
多脚歩行式移動装置の足部機構
【課題】不整地においても、支持多角形の面積を確保することができると共に、立位バランス制御に必要かつ十分な床反力情報を取得することができる、シンプルな構成の多脚歩行式移動装置の足部機構を提供する。
【解決手段】多脚歩行式移動装置における脚ユニットの下端に取り付けられて接地する足部機構1であって、脚ユニットの先端に取り付けられるベース部材2と、ベース部材2に固定されていて、一直線上に並ばない3つの接地点31e,32e,33eを有すると共に、当該接地点のみで接地するようになっている支持部材31,32,33と、支持部材31,32,33に設けられ、接地点31e,32e,33eにおける床反力をそれぞれ検出する床反力検出装置31c,32c,33cであって、接地点31e,32e,33e全てを含んでなる第1の仮想足底平面P1の法線方向に作用する床反力のみを検出するものと、からなる足部機構1とした。
【解決手段】多脚歩行式移動装置における脚ユニットの下端に取り付けられて接地する足部機構1であって、脚ユニットの先端に取り付けられるベース部材2と、ベース部材2に固定されていて、一直線上に並ばない3つの接地点31e,32e,33eを有すると共に、当該接地点のみで接地するようになっている支持部材31,32,33と、支持部材31,32,33に設けられ、接地点31e,32e,33eにおける床反力をそれぞれ検出する床反力検出装置31c,32c,33cであって、接地点31e,32e,33e全てを含んでなる第1の仮想足底平面P1の法線方向に作用する床反力のみを検出するものと、からなる足部機構1とした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、床反力制御によって立位バランスを保持する多脚歩行式移動装置の脚ユニットに取り付けられて接地する、足部機構に関するものである。
【背景技術】
【0002】
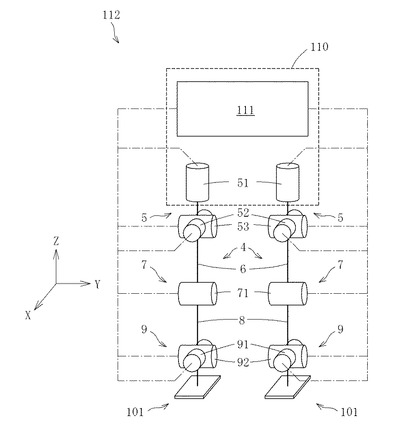
従来の多脚歩行式移動装置、例えば二脚歩行式ロボットは一般に、図6に示す如く、上体ユニット110と、上体ユニット110の下部に取り付けられた脚ユニット4,4とを有している。脚ユニット4は、股関節部5と、大腿リンク6を介して股関節部5に連結された膝関節部7と、下腿リンク8を介して膝関節部7に連結された足首関節部9と、足首関節部9に連結された足部機構101とにより、構成されている。
【0003】
股関節部5は、Z軸まわりの揺動軸51と、X軸まわりの揺動軸52と、Y軸まわりの揺動軸53とにより構成されている。膝関節部7は、Y軸まわりの揺動軸71からなっている。足首関節部9は、X軸まわりの揺動軸91と、Y軸まわりの揺動軸92とにより、構成されている。つまり、脚ユニット4は6自由度を有している。
なお、ここでのX軸方向、Y軸方向およびZ軸方向とは、二脚歩行式ロボット112の前後方向(前方+)、横方向(右方+)、上下方向(上方+)を指す(以下同じ)。
【0004】
各揺動軸51〜53,71,91,92は、それぞれの軸周りに回転する駆動モータにより構成されている。各駆動モータは、上体ユニット110内に格納された制御ユニット111によって駆動制御される。
【0005】
制御ユニット111は、外部からの要求動作に対応して歩容データを生成する歩容生成部(不図示)と、この歩容データに基づいて各関節部5,7,9の駆動モータを駆動制御する歩行制御部(不図示)と、を備えている。
【0006】
歩容生成部は、各関節部5,7,9における駆動モータの目標角度、目標角速度等を含む歩容データを生成する。歩行制御部は、その歩容データに従って各関節部5,7,9の駆動モータを駆動制御することにより、所定の歩行パターンで脚ユニット4を揺動させる。これにより、二脚歩行式ロボット112は、二脚歩行を実現している。
【0007】
上記のような二脚歩行式ロボットの立位バランス保持に関し、ZMP規範が適用され得る。ここで、「ZMP(Zero Moment Point)」とは、ロボットの足底が受ける床反力の圧力中心であり、足底が平面である場合には足底が床面から受けるモーメント(の水平成分)がゼロになる点のことである。ZMP規範とは、このZMPが、3点以上の接地点を線で結ぶことで形成される支持多角形の内側にあれば、ロボットは転倒せずに安定に歩行し得るとする規範である。
【0008】
このZMP規範に基づき、歩行中における実際のZMP(以下、実ZMPと称する)を、所定の歩行パターンにおける目標ZMPに一致させるように、ロボットの状態を制御することにより、多脚歩行式移動装置の立位バランスを保持することができる。
【0009】
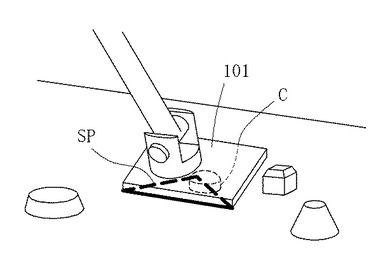
ところで、従来の多脚歩行式ロボットの足部機構は、その足底が単一平面で構成されていることが多い。足底が単一平面であると、図9(非特許文献1の図2を引用)に示す如く、不整地歩行の際、凸部Cに乗り上げる等、足底全体が接地しない場合がある。この場合、支持多角形SPの面積が小さくなり、立位バランスを保持することが困難となっていた。
【0010】
この問題に対し、例えば、非特許文献1記載の足部機構が提案されている。
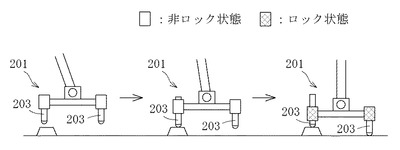
非特許文献1記載の足部機構201は、図10(非特許文献1の図3を引用)に示す如く、足部機構201の4隅に受動的に上下動する支持部材203を有していて、路面の凹凸にならうようになっている。各支持部材203には、それぞれ接地を感知するスイッチ(不図示)が設けられている。スイッチが4つの支持部材203全ての接地を感知すると、各支持部材203がロックされる。これにより、速やかに支持多角形が構成され、保持される。
【0011】
また、特許文献1記載の足部機構が提案されている。
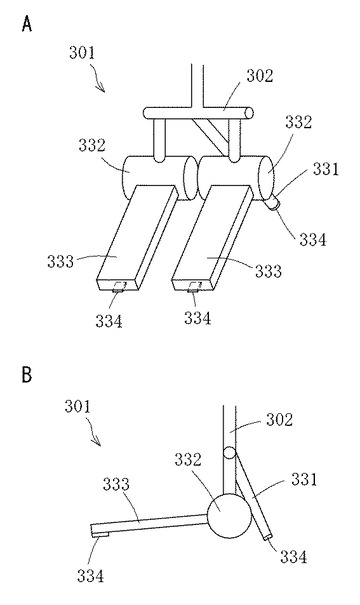
特許文献1記載の足部機構301は主に、図11(特許文献1の図2を引用)に示す如く、ベース部302と、ベース部302の後端付近に固定配置された踵部331と、ベース部302の下端に設けられた関節部(駆動モータ)332,332と、関節部332,332から実質的に前方に向かって並んで延び、ベース部302に対して上下に揺動可能に配置された一対の足先部333,333と、から構成されている。踵部331および足先部333,333の先端の下面には、床反力情報を得るための3軸力センサ334が設けられている。各3軸力センサ334からの検出値に基づき、関節部332,332が適宜駆動制御されることにより、不整地においても、踵部331と足先部333,333とで常に3点接地するようになっている。
【非特許文献1】橋本健二,菅原雄介,林昭宏,川瀬正幹,太田章博,田中智明,遠藤信綱,沢戸瑛昌,林憲玉,高西淳夫:2足歩行ロボットの不正地適応能力向上を図った足部機構の開発(第3報:新保持機構開発による不整地歩行の実現),第24回日本ロボット学会学術講演会講演論文集,2F15, 2006.
【特許文献1】特開2004−90194号公報
【発明の開示】
【発明が解決しようとする課題】
【0012】
しかしながら、非特許文献1記載の足部機構は、支持部材を上下動させるための機構や支持部材をロックする機構、接地を感知するスイッチ等を設ける必要があり、複雑な構成となっていた。
【0013】
また、特許文献1記載の足部機構は、足先部が揺動するため、複雑な構成であった。特許文献1記載の足部機構はさらに、立位バランス制御に十分な床反力情報を得るためには、3つの3軸力センサが必要であった。一般に、多軸力センサは高価かつ壊れ易いため、不整地を歩行する大型の多脚歩行式移動装置にこの足部機構を適用することは困難であった。
【0014】
本発明は上記事情に鑑みてなされたものであり、その目的とするところは、不整地歩行においても、支持多角形の面積を確保することができると共に、立位バランス制御に必要かつ十分な床反力情報を取得することができる、シンプルな構成の多脚歩行式移動装置の足部機構を提供することにある。
【課題を解決するための手段】
【0015】
上記課題を解決するために本発明は、(1) 多脚歩行式移動装置における脚ユニットの下端に取り付けられて接地する足部機構であって、前記脚ユニットの下端に取り付けられるベース部材と、前記ベース部材に固定されていて、一直線上に並ばない3つの接地点を有すると共に、当該接地点のみで接地するようになっている支持部材と、前記支持部材に設けられ、前記接地点における床反力をそれぞれ検出する床反力検出装置であって、前記接地点全てを含んでなる第1の仮想足底平面の法線方向に作用する床反力のみを検出するものと、を備えてなることを特徴とする多脚歩行式移動装置の足部機構を提供するものである。
ここで、「足」とは人間でいう足首からつま先までに対応する部分を指し、「脚」とは人間でいう足首から骨盤までに対応する部分を指す(以下、同じ)。
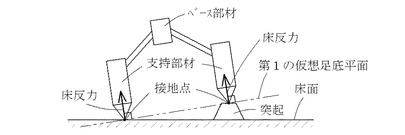
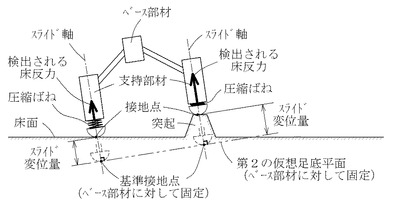
また、「第1の仮想足底平面」とは、足部機構における3本の支持部材の先端(接地点)全てを含む(通る)平面を指す(以下、同じ)。つまり、「第1の仮想足底平面」は、例えば不整地等において支持部材の先端が突起上に乗り上げたとき、図7に示す如く、実際の床面とは一致しないこととなる。なお、図7は、2次元的に表現する都合上、足部機構の支持部材を2本としている。
また、「前記接地点全てを含んでなる第1の仮想足底平面の法線方向に作用する床反力」は、例えば不整地等において支持部材の先端が突起上に乗り上げたときのものを図示すると、図7のようになる。
【0016】
また、本発明は、(2) 多脚歩行式移動装置における脚ユニットの下端に取り付けられて接地する足部機構であって、前記脚ユニットの下端に取り付けられるベース部材と、前記ベース部材に固定された支持部材であって、前記ベース部材に対して固定された一直線上に並ばない3つの基準接地点と、当該基準接地点全てを含んでなる第2の仮想足底平面の法線方向に沿って当該基準接地点を通る軸上をスライド可能であると共に、前記基準接地点近傍にそれぞれ接地点を有する3つのスライド片と、を備えていて、前記接地点のみで接地するようになっているものと、前記支持部材に設けられ、前記スライド片を、そのスライドの方向であって前記接地点における床反力に逆らう方向に付勢する付勢手段と、前記支持部材に設けられ、前記接地点における床反力をそれぞれ検出する床反力検出装置であって、前記スライド片のスライド変位量を検出する検出器を備え、当該検出器によって検出した前記スライド変位量から、前記第2の仮想足底平面の法線方向に作用する床反力のみを算出するものと、を備えてなることを特徴とする多脚歩行式移動装置の足部機構を提供するものである。
ここで、「基準接地点」とは、実際の接地点近傍にそれぞれ定義されるベース部材に対して固定された点であって、実際の接地点とは必ずしも一致しないが、実ZMP算出上、接地点と同等に取り扱っても問題ない点を指す。
【発明の効果】
【0017】
本発明の多脚歩行式移動装置の足部機構は、足底が平面や曲面ではなく、支持部材の先端3点のみで接地する構成となっている。したがって、本発明の足部機構によれば、不整地であっても3点で確実に接地することができ、各接地点を線で結んでなる支持多角形が確保される。
【0018】
また、本発明の足部機構によれば、上述のように不整地であっても支持多角形が確保されるので、足部機構に支持多角形を確保するための特別な機構を設ける必要がない。それゆえ、本発明の足部機構は、単純かつ堅牢な構成であり、安価である。
【0019】
また、本発明の足部機構によれば、各接地点または基準接地点を含む仮想足底平面を定義し、その仮想足底平面に固定されたローカル座標軸に基づく実ZMPを容易に算出することができる。
つまり、接地点または基準接地点はベース部材に対して固定されており、かつそれらの座標は既知であるため、各接地点における床反力であって仮想足底平面の法線方向に作用する床反力を検出するだけで、上記実ZMPを容易に算出することができる。
【0020】
また、上述のように、仮想足底平面の法線方向についての床反力のみを検出すれば実ZMPを算出することができるため、床反力検出装置として、検出方向を仮想足底平面の法線方向とした1軸力センサを使用することができる。それゆえ、高価かつ壊れ易い多軸力センサを用いる必要がない。
【発明を実施するための最良の形態】
【0021】
以下、図面を参照して本発明の好ましい一実施形態につき説明する。
図1は本発明にかかる足部機構の一例を示す斜視図、図2は図1の足部機構を適用した二脚歩行式ロボットの一例を示す概略図、図3は図1の足部機構において実ZMPを算出する方法を説明するための図、図4は図2の二脚歩行式ロボットにおける制御ユニットの構成を示すブロック図である。
【0022】
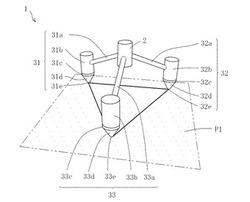
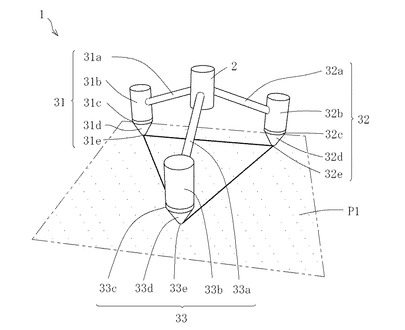
図1に示すように、本実施形態にかかる足部機構1は、後述する脚ユニット4の下端に取り付けられるベース部材2と、ベース部材2からのびる3本の支持部材31,32,33と、を有している。
【0023】
支持部材31,32,33は、図1に示す如く、ベース部材2からのびる連結部31a,32a,33aと、連結部31a,32a,33aの先端に設けられた接地本体部31b,32b,33bと、1軸力センサ(床反力検出装置)31c,32c,33cを介して接地本体部31b,32b,33bに取り付けられた接地片31d,32d,33dと、から構成されている。
【0024】
連結部31a,32a,33aは、棒状に形成されており、ベース部材2の下方であって互いに異なる方向にのびている。
【0025】
接地本体部31b,32b,33bは、連結部31a,32a,33aの先端に接続されている。接地本体部31b,32b,33bの下端には、1軸力センサ31c,32c,33cおよび接地片31d,32d,33dが順次取り付けられている。
【0026】
接地片31d,32d,33dは、接地本体部1b,32b,33b側から下方にのびる先細形状となっている。接地片31d,32d,33dは、その先端の接地点31e,32e,33eのみで接地するようになっている。
【0027】
1軸力センサ31c,32c,33cは、シート状の圧力センサであって、足部機構1が接地した際に受ける床反力を、接地片31d,32d,33dを介して検出する。1軸力センサ31c,32c,33cは、シート面に垂直な方向が検出軸となっている。1軸力センサ31c,32c,33cは、その検出軸方向が、接地点31e,32e,33e全てを含む仮想足底平面(第1の仮想足底平面)P1の法線方向と一致するように配置されている。
【0028】
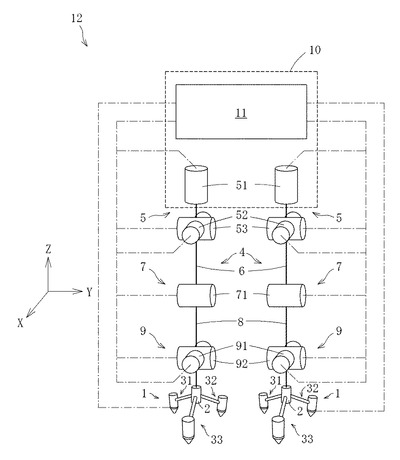
上記のように構成された足部機構1は、図2に示す如く、上体ユニット10および脚ユニット4,4を有する二脚歩行式ロボット12において、各脚ユニット4の下端にベース部材2が連結されて、取り付けられ得る。
【0029】
二脚歩行式ロボット12の脚ユニット4は、図2に示す如く、股関節部5、膝関節部7、足首関節部9、股関節部5と膝関節部7とを連結する大腿リンク6、および膝関節部7と足首関節部9とを連結する下腿リンク8、から構成されている。
【0030】
股関節部5は、図2に示す如く、Z軸まわりの揺動軸51と、X軸まわりの揺動軸52と、Y軸まわりの揺動軸53とにより構成されている。膝関節部7は、Y軸まわりの揺動軸71からなっている。足首関節部9は、X軸まわりの揺動軸91と、Y軸まわりの揺動軸92とにより、構成されている。これにより、脚ユニット4は6自由度を有することとなる。
【0031】
各揺動軸51〜53,71,91,92は、それぞれの軸周りに回転する駆動モータにより構成されている。各駆動モータは、その回転量を検出するロータリエンコーダを備えている。各駆動モータは、上体ユニット10内に格納された制御ユニット11によって駆動制御される。
【0032】
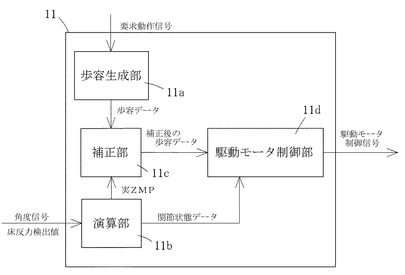
制御ユニット11は、図4に示す如く、歩容生成部11aと、演算部11bと、補正部11cと、駆動モータ制御部11dと、を備えている。
【0033】
歩容生成部11aは、外部から入力される要求動作信号に対応して、脚ユニット4における各揺動軸51〜53,71,91,92の目標角度、目標角速度、および目標ZMP等を含む歩容データを生成し、補正部11cに出力する。
【0034】
演算部11bは、脚ユニット4における各関節部5,7,9の駆動モータに備えられたロータリエンコーダから、各駆動モータの角度信号が入力される。演算部11bは、その角度信号に基づき、各関節部5,7,9の駆動モータの角度、角速度等に関する関節状態データを算出し、駆動モータ制御部11dにそれを出力する。
【0035】
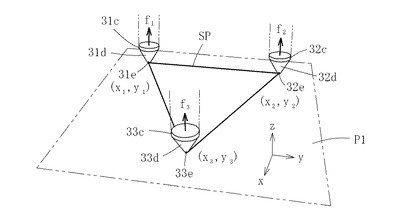
演算部11bにはさらに、足部機構1における1軸力センサ31c,32c,33cから、床反力検出値が入力される。演算部11bは、各支持部材31,32,33における各床反力検出値に基づいて、実ZMPを算出し、補正部11cにそれを出力する。実ZMPは、以下の式より算出される。
ここで、以下の式は、x軸およびy軸が仮想足底平面P1上にあるローカル座標軸(図3参照)に基づいて定義される。つまり、本発明の足部機構1における実ZMPは、仮想足底平面P1に固定されたローカル座標軸に関して算出される。
【0036】
【数1】

【数2】
x実zmp:実ZMPのx座標
y実zmp:実ZMPのy座標
xi:床反力を受けている点のx座標
yi:床反力を受けている点のy座標
fi:仮想足底平面P1に垂直な床反力の大きさ
【0037】
本発明の足部機構1の場合、床反力を受けている点は各接地点31e,32e,33eである。したがって、上記の式(1)および(2)におけるxiおよびyiには、図3に示す各接地点31e,32e,33eの座標(x1,y1)、(x2,y2)、(x3,y3)が代入される。
【0038】
また、1軸力センサ31c,32c,33cは、各接地点31e,32e,33eが受ける床反力のうち、接地点31e,32e,33eを全て含む仮想足底平面P1の法線方向の成分のみを検出するため、その検出値がそのまま上記式(1)および(2)におけるfiに代入される。
【0039】
補正部11cは、演算部11bから入力された実ZMPが、歩容生成部11aから入力された目標ZMPに一致するように、または支持多角形SP内に収まるように、各揺動軸51〜53,71,91,92の目標角度、目標各速度等の歩容データを補正する。補正後の歩容データは、駆動モータ制御部11dに入力される。
【0040】
駆動モータ制御部11dは、補正部11cからの補正後の歩容データと、演算部11bからの関節状態データとの差に基づいて、各関節部5,7,9の駆動モータに対する制御信号を生成する。駆動モータ制御部11dは、その制御信号を各駆動モータに出力することで、各駆動モータを駆動制御する。
【0041】
以上のように構成された二脚歩行式ロボット12は、以下のように、立位バランスを保持する。
【0042】
まず、制御ユニット11における歩容生成部11aが、外部からの要求動作に基づいて、各揺動軸51〜53,71,91,92の目標角度、目標各速度および目標ZMP等の歩容データを生成し、補正部11bに出力する。
【0043】
次に、演算部11bが、各関節部5,7,9に備えられたロータリエンコーダからの信号に基づき、各関節部5,7,9の駆動モータの角度、角速度等に関する関節状態データを算出し、駆動モータ制御部11dに出力する。
【0044】
次に、足部機構1の1軸力センサ31c,32c,33cが、接地点31e,32e,33eにかかる床反力を検出し、その検出値を制御ユニット11の演算部11bに出力する。
【0045】
次に、演算部11bが、1軸力センサ31c,32c,33cからの床反力検出値に基づいて、各接地点31e,32e,33eを含む仮想足底平面P1上の実ZMPを算出し、それを補正部11cに出力する。
【0046】
次に、補正部11cが、演算部11bからの実ZMPが歩容生成部11aからの目標ZMPに一致するように、歩容生成部11aからの歩容データを補正し、補正後の歩容データを駆動モータ制御部11dに出力する。
【0047】
次に、駆動モータ制御部11dが、補正部11cからの補正後の歩容データと、演算部11bからの関節状態データとの差に基づいて、各関節部5,7,9の駆動モータの制御信号を生成し、当該制御信号に基づいて、各駆動モータを制御する。
【0048】
以上のように構成された二脚歩行式ロボット12は、足部機構1の足底が平面ではなく、ベース部材2からのびる3本の支持部材31,32,33の先端、つまり接地点31e,32e,33eで接地する構成となっている。したがって、不整地であっても、各接地点31e,32e,33eは確実に接地することができ、各接地点を線で結んでなる支持多角形SPが確保される。
【0049】
また、本発明の足部機構1によれば、上述のように不整地であっても支持多角形SPが確保されるので、足部機構1に支持多角形SPを確保するための特別な機構を設ける必要がない。それゆえ、足部機構1は、シンプルかつ堅牢な構成であり、安価である。
【0050】
また、本発明の足部機構1によれば、接地点31e,32e,33eを全て含む仮想足底平面P1を定義し、その仮想足底平面P1に固定されたローカル座標軸に基づく実ZMPを容易に算出することができる。
つまり、床反力を受ける点が接地点31e,32e,33eに固定されるため、各接地点31e,32e,33eにおける床反力であって仮想足底平面P1の法線方向についての床反力を検出するだけで、実ZMPを容易に算出することができる。
【0051】
また、上述のように、仮想足底平面P1の法線方向についての床反力のみを検出すれば実ZMPを算出することができるため、床反力検出装置として、検出方向を仮想足底平面P1の法線方向とした1軸力センサを使用することができる。それゆえ、高価かつ壊れ易い多軸力センサを用いる必要がない。
【0052】
また、各脚ユニット4それぞれに独立してZMP規範を用いた立位バランス制御を行うことで、多脚歩行式移動装置全体の立位バランスを保持することができるが、その場合に本発明の足部機構1が好適に使用され得る。本発明の足部機構1によれば、各足部機構1の足底に定義されるローカル座標軸に関する実ZMPを容易に算出できるからである。
なお、各脚ユニット4それぞれに独立してZMP規範を用いた立位バランス制御を行うことで、多脚歩行式移動装置全体の立位バランスを保持することができる理由は、次に議論するとおりである。
【0053】
[単一水平面上での議論]
多脚歩行式移動装置の接地状態において、接地している足がi=1,2,・・・N本あるとする。足iの接地点を簡単のために離散化し、pij(j=1,2,・・・,Ni)とする。
ここで、床面が単一平面であるならば、接地点pijにおける床面に垂直な床反力をfijzとして、多脚歩行式移動装置全体のZMPは次のように導出される。
【数3】
一方、各足のZMPについて考えると、足iのみのZMPは次のようになる。
【数4】
多脚歩行式移動装置全体のZMPは、各足のZMPを用いると、次のように表される。
【数5】
【数6】
一般にfijz>0であることから、αi>0であり、式(6)から、
【数7】
である。したがって、単一平面上における多脚歩行式移動装置の接地状態について、次のことがわかる。
・多脚歩行式移動装置全体のZMPは、各足ZMPのつくる凸包内に存在する。
・各足ZMPの作る凸包内における多脚歩行式移動装置全体のZMPの位置は、すべて
の足を考慮した支持多角形内でαiに依存して変化する。
接地しているN本の足それぞれの支持多角形の凸包が多脚歩行式移動装置全体の支持多角形であることを考えれば、全体と各足のZMPの関係は次のようになる。
・少なくとも1つの各足ZMPが、その足の支持多角形内(境界を除く)に存在するな
らば、多脚歩行式移動装置全体のZMPは、全体の支持多角形内に存在する。
すなわち、必ずしも多脚歩行式移動装置全体のZMPを考慮しなくても、各足ZMPを各足についてローカルに計測し、各足ZMPを各足の支持多角形内に保つように制御することによって、多脚歩行式移動装置全体の立位バランス保持が可能である。
また、式(6)から、例えば上体を動かして各足に加える重量の割合、つまりαiを変化させることにより、各足ZMP位置とは独立に、各足ZMPの作る凸包内で多脚歩行式移動装置全体のZMPの位置を操作できる。すなわち、各足ZMPの各足ローカルな制御によって多脚歩行式移動装置全体の立位バランスを保持しつつ、全く独立な制御を上体に適用し、多脚歩行式移動装置全体のZMPを、例えばある単一の足の支持多角形内に移動させることが可能である。これは、多脚歩行式移動装置の歩行運動における立位バランス保持と歩行動作生成を、それぞれ独立した制御で別個に行なうことを可能にする知見である。
【0054】
[不整地での議論]
単一水平面上での議論と同様に、多脚歩行式移動装置の接地状態において、接地している足がi=1,2,・・・,N本あるとする。足iの接地点を簡単のため離散化し、pij(j=1,2,・・・,Ni)とする。足iは少なくとも3点で接地(Ni≧3)しており、この3点を含む平面を足iの仮想足底平面とする。ただし、不整地であるので、各足の仮想足底平面は必ずしも同一水平面上にない。
この場合でも、接地点pijにおいて仮想足底平面iに垂直な床反力をfijzとし、少なくとも1つの足iにおけるすべての垂直床反力について、fijz>0(j=1,2,・・・,Ni)ならば、足iのZMPは足iの支持多角形内にあり、足iは仮想足底平面における接地状態から剥がれることはない。
すなわち、不整地においてもやはり、必ずしも多脚歩行式移動装置全体のZMPを新たに定義して複雑な解析を行なわなくとも、各足ZMPを各足についてローカルに計測し、各足ZMPを支持多角形内に保つように制御することによって、多脚歩行式移動装置全体の立位バランス保持が可能である。
【0055】
以上、本発明の実施の形態について具体的に説明したが、本発明はこれらに限定されるものではない。
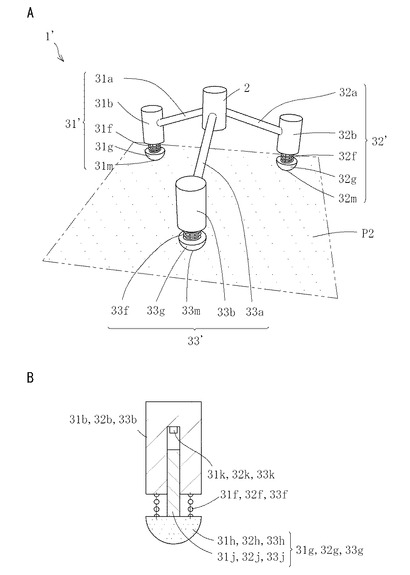
本発明の足部機構における3つの接地点の位置関係は固定されているのが原則であるが、仮想足底平面の法線方向への比較的小さな変位であれば、実際上問題ない。そこで、図5に示す如く、足部機構1’の支持部材31’,32’,33’に簡単な緩衝機構を導入してもよい。
【0056】
つまり、支持部材31’,32’,33’を、ベース部材2からのびる連結部31a,32a,33aと、連結部31a,32a,33aの先端に設けられた接地本体部31b,32b,33bと、接地本体部31b、32b、33bにスライド可能に保持されたスライド片31g,32g,33gと、スライド片31g,32g,33gをスライド方向であって床反力に逆らう方向に付勢する圧縮ばね(付勢手段)31f,32f,33fと、から構成してもよい。
【0057】
このとき、スライド片31g,32g,33gは、図5Bに示す如く、軸部31j,32j,33jと、接地部31h,32h,33hとから構成される。接地部31h,32h,33hは、下方に向かって凸となる半球状に形成されている。接地部31h,32h,33hは、硬質ゴムやウレタンなどの柔軟材からなっている。軸部31j,32j,33jは、接地本体部31b、32b、33b内に収容され、ガイドされる。スライド片31g,32g,33gは、スライド方向が基準接地点31m,32m,33m全てを含む仮想足底平面(第2の仮想足底平面)P2の法線方向と一致するように配置されている。
【0058】
ここで、基準接地点31m,32m,33mとしては、スライド片31g,32g,33gのスライド軸上にある点であって、実際の接地点の近傍となる固定点、例えば、足部機構1’が接地していないときのスライド片31g,32g,33gの最下点や、足部機構1’が均等な床反力を受けるように平面上に接地したときのスライド片31g,32g,33gの接地点などの適切な点を、予め定めておく。
【0059】
圧縮ばね31f,32f,33fは、接地本体部31b、32b、33bと、スライド片31g,32g,33gの接地部31h,32h,33hとの間に配置される。
【0060】
スライド片31g,32g,33gの近傍には、図5Bに示す如く、スライド片のスライド量を検出するための検出器31k,32k,33kが配置される。検出器31k,32k,33kとしては、ポテンショメータやレーザー変位計、ギャップセンサ等が使用され得る。
【0061】
検出器31g,32g,33gによって検出されたスライド片31g,32g,33gのスライド量、つまり圧縮ばね31f,32f,33fの収縮量と、フックの法則とに基づき、床反力が算出される。
【0062】
上記のように緩衝機構を設けた足部機構1’によれば、足部機構1’が接地した際の衝撃を緩和し、多脚歩行式移動装置の各駆動部や各関節部を保護することができる。
【0063】
また、足部機構1’は、基準接地点31m,32m,33mが、スライド軸上にある点であって、実際の接地点の近傍となる固定点(スライド片が変位しても変位しない点)とされている。それゆえ、図8に例示するように、スライド片31g,32g,33gが接地状況に応じてスライドし、基準接地点31m,32m,33mと実際の接地点とが一致しない状況になっても、実ZMPの算出上は微差であり、基準接地点を接地点と取り扱って実ZMPを算出しても問題がない。つまり、足部機構1’によれば、仮想足底平面P2に固定されたローカル座標軸に基づく実ZMPを、上記実施形態と同様、容易に算出することができる。
【図面の簡単な説明】
【0064】
【図1】本発明にかかる足部機構の一例を示す斜視図である。
【図2】図1の足部機構を適用した二脚歩行式ロボットの一例を示す概略図である。
【図3】図1の足部機構においてZMPを算出する方法を説明するための図である。
【図4】図2の二脚歩行式ロボットにおける制御ユニットの構成を示すブロック図である。
【図5】本発明にかかる足部機構の変形例を示す斜視図である。
【図6】従来例にかかる二脚歩行式ロボットの一例を示す概略図である。
【図7】第1の仮想足底平面を説明するための図である。
【図8】第2の仮想足底平面を説明するための図である。
【図9】従来例にかかる足部機構が不整地歩行した際の状態を示す図である。
【図10】別の従来例にかかる足部機構を説明するための図である。
【図11】さらに別の従来例にかかる足部機構を説明するための図である。
【符号の説明】
【0065】
P 仮想足底平面
1 足部機構
2 ベース部材
31,32,33 支持部材
31a,32a,33a 連結部
31b,32b,33b 接地本体部
31c,32c,33c 1軸力センサ(床反力検出装置)
31d,32d,33d 接地片
31e,32e,33e 接地点
【技術分野】
【0001】
本発明は、床反力制御によって立位バランスを保持する多脚歩行式移動装置の脚ユニットに取り付けられて接地する、足部機構に関するものである。
【背景技術】
【0002】
従来の多脚歩行式移動装置、例えば二脚歩行式ロボットは一般に、図6に示す如く、上体ユニット110と、上体ユニット110の下部に取り付けられた脚ユニット4,4とを有している。脚ユニット4は、股関節部5と、大腿リンク6を介して股関節部5に連結された膝関節部7と、下腿リンク8を介して膝関節部7に連結された足首関節部9と、足首関節部9に連結された足部機構101とにより、構成されている。
【0003】
股関節部5は、Z軸まわりの揺動軸51と、X軸まわりの揺動軸52と、Y軸まわりの揺動軸53とにより構成されている。膝関節部7は、Y軸まわりの揺動軸71からなっている。足首関節部9は、X軸まわりの揺動軸91と、Y軸まわりの揺動軸92とにより、構成されている。つまり、脚ユニット4は6自由度を有している。
なお、ここでのX軸方向、Y軸方向およびZ軸方向とは、二脚歩行式ロボット112の前後方向(前方+)、横方向(右方+)、上下方向(上方+)を指す(以下同じ)。
【0004】
各揺動軸51〜53,71,91,92は、それぞれの軸周りに回転する駆動モータにより構成されている。各駆動モータは、上体ユニット110内に格納された制御ユニット111によって駆動制御される。
【0005】
制御ユニット111は、外部からの要求動作に対応して歩容データを生成する歩容生成部(不図示)と、この歩容データに基づいて各関節部5,7,9の駆動モータを駆動制御する歩行制御部(不図示)と、を備えている。
【0006】
歩容生成部は、各関節部5,7,9における駆動モータの目標角度、目標角速度等を含む歩容データを生成する。歩行制御部は、その歩容データに従って各関節部5,7,9の駆動モータを駆動制御することにより、所定の歩行パターンで脚ユニット4を揺動させる。これにより、二脚歩行式ロボット112は、二脚歩行を実現している。
【0007】
上記のような二脚歩行式ロボットの立位バランス保持に関し、ZMP規範が適用され得る。ここで、「ZMP(Zero Moment Point)」とは、ロボットの足底が受ける床反力の圧力中心であり、足底が平面である場合には足底が床面から受けるモーメント(の水平成分)がゼロになる点のことである。ZMP規範とは、このZMPが、3点以上の接地点を線で結ぶことで形成される支持多角形の内側にあれば、ロボットは転倒せずに安定に歩行し得るとする規範である。
【0008】
このZMP規範に基づき、歩行中における実際のZMP(以下、実ZMPと称する)を、所定の歩行パターンにおける目標ZMPに一致させるように、ロボットの状態を制御することにより、多脚歩行式移動装置の立位バランスを保持することができる。
【0009】
ところで、従来の多脚歩行式ロボットの足部機構は、その足底が単一平面で構成されていることが多い。足底が単一平面であると、図9(非特許文献1の図2を引用)に示す如く、不整地歩行の際、凸部Cに乗り上げる等、足底全体が接地しない場合がある。この場合、支持多角形SPの面積が小さくなり、立位バランスを保持することが困難となっていた。
【0010】
この問題に対し、例えば、非特許文献1記載の足部機構が提案されている。
非特許文献1記載の足部機構201は、図10(非特許文献1の図3を引用)に示す如く、足部機構201の4隅に受動的に上下動する支持部材203を有していて、路面の凹凸にならうようになっている。各支持部材203には、それぞれ接地を感知するスイッチ(不図示)が設けられている。スイッチが4つの支持部材203全ての接地を感知すると、各支持部材203がロックされる。これにより、速やかに支持多角形が構成され、保持される。
【0011】
また、特許文献1記載の足部機構が提案されている。
特許文献1記載の足部機構301は主に、図11(特許文献1の図2を引用)に示す如く、ベース部302と、ベース部302の後端付近に固定配置された踵部331と、ベース部302の下端に設けられた関節部(駆動モータ)332,332と、関節部332,332から実質的に前方に向かって並んで延び、ベース部302に対して上下に揺動可能に配置された一対の足先部333,333と、から構成されている。踵部331および足先部333,333の先端の下面には、床反力情報を得るための3軸力センサ334が設けられている。各3軸力センサ334からの検出値に基づき、関節部332,332が適宜駆動制御されることにより、不整地においても、踵部331と足先部333,333とで常に3点接地するようになっている。
【非特許文献1】橋本健二,菅原雄介,林昭宏,川瀬正幹,太田章博,田中智明,遠藤信綱,沢戸瑛昌,林憲玉,高西淳夫:2足歩行ロボットの不正地適応能力向上を図った足部機構の開発(第3報:新保持機構開発による不整地歩行の実現),第24回日本ロボット学会学術講演会講演論文集,2F15, 2006.
【特許文献1】特開2004−90194号公報
【発明の開示】
【発明が解決しようとする課題】
【0012】
しかしながら、非特許文献1記載の足部機構は、支持部材を上下動させるための機構や支持部材をロックする機構、接地を感知するスイッチ等を設ける必要があり、複雑な構成となっていた。
【0013】
また、特許文献1記載の足部機構は、足先部が揺動するため、複雑な構成であった。特許文献1記載の足部機構はさらに、立位バランス制御に十分な床反力情報を得るためには、3つの3軸力センサが必要であった。一般に、多軸力センサは高価かつ壊れ易いため、不整地を歩行する大型の多脚歩行式移動装置にこの足部機構を適用することは困難であった。
【0014】
本発明は上記事情に鑑みてなされたものであり、その目的とするところは、不整地歩行においても、支持多角形の面積を確保することができると共に、立位バランス制御に必要かつ十分な床反力情報を取得することができる、シンプルな構成の多脚歩行式移動装置の足部機構を提供することにある。
【課題を解決するための手段】
【0015】
上記課題を解決するために本発明は、(1) 多脚歩行式移動装置における脚ユニットの下端に取り付けられて接地する足部機構であって、前記脚ユニットの下端に取り付けられるベース部材と、前記ベース部材に固定されていて、一直線上に並ばない3つの接地点を有すると共に、当該接地点のみで接地するようになっている支持部材と、前記支持部材に設けられ、前記接地点における床反力をそれぞれ検出する床反力検出装置であって、前記接地点全てを含んでなる第1の仮想足底平面の法線方向に作用する床反力のみを検出するものと、を備えてなることを特徴とする多脚歩行式移動装置の足部機構を提供するものである。
ここで、「足」とは人間でいう足首からつま先までに対応する部分を指し、「脚」とは人間でいう足首から骨盤までに対応する部分を指す(以下、同じ)。
また、「第1の仮想足底平面」とは、足部機構における3本の支持部材の先端(接地点)全てを含む(通る)平面を指す(以下、同じ)。つまり、「第1の仮想足底平面」は、例えば不整地等において支持部材の先端が突起上に乗り上げたとき、図7に示す如く、実際の床面とは一致しないこととなる。なお、図7は、2次元的に表現する都合上、足部機構の支持部材を2本としている。
また、「前記接地点全てを含んでなる第1の仮想足底平面の法線方向に作用する床反力」は、例えば不整地等において支持部材の先端が突起上に乗り上げたときのものを図示すると、図7のようになる。
【0016】
また、本発明は、(2) 多脚歩行式移動装置における脚ユニットの下端に取り付けられて接地する足部機構であって、前記脚ユニットの下端に取り付けられるベース部材と、前記ベース部材に固定された支持部材であって、前記ベース部材に対して固定された一直線上に並ばない3つの基準接地点と、当該基準接地点全てを含んでなる第2の仮想足底平面の法線方向に沿って当該基準接地点を通る軸上をスライド可能であると共に、前記基準接地点近傍にそれぞれ接地点を有する3つのスライド片と、を備えていて、前記接地点のみで接地するようになっているものと、前記支持部材に設けられ、前記スライド片を、そのスライドの方向であって前記接地点における床反力に逆らう方向に付勢する付勢手段と、前記支持部材に設けられ、前記接地点における床反力をそれぞれ検出する床反力検出装置であって、前記スライド片のスライド変位量を検出する検出器を備え、当該検出器によって検出した前記スライド変位量から、前記第2の仮想足底平面の法線方向に作用する床反力のみを算出するものと、を備えてなることを特徴とする多脚歩行式移動装置の足部機構を提供するものである。
ここで、「基準接地点」とは、実際の接地点近傍にそれぞれ定義されるベース部材に対して固定された点であって、実際の接地点とは必ずしも一致しないが、実ZMP算出上、接地点と同等に取り扱っても問題ない点を指す。
【発明の効果】
【0017】
本発明の多脚歩行式移動装置の足部機構は、足底が平面や曲面ではなく、支持部材の先端3点のみで接地する構成となっている。したがって、本発明の足部機構によれば、不整地であっても3点で確実に接地することができ、各接地点を線で結んでなる支持多角形が確保される。
【0018】
また、本発明の足部機構によれば、上述のように不整地であっても支持多角形が確保されるので、足部機構に支持多角形を確保するための特別な機構を設ける必要がない。それゆえ、本発明の足部機構は、単純かつ堅牢な構成であり、安価である。
【0019】
また、本発明の足部機構によれば、各接地点または基準接地点を含む仮想足底平面を定義し、その仮想足底平面に固定されたローカル座標軸に基づく実ZMPを容易に算出することができる。
つまり、接地点または基準接地点はベース部材に対して固定されており、かつそれらの座標は既知であるため、各接地点における床反力であって仮想足底平面の法線方向に作用する床反力を検出するだけで、上記実ZMPを容易に算出することができる。
【0020】
また、上述のように、仮想足底平面の法線方向についての床反力のみを検出すれば実ZMPを算出することができるため、床反力検出装置として、検出方向を仮想足底平面の法線方向とした1軸力センサを使用することができる。それゆえ、高価かつ壊れ易い多軸力センサを用いる必要がない。
【発明を実施するための最良の形態】
【0021】
以下、図面を参照して本発明の好ましい一実施形態につき説明する。
図1は本発明にかかる足部機構の一例を示す斜視図、図2は図1の足部機構を適用した二脚歩行式ロボットの一例を示す概略図、図3は図1の足部機構において実ZMPを算出する方法を説明するための図、図4は図2の二脚歩行式ロボットにおける制御ユニットの構成を示すブロック図である。
【0022】
図1に示すように、本実施形態にかかる足部機構1は、後述する脚ユニット4の下端に取り付けられるベース部材2と、ベース部材2からのびる3本の支持部材31,32,33と、を有している。
【0023】
支持部材31,32,33は、図1に示す如く、ベース部材2からのびる連結部31a,32a,33aと、連結部31a,32a,33aの先端に設けられた接地本体部31b,32b,33bと、1軸力センサ(床反力検出装置)31c,32c,33cを介して接地本体部31b,32b,33bに取り付けられた接地片31d,32d,33dと、から構成されている。
【0024】
連結部31a,32a,33aは、棒状に形成されており、ベース部材2の下方であって互いに異なる方向にのびている。
【0025】
接地本体部31b,32b,33bは、連結部31a,32a,33aの先端に接続されている。接地本体部31b,32b,33bの下端には、1軸力センサ31c,32c,33cおよび接地片31d,32d,33dが順次取り付けられている。
【0026】
接地片31d,32d,33dは、接地本体部1b,32b,33b側から下方にのびる先細形状となっている。接地片31d,32d,33dは、その先端の接地点31e,32e,33eのみで接地するようになっている。
【0027】
1軸力センサ31c,32c,33cは、シート状の圧力センサであって、足部機構1が接地した際に受ける床反力を、接地片31d,32d,33dを介して検出する。1軸力センサ31c,32c,33cは、シート面に垂直な方向が検出軸となっている。1軸力センサ31c,32c,33cは、その検出軸方向が、接地点31e,32e,33e全てを含む仮想足底平面(第1の仮想足底平面)P1の法線方向と一致するように配置されている。
【0028】
上記のように構成された足部機構1は、図2に示す如く、上体ユニット10および脚ユニット4,4を有する二脚歩行式ロボット12において、各脚ユニット4の下端にベース部材2が連結されて、取り付けられ得る。
【0029】
二脚歩行式ロボット12の脚ユニット4は、図2に示す如く、股関節部5、膝関節部7、足首関節部9、股関節部5と膝関節部7とを連結する大腿リンク6、および膝関節部7と足首関節部9とを連結する下腿リンク8、から構成されている。
【0030】
股関節部5は、図2に示す如く、Z軸まわりの揺動軸51と、X軸まわりの揺動軸52と、Y軸まわりの揺動軸53とにより構成されている。膝関節部7は、Y軸まわりの揺動軸71からなっている。足首関節部9は、X軸まわりの揺動軸91と、Y軸まわりの揺動軸92とにより、構成されている。これにより、脚ユニット4は6自由度を有することとなる。
【0031】
各揺動軸51〜53,71,91,92は、それぞれの軸周りに回転する駆動モータにより構成されている。各駆動モータは、その回転量を検出するロータリエンコーダを備えている。各駆動モータは、上体ユニット10内に格納された制御ユニット11によって駆動制御される。
【0032】
制御ユニット11は、図4に示す如く、歩容生成部11aと、演算部11bと、補正部11cと、駆動モータ制御部11dと、を備えている。
【0033】
歩容生成部11aは、外部から入力される要求動作信号に対応して、脚ユニット4における各揺動軸51〜53,71,91,92の目標角度、目標角速度、および目標ZMP等を含む歩容データを生成し、補正部11cに出力する。
【0034】
演算部11bは、脚ユニット4における各関節部5,7,9の駆動モータに備えられたロータリエンコーダから、各駆動モータの角度信号が入力される。演算部11bは、その角度信号に基づき、各関節部5,7,9の駆動モータの角度、角速度等に関する関節状態データを算出し、駆動モータ制御部11dにそれを出力する。
【0035】
演算部11bにはさらに、足部機構1における1軸力センサ31c,32c,33cから、床反力検出値が入力される。演算部11bは、各支持部材31,32,33における各床反力検出値に基づいて、実ZMPを算出し、補正部11cにそれを出力する。実ZMPは、以下の式より算出される。
ここで、以下の式は、x軸およびy軸が仮想足底平面P1上にあるローカル座標軸(図3参照)に基づいて定義される。つまり、本発明の足部機構1における実ZMPは、仮想足底平面P1に固定されたローカル座標軸に関して算出される。
【0036】
【数1】
【数2】
x実zmp:実ZMPのx座標
y実zmp:実ZMPのy座標
xi:床反力を受けている点のx座標
yi:床反力を受けている点のy座標
fi:仮想足底平面P1に垂直な床反力の大きさ
【0037】
本発明の足部機構1の場合、床反力を受けている点は各接地点31e,32e,33eである。したがって、上記の式(1)および(2)におけるxiおよびyiには、図3に示す各接地点31e,32e,33eの座標(x1,y1)、(x2,y2)、(x3,y3)が代入される。
【0038】
また、1軸力センサ31c,32c,33cは、各接地点31e,32e,33eが受ける床反力のうち、接地点31e,32e,33eを全て含む仮想足底平面P1の法線方向の成分のみを検出するため、その検出値がそのまま上記式(1)および(2)におけるfiに代入される。
【0039】
補正部11cは、演算部11bから入力された実ZMPが、歩容生成部11aから入力された目標ZMPに一致するように、または支持多角形SP内に収まるように、各揺動軸51〜53,71,91,92の目標角度、目標各速度等の歩容データを補正する。補正後の歩容データは、駆動モータ制御部11dに入力される。
【0040】
駆動モータ制御部11dは、補正部11cからの補正後の歩容データと、演算部11bからの関節状態データとの差に基づいて、各関節部5,7,9の駆動モータに対する制御信号を生成する。駆動モータ制御部11dは、その制御信号を各駆動モータに出力することで、各駆動モータを駆動制御する。
【0041】
以上のように構成された二脚歩行式ロボット12は、以下のように、立位バランスを保持する。
【0042】
まず、制御ユニット11における歩容生成部11aが、外部からの要求動作に基づいて、各揺動軸51〜53,71,91,92の目標角度、目標各速度および目標ZMP等の歩容データを生成し、補正部11bに出力する。
【0043】
次に、演算部11bが、各関節部5,7,9に備えられたロータリエンコーダからの信号に基づき、各関節部5,7,9の駆動モータの角度、角速度等に関する関節状態データを算出し、駆動モータ制御部11dに出力する。
【0044】
次に、足部機構1の1軸力センサ31c,32c,33cが、接地点31e,32e,33eにかかる床反力を検出し、その検出値を制御ユニット11の演算部11bに出力する。
【0045】
次に、演算部11bが、1軸力センサ31c,32c,33cからの床反力検出値に基づいて、各接地点31e,32e,33eを含む仮想足底平面P1上の実ZMPを算出し、それを補正部11cに出力する。
【0046】
次に、補正部11cが、演算部11bからの実ZMPが歩容生成部11aからの目標ZMPに一致するように、歩容生成部11aからの歩容データを補正し、補正後の歩容データを駆動モータ制御部11dに出力する。
【0047】
次に、駆動モータ制御部11dが、補正部11cからの補正後の歩容データと、演算部11bからの関節状態データとの差に基づいて、各関節部5,7,9の駆動モータの制御信号を生成し、当該制御信号に基づいて、各駆動モータを制御する。
【0048】
以上のように構成された二脚歩行式ロボット12は、足部機構1の足底が平面ではなく、ベース部材2からのびる3本の支持部材31,32,33の先端、つまり接地点31e,32e,33eで接地する構成となっている。したがって、不整地であっても、各接地点31e,32e,33eは確実に接地することができ、各接地点を線で結んでなる支持多角形SPが確保される。
【0049】
また、本発明の足部機構1によれば、上述のように不整地であっても支持多角形SPが確保されるので、足部機構1に支持多角形SPを確保するための特別な機構を設ける必要がない。それゆえ、足部機構1は、シンプルかつ堅牢な構成であり、安価である。
【0050】
また、本発明の足部機構1によれば、接地点31e,32e,33eを全て含む仮想足底平面P1を定義し、その仮想足底平面P1に固定されたローカル座標軸に基づく実ZMPを容易に算出することができる。
つまり、床反力を受ける点が接地点31e,32e,33eに固定されるため、各接地点31e,32e,33eにおける床反力であって仮想足底平面P1の法線方向についての床反力を検出するだけで、実ZMPを容易に算出することができる。
【0051】
また、上述のように、仮想足底平面P1の法線方向についての床反力のみを検出すれば実ZMPを算出することができるため、床反力検出装置として、検出方向を仮想足底平面P1の法線方向とした1軸力センサを使用することができる。それゆえ、高価かつ壊れ易い多軸力センサを用いる必要がない。
【0052】
また、各脚ユニット4それぞれに独立してZMP規範を用いた立位バランス制御を行うことで、多脚歩行式移動装置全体の立位バランスを保持することができるが、その場合に本発明の足部機構1が好適に使用され得る。本発明の足部機構1によれば、各足部機構1の足底に定義されるローカル座標軸に関する実ZMPを容易に算出できるからである。
なお、各脚ユニット4それぞれに独立してZMP規範を用いた立位バランス制御を行うことで、多脚歩行式移動装置全体の立位バランスを保持することができる理由は、次に議論するとおりである。
【0053】
[単一水平面上での議論]
多脚歩行式移動装置の接地状態において、接地している足がi=1,2,・・・N本あるとする。足iの接地点を簡単のために離散化し、pij(j=1,2,・・・,Ni)とする。
ここで、床面が単一平面であるならば、接地点pijにおける床面に垂直な床反力をfijzとして、多脚歩行式移動装置全体のZMPは次のように導出される。
【数3】
一方、各足のZMPについて考えると、足iのみのZMPは次のようになる。
【数4】
多脚歩行式移動装置全体のZMPは、各足のZMPを用いると、次のように表される。
【数5】
【数6】
一般にfijz>0であることから、αi>0であり、式(6)から、
【数7】
である。したがって、単一平面上における多脚歩行式移動装置の接地状態について、次のことがわかる。
・多脚歩行式移動装置全体のZMPは、各足ZMPのつくる凸包内に存在する。
・各足ZMPの作る凸包内における多脚歩行式移動装置全体のZMPの位置は、すべて
の足を考慮した支持多角形内でαiに依存して変化する。
接地しているN本の足それぞれの支持多角形の凸包が多脚歩行式移動装置全体の支持多角形であることを考えれば、全体と各足のZMPの関係は次のようになる。
・少なくとも1つの各足ZMPが、その足の支持多角形内(境界を除く)に存在するな
らば、多脚歩行式移動装置全体のZMPは、全体の支持多角形内に存在する。
すなわち、必ずしも多脚歩行式移動装置全体のZMPを考慮しなくても、各足ZMPを各足についてローカルに計測し、各足ZMPを各足の支持多角形内に保つように制御することによって、多脚歩行式移動装置全体の立位バランス保持が可能である。
また、式(6)から、例えば上体を動かして各足に加える重量の割合、つまりαiを変化させることにより、各足ZMP位置とは独立に、各足ZMPの作る凸包内で多脚歩行式移動装置全体のZMPの位置を操作できる。すなわち、各足ZMPの各足ローカルな制御によって多脚歩行式移動装置全体の立位バランスを保持しつつ、全く独立な制御を上体に適用し、多脚歩行式移動装置全体のZMPを、例えばある単一の足の支持多角形内に移動させることが可能である。これは、多脚歩行式移動装置の歩行運動における立位バランス保持と歩行動作生成を、それぞれ独立した制御で別個に行なうことを可能にする知見である。
【0054】
[不整地での議論]
単一水平面上での議論と同様に、多脚歩行式移動装置の接地状態において、接地している足がi=1,2,・・・,N本あるとする。足iの接地点を簡単のため離散化し、pij(j=1,2,・・・,Ni)とする。足iは少なくとも3点で接地(Ni≧3)しており、この3点を含む平面を足iの仮想足底平面とする。ただし、不整地であるので、各足の仮想足底平面は必ずしも同一水平面上にない。
この場合でも、接地点pijにおいて仮想足底平面iに垂直な床反力をfijzとし、少なくとも1つの足iにおけるすべての垂直床反力について、fijz>0(j=1,2,・・・,Ni)ならば、足iのZMPは足iの支持多角形内にあり、足iは仮想足底平面における接地状態から剥がれることはない。
すなわち、不整地においてもやはり、必ずしも多脚歩行式移動装置全体のZMPを新たに定義して複雑な解析を行なわなくとも、各足ZMPを各足についてローカルに計測し、各足ZMPを支持多角形内に保つように制御することによって、多脚歩行式移動装置全体の立位バランス保持が可能である。
【0055】
以上、本発明の実施の形態について具体的に説明したが、本発明はこれらに限定されるものではない。
本発明の足部機構における3つの接地点の位置関係は固定されているのが原則であるが、仮想足底平面の法線方向への比較的小さな変位であれば、実際上問題ない。そこで、図5に示す如く、足部機構1’の支持部材31’,32’,33’に簡単な緩衝機構を導入してもよい。
【0056】
つまり、支持部材31’,32’,33’を、ベース部材2からのびる連結部31a,32a,33aと、連結部31a,32a,33aの先端に設けられた接地本体部31b,32b,33bと、接地本体部31b、32b、33bにスライド可能に保持されたスライド片31g,32g,33gと、スライド片31g,32g,33gをスライド方向であって床反力に逆らう方向に付勢する圧縮ばね(付勢手段)31f,32f,33fと、から構成してもよい。
【0057】
このとき、スライド片31g,32g,33gは、図5Bに示す如く、軸部31j,32j,33jと、接地部31h,32h,33hとから構成される。接地部31h,32h,33hは、下方に向かって凸となる半球状に形成されている。接地部31h,32h,33hは、硬質ゴムやウレタンなどの柔軟材からなっている。軸部31j,32j,33jは、接地本体部31b、32b、33b内に収容され、ガイドされる。スライド片31g,32g,33gは、スライド方向が基準接地点31m,32m,33m全てを含む仮想足底平面(第2の仮想足底平面)P2の法線方向と一致するように配置されている。
【0058】
ここで、基準接地点31m,32m,33mとしては、スライド片31g,32g,33gのスライド軸上にある点であって、実際の接地点の近傍となる固定点、例えば、足部機構1’が接地していないときのスライド片31g,32g,33gの最下点や、足部機構1’が均等な床反力を受けるように平面上に接地したときのスライド片31g,32g,33gの接地点などの適切な点を、予め定めておく。
【0059】
圧縮ばね31f,32f,33fは、接地本体部31b、32b、33bと、スライド片31g,32g,33gの接地部31h,32h,33hとの間に配置される。
【0060】
スライド片31g,32g,33gの近傍には、図5Bに示す如く、スライド片のスライド量を検出するための検出器31k,32k,33kが配置される。検出器31k,32k,33kとしては、ポテンショメータやレーザー変位計、ギャップセンサ等が使用され得る。
【0061】
検出器31g,32g,33gによって検出されたスライド片31g,32g,33gのスライド量、つまり圧縮ばね31f,32f,33fの収縮量と、フックの法則とに基づき、床反力が算出される。
【0062】
上記のように緩衝機構を設けた足部機構1’によれば、足部機構1’が接地した際の衝撃を緩和し、多脚歩行式移動装置の各駆動部や各関節部を保護することができる。
【0063】
また、足部機構1’は、基準接地点31m,32m,33mが、スライド軸上にある点であって、実際の接地点の近傍となる固定点(スライド片が変位しても変位しない点)とされている。それゆえ、図8に例示するように、スライド片31g,32g,33gが接地状況に応じてスライドし、基準接地点31m,32m,33mと実際の接地点とが一致しない状況になっても、実ZMPの算出上は微差であり、基準接地点を接地点と取り扱って実ZMPを算出しても問題がない。つまり、足部機構1’によれば、仮想足底平面P2に固定されたローカル座標軸に基づく実ZMPを、上記実施形態と同様、容易に算出することができる。
【図面の簡単な説明】
【0064】
【図1】本発明にかかる足部機構の一例を示す斜視図である。
【図2】図1の足部機構を適用した二脚歩行式ロボットの一例を示す概略図である。
【図3】図1の足部機構においてZMPを算出する方法を説明するための図である。
【図4】図2の二脚歩行式ロボットにおける制御ユニットの構成を示すブロック図である。
【図5】本発明にかかる足部機構の変形例を示す斜視図である。
【図6】従来例にかかる二脚歩行式ロボットの一例を示す概略図である。
【図7】第1の仮想足底平面を説明するための図である。
【図8】第2の仮想足底平面を説明するための図である。
【図9】従来例にかかる足部機構が不整地歩行した際の状態を示す図である。
【図10】別の従来例にかかる足部機構を説明するための図である。
【図11】さらに別の従来例にかかる足部機構を説明するための図である。
【符号の説明】
【0065】
P 仮想足底平面
1 足部機構
2 ベース部材
31,32,33 支持部材
31a,32a,33a 連結部
31b,32b,33b 接地本体部
31c,32c,33c 1軸力センサ(床反力検出装置)
31d,32d,33d 接地片
31e,32e,33e 接地点
【特許請求の範囲】
【請求項1】
多脚歩行式移動装置における脚ユニットの下端に取り付けられて接地する足部機構であって、
前記脚ユニットの下端に取り付けられるベース部材と、
前記ベース部材に固定されていて、一直線上に並ばない3つの接地点を有すると共に、当該接地点のみで接地するようになっている支持部材と、
前記支持部材に設けられ、前記接地点における床反力をそれぞれ検出する床反力検出装置であって、前記接地点全てを含んでなる第1の仮想足底平面の法線方向に作用する床反力のみを検出するものと、
を備えてなることを特徴とする多脚歩行式移動装置の足部機構。
【請求項2】
多脚歩行式移動装置における脚ユニットの下端に取り付けられて接地する足部機構であって、
前記脚ユニットの下端に取り付けられるベース部材と、
前記ベース部材に固定された支持部材であって、前記ベース部材に対して固定された一直線上に並ばない3つの基準接地点と、当該基準接地点全てを含んでなる第2の仮想足底平面の法線方向に沿って当該基準接地点を通る軸上をスライド可能であると共に、前記基準接地点近傍にそれぞれ接地点を有する3つのスライド片と、を備えていて、前記接地点のみで接地するようになっているものと、
前記支持部材に設けられ、前記スライド片を、そのスライドの方向であって前記接地点における床反力に逆らう方向に付勢する付勢手段と、
前記支持部材に設けられ、前記接地点における床反力をそれぞれ検出する床反力検出装置であって、前記スライド片のスライド変位量を検出する検出器を備え、当該検出器によって検出した前記スライド変位量から、前記第2の仮想足底平面の法線方向に作用する床反力のみを算出するものと、
を備えてなることを特徴とする多脚歩行式移動装置の足部機構。
【請求項1】
多脚歩行式移動装置における脚ユニットの下端に取り付けられて接地する足部機構であって、
前記脚ユニットの下端に取り付けられるベース部材と、
前記ベース部材に固定されていて、一直線上に並ばない3つの接地点を有すると共に、当該接地点のみで接地するようになっている支持部材と、
前記支持部材に設けられ、前記接地点における床反力をそれぞれ検出する床反力検出装置であって、前記接地点全てを含んでなる第1の仮想足底平面の法線方向に作用する床反力のみを検出するものと、
を備えてなることを特徴とする多脚歩行式移動装置の足部機構。
【請求項2】
多脚歩行式移動装置における脚ユニットの下端に取り付けられて接地する足部機構であって、
前記脚ユニットの下端に取り付けられるベース部材と、
前記ベース部材に固定された支持部材であって、前記ベース部材に対して固定された一直線上に並ばない3つの基準接地点と、当該基準接地点全てを含んでなる第2の仮想足底平面の法線方向に沿って当該基準接地点を通る軸上をスライド可能であると共に、前記基準接地点近傍にそれぞれ接地点を有する3つのスライド片と、を備えていて、前記接地点のみで接地するようになっているものと、
前記支持部材に設けられ、前記スライド片を、そのスライドの方向であって前記接地点における床反力に逆らう方向に付勢する付勢手段と、
前記支持部材に設けられ、前記接地点における床反力をそれぞれ検出する床反力検出装置であって、前記スライド片のスライド変位量を検出する検出器を備え、当該検出器によって検出した前記スライド変位量から、前記第2の仮想足底平面の法線方向に作用する床反力のみを算出するものと、
を備えてなることを特徴とする多脚歩行式移動装置の足部機構。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2009−113146(P2009−113146A)
【公開日】平成21年5月28日(2009.5.28)
【国際特許分類】
【出願番号】特願2007−288103(P2007−288103)
【出願日】平成19年11月6日(2007.11.6)
【出願人】(593006630)学校法人立命館 (359)
【Fターム(参考)】
【公開日】平成21年5月28日(2009.5.28)
【国際特許分類】
【出願日】平成19年11月6日(2007.11.6)
【出願人】(593006630)学校法人立命館 (359)
【Fターム(参考)】
[ Back to top ]