
多結晶形状記憶合金のアコモデーション挙動を考慮した相変態挙動測定方法.
【課題】 形状記憶合金の変態ひずみはそれによる内部応力の発生を最小にするように生じる.これをアコモデーションというが,このアコモデーション挙動を考慮した変態ひずみの計算法を提供する.
【解決手段】 多結晶形状記憶合金を結晶方位の異なる結晶の並列結合で表すことによりアコモデーション挙動を記述し,計算の安定化のため,各結晶粒をさらに部分要素に分割する.結晶粒の変態ひずみは部分要素の変態ひずみの平均となり,これから結晶粒の弾性ひずみおよび応力を計算する.変態は各結晶粒の各変態面における分解せん断応力を計算し,その値の大きい順に生じるとする.変態が起きるごとに応力分布の再分布を計算することを特徴とする結晶形状記憶合金の相変態挙動測定方法.
【解決手段】 多結晶形状記憶合金を結晶方位の異なる結晶の並列結合で表すことによりアコモデーション挙動を記述し,計算の安定化のため,各結晶粒をさらに部分要素に分割する.結晶粒の変態ひずみは部分要素の変態ひずみの平均となり,これから結晶粒の弾性ひずみおよび応力を計算する.変態は各結晶粒の各変態面における分解せん断応力を計算し,その値の大きい順に生じるとする.変態が起きるごとに応力分布の再分布を計算することを特徴とする結晶形状記憶合金の相変態挙動測定方法.
【発明の詳細な説明】
【技術分野】
【0001】
本発明は,多結晶形状記憶合金のアコモデーション挙動を考慮した相変態挙動測定方法に関するものである.
【背景技術】
【0002】
形状記憶合金の相変態挙動を精密に予測するためには相変態挙動がアコモデーション機構のもとで生じることを正確に記述する必要がある.形状記憶合金の相変態を伴う応力・ひずみ挙動を予測する技術は下記のようにいくつか提案されているが,そのいずれもが相変態におけるアコモデーション挙動を正確に記述するものでなく,予測技術としては不完全なものである.
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】徳田ら,日本機械学会論文集,A,98‐1000 (1999),491-497.Panico, M., Brinson L. C., J Mechanics and Physics of Solids, 55 (2007), 2491-2511.
【発明の概要】
【発明が解決しようとする課題】
【0004】
多結晶形状記憶合金は結晶方位の異なる単結晶合金の集合体であり,それぞれの結晶粒は24通りの変態方位をもっている.例えばある結晶のある変態方位において変態が生じたとすると,生じた変態ひずみによって,その変態方位の変態に抵抗するような内部応力が形成され,次の変態は別の結晶粒の別の方位において生じる.このようなメカニズムが次々と働き,変態過程における多結晶体中の内部応力を最小にする.
【0005】
このメカニズムによる変態ひずみ生成過程をアコモデーションと呼び,アコモデーションを生じさせるメカニズムをアコモデーション機構と呼ぶ.本発明はこのメカニズムのもとで生じる変態ひずみの挙動,すなわち,変態ひずみのアコモデーション挙動を精密に計算することを可能にする技術に関するものである.
【課題を解決するための手段】
【0006】
本発明の特徴とする技術条件は次の通りである。
多結晶形状記憶合金を結晶方位の異なる結晶粒の並列結合により示し,各結晶粒をさらに部分要素に分割し.部分要素の変態ひずみの平均を結晶粒の変態ひずみとし,これから結晶粒の弾性ひずみおよび応力を求めると共に各結晶粒の各変態面における分解せん断応力を求め、その値の大きい順に変態は生じるとして変態が起きるごとに応力分布の再分布を計算して最大の分解せん断応力を発生する部分要素を求め,最大せん断応力が変態条件を満足する時、変態ひずみを当該部分要素に与えると共に変態ひずみの値を更新し、更新した変態ひずみの値を用いて弾性ひずみを更新しこの弾性ひずみを用いてミクロ応力の値を更新し、このミクロ応力を座標変換してマクロ座標でのマクロ応力に変換し、この応力を部分要素を含む材料構造にわたって平均し,これをマクロ応力とすることを特徴とする多結晶形状記憶合金のアコモデーション挙動を考慮した相変態挙動測定方法.
【発明の効果】
【0007】
外部ひずみ増分を与え,各結晶粒の応力を計算し,変態条件を満足する場合変態ひずみを計算し,変態ひずみの発生による応力の再分布を計算する.各結晶粒の応力の平均を微視材料全体の応力とする.こうすることにより変態を考慮した形状記憶合金の応力・ひずみ関係が求められる.また,温度増分を与え,それに伴う変態ひずみを計算することにより,温度変化の影響を考慮した応力・ひずみ関係が求められる.
【図面の簡単な説明】
【0008】
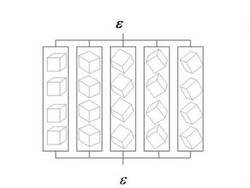
【図1】アコモデーション挙動を発現する材料のモデル図である.
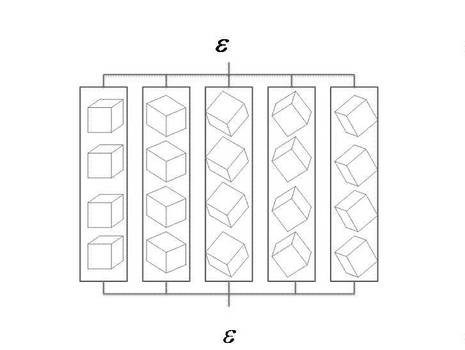
【図2】部分要素も書きこんだ材料のモデル図である.
【図3】計算の流れを示した図である.
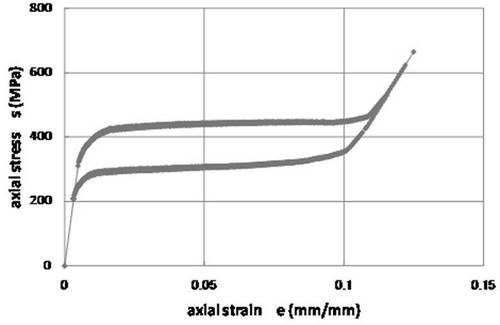
【図4】形状記憶合金の超弾性挙動の計算例である。
【発明を実施するための形態】
【0009】
以下に本発明の実施するための形態を説明する。
材料の応力とひずみの関係を構成式という.この構成式を導くときに用いられる材料の物理的なモデルを構成式モデルという.物理的なモデルは,材料のすべての挙動を精密に表現するものではないが,要求される材料応答を妥当に表現でき,かつその応答を定式化する場合に必要な簡略化されたモデルである必要がある.また,この物理的なモデルとその帰結である構成式を合わせたものも構成式モデルと呼ばれる.この発明は,形状記憶合金の変態挙動に対して,そのアコモデーション挙動を考慮した構成式モデルを与えるものである.以下では構成式モデルのことを単にモデルと呼ぶ.
【0010】
形状記憶合金の変態におけるアコモデーション挙動を記述するため,多結晶形状記憶合金を結晶方位の異なる結晶粒の集合体として表現する.それら集合体によって表現される材料の微視要素が巨視的材料中に埋め込まれるとする時,微視要素中のそれぞれの方位の結晶粒は周りの材料からの変位拘束により自由に変形できない.これを表現するため,それぞれの方位の結晶粒のひずみが,外部ひずみ(材料の微視要素に与えられるひずみ:結晶粒の集合体の外部から与えられるひずみ)と等しくなるモデルを考える.このモデルは,材料の微視要素を図1に模式的に示されるように方位の異なる結晶粒の並列結合で表していることになる.またこのモデルにおいては各結晶粒のひずみは外部ひずみに等しくなるので等ひずみモデルとも呼ばれる.
【0011】
このモデルにおいていずれかの結晶粒で変態が生じたとすると,その結晶粒においては変態ひずみが生じることにより,弾性ひずみが減少し,応力が減少することになる.したがって次の変態は,他の結晶粒で生じることになり,さらにすでに生じた変態ひずみの方向に対し,それを打ち消す方向の変態が生じることとなる.このようにして,変態ひずみのアコモデーション挙動が記述されることになる.
【0012】
一つの結晶粒のひずみを考える場合,結晶粒全体に一時に変態ひずみが生じるとすると,変態固有ひずみは10%程度とかなり大きいので,変態ひずみ発生に伴う応力変動の程度が大きすぎて計算モデルが不安定になる.
図2に示すように,一つの結晶粒をさらに細分化して結晶粒と同じ結晶方位をもつN個の部分要素に分け,それぞれの部分要素に対して異なる変態限界応力を与えることにより,変態ひずみが部分要素ごとに起こるとすることができる.このとき,結晶粒の変態ひずみは,N個の部分要素の変態ひずみの平均であり,一つの部分要素の変態によって生じる変態固有ひずみの1/Nが,一回の変態により生じる結晶粒の変態ひずみとなる.Nに対して大きな値を与えることにより,結晶粒における一回あたり生じる変態ひずみを小さくすることができ,計算の不安定化を防ぐことができる.
【0013】
結晶粒の変態ひずみはこれら部分要素の変態ひずみの平均となる.結晶粒の弾性ひずみは外部ひずみの値からこの平均変態ひずみを差し引くことによって求められ,これから結晶粒の応力が計算できる.
【0014】
部分要素の応力は,このように求められた結晶粒の応力に等しいとする.すなわち,結晶粒内では部分要素は直列結合で表される.これを図2に示す.
【0015】
1個の結晶粒には24通りの変態の方向が存在するので,上記のようにして求められた応力から,それぞれの変態面上に働く分解せん断応力を計算し,その最大値が限界値を超過する場合,変態が生じるとする.
【0016】
変態面上に働く垂直応力の作用も考慮することも可能である.変態駆動応力τDRは具体的にτDR=τ+ασで表される.
但し、τ:分解せん断応力, σ:変態面に働く垂直応力, α:材料定数
変態駆動応力の大小で変態ひずみの発生を評価する.
【0017】
変態の限界値は,それを越すと変態が起こる限界値と,すでに変態が起きてしまった要素において,それ以下になると変態が元に復する,すなわち,逆変態に対する限界値を設定することができる.また,その限界値を超すと変態の方向が変化する変態再配列の限界値を設定することができる.
【0018】
上記限界値を温度の関数として設定することにより,機械的負荷のみならず温度変化に対する形状記憶合金の変態挙動を記述することができる.
【0019】
微視材料要素の応力は各結晶粒の応力の平均となる.
【0020】
上記の一連の計算は,材料座標,結晶粒座標(部分要素座標),変態面座標における物理量の座標変換に注意しながら進める.
計算手続きを図3に示す.すなわち,
ステップ1: ひずみεの微小増分dεをあたえる.この時ひずみはε+dεとなる.
ステップ2: 各結晶粒中の部分要素のひずみを求める.一定ひずみの仮定により,この値はε+dεに等しい.ただし,このひずみは材料のマクロ座標で定義されているので,座標変換により,部分要素のミクロ座標でのひずみに変換しておく.部分要素の変態ひずみを差し引いて弾性ひずみを求める.
ステップ3: 弾性ひずみに弾性係数を乗じて部分要素の応力(ミクロ応力)を求める.部分要素には24通りの変態システムがあるので,そのそれぞれに対して変態面の方位を考慮した分解せん断応力を求める.
ステップ4: 最大の分解せん断応力を発生する部分要素を求め,最大せん断応力が変態条件を満足する場合は,変態ひずみをこの部分要素に与え,変態ひずみの値を更新する.更新された変態ひずみの値を用い弾性ひずみを更新する.これを用いてミクロ応力の値を更新する.
ステップ5: 座標変換によりミクロ座標での応力をマクロ座標での応力に変換する.この応力を図2に示す構造にわたって平均し,これをマクロ応力とする.このプロセスにより各増分段階においてマクロひずみを与えた時のマクロ応力が与えられる.初期値を与えて温度・負荷条件に沿った温度および負荷の増分計算を繰り返し行うことにより与えられた温度・負荷条件における応力・ひずみの履歴が計算できる.
【0021】
上記計算の具体例として,形状記憶合金の超弾性挙動の計算例を図4に示す.
図4は、形状記憶合金の超弾性挙動の計算例である.オーステナイト状態にある(Af点以上の温度領域)形状記憶合金に単軸引張り応力を負荷すると,応力の増加に伴いマルテンサイト変態が生じ,応力・ひずみ曲線の勾配が緩くなる.さらに変形が進みマルテンサイト変態が飽和するとマルテンサイトの弾性変形により,応力・ひずみ曲線が立ち上がる.次いで除荷過程においては,ある応力以下になるとオーステナイト逆変態が起こり,オーステナイト逆変態の飽和を経て,応力・ひずみの原点に復帰する.この一連の応力・ひずみ挙動が示されている.
【産業上の利用可能性】
【0022】
本発明はこの形状記憶合金の相変態を伴う応力・ひずみ挙動を正確に予測するため、当該相変態挙動をアコモデーション機構のもとで生じることを取り入れた測定方法で実現させたものである。
即ち、本発明の測定方法により、形状記憶合金の超弾性挙動の応力―ひずみ関係を計算すると、応力誘起によるマルテンサイト変態開始応力(ひずみ)とその変態終了応力(ひずみ)、及び除荷過程におけるマルテンサイト相からオーステナイト相に逆変態開始応力(ひずみ)とその逆変態終了応力(ひずみ)を明瞭にすることを可能ならしめたものであり、従来の変態及び逆変態の開始・終了応力(ひずみ)の考え方を一新するものである。しかも実験的に変態および逆変態の開始および終了を正確に求めることは不可能であり、学術的に及び産業的に意義の大きなものである。
【技術分野】
【0001】
本発明は,多結晶形状記憶合金のアコモデーション挙動を考慮した相変態挙動測定方法に関するものである.
【背景技術】
【0002】
形状記憶合金の相変態挙動を精密に予測するためには相変態挙動がアコモデーション機構のもとで生じることを正確に記述する必要がある.形状記憶合金の相変態を伴う応力・ひずみ挙動を予測する技術は下記のようにいくつか提案されているが,そのいずれもが相変態におけるアコモデーション挙動を正確に記述するものでなく,予測技術としては不完全なものである.
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】徳田ら,日本機械学会論文集,A,98‐1000 (1999),491-497.Panico, M., Brinson L. C., J Mechanics and Physics of Solids, 55 (2007), 2491-2511.
【発明の概要】
【発明が解決しようとする課題】
【0004】
多結晶形状記憶合金は結晶方位の異なる単結晶合金の集合体であり,それぞれの結晶粒は24通りの変態方位をもっている.例えばある結晶のある変態方位において変態が生じたとすると,生じた変態ひずみによって,その変態方位の変態に抵抗するような内部応力が形成され,次の変態は別の結晶粒の別の方位において生じる.このようなメカニズムが次々と働き,変態過程における多結晶体中の内部応力を最小にする.
【0005】
このメカニズムによる変態ひずみ生成過程をアコモデーションと呼び,アコモデーションを生じさせるメカニズムをアコモデーション機構と呼ぶ.本発明はこのメカニズムのもとで生じる変態ひずみの挙動,すなわち,変態ひずみのアコモデーション挙動を精密に計算することを可能にする技術に関するものである.
【課題を解決するための手段】
【0006】
本発明の特徴とする技術条件は次の通りである。
多結晶形状記憶合金を結晶方位の異なる結晶粒の並列結合により示し,各結晶粒をさらに部分要素に分割し.部分要素の変態ひずみの平均を結晶粒の変態ひずみとし,これから結晶粒の弾性ひずみおよび応力を求めると共に各結晶粒の各変態面における分解せん断応力を求め、その値の大きい順に変態は生じるとして変態が起きるごとに応力分布の再分布を計算して最大の分解せん断応力を発生する部分要素を求め,最大せん断応力が変態条件を満足する時、変態ひずみを当該部分要素に与えると共に変態ひずみの値を更新し、更新した変態ひずみの値を用いて弾性ひずみを更新しこの弾性ひずみを用いてミクロ応力の値を更新し、このミクロ応力を座標変換してマクロ座標でのマクロ応力に変換し、この応力を部分要素を含む材料構造にわたって平均し,これをマクロ応力とすることを特徴とする多結晶形状記憶合金のアコモデーション挙動を考慮した相変態挙動測定方法.
【発明の効果】
【0007】
外部ひずみ増分を与え,各結晶粒の応力を計算し,変態条件を満足する場合変態ひずみを計算し,変態ひずみの発生による応力の再分布を計算する.各結晶粒の応力の平均を微視材料全体の応力とする.こうすることにより変態を考慮した形状記憶合金の応力・ひずみ関係が求められる.また,温度増分を与え,それに伴う変態ひずみを計算することにより,温度変化の影響を考慮した応力・ひずみ関係が求められる.
【図面の簡単な説明】
【0008】
【図1】アコモデーション挙動を発現する材料のモデル図である.
【図2】部分要素も書きこんだ材料のモデル図である.
【図3】計算の流れを示した図である.
【図4】形状記憶合金の超弾性挙動の計算例である。
【発明を実施するための形態】
【0009】
以下に本発明の実施するための形態を説明する。
材料の応力とひずみの関係を構成式という.この構成式を導くときに用いられる材料の物理的なモデルを構成式モデルという.物理的なモデルは,材料のすべての挙動を精密に表現するものではないが,要求される材料応答を妥当に表現でき,かつその応答を定式化する場合に必要な簡略化されたモデルである必要がある.また,この物理的なモデルとその帰結である構成式を合わせたものも構成式モデルと呼ばれる.この発明は,形状記憶合金の変態挙動に対して,そのアコモデーション挙動を考慮した構成式モデルを与えるものである.以下では構成式モデルのことを単にモデルと呼ぶ.
【0010】
形状記憶合金の変態におけるアコモデーション挙動を記述するため,多結晶形状記憶合金を結晶方位の異なる結晶粒の集合体として表現する.それら集合体によって表現される材料の微視要素が巨視的材料中に埋め込まれるとする時,微視要素中のそれぞれの方位の結晶粒は周りの材料からの変位拘束により自由に変形できない.これを表現するため,それぞれの方位の結晶粒のひずみが,外部ひずみ(材料の微視要素に与えられるひずみ:結晶粒の集合体の外部から与えられるひずみ)と等しくなるモデルを考える.このモデルは,材料の微視要素を図1に模式的に示されるように方位の異なる結晶粒の並列結合で表していることになる.またこのモデルにおいては各結晶粒のひずみは外部ひずみに等しくなるので等ひずみモデルとも呼ばれる.
【0011】
このモデルにおいていずれかの結晶粒で変態が生じたとすると,その結晶粒においては変態ひずみが生じることにより,弾性ひずみが減少し,応力が減少することになる.したがって次の変態は,他の結晶粒で生じることになり,さらにすでに生じた変態ひずみの方向に対し,それを打ち消す方向の変態が生じることとなる.このようにして,変態ひずみのアコモデーション挙動が記述されることになる.
【0012】
一つの結晶粒のひずみを考える場合,結晶粒全体に一時に変態ひずみが生じるとすると,変態固有ひずみは10%程度とかなり大きいので,変態ひずみ発生に伴う応力変動の程度が大きすぎて計算モデルが不安定になる.
図2に示すように,一つの結晶粒をさらに細分化して結晶粒と同じ結晶方位をもつN個の部分要素に分け,それぞれの部分要素に対して異なる変態限界応力を与えることにより,変態ひずみが部分要素ごとに起こるとすることができる.このとき,結晶粒の変態ひずみは,N個の部分要素の変態ひずみの平均であり,一つの部分要素の変態によって生じる変態固有ひずみの1/Nが,一回の変態により生じる結晶粒の変態ひずみとなる.Nに対して大きな値を与えることにより,結晶粒における一回あたり生じる変態ひずみを小さくすることができ,計算の不安定化を防ぐことができる.
【0013】
結晶粒の変態ひずみはこれら部分要素の変態ひずみの平均となる.結晶粒の弾性ひずみは外部ひずみの値からこの平均変態ひずみを差し引くことによって求められ,これから結晶粒の応力が計算できる.
【0014】
部分要素の応力は,このように求められた結晶粒の応力に等しいとする.すなわち,結晶粒内では部分要素は直列結合で表される.これを図2に示す.
【0015】
1個の結晶粒には24通りの変態の方向が存在するので,上記のようにして求められた応力から,それぞれの変態面上に働く分解せん断応力を計算し,その最大値が限界値を超過する場合,変態が生じるとする.
【0016】
変態面上に働く垂直応力の作用も考慮することも可能である.変態駆動応力τDRは具体的にτDR=τ+ασで表される.
但し、τ:分解せん断応力, σ:変態面に働く垂直応力, α:材料定数
変態駆動応力の大小で変態ひずみの発生を評価する.
【0017】
変態の限界値は,それを越すと変態が起こる限界値と,すでに変態が起きてしまった要素において,それ以下になると変態が元に復する,すなわち,逆変態に対する限界値を設定することができる.また,その限界値を超すと変態の方向が変化する変態再配列の限界値を設定することができる.
【0018】
上記限界値を温度の関数として設定することにより,機械的負荷のみならず温度変化に対する形状記憶合金の変態挙動を記述することができる.
【0019】
微視材料要素の応力は各結晶粒の応力の平均となる.
【0020】
上記の一連の計算は,材料座標,結晶粒座標(部分要素座標),変態面座標における物理量の座標変換に注意しながら進める.
計算手続きを図3に示す.すなわち,
ステップ1: ひずみεの微小増分dεをあたえる.この時ひずみはε+dεとなる.
ステップ2: 各結晶粒中の部分要素のひずみを求める.一定ひずみの仮定により,この値はε+dεに等しい.ただし,このひずみは材料のマクロ座標で定義されているので,座標変換により,部分要素のミクロ座標でのひずみに変換しておく.部分要素の変態ひずみを差し引いて弾性ひずみを求める.
ステップ3: 弾性ひずみに弾性係数を乗じて部分要素の応力(ミクロ応力)を求める.部分要素には24通りの変態システムがあるので,そのそれぞれに対して変態面の方位を考慮した分解せん断応力を求める.
ステップ4: 最大の分解せん断応力を発生する部分要素を求め,最大せん断応力が変態条件を満足する場合は,変態ひずみをこの部分要素に与え,変態ひずみの値を更新する.更新された変態ひずみの値を用い弾性ひずみを更新する.これを用いてミクロ応力の値を更新する.
ステップ5: 座標変換によりミクロ座標での応力をマクロ座標での応力に変換する.この応力を図2に示す構造にわたって平均し,これをマクロ応力とする.このプロセスにより各増分段階においてマクロひずみを与えた時のマクロ応力が与えられる.初期値を与えて温度・負荷条件に沿った温度および負荷の増分計算を繰り返し行うことにより与えられた温度・負荷条件における応力・ひずみの履歴が計算できる.
【0021】
上記計算の具体例として,形状記憶合金の超弾性挙動の計算例を図4に示す.
図4は、形状記憶合金の超弾性挙動の計算例である.オーステナイト状態にある(Af点以上の温度領域)形状記憶合金に単軸引張り応力を負荷すると,応力の増加に伴いマルテンサイト変態が生じ,応力・ひずみ曲線の勾配が緩くなる.さらに変形が進みマルテンサイト変態が飽和するとマルテンサイトの弾性変形により,応力・ひずみ曲線が立ち上がる.次いで除荷過程においては,ある応力以下になるとオーステナイト逆変態が起こり,オーステナイト逆変態の飽和を経て,応力・ひずみの原点に復帰する.この一連の応力・ひずみ挙動が示されている.
【産業上の利用可能性】
【0022】
本発明はこの形状記憶合金の相変態を伴う応力・ひずみ挙動を正確に予測するため、当該相変態挙動をアコモデーション機構のもとで生じることを取り入れた測定方法で実現させたものである。
即ち、本発明の測定方法により、形状記憶合金の超弾性挙動の応力―ひずみ関係を計算すると、応力誘起によるマルテンサイト変態開始応力(ひずみ)とその変態終了応力(ひずみ)、及び除荷過程におけるマルテンサイト相からオーステナイト相に逆変態開始応力(ひずみ)とその逆変態終了応力(ひずみ)を明瞭にすることを可能ならしめたものであり、従来の変態及び逆変態の開始・終了応力(ひずみ)の考え方を一新するものである。しかも実験的に変態および逆変態の開始および終了を正確に求めることは不可能であり、学術的に及び産業的に意義の大きなものである。
【特許請求の範囲】
【請求項1】
多結晶形状記憶合金を結晶方位の異なる結晶粒の並列結合により示し,各結晶粒をさらに部分要素に分割し.部分要素の変態ひずみの平均を結晶粒の変態ひずみとし,これから結晶粒の弾性ひずみおよび応力を求めると共に各結晶粒の各変態面における分解せん断応力を求め、その値の大きい順に変態は生じるとして変態が起きるごとに応力分布の再分布を計算して最大の分解せん断応力を発生する部分要素を求め,最大せん断応力が変態条件を満足する時、変態ひずみを当該部分要素に与えると共に変態ひずみの値を更新し、更新した変態ひずみの値を用いて弾性ひずみを更新しこの弾性ひずみを用いてミクロ応力の値を更新し、このミクロ応力を座標変換してマクロ座標でのマクロ応力に変換し、この応力を部分要素を含む材料構造にわたって平均し,これをマクロ応力とすることを特徴とする多結晶形状記憶合金のアコモデーション挙動を考慮した相変態挙動測定方法.
【請求項1】
多結晶形状記憶合金を結晶方位の異なる結晶粒の並列結合により示し,各結晶粒をさらに部分要素に分割し.部分要素の変態ひずみの平均を結晶粒の変態ひずみとし,これから結晶粒の弾性ひずみおよび応力を求めると共に各結晶粒の各変態面における分解せん断応力を求め、その値の大きい順に変態は生じるとして変態が起きるごとに応力分布の再分布を計算して最大の分解せん断応力を発生する部分要素を求め,最大せん断応力が変態条件を満足する時、変態ひずみを当該部分要素に与えると共に変態ひずみの値を更新し、更新した変態ひずみの値を用いて弾性ひずみを更新しこの弾性ひずみを用いてミクロ応力の値を更新し、このミクロ応力を座標変換してマクロ座標でのマクロ応力に変換し、この応力を部分要素を含む材料構造にわたって平均し,これをマクロ応力とすることを特徴とする多結晶形状記憶合金のアコモデーション挙動を考慮した相変態挙動測定方法.
【図1】



【図2】
【図3】

【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−98064(P2012−98064A)
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願番号】特願2010−243841(P2010−243841)
【出願日】平成22年10月29日(2010.10.29)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 平成22年6月30日 日本MRS発行の「Transactions of the Materials Research Society of Japan Vol.35 no.2 June 2010」に発表
【出願人】(304028726)国立大学法人 大分大学 (181)
【Fターム(参考)】
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願日】平成22年10月29日(2010.10.29)
【新規性喪失の例外の表示】特許法第30条第1項適用申請有り 平成22年6月30日 日本MRS発行の「Transactions of the Materials Research Society of Japan Vol.35 no.2 June 2010」に発表
【出願人】(304028726)国立大学法人 大分大学 (181)
【Fターム(参考)】
[ Back to top ]