
多結晶材料の変形特性予測方法及び装置、並びにプログラム及び記録媒体
【課題】後方散乱電子線回折(EBSD)法により得られた塑性変形を受けていない多結晶材料の結晶情報を用いて、多結晶材料が巨視的変形を受けた際の微視組織の不均一変形状態を、簡易な方法で迅速且つ確実に予測し、多結晶材料の塑性変形時の機械特性を正確に得る。
【解決手段】多結晶材料からなる試料について、後方散乱電子線回折法によって得られた各測定点の結晶情報を用いた多結晶材料の変形特性を予測する際に、各測定点の結晶情報を入力するステップと、入力された各測定点の結晶情報を用いて、各測定点と1対1に対応するように要素分割し、離散化モデルを作成するステップと、離散化モデルを用いて、所定の境界条件の下に変形解析を行うステップとを実行する。
【解決手段】多結晶材料からなる試料について、後方散乱電子線回折法によって得られた各測定点の結晶情報を用いた多結晶材料の変形特性を予測する際に、各測定点の結晶情報を入力するステップと、入力された各測定点の結晶情報を用いて、各測定点と1対1に対応するように要素分割し、離散化モデルを作成するステップと、離散化モデルを用いて、所定の境界条件の下に変形解析を行うステップとを実行する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、鉄鋼やアルミニウム、マグネシウム等の多結晶材料の変形特性を予測する方法及び装置、並びにプログラム及び記録媒体に関する。
【背景技術】
【0002】
通常、いわゆる構造用材料として用いられる鉄鋼やアルミニウム、マグネシウム等の金属材料は、結晶粒と呼ばれるいくつかの成分結晶で構成されている多結晶体である。
一方、材料の引張り強度、降伏応力、伸び、加工硬化率、異方性等の巨視的な機械特性は、微視的な結晶構造、即ち個々の結晶相、結晶粒の大きさ、形状、結晶方位、分布形態に影響される。そのため、例えば光学顕微鏡、X線回折法、走査電子顕微鏡を用いた後方散乱電子線回折(EBSD)法等を用いて、上述した微視的な結晶構造を直接、間接的に測定し、巨視的な機械特性との関連を調べることが行われている。
【0003】
具体的に、特許文献1では、EBSD法等による結晶方位の測定から結晶組織を再構築する技術が開示されている。
特許文献2では、被測定結晶粒の試料表面における変形前後の画像を取得して、試料表面におけるすべり線角度及び結晶方位を求め、粒界の縦横寸法、面積、すべり線角度及び結晶方位から所定の計算式により、三次元の歪みテンソルと塑性スピンを算出する技術が開示されている。
特許文献3では、塑性変形が生じている試料の各結晶粒における複数の測定箇所の結晶方位のずれを測定して基準点とその周囲の点の2次元的な方位の変化を求め、塑性変形、疲労損傷、クリープ損傷、クリープ疲労のいずれの変形モードであるかを特定する技術が開示されている。
非特許文献1では、多結晶構造を結晶粒毎に離散化(メッシュ分割)し、有限要素法による変形解析を行う技術が報告されている。
【0004】
【特許文献1】特開2003−121394号公報
【特許文献2】特開2004−317482号公報
【特許文献3】特開平9−325125号公報
【非特許文献1】松井ら:応用力学論文集 Vol. 5, pp. 175-183 (2002)
【非特許文献2】EBSD読本 (株)TSLソリューションズ著
【非特許文献3】マトリックス有限要素法 O.C.ツィエンキーヴィッツ著 培風館
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の技術では、多結晶材料について、微視組織観察に基づき直接的に巨視的な変形特性を予測することができない。
具体的に、上記した特許文献1の手法では、結晶粒の幾何形状、空間分布、方位分布等の情報は得られるものの、塑性変形による変化、即ち多結晶材料の巨視的な機械特性と直接的に対応付けることができない。
特許文献2の手法では、巨視的には比較的小さな変形量における微視的な結晶粒毎の不均一変形を測定できるが、やはり多結晶材料の巨視的な変形特性と直接的に対応付けることができない。また、多結晶材料の破壊等の大きな変形下における挙動まで追跡するためには、局所的な結晶粒の変形が非常に大きくなり、変形前後の対応付け(マッピング)が困難となる。更に、結晶組織の観察には、試料準備から測定まで長時間を要し、変形の複数段階で測定するには多大なコスト及び時間を要する。
【0006】
また、特許文献3の手法は、多結晶材料の塑性変形後の微視組織から変形モードを特定する事後評価方法であるため、多結晶材料の変形前の初期組織から、その機械特性を予測することはできない。
非特許文献1の手法では、適切なモデル化を行えば、多結晶材料の変形挙動を予測することができるが、複雑な多結晶組織を離散化(メッシュ分割)することは、非常に手間がかかり、また予測結果は正確性に欠ける懸念がある。
【0007】
本発明は、塑性変形を受けていない多結晶材料の結晶情報を用いて、多結晶材料が巨視的変形を受けた際の微視組織の不均一変形状態を、簡易な方法で迅速且つ確実に予測し、多結晶材料の塑性変形時の機械特性を正確に得ることができる多結晶材料の変形特性予測方法及び装置、並びにプログラム及び記録媒体を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の変形特性予測方法は、多結晶材料からなる試料について得られた各測定点の結晶情報を用いた多結晶材料の変形特性予測方法であって、前記各測定点の前記結晶情報を入力するステップと、入力された前記各測定点の前記結晶情報を用いて、前記各測定点と1対1に対応するように要素分割し、離散化モデルを作成するステップと、前記離散化モデルを用いて、所定の境界条件の下に変形解析を行うステップとを含む。
【0009】
本発明の変形特性予測装置は、多結晶材料からなる試料について得られた各測定点の結晶情報を用いた多結晶材料の変形特性予測装置であって、前記各測定点の前記結晶情報を用いて、前記各測定点と1対1に対応するように要素分割し、離散化モデルを作成する手段と、前記離散化モデルを用いて、所定の境界条件の下に変形解析を行う手段とを含む。
【0010】
本発明のプログラムは、多結晶材料からなる試料について得られた各測定点の結晶情報を用いた多結晶材料の変形特性予測方法を行うに際して、前記各測定点の前記結晶情報を入力するステップと、入力された前記各測定点の前記結晶情報を用いて、前記各測定点と1対1に対応するように要素分割し、離散化モデルを作成するステップと、前記離散化モデルを用いて、所定の境界条件の下に変形解析を行うステップとをコンピュータに実行させるものである。
【発明の効果】
【0011】
本発明によれば、塑性変形を受けていない多結晶材料の結晶情報を用いて、多結晶材料が巨視的変形を受けた際の微視組織の不均一変形状態を、簡易な方法で迅速且つ確実に予測し、多結晶材料の塑性変形時の機械特性を正確に得ることができる。
【発明を実施するための最良の形態】
【0012】
本発明では、EBSD法等により、多結晶材料からなる試料の各測定点(ピクセル)ごとの結晶情報が得られることを、離散化モデルを作成する際の例えば有限要素の作成に利用する。即ち、EBSD法等から得られたピクセルごとの結晶情報を用いて、応力―歪み関係式(構成モデル)のパラメータ(材料パラメータ)を設定し、各ピクセルと1対1に対応するように要素分割を行って離散化モデルを作成する。そして、得られた離散化モデルを用いて所定の境界条件の下に試料の変形解析を行う。
【0013】
以下、本発明を適用した具体的な実施形態について、図面を参照しながら詳細に説明する。
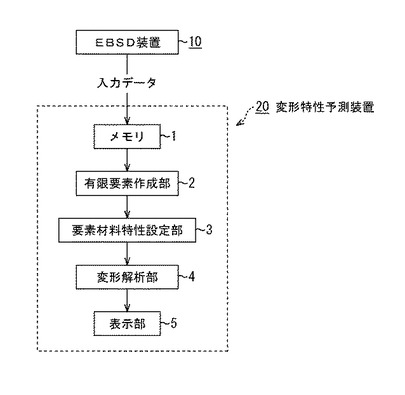
図1は、本実施形態による変形特性予測装置の概略構成を示すブロック図である。
変形特性予測装置20は、塑性変形を受けていない多結晶材料からなる試料について、EBSD法によって得られた各ピクセルの結晶情報を用いた多結晶材料の変形特性を予測するものである。
【0014】
変形特性予測装置20は、EBSD装置10からの入力データを格納するメモリ1と、有限要素法における有限要素メッシュ(要素)を作成する有限要素作成部2と、各要素の材料特性を設定する要素材料特性設定部3と、有限要素法により変形解析を行う変形解析部4と、変形解析を行った結果として得られる状態量を画像として表示する表示部5とを備えて構成されている。
ここで、有限要素作成部2、要素材料特性設定部3及び変形解析部4は、例えばコンピュータの中央処理装置(CPU)の各機能として実現される。
【0015】
以下、変形特性予測装置20の諸機能と共に、変形特性予測方法について説明する。
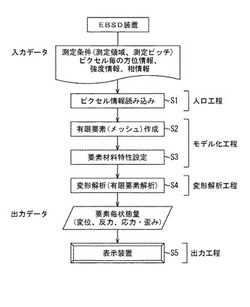
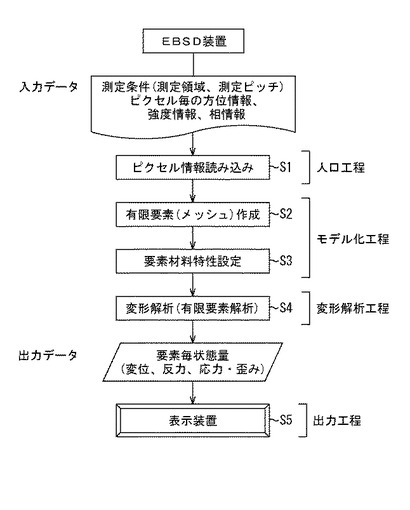
図2は、本実施形態による変形特性予測方法をステップ順に示すフロー図である。
本実施形態では、変多結晶材料からなる試料の形特性予測を行うに先立って、EBSD装置10を用いて試料を解析して結晶情報を得る。
【0016】
EBSD装置は、走査電子顕微鏡(SEM)を備えており、EBSD法により試料を解析する。
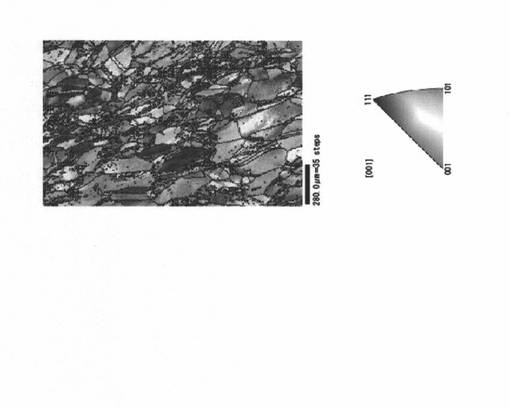
EBSD装置で得られる方位マッピング像の一例を図3に示す。ここでは、各ピクセルの方位を逆極点図のカラーキーに従って色付けしているが、図示の例では濃度差として表示されている。通常では、EBSD法で得られる結晶情報、具体的にはXY座標値、イメージクオリティ(IQ)値、信頼性指数(CI値)、フィット値、相情報等の一次情報の分布を元に、特性値化、例えば結晶方位分布、平均粒径、結晶相の体積分率等を計算し、試料の特性値として評価している(非特許文献2を参照)。
【0017】
本実施形態では、EBSD装置10により多結晶材料からなる試料を解析する。解析結果を示す数値ファイルは、例えば図4のように結晶情報が表示される。ここでは、結晶情報として、各ピクセルごとに項目(1)〜(10)の数値が示される。詳細には、各項目は、(1)〜(3)結晶方向(例えばオイラー角)、(4)〜(5)XY座標値、(6)イメージクオリティ(IQ)値、(7)信頼性指数(CI値)、(8)フィット値、(9)〜(11)相情報である。
【0018】
本実施形態では先ず、入力工程として、各ピクセルの結晶情報を入力する。
詳細には、変形特性予測装置20は、ピクセル数等の基本情報と共に、ピクセルごとの項目(1)〜(10)の結晶情報の数値を入力情報として順次読み込み、メモリ1に格納する(ステップS1)。
【0019】
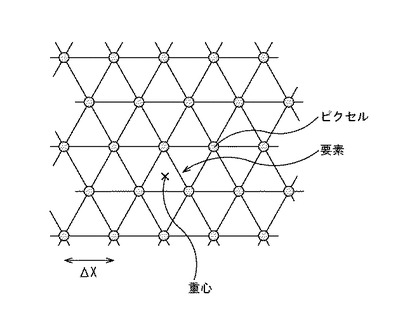
続いて、モデル化工程として、ピクセルごとの結晶情報を用いて、各ピクセルと1対1に対応するように要素分割し、離散化モデルを作成する。
詳細には、有限要素作成部2は、メモリ1に格納された各ピクセルのXY座標を節点座標として用い、例えば図5に示すように、要素を構成する節点番号リスト(図5では、3角形要素を構成する3節点の番号)を作成する。節点番号リストと節点のXY座標から、要素ごとに歪み―変位関係マトリックスが作成される(ステップS2)。ここで、各ピクセルが等間隔の規則的周期に配列されている場合には、例えば図5の例であれば、要素は全て合同な正三角形となり、有限要素メッシュの作成負荷は著しく軽減される。
【0020】
次に、要素材料特性設定部3は、要素を構成する各節点に対応するピクセルの結晶情報を元に、当該要素の材料特性、即ち、応力―歪み関係式(構成モデル)のパラメータ(材料パラメータ)を設定する(ステップS3)。
具体的には、要素を構成する各節点に対応するピクセルの結晶情報から、当該要素の結晶方位及び結晶相を、例えば平均化等を行うことにより決定し、予め得られている結晶相毎の応力―歪み関係マトリックスとの対応付けを行って、離散化モデルを作成する。
【0021】
続いて、変形解析工程として、離散化モデルを用いて、所定の境界条件の下に試料の変形解析を行う。
詳細には、変形解析部4は、要素ごとの歪み−変位関係マトリックス及び応力―歪み関係マトリックスが決定されれば、例えば非特許文献3に示される通常の有限要素法の手順に従い、要素剛性マトリックスの作成、全体剛性マトリックスの組み立て、境界条件の処理、連立方程式の求解を経て、各節点の変位及び反力と、各要素の歪み及び応力とを計算する(ステップS4)。
ここで、例えば、各結晶相の弾性変形のみを考える場合には、応力―歪み関係マトリックス及び要素剛性マトリックスでは結晶相の数のみを計算すれば良く、有限要素解析の負荷は著しく軽減される。
【0022】
続いて、出力工程として、変形解析を行った結果として得られる状態量を表示する。
詳細には、表示部5は、計算された状態量、ここでは各節点の変位、反力、及び各要素の歪み、応力から、目的に応じて様々な情報を表示する。表示形式としては、ここでは表示部5は画像表示装置として例示するが、画像表示に代え、或いは画像表示と共に、例えば各データをテーブル状に表示するようにしても良い。
【0023】
例えば、境界辺の節点変位と反力の関係から、巨視的な応力―歪み関係を予測することができる。また例えば、変位や応力の分布を表示することにより、破壊の起点になると予想される微視組織の部位を予め特定することができる。
上記した各工程は全て自動的に処理することが可能であり、ユーザが走査電子顕微鏡で微視組織を観察しながら、その場で試料の変形特性を予測することが可能である。
【0024】
以上説明したように、本実施形態によれば、EBSD法等により得られた塑性変形を受けていない多結晶材料の結晶情報を用いて、多結晶材料が巨視的変形を受けた際の微視組織の不均一変形状態を、簡易な方法で迅速且つ確実に予測し、多結晶材料の塑性変形時の機械特性を正確に得ることができる。
【0025】
なお、本実施形態では、多結晶材料である試料について、EBSD法等により得られた結晶情報を利用する場合について説明したが、本発明はこれに限定されるものではない。例えば、EBSD法を行う代わりに、光学顕微鏡や電子顕微鏡の画像をビットマップ形式で取り込むようにしても良い。この場合、例えば、得られた各測定点の色や濃淡等のビット情報を結晶情報として利用して、各測定点ごとのビット情報と有限要素メッシュとを対応させて、上記のような離散化モデルを作成する。
【0026】
(本発明を適用した他の実施形態)
上述した本実施形態による変形特性予測装置を構成する各構成要素(メモリ1及び表示手段5を除く)等の機能は、コンピュータのRAMやROM等に記憶されたプログラムが動作することによって実現できる。同様に、変形特性予測方法の各ステップ(図2のステップS1〜S5等)は、コンピュータのRAMやROM等に記憶されたプログラムが動作することによって実現できる。このプログラム及び当該プログラムを記録したコンピュータ読み取り可能な記憶媒体は本発明に含まれる。
【0027】
具体的に、前記プログラムは、例えばCD−ROMのような記録媒体に記録し、或いは各種伝送媒体を介し、コンピュータに提供される。前記プログラムを記録する記録媒体としては、CD−ROM以外に、フレキシブルディスク、ハードディスク、磁気テープ、光磁気ディスク、不揮発性メモリカード等を用いることができる。他方、前記プログラムの伝送媒体としては、プログラム情報を搬送波として伝搬させて供給するためのコンピュータネットワークシステムにおける通信媒体を用いることができる。ここで、コンピュータネットワークとは、LAN、インターネットの等のWAN、無線通信ネットワーク等であり、通信媒体とは、光ファイバ等の有線回線や無線回線等である。
【0028】
また、本発明に含まれるプログラムとしては、供給されたプログラムをコンピュータが実行することにより上述の実施形態の機能が実現されるようなもののみではない。例えば、そのプログラムがコンピュータにおいて稼働しているOS(オペレーティングシステム)或いは他のアプリケーションソフト等と共同して上述の実施形態の機能が実現される場合にも、かかるプログラムは本発明に含まれる。また、供給されたプログラムの処理の全て或いは一部がコンピュータの機能拡張ボードや機能拡張ユニットにより行われて上述の実施形態の機能が実現される場合にも、かかるプログラムは本発明に含まれる。
【0029】
例えば、図6は、パーソナルユーザ端末装置の内部構成を示す模式図である。この図6において、1200はCPU1201を備えたパーソナルコンピュータ(PC)である。PC1200は、ROM1202またはハードディスク(HD)1211に記憶された、又はフレキシブルディスクドライブ(FD)1212より供給されるデバイス制御ソフトウェアを実行する。このPC1200は、システムバス1204に接続される各デバイスを総括的に制御する。
【0030】
PC1200のCPU1201、ROM1202またはハードディスク(HD)1211に記憶されたプログラムにより、本実施形態の図2におけるステップS1〜S5の手順等が実現される。
【0031】
1203はRAMであり、CPU1201の主メモリ、ワークエリア等として機能する。1205はキーボードコントローラ(KBC)であり、キーボード(KB)1209や不図示のデバイス等からの指示入力を制御する。
【0032】
1206はCRTコントローラ(CRTC)であり、CRTディスプレイ(CRT)1210の表示を制御する。1207はディスクコントローラ(DKC)である。DKC1207は、ブートプログラム、複数のアプリケーション、編集ファイル、ユーザファイルそしてネットワーク管理プログラム等を記憶するハードディスク(HD)1211、及びフレキシブルディスク(FD)1212とのアクセスを制御する。ここで、ブートプログラムとは、起動プログラム:パソコンのハードやソフトの実行(動作)を開始するプログラムである。
【0033】
1208はネットワーク・インターフェースカード(NIC)で、LAN1220を介して、ネットワークプリンタ、他のネットワーク機器、或いは他のPCと双方向のデータのやり取りを行う。
【実施例】
【0034】
上述した実施形態に基づき、試料として炭素鋼を選択した変形特性の解析例について説明する。
図7は、試料である炭素鋼の2次電子像の写真を示す図である。
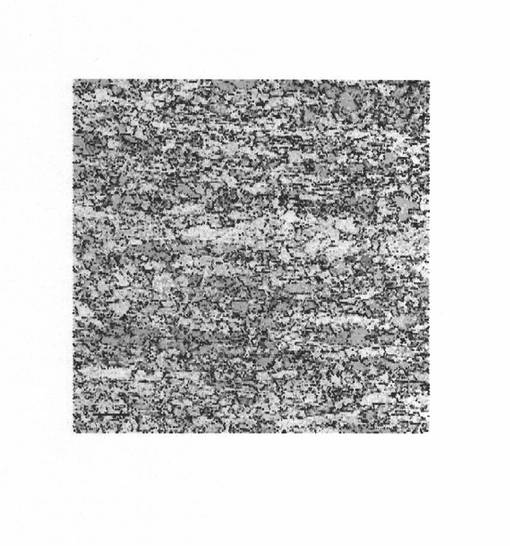
この試料は、硬質な第2相を有する複合組織材料であり、EBSD法により、結晶相をマッピングした結果を図8に示す。従来の手法では、マッピング結果から第2相の体積分率や、各相の平均粒径等の統計量を計算し、材料の特性値として利用していた。
【0035】
本実施例では、図5において、測定ピッチ0.5μmの最密格子で測定し、測定範囲は100μm×100μm(201ピクセル×232ピクセル)である。従って、全要素が合同な正三角形となり、変位―歪み関係マトリックスは、全ての要素共通となる。
また、各相の塑性変形における、相当応力(σ[MPa])―相当塑性歪み(εep[-])関係式は、別途実施した実験により、以下のように設定した。
【0036】
第1相(軟質相):σ=400+100{1−exp(−10εep)}
第2相(硬質相):σ=600+150{1−exp(−10εep)}
【0037】
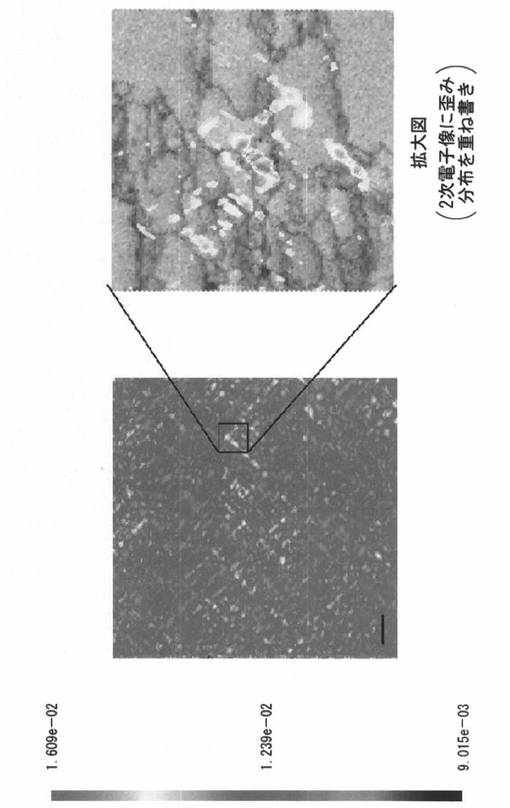
また、弾性域においては、等方弾性体として、弾性率E=206[GPa]、ポアソン比ν=0.3である。以上のモデル化を行った後、紙面上下方向に、巨視的歪み1%の単軸引張り変形を付与する有限要素解析を行った結果の一例を図9に示す。図9は、相当塑性歪みの分布であり、硬質相の周辺に歪みが集中する様子を示している。例えば、この表示で歪みが集中する部位を、更に高倍率で測定することにより、破壊の起点となる微視組織を詳細に解析することも可能である。
また、図9の相当塑性歪みの分布に対応した相当応力歪み一例を図10に示す。
【0038】
更に、本実施例において、上記と同様にして得られた、変位と反力との関係を図11に示す。図11では、横軸のNomal srtain(変位(相対値))では端部変位/長さ(100μm)を、縦軸のStress(反力)では端部反力の合計/断面積(100μm2)をそれぞれ示している。
【0039】
なお、本実施例では、硬質な第2相を有する2相組織の加工硬化特性をモデル化することにより、不均一変形が発生し歪みが集中する特定部位を同定する場合を例示したが、本発明は、この形態に限定されるものではない。例えば、任意の変形特性を個々のピクセルに適切に割り当てることにより、種々の多結晶材料の変形特性を、その場で予測することが可能である。
【図面の簡単な説明】
【0040】
【図1】本実施形態による変形特性予測装置の概略構成を示すブロック図である。
【図2】本実施形態による変形特性予測方法をステップ順に示すフロー図である。
【図3】EBSD法で得られる方位マッピング像の一例を示す図である。
【図4】EBSD法で得られる数値ファイルの一例を示す図である。
【図5】有限要素法による有限要素メッシュの一例を示す模式図である。
【図6】パーソナルユーザ端末装置の内部構成を示す模式図である。
【図7】試料である炭素鋼の2次電子像の写真を示す図である。
【図8】本実施例において、EBSD法により結晶相をマッピングした結果を示す図である。
【図9】本実施例において、有限要素解析を行った結果の一例を示す図である。
【図10】相当塑性歪みの分布に対応した相当応力歪み一例を示す図である。
【図11】本実施例における変位と反力との関係を示す特性図である。
【符号の説明】
【0041】
1 メモリ
2 有限要素作成部
3 要素材料特性設定部
4 変形解析部
5 表示部
10 EBSD装置
20 変形特性予測装置
【技術分野】
【0001】
本発明は、鉄鋼やアルミニウム、マグネシウム等の多結晶材料の変形特性を予測する方法及び装置、並びにプログラム及び記録媒体に関する。
【背景技術】
【0002】
通常、いわゆる構造用材料として用いられる鉄鋼やアルミニウム、マグネシウム等の金属材料は、結晶粒と呼ばれるいくつかの成分結晶で構成されている多結晶体である。
一方、材料の引張り強度、降伏応力、伸び、加工硬化率、異方性等の巨視的な機械特性は、微視的な結晶構造、即ち個々の結晶相、結晶粒の大きさ、形状、結晶方位、分布形態に影響される。そのため、例えば光学顕微鏡、X線回折法、走査電子顕微鏡を用いた後方散乱電子線回折(EBSD)法等を用いて、上述した微視的な結晶構造を直接、間接的に測定し、巨視的な機械特性との関連を調べることが行われている。
【0003】
具体的に、特許文献1では、EBSD法等による結晶方位の測定から結晶組織を再構築する技術が開示されている。
特許文献2では、被測定結晶粒の試料表面における変形前後の画像を取得して、試料表面におけるすべり線角度及び結晶方位を求め、粒界の縦横寸法、面積、すべり線角度及び結晶方位から所定の計算式により、三次元の歪みテンソルと塑性スピンを算出する技術が開示されている。
特許文献3では、塑性変形が生じている試料の各結晶粒における複数の測定箇所の結晶方位のずれを測定して基準点とその周囲の点の2次元的な方位の変化を求め、塑性変形、疲労損傷、クリープ損傷、クリープ疲労のいずれの変形モードであるかを特定する技術が開示されている。
非特許文献1では、多結晶構造を結晶粒毎に離散化(メッシュ分割)し、有限要素法による変形解析を行う技術が報告されている。
【0004】
【特許文献1】特開2003−121394号公報
【特許文献2】特開2004−317482号公報
【特許文献3】特開平9−325125号公報
【非特許文献1】松井ら:応用力学論文集 Vol. 5, pp. 175-183 (2002)
【非特許文献2】EBSD読本 (株)TSLソリューションズ著
【非特許文献3】マトリックス有限要素法 O.C.ツィエンキーヴィッツ著 培風館
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の技術では、多結晶材料について、微視組織観察に基づき直接的に巨視的な変形特性を予測することができない。
具体的に、上記した特許文献1の手法では、結晶粒の幾何形状、空間分布、方位分布等の情報は得られるものの、塑性変形による変化、即ち多結晶材料の巨視的な機械特性と直接的に対応付けることができない。
特許文献2の手法では、巨視的には比較的小さな変形量における微視的な結晶粒毎の不均一変形を測定できるが、やはり多結晶材料の巨視的な変形特性と直接的に対応付けることができない。また、多結晶材料の破壊等の大きな変形下における挙動まで追跡するためには、局所的な結晶粒の変形が非常に大きくなり、変形前後の対応付け(マッピング)が困難となる。更に、結晶組織の観察には、試料準備から測定まで長時間を要し、変形の複数段階で測定するには多大なコスト及び時間を要する。
【0006】
また、特許文献3の手法は、多結晶材料の塑性変形後の微視組織から変形モードを特定する事後評価方法であるため、多結晶材料の変形前の初期組織から、その機械特性を予測することはできない。
非特許文献1の手法では、適切なモデル化を行えば、多結晶材料の変形挙動を予測することができるが、複雑な多結晶組織を離散化(メッシュ分割)することは、非常に手間がかかり、また予測結果は正確性に欠ける懸念がある。
【0007】
本発明は、塑性変形を受けていない多結晶材料の結晶情報を用いて、多結晶材料が巨視的変形を受けた際の微視組織の不均一変形状態を、簡易な方法で迅速且つ確実に予測し、多結晶材料の塑性変形時の機械特性を正確に得ることができる多結晶材料の変形特性予測方法及び装置、並びにプログラム及び記録媒体を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明の変形特性予測方法は、多結晶材料からなる試料について得られた各測定点の結晶情報を用いた多結晶材料の変形特性予測方法であって、前記各測定点の前記結晶情報を入力するステップと、入力された前記各測定点の前記結晶情報を用いて、前記各測定点と1対1に対応するように要素分割し、離散化モデルを作成するステップと、前記離散化モデルを用いて、所定の境界条件の下に変形解析を行うステップとを含む。
【0009】
本発明の変形特性予測装置は、多結晶材料からなる試料について得られた各測定点の結晶情報を用いた多結晶材料の変形特性予測装置であって、前記各測定点の前記結晶情報を用いて、前記各測定点と1対1に対応するように要素分割し、離散化モデルを作成する手段と、前記離散化モデルを用いて、所定の境界条件の下に変形解析を行う手段とを含む。
【0010】
本発明のプログラムは、多結晶材料からなる試料について得られた各測定点の結晶情報を用いた多結晶材料の変形特性予測方法を行うに際して、前記各測定点の前記結晶情報を入力するステップと、入力された前記各測定点の前記結晶情報を用いて、前記各測定点と1対1に対応するように要素分割し、離散化モデルを作成するステップと、前記離散化モデルを用いて、所定の境界条件の下に変形解析を行うステップとをコンピュータに実行させるものである。
【発明の効果】
【0011】
本発明によれば、塑性変形を受けていない多結晶材料の結晶情報を用いて、多結晶材料が巨視的変形を受けた際の微視組織の不均一変形状態を、簡易な方法で迅速且つ確実に予測し、多結晶材料の塑性変形時の機械特性を正確に得ることができる。
【発明を実施するための最良の形態】
【0012】
本発明では、EBSD法等により、多結晶材料からなる試料の各測定点(ピクセル)ごとの結晶情報が得られることを、離散化モデルを作成する際の例えば有限要素の作成に利用する。即ち、EBSD法等から得られたピクセルごとの結晶情報を用いて、応力―歪み関係式(構成モデル)のパラメータ(材料パラメータ)を設定し、各ピクセルと1対1に対応するように要素分割を行って離散化モデルを作成する。そして、得られた離散化モデルを用いて所定の境界条件の下に試料の変形解析を行う。
【0013】
以下、本発明を適用した具体的な実施形態について、図面を参照しながら詳細に説明する。
図1は、本実施形態による変形特性予測装置の概略構成を示すブロック図である。
変形特性予測装置20は、塑性変形を受けていない多結晶材料からなる試料について、EBSD法によって得られた各ピクセルの結晶情報を用いた多結晶材料の変形特性を予測するものである。
【0014】
変形特性予測装置20は、EBSD装置10からの入力データを格納するメモリ1と、有限要素法における有限要素メッシュ(要素)を作成する有限要素作成部2と、各要素の材料特性を設定する要素材料特性設定部3と、有限要素法により変形解析を行う変形解析部4と、変形解析を行った結果として得られる状態量を画像として表示する表示部5とを備えて構成されている。
ここで、有限要素作成部2、要素材料特性設定部3及び変形解析部4は、例えばコンピュータの中央処理装置(CPU)の各機能として実現される。
【0015】
以下、変形特性予測装置20の諸機能と共に、変形特性予測方法について説明する。
図2は、本実施形態による変形特性予測方法をステップ順に示すフロー図である。
本実施形態では、変多結晶材料からなる試料の形特性予測を行うに先立って、EBSD装置10を用いて試料を解析して結晶情報を得る。
【0016】
EBSD装置は、走査電子顕微鏡(SEM)を備えており、EBSD法により試料を解析する。
EBSD装置で得られる方位マッピング像の一例を図3に示す。ここでは、各ピクセルの方位を逆極点図のカラーキーに従って色付けしているが、図示の例では濃度差として表示されている。通常では、EBSD法で得られる結晶情報、具体的にはXY座標値、イメージクオリティ(IQ)値、信頼性指数(CI値)、フィット値、相情報等の一次情報の分布を元に、特性値化、例えば結晶方位分布、平均粒径、結晶相の体積分率等を計算し、試料の特性値として評価している(非特許文献2を参照)。
【0017】
本実施形態では、EBSD装置10により多結晶材料からなる試料を解析する。解析結果を示す数値ファイルは、例えば図4のように結晶情報が表示される。ここでは、結晶情報として、各ピクセルごとに項目(1)〜(10)の数値が示される。詳細には、各項目は、(1)〜(3)結晶方向(例えばオイラー角)、(4)〜(5)XY座標値、(6)イメージクオリティ(IQ)値、(7)信頼性指数(CI値)、(8)フィット値、(9)〜(11)相情報である。
【0018】
本実施形態では先ず、入力工程として、各ピクセルの結晶情報を入力する。
詳細には、変形特性予測装置20は、ピクセル数等の基本情報と共に、ピクセルごとの項目(1)〜(10)の結晶情報の数値を入力情報として順次読み込み、メモリ1に格納する(ステップS1)。
【0019】
続いて、モデル化工程として、ピクセルごとの結晶情報を用いて、各ピクセルと1対1に対応するように要素分割し、離散化モデルを作成する。
詳細には、有限要素作成部2は、メモリ1に格納された各ピクセルのXY座標を節点座標として用い、例えば図5に示すように、要素を構成する節点番号リスト(図5では、3角形要素を構成する3節点の番号)を作成する。節点番号リストと節点のXY座標から、要素ごとに歪み―変位関係マトリックスが作成される(ステップS2)。ここで、各ピクセルが等間隔の規則的周期に配列されている場合には、例えば図5の例であれば、要素は全て合同な正三角形となり、有限要素メッシュの作成負荷は著しく軽減される。
【0020】
次に、要素材料特性設定部3は、要素を構成する各節点に対応するピクセルの結晶情報を元に、当該要素の材料特性、即ち、応力―歪み関係式(構成モデル)のパラメータ(材料パラメータ)を設定する(ステップS3)。
具体的には、要素を構成する各節点に対応するピクセルの結晶情報から、当該要素の結晶方位及び結晶相を、例えば平均化等を行うことにより決定し、予め得られている結晶相毎の応力―歪み関係マトリックスとの対応付けを行って、離散化モデルを作成する。
【0021】
続いて、変形解析工程として、離散化モデルを用いて、所定の境界条件の下に試料の変形解析を行う。
詳細には、変形解析部4は、要素ごとの歪み−変位関係マトリックス及び応力―歪み関係マトリックスが決定されれば、例えば非特許文献3に示される通常の有限要素法の手順に従い、要素剛性マトリックスの作成、全体剛性マトリックスの組み立て、境界条件の処理、連立方程式の求解を経て、各節点の変位及び反力と、各要素の歪み及び応力とを計算する(ステップS4)。
ここで、例えば、各結晶相の弾性変形のみを考える場合には、応力―歪み関係マトリックス及び要素剛性マトリックスでは結晶相の数のみを計算すれば良く、有限要素解析の負荷は著しく軽減される。
【0022】
続いて、出力工程として、変形解析を行った結果として得られる状態量を表示する。
詳細には、表示部5は、計算された状態量、ここでは各節点の変位、反力、及び各要素の歪み、応力から、目的に応じて様々な情報を表示する。表示形式としては、ここでは表示部5は画像表示装置として例示するが、画像表示に代え、或いは画像表示と共に、例えば各データをテーブル状に表示するようにしても良い。
【0023】
例えば、境界辺の節点変位と反力の関係から、巨視的な応力―歪み関係を予測することができる。また例えば、変位や応力の分布を表示することにより、破壊の起点になると予想される微視組織の部位を予め特定することができる。
上記した各工程は全て自動的に処理することが可能であり、ユーザが走査電子顕微鏡で微視組織を観察しながら、その場で試料の変形特性を予測することが可能である。
【0024】
以上説明したように、本実施形態によれば、EBSD法等により得られた塑性変形を受けていない多結晶材料の結晶情報を用いて、多結晶材料が巨視的変形を受けた際の微視組織の不均一変形状態を、簡易な方法で迅速且つ確実に予測し、多結晶材料の塑性変形時の機械特性を正確に得ることができる。
【0025】
なお、本実施形態では、多結晶材料である試料について、EBSD法等により得られた結晶情報を利用する場合について説明したが、本発明はこれに限定されるものではない。例えば、EBSD法を行う代わりに、光学顕微鏡や電子顕微鏡の画像をビットマップ形式で取り込むようにしても良い。この場合、例えば、得られた各測定点の色や濃淡等のビット情報を結晶情報として利用して、各測定点ごとのビット情報と有限要素メッシュとを対応させて、上記のような離散化モデルを作成する。
【0026】
(本発明を適用した他の実施形態)
上述した本実施形態による変形特性予測装置を構成する各構成要素(メモリ1及び表示手段5を除く)等の機能は、コンピュータのRAMやROM等に記憶されたプログラムが動作することによって実現できる。同様に、変形特性予測方法の各ステップ(図2のステップS1〜S5等)は、コンピュータのRAMやROM等に記憶されたプログラムが動作することによって実現できる。このプログラム及び当該プログラムを記録したコンピュータ読み取り可能な記憶媒体は本発明に含まれる。
【0027】
具体的に、前記プログラムは、例えばCD−ROMのような記録媒体に記録し、或いは各種伝送媒体を介し、コンピュータに提供される。前記プログラムを記録する記録媒体としては、CD−ROM以外に、フレキシブルディスク、ハードディスク、磁気テープ、光磁気ディスク、不揮発性メモリカード等を用いることができる。他方、前記プログラムの伝送媒体としては、プログラム情報を搬送波として伝搬させて供給するためのコンピュータネットワークシステムにおける通信媒体を用いることができる。ここで、コンピュータネットワークとは、LAN、インターネットの等のWAN、無線通信ネットワーク等であり、通信媒体とは、光ファイバ等の有線回線や無線回線等である。
【0028】
また、本発明に含まれるプログラムとしては、供給されたプログラムをコンピュータが実行することにより上述の実施形態の機能が実現されるようなもののみではない。例えば、そのプログラムがコンピュータにおいて稼働しているOS(オペレーティングシステム)或いは他のアプリケーションソフト等と共同して上述の実施形態の機能が実現される場合にも、かかるプログラムは本発明に含まれる。また、供給されたプログラムの処理の全て或いは一部がコンピュータの機能拡張ボードや機能拡張ユニットにより行われて上述の実施形態の機能が実現される場合にも、かかるプログラムは本発明に含まれる。
【0029】
例えば、図6は、パーソナルユーザ端末装置の内部構成を示す模式図である。この図6において、1200はCPU1201を備えたパーソナルコンピュータ(PC)である。PC1200は、ROM1202またはハードディスク(HD)1211に記憶された、又はフレキシブルディスクドライブ(FD)1212より供給されるデバイス制御ソフトウェアを実行する。このPC1200は、システムバス1204に接続される各デバイスを総括的に制御する。
【0030】
PC1200のCPU1201、ROM1202またはハードディスク(HD)1211に記憶されたプログラムにより、本実施形態の図2におけるステップS1〜S5の手順等が実現される。
【0031】
1203はRAMであり、CPU1201の主メモリ、ワークエリア等として機能する。1205はキーボードコントローラ(KBC)であり、キーボード(KB)1209や不図示のデバイス等からの指示入力を制御する。
【0032】
1206はCRTコントローラ(CRTC)であり、CRTディスプレイ(CRT)1210の表示を制御する。1207はディスクコントローラ(DKC)である。DKC1207は、ブートプログラム、複数のアプリケーション、編集ファイル、ユーザファイルそしてネットワーク管理プログラム等を記憶するハードディスク(HD)1211、及びフレキシブルディスク(FD)1212とのアクセスを制御する。ここで、ブートプログラムとは、起動プログラム:パソコンのハードやソフトの実行(動作)を開始するプログラムである。
【0033】
1208はネットワーク・インターフェースカード(NIC)で、LAN1220を介して、ネットワークプリンタ、他のネットワーク機器、或いは他のPCと双方向のデータのやり取りを行う。
【実施例】
【0034】
上述した実施形態に基づき、試料として炭素鋼を選択した変形特性の解析例について説明する。
図7は、試料である炭素鋼の2次電子像の写真を示す図である。
この試料は、硬質な第2相を有する複合組織材料であり、EBSD法により、結晶相をマッピングした結果を図8に示す。従来の手法では、マッピング結果から第2相の体積分率や、各相の平均粒径等の統計量を計算し、材料の特性値として利用していた。
【0035】
本実施例では、図5において、測定ピッチ0.5μmの最密格子で測定し、測定範囲は100μm×100μm(201ピクセル×232ピクセル)である。従って、全要素が合同な正三角形となり、変位―歪み関係マトリックスは、全ての要素共通となる。
また、各相の塑性変形における、相当応力(σ[MPa])―相当塑性歪み(εep[-])関係式は、別途実施した実験により、以下のように設定した。
【0036】
第1相(軟質相):σ=400+100{1−exp(−10εep)}
第2相(硬質相):σ=600+150{1−exp(−10εep)}
【0037】
また、弾性域においては、等方弾性体として、弾性率E=206[GPa]、ポアソン比ν=0.3である。以上のモデル化を行った後、紙面上下方向に、巨視的歪み1%の単軸引張り変形を付与する有限要素解析を行った結果の一例を図9に示す。図9は、相当塑性歪みの分布であり、硬質相の周辺に歪みが集中する様子を示している。例えば、この表示で歪みが集中する部位を、更に高倍率で測定することにより、破壊の起点となる微視組織を詳細に解析することも可能である。
また、図9の相当塑性歪みの分布に対応した相当応力歪み一例を図10に示す。
【0038】
更に、本実施例において、上記と同様にして得られた、変位と反力との関係を図11に示す。図11では、横軸のNomal srtain(変位(相対値))では端部変位/長さ(100μm)を、縦軸のStress(反力)では端部反力の合計/断面積(100μm2)をそれぞれ示している。
【0039】
なお、本実施例では、硬質な第2相を有する2相組織の加工硬化特性をモデル化することにより、不均一変形が発生し歪みが集中する特定部位を同定する場合を例示したが、本発明は、この形態に限定されるものではない。例えば、任意の変形特性を個々のピクセルに適切に割り当てることにより、種々の多結晶材料の変形特性を、その場で予測することが可能である。
【図面の簡単な説明】
【0040】
【図1】本実施形態による変形特性予測装置の概略構成を示すブロック図である。
【図2】本実施形態による変形特性予測方法をステップ順に示すフロー図である。
【図3】EBSD法で得られる方位マッピング像の一例を示す図である。
【図4】EBSD法で得られる数値ファイルの一例を示す図である。
【図5】有限要素法による有限要素メッシュの一例を示す模式図である。
【図6】パーソナルユーザ端末装置の内部構成を示す模式図である。
【図7】試料である炭素鋼の2次電子像の写真を示す図である。
【図8】本実施例において、EBSD法により結晶相をマッピングした結果を示す図である。
【図9】本実施例において、有限要素解析を行った結果の一例を示す図である。
【図10】相当塑性歪みの分布に対応した相当応力歪み一例を示す図である。
【図11】本実施例における変位と反力との関係を示す特性図である。
【符号の説明】
【0041】
1 メモリ
2 有限要素作成部
3 要素材料特性設定部
4 変形解析部
5 表示部
10 EBSD装置
20 変形特性予測装置
【特許請求の範囲】
【請求項1】
多結晶材料からなる試料について得られた各測定点の結晶情報を用いた多結晶材料の変形特性予測方法であって、
前記各測定点の前記結晶情報を入力するステップと、
入力された前記各測定点の前記結晶情報を用いて、前記各測定点と1対1に対応するように要素分割し、離散化モデルを作成するステップと、
前記離散化モデルを用いて、所定の境界条件の下に変形解析を行うステップと
を含むことを特徴とする多結晶材料の変形特性予測方法。
【請求項2】
前記試料について、後方散乱電子線回折法によって得られた前記各測定点の前記結晶情報を用いることを特徴とする請求項1に記載の多結晶材料の変形特性予測方法。
【請求項3】
前記変形解析を行った結果として得られる状態量を表示するステップを更に含むことを特徴とする請求項1又は2に記載の多結晶材料の変形特性予測方法。
【請求項4】
前記各測定点が、それぞれ等間隔の規則的周期を有することを特徴とする請求項1〜3のいずれか1項に記載の多結晶材料の変形特性予測方法。
【請求項5】
前記変形解析が有限要素解析法により行われることを特徴とする請求項1〜4のいずれか1項に記載の多結晶材料の変形特性予測方法。
【請求項6】
多結晶材料からなる試料について得られた各測定点の結晶情報を用いた多結晶材料の変形特性予測装置であって、
前記各測定点の前記結晶情報を用いて、前記各測定点と1対1に対応するように要素分割し、離散化モデルを作成する手段と、
前記離散化モデルを用いて、所定の境界条件の下に変形解析を行う手段と
を含むことを特徴とする多結晶材料の変形特性予測装置。
【請求項7】
前記試料について、後方散乱電子線回折法によって得られた前記各測定点の前記結晶情報を用いることを特徴とする請求項6に記載の多結晶材料の変形特性予測装置。
【請求項8】
前記変形解析を行った結果として得られる状態量を表示する手段を更に含むことを特徴とする請求項6又は7に記載の多結晶材料の変形特性予測装置。
【請求項9】
前記各測定点が、それぞれ等間隔の規則的周期を有することを特徴とする請求項6〜8のいずれか1項に記載の多結晶材料の変形特性予測装置。
【請求項10】
前記変形解析が有限要素解析法により行われることを特徴とする請求項6〜9のいずれか1項に記載の多結晶材料の変形特性予測装置。
【請求項11】
多結晶材料からなる試料について得られた各測定点の結晶情報を用いた多結晶材料の変形特性予測方法を行うに際して、
前記各測定点の前記結晶情報を入力するステップと、
入力された前記各測定点の前記結晶情報を用いて、前記各測定点と1対1に対応するように要素分割し、離散化モデルを作成するステップと、
前記離散化モデルを用いて、所定の境界条件の下に変形解析を行うステップと
をコンピュータに実行させるプログラム。
【請求項12】
前記試料について、後方散乱電子線回折法によって得られた前記各測定点の前記結晶情報を用いることを特徴とする請求項11に記載のプログラム。
【請求項13】
前記変形解析を行った結果として得られる状態量を表示するステップを更にコンピュータに実行させる請求項11又は12に記載のプログラム。
【請求項14】
前記各測定点が、それぞれ等間隔の規則的周期を有することを特徴とする請求項11〜13のいずれか1項に記載のプログラム。
【請求項15】
前記変形解析が有限要素解析法により行われることを特徴とする請求項11〜14のいずれか1項に記載のプログラム。
【請求項16】
請求項11〜15のいずれか1項に記載のプログラムを記録したコンピュータ読み取り可能な記録媒体。
【請求項1】
多結晶材料からなる試料について得られた各測定点の結晶情報を用いた多結晶材料の変形特性予測方法であって、
前記各測定点の前記結晶情報を入力するステップと、
入力された前記各測定点の前記結晶情報を用いて、前記各測定点と1対1に対応するように要素分割し、離散化モデルを作成するステップと、
前記離散化モデルを用いて、所定の境界条件の下に変形解析を行うステップと
を含むことを特徴とする多結晶材料の変形特性予測方法。
【請求項2】
前記試料について、後方散乱電子線回折法によって得られた前記各測定点の前記結晶情報を用いることを特徴とする請求項1に記載の多結晶材料の変形特性予測方法。
【請求項3】
前記変形解析を行った結果として得られる状態量を表示するステップを更に含むことを特徴とする請求項1又は2に記載の多結晶材料の変形特性予測方法。
【請求項4】
前記各測定点が、それぞれ等間隔の規則的周期を有することを特徴とする請求項1〜3のいずれか1項に記載の多結晶材料の変形特性予測方法。
【請求項5】
前記変形解析が有限要素解析法により行われることを特徴とする請求項1〜4のいずれか1項に記載の多結晶材料の変形特性予測方法。
【請求項6】
多結晶材料からなる試料について得られた各測定点の結晶情報を用いた多結晶材料の変形特性予測装置であって、
前記各測定点の前記結晶情報を用いて、前記各測定点と1対1に対応するように要素分割し、離散化モデルを作成する手段と、
前記離散化モデルを用いて、所定の境界条件の下に変形解析を行う手段と
を含むことを特徴とする多結晶材料の変形特性予測装置。
【請求項7】
前記試料について、後方散乱電子線回折法によって得られた前記各測定点の前記結晶情報を用いることを特徴とする請求項6に記載の多結晶材料の変形特性予測装置。
【請求項8】
前記変形解析を行った結果として得られる状態量を表示する手段を更に含むことを特徴とする請求項6又は7に記載の多結晶材料の変形特性予測装置。
【請求項9】
前記各測定点が、それぞれ等間隔の規則的周期を有することを特徴とする請求項6〜8のいずれか1項に記載の多結晶材料の変形特性予測装置。
【請求項10】
前記変形解析が有限要素解析法により行われることを特徴とする請求項6〜9のいずれか1項に記載の多結晶材料の変形特性予測装置。
【請求項11】
多結晶材料からなる試料について得られた各測定点の結晶情報を用いた多結晶材料の変形特性予測方法を行うに際して、
前記各測定点の前記結晶情報を入力するステップと、
入力された前記各測定点の前記結晶情報を用いて、前記各測定点と1対1に対応するように要素分割し、離散化モデルを作成するステップと、
前記離散化モデルを用いて、所定の境界条件の下に変形解析を行うステップと
をコンピュータに実行させるプログラム。
【請求項12】
前記試料について、後方散乱電子線回折法によって得られた前記各測定点の前記結晶情報を用いることを特徴とする請求項11に記載のプログラム。
【請求項13】
前記変形解析を行った結果として得られる状態量を表示するステップを更にコンピュータに実行させる請求項11又は12に記載のプログラム。
【請求項14】
前記各測定点が、それぞれ等間隔の規則的周期を有することを特徴とする請求項11〜13のいずれか1項に記載のプログラム。
【請求項15】
前記変形解析が有限要素解析法により行われることを特徴とする請求項11〜14のいずれか1項に記載のプログラム。
【請求項16】
請求項11〜15のいずれか1項に記載のプログラムを記録したコンピュータ読み取り可能な記録媒体。
【図1】


【図2】
【図4】

【図5】
【図6】

【図11】

【図3】
【図7】
【図8】

【図9】
【図10】

【図2】
【図4】
【図5】
【図6】
【図11】
【図3】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2009−264797(P2009−264797A)
【公開日】平成21年11月12日(2009.11.12)
【国際特許分類】
【出願番号】特願2008−111811(P2008−111811)
【出願日】平成20年4月22日(2008.4.22)
【出願人】(000006655)新日本製鐵株式会社 (6,474)
【Fターム(参考)】
【公開日】平成21年11月12日(2009.11.12)
【国際特許分類】
【出願日】平成20年4月22日(2008.4.22)
【出願人】(000006655)新日本製鐵株式会社 (6,474)
【Fターム(参考)】
[ Back to top ]