
多関節ロボットのツールセンターポイント設定方法、及びツールセンターポイント設定用の治具の取付構造

【課題】多関節ロボットの手首軸フランジに設定されたフランジ座標系に基づいて、手首軸フランジに装着されるツールでのツール座標系を設定するツールセンターポイント(TCP)設定作業の後、速やかにツールによる作業を行うことができ、ツールの手首軸フランジへの装着位置にずれを生じさせない。
【解決手段】多関節ロボット1の手首軸フランジ2に装着されたツール5(吸着パッド6)にTCP設定を行うための治具7を取り付けてTCP設定作業を行い、作業終了後、治具7をツール5から取り外す。ツール5をロボット1の手首軸フランジ2から取り外すことなく、TCP設定作業を行うので、作業終了後、速やかにツール5による作業を行うことができる。また、ツール5が手首軸フランジ2に固定されたままなので、TCP設定作業を行っても、ツール5の手首軸フランジ2への装着位置にずれが生じない。
【解決手段】多関節ロボット1の手首軸フランジ2に装着されたツール5(吸着パッド6)にTCP設定を行うための治具7を取り付けてTCP設定作業を行い、作業終了後、治具7をツール5から取り外す。ツール5をロボット1の手首軸フランジ2から取り外すことなく、TCP設定作業を行うので、作業終了後、速やかにツール5による作業を行うことができる。また、ツール5が手首軸フランジ2に固定されたままなので、TCP設定作業を行っても、ツール5の手首軸フランジ2への装着位置にずれが生じない。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、多関節ロボットの手首軸フランジに設定されたフランジ座標系に基づいて、手首軸フランジに装着されるツールでのツール座標系を設定する多関節ロボットのツールセンターポイント設定方法、及びツールセンターポイント設定用の治具の取付構造に関する。
【背景技術】
【0002】
産業用ロボット等に用いられる多関節ロボット(例えば6軸多関節ロボット)は、一般に、ロボットのアーム先端の手首軸フランジに、作業に応じた様々なツール(例えば吸着パッド、開閉ハンド等)が取り付けられるようになっており、様々な作業に対応可能な汎用性を備えている。どのようなツールが取り付けられるかは、ロボットの出荷時には不明であるため、出荷時には、ロボットの手首軸先端の動作を規定すべく、手首軸フランジに座標系(フランジ座標系:XFLANGE、YFLANGE、ZFLANGE)が設定されている。
【0003】
しかし、手首軸フランジにツールを取り付けた後は、手首軸フランジのフランジ座標系でツールを動かすことは不便であり、ツールを基準とした新たな座標系(ツール座標系:XTOOL、YTOOL、ZTOOL)を設定することが行われる。この設定は、従来、手首軸フランジに、ツールの代わりに専用の治具を取り付け、多関節ロボットを作動させることで、治具の先端を多関節ロボットが据え付けられた床面に設置された基準治具の基準点に移動させることで行っていた。このようにして、多関節ロボットの手首軸フランジに設定されたフランジ座標系を元に、手首軸フランジに取り付けられるツールでのツール座標系を設定する作業を、ツールセンターポイント(以下TCP(Tool Center Point)とも言う)設定作業と言う。
【0004】
なお、産業用ロボットのキャリブレーションに関する発明として特許文献1〜3に記載されたものが知られているが、これらは、多関節ロボットの手首軸フランジに設定されたフランジ座標系に基づいて手首軸フランジに装着されるツールでのツール座標系を設定するものではない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平8−155866号公報
【特許文献2】特開2003−181782号公報
【特許文献3】特開2011−67889号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、従来のTCP設定作業は、多関節ロボットの手首軸フランジに装着されたツール(吸着パッド、開閉ハンド等)を一旦手首軸フランジから取り外し、代わりにTCP設定用の専用治具を手首軸フランジに取り付けて行っていた。
【0007】
このため、TCP設定作業の終了後、ツールによる作業を行うには、専用治具を手首軸フランジから取り外し、その手首軸フランジにツール(吸着パッド、開閉ハンド等)を取り付ける必要がある。かかる交換(段取り替え)は、手間及び時間が掛かり、効率が悪い。また、ツールを手首軸フランジに着脱する際に装着位置にずれが僅かでも生じると、ツールによる作業の精度が悪化してしまう。
【0008】
以上の事情を考慮して創案された本発明の目的は、TCP設定作業後、速やかにツールによる作業を行うことができ、ツールの手首軸フランジへの装着位置にずれが生じない多関節ロボットのTCP設定方法、及びTCP設定用の治具の取付構造を提供することにある。
【課題を解決するための手段】
【0009】
上記目的を達成するために創案された本発明によれば、多関節ロボットの手首軸フランジに設定されたフランジ座標系に基づいて、手首軸フランジに装着されるツールでのツール座標系を設定するTCP設定方法であって、手首軸フランジにツールを装着し、ツールに治具を取り付け、多関節ロボットを作動させることで、治具を多関節ロボットが据え付けられた床面に設置された基準治具の基準点に移動させて、フランジ座標系に基づいてツール座標系を設定するTCP設定作業を行い、治具をツールから取り外すようにしたことを特徴とする多関節ロボットのTCP設定方法が提供される。
【0010】
また、本発明によれば、多関節ロボットの手首軸フランジに設定されたフランジ座標系に基づいて、手首軸フランジに装着されるツールでのツール座標系を設定する際に用いる治具の取付構造であって、手首軸フランジに装着されたツールを手首軸フランジから取り外すことなく、TCP設定作業を行うための治具がツールに対して着脱可能であることを特徴とする多関節ロボットにおけるTCP設定用の治具の取付構造が提供される。
【発明の効果】
【0011】
本発明によれば、多関節ロボットの手首軸フランジからツールを取り外すことなく、そのツールにTCP設定を行うための治具を取り付けてTCP設定作業を行い、作業終了後、治具をツールから取り外すようにしている。このように、ツールを手首軸フランジから取り外すことなく、TCP設定作業を行うので、作業終了後、速やかに多関節ロボットを作動させてツールによる作業を行うことができる。また、ツールが手首軸フランジに固定されたままなので、TCP設定作業を行っても、ツールの手首軸フランジへの装着位置にずれが生じ難い。
【図面の簡単な説明】
【0012】
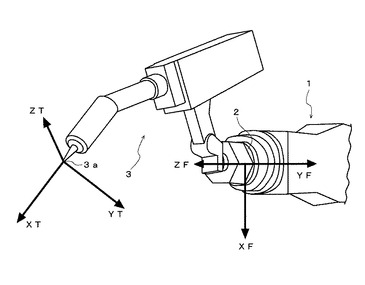
【図1】本発明が適用される多関節ロボット、フランジ座標系及びツール座標系を示す斜視図である。
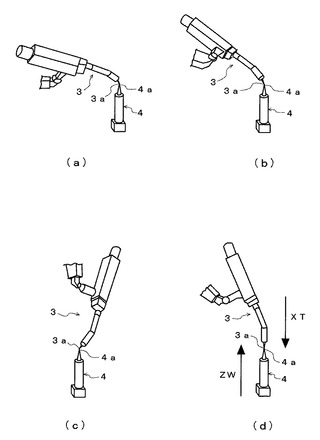
【図2】本発明の前提となる多関節ロボットのTCP設定作業の一部を示す斜視図であり、(a)は第1工程、(b)は第2工程、(c)は第3工程、(d)は第4工程を示す。
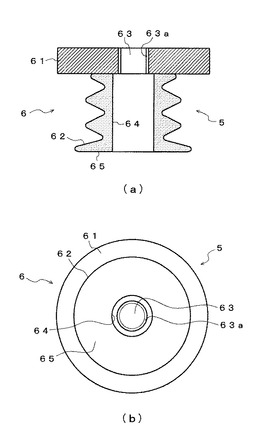
【図3】多関節ロボットの手首軸フランジに装着されるツールとしての吸着パッドの説明図であり、(a)は吸着パッドの側断面図、(b)は吸着パッドの下面図である。
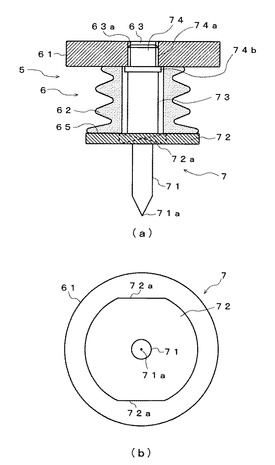
【図4】本発明の第1実施形態に係るTCP設定用の治具を吸着パッドに装着した様子を示す説明図であり、(a)は吸着パッド及び治具の側断面図、(b)は(a)の下面図である。
【図5】多関節ロボットの手首軸フランジに装着されるツールとしての開閉ハンドの説明図であり、(a)は開閉ハンドの平面図、(b)は開閉ハンドの正面図、(c)は開閉ハンドの側面図である。
【図6】本発明の第2実施形態に係るTCP設定用の治具(開閉ハンドに把持・解放される治具)を示す説明図であり、(a)は治具の平面図、(b)は(a)のb−b線断面図、(c)は治具の側面図である。
【発明を実施するための形態】
【0013】
以下に添付図面を参照しながら、本発明の好適な実施形態について詳細に説明する。かかる実施形態に示す寸法、材料、その他具体的な数値等は、発明の理解を容易にするための例示に過ぎず、特に断る場合を除き、本発明を限定するものではない。なお、本明細書及び図面において、実質的に同一の機能、構成を有する要素については、同一の符号を付することにより重複説明を省略し、また本発明に直接関係のない要素は図示を省略する。
【0014】
(多関節ロボット)
本発明の実施形態が適用される多関節ロボットについて説明する。図1に示すように、この多関節ロボット(例えば6軸多関節ロボット)1は、産業用ロボット等に用いられるものであり、ロボット1のアーム先端の手首軸フランジ2に、作業に応じた様々なツール(例えば吸着パッド、開閉ハンド等)が取り付けられるようになっていて、様々な作業に対応可能な汎用性を備えている。どのようなツールが取り付けられるかは、ロボット1の出荷時には不明であるため、出荷時には、ロボット1の手首軸先端の動作を規定すべく、手首軸フランジ2に座標系(フランジ座標系:XF、YF、ZF)が設定されている。
【0015】
手首軸フランジ2にツールを取り付けた後は、手首軸フランジ2のフランジ座標系でツールを動かすことは不便であるため、ツールを基準とした新たな座標系(ツール座標系: XT、YT、ZT)を設定することが行われる。すなわち、多関節ロボット1の手首軸フランジ2に設定されたフランジ座標系を元に、手首軸フランジ2に取り付けられるツールでのツール座標系を設定する作業を行う。この作業をツールセンターポイント設定作業(TCP設定作業)と言う。以下、TCP設定作業について簡単に説明する。
【0016】
(TCP設定作業)
本発明の前提となるTCP設定作業の一部を簡単に説明する。作業を始める前に、図1に示すように、多関節ロボット1の手首軸フランジ2にTCP設定用の専用治具3を取り付け、図2(a)〜図2(d)に示すように、多関節ロボット1が据え付けられた床面に、専用治具3が届く範囲に位置して、基準治具4を設置(載置)する。基準治具4は、例えば頂部に尖った基準点4aを備えた柱体が用いられる。
【0017】
多関節ロボット1を作動させて、4つ以上の姿勢で専用治具3の先端3aを基準治具4の基準点4aに移動する。ここでは4つの姿勢を例に説明する。多関節ロボット1を作動させて、図2(a)に示すように、専用治具3の先端3aを基準治具4の基準点4aに移動する。図2(b)に示すように、図2(a)とは異なった方向から、専用治具3の先端3aを基準治具4の基準点4aに移動する。図2(c)に示すように、図2(a)及び図2(b)とは異なった方向から、専用治具3の先端3aを基準治具4の基準点4aに移動する。最後に図2(d)に示すように、専用治具3の先端3aを基準点4aの鉛直上方から下降させて基準点4aに移動する。図2(a)〜図2(d)にかけての多関節ロボット1の作動データをセーブする。これにより、ツール座標系の原点が決定できる。
【0018】
ところで、このように多関節ロボット1の手首軸フランジ2にツールの代わりにTCP設定用の専用治具3を取り付けると、TCP設定作業終了後にツールによる作業を行うためには、専用治具3を手首軸フランジ2から取り外して手首軸フランジ2にツールを取り付けなければならず、段取り替えに手間及び時間が掛かり、効率が悪い。また、ツールを手首軸フランジ2に着脱する際にずれが生じると、ツールによる作業精度が低下してしまうという問題が生じる。
【0019】
そこで、本発明においては、図1、図2を用いて既述したように多関節ロボット1のTCP設定作業を行う際、多関節ロボット1の手首軸フランジ2にTCP設定用の専用治具3を取り付けるのではなく、手首軸フランジ2に実際に作業に用いるツール(吸着パッド、開閉ハンド等)を装着し、そのツールにTCP設定用の治具を着脱可能に取り付けるようにしている。以下、この点について詳述する。
【0020】
(第1実施形態)
本発明の第1実施形態として、ツール5に図3に示す吸着パッド6を用い、その吸着パッド6に図4に示すTCP設定用の治具7を着脱可能に取り付けたものを説明する。
【0021】
(ツールとしての吸着パッド)
図1に示す多関節ロボット(6軸多関節ロボット)1の手首軸フランジ2に、ツール5として装着される吸着パッド6を図3に示す。図3(a)は吸着パッド6の側断面図、図3(b)は吸着パッド6の下面図である。
【0022】
この吸着パッド6は、図1に示す多関節ロボット1の手首軸フランジ2から既述のTCP設定用の専用治具3を取り外し、空いた手首軸フランジ2に装着される。吸着パッド6は、手首軸フランジ2に装着される基台61と、基台61に設けられたパッド本体62とを有する。基台61は、金属製の板体からなり、基台61には、多関節ロボット1の手首軸フランジ2に設けられたバキューム装置(図示せず)と連通するバキューム通路63が貫通形成されている。パッド本体62は、ゴム等の可撓性を有する材質からベローズ状又は蛇腹状に形成されており、パッド本体62内には、基台61のバキューム通路63と連通する内部通路64が形成されている。
【0023】
この吸着パッド6によれば、手首軸フランジ2に設けられたバキューム装置を作動させて空気をバキューム通路63から吸い込むことでワーク(図示せず)をパッド本体62のワーク当接部65に吸着保持でき、バキューム装置を停止する或いは空気をバキューム通路63から吹き出すことでワークをパッド本体62から解放できる。よって、吸着パッド6が取り付けられた図1に示す多関節ロボット1を作動させることで、パッド本体62に吸着保持したワークを所望の姿勢で所望の場所に移動でき、ワークを所望の姿勢・場所でパッド本体62から解放できる。
【0024】
(TCP設定用の治具)
吸着パッド6に取り付けられるTCP設定用の治具7を図4に示す。図4(a)は吸着パッド6に装着された治具7の側断面図、図4(b)はその治具7の下面図である。
【0025】
治具7は、先端が尖った基準ピン71と、吸着パッド6のワーク当接部65を覆うように形成されたフランジ72と、フランジ72から吸着パッド6の基台61に向けて延設されたロッド73と、吸着パッド6の基台61に着脱可能に取り付けられる取付部74とを有し、これら基準ピン71、フランジ72、ロッド73及び取付部74が、金属等で一体成形されている。
【0026】
基準ピン71の先端は、図2に示すTCP設定作業において、多関節ロボット1を作動させることで、床面に載置された基準治具4の基準点4aに合わせられる。フランジ72は、パッド本体62のワーク当接部65を覆うことで、ワーク当接部65が傷付かないように防護する。このフランジ72には、後述するように取付部74の雄ネジ部74aをバキューム通路63の雌ネジ部63aにネジ込むため、スパナが係合される係合部72aが平行に切り欠かれている。
【0027】
治具7の取付部74は、ロッド73の先端に設けられた雄ネジ部74aと、ロッド73に設けられたストッパフランジ74bとを有する。雄ネジ部74aは、バキューム通路63の内周面に形成された雌ネジ部63aに螺合される。ストッパフランジ74bは、雄ネジ部74aを雌ネジ部63aにネジ込んだ際にバキューム通路63の開口縁に押し付けられ、雄ネジ部74aの螺合深さを規制して螺合位置を定める。なお、バキューム通路63は、パッド本体62の内部通路64の中心(パッドセンター)に配置されており、治具7が吸着パッド6のパッドセンターに取り付けられるようになっている。
【0028】
(TCP設定方法)
TCPの設定とは、既述のように、図1に示す多関節ロボット1の手首軸フランジ2に設定されたフランジ座標系(XF、YF、ZF)を元に、手首軸フランジ2に取り付けられるツール5(吸着パッド6)でのツール座標系(XT、YT、ZT)を設定することをいう。
【0029】
本実施形態に係るTCP設定方法においては、先ず、手首軸フランジ2にツール5(吸着パッド6)をボルトナット等で装着し、吸着パッド6のバキューム通路63に形成された雌ネジ部63aに、TCP設定用の治具7の雄ネジ部74aを螺合させ、吸着パッド6に治具7を取り付ける。ここで、雄ネジ部74aの雌ネジ部63aへの螺合深さを、治具7のストッパフランジ74bがバキューム通路63の開口縁に押し付けられるまでとすることで、治具7の取付位置が精度よく定められる。
【0030】
次に、多関節ロボット1を作動させ、治具7の基準ピン71の先端71aを図2に示すような基準治具4の基準点4aに移動させ、図2を用いて既述したようにTCP設定作業を行う。その後、雄ネジ部74aを緩めて雌ネジ部63aから外すことで、治具7を吸着パッド6から取り外し、治具7を取り外した吸着パッド6でワークの吸着作業を行う。
【0031】
(作用・効果)
本実施形態によれば、多関節ロボット1の手首軸フランジ2からツール5(吸着パッド6)を取り外すことなく、そのツール5にTCP設定を行うための治具7を取り付けてTCP設定作業を行い、作業終了後、治具7をツール5から取り外すようにしている。このように、ツール5を手首軸フランジ2から取り外すことなく、TCP設定作業を行うので、作業終了後、速やかに多関節ロボット1を作動させてツール5による作業(吸着パッド6によるワークの吸着作業)を行うことができる。また、ツール5が手首軸フランジ2に固定されたままなので、TCP設定作業を行っても、ツール5の手首軸フランジ2への装着位置にずれが生じ難い。
【0032】
(第2実施形態)
次に、本発明の第2実施形態として、ツール5に図5に示す開閉ハンド8を用い、その開閉ハンド8に図6に示すTCP設定用の治具9を着脱可能に取り付けたものを説明する。
【0033】
(ツールとしての開閉ハンド)
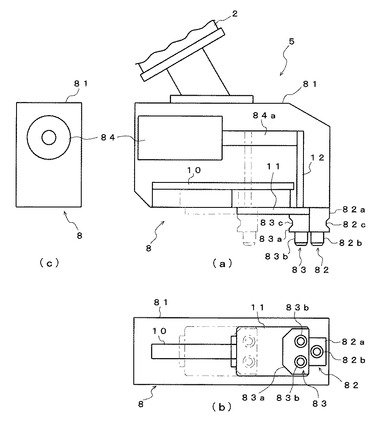
図1に示す多関節ロボット1の手首軸フランジ2に、ツール5として装着される開閉ハンド8を図5に示す。図5(a)は開閉ハンド8の平面図、図5(b)は開閉ハンド8の正面図、図5(c)は開閉ハンド8の側面図である。
【0034】
開閉ハンド8は、図1に示す多関節ロボット1の手首軸フランジ2から図1に表された既述のTCP設定用の専用治具3を取り外し、空いた手首軸フランジ2に装着される。開閉ハンド8は、手首軸フランジ2に装着されるケーシング81と、ケーシング81に固定された固定爪82と、固定爪82に対して近接離間移動可能な移動爪83と、移動爪83を移動させるアクチュエータとしてのシリンダ84とを備えている。
【0035】
固定爪82は、ケーシング81に固定された根本部82aと、根本部82aに設けられたピン部82bとを有する。本実施例では、根本部82aにはピン部82bが1本設けられているが2本以上設けてもよい。根本部82aには、後述するTCP設定用の治具9を把持するための凹部82cが形成されている。
【0036】
一方、移動爪83は、ケーシング81内に設けられたガイド(リニアガイド)10に係合してガイド10に沿ってスライド移動可能なスライドブロック11に設けられており、スライドブロック11に固定された根本部83aと、根本部83aに設けられたピン部83bとを有する。本実施形態では、根本部83aにはピン部83bが2本設けられているが1本でもよく3本以上でも構わない。根本部83aには、後述するTCP設定用の治具9を把持するための凹部83cが形成されている。
【0037】
スライドブロック11とシリンダ84の伸縮ロッド84aとは連結金具12で連結されており、シリンダ84の伸縮ロッド84aを伸縮させることでスライドブロック11が移動し、移動爪83が固定爪82に対して離間するようになっている。
【0038】
(TCP設定用の治具)
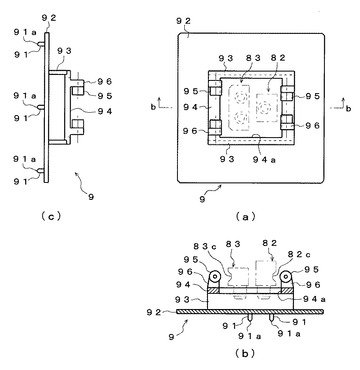
このような開閉ハンド8に把持されるTCP設定用の治具9を図6に示す。図6(a)はこの治具9の平面図、図6(b)は図6(a)のb−b線断面図、図6(c)は治具の側面図である。
【0039】
治具9は、下面に尖った先端91aをもつ基準ピン9が取り付けられた略方形の板体92と、板体92の上面に一対の取付板93を介して取り付けられた枠板94と、枠板94の上面に取り付けられた被把持部(取付部)95とを備えている。被把持部95は、円柱状に形成されており、枠板の上面に金具96によって取り付けられている。
【0040】
枠板94の窓部94aには、開閉ハンド8の固定爪82及び移動爪83が挿入され、その状態で移動爪83を固定爪82に対して離間させることで、移動爪83の凹部83c及び固定爪82の凹部82cが治具9の被把持部95に係合し、治具9が開閉ハンド8に把持されるようになっている。治具9を開閉ハンド8から解放するときには、移動爪83を固定爪82に近付け、移動爪83の凹部83c及び固定爪82の凹部82cを治具9の被把持部95から離間させる。
【0041】
(TCP設定方法)
本実施形態に係るTCP設定方法においては、先ず、多関節ロボット1の手首軸フランジ2にツール5(開閉ハンド8)をボルトナット等で装着し、開閉ハンド8にTCP設定用の治具9を把持させる。このとき、移動爪83の凹部83c及び固定爪82の凹部82cが治具9の被把持部95に係合することで、治具9の把持位置が精度よく定められる。
【0042】
次に、多関節ロボット1を作動させることで、治具9の基準ピン91の先端91aを図2に示すような基準治具4の基準点4aに移動させ、図2を用いて既述したようにしてTCP設定作業を行う。その後、治具9を開閉ハンド8から取り外し、治具9を取り外した開閉ハンド8でワークの把持作業を行う。
【0043】
(作用・効果)
本実施形態においても、前実施形態と同様に、多関節ロボット1の手首軸フランジ2からツール5(開閉ハンド8)を取り外すことなく、そのツール5にTCP設定を行うための治具9を取り付けてTCP設定作業を行い、作業終了後、治具9をツール5から取り外すようにしている。このため、TCP設定作業の終了後、速やかにツール5による作業(開閉ハンド8によるワークの把持作業)を行うことができる。また、ツール5が手首軸フランジ2に固定されたままなので、TCP設定作業を行っても、ツール5の手首軸フランジ2への装着位置にずれが生じ難い。
【0044】
以上、添付図面を参照しつつ本発明の好適な実施形態について説明したが、本発明は上述した各実施形態に限定されないことは勿論であり、特許請求の範囲に記載された範疇における各種の変更例又は修正例についても、本発明の技術的範囲に属することは言うまでもない。
【産業上の利用可能性】
【0045】
本発明は、多関節ロボットの手首軸フランジに設定されたフランジ座標系に基づいて、手首軸フランジに装着されるツールでのツール座標系を設定する多関節ロボットのツールセンターポイント設定方法、及びツールセンターポイント設定用の治具の取付構造に利用できる。
【符号の説明】
【0046】
1 多関節ロボット(6軸多関節ロボット)
2 手首軸フランジ
4 基準治具
4a 基準点
5 ツール
6 吸着パッド
63a ネジ部(雌ネジ部)
7 治具
74 取付部
8 開閉ハンド
9 治具
95 取付部(被把持部)
XF フランジ座標系
YF フランジ座標系
ZF フランジ座標系
XT ツール座標系
YT ツール座標系
ZT ツール座標系
【技術分野】
【0001】
本発明は、多関節ロボットの手首軸フランジに設定されたフランジ座標系に基づいて、手首軸フランジに装着されるツールでのツール座標系を設定する多関節ロボットのツールセンターポイント設定方法、及びツールセンターポイント設定用の治具の取付構造に関する。
【背景技術】
【0002】
産業用ロボット等に用いられる多関節ロボット(例えば6軸多関節ロボット)は、一般に、ロボットのアーム先端の手首軸フランジに、作業に応じた様々なツール(例えば吸着パッド、開閉ハンド等)が取り付けられるようになっており、様々な作業に対応可能な汎用性を備えている。どのようなツールが取り付けられるかは、ロボットの出荷時には不明であるため、出荷時には、ロボットの手首軸先端の動作を規定すべく、手首軸フランジに座標系(フランジ座標系:XFLANGE、YFLANGE、ZFLANGE)が設定されている。
【0003】
しかし、手首軸フランジにツールを取り付けた後は、手首軸フランジのフランジ座標系でツールを動かすことは不便であり、ツールを基準とした新たな座標系(ツール座標系:XTOOL、YTOOL、ZTOOL)を設定することが行われる。この設定は、従来、手首軸フランジに、ツールの代わりに専用の治具を取り付け、多関節ロボットを作動させることで、治具の先端を多関節ロボットが据え付けられた床面に設置された基準治具の基準点に移動させることで行っていた。このようにして、多関節ロボットの手首軸フランジに設定されたフランジ座標系を元に、手首軸フランジに取り付けられるツールでのツール座標系を設定する作業を、ツールセンターポイント(以下TCP(Tool Center Point)とも言う)設定作業と言う。
【0004】
なお、産業用ロボットのキャリブレーションに関する発明として特許文献1〜3に記載されたものが知られているが、これらは、多関節ロボットの手首軸フランジに設定されたフランジ座標系に基づいて手首軸フランジに装着されるツールでのツール座標系を設定するものではない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平8−155866号公報
【特許文献2】特開2003−181782号公報
【特許文献3】特開2011−67889号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、従来のTCP設定作業は、多関節ロボットの手首軸フランジに装着されたツール(吸着パッド、開閉ハンド等)を一旦手首軸フランジから取り外し、代わりにTCP設定用の専用治具を手首軸フランジに取り付けて行っていた。
【0007】
このため、TCP設定作業の終了後、ツールによる作業を行うには、専用治具を手首軸フランジから取り外し、その手首軸フランジにツール(吸着パッド、開閉ハンド等)を取り付ける必要がある。かかる交換(段取り替え)は、手間及び時間が掛かり、効率が悪い。また、ツールを手首軸フランジに着脱する際に装着位置にずれが僅かでも生じると、ツールによる作業の精度が悪化してしまう。
【0008】
以上の事情を考慮して創案された本発明の目的は、TCP設定作業後、速やかにツールによる作業を行うことができ、ツールの手首軸フランジへの装着位置にずれが生じない多関節ロボットのTCP設定方法、及びTCP設定用の治具の取付構造を提供することにある。
【課題を解決するための手段】
【0009】
上記目的を達成するために創案された本発明によれば、多関節ロボットの手首軸フランジに設定されたフランジ座標系に基づいて、手首軸フランジに装着されるツールでのツール座標系を設定するTCP設定方法であって、手首軸フランジにツールを装着し、ツールに治具を取り付け、多関節ロボットを作動させることで、治具を多関節ロボットが据え付けられた床面に設置された基準治具の基準点に移動させて、フランジ座標系に基づいてツール座標系を設定するTCP設定作業を行い、治具をツールから取り外すようにしたことを特徴とする多関節ロボットのTCP設定方法が提供される。
【0010】
また、本発明によれば、多関節ロボットの手首軸フランジに設定されたフランジ座標系に基づいて、手首軸フランジに装着されるツールでのツール座標系を設定する際に用いる治具の取付構造であって、手首軸フランジに装着されたツールを手首軸フランジから取り外すことなく、TCP設定作業を行うための治具がツールに対して着脱可能であることを特徴とする多関節ロボットにおけるTCP設定用の治具の取付構造が提供される。
【発明の効果】
【0011】
本発明によれば、多関節ロボットの手首軸フランジからツールを取り外すことなく、そのツールにTCP設定を行うための治具を取り付けてTCP設定作業を行い、作業終了後、治具をツールから取り外すようにしている。このように、ツールを手首軸フランジから取り外すことなく、TCP設定作業を行うので、作業終了後、速やかに多関節ロボットを作動させてツールによる作業を行うことができる。また、ツールが手首軸フランジに固定されたままなので、TCP設定作業を行っても、ツールの手首軸フランジへの装着位置にずれが生じ難い。
【図面の簡単な説明】
【0012】
【図1】本発明が適用される多関節ロボット、フランジ座標系及びツール座標系を示す斜視図である。
【図2】本発明の前提となる多関節ロボットのTCP設定作業の一部を示す斜視図であり、(a)は第1工程、(b)は第2工程、(c)は第3工程、(d)は第4工程を示す。
【図3】多関節ロボットの手首軸フランジに装着されるツールとしての吸着パッドの説明図であり、(a)は吸着パッドの側断面図、(b)は吸着パッドの下面図である。
【図4】本発明の第1実施形態に係るTCP設定用の治具を吸着パッドに装着した様子を示す説明図であり、(a)は吸着パッド及び治具の側断面図、(b)は(a)の下面図である。
【図5】多関節ロボットの手首軸フランジに装着されるツールとしての開閉ハンドの説明図であり、(a)は開閉ハンドの平面図、(b)は開閉ハンドの正面図、(c)は開閉ハンドの側面図である。
【図6】本発明の第2実施形態に係るTCP設定用の治具(開閉ハンドに把持・解放される治具)を示す説明図であり、(a)は治具の平面図、(b)は(a)のb−b線断面図、(c)は治具の側面図である。
【発明を実施するための形態】
【0013】
以下に添付図面を参照しながら、本発明の好適な実施形態について詳細に説明する。かかる実施形態に示す寸法、材料、その他具体的な数値等は、発明の理解を容易にするための例示に過ぎず、特に断る場合を除き、本発明を限定するものではない。なお、本明細書及び図面において、実質的に同一の機能、構成を有する要素については、同一の符号を付することにより重複説明を省略し、また本発明に直接関係のない要素は図示を省略する。
【0014】
(多関節ロボット)
本発明の実施形態が適用される多関節ロボットについて説明する。図1に示すように、この多関節ロボット(例えば6軸多関節ロボット)1は、産業用ロボット等に用いられるものであり、ロボット1のアーム先端の手首軸フランジ2に、作業に応じた様々なツール(例えば吸着パッド、開閉ハンド等)が取り付けられるようになっていて、様々な作業に対応可能な汎用性を備えている。どのようなツールが取り付けられるかは、ロボット1の出荷時には不明であるため、出荷時には、ロボット1の手首軸先端の動作を規定すべく、手首軸フランジ2に座標系(フランジ座標系:XF、YF、ZF)が設定されている。
【0015】
手首軸フランジ2にツールを取り付けた後は、手首軸フランジ2のフランジ座標系でツールを動かすことは不便であるため、ツールを基準とした新たな座標系(ツール座標系: XT、YT、ZT)を設定することが行われる。すなわち、多関節ロボット1の手首軸フランジ2に設定されたフランジ座標系を元に、手首軸フランジ2に取り付けられるツールでのツール座標系を設定する作業を行う。この作業をツールセンターポイント設定作業(TCP設定作業)と言う。以下、TCP設定作業について簡単に説明する。
【0016】
(TCP設定作業)
本発明の前提となるTCP設定作業の一部を簡単に説明する。作業を始める前に、図1に示すように、多関節ロボット1の手首軸フランジ2にTCP設定用の専用治具3を取り付け、図2(a)〜図2(d)に示すように、多関節ロボット1が据え付けられた床面に、専用治具3が届く範囲に位置して、基準治具4を設置(載置)する。基準治具4は、例えば頂部に尖った基準点4aを備えた柱体が用いられる。
【0017】
多関節ロボット1を作動させて、4つ以上の姿勢で専用治具3の先端3aを基準治具4の基準点4aに移動する。ここでは4つの姿勢を例に説明する。多関節ロボット1を作動させて、図2(a)に示すように、専用治具3の先端3aを基準治具4の基準点4aに移動する。図2(b)に示すように、図2(a)とは異なった方向から、専用治具3の先端3aを基準治具4の基準点4aに移動する。図2(c)に示すように、図2(a)及び図2(b)とは異なった方向から、専用治具3の先端3aを基準治具4の基準点4aに移動する。最後に図2(d)に示すように、専用治具3の先端3aを基準点4aの鉛直上方から下降させて基準点4aに移動する。図2(a)〜図2(d)にかけての多関節ロボット1の作動データをセーブする。これにより、ツール座標系の原点が決定できる。
【0018】
ところで、このように多関節ロボット1の手首軸フランジ2にツールの代わりにTCP設定用の専用治具3を取り付けると、TCP設定作業終了後にツールによる作業を行うためには、専用治具3を手首軸フランジ2から取り外して手首軸フランジ2にツールを取り付けなければならず、段取り替えに手間及び時間が掛かり、効率が悪い。また、ツールを手首軸フランジ2に着脱する際にずれが生じると、ツールによる作業精度が低下してしまうという問題が生じる。
【0019】
そこで、本発明においては、図1、図2を用いて既述したように多関節ロボット1のTCP設定作業を行う際、多関節ロボット1の手首軸フランジ2にTCP設定用の専用治具3を取り付けるのではなく、手首軸フランジ2に実際に作業に用いるツール(吸着パッド、開閉ハンド等)を装着し、そのツールにTCP設定用の治具を着脱可能に取り付けるようにしている。以下、この点について詳述する。
【0020】
(第1実施形態)
本発明の第1実施形態として、ツール5に図3に示す吸着パッド6を用い、その吸着パッド6に図4に示すTCP設定用の治具7を着脱可能に取り付けたものを説明する。
【0021】
(ツールとしての吸着パッド)
図1に示す多関節ロボット(6軸多関節ロボット)1の手首軸フランジ2に、ツール5として装着される吸着パッド6を図3に示す。図3(a)は吸着パッド6の側断面図、図3(b)は吸着パッド6の下面図である。
【0022】
この吸着パッド6は、図1に示す多関節ロボット1の手首軸フランジ2から既述のTCP設定用の専用治具3を取り外し、空いた手首軸フランジ2に装着される。吸着パッド6は、手首軸フランジ2に装着される基台61と、基台61に設けられたパッド本体62とを有する。基台61は、金属製の板体からなり、基台61には、多関節ロボット1の手首軸フランジ2に設けられたバキューム装置(図示せず)と連通するバキューム通路63が貫通形成されている。パッド本体62は、ゴム等の可撓性を有する材質からベローズ状又は蛇腹状に形成されており、パッド本体62内には、基台61のバキューム通路63と連通する内部通路64が形成されている。
【0023】
この吸着パッド6によれば、手首軸フランジ2に設けられたバキューム装置を作動させて空気をバキューム通路63から吸い込むことでワーク(図示せず)をパッド本体62のワーク当接部65に吸着保持でき、バキューム装置を停止する或いは空気をバキューム通路63から吹き出すことでワークをパッド本体62から解放できる。よって、吸着パッド6が取り付けられた図1に示す多関節ロボット1を作動させることで、パッド本体62に吸着保持したワークを所望の姿勢で所望の場所に移動でき、ワークを所望の姿勢・場所でパッド本体62から解放できる。
【0024】
(TCP設定用の治具)
吸着パッド6に取り付けられるTCP設定用の治具7を図4に示す。図4(a)は吸着パッド6に装着された治具7の側断面図、図4(b)はその治具7の下面図である。
【0025】
治具7は、先端が尖った基準ピン71と、吸着パッド6のワーク当接部65を覆うように形成されたフランジ72と、フランジ72から吸着パッド6の基台61に向けて延設されたロッド73と、吸着パッド6の基台61に着脱可能に取り付けられる取付部74とを有し、これら基準ピン71、フランジ72、ロッド73及び取付部74が、金属等で一体成形されている。
【0026】
基準ピン71の先端は、図2に示すTCP設定作業において、多関節ロボット1を作動させることで、床面に載置された基準治具4の基準点4aに合わせられる。フランジ72は、パッド本体62のワーク当接部65を覆うことで、ワーク当接部65が傷付かないように防護する。このフランジ72には、後述するように取付部74の雄ネジ部74aをバキューム通路63の雌ネジ部63aにネジ込むため、スパナが係合される係合部72aが平行に切り欠かれている。
【0027】
治具7の取付部74は、ロッド73の先端に設けられた雄ネジ部74aと、ロッド73に設けられたストッパフランジ74bとを有する。雄ネジ部74aは、バキューム通路63の内周面に形成された雌ネジ部63aに螺合される。ストッパフランジ74bは、雄ネジ部74aを雌ネジ部63aにネジ込んだ際にバキューム通路63の開口縁に押し付けられ、雄ネジ部74aの螺合深さを規制して螺合位置を定める。なお、バキューム通路63は、パッド本体62の内部通路64の中心(パッドセンター)に配置されており、治具7が吸着パッド6のパッドセンターに取り付けられるようになっている。
【0028】
(TCP設定方法)
TCPの設定とは、既述のように、図1に示す多関節ロボット1の手首軸フランジ2に設定されたフランジ座標系(XF、YF、ZF)を元に、手首軸フランジ2に取り付けられるツール5(吸着パッド6)でのツール座標系(XT、YT、ZT)を設定することをいう。
【0029】
本実施形態に係るTCP設定方法においては、先ず、手首軸フランジ2にツール5(吸着パッド6)をボルトナット等で装着し、吸着パッド6のバキューム通路63に形成された雌ネジ部63aに、TCP設定用の治具7の雄ネジ部74aを螺合させ、吸着パッド6に治具7を取り付ける。ここで、雄ネジ部74aの雌ネジ部63aへの螺合深さを、治具7のストッパフランジ74bがバキューム通路63の開口縁に押し付けられるまでとすることで、治具7の取付位置が精度よく定められる。
【0030】
次に、多関節ロボット1を作動させ、治具7の基準ピン71の先端71aを図2に示すような基準治具4の基準点4aに移動させ、図2を用いて既述したようにTCP設定作業を行う。その後、雄ネジ部74aを緩めて雌ネジ部63aから外すことで、治具7を吸着パッド6から取り外し、治具7を取り外した吸着パッド6でワークの吸着作業を行う。
【0031】
(作用・効果)
本実施形態によれば、多関節ロボット1の手首軸フランジ2からツール5(吸着パッド6)を取り外すことなく、そのツール5にTCP設定を行うための治具7を取り付けてTCP設定作業を行い、作業終了後、治具7をツール5から取り外すようにしている。このように、ツール5を手首軸フランジ2から取り外すことなく、TCP設定作業を行うので、作業終了後、速やかに多関節ロボット1を作動させてツール5による作業(吸着パッド6によるワークの吸着作業)を行うことができる。また、ツール5が手首軸フランジ2に固定されたままなので、TCP設定作業を行っても、ツール5の手首軸フランジ2への装着位置にずれが生じ難い。
【0032】
(第2実施形態)
次に、本発明の第2実施形態として、ツール5に図5に示す開閉ハンド8を用い、その開閉ハンド8に図6に示すTCP設定用の治具9を着脱可能に取り付けたものを説明する。
【0033】
(ツールとしての開閉ハンド)
図1に示す多関節ロボット1の手首軸フランジ2に、ツール5として装着される開閉ハンド8を図5に示す。図5(a)は開閉ハンド8の平面図、図5(b)は開閉ハンド8の正面図、図5(c)は開閉ハンド8の側面図である。
【0034】
開閉ハンド8は、図1に示す多関節ロボット1の手首軸フランジ2から図1に表された既述のTCP設定用の専用治具3を取り外し、空いた手首軸フランジ2に装着される。開閉ハンド8は、手首軸フランジ2に装着されるケーシング81と、ケーシング81に固定された固定爪82と、固定爪82に対して近接離間移動可能な移動爪83と、移動爪83を移動させるアクチュエータとしてのシリンダ84とを備えている。
【0035】
固定爪82は、ケーシング81に固定された根本部82aと、根本部82aに設けられたピン部82bとを有する。本実施例では、根本部82aにはピン部82bが1本設けられているが2本以上設けてもよい。根本部82aには、後述するTCP設定用の治具9を把持するための凹部82cが形成されている。
【0036】
一方、移動爪83は、ケーシング81内に設けられたガイド(リニアガイド)10に係合してガイド10に沿ってスライド移動可能なスライドブロック11に設けられており、スライドブロック11に固定された根本部83aと、根本部83aに設けられたピン部83bとを有する。本実施形態では、根本部83aにはピン部83bが2本設けられているが1本でもよく3本以上でも構わない。根本部83aには、後述するTCP設定用の治具9を把持するための凹部83cが形成されている。
【0037】
スライドブロック11とシリンダ84の伸縮ロッド84aとは連結金具12で連結されており、シリンダ84の伸縮ロッド84aを伸縮させることでスライドブロック11が移動し、移動爪83が固定爪82に対して離間するようになっている。
【0038】
(TCP設定用の治具)
このような開閉ハンド8に把持されるTCP設定用の治具9を図6に示す。図6(a)はこの治具9の平面図、図6(b)は図6(a)のb−b線断面図、図6(c)は治具の側面図である。
【0039】
治具9は、下面に尖った先端91aをもつ基準ピン9が取り付けられた略方形の板体92と、板体92の上面に一対の取付板93を介して取り付けられた枠板94と、枠板94の上面に取り付けられた被把持部(取付部)95とを備えている。被把持部95は、円柱状に形成されており、枠板の上面に金具96によって取り付けられている。
【0040】
枠板94の窓部94aには、開閉ハンド8の固定爪82及び移動爪83が挿入され、その状態で移動爪83を固定爪82に対して離間させることで、移動爪83の凹部83c及び固定爪82の凹部82cが治具9の被把持部95に係合し、治具9が開閉ハンド8に把持されるようになっている。治具9を開閉ハンド8から解放するときには、移動爪83を固定爪82に近付け、移動爪83の凹部83c及び固定爪82の凹部82cを治具9の被把持部95から離間させる。
【0041】
(TCP設定方法)
本実施形態に係るTCP設定方法においては、先ず、多関節ロボット1の手首軸フランジ2にツール5(開閉ハンド8)をボルトナット等で装着し、開閉ハンド8にTCP設定用の治具9を把持させる。このとき、移動爪83の凹部83c及び固定爪82の凹部82cが治具9の被把持部95に係合することで、治具9の把持位置が精度よく定められる。
【0042】
次に、多関節ロボット1を作動させることで、治具9の基準ピン91の先端91aを図2に示すような基準治具4の基準点4aに移動させ、図2を用いて既述したようにしてTCP設定作業を行う。その後、治具9を開閉ハンド8から取り外し、治具9を取り外した開閉ハンド8でワークの把持作業を行う。
【0043】
(作用・効果)
本実施形態においても、前実施形態と同様に、多関節ロボット1の手首軸フランジ2からツール5(開閉ハンド8)を取り外すことなく、そのツール5にTCP設定を行うための治具9を取り付けてTCP設定作業を行い、作業終了後、治具9をツール5から取り外すようにしている。このため、TCP設定作業の終了後、速やかにツール5による作業(開閉ハンド8によるワークの把持作業)を行うことができる。また、ツール5が手首軸フランジ2に固定されたままなので、TCP設定作業を行っても、ツール5の手首軸フランジ2への装着位置にずれが生じ難い。
【0044】
以上、添付図面を参照しつつ本発明の好適な実施形態について説明したが、本発明は上述した各実施形態に限定されないことは勿論であり、特許請求の範囲に記載された範疇における各種の変更例又は修正例についても、本発明の技術的範囲に属することは言うまでもない。
【産業上の利用可能性】
【0045】
本発明は、多関節ロボットの手首軸フランジに設定されたフランジ座標系に基づいて、手首軸フランジに装着されるツールでのツール座標系を設定する多関節ロボットのツールセンターポイント設定方法、及びツールセンターポイント設定用の治具の取付構造に利用できる。
【符号の説明】
【0046】
1 多関節ロボット(6軸多関節ロボット)
2 手首軸フランジ
4 基準治具
4a 基準点
5 ツール
6 吸着パッド
63a ネジ部(雌ネジ部)
7 治具
74 取付部
8 開閉ハンド
9 治具
95 取付部(被把持部)
XF フランジ座標系
YF フランジ座標系
ZF フランジ座標系
XT ツール座標系
YT ツール座標系
ZT ツール座標系
【特許請求の範囲】
【請求項1】
多関節ロボットの手首軸フランジに設定されたフランジ座標系に基づいて、前記手首軸フランジに装着されるツールでのツール座標系を設定するツールセンターポイント設定方法であって、
前記手首軸フランジにツールを装着し、該ツールに治具を取り付け、前記多関節ロボットを作動させることで、前記治具を前記多関節ロボットが据え付けられた床面に設置された基準治具の基準点に移動させて、フランジ座標系に基づいてツール座標系を設定するツールセンターポイント設定作業を行い、
前記治具を前記ツールから取り外すようにしたことを特徴とする多関節ロボットのツールセンターポイント設定方法。
【請求項2】
多関節ロボットの手首軸フランジに設定されたフランジ座標系に基づいて、前記手首軸フランジに装着されるツールでのツール座標系を設定する際に用いる治具の取付構造であって、
前記手首軸フランジに装着されたツールを前記手首軸フランジから取り外すことなく、ツールセンターポイント設定作業を行うための治具が該ツールに対して着脱可能であることを特徴とする多関節ロボットにおけるツールセンターポイント設定用の治具の取付構造。
【請求項1】
多関節ロボットの手首軸フランジに設定されたフランジ座標系に基づいて、前記手首軸フランジに装着されるツールでのツール座標系を設定するツールセンターポイント設定方法であって、
前記手首軸フランジにツールを装着し、該ツールに治具を取り付け、前記多関節ロボットを作動させることで、前記治具を前記多関節ロボットが据え付けられた床面に設置された基準治具の基準点に移動させて、フランジ座標系に基づいてツール座標系を設定するツールセンターポイント設定作業を行い、
前記治具を前記ツールから取り外すようにしたことを特徴とする多関節ロボットのツールセンターポイント設定方法。
【請求項2】
多関節ロボットの手首軸フランジに設定されたフランジ座標系に基づいて、前記手首軸フランジに装着されるツールでのツール座標系を設定する際に用いる治具の取付構造であって、
前記手首軸フランジに装着されたツールを前記手首軸フランジから取り外すことなく、ツールセンターポイント設定作業を行うための治具が該ツールに対して着脱可能であることを特徴とする多関節ロボットにおけるツールセンターポイント設定用の治具の取付構造。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−82032(P2013−82032A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2011−223550(P2011−223550)
【出願日】平成23年10月11日(2011.10.11)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成23年10月11日(2011.10.11)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
[ Back to top ]