
多目標追尾装置
【課題】許容可能な処理時間で、正確な追尾結果を得ることができる多目標追尾装置を得る。
【解決手段】予測計算を行う仮航跡と観測値の組み合わせを決定する観測値選別部1と、前記観測値選別部1により決定された仮航跡と観測値の組み合わせについて、仮航跡を観測値の時刻によって予測計算する予測処理部22と、仮航跡と観測値が対応付け可能かを、前記予測処理部22が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部23と、観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部24と、前記航跡尤度評価部24が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部25と、仮航跡の予測諸元と前記相関決定部25により対応付けられた観測値を使って平滑諸元を計算する平滑処理部26と、仮航跡のうち尤度が高いものを目標航跡とする航跡決定部27とを設けた。
【解決手段】予測計算を行う仮航跡と観測値の組み合わせを決定する観測値選別部1と、前記観測値選別部1により決定された仮航跡と観測値の組み合わせについて、仮航跡を観測値の時刻によって予測計算する予測処理部22と、仮航跡と観測値が対応付け可能かを、前記予測処理部22が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部23と、観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部24と、前記航跡尤度評価部24が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部25と、仮航跡の予測諸元と前記相関決定部25により対応付けられた観測値を使って平滑諸元を計算する平滑処理部26と、仮航跡のうち尤度が高いものを目標航跡とする航跡決定部27とを設けた。
【発明の詳細な説明】
【技術分野】
【0001】
捜索レーダ等のセンサシステムにおいて、一定領域内にある目標位置を観測するセンサから目標の観測値を使って仮航跡を生成する追尾開始技術が必要となる。この発明は、この追尾開始において、センサのサーチ内で観測時刻にずれが生じる場合に、現実的な処理時間で目標航跡を追尾開始する多目標追尾装置に関するものである。
【背景技術】
【0002】
センサにより一定領域内をサーチして得られた観測値を使って目標の追尾開始を行う技術については、すでに多くの論文、特許等の文献で取り挙げられており、その装置および方法については様々な提案がなされている。
【0003】
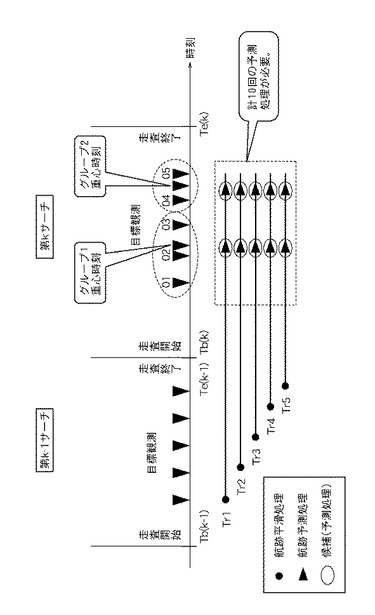
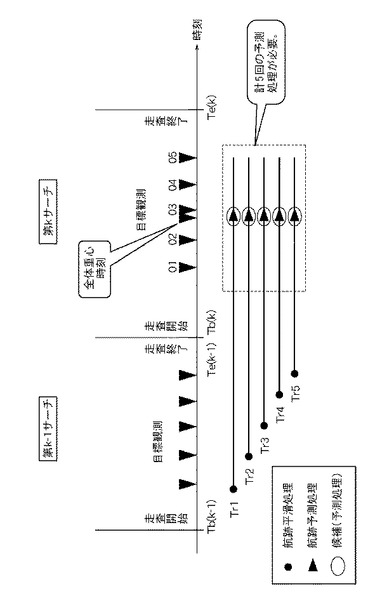
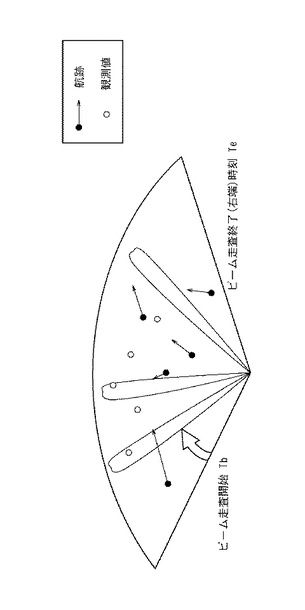
目標追尾では、仮航跡の予測位置と観測位置を比較することによって仮航跡と観測値の対応付けが可能か否か(相関の有無)を判定する。通常の仮航跡の予測位置の計算では、仮航跡の最新時刻における平滑諸元を観測値の時刻へ外挿する計算を行う。捜索レーダによる観測の場合、図23の例の様に1サーチ内でもビームが到達する時刻によって観測値が得られる時刻は異なる。この相違のため、仮航跡の予測処理における予測時刻は観測値の数だけ発生する。
【0004】
この様な観測値を使って追尾開始処理を行う場合の従来の多目標追尾装置について図21から図24までを参照しながら説明する。図21は、従来の多目標追尾装置の構成を示すブロック図である。図22は、従来の多目標追尾装置の動作を示すフローチャートである。図23は、従来の多目標追尾装置におけるサーチ領域を示す図である。図24は、従来の多目標追尾装置の観測時刻と仮航跡の予測時刻の関係を示すタイミングチャートである。
【0005】
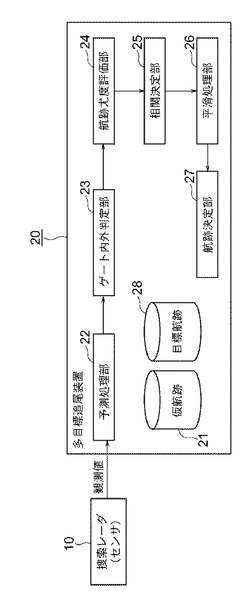
図21において、従来の多目標追尾装置20は、時刻、予測諸元を含む仮航跡を複数個格納する仮航跡ファイル21と、予測処理部22と、ゲート内外判定部23と、航跡尤度評価部24と、相関決定部25と、平滑処理部26と、航跡決定部27と、目標航跡を格納する目標航跡ファイル28とが設けられている。
【0006】
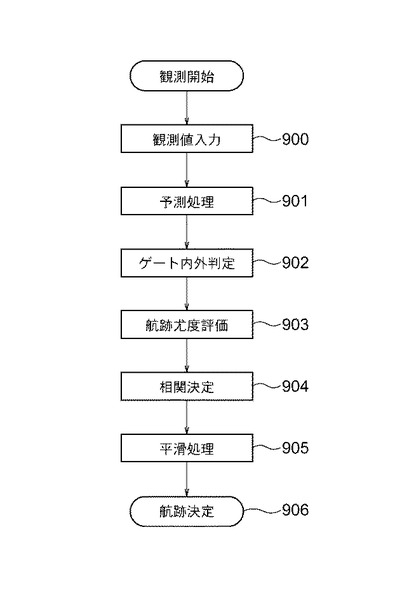
「観測値入力」ステップ900において、捜索レーダ(センサ)10から観測値が入力されると、まず、「予測処理」ステップ901において、予測処理部22は、仮航跡について観測値の時刻における予測位置と予測誤差共分散の計算を行う。
【0007】
次に、「ゲート内外判定」ステップ902において、ゲート内外判定部23は、仮航跡と観測値が対応付けられる可能性を、仮航跡の予測誤差共分散と観測値の観測誤差共分散を使ったカイ平方検定によって判定する。
【0008】
次に、「航跡尤度評価」ステップ903において、航跡尤度評価部24は、仮航跡と前ステップでゲート内にあると判定された観測値の組み合わせに対して、その組み合わせにより観測値を仮航跡に割り当てた場合の仮航跡の尤度を計算する。
【0009】
次に、「相関決定」ステップ904において、相関決定部25は、観測値と仮航跡の組み合わせのどれを最終的に選択するか、前ステップで計算された尤度を基に決定する。
【0010】
次に、「平滑処理」ステップ905において、平滑処理部26は、前ステップで決定された相関結果を基に、仮航跡の予測諸元と組み合わされた観測値を使って平滑諸元を計算する。すなわち、仮航跡ファイル21に格納されている仮航跡の時刻を最新時刻の値に更新する。
【0011】
そして、「航跡決定」ステップ906において、航跡決定部27は、仮航跡の尤度や観測値との相関回数を基に、仮航跡を目標航跡と見做すかどうか、決定する。決定した目標航跡を目標航跡ファイル28に格納する。
【0012】
また、捜索レーダを想定した1サーチ内での観測値の時刻ずれに起因する演算負荷増大の問題を解消するための従来の他の目標追尾装置が提案されている(例えば、特許文献1参照)。この目標追尾装置では、観測領域を事前に分割し、分割領域毎に追尾処理を行うことによって演算負荷の削減を図っている。
【0013】
【特許文献1】特開2004−233136号公報
【発明の開示】
【発明が解決しようとする課題】
【0014】
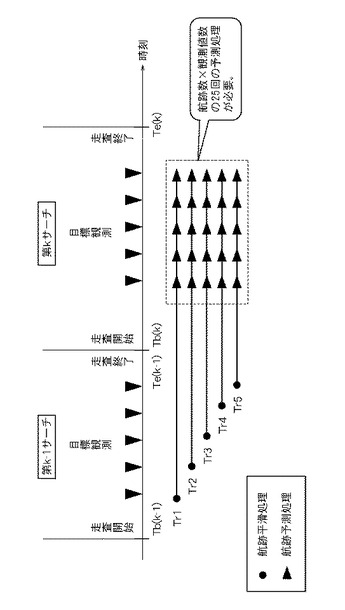
上述したような従来の多目標追尾装置では、時刻ずれがある1サーチ分の観測値を処理しようとすると、1サーチの追尾開始処理において必要な予測処理回数は「仮航跡数×観測値数」となる。図23に示す観測例では、図24に示すタイミングチャートの様に計25回の予測処理が必要となる。予測処理に起因する演算負荷は、目標数が多い程高くなり、現実的な処理時間内での追尾開始が困難となる。
【0015】
また、時刻ずれ観測値の処理時間短縮を図った従来の他の目標追尾装置では、目標航跡が分割領域の境界を跨って運動する場合に正確な追尾を行うことができないという問題点があった。
【0016】
この発明は、上述のような課題を解決するためになされたもので、その目的は、許容可能な処理時間で、正確な追尾結果を得ることができる多目標追尾装置を得るものである。
【課題を解決するための手段】
【0017】
この発明に係る多目標追尾装置は、センサで観測領域をサーチすることによって得られた観測値を使って目標航跡を作る多目標追尾装置であって、予測計算を行う仮航跡と観測値の組み合わせを決定する観測値選別部と、前記観測値選別部により決定された仮航跡と観測値の組み合わせについて、仮航跡を観測値の時刻によって予測計算する予測処理部と、仮航跡と観測値が対応付け可能かを、前記予測処理部が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部と、観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部と、前記航跡尤度評価部が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部と、仮航跡の予測諸元と前記相関決定部により対応付けられた観測値を使って平滑諸元を計算する平滑処理部と、仮航跡のうち尤度が高いものを目標航跡とする航跡決定部とを設けたものである。
【発明の効果】
【0018】
この発明に係る多目標追尾装置は、許容可能な処理時間で、正確な追尾結果を得ることができるという効果を奏する。
【発明を実施するための最良の形態】
【0019】
実施の形態1.
この発明の実施の形態1に係る多目標追尾装置について図1から図4までを参照しながら説明する。図1は、この発明の実施の形態1に係る多目標追尾装置の構成を示すブロック図である。なお、以降では、各図中、同一符号は同一又は相当部分を示す。
【0020】
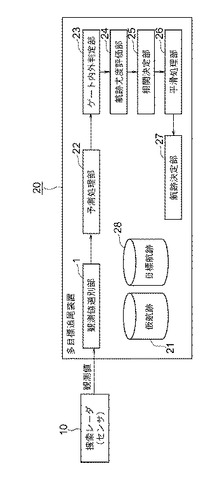
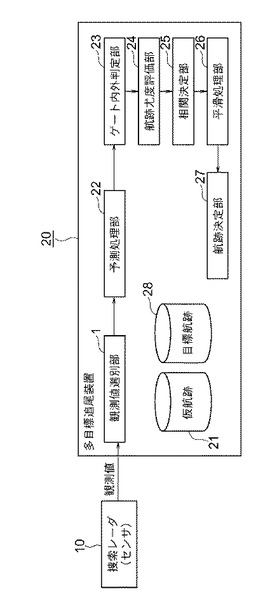
図1において、この実施の形態1に係る多目標追尾装置20は、観測値選別部1と、時刻、予測諸元を含む仮航跡を複数個格納する仮航跡ファイル21と、予測処理部22と、ゲート内外判定部23と、航跡尤度評価部24と、相関決定部25と、平滑処理部26と、航跡決定部27と、目標航跡を格納する目標航跡ファイル28とが設けられている。
【0021】
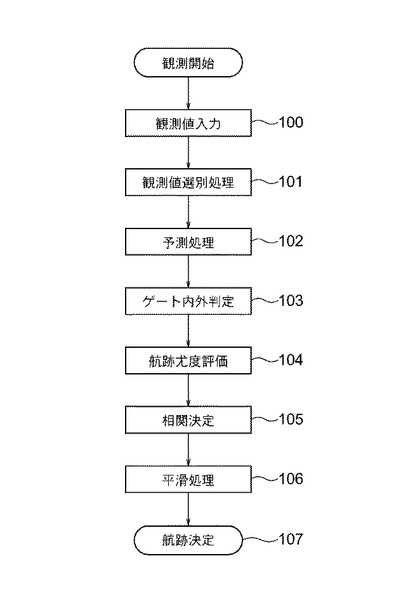
つぎに、この実施の形態1に係る多目標追尾装置の動作について図面を参照しながら説明する。図2は、この発明の実施の形態1に係る多目標追尾装置の動作を示すフローチャートである。図3は、この発明の実施の形態1に係る多目標追尾装置におけるサーチ領域を示す図である。図4は、この発明の実施の形態1に係る多目標追尾装置の観測時刻と仮航跡の予測時刻の関係を示すタイミングチャートである。
【0022】
「観測値入力」ステップ100において、捜索レーダ(センサ)10から観測値が入力されると、まず「観測値選別処理」ステップ101において、観測値選別部1は、仮航跡に対して、予測処理を行う観測値を選別する。この選別では、仮航跡と観測値の全ての組み合わせについて、その組み合わせを相関の候補とするか否かを判定する。ある仮航跡とある観測値の組み合わせについての判定は、以下の4方式の何れかとする。
【0023】
(1−1)観測値の観測時刻と仮航跡の前サーチにおける平滑時刻の差が、閾値(第1の閾値)を超えない場合にその観測値を候補とする。すなわち、以下の不等式(1)が成立するときに候補とする。
【0024】
【数1】

【0025】
ここで、ΔTは観測時刻と仮航跡の平滑時刻の差であり、Tsearchはサーチにかかる時間、thTは事前に設定する閾値(第1の閾値)である。すなわち、観測値選別部1は、入力される観測値に含まれる観測時刻と、仮航跡ファイル21から読み出した仮航跡に含まれる平滑時刻とからΔTを求める。また、求めたΔTと、捜索レーダ(センサ)10から入手したTsearchから、観測値の観測時刻と仮航跡の前サーチにおける平滑時刻の差を求める。次に、求めた観測値の観測時刻と仮航跡の前サーチにおける平滑時刻の差が、閾値thT未満の場合には、その観測値を選別する。
【0026】
(1−2)図3に示す様に、観測値の時刻と仮航跡の前サーチにおける平滑時刻の差が、サーチの角速度とサーチにかかる時間と目標の最大角速度から求めた許容時間差を越えない場合に、その観測値を候補とする。この場合の判定式(2)は以下のようになる。
【0027】
【数2】
【0028】
ここで、ΔTは観測時刻と仮航跡の平滑時刻の差であり、Tsearchはサーチにかかる時間、vAz_maxは事前に設定する目標の最大角速度、vsearchはサーチの角速度である。すなわち、観測値選別部1は、入力される観測値に含まれる観測時刻と、仮航跡ファイル21から読み出した仮航跡に含まれる平滑時刻とからΔTを求める。また、求めたΔTと、捜索レーダ(センサ)10から入手したTsearchから、観測値の観測時刻と仮航跡の前サーチにおける平滑時刻の差を求める。さらに、目標の最大角速度と、捜索レーダ(センサ)10から入手したTsearch、vsearchから、式(2)の右辺の値を求める。次に、求めた観測値の観測時刻と仮航跡の前サーチにおける平滑時刻の差が、式(2)の右辺の値未満の場合には、その観測値を選別する。
【0029】
(1−3)上記の(1−2)の判定に加え、さらに観測値と仮航跡の距離差も判定に加える。すなわち、式(2)の条件に加えて、以下の式(3)の条件も成立する場合に限って、その観測値を候補とする。
【0030】
【数3】
【0031】
ここで、RTは仮航跡の前サーチの平滑時刻からTsearch(1サーチにかかる時間)後の位置から計算したセンサからの距離、ROは観測値のセンサからの距離であり、thRは事前に設定する閾値(第2の閾値)である。すなわち、観測値選別部1は、仮航跡ファイル21から読み出した仮航跡に含まれる前サーチの平滑時刻と、捜索レーダ(センサ)10から入手したTsearchとからRTを求める。また、求めたRTと、入力される観測値に含まれるROをから、観測値と仮航跡の距離差を求める。次に、求めた観測値の観測時刻と仮航跡の前サーチにおける平滑時刻の差が、式(2)の右辺の値未満の場合で、かつ、観測値と仮航跡の距離差が、閾値thR未満の場合には、その観測値を選別する。
【0032】
(1−4)上記の判定式(2)において、vAz_maxを事前設定のパラメータでなく、前サーチで計算された仮航跡の速度の中の最大の値とする。すなわち、観測値選別部1は、仮航跡ファイル21から読み出した仮航跡に含まれる速度の中の最大値を求める。また、入力される観測値に含まれる観測時刻と、仮航跡ファイル21から読み出した仮航跡に含まれる平滑時刻とからΔTを求める。また、求めたΔTと、捜索レーダ(センサ)10から入手したTsearchから、観測値の観測時刻と仮航跡の前サーチにおける平滑時刻の差を求める。さらに、求めた仮航跡の速度の中の最大の値と、捜索レーダ(センサ)10から入手したTsearch、vsearchから、式(2)の右辺の値を求める。次に、求めた観測値の観測時刻と仮航跡の前サーチにおける平滑時刻の差が、式(2)の右辺の値未満の場合には、その観測値を選別する。
【0033】
次に、「予測処理」ステップ102において、予測処理部22は、仮航跡について観測値の観測時刻における予測位置と予測誤差共分散の計算を行う。ただし、ある仮航跡と、その仮航跡について前ステップで候補と判定されなかった観測値に対する予測計算は行わない。
【0034】
次に、「ゲート内外判定」ステップ103において、ゲート内外判定部23は、仮航跡と観測値が対応付けられる可能性を、仮航跡の予測誤差共分散と観測値の観測誤差共分散を使ったカイ平方検定によって判定する。
【0035】
次に、「航跡尤度評価」ステップ104において、航跡尤度評価部24は、仮航跡と前ステップでゲート内にあると判定された観測値の組み合わせに対して、その組み合わせにより観測値を仮航跡に割り当てた場合の仮航跡の尤度を計算する。
【0036】
次に、「相関決定」ステップ105において、相関決定部25は、観測値と仮航跡の組み合わせのどれを最終的に選択するか、前ステップで計算された尤度を基に決定する。
【0037】
次に、「平滑処理」ステップ106において、平滑処理部26は、前ステップで決定された相関結果を基に、仮航跡の予測諸元と組み合わされた観測値を使って平滑諸元を計算する。すなわち、仮航跡ファイル21に格納されている仮航跡の時刻を最新時刻の値に更新する。
【0038】
そして、「航跡決定」ステップ107において、航跡決定部27は、仮航跡の尤度や観測値との相関回数を基に、仮航跡を目標航跡と見做すかどうか、決定する。決定した目標航跡を目標航跡ファイル28に格納する。
【0039】
本実施の形態1に係る多目標追尾装置を図23に示す観測例に適用した場合(図上、左から1番目〜5番目の仮航跡、1番目〜5番目の観測値とする。)、1番目の仮航跡について1番目〜3番目の観測値が上記の判定式(2)を満たし、2番目の仮航跡について2番目〜4番目の観測値が上記の判定式(2)を満たし、3番目の仮航跡について3番目〜4番目の観測値が上記の判定式(2)を満たし、4番目の仮航跡について4番目〜5番目の観測値が上記の判定式(2)を満たし、5番目の仮航跡について3番目〜4番目の観測値が上記の判定式(2)を満たしていると、図4のタイムチャートに示す様に計12回の予測計算が必要となる。これは従来方式で必要な予測計算回数25回よりも少ない。
【0040】
すなわち、この実施の形態1に係る多目標追尾装置は、センサ10で観測領域をサーチすることによって得られた観測値を使って目標航跡を作る多目標追尾装置であって、予測計算を行う仮航跡と観測値の組み合わせを決定する観測値選別部1と、前記観測値選別部1により決定された仮航跡と観測値の組み合わせについて、仮航跡を観測値の時刻によって予測計算する予測処理部22と、仮航跡と観測値が対応付け可能かを、前記予測処理部22が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部23と、観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部24と、前記航跡尤度評価部24が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部25と、仮航跡の予測諸元と前記相関決定部25により対応付けられた観測値を使って平滑諸元を計算する平滑処理部26と、仮航跡のうち尤度が高いものを目標航跡とする航跡決定部27とを設けたものである。
【0041】
以上の様に、この実施の形態1に係る多目標追尾装置によれば、各仮航跡に対して予測処理を行う観測値を選別する前処理を行うので、処理負荷が軽減される。よって、目標数が多い場合でも対処可能となる。
【0042】
実施の形態2.
この発明の実施の形態2に係る多目標追尾装置について図5から図9までを参照しながら説明する。図5は、この発明の実施の形態2に係る多目標追尾装置の構成を示すブロック図である。
【0043】
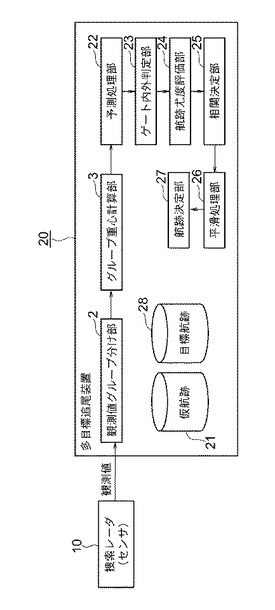
図5において、この実施の形態2に係る多目標追尾装置20は、観測値グループ分け部2と、グループ重心計算部3と、時刻、予測諸元を含む仮航跡を複数個格納する仮航跡ファイル21と、予測処理部22と、ゲート内外判定部23と、航跡尤度評価部24と、相関決定部25と、平滑処理部26と、航跡決定部27と、目標航跡を格納する目標航跡ファイル28とが設けられている。
【0044】
つぎに、この実施の形態2に係る多目標追尾装置の動作について図面を参照しながら説明する。図6は、この発明の実施の形態2に係る多目標追尾装置の動作を示すフローチャートである。図7は、この発明の実施の形態2に係る多目標追尾装置におけるサーチ領域を示す図である。図8は、この発明の実施の形態2に係る多目標追尾装置の観測値グループ分け部の同一グループ判定を説明するための図である。図9は、この発明の実施の形態2に係る多目標追尾装置の観測時刻と仮航跡の予測時刻の関係を示すタイミングチャートである。
【0045】
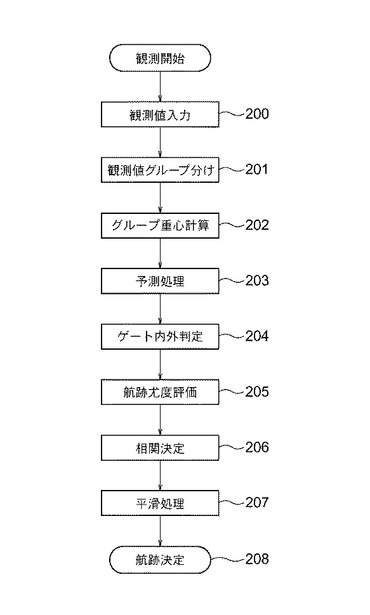
「観測値入力」ステップ200において、捜索レーダ(センサ)10から観測値が入力されると、まず、「観測値グループ分け」ステップ201において、観測値グループ分け部2は、距離の近い観測値同士でグループ化する。ある観測値と別の観測値の組み合わせについての同一グループ判定は以下の3方式の何れかとする。
【0046】
(2−1)2つの観測値の観測時刻の差が、閾値(第3の閾値)を超えない場合にその観測値を候補とする。すなわち、以下の不等式(4)が成立するときに候補とする。
【0047】
【数4】
【0048】
ここで、ΔTは2つの観測値の観測時刻の差であり、thTは事前に設定する閾値(第3の閾値)である。すなわち、観測値グループ分け部2は、入力される観測値に含まれる観測時刻から、2つの観測値の観測時刻の差を求める。次に、求めた2つの観測値の観測時刻の差が、閾値thT未満の場合には、これらの2つの観測値を同一グループと判定する。
【0049】
(2−2)図8に示す様に、2つの観測値の観測時刻の差が、サーチの角速度とサーチにかかる時間と目標の最大角速度から求めた許容時間差を越えない場合に、その観測値を候補とする。この場合の判定式(5)は以下のようになる。
【0050】
【数5】
【0051】
ここで、ΔTは2つの観測値の時刻の差であり、Tsearchはサーチにかかる時間、vAz_maxは事前に設定する目標の最大角速度、vsearchはサーチの角速度である。すなわち、観測値グループ分け部2は、入力される観測値に含まれる観測時刻から、2つの観測値の観測時刻の差を求める。また、目標の最大角速度と、捜索レーダ(センサ)10から入手したTsearch、vsearchから、式(5)の右辺を求める。次に、求めた2つの観測値の観測時刻の差が、式(5)の右辺の値未満の場合には、これらの2つの観測値を同一グループと判定する。
【0052】
(2−3)上記の(2−2)の判定に加え、さらに、2つの観測値の距離差も判定に加える。すなわち、式(5)の条件に加えて、以下の式(6)の条件も成立する場合に限って、その観測値を候補とする。
【0053】
【数6】
【0054】
ここで、ΔRは2つの観測値の距離差、thRは事前に設定する閾値(第4の閾値)である。すなわち、観測値グループ分け部2は、入力される観測値に含まれる観測時刻から、2つの観測値の観測時刻の差を求める。また、目標の最大角速度と、捜索レーダ(センサ)10から入手したTsearch、vsearchから、式(5)の右辺を求める。さらに、入力される観測値に含まれる距離から、2つの観測値の距離差を求める。次に、求めた2つの観測値の観測時刻の差が、式(5)の右辺の値未満の場合で、かつ、求めた2つの観測値の距離差が、閾値thR未満の場合には、これらの2つの観測値を同一グループと判定する。
【0055】
次に、「グループ重心計算」ステップ202において、グループ重心計算部3は、グループに所属する観測値群の重心の位置に相当する観測時刻を計算する(以下、重心時刻と呼ぶ)。グループ重心計算部3は、入力される観測値に含まれる位置、観測時刻から、平均などにより、同じグループに所属する観測値群の重心の位置を求め、重心の位置に対応する観測時刻、つまり重心時刻を求める。
【0056】
次に、「予測処理」ステップ203において、予測処理部22は、仮航跡について観測値が所属するグループの重心時刻における予測位置と予測誤差共分散の計算を行う。
【0057】
次に、「ゲート内外判定」ステップ204において、ゲート内外判定部23は、仮航跡と観測値が対応付けられる可能性を、仮航跡の予測誤差共分散と観測値の観測誤差共分散を使ったカイ平方検定によって判定する。
【0058】
次に、「航跡尤度評価」ステップ205において、航跡尤度評価部24は、仮航跡と前ステップでゲート内にあると判定された観測値の組み合わせに対して、その組み合わせにより観測値を仮航跡に割り当てた場合の仮航跡の尤度を計算する。
【0059】
次に、「相関決定」ステップ206において、相関決定部25は、観測値と仮航跡の組み合わせのどれを最終的に選択するか、前ステップで計算された尤度を基に決定する。
【0060】
次に、「平滑処理」ステップ207において、平滑処理部26は、前ステップで決定された相関結果を基に、仮航跡の予測諸元と組み合わされた観測値を使って平滑諸元を計算する。すなわち、仮航跡ファイル21に格納されている仮航跡の時刻を最新時刻の値に更新する。
【0061】
そして、「航跡決定」ステップ208において、航跡決定部27は、仮航跡の尤度や観測値との相関回数を基に、仮航跡を目標航跡と見做すかどうか、決定する。決定した目標航跡を目標航跡ファイル28に格納する。
【0062】
本実施の形態2に係る多目標追尾装置を図23に示す観測例に適用した場合、図7の様にグループが2つできるとすると、図9のタイムチャートに示す様に、仮航跡数×グループ数(5×2)の計10回の予測計算が必要となる。これは従来方式で必要な予測計算回数25回よりも少ない。
【0063】
すなわち、この実施の形態2に係る多目標追尾装置は、センサ10で観測領域をサーチすることによって得られた観測値を使って目標航跡を作る多目標追尾装置であって、1サーチで得られた観測値群をグループ分けする観測値グループ分け部2と、グループ毎にグループの重心位置に相当する観測時刻である重心時刻を計算するグループ重心計算部3と、仮航跡と観測値の組み合わせについて、仮航跡を観測値が所属するグループの前記重心時刻によって予測計算する予測処理部22と、仮航跡と観測値が対応付け可能かを、前記予測処理部22が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部23と、観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部24と、前記航跡尤度評価部24が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部25と、仮航跡の予測諸元と前記相関決定部25により対応付けられた観測値を使って平滑諸元を計算する平滑処理部26と、仮航跡のうち尤度が高いものを目標航跡とする航跡決定部27とを設けたものである。
【0064】
以上の様に、この実施の形態2に係る多目標追尾装置によれば、観測値をグループ化してその重心時刻で各仮航跡に対する予測処理を行うので、処理負荷が軽減される。よって、目標数が多い場合でも対処可能となる。
【0065】
実施の形態3.
この発明の実施の形態3に係る多目標追尾装置について図10から図13までを参照しながら説明する。図10は、この発明の実施の形態3に係る多目標追尾装置の構成を示すブロック図である。
【0066】
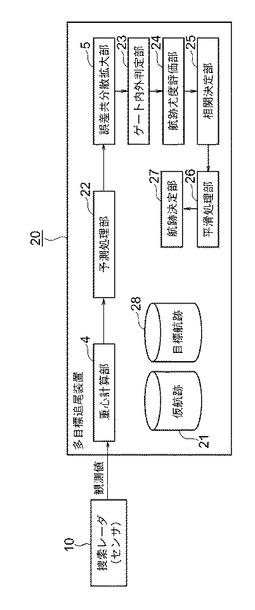
図10において、この実施の形態3に係る多目標追尾装置20は、重心計算部4と、誤差共分散拡大部5と、時刻、予測諸元を含む仮航跡を複数個格納する仮航跡ファイル21と、予測処理部22と、ゲート内外判定部23と、航跡尤度評価部24と、相関決定部25と、平滑処理部26と、航跡決定部27と、目標航跡を格納する目標航跡ファイル28とが設けられている。
【0067】
つぎに、この実施の形態3に係る多目標追尾装置の動作について図面を参照しながら説明する。図11は、この発明の実施の形態3に係る多目標追尾装置の動作を示すフローチャートである。図12は、この発明の実施の形態3に係る多目標追尾装置におけるサーチ領域を示す図である。図13は、この発明の実施の形態3に係る多目標追尾装置の観測時刻と仮航跡の予測時刻の関係を示すタイミングチャートである。
【0068】
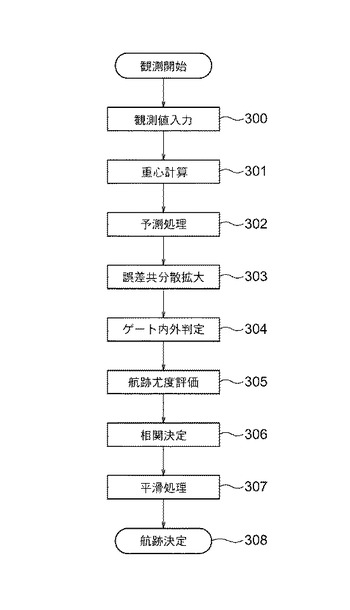
「観測値入力」ステップ300において、捜索レーダ(センサ)10から観測値が入力されると、まず、「重心計算」ステップ301において、重心計算部4は、得られた全観測値の重心の位置に相当する観測時刻を計算する(以下、全体重心時刻と呼ぶ)。重心計算部4は、入力される観測値に含まれる位置、観測時刻から、平均などにより、全観測値の重心の位置を求め、重心の位置に対応する観測時刻、つまり全体重心時刻を求める。
【0069】
次に、「予測処理」ステップ302において、予測処理部22は、仮航跡について全体重心時刻における予測位置と予測誤差共分散の計算を行う。
【0070】
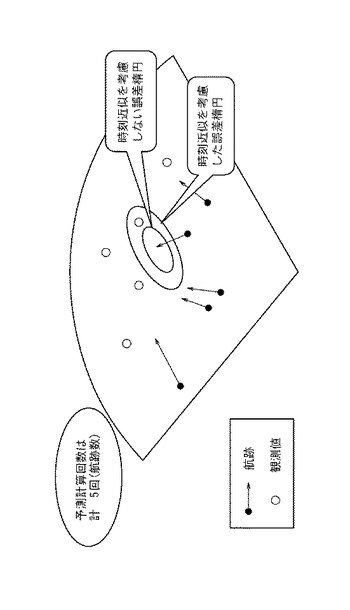
次に、「誤差共分散拡大」ステップ303において、誤差共分散拡大部5は、全体重心時刻で予測処理したことによる誤差分を考慮して、予測誤差共分散行列を拡大する。この拡大分の計算は以下のいずれかとする。
【0071】
(3−1)事前に設定されたパラメータである目標の最大角速度をvmax、全体重心時刻と各観測値の観測時刻の差の最大値をΔtmaxとすると、予測誤差共分散の拡大分をvmaxΔtmaxとする。すなわち、誤差共分散拡大部5は、入力される観測値に含まれる観測時刻から、ステップ301で求めた全体重心時刻と各観測値の観測時刻の差の最大値を求める。次に、目標の最大角速度vmaxと最大値Δtmaxの積から予測誤差共分散の拡大分を求める。
【0072】
(3−2)仮航跡の速度の最大値をvTmax、全体重心時刻と各観測値の観測時刻の差の最大値をΔtmaxとすると、予測誤差共分散の拡大分をvTmaxΔtmaxとする。すなわち、誤差共分散拡大部5は、仮航跡ファイル21から読み出した仮航跡に含まれる速度から、仮航跡の速度の最大値を求める。次に、仮航跡の速度の最大値vTmaxと最大値Δtmaxの積から予測誤差共分散の拡大分を求める。
【0073】
次に、「ゲート内外判定」ステップ304において、ゲート内外判定部23は、仮航跡と観測値が対応付けられる可能性を、仮航跡の予測誤差共分散と観測値の観測誤差共分散を使ったカイ平方検定によって判定する。
【0074】
次に、「航跡尤度評価」ステップ305において、航跡尤度評価部24は、仮航跡と前ステップでゲート内にあると判定された観測値の組み合わせに対して、その組み合わせにより観測値を仮航跡に割り当てた場合の仮航跡の尤度を計算する。
【0075】
次に、「相関決定」ステップ306において、相関決定部25は、観測値と仮航跡の組み合わせのどれを最終的に選択するか、前ステップで計算された尤度を基に決定する。
【0076】
次に、「平滑処理」ステップ307において、平滑処理部26は、前ステップで決定された相関結果を基に、仮航跡の予測諸元と組み合わされた観測値を使って平滑諸元を計算する。すなわち、仮航跡ファイル21に格納されている仮航跡の時刻を最新時刻の値に更新する。
【0077】
そして、「航跡決定」ステップ308において、航跡決定部27は、仮航跡の尤度や観測値との相関回数を基に、仮航跡を目標航跡と見做すかどうか、決定する。決定した目標航跡を目標航跡ファイル28に格納する。
【0078】
本実施の形態3に係る多目標追尾装置を図23に示す観測例に適用した場合、図12の様に誤差楕円が拡大され、図13のタイムチャートに示す様に仮航跡数の計5回の予測計算が必要となる。これは従来方式で必要な予測計算回数25回よりも少ない。
【0079】
すなわち、この実施の形態3に係る多目標追尾装置は、センサ10で観測領域をサーチすることによって得られた観測値を使って目標航跡を作る多目標追尾装置であって、1サーチで得られた全観測値の重心の位置に相当する観測時刻である全体重心時刻を計算する重心計算部4と、仮航跡と観測値の組み合わせについて、仮航跡を前記全体重心時刻によって予測計算する予測処理部22と、前記全体重心時刻で予測処理したことによる誤差分を考慮して、予測誤差共分散行列を拡大する誤差共分散拡大部5と、仮航跡と観測値が対応付け可能かを、前記予測処理部22が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部23と、観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部24と、前記航跡尤度評価部24が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部25と、仮航跡の予測諸元と前記相関決定部25により対応付けられた観測値を使って平滑諸元を計算する平滑処理部26と、仮航跡のうち尤度が高いものを目標航跡とする航跡決定部27とを設けたものである。
【0080】
以上の様に、この実施の形態3に係る多目標追尾装置によれば、観測値全体の全体重心時刻で各仮航跡に対する予測処理を行い、さらに時刻近似によって発生する共分散行列の誤差を補償するので、追尾性能を劣化させることなく処理負荷が軽減される。よって、目標数が多い場合でも対処可能となる。
【0081】
実施の形態4.
この発明の実施の形態4に係る多目標追尾装置について図14から図16までを参照しながら説明する。図14は、この発明の実施の形態4に係る多目標追尾装置の構成を示すブロック図である。
【0082】
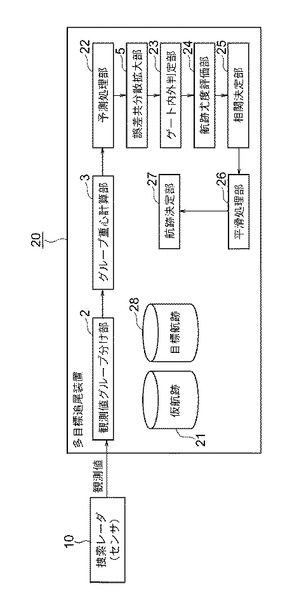
図14において、この実施の形態4に係る多目標追尾装置20は、観測値グループ分け部2と、グループ重心計算部3と、誤差共分散拡大部5と、時刻、予測諸元を含む仮航跡を複数個格納する仮航跡ファイル21と、予測処理部22と、ゲート内外判定部23と、航跡尤度評価部24と、相関決定部25と、平滑処理部26と、航跡決定部27と、目標航跡を格納する目標航跡ファイル28とが設けられている。
【0083】
つぎに、この実施の形態4に係る多目標追尾装置の動作について図面を参照しながら説明する。図15は、この発明の実施の形態4に係る多目標追尾装置の動作を示すフローチャートである。図16は、この発明の実施の形態4に係る多目標追尾装置におけるサーチ領域を示す図である。
【0084】
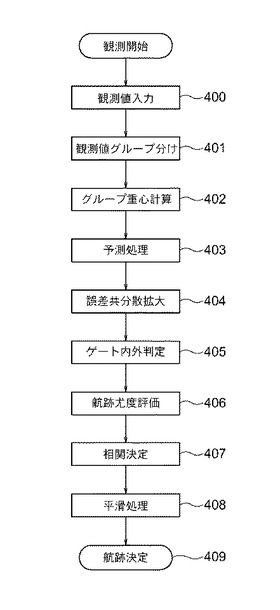
「観測値入力」ステップ400において、捜索レーダ(センサ)10から観測値が入力されると、まず、「観測値グループ分け」ステップ401において、観測値グループ分け部2は、距離の近い観測値同士でグループ化する。ある観測値と別の観測値の組み合わせについての同一グループ判定については、上記実施の形態2の同名のステップと同じ方式とする。
【0085】
次に、「グループ重心計算」ステップ402において、グループ重心計算部3は、グループに所属する観測値群の重心の位置に相当する観測時刻を計算する(以下、重心時刻と呼ぶ)。重心時刻の計算方法については、上記実施の形態2の同名のステップと同じ方式とする。
【0086】
次に、「予測処理」ステップ403において、予測処理部22は、仮航跡について観測値が所属するグループの重心時刻における予測位置と予測誤差共分散の計算を行う。
【0087】
次に、「誤差共分散拡大」ステップ404において、誤差共分散拡大部5は、重心時刻で予測処理したことによる誤差分を考慮して、予測誤差共分散行列を拡大する。この拡大分の計算については、上記実施の形態3の同名のステップと同じ方式とする。但し、全体重心時刻を重心時刻とする。
【0088】
次に、「ゲート内外判定」ステップ405において、ゲート内外判定部23は、仮航跡と観測値が対応付けられる可能性を、仮航跡の予測誤差共分散と観測値の観測誤差共分散を使ったカイ平方検定によって判定する。
【0089】
次に、「航跡尤度評価」ステップ406において、航跡尤度評価部24は、仮航跡と前ステップでゲート内にあると判定された観測値の組み合わせに対して、その組み合わせにより観測値を仮航跡に割り当てた場合の仮航跡の尤度を計算する。
【0090】
次に、「相関決定」ステップ407において、相関決定部25は、観測値と仮航跡の組み合わせのどれを最終的に選択するか、前ステップで計算された尤度を基に決定する。
【0091】
次に、「平滑処理」ステップ408において、平滑処理部26は、前ステップで決定された相関結果を基に、仮航跡の予測諸元と組み合わされた観測値を使って平滑諸元を計算する。すなわち、仮航跡ファイル21に格納されている仮航跡の時刻を最新時刻の値に更新する。
【0092】
そして、「航跡決定」ステップ409において、航跡決定部27は、仮航跡の尤度や観測値との相関回数を基に、仮航跡を目標航跡と見做すかどうか、決定する。決定した目標航跡を目標航跡ファイル28に格納する。
【0093】
本実施の形態4に係る多目標追尾装置を図23に示す観測例に適用した場合、図16の様に観測値のグループが2つできるとすると、上記の実施の形態2の図9と同様のタイムチャートとなり、仮航跡数×グループ数(5×2)の計10回の予測計算が必要となる。これは従来方式で必要な予測計算回数25回よりも少ない。
【0094】
すなわち、この実施の形態4に係る多目標追尾装置は、センサ10で観測領域をサーチすることによって得られた観測値を使って目標航跡を作る多目標追尾装置であって、1サーチで得られた観測値群をグループ分けする観測値グループ分け部2と、グループ毎にグループの重心位置に相当する観測時刻である重心時刻を計算するグループ重心計算部3と、仮航跡と観測値の組み合わせについて、仮航跡を観測値が所属するグループの前記重心時刻によって予測計算する予測処理部22と、前記重心時刻で予測処理したことによる誤差分を考慮して、予測誤差共分散行列を拡大する誤差共分散拡大部5と、仮航跡と観測値が対応付け可能かを、前記予測処理部22が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部23と、観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部24と、前記航跡尤度評価部24が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部25と、仮航跡の予測諸元と前記相関決定部25により対応付けられた観測値を使って平滑諸元を計算する平滑処理部26と、仮航跡のうち尤度が高いものを目標航跡とする航跡決定部27とを設けたものである。
【0095】
以上の様に、この実施の形態4に係る多目標追尾装置によれば、観測値をグループ化し、グループの重心時刻で各仮航跡に対する予測処理を行い、さらに時刻近似によって発生する共分散行列の誤差を補償するので、追尾性能を劣化させることなく処理負荷が軽減される。よって、目標数が多い場合でも対処可能となる。
【0096】
実施の形態5.
この発明の実施の形態5に係る多目標追尾装置について図17から図20までを参照しながら説明する。図17は、この発明の実施の形態5に係る多目標追尾装置の構成を示すブロック図である。
【0097】
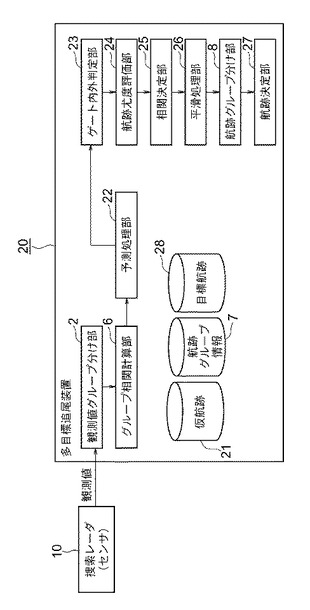
図17において、この実施の形態5に係る多目標追尾装置20は、観測値グループ分け部2と、グループ相関計算部6と、同一グループの仮航跡を記述する仮航跡グループ情報を格納する航跡グループ情報ファイル7と、航跡グループ分け部8と、時刻、予測諸元を含む仮航跡を複数個格納する仮航跡ファイル21と、予測処理部22と、ゲート内外判定部23と、航跡尤度評価部24と、相関決定部25と、平滑処理部26と、航跡決定部27と、目標航跡を格納する目標航跡ファイル28とが設けられている。
【0098】
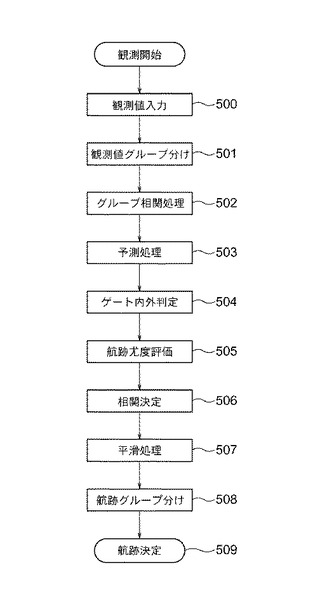
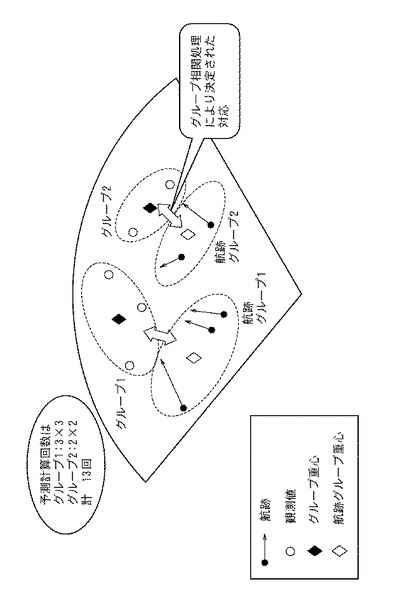
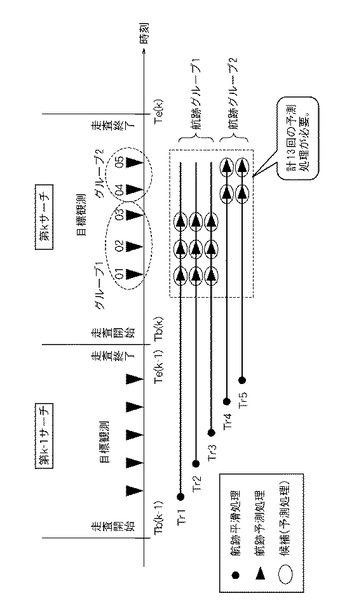
つぎに、この実施の形態5に係る多目標追尾装置の動作について図面を参照しながら説明する。図18は、この発明の実施の形態5に係る多目標追尾装置の動作を示すフローチャートである。図19は、この発明の実施の形態5に係る多目標追尾装置におけるサーチ領域を示す図である。図20は、この発明の実施の形態5に係る多目標追尾装置の観測時刻と仮航跡の予測時刻の関係を示すタイミングチャートである。
【0099】
「観測値入力」ステップ500において、捜索レーダ(センサ)10から観測値が入力されると、まず、「観測値グループ分け」ステップ501において、観測値グループ分け部2は、距離の近い観測値同士でグループ化する。ある観測値と別の観測値の組み合わせについての同一グループ判定については、上記実施の形態2の同名のステップと同じ方式とする。
【0100】
次に、「グループ相関処理」ステップ502において、グループ相関計算部6は、前ステップで求めた観測値のグループと、航跡グループ情報ファイル7から読み出した仮航跡のグループの相関処理を行う。これは観測値の位置と観測誤差共分散による分布を混合することによって計算された分布と、仮航跡の位置と誤差共分散行列による分布を混合することによって計算された分布を元に、「グループが同一である」という仮説を検定することによって相関の有無を決定する。
【0101】
次に、「予測処理」ステップ503において、予測処理部22は、前ステップで相関があると判定されたグループの仮航跡と観測値の組み合わせについて、観測時刻における仮航跡の予測位置と予測誤差共分散の計算を行う。
【0102】
次に、「ゲート内外判定」ステップ504において、ゲート内外判定部23は、仮航跡と観測値が対応付けられる可能性を、仮航跡の予測誤差共分散と観測値の観測誤差共分散を使ったカイ平方検定によって判定する。
【0103】
次に、「航跡尤度評価」ステップ505において、航跡尤度評価部24は、仮航跡と前ステップでゲート内にあると判定された観測値の組み合わせに対して、その組み合わせにより観測値を仮航跡に割り当てた場合の仮航跡の尤度を計算する。
【0104】
次に、「相関決定」ステップ506において、相関決定部25は、観測値と仮航跡の組み合わせのどれを最終的に選択するか、前ステップで計算された尤度を基に決定する。
【0105】
次に、「平滑処理」ステップ507において、平滑処理部26は、前ステップで決定された相関結果を基に、仮航跡の予測諸元と組み合わされた観測値を使って平滑諸元を計算する。すなわち、仮航跡ファイル21に格納されている仮航跡の時刻を最新時刻の値に更新する。
【0106】
次に、「航跡グループ分け」ステップ508において、航跡グループ分け部8は、平滑処理に利用した観測値が所属するグループによって、仮航跡をグループ分けする。その後、仮航跡グループ情報として、航跡グループ情報ファイル7に格納する。
【0107】
そして、「航跡決定」ステップ509において、仮航跡の尤度や観測値との相関回数を基に、仮航跡を目標航跡と見做すかどうか、決定する。決定した目標航跡を目標航跡ファイル28に格納する。
【0108】
本実施の形態5に係る多目標追尾装置を図23に示す観測例に適用した場合、図19の様に観測値のグループが2つ、仮航跡のグループが2つあり、観測値グループ1と航跡グループ1に相関があり、かつ観測値グループ2と航跡グループ2に相関があるとする。このとき図20のタイムチャートに示す様に、相関のあるグループ内で予測処理を行うためグループ1については仮航跡数×観測値数(3×3)の9回、グループ2については仮航跡数×観測値数(2×2)の4回の予測計算が必要となり、予測計算の回数は計13(=9+4)回となる。これは従来方式で必要な予測計算回数25回よりも少ない。
【0109】
すなわち、この実施の形態5に多目標追尾装置は、センサ10で観測領域をサーチすることによって得られた観測値を使って目標航跡を作る多目標追尾装置であって、1サーチで得られた観測値群をグループ分けする観測値グループ分け部2と、観測値のグループと仮航跡のグループ間で相関処理を行うグループ相関計算部6と、仮航跡と観測値の組み合わせについて、仮航跡を観測値の観測時刻によって予測計算する予測処理部22と、仮航跡と観測値が対応付け可能かを、前記予測処理部22が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部23と、観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部24と、前記航跡尤度評価部24が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部25と、仮航跡の予測諸元と前記相関決定部25により対応付けられた観測値を使って平滑諸元を計算する平滑処理部26と、平滑処理に利用した観測値が所属するグループによって、仮航跡のグループ分けをする航跡グループ分け部8と、仮航跡のうち尤度が高いものを目標航跡とする航跡決定部27とを設けたものである。
【0110】
以上の様に、この実施の形態5に係る多目標追尾装置によれば、観測値と仮航跡をグループ化し、グループ同士の相関を行ってから、相関のあるグループ内の仮航跡と観測値の組に対して予測処理を行うので、処理負荷が軽減される。よって、目標数が多い場合でも対処可能となる。
【図面の簡単な説明】
【0111】
【図1】この発明の実施の形態1に係る多目標追尾装置の構成を示すブロック図である。
【図2】この発明の実施の形態1に係る多目標追尾装置の動作を示すフローチャートである。
【図3】この発明の実施の形態1に係る多目標追尾装置におけるサーチ領域を示す図である。
【図4】この発明の実施の形態1に係る多目標追尾装置の観測時刻と仮航跡の予測時刻の関係を示すタイミングチャートである。
【図5】この発明の実施の形態2に係る多目標追尾装置の構成を示すブロック図である。
【図6】この発明の実施の形態2に係る多目標追尾装置の動作を示すフローチャートである。
【図7】この発明の実施の形態2に係る多目標追尾装置におけるサーチ領域を示す図である。
【図8】この発明の実施の形態2に係る多目標追尾装置の観測値グループ分け部の同一グループ判定を説明するための図である。
【図9】この発明の実施の形態2に係る多目標追尾装置の観測時刻と仮航跡の予測時刻の関係を示すタイミングチャートである。
【図10】この発明の実施の形態3に係る多目標追尾装置の構成を示すブロック図である。
【図11】この発明の実施の形態3に係る多目標追尾装置の動作を示すフローチャートである。
【図12】この発明の実施の形態3に係る多目標追尾装置におけるサーチ領域を示す図である。
【図13】この発明の実施の形態3に係る多目標追尾装置の観測時刻と仮航跡の予測時刻の関係を示すタイミングチャートである。
【図14】この発明の実施の形態4に係る多目標追尾装置の構成を示すブロック図である。
【図15】この発明の実施の形態4に係る多目標追尾装置の動作を示すフローチャートである。
【図16】この発明の実施の形態4に係る多目標追尾装置におけるサーチ領域を示す図である。
【図17】この発明の実施の形態5に係る多目標追尾装置の構成を示すブロック図である。
【図18】この発明の実施の形態5に係る多目標追尾装置の動作を示すフローチャートである。
【図19】この発明の実施の形態5に係る多目標追尾装置におけるサーチ領域を示す図である。
【図20】この発明の実施の形態5に係る多目標追尾装置の観測時刻と仮航跡の予測時刻の関係を示すタイミングチャートである。
【図21】従来の多目標追尾装置の構成を示すブロック図である。
【図22】従来の多目標追尾装置の動作を示すフローチャートである。
【図23】従来の多目標追尾装置におけるサーチ領域を示す図である。
【図24】従来の多目標追尾装置の観測時刻と仮航跡の予測時刻の関係を示すタイミングチャートである。
【符号の説明】
【0112】
1 観測値選別部、2 観測値グループ分け部、3 グループ重心計算部、4 重心計算部、5 誤差共分散拡大部、6 グループ相関計算部、7 航跡グループ情報ファイル、8 航跡グループ分け部、10 捜索レーダ(センサ)、20 多目標追尾装置、21 仮航跡ファイル、22 予測処理部、23 ゲート内外判定部、24 航跡尤度評価部、25 相関決定部、26 平滑処理部、27 航跡決定部、28 目標航跡ファイル。
【技術分野】
【0001】
捜索レーダ等のセンサシステムにおいて、一定領域内にある目標位置を観測するセンサから目標の観測値を使って仮航跡を生成する追尾開始技術が必要となる。この発明は、この追尾開始において、センサのサーチ内で観測時刻にずれが生じる場合に、現実的な処理時間で目標航跡を追尾開始する多目標追尾装置に関するものである。
【背景技術】
【0002】
センサにより一定領域内をサーチして得られた観測値を使って目標の追尾開始を行う技術については、すでに多くの論文、特許等の文献で取り挙げられており、その装置および方法については様々な提案がなされている。
【0003】
目標追尾では、仮航跡の予測位置と観測位置を比較することによって仮航跡と観測値の対応付けが可能か否か(相関の有無)を判定する。通常の仮航跡の予測位置の計算では、仮航跡の最新時刻における平滑諸元を観測値の時刻へ外挿する計算を行う。捜索レーダによる観測の場合、図23の例の様に1サーチ内でもビームが到達する時刻によって観測値が得られる時刻は異なる。この相違のため、仮航跡の予測処理における予測時刻は観測値の数だけ発生する。
【0004】
この様な観測値を使って追尾開始処理を行う場合の従来の多目標追尾装置について図21から図24までを参照しながら説明する。図21は、従来の多目標追尾装置の構成を示すブロック図である。図22は、従来の多目標追尾装置の動作を示すフローチャートである。図23は、従来の多目標追尾装置におけるサーチ領域を示す図である。図24は、従来の多目標追尾装置の観測時刻と仮航跡の予測時刻の関係を示すタイミングチャートである。
【0005】
図21において、従来の多目標追尾装置20は、時刻、予測諸元を含む仮航跡を複数個格納する仮航跡ファイル21と、予測処理部22と、ゲート内外判定部23と、航跡尤度評価部24と、相関決定部25と、平滑処理部26と、航跡決定部27と、目標航跡を格納する目標航跡ファイル28とが設けられている。
【0006】
「観測値入力」ステップ900において、捜索レーダ(センサ)10から観測値が入力されると、まず、「予測処理」ステップ901において、予測処理部22は、仮航跡について観測値の時刻における予測位置と予測誤差共分散の計算を行う。
【0007】
次に、「ゲート内外判定」ステップ902において、ゲート内外判定部23は、仮航跡と観測値が対応付けられる可能性を、仮航跡の予測誤差共分散と観測値の観測誤差共分散を使ったカイ平方検定によって判定する。
【0008】
次に、「航跡尤度評価」ステップ903において、航跡尤度評価部24は、仮航跡と前ステップでゲート内にあると判定された観測値の組み合わせに対して、その組み合わせにより観測値を仮航跡に割り当てた場合の仮航跡の尤度を計算する。
【0009】
次に、「相関決定」ステップ904において、相関決定部25は、観測値と仮航跡の組み合わせのどれを最終的に選択するか、前ステップで計算された尤度を基に決定する。
【0010】
次に、「平滑処理」ステップ905において、平滑処理部26は、前ステップで決定された相関結果を基に、仮航跡の予測諸元と組み合わされた観測値を使って平滑諸元を計算する。すなわち、仮航跡ファイル21に格納されている仮航跡の時刻を最新時刻の値に更新する。
【0011】
そして、「航跡決定」ステップ906において、航跡決定部27は、仮航跡の尤度や観測値との相関回数を基に、仮航跡を目標航跡と見做すかどうか、決定する。決定した目標航跡を目標航跡ファイル28に格納する。
【0012】
また、捜索レーダを想定した1サーチ内での観測値の時刻ずれに起因する演算負荷増大の問題を解消するための従来の他の目標追尾装置が提案されている(例えば、特許文献1参照)。この目標追尾装置では、観測領域を事前に分割し、分割領域毎に追尾処理を行うことによって演算負荷の削減を図っている。
【0013】
【特許文献1】特開2004−233136号公報
【発明の開示】
【発明が解決しようとする課題】
【0014】
上述したような従来の多目標追尾装置では、時刻ずれがある1サーチ分の観測値を処理しようとすると、1サーチの追尾開始処理において必要な予測処理回数は「仮航跡数×観測値数」となる。図23に示す観測例では、図24に示すタイミングチャートの様に計25回の予測処理が必要となる。予測処理に起因する演算負荷は、目標数が多い程高くなり、現実的な処理時間内での追尾開始が困難となる。
【0015】
また、時刻ずれ観測値の処理時間短縮を図った従来の他の目標追尾装置では、目標航跡が分割領域の境界を跨って運動する場合に正確な追尾を行うことができないという問題点があった。
【0016】
この発明は、上述のような課題を解決するためになされたもので、その目的は、許容可能な処理時間で、正確な追尾結果を得ることができる多目標追尾装置を得るものである。
【課題を解決するための手段】
【0017】
この発明に係る多目標追尾装置は、センサで観測領域をサーチすることによって得られた観測値を使って目標航跡を作る多目標追尾装置であって、予測計算を行う仮航跡と観測値の組み合わせを決定する観測値選別部と、前記観測値選別部により決定された仮航跡と観測値の組み合わせについて、仮航跡を観測値の時刻によって予測計算する予測処理部と、仮航跡と観測値が対応付け可能かを、前記予測処理部が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部と、観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部と、前記航跡尤度評価部が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部と、仮航跡の予測諸元と前記相関決定部により対応付けられた観測値を使って平滑諸元を計算する平滑処理部と、仮航跡のうち尤度が高いものを目標航跡とする航跡決定部とを設けたものである。
【発明の効果】
【0018】
この発明に係る多目標追尾装置は、許容可能な処理時間で、正確な追尾結果を得ることができるという効果を奏する。
【発明を実施するための最良の形態】
【0019】
実施の形態1.
この発明の実施の形態1に係る多目標追尾装置について図1から図4までを参照しながら説明する。図1は、この発明の実施の形態1に係る多目標追尾装置の構成を示すブロック図である。なお、以降では、各図中、同一符号は同一又は相当部分を示す。
【0020】
図1において、この実施の形態1に係る多目標追尾装置20は、観測値選別部1と、時刻、予測諸元を含む仮航跡を複数個格納する仮航跡ファイル21と、予測処理部22と、ゲート内外判定部23と、航跡尤度評価部24と、相関決定部25と、平滑処理部26と、航跡決定部27と、目標航跡を格納する目標航跡ファイル28とが設けられている。
【0021】
つぎに、この実施の形態1に係る多目標追尾装置の動作について図面を参照しながら説明する。図2は、この発明の実施の形態1に係る多目標追尾装置の動作を示すフローチャートである。図3は、この発明の実施の形態1に係る多目標追尾装置におけるサーチ領域を示す図である。図4は、この発明の実施の形態1に係る多目標追尾装置の観測時刻と仮航跡の予測時刻の関係を示すタイミングチャートである。
【0022】
「観測値入力」ステップ100において、捜索レーダ(センサ)10から観測値が入力されると、まず「観測値選別処理」ステップ101において、観測値選別部1は、仮航跡に対して、予測処理を行う観測値を選別する。この選別では、仮航跡と観測値の全ての組み合わせについて、その組み合わせを相関の候補とするか否かを判定する。ある仮航跡とある観測値の組み合わせについての判定は、以下の4方式の何れかとする。
【0023】
(1−1)観測値の観測時刻と仮航跡の前サーチにおける平滑時刻の差が、閾値(第1の閾値)を超えない場合にその観測値を候補とする。すなわち、以下の不等式(1)が成立するときに候補とする。
【0024】
【数1】
【0025】
ここで、ΔTは観測時刻と仮航跡の平滑時刻の差であり、Tsearchはサーチにかかる時間、thTは事前に設定する閾値(第1の閾値)である。すなわち、観測値選別部1は、入力される観測値に含まれる観測時刻と、仮航跡ファイル21から読み出した仮航跡に含まれる平滑時刻とからΔTを求める。また、求めたΔTと、捜索レーダ(センサ)10から入手したTsearchから、観測値の観測時刻と仮航跡の前サーチにおける平滑時刻の差を求める。次に、求めた観測値の観測時刻と仮航跡の前サーチにおける平滑時刻の差が、閾値thT未満の場合には、その観測値を選別する。
【0026】
(1−2)図3に示す様に、観測値の時刻と仮航跡の前サーチにおける平滑時刻の差が、サーチの角速度とサーチにかかる時間と目標の最大角速度から求めた許容時間差を越えない場合に、その観測値を候補とする。この場合の判定式(2)は以下のようになる。
【0027】
【数2】
【0028】
ここで、ΔTは観測時刻と仮航跡の平滑時刻の差であり、Tsearchはサーチにかかる時間、vAz_maxは事前に設定する目標の最大角速度、vsearchはサーチの角速度である。すなわち、観測値選別部1は、入力される観測値に含まれる観測時刻と、仮航跡ファイル21から読み出した仮航跡に含まれる平滑時刻とからΔTを求める。また、求めたΔTと、捜索レーダ(センサ)10から入手したTsearchから、観測値の観測時刻と仮航跡の前サーチにおける平滑時刻の差を求める。さらに、目標の最大角速度と、捜索レーダ(センサ)10から入手したTsearch、vsearchから、式(2)の右辺の値を求める。次に、求めた観測値の観測時刻と仮航跡の前サーチにおける平滑時刻の差が、式(2)の右辺の値未満の場合には、その観測値を選別する。
【0029】
(1−3)上記の(1−2)の判定に加え、さらに観測値と仮航跡の距離差も判定に加える。すなわち、式(2)の条件に加えて、以下の式(3)の条件も成立する場合に限って、その観測値を候補とする。
【0030】
【数3】
【0031】
ここで、RTは仮航跡の前サーチの平滑時刻からTsearch(1サーチにかかる時間)後の位置から計算したセンサからの距離、ROは観測値のセンサからの距離であり、thRは事前に設定する閾値(第2の閾値)である。すなわち、観測値選別部1は、仮航跡ファイル21から読み出した仮航跡に含まれる前サーチの平滑時刻と、捜索レーダ(センサ)10から入手したTsearchとからRTを求める。また、求めたRTと、入力される観測値に含まれるROをから、観測値と仮航跡の距離差を求める。次に、求めた観測値の観測時刻と仮航跡の前サーチにおける平滑時刻の差が、式(2)の右辺の値未満の場合で、かつ、観測値と仮航跡の距離差が、閾値thR未満の場合には、その観測値を選別する。
【0032】
(1−4)上記の判定式(2)において、vAz_maxを事前設定のパラメータでなく、前サーチで計算された仮航跡の速度の中の最大の値とする。すなわち、観測値選別部1は、仮航跡ファイル21から読み出した仮航跡に含まれる速度の中の最大値を求める。また、入力される観測値に含まれる観測時刻と、仮航跡ファイル21から読み出した仮航跡に含まれる平滑時刻とからΔTを求める。また、求めたΔTと、捜索レーダ(センサ)10から入手したTsearchから、観測値の観測時刻と仮航跡の前サーチにおける平滑時刻の差を求める。さらに、求めた仮航跡の速度の中の最大の値と、捜索レーダ(センサ)10から入手したTsearch、vsearchから、式(2)の右辺の値を求める。次に、求めた観測値の観測時刻と仮航跡の前サーチにおける平滑時刻の差が、式(2)の右辺の値未満の場合には、その観測値を選別する。
【0033】
次に、「予測処理」ステップ102において、予測処理部22は、仮航跡について観測値の観測時刻における予測位置と予測誤差共分散の計算を行う。ただし、ある仮航跡と、その仮航跡について前ステップで候補と判定されなかった観測値に対する予測計算は行わない。
【0034】
次に、「ゲート内外判定」ステップ103において、ゲート内外判定部23は、仮航跡と観測値が対応付けられる可能性を、仮航跡の予測誤差共分散と観測値の観測誤差共分散を使ったカイ平方検定によって判定する。
【0035】
次に、「航跡尤度評価」ステップ104において、航跡尤度評価部24は、仮航跡と前ステップでゲート内にあると判定された観測値の組み合わせに対して、その組み合わせにより観測値を仮航跡に割り当てた場合の仮航跡の尤度を計算する。
【0036】
次に、「相関決定」ステップ105において、相関決定部25は、観測値と仮航跡の組み合わせのどれを最終的に選択するか、前ステップで計算された尤度を基に決定する。
【0037】
次に、「平滑処理」ステップ106において、平滑処理部26は、前ステップで決定された相関結果を基に、仮航跡の予測諸元と組み合わされた観測値を使って平滑諸元を計算する。すなわち、仮航跡ファイル21に格納されている仮航跡の時刻を最新時刻の値に更新する。
【0038】
そして、「航跡決定」ステップ107において、航跡決定部27は、仮航跡の尤度や観測値との相関回数を基に、仮航跡を目標航跡と見做すかどうか、決定する。決定した目標航跡を目標航跡ファイル28に格納する。
【0039】
本実施の形態1に係る多目標追尾装置を図23に示す観測例に適用した場合(図上、左から1番目〜5番目の仮航跡、1番目〜5番目の観測値とする。)、1番目の仮航跡について1番目〜3番目の観測値が上記の判定式(2)を満たし、2番目の仮航跡について2番目〜4番目の観測値が上記の判定式(2)を満たし、3番目の仮航跡について3番目〜4番目の観測値が上記の判定式(2)を満たし、4番目の仮航跡について4番目〜5番目の観測値が上記の判定式(2)を満たし、5番目の仮航跡について3番目〜4番目の観測値が上記の判定式(2)を満たしていると、図4のタイムチャートに示す様に計12回の予測計算が必要となる。これは従来方式で必要な予測計算回数25回よりも少ない。
【0040】
すなわち、この実施の形態1に係る多目標追尾装置は、センサ10で観測領域をサーチすることによって得られた観測値を使って目標航跡を作る多目標追尾装置であって、予測計算を行う仮航跡と観測値の組み合わせを決定する観測値選別部1と、前記観測値選別部1により決定された仮航跡と観測値の組み合わせについて、仮航跡を観測値の時刻によって予測計算する予測処理部22と、仮航跡と観測値が対応付け可能かを、前記予測処理部22が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部23と、観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部24と、前記航跡尤度評価部24が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部25と、仮航跡の予測諸元と前記相関決定部25により対応付けられた観測値を使って平滑諸元を計算する平滑処理部26と、仮航跡のうち尤度が高いものを目標航跡とする航跡決定部27とを設けたものである。
【0041】
以上の様に、この実施の形態1に係る多目標追尾装置によれば、各仮航跡に対して予測処理を行う観測値を選別する前処理を行うので、処理負荷が軽減される。よって、目標数が多い場合でも対処可能となる。
【0042】
実施の形態2.
この発明の実施の形態2に係る多目標追尾装置について図5から図9までを参照しながら説明する。図5は、この発明の実施の形態2に係る多目標追尾装置の構成を示すブロック図である。
【0043】
図5において、この実施の形態2に係る多目標追尾装置20は、観測値グループ分け部2と、グループ重心計算部3と、時刻、予測諸元を含む仮航跡を複数個格納する仮航跡ファイル21と、予測処理部22と、ゲート内外判定部23と、航跡尤度評価部24と、相関決定部25と、平滑処理部26と、航跡決定部27と、目標航跡を格納する目標航跡ファイル28とが設けられている。
【0044】
つぎに、この実施の形態2に係る多目標追尾装置の動作について図面を参照しながら説明する。図6は、この発明の実施の形態2に係る多目標追尾装置の動作を示すフローチャートである。図7は、この発明の実施の形態2に係る多目標追尾装置におけるサーチ領域を示す図である。図8は、この発明の実施の形態2に係る多目標追尾装置の観測値グループ分け部の同一グループ判定を説明するための図である。図9は、この発明の実施の形態2に係る多目標追尾装置の観測時刻と仮航跡の予測時刻の関係を示すタイミングチャートである。
【0045】
「観測値入力」ステップ200において、捜索レーダ(センサ)10から観測値が入力されると、まず、「観測値グループ分け」ステップ201において、観測値グループ分け部2は、距離の近い観測値同士でグループ化する。ある観測値と別の観測値の組み合わせについての同一グループ判定は以下の3方式の何れかとする。
【0046】
(2−1)2つの観測値の観測時刻の差が、閾値(第3の閾値)を超えない場合にその観測値を候補とする。すなわち、以下の不等式(4)が成立するときに候補とする。
【0047】
【数4】
【0048】
ここで、ΔTは2つの観測値の観測時刻の差であり、thTは事前に設定する閾値(第3の閾値)である。すなわち、観測値グループ分け部2は、入力される観測値に含まれる観測時刻から、2つの観測値の観測時刻の差を求める。次に、求めた2つの観測値の観測時刻の差が、閾値thT未満の場合には、これらの2つの観測値を同一グループと判定する。
【0049】
(2−2)図8に示す様に、2つの観測値の観測時刻の差が、サーチの角速度とサーチにかかる時間と目標の最大角速度から求めた許容時間差を越えない場合に、その観測値を候補とする。この場合の判定式(5)は以下のようになる。
【0050】
【数5】
【0051】
ここで、ΔTは2つの観測値の時刻の差であり、Tsearchはサーチにかかる時間、vAz_maxは事前に設定する目標の最大角速度、vsearchはサーチの角速度である。すなわち、観測値グループ分け部2は、入力される観測値に含まれる観測時刻から、2つの観測値の観測時刻の差を求める。また、目標の最大角速度と、捜索レーダ(センサ)10から入手したTsearch、vsearchから、式(5)の右辺を求める。次に、求めた2つの観測値の観測時刻の差が、式(5)の右辺の値未満の場合には、これらの2つの観測値を同一グループと判定する。
【0052】
(2−3)上記の(2−2)の判定に加え、さらに、2つの観測値の距離差も判定に加える。すなわち、式(5)の条件に加えて、以下の式(6)の条件も成立する場合に限って、その観測値を候補とする。
【0053】
【数6】
【0054】
ここで、ΔRは2つの観測値の距離差、thRは事前に設定する閾値(第4の閾値)である。すなわち、観測値グループ分け部2は、入力される観測値に含まれる観測時刻から、2つの観測値の観測時刻の差を求める。また、目標の最大角速度と、捜索レーダ(センサ)10から入手したTsearch、vsearchから、式(5)の右辺を求める。さらに、入力される観測値に含まれる距離から、2つの観測値の距離差を求める。次に、求めた2つの観測値の観測時刻の差が、式(5)の右辺の値未満の場合で、かつ、求めた2つの観測値の距離差が、閾値thR未満の場合には、これらの2つの観測値を同一グループと判定する。
【0055】
次に、「グループ重心計算」ステップ202において、グループ重心計算部3は、グループに所属する観測値群の重心の位置に相当する観測時刻を計算する(以下、重心時刻と呼ぶ)。グループ重心計算部3は、入力される観測値に含まれる位置、観測時刻から、平均などにより、同じグループに所属する観測値群の重心の位置を求め、重心の位置に対応する観測時刻、つまり重心時刻を求める。
【0056】
次に、「予測処理」ステップ203において、予測処理部22は、仮航跡について観測値が所属するグループの重心時刻における予測位置と予測誤差共分散の計算を行う。
【0057】
次に、「ゲート内外判定」ステップ204において、ゲート内外判定部23は、仮航跡と観測値が対応付けられる可能性を、仮航跡の予測誤差共分散と観測値の観測誤差共分散を使ったカイ平方検定によって判定する。
【0058】
次に、「航跡尤度評価」ステップ205において、航跡尤度評価部24は、仮航跡と前ステップでゲート内にあると判定された観測値の組み合わせに対して、その組み合わせにより観測値を仮航跡に割り当てた場合の仮航跡の尤度を計算する。
【0059】
次に、「相関決定」ステップ206において、相関決定部25は、観測値と仮航跡の組み合わせのどれを最終的に選択するか、前ステップで計算された尤度を基に決定する。
【0060】
次に、「平滑処理」ステップ207において、平滑処理部26は、前ステップで決定された相関結果を基に、仮航跡の予測諸元と組み合わされた観測値を使って平滑諸元を計算する。すなわち、仮航跡ファイル21に格納されている仮航跡の時刻を最新時刻の値に更新する。
【0061】
そして、「航跡決定」ステップ208において、航跡決定部27は、仮航跡の尤度や観測値との相関回数を基に、仮航跡を目標航跡と見做すかどうか、決定する。決定した目標航跡を目標航跡ファイル28に格納する。
【0062】
本実施の形態2に係る多目標追尾装置を図23に示す観測例に適用した場合、図7の様にグループが2つできるとすると、図9のタイムチャートに示す様に、仮航跡数×グループ数(5×2)の計10回の予測計算が必要となる。これは従来方式で必要な予測計算回数25回よりも少ない。
【0063】
すなわち、この実施の形態2に係る多目標追尾装置は、センサ10で観測領域をサーチすることによって得られた観測値を使って目標航跡を作る多目標追尾装置であって、1サーチで得られた観測値群をグループ分けする観測値グループ分け部2と、グループ毎にグループの重心位置に相当する観測時刻である重心時刻を計算するグループ重心計算部3と、仮航跡と観測値の組み合わせについて、仮航跡を観測値が所属するグループの前記重心時刻によって予測計算する予測処理部22と、仮航跡と観測値が対応付け可能かを、前記予測処理部22が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部23と、観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部24と、前記航跡尤度評価部24が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部25と、仮航跡の予測諸元と前記相関決定部25により対応付けられた観測値を使って平滑諸元を計算する平滑処理部26と、仮航跡のうち尤度が高いものを目標航跡とする航跡決定部27とを設けたものである。
【0064】
以上の様に、この実施の形態2に係る多目標追尾装置によれば、観測値をグループ化してその重心時刻で各仮航跡に対する予測処理を行うので、処理負荷が軽減される。よって、目標数が多い場合でも対処可能となる。
【0065】
実施の形態3.
この発明の実施の形態3に係る多目標追尾装置について図10から図13までを参照しながら説明する。図10は、この発明の実施の形態3に係る多目標追尾装置の構成を示すブロック図である。
【0066】
図10において、この実施の形態3に係る多目標追尾装置20は、重心計算部4と、誤差共分散拡大部5と、時刻、予測諸元を含む仮航跡を複数個格納する仮航跡ファイル21と、予測処理部22と、ゲート内外判定部23と、航跡尤度評価部24と、相関決定部25と、平滑処理部26と、航跡決定部27と、目標航跡を格納する目標航跡ファイル28とが設けられている。
【0067】
つぎに、この実施の形態3に係る多目標追尾装置の動作について図面を参照しながら説明する。図11は、この発明の実施の形態3に係る多目標追尾装置の動作を示すフローチャートである。図12は、この発明の実施の形態3に係る多目標追尾装置におけるサーチ領域を示す図である。図13は、この発明の実施の形態3に係る多目標追尾装置の観測時刻と仮航跡の予測時刻の関係を示すタイミングチャートである。
【0068】
「観測値入力」ステップ300において、捜索レーダ(センサ)10から観測値が入力されると、まず、「重心計算」ステップ301において、重心計算部4は、得られた全観測値の重心の位置に相当する観測時刻を計算する(以下、全体重心時刻と呼ぶ)。重心計算部4は、入力される観測値に含まれる位置、観測時刻から、平均などにより、全観測値の重心の位置を求め、重心の位置に対応する観測時刻、つまり全体重心時刻を求める。
【0069】
次に、「予測処理」ステップ302において、予測処理部22は、仮航跡について全体重心時刻における予測位置と予測誤差共分散の計算を行う。
【0070】
次に、「誤差共分散拡大」ステップ303において、誤差共分散拡大部5は、全体重心時刻で予測処理したことによる誤差分を考慮して、予測誤差共分散行列を拡大する。この拡大分の計算は以下のいずれかとする。
【0071】
(3−1)事前に設定されたパラメータである目標の最大角速度をvmax、全体重心時刻と各観測値の観測時刻の差の最大値をΔtmaxとすると、予測誤差共分散の拡大分をvmaxΔtmaxとする。すなわち、誤差共分散拡大部5は、入力される観測値に含まれる観測時刻から、ステップ301で求めた全体重心時刻と各観測値の観測時刻の差の最大値を求める。次に、目標の最大角速度vmaxと最大値Δtmaxの積から予測誤差共分散の拡大分を求める。
【0072】
(3−2)仮航跡の速度の最大値をvTmax、全体重心時刻と各観測値の観測時刻の差の最大値をΔtmaxとすると、予測誤差共分散の拡大分をvTmaxΔtmaxとする。すなわち、誤差共分散拡大部5は、仮航跡ファイル21から読み出した仮航跡に含まれる速度から、仮航跡の速度の最大値を求める。次に、仮航跡の速度の最大値vTmaxと最大値Δtmaxの積から予測誤差共分散の拡大分を求める。
【0073】
次に、「ゲート内外判定」ステップ304において、ゲート内外判定部23は、仮航跡と観測値が対応付けられる可能性を、仮航跡の予測誤差共分散と観測値の観測誤差共分散を使ったカイ平方検定によって判定する。
【0074】
次に、「航跡尤度評価」ステップ305において、航跡尤度評価部24は、仮航跡と前ステップでゲート内にあると判定された観測値の組み合わせに対して、その組み合わせにより観測値を仮航跡に割り当てた場合の仮航跡の尤度を計算する。
【0075】
次に、「相関決定」ステップ306において、相関決定部25は、観測値と仮航跡の組み合わせのどれを最終的に選択するか、前ステップで計算された尤度を基に決定する。
【0076】
次に、「平滑処理」ステップ307において、平滑処理部26は、前ステップで決定された相関結果を基に、仮航跡の予測諸元と組み合わされた観測値を使って平滑諸元を計算する。すなわち、仮航跡ファイル21に格納されている仮航跡の時刻を最新時刻の値に更新する。
【0077】
そして、「航跡決定」ステップ308において、航跡決定部27は、仮航跡の尤度や観測値との相関回数を基に、仮航跡を目標航跡と見做すかどうか、決定する。決定した目標航跡を目標航跡ファイル28に格納する。
【0078】
本実施の形態3に係る多目標追尾装置を図23に示す観測例に適用した場合、図12の様に誤差楕円が拡大され、図13のタイムチャートに示す様に仮航跡数の計5回の予測計算が必要となる。これは従来方式で必要な予測計算回数25回よりも少ない。
【0079】
すなわち、この実施の形態3に係る多目標追尾装置は、センサ10で観測領域をサーチすることによって得られた観測値を使って目標航跡を作る多目標追尾装置であって、1サーチで得られた全観測値の重心の位置に相当する観測時刻である全体重心時刻を計算する重心計算部4と、仮航跡と観測値の組み合わせについて、仮航跡を前記全体重心時刻によって予測計算する予測処理部22と、前記全体重心時刻で予測処理したことによる誤差分を考慮して、予測誤差共分散行列を拡大する誤差共分散拡大部5と、仮航跡と観測値が対応付け可能かを、前記予測処理部22が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部23と、観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部24と、前記航跡尤度評価部24が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部25と、仮航跡の予測諸元と前記相関決定部25により対応付けられた観測値を使って平滑諸元を計算する平滑処理部26と、仮航跡のうち尤度が高いものを目標航跡とする航跡決定部27とを設けたものである。
【0080】
以上の様に、この実施の形態3に係る多目標追尾装置によれば、観測値全体の全体重心時刻で各仮航跡に対する予測処理を行い、さらに時刻近似によって発生する共分散行列の誤差を補償するので、追尾性能を劣化させることなく処理負荷が軽減される。よって、目標数が多い場合でも対処可能となる。
【0081】
実施の形態4.
この発明の実施の形態4に係る多目標追尾装置について図14から図16までを参照しながら説明する。図14は、この発明の実施の形態4に係る多目標追尾装置の構成を示すブロック図である。
【0082】
図14において、この実施の形態4に係る多目標追尾装置20は、観測値グループ分け部2と、グループ重心計算部3と、誤差共分散拡大部5と、時刻、予測諸元を含む仮航跡を複数個格納する仮航跡ファイル21と、予測処理部22と、ゲート内外判定部23と、航跡尤度評価部24と、相関決定部25と、平滑処理部26と、航跡決定部27と、目標航跡を格納する目標航跡ファイル28とが設けられている。
【0083】
つぎに、この実施の形態4に係る多目標追尾装置の動作について図面を参照しながら説明する。図15は、この発明の実施の形態4に係る多目標追尾装置の動作を示すフローチャートである。図16は、この発明の実施の形態4に係る多目標追尾装置におけるサーチ領域を示す図である。
【0084】
「観測値入力」ステップ400において、捜索レーダ(センサ)10から観測値が入力されると、まず、「観測値グループ分け」ステップ401において、観測値グループ分け部2は、距離の近い観測値同士でグループ化する。ある観測値と別の観測値の組み合わせについての同一グループ判定については、上記実施の形態2の同名のステップと同じ方式とする。
【0085】
次に、「グループ重心計算」ステップ402において、グループ重心計算部3は、グループに所属する観測値群の重心の位置に相当する観測時刻を計算する(以下、重心時刻と呼ぶ)。重心時刻の計算方法については、上記実施の形態2の同名のステップと同じ方式とする。
【0086】
次に、「予測処理」ステップ403において、予測処理部22は、仮航跡について観測値が所属するグループの重心時刻における予測位置と予測誤差共分散の計算を行う。
【0087】
次に、「誤差共分散拡大」ステップ404において、誤差共分散拡大部5は、重心時刻で予測処理したことによる誤差分を考慮して、予測誤差共分散行列を拡大する。この拡大分の計算については、上記実施の形態3の同名のステップと同じ方式とする。但し、全体重心時刻を重心時刻とする。
【0088】
次に、「ゲート内外判定」ステップ405において、ゲート内外判定部23は、仮航跡と観測値が対応付けられる可能性を、仮航跡の予測誤差共分散と観測値の観測誤差共分散を使ったカイ平方検定によって判定する。
【0089】
次に、「航跡尤度評価」ステップ406において、航跡尤度評価部24は、仮航跡と前ステップでゲート内にあると判定された観測値の組み合わせに対して、その組み合わせにより観測値を仮航跡に割り当てた場合の仮航跡の尤度を計算する。
【0090】
次に、「相関決定」ステップ407において、相関決定部25は、観測値と仮航跡の組み合わせのどれを最終的に選択するか、前ステップで計算された尤度を基に決定する。
【0091】
次に、「平滑処理」ステップ408において、平滑処理部26は、前ステップで決定された相関結果を基に、仮航跡の予測諸元と組み合わされた観測値を使って平滑諸元を計算する。すなわち、仮航跡ファイル21に格納されている仮航跡の時刻を最新時刻の値に更新する。
【0092】
そして、「航跡決定」ステップ409において、航跡決定部27は、仮航跡の尤度や観測値との相関回数を基に、仮航跡を目標航跡と見做すかどうか、決定する。決定した目標航跡を目標航跡ファイル28に格納する。
【0093】
本実施の形態4に係る多目標追尾装置を図23に示す観測例に適用した場合、図16の様に観測値のグループが2つできるとすると、上記の実施の形態2の図9と同様のタイムチャートとなり、仮航跡数×グループ数(5×2)の計10回の予測計算が必要となる。これは従来方式で必要な予測計算回数25回よりも少ない。
【0094】
すなわち、この実施の形態4に係る多目標追尾装置は、センサ10で観測領域をサーチすることによって得られた観測値を使って目標航跡を作る多目標追尾装置であって、1サーチで得られた観測値群をグループ分けする観測値グループ分け部2と、グループ毎にグループの重心位置に相当する観測時刻である重心時刻を計算するグループ重心計算部3と、仮航跡と観測値の組み合わせについて、仮航跡を観測値が所属するグループの前記重心時刻によって予測計算する予測処理部22と、前記重心時刻で予測処理したことによる誤差分を考慮して、予測誤差共分散行列を拡大する誤差共分散拡大部5と、仮航跡と観測値が対応付け可能かを、前記予測処理部22が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部23と、観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部24と、前記航跡尤度評価部24が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部25と、仮航跡の予測諸元と前記相関決定部25により対応付けられた観測値を使って平滑諸元を計算する平滑処理部26と、仮航跡のうち尤度が高いものを目標航跡とする航跡決定部27とを設けたものである。
【0095】
以上の様に、この実施の形態4に係る多目標追尾装置によれば、観測値をグループ化し、グループの重心時刻で各仮航跡に対する予測処理を行い、さらに時刻近似によって発生する共分散行列の誤差を補償するので、追尾性能を劣化させることなく処理負荷が軽減される。よって、目標数が多い場合でも対処可能となる。
【0096】
実施の形態5.
この発明の実施の形態5に係る多目標追尾装置について図17から図20までを参照しながら説明する。図17は、この発明の実施の形態5に係る多目標追尾装置の構成を示すブロック図である。
【0097】
図17において、この実施の形態5に係る多目標追尾装置20は、観測値グループ分け部2と、グループ相関計算部6と、同一グループの仮航跡を記述する仮航跡グループ情報を格納する航跡グループ情報ファイル7と、航跡グループ分け部8と、時刻、予測諸元を含む仮航跡を複数個格納する仮航跡ファイル21と、予測処理部22と、ゲート内外判定部23と、航跡尤度評価部24と、相関決定部25と、平滑処理部26と、航跡決定部27と、目標航跡を格納する目標航跡ファイル28とが設けられている。
【0098】
つぎに、この実施の形態5に係る多目標追尾装置の動作について図面を参照しながら説明する。図18は、この発明の実施の形態5に係る多目標追尾装置の動作を示すフローチャートである。図19は、この発明の実施の形態5に係る多目標追尾装置におけるサーチ領域を示す図である。図20は、この発明の実施の形態5に係る多目標追尾装置の観測時刻と仮航跡の予測時刻の関係を示すタイミングチャートである。
【0099】
「観測値入力」ステップ500において、捜索レーダ(センサ)10から観測値が入力されると、まず、「観測値グループ分け」ステップ501において、観測値グループ分け部2は、距離の近い観測値同士でグループ化する。ある観測値と別の観測値の組み合わせについての同一グループ判定については、上記実施の形態2の同名のステップと同じ方式とする。
【0100】
次に、「グループ相関処理」ステップ502において、グループ相関計算部6は、前ステップで求めた観測値のグループと、航跡グループ情報ファイル7から読み出した仮航跡のグループの相関処理を行う。これは観測値の位置と観測誤差共分散による分布を混合することによって計算された分布と、仮航跡の位置と誤差共分散行列による分布を混合することによって計算された分布を元に、「グループが同一である」という仮説を検定することによって相関の有無を決定する。
【0101】
次に、「予測処理」ステップ503において、予測処理部22は、前ステップで相関があると判定されたグループの仮航跡と観測値の組み合わせについて、観測時刻における仮航跡の予測位置と予測誤差共分散の計算を行う。
【0102】
次に、「ゲート内外判定」ステップ504において、ゲート内外判定部23は、仮航跡と観測値が対応付けられる可能性を、仮航跡の予測誤差共分散と観測値の観測誤差共分散を使ったカイ平方検定によって判定する。
【0103】
次に、「航跡尤度評価」ステップ505において、航跡尤度評価部24は、仮航跡と前ステップでゲート内にあると判定された観測値の組み合わせに対して、その組み合わせにより観測値を仮航跡に割り当てた場合の仮航跡の尤度を計算する。
【0104】
次に、「相関決定」ステップ506において、相関決定部25は、観測値と仮航跡の組み合わせのどれを最終的に選択するか、前ステップで計算された尤度を基に決定する。
【0105】
次に、「平滑処理」ステップ507において、平滑処理部26は、前ステップで決定された相関結果を基に、仮航跡の予測諸元と組み合わされた観測値を使って平滑諸元を計算する。すなわち、仮航跡ファイル21に格納されている仮航跡の時刻を最新時刻の値に更新する。
【0106】
次に、「航跡グループ分け」ステップ508において、航跡グループ分け部8は、平滑処理に利用した観測値が所属するグループによって、仮航跡をグループ分けする。その後、仮航跡グループ情報として、航跡グループ情報ファイル7に格納する。
【0107】
そして、「航跡決定」ステップ509において、仮航跡の尤度や観測値との相関回数を基に、仮航跡を目標航跡と見做すかどうか、決定する。決定した目標航跡を目標航跡ファイル28に格納する。
【0108】
本実施の形態5に係る多目標追尾装置を図23に示す観測例に適用した場合、図19の様に観測値のグループが2つ、仮航跡のグループが2つあり、観測値グループ1と航跡グループ1に相関があり、かつ観測値グループ2と航跡グループ2に相関があるとする。このとき図20のタイムチャートに示す様に、相関のあるグループ内で予測処理を行うためグループ1については仮航跡数×観測値数(3×3)の9回、グループ2については仮航跡数×観測値数(2×2)の4回の予測計算が必要となり、予測計算の回数は計13(=9+4)回となる。これは従来方式で必要な予測計算回数25回よりも少ない。
【0109】
すなわち、この実施の形態5に多目標追尾装置は、センサ10で観測領域をサーチすることによって得られた観測値を使って目標航跡を作る多目標追尾装置であって、1サーチで得られた観測値群をグループ分けする観測値グループ分け部2と、観測値のグループと仮航跡のグループ間で相関処理を行うグループ相関計算部6と、仮航跡と観測値の組み合わせについて、仮航跡を観測値の観測時刻によって予測計算する予測処理部22と、仮航跡と観測値が対応付け可能かを、前記予測処理部22が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部23と、観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部24と、前記航跡尤度評価部24が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部25と、仮航跡の予測諸元と前記相関決定部25により対応付けられた観測値を使って平滑諸元を計算する平滑処理部26と、平滑処理に利用した観測値が所属するグループによって、仮航跡のグループ分けをする航跡グループ分け部8と、仮航跡のうち尤度が高いものを目標航跡とする航跡決定部27とを設けたものである。
【0110】
以上の様に、この実施の形態5に係る多目標追尾装置によれば、観測値と仮航跡をグループ化し、グループ同士の相関を行ってから、相関のあるグループ内の仮航跡と観測値の組に対して予測処理を行うので、処理負荷が軽減される。よって、目標数が多い場合でも対処可能となる。
【図面の簡単な説明】
【0111】
【図1】この発明の実施の形態1に係る多目標追尾装置の構成を示すブロック図である。
【図2】この発明の実施の形態1に係る多目標追尾装置の動作を示すフローチャートである。
【図3】この発明の実施の形態1に係る多目標追尾装置におけるサーチ領域を示す図である。
【図4】この発明の実施の形態1に係る多目標追尾装置の観測時刻と仮航跡の予測時刻の関係を示すタイミングチャートである。
【図5】この発明の実施の形態2に係る多目標追尾装置の構成を示すブロック図である。
【図6】この発明の実施の形態2に係る多目標追尾装置の動作を示すフローチャートである。
【図7】この発明の実施の形態2に係る多目標追尾装置におけるサーチ領域を示す図である。
【図8】この発明の実施の形態2に係る多目標追尾装置の観測値グループ分け部の同一グループ判定を説明するための図である。
【図9】この発明の実施の形態2に係る多目標追尾装置の観測時刻と仮航跡の予測時刻の関係を示すタイミングチャートである。
【図10】この発明の実施の形態3に係る多目標追尾装置の構成を示すブロック図である。
【図11】この発明の実施の形態3に係る多目標追尾装置の動作を示すフローチャートである。
【図12】この発明の実施の形態3に係る多目標追尾装置におけるサーチ領域を示す図である。
【図13】この発明の実施の形態3に係る多目標追尾装置の観測時刻と仮航跡の予測時刻の関係を示すタイミングチャートである。
【図14】この発明の実施の形態4に係る多目標追尾装置の構成を示すブロック図である。
【図15】この発明の実施の形態4に係る多目標追尾装置の動作を示すフローチャートである。
【図16】この発明の実施の形態4に係る多目標追尾装置におけるサーチ領域を示す図である。
【図17】この発明の実施の形態5に係る多目標追尾装置の構成を示すブロック図である。
【図18】この発明の実施の形態5に係る多目標追尾装置の動作を示すフローチャートである。
【図19】この発明の実施の形態5に係る多目標追尾装置におけるサーチ領域を示す図である。
【図20】この発明の実施の形態5に係る多目標追尾装置の観測時刻と仮航跡の予測時刻の関係を示すタイミングチャートである。
【図21】従来の多目標追尾装置の構成を示すブロック図である。
【図22】従来の多目標追尾装置の動作を示すフローチャートである。
【図23】従来の多目標追尾装置におけるサーチ領域を示す図である。
【図24】従来の多目標追尾装置の観測時刻と仮航跡の予測時刻の関係を示すタイミングチャートである。
【符号の説明】
【0112】
1 観測値選別部、2 観測値グループ分け部、3 グループ重心計算部、4 重心計算部、5 誤差共分散拡大部、6 グループ相関計算部、7 航跡グループ情報ファイル、8 航跡グループ分け部、10 捜索レーダ(センサ)、20 多目標追尾装置、21 仮航跡ファイル、22 予測処理部、23 ゲート内外判定部、24 航跡尤度評価部、25 相関決定部、26 平滑処理部、27 航跡決定部、28 目標航跡ファイル。
【特許請求の範囲】
【請求項1】
センサで観測領域をサーチすることによって得られた観測値を使って目標航跡を作る多目標追尾装置であって、
予測計算を行う仮航跡と観測値の組み合わせを決定する観測値選別部と、
前記観測値選別部により決定された仮航跡と観測値の組み合わせについて、仮航跡を観測値の時刻によって予測計算する予測処理部と、
仮航跡と観測値が対応付け可能かを、前記予測処理部が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部と、
観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部と、
前記航跡尤度評価部が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部と、
仮航跡の予測諸元と前記相関決定部により対応付けられた観測値を使って平滑諸元を計算する平滑処理部と、
仮航跡のうち尤度が高いものを目標航跡とする航跡決定部と
を備えたことを特徴とする多目標追尾装置。
【請求項2】
前記観測値選別部は、観測値の時刻と仮航跡の前サーチにおける平滑時刻の差が、事前に設定された第1の閾値を超えない場合に前記観測値を候補とする
ことを特徴とする請求項1記載の多目標追尾装置。
【請求項3】
前記観測値選別部は、観測値の時刻と仮航跡の前サーチにおける平滑時刻の差が、サーチの角速度とサーチにかかる時間と目標の最大角速度から求めた許容時間差を越えない場合に前記観測値を候補とする
ことを特徴とする請求項1記載の多目標追尾装置。
【請求項4】
前記観測値選別部は、観測値の時刻と仮航跡の前サーチにおける平滑時刻の差が、サーチの角速度とサーチにかかる時間と目標の最大角速度から求めた許容時間差を越えない場合で、かつ、観測値と仮航跡の距離差が、事前に設定された第2の閾値を超えない場合に前記観測値を候補とする
ことを特徴とする請求項1記載の多目標追尾装置。
【請求項5】
前記目標の最大角速度は、前サーチで計算された仮航跡の角速度の中の最大値である
ことを特徴とする請求項3又は4記載の多目標追尾装置。
【請求項6】
センサで観測領域をサーチすることによって得られた観測値を使って目標航跡を作る多目標追尾装置であって、
1サーチで得られた観測値群をグループ分けする観測値グループ分け部と、
グループ毎にグループの重心位置に相当する観測時刻である重心時刻を計算するグループ重心計算部と、
仮航跡と観測値の組み合わせについて、仮航跡を観測値が所属するグループの前記重心時刻によって予測計算する予測処理部と、
仮航跡と観測値が対応付け可能かを、前記予測処理部が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部と、
観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部と、
前記航跡尤度評価部が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部と、
仮航跡の予測諸元と前記相関決定部により対応付けられた観測値を使って平滑諸元を計算する平滑処理部と、
仮航跡のうち尤度が高いものを目標航跡とする航跡決定部と
を備えたことを特徴とする多目標追尾装置。
【請求項7】
センサで観測領域をサーチすることによって得られた観測値を使って目標航跡を作る多目標追尾装置であって、
1サーチで得られた全観測値の重心の位置に相当する観測時刻である全体重心時刻を計算する重心計算部と、
仮航跡と観測値の組み合わせについて、仮航跡を前記全体重心時刻によって予測計算する予測処理部と、
前記全体重心時刻で予測処理したことによる誤差分を考慮して、予測誤差共分散行列を拡大する誤差共分散拡大部と、
仮航跡と観測値が対応付け可能かを、前記予測処理部が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部と、
観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部と、
前記航跡尤度評価部が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部と、
仮航跡の予測諸元と前記相関決定部により対応付けられた観測値を使って平滑諸元を計算する平滑処理部と、
仮航跡のうち尤度が高いものを目標航跡とする航跡決定部と
を備えたことを特徴とする多目標追尾装置。
【請求項8】
センサで観測領域をサーチすることによって得られた観測値を使って目標航跡を作る多目標追尾装置であって、
1サーチで得られた観測値群をグループ分けする観測値グループ分け部と、
グループ毎にグループの重心位置に相当する観測時刻である重心時刻を計算するグループ重心計算部と、
仮航跡と観測値の組み合わせについて、仮航跡を観測値が所属するグループの前記重心時刻によって予測計算する予測処理部と、
前記重心時刻で予測処理したことによる誤差分を考慮して、予測誤差共分散行列を拡大する誤差共分散拡大部と、
仮航跡と観測値が対応付け可能かを、前記予測処理部が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部と、
観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部と、
前記航跡尤度評価部が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部と、
仮航跡の予測諸元と前記相関決定部により対応付けられた観測値を使って平滑諸元を計算する平滑処理部と、
仮航跡のうち尤度が高いものを目標航跡とする航跡決定部と
を備えたことを特徴とする多目標追尾装置。
【請求項9】
センサで観測領域をサーチすることによって得られた観測値を使って目標航跡を作る多目標追尾装置であって、
1サーチで得られた観測値群をグループ分けする観測値グループ分け部と、
観測値のグループと仮航跡のグループ間で相関処理を行うグループ相関計算部と、
仮航跡と観測値の組み合わせについて、仮航跡を観測値の観測時刻によって予測計算する予測処理部と、
仮航跡と観測値が対応付け可能かを、前記予測処理部が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部と、
観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部と、
前記航跡尤度評価部が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部と、
仮航跡の予測諸元と前記相関決定部により対応付けられた観測値を使って平滑諸元を計算する平滑処理部と、
平滑処理に利用した観測値が所属するグループによって、仮航跡のグループ分けをする航跡グループ分け部と、
仮航跡のうち尤度が高いものを目標航跡とする航跡決定部と
を備えたことを特徴とする多目標追尾装置。
【請求項10】
前記観測値グループ分け部は、2つの観測値の観測時刻の差が、事前に設定された第3の閾値を超えない場合に前記2つの観測値を同一グループとする
ことを特徴とする請求項6、8又は9記載の多目標追尾装置。
【請求項11】
前記観測値グループ分け部は、2つの観測値の観測時刻の差が、サーチの角速度とサーチにかかる時間と目標の最大角速度から求めた許容時間差を越えない場合に前記2つの観測値を同一グループとする
ことを特徴とする請求項6、8又は9記載の多目標追尾装置。
【請求項12】
前記観測値グループ分け部は、2つの観測値の観測時刻の差が、サーチの角速度とサーチにかかる時間と目標の最大角速度から求めた許容時間差を越えない場合で、かつ、前記2つの観測値の距離差が、事前に設定された第4の閾値を超えない場合に前記2つの観測値を同一グループとする
ことを特徴とする請求項6、8又は9記載の多目標追尾装置。
【請求項13】
前記誤差共分散拡大部は、事前に設定された目標の最大角速度と、前記全体重心時刻及び各観測値の時刻の差の最大値との積を予測誤差共分散行列の拡大分とする
ことを特徴とする請求項7記載の多目標追尾装置。
【請求項14】
前記誤差共分散拡大部は、仮航跡の速度の最大値と、前記全体重心時刻及び各観測値の時刻の差の最大値との積を予測誤差共分散行列の拡大分とする
ことを特徴とする請求項7記載の多目標追尾装置。
【請求項15】
前記誤差共分散拡大部は、事前に設定された目標の最大角速度と、前記重心時刻及び各観測値の時刻の差の最大値との積を予測誤差共分散行列の拡大分とする
ことを特徴とする請求項8記載の多目標追尾装置。
【請求項16】
前記誤差共分散拡大部は、仮航跡の速度の最大値と、前記重心時刻及び各観測値の時刻の差の最大値との積を予測誤差共分散行列の拡大分とする
ことを特徴とする請求項8記載の多目標追尾装置。
【請求項1】
センサで観測領域をサーチすることによって得られた観測値を使って目標航跡を作る多目標追尾装置であって、
予測計算を行う仮航跡と観測値の組み合わせを決定する観測値選別部と、
前記観測値選別部により決定された仮航跡と観測値の組み合わせについて、仮航跡を観測値の時刻によって予測計算する予測処理部と、
仮航跡と観測値が対応付け可能かを、前記予測処理部が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部と、
観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部と、
前記航跡尤度評価部が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部と、
仮航跡の予測諸元と前記相関決定部により対応付けられた観測値を使って平滑諸元を計算する平滑処理部と、
仮航跡のうち尤度が高いものを目標航跡とする航跡決定部と
を備えたことを特徴とする多目標追尾装置。
【請求項2】
前記観測値選別部は、観測値の時刻と仮航跡の前サーチにおける平滑時刻の差が、事前に設定された第1の閾値を超えない場合に前記観測値を候補とする
ことを特徴とする請求項1記載の多目標追尾装置。
【請求項3】
前記観測値選別部は、観測値の時刻と仮航跡の前サーチにおける平滑時刻の差が、サーチの角速度とサーチにかかる時間と目標の最大角速度から求めた許容時間差を越えない場合に前記観測値を候補とする
ことを特徴とする請求項1記載の多目標追尾装置。
【請求項4】
前記観測値選別部は、観測値の時刻と仮航跡の前サーチにおける平滑時刻の差が、サーチの角速度とサーチにかかる時間と目標の最大角速度から求めた許容時間差を越えない場合で、かつ、観測値と仮航跡の距離差が、事前に設定された第2の閾値を超えない場合に前記観測値を候補とする
ことを特徴とする請求項1記載の多目標追尾装置。
【請求項5】
前記目標の最大角速度は、前サーチで計算された仮航跡の角速度の中の最大値である
ことを特徴とする請求項3又は4記載の多目標追尾装置。
【請求項6】
センサで観測領域をサーチすることによって得られた観測値を使って目標航跡を作る多目標追尾装置であって、
1サーチで得られた観測値群をグループ分けする観測値グループ分け部と、
グループ毎にグループの重心位置に相当する観測時刻である重心時刻を計算するグループ重心計算部と、
仮航跡と観測値の組み合わせについて、仮航跡を観測値が所属するグループの前記重心時刻によって予測計算する予測処理部と、
仮航跡と観測値が対応付け可能かを、前記予測処理部が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部と、
観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部と、
前記航跡尤度評価部が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部と、
仮航跡の予測諸元と前記相関決定部により対応付けられた観測値を使って平滑諸元を計算する平滑処理部と、
仮航跡のうち尤度が高いものを目標航跡とする航跡決定部と
を備えたことを特徴とする多目標追尾装置。
【請求項7】
センサで観測領域をサーチすることによって得られた観測値を使って目標航跡を作る多目標追尾装置であって、
1サーチで得られた全観測値の重心の位置に相当する観測時刻である全体重心時刻を計算する重心計算部と、
仮航跡と観測値の組み合わせについて、仮航跡を前記全体重心時刻によって予測計算する予測処理部と、
前記全体重心時刻で予測処理したことによる誤差分を考慮して、予測誤差共分散行列を拡大する誤差共分散拡大部と、
仮航跡と観測値が対応付け可能かを、前記予測処理部が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部と、
観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部と、
前記航跡尤度評価部が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部と、
仮航跡の予測諸元と前記相関決定部により対応付けられた観測値を使って平滑諸元を計算する平滑処理部と、
仮航跡のうち尤度が高いものを目標航跡とする航跡決定部と
を備えたことを特徴とする多目標追尾装置。
【請求項8】
センサで観測領域をサーチすることによって得られた観測値を使って目標航跡を作る多目標追尾装置であって、
1サーチで得られた観測値群をグループ分けする観測値グループ分け部と、
グループ毎にグループの重心位置に相当する観測時刻である重心時刻を計算するグループ重心計算部と、
仮航跡と観測値の組み合わせについて、仮航跡を観測値が所属するグループの前記重心時刻によって予測計算する予測処理部と、
前記重心時刻で予測処理したことによる誤差分を考慮して、予測誤差共分散行列を拡大する誤差共分散拡大部と、
仮航跡と観測値が対応付け可能かを、前記予測処理部が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部と、
観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部と、
前記航跡尤度評価部が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部と、
仮航跡の予測諸元と前記相関決定部により対応付けられた観測値を使って平滑諸元を計算する平滑処理部と、
仮航跡のうち尤度が高いものを目標航跡とする航跡決定部と
を備えたことを特徴とする多目標追尾装置。
【請求項9】
センサで観測領域をサーチすることによって得られた観測値を使って目標航跡を作る多目標追尾装置であって、
1サーチで得られた観測値群をグループ分けする観測値グループ分け部と、
観測値のグループと仮航跡のグループ間で相関処理を行うグループ相関計算部と、
仮航跡と観測値の組み合わせについて、仮航跡を観測値の観測時刻によって予測計算する予測処理部と、
仮航跡と観測値が対応付け可能かを、前記予測処理部が計算した仮航跡の予測値と観測値を比較することによって判定するゲート内外判定部と、
観測値を対応付けた場合の仮航跡の尤度を計算する航跡尤度評価部と、
前記航跡尤度評価部が計算した尤度を指標として、どの仮航跡とどの観測値を対応付けるか決定する相関決定部と、
仮航跡の予測諸元と前記相関決定部により対応付けられた観測値を使って平滑諸元を計算する平滑処理部と、
平滑処理に利用した観測値が所属するグループによって、仮航跡のグループ分けをする航跡グループ分け部と、
仮航跡のうち尤度が高いものを目標航跡とする航跡決定部と
を備えたことを特徴とする多目標追尾装置。
【請求項10】
前記観測値グループ分け部は、2つの観測値の観測時刻の差が、事前に設定された第3の閾値を超えない場合に前記2つの観測値を同一グループとする
ことを特徴とする請求項6、8又は9記載の多目標追尾装置。
【請求項11】
前記観測値グループ分け部は、2つの観測値の観測時刻の差が、サーチの角速度とサーチにかかる時間と目標の最大角速度から求めた許容時間差を越えない場合に前記2つの観測値を同一グループとする
ことを特徴とする請求項6、8又は9記載の多目標追尾装置。
【請求項12】
前記観測値グループ分け部は、2つの観測値の観測時刻の差が、サーチの角速度とサーチにかかる時間と目標の最大角速度から求めた許容時間差を越えない場合で、かつ、前記2つの観測値の距離差が、事前に設定された第4の閾値を超えない場合に前記2つの観測値を同一グループとする
ことを特徴とする請求項6、8又は9記載の多目標追尾装置。
【請求項13】
前記誤差共分散拡大部は、事前に設定された目標の最大角速度と、前記全体重心時刻及び各観測値の時刻の差の最大値との積を予測誤差共分散行列の拡大分とする
ことを特徴とする請求項7記載の多目標追尾装置。
【請求項14】
前記誤差共分散拡大部は、仮航跡の速度の最大値と、前記全体重心時刻及び各観測値の時刻の差の最大値との積を予測誤差共分散行列の拡大分とする
ことを特徴とする請求項7記載の多目標追尾装置。
【請求項15】
前記誤差共分散拡大部は、事前に設定された目標の最大角速度と、前記重心時刻及び各観測値の時刻の差の最大値との積を予測誤差共分散行列の拡大分とする
ことを特徴とする請求項8記載の多目標追尾装置。
【請求項16】
前記誤差共分散拡大部は、仮航跡の速度の最大値と、前記重心時刻及び各観測値の時刻の差の最大値との積を予測誤差共分散行列の拡大分とする
ことを特徴とする請求項8記載の多目標追尾装置。
【図1】

【図2】
【図3】

【図4】

【図5】
【図6】
【図7】

【図8】

【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】

【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【公開番号】特開2007−292553(P2007−292553A)
【公開日】平成19年11月8日(2007.11.8)
【国際特許分類】
【出願番号】特願2006−119462(P2006−119462)
【出願日】平成18年4月24日(2006.4.24)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成19年11月8日(2007.11.8)
【国際特許分類】
【出願日】平成18年4月24日(2006.4.24)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]