
多結晶シリコンロッド解体機および解体装置
【課題】反応炉内に形成された多結晶シリコンロッドを、破損させず安全にかつ効率よく搬出する。
【解決手段】1本のシリコンロッドRを把持する複数のクランプ20を備えるハンド部11と、前記ハンド部を回動自在に保持する回動部12と、前記回動部を助力移動可能に保持するバランサー部13とを備え、複数の前記クランプは、それぞれ独立して開閉可能であり、立設状態のシリコンロッドを上下方向に並んだ複数の前記クランプで把持して、前記回動部により前記クランプが横方向に並ぶように前記ハンド部を回動させることにより、前記シリコンロッドを横置状態に移動させる多結晶シリコンロッド解体機10。
【解決手段】1本のシリコンロッドRを把持する複数のクランプ20を備えるハンド部11と、前記ハンド部を回動自在に保持する回動部12と、前記回動部を助力移動可能に保持するバランサー部13とを備え、複数の前記クランプは、それぞれ独立して開閉可能であり、立設状態のシリコンロッドを上下方向に並んだ複数の前記クランプで把持して、前記回動部により前記クランプが横方向に並ぶように前記ハンド部を回動させることにより、前記シリコンロッドを横置状態に移動させる多結晶シリコンロッド解体機10。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、反応炉内で製造された多結晶シリコンロッドの解体機および解体装置に関する。
【背景技術】
【0002】
一般に、半導体材料となる高純度の多結晶シリコンの製造方法として、シーメンス法が知られている。シーメンス法は、クロロシランと水素との混合ガスからなる原料ガスを加熱したシードに接触させ、その表面に原料ガスの熱分解および水素還元によって生じた多結晶シリコンを析出させる製造方法である。この製造方法を実施する装置として、密閉した反応炉の炉底に設置された電極ユニットを介して多数のシリコン芯棒を立設した多結晶シリコン反応炉が用いられている。
【0003】
反応炉において、上下方向に沿って設けられた2本の棒状のシリコン芯棒と、これらシリコン芯棒の上端部同士を接続する連結部材とによりΠ字状(逆U字状)に形成されたシード組立体が固定されている。このシード組立体に電極ユニットを通じて電流が供給されてジュール熱が発生し、高温に加熱されることにより、シード組立体の表面上に多結晶シリコンが析出し、多結晶シリコンロッドが形成される。
【0004】
形成された多結晶シリコンロッドは、その基端部で切断・分離されて炉外に搬出されるが、倒れやすいため、破損がないように安全に搬出することが課題となる。もし搬出前にロッドが反応炉内で倒れた場合には、搬出前の他のロッドを倒してしまい、大量のロッドを破損させてしまうおそれがある。特許文献1には、シリコンロッドを樋状のホルダに保持させて移動台車で搬出するロッド解体機が記載されている。特許文献2には、逆U字状に立った状態の2本のシリコンロッドを、アームの先端部に備えられた把持機構により2本同時に把持して搬出するロッド解体機が記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特公平7−29045号公報
【特許文献2】特開2002−210355号公報
【特許文献3】特開平6−172092号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載されたロッド解体機によれば、樋状のホルダの中にシリコンロッドを押し倒すことにより、容易にシリコンロッドを保持させることができる。しかしながら、ホルダが取り付けられた移動台車をシリコンロッドの直近に移動しなければならならず、また、移動台車を移動させてホルダの位置をシリコンロッドの立設位置に合わせる作業が困難であるという問題があった。
【0007】
これに対して特許文献2に記載されたロッド解体機によれば、可動台から延びるアームの先端部にロッド保持部が設けられているので、アームを伸縮させるだけでロッド保持部を広範囲に移動させ、シリコンロッドの立設位置に合わせることができる。しかしながら、シリコンロッドは反応炉内に導入している原料ガスとの接触状態や表面の温度にバラツキが生じたりすると、シリコンの析出過程で径が不均一になったり、シード組立体が撓っているとシリコン析出後、シリコンロッド自体が撓ってしまう場合があるため、特許文献2で記載されているシリコンロッドを支え部に当てて、その後、固定爪でシリコンロッドを把持する際に支え部とシリコンロッドの間に隙間が生じていると、把持箇所に不均一な力がかかりやすく、固定爪で固定を行った際に、クラックや割れの発生するおそれがある。
【0008】
また、特許文献1,2のロッド解体機は、シリコンロッドを2本同時に把持する方法が説明されている。しかしながら、2本同時にシリコンロッドを上下部で把持する場合、ロッドを支えるホルダや支え部がシリコンロッドの側面(ホルダや支え部の面)とほぼ平行になるような位置に、ホルダや支え部の長さ全体に対して正対させる必要がある。平行状態に正対させないでシリコンロッドを把持しようとすると、上下の把持タイミングがずれて、シリコンロッドの折損が発生し、下端部で分離できない場合も発生するおそれがあるため、シリコンロッド把持時の位置調整に手間がかかる。
【0009】
特に、シリコンロッドが特許文献3に示すような概略同心円状に位置するような場合には、解体機の把持部の向きや位置調整を行う際に、シリコンロッドに接触しやすく、破損や折損、さらには倒壊する可能性が高くなるおそれがある。
【0010】
また、特許文献1,2では、シリコンロッドを把持した後、解体機の把持部を傾斜または前後に揺すり、シリコンロッドの下端部を折ることで分離したり、または、特許文献2では把持部を押し上げてシリコンロッドを分離したりする方法が説明されている。しかし、シリコンロッドを形成する反応炉では、高温状態での反応を行うことにより反応炉自体を冷媒等で冷却する方法が一般的に採用されている。このため、反応炉の外周部分に近いところのシリコンロッドは反応中に反応炉側壁からの冷却の影響を受けることもあり、ロッド内部に歪が蓄積しやすく、割れ等が生じやすい。このため、上記のようなシリコンロッドの分離を行うと、分離の最中にシリコンロッドが折れて落下して割れたり、折れたシリコンロッドが周辺の立設しているシリコンロッドに接触したりすることで、将棋倒しのようにシリコンロッドの倒壊が発生する恐れがあり、危険である。
【0011】
本発明は、このような事情に鑑みてなされたもので、反応炉内に形成された多結晶シリコンロッドを、破損させず安全にかつ効率よく搬出することを目的とする。
【課題を解決するための手段】
【0012】
本発明は、1本のシリコンロッドを把持する複数のクランプを備えるハンド部と、前記ハンド部を回動自在に保持する回動部と、前記回動部を助力移動可能に保持するバランサー部とを備え、複数の前記クランプは、それぞれ独立して開閉可能であり、立設状態のシリコンロッドを上下方向に並んだ複数の前記クランプで把持して、前記回動部により前記クランプが横方向に並ぶように前記ハンド部を回動させることにより、前記シリコンロッドを横置状態に移動させる多結晶シリコンロッド解体機である。
【0013】
この多結晶シリコンロッド解体機によれば、1本のシリコンロッドを複数箇所で把持するので、安定してロッドを搬出できる。また、複数のクランプがそれぞれ独立して開閉するので、径が均一ではないロッドや曲がったロッドであっても、把持部分の外周面に応じて適切な力で把持でき、ロッドを破損させることなく確実に搬出できる。さらに、1つのクランプでロッドを把持してその基端部を切断後に複数のクランプでロッドを把持できるので、折ったロッドを支える作業者の減員が可能となる。
【0014】
この多結晶シリコンロッド解体機において、各前記クランプは、所定の角度をなして設けられそれぞれ前記シリコンロッドの外面が当接される2つの当接面を有する位置決め部と、この位置決め部を挟んで配置され各前記当接面に向けてそれぞれ前記シリコンロッドを押圧する一対の爪とを備えることが好ましい。この場合、シリコンロッドに対して2面で当接することにより、クランプをシリコンロッドに対して適切に配置できる。また、その状態で爪がシリコンロッドを当接面に向けて押圧するので、確実にシリコンロッドを把持できる。
【0015】
この多結晶シリコンロッド解体機において、さらに、前記位置決め部に、前記シリコンロッドの当接を感知するセンサが備えられていることが好ましい。この場合、シリコンロッドを把持しようとする際に、シリコンロッドに当接したらハンド部の移動を停止させることができるので、把持前にシリコンロッドを折ってしまうことを防止できる。
【0016】
また本発明は、前記多結晶シリコンロッド解体機と、炉底の上方を水平移動可能な作業台車と、搬出台車とを有する多結晶シリコンロッド解体装置である。この解体装置によれば、作業台車上に作業者を乗せて反応炉の炉底上の任意の場所で作業を行うことができるとともに、取り出したシリコンロッドを搬出台車に乗せて容易に搬出することができる。
【発明の効果】
【0017】
本発明の多結晶シリコンロッド解体機によれば、反応炉内に形成された多結晶シリコンロッドを、たとえ径が不均一であっても、破損させず安全にかつ効率よく搬出することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の多結晶シリコンロッド解体機を示す側面図である。
【図2】本発明の多結晶シリコンロッド解体機の要部を示す平面図である。
【図3】シリコンロッドを把持する状態を示す模式図である。
【発明を実施するための形態】
【0019】
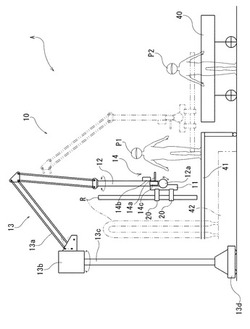
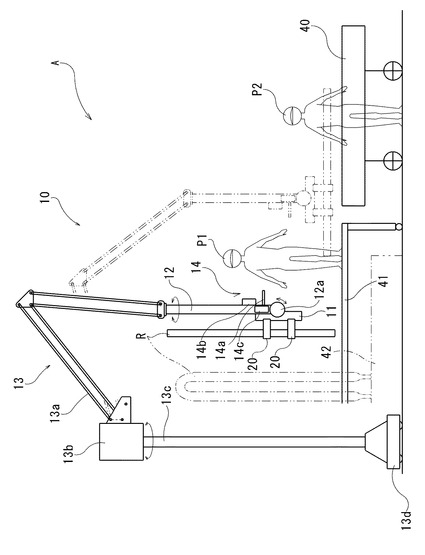
以下、本発明に係る多結晶シリコンロッド解体機10および多結晶シリコンロッド解体装置Aの実施形態について説明する。本実施形態の多結晶シリコンロッド解体機10は、図1に示すように、1本のシリコンロッドRを把持する複数(本実施形態では2つ)のクランプ20(図2参照)を備えるハンド部11と、ハンド部11を回動自在に保持する回動部12と、回動部12を助力移動可能に保持するバランサー部13とを備え、立設状態のシリコンロッドRを上下方向に並んだ複数(本実施形態では2つ)のクランプ20で把持して、回動部12によりクランプ20が横方向に並ぶようにハンド部11を回動させることにより、図1に二点鎖線で示すように、シリコンロッドRを横置状態に移動させ、搬出することができる。
【0020】
多結晶シリコンロッド解体装置Aは、この多結晶シリコンロッド解体機10と、多結晶シリコンロッド解体機10を用いて解体したシリコンロッドRを反応炉から取り出す作業者P1が乗る作業台車41と、作業者P1からシリコンロッドRを渡された作業者P2がシリコンロッドRを搭載する搬出台車40とを備える。
【0021】
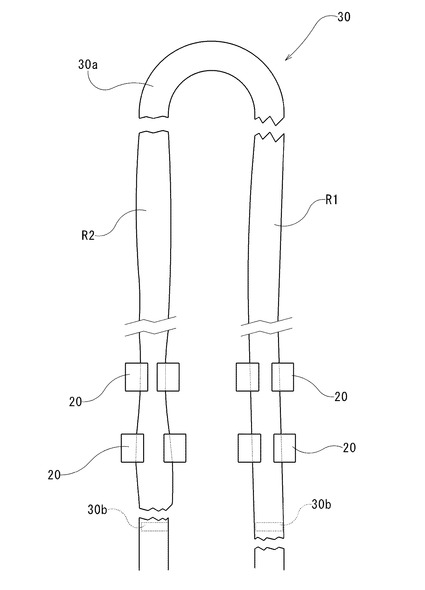
多結晶シリコンロッド解体機10を用いて解体される多結晶シリコンロッド30は、反応炉の炉底42上にΠ字状に立設して形成されたシード組立体(図示せず)を芯として成長することにより、図1に示すように炉底42上にΠ字状に形成される。このΠ字状の多結晶シリコンロッド30は、図3に示すようにシリコンロッドRをΠ字状に構成する上部の連結部30aが取り除かれるとともに、基端部で切断・分離することより解体され、これにより棒状のシリコンロッドRが得られる。このロッド30において連結部30aを取り除き基端部で切断・分離する作業は、作業者(図示せず)が手で行う作業である。これら連結部30aとシリコンロッドRとは、別々に回収され、さらにシリコンロッドRは、シード組立体を支えるカーボン電極30bを含むシリコンロッドR1と含まないシリコンロッドR2とに区別される。
【0022】
これら連結部30a、カーボン電極30bを含むシリコンロッドR1および含まないシリコンロッドR2は、回収するシリコンへのカーボンの混入を防止するために、それぞれ別々の搬出台車40によって運搬される。そして、カーボン電極30bを含むシリコンロッドRは、回収するシリコンへのカーボンの混入を防止するために、搬出台車40上にカーボン電極30bが接触しないようにして、位置を揃えるように載せられ、後工程においてカーボン電極30bは除去される。
【0023】
この多結晶シリコンロッド解体機10は、作業台車41上の作業者P1と、地上の作業者P2とが操作する。すなわち、作業者P1は、反応炉の炉底42上に立設するシリコンロッドRをクランプ20に把持させ、移動させて作業者P2に渡す。作業者P2は、作業者P1から渡されたシリコンロッドRを種類別に搬出台車40に載置し、搬出可能とする。
【0024】
作業者P1は、炉底42の上方を水平移動可能な作業台車41上に乗って作業を行う。作業者P1は、この作業台車41によって反応炉の炉底42の上方を移動できるので、解体する多結晶シリコンロッド30に近接して作業を行うことができる。また、多結晶シリコンロッドRを搬出する搬出台車40は、作業者P1からのシリコンロッドRの受け渡しが容易な位置に移動させることができる。
【0025】
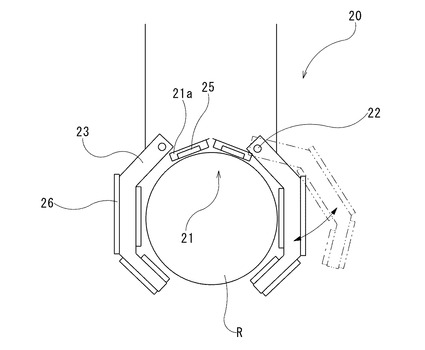
多結晶シリコンロッド解体機10についてより詳しく説明する。シリコンロッドRを把持するクランプ20は、図2に示すように、所定の角度をなして設けられそれぞれシリコンロッドRの外面が当接される2つの当接板21aを有する位置決め部21と、ピボット軸22を中心に回動して位置決め部21を挟んで開閉し、位置決め部21の各当接板21aに向けてそれぞれシリコンロッドRを周囲方向より押圧する一対の爪23と、これら爪23を駆動する駆動部(図示せず)とを備えている。当接板21aは、回収するシリコンロッドRの汚染を防止するため、超硬合金で形成されている。また、クランプ20がシリコンロッドRに触れた場合のシリコンロッドRに対する汚染を防止するため、クランプ20の爪23の外側には、超硬合金で形成されたカバー板26が取り付けられている。
【0026】
クランプ20の位置決め部21においては、当接板21a同士が鈍角を形成するように取り付けられている。したがって、シリコンロッドRの外周面に当接板21aを当接させることにより、シリコンロッドRに対してクランプ20を適切に位置決めできる。また、この位置決め部21の各当接板21aには、シリコンロッドRの当接を感知するセンサ25が備えられている。このため、シリコンロッドRとの接触の感知に伴い、アーム支持部13bに内蔵されてクランプ20(アーム部13a)の移動を停止するブレーキ機構を作動させることにより、シリコンロッドRを把持前に必要以上に押して破損させてしまうことを防止できる。
【0027】
ハンド部11には、このクランプ20が複数(本実施形態では2個)、1本のシリコンロッドRを把持可能に取り付けられている。これらのクランプ20がそれぞれ独立して開閉可能であるため、図3に示すように、太さが不均一であるシリコンロッドRであっても、把持部位の状態に応じて各クランプ20を駆動し、確実に把持させることができる。
【0028】
より具体的には、当接板21aをシリコンロッドRに当接させながら各クランプ20を閉じると、この把持力によりシリコンロッドRの形状や太さに応じてセンサ25に圧力が加えられる。シリコンロッドRの太さや形状は各部位によって異なるので、各クランプ20が適度な力でシリコンロッドRを把持したことをセンサ25によって確認し、そのクランプ20の動作を停止させることにより、シリコンロッドRの各部位に応じた力でクランプ20にシリコンロッドRを把持させることができる。
【0029】
ハンド部11は、水平方向に延びる回動軸12aを中心に回動部12に対して回動自在に保持されている。回動軸12aは、ハンド部11に備えられた2つのクランプ20のほぼ中間に設けられている。また、回動部12において、回動軸12aの上端部からの長さが十分となるようにハンド部11が設けられている。これにより、シリコンロッドRの下部をクランプ20が把持した場合であっても、シリコンロッドRの上端部とバランサー部13とが干渉しにくく、シリコンロッドRを搬出する際にシリコンロッドRがバランサー部13によって破損したり汚染されたりするのを防止することができる。
【0030】
ハンド部11を保持する回動部12には、シリコンロッドRを把持する際のクランプ20に対して回動軸12aを挟んでほぼ反対側に、操作部14が設けられている。操作部14には握り部14aや操作スイッチ部14b,14c等が備えられており、作業者P1,P2はこの操作部14を用いてハンド部11の移動やクランプ20の開閉等の操作を行う。
【0031】
なお、操作スイッチ部14bは、作業者P1の操作用に設けられており、クランプ20の開閉およびハンド部11の回動を行うことができる。一方、操作スイッチ部14cは、作業者P2の操作用に設けられており、クランプ20の開閉およびハンド部11の上下動を行うことができる。各作業者P1,P2が操作しやすいように、作業者P2用の操作スイッチ部14cは作業者P1用の操作スイッチ部14bよりも下方に、かつ操作スイッチ部14bとは異なる方向に向かって備えられている。
【0032】
回動部12を助力移動可能に保持するバランサー部13は、リンク機構により姿勢を変化させずに回動部12を移動可能に保持するアーム部13aと、アーム部13aが取り付けられたアーム支持部13bと、アーム支持部13bを支柱13cまわりに旋回可能に保持するベース部13dとを備えている。したがって、ハンド部11に把持されたシリコンロッドRを所望の位置に助力移動可能であり、さらにハンド部11を回動させることにより多結晶シリコンロッド30形成時の略垂直状態から回収時の略水平状態に姿勢変化させることができる。
【0033】
この多結晶シリコンロッド解体機10を用いてシリコンロッドRを解体する際は、図3に示すように、逆U字状に形成された多結晶シリコンロッド30の上部の連結部30aを取り除き、1本のシリコンロッドRを2つのクランプ20で把持して、1本ずつ搬出する。この多結晶シリコンロッド解体機10においては、作業者P1が握り部14aをつかんでハンド部11を移動させ、爪23を開いた状態でクランプ20の当接板21aをシリコンロッドRの外周面に当接させることによりクランプ20を位置決めした状態で爪23を閉じて、シリコンロッドRを把持させる。
【0034】
したがって、シリコンロッドRを両爪23の中央部に位置させ、安定して把持することができる。また、シリコンロッドRを把持する各クランプ20がそれぞれ独立して開閉可能であるので、シリコンロッドRの太さが不均一であっても、各クランプ20で各部位を把持して搬出することができる。そして、カーボン電極30bを含むシリコンロッドR、含まないシリコンロッドR、および連結部30aをそれぞれ別の搬出台車40に集めて、搬出する。なお、各搬出台車40において、各シリコンロッドRおよび連結部30aは、ポリエチレン製袋に入れられ、外部からの汚染が防止されている。
【0035】
また、この多結晶シリコンロッド解体機10においては各クランプ20が独立して開閉可能であるので、シリコンロッドRを一つのクランプ20のみで把持するとともに他のクランプ20は開放状態として、割れの有無を確認する打音検査を行うことも可能である。
【0036】
さらに、逆U字状の多結晶シリコンロッド30を分割する際に一つのクランプ20のみでシリコンロッドRを把持することができ、シリコンロッドRの基端部を切断した後に二つのクランプ20で確実にシリコンロッドRを把持することができる。すなわち、同時に複数のクランプでシリコンロッドRを把持する場合には、シリコンロッドRの基端部を切断する際にはクランプによる把持ができないため、シリコンロッドRを支える作業者が必要である。これに対して、この多結晶シリコンロッド解体機10によれば、クランプ20で把持した状態でシリコンロッドRの基端部を切断することができるので、シリコンロッドRを支える作業者の減員が可能である。
【0037】
以上説明したように、この多結晶シリコンロッド解体機10によれば、1本のシリコンロッドRを2箇所で把持するので、安定してシリコンロッドRを搬出できる。また、各クランプ20がそれぞれ独立して開閉するので、径が均一ではないシリコンロッドRであっても、把持部分の太さに応じて適切な力で把持でき、シリコンロッドRを破損させることなく確実に搬出できる。
【0038】
また、クランプ20には、シリコンロッドRとの接触を感知するセンサ25が備えられているので、シリコンロッドRを把持する前にクランプ20の当接板21aと接触あるいは当たることにより倒してしまう事故を防止できる。
【0039】
なお、本発明は前記実施形態の構成のものに限定されるものではなく、細部構成においては、本発明の趣旨を逸脱しない範囲において種々の変更を加えることが可能である。たとえば、位置決め部は、前記実施形態では2枚の平板(当接板21a)で構成したが、シリコンロッドRを位置決めできる当接板を備えていればよく、シリコンロッドRの外周面より大きい円弧板などであってもよい。
【0040】
本発明の多結晶シリコンロッド解体機において、把持したシリコンロッドの打音検査を行う場合、打音時の周波数を確認して、シリコンロッドのクラックや割れの有無を判断してもよい。
【0041】
また、本発明の多結晶シリコンロッド解体機において、シリコンロッドを把持する際のクランプ位置は可変できるような機構(シリコンロッドをクランプした際の安定性を確保できるように各クランプ間の間隔を変えられるようにした構造)でもよい。
【0042】
また、本発明の多結晶シリコンロッド解体機において、クランプのシリコンロッドと接触する当接板、カバー板などには、シリコンの汚染防止のために、Si製、SiC製の板材もしくは、SiCコーティングを施した板材を用いてもよい。
【符号の説明】
【0043】
10 多結晶シリコンロッド解体機
11 ハンド部
12 回動部
12a 回動軸
13 バランサー部
13a アーム部
13b アーム支持部
13c 支柱
13d ベース部
14 操作部
14a 握り部
14b,14c 操作スイッチ部
20 クランプ
21 位置決め部
21a 当接板
22 ピボット軸
23 爪
25 センサ
26 カバー板
30 多結晶シリコンロッド
30a 連結部
40 搬出台車
41 作業台車
42 炉底
A 多結晶シリコンロッド解体装置
P1,P2 作業者
R,R1,R2 シリコンロッド
【技術分野】
【0001】
本発明は、反応炉内で製造された多結晶シリコンロッドの解体機および解体装置に関する。
【背景技術】
【0002】
一般に、半導体材料となる高純度の多結晶シリコンの製造方法として、シーメンス法が知られている。シーメンス法は、クロロシランと水素との混合ガスからなる原料ガスを加熱したシードに接触させ、その表面に原料ガスの熱分解および水素還元によって生じた多結晶シリコンを析出させる製造方法である。この製造方法を実施する装置として、密閉した反応炉の炉底に設置された電極ユニットを介して多数のシリコン芯棒を立設した多結晶シリコン反応炉が用いられている。
【0003】
反応炉において、上下方向に沿って設けられた2本の棒状のシリコン芯棒と、これらシリコン芯棒の上端部同士を接続する連結部材とによりΠ字状(逆U字状)に形成されたシード組立体が固定されている。このシード組立体に電極ユニットを通じて電流が供給されてジュール熱が発生し、高温に加熱されることにより、シード組立体の表面上に多結晶シリコンが析出し、多結晶シリコンロッドが形成される。
【0004】
形成された多結晶シリコンロッドは、その基端部で切断・分離されて炉外に搬出されるが、倒れやすいため、破損がないように安全に搬出することが課題となる。もし搬出前にロッドが反応炉内で倒れた場合には、搬出前の他のロッドを倒してしまい、大量のロッドを破損させてしまうおそれがある。特許文献1には、シリコンロッドを樋状のホルダに保持させて移動台車で搬出するロッド解体機が記載されている。特許文献2には、逆U字状に立った状態の2本のシリコンロッドを、アームの先端部に備えられた把持機構により2本同時に把持して搬出するロッド解体機が記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特公平7−29045号公報
【特許文献2】特開2002−210355号公報
【特許文献3】特開平6−172092号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載されたロッド解体機によれば、樋状のホルダの中にシリコンロッドを押し倒すことにより、容易にシリコンロッドを保持させることができる。しかしながら、ホルダが取り付けられた移動台車をシリコンロッドの直近に移動しなければならならず、また、移動台車を移動させてホルダの位置をシリコンロッドの立設位置に合わせる作業が困難であるという問題があった。
【0007】
これに対して特許文献2に記載されたロッド解体機によれば、可動台から延びるアームの先端部にロッド保持部が設けられているので、アームを伸縮させるだけでロッド保持部を広範囲に移動させ、シリコンロッドの立設位置に合わせることができる。しかしながら、シリコンロッドは反応炉内に導入している原料ガスとの接触状態や表面の温度にバラツキが生じたりすると、シリコンの析出過程で径が不均一になったり、シード組立体が撓っているとシリコン析出後、シリコンロッド自体が撓ってしまう場合があるため、特許文献2で記載されているシリコンロッドを支え部に当てて、その後、固定爪でシリコンロッドを把持する際に支え部とシリコンロッドの間に隙間が生じていると、把持箇所に不均一な力がかかりやすく、固定爪で固定を行った際に、クラックや割れの発生するおそれがある。
【0008】
また、特許文献1,2のロッド解体機は、シリコンロッドを2本同時に把持する方法が説明されている。しかしながら、2本同時にシリコンロッドを上下部で把持する場合、ロッドを支えるホルダや支え部がシリコンロッドの側面(ホルダや支え部の面)とほぼ平行になるような位置に、ホルダや支え部の長さ全体に対して正対させる必要がある。平行状態に正対させないでシリコンロッドを把持しようとすると、上下の把持タイミングがずれて、シリコンロッドの折損が発生し、下端部で分離できない場合も発生するおそれがあるため、シリコンロッド把持時の位置調整に手間がかかる。
【0009】
特に、シリコンロッドが特許文献3に示すような概略同心円状に位置するような場合には、解体機の把持部の向きや位置調整を行う際に、シリコンロッドに接触しやすく、破損や折損、さらには倒壊する可能性が高くなるおそれがある。
【0010】
また、特許文献1,2では、シリコンロッドを把持した後、解体機の把持部を傾斜または前後に揺すり、シリコンロッドの下端部を折ることで分離したり、または、特許文献2では把持部を押し上げてシリコンロッドを分離したりする方法が説明されている。しかし、シリコンロッドを形成する反応炉では、高温状態での反応を行うことにより反応炉自体を冷媒等で冷却する方法が一般的に採用されている。このため、反応炉の外周部分に近いところのシリコンロッドは反応中に反応炉側壁からの冷却の影響を受けることもあり、ロッド内部に歪が蓄積しやすく、割れ等が生じやすい。このため、上記のようなシリコンロッドの分離を行うと、分離の最中にシリコンロッドが折れて落下して割れたり、折れたシリコンロッドが周辺の立設しているシリコンロッドに接触したりすることで、将棋倒しのようにシリコンロッドの倒壊が発生する恐れがあり、危険である。
【0011】
本発明は、このような事情に鑑みてなされたもので、反応炉内に形成された多結晶シリコンロッドを、破損させず安全にかつ効率よく搬出することを目的とする。
【課題を解決するための手段】
【0012】
本発明は、1本のシリコンロッドを把持する複数のクランプを備えるハンド部と、前記ハンド部を回動自在に保持する回動部と、前記回動部を助力移動可能に保持するバランサー部とを備え、複数の前記クランプは、それぞれ独立して開閉可能であり、立設状態のシリコンロッドを上下方向に並んだ複数の前記クランプで把持して、前記回動部により前記クランプが横方向に並ぶように前記ハンド部を回動させることにより、前記シリコンロッドを横置状態に移動させる多結晶シリコンロッド解体機である。
【0013】
この多結晶シリコンロッド解体機によれば、1本のシリコンロッドを複数箇所で把持するので、安定してロッドを搬出できる。また、複数のクランプがそれぞれ独立して開閉するので、径が均一ではないロッドや曲がったロッドであっても、把持部分の外周面に応じて適切な力で把持でき、ロッドを破損させることなく確実に搬出できる。さらに、1つのクランプでロッドを把持してその基端部を切断後に複数のクランプでロッドを把持できるので、折ったロッドを支える作業者の減員が可能となる。
【0014】
この多結晶シリコンロッド解体機において、各前記クランプは、所定の角度をなして設けられそれぞれ前記シリコンロッドの外面が当接される2つの当接面を有する位置決め部と、この位置決め部を挟んで配置され各前記当接面に向けてそれぞれ前記シリコンロッドを押圧する一対の爪とを備えることが好ましい。この場合、シリコンロッドに対して2面で当接することにより、クランプをシリコンロッドに対して適切に配置できる。また、その状態で爪がシリコンロッドを当接面に向けて押圧するので、確実にシリコンロッドを把持できる。
【0015】
この多結晶シリコンロッド解体機において、さらに、前記位置決め部に、前記シリコンロッドの当接を感知するセンサが備えられていることが好ましい。この場合、シリコンロッドを把持しようとする際に、シリコンロッドに当接したらハンド部の移動を停止させることができるので、把持前にシリコンロッドを折ってしまうことを防止できる。
【0016】
また本発明は、前記多結晶シリコンロッド解体機と、炉底の上方を水平移動可能な作業台車と、搬出台車とを有する多結晶シリコンロッド解体装置である。この解体装置によれば、作業台車上に作業者を乗せて反応炉の炉底上の任意の場所で作業を行うことができるとともに、取り出したシリコンロッドを搬出台車に乗せて容易に搬出することができる。
【発明の効果】
【0017】
本発明の多結晶シリコンロッド解体機によれば、反応炉内に形成された多結晶シリコンロッドを、たとえ径が不均一であっても、破損させず安全にかつ効率よく搬出することができる。
【図面の簡単な説明】
【0018】
【図1】本発明の多結晶シリコンロッド解体機を示す側面図である。
【図2】本発明の多結晶シリコンロッド解体機の要部を示す平面図である。
【図3】シリコンロッドを把持する状態を示す模式図である。
【発明を実施するための形態】
【0019】
以下、本発明に係る多結晶シリコンロッド解体機10および多結晶シリコンロッド解体装置Aの実施形態について説明する。本実施形態の多結晶シリコンロッド解体機10は、図1に示すように、1本のシリコンロッドRを把持する複数(本実施形態では2つ)のクランプ20(図2参照)を備えるハンド部11と、ハンド部11を回動自在に保持する回動部12と、回動部12を助力移動可能に保持するバランサー部13とを備え、立設状態のシリコンロッドRを上下方向に並んだ複数(本実施形態では2つ)のクランプ20で把持して、回動部12によりクランプ20が横方向に並ぶようにハンド部11を回動させることにより、図1に二点鎖線で示すように、シリコンロッドRを横置状態に移動させ、搬出することができる。
【0020】
多結晶シリコンロッド解体装置Aは、この多結晶シリコンロッド解体機10と、多結晶シリコンロッド解体機10を用いて解体したシリコンロッドRを反応炉から取り出す作業者P1が乗る作業台車41と、作業者P1からシリコンロッドRを渡された作業者P2がシリコンロッドRを搭載する搬出台車40とを備える。
【0021】
多結晶シリコンロッド解体機10を用いて解体される多結晶シリコンロッド30は、反応炉の炉底42上にΠ字状に立設して形成されたシード組立体(図示せず)を芯として成長することにより、図1に示すように炉底42上にΠ字状に形成される。このΠ字状の多結晶シリコンロッド30は、図3に示すようにシリコンロッドRをΠ字状に構成する上部の連結部30aが取り除かれるとともに、基端部で切断・分離することより解体され、これにより棒状のシリコンロッドRが得られる。このロッド30において連結部30aを取り除き基端部で切断・分離する作業は、作業者(図示せず)が手で行う作業である。これら連結部30aとシリコンロッドRとは、別々に回収され、さらにシリコンロッドRは、シード組立体を支えるカーボン電極30bを含むシリコンロッドR1と含まないシリコンロッドR2とに区別される。
【0022】
これら連結部30a、カーボン電極30bを含むシリコンロッドR1および含まないシリコンロッドR2は、回収するシリコンへのカーボンの混入を防止するために、それぞれ別々の搬出台車40によって運搬される。そして、カーボン電極30bを含むシリコンロッドRは、回収するシリコンへのカーボンの混入を防止するために、搬出台車40上にカーボン電極30bが接触しないようにして、位置を揃えるように載せられ、後工程においてカーボン電極30bは除去される。
【0023】
この多結晶シリコンロッド解体機10は、作業台車41上の作業者P1と、地上の作業者P2とが操作する。すなわち、作業者P1は、反応炉の炉底42上に立設するシリコンロッドRをクランプ20に把持させ、移動させて作業者P2に渡す。作業者P2は、作業者P1から渡されたシリコンロッドRを種類別に搬出台車40に載置し、搬出可能とする。
【0024】
作業者P1は、炉底42の上方を水平移動可能な作業台車41上に乗って作業を行う。作業者P1は、この作業台車41によって反応炉の炉底42の上方を移動できるので、解体する多結晶シリコンロッド30に近接して作業を行うことができる。また、多結晶シリコンロッドRを搬出する搬出台車40は、作業者P1からのシリコンロッドRの受け渡しが容易な位置に移動させることができる。
【0025】
多結晶シリコンロッド解体機10についてより詳しく説明する。シリコンロッドRを把持するクランプ20は、図2に示すように、所定の角度をなして設けられそれぞれシリコンロッドRの外面が当接される2つの当接板21aを有する位置決め部21と、ピボット軸22を中心に回動して位置決め部21を挟んで開閉し、位置決め部21の各当接板21aに向けてそれぞれシリコンロッドRを周囲方向より押圧する一対の爪23と、これら爪23を駆動する駆動部(図示せず)とを備えている。当接板21aは、回収するシリコンロッドRの汚染を防止するため、超硬合金で形成されている。また、クランプ20がシリコンロッドRに触れた場合のシリコンロッドRに対する汚染を防止するため、クランプ20の爪23の外側には、超硬合金で形成されたカバー板26が取り付けられている。
【0026】
クランプ20の位置決め部21においては、当接板21a同士が鈍角を形成するように取り付けられている。したがって、シリコンロッドRの外周面に当接板21aを当接させることにより、シリコンロッドRに対してクランプ20を適切に位置決めできる。また、この位置決め部21の各当接板21aには、シリコンロッドRの当接を感知するセンサ25が備えられている。このため、シリコンロッドRとの接触の感知に伴い、アーム支持部13bに内蔵されてクランプ20(アーム部13a)の移動を停止するブレーキ機構を作動させることにより、シリコンロッドRを把持前に必要以上に押して破損させてしまうことを防止できる。
【0027】
ハンド部11には、このクランプ20が複数(本実施形態では2個)、1本のシリコンロッドRを把持可能に取り付けられている。これらのクランプ20がそれぞれ独立して開閉可能であるため、図3に示すように、太さが不均一であるシリコンロッドRであっても、把持部位の状態に応じて各クランプ20を駆動し、確実に把持させることができる。
【0028】
より具体的には、当接板21aをシリコンロッドRに当接させながら各クランプ20を閉じると、この把持力によりシリコンロッドRの形状や太さに応じてセンサ25に圧力が加えられる。シリコンロッドRの太さや形状は各部位によって異なるので、各クランプ20が適度な力でシリコンロッドRを把持したことをセンサ25によって確認し、そのクランプ20の動作を停止させることにより、シリコンロッドRの各部位に応じた力でクランプ20にシリコンロッドRを把持させることができる。
【0029】
ハンド部11は、水平方向に延びる回動軸12aを中心に回動部12に対して回動自在に保持されている。回動軸12aは、ハンド部11に備えられた2つのクランプ20のほぼ中間に設けられている。また、回動部12において、回動軸12aの上端部からの長さが十分となるようにハンド部11が設けられている。これにより、シリコンロッドRの下部をクランプ20が把持した場合であっても、シリコンロッドRの上端部とバランサー部13とが干渉しにくく、シリコンロッドRを搬出する際にシリコンロッドRがバランサー部13によって破損したり汚染されたりするのを防止することができる。
【0030】
ハンド部11を保持する回動部12には、シリコンロッドRを把持する際のクランプ20に対して回動軸12aを挟んでほぼ反対側に、操作部14が設けられている。操作部14には握り部14aや操作スイッチ部14b,14c等が備えられており、作業者P1,P2はこの操作部14を用いてハンド部11の移動やクランプ20の開閉等の操作を行う。
【0031】
なお、操作スイッチ部14bは、作業者P1の操作用に設けられており、クランプ20の開閉およびハンド部11の回動を行うことができる。一方、操作スイッチ部14cは、作業者P2の操作用に設けられており、クランプ20の開閉およびハンド部11の上下動を行うことができる。各作業者P1,P2が操作しやすいように、作業者P2用の操作スイッチ部14cは作業者P1用の操作スイッチ部14bよりも下方に、かつ操作スイッチ部14bとは異なる方向に向かって備えられている。
【0032】
回動部12を助力移動可能に保持するバランサー部13は、リンク機構により姿勢を変化させずに回動部12を移動可能に保持するアーム部13aと、アーム部13aが取り付けられたアーム支持部13bと、アーム支持部13bを支柱13cまわりに旋回可能に保持するベース部13dとを備えている。したがって、ハンド部11に把持されたシリコンロッドRを所望の位置に助力移動可能であり、さらにハンド部11を回動させることにより多結晶シリコンロッド30形成時の略垂直状態から回収時の略水平状態に姿勢変化させることができる。
【0033】
この多結晶シリコンロッド解体機10を用いてシリコンロッドRを解体する際は、図3に示すように、逆U字状に形成された多結晶シリコンロッド30の上部の連結部30aを取り除き、1本のシリコンロッドRを2つのクランプ20で把持して、1本ずつ搬出する。この多結晶シリコンロッド解体機10においては、作業者P1が握り部14aをつかんでハンド部11を移動させ、爪23を開いた状態でクランプ20の当接板21aをシリコンロッドRの外周面に当接させることによりクランプ20を位置決めした状態で爪23を閉じて、シリコンロッドRを把持させる。
【0034】
したがって、シリコンロッドRを両爪23の中央部に位置させ、安定して把持することができる。また、シリコンロッドRを把持する各クランプ20がそれぞれ独立して開閉可能であるので、シリコンロッドRの太さが不均一であっても、各クランプ20で各部位を把持して搬出することができる。そして、カーボン電極30bを含むシリコンロッドR、含まないシリコンロッドR、および連結部30aをそれぞれ別の搬出台車40に集めて、搬出する。なお、各搬出台車40において、各シリコンロッドRおよび連結部30aは、ポリエチレン製袋に入れられ、外部からの汚染が防止されている。
【0035】
また、この多結晶シリコンロッド解体機10においては各クランプ20が独立して開閉可能であるので、シリコンロッドRを一つのクランプ20のみで把持するとともに他のクランプ20は開放状態として、割れの有無を確認する打音検査を行うことも可能である。
【0036】
さらに、逆U字状の多結晶シリコンロッド30を分割する際に一つのクランプ20のみでシリコンロッドRを把持することができ、シリコンロッドRの基端部を切断した後に二つのクランプ20で確実にシリコンロッドRを把持することができる。すなわち、同時に複数のクランプでシリコンロッドRを把持する場合には、シリコンロッドRの基端部を切断する際にはクランプによる把持ができないため、シリコンロッドRを支える作業者が必要である。これに対して、この多結晶シリコンロッド解体機10によれば、クランプ20で把持した状態でシリコンロッドRの基端部を切断することができるので、シリコンロッドRを支える作業者の減員が可能である。
【0037】
以上説明したように、この多結晶シリコンロッド解体機10によれば、1本のシリコンロッドRを2箇所で把持するので、安定してシリコンロッドRを搬出できる。また、各クランプ20がそれぞれ独立して開閉するので、径が均一ではないシリコンロッドRであっても、把持部分の太さに応じて適切な力で把持でき、シリコンロッドRを破損させることなく確実に搬出できる。
【0038】
また、クランプ20には、シリコンロッドRとの接触を感知するセンサ25が備えられているので、シリコンロッドRを把持する前にクランプ20の当接板21aと接触あるいは当たることにより倒してしまう事故を防止できる。
【0039】
なお、本発明は前記実施形態の構成のものに限定されるものではなく、細部構成においては、本発明の趣旨を逸脱しない範囲において種々の変更を加えることが可能である。たとえば、位置決め部は、前記実施形態では2枚の平板(当接板21a)で構成したが、シリコンロッドRを位置決めできる当接板を備えていればよく、シリコンロッドRの外周面より大きい円弧板などであってもよい。
【0040】
本発明の多結晶シリコンロッド解体機において、把持したシリコンロッドの打音検査を行う場合、打音時の周波数を確認して、シリコンロッドのクラックや割れの有無を判断してもよい。
【0041】
また、本発明の多結晶シリコンロッド解体機において、シリコンロッドを把持する際のクランプ位置は可変できるような機構(シリコンロッドをクランプした際の安定性を確保できるように各クランプ間の間隔を変えられるようにした構造)でもよい。
【0042】
また、本発明の多結晶シリコンロッド解体機において、クランプのシリコンロッドと接触する当接板、カバー板などには、シリコンの汚染防止のために、Si製、SiC製の板材もしくは、SiCコーティングを施した板材を用いてもよい。
【符号の説明】
【0043】
10 多結晶シリコンロッド解体機
11 ハンド部
12 回動部
12a 回動軸
13 バランサー部
13a アーム部
13b アーム支持部
13c 支柱
13d ベース部
14 操作部
14a 握り部
14b,14c 操作スイッチ部
20 クランプ
21 位置決め部
21a 当接板
22 ピボット軸
23 爪
25 センサ
26 カバー板
30 多結晶シリコンロッド
30a 連結部
40 搬出台車
41 作業台車
42 炉底
A 多結晶シリコンロッド解体装置
P1,P2 作業者
R,R1,R2 シリコンロッド
【特許請求の範囲】
【請求項1】
1本のシリコンロッドを把持する複数のクランプを備えるハンド部と、
前記ハンド部を回動自在に保持する回動部と、
前記回動部を助力移動可能に保持するバランサー部と、
を備え、
複数の前記クランプは、それぞれ独立して開閉可能であり、
立設状態のシリコンロッドを上下方向に並んだ複数の前記クランプで把持して、前記回動部により前記クランプが横方向に並ぶように前記ハンド部を回動させることにより、前記シリコンロッドを横置状態に移動させることを特徴とする多結晶シリコンロッド解体機。
【請求項2】
各前記クランプは、所定の角度をなして設けられそれぞれ前記シリコンロッドの外面が当接される2つの当接面を有する位置決め部と、この位置決め部を挟んで配置され各前記当接面に向けてそれぞれ前記シリコンロッドを押圧する一対の爪とを備えることを特徴とする請求項1記載の多結晶シリコンロッド解体機。
【請求項3】
前記位置決め部に、前記シリコンロッドの当接を感知するセンサが備えられていることを特徴とする請求項2記載の多結晶シリコンロッド解体機。
【請求項4】
請求項1から3のいずれかに記載の多結晶シリコンロッド解体機と、炉底の上方を水平移動可能な作業台車と、搬出台車とを有することを特徴とする多結晶シリコンロッド解体装置。
【請求項1】
1本のシリコンロッドを把持する複数のクランプを備えるハンド部と、
前記ハンド部を回動自在に保持する回動部と、
前記回動部を助力移動可能に保持するバランサー部と、
を備え、
複数の前記クランプは、それぞれ独立して開閉可能であり、
立設状態のシリコンロッドを上下方向に並んだ複数の前記クランプで把持して、前記回動部により前記クランプが横方向に並ぶように前記ハンド部を回動させることにより、前記シリコンロッドを横置状態に移動させることを特徴とする多結晶シリコンロッド解体機。
【請求項2】
各前記クランプは、所定の角度をなして設けられそれぞれ前記シリコンロッドの外面が当接される2つの当接面を有する位置決め部と、この位置決め部を挟んで配置され各前記当接面に向けてそれぞれ前記シリコンロッドを押圧する一対の爪とを備えることを特徴とする請求項1記載の多結晶シリコンロッド解体機。
【請求項3】
前記位置決め部に、前記シリコンロッドの当接を感知するセンサが備えられていることを特徴とする請求項2記載の多結晶シリコンロッド解体機。
【請求項4】
請求項1から3のいずれかに記載の多結晶シリコンロッド解体機と、炉底の上方を水平移動可能な作業台車と、搬出台車とを有することを特徴とする多結晶シリコンロッド解体装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2013−43734(P2013−43734A)
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2011−181623(P2011−181623)
【出願日】平成23年8月23日(2011.8.23)
【出願人】(000006264)三菱マテリアル株式会社 (4,417)
【Fターム(参考)】
【公開日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成23年8月23日(2011.8.23)
【出願人】(000006264)三菱マテリアル株式会社 (4,417)
【Fターム(参考)】
[ Back to top ]