従って、この効果は、ターゲットPへの距離の射程測定を確立するために用いられる。ターゲットに対する角度の測定を確立するために、受信される反射波の前方の検知の間、上述したように、コヒーレント波に対して固定した周波数が維持される。しかしながら、更に送信された信号の周波数をステップ状に変化させ、且つ送信波と受信波との間の位相差の測定を、固定された周波数が維持されている各ステップにおいて行うことにより、送信波の周波数の関数としての位相差のプロットは、反射波の伝播遅延Δtに対応する傾斜を有する直線となる。好ましくは、周波数は、周波数帯の中で多数のステップに変化させられる。その後、線形化関数が、アンテナユニット30とターゲットの反射点Pとの間の光学的距離を表す、伝播遅延Δtの計算値を確定するために用いられる。周波数帯は、表面での反射および物質中を通る送信に対して最適化されるように選ばれる。そのような周波数帯は、スラグおよび鋼の用途に対しては10−12GHzであり、砂の表面上での反射に対しては60−70GHzである。周波数のステップの数は、不明確な距離、つまり用いられるサンプリングで測定可能な最大距離、により決められる。周波数のバンド幅の幅は、要求される不明確な距離およびサンプリングに対して1/バンド幅である、最大解像度が得られるように選ばれる。従って、実際の幾何学的距離rもまた、アンテナユニット30とターゲットPとの間に存在する媒体、既知または見積もられて、典型的には空気、の屈折率が与えられて、計算されることができる。
【0019】
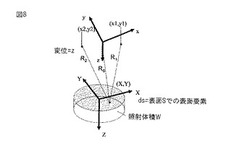
本発明に従った3次元における位置を定める発明の理論背景が、図8を参照して、今より詳細に述べられる。図8は、図3と同じシナリオを基本的に示すが、体積Wを見下ろすラジオインターフェロメータのアンテナの配置に対して直角座標系で示している。x、y、zは、インターフェロメータのアンテナ要素が取り付けられているアンテナ上の位置の直角座標を表している。X,Y,Zは体積Wの直角座標系を表す。τ=z/cは、ここでcは空気中の光速であり、アンテナから体積Wの上側の参照表面への線形遅延である。Δτ=2Z/Vは、ここでVは体積Wの中での光速であり、体積Wの中への深さ測定に対する追加遅延である。x、y、z座標系の原点は、インターフェロメータの位相中心として定義されており、一方X,Y,Z座標系の原点は、体積Wの中の参照点として定義される。
【0020】
座標ベクトルzおよびZが平行となり且つ同じ軸に沿うように、送信器が、インターフェロメータの位相中心に置かれており、平面波を体積Wの中の参照点に直接向けて送信する。z軸に沿った座標系間の距離は、Rとして定義される。照射される体積は、参照位置Sを備えたWである。
【0021】
インターフェロメータの2つの受信要素が、インターフェロメータ面上の位置x1、y1とx2、y2に位置している。まず、体積Wの参照表面のトップである位置X,Yに、表面要素dsを考える。周波数νkのラジオ波が、ここでkは周波数インデックスであり、参照点からX,Yへ、参照時刻tに送信される。このラジオ波は、受信要素x1、y1へ距離R0+R1進み、受信要素x2、y2へ距離R0+R2進む。従って、このラジオ波は、式(1)および(2)に表される量だけ遅延される。
【0022】
【数1】
【0023】
X,Y平面におけるSの各要素dsは、インターフェロメータ面上において、x1、y1に電場E1(s、t)を、x2、y2に電場E2(s、t)を形成する。各受信器での全電場は、式(3)および(4)に示すように、照射体積Wの表面Sのすべての要素全体に亘る積分となる。
【0024】
【数2】
【0025】
空間コヒーレント相関関数は、以下の式(5)に示すように、書くことができる。
【0026】
【数3】
【0027】
以下において、異なる領域からの反射は、統計的に独立、つまり反射した信号は空間的にインコヒーレントであると仮定する。コヒーレント領域は、体積イメージにおいてスペックルを形成し、個々に処理されることができる。送信源の異なる部分からの反射により生じた被積分関数における項の外積は、キャンセルし、表面要素dsから送信された電場のみを考慮する必要がある。要素dsからある距離での複素振幅は、距離に逆比例しており、式(6)に示すように、書くことができる。
【0028】
【数4】
【0029】
検討下にあるすべての体積が同じ照射を有していると仮定すると、SのX,Yでの要素dsからコヒーレント相関関数を、式(7)に示すように、書くことができる。
【0030】
【数5】
【0031】
もし、x1、y1およびx2、y2への波の到着時刻の差(τ2−τ1)が、個々の周波数チャンネルのバンド幅の逆数(Δν)−1と比べて小さいならば、つまり系の時間積分周期の中で、式(7)の右辺における角括弧の中のこの項を無視することができる。従って、式(8)のように書ける。
【0032】
【数6】
【0033】
または、直角座標においては、式(9)のように書ける。
【0034】
【数7】
【0035】
<P(t)P*(t)>という量は、送信器からの平面波が体積Wの参照表面に衝突した時刻を参照して、体積Wの中の表面Z(=0)でのピクセルdsの時間平均強度(明るさ)B(X,Y,Z)の尺度である。体積Wの表面全体に亘る積分は、点x1、y1およびx2、y2での電場の周波数チャンネルνkでのコヒーレント相関関数を、式(10)に示すように、与える。
【0036】
【数8】
【0037】
(R1−R2)/cは、表面要素dsからインターフェロメータ要素のx1、y1およびx2、y2までの光の進む時間の差であることに留意されたい。Rを、インターフェロメータの面と体積のZ=0での参照位置Sとの間の距離とすると、距離R1およびR2が、式(11)および(12)に示すように、書くことができる。
【0038】
【数9】
【0039】
これは、式(13)および(14)に示すように、最初の2項だけが保持される2項展開に展開されることができる。
【0040】
【数10】
【0041】
これは、照射された表面の領域の広さが、インターフェロメータの面から体積参照点までの距離Rと比べて小さいと仮定することにより妥当である。進む時間の差は、式(15)に示すように、書くことができる。
【0042】
【数11】
【0043】
以下に、空間コヒーレント相関関数の分母における積R1R2を、R2で近似する。
【0044】
まず、以下の式(16)〜(23)に示すように、置き換えを行う。
【0045】
【数12】
【0046】
空間コヒーレント相関関数は、今式(24)に示すように、書くことができる。
【0047】
【数13】
【0048】
これはまた、式(25)に示すように、位置u、v、(w=0)および周波数チャンネルkでの視感度関数でもある。
【0049】
【数14】
【0050】
2πνkδ/cという項は、波の前方が完全に平らではないために、2つのインターフェロメータ要素への経路差により生じた位相シフトである。この項は、もし測定される体積がインターフェロメータの遠くの場にあるならば、非常に小さいので無視することができる。もし測定される体積がインターフェロメータの近くの場にあるならば、この項は、直角座標の代わりに球座標を用いることにより取り除くことができる。
【0051】
次に、深さの測定を考察する。参照時刻tは、波の前方が、インターフェロメータの面における送信ホーンを離れた時刻として定義される。送信波は、規格化できて、式(26)に示すように、表される。
【0052】
【数15】
【0053】
インターフェロメータ12により受信される波と送信波との相互相関を取ることによりフリンジストップを行い、式(27)に示すような時間コヒーレンス関数を得る。
【0054】
【数16】
【0055】
追加遅延は体積Wの中であるからτ=−2Z/Vであり、wk=νkであることを認識すると、3次元の視感度関数が、式(28)に示すように、書くことができる。
【0056】
【数17】
【0057】
小さな補正項は別として、視感度および明るさの分布は、フーリエ対であり、体積Wの3次元反射分布は、u、v、w座標系における測定から、式(29)に示すように、復元される。
【0058】
【数18】
【0059】
データは、各受信要素に対する各周波数に対して受信される。そのような各要素信号は、その後参照ユニットにおいて各周波数チャンネルで送信された信号と位相が比較される。各ユニットおよび各周波数チャンネルに対する複素電圧が、コンピュータに格納されて、各周波数チャンネルでのベースライン対として、別々に、互いのユニットと比較される。N数の受信要素に対して、周波数チャンネルあたり、N(N−1)/2の重複しないベースライン対がある。新しいデータ体積は、その後、3次元反射体積を描くために、X/R、Y/RおよびZ座標へ変換される。もし、体積の内容が先験的に既知、例えばデータが固体表面である、であれば、その後体積のモデルを仮定することができる。そのモデルの応答が、各ベースライン対および周波数に対して計算できる。モデル化されたデータは、観測されたデータと比較することができ、そのモデルは、その後、観測されたデータとモデル化されたデータとの間の差を最小化するように統計的に調整される。最大エントロピー法および最尤法等の多くの良く知られた誤差最小化方法が存在する。
【0060】
1次元のケースでは、上記の3次元視感度関数は、式(30)に示すように、縮小される。
【0061】
【数19】
【0062】
これは、通常のある1点での深さ測定に対して用いられる積分である。このケースでは、送信器および受信器は同じユニットに置かれており、送信された信号は、各周波数チャンネルで受信された信号とのみ相互相関が取られる。
【0063】
図5および図6は、本発明の好ましい実施形態に関する。この実施形態においては、上述した位置決めシステムおよび方法が、図8を参照して述べた方法を用いて、完全なトポロジー的表面を描くために用いられている。図5は、フロア表面52上に置かれた、積み重なり51の形をした対象物を模式的に示す。アンテナユニット30は上に置かれており、対象物51に向かっている。上述した手順に従って、コヒーレントな電磁波信号が対象物に向かって送信される。対象物上には、多くの反射点53が、検知されて、対象物の解析、およびアンテナユニット30の受信器において検知された反射信号に基づいた計算を通して位置決めされる。位置決めされた反射点53それぞれに対して、その座標が、コンピュータシステム、例えばコンピュータ5、に接続されたメモリに格納される。図6は、検知された反射点53の位置の3次元表示である表面61を生成するために、隣接する座標の間のリンクを完成して、位置座標において、イメージ処理ソフトウェアがどのように実行されるのかを模式的に示す。離散する点からどのように表面を生成するかについての多くの良く知られたモデルがあり、用いるべきモデルは、解像度、精度および処理パワーにおける必要性に依存して選択されても良い。
【0064】
位置決めシステムおよび方法は、また、位置決めがなされた中での視野を更に解析するために用いられても良い。この目的のために、検知された表面61により、好ましくは積分により、定められる体積を定めるために、コンピュータシステムの計算ユニットが採用されても良い。一実施形態では、体積測定が、架空の下側の表面62、つまり検知された反射点の遠い側の表面、に向かった積分により実行されても良い。ここで、下側の表面の位置は、例えば最も遠い検知された位置を通る平らな表面により表されていても良い。代わりに、前もって決めておくことによるか、または反射点が存在しなかった場合に測定されることにより、バックグラウンド参照表面62の存在および位置が知られても良い。典型的には、参照表面62は、対象物51が置かれている地面またはフロアレベルであるかもしれない。一度体積が測定されると、検知された反射点53および参照表面62から測定された表面61により定められた対象物に対して、重量もまた見積もられるかもしれない。これは、既知の対象物の密度が与えられると、簡単な計算である。
【0065】
本発明の実施形態では、送信された信号に用いられている電磁波の波長は、1−100GHzの波長領域にある。この領域の中の範囲では、多くのタイプの物質は、透明または半透明である。そのような物質の例には、油のような液体、土、穀物の粒、およびいわゆるコークスである炭化石炭のような粒状の物質が含まれる。そのような物質に対しては、波が透過すると、第1の表面で1つめの反射が生じ、第2の表面で2つめの反射が生じる。そのようなシナリオの例が、対象物71が解析されている図7に模式的に示されている。対象物71は、対象物71に向いているアンテナユニット30により送信される波長の放射に半透明である。対象物71は、バックグラウンド表面72の上か、またはバックグラウンド表面72から離れて置かれていても良い。図7では、簡単のために、1方向の測定のみが示されている。一方、視野75の主視線に関して120度までであるかも知れないところの、アンテナユニットの全ビーム角度において同時にコヒーレント波を送信するために、等方性アンテナが好ましく用いられるということが、上述したことから理解されるべきである。本発明の位置決め処理では、視野75の主視線から角度αにおいて、送信波が、対象物71に最初に衝突する位置を表している第1の反射点73が検知されて位置決めされる。再度簡単のために、角度αは主視線を横断する1次元のみにおいて示されている。反射点73は、上述したように概説した方法に従って位置決めされる。しかしながら、対象物71の表面もまた送信された信号の放射に透明なので、反射点73で対象物に衝突した放射の一部分は、破線で示されているように、対象物71の中を通り続ける。第1の表面部分における反射率は、強度が(n1−n0)/(n0+n1)に比例する。ここで、n0は対象物の前の媒体、典型的には空気、の屈折率を表し、n1は、問題となっている周波数に対する対象物71の屈折率を表す。対象物71の中を通って伝播した後、新たな反射点74が放射の一部分を、再び屈折率のずれに依存して、反射する。また3番目の反射が、参照またはバックグラウンド表面72、図面には示されていないが、から得られるかもしれない。
【0066】
本発明に対する様々な用途が、図9−15を参照して、以下に述べられる。これらの用途の実施形態において、位置、表面、体積、質量等を定めるための計算は、図1に示すように、制御ユニットまたはコンピュータ5により実行されることが好ましい。そのような制御ユニットの実際の実施形態は、ここではこれ以上詳細には述べないが、そのような制御ユニットの一実施形態は、各ケースにおいて図8を参照して説明された理論に基づいているが、程度の差はあれ各実施形態に対して特異的であるように計算を実行するように工夫されている、マイクロプロセッサシステムおよびプログラムコードを備えたコンピュータである。実際の計算が、信号ジェネレータを制御するコンピュータ5において実行される必要がないということにもまた留意すべきである。しかし、実際の計算が、コンピュータ5が通信可能に接続されている他の制御ユニットにおいて行われても良い。
【0067】
図9は、船のような貨物ベッセルにおいて、本発明に対する用途の実施形態を示している。船体91の内部には、1つまたはそれ以上の貨物空間92が設けられている。図9は、水93の上に運ばれている海上船舶90を示しているが、説明される実施形態は、飛行機またはヘリコプタのような、エア・ベッセルに等しく適用される。貨物空間92は、様々な種類の貨物94、および特に大きな容積の液体または粒子状物質、を輸送するために用いられるかも知れない。例として、油、および石炭、鉱石、コークス、くず鉄等の他の液状物質が含まれる。そのようなルーズな貨物に関する問題は、船舶の動きまたは貨物の下手な荷積みのために、貨物空間の内部で浮いたりまたは横滑りしたりするかもしれないということである。図10に示されるように、いつか、ルーズな貨物の中心をかなり外れた位置ずれが、船舶の傾きをもたらすかもしれない。水93または空気の中において、最適な位置から少しでもずれることは、燃料消費の増加をもたらすと共に、最終的に危険であるかもしれない。
【0068】
本発明の実施形態では、この問題が、図1−8を参照して上述した、貨物空間92における貨物94に向けたアンテナ95を備えることにより克服される。このアンテナ95は、図8を参照して述べられた方法を用いて多数の反射点の位置を定めるための装置の一部を形成する。アンテナ95は、貨物空間92の天井の近くに配置されており、少なくとも側壁の所定の高さまで貨物空間をカバーする視野をアンテナに与えるアンテナパッチが設けられていることが好ましい。図では、視野は2点鎖線で示されている。アンテナ95は、貨物の上側表面の現在の形状および位置が判断できるような、ディスプレイまたはオペレータへのデータ出力を備えた監視システムとつながっていることが好ましい。アンテナは、貨物の上側表面96における多数の反射点の位置の測定のための装置につながっていることが好ましい。この装置は、更に、図5および6を参照して述べられた本発明に対応して、上記多数の反射点の測定された位置に適合する表面の3次元表示を生成するように工夫されている。アンテナは貨物空間に関して固定されているので、文字通り貨物空間の壁という、貨物のバックグラウンドの位置および形状は、良く分かっている。更に、貨物物質94の組成もまた、通常少なくとも大まかには分かっている。既知のバックグラウンド、測定された表面の位置と形状、および貨物94の物質の密度についての情報は、監視システムにおいて用いても良い。バックグラウンドに対して測定された表面を積分することにより、貨物94のボリュームの寸法および形状が計算でき、これにより、また貨物空間92における貨物94の質量中心の位置が計算できる。密度の情報を用いることにより、貨物に対する全質量もまた計算できるので、傾斜パラメータを、計算された全質量および質量中心97の位置から決めることができる。傾斜パラメータは、例えば、船舶に対する質量中心への距離パラメータおよび貨物質量に対する大きさパラメータを含む、貨物の質量によりもたらされる傾斜力の尺度として与えられても良い。本発明の実施形態では、傾斜パラメータが計算されて、該傾斜パラメータがプリセット値を超えた時に、監視システムが警告または情報の出力を発するように取り決められている。これは、貨物を積み込む間にまたは航海中に監視システムのオペレータに警告するために用いられても良く、また貨物を再配置するための決定根拠として用いられても良い。
【0069】
図11は、地面を突き抜けるレーダ(GPR)として用いられた場合の本発明に対する用途の実施形態を示している。GPRシステムは、地面の下の対象物を位置づけるために、様々な目的のために用いられる。パイプ、タンクおよびドラムの位置、地質学の研究、墓の調査および考古学の調査といった様々な分野の用途が含まれる。通常、低いレーダ周波数が、高い周波数よりも、地面の中により深く突き抜けるための使用に適している。与えれた範囲のGPR調査を行うための標準的な手順は、そりで運ばれた、基本的には1次元ビームを有する、レーダを用いることと、範囲全体に亘って該そりをあちこちにひきずることである。処理中に捕らえられたレーダの応答は、地下のイメージを生成するために、その後レーダそりによりたどられた経路の情報と結合される。この先行技術は、扱いにくく、時間がかかり、平らでない表面にあまり適合しないという点において、いくつかの欠点がある。更に、そりの経路は、正確なイメージを得るために注意深く制御される必要がある。
【0070】
図11の実施形態では、図1−8を参照して上述のように説明されたアンテナ111を用いることにより、これらの欠点を克服するGPRシステムが提供される。このアンテナ111は、図8を参照して述べられた方法に従い操作されて、多数の反射点の位置を定めるための装置の一部を形成する。アンテナは、高い位置で、支持構造113上で、持ち上げ装置112、例えばクレーンまたはキャタピラ(登録商標)、により運ばれる。アンテナ111の位置は、そのように、該アンテナを運ぶ支持構造113の位置に直接連結されている。この支持構造113は、伝統的な三角測量技術を用いるか、またはキャタピラ(登録商標)112のGPS受信器(図示せず)により読み出されたGPSデータを用いて、位置決めされても良い。アンテナ111の視野(FOV)は、該アンテナのアンテナ要素またはパッチの設計により決められる。現在の所、本発明のアンテナは、120度までのFOVを備えて製造されている。理論的には、地面114の上方約5メートルにキャタピラ(登録商標)112により持ち上げられているようなアンテナ111が、図11によるシステムにおいて用いられた場合、アンテナは230m2に亘る表面の領域をカバーする。10メートル上方に位置した時は、理論上の被覆率は約1000m2である。実際には、持ち上げ装置112としての運搬装置の前の地面をさらすために、図に示されているように、支持構造113を上下に動かすことが都合が良い。図7を参照して、およびより詳細には体積Wにおける測定の用途のために図8を参照して、一般論として上述した処理を用いる場合、地面を突き抜けるレーダシステムおよび方法は、地下の特徴115を探知するために提供される。このようなソリューションの長所は、アンテナによりカバーされる範囲の全体のイメージが、アンテナを動かす必要がなく、一斉に描かれることである。これは、簡単な手順の結果であり、この手順はまた、全体の範囲に対して1つの位置決めステップだけがなされることが必要であるため、測定誤差にあまり敏感ではない。
【0071】
図12は、本発明が産業用ロボット121に対する位置決めおよび案内手段として用いられた時の、本発明に対する用途の実施形態を示している。ロボット121は、固定ベース122、および1つまたはそれ以上のリンケージアーム123とピボットポイント124,125,126とを備えた可動な操作機構を有している。ロボットヘッド127は、ロボットの前方の端の部分に結合されている。ロボットヘッド127は、良く知られた2,3のオプションを挙げると、例えばグリッピングツール、溶接ツール、組み立てツールを持ち運んでいても良い。ロボット121は、組み立てライン上の装置のような、いくつかの対象物(図示せず)の形態において、操作に用いられる。この対象物は、ロボットベース122に対して静止しているかまたは動いていても良い。適切に働きおよびその仕事を行うために、ロボットは、特にロボットヘッド127は、正確に位置決めされる必要がある。
【0072】
図12の実施形態によれば、この目的のための位置決めシステムは、図1−8を参照して上述したアンテナ128を含んでいる。このアンテナ128は、図8を参照して述べられた方法に従い操作されて、多数の反射点の位置を定めるための装置の一部を形成する。図に示す一実施形態では、アンテナ128は、ロボットにより持ち運ばれており、該アンテナ自身に対して、多数の反射点129をさらして位置決めするために用いられる。本発明の位置測定方法は、反射点に対して3次元的位置を計算するように工夫されているので、しっかりと空間における対象物の位置を決めるためには、対象物に固定されている2つの反射点129で、理論的には十分である。アンテナ128は、ロボットヘッド127に関して所定の位置に固定されている。従って、アンテナ128と反射点129との間の相対位置が一度定まると、ロボットヘッド127に対する反射点129の相対位置もまた定めることが可能である。ロボット121により操作される対象物上の反射点129を定めることにより、上述したように反射点の位置を定めるためにアンテナおよび装置を用いて対象物の位置が定められる。その後、ロボットヘッド127が、対象物に近づくために制御されて向けられるかもしれない。
【0073】
反射点は、バックグラウンドのノイズレベルから識別される必要があり、従ってアンテナ128の視野の中で捕捉されたすべてのピクチャの中で見つけられる必要がある。対象物上の明確な場所の上にレーダターゲットを使用することが、これを行う1つの方法である。このレーダターゲットは、通常ボート上に用いられるレーダターゲットと同様のキューブ・コーナ(コーナ・レフレクタ)・ターゲットである。
【0074】
図12の実施形態の変形例では、アンテナ128は、ロボットから離れているか、またはロボットヘッド127に関して位置が固定されていないが、固定ベース122に関しては位置が固定されているロボット121の一部に設けられていても良い。アンテナ128は、更に反射点129を持ち運んでいる対象物をさらして位置決めをするために用いられる。一方で、ロボットヘッド127の位置は、ロボットベース122の固定された位置およびロボット操作機構の相対的な設定から分かる。その後、ロボットに対する制御システムが、ロボットヘッド127の動きを制御するために、アンテナ128により定められた対象物に対する位置情報を用いるかも知れない。
【0075】
図13は、本発明が車に対する位置決めおよび案内手段として用いられた時の、本発明に対する用途の実施形態を示している。多くの産業上の用途において、組み立て工程と倉庫の間のような、異なる工程間で物を移動するために、自動トラックまたは他のタイプのモータのついた運搬プラットフォームが用いられている。そのような産業上の用途の例には、大きな紙のロールが自動化された運搬車上で運送される、製紙産業および印刷オフィスが含まれる。図13は、そのような車131を示している。該車131は、運転および操縦の手段132により制御される車輪を有する。この手段132は、エンジン、典型的には電気エンジン、を備えている。プラットフォーム133は、運送される物134を積み込むことに対して使用可能である。車を案内するための先行技術のソリューションには、フロアの下に組み込まれたワイヤおよび信号ラインに関して車の位置を定めるための車のセンサ手段のような、信号ラインの形成が含まれる。
【0076】
図13の実施形態によれば、この目的のために、代わりの位置決めシステムは、図1−8を参照して上述したアンテナ135を含んでいる。このアンテナ135は、図8を参照して述べられた方法に従い操作されて、多数の反射点136に対する位置を定めるための装置の一部を形成する。アンテナ135は、車131により運ばれて、アンテナ自身に関して多数の反射点136をさらして位置決めをするために用いられる。反射点は、所定の位置に固定されているので、位置決めの手順それ自体は、車131の位置を定めるために働く。図12を参照して述べられたように工夫されている反射点は、天井にまたは天井の近くに位置しており、互いに間隔を空けていることが好ましい。各2つの反射点の間の間隔は、アンテナ135の視野が常に少なくとも2つの反射点をカバーするように選ばれる。一実施形態では、同じ反射点が、常に車131のすべての操作範囲中にアンテナ135によりカバーされるように支持される。もっと広い操作範囲に対しては、車が、カバーする異なるサブセットの間を進むように工夫されているような、多数の反射点を提供する必要があるかも知れない。このサブセットは、2つまたはそれ以上の反射点からなる。そのような実施形態では、車を運転および案内するためのシステムは、レーダアンテナ135によりどのサブセットが現在照射されているのかを知るために、採用される必要がある。またこのシステムは、多数の反射点の位置を定めるための装置を含む。各2つの隣接する反射点の間に固有の間隔を用いることが、これを達成するための1つの方法である。反射点への方向、距離および角度が、上述した方法を用いて定められて、2つのさらされた反射点の間の距離の測定もまた計算される。2つの反射点の間の定められた距離を、所定の間隔の情報と比較して、どの2つの反射点がさらされているのかを一意的に特定する。2つのさらされた反射点のみを備えた簡単なケースに対しては、本当にアンテナ135および車131に対して2つの異なる点がある。車131は、同じ応答を与えるかもしれない。間隔を注意深く選ぶことにより、少なくとも3つの反射点が常にさらされることを保証することが、これを克服する1つの方法である。車を運転および案内するためのシステムの論理フィルタにおいて、2つ位置の選択の内の1つを単に除外することが、これを克服する他の方法である。この方法は、2番目の可能な位置が、車の意図している経路に無関係である時に用いられるかもしれないが、車がその2番目の可能な位置に存在しない理由はない。
【0077】
図14は、本発明が炉140内のスラグ表面141を監視するために用いられた時の、本発明に対する用途の実施形態を示す。転換炉、レイドル、アーク炉および他の治金炉において、スラグ表面141、およびまた任意的にスラグおよびその下の液体金属144との間の接触面143の正確な位置を知る必要がある。干渉分光法を用いて、スラグ表面の位置を測定するための方法が知られている。例えば、本用途の発明者へ発行された米国特許第5629706号がある。しかしながら、それおよび他のソリューションは、基本的に1次元であり、それ自体は、スラグ表面141の1点において、該スラグ表面141および金属表面143の垂直位置を測定するように工夫されている。しかしながら、炉内の金属の領域に関する問題は、一様でないかまたは非対称に溶けていることである。そのようなシナリオが、スラグ表面141および金属表面143が右側よりも炉140の左側において大きく高くなっている図15に模式的に示されている。これは、炉の壁に深刻なダメージを及ぼす左側のホットスポットにつながり、最終的には壁を通して燃焼する。
【0078】
図14および15の実施形態によれば、図1−8を参照して上述したアンテナ145を含む位置決めシステムを用いて、そのような非対称な溶解物144が生じる可能性が監視される。このアンテナ145は、図8を参照して述べられた方法に従い操作されて、多数の反射点の位置を定めるための装置の一部を形成する。図8に関連して、体積Wは、本実施形態では、表面141、143および炉の壁との間に定められるスラグ体積142である。位置決めシステムは、図6に似たスラグ表面141の3次元表示を提供するように動作する。この3次元表示は、炉のオペレータへ画面上に映し出されるかも知れない。代わりに、炉に対する警告システムが、3次元表示の位置データとプリセットレベルの値との間の比較を行うために用意されていて、もし比較の結果として上記位置データが上記レベルの値を超える場合には、警告信号を発するように工夫されていても良い。スラグ表面141の周辺が炉の壁の周囲で変化する端の値の中で計算すること、およびこの値を所定の変位基準と比較することが、これを行う1つの方法である。本発明により、スラグ表面の全体に亘る位置の測定が、1つの固定されたアンテナ145を用いて達成される。
【0079】
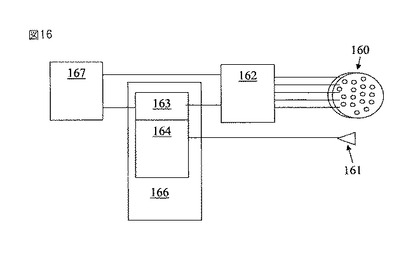
実験配置
図16に特定されるように、上述した方法を確認するために実験を配置することができる。基板160上のパッチから形成された多数のアンテナ要素が、各アンテナがスイッチのセットの入力へ接続されるように、スイッチシステム162へ接続されている。このスイッチシステムは、個々のアンテナが選択されるように、コンピュータ166へ接続されている。スイッチシステムの出力は、どのアンテナも常に受信器に接続できるように、受信器163へ接続されている。また1つのアンテナ161が、送信器164へ接続されている。このアンテナ161は、基板160上のパッチとして好ましくは含まれているが、簡単のため離れた要素として示されている。送信器および受信器は、ネットワークアナライザ、例えばWiltron360B VNA、である。ネットワークアナライザ機器は、周波数帯に亘って周波数をステップ状に、例えば11GHzから12GHzへ501ステップで、好ましくは等間隔で、変化させる。各周波数ステップに対して、各受信アンテナはスイッチが入れられて、周波数ごとに各アンテナ要素に対して、送信された信号が受信された信号により除されて、データがコンピュータに記録される。
【0080】
代わりに、各アンテナ要素に受信器が供給されていても良い。そして、すべての受信器は、コヒーレントな干渉システムを形成するために、共通の周波数標準に位相が固定されていなければならない。そして、データは、一斉に記録される。
【0081】
その後、データは、各受信アンテナに対して、周波数から遅延時間へフーリエ変換される。各アンテナへのデータは、インターフェロメータの光学中心からのオフセットのために、位相がずれている。その後、ベースラインが、遅延チャンネルごとに各アンテナ対に対して複素共役乗算を行うことにより再構成される。その後、2次元のフーリエ変換が、ベースライン座標から角度座標へ変換するために、遅延チャンネルごとのすべてのベースライン対に亘って行われる。新しいデータキューブは、同心球上の2次元角度として、3次元インターフェロメータ応答を含んでいる。その後、座標系は、データキューブをより良く表示するために、直角座標系へ変換することができる。
【図面の簡単な説明】
【0082】
【図1】図1は、位置を定めるために、本発明の実施形態に従って、1つまたはそれ以上の反射点の位置を定めるための装置のシステム配置を模式的に示す。
【図2】図2は、本発明の実施形態に従って、アンテナユニットの実施形態を模式的に示す。
【図3】図3は、本発明の実施形態に従ったアンテナを用いて、極座標における中心を外れたターゲット位置の位置決めを模式的に示す。
【図4】図4は、図3によるアンテナを通る平面の射影における、中心を外れたターゲットの位置決めを模式的に示す。
【図5】図5は、本発明の実施形態に従って、3次元表面上の多数の反射点の位置決めを模式的に示す。
【図6】図6は、本発明の実施形態に従って、探知された反射点から表面の表示の生成を模式的に示す。
【図7】図7は、本発明の実施形態に従って、3次元対象物上の深さにおける2つの反射点の位置決めを模式的に示す。
【図8】図8は、本発明の実施形態に従ったアンテナを用いて、直角座標を用いた表面に関する位置の測定を模式的に示す。
【図9】図9は、貨物船における使用に対して、1つまたはそれ以上の反射点の位置の測定に対する装置の利用を模式的に示す。
【図10】図10は、貨物船における使用に対して、1つまたはそれ以上の反射点の位置の測定に対する装置の利用を模式的に示す。
【図11】図11は、地面を突き抜けるレーダシステムを用いて、1つまたはそれ以上の反射点の位置の測定に対する装置の利用を模式的に示す。
【図12】図12は、産業用ロボットと共に用いた、1つまたはそれ以上の反射点の位置の測定に対する装置の利用を模式的に示す。
【図13】図13は、車両の位置決めおよび案内の目的に対して、1つまたはそれ以上の反射点の位置の測定に対する装置の利用を模式的に示す。
【図14】図14は、炉内のスラグ表面を監視する目的に対して、1つまたはそれ以上の反射点の位置の測定に対する装置の利用を模式的に示す。
【図15】図15は、炉中のスラグ表面を監視する目的に対して、1つまたはそれ以上の反射点の位置の測定に対する装置の利用を模式的に示す。
【図16】図16は、ベクトル・ネットワーク・アナライザを用いた典型的な実験配置を模式的に示す。
【符号の説明】
【0083】
1 信号ジェネレータ
2 パワースプリッタ
3 送信アンテナ
4 受信アンテナ
5 位相比較ユニット
6 コンピュータ
30 アンテナユニット
【特許請求の範囲】
【請求項1】
送信アンテナと、主視線の方向と垂直に離れている多数の受信アンテナとを用いて、反射点に対して空間における位置を定めるための方法において、
前記反射点に向けて、コヒーレントな電磁波信号を送信するステップと、
前記送信された信号と、受信アンテナにおいて受信された前記反射点から反射された信号との間の位相差を検知するステップと、
周波数帯に亘る多数の周波数ステップにおいて、前記送信および前記受信のステップを繰り返すステップと、
信号周波数に依存する位相差の変動を測定することにより、前記反射点への距離(r)を定めるステップと、
少なくとも2つの受信アンテナにおける前記反射点から反射された信号の受信間の遅延と、該少なくとも2つの受信アンテナ間の既知の間隔とに依存して、前記受信アンテナから前記反射点への視線と前記主視線との間の角度(φ、θ)を特定するステップとを備えている方法。
【請求項2】
前記送信された信号と前記受信された信号とを結合するステップと、
前記結合された信号のフーリエ変換を行うステップと、
位相差を検知して、周波数領域における遅延を定めることを行うステップとを備えている請求項1に記載の方法。
【請求項3】
角度を特定する前記ステップが、
前記少なくとも2つの受信アンテナにおいて受信された前記信号を集合受信信号に結合するステップと、
前記集合受信信号から、前記少なくとも2つの受信アンテナにおける前記反射点から反射された信号の受信間の前記遅延を定めるステップと、
前記定められた遅延および前記既知の間隔に基づいて、前記角度を計算するステップ
とを備えている請求項1に記載の方法。
【請求項4】
反射された信号の受信間の前記遅延を定める前記ステップが、
前記受信された信号間の前記位相差を定めるステップを備えている請求項3に記載の方法。
【請求項5】
少なくとも1つの受信アンテナにおいて受信された信号の振幅変動を検知するステップと、
前記振幅変動を限界基準と比較するステップと、
前記比較に基づいて反射点の存在を特定するステップとを備えている請求項1に記載の方法。
【請求項6】
ある立体角を一斉にさらすために、等方性送信アンテナを用いるステップと、
前記立体角と前記受信アンテナの視野とが重なる中で、多数の反射点への前記距離および前記角度を定めるステップとを備えている請求項1に記載の方法。
【請求項7】
角度を特定する前記ステップが、
前記少なくとも2つの受信アンテナにおいて受信された反射された信号、を集合受信信号に結合するステップと、
前記既知の間隔に依存する、前記反射された信号の前記受信アンテナへのある入射角度、を表している、前記少なくとも2つの受信アンテナ間の遅延、を選択するステップと、
前記少なくとも2つの受信アンテナ間の前記遅延の関数として、前記集合受信信号における振幅変動を検知するステップと、
前記振幅変動を限界基準と比較するステップと、
前記比較に基づいて反射点の存在を特定するステップとを備えている請求項1に記載の方法。
【請求項8】
受信の前記遅延および前記少なくとも2つの受信アンテナ間の前記既知の間隔に依存して、前記特定された反射点への前記入射角度を特定するステップを備えている請求項7に記載の方法。
【請求項9】
前記多数の反射点の前記位置の3次元表示を生成するステップを備えている請求項6に記載の方法。
【請求項10】
前記多数の反射点の定められた位置に適合する表面の3次元表示を生成するステップを備えている請求項6に記載の方法。
【請求項11】
前記表面により定義される体積を定めるために、該表面の前記3次元表示を積分するステップを備えている請求項10に記載の方法。
【請求項12】
対象物に向けて前記送信信号を方向づけるステップと、
前記対象物の外側表面の反射点において反射された、受信された信号を検知するステップと、
前記外側表面を通過して、前記対象物の該外側表面の下にある下方の反射点において反射された、受信された信号を検知するステップと、
前記下方の反射点の位置を定めるステップを備えている請求項6に記載の方法。
【請求項13】
前記外側表面を通過して、前記対象物の該外側表面の下にある多数の下方の反射点において反射された、受信された信号を検知するステップと、
前記多数の下方の反射点の位置を定めるステップと、
前記多数の下方の反射点の前記位置に適合する下方の表面の3次元表示を生成するステップを備えている請求項12に記載の方法。
【請求項14】
前記下方の表面により定義される体積を定めるために、該下方の表面の前記3次元表示を積分するステップを備えている請求項13に記載の方法。
【請求項15】
前記送信アンテナを、また複数の前記受信アンテナの1つとして用いるステップを備えている請求項1に記載の方法。
【請求項16】
貨物ベッセルの貨物空間に、前記送信アンテナおよび前記受信アンテナを用意するステップと、
前記貨物空間に存在する貨物の表面において、多数の反射点の位置を定めるステップと、
前記多数の反射点の前記定められた位置に適合する表面の3次元表示を生成するステップと、
貨物監視システムに前記3次元表示を提供するステップとを備えている、貨物監視用途において用いられる請求項1から15の何れか1項に記載の方法。
【請求項17】
前記貨物の体積表示を提供するために、表面の前記3次元表示を、前記貨物空間の壁に対して積分するステップを備えている請求項16に記載の方法。
【請求項18】
前記貨物に対する前記体積表示および密度の値を用いて、該貨物の質量を定めるステップを備えている請求項17に記載の方法。
【請求項19】
前記体積表示に対する重心の位置を計算するステップと、
前記貨物の質量により与えられる傾斜力を表す傾斜パラメータを計算するステップとを備えている請求項18に記載の方法。
【請求項20】
前記傾斜パラメータをプリセット値と比較するステップと、
前記傾斜パラメータが前記プリセット値を超えた時に、警告または情報の出力を発するステップとを備えている請求項19に記載の方法。
【請求項21】
支持構造に、前記送信アンテナおよび前記受信アンテナを配置するステップと、
前記支持構造を上方に持ち上げて、前記送信アンテナを地面の領域に向けるステップと、
前記地面の下に存在する多数の反射点の位置を定めるステップと、
前記反射点の3次元表示を生成するステップとを備えている、地面を突き抜ける用途において用いられる請求項1から15の何れか1項に記載の方法。
【請求項22】
可動な操作機構に接続された固定ベースを有する産業用ロボットを用意するステップと、
前記ロボットに接続された前記送信アンテナおよび前記受信アンテナを配置するステップと、
前記ロボットにより操作される対象物上の多数の反射点の位置を定めるステップと、
前記定められた位置に依存して、前記操作機構のロボットヘッドの動きを制御するステップとを備えている、ロボットを案内する用途において用いられる請求項1から15の何れか1項に記載の方法。
【請求項23】
前記送信アンテナおよび前記受信アンテナを、前記ロボットヘッドに固定した関係で配置するステップを備えている請求項22に記載の方法。
【請求項24】
前記送信アンテナおよび前記受信アンテナを、前記固定ベースに固定した関係で配置するステップと、
前記固定ベースに関して、前記ロボットヘッドの相対位置を定めるために、前記操作機構の動きを監視するステップと、
前記定められた位置および前記操作機構の前記動きに依存して、ロボットヘッドの動きを制御するステップとを備えている請求項22に記載の方法。
【請求項25】
運転および操縦の手段を有する車を用意するステップと、
前記車に接続された前記送信アンテナおよび前記受信アンテナを配置するステップと、
前記車の周囲における多数の反射点の位置を定めるステップと、
前記定められた位置に依存して、前記運転および操縦の手段を制御するステップとを備えている、車を位置決めする用途において用いられる請求項1から15の何れか1項に記載の方法。
【請求項26】
前記反射点の位置間の距離を定めるステップと、
隣接する反射点間の距離に基づいて反射点を特定するステップと、
前記特定された反射点に対する真実の位置データを導出するステップと、
前記反射点の前記真実の位置および前記送信アンテナに関する前記反射点の前記定められた位置に依存して、前記車に対する位置を定めるステップとを備えている請求項25に記載の方法。
【請求項27】
スラグ表面を有するスラグ層により覆われている溶解物が入っている炉を用意するステップと、
前記炉に関して既知の位置に、前記送信アンテナおよび前記受信アンテナを配置するステップと、
前記スラグ表面における多数の反射点の位置を定めるステップと、
前記スラグ表面の3次元表示を提供するステップと、
前記3次元表示に基づいて前記スラグ表面の形状または位置を監視するステップとを備えている、炉内におけるスラグ表面を監視するための用途において用いられる請求項1から15の何れか1項に記載の方法。
【請求項28】
ディスプレイ上に前記3次元表示のイメージを示すステップを備えている請求項27に記載の方法。
【請求項29】
前記3次元表示の位置データを現在のレベルの値と比較するステップと、
前記位置データが前記レベルの値を超える場合には、警告信号を発するステップとを備えている請求項27に記載の方法。
【請求項30】
反射点に対する空間における位置を定めるための装置において、
決められた周波数で電磁波信号を生成するように工夫された信号ジェネレータと、
生成されたコヒーレントな電磁波を送信するように工夫された送信アンテナと、主視線の方向と垂直に既知の間隔で分離されており且つ前記送信された波の反射された一部を受信するように工夫されている、多数の受信アンテナとを含むアンテナユニットと、
前記送信アンテナおよび前記受信アンテナに接続された位相比較手段と、
少なくとも2つの受信アンテナ間の検知された位相差と、該少なくとも2つの受信アンテナ間の間隔とから反射点への角度を計算する動作が可能で、且つ前記周波数に依存する、前記送信アンテナと前記受信アンテナとの間の検知された位相差から前記反射点への距離を計算する動作が可能な、前記位相比較手段に接続された制御ユニットとを備えている装置。
【請求項31】
更に、周波数帯に亘る多数の周波数ステップで前記電磁波信号を生成するように工夫されている、前記信号ジェネレータに接続された周波数ステッピング機能、を備えており、
前記周波数ステップに亘り、前記送信アンテナと受信アンテナとの間の前記位相差の検知された変化から、前記反射点への距離を計算するように、前記制御ユニットが工夫されている請求項30に記載の装置。
【請求項32】
前記送信アンテナおよび前記受信アンテナは、前記生成されたコヒーレントな電磁波が全体の場または対象物をカバーして送信されるような、大きなビーム幅パターンを有している請求項30に記載の装置。
【請求項33】
前記ビーム幅パターンが、0−120度の全視野角度を示す請求項32に記載の装置。
【請求項34】
更に、コンピュータシステムおよびコンピュータプログラムコード手段を備えており、実行されると、該コンピュータシステムが、請求項1から29の何れか1項に記載のステップを実行するようになされている請求項30に記載の装置。
【請求項35】
請求項32に記載の装置を備えた、物体の体積を定めるためのシステムであって、
前記アンテナユニットは、該アンテナの位置から、前記物体の全体を一斉に照射するために、該物体からある距離を置いて配置されており、前記制御ユニットが、前記対象物の表面における多数の反射点の位置を定めるように工夫されており、更に前記多数の反射点の該定められた位置に適合する表面の3次元表示を生成するための手段、および該表面により定められる体積を定めるために、該表面の前記3次元表示を積分する手段を備えているシステム。
【請求項36】
請求項32に記載の装置を備えた、地下の特徴のイメージを生成するためのシステムであって、
前記アンテナユニットが、地面のある領域を一斉に照射するために、持ち上げ手段により高い位置に保持されるように配置されており、前記制御ユニットが、地面の下に位置している多数の反射点の位置を定めるように工夫されているシステム。
【請求項37】
前記制御ユニットが、地面の下の多数の反射点の位置を定めるように工夫されており、更に該多数の反射点の位置の3次元表示を生成するための手段を備えている請求項36に記載のシステム。
【請求項38】
請求項32に記載の装置を備えた、貨物ベッセルの貨物空間を監視するためのシステムであって、
前記アンテナユニットが、貨物を保持するために工夫されている貨物空間へ向けられており、前記制御ユニットが、前記貨物空間に置かれた貨物の表面における多数の反射点の位置を定めるように工夫されており、更に該多数の反射点の定められた位置に適合する表面の3次元表示を生成するための手段を備えており、該制御ユニットは、前記3次元表示を提供するために、貨物監視システムへ通信可能に接続されるように配置されているシステム。
【請求項39】
前記貨物の体積表示を提供するために、前記表面の前記3次元表示を、前記貨物空間の壁に対して積分するための手段を備えている請求項38に記載のシステム。
【請求項40】
前記体積表示および前記貨物の密度の値を用いて、該貨物の質量を定めるための手段を備えている請求項39に記載のシステム。
【請求項41】
前記体積表示に対する重心の位置を計算するための手段と、
前記貨物ベッセル上の前記貨物の前記質量により与えられる傾斜力を表す傾斜パラメータを計算するための手段と備えている請求項40に記載のシステム。
【請求項42】
前記傾斜パラメータをプリセット値と比較するための手段と、
前記傾斜パラメータが前記プリセット値を超えた時に、警告または情報の出力を発するための手段とを備えている請求項41に記載のシステム。
【請求項43】
請求項32に記載の装置を備えた、炉内のスラグ表面を監視するためのシステムであって、
前記アンテナユニットが、前記炉に関して既知の位置に配置されており、且つスラグ表面を有するスラグ層により覆われている溶解物が入っている該炉の内側の部分に向けられており、前記制御ユニットが、前記スラグ表面における多数の反射点の位置を定めるように工夫されており、更に該スラグ表面の3次元表示を提供するための手段を備えているシステム。
【請求項44】
前記3次元表示のイメージを示すためのディスプレイを備えている請求項43に記載のシステム。
【請求項45】
前記3次元表示の位置データを現在のレベルの値と比較するための手段と、該位置データが前記レベルの値を超える場合には、警告信号を発するための手段とを備えている請求項43に記載のシステム。
【請求項46】
ロボットに接続された前記アンテナユニットを備えた請求項32に記載の装置を有し、ロボットヘッドを備えた可動な操作機構に接続された固定ベースを有するロボットを案内するためのシステムであって、
前記制御ユニットは、前記ロボットにより操作される対象物上の多数の反射点の位置を定めるように工夫されており、該定められた位置に依存して、前記操作機構の動きを制御するように工夫されているシステム。
【請求項47】
前記アンテナユニットが、前記ロボットヘッドに固定した関係で配置されている請求項46に記載のシステム。
【請求項48】
前記アンテナユニットが、前記固定ベースに固定した関係で配置されており、前記制御ユニットが、前記固定ベースに関して、前記ロボットヘッドの相対位置を定めるために、前記操作機構の動きを監視し、且つ該定められた位置および前記操作機構の前記動きに依存して、前記ロボットヘッドの動きを制御するように工夫されている請求項46に記載のシステム。
【請求項49】
請求項32に記載の装置を備えた、車の位置を決めるためのシステムであって、
前記アンテナユニットが前記車上で運ばれており、多数の反射点が該車の周囲における所定の位置に固定されており、前記制御ユニットが、前記アンテナユニットに関して、前記多数の反射点の少なくとも2つの相対位置を定め、且つ前記所定の位置および前記少なくとも2つの反射点に対する相対位置に依存して、前記車の位置を計算するように工夫されているシステム。
【請求項50】
前記車が運転および操縦の手段を備えており、前記制御手段が、前記車の前記定められた位置に依存して、更に前記運転および操縦の手段を制御するように工夫されている請求項49に記載のシステム。
【請求項51】
前記制御ユニットが、前記少なくとも2つの反射点の位置の間の距離を定め、且つ隣接する反射点間の距離に基づいて反射点を特定するように工夫されており、該制御ユニットは、更にメモリから前記特定された反射点に対する所定の位置データを読み出すように工夫されている請求項49に記載のシステム。
【請求項52】
決められた周波数でのコヒーレントな電磁波信号の送信、および空間におけるある位置での反射点からの反射された信号の受信のために工夫されているアンテナユニットにおいて、
送信アンテナと、前記アンテナユニットにおける主視線の方向と垂直に離れている多数の受信アンテナとを運ぶ支持構造を備えているアンテナユニット。
【請求項53】
前記受信アンテナが、前記支持構造上の面内に、前記主視線を定める該面と垂直な方向に分布している請求項52に記載のアンテナユニット。
【請求項54】
複数の前記受信アンテナの1つが、また送信アンテナである請求項52記載のアンテナユニット。
【請求項55】
前記送信アンテナおよび前記受信アンテナが、前記生成されたコヒーレントな電磁波が全体の場または対象物をカバーして送信されるような、大きなビーム幅パターンを有している請求項52に記載のアンテナユニット。
【請求項56】
前記ビーム幅パターンが、0−120度の全視野角度を示す請求項55に記載のアンテナユニット。
【請求項1】
送信アンテナと、主視線の方向と垂直に離れている多数の受信アンテナとを用いて、反射点に対して空間における位置を定めるための方法において、
前記反射点に向けて、コヒーレントな電磁波信号を送信するステップと、
前記送信された信号と、受信アンテナにおいて受信された前記反射点から反射された信号との間の位相差を検知するステップと、
周波数帯に亘る多数の周波数ステップにおいて、前記送信および前記受信のステップを繰り返すステップと、
信号周波数に依存する位相差の変動を測定することにより、前記反射点への距離(r)を定めるステップと、
少なくとも2つの受信アンテナにおける前記反射点から反射された信号の受信間の遅延と、該少なくとも2つの受信アンテナ間の既知の間隔とに依存して、前記受信アンテナから前記反射点への視線と前記主視線との間の角度(φ、θ)を特定するステップとを備えている方法。
【請求項2】
前記送信された信号と前記受信された信号とを結合するステップと、
前記結合された信号のフーリエ変換を行うステップと、
位相差を検知して、周波数領域における遅延を定めることを行うステップとを備えている請求項1に記載の方法。
【請求項3】
角度を特定する前記ステップが、
前記少なくとも2つの受信アンテナにおいて受信された前記信号を集合受信信号に結合するステップと、
前記集合受信信号から、前記少なくとも2つの受信アンテナにおける前記反射点から反射された信号の受信間の前記遅延を定めるステップと、
前記定められた遅延および前記既知の間隔に基づいて、前記角度を計算するステップ
とを備えている請求項1に記載の方法。
【請求項4】
反射された信号の受信間の前記遅延を定める前記ステップが、
前記受信された信号間の前記位相差を定めるステップを備えている請求項3に記載の方法。
【請求項5】
少なくとも1つの受信アンテナにおいて受信された信号の振幅変動を検知するステップと、
前記振幅変動を限界基準と比較するステップと、
前記比較に基づいて反射点の存在を特定するステップとを備えている請求項1に記載の方法。
【請求項6】
ある立体角を一斉にさらすために、等方性送信アンテナを用いるステップと、
前記立体角と前記受信アンテナの視野とが重なる中で、多数の反射点への前記距離および前記角度を定めるステップとを備えている請求項1に記載の方法。
【請求項7】
角度を特定する前記ステップが、
前記少なくとも2つの受信アンテナにおいて受信された反射された信号、を集合受信信号に結合するステップと、
前記既知の間隔に依存する、前記反射された信号の前記受信アンテナへのある入射角度、を表している、前記少なくとも2つの受信アンテナ間の遅延、を選択するステップと、
前記少なくとも2つの受信アンテナ間の前記遅延の関数として、前記集合受信信号における振幅変動を検知するステップと、
前記振幅変動を限界基準と比較するステップと、
前記比較に基づいて反射点の存在を特定するステップとを備えている請求項1に記載の方法。
【請求項8】
受信の前記遅延および前記少なくとも2つの受信アンテナ間の前記既知の間隔に依存して、前記特定された反射点への前記入射角度を特定するステップを備えている請求項7に記載の方法。
【請求項9】
前記多数の反射点の前記位置の3次元表示を生成するステップを備えている請求項6に記載の方法。
【請求項10】
前記多数の反射点の定められた位置に適合する表面の3次元表示を生成するステップを備えている請求項6に記載の方法。
【請求項11】
前記表面により定義される体積を定めるために、該表面の前記3次元表示を積分するステップを備えている請求項10に記載の方法。
【請求項12】
対象物に向けて前記送信信号を方向づけるステップと、
前記対象物の外側表面の反射点において反射された、受信された信号を検知するステップと、
前記外側表面を通過して、前記対象物の該外側表面の下にある下方の反射点において反射された、受信された信号を検知するステップと、
前記下方の反射点の位置を定めるステップを備えている請求項6に記載の方法。
【請求項13】
前記外側表面を通過して、前記対象物の該外側表面の下にある多数の下方の反射点において反射された、受信された信号を検知するステップと、
前記多数の下方の反射点の位置を定めるステップと、
前記多数の下方の反射点の前記位置に適合する下方の表面の3次元表示を生成するステップを備えている請求項12に記載の方法。
【請求項14】
前記下方の表面により定義される体積を定めるために、該下方の表面の前記3次元表示を積分するステップを備えている請求項13に記載の方法。
【請求項15】
前記送信アンテナを、また複数の前記受信アンテナの1つとして用いるステップを備えている請求項1に記載の方法。
【請求項16】
貨物ベッセルの貨物空間に、前記送信アンテナおよび前記受信アンテナを用意するステップと、
前記貨物空間に存在する貨物の表面において、多数の反射点の位置を定めるステップと、
前記多数の反射点の前記定められた位置に適合する表面の3次元表示を生成するステップと、
貨物監視システムに前記3次元表示を提供するステップとを備えている、貨物監視用途において用いられる請求項1から15の何れか1項に記載の方法。
【請求項17】
前記貨物の体積表示を提供するために、表面の前記3次元表示を、前記貨物空間の壁に対して積分するステップを備えている請求項16に記載の方法。
【請求項18】
前記貨物に対する前記体積表示および密度の値を用いて、該貨物の質量を定めるステップを備えている請求項17に記載の方法。
【請求項19】
前記体積表示に対する重心の位置を計算するステップと、
前記貨物の質量により与えられる傾斜力を表す傾斜パラメータを計算するステップとを備えている請求項18に記載の方法。
【請求項20】
前記傾斜パラメータをプリセット値と比較するステップと、
前記傾斜パラメータが前記プリセット値を超えた時に、警告または情報の出力を発するステップとを備えている請求項19に記載の方法。
【請求項21】
支持構造に、前記送信アンテナおよび前記受信アンテナを配置するステップと、
前記支持構造を上方に持ち上げて、前記送信アンテナを地面の領域に向けるステップと、
前記地面の下に存在する多数の反射点の位置を定めるステップと、
前記反射点の3次元表示を生成するステップとを備えている、地面を突き抜ける用途において用いられる請求項1から15の何れか1項に記載の方法。
【請求項22】
可動な操作機構に接続された固定ベースを有する産業用ロボットを用意するステップと、
前記ロボットに接続された前記送信アンテナおよび前記受信アンテナを配置するステップと、
前記ロボットにより操作される対象物上の多数の反射点の位置を定めるステップと、
前記定められた位置に依存して、前記操作機構のロボットヘッドの動きを制御するステップとを備えている、ロボットを案内する用途において用いられる請求項1から15の何れか1項に記載の方法。
【請求項23】
前記送信アンテナおよび前記受信アンテナを、前記ロボットヘッドに固定した関係で配置するステップを備えている請求項22に記載の方法。
【請求項24】
前記送信アンテナおよび前記受信アンテナを、前記固定ベースに固定した関係で配置するステップと、
前記固定ベースに関して、前記ロボットヘッドの相対位置を定めるために、前記操作機構の動きを監視するステップと、
前記定められた位置および前記操作機構の前記動きに依存して、ロボットヘッドの動きを制御するステップとを備えている請求項22に記載の方法。
【請求項25】
運転および操縦の手段を有する車を用意するステップと、
前記車に接続された前記送信アンテナおよび前記受信アンテナを配置するステップと、
前記車の周囲における多数の反射点の位置を定めるステップと、
前記定められた位置に依存して、前記運転および操縦の手段を制御するステップとを備えている、車を位置決めする用途において用いられる請求項1から15の何れか1項に記載の方法。
【請求項26】
前記反射点の位置間の距離を定めるステップと、
隣接する反射点間の距離に基づいて反射点を特定するステップと、
前記特定された反射点に対する真実の位置データを導出するステップと、
前記反射点の前記真実の位置および前記送信アンテナに関する前記反射点の前記定められた位置に依存して、前記車に対する位置を定めるステップとを備えている請求項25に記載の方法。
【請求項27】
スラグ表面を有するスラグ層により覆われている溶解物が入っている炉を用意するステップと、
前記炉に関して既知の位置に、前記送信アンテナおよび前記受信アンテナを配置するステップと、
前記スラグ表面における多数の反射点の位置を定めるステップと、
前記スラグ表面の3次元表示を提供するステップと、
前記3次元表示に基づいて前記スラグ表面の形状または位置を監視するステップとを備えている、炉内におけるスラグ表面を監視するための用途において用いられる請求項1から15の何れか1項に記載の方法。
【請求項28】
ディスプレイ上に前記3次元表示のイメージを示すステップを備えている請求項27に記載の方法。
【請求項29】
前記3次元表示の位置データを現在のレベルの値と比較するステップと、
前記位置データが前記レベルの値を超える場合には、警告信号を発するステップとを備えている請求項27に記載の方法。
【請求項30】
反射点に対する空間における位置を定めるための装置において、
決められた周波数で電磁波信号を生成するように工夫された信号ジェネレータと、
生成されたコヒーレントな電磁波を送信するように工夫された送信アンテナと、主視線の方向と垂直に既知の間隔で分離されており且つ前記送信された波の反射された一部を受信するように工夫されている、多数の受信アンテナとを含むアンテナユニットと、
前記送信アンテナおよび前記受信アンテナに接続された位相比較手段と、
少なくとも2つの受信アンテナ間の検知された位相差と、該少なくとも2つの受信アンテナ間の間隔とから反射点への角度を計算する動作が可能で、且つ前記周波数に依存する、前記送信アンテナと前記受信アンテナとの間の検知された位相差から前記反射点への距離を計算する動作が可能な、前記位相比較手段に接続された制御ユニットとを備えている装置。
【請求項31】
更に、周波数帯に亘る多数の周波数ステップで前記電磁波信号を生成するように工夫されている、前記信号ジェネレータに接続された周波数ステッピング機能、を備えており、
前記周波数ステップに亘り、前記送信アンテナと受信アンテナとの間の前記位相差の検知された変化から、前記反射点への距離を計算するように、前記制御ユニットが工夫されている請求項30に記載の装置。
【請求項32】
前記送信アンテナおよび前記受信アンテナは、前記生成されたコヒーレントな電磁波が全体の場または対象物をカバーして送信されるような、大きなビーム幅パターンを有している請求項30に記載の装置。
【請求項33】
前記ビーム幅パターンが、0−120度の全視野角度を示す請求項32に記載の装置。
【請求項34】
更に、コンピュータシステムおよびコンピュータプログラムコード手段を備えており、実行されると、該コンピュータシステムが、請求項1から29の何れか1項に記載のステップを実行するようになされている請求項30に記載の装置。
【請求項35】
請求項32に記載の装置を備えた、物体の体積を定めるためのシステムであって、
前記アンテナユニットは、該アンテナの位置から、前記物体の全体を一斉に照射するために、該物体からある距離を置いて配置されており、前記制御ユニットが、前記対象物の表面における多数の反射点の位置を定めるように工夫されており、更に前記多数の反射点の該定められた位置に適合する表面の3次元表示を生成するための手段、および該表面により定められる体積を定めるために、該表面の前記3次元表示を積分する手段を備えているシステム。
【請求項36】
請求項32に記載の装置を備えた、地下の特徴のイメージを生成するためのシステムであって、
前記アンテナユニットが、地面のある領域を一斉に照射するために、持ち上げ手段により高い位置に保持されるように配置されており、前記制御ユニットが、地面の下に位置している多数の反射点の位置を定めるように工夫されているシステム。
【請求項37】
前記制御ユニットが、地面の下の多数の反射点の位置を定めるように工夫されており、更に該多数の反射点の位置の3次元表示を生成するための手段を備えている請求項36に記載のシステム。
【請求項38】
請求項32に記載の装置を備えた、貨物ベッセルの貨物空間を監視するためのシステムであって、
前記アンテナユニットが、貨物を保持するために工夫されている貨物空間へ向けられており、前記制御ユニットが、前記貨物空間に置かれた貨物の表面における多数の反射点の位置を定めるように工夫されており、更に該多数の反射点の定められた位置に適合する表面の3次元表示を生成するための手段を備えており、該制御ユニットは、前記3次元表示を提供するために、貨物監視システムへ通信可能に接続されるように配置されているシステム。
【請求項39】
前記貨物の体積表示を提供するために、前記表面の前記3次元表示を、前記貨物空間の壁に対して積分するための手段を備えている請求項38に記載のシステム。
【請求項40】
前記体積表示および前記貨物の密度の値を用いて、該貨物の質量を定めるための手段を備えている請求項39に記載のシステム。
【請求項41】
前記体積表示に対する重心の位置を計算するための手段と、
前記貨物ベッセル上の前記貨物の前記質量により与えられる傾斜力を表す傾斜パラメータを計算するための手段と備えている請求項40に記載のシステム。
【請求項42】
前記傾斜パラメータをプリセット値と比較するための手段と、
前記傾斜パラメータが前記プリセット値を超えた時に、警告または情報の出力を発するための手段とを備えている請求項41に記載のシステム。
【請求項43】
請求項32に記載の装置を備えた、炉内のスラグ表面を監視するためのシステムであって、
前記アンテナユニットが、前記炉に関して既知の位置に配置されており、且つスラグ表面を有するスラグ層により覆われている溶解物が入っている該炉の内側の部分に向けられており、前記制御ユニットが、前記スラグ表面における多数の反射点の位置を定めるように工夫されており、更に該スラグ表面の3次元表示を提供するための手段を備えているシステム。
【請求項44】
前記3次元表示のイメージを示すためのディスプレイを備えている請求項43に記載のシステム。
【請求項45】
前記3次元表示の位置データを現在のレベルの値と比較するための手段と、該位置データが前記レベルの値を超える場合には、警告信号を発するための手段とを備えている請求項43に記載のシステム。
【請求項46】
ロボットに接続された前記アンテナユニットを備えた請求項32に記載の装置を有し、ロボットヘッドを備えた可動な操作機構に接続された固定ベースを有するロボットを案内するためのシステムであって、
前記制御ユニットは、前記ロボットにより操作される対象物上の多数の反射点の位置を定めるように工夫されており、該定められた位置に依存して、前記操作機構の動きを制御するように工夫されているシステム。
【請求項47】
前記アンテナユニットが、前記ロボットヘッドに固定した関係で配置されている請求項46に記載のシステム。
【請求項48】
前記アンテナユニットが、前記固定ベースに固定した関係で配置されており、前記制御ユニットが、前記固定ベースに関して、前記ロボットヘッドの相対位置を定めるために、前記操作機構の動きを監視し、且つ該定められた位置および前記操作機構の前記動きに依存して、前記ロボットヘッドの動きを制御するように工夫されている請求項46に記載のシステム。
【請求項49】
請求項32に記載の装置を備えた、車の位置を決めるためのシステムであって、
前記アンテナユニットが前記車上で運ばれており、多数の反射点が該車の周囲における所定の位置に固定されており、前記制御ユニットが、前記アンテナユニットに関して、前記多数の反射点の少なくとも2つの相対位置を定め、且つ前記所定の位置および前記少なくとも2つの反射点に対する相対位置に依存して、前記車の位置を計算するように工夫されているシステム。
【請求項50】
前記車が運転および操縦の手段を備えており、前記制御手段が、前記車の前記定められた位置に依存して、更に前記運転および操縦の手段を制御するように工夫されている請求項49に記載のシステム。
【請求項51】
前記制御ユニットが、前記少なくとも2つの反射点の位置の間の距離を定め、且つ隣接する反射点間の距離に基づいて反射点を特定するように工夫されており、該制御ユニットは、更にメモリから前記特定された反射点に対する所定の位置データを読み出すように工夫されている請求項49に記載のシステム。
【請求項52】
決められた周波数でのコヒーレントな電磁波信号の送信、および空間におけるある位置での反射点からの反射された信号の受信のために工夫されているアンテナユニットにおいて、
送信アンテナと、前記アンテナユニットにおける主視線の方向と垂直に離れている多数の受信アンテナとを運ぶ支持構造を備えているアンテナユニット。
【請求項53】
前記受信アンテナが、前記支持構造上の面内に、前記主視線を定める該面と垂直な方向に分布している請求項52に記載のアンテナユニット。
【請求項54】
複数の前記受信アンテナの1つが、また送信アンテナである請求項52記載のアンテナユニット。
【請求項55】
前記送信アンテナおよび前記受信アンテナが、前記生成されたコヒーレントな電磁波が全体の場または対象物をカバーして送信されるような、大きなビーム幅パターンを有している請求項52に記載のアンテナユニット。
【請求項56】
前記ビーム幅パターンが、0−120度の全視野角度を示す請求項55に記載のアンテナユニット。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2007−127639(P2007−127639A)
【公開日】平成19年5月24日(2007.5.24)
【国際特許分類】
【出願番号】特願2006−294262(P2006−294262)
【出願日】平成18年10月30日(2006.10.30)
【出願人】(506363816)アゲリス グループ アクティエボラーグ (2)
【Fターム(参考)】
【公開日】平成19年5月24日(2007.5.24)
【国際特許分類】
【出願日】平成18年10月30日(2006.10.30)
【出願人】(506363816)アゲリス グループ アクティエボラーグ (2)
【Fターム(参考)】
[ Back to top ]