
多重経路イメージ・スキャナのための方法、システムおよび装置
【課題】複数の経路イメージ・スキャナを使用して光学コードを読み取るための装置、方法およびシステムを提供する。
【解決手段】複数の画像を取り込むために動作することができる画像取込装置と、それぞれが、焦点面に画像光路を提供するように整合している複数のミラーと、画像を各画像光路から前記画像取込装置に向けるために動作することができる経路方向付け装置と、前記画像取込装置に前記各画像光路からの前記画像を取り込ませ、1つまたは複数の取り込んだ画像を使用して前記光学コードを復号させることができる処理回路とを備える。
【解決手段】複数の画像を取り込むために動作することができる画像取込装置と、それぞれが、焦点面に画像光路を提供するように整合している複数のミラーと、画像を各画像光路から前記画像取込装置に向けるために動作することができる経路方向付け装置と、前記画像取込装置に前記各画像光路からの前記画像を取り込ませ、1つまたは複数の取り込んだ画像を使用して前記光学コードを復号させることができる処理回路とを備える。
【発明の詳細な説明】
【技術分野】
【0001】
本明細書に記載する装置は、概して、光学コードを読み取るためのイメージ・スキャナに関する。
【背景技術】
【0002】
イメージ・スキャナは、光学コードの画像を取り込むために電荷結合素子(CCD)または相補型金属酸化物半導体(CMOS)をベースとする画像取込装置を使用する。いったん取り込むと、光学コードを復号するために画像が処理される。イメージ・スキャナは、光学コードを見るための限定された被写界深度および視野の幅を有する。正しい方向を向いていて、画像取込装置の被写界深度および視野の幅の要件内に位置する光学コードだけを、光学コードを復号するのに必要な明瞭度で取り込むことができる。(画像からの光学コードの復号は、光学コードの読取りと呼ばれる。)被写界深度および視野の幅の外側のまたは画像取込装置の方向に正しく向いていない光学コードは読み取ることができない。何故なら、光学コードの復号可能な画像を取り込むことができないからである。被写界深度および視野の幅の大部分は、画像取込装置上に画像を向けるために使用する光学系、および光学コードを照明するために使用することができる光により決まる。
【発明の開示】
【発明が解決しようとする課題】
【0003】
光学系に焦点調整を行う機能を追加すれば、被写界深度および視野の幅を変化させることができるが、光学系を移動するのに時間がかかり、追加の被写界深度および視野の幅が必要なエリアをカバーするのに十分でない場合がある。その上、このアプローチは、光学コードが光学系の方向を正しく向いていないか、または移動中である状況を解決しない。それ故、また、多くの異なる角度からの光学コードの画像を取り込むことができる状態で、取込時間を増大しないでまたは移動に対する感度を増大しないで、撮像装置の被写界深度および視野の幅を増大できることが望ましい。
【課題を解決するための手段】
【0004】
このため、本発明は、複数の画像を取り込むために動作することができる画像取込装置と、それぞれが、焦点面に画像光路を提供するように整合している複数のミラーと、画像を各画像光路から前記画像取込装置に向けるために動作することができる経路方向付け装置と、前記画像取込装置に前記各画像光路からの前記画像を取り込ませ、1つまたは複数の取り込んだ画像を使用して前記光学コードを復号させることができる処理回路とを備える光学コードを走査するための多重経路イメージ・スキャナ装置を提供するためのものである。
【発明を実施するための最良の形態】
【0005】
以下の説明においては、本発明を理解してもらうために多数の詳細な点について説明する。しかし、当業者であれば、本発明は、これらの詳細な点がなくても実行することができること、上記実施形態を種々に変更または修正することができることを理解することができるだろう。
【0006】
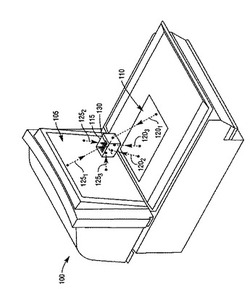
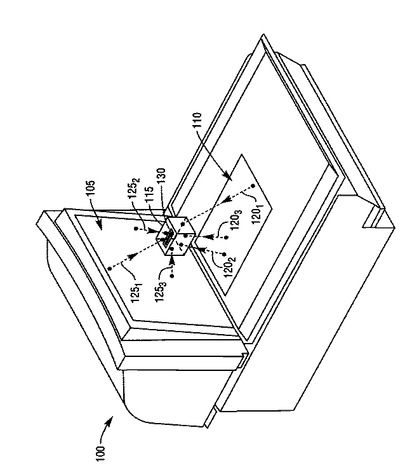
ここで図1を参照すると、この図は、光学コードを走査するために使用する多重経路イメージ・スキャナ装置100の一実施形態の例示としての図面である。この実施形態の場合には、ボックス115は、水平走査窓110上および垂直走査窓105の前を移動する。ボックス115は、頂部面に印刷または貼付されている光学コード130を有する。この実施形態の場合には、光学コードは、バーコード130である。他の実施形態の場合には、光学コードは、テキスト、数字または記号を含む他のタイプの光学コードであってもよい。さらに、光学コードは、2つ以上のタイプのコードの組合せも含むことができる。光学コードは、ボックス115の任意の表面におよび任意の方向に置くことができる。さらに、ボックス115の1つの側面は複数の光学コードを有することができる。
【0007】
水平走査窓110は、透明であり、1つまたは複数の画像光路1201−3は、水平走査窓110を通って水平走査窓110の上の1つまたは複数の焦点面から延びることができる。画像光路1201−3は、水平走査窓110を通ってほぼ垂直方向にまたは上方に延びる。いくつかの画像経路は、水平走査窓110に対して鋭角を形成するが、依然として水平走査窓110を通過する限りは、水平走査窓110からほぼ上方またはほぼ垂直方向に延びる。
【0008】
同様に、垂直走査窓105も透明で、1つまたは複数の画像光路1251−3は、垂直走査窓を通って垂直査窓105の前の1つまたは複数の焦点面から延びることができる。画像光路1251−3は、垂直走査窓105からほぼ水平方向に延びる。いくつかの画像経路は、垂直走査窓115に対して鋭角を形成するが、依然として垂直走査窓115を通過する限りは、垂直走査窓115からほぼ水平方向に延びる。
【0009】
6つの画像光路1201−3および1251−3は、一緒にボックス115の6つの各側面に画像閲覧経路を提供する。1つの通過(pass−by)によりボックス115の6つのすべての側面を撮像する機能により、任意の側面上に位置するバーコードを1回で読み取ることができる確率が大きく改善する。異なる用途のために修正した他の実施形態は、追加の画像光路を組み込んでいて、一方、さらに他の実施形態は、もっと少ない画像光路を有する。さらに、等しい数の画像光路が垂直および水平走査窓を通過しなくてもよい。ある実施形態は、垂直または水平走査窓を有することができるが、両方を含んでいなくてもよい。さらに他の実施形態の場合には、3つ以上の走査窓を使用している。
【0010】
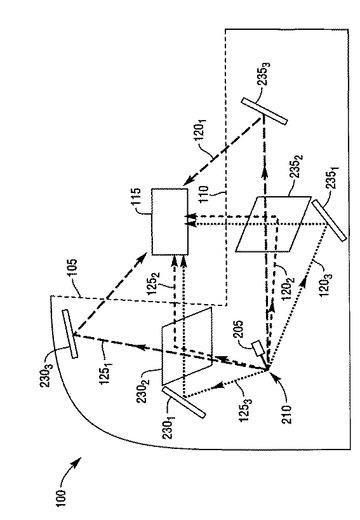
図2は、画像走査装置100の断面図である。経路方向付け装置210が、画像取込装置205の方向に画像光路1201−3および1251−3それぞれを向けるために使用される。経路方向付け装置210は、回転可能な多角形である。経路方向付け装置210の側面は、光反射性であり、画像取込装置205の方向に画像光路1201−3、1251−3のうちの1つ以上を向けるために幾何学的に整合している。他の実施形態の場合には、経路方向付け装置210のすべての側面が反射性であるわけではない。経路方向付け装置210の各360度の回転中に、各画像光路1201−3、1251−3は、経路方向付け装置210の1つまたは複数の側面により画像取込装置205の方を向く。ある実施形態の場合には、経路方向付け装置210の反射性側面は、画像光路をある方向に向けるばかりでなく、合焦機能も提供する。これらの実施形態の場合には、画像光路1201−3、1251−3を画像取込装置205の方向に向け、焦点を合わせる凹面ミラーまたは凸面ミラーである。ある実施形態の場合には、経路方向付け装置210は、画像光路1201−3、1251−3を画像取込装置205の方向に向け、焦点を合わせる凹状または凸状屈折面である側面を有するプリズムである。さらに他の実施形態の場合には、経路方向付け装置210は、マイクロミラーを移動することにより画像経路をある方向に向けることができるマイクロミラー・アレイのようなMEMS(マイクロ電気機械システム)である。
【0011】
経路方向付け装置210上の反射面の他に、ミラー2301−3、2351−3は、さらにその焦点面からの各画像光路を経路方向付け装置210に向けるために整合される。ミラー2351−3は、画像光路1201−3を、水平走査窓110を通して経路方向付け装置210に向けるために使用される。同様に、ミラー2301−3は、画像光路1251−3を、垂直走査窓105を通して経路方向付け装置210に向けるために使用される。ある実施形態の場合には、追加のミラーを使用しないで、経路方向付け装置210だけにより少なくとも1つの画像経路を整合し、またある方向に向けることができる。ある実施形態の場合には、1つまたは複数のミラー2301−3、2351−3は、経路方向付け装置210に画像光路を向け、焦点を合わせるために整合している凹面ミラーまたは凸面ミラーである。
【0012】
ある実施形態の場合には、集束光学系(図示せず)は、経路方向付け装置210と画像取込装置205との間に位置する。集束光学系は、画像取込装置205上にある方向に向けられた画像経路の焦点を合わせる1つまたは複数の凹レンズおよび凸レンズである。
【0013】
6つの画像光路1201−3、1251−3は、ボックス115が正しい位置に位置した場合に、ボックス115の6つの各側面が見られるように、画像取込装置205を提供する。他の実施形態の場合には、被写界深度または視野の幅を増大するために、1つまたは複数の追加の画像光路が追加される。ある実施形態の場合には、ボックス115の同じ側面が見えるように複数の画像光路が配置される。同じ側面に複数の画像光路を整合すると、見ているボックス115の側面の被写界深度および/または視野の幅が増大する。ある場合には、画像光路は、相互に隣接するエリアが見えるように整合していて、そのため視野の幅が増大する。他の場合には、画像光路は、異なる距離または角度でエリアが見えるように整合していて、そのため被写界深度が増大する。さらに他の場合には、追加の画像光路は、被写界深度および視野の幅の両方を増大することができる。被写界深度および/または視野の幅が増大すると、1つまたは複数の取り込んだ画像が光学コードの復号可能な画像を含む確率が増大する。
【0014】
画像取込装置205は、それに向けられた画像を取り込み、次に、さらなる処理および光学コードの復号のためにこの画像を転送するように設計されている。画像取込装置205を実施するために多数の異なる技術を使用することができる。2つの例示としての技術としては、電荷結合素子(CCD)および相補型金属酸化物半導体(CMOS)がある。両方の技術は、光を電荷に変換することにより動作する。次に、電荷は電子信号に処理される。電子信号は、取り込んだ画像のデジタル表示を形成するためにさらに処理される。上記各技術は、いくつかの利点およびトレードオフを有し、画像取込装置205として機能するようにすることができる。
【0015】
経路方向付け装置210の回転速度は、画像取込装置205が画像を取り込むことができる速度、または場合によっては画像取込装置205の露出時間と呼ばれるものにより決まる。典型的なレーザをベースとする光学コード・スキャナは、5,000〜10,000RPMで回転する経路方向付け装置を有する。レーザ・スキャナは、反射したレーザ・ビームを検出するためのレーザの周波数に同調している簡単な光検出装置(ホトダイオード)を使用する。しかし、画像を取り込むプロセスは、レーザ光の有無を単に検出するよりも時間がかかる。それ故、長い時間画像を画像取込装置205の方向に向けなければならない。そのため経路方向付け装置210の回転を遅くする必要がある。画像取込装置205を実施するために使用する技術および撮像されるオブジェクトの最大許容相対モーメント(通過速度(pass by speed))により、経路方向付け装置210の回転速度は、約500〜720RPMの間で変化する。このことは、光学コードに対して最大毎秒72インチの通過速度を仮定する。イメージ・スキャナの経路方向付け装置210の回転速度が遅くなると、低い音響ノイズおよび振動が発生し、レーザ・スキャナで使用する経路方向付け装置よりも少ない電力しか消費しない。画像取込装置205に対して他の技術または改善した技術を使用する他の実施形態は、撮像技術の要件を満たすもっと速いまたはもっと遅いRPM速度を使用することができる。
【0016】
経路方向付け装置210の回転速度は、また、ボックス115から反射される光の量により制限される。反射光のレベルが相対的に低いと、もっと遅い回転速度かまたはもっと感度のいい画像取込装置205が必要になる。ある環境においては、ボックス115を照明するのに周囲の光で十分であるが、他の環境の場合には追加の光源が必要になる。ある実施形態の場合には、光源すなわちLEDは、イメージ・スキャナ・システム100の内部に設置されるので、LEDが放射した光は、水平および/または垂直走査窓を通ってボックス115を照明する。LEDは、連続的に動作することもできるし、またはパルスのために一定時間動作するようにすることもできるので、経路方向付け装置210が、そのエリアからの画像を画像取込装置205の方に向けた場合に、LEDは上記エリアを照明する。他の実施形態の場合には、エリアを直接照明するために光源はイメージ・スキャナ・システム100のハウジング内に設置される。
【0017】
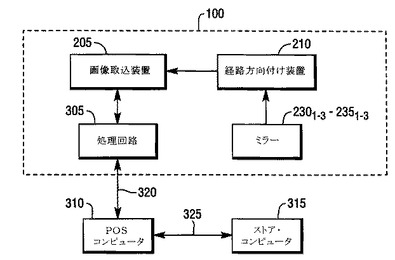
図3は、例示としてのイメージ・スキャナ・システムの高レベル・ブロック図である。イメージ・スキャナ装置100は、画像光路を経路方向付け装置210の方向に向け、次に、画像取込装置205の方向に向けるように整合しているミラー2301−3、2351−3を含む。処理回路305は、画像取込装置205を制御する。処理回路305は、プロセッサと、メモリと、プログラム・コードとを含む。プログラム・コードは、プロセッサにより実行された場合、画像取込装置205を制御し、画像取込装置205が取り込んだ画像を受信し、処理するために処理回路305にコマンドを発行させる。画像内で光学コードを検出した場合には、光学コードに関連する情報が、処理回路により復号され、POSコンピュータ310に送られる。光学コードは、バーコードであるが、他の実施形態は、テキスト、数字または記号のような異なるタイプのコードを使用する。他の実施形態の場合には、処理回路305は、画像をPOSコンピュータのような他の処理回路に送り、この処理回路は、次に、光学コードを検出するために画像を処理する。さらに他の実施形態の場合には、画像を処理するためにPOSコンピュータを使用しないで、代わりに汎用コンピュータまたは画像を処理するために設計したコンピュータを使用する。バーコード情報は、ストア・コンピュータ315に送られ、このコンピュータは識別したバーコードに関する情報をルックアップする。次に、価格のような情報は、表示またはさらに使用するためにPOSコンピュータ310に送られる。
【0018】
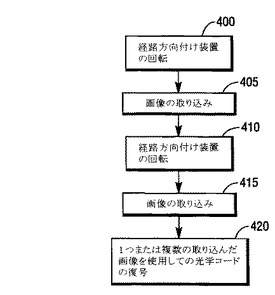
図4は、イメージ・スキャナ装置を使用する光学コードを走査するための例示としての方法の高レベル・フローチャートである。ステップ400において、経路方向付け装置210は、画像が経路方向付け装置210から画像取込装置205に反射するように画像光路が整合している位置に回転する。ステップ405において、処理回路305は、経路方向付け装置210の位置を検出し、画像取込装置205に画像を取り込ませる。ステップ410において、経路方向付け装置210は、画像が経路方向付け装置210から画像取込装置205に反射するように他の画像光路が整合している位置に回転する。ステップ415において、処理回路305は経路方向付け装置210の位置を検出し、画像取込装置205に画像を取り込ませる。ある実施形態の場合には、経路方向付け装置210を検出する装置は、経路方向付け装置210の位置を決定するために使用されるので、画像を取り込む場合に使用される。他の実施形態の場合には、経路方向付け装置210が回転する間に少なくとも1回画像光路が校正画像の方を向くように、校正画像がイメージ・スキャナ装置100内に位置する。処理回路305は、最初に、校正画像を検出するまで画像を連続的に取り込むことにより、経路方向付け装置210の位置を検出する。経路方向付け装置210の数回の回転中に校正画像を検出した後で、処理回路305は、経路方向付け装置210の速度および位置を決定することができ、経路方向付け装置210が画像経路を画像取込装置205と整合させるある位置に位置する時間を予測することができる。経路方向付け装置210の予測位置の精度を維持するために、校正画像の画像が周期的に採取される。ステップ420において、処理回路305は、1つまたは複数の取り込んだ画像を使用して光学コードを復号する。
【0019】
いくつかの好ましい実施形態を特に参照しながら本発明を説明してきたが、添付の特許請求の範囲の精神および範囲から逸脱することなしに、本発明を種々に変更および修正することができる。例えば、他の実施形態の場合には、画像走査装置100は、2つ以上の画像取込装置を有し、各画像取込装置は、それに向いている画像光路に一意に焦点を合わせる集束光学系を有する。これにより各画像取込装置は、同じ画像光路を使用していても、異なる距離のところに焦点を合わせることができ、そのため被写界深度が増大する。さらに、いくつかの実施形態は、2つ以上の経路方向付け装置を有する。複数の経路方向付け装置を有するある実施形態の場合には、経路方向付け装置のうちの1つが水平窓からの経路をある方向に向け、他の経路方向付け装置が、垂直窓からの経路をある方向に向ける。ある場合には、経路方向付け装置は、経路をある方向に向けるために追加のミラーを必要としない。
【図面の簡単な説明】
【0020】
【図1】多重経路イメージ・スキャナの一実施形態の図面である。
【図2】多重経路イメージ・スキャナの一実施形態の断面図である。
【図3】例示としての撮像スキャナ・システムの高レベル・ブロック図である。
【図4】撮像スキャナ装置を使用する光学コードを走査するための例示としての方法を示す高レベル・フローチャートである。
【技術分野】
【0001】
本明細書に記載する装置は、概して、光学コードを読み取るためのイメージ・スキャナに関する。
【背景技術】
【0002】
イメージ・スキャナは、光学コードの画像を取り込むために電荷結合素子(CCD)または相補型金属酸化物半導体(CMOS)をベースとする画像取込装置を使用する。いったん取り込むと、光学コードを復号するために画像が処理される。イメージ・スキャナは、光学コードを見るための限定された被写界深度および視野の幅を有する。正しい方向を向いていて、画像取込装置の被写界深度および視野の幅の要件内に位置する光学コードだけを、光学コードを復号するのに必要な明瞭度で取り込むことができる。(画像からの光学コードの復号は、光学コードの読取りと呼ばれる。)被写界深度および視野の幅の外側のまたは画像取込装置の方向に正しく向いていない光学コードは読み取ることができない。何故なら、光学コードの復号可能な画像を取り込むことができないからである。被写界深度および視野の幅の大部分は、画像取込装置上に画像を向けるために使用する光学系、および光学コードを照明するために使用することができる光により決まる。
【発明の開示】
【発明が解決しようとする課題】
【0003】
光学系に焦点調整を行う機能を追加すれば、被写界深度および視野の幅を変化させることができるが、光学系を移動するのに時間がかかり、追加の被写界深度および視野の幅が必要なエリアをカバーするのに十分でない場合がある。その上、このアプローチは、光学コードが光学系の方向を正しく向いていないか、または移動中である状況を解決しない。それ故、また、多くの異なる角度からの光学コードの画像を取り込むことができる状態で、取込時間を増大しないでまたは移動に対する感度を増大しないで、撮像装置の被写界深度および視野の幅を増大できることが望ましい。
【課題を解決するための手段】
【0004】
このため、本発明は、複数の画像を取り込むために動作することができる画像取込装置と、それぞれが、焦点面に画像光路を提供するように整合している複数のミラーと、画像を各画像光路から前記画像取込装置に向けるために動作することができる経路方向付け装置と、前記画像取込装置に前記各画像光路からの前記画像を取り込ませ、1つまたは複数の取り込んだ画像を使用して前記光学コードを復号させることができる処理回路とを備える光学コードを走査するための多重経路イメージ・スキャナ装置を提供するためのものである。
【発明を実施するための最良の形態】
【0005】
以下の説明においては、本発明を理解してもらうために多数の詳細な点について説明する。しかし、当業者であれば、本発明は、これらの詳細な点がなくても実行することができること、上記実施形態を種々に変更または修正することができることを理解することができるだろう。
【0006】
ここで図1を参照すると、この図は、光学コードを走査するために使用する多重経路イメージ・スキャナ装置100の一実施形態の例示としての図面である。この実施形態の場合には、ボックス115は、水平走査窓110上および垂直走査窓105の前を移動する。ボックス115は、頂部面に印刷または貼付されている光学コード130を有する。この実施形態の場合には、光学コードは、バーコード130である。他の実施形態の場合には、光学コードは、テキスト、数字または記号を含む他のタイプの光学コードであってもよい。さらに、光学コードは、2つ以上のタイプのコードの組合せも含むことができる。光学コードは、ボックス115の任意の表面におよび任意の方向に置くことができる。さらに、ボックス115の1つの側面は複数の光学コードを有することができる。
【0007】
水平走査窓110は、透明であり、1つまたは複数の画像光路1201−3は、水平走査窓110を通って水平走査窓110の上の1つまたは複数の焦点面から延びることができる。画像光路1201−3は、水平走査窓110を通ってほぼ垂直方向にまたは上方に延びる。いくつかの画像経路は、水平走査窓110に対して鋭角を形成するが、依然として水平走査窓110を通過する限りは、水平走査窓110からほぼ上方またはほぼ垂直方向に延びる。
【0008】
同様に、垂直走査窓105も透明で、1つまたは複数の画像光路1251−3は、垂直走査窓を通って垂直査窓105の前の1つまたは複数の焦点面から延びることができる。画像光路1251−3は、垂直走査窓105からほぼ水平方向に延びる。いくつかの画像経路は、垂直走査窓115に対して鋭角を形成するが、依然として垂直走査窓115を通過する限りは、垂直走査窓115からほぼ水平方向に延びる。
【0009】
6つの画像光路1201−3および1251−3は、一緒にボックス115の6つの各側面に画像閲覧経路を提供する。1つの通過(pass−by)によりボックス115の6つのすべての側面を撮像する機能により、任意の側面上に位置するバーコードを1回で読み取ることができる確率が大きく改善する。異なる用途のために修正した他の実施形態は、追加の画像光路を組み込んでいて、一方、さらに他の実施形態は、もっと少ない画像光路を有する。さらに、等しい数の画像光路が垂直および水平走査窓を通過しなくてもよい。ある実施形態は、垂直または水平走査窓を有することができるが、両方を含んでいなくてもよい。さらに他の実施形態の場合には、3つ以上の走査窓を使用している。
【0010】
図2は、画像走査装置100の断面図である。経路方向付け装置210が、画像取込装置205の方向に画像光路1201−3および1251−3それぞれを向けるために使用される。経路方向付け装置210は、回転可能な多角形である。経路方向付け装置210の側面は、光反射性であり、画像取込装置205の方向に画像光路1201−3、1251−3のうちの1つ以上を向けるために幾何学的に整合している。他の実施形態の場合には、経路方向付け装置210のすべての側面が反射性であるわけではない。経路方向付け装置210の各360度の回転中に、各画像光路1201−3、1251−3は、経路方向付け装置210の1つまたは複数の側面により画像取込装置205の方を向く。ある実施形態の場合には、経路方向付け装置210の反射性側面は、画像光路をある方向に向けるばかりでなく、合焦機能も提供する。これらの実施形態の場合には、画像光路1201−3、1251−3を画像取込装置205の方向に向け、焦点を合わせる凹面ミラーまたは凸面ミラーである。ある実施形態の場合には、経路方向付け装置210は、画像光路1201−3、1251−3を画像取込装置205の方向に向け、焦点を合わせる凹状または凸状屈折面である側面を有するプリズムである。さらに他の実施形態の場合には、経路方向付け装置210は、マイクロミラーを移動することにより画像経路をある方向に向けることができるマイクロミラー・アレイのようなMEMS(マイクロ電気機械システム)である。
【0011】
経路方向付け装置210上の反射面の他に、ミラー2301−3、2351−3は、さらにその焦点面からの各画像光路を経路方向付け装置210に向けるために整合される。ミラー2351−3は、画像光路1201−3を、水平走査窓110を通して経路方向付け装置210に向けるために使用される。同様に、ミラー2301−3は、画像光路1251−3を、垂直走査窓105を通して経路方向付け装置210に向けるために使用される。ある実施形態の場合には、追加のミラーを使用しないで、経路方向付け装置210だけにより少なくとも1つの画像経路を整合し、またある方向に向けることができる。ある実施形態の場合には、1つまたは複数のミラー2301−3、2351−3は、経路方向付け装置210に画像光路を向け、焦点を合わせるために整合している凹面ミラーまたは凸面ミラーである。
【0012】
ある実施形態の場合には、集束光学系(図示せず)は、経路方向付け装置210と画像取込装置205との間に位置する。集束光学系は、画像取込装置205上にある方向に向けられた画像経路の焦点を合わせる1つまたは複数の凹レンズおよび凸レンズである。
【0013】
6つの画像光路1201−3、1251−3は、ボックス115が正しい位置に位置した場合に、ボックス115の6つの各側面が見られるように、画像取込装置205を提供する。他の実施形態の場合には、被写界深度または視野の幅を増大するために、1つまたは複数の追加の画像光路が追加される。ある実施形態の場合には、ボックス115の同じ側面が見えるように複数の画像光路が配置される。同じ側面に複数の画像光路を整合すると、見ているボックス115の側面の被写界深度および/または視野の幅が増大する。ある場合には、画像光路は、相互に隣接するエリアが見えるように整合していて、そのため視野の幅が増大する。他の場合には、画像光路は、異なる距離または角度でエリアが見えるように整合していて、そのため被写界深度が増大する。さらに他の場合には、追加の画像光路は、被写界深度および視野の幅の両方を増大することができる。被写界深度および/または視野の幅が増大すると、1つまたは複数の取り込んだ画像が光学コードの復号可能な画像を含む確率が増大する。
【0014】
画像取込装置205は、それに向けられた画像を取り込み、次に、さらなる処理および光学コードの復号のためにこの画像を転送するように設計されている。画像取込装置205を実施するために多数の異なる技術を使用することができる。2つの例示としての技術としては、電荷結合素子(CCD)および相補型金属酸化物半導体(CMOS)がある。両方の技術は、光を電荷に変換することにより動作する。次に、電荷は電子信号に処理される。電子信号は、取り込んだ画像のデジタル表示を形成するためにさらに処理される。上記各技術は、いくつかの利点およびトレードオフを有し、画像取込装置205として機能するようにすることができる。
【0015】
経路方向付け装置210の回転速度は、画像取込装置205が画像を取り込むことができる速度、または場合によっては画像取込装置205の露出時間と呼ばれるものにより決まる。典型的なレーザをベースとする光学コード・スキャナは、5,000〜10,000RPMで回転する経路方向付け装置を有する。レーザ・スキャナは、反射したレーザ・ビームを検出するためのレーザの周波数に同調している簡単な光検出装置(ホトダイオード)を使用する。しかし、画像を取り込むプロセスは、レーザ光の有無を単に検出するよりも時間がかかる。それ故、長い時間画像を画像取込装置205の方向に向けなければならない。そのため経路方向付け装置210の回転を遅くする必要がある。画像取込装置205を実施するために使用する技術および撮像されるオブジェクトの最大許容相対モーメント(通過速度(pass by speed))により、経路方向付け装置210の回転速度は、約500〜720RPMの間で変化する。このことは、光学コードに対して最大毎秒72インチの通過速度を仮定する。イメージ・スキャナの経路方向付け装置210の回転速度が遅くなると、低い音響ノイズおよび振動が発生し、レーザ・スキャナで使用する経路方向付け装置よりも少ない電力しか消費しない。画像取込装置205に対して他の技術または改善した技術を使用する他の実施形態は、撮像技術の要件を満たすもっと速いまたはもっと遅いRPM速度を使用することができる。
【0016】
経路方向付け装置210の回転速度は、また、ボックス115から反射される光の量により制限される。反射光のレベルが相対的に低いと、もっと遅い回転速度かまたはもっと感度のいい画像取込装置205が必要になる。ある環境においては、ボックス115を照明するのに周囲の光で十分であるが、他の環境の場合には追加の光源が必要になる。ある実施形態の場合には、光源すなわちLEDは、イメージ・スキャナ・システム100の内部に設置されるので、LEDが放射した光は、水平および/または垂直走査窓を通ってボックス115を照明する。LEDは、連続的に動作することもできるし、またはパルスのために一定時間動作するようにすることもできるので、経路方向付け装置210が、そのエリアからの画像を画像取込装置205の方に向けた場合に、LEDは上記エリアを照明する。他の実施形態の場合には、エリアを直接照明するために光源はイメージ・スキャナ・システム100のハウジング内に設置される。
【0017】
図3は、例示としてのイメージ・スキャナ・システムの高レベル・ブロック図である。イメージ・スキャナ装置100は、画像光路を経路方向付け装置210の方向に向け、次に、画像取込装置205の方向に向けるように整合しているミラー2301−3、2351−3を含む。処理回路305は、画像取込装置205を制御する。処理回路305は、プロセッサと、メモリと、プログラム・コードとを含む。プログラム・コードは、プロセッサにより実行された場合、画像取込装置205を制御し、画像取込装置205が取り込んだ画像を受信し、処理するために処理回路305にコマンドを発行させる。画像内で光学コードを検出した場合には、光学コードに関連する情報が、処理回路により復号され、POSコンピュータ310に送られる。光学コードは、バーコードであるが、他の実施形態は、テキスト、数字または記号のような異なるタイプのコードを使用する。他の実施形態の場合には、処理回路305は、画像をPOSコンピュータのような他の処理回路に送り、この処理回路は、次に、光学コードを検出するために画像を処理する。さらに他の実施形態の場合には、画像を処理するためにPOSコンピュータを使用しないで、代わりに汎用コンピュータまたは画像を処理するために設計したコンピュータを使用する。バーコード情報は、ストア・コンピュータ315に送られ、このコンピュータは識別したバーコードに関する情報をルックアップする。次に、価格のような情報は、表示またはさらに使用するためにPOSコンピュータ310に送られる。
【0018】
図4は、イメージ・スキャナ装置を使用する光学コードを走査するための例示としての方法の高レベル・フローチャートである。ステップ400において、経路方向付け装置210は、画像が経路方向付け装置210から画像取込装置205に反射するように画像光路が整合している位置に回転する。ステップ405において、処理回路305は、経路方向付け装置210の位置を検出し、画像取込装置205に画像を取り込ませる。ステップ410において、経路方向付け装置210は、画像が経路方向付け装置210から画像取込装置205に反射するように他の画像光路が整合している位置に回転する。ステップ415において、処理回路305は経路方向付け装置210の位置を検出し、画像取込装置205に画像を取り込ませる。ある実施形態の場合には、経路方向付け装置210を検出する装置は、経路方向付け装置210の位置を決定するために使用されるので、画像を取り込む場合に使用される。他の実施形態の場合には、経路方向付け装置210が回転する間に少なくとも1回画像光路が校正画像の方を向くように、校正画像がイメージ・スキャナ装置100内に位置する。処理回路305は、最初に、校正画像を検出するまで画像を連続的に取り込むことにより、経路方向付け装置210の位置を検出する。経路方向付け装置210の数回の回転中に校正画像を検出した後で、処理回路305は、経路方向付け装置210の速度および位置を決定することができ、経路方向付け装置210が画像経路を画像取込装置205と整合させるある位置に位置する時間を予測することができる。経路方向付け装置210の予測位置の精度を維持するために、校正画像の画像が周期的に採取される。ステップ420において、処理回路305は、1つまたは複数の取り込んだ画像を使用して光学コードを復号する。
【0019】
いくつかの好ましい実施形態を特に参照しながら本発明を説明してきたが、添付の特許請求の範囲の精神および範囲から逸脱することなしに、本発明を種々に変更および修正することができる。例えば、他の実施形態の場合には、画像走査装置100は、2つ以上の画像取込装置を有し、各画像取込装置は、それに向いている画像光路に一意に焦点を合わせる集束光学系を有する。これにより各画像取込装置は、同じ画像光路を使用していても、異なる距離のところに焦点を合わせることができ、そのため被写界深度が増大する。さらに、いくつかの実施形態は、2つ以上の経路方向付け装置を有する。複数の経路方向付け装置を有するある実施形態の場合には、経路方向付け装置のうちの1つが水平窓からの経路をある方向に向け、他の経路方向付け装置が、垂直窓からの経路をある方向に向ける。ある場合には、経路方向付け装置は、経路をある方向に向けるために追加のミラーを必要としない。
【図面の簡単な説明】
【0020】
【図1】多重経路イメージ・スキャナの一実施形態の図面である。
【図2】多重経路イメージ・スキャナの一実施形態の断面図である。
【図3】例示としての撮像スキャナ・システムの高レベル・ブロック図である。
【図4】撮像スキャナ装置を使用する光学コードを走査するための例示としての方法を示す高レベル・フローチャートである。
【特許請求の範囲】
【請求項1】
複数の画像を取り込むために動作することができる画像取込装置と、
それぞれが、焦点面に画像光路を提供するように整合している複数のミラーと、
画像を各画像光路から前記画像取込装置に向けるために動作することができる経路方向付け装置と、
前記画像取込装置に前記各画像光路からの前記画像を取り込ませ、1つまたは複数の取り込んだ画像を使用して前記光学コードを復号させることができる処理回路とを備える光学コードを走査するための多重経路イメージ・スキャナ装置。
【請求項2】
前記経路方向付け装置が多角形である、請求項1に記載の装置。
【請求項3】
前記経路方向付け装置が少なくとも1つの反射面を有する、請求項2に記載の装置。
【請求項4】
前記経路方向付け装置が回転する、請求項3に記載の装置。
【請求項5】
前記処理回路が、前記経路方向付け装置に対する位置情報を検出し、前記画像取込装置に前記画像を取り込ませる時間を決定するために前記位置情報を使用することができる、請求項1に記載の装置。
【請求項6】
前記処理回路が、校正画像を使用して前記経路方向付け装置の位置を決定する、請求項5に記載の装置。
【請求項7】
前記処理回路が、1つまたは複数の前記取り込んだ画像を格納することができる、請求項1に記載の装置。
【請求項8】
前記光学コードがバーコードを含む、請求項1に記載の装置。
【請求項9】
前記光学コードが英数字のテキストを含む、請求項1に記載の装置。
【請求項10】
前記複数のミラーのうちの少なくとも1つが整合していて、そのため前記ミラーから延びる前記光路が、ほぼ垂直方向を向いている、請求項1に記載の装置。
【請求項11】
前記複数のミラーのうちの少なくとも1つが整合していて、そのため前記ミラーから延びる前記光路が、ほぼ水平方向を向いている、請求項1に記載の装置。
【請求項12】
前記処理回路が、他の処理回路により前記光学コードを復号させる、請求項1に記載の装置。
【請求項13】
第1のミラーから画像取込装置に第1の画像を反射するために経路方向付け装置を第1の位置に回転させるステップと、
前記画像取込装置に前記第1の画像を取り込ませるステップと、
第2のミラーから画像取込装置に第2の画像を反射するために前記経路方向付け装置を第2の位置に回転させるステップと、
前記画像取込装置に前記第2の画像を取り込ませるステップと、
前記第1および第2の画像の一方または両方を処理することにより光学コードを復号するステップとを含む光学コード走査方法。
方法。
【請求項14】
前記経路方向付け装置が多角形である、請求項13に記載の方法。
【請求項15】
前記経路方向付け装置が少なくとも1つの反射面を有する、請求項14に記載の方法。
【請求項16】
前記光学コードがバーコードを含む、請求項13に記載の方法。
【請求項17】
前記光学コードが英数字のテキストを含む、請求項13に記載の方法。
【請求項18】
前記第1のミラーが整合していて、そのため前記ミラーから延びる前記光路が、ほぼ垂直方向を向いている、請求項13に記載の方法。
【請求項19】
前記第2のミラーが整合していて、そのため前記ミラーから延びる前記光路が、ほぼ水平方向を向いている、請求項13に記載の方法。
【請求項20】
前記経路方向付け装置の位置を検出するステップをさらに含む、請求項13に記載の方法。
【請求項21】
前記経路方向付け装置の位置を使用して前記画像取込装置に画像を取り込ませる時間を決定するステップをさらに含む、請求項20に記載の方法。
【請求項22】
光学コードに関連する情報を格納することができるサーバ・コンピュータと、
前記サーバ・コンピュータと通信するローカル・コンピュータと、
前記ローカル・コンピュータと通信するイメージ・スキャナ装置であって、
複数の画像を取り込むために動作することができる画像取込装置と、
それぞれが焦点面に光路を提供するように整合している複数のミラーと、
前記各光路からの画像を前記画像取込装置に向けるために動作することができる経路方向付け装置と、
前記画像取込装置に前記各光路からの画像を取り込ませ、前記取り込んだ画像の1つ以上を使用して光学コードを復号させることができる処理回路と
を備えるイメージ・スキャナ装置とを備える光学コードを走査するための多重経路イメージ・スキャナ・システム。
【請求項23】
前記経路方向付け装置が多角形である、請求項22に記載のシステム。
【請求項24】
前記経路方向付け装置が少なくとも1つの反射面を有する、請求項23に記載のシステム。
【請求項25】
前記経路方向付け装置が回転する、請求項24に記載のシステム。
【請求項26】
前記処理回路が、前記経路方向付け装置に対する位置情報を検出し、前記位置情報を使用して前記画像取込装置に前記画像を取り込ませる時間を決定することができる、請求項22に記載のシステム。
【請求項27】
前記処理回路が、1つまたは複数の前記取り込んだ画像を格納することができる、請求項22に記載のシステム。
【請求項28】
前記光学コードがバーコードを含む、請求項22に記載のシステム。
【請求項29】
前記光学コードが英数字のテキストを含む、請求項22に記載のシステム。
【請求項30】
前記複数のミラーのうちの少なくとも1つが整合していて、そのため前記ミラーから延びる前記光路が、ほぼ垂直方向を向いている、請求項22に記載のシステム。
【請求項31】
前記複数のミラーのうちの少なくとも1つが整合していて、そのため前記ミラーから延びる前記光路が、ほぼ水平方向を向いている、請求項22に記載のシステム。
【請求項1】
複数の画像を取り込むために動作することができる画像取込装置と、
それぞれが、焦点面に画像光路を提供するように整合している複数のミラーと、
画像を各画像光路から前記画像取込装置に向けるために動作することができる経路方向付け装置と、
前記画像取込装置に前記各画像光路からの前記画像を取り込ませ、1つまたは複数の取り込んだ画像を使用して前記光学コードを復号させることができる処理回路とを備える光学コードを走査するための多重経路イメージ・スキャナ装置。
【請求項2】
前記経路方向付け装置が多角形である、請求項1に記載の装置。
【請求項3】
前記経路方向付け装置が少なくとも1つの反射面を有する、請求項2に記載の装置。
【請求項4】
前記経路方向付け装置が回転する、請求項3に記載の装置。
【請求項5】
前記処理回路が、前記経路方向付け装置に対する位置情報を検出し、前記画像取込装置に前記画像を取り込ませる時間を決定するために前記位置情報を使用することができる、請求項1に記載の装置。
【請求項6】
前記処理回路が、校正画像を使用して前記経路方向付け装置の位置を決定する、請求項5に記載の装置。
【請求項7】
前記処理回路が、1つまたは複数の前記取り込んだ画像を格納することができる、請求項1に記載の装置。
【請求項8】
前記光学コードがバーコードを含む、請求項1に記載の装置。
【請求項9】
前記光学コードが英数字のテキストを含む、請求項1に記載の装置。
【請求項10】
前記複数のミラーのうちの少なくとも1つが整合していて、そのため前記ミラーから延びる前記光路が、ほぼ垂直方向を向いている、請求項1に記載の装置。
【請求項11】
前記複数のミラーのうちの少なくとも1つが整合していて、そのため前記ミラーから延びる前記光路が、ほぼ水平方向を向いている、請求項1に記載の装置。
【請求項12】
前記処理回路が、他の処理回路により前記光学コードを復号させる、請求項1に記載の装置。
【請求項13】
第1のミラーから画像取込装置に第1の画像を反射するために経路方向付け装置を第1の位置に回転させるステップと、
前記画像取込装置に前記第1の画像を取り込ませるステップと、
第2のミラーから画像取込装置に第2の画像を反射するために前記経路方向付け装置を第2の位置に回転させるステップと、
前記画像取込装置に前記第2の画像を取り込ませるステップと、
前記第1および第2の画像の一方または両方を処理することにより光学コードを復号するステップとを含む光学コード走査方法。
方法。
【請求項14】
前記経路方向付け装置が多角形である、請求項13に記載の方法。
【請求項15】
前記経路方向付け装置が少なくとも1つの反射面を有する、請求項14に記載の方法。
【請求項16】
前記光学コードがバーコードを含む、請求項13に記載の方法。
【請求項17】
前記光学コードが英数字のテキストを含む、請求項13に記載の方法。
【請求項18】
前記第1のミラーが整合していて、そのため前記ミラーから延びる前記光路が、ほぼ垂直方向を向いている、請求項13に記載の方法。
【請求項19】
前記第2のミラーが整合していて、そのため前記ミラーから延びる前記光路が、ほぼ水平方向を向いている、請求項13に記載の方法。
【請求項20】
前記経路方向付け装置の位置を検出するステップをさらに含む、請求項13に記載の方法。
【請求項21】
前記経路方向付け装置の位置を使用して前記画像取込装置に画像を取り込ませる時間を決定するステップをさらに含む、請求項20に記載の方法。
【請求項22】
光学コードに関連する情報を格納することができるサーバ・コンピュータと、
前記サーバ・コンピュータと通信するローカル・コンピュータと、
前記ローカル・コンピュータと通信するイメージ・スキャナ装置であって、
複数の画像を取り込むために動作することができる画像取込装置と、
それぞれが焦点面に光路を提供するように整合している複数のミラーと、
前記各光路からの画像を前記画像取込装置に向けるために動作することができる経路方向付け装置と、
前記画像取込装置に前記各光路からの画像を取り込ませ、前記取り込んだ画像の1つ以上を使用して光学コードを復号させることができる処理回路と
を備えるイメージ・スキャナ装置とを備える光学コードを走査するための多重経路イメージ・スキャナ・システム。
【請求項23】
前記経路方向付け装置が多角形である、請求項22に記載のシステム。
【請求項24】
前記経路方向付け装置が少なくとも1つの反射面を有する、請求項23に記載のシステム。
【請求項25】
前記経路方向付け装置が回転する、請求項24に記載のシステム。
【請求項26】
前記処理回路が、前記経路方向付け装置に対する位置情報を検出し、前記位置情報を使用して前記画像取込装置に前記画像を取り込ませる時間を決定することができる、請求項22に記載のシステム。
【請求項27】
前記処理回路が、1つまたは複数の前記取り込んだ画像を格納することができる、請求項22に記載のシステム。
【請求項28】
前記光学コードがバーコードを含む、請求項22に記載のシステム。
【請求項29】
前記光学コードが英数字のテキストを含む、請求項22に記載のシステム。
【請求項30】
前記複数のミラーのうちの少なくとも1つが整合していて、そのため前記ミラーから延びる前記光路が、ほぼ垂直方向を向いている、請求項22に記載のシステム。
【請求項31】
前記複数のミラーのうちの少なくとも1つが整合していて、そのため前記ミラーから延びる前記光路が、ほぼ水平方向を向いている、請求項22に記載のシステム。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2008−146653(P2008−146653A)
【公開日】平成20年6月26日(2008.6.26)
【国際特許分類】
【出願番号】特願2007−317904(P2007−317904)
【出願日】平成19年12月10日(2007.12.10)
【出願人】(391007161)エヌ・シー・アール・コーポレイション (85)
【氏名又は名称原語表記】NCR CORPORATION
【Fターム(参考)】
【公開日】平成20年6月26日(2008.6.26)
【国際特許分類】
【出願日】平成19年12月10日(2007.12.10)
【出願人】(391007161)エヌ・シー・アール・コーポレイション (85)
【氏名又は名称原語表記】NCR CORPORATION
【Fターム(参考)】
[ Back to top ]