
多点測定方法及び測量装置
【課題】多点を効率よく、高精度に測定可能であり、又測定後のデータ処理、管理を簡単、容易にする。
【解決手段】広角画像を取得する第1撮像部と前記広角画像より高倍率の望遠画像を取得する第2撮像部とを有する望遠鏡部5と、測距光を射出し測定対象物からの反射光を受光して測距を行う測距部と、前記望遠鏡部の水平角、鉛直角を検出する測角部と、前記望遠鏡部を水平方向、鉛直方向に回転駆動する駆動部と、前記第1撮像部、前記第2撮像部の撮像を制御し、前記測角部からの検出結果に基づき前記駆動部を制御する制御装置とを具備し、該制御装置は前記第1撮像部で得られる前記広角画像を接続してパノラマ画像を合成し、前記広角画像をエッジ処理して測定予定点を設定し、該測定予定点をスキャンして各測定予定点について前記第2撮像部により前記望遠画像を取得して望遠画像中から前記測定予定点に対応する測定点を抽出し、該測定点について測距を行う。
【解決手段】広角画像を取得する第1撮像部と前記広角画像より高倍率の望遠画像を取得する第2撮像部とを有する望遠鏡部5と、測距光を射出し測定対象物からの反射光を受光して測距を行う測距部と、前記望遠鏡部の水平角、鉛直角を検出する測角部と、前記望遠鏡部を水平方向、鉛直方向に回転駆動する駆動部と、前記第1撮像部、前記第2撮像部の撮像を制御し、前記測角部からの検出結果に基づき前記駆動部を制御する制御装置とを具備し、該制御装置は前記第1撮像部で得られる前記広角画像を接続してパノラマ画像を合成し、前記広角画像をエッジ処理して測定予定点を設定し、該測定予定点をスキャンして各測定予定点について前記第2撮像部により前記望遠画像を取得して望遠画像中から前記測定予定点に対応する測定点を抽出し、該測定点について測距を行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、広範囲で対象物の多点を測定可能な多点測定方法及び測量装置に関するものである。
【背景技術】
【0002】
従来から、測定対象物に向けてパルスレーザ光線を投影走査し、測定対象物からの反射光に基づき測距を行い、得られた測距値と測定点の高低角、水平角から測定対象物の3次元測定を行う、所謂ノンプリズム測定機や、最近ではレーザスキャナといわれ、高速で多点の測定が可能な3次元測定機が知られている。
【0003】
ノンプリズム測定機は、遠距離測定が可能で測定精度も高く、測定対象物を確実に測定できるが、測定はマニュアル操作で1点毎に行うものであり、岩盤や法面等について多点を測定し、面的なデータを取得するには多大な時間を必要としていた。又、作業者は現地にて測定の漏れや重複をその都度、確認する必要があり、別途、測定対象物をデジタルカメラ等で撮影した画像をハードコピーし、観測時に測定した位置をマークする等して管理していた。
【0004】
又、レーザスキャナによる測定では、測定対象物の詳細且つ面的な3次元データを短時間で取得できるが、通常、土木測定、計測分野等で必要とされる最終成果は図面であり、測定対象物のコーナや輪郭等、特別な部分のみのデータが必要とされる。従って、測定後のデータ処理として、得られた膨大な点群データから図面化に必要な部分の測定データを抽出するには、多大な時間を要し、又大量なデータの記録や管理が必要であるといった問題があった。更に、大部分のレーザスキャナは、数百メートル迄しか測定できなく、遠距離の測定が困難であり、又スキャン時のノイズや点密度が均一でないという問題もあった。
【0005】
【特許文献1】特表2000−509150
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明は斯かる実情に鑑み、多点を効率よく、高精度に測定可能であり、又測定後のデータ処理、管理を簡単、容易にすることができる測量装置を提供するものである。
【課題を解決するための手段】
【0007】
本発明は、測定対象物を含む画像を取得するステップと、該画像を処理して測定対象物の特徴点を抽出して測定予定点とするステップと、該測定予定点をスキャンし該測定予定点の望遠画像を取得するステップと、該望遠画像から前記測定予定点に対応する点を測定点として抽出するステップと、該測定点について測距を行うステップとを有する多点測定方法に係り、又測定対象物を含む画像を取得するステップが、該測定対象物を含む広範囲のパノラマ画像を取得するステップである多点測定方法に係り、又測定対象物を含む仮測定範囲を設定するステップと、前記望遠画像より広角の広角画像により前記仮測定範囲の画像を分割して取得するステップと、広角画像を合成して前記パノラマ画像を取得するステップを有する多点測定方法に係り、又前記測定予定点はエッジ処理によって求める多点測定方法に係り、又エッジ処理に於ける閾値を設定することで、前記測定予定点の密度を選択する多点測定方法に係り、又エッジ処理に於ける特徴点の間隔を指定することで前記測定予定点の密度を選択する多点測定方法に係り、又エッジ処理は広角画像若しくは望遠画像に対して行われ、エッジ処理で得られた特徴点は前記パノラマ画像上に重合されるステップを含む多点測定方法に係り、又特徴点から測定対象物の最外郭部を結線して本測定範囲を設定するステップを有する多点測定方法に係り、又前記測定予定点のスキャンは前記本測定範囲について実行される多点測定方法に係り、又前記測距は、同一測定点で所定回数実行されて得られる平均測距である多点測定方法に係り、更に又測定済測定点を画像上に表示する多点測定方法に係るものである。
【0008】
又本発明は、広角画像を取得する第1撮像部と前記広角画像より高倍率の望遠画像を取得する第2撮像部とを有する望遠鏡部と、測距光を射出し、測定対象物からの反射光を受光して測距を行う測距部と、前記望遠鏡部の水平角、鉛直角を検出する測角部と、前記望遠鏡部を水平方向、鉛直方向に回転駆動する駆動部と、前記第1撮像部、前記第2撮像部の撮像を制御し、前記測角部からの検出結果に基づき前記駆動部を制御する制御装置とを具備し、該制御装置は前記第1撮像部で得られる前記広角画像を接続してパノラマ画像を合成し、前記広角画像をエッジ処理して測定予定点を設定し、該測定予定点をスキャンして各測定予定点について前記第2撮像部により前記望遠画像を取得して望遠画像中から前記測定予定点に対応する測定点を抽出し、該測定点について測距を行う様構成した測量装置に係り、又前記制御装置は、前記測定点の水平角、鉛直角を演算し、測定点の3次元データを取得する測量装置に係り、又前記望遠鏡部を離隔した2点に向けることで、2点を対角線とする矩形の仮測定範囲が設定される様にした測量装置に係り、又前記制御装置は、前記仮測定範囲の特徴点から測定対象物の最外郭部を結線して本測定範囲を設定し、該本測定範囲をスキャンする様前記駆動部を制御する測量装置に係り、更に又前記測距部は同一測定点に対して所要回数測距を行い、平均値を測距結果とする測量装置に係るものである。
【発明の効果】
【0009】
本発明によれば、測定対象物を含む広範囲の画像を取得するステップと、該画像を処理して測定対象物の特徴点を抽出して測定予定点とするステップと、該測定予定点をスキャンし該測定予定点の望遠画像を取得するステップと、該望遠画像から前記測定予定点に対応する点を測定点として抽出するステップと、該測定点について測距を行うステップとを有するので、測定点が大幅に減少し、測定時間の短縮、後処理で特徴点を抽出する作業が省略され、作業量が大幅に減少する。
【0010】
又本発明によれば、測定対象物を含む仮測定範囲を設定するステップと、前記望遠画像より広角の広角画像により前記仮測定範囲の画像を分割して取得するステップと、広角画像を合成して前記パノラマ画像を取得するステップを有するので、広範囲の多点測定が可能であり、又大きな測定対象物に対しても一度の測定作業で測定作業が完了する。
【0011】
又本発明によれば、前記測定予定点はエッジ処理によって求めるので、画像の特徴部分であるエッジ、コーナ等、測距データが必要とされる部分を抽出することができる。
【0012】
又本発明によれば、エッジ処理に於ける閾値を設定することで、前記測定予定点の密度を選択するので、或はエッジ処理に於ける特徴点の間隔を指定することで前記測定予定点の密度を選択するので、状況に応じて最適な密度で測定を実施することができる。
【0013】
又本発明によれば、特徴点から測定対象物の最外郭部を結線して本測定範囲を設定するステップを有するので、更に前記測定予定点のスキャンは前記本測定範囲について実行されるので、測定不能な部分、測定に適さない部分が測定から除外され、測定作業時間が短縮し、測定作業効率が向上する。
【0014】
又本発明によれば、前記測距は、同一測定点で所定回数実行されて得られる平均測距であるので高精度の測距が行える。
【0015】
又本発明によれば、測定済測定点を画像上に表示するので、測定状況が容易に把握でき、又測定漏れを防止することができる。
【0016】
又本発明によれば、広角画像を取得する第1撮像部と前記広角画像より高倍率の望遠画像を取得する第2撮像部とを有する望遠鏡部と、測距光を射出し、測定対象物からの反射光を受光して測距を行う測距部と、前記望遠鏡部の水平角、鉛直角を検出する測角部と、前記望遠鏡部を水平方向、鉛直方向に回転駆動する駆動部と、前記第1撮像部、前記第2撮像部の撮像を制御し、前記測角部からの検出結果に基づき前記駆動部を制御する制御装置とを具備し、該制御装置は前記第1撮像部で得られる前記広角画像を接続してパノラマ画像を合成し、前記広角画像をエッジ処理して測定予定点を設定し、該測定予定点をスキャンして各測定予定点について前記第2撮像部により前記望遠画像を取得して望遠画像中から前記測定予定点に対応する測定点を抽出し、該測定点について測距を行う様構成したので、測定点が大幅に減少し、測定時間の短縮、後処理で特徴点を抽出する作業が省略され、作業量が大幅に減少する。
【0017】
又本発明によれば、前記制御装置は、前記測定点の水平角、鉛直角を演算し、測定点の3次元データを取得するので、測定点についての3次元データの取得が能率よく行え、作業量が軽減される。
【0018】
又本発明によれば、前記望遠鏡部を離隔した2点に向けることで、2点を対角線とする矩形の仮測定範囲が設定される様にしたので、仮測定範囲の設定が容易となる。
【0019】
又本発明によれば、前記制御装置は、前記仮測定範囲の特徴点から測定対象物の最外郭部を結線して本測定範囲を設定し、該本測定範囲をスキャンする様前記駆動部を制御するので、測定不能、測定データを必要としない部分での測距作動が省略され、作業効率の向上、作業時間の短縮が図れる。
【0020】
更に又本発明によれば、前記測距部は同一測定点に対して所要回数測距を行い、平均値を測距結果とするので測定が高精度に行われる。
【発明を実施するための最良の形態】
【0021】
以下、図面を参照しつつ本発明を実施する為の最良の形態を説明する。
【0022】
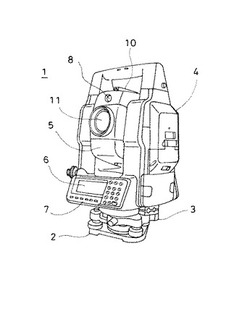
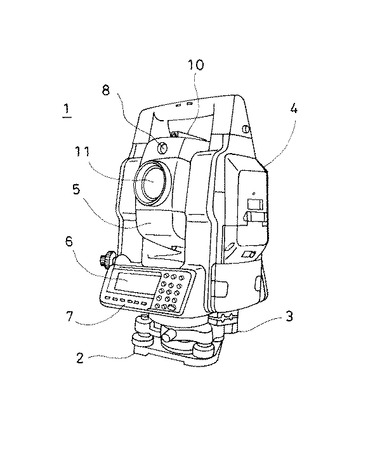
図1は本発明が実施される測量装置1を示している。尚、用いられる測量装置1は、例えばトータルステーションであり、測定点についてパルスレーザ光線を照射し、測定点からのパルス反射光を受光して、各パルス毎に測距を行い、測距結果を平均化して高精度の距離測定を行うものである。
【0023】
該測量装置1は主に、図示しない三脚に取付けられる整準部2、該整準部2に設けられた基盤部3、該基盤部3に鉛直軸心を中心に回転可能に設けられた托架部4、該托架部4に水平軸心を中心に回転可能に設けられた望遠鏡部5から構成されている。尚、前記測量装置1には、該測量装置1の概略の視準方向を設定する為の照星照門10が設けられている。
【0024】
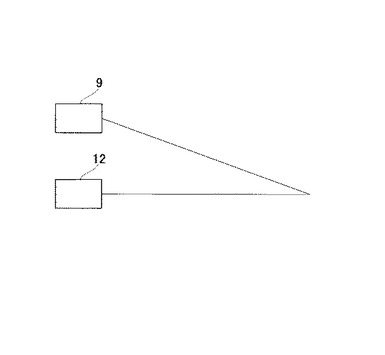
前記托架部4は表示部6、操作入力部7を具備し、前記望遠鏡部5は、測定対象物を視準する第2望遠鏡11と該第2望遠鏡11の光学系を通して視準方向の画像(望遠画像)を取得する第2撮像部12(後述)を有し、更に前記第2望遠鏡11より低倍率で広範囲な視野を有する第1望遠鏡8と該第1望遠鏡8の光学系を介して視準方向、或は略視準方向の画像(広角画像)を取得する第1撮像部9(後述)を具備している。該第1撮像部9、前記第2撮像部12には撮像画像をデジタル画像信号として出力する、例えばデジタルカメラが用いられる。
【0025】
前記第1撮像部9、前記第2撮像部12が有する受光素子は、例えば画素の集合体であるCCD等であり、受光する画素の位置が特定でき、又受光する画素の位置から画角が求められる様になっている。
【0026】
図2により、前記測量装置1の基本構成について説明する。
【0027】
前記望遠鏡部5は、前記第2望遠鏡11の光学系を共有する測距部17を内蔵し、該測距部17は測距光を射出すると共に測定対象物からの反射光を受光して測定対象物迄の光波距離測定を行う。
【0028】
前記托架部4には、該托架部4を水平方向に回転させる為の水平駆動部13が設けられると共に前記托架部4の前記基盤部3に対する水平回転角を検出し、視準方向の水平角を検出する水平測角部14が設けられる。又前記托架部4には、水平軸心を中心に前記望遠鏡部5を回転する鉛直駆動部15が設けられると共に前記望遠鏡部5の鉛直角を検出し、視準方向の鉛直角を測角する鉛直測角部16が設けられる。
【0029】
前記托架部4には制御装置21が内蔵され、該制御装置21は、前記水平駆動部13、前記鉛直駆動部15の駆動を制御して前記托架部4、前記望遠鏡部5を回転して該望遠鏡部5を所定の方向に向け、又所定の範囲を走査し、前記第1望遠鏡8、前記第2望遠鏡11の切替えを制御して、所要の倍率の画像を取得し、更に前記測距部17を制御して所定の測定点の測距を行う。
【0030】
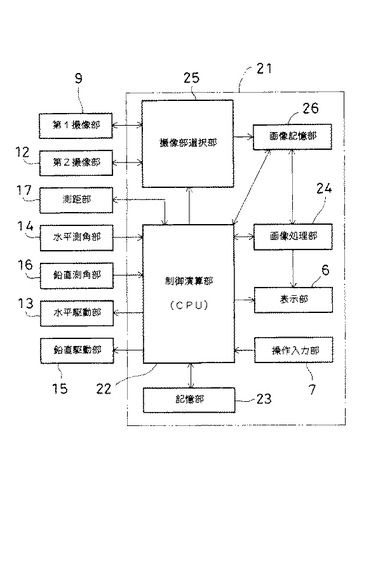
前記制御装置21は、制御演算部22、記憶部23、画像処理部24、撮像部選択部25、画像記憶部26、前記表示部6、前記操作入力部7等から構成されている。
【0031】
前記記憶部23には測定に必要な計算プログラム、或は後述する画像処理を行う為の画像処理プログラム、処理された画像から測定点を選択し、選択された測定点について、走査しつつ測距を実行するシーケンスプログラム等のプログラムが格納されている。
【0032】
又、前記制御演算部22には前記測距部17、前記水平測角部14、前記鉛直測角部16からの測定結果が入力され、距離測定、高低角、水平角の測定が行われ、測定結果は前記制御演算部22を介して前記記憶部23に格納されると共に前記表示部6に表示される様になっている。
【0033】
前記撮像部選択部25により選択された前記第1撮像部9、前記第2撮像部12のいずれかが撮像した画像は、前記画像記憶部26に格納され、又前記表示部6に表示される。前記画像処理部24は、前記画像記憶部26に格納された画像(例えば前記第1撮像部9で取得した画像)を合成して、より広範囲の合成画像とする。又、前記画像処理部24は合成画像をエッジ処理する等して、輪郭線、角点を検出し、前記画像記憶部26に格納すると共に前記表示部6に表示する。
【0034】
以下、本発明に係る測量装置の作動について図3を参照して説明する。
【0035】
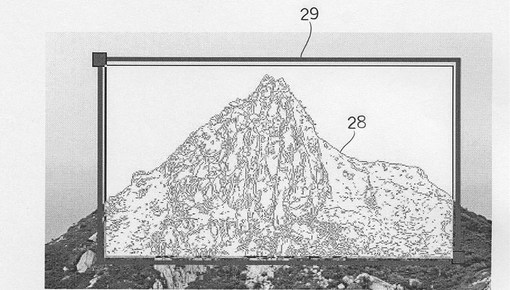
尚、測定対象物28が、例えば山の頂部であった場合を以下に説明する。
【0036】
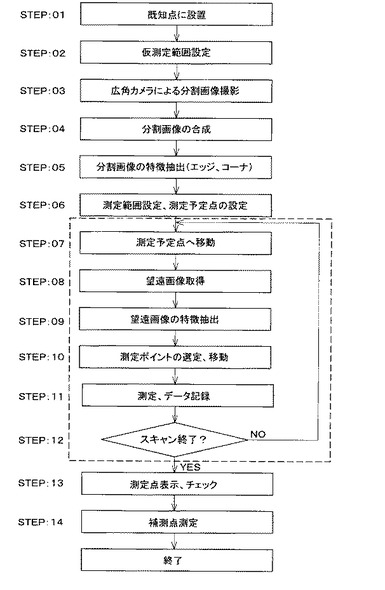
STEP:01 測量装置1を既知点に設置し、該測量装置1の電源を投入する。又、前記操作入力部7を操作して測定に必要なプログラムを起動展開する。
【0037】
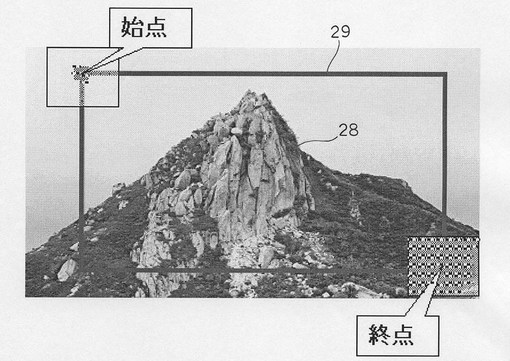
STEP:02 前記照星照門10で視準しながら前記測量装置1の視準方向を変え、前記操作入力部7より始点と終点を設定する。始点、終点について前記水平測角部14、前記鉛直測角部16によりそれぞれ水平角、高低角が検出され、検出結果は前記記憶部23に記録される。始点と終点は矩形の対角線として認識され、該対角線を有する矩形の範囲が設定される(図4参照)。設定された矩形の範囲は、仮測定範囲29として設定される。
【0038】
尚、始動当初は、広角の前記第1撮像部9で撮像された映像が前記表示部6に表示されており、該表示部6にタッチパネル等の機能を付加して表示された画面上から始点と終点とを指定してもよい。
【0039】
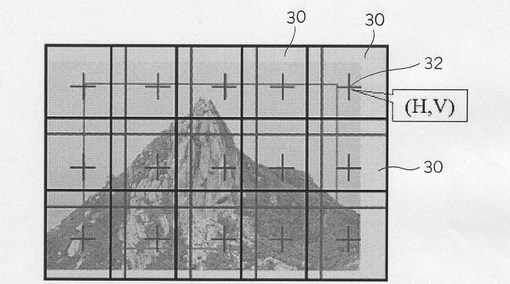
前記仮測定範囲29は、通常前記第1撮像部9の撮像範囲(撮像画角)を越えており、前記仮測定範囲29、前記撮像画角を基に、前記仮測定範囲29を撮影する為の分割態様が演算される。即ち、水平方向、鉛直方向の分割数と各分割画像30の画像中心位置(前記第1撮像部9の光軸位置)32が、水平角、鉛直角として演算される。
【0040】
又、分割画像は合成の為、水平方向、鉛直方向共に所要量オーバラップする様に設定される(図5参照)。
【0041】
例えば、前記仮測定範囲29の水平角が60°、鉛直角が30°とし、前記第1撮像部9の画角が15であった場合、オーバラップ部も含め、水平5分割、鉛直3分割、5×3=15、15枚の分割画像が撮像される。前記オーバラップ部は、前記分割画像の2割程度とし、各画像を接続する場合のコントラスト調整に使用される。
【0042】
STEP:03 前記制御演算部22により、前記水平駆動部13、前記鉛直駆動部15、前記第1撮像部9が制御され、演算された前記中心位置で前記第1撮像部9による撮像が行われ、撮像された画像(広角画像)は、分割画像として、検出された中心位置の水平角、鉛直角(H,V)と関連付けられ、前記画像記憶部26に格納される。
【0043】
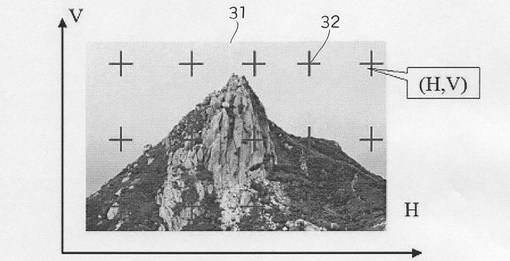
STEP:04 前記画像処理部24に於いて、前記画像記憶部26に格納された分割画像30が読出され、分割画像に関連付けられた水平角、鉛直角に基づき位置付けして並べられ、隣接する2つの分割画像30の一方を基準画像とし、オーバラップ部分の基準画像の画像の濃淡情報を用い基準画像と他方の画像とが同様のコントラストとなる様に、他方の画像のコントラストの調整を行って接続する。同様にして、全ての分割画像30が接続され、パノラマ画像31が合成される。
【0044】
尚、該パノラマ画像31の各分割画像30の画像中心位置(前記第1撮像部9の光軸位置)32は、前記水平測角部14、前記鉛直測角部16から水平角、高低角が求められ、更に各分割画像30中の任意の点は、前記画像中心位置32を基準とする水平、鉛直の画角から演算することで水平角、高低角が求められる。従って、前記パノラマ画像31の全域での、任意の点の高低角、水平角が演算により求められる。
【0045】
STEP:05 画像処理ソフトが起動され、前記各分割画像30についてエッジ処理等の画像処理され特徴点が抽出される。又、特徴点が抽出された画像が前記パノラマ画像上に重合される。尚、特徴点とは、例えばエッジ、コーナであり、エッジの検出には、例えばCannyオペレータを用い、コーナの検出にはHarisオペレータ等を使用する。又、特徴点の抽出は、前記パノラマ画像31中、STEP:02で設定した前記仮測定範囲29に対して行ってもよい。
【0046】
以下、例としてCANNYフィルタを使用した特徴抽出方法について説明する。
【0047】
CANNYフィルタとはノイズ除去を行った後に1次微分を行い、その結果が極大値となる画素を特徴(エッジ)とするものであり、原画像の濃淡値をI(x,y)、ガウス関数をG(x,y)とすると、CANNYフィルタによる出力値f(x,y)は(式1)にて表される。
【0048】
f(x,y)=D[G(x,y)×I(x,y)]=D[G(x,y)]×I(x,y) … (式1)
ここで、D[G(x,y)]=[(x2+y2)1/2/2πσ4]exp[−(x2+y2)/2σ2] … (式2)
【0049】
以下に示す2つの閾値T1、T2を設定することによりエッジ抽出が行われる。
【0050】
f(x,y)>T1、 f(x,y)/2σ0(x,y)>T2 … (式3)
ここで、σ02(x,y)=G′(x,y)×I2(x,y)−[G′(x,y)×I(x,y)]2 … (式4)
【0051】
尚、(式3)で表される閾値T1、T2はそれぞれエッジの高さ及びエッジの信頼度と呼ばれている。
【0052】
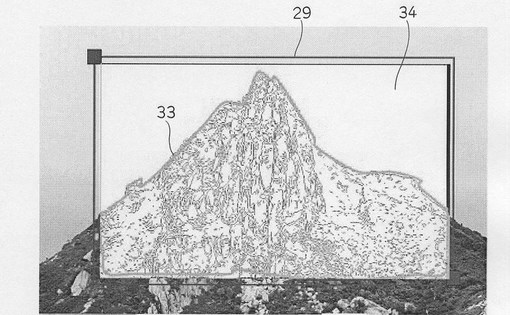
STEP:06 前記仮測定範囲29で指定された範囲内に含まれる特徴点が抽出され、特徴抽出後、抽出したコーナの最外郭部が結線され、本測定範囲33が自動的に設定される。抽出された特徴点、前記本測定範囲33は前記画像記憶部26に格納される。前記本測定範囲33が設定されることで、測定不能、或は測定に不適な部分、不測定部分34が除外される(図8参照)。前記本測定範囲33が設定され、特徴点が抽出されることで、測定は前記本測定範囲33の範囲内の特徴点について実行される。
【0053】
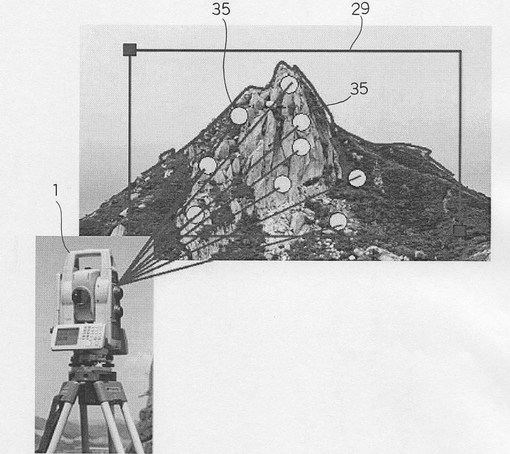
(式3)の閾値及び特徴点の間隔を指定することで、特徴点の抽出密度を変えることができる。従って、閾値、間隔により測定対象物に応じて特徴点の密度、即ち測定点の密度を設定することができ、必要な点のみを測定点として設定することができる。閾値の設定により得られた特徴点は、測定予定点35とされる。該測定予定点35は、前記パノラマ画像31上の位置から、画角が演算され、更に、画角から水平角、鉛直角が演算され、前記測定予定点35は水平角、鉛直角と関連付けられて前記画像記憶部26に格納される(図9参照)。
【0054】
尚、測定点の密度を設定するファクタとして、画像のコントラストを調整する等してもよい。
【0055】
STEP:07 前記本測定範囲33の設定、前記測定予定点35の抽出が完了すると、測定の為のシーケンスプログラムが起動実行される。前記制御演算部22が前記水平駆動部13、前記鉛直駆動部15を駆動制御し、前記第2撮像部12の光軸が前記測定予定点35に順次移動する様にスキャンする。
【0056】
STEP:08 前記第2撮像部12の光軸が前記測定予定点35に移動すると、前記撮像部選択部25により前記第2撮像部12に切替えられ、該第2撮像部12によって前記測定予定点35を中心とした撮像が行われ、撮像画像は前記表示部6に表示される。又、前記光軸が前記測定予定点35に移動すると、前記測距部17による測距が行われ、測距結果に基づき前記第2撮像部12、即ち前記第2望遠鏡11の焦点合せが行われる。尚、この場合の測距は前記第2望遠鏡11の焦点合せを目的とする測距であり、高精度は要求されない。
【0057】
焦点合せが完了すると、前記第2望遠鏡11を通して前記第2撮像部12により望遠画像が取得される。
【0058】
STEP:09 エッジ処理等の画像処理により、前記望遠画像中の特徴点、例えばコーナを抽出する。尚、エッジ処理した結果は前記パノラマ画像に重合してもよい。
【0059】
STEP:10 前記パノラマ画像31で得られた前記測定予定点35に基づき、前記望遠画像中抽出されたコーナの中から前記測定予定点35に該当するコーナを選定する。選定したコーナは測定点とされる。
【0060】
この場合、図1、図10に示される様に、前記第1撮像部9(前記第1望遠鏡8)の光軸と前記第2撮像部12(前記第2望遠鏡11)の光軸とは合致していないので、前記第1撮像部9で得られた位置情報のみでは、前記望遠画像上でのずれが生じる。このずれを補正するには、測定対象物迄の距離を測定し、得られた距離情報から下記の共線条件式で得られる画像座標を計算して補正する。尚、共線条件式は、基準データ(X,Y,Z)とカメラとの関係を示すものである。
【0061】
前記測量装置1が持つ機械原点に対する前記第1撮像部9の位置は既知であり、又前記第2撮像部12の光軸に対する機械原点に於ける前記第1撮像部9の光軸のずれ量、前記第2撮像部12の光軸に対する前記第1撮像部9の光軸の傾きもそれぞれ既知である。
【0062】
f:第1撮像部9の焦点、(x,y):第1撮像部9の画像中の座標(画像座標)、(X,Y,Z):基準点、(X0,Y0,Z0):第1撮像部9の撮影位置、a1〜a9:第1撮像部9の傾き、dx,dy:第1撮像部9のキャリブレーション補正項として共線条件式は以下に表される。
【0063】
x=−f{[a1(X−X0)+a2(Y−Y0)+a3(Z−Z0)]/[a7(X−X0)+a8(Y−Y0)+a9(Z−Z0)]}+dx
y=−f{[a4(X−X0)+a5(Y−Y0)+a6(Z−Z0)]/[a7(X−X0)+a8(Y−Y0)+a9(Z−Z0)]}+dy … (式5)
【0064】
更に、前記キャリブレーション補正項dx,dyに対しては下記の補正式が用いられる。
【0065】
dx=x0+x(k1r2+k2r4+k3r6+k4r8)+p1(r2+2x2)+2p2xy
dy=y0+y(k1r2+k2r4+k3r6+k4r8)+p2(r2+2y2)+2p1xy
ここで、x0,y0:主点位置、k1,k2,k3,k4:放射方向歪曲収差に関する係数、p1,p2:接線方向歪曲収差に関する係数、r=√(x2+y2):主点(x0,y0)からの距離を示す。
【0066】
共線条件式を用いる場合、カメラキャリブレーションを既知とすると、3点以上の基準点があれば、単写真の外部標定要素(位置、傾き)を求めることができる。写真測量では標定時の誤差を考慮して、4点以上の基準点を用い、最小2乗法で各々のパラメータを求め、画像座標から算出した3次元座標と元の基準点との誤差も算出する。
【0067】
STEP:11 選定された測定点について本測定が行われる。本測定で得られた測距データは測定点の水平角、鉛直角と共に前記望遠画像に関連付けられて前記画像記憶部26又は前記記憶部23に格納される。測定の完了した測定点については、前記パノラマ画像31上に点表示される。
【0068】
STEP:12 前記測定予定点35で、本測定の完了していないものがあるかどうかが判断され、ある場合は次の本測定の対象として残った前記測定予定点35が選定され、STEP:07〜STEP:11迄の測定が繰返し行われる。
【0069】
STEP:13 前記パノラマ画像31で抽出された全ての測定予定点35について測定(スキャン)が完了すると、全点が前記パノラマ画像31に表示され、測定点の漏れがないかがチェックされる。未測定の測定点は補測点として、前記画像記憶部26に記録される。又、画像上で測定作業者が補測点を指定して追加することも可能である。
【0070】
STEP:14 更に、補測点が自動的にスキャンされて、測定され、測定が終了する。
【0071】
上記した様に、本発明による測定では、測定の目的に応じた多点測定が可能であり、例えば、地図作製の為の測定では、輪郭等必要部分、必要箇所だけの測定となり、測定点が大幅に削減でき、更に、空等、従来の自動測定では測定不能でエラーとなっていた箇所が除外され、測定の効率化が図れる。
【0072】
又、トータルステーションを用いた多点自動測定が可能であるので、測定点について平均測距が行われ、高精度の測定データが取得できる。
【図面の簡単な説明】
【0073】
【図1】本発明が実施される測量装置の一例を示す斜視図である。
【図2】該測量装置の構成ブロック図である。
【図3】本発明の測定の流れを示すフローチャートである。
【図4】測定の流れに対応した画像を示す説明図である。
【図5】測定の流れに対応した画像を示す説明図である。
【図6】測定の流れに対応した画像を示す説明図である。
【図7】測定の流れに対応した画像を示す説明図である。
【図8】測定の流れに対応した画像を示す説明図である。
【図9】測定の流れに対応した画像を示す説明図である。
【図10】第1撮像部と第2撮像部の位置関係を示す説明図である。
【符号の説明】
【0074】
1 測量装置
4 托架部
5 望遠鏡部
6 表示部
7 操作入力部
8 第1望遠鏡
9 第1撮像部
10 照星照門
11 第2望遠鏡
12 第2撮像部
13 水平駆動部
14 水平測角部
15 鉛直駆動部
17 測距部
21 制御装置
22 制御演算部
23 記憶部
24 画像処理部
25 撮像部選択部
26 画像記憶部
【技術分野】
【0001】
本発明は、広範囲で対象物の多点を測定可能な多点測定方法及び測量装置に関するものである。
【背景技術】
【0002】
従来から、測定対象物に向けてパルスレーザ光線を投影走査し、測定対象物からの反射光に基づき測距を行い、得られた測距値と測定点の高低角、水平角から測定対象物の3次元測定を行う、所謂ノンプリズム測定機や、最近ではレーザスキャナといわれ、高速で多点の測定が可能な3次元測定機が知られている。
【0003】
ノンプリズム測定機は、遠距離測定が可能で測定精度も高く、測定対象物を確実に測定できるが、測定はマニュアル操作で1点毎に行うものであり、岩盤や法面等について多点を測定し、面的なデータを取得するには多大な時間を必要としていた。又、作業者は現地にて測定の漏れや重複をその都度、確認する必要があり、別途、測定対象物をデジタルカメラ等で撮影した画像をハードコピーし、観測時に測定した位置をマークする等して管理していた。
【0004】
又、レーザスキャナによる測定では、測定対象物の詳細且つ面的な3次元データを短時間で取得できるが、通常、土木測定、計測分野等で必要とされる最終成果は図面であり、測定対象物のコーナや輪郭等、特別な部分のみのデータが必要とされる。従って、測定後のデータ処理として、得られた膨大な点群データから図面化に必要な部分の測定データを抽出するには、多大な時間を要し、又大量なデータの記録や管理が必要であるといった問題があった。更に、大部分のレーザスキャナは、数百メートル迄しか測定できなく、遠距離の測定が困難であり、又スキャン時のノイズや点密度が均一でないという問題もあった。
【0005】
【特許文献1】特表2000−509150
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明は斯かる実情に鑑み、多点を効率よく、高精度に測定可能であり、又測定後のデータ処理、管理を簡単、容易にすることができる測量装置を提供するものである。
【課題を解決するための手段】
【0007】
本発明は、測定対象物を含む画像を取得するステップと、該画像を処理して測定対象物の特徴点を抽出して測定予定点とするステップと、該測定予定点をスキャンし該測定予定点の望遠画像を取得するステップと、該望遠画像から前記測定予定点に対応する点を測定点として抽出するステップと、該測定点について測距を行うステップとを有する多点測定方法に係り、又測定対象物を含む画像を取得するステップが、該測定対象物を含む広範囲のパノラマ画像を取得するステップである多点測定方法に係り、又測定対象物を含む仮測定範囲を設定するステップと、前記望遠画像より広角の広角画像により前記仮測定範囲の画像を分割して取得するステップと、広角画像を合成して前記パノラマ画像を取得するステップを有する多点測定方法に係り、又前記測定予定点はエッジ処理によって求める多点測定方法に係り、又エッジ処理に於ける閾値を設定することで、前記測定予定点の密度を選択する多点測定方法に係り、又エッジ処理に於ける特徴点の間隔を指定することで前記測定予定点の密度を選択する多点測定方法に係り、又エッジ処理は広角画像若しくは望遠画像に対して行われ、エッジ処理で得られた特徴点は前記パノラマ画像上に重合されるステップを含む多点測定方法に係り、又特徴点から測定対象物の最外郭部を結線して本測定範囲を設定するステップを有する多点測定方法に係り、又前記測定予定点のスキャンは前記本測定範囲について実行される多点測定方法に係り、又前記測距は、同一測定点で所定回数実行されて得られる平均測距である多点測定方法に係り、更に又測定済測定点を画像上に表示する多点測定方法に係るものである。
【0008】
又本発明は、広角画像を取得する第1撮像部と前記広角画像より高倍率の望遠画像を取得する第2撮像部とを有する望遠鏡部と、測距光を射出し、測定対象物からの反射光を受光して測距を行う測距部と、前記望遠鏡部の水平角、鉛直角を検出する測角部と、前記望遠鏡部を水平方向、鉛直方向に回転駆動する駆動部と、前記第1撮像部、前記第2撮像部の撮像を制御し、前記測角部からの検出結果に基づき前記駆動部を制御する制御装置とを具備し、該制御装置は前記第1撮像部で得られる前記広角画像を接続してパノラマ画像を合成し、前記広角画像をエッジ処理して測定予定点を設定し、該測定予定点をスキャンして各測定予定点について前記第2撮像部により前記望遠画像を取得して望遠画像中から前記測定予定点に対応する測定点を抽出し、該測定点について測距を行う様構成した測量装置に係り、又前記制御装置は、前記測定点の水平角、鉛直角を演算し、測定点の3次元データを取得する測量装置に係り、又前記望遠鏡部を離隔した2点に向けることで、2点を対角線とする矩形の仮測定範囲が設定される様にした測量装置に係り、又前記制御装置は、前記仮測定範囲の特徴点から測定対象物の最外郭部を結線して本測定範囲を設定し、該本測定範囲をスキャンする様前記駆動部を制御する測量装置に係り、更に又前記測距部は同一測定点に対して所要回数測距を行い、平均値を測距結果とする測量装置に係るものである。
【発明の効果】
【0009】
本発明によれば、測定対象物を含む広範囲の画像を取得するステップと、該画像を処理して測定対象物の特徴点を抽出して測定予定点とするステップと、該測定予定点をスキャンし該測定予定点の望遠画像を取得するステップと、該望遠画像から前記測定予定点に対応する点を測定点として抽出するステップと、該測定点について測距を行うステップとを有するので、測定点が大幅に減少し、測定時間の短縮、後処理で特徴点を抽出する作業が省略され、作業量が大幅に減少する。
【0010】
又本発明によれば、測定対象物を含む仮測定範囲を設定するステップと、前記望遠画像より広角の広角画像により前記仮測定範囲の画像を分割して取得するステップと、広角画像を合成して前記パノラマ画像を取得するステップを有するので、広範囲の多点測定が可能であり、又大きな測定対象物に対しても一度の測定作業で測定作業が完了する。
【0011】
又本発明によれば、前記測定予定点はエッジ処理によって求めるので、画像の特徴部分であるエッジ、コーナ等、測距データが必要とされる部分を抽出することができる。
【0012】
又本発明によれば、エッジ処理に於ける閾値を設定することで、前記測定予定点の密度を選択するので、或はエッジ処理に於ける特徴点の間隔を指定することで前記測定予定点の密度を選択するので、状況に応じて最適な密度で測定を実施することができる。
【0013】
又本発明によれば、特徴点から測定対象物の最外郭部を結線して本測定範囲を設定するステップを有するので、更に前記測定予定点のスキャンは前記本測定範囲について実行されるので、測定不能な部分、測定に適さない部分が測定から除外され、測定作業時間が短縮し、測定作業効率が向上する。
【0014】
又本発明によれば、前記測距は、同一測定点で所定回数実行されて得られる平均測距であるので高精度の測距が行える。
【0015】
又本発明によれば、測定済測定点を画像上に表示するので、測定状況が容易に把握でき、又測定漏れを防止することができる。
【0016】
又本発明によれば、広角画像を取得する第1撮像部と前記広角画像より高倍率の望遠画像を取得する第2撮像部とを有する望遠鏡部と、測距光を射出し、測定対象物からの反射光を受光して測距を行う測距部と、前記望遠鏡部の水平角、鉛直角を検出する測角部と、前記望遠鏡部を水平方向、鉛直方向に回転駆動する駆動部と、前記第1撮像部、前記第2撮像部の撮像を制御し、前記測角部からの検出結果に基づき前記駆動部を制御する制御装置とを具備し、該制御装置は前記第1撮像部で得られる前記広角画像を接続してパノラマ画像を合成し、前記広角画像をエッジ処理して測定予定点を設定し、該測定予定点をスキャンして各測定予定点について前記第2撮像部により前記望遠画像を取得して望遠画像中から前記測定予定点に対応する測定点を抽出し、該測定点について測距を行う様構成したので、測定点が大幅に減少し、測定時間の短縮、後処理で特徴点を抽出する作業が省略され、作業量が大幅に減少する。
【0017】
又本発明によれば、前記制御装置は、前記測定点の水平角、鉛直角を演算し、測定点の3次元データを取得するので、測定点についての3次元データの取得が能率よく行え、作業量が軽減される。
【0018】
又本発明によれば、前記望遠鏡部を離隔した2点に向けることで、2点を対角線とする矩形の仮測定範囲が設定される様にしたので、仮測定範囲の設定が容易となる。
【0019】
又本発明によれば、前記制御装置は、前記仮測定範囲の特徴点から測定対象物の最外郭部を結線して本測定範囲を設定し、該本測定範囲をスキャンする様前記駆動部を制御するので、測定不能、測定データを必要としない部分での測距作動が省略され、作業効率の向上、作業時間の短縮が図れる。
【0020】
更に又本発明によれば、前記測距部は同一測定点に対して所要回数測距を行い、平均値を測距結果とするので測定が高精度に行われる。
【発明を実施するための最良の形態】
【0021】
以下、図面を参照しつつ本発明を実施する為の最良の形態を説明する。
【0022】
図1は本発明が実施される測量装置1を示している。尚、用いられる測量装置1は、例えばトータルステーションであり、測定点についてパルスレーザ光線を照射し、測定点からのパルス反射光を受光して、各パルス毎に測距を行い、測距結果を平均化して高精度の距離測定を行うものである。
【0023】
該測量装置1は主に、図示しない三脚に取付けられる整準部2、該整準部2に設けられた基盤部3、該基盤部3に鉛直軸心を中心に回転可能に設けられた托架部4、該托架部4に水平軸心を中心に回転可能に設けられた望遠鏡部5から構成されている。尚、前記測量装置1には、該測量装置1の概略の視準方向を設定する為の照星照門10が設けられている。
【0024】
前記托架部4は表示部6、操作入力部7を具備し、前記望遠鏡部5は、測定対象物を視準する第2望遠鏡11と該第2望遠鏡11の光学系を通して視準方向の画像(望遠画像)を取得する第2撮像部12(後述)を有し、更に前記第2望遠鏡11より低倍率で広範囲な視野を有する第1望遠鏡8と該第1望遠鏡8の光学系を介して視準方向、或は略視準方向の画像(広角画像)を取得する第1撮像部9(後述)を具備している。該第1撮像部9、前記第2撮像部12には撮像画像をデジタル画像信号として出力する、例えばデジタルカメラが用いられる。
【0025】
前記第1撮像部9、前記第2撮像部12が有する受光素子は、例えば画素の集合体であるCCD等であり、受光する画素の位置が特定でき、又受光する画素の位置から画角が求められる様になっている。
【0026】
図2により、前記測量装置1の基本構成について説明する。
【0027】
前記望遠鏡部5は、前記第2望遠鏡11の光学系を共有する測距部17を内蔵し、該測距部17は測距光を射出すると共に測定対象物からの反射光を受光して測定対象物迄の光波距離測定を行う。
【0028】
前記托架部4には、該托架部4を水平方向に回転させる為の水平駆動部13が設けられると共に前記托架部4の前記基盤部3に対する水平回転角を検出し、視準方向の水平角を検出する水平測角部14が設けられる。又前記托架部4には、水平軸心を中心に前記望遠鏡部5を回転する鉛直駆動部15が設けられると共に前記望遠鏡部5の鉛直角を検出し、視準方向の鉛直角を測角する鉛直測角部16が設けられる。
【0029】
前記托架部4には制御装置21が内蔵され、該制御装置21は、前記水平駆動部13、前記鉛直駆動部15の駆動を制御して前記托架部4、前記望遠鏡部5を回転して該望遠鏡部5を所定の方向に向け、又所定の範囲を走査し、前記第1望遠鏡8、前記第2望遠鏡11の切替えを制御して、所要の倍率の画像を取得し、更に前記測距部17を制御して所定の測定点の測距を行う。
【0030】
前記制御装置21は、制御演算部22、記憶部23、画像処理部24、撮像部選択部25、画像記憶部26、前記表示部6、前記操作入力部7等から構成されている。
【0031】
前記記憶部23には測定に必要な計算プログラム、或は後述する画像処理を行う為の画像処理プログラム、処理された画像から測定点を選択し、選択された測定点について、走査しつつ測距を実行するシーケンスプログラム等のプログラムが格納されている。
【0032】
又、前記制御演算部22には前記測距部17、前記水平測角部14、前記鉛直測角部16からの測定結果が入力され、距離測定、高低角、水平角の測定が行われ、測定結果は前記制御演算部22を介して前記記憶部23に格納されると共に前記表示部6に表示される様になっている。
【0033】
前記撮像部選択部25により選択された前記第1撮像部9、前記第2撮像部12のいずれかが撮像した画像は、前記画像記憶部26に格納され、又前記表示部6に表示される。前記画像処理部24は、前記画像記憶部26に格納された画像(例えば前記第1撮像部9で取得した画像)を合成して、より広範囲の合成画像とする。又、前記画像処理部24は合成画像をエッジ処理する等して、輪郭線、角点を検出し、前記画像記憶部26に格納すると共に前記表示部6に表示する。
【0034】
以下、本発明に係る測量装置の作動について図3を参照して説明する。
【0035】
尚、測定対象物28が、例えば山の頂部であった場合を以下に説明する。
【0036】
STEP:01 測量装置1を既知点に設置し、該測量装置1の電源を投入する。又、前記操作入力部7を操作して測定に必要なプログラムを起動展開する。
【0037】
STEP:02 前記照星照門10で視準しながら前記測量装置1の視準方向を変え、前記操作入力部7より始点と終点を設定する。始点、終点について前記水平測角部14、前記鉛直測角部16によりそれぞれ水平角、高低角が検出され、検出結果は前記記憶部23に記録される。始点と終点は矩形の対角線として認識され、該対角線を有する矩形の範囲が設定される(図4参照)。設定された矩形の範囲は、仮測定範囲29として設定される。
【0038】
尚、始動当初は、広角の前記第1撮像部9で撮像された映像が前記表示部6に表示されており、該表示部6にタッチパネル等の機能を付加して表示された画面上から始点と終点とを指定してもよい。
【0039】
前記仮測定範囲29は、通常前記第1撮像部9の撮像範囲(撮像画角)を越えており、前記仮測定範囲29、前記撮像画角を基に、前記仮測定範囲29を撮影する為の分割態様が演算される。即ち、水平方向、鉛直方向の分割数と各分割画像30の画像中心位置(前記第1撮像部9の光軸位置)32が、水平角、鉛直角として演算される。
【0040】
又、分割画像は合成の為、水平方向、鉛直方向共に所要量オーバラップする様に設定される(図5参照)。
【0041】
例えば、前記仮測定範囲29の水平角が60°、鉛直角が30°とし、前記第1撮像部9の画角が15であった場合、オーバラップ部も含め、水平5分割、鉛直3分割、5×3=15、15枚の分割画像が撮像される。前記オーバラップ部は、前記分割画像の2割程度とし、各画像を接続する場合のコントラスト調整に使用される。
【0042】
STEP:03 前記制御演算部22により、前記水平駆動部13、前記鉛直駆動部15、前記第1撮像部9が制御され、演算された前記中心位置で前記第1撮像部9による撮像が行われ、撮像された画像(広角画像)は、分割画像として、検出された中心位置の水平角、鉛直角(H,V)と関連付けられ、前記画像記憶部26に格納される。
【0043】
STEP:04 前記画像処理部24に於いて、前記画像記憶部26に格納された分割画像30が読出され、分割画像に関連付けられた水平角、鉛直角に基づき位置付けして並べられ、隣接する2つの分割画像30の一方を基準画像とし、オーバラップ部分の基準画像の画像の濃淡情報を用い基準画像と他方の画像とが同様のコントラストとなる様に、他方の画像のコントラストの調整を行って接続する。同様にして、全ての分割画像30が接続され、パノラマ画像31が合成される。
【0044】
尚、該パノラマ画像31の各分割画像30の画像中心位置(前記第1撮像部9の光軸位置)32は、前記水平測角部14、前記鉛直測角部16から水平角、高低角が求められ、更に各分割画像30中の任意の点は、前記画像中心位置32を基準とする水平、鉛直の画角から演算することで水平角、高低角が求められる。従って、前記パノラマ画像31の全域での、任意の点の高低角、水平角が演算により求められる。
【0045】
STEP:05 画像処理ソフトが起動され、前記各分割画像30についてエッジ処理等の画像処理され特徴点が抽出される。又、特徴点が抽出された画像が前記パノラマ画像上に重合される。尚、特徴点とは、例えばエッジ、コーナであり、エッジの検出には、例えばCannyオペレータを用い、コーナの検出にはHarisオペレータ等を使用する。又、特徴点の抽出は、前記パノラマ画像31中、STEP:02で設定した前記仮測定範囲29に対して行ってもよい。
【0046】
以下、例としてCANNYフィルタを使用した特徴抽出方法について説明する。
【0047】
CANNYフィルタとはノイズ除去を行った後に1次微分を行い、その結果が極大値となる画素を特徴(エッジ)とするものであり、原画像の濃淡値をI(x,y)、ガウス関数をG(x,y)とすると、CANNYフィルタによる出力値f(x,y)は(式1)にて表される。
【0048】
f(x,y)=D[G(x,y)×I(x,y)]=D[G(x,y)]×I(x,y) … (式1)
ここで、D[G(x,y)]=[(x2+y2)1/2/2πσ4]exp[−(x2+y2)/2σ2] … (式2)
【0049】
以下に示す2つの閾値T1、T2を設定することによりエッジ抽出が行われる。
【0050】
f(x,y)>T1、 f(x,y)/2σ0(x,y)>T2 … (式3)
ここで、σ02(x,y)=G′(x,y)×I2(x,y)−[G′(x,y)×I(x,y)]2 … (式4)
【0051】
尚、(式3)で表される閾値T1、T2はそれぞれエッジの高さ及びエッジの信頼度と呼ばれている。
【0052】
STEP:06 前記仮測定範囲29で指定された範囲内に含まれる特徴点が抽出され、特徴抽出後、抽出したコーナの最外郭部が結線され、本測定範囲33が自動的に設定される。抽出された特徴点、前記本測定範囲33は前記画像記憶部26に格納される。前記本測定範囲33が設定されることで、測定不能、或は測定に不適な部分、不測定部分34が除外される(図8参照)。前記本測定範囲33が設定され、特徴点が抽出されることで、測定は前記本測定範囲33の範囲内の特徴点について実行される。
【0053】
(式3)の閾値及び特徴点の間隔を指定することで、特徴点の抽出密度を変えることができる。従って、閾値、間隔により測定対象物に応じて特徴点の密度、即ち測定点の密度を設定することができ、必要な点のみを測定点として設定することができる。閾値の設定により得られた特徴点は、測定予定点35とされる。該測定予定点35は、前記パノラマ画像31上の位置から、画角が演算され、更に、画角から水平角、鉛直角が演算され、前記測定予定点35は水平角、鉛直角と関連付けられて前記画像記憶部26に格納される(図9参照)。
【0054】
尚、測定点の密度を設定するファクタとして、画像のコントラストを調整する等してもよい。
【0055】
STEP:07 前記本測定範囲33の設定、前記測定予定点35の抽出が完了すると、測定の為のシーケンスプログラムが起動実行される。前記制御演算部22が前記水平駆動部13、前記鉛直駆動部15を駆動制御し、前記第2撮像部12の光軸が前記測定予定点35に順次移動する様にスキャンする。
【0056】
STEP:08 前記第2撮像部12の光軸が前記測定予定点35に移動すると、前記撮像部選択部25により前記第2撮像部12に切替えられ、該第2撮像部12によって前記測定予定点35を中心とした撮像が行われ、撮像画像は前記表示部6に表示される。又、前記光軸が前記測定予定点35に移動すると、前記測距部17による測距が行われ、測距結果に基づき前記第2撮像部12、即ち前記第2望遠鏡11の焦点合せが行われる。尚、この場合の測距は前記第2望遠鏡11の焦点合せを目的とする測距であり、高精度は要求されない。
【0057】
焦点合せが完了すると、前記第2望遠鏡11を通して前記第2撮像部12により望遠画像が取得される。
【0058】
STEP:09 エッジ処理等の画像処理により、前記望遠画像中の特徴点、例えばコーナを抽出する。尚、エッジ処理した結果は前記パノラマ画像に重合してもよい。
【0059】
STEP:10 前記パノラマ画像31で得られた前記測定予定点35に基づき、前記望遠画像中抽出されたコーナの中から前記測定予定点35に該当するコーナを選定する。選定したコーナは測定点とされる。
【0060】
この場合、図1、図10に示される様に、前記第1撮像部9(前記第1望遠鏡8)の光軸と前記第2撮像部12(前記第2望遠鏡11)の光軸とは合致していないので、前記第1撮像部9で得られた位置情報のみでは、前記望遠画像上でのずれが生じる。このずれを補正するには、測定対象物迄の距離を測定し、得られた距離情報から下記の共線条件式で得られる画像座標を計算して補正する。尚、共線条件式は、基準データ(X,Y,Z)とカメラとの関係を示すものである。
【0061】
前記測量装置1が持つ機械原点に対する前記第1撮像部9の位置は既知であり、又前記第2撮像部12の光軸に対する機械原点に於ける前記第1撮像部9の光軸のずれ量、前記第2撮像部12の光軸に対する前記第1撮像部9の光軸の傾きもそれぞれ既知である。
【0062】
f:第1撮像部9の焦点、(x,y):第1撮像部9の画像中の座標(画像座標)、(X,Y,Z):基準点、(X0,Y0,Z0):第1撮像部9の撮影位置、a1〜a9:第1撮像部9の傾き、dx,dy:第1撮像部9のキャリブレーション補正項として共線条件式は以下に表される。
【0063】
x=−f{[a1(X−X0)+a2(Y−Y0)+a3(Z−Z0)]/[a7(X−X0)+a8(Y−Y0)+a9(Z−Z0)]}+dx
y=−f{[a4(X−X0)+a5(Y−Y0)+a6(Z−Z0)]/[a7(X−X0)+a8(Y−Y0)+a9(Z−Z0)]}+dy … (式5)
【0064】
更に、前記キャリブレーション補正項dx,dyに対しては下記の補正式が用いられる。
【0065】
dx=x0+x(k1r2+k2r4+k3r6+k4r8)+p1(r2+2x2)+2p2xy
dy=y0+y(k1r2+k2r4+k3r6+k4r8)+p2(r2+2y2)+2p1xy
ここで、x0,y0:主点位置、k1,k2,k3,k4:放射方向歪曲収差に関する係数、p1,p2:接線方向歪曲収差に関する係数、r=√(x2+y2):主点(x0,y0)からの距離を示す。
【0066】
共線条件式を用いる場合、カメラキャリブレーションを既知とすると、3点以上の基準点があれば、単写真の外部標定要素(位置、傾き)を求めることができる。写真測量では標定時の誤差を考慮して、4点以上の基準点を用い、最小2乗法で各々のパラメータを求め、画像座標から算出した3次元座標と元の基準点との誤差も算出する。
【0067】
STEP:11 選定された測定点について本測定が行われる。本測定で得られた測距データは測定点の水平角、鉛直角と共に前記望遠画像に関連付けられて前記画像記憶部26又は前記記憶部23に格納される。測定の完了した測定点については、前記パノラマ画像31上に点表示される。
【0068】
STEP:12 前記測定予定点35で、本測定の完了していないものがあるかどうかが判断され、ある場合は次の本測定の対象として残った前記測定予定点35が選定され、STEP:07〜STEP:11迄の測定が繰返し行われる。
【0069】
STEP:13 前記パノラマ画像31で抽出された全ての測定予定点35について測定(スキャン)が完了すると、全点が前記パノラマ画像31に表示され、測定点の漏れがないかがチェックされる。未測定の測定点は補測点として、前記画像記憶部26に記録される。又、画像上で測定作業者が補測点を指定して追加することも可能である。
【0070】
STEP:14 更に、補測点が自動的にスキャンされて、測定され、測定が終了する。
【0071】
上記した様に、本発明による測定では、測定の目的に応じた多点測定が可能であり、例えば、地図作製の為の測定では、輪郭等必要部分、必要箇所だけの測定となり、測定点が大幅に削減でき、更に、空等、従来の自動測定では測定不能でエラーとなっていた箇所が除外され、測定の効率化が図れる。
【0072】
又、トータルステーションを用いた多点自動測定が可能であるので、測定点について平均測距が行われ、高精度の測定データが取得できる。
【図面の簡単な説明】
【0073】
【図1】本発明が実施される測量装置の一例を示す斜視図である。
【図2】該測量装置の構成ブロック図である。
【図3】本発明の測定の流れを示すフローチャートである。
【図4】測定の流れに対応した画像を示す説明図である。
【図5】測定の流れに対応した画像を示す説明図である。
【図6】測定の流れに対応した画像を示す説明図である。
【図7】測定の流れに対応した画像を示す説明図である。
【図8】測定の流れに対応した画像を示す説明図である。
【図9】測定の流れに対応した画像を示す説明図である。
【図10】第1撮像部と第2撮像部の位置関係を示す説明図である。
【符号の説明】
【0074】
1 測量装置
4 托架部
5 望遠鏡部
6 表示部
7 操作入力部
8 第1望遠鏡
9 第1撮像部
10 照星照門
11 第2望遠鏡
12 第2撮像部
13 水平駆動部
14 水平測角部
15 鉛直駆動部
17 測距部
21 制御装置
22 制御演算部
23 記憶部
24 画像処理部
25 撮像部選択部
26 画像記憶部
【特許請求の範囲】
【請求項1】
測定対象物を含む画像を取得するステップと、該画像を処理して測定対象物の特徴点を抽出して測定予定点とするステップと、該測定予定点をスキャンし該測定予定点の望遠画像を取得するステップと、該望遠画像から前記測定予定点に対応する点を測定点として抽出するステップと、該測定点について測距を行うステップとを有することを特徴とする多点測定方法。
【請求項2】
測定対象物を含む画像を取得するステップが、該測定対象物を含む広範囲のパノラマ画像を取得するステップである請求項1の多点測定方法。
【請求項3】
測定対象物を含む仮測定範囲を設定するステップと、前記望遠画像より広角の広角画像により前記仮測定範囲の画像を分割して取得するステップと、広角画像を合成して前記パノラマ画像を取得するステップを有する請求項2の多点測定方法。
【請求項4】
前記測定予定点はエッジ処理によって求める請求項1又は請求項2の多点測定方法。
【請求項5】
エッジ処理に於ける閾値を設定することで、前記測定予定点の密度を選択する請求項4の多点測定方法。
【請求項6】
エッジ処理に於ける特徴点の間隔を指定することで前記測定予定点の密度を選択する請求項4の多点測定方法。
【請求項7】
エッジ処理は広角画像若しくは望遠画像に対して行われ、エッジ処理で得られた特徴点は前記パノラマ画像上に重合されるステップを含む請求項3の多点測定方法。
【請求項8】
特徴点から測定対象物の最外郭部を結線して本測定範囲を設定するステップを有する請求項1又は請求項2の多点測定方法。
【請求項9】
前記測定予定点のスキャンは前記本測定範囲について実行される請求項8の多点測定方法。
【請求項10】
前記測距は、同一測定点で所定回数実行されて得られる平均測距である請求項1又は請求項2の多点測定方法。
【請求項11】
測定済測定点を画像上に表示する請求項1又は請求項2の多点測定方法。
【請求項12】
広角画像を取得する第1撮像部と前記広角画像より高倍率の望遠画像を取得する第2撮像部とを有する望遠鏡部と、測距光を射出し、測定対象物からの反射光を受光して測距を行う測距部と、前記望遠鏡部の水平角、鉛直角を検出する測角部と、前記望遠鏡部を水平方向、鉛直方向に回転駆動する駆動部と、前記第1撮像部、前記第2撮像部の撮像を制御し、前記測角部からの検出結果に基づき前記駆動部を制御する制御装置とを具備し、該制御装置は前記第1撮像部で得られる前記広角画像を接続してパノラマ画像を合成し、前記広角画像をエッジ処理して測定予定点を設定し、該測定予定点をスキャンして各測定予定点について前記第2撮像部により前記望遠画像を取得して望遠画像中から前記測定予定点に対応する測定点を抽出し、該測定点について測距を行う様構成したことを特徴とする測量装置。
【請求項13】
前記制御装置は、前記測定点の水平角、鉛直角を演算し、測定点の3次元データを取得する請求項12の測量装置。
【請求項14】
前記望遠鏡部を離隔した2点に向けることで、2点を対角線とする矩形の仮測定範囲が設定される様にした請求項12の測量装置。
【請求項15】
前記制御装置は、前記仮測定範囲の特徴点から測定対象物の最外郭部を結線して本測定範囲を設定し、該本測定範囲をスキャンする様前記駆動部を制御する請求項14の測量装置。
【請求項16】
前記測距部は同一測定点に対して所要回数測距を行い、平均値を測距結果とする請求項12の測量装置。
【請求項1】
測定対象物を含む画像を取得するステップと、該画像を処理して測定対象物の特徴点を抽出して測定予定点とするステップと、該測定予定点をスキャンし該測定予定点の望遠画像を取得するステップと、該望遠画像から前記測定予定点に対応する点を測定点として抽出するステップと、該測定点について測距を行うステップとを有することを特徴とする多点測定方法。
【請求項2】
測定対象物を含む画像を取得するステップが、該測定対象物を含む広範囲のパノラマ画像を取得するステップである請求項1の多点測定方法。
【請求項3】
測定対象物を含む仮測定範囲を設定するステップと、前記望遠画像より広角の広角画像により前記仮測定範囲の画像を分割して取得するステップと、広角画像を合成して前記パノラマ画像を取得するステップを有する請求項2の多点測定方法。
【請求項4】
前記測定予定点はエッジ処理によって求める請求項1又は請求項2の多点測定方法。
【請求項5】
エッジ処理に於ける閾値を設定することで、前記測定予定点の密度を選択する請求項4の多点測定方法。
【請求項6】
エッジ処理に於ける特徴点の間隔を指定することで前記測定予定点の密度を選択する請求項4の多点測定方法。
【請求項7】
エッジ処理は広角画像若しくは望遠画像に対して行われ、エッジ処理で得られた特徴点は前記パノラマ画像上に重合されるステップを含む請求項3の多点測定方法。
【請求項8】
特徴点から測定対象物の最外郭部を結線して本測定範囲を設定するステップを有する請求項1又は請求項2の多点測定方法。
【請求項9】
前記測定予定点のスキャンは前記本測定範囲について実行される請求項8の多点測定方法。
【請求項10】
前記測距は、同一測定点で所定回数実行されて得られる平均測距である請求項1又は請求項2の多点測定方法。
【請求項11】
測定済測定点を画像上に表示する請求項1又は請求項2の多点測定方法。
【請求項12】
広角画像を取得する第1撮像部と前記広角画像より高倍率の望遠画像を取得する第2撮像部とを有する望遠鏡部と、測距光を射出し、測定対象物からの反射光を受光して測距を行う測距部と、前記望遠鏡部の水平角、鉛直角を検出する測角部と、前記望遠鏡部を水平方向、鉛直方向に回転駆動する駆動部と、前記第1撮像部、前記第2撮像部の撮像を制御し、前記測角部からの検出結果に基づき前記駆動部を制御する制御装置とを具備し、該制御装置は前記第1撮像部で得られる前記広角画像を接続してパノラマ画像を合成し、前記広角画像をエッジ処理して測定予定点を設定し、該測定予定点をスキャンして各測定予定点について前記第2撮像部により前記望遠画像を取得して望遠画像中から前記測定予定点に対応する測定点を抽出し、該測定点について測距を行う様構成したことを特徴とする測量装置。
【請求項13】
前記制御装置は、前記測定点の水平角、鉛直角を演算し、測定点の3次元データを取得する請求項12の測量装置。
【請求項14】
前記望遠鏡部を離隔した2点に向けることで、2点を対角線とする矩形の仮測定範囲が設定される様にした請求項12の測量装置。
【請求項15】
前記制御装置は、前記仮測定範囲の特徴点から測定対象物の最外郭部を結線して本測定範囲を設定し、該本測定範囲をスキャンする様前記駆動部を制御する請求項14の測量装置。
【請求項16】
前記測距部は同一測定点に対して所要回数測距を行い、平均値を測距結果とする請求項12の測量装置。
【図1】


【図2】
【図3】
【図10】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図10】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2008−268004(P2008−268004A)
【公開日】平成20年11月6日(2008.11.6)
【国際特許分類】
【出願番号】特願2007−111896(P2007−111896)
【出願日】平成19年4月20日(2007.4.20)
【出願人】(000220343)株式会社トプコン (904)
【公開日】平成20年11月6日(2008.11.6)
【国際特許分類】
【出願日】平成19年4月20日(2007.4.20)
【出願人】(000220343)株式会社トプコン (904)
[ Back to top ]