
多関節機構ならびにロボットハンド
【課題】耐久性および施工性に優れた多関節機構ならびにロボットハンドの提供。
【解決手段】直列配置される複数のフレーム3a〜3cと、各フレーム3a〜3cをそれぞれ傾動可能に連結する複数の関節4a〜4cと、前記適宜のフレームを傾動させるための動力を発生する駆動部5bと、この駆動部5bで発生する動力を前記適宜の関節に伝達する動力伝達部7とを含み、動力伝達部7において前記各関節間での動力伝達要素をギアで構成している。
【解決手段】直列配置される複数のフレーム3a〜3cと、各フレーム3a〜3cをそれぞれ傾動可能に連結する複数の関節4a〜4cと、前記適宜のフレームを傾動させるための動力を発生する駆動部5bと、この駆動部5bで発生する動力を前記適宜の関節に伝達する動力伝達部7とを含み、動力伝達部7において前記各関節間での動力伝達要素をギアで構成している。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、屈伸可能な多関節機構、ならびに物体を把持可能とするロボットハンドに関する。
【背景技術】
【0002】
一般的に、ロボットハンドにおいて、人の手に近似した多様な動きを実現して物体を操りやすくするには、多数の関節つまり自由度が必要である。このロボットハンドの指機構は、多数の関節を有し、モーター等の駆動部で発生する動力をワイヤーで各関節に伝達することで、屈伸可能にしている。前記駆動部は、関節の数と同数用いられており、これらの多数の駆動部は、例えば掌に相当する部分に搭載されている(特許文献1参照。)。
【0003】
この場合、関節の数と同数の駆動部を用いているために、ロボットハンドを小型化できない。しかし、単純に駆動部の数を減らすと自由度が少なくなり、多様な動きができなくなる。
【0004】
これに対し、駆動部の数を減らして小型化ならびに低コスト化を図るために、二つの関節を連係して駆動するようにしたものがある(特許文献2参照。)。例えば指機構において、指先の関節と、それに隣接する中間の関節とを連係して動作させるようにしている。このように二つの関節を連係動作させることで、駆動部の数を減らすことはできるが、指機構を細かく動かすことが難しくなる。そのため、ロボットハンドの把持状態を多様に作ることができなくなるので、複雑な形状の物体を把持しにくくなるとともに、物体を操りにくくなる。
【0005】
そこで、二つの関節の連係動作を必要に応じて解除させることができれば、多様なロボットハンドの把持状態を作ることができ、好ましい。上記特許文献2では、関節にある二つのプーリの間に摩擦クラッチを挿入し、連係動作を解除可能にしている。この構成では、指機構に負荷がなければ二つの関節が連係動作して回転するが、摩擦力を超える負荷が指機構にかかると、二つの関節を連係動作させないようになる。
【特許文献1】特開平6−8178号公報
【特許文献2】特開2003−89087号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
上記従来例では、まず、ワイヤー駆動方式であるので、組立時にワイヤーの引き回しが難しく、また、使用経過に伴いワイヤーが緩むおそれがあり、さらにワイヤーの耐久性が不十分であるといった不具合が懸念される。
【0007】
また、上記従来例では、摩擦クラッチを用いて二つの関節の連係動作を解除可能にしているが、この連係動作の解除は任意には行えないので、意図的に多様なロボットハンドの把持状態を作ることができない。しかも、大きな把持力が作用したとき、二つの関節の連係動作が勝手に解除されてしまうため、ロボットハンドの把持状態や条件が制限される等、複雑な形状の物体の把持ができなくなる。このように、従来例のロボットハンドでは、把持した物体を操る時に何らかの制限が加わるなど、より高度な把持動作を行うことができない。
【0008】
そこで、本発明は、上記従来の問題に鑑みてなされたものであり、耐久性および施工性に優れた多関節機構ならびにロボットハンドの提供を目的とする。また、本発明は、小型化および低コスト化を図ったうえで、多様な動きを可能にした多関節機構ならびにロボットハンドの提供を目的とする。
【課題を解決するための手段】
【0009】
本発明に係る多関節機構は、直列配置される複数のフレームと、各フレームをそれぞれ傾動可能に連結する複数の関節と、前記適宜のフレームを傾動させるための動力を発生する駆動部と、この駆動部で発生する動力を前記適宜の関節に伝達する動力伝達部とを備え、前記動力伝達部において前記各関節間での動力伝達要素をギアで構成していることを特徴としている。
【0010】
本発明の多関節機構は、要するに、多関節を有する装置全般に適用される。
【0011】
この場合、動力伝達部としてのギアが、従来例のワイヤーに比べて静的強度ならびに疲労強度に優れている等、耐久性が向上する。しかも、従来例のワイヤーに比べて組み立てやすくなるので、自動組立が可能になる。
【0012】
本発明に係る多関節機構は、直列配置される複数のフレームと、各フレームをそれぞれ傾動可能に連結する複数の関節と、前記複数のフレームのうちの基端フレームを傾動させるための動力を発生する第1駆動部と、前記複数のフレームのうちの中間フレームを駆動するための動力を発生する第2駆動部と、前記第1駆動部で発生する動力を前記基端フレームに伝達する第1動力伝達部と、前記第2駆動部で発生する動力を前記中間フレームに伝達する第2動力伝達部とを備え、前記第2動力伝達部において前記各関節間での動力伝達要素をギアで構成していることを特徴としている。
【0013】
この場合、先端フレームを直接的に駆動する駆動部を備えていないから、構成が簡素となり、小型化、コンパクト化を図るうえで有利となる。
【0014】
好ましくは、前記各関節のうち基端関節は、その両端がベースに固定されかつ前記基端フレームの一端に回動可能に支持される軸とされ、前記中間関節は、その両端が前記基端フレームの他端に固定されかつ前記中間フレームの一端に回動可能に貫通支持される軸とされ、前記先端関節は、その両端が前記中間フレームの他端に固定されかつ前記先端フレームの一端に回動可能に貫通支持される軸とされており、前記第2動力伝達部において前記各関節間での動力伝達要素は、基端関節としての軸に相対回動可能に支持される基端空転ギアと、前記中間フレームに固定されかつ中間関節としての軸に回動可能に支持される中間ギアと、前記基端空転ギアと中間ギアとの間に配置されて互いに噛合する一つまたは複数の基端中継ギアとを含む構成とされる。
【0015】
この場合、各関節の構成や、動力伝達部の構成を特定したものであり、上記同様、耐久性ならびに施工性の向上が可能になる。
【0016】
好ましくは、前記複数のフレームのうちの先端フレームを前記中間フレームの傾動動作に連係させる連係状態と、前記先端フレームを前記中間フレームに対し自由に傾動可能とする連係解除状態とを意図的に実現する切り替え部を備えた構成とされる。
【0017】
この場合、連係解除状態にすると、先端フレームが中間フレームに対し自由に傾動可能な状態になるから、この先端フレームを適宜の物体に当接させるときに、先端フレームの広範囲を前記物体に沿わせた状態で当接させることが可能になる。
【0018】
好ましくは、前記切り替え部は、中間関節としての軸で前記中間ギアと隣り合わせに回動可能に支持される中間空転ギアと、前記先端フレームに固定されかつ先端関節としての軸に回動可能に支持される先端ギアと、前記中間空転ギアと前記先端ギアとの間に配置されて互いに噛合する一つまたは複数の中間中継ギアと、この中間空転ギアを非回転に拘束して前記連係状態にしたりあるいは中間空転ギアの回転を許容して前記連係解除状態にしたりするストッパーとを含む構成とされる。
【0019】
この場合、切り替え部もギアで構成しているから、上記同様、耐久性ならびに施工性の向上が可能になる。
【0020】
好ましくは、前記ストッパーは、前記中間空転ギアの歯間に嵌入されて前記中間空転ギアを非回転に拘束する係止片と、この係止片を前記中間空転ギアの歯間に嵌入させるよう突出させたり前記中間空転ギアの歯間から抜くよう後退させたりする動作部とを含む構成とされる。
【0021】
この場合、ストッパーを係止片と動作部のみの簡単な構成にしているから、設備コストを抑制するうえで有利となる。
【0022】
好ましくは、前記動作部は、ソレノイドで構成することができる。好ましくは、前記動作部は、高分子アクチュエータで構成することができる。
【0023】
これらの場合、ストッパーの動作部を比較的小型でかつ安価なものとすることが可能になり、占有スペースおよび設備コストを抑制するうえで有利となる。
【0024】
好ましくは、前記先端フレームとそれに連結される中間フレームとに、当該先端フレームを前記中間フレームに対し一傾動方向に傾動させるよう弾発付勢するバネを設けることができる。
【0025】
この場合、連係解除状態において、先端フレームが中間フレームの傾動方向と反対向きに安易に動きにくくなり、また、先端フレームが物体に当接したときに、物体に当接した状態を保ちやすくなる。
【0026】
好ましくは、必要に応じて前記駆動部を駆動または非駆動にして前記各フレームの傾動動作を制御する制御部を有する構成とされる。
【0027】
好ましくは、前記各関節には、互いに連結するフレーム間の相対的な傾きを測定する角度センサを設けることができる。
【0028】
この場合、角度センサの出力に基づき各フレームの傾き角度を認識することが可能になる。
【0029】
好ましくは、前記制御部は、前記連係状態において前記各フレームを傾動させるとき、前記角度センサの出力に基づき前記各フレームの姿勢を認識し、要求される姿勢にする処理を実行するものとされる。
【0030】
この場合、各フレームの傾き角度の調整が比較的容易かつ高精度に行えるようになる。
【0031】
好ましくは、前記先端フレームには、力覚センサを設けることができる。この場合、力覚センサの出力に基づき先端フレームの物体に対する接触状態を認識することが可能になる。
【0032】
好ましくは、前記制御部は、前記連係状態において前記各フレームを傾動させている過程で前記先端フレームが物体に接触したときに前記力覚センサの出力に基づき前記切り替え部の駆動部によりストッパーを後退させて前記中間空転ギアを回転可能な連係解除状態にする処理を実行するものとされる。
【0033】
この場合、先端フレームを物体に任意の状態で当接させることが可能になり、多関節機構の動きを多様化できる。
【0034】
本発明に係るロボットハンドは、ベースと、このベースにそれぞれ片持ち梁状に支持されかつ突出方向複数箇所に関節を有する複数の指機構とを含むものであって、前記複数の指機構のうち少なくとも一つが、上述した多関節機構とされることを特徴としている。
【0035】
この場合、ロボットハンドの指機構の動きを多様化できるようになり、人の指の動きに近似した高度な動きが可能になる。
【0036】
ここでのロボットハンドは、適宜の物体を把持するような人の手(手首より先の部分)として利用されるが、その他、人の足(足首より先の部分)や、腕や足の構成と類似した機構を有するロボットとしても利用することが可能である。
【発明の効果】
【0037】
本発明によれば、耐久性および施工性に優れた多関節機構ならびにロボットハンドを提供することができる。また、本発明は、小型化および低コスト化を図ったうえで、多様な動きを可能にした多関節機構ならびにロボットハンドを提供することができる。
【発明を実施するための最良の形態】
【0038】
以下、本発明の実施形態を図面に基づいて説明する。
【0039】
〔多関節機構の説明〕
図1から図8を参照して、多関節機構1の最良の実施形態を説明する。この多関節機構1は、例えばロボットハンドの指機構等として利用される。
【0040】
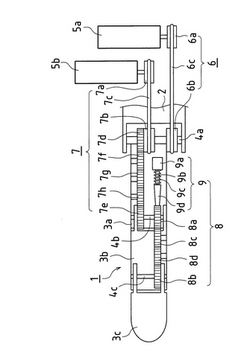
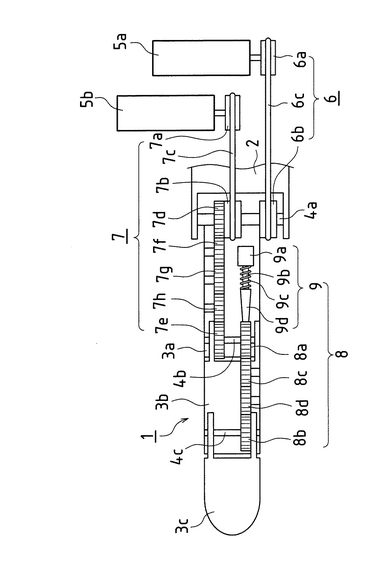
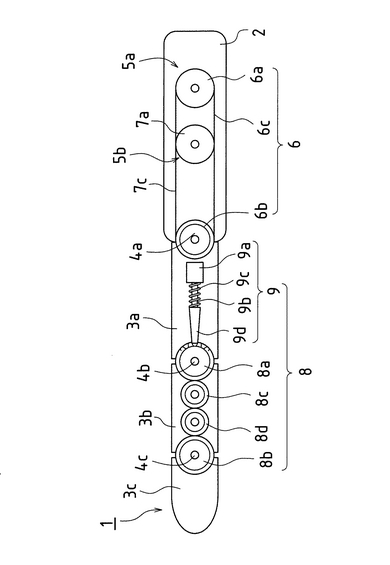
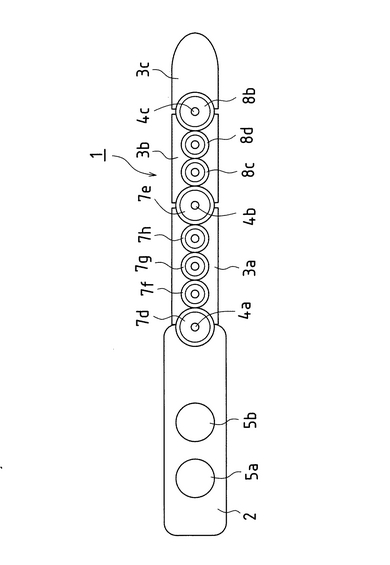
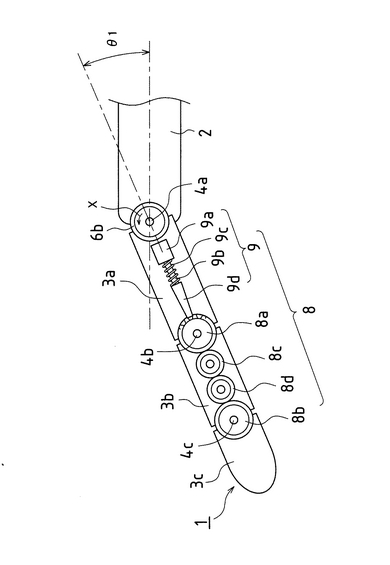
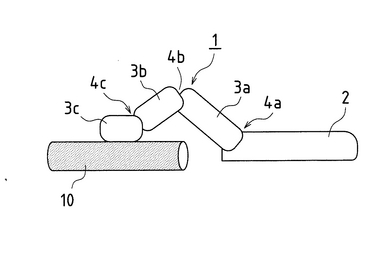
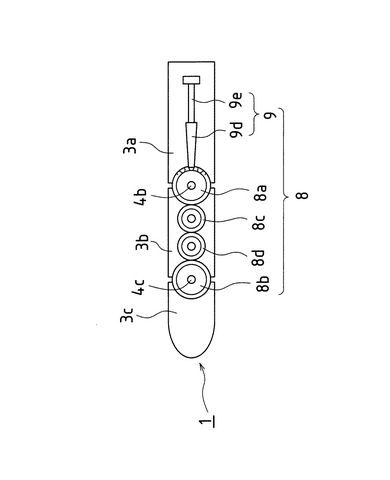
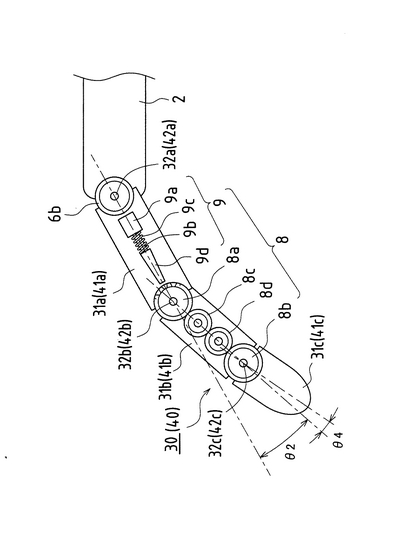
多関節機構1は、図1から図3に示すように、直列に配置した三つのフレーム3a,3b,3cを三つの関節4a,4b,4cでそれぞれ傾動可能に連結した状態でベース2に片持ち梁状に支持されており、二つの駆動部5a,5bと2系統の動力伝達部6,7と切り替え部8とでもって、三つのフレーム3a〜3cを三つの関節4a〜4cを中心として傾動させるようになっている。
【0041】
以下、各部を詳細に説明する。
【0042】
ベース2には、基端フレーム3aの一端が基端関節4aを介して傾動可能に支持されており、この基端フレーム3aの他端には、中間フレーム3bの一端が中間関節4bを介して傾動可能に支持されており、この中間フレーム3bの他端には、先端フレーム3cが先端関節4cを介して傾動可能に支持されている。
【0043】
各関節4a〜4cは、隣り合うフレーム3a〜3cそれぞれを傾動可能に連結する軸とされている。詳しくは、基端関節4aは、両端がベース2に固定されかつ基端フレーム3aの一端に回動可能に貫通支持される軸とされている。中間関節4bは、両端が基端フレーム3aの他端に固定されかつ中間フレーム3bの一端に回動可能に貫通支持される軸とされている。先端関節4cは、両端が中間フレーム3bの他端に固定されかつ先端フレーム3cの一端に回動可能に貫通支持される軸とされている。
【0044】
第1、第2駆動部5a,5bは、いずれも、例えばモーター等からなり、ベース2に搭載されている。第1駆動部5aは、基端フレーム3aを傾動するための回転動力を発生するものであり、第2駆動部5bは、中間フレーム3bを傾動するための回転動力を発生するものである。
【0045】
第1動力伝達部6は、第1駆動部5aで発生する回転動力を基端関節4aに伝達するものである。この第1動力伝達部6は、図1および図2に示すように、第1駆動部5aの出力軸(符号省略)に固定される第1プーリ6aと、基端フレーム3aに固定されかつ基端関節4aとしての軸の一端側に回動可能に貫通支持される基端プーリ6bと、第1プーリ6aと基端プーリ6bとに跨って巻き掛けられる第1ワイヤー6cとで構成されている。
【0046】
第2動力伝達部7は、第2駆動部5bで発生する回転動力を中間関節4bに伝達するものである。この第2動力伝達部7は、図1から図3に示すように、第2駆動部5aの出力軸(符号省略)に固定される第2プーリ7aと、基端関節4aとしての軸の他端側で基端プーリ6bと隣り合わせに回動可能に貫通支持される基端空転プーリ7bと、第2プーリ7aと基端空転プーリ7bとに跨って巻き掛けられる第2ワイヤー7cと、基端空転プーリ7bと一体に形成される基端空転ギア7dと、中間フレーム3bに固定されかつ中間関節4bとしての軸の一端側に回動可能に貫通支持される中間ギア7eと、基端空転ギア7dと中間ギア7eとの間に配置されて互いに噛合する三つの基端中継ギア7f,7g,7hとで構成されている。
【0047】
なお、三つの基端中継ギア7f,7g,7hは、支軸(符号省略)を介して基端フレーム3aに回動可能に支持されている。この基端中継ギア7f,7g,7hの数は特に限定されないが、中間ギア7eを基端空転ギア7dと同一方向に回転させるには奇数とする必要がある。しかし、第2駆動部であるモーター5bを反転させれば済むことなので、中間ギア7eと基端空転ギア7dは同一方に回転させる必要はない。
【0048】
切り替え部8は、先端フレーム3cを中間フレーム3bの傾動動作に連係させて傾動させる連係状態と、先端フレーム3cを中間フレーム3bの傾動動作に連係させずに自由傾動可能とする連係解除状態とに切り替えるものである。
【0049】
この切り替え部8は、図1および図2に示すように、中間関節4bとしての軸の他端側で中間ギア7eと隣り合わせに回動可能に貫通支持される中間空転ギア8aと、先端フレーム3cに固定されかつ先端関節4cとしての軸の一端側に回動可能に貫通支持される先端ギア8bと、中間空転ギア8aと先端ギア8bとの間に配置されて互いに噛合する二つの中間中継ギア8c,8dと、中間空転ギア8aを非回転に拘束する状態と回転を許容する状態とに切り替えるストッパー9とで構成されている。
【0050】
なお、二つの中間中継ギア8c,8dは、支軸(符号省略)を介して中間フレーム3bに回動可能に支持されている。この中間中継ギア8c,8dの数は特に限定されないが、先端ギア8bを中間ギア7eと同一方向に回転させるには偶数とする必要がある。
【0051】
ところで、ストッパー9は、ソレノイドで構成されている。このソレノイドからなるストッパー9は、図2に示すように、円筒形の電磁石9aと、電磁石9aの中心に一端側が突出する状態でかつ非接触となる状態で挿入される可動鉄心9bと、可動鉄心9bの突出端側外周に巻回されるコイル9cと、可動鉄心9bの突出端に一直線上に連結された係止片9dとから構成されている。
【0052】
このストッパー9の動作としては、可動鉄心9bを突出させることによって係止片9dを中間空転ギア8aの歯間に嵌入させている場合に、中間空転ギア8aを非回転に拘束する状態にすることができ、また、可動鉄心9bを後退させることによって係止片9dを中間空転ギア8aの歯間から抜き出している場合に、中間空転ギア8aの回転を許容する状態とすることができる。
【0053】
このソレノイドからなるストッパー9は、電磁石9aへの通電時に可動鉄心9bを突出させて、非通電時に可動鉄心9bが後退している構成になっている。但し、ストッパー9は、非通電時に可動鉄心9bが突出した状態で保持される構成であってもよい。
【0054】
また、電磁石9aは、係止片9dを進退変位させるだけであってパワーの小さなもので十分であるから、ソレノイドからなるストッパー9を基端フレーム3aに収納配置でき、全体の小型化が可能になる。但し、ストッパー9はベース2側に配置してもよい。
【0055】
次に、動作を説明する。
【0056】
まず、第1駆動部5aを駆動すると、例えば第1ワイヤー6cを介して基端プーリ6bが図4の矢印X方向(反時計方向)に回転されるので、図4に示すように、この基端プーリ6bと一体の基端フレーム3aが基端プーリ6bと同方向(下向き)に傾動される。これにより、基端フレーム3aがベース2に対して所定角度θ1傾く。
【0057】
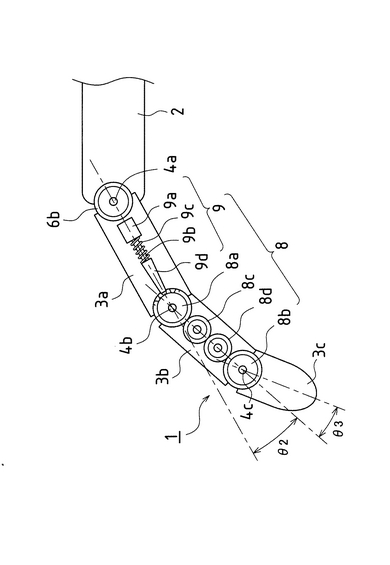
また、第2駆動部5bを第1駆動部5aと同様に駆動すると、例えば第2ワイヤー7cを介して基端空転プーリ7bが回転されるとともに、基端空転プーリ7bと一体回転する基端空転ギア7dによって三つの基端中継ギア7f,7g,7hを介して中間ギア7eが基端空転ギア7dと同方向に回転されるので、この中間ギア7eと一体の中間フレーム3bが中間ギア7eと同方向(下向き)に傾動される。これにより、図5に示すように、中間フレーム3bが基端フレーム3aに対して所定角度θ2傾く。
【0058】
このとき、ストッパー9の係止片9dを中間空転ギア8aの歯間に嵌入させて、中間空転ギア8aを非回転に拘束している場合、図5に示すように、中間フレーム3bの傾動動作によって非回転の中間空転ギア8aと噛合する二つの基端中継ギア8c,8dが自転しながら中間空転ギア8aの外周を中間フレーム3bの傾動方向と同方向に公転されるので、先端ギア8bが中間フレーム3bの傾動方向と同方向に回転され、この先端ギア8bと一体の先端フレーム3cが中間フレーム3bの傾動方向と同方向(下向き)に傾動される。これにより、先端フレーム3cが中間フレーム3bに対して所定角度θ3傾く。
【0059】
つまり、中間空転ギア8aを非回転に拘束すると、第2駆動部5bで発生する動力を中間関節4bを介して先端関節4cに伝達することができるので、先端フレーム3cを中間フレーム3bの傾動動作に連係して傾動させる連係状態にできる。
【0060】
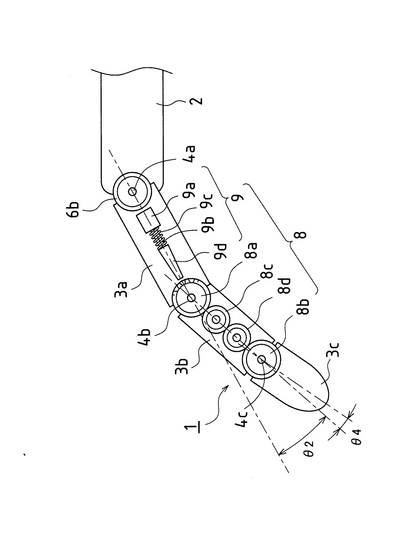
一方、ストッパー9の係止片9dを中間空転ギア8aの歯間から抜き出して、中間空転ギア8aを自由回転可能にしている場合、図6に示すように、中間フレーム3bが傾動しても中間空転ギア8aと噛合する基端中継ギア8c,8dが自転されなくなるので、先端ギア8bと一体の先端フレーム3cは傾動されなくなる。但し、先端ギア8bは何れにも拘束されていないので、先端ギア8bと一体の先端フレーム3cは先端関節4cを支点として上下いずれの方向にも傾動可能になっている。なお、図6の状態では、先端フレーム3cが自重により中間フレーム3bに対し下向きに所定角度θ4傾くことになる。
【0061】
つまり、中間空転ギア8aを自由回転可能にすると、第2駆動部5bで発生する動力を基端フレーム3aから中間フレーム3bまで伝達するものの、中間フレーム3bから先端フレーム3cへの伝達を遮断することができるので、先端フレーム3cを中間フレーム3bの傾動動作に連係させない自由傾動可能な連係解除状態にできる。
【0062】
このような多関節機構1において、棒状の物体10に対する先端フレーム3cの当接状態を説明する。
【0063】
まず、切り替え部8を連係状態にしている場合、棒状の物体10に先端フレーム3cを当接させようとすると、例えば図7に示すように、中間フレーム3bおよび先端フレーム3cが連係してそれぞれ傾動するために、棒状の物体10の外周面に対して先端フレーム3cの先端縁が当接することになる。
【0064】
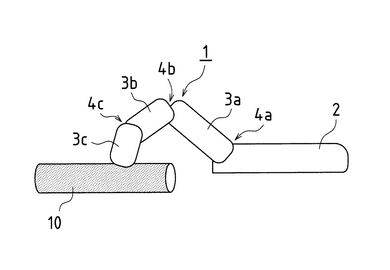
しかし、切り替え部8を連係状態にしておいて、中間フレーム3bを基端フレーム3aに対し所定角度傾動させた後で、切り替え部8を連係解除状態にすると、中間フレーム3bに対し先端フレーム3cが自由に傾動可能になるので、棒状の物体10の外周面に先端フレーム3cの先端角が当接しても、この先端フレーム3cが中間フレーム3bの傾動方向と反対向き(図の上向き)に動くことになって、図8に示すように、先端フレーム3cの側面が棒状の物体10の外周面に沿って当接するようになる。このように先端フレーム3cの側面部分の広範囲が棒状の物体10の外周面に当接する。この時点で、再度、切り替え部8を連係状態にすれば、前記当接状態を維持できるようになる。
【0065】
以上説明した多関節機構1によれば、次のような効果が得られる。
【0066】
まず、第2動力伝達部7において、基端関節4aから中間関節4bまでの動力伝達要素をギア機構(7b〜7h)で行うようにしているとともに、中間関節4bから先端関節4cまでの動力伝達要素をギア機構(8a〜8d)で行うようにしているから、従来例のワイヤーを用いる場合に比べて静的強度ならびに疲労強度に優れている等、耐久性が向上するとともに、従来例のワイヤーを用いる場合に比べて組み立てやすくなるので、自動組立が可能になる等、施工性が向上する。
【0067】
また、駆動部の数を関節の数より少なくしているので、小型化ならびに低コスト化を図ることができる。このように駆動部の数を関節の数より少なくしても、すべてのフレーム3a〜3cをそれぞれ独立して傾動させることが可能になるので、多様な動きを可能にすることができる。
【0068】
以下、本発明の多関節機構1の他の実施形態について説明する。
【0069】
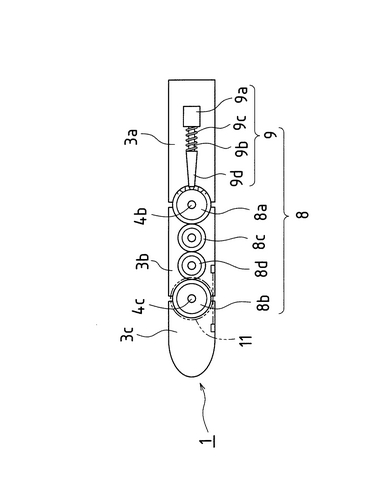
(1)上記ストッパー9は、長さを電気的に可変制御できる高分子アクチュエータ9eで構成することができる。この場合、例えば図9に示すように、ストッパー9としての高分子アクチュエータ9eの先端に係止片9dを連結する。この高分子アクチュエータ9eでは、その長さを長くして係止片9dを中間空転ギア8aの歯間に嵌入させると、中間フレーム3bと先端フレーム3cとを連係させて動かすことができる。一方、高分子アクチュエータ9eの長さを短くして係止片9dを中間空転ギア8aの歯間から抜き出すと、中間フレーム3bと先端フレーム3cとの連係動作を解除できる。なお、係止片9dを後退させる力は小さくてよく、また係止片9dの変位ストロークも中間空転ギア8aの歯の高さ程度と短くてよいので、高分子アクチュエータ9eに要求される仕様は厳しくならずに済む。しかも、高分子アクチュエータ9eは、上述したソレノイドよりも軽量、小型であるので、基端フレーム3a内部に収納配置しやすくなり、好ましい。
【0070】
(2)上記実施形態において、中間フレーム3bと先端フレーム3cとの連係解除状態では、先端フレーム3cが自由に回動できるので、例えば図10に示すように、中間フレーム3bと先端フレーム3cとに跨って、先端フレーム3cを中間フレーム3bに対し下向きに弾性的に傾かせるためのバネ11を組み込むようにしてもよい。図10において、バネ11は、一点鎖線で示している。
【0071】
この場合、連結解除状態において、バネ11の弾性復元力によって先端フレーム3cが自由に回転せずに一方向に傾くようになるので、先端フレーム3cを当接対象となる物体10に当接させた状態において、先端フレーム3cが物体10から離れることが防止される。
【0072】
このようなバネ11の弾性復元力であるが、多関節機構1の使用対象に応じて適宜設定すればよい。仮に、バネ11の弾性復元力を大きくすると、連係解除状態において物体10に対する接触圧が強くなりすぎて好ましくない場合が生ずる。そこで、バネ11の弾性復元力を、例えば関節のロストルク以下に設定すれば、大きな外力が作用しない限り、先端フレーム3cが勝手に一方向に傾動することはない。どれくらいのバネ定数を設定するかは多関節機構1の使用対象に応じて適宜決定すればよい。但し、図示していないが、先端フレーム3cの先端ギア8bを、ストッパーなどで完全に止めることも可能であるが、連係解除状態では、先端フレーム3cを、ある程度自由に回動可能とするほうが好ましい。
【0073】
(3)上記実施形態において、第1動力伝達部6のワイヤー機構(6a〜6c)および第2動力伝達部7のワイヤー機構(7a〜7c)を、図示していないが、ギア機構とすることができる。
【0074】
(4)上記実施形態では、3つのフレームを3つの関節で傾動可能に連結した構成の多関節機構1を例に挙げているが、3つ以上のフレームを3つ以上の関節で傾動可能に連結した構成であっても、本発明を適用できる。その場合、連係状態や連係解除状態とに切り替える対象となる2つのフレームとしては、先端フレームとそれに連結される中間フレームが望ましい。しかしこれに限定されるわけではなく、多関節機構の中間部にある2つのフレームを連携状態や、連係解除状態とに切り替える対象としてもよい。これは、多関節機構の用途によって決めてやればよい。
【0075】
〔ロボットハンドの説明〕
図11から図23を参照して、本発明に係るロボットハンドの実施形態を説明する。ここでのロボットハンドは、人の手に対応した形状にした例を挙げている。
【0076】
ロボットハンドは、手のひらに相当するベース15に、例えば五本の指機構20,30,40,50,60をそれぞれ片持ち梁状に支持させた構成である。
【0077】
第1〜第5指機構20〜60は、以下で詳細に説明するように、それぞれ、駆動部(本実施の形態ではモーター)および動力伝達部を介して適宜多様な動きができるようになっている。
【0078】
この実施形態のロボットハンドでは、第2指機構30および第3指機構40に、上記多関節機構1と同様の構成を適用している。
【0079】
まず、第1指機構20、第4指機構50ならびに第5指機構60を説明してから、第2指機構30および第3指機構40を説明する。
【0080】
〔第1指機構20〕
第1指機構20は、図11から図13に示すように、親指に相当するものであり、直列に配置した三つのフレーム21a,21b,21cを三つの関節22a,22b,22cでそれぞれ傾動可能に連結した構成である。
【0081】
三つのフレーム21a,21b,21cのうち、基端フレーム21aは、第1アングル23に基端関節22aを介して傾動可能に支持されている。この第1アングル23は、付け根関節としての回転軸24を介してベース15に支持されている。回転軸24の中心軸線は、各関節22a〜22cの中心軸線と略直交している。
【0082】
この第1指機構20は、三つのフレーム21a,21b,21cが第1、第2、第3駆動部25a,25b,25cで個別に傾動され、第1指機構20全体が第4駆動部25dで回転軸24周りに旋回されるようになっており、計四つの自由度を有している。
【0083】
第1〜第3駆動部25a〜25cは、第1アングル23に搭載されており、詳細に図示していないが、3系統の動力伝達部を介して三つのフレーム21a〜21cを三つの関節22a〜22cを支点としてそれぞれ個別に傾動させる。
【0084】
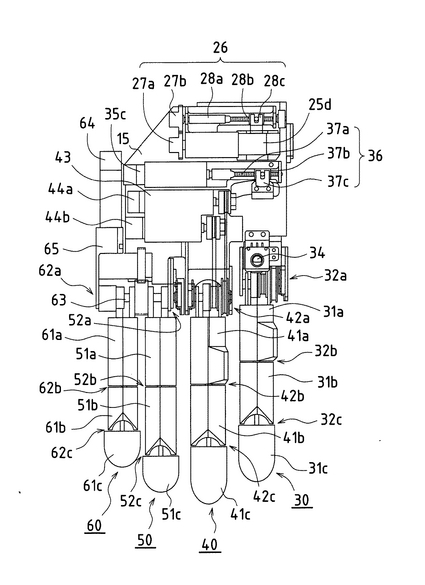
第4駆動部25dは、ベース15に搭載されており、直動―回転変換部26を介して第1アングル23を回転軸24を支点として回転させる。直動―回転変換部26は、ベース15上に回転可能に支持されるスクリュー28aと、スクリュー28aに螺合されるナット28bと、ナット28bに一体化されかつ回転軸24に固定された揺動アーム28cと、第4駆動部25dの出力軸(符号省略)に固定され駆動ギア27aと、スクリュー28aの一端に固定されかつ駆動ギア27aに噛合される従動ギア27aとを有している。スクリュー28aおよびナット28bは、送りねじ機構を構成している。
【0085】
この第1指機構20の動作を説明する。
【0086】
(a)第1駆動部25aを駆動すると、基端関節22aを支点として、基端フレーム21a、中間フレーム21bおよび先端フレーム21cの全体が一体的に傾動する。
【0087】
(b)第2駆動部25bを駆動すると、中間関節22bを支点として、中間フレーム21bおよび先端フレーム21cが一体的に傾動する。
【0088】
(c)第3駆動部25cを駆動すると、先端関節22cの中心を支点として、指先フレーム21cのみが傾動する。
【0089】
(d)第4駆動部25dを駆動すると、駆動ギア27aおよび従動ギア27bを介してスクリュー28aが回転される。このスクリュー28aの回転に伴いナット28bがスクリュー28aに沿って直線的に往復移動し、このナット28bと一体の揺動アーム28cが一方向に所定角度回転するので、第1指機構20全体が回転軸24を中心に旋回する。第1指機構20の旋回方向は、スクリュー28aの回転方向を変換することでコントロールできる。
【0090】
〔第4指機構50および第5指機構60〕
図11から図13に示すように、第4指機構50は、薬指に相当するものであり、直列に配置した三つのフレーム51a,51b,51cを三つの関節52a,52b,52cでそれぞれ傾動可能に連結した構成である。第5指機構60は、小指に相当するものであり、直列に配置した三つのフレーム61a,61b,61cを三つの関節62a,62b,62cでそれぞれ傾動可能に連結した構成である。
【0091】
第4指機構50および第5指機構60は、図11および図13に示すように、回転軸63によって連結されている。この回転軸63を第10駆動部64の動力で回転させることによって第4指機構50および第5指機構60を連係して屈伸させる。第10駆動部64はアングル65に搭載されている。第10駆動部64と回転軸63とは例えばギア機構(図示省略)によって連結されているが、このギア機構の詳細な構成は省略する。
【0092】
この第4指機構50および第5指機構60の動作を説明する。第10駆動部64を駆動すると、第5指機構60が基端関節62aを支点として、基端フレーム61a、中間フレーム61bおよび先端フレーム61cの全体が傾動する。このとき、基端フレーム61aの傾動動作に連係して中間フレーム61bが傾動し、この中間フレーム61bの傾動動作に連係して先端フレーム61cが傾動するようになっている。なお、第4指機構50は第5指機構60と連結されているので、第5指機構60と同じ動きをする。このように、第4、第5指機構50,60は、合わせて一つの自由度を有している。
【0093】
〔第2指機構30〕
図11および図14に示すように、第2指機構30は、人差し指に相当するものであり、直列に配置した三つのフレーム31a,31b,31cを三つの関節32a,32b,32cでそれぞれ傾動可能に連結した構成である。
【0094】
三つのフレーム31a〜31cのうち、基端フレーム31aは、第2アングル33に基端関節32aを介して傾動可能に支持されている。この第2アングル33は、付け根関節としての回転軸34を介してベース15に支持されている。回転軸34の中心軸線は、各関節32a〜32cの中心軸線と略直交している。
【0095】
この第2指機構30は、三つのフレーム31a〜31cが第5、第6駆動部35a,35bで傾動され、第2機構30全体が第7駆動部35cで付け根関節としての回転軸34周りに旋回されるようになっている。
【0096】
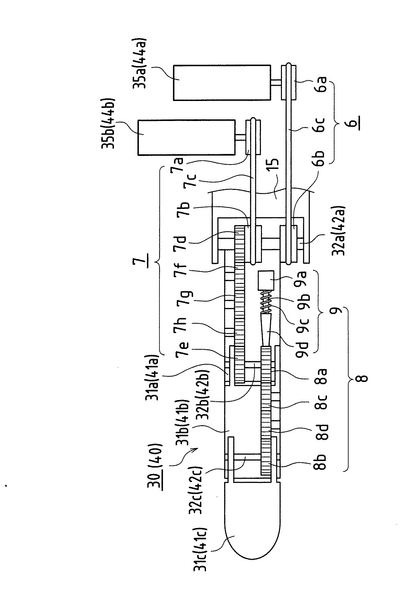
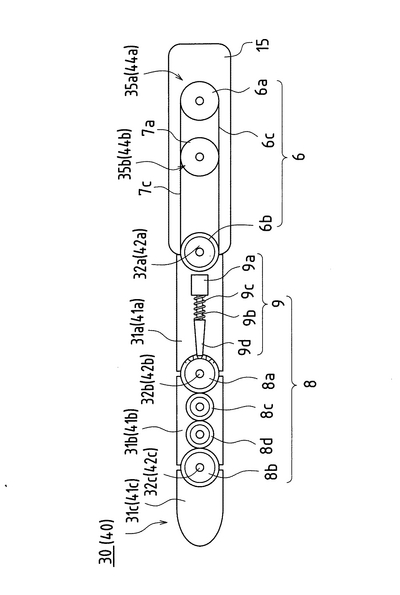
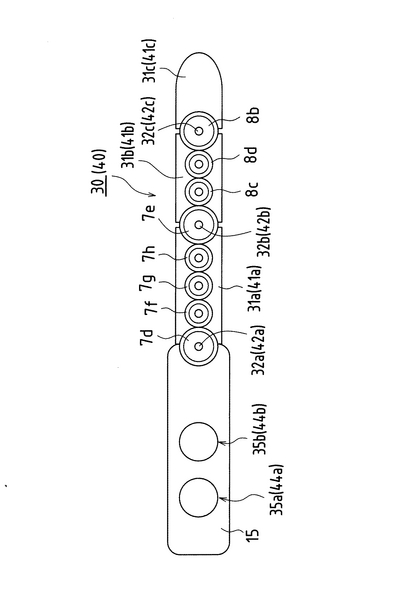
第5、第6駆動部35a,35bは、第2アングル33に搭載されており、図16から図18に示すように、第1、第2動力伝達部6,7を介して、基端フレーム31aと中間フレーム31bとを基端関節32aと中間関節32bとを支点としてそれぞれ個別に傾動させるようになっている。そして、先端フレーム31cは、図17に示すように、切り替え部8によって、中間フレーム31bと連係して駆動する連係状態と連係しない連係解除状態とに切り替えられるようになっている。
【0097】
第7駆動部35cは、図11に示すように、ベース15に搭載されており、直動―回転変換部36を介して第2アングル33を付け根関節としての回転軸34を支点として旋回させる。
【0098】
直動―回転変換部36は、第7駆動部35cの出力軸(符号省略)に固定されるスクリュー37aと、スクリュー37aに螺合されるナット37bと、ナット37bに一体化されかつ回転軸34に固定された揺動アーム37cとを有している。
【0099】
スクリュー37aおよびナット37bが送りねじ機構を構成している。スクリュー37aは、ベース15上に回転可能に支持されている。
【0100】
直動―回転変換部36の動作としては、第7駆動部35cを駆動すると、直動―回転変換部36のスクリュー37aが回転される。このスクリュー37aの回転に伴いナット37bがスクリュー37aに沿って直線的に往復移動し、このナット37bと一体の揺動アーム37cが一方向に所定角度回転するので、第2指機構30全体が回転軸34を中心に旋回する。第2指機構30の旋回方向は、スクリュー37aの回転方向を変換することでコントロールできる。
【0101】
〔第3指機構40〕
図11および図20に示すように、第3指機構40は、中指に相当するものであり、直列に配置した三つのフレーム41a,41b,41cを三つの関節42a,42b,42cでそれぞれ傾動可能に連結した構成である。
【0102】
三つのフレーム41a〜41cのうち、基端フレーム41aは、第3アングル43に基端関節42aを介して傾動可能に支持されている。この第3アングル43は、ベース15に固定されており、この第3アングル43には、三つのフレーム41a〜41cを傾動させるための第8、第9駆動部44a,44bが搭載されている。
【0103】
この第3指機構40は、三つのフレーム41a〜41cが第8、第9駆動部44a,44bで傾動されるようになっている。
【0104】
そして、上記第2指機構30および第3指機構40には、それぞれ、図1から図10に示した多関節機構1における第1、第2動力伝達部6,7および切り替え部8と同一の機構を備えているので、以下で簡単に説明する。
【0105】
第1動力伝達部6は、第5駆動部35a(第8駆動部44a)で発生する回転動力を基端関節32a(42a)に伝達するものである。この第1動力伝達部6は、図16および図17に示すように、第5駆動部35a(第8駆動部44a)の出力軸(符号省略)に固定される第1プーリ6aと、基端フレーム31a(41a)に固定されかつ基端関節32a(42a)としての軸の一端側に回動可能に貫通支持される基端プーリ6bと、第1プーリ6aと基端プーリ6bとに跨って巻き掛けられる第1ワイヤー6cとで構成されている。
【0106】
第2動力伝達部7は、第6駆動部35b(第9駆動部44b)で発生する回転動力を中間関節32b(42b)に伝達するものである。この第2動力伝達部7は、図16から図18に示すように、第6駆動部35b(第9駆動部44b)の出力軸(符号省略)に固定される第2プーリ7aと、基端関節32a(42a)としての軸の他端側で基端プーリ6bと隣り合わせに回動可能に貫通支持される基端空転プーリ7bと、第2プーリ7aと基端空転プーリ7bとに跨って巻き掛けられる第2ワイヤー7cと、基端空転プーリ7bと一体に形成される基端空転ギア7dと、中間フレーム31b(41b)に固定されかつ中間関節32b(42b)としての軸の一端側に回動可能に貫通支持される中間ギア7eと、基端空転ギア7dと中間ギア7eとの間に配置されて互いに噛合する三つの基端中継ギア7f,7g,7hとで構成されている。なお、三つの基端中継ギア7f,7g,7hは、支軸(符号省略)を介して基端フレーム31a(41a)に回動可能に支持されている。
【0107】
切り替え部8は、先端フレーム31c(41c)を中間フレーム31b(41b)の傾動動作に連係させて傾動させる連係状態と、先端フレーム31c(41c)を中間フレーム31b(41b)の傾動動作に連係させずに自由傾動可能とする連係解除状態とに切り替えるものである。
【0108】
この切り替え部8は、図16および図17に示すように、中間関節32b(42b)としての軸の他端側で中間ギア7eと隣り合わせに回動可能に貫通支持される中間空転ギア8aと、先端フレーム31c(41c)に固定されかつ先端関節32c(42c)としての軸の一端側に回動可能に貫通支持される先端ギア8bと、中間空転ギア8aと先端ギア8bとの間に配置されて互いに噛合する二つの中間中継ギア8c,8dと、中間空転ギア8aを非回転に拘束する状態と回転を許容する状態とに切り替えるストッパー9とで構成されている。なお、二つの中間中継ギア8c,8dは、支軸(符号省略)を介して中間フレーム31b(41b)に回動可能に支持されている。
【0109】
なお、ストッパー9は、ソレノイドで構成されている。このソレノイドからなるストッパー9は、円筒形の電磁石9aと、電磁石9aの中心に一端側が突出する状態でかつ非接触となる状態で挿入される可動鉄心9bと、可動鉄心9bの突出端側外周に巻回されるコイル9cと、可動鉄心9bの突出端に一直線上に連結された係止片9dとから構成されている。
【0110】
次に、上記第2指機構30および第3指機構40の動作を説明する。
【0111】
まず、第5駆動部35a(第8駆動部44a)を駆動すると、基端関節32a(基端関節42a)を支点として、基端フレーム31a(基端フレーム41a)、中間フレーム31b(中間フレーム41b)および先端フレーム31c(先端フレーム41c)の全体が一体的に傾動する。
【0112】
また、第6駆動部35b(第9駆動部44b)を駆動すると、中間関節32b(中間関節42b)を支点として、中間フレーム31b(中間フレーム41b)および先端フレーム31c(先端フレーム41c)が一体的に傾動する。
【0113】
このとき、切り替え部8によって、ストッパー9の係止片9dを中間空転ギア8aの歯間に嵌入させて、中間空転ギア8aを非回転に拘束している場合、図19に示すように、中間フレーム31b(中間フレーム41b)が所定角度θ2傾くと、その傾動動作によって非回転の中間空転ギア8aと噛合する二つの基端中継ギア8c,8dが自転しながら中間空転ギア8aの外周を中間フレーム31b(中間フレーム41b)の傾動方向と同方向に公転されるので、先端ギア8bが中間フレーム31b(中間フレーム41b)の傾動方向と同方向に回転され、この先端ギア8bと一体の先端フレーム31c(先端フレーム41c)が中間フレーム31b(中間フレーム41b)の傾動方向と同方向(下向き)に傾動される。これにより、先端フレーム31c(先端フレーム41c)が中間フレーム31b(中間フレーム41b)に対して所定角度θ3傾く。
【0114】
つまり、中間空転ギア8aを非回転に拘束すると、第2駆動部5bで発生する動力を中間関節4bを介して先端関節4cに伝達することができるので、先端フレーム31c(先端フレーム41c)を中間フレーム31b(中間フレーム41b)に連係して傾動動作させる連係状態にできる。
【0115】
一方、ストッパー9の係止片9dを中間空転ギア8aの歯間から抜き出して、中間空転ギア8aを自由回転可能にしている場合、図20に示すように、中間フレーム31b(中間フレーム41b)が所定角度θ2傾いても、中間空転ギア8aと噛合する基端中継ギア8c,8dが自転されなくなるので、先端ギア8bと一体の先端フレーム31c(先端フレーム41c)は傾動されなくなる。但し、先端ギア8bは何れにも拘束されていないので、先端ギア8bと一体の先端フレーム31c(先端フレーム41c)は先端関節4cを支点として上下いずれの方向にも傾動可能になっている。なお、図20の状態では、先端フレーム31c(先端フレーム41c)が自重により中間フレーム31b(中間フレーム41b)に対し下向きに所定角度θ4傾くことになる。
【0116】
つまり、中間空転ギア8aを自由回転可能にすると、第2駆動部5bで発生する動力を基端フレーム31a(基端フレーム41a)から中間フレーム31b(中間フレーム41b)まで伝達するものの、中間フレーム31b(中間フレーム41b)から先端フレーム31c(先端フレーム41c)への伝達を遮断することができるので、先端フレーム31c(先端フレーム41c)を中間フレーム31b(中間フレーム41b)に連係して傾動動作させない自由傾動可能な連係解除状態にできる。
【0117】
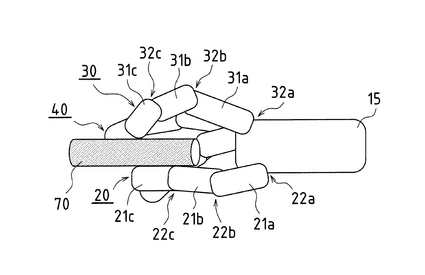
次に、上述したロボットハンドにより、例えばチョーク等の棒状の物体70を把持する場合の動作を説明する。
【0118】
まず、第2、第3指機構30,40の先端フレーム31c,41cと中間フレーム31b,41bとを連係させる連係状態にしたままで、物体70を掴ませるようにすると、図21に示すように、物体70の外周に先端フレーム31c,41cの先端縁が当接して、第2、第3指機構30,40の先端フレーム31c,41cの先端縁で摘んだような形態となり、把持状態が不安定になる。
【0119】
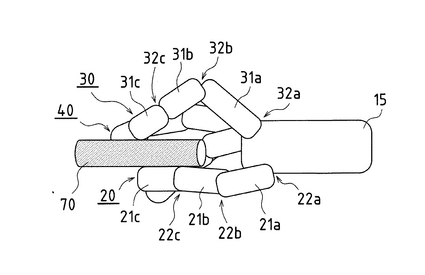
しかし、第2、第3指機構30,40の先端フレーム31c,41cと中間フレーム31b,41bとを連係させない連係解除状態にしておいて、物体70を掴ませるようにすれば、先端フレーム31c,41cが自由に傾動できるので、図22に示すように、指が開く方向にやや回転して先端フレーム31c,41cの側面が物体70に添った好ましい把持状態になる。この状態になると、再び連係を実行し指先部から把持力が発生するようになり、しっかりと物体70を把持することができる。
【0120】
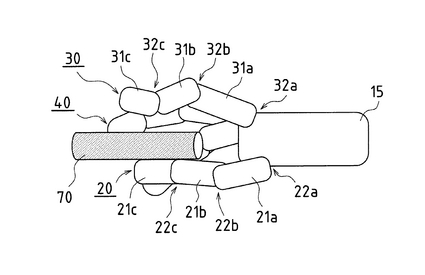
但し、第2、第3指機構30,40において、連係解除状態にすると、先端フレーム31c,41cが何れにも拘束されずに自由に回動するようになるので、例えば図23に示すように、適切な把持状態を作り出すことができなくなる場合がある。この点を考慮し、第2、第3指機構30,40においては、図10で示したバネ11を組み込むようにするのが好ましい。このバネ11を組み込めば、第2、第3指機構30,40の先端フレーム31c,41cが常時において手のひら側に傾動するよう弾発付勢されるので、ロボットハンド全体にしてみれば物体70を握りこむような形にできる。特に、連係解除状態において、先端フレーム31c,41cが物体70に接触すると、接触したままに保つことができるので、人の手の動きにより近づくようになる。
【0121】
なお、連係状態にしておいて物体70に先端フレーム31c,41cの先端縁を当接させてから、この当接した時点で、連係解除状態にするように制御してもよい。このように把持動作の途中で連係を解除し、その後再び連係状態に切り替えるという制御を行うには、連係解除状態と連係状態との切り替えタイミングが重要になる。
【0122】
そのためには、例えば先端フレーム31c,41cの先端角から側面にかけて力覚センサ(図示省略)を取り付け、この力覚センサの出力で、連係の解除、実行を制御すればよい。この場合には、図22に示す状態のときに力覚センサにて先端フレーム31c,41cにかかるせん断力や垂直力などを測定することで、先端フレーム31c,41cに無理な力が加わったとしたら連係を解除してやればよい。また予め連係を解除している場合には、物体70に接触したのを検出してそのタイミングで連係を実行させてやれば、物体70に把持力を加えてやることができる。
【0123】
ところで、上述したロボットハンドにおける各指機構20〜60の傾動動作ならびに第1、第2指機構20,30の旋回動作は、各関節にポテンショメータ等の角度センサ(図示省略)を搭載して、この角度センサで各回転部分の回転角度を検出し、その検出値に基づいて制御部(図示省略)により制御することができる。
【0124】
他の方法として、各関節に搭載している前記角度センサの値から判断する方法もある。仮に把持動作が決まっているのであれば、制御部(図示省略)によって予め設定された回転角で連係動作を解除し、次の設定された回転角で再び連係させるようにすればよい。更に連係の解除動作、連係動作を繰り返して最後に指機構を基のまっすぐな状態に戻すときは、連係状態にしている二つの関節の回転角を一致させなければならない。そのときは、各関節に搭載している前記角度センサの値を確認しながら、連係動作を実行するタイミングを決めてやればよい。
【0125】
上記のようにして制御部(図示省略)で先端フレーム31c,41cとそれに隣接する中間フレーム31b,41bの連係動作と連係解除動作とを選択的に行うようにすれば、多様なロボットハンドの把持状態を作ることができる。そのため連係動作の実行、連係の解除動作の実行を適宜制御することが多様なロボットハンドの把持状態を作るうえで重要になってくる。
【0126】
以上説明したロボットハンドでは、その第2指機構30および第3指機構40における先端フレーム31c,41cを中間フレーム31b,41bの傾動動作に連係して傾動させるように構成することにより、関節の数より駆動部としてのモーターの数を少なくしている。そのため、ロボットハンドの小型化ならびに低コスト化を図ることができる。
【0127】
しかも、このように駆動部としてのモーターの使用数を少なくしても、先端フレーム31c,41cを中間フレーム31b,41bと連係させる連係状態と連係させない連係解除状態とを切り替えることによって、ロボットハンドによる物体70の把持姿勢を比較的多様化できるようになる。
【0128】
また、第2、第3指機構30,40に備える第2動力伝達部7においては、第2駆動部5bから基端関節4aまでの動力伝達要素をワイヤー機構(7a〜7c)として、基端関節4aから中間関節4bまでの動力伝達要素をギア機構(7d〜7h)としている。このように第2動力伝達部7において第2、第3指機構30,40の外部に前記ワイヤー機構を配置した場合、第2駆動部5bの配置を自由にできるようになる。また、第2動力伝達部7において第2、第3指機構30,40の内部に前記ギア機構を配置した場合、当該ギア機構の施工性、メンテナンス性ならびに信頼性を向上できるようになる。もちろん、図示していないが、第2動力伝達部7において第2駆動部5bから基端関節4aまでの動力伝達要素をギア機構としてもよい。
【0129】
また、第2、第3指機構30,40に備える切り替え部8についても、中間関節4bから先端関節4cまでの動力伝達要素をギア機構(8a〜8d)にしているから、当該ギア機構の施工性、メンテナンス性ならびに信頼性を向上できるようになる。
【0130】
以下、上記ロボットハンドの他の実施形態を説明する。
【0131】
(1)上記実施形態において、第1指機構20、第4指機構50、第5指機構60における動力伝達部については、詳細に説明していないが、従来例と同様のワイヤー機構を用いることができるし、また、上記第2指機構30や第3指機構40における動力伝達部と同様のギヤ機構を用いることができる。
【0132】
(2)上記実施形態のロボットハンドでは、第2指機構30と第3指機構40とについて、先端フレーム31c,41cを中間フレーム31b,41bに連係させる連係状態と連係させない連係解除状態とを意図的に実現できるように構成した例を挙げたが、第1指機構20、第4指機構50、第5指機構60についても同様に構成することができ、どの箇所に適用するのかは、ロボットハンドの目的に応じて決めてやればよい。但し、上記実施形態のように、親指に相当する第1指機構20は、関節の数と同数の駆動部を用いた構成にしているので、人の手の親指と略同様に動かせるようになっており、ロボットハンドを多様に動かすうえでは有利である。
【0133】
(3)上記実施形態では、3つのフレームを有する指機構において、先端フレームと中間フレームとを連係状態と連係解除状態とに切り替えるようにしているが、3つ以上のフレームを3つ以上の関節で傾動可能に連結した構成であっても、本発明を適用できる。その場合、連係状態や連係解除状態とに切り替える対象となる2つのフレームとしては、先端フレームとそれに連結される中間フレームとなる。
【図面の簡単な説明】
【0134】
【図1】本発明に係る多関節機構の一実施形態を示す平面図である。
【図2】図1の多関節機構を一側(図では右側)から見た図である。
【図3】図1の多関節機構を他側(図では左側)から見た図である。
【図4】図2の基端フレームの動きを示す図である。
【図5】図2の中間フレームと先端フレームとの連係時の動きを示す図である。
【図6】図2の中間フレームと先端フレームとの連係解除時の動きを示す図である。
【図7】図5の状態において先端フレームの物体に対する当接状態を示す説明図である。
【図8】図6の状態において先端フレームの物体に対する当接状態を示す説明図である。
【図9】図1のストッパーの他の例で、図2に対応する図である。
【図10】本発明に係る多関節機構の他の実施形態で、図2に対応する図である。
【図11】本発明に係るロボットハンドの一実施形態を甲側から見た上面図である。
【図12】図11のロボットハンドを第1指機構側から見た図である。
【図13】図11のロボットハンドを第5指機構側から見た図である。
【図14】図11の第2指機構単体を示す側面図である。
【図15】図11の第3指機構単体を示す側面図である。
【図16】図14の第2指機構および図15の第3指機構を示す平面図である。
【図17】図16の第2、第3指機構を一側(図では右側)から見た図である。
【図18】図16の第2、第3指機構を他側(図では左側)から見た図である。
【図19】図18の第2、第3指機構における中間フレームと先端フレームとの連係時の動きを示す図である。
【図20】図18の第2、第3指機構における中間フレームと先端フレームとの連係解除時の動きを示す図である。
【図21】図11のロボットハンドによる物体の把持状態の好ましくない例を示す説明図である。
【図22】図11のロボットハンドによる物体の把持状態の好ましい例を示す説明図である。
【図23】図11のロボットハンドによる物体の把持状態の好ましくない他の例を示す説明図である。
【符号の説明】
【0135】
1 多関節機構
2 ベース
3a 基端フレーム
3b 中間フレーム
3c 先端フレーム
4a 基端関節
4b 中間関節
4c 先端関節
5a 第1駆動部
5b 第2駆動部
6 第1動力伝達部
6a 第1プーリ
6b 基端プーリ
6c 第1ワイヤー
7 第2動力伝達部
7a 第2プーリ
7b 基端空転プーリ
7c 第2ワイヤー
7d 基端空転ギア
7e 中間ギア
7f〜7h 基端中継ギア
8 切り替え部
8a 中間空転ギア
8b 先端ギア
8c,8d 中間中継ギア
9 ストッパー
10 物体
15 ベース
20 第1指機構
30 第2指機構
31a 基端フレーム
31b 中間フレーム
31c 先端フレーム
32a 基端関節
32b 中間関節
32c 先端関節
35a 第2指機構用の第5駆動部
35b 第2指機構用の第6駆動部
40 第3指機構
41a 基端フレーム
41b 中間フレーム
41c 先端フレーム
42a 基端関節
42b 中間関節
42c 先端関節
44a 第3指機構用の第8駆動部
44b 第3指機構用の第9駆動部
50 第4指機構
60 第5指機構
70 物体
【技術分野】
【0001】
本発明は、屈伸可能な多関節機構、ならびに物体を把持可能とするロボットハンドに関する。
【背景技術】
【0002】
一般的に、ロボットハンドにおいて、人の手に近似した多様な動きを実現して物体を操りやすくするには、多数の関節つまり自由度が必要である。このロボットハンドの指機構は、多数の関節を有し、モーター等の駆動部で発生する動力をワイヤーで各関節に伝達することで、屈伸可能にしている。前記駆動部は、関節の数と同数用いられており、これらの多数の駆動部は、例えば掌に相当する部分に搭載されている(特許文献1参照。)。
【0003】
この場合、関節の数と同数の駆動部を用いているために、ロボットハンドを小型化できない。しかし、単純に駆動部の数を減らすと自由度が少なくなり、多様な動きができなくなる。
【0004】
これに対し、駆動部の数を減らして小型化ならびに低コスト化を図るために、二つの関節を連係して駆動するようにしたものがある(特許文献2参照。)。例えば指機構において、指先の関節と、それに隣接する中間の関節とを連係して動作させるようにしている。このように二つの関節を連係動作させることで、駆動部の数を減らすことはできるが、指機構を細かく動かすことが難しくなる。そのため、ロボットハンドの把持状態を多様に作ることができなくなるので、複雑な形状の物体を把持しにくくなるとともに、物体を操りにくくなる。
【0005】
そこで、二つの関節の連係動作を必要に応じて解除させることができれば、多様なロボットハンドの把持状態を作ることができ、好ましい。上記特許文献2では、関節にある二つのプーリの間に摩擦クラッチを挿入し、連係動作を解除可能にしている。この構成では、指機構に負荷がなければ二つの関節が連係動作して回転するが、摩擦力を超える負荷が指機構にかかると、二つの関節を連係動作させないようになる。
【特許文献1】特開平6−8178号公報
【特許文献2】特開2003−89087号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
上記従来例では、まず、ワイヤー駆動方式であるので、組立時にワイヤーの引き回しが難しく、また、使用経過に伴いワイヤーが緩むおそれがあり、さらにワイヤーの耐久性が不十分であるといった不具合が懸念される。
【0007】
また、上記従来例では、摩擦クラッチを用いて二つの関節の連係動作を解除可能にしているが、この連係動作の解除は任意には行えないので、意図的に多様なロボットハンドの把持状態を作ることができない。しかも、大きな把持力が作用したとき、二つの関節の連係動作が勝手に解除されてしまうため、ロボットハンドの把持状態や条件が制限される等、複雑な形状の物体の把持ができなくなる。このように、従来例のロボットハンドでは、把持した物体を操る時に何らかの制限が加わるなど、より高度な把持動作を行うことができない。
【0008】
そこで、本発明は、上記従来の問題に鑑みてなされたものであり、耐久性および施工性に優れた多関節機構ならびにロボットハンドの提供を目的とする。また、本発明は、小型化および低コスト化を図ったうえで、多様な動きを可能にした多関節機構ならびにロボットハンドの提供を目的とする。
【課題を解決するための手段】
【0009】
本発明に係る多関節機構は、直列配置される複数のフレームと、各フレームをそれぞれ傾動可能に連結する複数の関節と、前記適宜のフレームを傾動させるための動力を発生する駆動部と、この駆動部で発生する動力を前記適宜の関節に伝達する動力伝達部とを備え、前記動力伝達部において前記各関節間での動力伝達要素をギアで構成していることを特徴としている。
【0010】
本発明の多関節機構は、要するに、多関節を有する装置全般に適用される。
【0011】
この場合、動力伝達部としてのギアが、従来例のワイヤーに比べて静的強度ならびに疲労強度に優れている等、耐久性が向上する。しかも、従来例のワイヤーに比べて組み立てやすくなるので、自動組立が可能になる。
【0012】
本発明に係る多関節機構は、直列配置される複数のフレームと、各フレームをそれぞれ傾動可能に連結する複数の関節と、前記複数のフレームのうちの基端フレームを傾動させるための動力を発生する第1駆動部と、前記複数のフレームのうちの中間フレームを駆動するための動力を発生する第2駆動部と、前記第1駆動部で発生する動力を前記基端フレームに伝達する第1動力伝達部と、前記第2駆動部で発生する動力を前記中間フレームに伝達する第2動力伝達部とを備え、前記第2動力伝達部において前記各関節間での動力伝達要素をギアで構成していることを特徴としている。
【0013】
この場合、先端フレームを直接的に駆動する駆動部を備えていないから、構成が簡素となり、小型化、コンパクト化を図るうえで有利となる。
【0014】
好ましくは、前記各関節のうち基端関節は、その両端がベースに固定されかつ前記基端フレームの一端に回動可能に支持される軸とされ、前記中間関節は、その両端が前記基端フレームの他端に固定されかつ前記中間フレームの一端に回動可能に貫通支持される軸とされ、前記先端関節は、その両端が前記中間フレームの他端に固定されかつ前記先端フレームの一端に回動可能に貫通支持される軸とされており、前記第2動力伝達部において前記各関節間での動力伝達要素は、基端関節としての軸に相対回動可能に支持される基端空転ギアと、前記中間フレームに固定されかつ中間関節としての軸に回動可能に支持される中間ギアと、前記基端空転ギアと中間ギアとの間に配置されて互いに噛合する一つまたは複数の基端中継ギアとを含む構成とされる。
【0015】
この場合、各関節の構成や、動力伝達部の構成を特定したものであり、上記同様、耐久性ならびに施工性の向上が可能になる。
【0016】
好ましくは、前記複数のフレームのうちの先端フレームを前記中間フレームの傾動動作に連係させる連係状態と、前記先端フレームを前記中間フレームに対し自由に傾動可能とする連係解除状態とを意図的に実現する切り替え部を備えた構成とされる。
【0017】
この場合、連係解除状態にすると、先端フレームが中間フレームに対し自由に傾動可能な状態になるから、この先端フレームを適宜の物体に当接させるときに、先端フレームの広範囲を前記物体に沿わせた状態で当接させることが可能になる。
【0018】
好ましくは、前記切り替え部は、中間関節としての軸で前記中間ギアと隣り合わせに回動可能に支持される中間空転ギアと、前記先端フレームに固定されかつ先端関節としての軸に回動可能に支持される先端ギアと、前記中間空転ギアと前記先端ギアとの間に配置されて互いに噛合する一つまたは複数の中間中継ギアと、この中間空転ギアを非回転に拘束して前記連係状態にしたりあるいは中間空転ギアの回転を許容して前記連係解除状態にしたりするストッパーとを含む構成とされる。
【0019】
この場合、切り替え部もギアで構成しているから、上記同様、耐久性ならびに施工性の向上が可能になる。
【0020】
好ましくは、前記ストッパーは、前記中間空転ギアの歯間に嵌入されて前記中間空転ギアを非回転に拘束する係止片と、この係止片を前記中間空転ギアの歯間に嵌入させるよう突出させたり前記中間空転ギアの歯間から抜くよう後退させたりする動作部とを含む構成とされる。
【0021】
この場合、ストッパーを係止片と動作部のみの簡単な構成にしているから、設備コストを抑制するうえで有利となる。
【0022】
好ましくは、前記動作部は、ソレノイドで構成することができる。好ましくは、前記動作部は、高分子アクチュエータで構成することができる。
【0023】
これらの場合、ストッパーの動作部を比較的小型でかつ安価なものとすることが可能になり、占有スペースおよび設備コストを抑制するうえで有利となる。
【0024】
好ましくは、前記先端フレームとそれに連結される中間フレームとに、当該先端フレームを前記中間フレームに対し一傾動方向に傾動させるよう弾発付勢するバネを設けることができる。
【0025】
この場合、連係解除状態において、先端フレームが中間フレームの傾動方向と反対向きに安易に動きにくくなり、また、先端フレームが物体に当接したときに、物体に当接した状態を保ちやすくなる。
【0026】
好ましくは、必要に応じて前記駆動部を駆動または非駆動にして前記各フレームの傾動動作を制御する制御部を有する構成とされる。
【0027】
好ましくは、前記各関節には、互いに連結するフレーム間の相対的な傾きを測定する角度センサを設けることができる。
【0028】
この場合、角度センサの出力に基づき各フレームの傾き角度を認識することが可能になる。
【0029】
好ましくは、前記制御部は、前記連係状態において前記各フレームを傾動させるとき、前記角度センサの出力に基づき前記各フレームの姿勢を認識し、要求される姿勢にする処理を実行するものとされる。
【0030】
この場合、各フレームの傾き角度の調整が比較的容易かつ高精度に行えるようになる。
【0031】
好ましくは、前記先端フレームには、力覚センサを設けることができる。この場合、力覚センサの出力に基づき先端フレームの物体に対する接触状態を認識することが可能になる。
【0032】
好ましくは、前記制御部は、前記連係状態において前記各フレームを傾動させている過程で前記先端フレームが物体に接触したときに前記力覚センサの出力に基づき前記切り替え部の駆動部によりストッパーを後退させて前記中間空転ギアを回転可能な連係解除状態にする処理を実行するものとされる。
【0033】
この場合、先端フレームを物体に任意の状態で当接させることが可能になり、多関節機構の動きを多様化できる。
【0034】
本発明に係るロボットハンドは、ベースと、このベースにそれぞれ片持ち梁状に支持されかつ突出方向複数箇所に関節を有する複数の指機構とを含むものであって、前記複数の指機構のうち少なくとも一つが、上述した多関節機構とされることを特徴としている。
【0035】
この場合、ロボットハンドの指機構の動きを多様化できるようになり、人の指の動きに近似した高度な動きが可能になる。
【0036】
ここでのロボットハンドは、適宜の物体を把持するような人の手(手首より先の部分)として利用されるが、その他、人の足(足首より先の部分)や、腕や足の構成と類似した機構を有するロボットとしても利用することが可能である。
【発明の効果】
【0037】
本発明によれば、耐久性および施工性に優れた多関節機構ならびにロボットハンドを提供することができる。また、本発明は、小型化および低コスト化を図ったうえで、多様な動きを可能にした多関節機構ならびにロボットハンドを提供することができる。
【発明を実施するための最良の形態】
【0038】
以下、本発明の実施形態を図面に基づいて説明する。
【0039】
〔多関節機構の説明〕
図1から図8を参照して、多関節機構1の最良の実施形態を説明する。この多関節機構1は、例えばロボットハンドの指機構等として利用される。
【0040】
多関節機構1は、図1から図3に示すように、直列に配置した三つのフレーム3a,3b,3cを三つの関節4a,4b,4cでそれぞれ傾動可能に連結した状態でベース2に片持ち梁状に支持されており、二つの駆動部5a,5bと2系統の動力伝達部6,7と切り替え部8とでもって、三つのフレーム3a〜3cを三つの関節4a〜4cを中心として傾動させるようになっている。
【0041】
以下、各部を詳細に説明する。
【0042】
ベース2には、基端フレーム3aの一端が基端関節4aを介して傾動可能に支持されており、この基端フレーム3aの他端には、中間フレーム3bの一端が中間関節4bを介して傾動可能に支持されており、この中間フレーム3bの他端には、先端フレーム3cが先端関節4cを介して傾動可能に支持されている。
【0043】
各関節4a〜4cは、隣り合うフレーム3a〜3cそれぞれを傾動可能に連結する軸とされている。詳しくは、基端関節4aは、両端がベース2に固定されかつ基端フレーム3aの一端に回動可能に貫通支持される軸とされている。中間関節4bは、両端が基端フレーム3aの他端に固定されかつ中間フレーム3bの一端に回動可能に貫通支持される軸とされている。先端関節4cは、両端が中間フレーム3bの他端に固定されかつ先端フレーム3cの一端に回動可能に貫通支持される軸とされている。
【0044】
第1、第2駆動部5a,5bは、いずれも、例えばモーター等からなり、ベース2に搭載されている。第1駆動部5aは、基端フレーム3aを傾動するための回転動力を発生するものであり、第2駆動部5bは、中間フレーム3bを傾動するための回転動力を発生するものである。
【0045】
第1動力伝達部6は、第1駆動部5aで発生する回転動力を基端関節4aに伝達するものである。この第1動力伝達部6は、図1および図2に示すように、第1駆動部5aの出力軸(符号省略)に固定される第1プーリ6aと、基端フレーム3aに固定されかつ基端関節4aとしての軸の一端側に回動可能に貫通支持される基端プーリ6bと、第1プーリ6aと基端プーリ6bとに跨って巻き掛けられる第1ワイヤー6cとで構成されている。
【0046】
第2動力伝達部7は、第2駆動部5bで発生する回転動力を中間関節4bに伝達するものである。この第2動力伝達部7は、図1から図3に示すように、第2駆動部5aの出力軸(符号省略)に固定される第2プーリ7aと、基端関節4aとしての軸の他端側で基端プーリ6bと隣り合わせに回動可能に貫通支持される基端空転プーリ7bと、第2プーリ7aと基端空転プーリ7bとに跨って巻き掛けられる第2ワイヤー7cと、基端空転プーリ7bと一体に形成される基端空転ギア7dと、中間フレーム3bに固定されかつ中間関節4bとしての軸の一端側に回動可能に貫通支持される中間ギア7eと、基端空転ギア7dと中間ギア7eとの間に配置されて互いに噛合する三つの基端中継ギア7f,7g,7hとで構成されている。
【0047】
なお、三つの基端中継ギア7f,7g,7hは、支軸(符号省略)を介して基端フレーム3aに回動可能に支持されている。この基端中継ギア7f,7g,7hの数は特に限定されないが、中間ギア7eを基端空転ギア7dと同一方向に回転させるには奇数とする必要がある。しかし、第2駆動部であるモーター5bを反転させれば済むことなので、中間ギア7eと基端空転ギア7dは同一方に回転させる必要はない。
【0048】
切り替え部8は、先端フレーム3cを中間フレーム3bの傾動動作に連係させて傾動させる連係状態と、先端フレーム3cを中間フレーム3bの傾動動作に連係させずに自由傾動可能とする連係解除状態とに切り替えるものである。
【0049】
この切り替え部8は、図1および図2に示すように、中間関節4bとしての軸の他端側で中間ギア7eと隣り合わせに回動可能に貫通支持される中間空転ギア8aと、先端フレーム3cに固定されかつ先端関節4cとしての軸の一端側に回動可能に貫通支持される先端ギア8bと、中間空転ギア8aと先端ギア8bとの間に配置されて互いに噛合する二つの中間中継ギア8c,8dと、中間空転ギア8aを非回転に拘束する状態と回転を許容する状態とに切り替えるストッパー9とで構成されている。
【0050】
なお、二つの中間中継ギア8c,8dは、支軸(符号省略)を介して中間フレーム3bに回動可能に支持されている。この中間中継ギア8c,8dの数は特に限定されないが、先端ギア8bを中間ギア7eと同一方向に回転させるには偶数とする必要がある。
【0051】
ところで、ストッパー9は、ソレノイドで構成されている。このソレノイドからなるストッパー9は、図2に示すように、円筒形の電磁石9aと、電磁石9aの中心に一端側が突出する状態でかつ非接触となる状態で挿入される可動鉄心9bと、可動鉄心9bの突出端側外周に巻回されるコイル9cと、可動鉄心9bの突出端に一直線上に連結された係止片9dとから構成されている。
【0052】
このストッパー9の動作としては、可動鉄心9bを突出させることによって係止片9dを中間空転ギア8aの歯間に嵌入させている場合に、中間空転ギア8aを非回転に拘束する状態にすることができ、また、可動鉄心9bを後退させることによって係止片9dを中間空転ギア8aの歯間から抜き出している場合に、中間空転ギア8aの回転を許容する状態とすることができる。
【0053】
このソレノイドからなるストッパー9は、電磁石9aへの通電時に可動鉄心9bを突出させて、非通電時に可動鉄心9bが後退している構成になっている。但し、ストッパー9は、非通電時に可動鉄心9bが突出した状態で保持される構成であってもよい。
【0054】
また、電磁石9aは、係止片9dを進退変位させるだけであってパワーの小さなもので十分であるから、ソレノイドからなるストッパー9を基端フレーム3aに収納配置でき、全体の小型化が可能になる。但し、ストッパー9はベース2側に配置してもよい。
【0055】
次に、動作を説明する。
【0056】
まず、第1駆動部5aを駆動すると、例えば第1ワイヤー6cを介して基端プーリ6bが図4の矢印X方向(反時計方向)に回転されるので、図4に示すように、この基端プーリ6bと一体の基端フレーム3aが基端プーリ6bと同方向(下向き)に傾動される。これにより、基端フレーム3aがベース2に対して所定角度θ1傾く。
【0057】
また、第2駆動部5bを第1駆動部5aと同様に駆動すると、例えば第2ワイヤー7cを介して基端空転プーリ7bが回転されるとともに、基端空転プーリ7bと一体回転する基端空転ギア7dによって三つの基端中継ギア7f,7g,7hを介して中間ギア7eが基端空転ギア7dと同方向に回転されるので、この中間ギア7eと一体の中間フレーム3bが中間ギア7eと同方向(下向き)に傾動される。これにより、図5に示すように、中間フレーム3bが基端フレーム3aに対して所定角度θ2傾く。
【0058】
このとき、ストッパー9の係止片9dを中間空転ギア8aの歯間に嵌入させて、中間空転ギア8aを非回転に拘束している場合、図5に示すように、中間フレーム3bの傾動動作によって非回転の中間空転ギア8aと噛合する二つの基端中継ギア8c,8dが自転しながら中間空転ギア8aの外周を中間フレーム3bの傾動方向と同方向に公転されるので、先端ギア8bが中間フレーム3bの傾動方向と同方向に回転され、この先端ギア8bと一体の先端フレーム3cが中間フレーム3bの傾動方向と同方向(下向き)に傾動される。これにより、先端フレーム3cが中間フレーム3bに対して所定角度θ3傾く。
【0059】
つまり、中間空転ギア8aを非回転に拘束すると、第2駆動部5bで発生する動力を中間関節4bを介して先端関節4cに伝達することができるので、先端フレーム3cを中間フレーム3bの傾動動作に連係して傾動させる連係状態にできる。
【0060】
一方、ストッパー9の係止片9dを中間空転ギア8aの歯間から抜き出して、中間空転ギア8aを自由回転可能にしている場合、図6に示すように、中間フレーム3bが傾動しても中間空転ギア8aと噛合する基端中継ギア8c,8dが自転されなくなるので、先端ギア8bと一体の先端フレーム3cは傾動されなくなる。但し、先端ギア8bは何れにも拘束されていないので、先端ギア8bと一体の先端フレーム3cは先端関節4cを支点として上下いずれの方向にも傾動可能になっている。なお、図6の状態では、先端フレーム3cが自重により中間フレーム3bに対し下向きに所定角度θ4傾くことになる。
【0061】
つまり、中間空転ギア8aを自由回転可能にすると、第2駆動部5bで発生する動力を基端フレーム3aから中間フレーム3bまで伝達するものの、中間フレーム3bから先端フレーム3cへの伝達を遮断することができるので、先端フレーム3cを中間フレーム3bの傾動動作に連係させない自由傾動可能な連係解除状態にできる。
【0062】
このような多関節機構1において、棒状の物体10に対する先端フレーム3cの当接状態を説明する。
【0063】
まず、切り替え部8を連係状態にしている場合、棒状の物体10に先端フレーム3cを当接させようとすると、例えば図7に示すように、中間フレーム3bおよび先端フレーム3cが連係してそれぞれ傾動するために、棒状の物体10の外周面に対して先端フレーム3cの先端縁が当接することになる。
【0064】
しかし、切り替え部8を連係状態にしておいて、中間フレーム3bを基端フレーム3aに対し所定角度傾動させた後で、切り替え部8を連係解除状態にすると、中間フレーム3bに対し先端フレーム3cが自由に傾動可能になるので、棒状の物体10の外周面に先端フレーム3cの先端角が当接しても、この先端フレーム3cが中間フレーム3bの傾動方向と反対向き(図の上向き)に動くことになって、図8に示すように、先端フレーム3cの側面が棒状の物体10の外周面に沿って当接するようになる。このように先端フレーム3cの側面部分の広範囲が棒状の物体10の外周面に当接する。この時点で、再度、切り替え部8を連係状態にすれば、前記当接状態を維持できるようになる。
【0065】
以上説明した多関節機構1によれば、次のような効果が得られる。
【0066】
まず、第2動力伝達部7において、基端関節4aから中間関節4bまでの動力伝達要素をギア機構(7b〜7h)で行うようにしているとともに、中間関節4bから先端関節4cまでの動力伝達要素をギア機構(8a〜8d)で行うようにしているから、従来例のワイヤーを用いる場合に比べて静的強度ならびに疲労強度に優れている等、耐久性が向上するとともに、従来例のワイヤーを用いる場合に比べて組み立てやすくなるので、自動組立が可能になる等、施工性が向上する。
【0067】
また、駆動部の数を関節の数より少なくしているので、小型化ならびに低コスト化を図ることができる。このように駆動部の数を関節の数より少なくしても、すべてのフレーム3a〜3cをそれぞれ独立して傾動させることが可能になるので、多様な動きを可能にすることができる。
【0068】
以下、本発明の多関節機構1の他の実施形態について説明する。
【0069】
(1)上記ストッパー9は、長さを電気的に可変制御できる高分子アクチュエータ9eで構成することができる。この場合、例えば図9に示すように、ストッパー9としての高分子アクチュエータ9eの先端に係止片9dを連結する。この高分子アクチュエータ9eでは、その長さを長くして係止片9dを中間空転ギア8aの歯間に嵌入させると、中間フレーム3bと先端フレーム3cとを連係させて動かすことができる。一方、高分子アクチュエータ9eの長さを短くして係止片9dを中間空転ギア8aの歯間から抜き出すと、中間フレーム3bと先端フレーム3cとの連係動作を解除できる。なお、係止片9dを後退させる力は小さくてよく、また係止片9dの変位ストロークも中間空転ギア8aの歯の高さ程度と短くてよいので、高分子アクチュエータ9eに要求される仕様は厳しくならずに済む。しかも、高分子アクチュエータ9eは、上述したソレノイドよりも軽量、小型であるので、基端フレーム3a内部に収納配置しやすくなり、好ましい。
【0070】
(2)上記実施形態において、中間フレーム3bと先端フレーム3cとの連係解除状態では、先端フレーム3cが自由に回動できるので、例えば図10に示すように、中間フレーム3bと先端フレーム3cとに跨って、先端フレーム3cを中間フレーム3bに対し下向きに弾性的に傾かせるためのバネ11を組み込むようにしてもよい。図10において、バネ11は、一点鎖線で示している。
【0071】
この場合、連結解除状態において、バネ11の弾性復元力によって先端フレーム3cが自由に回転せずに一方向に傾くようになるので、先端フレーム3cを当接対象となる物体10に当接させた状態において、先端フレーム3cが物体10から離れることが防止される。
【0072】
このようなバネ11の弾性復元力であるが、多関節機構1の使用対象に応じて適宜設定すればよい。仮に、バネ11の弾性復元力を大きくすると、連係解除状態において物体10に対する接触圧が強くなりすぎて好ましくない場合が生ずる。そこで、バネ11の弾性復元力を、例えば関節のロストルク以下に設定すれば、大きな外力が作用しない限り、先端フレーム3cが勝手に一方向に傾動することはない。どれくらいのバネ定数を設定するかは多関節機構1の使用対象に応じて適宜決定すればよい。但し、図示していないが、先端フレーム3cの先端ギア8bを、ストッパーなどで完全に止めることも可能であるが、連係解除状態では、先端フレーム3cを、ある程度自由に回動可能とするほうが好ましい。
【0073】
(3)上記実施形態において、第1動力伝達部6のワイヤー機構(6a〜6c)および第2動力伝達部7のワイヤー機構(7a〜7c)を、図示していないが、ギア機構とすることができる。
【0074】
(4)上記実施形態では、3つのフレームを3つの関節で傾動可能に連結した構成の多関節機構1を例に挙げているが、3つ以上のフレームを3つ以上の関節で傾動可能に連結した構成であっても、本発明を適用できる。その場合、連係状態や連係解除状態とに切り替える対象となる2つのフレームとしては、先端フレームとそれに連結される中間フレームが望ましい。しかしこれに限定されるわけではなく、多関節機構の中間部にある2つのフレームを連携状態や、連係解除状態とに切り替える対象としてもよい。これは、多関節機構の用途によって決めてやればよい。
【0075】
〔ロボットハンドの説明〕
図11から図23を参照して、本発明に係るロボットハンドの実施形態を説明する。ここでのロボットハンドは、人の手に対応した形状にした例を挙げている。
【0076】
ロボットハンドは、手のひらに相当するベース15に、例えば五本の指機構20,30,40,50,60をそれぞれ片持ち梁状に支持させた構成である。
【0077】
第1〜第5指機構20〜60は、以下で詳細に説明するように、それぞれ、駆動部(本実施の形態ではモーター)および動力伝達部を介して適宜多様な動きができるようになっている。
【0078】
この実施形態のロボットハンドでは、第2指機構30および第3指機構40に、上記多関節機構1と同様の構成を適用している。
【0079】
まず、第1指機構20、第4指機構50ならびに第5指機構60を説明してから、第2指機構30および第3指機構40を説明する。
【0080】
〔第1指機構20〕
第1指機構20は、図11から図13に示すように、親指に相当するものであり、直列に配置した三つのフレーム21a,21b,21cを三つの関節22a,22b,22cでそれぞれ傾動可能に連結した構成である。
【0081】
三つのフレーム21a,21b,21cのうち、基端フレーム21aは、第1アングル23に基端関節22aを介して傾動可能に支持されている。この第1アングル23は、付け根関節としての回転軸24を介してベース15に支持されている。回転軸24の中心軸線は、各関節22a〜22cの中心軸線と略直交している。
【0082】
この第1指機構20は、三つのフレーム21a,21b,21cが第1、第2、第3駆動部25a,25b,25cで個別に傾動され、第1指機構20全体が第4駆動部25dで回転軸24周りに旋回されるようになっており、計四つの自由度を有している。
【0083】
第1〜第3駆動部25a〜25cは、第1アングル23に搭載されており、詳細に図示していないが、3系統の動力伝達部を介して三つのフレーム21a〜21cを三つの関節22a〜22cを支点としてそれぞれ個別に傾動させる。
【0084】
第4駆動部25dは、ベース15に搭載されており、直動―回転変換部26を介して第1アングル23を回転軸24を支点として回転させる。直動―回転変換部26は、ベース15上に回転可能に支持されるスクリュー28aと、スクリュー28aに螺合されるナット28bと、ナット28bに一体化されかつ回転軸24に固定された揺動アーム28cと、第4駆動部25dの出力軸(符号省略)に固定され駆動ギア27aと、スクリュー28aの一端に固定されかつ駆動ギア27aに噛合される従動ギア27aとを有している。スクリュー28aおよびナット28bは、送りねじ機構を構成している。
【0085】
この第1指機構20の動作を説明する。
【0086】
(a)第1駆動部25aを駆動すると、基端関節22aを支点として、基端フレーム21a、中間フレーム21bおよび先端フレーム21cの全体が一体的に傾動する。
【0087】
(b)第2駆動部25bを駆動すると、中間関節22bを支点として、中間フレーム21bおよび先端フレーム21cが一体的に傾動する。
【0088】
(c)第3駆動部25cを駆動すると、先端関節22cの中心を支点として、指先フレーム21cのみが傾動する。
【0089】
(d)第4駆動部25dを駆動すると、駆動ギア27aおよび従動ギア27bを介してスクリュー28aが回転される。このスクリュー28aの回転に伴いナット28bがスクリュー28aに沿って直線的に往復移動し、このナット28bと一体の揺動アーム28cが一方向に所定角度回転するので、第1指機構20全体が回転軸24を中心に旋回する。第1指機構20の旋回方向は、スクリュー28aの回転方向を変換することでコントロールできる。
【0090】
〔第4指機構50および第5指機構60〕
図11から図13に示すように、第4指機構50は、薬指に相当するものであり、直列に配置した三つのフレーム51a,51b,51cを三つの関節52a,52b,52cでそれぞれ傾動可能に連結した構成である。第5指機構60は、小指に相当するものであり、直列に配置した三つのフレーム61a,61b,61cを三つの関節62a,62b,62cでそれぞれ傾動可能に連結した構成である。
【0091】
第4指機構50および第5指機構60は、図11および図13に示すように、回転軸63によって連結されている。この回転軸63を第10駆動部64の動力で回転させることによって第4指機構50および第5指機構60を連係して屈伸させる。第10駆動部64はアングル65に搭載されている。第10駆動部64と回転軸63とは例えばギア機構(図示省略)によって連結されているが、このギア機構の詳細な構成は省略する。
【0092】
この第4指機構50および第5指機構60の動作を説明する。第10駆動部64を駆動すると、第5指機構60が基端関節62aを支点として、基端フレーム61a、中間フレーム61bおよび先端フレーム61cの全体が傾動する。このとき、基端フレーム61aの傾動動作に連係して中間フレーム61bが傾動し、この中間フレーム61bの傾動動作に連係して先端フレーム61cが傾動するようになっている。なお、第4指機構50は第5指機構60と連結されているので、第5指機構60と同じ動きをする。このように、第4、第5指機構50,60は、合わせて一つの自由度を有している。
【0093】
〔第2指機構30〕
図11および図14に示すように、第2指機構30は、人差し指に相当するものであり、直列に配置した三つのフレーム31a,31b,31cを三つの関節32a,32b,32cでそれぞれ傾動可能に連結した構成である。
【0094】
三つのフレーム31a〜31cのうち、基端フレーム31aは、第2アングル33に基端関節32aを介して傾動可能に支持されている。この第2アングル33は、付け根関節としての回転軸34を介してベース15に支持されている。回転軸34の中心軸線は、各関節32a〜32cの中心軸線と略直交している。
【0095】
この第2指機構30は、三つのフレーム31a〜31cが第5、第6駆動部35a,35bで傾動され、第2機構30全体が第7駆動部35cで付け根関節としての回転軸34周りに旋回されるようになっている。
【0096】
第5、第6駆動部35a,35bは、第2アングル33に搭載されており、図16から図18に示すように、第1、第2動力伝達部6,7を介して、基端フレーム31aと中間フレーム31bとを基端関節32aと中間関節32bとを支点としてそれぞれ個別に傾動させるようになっている。そして、先端フレーム31cは、図17に示すように、切り替え部8によって、中間フレーム31bと連係して駆動する連係状態と連係しない連係解除状態とに切り替えられるようになっている。
【0097】
第7駆動部35cは、図11に示すように、ベース15に搭載されており、直動―回転変換部36を介して第2アングル33を付け根関節としての回転軸34を支点として旋回させる。
【0098】
直動―回転変換部36は、第7駆動部35cの出力軸(符号省略)に固定されるスクリュー37aと、スクリュー37aに螺合されるナット37bと、ナット37bに一体化されかつ回転軸34に固定された揺動アーム37cとを有している。
【0099】
スクリュー37aおよびナット37bが送りねじ機構を構成している。スクリュー37aは、ベース15上に回転可能に支持されている。
【0100】
直動―回転変換部36の動作としては、第7駆動部35cを駆動すると、直動―回転変換部36のスクリュー37aが回転される。このスクリュー37aの回転に伴いナット37bがスクリュー37aに沿って直線的に往復移動し、このナット37bと一体の揺動アーム37cが一方向に所定角度回転するので、第2指機構30全体が回転軸34を中心に旋回する。第2指機構30の旋回方向は、スクリュー37aの回転方向を変換することでコントロールできる。
【0101】
〔第3指機構40〕
図11および図20に示すように、第3指機構40は、中指に相当するものであり、直列に配置した三つのフレーム41a,41b,41cを三つの関節42a,42b,42cでそれぞれ傾動可能に連結した構成である。
【0102】
三つのフレーム41a〜41cのうち、基端フレーム41aは、第3アングル43に基端関節42aを介して傾動可能に支持されている。この第3アングル43は、ベース15に固定されており、この第3アングル43には、三つのフレーム41a〜41cを傾動させるための第8、第9駆動部44a,44bが搭載されている。
【0103】
この第3指機構40は、三つのフレーム41a〜41cが第8、第9駆動部44a,44bで傾動されるようになっている。
【0104】
そして、上記第2指機構30および第3指機構40には、それぞれ、図1から図10に示した多関節機構1における第1、第2動力伝達部6,7および切り替え部8と同一の機構を備えているので、以下で簡単に説明する。
【0105】
第1動力伝達部6は、第5駆動部35a(第8駆動部44a)で発生する回転動力を基端関節32a(42a)に伝達するものである。この第1動力伝達部6は、図16および図17に示すように、第5駆動部35a(第8駆動部44a)の出力軸(符号省略)に固定される第1プーリ6aと、基端フレーム31a(41a)に固定されかつ基端関節32a(42a)としての軸の一端側に回動可能に貫通支持される基端プーリ6bと、第1プーリ6aと基端プーリ6bとに跨って巻き掛けられる第1ワイヤー6cとで構成されている。
【0106】
第2動力伝達部7は、第6駆動部35b(第9駆動部44b)で発生する回転動力を中間関節32b(42b)に伝達するものである。この第2動力伝達部7は、図16から図18に示すように、第6駆動部35b(第9駆動部44b)の出力軸(符号省略)に固定される第2プーリ7aと、基端関節32a(42a)としての軸の他端側で基端プーリ6bと隣り合わせに回動可能に貫通支持される基端空転プーリ7bと、第2プーリ7aと基端空転プーリ7bとに跨って巻き掛けられる第2ワイヤー7cと、基端空転プーリ7bと一体に形成される基端空転ギア7dと、中間フレーム31b(41b)に固定されかつ中間関節32b(42b)としての軸の一端側に回動可能に貫通支持される中間ギア7eと、基端空転ギア7dと中間ギア7eとの間に配置されて互いに噛合する三つの基端中継ギア7f,7g,7hとで構成されている。なお、三つの基端中継ギア7f,7g,7hは、支軸(符号省略)を介して基端フレーム31a(41a)に回動可能に支持されている。
【0107】
切り替え部8は、先端フレーム31c(41c)を中間フレーム31b(41b)の傾動動作に連係させて傾動させる連係状態と、先端フレーム31c(41c)を中間フレーム31b(41b)の傾動動作に連係させずに自由傾動可能とする連係解除状態とに切り替えるものである。
【0108】
この切り替え部8は、図16および図17に示すように、中間関節32b(42b)としての軸の他端側で中間ギア7eと隣り合わせに回動可能に貫通支持される中間空転ギア8aと、先端フレーム31c(41c)に固定されかつ先端関節32c(42c)としての軸の一端側に回動可能に貫通支持される先端ギア8bと、中間空転ギア8aと先端ギア8bとの間に配置されて互いに噛合する二つの中間中継ギア8c,8dと、中間空転ギア8aを非回転に拘束する状態と回転を許容する状態とに切り替えるストッパー9とで構成されている。なお、二つの中間中継ギア8c,8dは、支軸(符号省略)を介して中間フレーム31b(41b)に回動可能に支持されている。
【0109】
なお、ストッパー9は、ソレノイドで構成されている。このソレノイドからなるストッパー9は、円筒形の電磁石9aと、電磁石9aの中心に一端側が突出する状態でかつ非接触となる状態で挿入される可動鉄心9bと、可動鉄心9bの突出端側外周に巻回されるコイル9cと、可動鉄心9bの突出端に一直線上に連結された係止片9dとから構成されている。
【0110】
次に、上記第2指機構30および第3指機構40の動作を説明する。
【0111】
まず、第5駆動部35a(第8駆動部44a)を駆動すると、基端関節32a(基端関節42a)を支点として、基端フレーム31a(基端フレーム41a)、中間フレーム31b(中間フレーム41b)および先端フレーム31c(先端フレーム41c)の全体が一体的に傾動する。
【0112】
また、第6駆動部35b(第9駆動部44b)を駆動すると、中間関節32b(中間関節42b)を支点として、中間フレーム31b(中間フレーム41b)および先端フレーム31c(先端フレーム41c)が一体的に傾動する。
【0113】
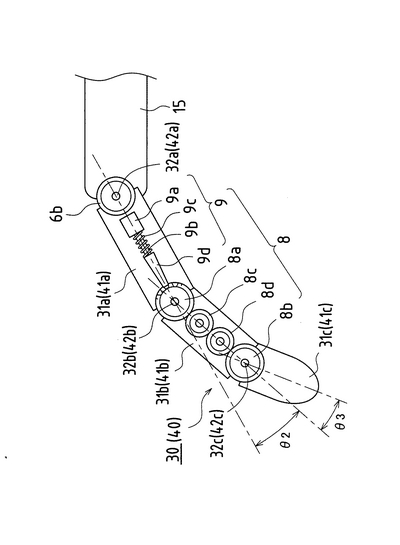
このとき、切り替え部8によって、ストッパー9の係止片9dを中間空転ギア8aの歯間に嵌入させて、中間空転ギア8aを非回転に拘束している場合、図19に示すように、中間フレーム31b(中間フレーム41b)が所定角度θ2傾くと、その傾動動作によって非回転の中間空転ギア8aと噛合する二つの基端中継ギア8c,8dが自転しながら中間空転ギア8aの外周を中間フレーム31b(中間フレーム41b)の傾動方向と同方向に公転されるので、先端ギア8bが中間フレーム31b(中間フレーム41b)の傾動方向と同方向に回転され、この先端ギア8bと一体の先端フレーム31c(先端フレーム41c)が中間フレーム31b(中間フレーム41b)の傾動方向と同方向(下向き)に傾動される。これにより、先端フレーム31c(先端フレーム41c)が中間フレーム31b(中間フレーム41b)に対して所定角度θ3傾く。
【0114】
つまり、中間空転ギア8aを非回転に拘束すると、第2駆動部5bで発生する動力を中間関節4bを介して先端関節4cに伝達することができるので、先端フレーム31c(先端フレーム41c)を中間フレーム31b(中間フレーム41b)に連係して傾動動作させる連係状態にできる。
【0115】
一方、ストッパー9の係止片9dを中間空転ギア8aの歯間から抜き出して、中間空転ギア8aを自由回転可能にしている場合、図20に示すように、中間フレーム31b(中間フレーム41b)が所定角度θ2傾いても、中間空転ギア8aと噛合する基端中継ギア8c,8dが自転されなくなるので、先端ギア8bと一体の先端フレーム31c(先端フレーム41c)は傾動されなくなる。但し、先端ギア8bは何れにも拘束されていないので、先端ギア8bと一体の先端フレーム31c(先端フレーム41c)は先端関節4cを支点として上下いずれの方向にも傾動可能になっている。なお、図20の状態では、先端フレーム31c(先端フレーム41c)が自重により中間フレーム31b(中間フレーム41b)に対し下向きに所定角度θ4傾くことになる。
【0116】
つまり、中間空転ギア8aを自由回転可能にすると、第2駆動部5bで発生する動力を基端フレーム31a(基端フレーム41a)から中間フレーム31b(中間フレーム41b)まで伝達するものの、中間フレーム31b(中間フレーム41b)から先端フレーム31c(先端フレーム41c)への伝達を遮断することができるので、先端フレーム31c(先端フレーム41c)を中間フレーム31b(中間フレーム41b)に連係して傾動動作させない自由傾動可能な連係解除状態にできる。
【0117】
次に、上述したロボットハンドにより、例えばチョーク等の棒状の物体70を把持する場合の動作を説明する。
【0118】
まず、第2、第3指機構30,40の先端フレーム31c,41cと中間フレーム31b,41bとを連係させる連係状態にしたままで、物体70を掴ませるようにすると、図21に示すように、物体70の外周に先端フレーム31c,41cの先端縁が当接して、第2、第3指機構30,40の先端フレーム31c,41cの先端縁で摘んだような形態となり、把持状態が不安定になる。
【0119】
しかし、第2、第3指機構30,40の先端フレーム31c,41cと中間フレーム31b,41bとを連係させない連係解除状態にしておいて、物体70を掴ませるようにすれば、先端フレーム31c,41cが自由に傾動できるので、図22に示すように、指が開く方向にやや回転して先端フレーム31c,41cの側面が物体70に添った好ましい把持状態になる。この状態になると、再び連係を実行し指先部から把持力が発生するようになり、しっかりと物体70を把持することができる。
【0120】
但し、第2、第3指機構30,40において、連係解除状態にすると、先端フレーム31c,41cが何れにも拘束されずに自由に回動するようになるので、例えば図23に示すように、適切な把持状態を作り出すことができなくなる場合がある。この点を考慮し、第2、第3指機構30,40においては、図10で示したバネ11を組み込むようにするのが好ましい。このバネ11を組み込めば、第2、第3指機構30,40の先端フレーム31c,41cが常時において手のひら側に傾動するよう弾発付勢されるので、ロボットハンド全体にしてみれば物体70を握りこむような形にできる。特に、連係解除状態において、先端フレーム31c,41cが物体70に接触すると、接触したままに保つことができるので、人の手の動きにより近づくようになる。
【0121】
なお、連係状態にしておいて物体70に先端フレーム31c,41cの先端縁を当接させてから、この当接した時点で、連係解除状態にするように制御してもよい。このように把持動作の途中で連係を解除し、その後再び連係状態に切り替えるという制御を行うには、連係解除状態と連係状態との切り替えタイミングが重要になる。
【0122】
そのためには、例えば先端フレーム31c,41cの先端角から側面にかけて力覚センサ(図示省略)を取り付け、この力覚センサの出力で、連係の解除、実行を制御すればよい。この場合には、図22に示す状態のときに力覚センサにて先端フレーム31c,41cにかかるせん断力や垂直力などを測定することで、先端フレーム31c,41cに無理な力が加わったとしたら連係を解除してやればよい。また予め連係を解除している場合には、物体70に接触したのを検出してそのタイミングで連係を実行させてやれば、物体70に把持力を加えてやることができる。
【0123】
ところで、上述したロボットハンドにおける各指機構20〜60の傾動動作ならびに第1、第2指機構20,30の旋回動作は、各関節にポテンショメータ等の角度センサ(図示省略)を搭載して、この角度センサで各回転部分の回転角度を検出し、その検出値に基づいて制御部(図示省略)により制御することができる。
【0124】
他の方法として、各関節に搭載している前記角度センサの値から判断する方法もある。仮に把持動作が決まっているのであれば、制御部(図示省略)によって予め設定された回転角で連係動作を解除し、次の設定された回転角で再び連係させるようにすればよい。更に連係の解除動作、連係動作を繰り返して最後に指機構を基のまっすぐな状態に戻すときは、連係状態にしている二つの関節の回転角を一致させなければならない。そのときは、各関節に搭載している前記角度センサの値を確認しながら、連係動作を実行するタイミングを決めてやればよい。
【0125】
上記のようにして制御部(図示省略)で先端フレーム31c,41cとそれに隣接する中間フレーム31b,41bの連係動作と連係解除動作とを選択的に行うようにすれば、多様なロボットハンドの把持状態を作ることができる。そのため連係動作の実行、連係の解除動作の実行を適宜制御することが多様なロボットハンドの把持状態を作るうえで重要になってくる。
【0126】
以上説明したロボットハンドでは、その第2指機構30および第3指機構40における先端フレーム31c,41cを中間フレーム31b,41bの傾動動作に連係して傾動させるように構成することにより、関節の数より駆動部としてのモーターの数を少なくしている。そのため、ロボットハンドの小型化ならびに低コスト化を図ることができる。
【0127】
しかも、このように駆動部としてのモーターの使用数を少なくしても、先端フレーム31c,41cを中間フレーム31b,41bと連係させる連係状態と連係させない連係解除状態とを切り替えることによって、ロボットハンドによる物体70の把持姿勢を比較的多様化できるようになる。
【0128】
また、第2、第3指機構30,40に備える第2動力伝達部7においては、第2駆動部5bから基端関節4aまでの動力伝達要素をワイヤー機構(7a〜7c)として、基端関節4aから中間関節4bまでの動力伝達要素をギア機構(7d〜7h)としている。このように第2動力伝達部7において第2、第3指機構30,40の外部に前記ワイヤー機構を配置した場合、第2駆動部5bの配置を自由にできるようになる。また、第2動力伝達部7において第2、第3指機構30,40の内部に前記ギア機構を配置した場合、当該ギア機構の施工性、メンテナンス性ならびに信頼性を向上できるようになる。もちろん、図示していないが、第2動力伝達部7において第2駆動部5bから基端関節4aまでの動力伝達要素をギア機構としてもよい。
【0129】
また、第2、第3指機構30,40に備える切り替え部8についても、中間関節4bから先端関節4cまでの動力伝達要素をギア機構(8a〜8d)にしているから、当該ギア機構の施工性、メンテナンス性ならびに信頼性を向上できるようになる。
【0130】
以下、上記ロボットハンドの他の実施形態を説明する。
【0131】
(1)上記実施形態において、第1指機構20、第4指機構50、第5指機構60における動力伝達部については、詳細に説明していないが、従来例と同様のワイヤー機構を用いることができるし、また、上記第2指機構30や第3指機構40における動力伝達部と同様のギヤ機構を用いることができる。
【0132】
(2)上記実施形態のロボットハンドでは、第2指機構30と第3指機構40とについて、先端フレーム31c,41cを中間フレーム31b,41bに連係させる連係状態と連係させない連係解除状態とを意図的に実現できるように構成した例を挙げたが、第1指機構20、第4指機構50、第5指機構60についても同様に構成することができ、どの箇所に適用するのかは、ロボットハンドの目的に応じて決めてやればよい。但し、上記実施形態のように、親指に相当する第1指機構20は、関節の数と同数の駆動部を用いた構成にしているので、人の手の親指と略同様に動かせるようになっており、ロボットハンドを多様に動かすうえでは有利である。
【0133】
(3)上記実施形態では、3つのフレームを有する指機構において、先端フレームと中間フレームとを連係状態と連係解除状態とに切り替えるようにしているが、3つ以上のフレームを3つ以上の関節で傾動可能に連結した構成であっても、本発明を適用できる。その場合、連係状態や連係解除状態とに切り替える対象となる2つのフレームとしては、先端フレームとそれに連結される中間フレームとなる。
【図面の簡単な説明】
【0134】
【図1】本発明に係る多関節機構の一実施形態を示す平面図である。
【図2】図1の多関節機構を一側(図では右側)から見た図である。
【図3】図1の多関節機構を他側(図では左側)から見た図である。
【図4】図2の基端フレームの動きを示す図である。
【図5】図2の中間フレームと先端フレームとの連係時の動きを示す図である。
【図6】図2の中間フレームと先端フレームとの連係解除時の動きを示す図である。
【図7】図5の状態において先端フレームの物体に対する当接状態を示す説明図である。
【図8】図6の状態において先端フレームの物体に対する当接状態を示す説明図である。
【図9】図1のストッパーの他の例で、図2に対応する図である。
【図10】本発明に係る多関節機構の他の実施形態で、図2に対応する図である。
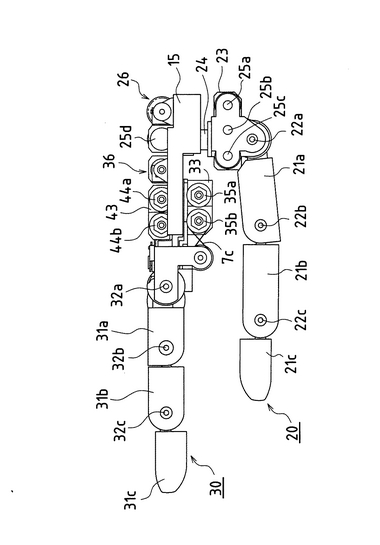
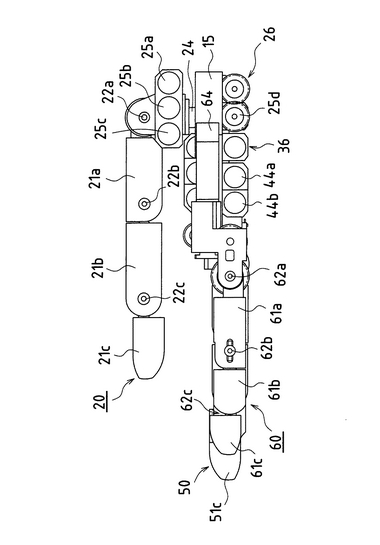
【図11】本発明に係るロボットハンドの一実施形態を甲側から見た上面図である。
【図12】図11のロボットハンドを第1指機構側から見た図である。
【図13】図11のロボットハンドを第5指機構側から見た図である。
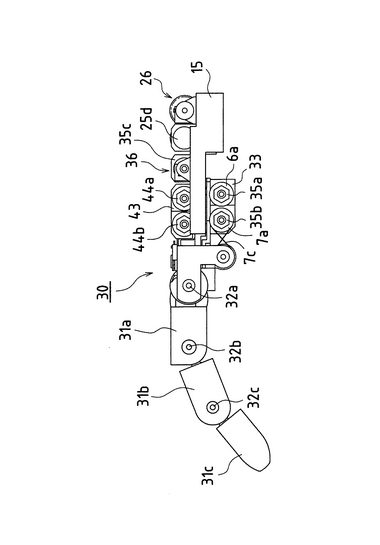
【図14】図11の第2指機構単体を示す側面図である。
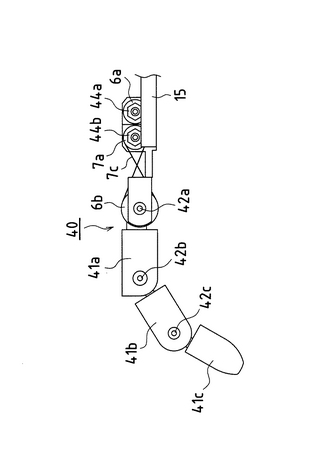
【図15】図11の第3指機構単体を示す側面図である。
【図16】図14の第2指機構および図15の第3指機構を示す平面図である。
【図17】図16の第2、第3指機構を一側(図では右側)から見た図である。
【図18】図16の第2、第3指機構を他側(図では左側)から見た図である。
【図19】図18の第2、第3指機構における中間フレームと先端フレームとの連係時の動きを示す図である。
【図20】図18の第2、第3指機構における中間フレームと先端フレームとの連係解除時の動きを示す図である。
【図21】図11のロボットハンドによる物体の把持状態の好ましくない例を示す説明図である。
【図22】図11のロボットハンドによる物体の把持状態の好ましい例を示す説明図である。
【図23】図11のロボットハンドによる物体の把持状態の好ましくない他の例を示す説明図である。
【符号の説明】
【0135】
1 多関節機構
2 ベース
3a 基端フレーム
3b 中間フレーム
3c 先端フレーム
4a 基端関節
4b 中間関節
4c 先端関節
5a 第1駆動部
5b 第2駆動部
6 第1動力伝達部
6a 第1プーリ
6b 基端プーリ
6c 第1ワイヤー
7 第2動力伝達部
7a 第2プーリ
7b 基端空転プーリ
7c 第2ワイヤー
7d 基端空転ギア
7e 中間ギア
7f〜7h 基端中継ギア
8 切り替え部
8a 中間空転ギア
8b 先端ギア
8c,8d 中間中継ギア
9 ストッパー
10 物体
15 ベース
20 第1指機構
30 第2指機構
31a 基端フレーム
31b 中間フレーム
31c 先端フレーム
32a 基端関節
32b 中間関節
32c 先端関節
35a 第2指機構用の第5駆動部
35b 第2指機構用の第6駆動部
40 第3指機構
41a 基端フレーム
41b 中間フレーム
41c 先端フレーム
42a 基端関節
42b 中間関節
42c 先端関節
44a 第3指機構用の第8駆動部
44b 第3指機構用の第9駆動部
50 第4指機構
60 第5指機構
70 物体
【特許請求の範囲】
【請求項1】
直列配置される複数のフレームと、各フレームをそれぞれ傾動可能に連結する複数の関節と、前記適宜のフレームを傾動させるための動力を発生する駆動部と、この駆動部で発生する動力を前記適宜の関節に伝達する動力伝達部とを備え、
前記動力伝達部において前記各関節間での動力伝達要素をギアで構成していることを特徴とする多関節機構。
【請求項2】
直列配置される複数のフレームと、
各フレームをそれぞれ傾動可能に連結する複数の関節と、
前記複数のフレームのうちの基端フレームを傾動させるための動力を発生する第1駆動部と、
前記複数のフレームのうちの中間フレームを駆動するための動力を発生する第2駆動部と、
前記第1駆動部で発生する動力を前記基端フレームに伝達する第1動力伝達部と、
前記第2駆動部で発生する動力を前記中間フレームに伝達する第2動力伝達部とを備え、
前記第2動力伝達部において前記各関節間での動力伝達要素をギアで構成していることを特徴とする多関節機構。
【請求項3】
請求項2に記載の多関節機構において、
前記各関節のうち基端関節は、その両端がベースに固定されかつ前記基端フレームの一端に回動可能に支持される軸とされ、前記中間関節は、その両端が前記基端フレームの他端に固定されかつ前記中間フレームの一端に回動可能に貫通支持される軸とされ、前記先端関節は、その両端が前記中間フレームの他端に固定されかつ前記先端フレームの一端に回動可能に貫通支持される軸とされており、
前記第2動力伝達部において前記各関節間での動力伝達要素は、基端関節としての軸に相対回動可能に支持される基端空転ギアと、前記中間フレームに固定されかつ中間関節としての軸に回動可能に支持される中間ギアと、前記基端空転ギアと中間ギアとの間に配置されて互いに噛合する一つまたは複数の基端中継ギアとを含む構成とされていることを特徴とする多関節機構。
【請求項4】
請求項2または3に記載の多関節機構において、
前記複数のフレームのうちの先端フレームを前記中間フレームの傾動動作に連係させる連係状態と、前記先端フレームを前記中間フレームに対し自由に傾動可能とする連係解除状態とを意図的に実現する切り替え部を備えていることを特徴とする多関節機構。
【請求項5】
請求項4に記載の多関節機構において、
前記切り替え部は、中間関節としての軸で前記中間ギアと隣り合わせに回動可能に支持される中間空転ギアと、前記先端フレームに固定されかつ先端関節としての軸に回動可能に支持される先端ギアと、前記中間空転ギアと前記先端ギアとの間に配置されて互いに噛合する一つまたは複数の中間中継ギアと、この中間空転ギアを非回転に拘束して前記連係状態にしたりあるいは中間空転ギアの回転を許容して前記連係解除状態にしたりするストッパーとを含む構成とされていることを特徴とする多関節機構。
【請求項6】
請求項5に記載の多関節機構において、
前記ストッパーは、前記中間空転ギアの歯間に嵌入されて前記中間空転ギアを非回転に拘束する係止片と、この係止片を前記中間空転ギアの歯間に嵌入させるよう突出させたり前記中間空転ギアの歯間から抜くよう後退させたりする動作部とを含む構成とされていることを特徴とする多関節機構。
【請求項7】
請求項6に記載の多関節機構において、
前記動作部は、ソレノイドで構成されていることを特徴とする多関節機構。
【請求項8】
請求項6に記載の多関節機構において、
前記動作部は、高分子アクチュエータで構成されていることを特徴とする多関節機構。
【請求項9】
請求項4から8のいずれかに記載の多関節機構において、
前記先端フレームとそれに連結される中間フレームとに、当該先端フレームを前記中間フレームに対し一傾動方向に傾動させるよう弾発付勢するバネが設けられていることを特徴とする多関節機構。
【請求項10】
請求項1から9のいずれかに記載の多関節機構において、
必要に応じて前記駆動部を駆動または非駆動にして前記各フレームの傾動動作を制御する制御部を有することを特徴とする多関節機構。
【請求項11】
請求項1から10のいずれかに記載の多関節機構において、
前記各関節には、互いに連結するフレーム間の相対的な傾きを測定する角度センサが設けられていることを特徴とする多関節機構。
【請求項12】
請求項11に記載の多関節機構において、
前記制御部は、前記連係状態において前記各フレームを傾動させるとき、前記角度センサの出力に基づき前記各フレームの姿勢を認識し、要求される姿勢にする処理を実行することを特徴とする多関節機構。
【請求項13】
請求項1から12のいずれかに記載の多関節機構において、
前記先端フレームには、力覚センサが設けられていることを特徴とする多関節機構。
【請求項14】
請求項13に記載の多関節機構において、
前記制御部は、前記連係状態において前記各フレームを傾動させている過程で前記先端フレームが物体に接触したときに前記力覚センサの出力に基づき前記切り替え部の駆動部によりストッパーを後退させて前記中間空転ギアを回転可能な連係解除状態にする処理を実行することを特徴とする多関節機構。
【請求項15】
ベースと、このベースにそれぞれ片持ち梁状に支持されかつ突出方向複数箇所に関節を有する複数の指機構とを含むロボットハンドにおいて、
前記複数の指機構のうち少なくとも一つが、上記請求項1から14のいずれかに記載の多関節機構とされていることを特徴とするロボットハンド。
【請求項1】
直列配置される複数のフレームと、各フレームをそれぞれ傾動可能に連結する複数の関節と、前記適宜のフレームを傾動させるための動力を発生する駆動部と、この駆動部で発生する動力を前記適宜の関節に伝達する動力伝達部とを備え、
前記動力伝達部において前記各関節間での動力伝達要素をギアで構成していることを特徴とする多関節機構。
【請求項2】
直列配置される複数のフレームと、
各フレームをそれぞれ傾動可能に連結する複数の関節と、
前記複数のフレームのうちの基端フレームを傾動させるための動力を発生する第1駆動部と、
前記複数のフレームのうちの中間フレームを駆動するための動力を発生する第2駆動部と、
前記第1駆動部で発生する動力を前記基端フレームに伝達する第1動力伝達部と、
前記第2駆動部で発生する動力を前記中間フレームに伝達する第2動力伝達部とを備え、
前記第2動力伝達部において前記各関節間での動力伝達要素をギアで構成していることを特徴とする多関節機構。
【請求項3】
請求項2に記載の多関節機構において、
前記各関節のうち基端関節は、その両端がベースに固定されかつ前記基端フレームの一端に回動可能に支持される軸とされ、前記中間関節は、その両端が前記基端フレームの他端に固定されかつ前記中間フレームの一端に回動可能に貫通支持される軸とされ、前記先端関節は、その両端が前記中間フレームの他端に固定されかつ前記先端フレームの一端に回動可能に貫通支持される軸とされており、
前記第2動力伝達部において前記各関節間での動力伝達要素は、基端関節としての軸に相対回動可能に支持される基端空転ギアと、前記中間フレームに固定されかつ中間関節としての軸に回動可能に支持される中間ギアと、前記基端空転ギアと中間ギアとの間に配置されて互いに噛合する一つまたは複数の基端中継ギアとを含む構成とされていることを特徴とする多関節機構。
【請求項4】
請求項2または3に記載の多関節機構において、
前記複数のフレームのうちの先端フレームを前記中間フレームの傾動動作に連係させる連係状態と、前記先端フレームを前記中間フレームに対し自由に傾動可能とする連係解除状態とを意図的に実現する切り替え部を備えていることを特徴とする多関節機構。
【請求項5】
請求項4に記載の多関節機構において、
前記切り替え部は、中間関節としての軸で前記中間ギアと隣り合わせに回動可能に支持される中間空転ギアと、前記先端フレームに固定されかつ先端関節としての軸に回動可能に支持される先端ギアと、前記中間空転ギアと前記先端ギアとの間に配置されて互いに噛合する一つまたは複数の中間中継ギアと、この中間空転ギアを非回転に拘束して前記連係状態にしたりあるいは中間空転ギアの回転を許容して前記連係解除状態にしたりするストッパーとを含む構成とされていることを特徴とする多関節機構。
【請求項6】
請求項5に記載の多関節機構において、
前記ストッパーは、前記中間空転ギアの歯間に嵌入されて前記中間空転ギアを非回転に拘束する係止片と、この係止片を前記中間空転ギアの歯間に嵌入させるよう突出させたり前記中間空転ギアの歯間から抜くよう後退させたりする動作部とを含む構成とされていることを特徴とする多関節機構。
【請求項7】
請求項6に記載の多関節機構において、
前記動作部は、ソレノイドで構成されていることを特徴とする多関節機構。
【請求項8】
請求項6に記載の多関節機構において、
前記動作部は、高分子アクチュエータで構成されていることを特徴とする多関節機構。
【請求項9】
請求項4から8のいずれかに記載の多関節機構において、
前記先端フレームとそれに連結される中間フレームとに、当該先端フレームを前記中間フレームに対し一傾動方向に傾動させるよう弾発付勢するバネが設けられていることを特徴とする多関節機構。
【請求項10】
請求項1から9のいずれかに記載の多関節機構において、
必要に応じて前記駆動部を駆動または非駆動にして前記各フレームの傾動動作を制御する制御部を有することを特徴とする多関節機構。
【請求項11】
請求項1から10のいずれかに記載の多関節機構において、
前記各関節には、互いに連結するフレーム間の相対的な傾きを測定する角度センサが設けられていることを特徴とする多関節機構。
【請求項12】
請求項11に記載の多関節機構において、
前記制御部は、前記連係状態において前記各フレームを傾動させるとき、前記角度センサの出力に基づき前記各フレームの姿勢を認識し、要求される姿勢にする処理を実行することを特徴とする多関節機構。
【請求項13】
請求項1から12のいずれかに記載の多関節機構において、
前記先端フレームには、力覚センサが設けられていることを特徴とする多関節機構。
【請求項14】
請求項13に記載の多関節機構において、
前記制御部は、前記連係状態において前記各フレームを傾動させている過程で前記先端フレームが物体に接触したときに前記力覚センサの出力に基づき前記切り替え部の駆動部によりストッパーを後退させて前記中間空転ギアを回転可能な連係解除状態にする処理を実行することを特徴とする多関節機構。
【請求項15】
ベースと、このベースにそれぞれ片持ち梁状に支持されかつ突出方向複数箇所に関節を有する複数の指機構とを含むロボットハンドにおいて、
前記複数の指機構のうち少なくとも一つが、上記請求項1から14のいずれかに記載の多関節機構とされていることを特徴とするロボットハンド。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【公開番号】特開2006−116667(P2006−116667A)
【公開日】平成18年5月11日(2006.5.11)
【国際特許分類】
【出願番号】特願2004−308518(P2004−308518)
【出願日】平成16年10月22日(2004.10.22)
【出願人】(000005049)シャープ株式会社 (33,933)
【Fターム(参考)】
【公開日】平成18年5月11日(2006.5.11)
【国際特許分類】
【出願日】平成16年10月22日(2004.10.22)
【出願人】(000005049)シャープ株式会社 (33,933)
【Fターム(参考)】
[ Back to top ]