
多視点裸眼立体内視鏡システム
【課題】本発明は、立体内視鏡システムに特有のストレスから手術スタッフを解放するとともに、質の高い施術を支援することができる新規な立体内視鏡システムを提供することを目的とする。
【解決手段】立体内視鏡用ステレオカメラによって取得されたステレオ画像に基づいて撮像対象の奥行値とRGB値を関連付けた3Dデータを生成し、当該3Dデータに基づいて描画した複数の仮想的な視点に対応する複数のステレオ画像が集約してなる多視点ステレオ画像を多視点裸眼立体ディスプレイ装置に表示させることによって、患部の実写映像の多視点裸眼立体視を実現する。
【解決手段】立体内視鏡用ステレオカメラによって取得されたステレオ画像に基づいて撮像対象の奥行値とRGB値を関連付けた3Dデータを生成し、当該3Dデータに基づいて描画した複数の仮想的な視点に対応する複数のステレオ画像が集約してなる多視点ステレオ画像を多視点裸眼立体ディスプレイ装置に表示させることによって、患部の実写映像の多視点裸眼立体視を実現する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、立体内視鏡システムに関し、より詳細には、多視点裸眼立体内視鏡システムに関する。
【背景技術】
【0002】
近年、外科分野において内視鏡手術が急速に普及している。内視鏡手術によれば、鉗子などの手術器具と内視鏡スコープを挿入するための小さな切開だけで済むため、従来の開腹手術に比べて手術創を格段に小さくすることができ、患者の身体的負担を軽減することができる。現在、一般に多く行われている内視鏡手術においては、患部の画像が手術台に設置された大型モニターに映し出され、執刀医とその助手をはじめ、麻酔医や看護師などから構成される手術スタッフは、当該モニターを見ながら手術を行う。しかしながら、モニターに映し出される2D画像から患部の「奥行き」を正確に感じとることは難しく、空間認識の点から見れば、直接的に患部を目視することができる開腹手術に劣るといわざるを得なかった。
【0003】
この点につき、最近、3D画像システムを適用した立体内視鏡システムが種々検討されている。立体内視鏡システムにおいて、手術スタッフは、患部の3D画像を見ながら手術することができる。特開2007−044153号公報(特許文献1)は、そのような立体内視鏡装置を開示する。
【0004】
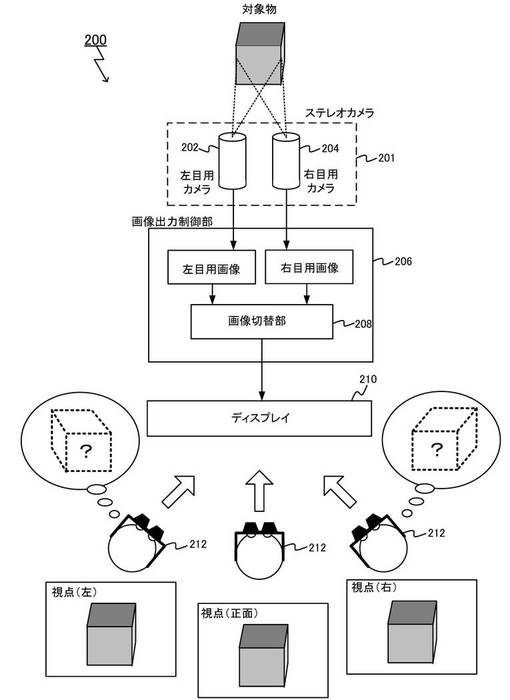
ここで、現在最も多く用いられている眼鏡式立体内視鏡システムの原理について説明する。図20は、眼鏡式立体内視鏡システム200を示す。眼鏡式立体内視鏡システム200は、内視鏡スコープの先端にステレオカメラ201を備え、配置された2つのCCDカメラ(左目用カメラ202・右目用カメラ204)が対象物の左目用画像および右目用画像をそれぞれ撮像して画像出力制御部206に送信する。画像出力制御部206においては、画像切替部208がフレームシーケンシャル方式に則って左目用画像と右目用画像を交互に出力し、ディスプレイ210が左目用画像と右目用画像を交互に表示する。一方、手術スタッフは、専用の3Dメガネ212を装着した状態で、ディスプレイ210に表示される画像を見る。ここで、3Dメガネ212は、左目用画像と右目用画像の切り替えに同期して左右の視界を交互に遮断する液晶シャッターを備えているため、左目用画像は左目だけに見え、右目用画像は右目だけに見える。その結果、手術スタッフは、その脳内で左右の画像を合成し、対象物の立体イメージを得る。
【0005】
しかしながら、上述した眼鏡式立体内視鏡システムを用いる手術スタッフについて、専用の3Dメガネに起因する肉体的・精神的ストレスが報告されている。アクティブシャッター特有のフリッカー現象に伴う眼精疲労や重量のある特殊なメガネを長時間装着することに伴う精神的ストレスなどはその一例である。さらに、眼鏡式立体内視鏡システムにおいて、単一視点のステレオ画像が映し出されることに起因する問題がある。すなわち、複数の手術スタッフがディスプレイ210を見ながら手術を行う場合、ディスプレイ210を正面から見る手術スタッフにおいては、実際の視点と画像の視点が一致するので問題はないが、ディスプレイ210を左側あるいは右側から見る手術スタッフにおいては、実際の患部の奥行きと画像から感受される奥行き感が一致せず、このことがバーチャルリアリティ酔い(VR酔い)の原因となっていた。外科手術においては、長時間にわたり細心の注意力と高度な集中力が要求されるため、手術環境からストレスの原因を出来る限り排除しなければならない。
【0006】
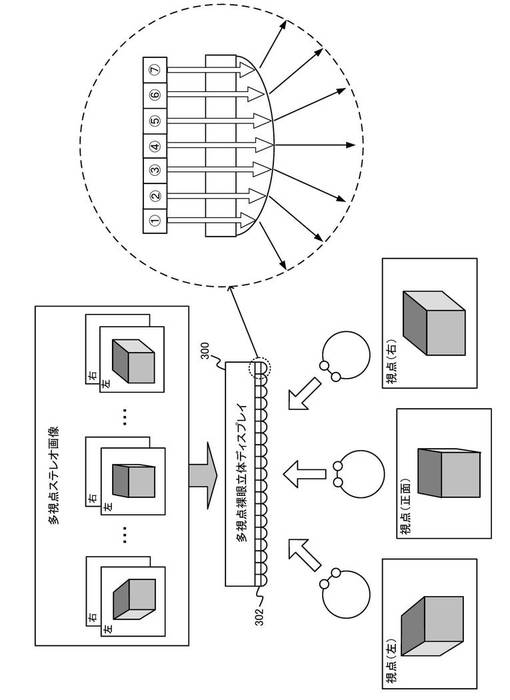
上述した点に関し、近年、マルチビューの裸眼立体ディスプレイ装置の実用化が進んでいる。特開2005−86414号公報(特許文献2)は、そのような多視点裸眼立体ディスプレイ装置を開示する。図21は、多視点裸眼立体ディスプレイ装置の機構を説明するための概念図である。多視点裸眼立体ディスプレイ装置300は、多眼方式やインテグラルフォトグラフィー方式などの古くから知られる立体写真技術を応用したものであり、レンチキュラーレンズアレイ302を用いることによって、裸眼による立体視と多視点を同時に実現している。
【0007】
図21の右側に破線で囲んで示すように、多視点裸眼立体ディスプレイ装置300においては、複数のピクセル(図21に示す例においては7つのピクセル)が1単位として1つのレンチキュラーレンズ内に収められている。なお、各ピクセルは、縦方向(紙面に垂直方向)に並んだ図示しない3つのサブピクセル(RGB)からなる。各ピクセルの光はレンチキュラーレンズによって屈折し、別々の方向に放射線状に出射する。この多重化されたピクセルとレンチキュラーレンズを組み合わせることによって、複数の異なる視点に対応付けられた複数のステレオ画像を集約してディスプレイ上に同時に表示することができる。
【0008】
なお、多視点裸眼立体ディスプレイ装置300に表示させるための多視点ステレオ画像は、3次元コンピュータグラフィックス(3DCG)によって作成することができる。たとえば、7つの視点に対応する7組のステレオ画像(左目用画像および右目用画像の組)を3DCGによって作成する場合、予め形状データを定義したオブジェクトを仮想3次元空間に配置した上で、7組の仮想的なカメラ視点を設定し、各カメラ視点を原点とする仮想スクリーンに透視投影した場合のオブジェクトの2次元画像を計算によって求めて生成する(レンダリング)。なお、1視点に対応するステレオ画像は、左目視点に対応する画像と右目視点に対応する画像からなるので、都合、7×2=14の2次元画像を算出する必要がある。
【0009】
上述した手順で生成された14の2次元画像を構成する各画素データは、左目用画像および右目用画像が適切な視差を持つように、且つ、それぞれが予め定義された視点で結像するように、適切なピクセル座標が計算され割り当てられる。その結果、各視点に対応付けられたステレオ画像が当該視点に位置するユーザの左右の目に振り分けられて結像し、且つ、ユーザの視点移動に合わせてユーザの左右の目に結像するステレオ画像が遷移する。上述した機構によって裸眼による多視点立体視が実現される。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2007−044153号公報
【特許文献2】特開2005−86414号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
本発明は、上記従来技術における課題に鑑みてなされたものであり、本発明は、立体内視鏡システムに特有のストレスから手術スタッフを解放するとともに、質の高い施術を支援することができる新規な立体内視鏡システムを提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明者は、立体内視鏡システムに特有のストレスから手術スタッフを解放するとともに、質の高い施術を支援することができる立体内視鏡システムにつき鋭意検討した結果、撮像対象の奥行値とRGB値を関連付けた3Dデータに基づいて、複数の仮想的な視点に対応する複数のステレオ画像をリアルタイムに生成し、これを既存の多視点裸眼立体ディスプレイ装置に表示させることによって、患部の実写映像の多視点裸眼立体視が可能になることを見出し、本発明に至ったのである。
【0013】
すなわち、本発明によれば、ステレオカメラと、該ステレオカメラによって取得されたステレオ画像に基づいて多視点ステレオ画像を生成する多視点ステレオ画像生成部と、該多視点ステレオ画像を表示するための多視点裸眼立体ディスプレイとを含む立体内視鏡システムであって、多視点ステレオ画像生成部は、前記ステレオカメラによって取得されたステレオ画像の画素毎の奥行値とRGB値を対応付けた3Dデータを生成する3Dデータ生成部と、前記3Dデータに基づいて複数の仮想的な視点に対応する複数のステレオ画像が集約してなる多視点ステレオ画像を描画するレンダリング部とを含む立体内視鏡システムが提供される。
【0014】
さらに、本発明によれば、ステレオ画像の各画素について視差を取得するために動的計画法に基づいてステレオマッチングを行う方法であって、注目画素を含んで縦方向に連続する複数の画素を輝度値取得領域として定義し、該複数の画素の各画素について算出した輝度距離の平均値またはその累乗根を前記ステレオマッチングにおけるコストとして定義することを特徴とする方法が提供される。本発明においては、前記輝度値取得領域をエッジにまたがって延在しないように動的に定義し、前記ステレオマッチングにおける斜め経路選択の重み係数が前記輝度距離の平均値の大きさに応じて大きくなるように設定することを好ましい。さらに、本発明においては、前記ステレオ画像において対象となる走査線を所定間隔毎に定義して該走査線上の各画素の視差を前記ステレオマッチングによって取得した上で、縦方向に存在する視差取得済みの2つの画素の間に位置する画素について、前記2つの画素の視差が変化しない場合には、前記2つの画素の間に位置する画素に前記2つの画素の視差を承継させ、前記2つの画素の視差が変化する場合には、前記2つの画素の間に位置する画素についてのみ新たに前記ステレオマッチングを行って視差を取得するといった一連の処理を実行することが好ましく、前記一連の処理を前記ステレオ画像の全画素の視差が取得されるまで再帰的に繰り返すことが好ましい。
【発明の効果】
【0015】
上述したように、本発明によれば、立体内視鏡システムに特有のストレスから手術スタッフを解放するとともに、質の高い施術を支援することができる新規な立体内視鏡システムが提供される。本発明によれば、開放的な環境において、一斉に多人数が特別な観察道具に接触することなく、対象について連続的多視点から奥行感をつかむことができる。
【図面の簡単な説明】
【0016】
【図1】本実施形態の多視点裸眼立体内視鏡システムの機能ブロック図。
【図2】ステレオ視計測の基本原理を説明するための概念図。
【図3】ステレオ視計測の基本原理を説明するための概念図。
【図4】ステレオ視計測の基本原理を説明するための概念図。
【図5】単一画素の輝度距離をコストとする従来のDPマッチングの概念図。
【図6】本実施形態における輝度値取得領域を説明するための概念図。
【図7】本実施形態における輝度値取得領域を説明するための概念図。
【図8】本実施形態における輝度値取得領域を説明するための概念図。
【図9】本実施形態における輝度値取得領域を決定する処理を示すフローチャート。
【図10】大きな色の差の影響を低減する処理を説明するための概念図。
【図11】本実施形態における視差承継処理を説明するための概念図。
【図12】本実施形態における視差承継処理を示すフローチャート。
【図13】視差計測実験に用いた4組のステレオ画像を示す図。
【図14】ステレオ画像「Cones」について得られた結果を示す図。
【図15】ステレオ画像「Teddy」について得られた結果を示す図。
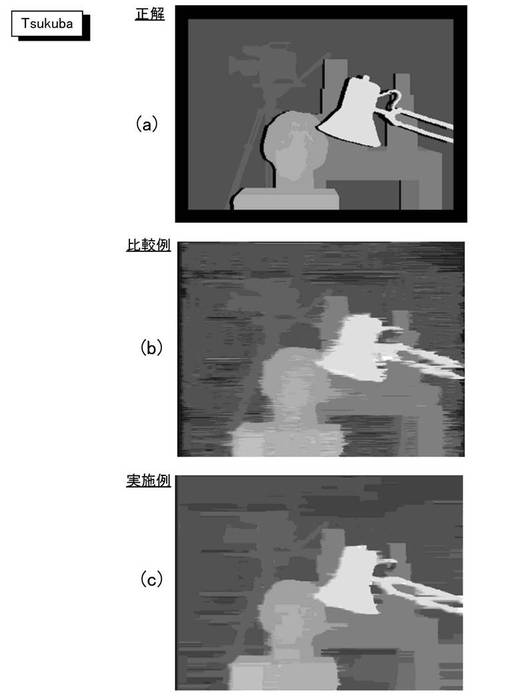
【図16】ステレオ画像「Tsukuba」について得られた結果を示す図。
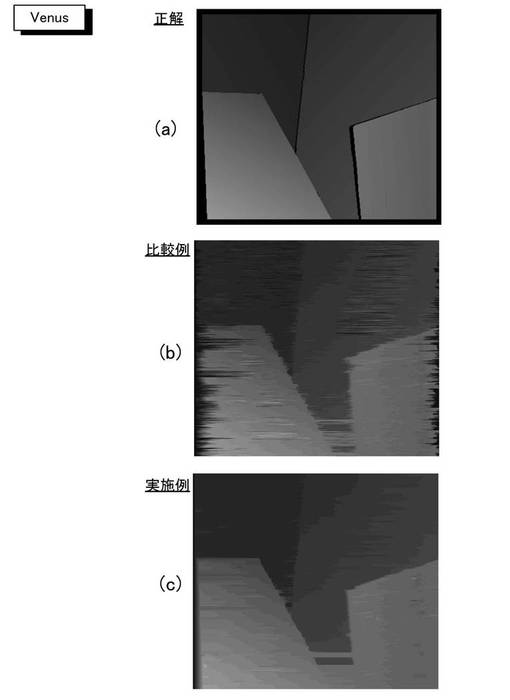
【図17】ステレオ画像「Venus」について得られた結果を示す図。
【図18】パラメータαとMDE/Sの平均値との関係を示す図。
【図19】パラメータαと正解率[%]の平均値との関係を示す図。
【図20】従来の眼鏡式立体内視鏡システム示す図。
【図21】多視点裸眼立体ディスプレイ装置の機構を説明するための概念図。
【発明を実施するための形態】
【0017】
以下、本発明を図面に示した実施の形態をもって説明するが、本発明は、図面に示した実施の形態に限定されるものではない。なお、以下に参照する各図においては、共通する要素について同じ符号を用い、適宜、その説明を省略するものとする。
【0018】
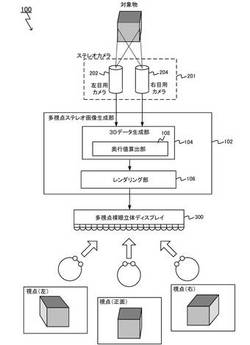
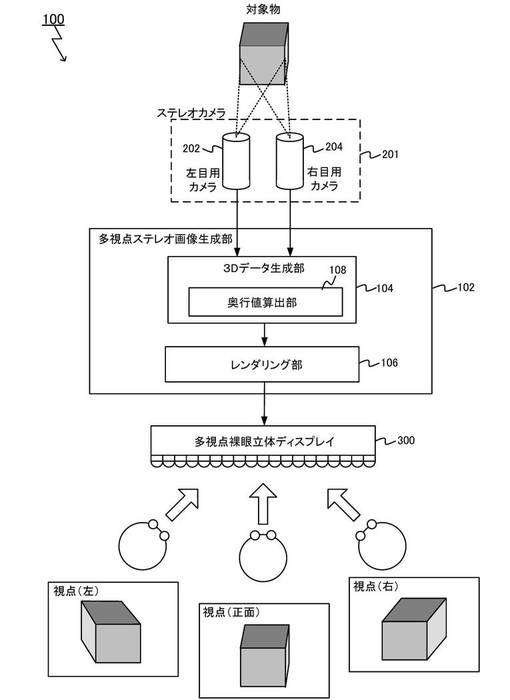
図1は、本発明の実施形態である多視点裸眼立体内視鏡システム100の機能ブロック図を示す。本実施形態の多視点裸眼立体内視鏡システム100は、ステレオカメラ201と、多視点ステレオ画像生成部102と、多視点裸眼立体ディスプレイ300とを含んで構成されている。
【0019】
ステレオカメラ201は、既存の立体内視鏡用カメラとして参照することができる。2つのCCDカメラ(左目用カメラ202・右目用カメラ204)がそれぞれ撮像した対象物の左目用画像および右目用画像は、多視点ステレオ画像生成部102の3Dデータ生成部104に送信される。3Dデータ生成部104においては、受信した左目用画像および右目用画像に基づいて3Dデータが生成される。なお、本発明における3Dデータとは、画素毎に定義される情報であって、奥行値とRGB値を対応付けた情報をいう。
【0020】
レンダリング部106は、3Dデータ生成部104が生成した3Dデータに基づいて、複数の仮想的な視点に対応する複数のステレオ画像をレンダリングする。具体的には、レンダリング部106は、3Dデータに含まれる奥行値に基づいて、実空間上の座標系の対象物(患部)の3次元座標値を計算により取得する。さらに、取得した3次元座標値に基づいて複数の仮想的な視点に対応する複数のステレオ画像をレンダリングし、レンダリングした各画像について適切なピクセル座標を割り当てて集約する。その結果、複数の仮想的な視点に対応する複数のステレオ画像が集約した1枚の多視点ステレオ画像が描画される。レンダリング部106が生成した多視点ステレオ画像は、多視点裸眼立体ディスプレイ300に送信され表示される。
【0021】
本実施形態の多視点裸眼立体内視鏡システム100によれば、手術スタッフは専用のメガネを装着する必要がないため、開放的な環境下で施術することができる。また、本システムにおいては、どの方向からディスプレイ300を見た場合でも、実際の対象の奥行きと画像から感受される奥行き感が一致するので、複数の手術スタッフが施術する場合であってもVR酔いになることがない。また、視点を左右上下に少しずつ変えることによって運動視差が得られるため、単一視点の立体映像を観察する場合に比較して、対象物(患部)についてより自然な奥行き感を感受することが可能になる。このことは、施術の精度の向上に少なからず寄与するであろう。
【0022】
以上、説明したように、従来の眼鏡式立体内視鏡システムにおいては、対象物(患部)について取得した単一視点のステレオ画像(左目用画像および右目用画像)をそのままの形で交互にディスプレイに表示することによって、単一視点の立体視を実現していたのに対し、本実施形態の多視点裸眼立体内視鏡システム100においては、対象物(患部)について取得した単一視点のステレオ画像から、一旦、計算によって3Dデータを生成した上で、当該3Dデータに基づいて複数の仮想的な視点に対応する複数のステレオ画像を再構築し、当該複数のステレオ画像を集約した1枚の多視点ステレオ画像として表示させることによって、患部の実写映像の多視点裸眼立体視を実現することを特徴とする。
【0023】
ここで、本システムの実用化のためには、まず第1に、複数の仮想的な視点に対応する複数のステレオ画像を再構築する際の根拠となる3Dデータにおける奥行値を高精度に算出する必要がある。誤った奥行値からは正しい奥行き感を反映したステレオ画像を再現できず、結果的に患部の観察精度が低下するからである。第2に、患部の実写動画をリアルタイムで表示する必要があるため、奥行値の算出処理速度のリアルタイム性を担保しなければならない。本発明においては、上述した2つの課題をクリアするための手段が3Dデータ生成部104の奥行値算出部108に実装される。以下、本実施形態の多視点裸眼立体内視鏡システム100における特徴的な構成である奥行値算出部108の構成について、順を追って詳細に説明する。
【0024】
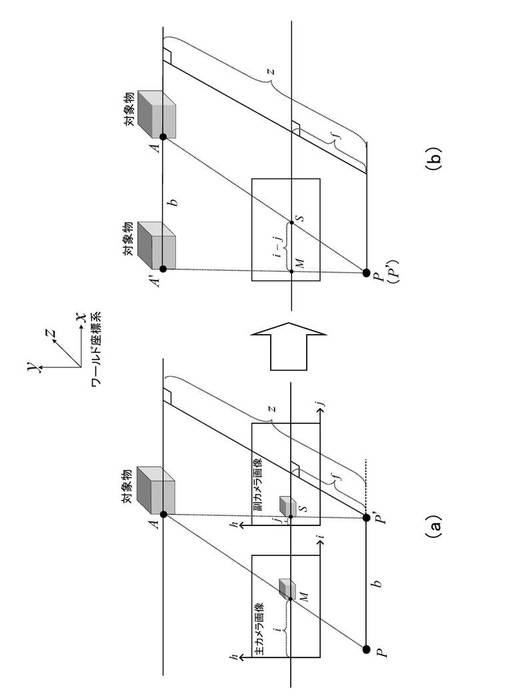
本実施形態における奥行値算出部108の説明に入る前に、ステレオ画像から奥行値を取得する際に用いるステレオ視計測の基本原理を説明しておく。なお、以降の説明において、上述した「左目用カメラ」および「右目用カメラ」を「主カメラ」および「副カメラ」として参照する。図2は、ステレオ視計測の基本原理を説明するための概念図である。図2においては、実空間上の座標系(ワールド座標系)の3次元座標(x,y,z)に対して、主カメラ画像上の2次元座標(i,h)および副カメラ画像上の2次元座標(j,h)が定義されており、カメラをピンホールカメラとしてモデル化したうえで、主カメラの焦点をP、副カメラの焦点をP’、両カメラの焦点間の距離(基線長)をb、焦点からスクリーン(各カメラ画像)までの距離(焦点距離)をfとして示している。なお、焦点距離fは、カメラをピンホールカメラとしてモデル化した場合に適切な値となるように、事前のカメラ校正で求めておく。
【0025】
ここで、図2(a)に示すように、対象物上の任意の点Aの主カメラ画像上の投影点をM,点Aの副カメラ画像上の投影点をSとし、副カメラの焦点P’および副カメラ画像をx軸方向に平行移動して、主カメラの焦点Pおよび主カメラ画像に完全に重ねると、図2(b)に示す位置関係が得られる。ここで、ステレオ視計測における視差は、主カメラ画像上の投影点M(i,h)と副カメラ画像上の投影点S(j,h)の離間距離(i-j)として求めることができる。ここで、図2(b)に示す三角形PAA’と三角形PSMは相似の関係にあるので、下記式(1)が成立する。
【0026】
【数1】

【0027】
上記式(1)を変形すると、下記式(2)が得られる。
【0028】
【数2】
【0029】
上記式(2)によれば、視差(i-j)を求めることによって、対象物上の任意の点Aまでの距離Z(すなわち、奥行値)を導出できることが理解され、その結果、奥行値の算出処理の速度が視差(i-j)の算出処理の速度に依存することが理解されるであろう。ここで、カメラの取得画像がRGBデジタル画像である場合、投影点Mおよび投影点Sは、RGBデジタル画像の画素Mおよび画素Sに置き換えることができるので、視差(i-j)の算出処理は、実質的に、画素Mおよび画素Sの座標値を求める処理と等価であるということができる。
【0030】
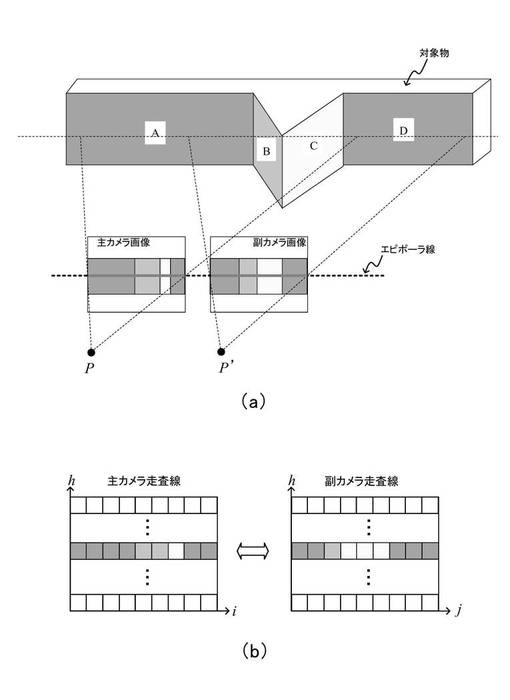
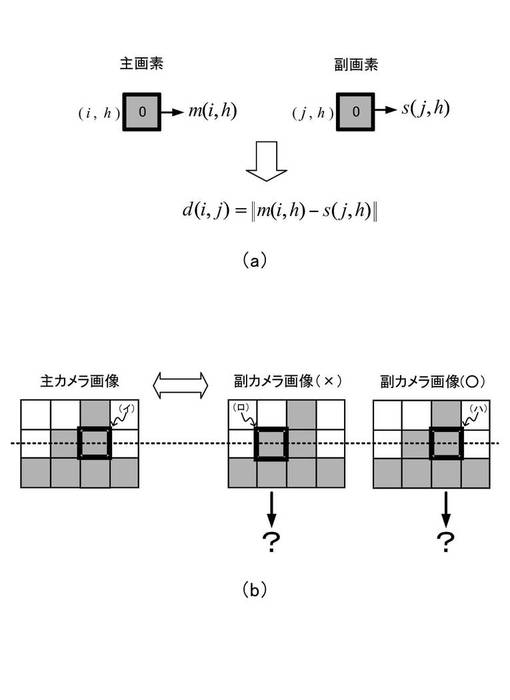
図3(a)は、対象物を撮像した際の主カメラ画像および副カメラ画像を示す。ステレオ視計測装置においては、主カメラおよび副カメラが平行等位に配置されているので、主カメラ画像上の画素(以下、主画素という)に対応する副カメラ画像上の画素(以下、副画素という)は、同じ高さにある走査線上に存在するはずである。したがって、対象物上の任意の点に対応する主カメラ画像上の画素Mおよび副カメラ画像上の画素Sの正しい組み合わせを取得することは、図3(b)に示すように、同じ高さの(すなわち、h座標値が等しい)走査線上の2つの画素群のマッチング問題(いわゆるステレオマッチング)に帰着することが理解されるであろう。
【0031】
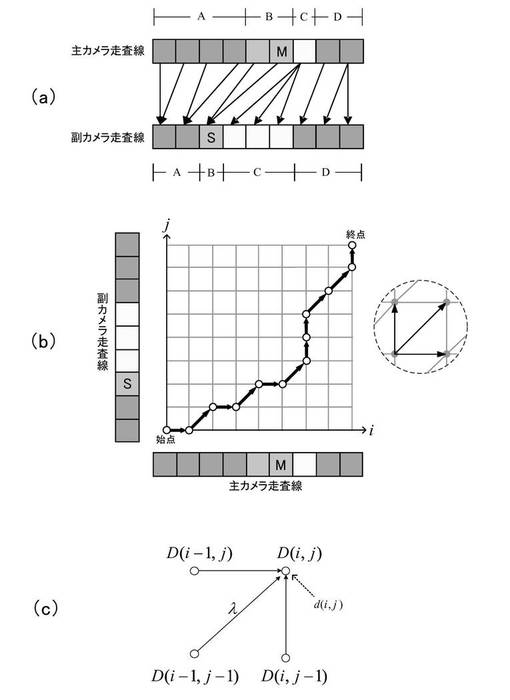
図4(a)は、図3(b)に示した主カメラ走査線と副カメラ走査線との間でステレオマッチングを行った結果を示す。図4(a)においては、主画素と副画素のマッチング結果を矢線で示している。
【0032】
また、図4(b)は、主カメラ走査線上の画素群と副カメラ走査線上の画素群の間のマッチング問題を解くためのマトリックスを示す。マトリックスの縦軸および横軸は、それぞれ、副カメラ画像のj座標軸および主カメラ画像のi座標軸に対応しており、マトリックスの各交点は、主画素と副画素の組に対応している。
【0033】
マトリックスの各交点には、マッチングにおけるコストとして、当該交点に対応する主画素と副画素の間の輝度値の差の絶対値(以下、輝度距離という)が付与されている。ここで、同一の対象点Aが写り込んだ正しい画素の組み合わせ(すなわち、画素Mおよび画素S)は、輝度値の差が最も小さい画素の組み合わせと考えることができる。したがって、上述したマッチング問題は、図4(b)に示したマトリックスにおいて、左下の始点から右上の終点に至るパスのうち、パス上の各交点に付与されたコスト(輝度距離)の総和が最も小さくなる最適パスの探索問題に置き換えることができる。この探索問題は、以下の理由により、動的計画法に基づくステレオマッチング(以下、DPマッチングという)によって処理することができる。
【0034】
すなわち、図4(a)に示されるように、仮に、画素Mと画素Sを正しい組み合わせとすれば、その余の正しい組み合わせにおいて、画素Mよりも左側に存在する画素は、画素Sよりも左側に存在する画素と組み合うはずである。このことを図4(b)に示すマトリックスに照らして考えれば、画素Mと画素Sの組み合わせの直前の正しい組み合わせ(交点)は、必ず画素Mと画素Sの交点から見て、左、下、斜め左下の3つのうちのいずれかに存在することを意味する。つまり、画素Mと画素Sの正しい組み合わせに至るまでの最適な組み合わせの列として、画素Mと画素Sの交点から見て、左、下、斜め左下の3つの各交点に至る3つの組み合わせの列の中から最適なものを選べばよいことになる。
【0035】
図4(b)に示すマトリックスを用いたDPマッチングにおいて、マトリックスの交点(i,j)に至る最適パスの総コストD(i,j)は、下記式(3)で表すことができる。なお、下記式(3)において、d(i,j)は、マトリックスの交点(i,j)に付与された輝度距離(コスト)を示し、D(i-1,j)、D(i-1,j-1)、D(i,j-1)は、交点(i,j)の直前の交点(i-1,j)、交点(i-1,j-1)、交点(i,j-1)に至るそれぞれの最適パスの総コストを示し、λは、斜めの経路を選択する重み係数を示す。
【0036】
【数3】
【0037】
DPマッチングにおいては、図4(c)に示すように、直前に求められたD(i-1,j)、D(i-1,j-1)、D(i,j-1)と、d(i,j)と、重み係数λを上記式(3)に代入し、最小値minを与えるものを最適パスとして選択するといった処理を図4(b)に示すマトリックスの始点から終点に至るまで繰り返すことによって、始点から終点に至るパスのうち、パス上の各交点に付与されたコスト(輝度距離)の総和が最も小さくなる最適パスを決定することができる。
【0038】
以上、DPマッチングを用いたステレオ視計測の原理について説明してきたが、次に、本実施形態の多視点裸眼立体内視鏡システム100における奥行値算出部108が備える特徴的な構成について説明する。本実施形態における奥行値算出部108の特徴は、上述した従来のステレオ視計測におけるDPマッチング方法を改良した新規なDPマッチング方法を採用する点にある。すなわち、本実施形態における新規なDPマッチング方法においては、まず第1に、正解率の向上のために、DPマッチングにおけるコストを新たに定義する。第2に、DPマッチングの正解率の向上のために、斜め経路選択の重み係数λを適応的に決定する構成を採用する。さらに、本実施形態における奥行値算出部108は、第3に、処理の高速化のために、マッチング処理の省略化のための構成を採用する。以下、上述した第1〜第3の各内容につき、順を追って詳細に説明する。
【0039】
(DPマッチングにおける新たなコスト定義の導入について)
従来のステレオ視計測におけるDPマッチングにおいては、図5(a)に示すように、注目する主画素(i,h)の輝度値m(i,h)と、これと照合する副画素(j,h)の輝度値s(j,h)の差の絶対値を輝度距離d(i,j)とし、この輝度距離d(i,j)をDPマッチングにおけるコストとして定義するものであった。しかしながら、このような単一の画素についての輝度距離をコストとする方法では、ノイズの影響を大きく受けざるを得ず、このことがマッチング正解率を低下させていた。さらに、単一の画素についての輝度距離をコストとする方法では、走査線上に同じ色(すなわち、同じ輝度値)の画素が続く領域において曖昧さを排除することができず、マッチング正解率の向上に限界があった。この点について、図5(b)を参照して説明する。
【0040】
図5(b)は、単一の画素の輝度距離に基づくマッチングを示す。ここで、副カメラ画像上の画素(ロ)および画素(ハ)の輝度値が等しい場合、主カメラ画像の注目画素(イ)と副カメラ画像上の画素(ロ)の輝度距離は、主カメラ画像の注目画素(イ)と副カメラ画像上の画素(ハ)の輝度距離と等しくなって曖昧さが残る。このような従来法の問題点につき、本発明は、注目画素を含む複数の画素の輝度値を利用してコストを定義することによってこれを解決する。以下、この点について、図6を参照して説明する。
【0041】
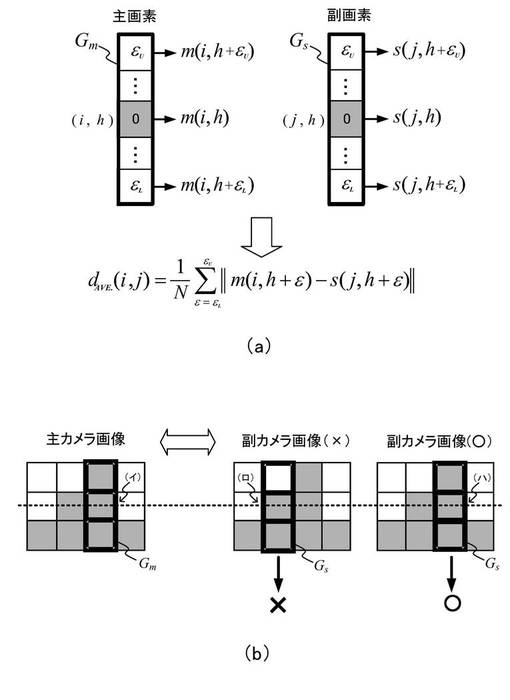
本発明においては、注目画素を含んで縦方向(h軸方向)に連続する複数の画素を輝度値取得領域として定義する。具体的には、図6(a)の左側に太線で囲んで示すように、注目する主画素(i,h)を基準(0)として、走査線に対して垂直なh座標軸の正方向εU番目の画素を上端画素とし、h座標軸の負方向εL番目(εLは負の値とする)の画素を下端画素とする画素群を特定し、これらを輝度値取得領域Gmとして定義する。同様に、マッチング対象となる副画素(j,h)を基準(0)として、h座標軸の正方向にεU番目の画素を上端画素とし、h座標軸の負方向にεL番目の画素を下端画素とする画素群を特定し、これらを輝度値取得領域Gsとして定義する。すなわち、輝度値取得領域Gsは輝度値取得領域Gmと同じ大きさに定義される。
【0042】
本発明においては、輝度値取得領域Gmに含まれる各画素について算出した輝度距離の平均値を領域平均輝度距離dAVE.とし、この領域平均輝度距離dAVE.をDPマッチングにおけるコストとして定義する。領域平均輝度距離dAVE.を下記式(4)に示す。なお、下記式(4)において、εはh座標の加算値を示し、Nは輝度値取得領域Gを構成する画素数(εU−εL+1)を示し、mは主画素の輝度値を示し、sは副画素の輝度値を示す。
【0043】
【数4】
【0044】
本発明がDPマッチングにおけるコストとして領域平均輝度距離dAVE.を採用することには以下の利点がある。まず第1に、本発明は、注目画素に対して当該注目画素を含む複数の画素について算出した輝度距離の平均値を値として持たせる構成を採用するので、仮に、左右のカメラの受光量の差異やCCD素子の感度の違いに起因するノイズが当該注目画素に含まれていたとしても、輝度距離の平均化によってノイズの影響が平準化され、その結果、ノイズに起因するマッチング正解率の低下が抑止される。第2に、領域平均輝度距離dAVEを求める際の輝度値取得領域Gを規定するεUおよびεLの値は、対象の形状に応じて動的に決定されるため、このような領域平均輝度距離dAVEを用いたマッチングは、実質的に、注目画素近傍の空間情報を利用するものとなり、その結果、単一画素を用いる場合に比較してマッチング正解率が格段に向上する。以下、この点について、図6(b)を参照して説明する。
【0045】
図6(b)は、領域平均輝度距離dAVEをコストとするマッチングを示す。図6(b)に示す例においては、副画素(ロ)を含む輝度値取得領域Gsは、副画素(ロ)の上に副画素(ロ)と色の異なる画素を含んでいるため、注目画素(イ)と副画素(ロ)の領域平均輝度距離dAVEは、注目画素(イ)と副画素(ハ)の領域平均輝度距離dAVEよりも大きくなる。その結果、副カメラ画像の画素(ハ)を正解として選出することが可能になる。なお、図6(b)は、理解の容易のため、輝度値取得領域Gs内の色が大きく異なる例を示したが、仮に、輝度値取得領域G内の画素の色が同色であったとしても、領域内の画素の輝度値にはある程度の分散が見込めるため、上述した効果を得ることができる。
【0046】
次に、本発明において、最適な輝度値取得領域Gを動的に設定する構成を採用することによって、マッチング正解率をさらに向上させることができる点について説明する。
【0047】
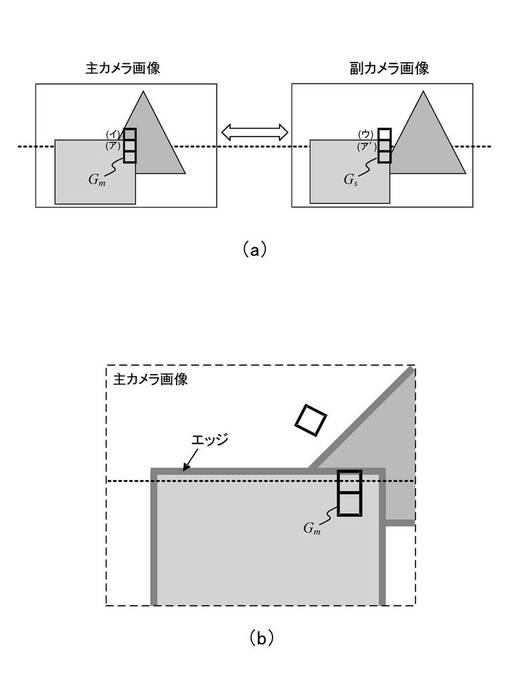
図7(a)は、2つの対象物を撮像した際の主カメラ画像および副カメラ画像を示す。図7(a)に示す例においては、輝度値取得領域Gmの大きさは固定されているものとする。ここで、四角形の対象物が写り込んだ主画素(ア)を注目画素とした場合、輝度値取得領域Gm内の画素(イ)には、背後の三角形の対象物が写り込む一方で、主画素(イ)に対応する輝度値取得領域Gs内の副画素(ウ)には、背後の三角形の対象物が写り込まず、背景が写り込むといったことが起こる。このような場合、主画素(ア)と副画素(ア’)の領域平均輝度距離dAVEが大きくなり、その結果、両者の組み合わせが正解として判断されない虞が生じる。つまり、輝度値取得領域Gmの大きさの設定如何によっては、返ってノイズを拾ってしまうことになり、マッチング正解率を低下させてしまうことになりかねない。この点につき、本発明は、図7(b)に概念的に示すように、主カメラ画像に写り込んだ対象物のエッジを基準にして、当該エッジにまたがって延在しないような輝度値取得領域Gmを動的に設定することによって、ノイズを拾うことを防止してマッチング正解率を向上させる。以下、輝度値取得領域Gの動的設定について詳細に説明する。
【0048】
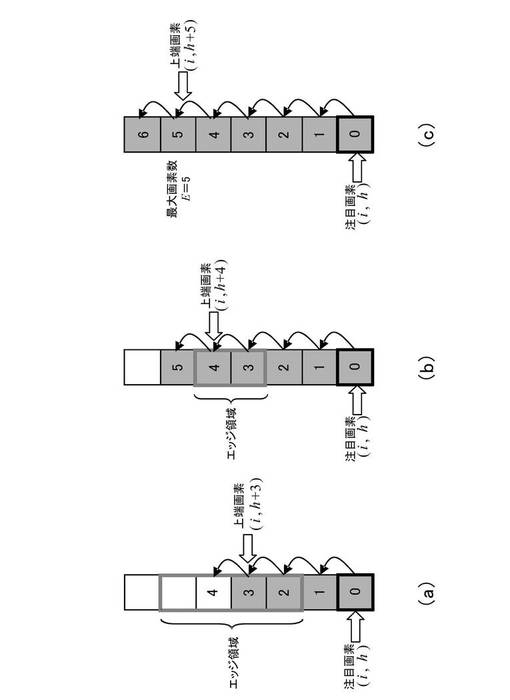
本発明において、輝度値取得領域Gを設定することは、すなわち、輝度値取得領域Gの上端画素および下端画素を決定することと同義である。以下、輝度値取得領域Gの上端画素を決定する場合を例にとって説明する。本発明においては、注目画素(i,h)から見てh座標軸上方向のエッジ領域上にある画素を上端画素として決定する。注目画素(i,h)から見て、h座標軸上方向に存在する画素およびエッジ領域上が図8(a)に示されるような態様である場合、エッジ領域上の画素であって、注目画素(i,h)から見て色が大きく変化しない最上位の画素(i,h+3)が上端画素として決定される。また、注目画素(i,h)から見てh座標軸上方向に存在する画素およびエッジ領域上が図8(b)に示されるような態様である場合、色の変化よりもエッジが優先され、エッジ領域内の最上位の画素(i,h+4)が上端画素として決定される。なお、図8(c)に示すように、注目画素(i,h)近傍にエッジ領域が存在しない場合には、予め定められた最大画素数E(h座標の最大加算値E)をもって上端画素を決定する。図8(c)に示す例においては、E=5と定められているので、画素(i,h+5)が上端画素として決定される。
【0049】
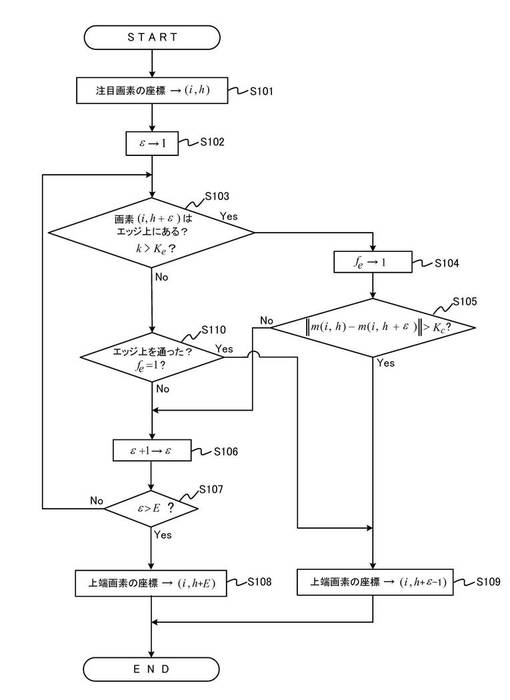
上述した輝度値取得領域Gの上端画素を決定する処理を図9に示したフローチャートに基づいて説明する。まず、注目する主画素の座標値(i,h)をセットし(ステップ101)、h座標の加算値εを「1」とする(ステップ102)。次に、画素(i,h+ε)がエッジ領域上にあるか否かを判断する(ステップ103)。ここで、画素(i,h+ε)がエッジ領域上にあるか否かの判断は、以下の手順で実行することができる。
【0050】
まず、画素(i,h+ε)を基準として、下記式(5)に示す、i軸方向の輝度変化量ηおよびh軸方向の輝度変化量ζをSobelフィルタを用いて求める。なお、下記式(5)において、mは主画素の輝度値を示す。
【0051】
【数5】
【0052】
次に、画素(i,h+ε)について求めたηおよびζを下記式(6)に代入して求まる値を画素(i,h+ε)における輝度変化量kとし、輝度変化量kが予め定めた閾値Keを超える場合に、当該画素(i,h+ε)がエッジ領域上にあると判断する。
【数6】
【0053】
画素(i,h+ε)がエッジ領域上にあると判断される場合には(ステップ103,Yes)、ステップ104に進んでエッジフラグfeを立てた後に、注目画素(i,h)の輝度値m(i,h)と画素(i,h+ε)の輝度値の差の絶対値(輝度距離)が予め定めた閾値KCを超えるか否かを判断する(ステップ105)。輝度距離が閾値KCを超えない場合には(ステップ105,No)、ステップ106に進んでh座標の加算値εを「1」インクリメントした後に、加算値εが予め定められたh座標の最大加算値E(最大画素数E)を超えたか否かが判断される(ステップ107)。加算値εが最大加算値Eを超えている場合(ステップ107,Yes)、画素(i,h+E)を上端画素として定義して処理を終了する(ステップ108)。
【0054】
加算値εが最大加算値Eを超えていない場合(ステップ107,No)、ステップ103に戻り、前回判断した画素の一つ上の画素(i,h+ε)がエッジ領域上にあるか否かを判断する。以降、ステップ104→ステップ105→ステップ106→ステップ107→ステップ103の処理が繰り返されるごとに、判断対象となる画素のh座標が1ずつ繰り上がる。
【0055】
その間、ステップ105において、輝度距離が閾値KCを超えた場合には(ステップ105,Yes)、現在の画素(i,h+ε)の1つ手前の画素(i,h+ε-1)を上端画素として定義し(ステップ109)、処理を終了する。一方、画素(i,h+ε)がエッジ領域上に無い場合には(ステップ103,No)、エッジフラグが立っているか否かを判断する(ステップ110)。エッジフラグが立っている場合(ステップ110,Yes)、エッジ領域を超えたと判断し、現在の画素(i,h+ε)の1つ手前の画素(i,h+ε-1)を上端画素として定義して処理を終了する(ステップ109)。エッジフラグが立っていない場合(ステップ110,No)、ステップ106に進んで、先に説明したようにh座標の加算値εが「1」インクリメントされ、以降の処理が繰り返される。
【0056】
本発明においては、上述したのと同様の手順で輝度値取得領域Gの下端画素を決定した上で、上端画素から下端画素に至る複数の画素群を輝度値取得領域Gとして動的に設定する。以上、本発明におけるDPマッチングのコストについて説明してきたが、本発明においては、領域平均輝度距離dAVE.をマッチングコストとする構成に代えて、領域平均輝度距離dAVE.の累乗根をマッチングコストとする構成を採用することによって、マッチング正解率をさらに向上させることができる。以下、この点について説明する。なお、以下の説明において、単一の画素について言及する部分は、輝度値取得領域Gについて言及するものとして置き換えて参照されたい。
【0057】
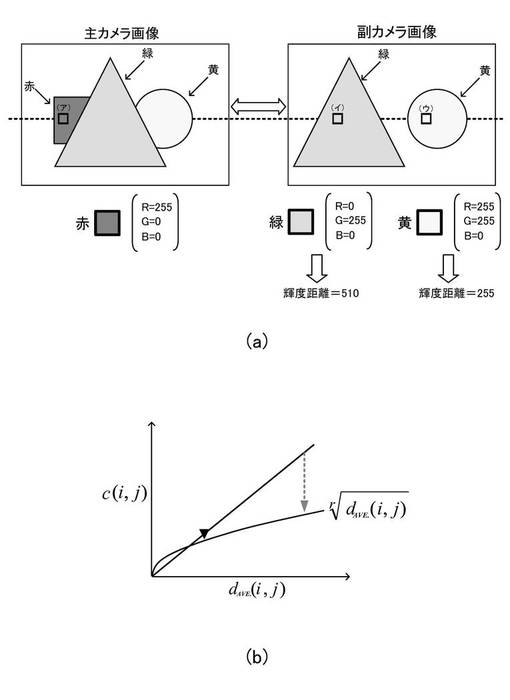
図10(a)は、色の異なる3つの対象物を撮像した際の主カメラ画像および副カメラ画像を示す。図10(a)に示す例においては、主カメラ画像には、赤色、緑色、および黄色の3つの対象物が写っているが、副カメラ画像においては、赤色の対象物が緑色の対象物の背後に隠れてしまっている。この場合、赤色の対象物が写り込んだ主画素(ア)を注目画素としたマッチングにおいては、副カメラ画像の走査線上に正解は存在せず、誤った組み合わせを決定せざるを得ない。すなわち、ステレオ視計測におけるDPマッチングは、その原理上、不適切なマッチングを完全に排除することはできないのである。
【0058】
このような場合、副カメラ画像の走査線上にある全ての副画素は、マッチングコストの観点から見て等価であることが望ましいが実際にはそうはならない。なぜならば、RGBデジタル画像の画素の輝度値は、R値、G値、B値からなる3次元ベクトル情報であるため、特に、補色の関係にある色の組み合わせの場合、各値の差分の総和である輝度距離が大きくなるからである。
【0059】
たとえば、赤色の対象物上の主画素(ア)の輝度値は、[R=255,G=0,B=0]であり、緑色の対象物上の副画素(イ)の輝度値は、[R=0,G=255,B=0]であり、黄色の対象物上の副画素(ウ)の輝度値は、[R=255,G=255,B=0]である。その結果、主画素(ア)と副画素(イ)の組に付与されるコスト(輝度距離=510)が主画素(ア)と副画素(ウ)の組に付与されるコスト(輝度距離=255)の2倍になるといったことが生じる。このような大きな色の違いに起因して生じるコストの大きな差は、最適パスの探索に悪影響を及ぼす場合がある。
【0060】
ここで、説明の便宜上、10個の画素からなる画素群のマッチングを想定する。第1のパスにおいては、10組の画素組のうち、7組の画素組が正解(コスト=1)であり、残りの3組の画素組が誤った組み合わせであって、誤った組み合わせのコストがそれぞれ「10」であったとする。一方、第2のパスにおいては、10組の画素組のうち、9組の画素組が正解(コスト=1)であり、残りの1組の画素組が誤った組み合わせであって、この誤った組み合わせに大きな色の違いがあったため、そのコストが「50」であったとする。この例の場合、第1のパスのコストの総和は「59」となり、第2のパスのコストの総和は「37」となる。その結果、正答率の高い第2のパスではなく、正答率の低い第1のパスが最適マッチングとして決定されるといったことが生じる。
【0061】
上述した問題点につき、本発明においては、先に説明した領域平均輝度距離dAVE.の累乗根をDPマッチングにおけるコストとして定義する。下記式(7)にコストc(i,j)を示す。なお、下記式(7)において、根rは固定値であり、適切な値を設定する。たとえば、本発明においては、根r=512〜1024とすることができる。
【0062】
【数7】
【0063】
図10(b)は、領域平均輝度距離dAVE.とコストc(i,j)の関係を示す図である。図10(b)に示されるように、領域平均輝度距離dAVE.をそのままコストc(i,j)として定義する場合には、当然のごとく領域平均輝度距離dAVE.に正比例してコストc(i,j)が増大するが、領域平均輝度距離dAVE.の累乗根をコストc(i,j)として定義する場合には、領域平均輝度距離dAVE.の値が小さい範囲においては、領域平均輝度距離dAVE.の増加に応じてコストc(i,j)が増大するが、領域平均輝度距離dAVE.の値が大きい範囲においては、コストc(i,j)の増加率が徐々に低下する。すなわち、領域平均輝度距離dAVE.の累乗根をDPマッチングにおけるコストとして定義することによって、不適切なマッチングを含むパスの総コストを適切に見積もることが可能になり、その結果、マッチング正解率をさらに向上させることができる。以上、本実施形態における奥行値算出部108が採用するDPマッチングにおけるコストの詳細について説明してきたが、続いて、奥行値算出部108の第2の特徴である、斜め経路選択の重み係数λを適応的に決定する構成について説明する。
【0064】
(斜め経路選択の重み係数λを適応的に決定する構成について)
本発明におけるDPマッチングにおいて、図4(b)に示したマトリックスの交点(i,j)に至る最適パスの総コストC(i,j)は、下記式(8)で表すことができる。なお、下記式(8)において、c(i,j)は、マトリックスの交点(i,j)に付与されたコスト(すなわち、上記式(7)に示した領域平均輝度距離dAVE.の累乗根)を示し、C(i-1,j)、C(i-1,j-1)、C(i,j-1)は、交点(i,j)の直前の交点(i-1,j)、交点(i-1,j-1)、交点(i,j-1)に至るそれぞれの最適パスの総コストを示し、λは、斜めの経路を選択する重み係数を示す。
【0065】
【数8】
【0066】
ここで、上記式(8)における斜め経路選択の重み係数λの値を大きく設定すれば、斜めの経路を採り難くなり、重み係数λの値を小さく設定すれば、斜めの経路を採り易くなる。従来のDPマッチングにおいては、この重み係数λを固定値としていたが、本発明においては、この重み係数λをマトリックスの交点(i,j)における領域平均輝度距離dAVE.の大きさに応じて適応的に変化させる。すなわち、本発明においては、上記式(8)における斜め経路選択の重み係数λ(固定値)に代えて、下記式(9)に示す重み係数λ(i,j)を採用する。なお、下記式(9)におけるwは固定値であり、適切な値を設定する。本発明においては、w=0.15〜0.35とすることができる。
【0067】
【数9】
【0068】
DPマッチングにおいては、注目画素に対して適切なマッチング対象が存在しない場合であっても、縦または横の経路を採ることによって、一つの画素に二つ以上の画素を対応させることで適切に処理することができるので、そのための追加的な処理をおこなう必要がない。ここで、パスが斜めの経路を取るか、あるいは、縦または横の経路を取るのかは、重み係数λ(i,j)の値に大きく依存する。したがって、本発明においては、この重み係数λ(i,j)を適応的に変化させることによって、マッチング正解率をさらに向上させるものである。すなわち、本発明においては、マトリックスの交点(i,j)に付与されたコストc(i,j)が大きいほど(つまり、注目画素に対して適切なマッチング対象が存在しない可能性が大きいほど)、重み係数λ(i,j)の値が大きくなるので、パスが縦または横の経路を採りやすくなるように構成されている。以上、斜め経路選択の重み係数λを適応的に決定する構成について説明してきたが、続いて、奥行値算出部108の第3の特徴である、マッチング処理の省略化について説明する。
【0069】
(マッチング処理の省略化について)
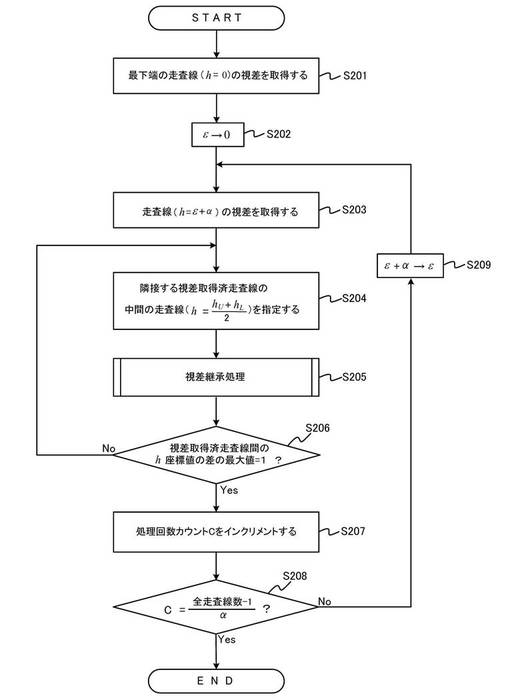
先に図3を参照して説明したように、ステレオ視計測におけるDPマッチングは、走査線ごとに独立して行われる。従来のステレオ視計測においては、たとえば、主カメラ画像の縦幅が300ピクセルの場合、全画素の視差を取得するために300回のDPマッチングが必要であった。この点につき、本発明は、視差に変化が無い画素領域が画像のh軸方向に多く存在する点に着目し、視差に変化が無いと推定される画素領域については、既に取得した視差を継承することによって処理量を大幅に削減することで処理時間のリアルタイム性を実現する。以下、その具体的な内容について図11および図12に示すフローチャートに基づいて説明する。
【0070】
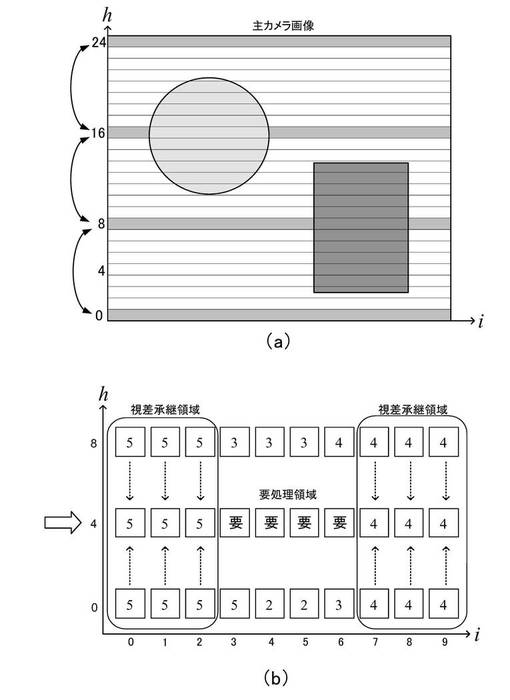
以下の説明は、図11(a)に示す主カメラ画像を例にとって説明する。なお、図11(a)に示す主カメラ画像は、25本(0〜24)の走査線を有しているものとする。
【0071】
まず、ステップ201において、一番下の走査線(h座標値=0)について通常のマッチング処理を実行し、画素毎の視差を取得する。視差の取得が完了した走査線は「視差取得済」とマークされる(以下、同様)。その後、ステップ202において、パラメータεが「0」にセットされる。
【0072】
次に、ステップ203において、視差取得済の走査線(この場合、h座標値=0の走査線)から所定間隔離れた走査線のh座標値(=ε+α)を指定して、当該走査線について通常のマッチング処理を実行し、画素毎の視差を取得する。本発明において、「α」は視差の継承範囲を規定するためのパラメータであり、2の倍数として定義される適切な大きさの固定値であり、図11に示す例においては、α=8に設定されている。したがって、h座標値=ε+α=0+8=8が指定され、h座標値=8の走査線について通常のマッチング処理を実行し視差を取得する。
【0073】
次に、ステップ204においては、「視差取得済」とマークされた走査線が探索され、その中で隣接する走査線の中間に存在する走査線(以下、中間走査線という)のh座標値を指定する。なお、中間走査線のh座標値は、隣接する走査線のうち上側の走査線のh座標値=hUとその下側の走査線のh座標値=hLを加算しこれを2で除算することによって求めることができる。この場合、下側の走査線のh座標値=0と上側の走査線のh座標値=8を加算しこれを2で除算して得られる値「4」が中間走査線のh座標値となる。中間走査線(h座標値=4)が指定されると、ステップ205に進み、指定した中間走査線の各画素(i,h)について「視差承継処理」が実行される。以下、図11(b)を参照して、本発明における「視差承継処理」について説明する。
【0074】
「視差承継処理」においては、指定した中間走査線の画素(i,h)と同じi座標値を持つ、上側の走査線上の画素(i,h+n)の視差と下側の走査線上の画素(i,h-n)の視差が比較される。その結果、2つの視差が等しい場合には、中間走査線の画素(i,h)に当該視差を承継させ、2つの視差が異なる場合には、中間走査線の画素(i,h)を「要処理」とマークする。
【0075】
図11(b)に示す例においては、中間走査線(h座標値=4)の画素(0,4)に着目すると、画素(0,4)と同じi座標を持つ、下側の走査線(h座標値=0)の画素(0,0)の視差(=5)と上側の走査線(h座標値=8)の画素(0,8)の視差(=5)は等しい。この場合、その間に挟まれる画素(0,4)に視差の変化がないと推定し、画素(0,4)に視差=5を承継させる。また、中間走査線の画素(7,4)に着目すると、下側の走査線の画素(7,0)の視差(=4)と上側の走査線の画素(7,8)の視差(=4)は等しいので、同様に、画素(7,4)に視差=5を承継させる。このように、本発明の方法によれば、中間走査線上の一部の領域について、マッチング処理を要することなく視差を取得することができるので、処理量を大幅に削減することができ、その結果、処理速度を格段に高速化することができる。
【0076】
一方、中間走査線の画素(3,4)に着目すると、画素(3,4)の下側の走査線上の画素(3,0)の視差(=5)と上側の走査線上の画素(3,8)の視差(=3)は異なる。この場合、その間に挟まれる画素(3,4)について改めて視差を取得する必要があると判断し、画素(3,4)を「要処理」とマークする。
【0077】
上述した処理が中間走査線(h座標値=4)の全ての画素について実行される結果、中間走査線(h座標値=4)の画素(0,4)、画素(1,4)、画素(2,4)、画素(7,4)、画素(8,4)、画素(9,4)については既に計算された視差が承継され、画素(3,4)、画素(4,4)、画素(5,4)、画素(6,4)については「要処理」とマークされる。その後、「要処理」とマークされた画素領域についてのみ、通常のマッチング処理が実行される。その結果、中間走査線(h座標値=4)の全画素について視差が取得され、中間走査線(h座標値=4)が「視差取得済」とマークされる。
【0078】
次に、ステップ206において、「視差取得済」とマークされた複数の走査線間のh座標値の差の最大値=1であるか否かを判断する。走査線間のh座標値の差の最大値=1でない場合(ステップ206、No)、2つの視差取得済走査線に挟まれた視差を取得していない領域が残っていることになるので、ステップ204〜ステップ205の処理を再度実行する。
【0079】
図11(b)に示す例の場合、「視差取得済」とマークされた走査線は、走査線(h座標値=0)、走査線(h座標値=4)、走査線(h座標値=8)であり、視差取得済走査線間のh座標値の差の最大値=4であるので(ステップ206、No)、処理は、ステップ204に戻って新たな中間走査線が指定される。具体的には、視差取得済走査線(h座標値=0)と視差取得済走査線(h座標値=4)に対する中間走査線(h座標値=2)が指定され、視差取得済走査線(h座標値=4)と視差取得済走査線(h座標値=8)に対する中間走査線(h座標値=6)が指定される。その後、ステップ205に進んで、新たに指定された中間走査線(h座標値=2)および中間走査線(h座標値=6)について、上述した視差承継処理が実行される。
【0080】
その後、再び、ステップ206において、「視差取得済」とマークされた複数の走査線間のh座標値の差の最大値=1であるか否かを判断され、この場合、視差取得済走査線間のh座標値の差の最大値=2であるので(ステップ206、No)、もう一度、ステップ204〜205の処理が繰り返される。その結果、視差取得済走査線間のh座標値の差の最大値=1となる(ステップ206、Yes)。走査線間の座標値の差の最大値=1であるということは、2つの視差取得済走査線に挟まれた未処理領域がないことを意味するので、処理回数カウントCをインクリメントし(ステップ207)、ステップ208に進む。ステップ208においては、予め定められた目標処理回数が達成された否かが判断される。ここで、目標処理回数は、主カメラ画像の全走査線数−1をパラメータα(2の倍数)で除算した値が設定される。図11(a)に示す例の場合、主カメラ画像の全走査線数は「25」あり、パラメータα=8であるので、(25−1)÷8=3回が目標処理回数となる。
【0081】
この場合、処理回数カウントC=1であるので(ステップ208、No)、ステップ209に進む。ステップ209においては、パラメータεにパラメータαを加算した値を新たなパラメータε(0+8=8)とし、ステップ203に進む。ステップ203においては、h座標値(=ε+α=8+8=16)の走査線が指定され、当該走査線について通常のマッチング処理を実行し視差を取得する。その後、視差取得済走査線(h座標値=8)と視差取得済走査線(h座標値=16)の間に存在する7本の走査線について、上述したのと同様の処理が実行した後、ステップ209においては、パラメータεがさらに更新され(8+8=16)、さらに、視差取得済走査線(h座標値=16)と視差取得済走査線(h座標値=24)の間に存在する7本の走査線について、上述したのと同様の処理を実行する。その結果、処理回数カウントC=3となり(ステップ208、Yes)、全走査線(25本)上の全画素の視差の取得を完了して処理を終了する。
【0082】
以上、説明したように、本発明が採用する奥行値算出部108の構成によれば、3Dデータにおける奥行値を高精度に算出することが可能になり、且つ、奥行値の算出処理速度のリアルタイム性が担保される。その結果、裸眼の手術スタッフに対して、患部の実写映像の立体視画像を、多視点で、且つ、リアルタイムに提供することが可能な立体内視鏡システムが実現される。
【0083】
以上、本発明について実施形態をもって説明してきたが、本発明は上述した実施形態に限定されるものではなく、その他、当業者が推考しうる実施態様の範囲内において、本発明の作用・効果を奏する限り、本発明の範囲に含まれるものである。なお、上述した本発明における奥行値算出部が採用する視差の算出手法は、立体内視鏡に化限らず、ステレオ視計測を用いる技術全般に適用することができるのは言うまでもない。
【実施例】
【0084】
以下、本発明の多視点裸眼立体内視鏡システムについて、実施例を用いてより具体的に説明を行なうが、本発明は、後述する実施例に限定されるものではない。
【0085】
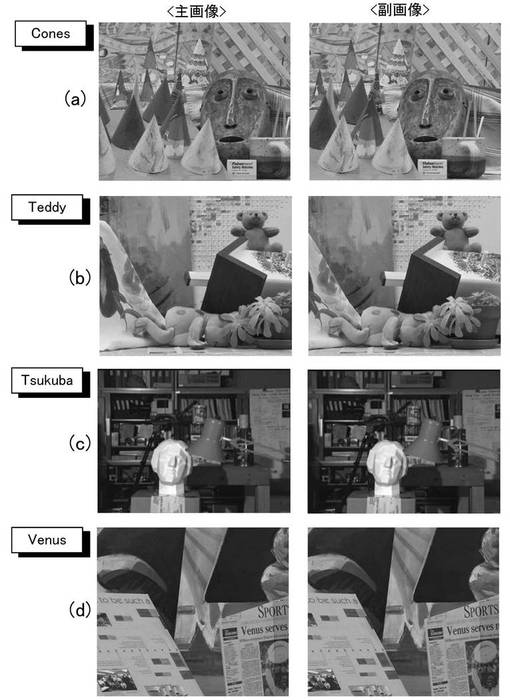
本発明の多視点裸眼立体内視鏡システムの奥行値算出部が採用する新規なDPマッチング手法を実装した計算機(CPU : Intel Core2 Quad Q9300/メモリ : 3GB / OS : Windows(登録商標) XP (32bit))による視差計測実験を実施した。なお、本実験においては、http://vision.middlebury.edu/stereo/から入手した、図13(a)〜(d)に示す4組のステレオ画像(「Cones」「Teddy」「Tsukuba」「Venus」)を用いた。
【0086】
本実験においては、実施例1の計算機を下の条件で動作させた。すなわち、輝度取得領域Gの動的設定については、(1)最大画素数E=3(上側),-3(下側)、(2)注目画素(i,h)に対する輝度距離の閾値KC=10、(3)輝度変化量kの閾値Ke=400とした。
【0087】
また、斜め経路先端の重み係数λ(i,j)については、下記式(9)におけるw=0.25とした。
【0088】
【数10】
【0089】
さらに、コストc(i,j)については、下記式(7)における根r=512とした。
【0090】
【数11】
【0091】
一方、比較例として、従来のステレオ視計測方法を実装した計算機(実施例1と同じスペックのもの)による視差計測実験を実施した。すなわち、単一画素の輝度距離をコストとして定義し、斜め経路選択の重み係数λ=0.4(固定値)とした。
【0092】
<正解率の検証>
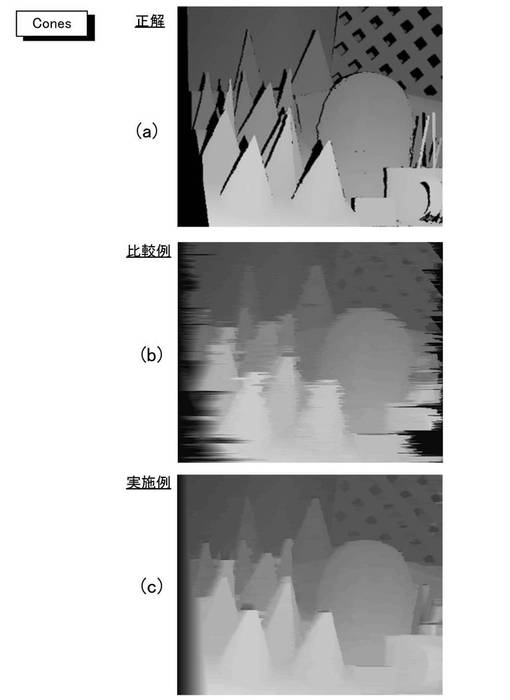
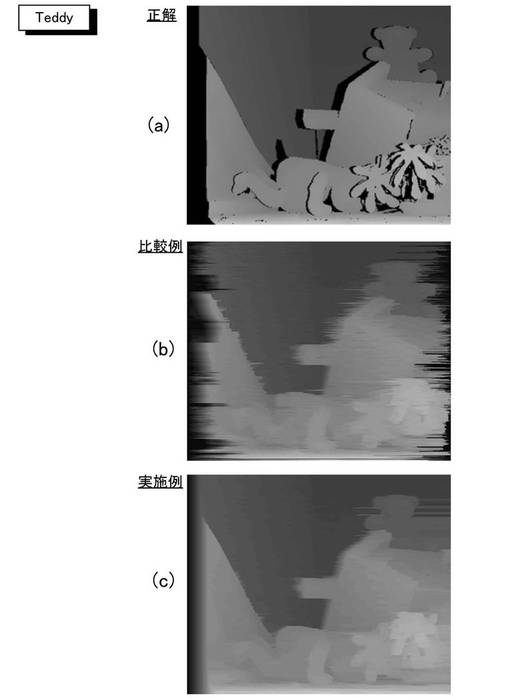
図14〜図17は、それぞれ、4つのステレオ画像対(「Cones」「Teddy」「Tsukuba」「Venus」)について得られた結果を示す。なお、図14(a)は、予め用意された正解の視差を示し、図14(b)は、比較例の視差を示し、図14(c)は、実施例1の視差を示す(図15および図16についても同様)。
【0093】
また、下記表1は、実施例1および比較例について、4組のステレオ画像(「Cones」「Teddy」「Tsukuba」「Venus」)における正解率[%]を示す。なお、本実験においては「正解」=正解の視差に対するずれが1画素以内のものとし、正解率[%]=正解画素の数/視差の算出が可能な全画素数×100とした。
【0094】
【表1】
【0095】
上記表1に示されるように、実施例1の正解率は、比較例のそれに比べて10ポイント以上高い値を示した。
【0096】
<処理の高速化の検証>
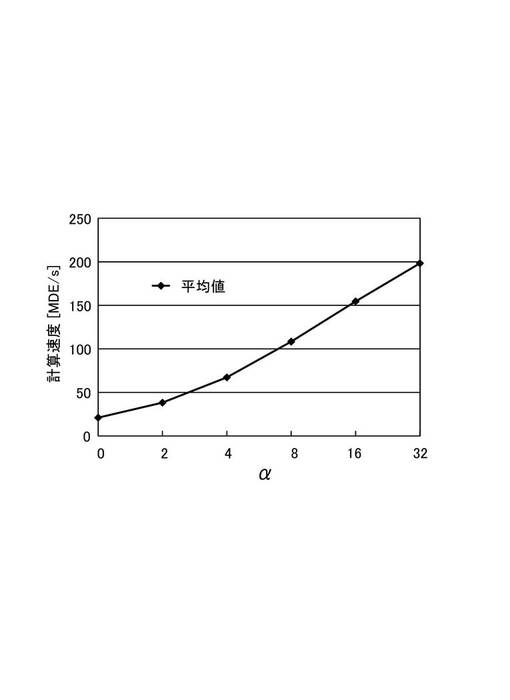
上述した実施例1の構成に対して、さらに、視差継承処理の機能を実装させた計算機により、同じく、図13(a)〜(d)に示す4組のステレオ画像(「Cones」「Teddy」「Tsukuba」「Venus」)を用いて視差計測実験を実施した。なお、本実験においては、計測対象画像をX軸方向に4分割した並列処理により視差を計測した。また、本実験においては、視差の継承範囲を規定するためのパラメータαについて、5つの条件(パラメータα=2、4、8、16、32)を設定し、それぞれの実験を実施例2〜6とした。下記表2は、実施例1〜6について、4つのステレオ画像対(「Cones」「Teddy」「Tsukuba」「Venus」)におけるMDE/S (Million Disparity Estimations per second)を示す。また、図18は、パラメータαとMDE/Sの平均値との関係を示す。なお、MDE/Sは、(視差の最大値)×(画像の総画素数)×(1秒間に処理した画像の枚数)×106として定義される画像の大きさに依存しない計算速度の指標である。
【0097】
【表2】
【0098】
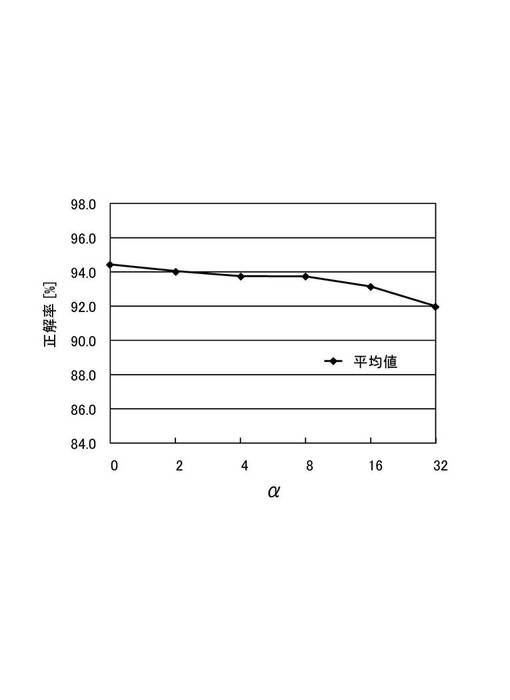
上記表2および図18に示されるように、MDE/Sの値は、パラメータαの値にほぼ比例して増加した。さらに、下記表3は、実施例1〜6の4組のステレオ画像(「Cones」「Teddy」「Tsukuba」「Venus」)における正解率[%]を示す。また、図19は、パラメータαと正解率[%]の平均値との関係を示す。
【0099】
【表3】
【0100】
上記表3および図19に示されるように、正解率[%]は、パラメータαの値が大きくなるにつれ若干低くなる傾向が見られたが、それでも、比較例に比べてかなり高い値を維持した。
【産業上の利用可能性】
【0101】
以上、説明したように、本発明によれば、立体内視鏡システムに特有のストレスから手術スタッフを解放するとともに、質の高い施術を支援することができる新規な立体内視鏡システムが提供される。本発明の多視点裸眼立体内視鏡システムの普及により、外科手術がより高度な発展を遂げ、その結果、一人でも多くの命が救われることを期待する。
【符号の説明】
【0102】
100…多視点裸眼立体内視鏡システム
102…多視点ステレオ画像生成部
104…3Dデータ生成部
106…レンダリング部
108…奥行値算出部
200…眼鏡式立体内視鏡システム
201…ステレオカメラ
202…左目用カメラ
204…右目用カメラ
206…画像出力制御部
208…画像切替部
210…ディスプレイ
212…3Dメガネ
300…多視点裸眼立体ディスプレイ装置
302…レンチキュラーレンズアレイ
【技術分野】
【0001】
本発明は、立体内視鏡システムに関し、より詳細には、多視点裸眼立体内視鏡システムに関する。
【背景技術】
【0002】
近年、外科分野において内視鏡手術が急速に普及している。内視鏡手術によれば、鉗子などの手術器具と内視鏡スコープを挿入するための小さな切開だけで済むため、従来の開腹手術に比べて手術創を格段に小さくすることができ、患者の身体的負担を軽減することができる。現在、一般に多く行われている内視鏡手術においては、患部の画像が手術台に設置された大型モニターに映し出され、執刀医とその助手をはじめ、麻酔医や看護師などから構成される手術スタッフは、当該モニターを見ながら手術を行う。しかしながら、モニターに映し出される2D画像から患部の「奥行き」を正確に感じとることは難しく、空間認識の点から見れば、直接的に患部を目視することができる開腹手術に劣るといわざるを得なかった。
【0003】
この点につき、最近、3D画像システムを適用した立体内視鏡システムが種々検討されている。立体内視鏡システムにおいて、手術スタッフは、患部の3D画像を見ながら手術することができる。特開2007−044153号公報(特許文献1)は、そのような立体内視鏡装置を開示する。
【0004】
ここで、現在最も多く用いられている眼鏡式立体内視鏡システムの原理について説明する。図20は、眼鏡式立体内視鏡システム200を示す。眼鏡式立体内視鏡システム200は、内視鏡スコープの先端にステレオカメラ201を備え、配置された2つのCCDカメラ(左目用カメラ202・右目用カメラ204)が対象物の左目用画像および右目用画像をそれぞれ撮像して画像出力制御部206に送信する。画像出力制御部206においては、画像切替部208がフレームシーケンシャル方式に則って左目用画像と右目用画像を交互に出力し、ディスプレイ210が左目用画像と右目用画像を交互に表示する。一方、手術スタッフは、専用の3Dメガネ212を装着した状態で、ディスプレイ210に表示される画像を見る。ここで、3Dメガネ212は、左目用画像と右目用画像の切り替えに同期して左右の視界を交互に遮断する液晶シャッターを備えているため、左目用画像は左目だけに見え、右目用画像は右目だけに見える。その結果、手術スタッフは、その脳内で左右の画像を合成し、対象物の立体イメージを得る。
【0005】
しかしながら、上述した眼鏡式立体内視鏡システムを用いる手術スタッフについて、専用の3Dメガネに起因する肉体的・精神的ストレスが報告されている。アクティブシャッター特有のフリッカー現象に伴う眼精疲労や重量のある特殊なメガネを長時間装着することに伴う精神的ストレスなどはその一例である。さらに、眼鏡式立体内視鏡システムにおいて、単一視点のステレオ画像が映し出されることに起因する問題がある。すなわち、複数の手術スタッフがディスプレイ210を見ながら手術を行う場合、ディスプレイ210を正面から見る手術スタッフにおいては、実際の視点と画像の視点が一致するので問題はないが、ディスプレイ210を左側あるいは右側から見る手術スタッフにおいては、実際の患部の奥行きと画像から感受される奥行き感が一致せず、このことがバーチャルリアリティ酔い(VR酔い)の原因となっていた。外科手術においては、長時間にわたり細心の注意力と高度な集中力が要求されるため、手術環境からストレスの原因を出来る限り排除しなければならない。
【0006】
上述した点に関し、近年、マルチビューの裸眼立体ディスプレイ装置の実用化が進んでいる。特開2005−86414号公報(特許文献2)は、そのような多視点裸眼立体ディスプレイ装置を開示する。図21は、多視点裸眼立体ディスプレイ装置の機構を説明するための概念図である。多視点裸眼立体ディスプレイ装置300は、多眼方式やインテグラルフォトグラフィー方式などの古くから知られる立体写真技術を応用したものであり、レンチキュラーレンズアレイ302を用いることによって、裸眼による立体視と多視点を同時に実現している。
【0007】
図21の右側に破線で囲んで示すように、多視点裸眼立体ディスプレイ装置300においては、複数のピクセル(図21に示す例においては7つのピクセル)が1単位として1つのレンチキュラーレンズ内に収められている。なお、各ピクセルは、縦方向(紙面に垂直方向)に並んだ図示しない3つのサブピクセル(RGB)からなる。各ピクセルの光はレンチキュラーレンズによって屈折し、別々の方向に放射線状に出射する。この多重化されたピクセルとレンチキュラーレンズを組み合わせることによって、複数の異なる視点に対応付けられた複数のステレオ画像を集約してディスプレイ上に同時に表示することができる。
【0008】
なお、多視点裸眼立体ディスプレイ装置300に表示させるための多視点ステレオ画像は、3次元コンピュータグラフィックス(3DCG)によって作成することができる。たとえば、7つの視点に対応する7組のステレオ画像(左目用画像および右目用画像の組)を3DCGによって作成する場合、予め形状データを定義したオブジェクトを仮想3次元空間に配置した上で、7組の仮想的なカメラ視点を設定し、各カメラ視点を原点とする仮想スクリーンに透視投影した場合のオブジェクトの2次元画像を計算によって求めて生成する(レンダリング)。なお、1視点に対応するステレオ画像は、左目視点に対応する画像と右目視点に対応する画像からなるので、都合、7×2=14の2次元画像を算出する必要がある。
【0009】
上述した手順で生成された14の2次元画像を構成する各画素データは、左目用画像および右目用画像が適切な視差を持つように、且つ、それぞれが予め定義された視点で結像するように、適切なピクセル座標が計算され割り当てられる。その結果、各視点に対応付けられたステレオ画像が当該視点に位置するユーザの左右の目に振り分けられて結像し、且つ、ユーザの視点移動に合わせてユーザの左右の目に結像するステレオ画像が遷移する。上述した機構によって裸眼による多視点立体視が実現される。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開2007−044153号公報
【特許文献2】特開2005−86414号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
本発明は、上記従来技術における課題に鑑みてなされたものであり、本発明は、立体内視鏡システムに特有のストレスから手術スタッフを解放するとともに、質の高い施術を支援することができる新規な立体内視鏡システムを提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明者は、立体内視鏡システムに特有のストレスから手術スタッフを解放するとともに、質の高い施術を支援することができる立体内視鏡システムにつき鋭意検討した結果、撮像対象の奥行値とRGB値を関連付けた3Dデータに基づいて、複数の仮想的な視点に対応する複数のステレオ画像をリアルタイムに生成し、これを既存の多視点裸眼立体ディスプレイ装置に表示させることによって、患部の実写映像の多視点裸眼立体視が可能になることを見出し、本発明に至ったのである。
【0013】
すなわち、本発明によれば、ステレオカメラと、該ステレオカメラによって取得されたステレオ画像に基づいて多視点ステレオ画像を生成する多視点ステレオ画像生成部と、該多視点ステレオ画像を表示するための多視点裸眼立体ディスプレイとを含む立体内視鏡システムであって、多視点ステレオ画像生成部は、前記ステレオカメラによって取得されたステレオ画像の画素毎の奥行値とRGB値を対応付けた3Dデータを生成する3Dデータ生成部と、前記3Dデータに基づいて複数の仮想的な視点に対応する複数のステレオ画像が集約してなる多視点ステレオ画像を描画するレンダリング部とを含む立体内視鏡システムが提供される。
【0014】
さらに、本発明によれば、ステレオ画像の各画素について視差を取得するために動的計画法に基づいてステレオマッチングを行う方法であって、注目画素を含んで縦方向に連続する複数の画素を輝度値取得領域として定義し、該複数の画素の各画素について算出した輝度距離の平均値またはその累乗根を前記ステレオマッチングにおけるコストとして定義することを特徴とする方法が提供される。本発明においては、前記輝度値取得領域をエッジにまたがって延在しないように動的に定義し、前記ステレオマッチングにおける斜め経路選択の重み係数が前記輝度距離の平均値の大きさに応じて大きくなるように設定することを好ましい。さらに、本発明においては、前記ステレオ画像において対象となる走査線を所定間隔毎に定義して該走査線上の各画素の視差を前記ステレオマッチングによって取得した上で、縦方向に存在する視差取得済みの2つの画素の間に位置する画素について、前記2つの画素の視差が変化しない場合には、前記2つの画素の間に位置する画素に前記2つの画素の視差を承継させ、前記2つの画素の視差が変化する場合には、前記2つの画素の間に位置する画素についてのみ新たに前記ステレオマッチングを行って視差を取得するといった一連の処理を実行することが好ましく、前記一連の処理を前記ステレオ画像の全画素の視差が取得されるまで再帰的に繰り返すことが好ましい。
【発明の効果】
【0015】
上述したように、本発明によれば、立体内視鏡システムに特有のストレスから手術スタッフを解放するとともに、質の高い施術を支援することができる新規な立体内視鏡システムが提供される。本発明によれば、開放的な環境において、一斉に多人数が特別な観察道具に接触することなく、対象について連続的多視点から奥行感をつかむことができる。
【図面の簡単な説明】
【0016】
【図1】本実施形態の多視点裸眼立体内視鏡システムの機能ブロック図。
【図2】ステレオ視計測の基本原理を説明するための概念図。
【図3】ステレオ視計測の基本原理を説明するための概念図。
【図4】ステレオ視計測の基本原理を説明するための概念図。
【図5】単一画素の輝度距離をコストとする従来のDPマッチングの概念図。
【図6】本実施形態における輝度値取得領域を説明するための概念図。
【図7】本実施形態における輝度値取得領域を説明するための概念図。
【図8】本実施形態における輝度値取得領域を説明するための概念図。
【図9】本実施形態における輝度値取得領域を決定する処理を示すフローチャート。
【図10】大きな色の差の影響を低減する処理を説明するための概念図。
【図11】本実施形態における視差承継処理を説明するための概念図。
【図12】本実施形態における視差承継処理を示すフローチャート。
【図13】視差計測実験に用いた4組のステレオ画像を示す図。
【図14】ステレオ画像「Cones」について得られた結果を示す図。
【図15】ステレオ画像「Teddy」について得られた結果を示す図。
【図16】ステレオ画像「Tsukuba」について得られた結果を示す図。
【図17】ステレオ画像「Venus」について得られた結果を示す図。
【図18】パラメータαとMDE/Sの平均値との関係を示す図。
【図19】パラメータαと正解率[%]の平均値との関係を示す図。
【図20】従来の眼鏡式立体内視鏡システム示す図。
【図21】多視点裸眼立体ディスプレイ装置の機構を説明するための概念図。
【発明を実施するための形態】
【0017】
以下、本発明を図面に示した実施の形態をもって説明するが、本発明は、図面に示した実施の形態に限定されるものではない。なお、以下に参照する各図においては、共通する要素について同じ符号を用い、適宜、その説明を省略するものとする。
【0018】
図1は、本発明の実施形態である多視点裸眼立体内視鏡システム100の機能ブロック図を示す。本実施形態の多視点裸眼立体内視鏡システム100は、ステレオカメラ201と、多視点ステレオ画像生成部102と、多視点裸眼立体ディスプレイ300とを含んで構成されている。
【0019】
ステレオカメラ201は、既存の立体内視鏡用カメラとして参照することができる。2つのCCDカメラ(左目用カメラ202・右目用カメラ204)がそれぞれ撮像した対象物の左目用画像および右目用画像は、多視点ステレオ画像生成部102の3Dデータ生成部104に送信される。3Dデータ生成部104においては、受信した左目用画像および右目用画像に基づいて3Dデータが生成される。なお、本発明における3Dデータとは、画素毎に定義される情報であって、奥行値とRGB値を対応付けた情報をいう。
【0020】
レンダリング部106は、3Dデータ生成部104が生成した3Dデータに基づいて、複数の仮想的な視点に対応する複数のステレオ画像をレンダリングする。具体的には、レンダリング部106は、3Dデータに含まれる奥行値に基づいて、実空間上の座標系の対象物(患部)の3次元座標値を計算により取得する。さらに、取得した3次元座標値に基づいて複数の仮想的な視点に対応する複数のステレオ画像をレンダリングし、レンダリングした各画像について適切なピクセル座標を割り当てて集約する。その結果、複数の仮想的な視点に対応する複数のステレオ画像が集約した1枚の多視点ステレオ画像が描画される。レンダリング部106が生成した多視点ステレオ画像は、多視点裸眼立体ディスプレイ300に送信され表示される。
【0021】
本実施形態の多視点裸眼立体内視鏡システム100によれば、手術スタッフは専用のメガネを装着する必要がないため、開放的な環境下で施術することができる。また、本システムにおいては、どの方向からディスプレイ300を見た場合でも、実際の対象の奥行きと画像から感受される奥行き感が一致するので、複数の手術スタッフが施術する場合であってもVR酔いになることがない。また、視点を左右上下に少しずつ変えることによって運動視差が得られるため、単一視点の立体映像を観察する場合に比較して、対象物(患部)についてより自然な奥行き感を感受することが可能になる。このことは、施術の精度の向上に少なからず寄与するであろう。
【0022】
以上、説明したように、従来の眼鏡式立体内視鏡システムにおいては、対象物(患部)について取得した単一視点のステレオ画像(左目用画像および右目用画像)をそのままの形で交互にディスプレイに表示することによって、単一視点の立体視を実現していたのに対し、本実施形態の多視点裸眼立体内視鏡システム100においては、対象物(患部)について取得した単一視点のステレオ画像から、一旦、計算によって3Dデータを生成した上で、当該3Dデータに基づいて複数の仮想的な視点に対応する複数のステレオ画像を再構築し、当該複数のステレオ画像を集約した1枚の多視点ステレオ画像として表示させることによって、患部の実写映像の多視点裸眼立体視を実現することを特徴とする。
【0023】
ここで、本システムの実用化のためには、まず第1に、複数の仮想的な視点に対応する複数のステレオ画像を再構築する際の根拠となる3Dデータにおける奥行値を高精度に算出する必要がある。誤った奥行値からは正しい奥行き感を反映したステレオ画像を再現できず、結果的に患部の観察精度が低下するからである。第2に、患部の実写動画をリアルタイムで表示する必要があるため、奥行値の算出処理速度のリアルタイム性を担保しなければならない。本発明においては、上述した2つの課題をクリアするための手段が3Dデータ生成部104の奥行値算出部108に実装される。以下、本実施形態の多視点裸眼立体内視鏡システム100における特徴的な構成である奥行値算出部108の構成について、順を追って詳細に説明する。
【0024】
本実施形態における奥行値算出部108の説明に入る前に、ステレオ画像から奥行値を取得する際に用いるステレオ視計測の基本原理を説明しておく。なお、以降の説明において、上述した「左目用カメラ」および「右目用カメラ」を「主カメラ」および「副カメラ」として参照する。図2は、ステレオ視計測の基本原理を説明するための概念図である。図2においては、実空間上の座標系(ワールド座標系)の3次元座標(x,y,z)に対して、主カメラ画像上の2次元座標(i,h)および副カメラ画像上の2次元座標(j,h)が定義されており、カメラをピンホールカメラとしてモデル化したうえで、主カメラの焦点をP、副カメラの焦点をP’、両カメラの焦点間の距離(基線長)をb、焦点からスクリーン(各カメラ画像)までの距離(焦点距離)をfとして示している。なお、焦点距離fは、カメラをピンホールカメラとしてモデル化した場合に適切な値となるように、事前のカメラ校正で求めておく。
【0025】
ここで、図2(a)に示すように、対象物上の任意の点Aの主カメラ画像上の投影点をM,点Aの副カメラ画像上の投影点をSとし、副カメラの焦点P’および副カメラ画像をx軸方向に平行移動して、主カメラの焦点Pおよび主カメラ画像に完全に重ねると、図2(b)に示す位置関係が得られる。ここで、ステレオ視計測における視差は、主カメラ画像上の投影点M(i,h)と副カメラ画像上の投影点S(j,h)の離間距離(i-j)として求めることができる。ここで、図2(b)に示す三角形PAA’と三角形PSMは相似の関係にあるので、下記式(1)が成立する。
【0026】
【数1】
【0027】
上記式(1)を変形すると、下記式(2)が得られる。
【0028】
【数2】
【0029】
上記式(2)によれば、視差(i-j)を求めることによって、対象物上の任意の点Aまでの距離Z(すなわち、奥行値)を導出できることが理解され、その結果、奥行値の算出処理の速度が視差(i-j)の算出処理の速度に依存することが理解されるであろう。ここで、カメラの取得画像がRGBデジタル画像である場合、投影点Mおよび投影点Sは、RGBデジタル画像の画素Mおよび画素Sに置き換えることができるので、視差(i-j)の算出処理は、実質的に、画素Mおよび画素Sの座標値を求める処理と等価であるということができる。
【0030】
図3(a)は、対象物を撮像した際の主カメラ画像および副カメラ画像を示す。ステレオ視計測装置においては、主カメラおよび副カメラが平行等位に配置されているので、主カメラ画像上の画素(以下、主画素という)に対応する副カメラ画像上の画素(以下、副画素という)は、同じ高さにある走査線上に存在するはずである。したがって、対象物上の任意の点に対応する主カメラ画像上の画素Mおよび副カメラ画像上の画素Sの正しい組み合わせを取得することは、図3(b)に示すように、同じ高さの(すなわち、h座標値が等しい)走査線上の2つの画素群のマッチング問題(いわゆるステレオマッチング)に帰着することが理解されるであろう。
【0031】
図4(a)は、図3(b)に示した主カメラ走査線と副カメラ走査線との間でステレオマッチングを行った結果を示す。図4(a)においては、主画素と副画素のマッチング結果を矢線で示している。
【0032】
また、図4(b)は、主カメラ走査線上の画素群と副カメラ走査線上の画素群の間のマッチング問題を解くためのマトリックスを示す。マトリックスの縦軸および横軸は、それぞれ、副カメラ画像のj座標軸および主カメラ画像のi座標軸に対応しており、マトリックスの各交点は、主画素と副画素の組に対応している。
【0033】
マトリックスの各交点には、マッチングにおけるコストとして、当該交点に対応する主画素と副画素の間の輝度値の差の絶対値(以下、輝度距離という)が付与されている。ここで、同一の対象点Aが写り込んだ正しい画素の組み合わせ(すなわち、画素Mおよび画素S)は、輝度値の差が最も小さい画素の組み合わせと考えることができる。したがって、上述したマッチング問題は、図4(b)に示したマトリックスにおいて、左下の始点から右上の終点に至るパスのうち、パス上の各交点に付与されたコスト(輝度距離)の総和が最も小さくなる最適パスの探索問題に置き換えることができる。この探索問題は、以下の理由により、動的計画法に基づくステレオマッチング(以下、DPマッチングという)によって処理することができる。
【0034】
すなわち、図4(a)に示されるように、仮に、画素Mと画素Sを正しい組み合わせとすれば、その余の正しい組み合わせにおいて、画素Mよりも左側に存在する画素は、画素Sよりも左側に存在する画素と組み合うはずである。このことを図4(b)に示すマトリックスに照らして考えれば、画素Mと画素Sの組み合わせの直前の正しい組み合わせ(交点)は、必ず画素Mと画素Sの交点から見て、左、下、斜め左下の3つのうちのいずれかに存在することを意味する。つまり、画素Mと画素Sの正しい組み合わせに至るまでの最適な組み合わせの列として、画素Mと画素Sの交点から見て、左、下、斜め左下の3つの各交点に至る3つの組み合わせの列の中から最適なものを選べばよいことになる。
【0035】
図4(b)に示すマトリックスを用いたDPマッチングにおいて、マトリックスの交点(i,j)に至る最適パスの総コストD(i,j)は、下記式(3)で表すことができる。なお、下記式(3)において、d(i,j)は、マトリックスの交点(i,j)に付与された輝度距離(コスト)を示し、D(i-1,j)、D(i-1,j-1)、D(i,j-1)は、交点(i,j)の直前の交点(i-1,j)、交点(i-1,j-1)、交点(i,j-1)に至るそれぞれの最適パスの総コストを示し、λは、斜めの経路を選択する重み係数を示す。
【0036】
【数3】
【0037】
DPマッチングにおいては、図4(c)に示すように、直前に求められたD(i-1,j)、D(i-1,j-1)、D(i,j-1)と、d(i,j)と、重み係数λを上記式(3)に代入し、最小値minを与えるものを最適パスとして選択するといった処理を図4(b)に示すマトリックスの始点から終点に至るまで繰り返すことによって、始点から終点に至るパスのうち、パス上の各交点に付与されたコスト(輝度距離)の総和が最も小さくなる最適パスを決定することができる。
【0038】
以上、DPマッチングを用いたステレオ視計測の原理について説明してきたが、次に、本実施形態の多視点裸眼立体内視鏡システム100における奥行値算出部108が備える特徴的な構成について説明する。本実施形態における奥行値算出部108の特徴は、上述した従来のステレオ視計測におけるDPマッチング方法を改良した新規なDPマッチング方法を採用する点にある。すなわち、本実施形態における新規なDPマッチング方法においては、まず第1に、正解率の向上のために、DPマッチングにおけるコストを新たに定義する。第2に、DPマッチングの正解率の向上のために、斜め経路選択の重み係数λを適応的に決定する構成を採用する。さらに、本実施形態における奥行値算出部108は、第3に、処理の高速化のために、マッチング処理の省略化のための構成を採用する。以下、上述した第1〜第3の各内容につき、順を追って詳細に説明する。
【0039】
(DPマッチングにおける新たなコスト定義の導入について)
従来のステレオ視計測におけるDPマッチングにおいては、図5(a)に示すように、注目する主画素(i,h)の輝度値m(i,h)と、これと照合する副画素(j,h)の輝度値s(j,h)の差の絶対値を輝度距離d(i,j)とし、この輝度距離d(i,j)をDPマッチングにおけるコストとして定義するものであった。しかしながら、このような単一の画素についての輝度距離をコストとする方法では、ノイズの影響を大きく受けざるを得ず、このことがマッチング正解率を低下させていた。さらに、単一の画素についての輝度距離をコストとする方法では、走査線上に同じ色(すなわち、同じ輝度値)の画素が続く領域において曖昧さを排除することができず、マッチング正解率の向上に限界があった。この点について、図5(b)を参照して説明する。
【0040】
図5(b)は、単一の画素の輝度距離に基づくマッチングを示す。ここで、副カメラ画像上の画素(ロ)および画素(ハ)の輝度値が等しい場合、主カメラ画像の注目画素(イ)と副カメラ画像上の画素(ロ)の輝度距離は、主カメラ画像の注目画素(イ)と副カメラ画像上の画素(ハ)の輝度距離と等しくなって曖昧さが残る。このような従来法の問題点につき、本発明は、注目画素を含む複数の画素の輝度値を利用してコストを定義することによってこれを解決する。以下、この点について、図6を参照して説明する。
【0041】
本発明においては、注目画素を含んで縦方向(h軸方向)に連続する複数の画素を輝度値取得領域として定義する。具体的には、図6(a)の左側に太線で囲んで示すように、注目する主画素(i,h)を基準(0)として、走査線に対して垂直なh座標軸の正方向εU番目の画素を上端画素とし、h座標軸の負方向εL番目(εLは負の値とする)の画素を下端画素とする画素群を特定し、これらを輝度値取得領域Gmとして定義する。同様に、マッチング対象となる副画素(j,h)を基準(0)として、h座標軸の正方向にεU番目の画素を上端画素とし、h座標軸の負方向にεL番目の画素を下端画素とする画素群を特定し、これらを輝度値取得領域Gsとして定義する。すなわち、輝度値取得領域Gsは輝度値取得領域Gmと同じ大きさに定義される。
【0042】
本発明においては、輝度値取得領域Gmに含まれる各画素について算出した輝度距離の平均値を領域平均輝度距離dAVE.とし、この領域平均輝度距離dAVE.をDPマッチングにおけるコストとして定義する。領域平均輝度距離dAVE.を下記式(4)に示す。なお、下記式(4)において、εはh座標の加算値を示し、Nは輝度値取得領域Gを構成する画素数(εU−εL+1)を示し、mは主画素の輝度値を示し、sは副画素の輝度値を示す。
【0043】
【数4】
【0044】
本発明がDPマッチングにおけるコストとして領域平均輝度距離dAVE.を採用することには以下の利点がある。まず第1に、本発明は、注目画素に対して当該注目画素を含む複数の画素について算出した輝度距離の平均値を値として持たせる構成を採用するので、仮に、左右のカメラの受光量の差異やCCD素子の感度の違いに起因するノイズが当該注目画素に含まれていたとしても、輝度距離の平均化によってノイズの影響が平準化され、その結果、ノイズに起因するマッチング正解率の低下が抑止される。第2に、領域平均輝度距離dAVEを求める際の輝度値取得領域Gを規定するεUおよびεLの値は、対象の形状に応じて動的に決定されるため、このような領域平均輝度距離dAVEを用いたマッチングは、実質的に、注目画素近傍の空間情報を利用するものとなり、その結果、単一画素を用いる場合に比較してマッチング正解率が格段に向上する。以下、この点について、図6(b)を参照して説明する。
【0045】
図6(b)は、領域平均輝度距離dAVEをコストとするマッチングを示す。図6(b)に示す例においては、副画素(ロ)を含む輝度値取得領域Gsは、副画素(ロ)の上に副画素(ロ)と色の異なる画素を含んでいるため、注目画素(イ)と副画素(ロ)の領域平均輝度距離dAVEは、注目画素(イ)と副画素(ハ)の領域平均輝度距離dAVEよりも大きくなる。その結果、副カメラ画像の画素(ハ)を正解として選出することが可能になる。なお、図6(b)は、理解の容易のため、輝度値取得領域Gs内の色が大きく異なる例を示したが、仮に、輝度値取得領域G内の画素の色が同色であったとしても、領域内の画素の輝度値にはある程度の分散が見込めるため、上述した効果を得ることができる。
【0046】
次に、本発明において、最適な輝度値取得領域Gを動的に設定する構成を採用することによって、マッチング正解率をさらに向上させることができる点について説明する。
【0047】
図7(a)は、2つの対象物を撮像した際の主カメラ画像および副カメラ画像を示す。図7(a)に示す例においては、輝度値取得領域Gmの大きさは固定されているものとする。ここで、四角形の対象物が写り込んだ主画素(ア)を注目画素とした場合、輝度値取得領域Gm内の画素(イ)には、背後の三角形の対象物が写り込む一方で、主画素(イ)に対応する輝度値取得領域Gs内の副画素(ウ)には、背後の三角形の対象物が写り込まず、背景が写り込むといったことが起こる。このような場合、主画素(ア)と副画素(ア’)の領域平均輝度距離dAVEが大きくなり、その結果、両者の組み合わせが正解として判断されない虞が生じる。つまり、輝度値取得領域Gmの大きさの設定如何によっては、返ってノイズを拾ってしまうことになり、マッチング正解率を低下させてしまうことになりかねない。この点につき、本発明は、図7(b)に概念的に示すように、主カメラ画像に写り込んだ対象物のエッジを基準にして、当該エッジにまたがって延在しないような輝度値取得領域Gmを動的に設定することによって、ノイズを拾うことを防止してマッチング正解率を向上させる。以下、輝度値取得領域Gの動的設定について詳細に説明する。
【0048】
本発明において、輝度値取得領域Gを設定することは、すなわち、輝度値取得領域Gの上端画素および下端画素を決定することと同義である。以下、輝度値取得領域Gの上端画素を決定する場合を例にとって説明する。本発明においては、注目画素(i,h)から見てh座標軸上方向のエッジ領域上にある画素を上端画素として決定する。注目画素(i,h)から見て、h座標軸上方向に存在する画素およびエッジ領域上が図8(a)に示されるような態様である場合、エッジ領域上の画素であって、注目画素(i,h)から見て色が大きく変化しない最上位の画素(i,h+3)が上端画素として決定される。また、注目画素(i,h)から見てh座標軸上方向に存在する画素およびエッジ領域上が図8(b)に示されるような態様である場合、色の変化よりもエッジが優先され、エッジ領域内の最上位の画素(i,h+4)が上端画素として決定される。なお、図8(c)に示すように、注目画素(i,h)近傍にエッジ領域が存在しない場合には、予め定められた最大画素数E(h座標の最大加算値E)をもって上端画素を決定する。図8(c)に示す例においては、E=5と定められているので、画素(i,h+5)が上端画素として決定される。
【0049】
上述した輝度値取得領域Gの上端画素を決定する処理を図9に示したフローチャートに基づいて説明する。まず、注目する主画素の座標値(i,h)をセットし(ステップ101)、h座標の加算値εを「1」とする(ステップ102)。次に、画素(i,h+ε)がエッジ領域上にあるか否かを判断する(ステップ103)。ここで、画素(i,h+ε)がエッジ領域上にあるか否かの判断は、以下の手順で実行することができる。
【0050】
まず、画素(i,h+ε)を基準として、下記式(5)に示す、i軸方向の輝度変化量ηおよびh軸方向の輝度変化量ζをSobelフィルタを用いて求める。なお、下記式(5)において、mは主画素の輝度値を示す。
【0051】
【数5】
【0052】
次に、画素(i,h+ε)について求めたηおよびζを下記式(6)に代入して求まる値を画素(i,h+ε)における輝度変化量kとし、輝度変化量kが予め定めた閾値Keを超える場合に、当該画素(i,h+ε)がエッジ領域上にあると判断する。
【数6】
【0053】
画素(i,h+ε)がエッジ領域上にあると判断される場合には(ステップ103,Yes)、ステップ104に進んでエッジフラグfeを立てた後に、注目画素(i,h)の輝度値m(i,h)と画素(i,h+ε)の輝度値の差の絶対値(輝度距離)が予め定めた閾値KCを超えるか否かを判断する(ステップ105)。輝度距離が閾値KCを超えない場合には(ステップ105,No)、ステップ106に進んでh座標の加算値εを「1」インクリメントした後に、加算値εが予め定められたh座標の最大加算値E(最大画素数E)を超えたか否かが判断される(ステップ107)。加算値εが最大加算値Eを超えている場合(ステップ107,Yes)、画素(i,h+E)を上端画素として定義して処理を終了する(ステップ108)。
【0054】
加算値εが最大加算値Eを超えていない場合(ステップ107,No)、ステップ103に戻り、前回判断した画素の一つ上の画素(i,h+ε)がエッジ領域上にあるか否かを判断する。以降、ステップ104→ステップ105→ステップ106→ステップ107→ステップ103の処理が繰り返されるごとに、判断対象となる画素のh座標が1ずつ繰り上がる。
【0055】
その間、ステップ105において、輝度距離が閾値KCを超えた場合には(ステップ105,Yes)、現在の画素(i,h+ε)の1つ手前の画素(i,h+ε-1)を上端画素として定義し(ステップ109)、処理を終了する。一方、画素(i,h+ε)がエッジ領域上に無い場合には(ステップ103,No)、エッジフラグが立っているか否かを判断する(ステップ110)。エッジフラグが立っている場合(ステップ110,Yes)、エッジ領域を超えたと判断し、現在の画素(i,h+ε)の1つ手前の画素(i,h+ε-1)を上端画素として定義して処理を終了する(ステップ109)。エッジフラグが立っていない場合(ステップ110,No)、ステップ106に進んで、先に説明したようにh座標の加算値εが「1」インクリメントされ、以降の処理が繰り返される。
【0056】
本発明においては、上述したのと同様の手順で輝度値取得領域Gの下端画素を決定した上で、上端画素から下端画素に至る複数の画素群を輝度値取得領域Gとして動的に設定する。以上、本発明におけるDPマッチングのコストについて説明してきたが、本発明においては、領域平均輝度距離dAVE.をマッチングコストとする構成に代えて、領域平均輝度距離dAVE.の累乗根をマッチングコストとする構成を採用することによって、マッチング正解率をさらに向上させることができる。以下、この点について説明する。なお、以下の説明において、単一の画素について言及する部分は、輝度値取得領域Gについて言及するものとして置き換えて参照されたい。
【0057】
図10(a)は、色の異なる3つの対象物を撮像した際の主カメラ画像および副カメラ画像を示す。図10(a)に示す例においては、主カメラ画像には、赤色、緑色、および黄色の3つの対象物が写っているが、副カメラ画像においては、赤色の対象物が緑色の対象物の背後に隠れてしまっている。この場合、赤色の対象物が写り込んだ主画素(ア)を注目画素としたマッチングにおいては、副カメラ画像の走査線上に正解は存在せず、誤った組み合わせを決定せざるを得ない。すなわち、ステレオ視計測におけるDPマッチングは、その原理上、不適切なマッチングを完全に排除することはできないのである。
【0058】
このような場合、副カメラ画像の走査線上にある全ての副画素は、マッチングコストの観点から見て等価であることが望ましいが実際にはそうはならない。なぜならば、RGBデジタル画像の画素の輝度値は、R値、G値、B値からなる3次元ベクトル情報であるため、特に、補色の関係にある色の組み合わせの場合、各値の差分の総和である輝度距離が大きくなるからである。
【0059】
たとえば、赤色の対象物上の主画素(ア)の輝度値は、[R=255,G=0,B=0]であり、緑色の対象物上の副画素(イ)の輝度値は、[R=0,G=255,B=0]であり、黄色の対象物上の副画素(ウ)の輝度値は、[R=255,G=255,B=0]である。その結果、主画素(ア)と副画素(イ)の組に付与されるコスト(輝度距離=510)が主画素(ア)と副画素(ウ)の組に付与されるコスト(輝度距離=255)の2倍になるといったことが生じる。このような大きな色の違いに起因して生じるコストの大きな差は、最適パスの探索に悪影響を及ぼす場合がある。
【0060】
ここで、説明の便宜上、10個の画素からなる画素群のマッチングを想定する。第1のパスにおいては、10組の画素組のうち、7組の画素組が正解(コスト=1)であり、残りの3組の画素組が誤った組み合わせであって、誤った組み合わせのコストがそれぞれ「10」であったとする。一方、第2のパスにおいては、10組の画素組のうち、9組の画素組が正解(コスト=1)であり、残りの1組の画素組が誤った組み合わせであって、この誤った組み合わせに大きな色の違いがあったため、そのコストが「50」であったとする。この例の場合、第1のパスのコストの総和は「59」となり、第2のパスのコストの総和は「37」となる。その結果、正答率の高い第2のパスではなく、正答率の低い第1のパスが最適マッチングとして決定されるといったことが生じる。
【0061】
上述した問題点につき、本発明においては、先に説明した領域平均輝度距離dAVE.の累乗根をDPマッチングにおけるコストとして定義する。下記式(7)にコストc(i,j)を示す。なお、下記式(7)において、根rは固定値であり、適切な値を設定する。たとえば、本発明においては、根r=512〜1024とすることができる。
【0062】
【数7】
【0063】
図10(b)は、領域平均輝度距離dAVE.とコストc(i,j)の関係を示す図である。図10(b)に示されるように、領域平均輝度距離dAVE.をそのままコストc(i,j)として定義する場合には、当然のごとく領域平均輝度距離dAVE.に正比例してコストc(i,j)が増大するが、領域平均輝度距離dAVE.の累乗根をコストc(i,j)として定義する場合には、領域平均輝度距離dAVE.の値が小さい範囲においては、領域平均輝度距離dAVE.の増加に応じてコストc(i,j)が増大するが、領域平均輝度距離dAVE.の値が大きい範囲においては、コストc(i,j)の増加率が徐々に低下する。すなわち、領域平均輝度距離dAVE.の累乗根をDPマッチングにおけるコストとして定義することによって、不適切なマッチングを含むパスの総コストを適切に見積もることが可能になり、その結果、マッチング正解率をさらに向上させることができる。以上、本実施形態における奥行値算出部108が採用するDPマッチングにおけるコストの詳細について説明してきたが、続いて、奥行値算出部108の第2の特徴である、斜め経路選択の重み係数λを適応的に決定する構成について説明する。
【0064】
(斜め経路選択の重み係数λを適応的に決定する構成について)
本発明におけるDPマッチングにおいて、図4(b)に示したマトリックスの交点(i,j)に至る最適パスの総コストC(i,j)は、下記式(8)で表すことができる。なお、下記式(8)において、c(i,j)は、マトリックスの交点(i,j)に付与されたコスト(すなわち、上記式(7)に示した領域平均輝度距離dAVE.の累乗根)を示し、C(i-1,j)、C(i-1,j-1)、C(i,j-1)は、交点(i,j)の直前の交点(i-1,j)、交点(i-1,j-1)、交点(i,j-1)に至るそれぞれの最適パスの総コストを示し、λは、斜めの経路を選択する重み係数を示す。
【0065】
【数8】
【0066】
ここで、上記式(8)における斜め経路選択の重み係数λの値を大きく設定すれば、斜めの経路を採り難くなり、重み係数λの値を小さく設定すれば、斜めの経路を採り易くなる。従来のDPマッチングにおいては、この重み係数λを固定値としていたが、本発明においては、この重み係数λをマトリックスの交点(i,j)における領域平均輝度距離dAVE.の大きさに応じて適応的に変化させる。すなわち、本発明においては、上記式(8)における斜め経路選択の重み係数λ(固定値)に代えて、下記式(9)に示す重み係数λ(i,j)を採用する。なお、下記式(9)におけるwは固定値であり、適切な値を設定する。本発明においては、w=0.15〜0.35とすることができる。
【0067】
【数9】
【0068】
DPマッチングにおいては、注目画素に対して適切なマッチング対象が存在しない場合であっても、縦または横の経路を採ることによって、一つの画素に二つ以上の画素を対応させることで適切に処理することができるので、そのための追加的な処理をおこなう必要がない。ここで、パスが斜めの経路を取るか、あるいは、縦または横の経路を取るのかは、重み係数λ(i,j)の値に大きく依存する。したがって、本発明においては、この重み係数λ(i,j)を適応的に変化させることによって、マッチング正解率をさらに向上させるものである。すなわち、本発明においては、マトリックスの交点(i,j)に付与されたコストc(i,j)が大きいほど(つまり、注目画素に対して適切なマッチング対象が存在しない可能性が大きいほど)、重み係数λ(i,j)の値が大きくなるので、パスが縦または横の経路を採りやすくなるように構成されている。以上、斜め経路選択の重み係数λを適応的に決定する構成について説明してきたが、続いて、奥行値算出部108の第3の特徴である、マッチング処理の省略化について説明する。
【0069】
(マッチング処理の省略化について)
先に図3を参照して説明したように、ステレオ視計測におけるDPマッチングは、走査線ごとに独立して行われる。従来のステレオ視計測においては、たとえば、主カメラ画像の縦幅が300ピクセルの場合、全画素の視差を取得するために300回のDPマッチングが必要であった。この点につき、本発明は、視差に変化が無い画素領域が画像のh軸方向に多く存在する点に着目し、視差に変化が無いと推定される画素領域については、既に取得した視差を継承することによって処理量を大幅に削減することで処理時間のリアルタイム性を実現する。以下、その具体的な内容について図11および図12に示すフローチャートに基づいて説明する。
【0070】
以下の説明は、図11(a)に示す主カメラ画像を例にとって説明する。なお、図11(a)に示す主カメラ画像は、25本(0〜24)の走査線を有しているものとする。
【0071】
まず、ステップ201において、一番下の走査線(h座標値=0)について通常のマッチング処理を実行し、画素毎の視差を取得する。視差の取得が完了した走査線は「視差取得済」とマークされる(以下、同様)。その後、ステップ202において、パラメータεが「0」にセットされる。
【0072】
次に、ステップ203において、視差取得済の走査線(この場合、h座標値=0の走査線)から所定間隔離れた走査線のh座標値(=ε+α)を指定して、当該走査線について通常のマッチング処理を実行し、画素毎の視差を取得する。本発明において、「α」は視差の継承範囲を規定するためのパラメータであり、2の倍数として定義される適切な大きさの固定値であり、図11に示す例においては、α=8に設定されている。したがって、h座標値=ε+α=0+8=8が指定され、h座標値=8の走査線について通常のマッチング処理を実行し視差を取得する。
【0073】
次に、ステップ204においては、「視差取得済」とマークされた走査線が探索され、その中で隣接する走査線の中間に存在する走査線(以下、中間走査線という)のh座標値を指定する。なお、中間走査線のh座標値は、隣接する走査線のうち上側の走査線のh座標値=hUとその下側の走査線のh座標値=hLを加算しこれを2で除算することによって求めることができる。この場合、下側の走査線のh座標値=0と上側の走査線のh座標値=8を加算しこれを2で除算して得られる値「4」が中間走査線のh座標値となる。中間走査線(h座標値=4)が指定されると、ステップ205に進み、指定した中間走査線の各画素(i,h)について「視差承継処理」が実行される。以下、図11(b)を参照して、本発明における「視差承継処理」について説明する。
【0074】
「視差承継処理」においては、指定した中間走査線の画素(i,h)と同じi座標値を持つ、上側の走査線上の画素(i,h+n)の視差と下側の走査線上の画素(i,h-n)の視差が比較される。その結果、2つの視差が等しい場合には、中間走査線の画素(i,h)に当該視差を承継させ、2つの視差が異なる場合には、中間走査線の画素(i,h)を「要処理」とマークする。
【0075】
図11(b)に示す例においては、中間走査線(h座標値=4)の画素(0,4)に着目すると、画素(0,4)と同じi座標を持つ、下側の走査線(h座標値=0)の画素(0,0)の視差(=5)と上側の走査線(h座標値=8)の画素(0,8)の視差(=5)は等しい。この場合、その間に挟まれる画素(0,4)に視差の変化がないと推定し、画素(0,4)に視差=5を承継させる。また、中間走査線の画素(7,4)に着目すると、下側の走査線の画素(7,0)の視差(=4)と上側の走査線の画素(7,8)の視差(=4)は等しいので、同様に、画素(7,4)に視差=5を承継させる。このように、本発明の方法によれば、中間走査線上の一部の領域について、マッチング処理を要することなく視差を取得することができるので、処理量を大幅に削減することができ、その結果、処理速度を格段に高速化することができる。
【0076】
一方、中間走査線の画素(3,4)に着目すると、画素(3,4)の下側の走査線上の画素(3,0)の視差(=5)と上側の走査線上の画素(3,8)の視差(=3)は異なる。この場合、その間に挟まれる画素(3,4)について改めて視差を取得する必要があると判断し、画素(3,4)を「要処理」とマークする。
【0077】
上述した処理が中間走査線(h座標値=4)の全ての画素について実行される結果、中間走査線(h座標値=4)の画素(0,4)、画素(1,4)、画素(2,4)、画素(7,4)、画素(8,4)、画素(9,4)については既に計算された視差が承継され、画素(3,4)、画素(4,4)、画素(5,4)、画素(6,4)については「要処理」とマークされる。その後、「要処理」とマークされた画素領域についてのみ、通常のマッチング処理が実行される。その結果、中間走査線(h座標値=4)の全画素について視差が取得され、中間走査線(h座標値=4)が「視差取得済」とマークされる。
【0078】
次に、ステップ206において、「視差取得済」とマークされた複数の走査線間のh座標値の差の最大値=1であるか否かを判断する。走査線間のh座標値の差の最大値=1でない場合(ステップ206、No)、2つの視差取得済走査線に挟まれた視差を取得していない領域が残っていることになるので、ステップ204〜ステップ205の処理を再度実行する。
【0079】
図11(b)に示す例の場合、「視差取得済」とマークされた走査線は、走査線(h座標値=0)、走査線(h座標値=4)、走査線(h座標値=8)であり、視差取得済走査線間のh座標値の差の最大値=4であるので(ステップ206、No)、処理は、ステップ204に戻って新たな中間走査線が指定される。具体的には、視差取得済走査線(h座標値=0)と視差取得済走査線(h座標値=4)に対する中間走査線(h座標値=2)が指定され、視差取得済走査線(h座標値=4)と視差取得済走査線(h座標値=8)に対する中間走査線(h座標値=6)が指定される。その後、ステップ205に進んで、新たに指定された中間走査線(h座標値=2)および中間走査線(h座標値=6)について、上述した視差承継処理が実行される。
【0080】
その後、再び、ステップ206において、「視差取得済」とマークされた複数の走査線間のh座標値の差の最大値=1であるか否かを判断され、この場合、視差取得済走査線間のh座標値の差の最大値=2であるので(ステップ206、No)、もう一度、ステップ204〜205の処理が繰り返される。その結果、視差取得済走査線間のh座標値の差の最大値=1となる(ステップ206、Yes)。走査線間の座標値の差の最大値=1であるということは、2つの視差取得済走査線に挟まれた未処理領域がないことを意味するので、処理回数カウントCをインクリメントし(ステップ207)、ステップ208に進む。ステップ208においては、予め定められた目標処理回数が達成された否かが判断される。ここで、目標処理回数は、主カメラ画像の全走査線数−1をパラメータα(2の倍数)で除算した値が設定される。図11(a)に示す例の場合、主カメラ画像の全走査線数は「25」あり、パラメータα=8であるので、(25−1)÷8=3回が目標処理回数となる。
【0081】
この場合、処理回数カウントC=1であるので(ステップ208、No)、ステップ209に進む。ステップ209においては、パラメータεにパラメータαを加算した値を新たなパラメータε(0+8=8)とし、ステップ203に進む。ステップ203においては、h座標値(=ε+α=8+8=16)の走査線が指定され、当該走査線について通常のマッチング処理を実行し視差を取得する。その後、視差取得済走査線(h座標値=8)と視差取得済走査線(h座標値=16)の間に存在する7本の走査線について、上述したのと同様の処理が実行した後、ステップ209においては、パラメータεがさらに更新され(8+8=16)、さらに、視差取得済走査線(h座標値=16)と視差取得済走査線(h座標値=24)の間に存在する7本の走査線について、上述したのと同様の処理を実行する。その結果、処理回数カウントC=3となり(ステップ208、Yes)、全走査線(25本)上の全画素の視差の取得を完了して処理を終了する。
【0082】
以上、説明したように、本発明が採用する奥行値算出部108の構成によれば、3Dデータにおける奥行値を高精度に算出することが可能になり、且つ、奥行値の算出処理速度のリアルタイム性が担保される。その結果、裸眼の手術スタッフに対して、患部の実写映像の立体視画像を、多視点で、且つ、リアルタイムに提供することが可能な立体内視鏡システムが実現される。
【0083】
以上、本発明について実施形態をもって説明してきたが、本発明は上述した実施形態に限定されるものではなく、その他、当業者が推考しうる実施態様の範囲内において、本発明の作用・効果を奏する限り、本発明の範囲に含まれるものである。なお、上述した本発明における奥行値算出部が採用する視差の算出手法は、立体内視鏡に化限らず、ステレオ視計測を用いる技術全般に適用することができるのは言うまでもない。
【実施例】
【0084】
以下、本発明の多視点裸眼立体内視鏡システムについて、実施例を用いてより具体的に説明を行なうが、本発明は、後述する実施例に限定されるものではない。
【0085】
本発明の多視点裸眼立体内視鏡システムの奥行値算出部が採用する新規なDPマッチング手法を実装した計算機(CPU : Intel Core2 Quad Q9300/メモリ : 3GB / OS : Windows(登録商標) XP (32bit))による視差計測実験を実施した。なお、本実験においては、http://vision.middlebury.edu/stereo/から入手した、図13(a)〜(d)に示す4組のステレオ画像(「Cones」「Teddy」「Tsukuba」「Venus」)を用いた。
【0086】
本実験においては、実施例1の計算機を下の条件で動作させた。すなわち、輝度取得領域Gの動的設定については、(1)最大画素数E=3(上側),-3(下側)、(2)注目画素(i,h)に対する輝度距離の閾値KC=10、(3)輝度変化量kの閾値Ke=400とした。
【0087】
また、斜め経路先端の重み係数λ(i,j)については、下記式(9)におけるw=0.25とした。
【0088】
【数10】
【0089】
さらに、コストc(i,j)については、下記式(7)における根r=512とした。
【0090】
【数11】
【0091】
一方、比較例として、従来のステレオ視計測方法を実装した計算機(実施例1と同じスペックのもの)による視差計測実験を実施した。すなわち、単一画素の輝度距離をコストとして定義し、斜め経路選択の重み係数λ=0.4(固定値)とした。
【0092】
<正解率の検証>
図14〜図17は、それぞれ、4つのステレオ画像対(「Cones」「Teddy」「Tsukuba」「Venus」)について得られた結果を示す。なお、図14(a)は、予め用意された正解の視差を示し、図14(b)は、比較例の視差を示し、図14(c)は、実施例1の視差を示す(図15および図16についても同様)。
【0093】
また、下記表1は、実施例1および比較例について、4組のステレオ画像(「Cones」「Teddy」「Tsukuba」「Venus」)における正解率[%]を示す。なお、本実験においては「正解」=正解の視差に対するずれが1画素以内のものとし、正解率[%]=正解画素の数/視差の算出が可能な全画素数×100とした。
【0094】
【表1】
【0095】
上記表1に示されるように、実施例1の正解率は、比較例のそれに比べて10ポイント以上高い値を示した。
【0096】
<処理の高速化の検証>
上述した実施例1の構成に対して、さらに、視差継承処理の機能を実装させた計算機により、同じく、図13(a)〜(d)に示す4組のステレオ画像(「Cones」「Teddy」「Tsukuba」「Venus」)を用いて視差計測実験を実施した。なお、本実験においては、計測対象画像をX軸方向に4分割した並列処理により視差を計測した。また、本実験においては、視差の継承範囲を規定するためのパラメータαについて、5つの条件(パラメータα=2、4、8、16、32)を設定し、それぞれの実験を実施例2〜6とした。下記表2は、実施例1〜6について、4つのステレオ画像対(「Cones」「Teddy」「Tsukuba」「Venus」)におけるMDE/S (Million Disparity Estimations per second)を示す。また、図18は、パラメータαとMDE/Sの平均値との関係を示す。なお、MDE/Sは、(視差の最大値)×(画像の総画素数)×(1秒間に処理した画像の枚数)×106として定義される画像の大きさに依存しない計算速度の指標である。
【0097】
【表2】
【0098】
上記表2および図18に示されるように、MDE/Sの値は、パラメータαの値にほぼ比例して増加した。さらに、下記表3は、実施例1〜6の4組のステレオ画像(「Cones」「Teddy」「Tsukuba」「Venus」)における正解率[%]を示す。また、図19は、パラメータαと正解率[%]の平均値との関係を示す。
【0099】
【表3】
【0100】
上記表3および図19に示されるように、正解率[%]は、パラメータαの値が大きくなるにつれ若干低くなる傾向が見られたが、それでも、比較例に比べてかなり高い値を維持した。
【産業上の利用可能性】
【0101】
以上、説明したように、本発明によれば、立体内視鏡システムに特有のストレスから手術スタッフを解放するとともに、質の高い施術を支援することができる新規な立体内視鏡システムが提供される。本発明の多視点裸眼立体内視鏡システムの普及により、外科手術がより高度な発展を遂げ、その結果、一人でも多くの命が救われることを期待する。
【符号の説明】
【0102】
100…多視点裸眼立体内視鏡システム
102…多視点ステレオ画像生成部
104…3Dデータ生成部
106…レンダリング部
108…奥行値算出部
200…眼鏡式立体内視鏡システム
201…ステレオカメラ
202…左目用カメラ
204…右目用カメラ
206…画像出力制御部
208…画像切替部
210…ディスプレイ
212…3Dメガネ
300…多視点裸眼立体ディスプレイ装置
302…レンチキュラーレンズアレイ
【特許請求の範囲】
【請求項1】
ステレオカメラと、該ステレオカメラによって取得されたステレオ画像に基づいて多視点ステレオ画像を生成する多視点ステレオ画像生成部と、該多視点ステレオ画像を表示するための多視点裸眼立体ディスプレイとを含む立体内視鏡システムであって、
多視点ステレオ画像生成部は、
前記ステレオカメラによって取得されたステレオ画像の画素毎の奥行値とRGB値を対応付けた3Dデータを生成する3Dデータ生成部と、
前記3Dデータに基づいて複数の仮想的な視点に対応する複数のステレオ画像が集約してなる多視点ステレオ画像を描画するレンダリング部と
を含む、
立体内視鏡システム。
【請求項2】
前記3Dデータ生成部は、奥行値算出部を含み、
前記奥行値算出部は、
前記ステレオ画像について動的計画法に基づくステレオマッチングを実行することにより画素毎の視差を取得し、該視差に基づいて画素毎の奥行値を算出する、
請求項1に記載の立体内視鏡システム。
【請求項3】
前記奥行値算出部は、
注目画素を含んで縦方向に連続する複数の画素を輝度値取得領域として定義し、該複数の画素の各画素について算出した輝度距離の平均値を前記ステレオマッチングにおけるコストとして定義する、
請求項1または2に記載の立体内視鏡システム。
【請求項4】
前記奥行値算出部は、
注目画素を含んで縦方向に連続する複数の画素を輝度値取得領域として定義し、該複数の画素の各画素について算出した輝度距離の平均値の累乗根を前記ステレオマッチングにおけるコストとして定義する、
請求項1または2に記載の立体内視鏡システム。
【請求項5】
前記奥行値算出部は、
エッジにまたがって延在しない前記輝度値取得領域を動的に定義する、
請求項3または4に記載の立体内視鏡システム。
【請求項6】
前記奥行値算出部は、
前記ステレオマッチングにおける斜め経路選択の重み係数が前記輝度距離の平均値の大きさに応じて大きくなるように設定する、
請求項3〜5のいずれか一項に記載の立体内視鏡システム。
【請求項7】
前記奥行値算出部は、
前記ステレオ画像において対象となる走査線を所定間隔毎に定義して該走査線上の各画素の視差を前記ステレオマッチングによって取得した上で、縦方向に存在する視差取得済みの2つの画素の間に位置する画素について、前記2つの画素の視差が変化しない場合には、前記2つの画素の間に位置する画素に前記2つの画素の視差を承継させ、前記2つの画素の視差が変化する場合には、前記2つの画素の間に位置する画素についてのみ新たに前記ステレオマッチングを行って視差を取得するといった一連の処理を実行する、
請求項2〜6のいずれか一項に記載の立体内視鏡システム。
【請求項8】
前記奥行値算出部は、
前記一連の処理を前記ステレオ画像の全画素の視差が取得されるまで再帰的に繰り返す、
請求項7に記載の立体内視鏡システム。
【請求項9】
ステレオ画像の各画素について視差を取得するために動的計画法に基づいてステレオマッチングを行う方法であって、
注目画素を含んで縦方向に連続する複数の画素を輝度値取得領域として定義し、該複数の画素の各画素について算出した輝度距離の平均値を前記ステレオマッチングにおけるコストとして定義することを特徴とする方法。
【請求項10】
ステレオ画像の各画素について視差を取得するために動的計画法に基づいてステレオマッチングを行う方法であって、
注目画素を含んで縦方向に連続する複数の画素を輝度値取得領域として定義し、該複数の画素の各画素について算出した輝度距離の平均値の累乗根を前記ステレオマッチングにおけるコストとして定義することを特徴とする方法。
【請求項11】
前記輝度値取得領域をエッジにまたがって延在しないように動的に定義することを特徴とする、請求項9または10に記載の方法。
【請求項12】
前記ステレオマッチングにおける斜め経路選択の重み係数が前記輝度距離の平均値の大きさに応じて大きくなるように設定することを特徴とする、請求項9〜11のいずれか一項に記載の方法。
【請求項13】
前記ステレオ画像において対象となる走査線を所定間隔毎に定義して該走査線上の各画素の視差を前記ステレオマッチングによって取得した上で、縦方向に存在する視差取得済みの2つの画素の間に位置する画素について、前記2つの画素の視差が変化しない場合には、前記2つの画素の間に位置する画素に前記2つの画素の視差を承継させ、前記2つの画素の視差が変化する場合には、前記2つの画素の間に位置する画素についてのみ新たに前記ステレオマッチングを行って視差を取得するといった一連の処理を実行することを特徴とする、請求項9〜12のいずれか一項に記載の方法。
【請求項14】
前記一連の処理を前記ステレオ画像の全画素の視差が取得されるまで再帰的に繰り返すことを特徴とする、請求項13に記載の方法。
【請求項1】
ステレオカメラと、該ステレオカメラによって取得されたステレオ画像に基づいて多視点ステレオ画像を生成する多視点ステレオ画像生成部と、該多視点ステレオ画像を表示するための多視点裸眼立体ディスプレイとを含む立体内視鏡システムであって、
多視点ステレオ画像生成部は、
前記ステレオカメラによって取得されたステレオ画像の画素毎の奥行値とRGB値を対応付けた3Dデータを生成する3Dデータ生成部と、
前記3Dデータに基づいて複数の仮想的な視点に対応する複数のステレオ画像が集約してなる多視点ステレオ画像を描画するレンダリング部と
を含む、
立体内視鏡システム。
【請求項2】
前記3Dデータ生成部は、奥行値算出部を含み、
前記奥行値算出部は、
前記ステレオ画像について動的計画法に基づくステレオマッチングを実行することにより画素毎の視差を取得し、該視差に基づいて画素毎の奥行値を算出する、
請求項1に記載の立体内視鏡システム。
【請求項3】
前記奥行値算出部は、
注目画素を含んで縦方向に連続する複数の画素を輝度値取得領域として定義し、該複数の画素の各画素について算出した輝度距離の平均値を前記ステレオマッチングにおけるコストとして定義する、
請求項1または2に記載の立体内視鏡システム。
【請求項4】
前記奥行値算出部は、
注目画素を含んで縦方向に連続する複数の画素を輝度値取得領域として定義し、該複数の画素の各画素について算出した輝度距離の平均値の累乗根を前記ステレオマッチングにおけるコストとして定義する、
請求項1または2に記載の立体内視鏡システム。
【請求項5】
前記奥行値算出部は、
エッジにまたがって延在しない前記輝度値取得領域を動的に定義する、
請求項3または4に記載の立体内視鏡システム。
【請求項6】
前記奥行値算出部は、
前記ステレオマッチングにおける斜め経路選択の重み係数が前記輝度距離の平均値の大きさに応じて大きくなるように設定する、
請求項3〜5のいずれか一項に記載の立体内視鏡システム。
【請求項7】
前記奥行値算出部は、
前記ステレオ画像において対象となる走査線を所定間隔毎に定義して該走査線上の各画素の視差を前記ステレオマッチングによって取得した上で、縦方向に存在する視差取得済みの2つの画素の間に位置する画素について、前記2つの画素の視差が変化しない場合には、前記2つの画素の間に位置する画素に前記2つの画素の視差を承継させ、前記2つの画素の視差が変化する場合には、前記2つの画素の間に位置する画素についてのみ新たに前記ステレオマッチングを行って視差を取得するといった一連の処理を実行する、
請求項2〜6のいずれか一項に記載の立体内視鏡システム。
【請求項8】
前記奥行値算出部は、
前記一連の処理を前記ステレオ画像の全画素の視差が取得されるまで再帰的に繰り返す、
請求項7に記載の立体内視鏡システム。
【請求項9】
ステレオ画像の各画素について視差を取得するために動的計画法に基づいてステレオマッチングを行う方法であって、
注目画素を含んで縦方向に連続する複数の画素を輝度値取得領域として定義し、該複数の画素の各画素について算出した輝度距離の平均値を前記ステレオマッチングにおけるコストとして定義することを特徴とする方法。
【請求項10】
ステレオ画像の各画素について視差を取得するために動的計画法に基づいてステレオマッチングを行う方法であって、
注目画素を含んで縦方向に連続する複数の画素を輝度値取得領域として定義し、該複数の画素の各画素について算出した輝度距離の平均値の累乗根を前記ステレオマッチングにおけるコストとして定義することを特徴とする方法。
【請求項11】
前記輝度値取得領域をエッジにまたがって延在しないように動的に定義することを特徴とする、請求項9または10に記載の方法。
【請求項12】
前記ステレオマッチングにおける斜め経路選択の重み係数が前記輝度距離の平均値の大きさに応じて大きくなるように設定することを特徴とする、請求項9〜11のいずれか一項に記載の方法。
【請求項13】
前記ステレオ画像において対象となる走査線を所定間隔毎に定義して該走査線上の各画素の視差を前記ステレオマッチングによって取得した上で、縦方向に存在する視差取得済みの2つの画素の間に位置する画素について、前記2つの画素の視差が変化しない場合には、前記2つの画素の間に位置する画素に前記2つの画素の視差を承継させ、前記2つの画素の視差が変化する場合には、前記2つの画素の間に位置する画素についてのみ新たに前記ステレオマッチングを行って視差を取得するといった一連の処理を実行することを特徴とする、請求項9〜12のいずれか一項に記載の方法。
【請求項14】
前記一連の処理を前記ステレオ画像の全画素の視差が取得されるまで再帰的に繰り返すことを特徴とする、請求項13に記載の方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【公開番号】特開2012−65851(P2012−65851A)
【公開日】平成24年4月5日(2012.4.5)
【国際特許分類】
【出願番号】特願2010−213209(P2010−213209)
【出願日】平成22年9月24日(2010.9.24)
【出願人】(599011687)学校法人 中央大学 (110)
【Fターム(参考)】
【公開日】平成24年4月5日(2012.4.5)
【国際特許分類】
【出願日】平成22年9月24日(2010.9.24)
【出願人】(599011687)学校法人 中央大学 (110)
【Fターム(参考)】
[ Back to top ]