
大きい皮膚領域のケアを形成するケアセッションを断続的に実行するための装置
本発明は、複数領域の皮膚科ケアプロセスを案内する装置に関する。前記装置は、皮膚科ケア器具が各々皮膚領域の複数の皮膚サブ領域の1つで複数の皮膚科ケアセッションを断続的に実行する間、前記皮膚領域上の前記皮膚科ケア器具の駆動を支持するキャリアと、前記皮膚科ケア器具の駆動中に前記複数の皮膚サブ領域のうちの第1サブ領域から前記複数の皮膚サブ領域のうちの第2サブ領域への前記キャリアの移動を調整する制動ユニットとを備えることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、その一部の実施形態では、大きい皮膚領域の治療の方法およびシステムに関し、さらに詳しくは、しかし排他的にではなく、美容および/または診断治療のような、大きい皮膚領域の治療のための装置および/またはプロセスを案内および/または制御する方法およびシステムに関する。
【背景技術】
【0002】
大きい皮膚領域の治療、検査、および/または診断プロセスの有効性、安全性、予測性および/または認容性を改善するために、方法論的走査パターンを採用しなければならない。そのようなパターンは、大きい皮膚領域の各部分に費やされる時間を略均等に分割し、治療セッションの重複を回避し、かつ/または平均治療セッションのタイムスパンを短縮することを可能にする。
【0003】
大きい皮膚領域の検査および/または診断プロセスの例として、ダーモスコープ検査、皮膚がん検査、および/または任意の他の皮膚科診断プロセスがある。大きい皮膚領域の治療の例として、RF源または光および超音波のような電磁波に基づく治療、例えば挫瘡治療、脱毛治療、日焼け治療、乾癬治療、皮膚引締め治療、色素性病変の治療、刺青、および/またはいずれかの他の組織の治療がある。
【0004】
最近の数年間に、様々な方法およびシステムが開発されてきた。例えば2003年2月4日に出願された米国特許第7282047号明細書は、治療エネルギを生成するように適応されかつ取付け構造に結合された少なくとも1つの治療エネルギ源と、取付け構造に接続されかつ取付け構造およびそれに結合されたエネルギ源を治療エネルギに曝露させようとする領域上で移動させるように適応された少なくとも1つの移動ユニットとを含む、治療エネルギ源を治療対象領域上で移動させるための装置を記載している。
【0005】
別の例は、レーザからのレーザ照射パルスを治療対象の皮膚の領域に送達するためのハンドピースを含むレーザ皮膚治療装置を記載した、1999年10月8日に出願された米国特許第6758845号明細書に記載されている。治療対象領域は、レーザの1回の発射で治療可能な領域より大きい。大きい領域は、大きい領域内の隣接サブ領域をレーザの繰返し発射によって治療することによって治療される。レーザは、大きい領域内のハンドピースの位置に応じて自動的に発射される。ハンドピースの位置を決定するための幾つかの装置が開示されている。これらは、治療対照の皮膚に描かれた印のハンドピースによる光学的検出、ハンドピース用の別個のガイド上またはハンドピースに取り付けられたローラ上の印の光学的、磁気的、または機械的検出、およびハンドピース内のトランスポンダから固定基準面への信号の移動時間を決定することによる検出を含む。
【発明の概要】
【0006】
本発明の一部の実施形態では、複数の皮膚領域における皮膚科ケアプロセスを案内する装置を提供する。該装置は、皮膚科ケア器具が各々皮膚領域の複数の皮膚サブ領域の1つで複数の皮膚科ケアセッションを断続的に実行する間、皮膚領域上の皮膚科ケア器具の駆動を支持するキャリアと、駆動中に複数の皮膚サブ領域のうちの第1サブ領域から複数の皮膚サブ領域のうちの第2サブ領域へのキャリアの移動を調整する制動ユニットとを備える。
【0007】
任意選択的に、皮膚科ケア器具は、ハンドヘルドエピスコープ、画像センサ、カメラ、ビデオカメラ、触覚治療器具、電磁エネルギ(EM)トランスミッタ、そのようなEMパルスの導管、超音波トランスミッタ、超短パルス光(IPL)脱毛器、およびレーザ器具から成る群から選択される。
【0008】
さらに任意選択的に、皮膚科ケア器具は、前記群のいずれかの構成員のヘッドおよびハンドピースの少なくとも1つである。
【0009】
任意選択的に、駆動は人間オペレータによって手動で起動され、制動ユニットは駆動への抵抗を変化させることによって移動を調整する。
【0010】
任意選択的に、キャリアは、複数の異なる皮膚科ケア器具を着脱自在にかつ交代で支持するための大きさおよび形状に作られる。
【0011】
任意選択的に、該装置は、各皮膚科ケアセッションの開始および終了の少なくとも1つを検出する検出器をさらに備え、制動ユニットは検出に従って移動を調整する。
【0012】
さらに任意選択的に、皮膚科ケア器具は、少なくとも1つの光パルスを放射することによって各皮膚科ケアセッションを実行し、検出器は、少なくとも1つのパルスを検出することによって、各皮膚科ケアセッションの開始および終了の少なくとも1つを検出する光検出器である。
【0013】
任意選択的に、皮膚領域は、肢体の皮膚領域の少なくとも60%、腹部の皮膚領域の少なくとも60%、背中の皮膚領域の少なくとも60%から成る群の構成員である。
【0014】
任意選択的に、制動ユニットは、キャリアに動作可能に接続されかつ移動中に回転するように適応された少なくとも1つの車輪と、移動中に少なくとも1つの車輪の回転自由を抑制する少なくとも1つの車輪制動器とを含む。
【0015】
任意選択的に、該装置は、キャリアが皮膚領域上を移動した距離を示す移動追跡器をさらに備える。制動ユニットは距離に応じて移動を調整する。
【0016】
さらに任意選択的に、少なくとも1つの車輪制動器は、車輪に接続された少なくとも1つの車輪板と可動板とを含み、少なくとも1つの車輪制動器は、移動中に可動板を動かして少なくとも1つの車輪板と衝突させることによって、回転自由を抑制する。
【0017】
さらに任意選択的に、少なくとも1つの車輪制動器は、車輪のリムの内側に接続された少なくとも1つの車輪板と、車輪のシャフトに接続された可動要素とを含み、少なくとも1つの車輪制動器は、移動中に可動要素を動かして少なくとも1つの車輪板と衝突させることによって、回転自由を抑制する。
【0018】
さらに任意選択的に、少なくとも1つの車輪制動器は、車輪に接続された少なくとも1つの車輪板と、キャリアに接続されたフレーム板とを含み、板は、移動中に相互に衝突しかつ板の少なくとも1つを屈曲させるように配置され、屈曲は移動を制約する。
【0019】
さらに任意選択的に、少なくとも1つの車輪制動器は、例えば凹部から張り出すばねによって線形的に作動する少なくとも1つの球状要素を含む。そのような方法で、球状要素は、車輪の移動中に車輪上のバーと衝突して装置の移動を抑制するように断続的に配置される。
【0020】
任意選択的に、該装置は、オペレータが手動で移動を実行するようにキャリアを駆動させることを可能にするハンドルをさらに備える。
【0021】
任意選択的に、該装置は、移動中にオペレータの腕を装置に対して固定する手固定要素をさらに備える。
【0022】
任意選択的に、該装置は、複数の皮膚科ケアセッションのパターンを学習するための学習モジュールをさらに備え、制動ユニットはパターンに応じて調整を実行する。
【0023】
任意選択的に、皮膚科ケア器具は画像センサおよび閃光装置を含み、制動ユニットは、皮膚科ケア器具が複数の皮膚サブ領域の1つの上にあるときに閃光装置が閃光するように、移動を調整する。
【0024】
任意選択的に、該装置は、閃光を検出する光検出器をさらに備え、制動ユニットは検出に応じて移動を調整する。
【0025】
任意選択的に、キャリアは皮膚科ケア器具の構成要素を含む筐体である。
【0026】
任意選択的に、移動は2次元で実行される。
【0027】
任意選択的に、該装置は、皮膚科ケア器具をキャリアに把持するための帯掛け機構をさらに備える。
【0028】
任意選択的に、帯掛け機構は柔軟層を有するセグメント化ブレスレットを含み、セグメント化ブレスレットが器具を把持したときに柔軟層は圧縮される。
【0029】
任意選択的に、キャリアは皮膚領域と接触する。
【0030】
本発明の一部の実施形態では、皮膚科ケアプロセスを案内する方法を提供する。該方法は、制動ユニットを有するキャリア内に皮膚科ケア器具を装着するステップと、皮膚領域上での皮膚科ケア器具の駆動を支持するためにキャリアを使用しながら、複数の皮膚科ケアセッションを各々、皮膚領域の複数の皮膚サブ領域の1つで断続的に実行するステップと、複数の皮膚サブ領域の1つから別の1つへの皮膚領域上のキャリアの移動を自動的に調整するように制動ユニットを操作するステップとを含む。
【0031】
任意選択的に、駆動は人間オペレータによって手動で起動され、操作は駆動に対する抵抗を変化させることを含む。
【0032】
任意選択的に、皮膚領域は、患者の肢体、腹部、および背中から成る群の構成員の少なくとも60%に及ぶ。
【0033】
さらに任意選択的に、該方法は、各ケアセッションで皮膚の複数のサブ領域の1つの画像を取得するステップをさらに含む。
【0034】
さらに任意選択的に、該方法は、各ケアセッションで複数の皮膚サブ領域の異なるサブ領域に電磁(EM)パルスを放出するステップをさらに含む。
【0035】
任意選択的に、EMパルスは、パルス・レーザ・ビーム、赤外光パルス、超音波パルスから成る群から選択される。
【0036】
さらに任意選択的に、該方法は、各ケアセッションで複数の皮膚サブ領域の異なるサブ領域に触覚刺激を加えるステップをさらに含む。
【0037】
さらに任意選択的に、該方法は、移動中に各皮膚科ケアセッションの開始および終了の少なくとも1つを検出するステップをさらに含み、操作は検出に応じて実行される。
【0038】
任意選択的に、調整は、移動中にキャリアが移動した距離に応じて実行される。
【0039】
さらに任意選択的に、該方法は、複数の皮膚科ケアセッションのレートを学習するステップと、レートに応じて制動ユニットを操作するステップとをさらに含む。
【0040】
本発明の一部の実施形態では、皮膚科ケアプロセスを案内する方法を提供する。該方法は、患者の皮膚領域上で皮膚科ケア器具の駆動を支持するステップと、皮膚科ケア器具によって断続的に放出される複数の電磁パルスを少なくとも1つの光検出器によって自動的に検出するステップと、複数の電磁パルスに応じて制動ユニットを操作して駆動を調整するステップとを含む。
【0041】
任意選択的に、光検出器は皮膚科ケア器具に外付けされる。
【0042】
さらに任意選択的に、該方法は、駆動中に皮膚領域の複数のサブ領域の複数の画像を取得するステップと、複数の画像を診断のために出力するステップとをさらに含む。
【0043】
さらに任意選択的に、該方法は、駆動前に皮膚領域の初期位置に印を付けるステップと、各画像が実質的に同一サブ領域のそれぞれの追加画像を有するように複数の追加画像を取得するべく、該方法に対応する方法で追加駆動を実行するために初期位置を使用するステップとをさらに含む。
【0044】
さらに任意選択的に、該方法は、後期に皮膚領域上での皮膚科ケア器具の第2駆動を支持するステップと、皮膚科ケア器具によって断続的に放射される複数の追加電磁パルスを少なくとも1つの光検出器によって自動的に検出するステップと、複数の追加電磁パルスに応じて制動ユニットを操作して駆動を調整し、追加駆動中に複数のサブ領域の複数の追加画像を取得し、複数の画像および複数の追加画像を同時に提示するステップとをさらに含む。
【0045】
任意選択的に、制動ユニットは皮膚科ケア器具に外付けされる。
【0046】
本発明の一部の実施形態では、複数の皮膚領域における皮膚科ケアプロセスを案内する方法を提供する。該方法は、皮膚科ケア器具が複数の皮膚科ケアセッションを実行している間、患者の皮膚領域上で皮膚科ケア器具の駆動を支持するステップと、駆動中に皮膚科ケア器具が移動する距離を自動的に推定するステップと、距離に応じて駆動を調整するように制動ユニットを操作するステップとを含む。
【0047】
別途定義されない限り、本明細書で使用されるすべての技術的用語および/または科学的用語は、本発明が属する技術分野の当業者によって一般に理解されるのと同じ意味を有する。本明細書に記載される方法および材料と類似または同等である方法および材料を本発明の実施または試験において使用することができるが、例示的な方法および/または材料が下記に記載される。矛盾する場合には、定義を含めて、本特許明細書が優先する。加えて、材料、方法および実施例は例示にすぎず、限定であることは意図されない。
【0048】
本発明の実施形態の方法および/またはシステムを実行することは、選択されたタスクを、手動操作で、自動的にまたはそれらを組み合わせて実行または完了することを含んでいる。さらに、本発明の装置、方法および/またはシステムの実施形態の実際の機器や装置によって、いくつもの選択されたステップを、ハードウェア、ソフトウェア、またはファームウェア、あるいはオペレーティングシステムを用いるそれらの組合せによって実行できる。
【0049】
例えば、本発明の実施形態による選択されたタスクを実行するためのハードウェアは、チップまたは回路として実施されることができる。ソフトウェアとして、本発明の実施形態により選択されたタスクは、コンピュータが適切なオペレーティングシステムを使って実行する複数のソフトウェアの命令のようなソフトウェアとして実施されることができる。本発明の例示的な実施形態において、本明細書に記載される方法および/またはシステムの例示的な実施形態による1つ以上のタスクは、データプロセッサ、例えば複数の命令を実行する計算プラットフォームで実行される。任意選択的に、データプロセッサは、命令および/またはデータを格納するための揮発性メモリ、および/または、命令および/またはデータを格納するための不揮発性記憶装置(例えば、磁気ハードディスク、および/または取り外し可能な記録媒体)を含む。任意選択的に、ネットワーク接続もさらに提供される。ディスプレイおよび/またはユーザ入力装置(例えば、キーボードまたはマウス)も、任意選択的にさらに提供される。
【図面の簡単な説明】
【0050】
本明細書では本発明のいくつかの実施形態を単に例示し添付の図面を参照して説明する。特に詳細に図面を参照して、示されている詳細が例示として本発明の実施形態を例示考察することだけを目的としていることを強調するものである。この点について、図面について行う説明によって、本発明の実施形態を実施する方法は当業者には明らかになるであろう。
【0051】
【図1】図1は、本発明の一部の実施形態に係る、大きい皮膚領域を検査、診断、および/または治療するために複数領域の皮膚科ケアプロセスを実行する皮膚科ケア器具を案内する装置の略図である。
【0052】
【図2A−2B】図2Aは、本発明の一部の実施形態に係る、複数領域の皮膚科ケアプロセスを案内する方法のフローチャートである。図2Bは、本発明の一部の実施形態に係る、複数領域の皮膚科ケアプロセスを実行するために皮膚科ケア器具を支持するキャリアを案内する方法のフローチャートである。
【0053】
【図3A】図3Aは、本発明の一部の実施形態に係る、オペレータが手動で操縦するように、例えば押動するように、設計された装置の略図である。
【0054】
【図3B】図3Bは、本発明の一部の実施形態に係る、図3Aに示した装置を使用して皮膚科ケア器具を手動で滑走させるオペレータの略図である。
【0055】
【図4A−4C】図4Aは、本発明の一部の実施形態に係る、光検出器に接続された制動ユニットの略図である。図4Bは、本発明の一部の実施形態に係る、光検出器に接続された制動ユニットの略図である。図4Cは、本発明の一部の実施形態に係る、光検出器に接続された制動ユニットの略図である。
【0056】
【図5】図5は、本発明の一部の実施形態に係る、光検出器によって検出される繰返しの照射と同期した車輪制動ユニットの板の繰返しの解放を示すグラフである。
【0057】
【図6】図6は、本発明の一部の実施形態に係る、パルス光が放射されたときに板の解放を可能にする回路の略図である。
【0058】
【図7】図7は、本発明の一部の実施形態に係る、大きい皮膚領域に沿った装置の断続的前進を示す略図である。
【0059】
【図8】図8は、本発明の一部の実施形態に係る、パルス・レーザ・ビームのような光ビームの監視された放射に応じて複数領域の皮膚科ケアプロセスを案内するための例示的装置の略図である。
【0060】
【図9】図9は、本発明の一部の実施形態に係る、装置に対してオペレータの手を固定する帯掛け機構に物理的に接続されたキャリア付き装置の略図である。
【0061】
【図10A−10B】図10Aは、本発明の一部の実施形態に係る、屈曲角度θを有する回転延長体を持つ例示的車輪の略図である。図10Bは、本発明の一部の実施形態に係る、図10Aに例示した屈曲角度に応答して車輪に加えられる抵抗を示す例示的グラフである。
【0062】
【図11A−11B】図11Aは、本発明の一部の実施形態に係る、皮膚科ケア器具の移動を調整するために、板の代わりにボールが使用される制動ユニットの略図である。図11Bは、本発明の一部の実施形態に係る、例示的車輪および例示的制動ユニットの例示的シャフトの略図である。
【0063】
【図12】図12は、本発明の一部の実施形態に係る、車輪が完全に1回転するごとに複数回、フレーム延長体と衝突するように複数の延長体が車輪に取り付けられた制動ユニットの略図である。
【0064】
【図13】図13は、本発明の一部の実施形態に係る、湿った皮膚またはすべすべした皮膚上の皮膚科ケア器具の移動を調整するための、歯付き車輪を有する制動ユニットの略図である。
【0065】
【図14】図14は、本発明の一部の実施形態に係る制動ユニットを示す略図である。
【0066】
【図15A−15B】図15Aは、本発明の一部の実施形態に係る、源の二次元の移動を調整するように適応された装置の略図である。図15Bは、本発明の一部の実施形態に係る、源の二次元の移動を調整するように適応された装置の略図である。
【0067】
【図16】図16は、本発明の一部の実施形態に係る、色素性病変を診断するための装置の略図である。
【0068】
【図17A−17B】図17Aは、本発明の一部の実施形態に係る、胴体および図16に示す装置によって順次撮像される1組の近接皮膚サブ領域の略図である。図17Bは、本発明の一部の実施形態に係る、胴体および図17Aとは異なる期間に図16に示す装置によって順次撮像される1組の近接皮膚サブ領域の略図である。
【0069】
【図18】図18は、本発明の一部の実施形態に係る、種々の皮膚科ケア器具を固定するための帯掛け機構の略図である。
【0070】
【図19】図19は、本発明の一部の実施形態に係る、すべすべした湿った皮膚のみならず乾燥した皮膚上でも様々な皮膚科ケア器具を案内するように適応された、多種多様な大きさおよび形状の着脱自在の断続的前進ローラを交換するための機構を持つ装置の略図である。
【発明を実施するための形態】
【0071】
本発明は、その一部の実施形態では、大きい皮膚領域の治療の方法およびシステムに関し、さらに詳しくは、しかし排他的にではなく、美容および/または診断治療のような、大きい皮膚領域の治療のための装置および/またはプロセスを案内および/または制御する方法およびシステムに関する。
【0072】
本発明の一部の実施形態では、肢体、背中、および腹部のような大きい皮膚領域で実行される複数領域の皮膚科ケアプロセスを、大きい皮膚領域上の皮膚科ケア器具の駆動を調整するために制動ユニットを使用することによって、案内するための方法および装置を提供する。皮膚科ケア器具は、脱毛システムまたは任意の他の皮膚科ケアシステムの一般的なハンドピース、および/または診断用の色素性病変の画像を取得するために使用されるカメラとすることができる。皮膚科ケア器具は、手動で例えば皮膚科ケア器具を保持する人間オペレータによって駆動するか、あるいは自動的に例えばロボットアームによって駆動することができる。
【0073】
該装置は、皮膚科ケア器具が複数の皮膚科ケアセッションを各々、皮膚領域のサブ領域の1つで断続的に実行する間、皮膚領域上の皮膚科ケア器具の手動または自動的駆動を支持するキャリアを含む。キャリアは、特定の皮膚科ケア器具を支持する大きさおよび形状にすることができ、かつ/またはキャリアが複数の異なる皮膚科ケア器具を支持することを可能にする調整可能な要素を含むことができる。皮膚科ケアセッションは、サブ領域に電磁(EM)放射線、例えば超短パルス光(IPL)ビーム、レーザビームが照射される脱毛セッション、またはIPL、レーザ、紫外光源、または高周波モノポーラもしくはバイポーラ治療電流および/もしくは超音波による他の皮膚治療セッションとすることができる。別の実施例では、皮膚科ケアセッションは、サブ領域の画像が診断のために撮影され、かつ/または医師または別の介護者の実時間検査のために表示される診断セッションとすることができる。該装置は、任意選択的に互いに接触している皮膚サブ領域間のキャリアの移動を調整する制動ユニットをさらに含む。そのようにして、制動ユニットは、プロセスのペーシングを助け、かつサブ領域の重複治療または治療すべき領域の不用意な飛越しを回避することによる皮膚領域の過剰治療の回避を助ける。そのような調整は、オペレータが複数領域の治療プロセスに注ぐように要求される注意および/または努力の量を軽減させる。
【0074】
該装置は、皮膚科ケア器具の操作方法を制御および/または変更することなく、皮膚科ケア器具からの信号に応じて制動機構(解除)を操作するユニットとしてみることができることに注目すべきである。そのような実施形態では、装置のキャリアは、装置がなんら調整することなくあるいは皮膚科ケア器具と統合することなく機能するように、事実上どんな皮膚科ケア器具も支持するように設定される。これは、患者の身体上の場所および/または位置を監視し、かつ特定の皮膚科ケア器具に特定のトリガ信号を送信して照射サイクルをトリガすることによって、特定の皮膚科ケア器具を制御するように設定される、公知の装置に特定的な断続的前進装置とは異なる。
【0075】
任意選択的に、該装置は、皮膚科ケアセッションの実行、開始、および/または終了を検出するための検出器を含む。そのような実施形態では、制動ユニットは、ケア器具が皮膚科ケアセッションを実行するペースに応じて、皮膚科ケア器具の駆動を調整する。例えば検出器は、皮膚科ケアセッションが実行されたことを示す光を皮膚科ケア器具が皮膚領域に向かって放出したときに、それを検出する光検出器とすることができ、該装置は、複数領域の皮膚科ケアプロセスを続行するために、別の皮膚サブ領域上に再配置する必要がある。
【0076】
加えて、または代替的に、該装置は、キャリア101が皮膚領域上で、例えば1つの皮膚サブ領域の中心から別の皮膚サブ領域に、予め選択された距離より大きい距離を移動することを防止するかまたは難しくする機械的および/または電子的移動組立体を含む。そのような実施形態では、制動ユニットは移動追跡器に従ってキャリアの移動を調整する。例示的な機械的移動停止機構は、装置の駆動中に回転する車輪の回転内の張出し要素に基づくことができる。
【0077】
本発明の一部の実施形態では、皮膚領域上を移動した皮膚科ケア器具の距離に応じて、皮膚科複数領域ケア治療を案内する方法を提供する。該方法は、例えば上で概説しかつ下に記載するように皮膚科ケア器具が複数の皮膚科ケアセッションを実行する間、患者の皮膚領域上の皮膚科ケア器具の駆動を支持することに基づく。この支持は、例えば移動インジケータを使用し、かつ距離に応じて駆動を調整するように制動ユニットを操作することによって、駆動中に皮膚科ケア器具が移動した距離を自動的に推定することを可能にする。
【0078】
本発明の一部の実施形態では、皮膚科ケアセッションの実行中に放射される電磁パルスの検出に応じて、複数領域の皮膚科ケアプロセスを案内する方法を提供する。該方法は、患者の皮膚領域上の皮膚科ケア器具の駆動を支持すること、皮膚科ケア器具によって断続的に放射される複数の電磁パルスを、治療光の散乱部分を検出する光検出器のような少なくとも1つの電磁放射検出器によって自動的に検出すること、および電磁パルスに応じて制動ユニットを操作して駆動を調整することに基づく。
【0079】
本発明の一部の実施形態では、装置100は、診断または治療装置の断続的前進を調整するものであって、治療および/または診断器具を制御または作動させるものではなく、むしろ治療および/または診断器具の操作によって制御および/または作動される。該装置は、制動ユニット104が皮膚領域上の装置200の駆動に対する抵抗を変化させるにつれて、治療領域上での診断および/または治療器具の操縦を制御する。抵抗の変化は、治療パルスが器具によって放射されるまで待つようにオペレータに指示かつ/または強制し、次いで別の皮膚サブ領域に器具を駆動するようにオペレータに指示かつ/または許可する。その結果、装置は、異なる動作パターン、プログラム、および/またはハードウェアを持つ種々の器具を案内するために使用することができる。
【0080】
本発明の少なくとも1つの実施形態を詳しく説明する前に、本発明は、その適用において、下記の説明に示されるか、および/または図面および/または実施例において例示される構成要素および/または方法の組み立ておよび構成の細部に必ずしも限定されないことを理解しなければならない。本発明は他の実施形態が可能であり、または様々な方法で実施または実行されることが可能である。
【0081】
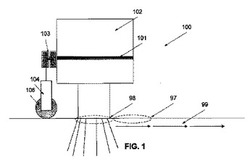
ここで図1を参照すると、それは、本発明の一部の実施形態に係る、患者の背中、腹部、および/または肢体のような大きい皮膚領域99を検査、診断、および/または治療するために、複数領域の皮膚科ケアプロセスを実行する皮膚科ケア器具を案内する装置100の略図である。本書で使用する場合、複数領域の皮膚科ケアプロセスとは、患者の背中、腹部、および/または肢体のような大きい皮膚領域の複数の皮膚サブ領域が断続的に治療、検査、および/または診断される複数のセッションに基づく治療、検査、および/または診断プロセスである。
【0082】
装置100は、皮膚科ケアセッションを実行する皮膚科ケア器具102および/またはそのような装置のヘッドを着脱自在に支持するキャリア101を含む。任意選択的に、キャリア101は、複数領域の皮膚科ケア器具またはそのヘッド102を調節可能に締着、支持、および/または別の方式で取り付ける帯掛けベルトである。複数領域の皮膚科ケア器具102のヘッドは、治療および/または診断ヘッドのハンドピース、または手動でかつ/または自動的に操縦するように調整されたリードとすることができる。複数領域の皮膚科ケア器具102は、ハンドヘルドエピスコープ、ダーモスコープ、および/または画像センサ、例えば相補型金属酸化膜半導体(CMOS)ベースの検出器および/または皮膚部分の画像を取得するように適応された電荷結合装置(CCD)ベースの検出器、カメラ、ビデオカメラ、触覚治療器具、臨床用に皮膚に送達されるエネルギのパルスを生成するための電磁エネルギ(EM)トランスミッタ、またはヘッドもしくはそのようなパルスの導管のリードとすることができる。例えばEMトランスミッタは、皮膚に超音波を放射する超音波トランスミッタ、超短パルス光(IPL)脱毛器、およびパルス・レーザ・ビームを放出するためのレーザ源、例えばダイオード・レーザ・アレイ、または任意の他の治療用エネルギ源である。簡潔を期して、複数領域の皮膚科ケア器具102とは上述の装置または装置ヘッドの1つ以上を意味する。複数領域の皮膚科ケア器具102は、例えば98で示すように、治療、検査、および/または診断される大きい皮膚領域99の皮膚サブ領域で各皮膚科ケアセッションを実行するように設計される。
【0083】
任意選択的に、皮膚科ケアセッションは、皮膚サブ領域98でフォトトリコリシス(phototricholysis)または光脱毛を実行するためにフルスペクトル光を放射することを含む、IPL脱毛器の脱毛セッションである。任意選択的に、皮膚科ケアセッションは、そこに撮像された色素性病変を診断するため、または癌性病理が疑われる皮膚の状態を診断するために、皮膚サブ領域98の画像を捕捉することを含む。任意選択的に、皮膚科ケアセッションは検査セッションであり、複数領域の皮膚科ケア器具102は、医師または別の介護者の診断のために皮膚サブ領域98の画像を投影する、ハンドヘルドエピスコープおよび/またはダーモスコープである。
【0084】
複数領域の皮膚科ケア器具102は皮膚科ケアセッションを繰返し実行し、そこで患者の背中、腹部、および/または肢体の少なくとも60%、任意選択的にこれらの領域の少なくとも80%、例えばこれらの領域の約100%のような大きい皮膚領域を検査、診断、および/または治療するために、複数のケアセッションが行なわれる。複数領域の皮膚科ケア器具102を大きい皮膚領域99で操縦中に、例えば大きい皮膚領域99の皮膚サブ領域の画像を捕捉することができ、かつ/または1つ以上のパルス・レーザ・ビームおよび/または超音波のようなEM波を、そのような皮膚サブ領域に放射することができる。本書で使用する場合、大きい皮膚領域でとは、その皮膚サブ領域を検査、治療、および/または診断するために、複数領域の皮膚科ケア器具102が大きい皮膚領域99に接触しているか、あるいは大きい皮膚領域の上に配置されているときを意味する。
【0085】
1つの皮膚サブ領域で、または重複する皮膚セグメント上で複数のセッションを実行すると、患者を冗長放射に曝露させ、かつ/または複数領域のプロセス時間を増大させ、好ましくない。
【0086】
装置100は、キャリア101および複数領域の皮膚科ケア器具102の大きい皮膚領域99での移動、例えば1つの皮膚サブ領域から別のサブ領域への、例えば皮膚サブ領域98から皮膚サブ領域97への移動を調整する制動ユニット104をさらに含む。そのようにして、皮膚科ケア器具102、例えばレーザ脱毛システムのハンドピースまたは皮膚病変診断システムの画像センサによって治療、診断、または検査される領域における重複を低減または排除することができ、かつ大きい皮膚領域99を検査、治療、または診断するためにかかる時間が短縮される。調整は、皮膚科ケアプロセスの実施、作動、および/もしくは操作、ならびに/または大きい皮膚領域上での装置100の移動を監視することによって実行される。調整は、皮膚の色または形状の結果として、かつ/または皮膚科ケアプロセスの実施および/もしくは操作ならびに/または移動に対する皮膚の反応の結果として実行されるものではないことに注目すべきである。
【0087】
任意選択的に、制動ユニット104は、皮膚科ケアセッションの実行中にではなく、皮膚科ケアセッションとセッションの合間に、皮膚サブ領域から近接皮膚サブ領域へ自動的にかつ/または手動で駆動される。
【0088】
加えて、または代替的に、制動ユニット104は、皮膚科ケアセッション中、または例えばその始動の約0.1秒、0.5秒、1秒、2秒、4秒、8秒、および15秒前の期間中に、1つ以上の移動要素を抑制することによって、キャリア101の移動を調整する。
【0089】
例えば、図1に示すように、制動ユニット104は、車輪105を含む。しかし、制動ユニット104は、キャリア101に動作可能に接続されかつキャリアが患者の皮膚上を移動するときに回転または転動するように適応された、複数の車輪、1つ以上のローラ、および/またはボールを含むことがある。そのような実施形態では、制動ユニット104は、検出器の出力に応じて1つ以上の車輪、ローラ、および/またはボールの回転または転動自由を抑制する1つ以上の車輪制動器をさらに含む。例えば、制動ユニット104は、102の性能の検出器の出力に応じて、1つ以上の車輪、ローラ、および/またはボールの回転または転動を部分的にまたは完全に抑制することができる。そのような抑制は、皮膚領域上の装置200の駆動に対する抵抗を変化させる。
【0090】
装置100は、皮膚科ケア器具102に、例えば脱毛システムのヘッド、または手動もしくは自動診断のために病変の画像を取得するために使用されるカメラに、一体的に形成することができることに注目すべきである。そのような実施形態では、キャリア101は、皮膚科ケア器具102および装置100の構成要素を含むかまたはそれらに取り付けられた筐体に置き換えることができる。
【0091】
ここで図2Aをも参照すると、それは、本発明の一部の実施形態に従って、複数領域の皮膚科ケアプロセスを案内する方法のフローチャートである。該方法は、装置100が皮膚領域99上を案内されるペース、および/または装置の速度を案内することを可能にする。
【0092】
最初に、201に示す通り、皮膚科ケア器具102はキャリア101に配置される。任意選択的に、オペレータは、それに利用できる複数の可能な皮膚科ケア器具102から皮膚科ケア器具102を選択する。例えば複数領域のプロセスが大きい皮膚領域の脱毛プロセスである場合、脱毛器ヘッドがキャリアに装着される。別の実施形態では、オペレータは、色素性病変の診断のために1つ以上の画像センサを含む皮膚科ケア器具を装着することができる。任意選択的に、キャリア101は、1つ以上の調整可能なストラップおよび/またはバンドの周長を変更することによって、皮膚科ケア器具102に取り付けられる。
【0093】
次に、202に示す通り、皮膚科ケア器具が複数領域のプロセスを各々、大きい皮膚領域の複数の皮膚サブ領域の1つで実行する間、皮膚科ケア器具102付きのキャリア101は、大きい皮膚領域上を駆動、例えば滑走される。
【0094】
本発明の一部の実施形態では、キャリア101および皮膚科ケア器具102はオペレータによって手動で操縦され、例えば押動される。例えば、図3Aに示す通り、オペレータは患者の皮膚99上の経路に沿って皮膚科ケア器具102を駆動することができる。任意選択的に、図3Aに描かれたキャリア101および車輪219は、中心軸121を中心に皮膚科ケア器具102を回転させる。キャリア101は、中心軸121の助けにより患者の皮膚上での方向の漸次変更を可能にしかつ/またはその向きを特定の軌道に制限しながら、支持された皮膚科ケア器具102を、車輪219の面と平行な線に沿った方向に駆動させることができる。そのような制限は、1つ以上の車輪、ローラ、および/またはボールの回転および/または回動を1つ以上の方向に固定することによって適用することができる。
【0095】
本発明の一部の実施形態では、皮膚科ケア器具102付きキャリア101は、それに動作可能に取り付けられた、例えばロボットハンドおよび/または作動手段、例えば1組の車輪等によって、自動的に操縦される。
【0096】
患者の皮膚上での皮膚科ケア器具102の駆動中に、例えば上述したように、複数の皮膚科ケアセッションが実行される。
【0097】
203に示す通り、キャリア101の移動および/または皮膚科ケアプロセスの実行は、皮膚上でのキャリアの作動中に監視される。この監視は、皮膚の色および/もしくは形状ならびに/またはセッションに対する皮膚の反応に応じてではなく、その実際の動作および/または作動に応じて、皮膚領域上での皮膚科ケア器具の駆動の調整を可能にする。
【0098】
したがって、204に示す通り、複数領域の皮膚科プロセス中に、皮膚サブ領域の1つから別の1つへの皮膚領域上でのキャリア101の移動が調整され、移動の停止により終了し、次のケアの実行を受動的に待つ。
【0099】
ここで、図2Bをも参照すると、それは、本発明の一部の実施形態に従って、複数領域の皮膚科ケアプロセスを実行するべく、102のような皮膚科ケア器具を支持する101のようなキャリアを案内する方法210のフローチャートである。ブロック201は上述の通りである。次いで、212に示す通り、キャリア101は、キャリアによって、例えば制動ユニット104によって加えられる抵抗が増大するまで、皮膚のサブ領域上を駆動される。任意選択的に、増大した抵抗はキャリアを停止させる。次に、213に示す通り、ケアセッションは、駆動される皮膚科ケア器具102によって自律的に実行される。次に、214に示す通り、キャリア101によって加えられる抵抗は変化して、皮膚科ケア器具102を隣接サブ領域へ駆動させ、複数領域の皮膚科ケアプロセスを続行することを可能にする。
【0100】
本発明の一部の実施形態では、装置100は、皮膚科ケアセッションの開始、皮膚科ケアセッションの終了、および/または皮膚科ケアセッションの合間を検出する、本書で検出器103と呼ばれる1つ以上の検出器をさらに含む。例えば、検出器103は、そのようなEM波の放出および/またはそのようなEM波の放出の欠如を検出するように調整される。検出器103は、例えば脱毛セッション中に皮膚サブ領域から反射した光を測定することによって、皮膚サブ領域の照射を検出するように適応された光検出器とすることができる。
【0101】
例えば、次に図4A〜4Cを参照すると、それらは、本発明の一部の実施形態に係る、光検出器103に接続された制動ユニット104の一連の略図である。制動ユニット104は、図1の101に示す通り、キャリア101に接続されるように設計される。上述と同様に、制動ユニット104の車輪105は、皮膚科ケア器具102が皮膚領域上で駆動されるときに、皮膚領域と接触する。制動ユニット104は、キャリア101の移動軌道に垂直な軸内で上昇しかつ下降するように適応された第1板134と、車輪105に取り付けられた第2板133とを有する車輪制動器を含む。板133、134は、例えば図4Aに示すように第1板134が下降したときに、第2板133が第1板134と衝突するように共通面内に配置される。任意選択的に、電磁石172のソレノイドに電流が流れたときに、板134は電磁石172によって上昇される。現在の実施形態で使用することのできるソレノイドの例として、NSF Controls,UKによって製造されたチューブ状ソレノイド型式SDT1327L−2XXがあり、その仕様書を参照によって本書に援用する。任意選択的に光検出器組立体である検出器103が、皮膚ケア治療または診断の自律的実行の結果発生する光114を検出すると、電池のような電源からの電流を電磁石172に流れさせる回路が閉じ、電磁石は、図4Bに示すように、任意選択的に磁石である板134を上昇させて、車輪105が自由に回転することを可能にする。このプロセスは数ミリ秒しかかからない。上昇から予め定められた時間後に、回路は開き、図4Cに示すように、板134は任意選択的に重力によって下降する。これは2分の1秒、例えば約150〜200ミリ秒しかかからない。このプロセスは、例えば検出器によって検出される繰返し照射14と同期する板134の繰返し解放を示すグラフである図5に示すように、検出器103が照射を検出するたびに繰り返すことができる。
【0102】
自律とは、装置100またはその中に具現された何らかのセンサからのコマンド、指示、測定、および/または命令無しに、皮膚科ケア器具102によって実行される皮膚科ケア動作に関連することに注目すべきである。
【0103】
任意選択的に、板133は柔軟であり、板134が下がっているときでも、オペレータが装置100を動かすことが可能である。この実施形態は、故障の場合にオペレータが装置100を操縦し、特定の皮膚サブ領域の火傷を回避することを可能にする。
【0104】
図6は、パルス光114が放射されたときに、板134が解放されることを可能にする回路の略図である。同様の回路は、光検出によってトリガされる他の制動システムに使用することができる。該回路は、フォトダイオード91が光を検出したときに、電池93または他の電源からの電流iを電磁石172に流れさせる。光が検出されないときは、電流の流れは阻止され、板134は下降する。任意選択的に、板134は希土類金属から作られる。
【0105】
任意選択的に、各皮膚科ケアセッションは、レーザビーム光放射のような1回以上の光放射を含む。そのような実施形態では、支持された皮膚科ケア器具102は、パルス・レーザ・ビームを放射するために、超短パルス光(IPL)脱毛器および/またはレーザ源、例えばダイオード・レーザ・アレイを含むことができる。そのような実施形態では、検出器103は、光源の励起を検出する光検出器を含む。図7は、大きい皮膚領域に沿った装置100の断続的前進を概略的に示す。光パルス114はT秒毎に検出器103によって繰返し検出される。制動ユニット104は、検出された光パルス114に応じて、例えば1回以上の光放射のセッションが検出された後で低い機械的インピーダンスが加えられ、ケア/診断セッションの終了時にキャリア101の自由移動が可能になる一方、キャリア101が領域98または97の端に達すると、高い機械的インピーダンスが加えられ、その結果移動が停止するように、車輪制動器を作動させることによって、キャリア101の移動を調整する。
【0106】
任意選択的に、制動ユニット104は、検出器103によって記録される1回以上のセッションに応じて較正される。例えば、制動ユニット104は、2つの逐次的セッション間の合間を計算し、かつそれに応じてインピーダンスパターンを調時することができる。そのような較正は、セッションがいつ開始するかを推定し、それに応じて、例えば図7に関連して時間T1の後または時間T2の前に、制動ユニット104が作動することを可能にする。キャリア101が手動で操縦される場合、加えられるインピーダンスの変化が、装置100をいかに駆動させるかオペレータを誘導する。任意選択的に、制動ユニット104は、ケアセッションの、例えば繰返し閃光の繰返し挙動のようなパターン、例えばレートおよび/または位相を学習し、かつ例えばコイルおよび/または使用することのできる任意の他の制動機構を作動させることによって車輪制動器を制御するべく、同一挙動を持つパルスのような命令を発生する、位相ロックループ(PLL)回路のような学習モジュールを含む。そのような較正は、閃光の強度の変動、例えば皮膚上の装置の位置、皮膚の反射率、および/またはオペレータの手の位置の変化によって生じる変動に対する感受性を低減させる。装置100を調整するためにPLLが使用されるときに、例えば検出器103の遮蔽のため1回以上の閃光が検出されない場合、制動ユニット104は装置の移動を誤調整しないことに注目すべきである。
【0107】
本発明の一部の実施形態では、板134が永続的に下降位置にある場合、オペレータはそれを検知する。その場合、図7で最初の2つの事象にも描かれる通り、オペレータが装置102のケア処置実行の自律的繰返し率に適応するのに、数回の治療セッションを要することがある。
【0108】
上述の通り、皮膚科ケア器具102はハンドルを組み込んだIPLハンドピースとすることができる。ハンドルは、上述の通り、使用者がそれに取り付けられた装置100を操縦することを可能にする。そのような皮膚科ケア器具102は、治療用光源と、例えば図1に示す通り皮膚と接触する光導体とを含む。各セッションで、皮膚科ケア器具102は、皮膚を透過する赤外光のような光パルスを放出する。例えば各放射は、光源の種類によって、約〜100マイクロ秒から約〜200ミリ秒の間、例えば〜15ミリ秒の持続時間、および約〜5から〜40ジュール/cm2の間、例えば〜20ジュール/cm2のエネルギ密度を有する。パルス波長は、IPLの場合、約400nmから約1500nmの間である。大きい領域を処置する場合、IPLは自動繰返しモードで動作し、パルスは1〜4秒毎に放出される。他の繰返し率は、例えば皮膚科ケア器具102がLightSheer(商標)装置である場合、毎秒1〜2パルスの間とすることができ、例えば皮膚科ケア器具102がAlma(商標)EPLまたはLumenis(商標)Quantum装置である場合、3〜4秒毎に約1パルスとすることができる。繰返し率はQスイッチレーザの場合1〜10パルス/秒、皮膚表面再生に使用されるCO2レーザの場合、0.5〜2パルス/秒とすることができる。明確にするために、装置100はローラ105の移動または移動速度および/または照射率に応じて設定することができる。非限定的な例として、1パルス/秒の治療繰返し率で長さ1cmの1つの皮膚サブ領域から別のサブ領域に移動する間、装置の移動速度は1cm/秒より高くなければならない。照射のための待機時間が発生し、かつ照射も時間がかかるので、実際の移動はより高速であるが、移動速度は毎秒1cmとみなすことができる。オペレータは治療装置に加える手動力をパルス繰返し率に適応させるので、両方の数量の間には関係がある。
【0109】
次に図8を参照すると、本発明の一部の実施形態に係る、パルス・レーザ・ビームのような光ビームの監視された放射に応じて複数領域の皮膚科ケアプロセスを案内するための例示的装置700である。該装置は、IPLハンドピースまたはレーザ皮膚科ケア器具102が治療ビーム205を特定の皮膚サブ領域に放出したときに、皮膚から散乱した光206を感知することができるように、検出器103の正面を皮膚サブ領域の方向に向ける支持体701を含む。支持体701は任意選択的に、検出器103を皮膚サブ領域に近接して、例えば皮膚サブ領域から数センチメートルに保持するアームである。検出器103は皮膚サブ領域の方向に向けられ、そこから短い距離に配置されるので、たとえ類似のパルス幅および強度を有する場合でも、サブ領域からの反射に対する感度は増大し、外部照射源および閃光からの周囲光信号に対する感度は低下する。任意選択的に、支持体701は可撓性ステムから作られる。そのようにして、皮膚科ケアセッションを実行するために使用される皮膚科ケア器具102に応じて、検出器103の配置を調整することができる。支持体701は任意選択的に、キャリア装置に取り付けられたマウント702に接続される。任意選択的に、ハンドル704が皮膚科ケア器具102に取り付けられる。
【0110】
本発明の別の実施形態では、装置100は、複数領域のプロセス中にオペレータの腕を装置100に対して固定する、手固定要素を含む。例えば図9に示すように、キャリア101は物理的に、装置101をオペレータの腕に固定する弾性バンドを含む帯掛け機構141に接続される。そのようにして、装置100を皮膚99の大きい領域の直線帯状部に沿って安定的に駆動することができる。
【0111】
上述の通り、大きさの異なる様々な皮膚科ケア器具を使用することができ、検出器103の配置はそれに応じて調整することができる。検出器103からの信号は、上述の通り制動ユニット104を制御するために使用される。
【0112】
ここで再び図3Aを参照すると、それは、本発明の一部の実施形態に係る、移動追跡器に従って皮膚科ケア器具102の操縦を調整する例示的装置を示す。キャリア101および支持された皮膚科ケア器具102は、図2Aに描かれた通りである。しかし、図3Aでは、制動ユニット104は、半径Rを有する車輪219内に配置された移動停止機構を含む。移動追跡器は、ケア器具の内部動作を制御することなく、例えば光の放出、画像の取得等を制御または実行することなく、皮膚科ケア器具102の駆動を調整することができるように、1つの皮膚サブ領域から別のサブ領域への通過を示す。図3Aで、各皮膚サブ領域の長さはLで表わされる。装置101を手動的に、例えば手212で押動させる間、車輪219は一方向に自由に転動する。例えば図3Bは、患者80の背中で装置100を滑走させる例示的オペレータ80を示す。オペレータ80は、任意選択的に脱毛システムのヘッドである皮膚科ケア器具102を、滑走中に保持する。装置100は、患者80の背中の大きい皮膚領域上での皮膚科ケア器具102の移動を、例えば下述しかつ上で概説したように、装置101および/または皮膚科ケアセッションの移動に応じて調整する。
【0113】
例示的移動追跡器は、車輪219を支持しかつ板124のようなフレーム延長体を有するフレーム120を含む。回転板123のような回転延長体123は、車輪219の側面の1つに取り付けられる。延長体123、124は、車輪の回転軸220に垂直な共通平面上に配置される。そのようにして、延長体123、124は、車輪219が完全に1回転するたびに衝突する。そのような実施形態では、車輪の半径は、2つの隣接する皮膚サブ領域の中心間距離Dに応じて設定される。例えばR=D/2πである。そのようにして、衝突は、車輪がDに等しい距離だけ回転したときに、すなわち装置が1つの皮膚サブ領域の中心から隣接する皮膚サブ領域の中心に移動したときに、発生する。任意選択的に、回転板123は、ここでBと表わされる比較的高い撓み係数を有する。撓み係数は、延長体123、124の少なくとも一方の組成、および/またはそれらの厚さによって設定することができる。そのような実施形態では、回転延長体124は、フレーム延長体123との衝突後に屈曲する。屈曲は、操作するオペレータが感じるインピーダンスの増加で表わされる。図10Aは、屈曲角度θを有する回転延長体を持つ例示的車輪219を示す。図10Bは例示的グラフを示し、ここでθは屈曲角度を表わし、X軸の表記は第1皮膚サブ領域の中心からの距離を表わす。屈曲によって加えられるこのインピーダンスは、皮膚科ケアセッションが発生した印をオペレータが受け取るまで、例えばパルス・レーザ・ビームの照射をオペレータが観察するまで、装置101の速度を低下させかつ/または装置100を停止させるためのオペレータへの合図とすることができる。任意選択的に、撓み係数は、装置100の移動速度を低下させるのに充分であるように設定される。速度低下のレベルは、オペレータが装置100をどのくらいの速さで押動させていたかによって異なる。何らかの皮膚科ケア器具102が使用されている場合、オペレータは、治療部位を直接見ることなく、セッションの実行に関する印を受け取ることがあることに注目すべきである。オペレータは、パルス・レーザ・ビームの治療室の壁からの反射を見ることがある。オペレータが光パルスを見るたびに、オペレータは、制動ユニット104によって加えられるインピーダンスを克服するために、より勢いよく装置100を押動させることによって自動的に反応する。任意選択的に、セッションのレートは、レーザベースの脱毛器具の場合には毎秒約1〜2パルスであり、かつ/またはIPLのような脱毛器具の場合には3秒に1パルスである。
【0114】
図11Aに示す通り、本発明の一部の実施形態では、フレーム板123の代わりに、ばね132によって押圧されるボール131を使用することができる。そのような実施形態では、インピーダンスはばね132の撓み係数に応じて決定される。延長体の1つ以上を、例えば較正プロセスに応じて、オペレータに適合するように選択することができる。
【0115】
任意選択的に、回転板123またはばね131は、制動機構の動作がオペレータによって実施される作業計画および/またはオペレータの快適性に適合するように、調整することができる。顧客に供給されるキットに様々なばねまたは板を提供することができる。上述の通り、装置100は、大きい皮膚領域を検査、診断、かつ/または治療するべく、複数領域の皮膚科ケアプロセスを実行するように複数の異なる皮膚科ケア器具を案内するために使用することができる。これらの皮膚科ケア器具は各々、異なるレートの皮膚科ケアセッション、異なる長さの各皮膚科ケアセッション、および/または異なる大きさの皮膚サブ領域に対して調整される異なる作業領域を持つことができる。任意選択的に、複数の異なる制動機構またはその部品を含むキットが提供される。キットの各構成員、例えば制動機構、車輪、および/または制動器は、異なる皮膚科ケア器具の特徴に適合する。例えば一部の車輪はより大きい半径を有し、一部の車輪はより小さい半径を有する。半径が大きい場合、板124は、より大きい距離を転動した後で回転延長体123と交わる。半径が小さい場合、板124はより小さい距離を転動した後で回転延長体123と交わる。そのようにして、キットは、異なる作業領域を持つ異なる皮膚科ケア器具に案内を適応させることを容易にする。
【0116】
次に図11Bを参照すると、それは、本発明の一部の実施形態に係る、車輪219および制動ユニット104の指定シャフト903の略図である。図11Bに示す通り、板124は車輪219のリムの内側に配置され、車輪と共に回転する。ボール131は、装置100に不動に接続されたシリンダ900内に位置する。ボールは、下述の通り押されたときに、シリンダ900の穴から部分的に張り出す。シリンダ900の内側ではシャフト903の周りにばね132が位置しており、円錐形要素を押し、それがボールを上方に押し、その結果ボール131の部分的張出しがもたらされる。板124がボール131と衝突すると、ばねの圧縮を克服するように比較的強い力がオペレータによって加えられない限り、それは停止される。別の実施形態では、車輪219の運動に対するボール131の抵抗は、電流がソレノイドに流れる間円錐形要素を左側に引っ張るソレノイド904の助けにより、解放される。任意選択的に、解放電流は、上述しかつ図7に示す通り、光信号114を検出すると加えられる。図11Bに示した実施形態の利点は、ゲルが制動ユニット104の機構内に浸入するのを防止するために、機構全体を密封することができることである。
【0117】
任意選択的に、複数の延長体が車輪219に取り付けられる。同様に、回転延長体123は、例えば図12に示すように、完全に1回転するたびに2回フレーム延長体124と衝突するように配置される。N個の回転要素が車輪219に取り付けられる場合、各々距離L=2πR/Nの同一前進ステップを達成するために、半径Rを持つより大きい車輪を使用することができる。例えば約7〜20mmの半径を有する比較的大きい車輪を使用すると、調整の精度が高まることに注目する必要がある。脱毛プロセスのような一部の複数領域のプロセスは、Ab Sonic Gymnic TENS Uの導電性ゲルレーザ脱毛のように、大きい皮膚領域を局所麻酔ゲルおよび/または冷却ゲルのようなゲル層で被覆することを含む。そのようなゲルの層は、車輪を被覆することがあるので、装置によって提供される案内の精度を低減させることがある。しかし、車輪の半径が大きければ、ゲルの層が車輪を被覆することはできず、したがって案内の精度に対する影響は小さくなる。加えて、車輪軸は乾燥すると粘着し、かつ/またはすべすべになるゲルによって被覆されない。一例として、皮膚科ケア器具102が、その仕様書を参照によって本書に援用するLumenis(商標)のLightSheer(商標)システムのヘッドのような脱毛システムである場合、皮膚サブ領域の長さとすることのできるL=1cmの前進は、ゲルによって容易に被覆される直径が約3mmの車輪ではなく、1.05cmの直径を有しかつ各対の間に120°の角度を有する3つの回転要素を備えた車輪により、容易に達成することができる。
【0118】
任意選択的に、車輪219の直径は、皮膚科ケア器具102の特性に合わせて調整される。任意選択的に、特性は、油性または湿った皮膚表面とその上に配置される皮膚科ケア器具102、例えばIPLベースの装置の光導体の正面との間の摩擦係数である。任意選択的に、特性は、皮膚科ケア器具102またはそのリードの重量、および/または装置を押動させるユーザの推力である。
【0119】
任意選択的に、車輪219は、例えば図13に示すように、例えばはめば歯車として歯を持つ。そのような実施形態では、周囲の歯312は皮膚との摩擦を増大させ、ゲルを積層した皮膚領域上での装置102の滑動性を低下させる。本発明に係る歯付き車輪を製造する方法の非限定的な例は、コーティングによる車輪周面およびサンドペーパの肌理を持つ層または粗面を持つ車輪基部を機械的に整形する。ゲルの塗布層の厚さならびに/または車輪のはめ歯/歯の長さおよび/もしくは先鋭さに関しては、摩擦と患者の快適性との間にトレードオフが存在する。例えば先鋭な歯は不快であるが、先鋭さを低下させると、ゲルが使用されるときに車輪が滑動することがある。任意選択的に、外周を酸化アルミニウム結晶の粉末をコーティングした車輪が使用される。そのような粉末は、英国Saint Gobain abrasive Ltd.によって製造された「スーパーフレックス・クローズド・バック研磨材」細粒度120のサンドペーパ上に見られ、その仕様書を参照によって本書に援用する。微結晶砕片に見られる鋭利な縁は、ガラスのような非結晶砕片のより平滑な縁とは対照的に、高い摩擦をもたらす。約125ミクロンの小さいサイズの微結晶砕片は、それらの非常に鋭利な縁にもかかわらず、相対的な皮膚の快適さをもたらす。本発明の一部の実施形態では、制動ユニット104は、非平面状表面内のキャリア101の移動を調整するように適応させることができる。例えば図14は、図7に示した制動ユニットであるが、皮膚科ケア器具102の移動軌道および皮膚99の表面が平行ではない場合に、車輪219と皮膚99との間の接触を維持するためのばね31をさらに含む制動ユニットを示す。ばね31は車輪219およびフレーム120を皮膚99に向かって押す。そのようにして、車輪219の回転に対して加えられるインピーダンスは、肢体の皮膚表面のような湾曲面でさえもキャリア101の移動に影響する。
【0120】
本発明の一部の実施形態では、制動ユニット104は、2次元での皮膚科ケア器具102の移動を調整するように適応することができる。そのような実施形態では、皮膚科ケア器具102は、単一の複数領域プロセス中に、皮膚の大きい領域の片側から皮膚の大きい領域の別の側まで、皮膚の大きい領域の上から皮膚の大きい領域の下まで、操縦することができる。例えば、次に図15Aおよび15Bを参照すると、それは図3Aに示した装置の略図であり、制動ユニット104は、直交回転軸を有する2つの異なる車輪219、719を支持する2つのフレーム120、720を含む。フレーム120、720は、車輪219、719の1つを皮膚99に別々に接触させる一方、もう1つの車輪719、219が自由であるように、操縦することのできる共通回転要素700に対し直角に接続される。使用中に、任意選択的に共通回転要素700を回転させて、装置が操縦される方向に応じて車輪719、219の1つとの接触を確立させる。
【0121】
そのような実施形態では、車輪219、719の各々の半径は、皮膚科ケア器具102によって検査、治療、および/または診断される皮膚サブ領域のそれぞれの寸法に合わせて調整される。例えば図15Aおよび15Bで、車輪219の半径は、1つの皮膚サブ領域の中心と、キャリア101を前方に移動するときに位置する近接皮膚サブ領域の中心との間の距離に合わせて調整され、車輪719の半径は、1つの皮膚サブ領域の中心と、キャリア101を直角方向に、横方向に移動するときに位置する近接皮膚サブ領域の中心との間の距離に合わせて調整される。一例として、皮膚科ケア器具102が大きさ40mm×10mmを有するIPL治療ヘッドである場合、IPLヘッドを40mm前方または後方に、かつ10mm側方に押動する必要がある。装置100の長さL=3cmの前進には、直径3/π<1cmの車輪が必要である。その結果、断続的駆動組立体全体を、非常に小さく約2〜3cmほどにすることができる。
【0122】
次に図16を参照すると、それは、本発明の一部の実施形態に係る、色素性病変を診断するための装置800の略図である。キャリア101および制動ユニット104は上述の通りであるが、図16は、診断用に大きい皮膚領域を撮像するための撮像装置を支持する皮膚科ケア器具102を示す。
【0123】
そのような装置800は、癌性パターンを持つ病変および/または病理学的状態の病変が未熟練者によって検出されるように設計することができる。任意選択的に、皮膚科ケア器具102は、オペレータが手動で押す、市販のデジタルカメラのようなカメラである。カメラは、CCDベースのセンサのようなセンサ850、およびレンズ852を有する。任意選択的に、ガラスおよび/またはプラスチックのブロックのような光導体851が、カメラ102の前に配置される。任意選択的に、光導体851は透明であり、皮膚99に面する側が研磨され、その反対側は任意選択的に拡散白色を塗装され、側部を黒色で被覆される。任意選択的に、光導体851は、光導体851内に組み込むことのできる光ファイバのような延長体857を含む。1つ以上のフラッシュランプの素子のような光源855が延長体857に接続され、白色光を延長体857の方向に放出するように向けられる。そのようにして、光源855が閃光したときに、光導体851は領域ABに均質な照射を提供する。カメラ102は任意選択的に、皮膚99の画像を連続的に取得するオートフォーカス機構付きのビデオカメラまたはビデオモードのカメラである。制動ユニット104は任意選択的に、例えば上述の通り、光検出器によって起動される。そのようにして、装置800の移動は光源855の閃光に応じて調整される。使用中に、光源855は繰返し例えば0.5秒毎に起動され、閃光が制動ユニット104を調時する。オペレータは皮膚表面99上で装置800を押動し、前進は、例えば上述した通り、制動ユニット104によって調整される。制動器が解放されると、装置800は抵抗が無いので容易に前進することができる。装置800がある距離、例えば距離AB=L=2R(Rは制動ユニット104の車輪の半径を表わす)だけ押動されると、制動器が起動され、抵抗が増大する。そのようにして、光源855がトリガされたときに、装置800は実質的に静止し、高品質の画像を得ることができる。そのような繰返しプロセスは、欠落または重複を生じることなく、または実質的に生じることなく、大きい皮膚領域の近接した皮膚サブ領域を順次撮像することを可能にする。カメラは、装置800によって、または任意の他のユニットまたは装置によってトリガされず、装置800とは独立して動作することができる。そのような実施形態では、装置800は、ほとんどどのような市販のカメラでも案内するために使用することができる。
【0124】
任意選択的に、装置は、皮膚科ケア器具102によって取得されたビデオを処理するための解析ユニットを含む。解析ユニットは、皮膚サブ領域を例えばそれらの明るさに従って明確に示すフレームを識別することができる。解析ユニットは、皮膚科ケア器具102の一部とすることができ、かつ/または例えばキャリア101に堅固にまたは着脱自在に取り付けられた、外部の部品とすることができる。カメラはまた、画像を順次取得する繰返しモードで動作することもできる。カメラのフラッシュがオンの場合、キャリアをその停止位置まで迅速に押動させ、カメラが画像を撮影するまで待つことによって、カメラのフラッシュは前述の通り制動器を解放し、一連の高画質の画像が得られる。
【0125】
任意選択的に、装置800が患者の皮膚上を駆動される前に、開始点の較正画像が撮影される。較正画像は、上記撮像プロセスを実質的に同一の仕方で繰り返すことを可能にする。そのようにして、フレームが撮影される順序は同一であるのでフレーム毎の比較を行なうことができる。任意選択的に、較正画像は、患者の皮膚に特定の印221を付けることによって撮影される。任意選択的に、印は装置800を駆動すべき軌道を示す。
【0126】
任意選択的に、皮膚科ケア器具102によって取得されたビデオ、および/またはそのフレームは、解析のために、例えばインターネットを介して、遠隔端末に送信される。任意選択的に、データは、装置800に配置されたセルラインタフェースおよび/またはWi−Fiインタフェースのような、ワイヤレスインタフェースを用いて送信される。任意選択的に、送信されたデータを受信する遠隔端末で差異を見つけるのを助けるために、電子回路はフレーム番号をタグ付けする。そのような実施形態では、装置800は、本書に記載する案内によって初期皮膚癌を検出するための遠隔治療装置として使用される。
【0127】
図17Aおよび17Bは、本発明の一部の実施形態に係る例示的皮膚領域299、すなわちヒトの胴体、および図16に示された装置によって2つの異なる期間に順次撮像される1組の近接皮膚サブ領域299を示す。それぞれのフレームに撮影されるサブ領域間の領域224は、照明されないので、かつ/またはその取得中に装置800が移動するので、暗くかつ/またはぼやけている。セットの各画像は順次等距離皮膚サブ領域の画像である。図17Bでは、同一皮膚領域299が特定の期間後に、例えば1ヶ月後、1年後、および/または任意の中間期間後に撮像される。
【0128】
装置800の断続的移動は光源855の閃光に従って同期されるので、取得されたフレームは、それらの撮影順に他の取得されたフレームと照合することができることに注目すべきである。フレーム#nは、開始点および軌道が同一でありかつ光源855が同一テンポに従って閃光する限り、上述の通り取得された全てのビデオで同一の皮膚サブ領域を表わす。その結果、任意選択的に画像のアラインメントおよび/または登録無しに、色素沈着、および/または病変222、223の数、例えば黒子数の変化を照合により検出することができる。一例として、第1取得ビデオにおけるフレーム番号89が黒子を示す場合、同じ黒子が第2取得ビデオのそれぞれのフレームに示される。そのような画像取得は、特定の病変のそれぞれのフレームを医師のような使用者に同時に表示し、かつ/またはそれぞれのフレームを解析ユニットに転送することを可能にする。色素沈着の変化が第2撮像セッションで取得されたビデオの特定のフレームに示される場合、色素沈着の変化が発生する前に取得されたそれぞれのフレームと照合したときに、それは容易に検出される。そのようにして、大きい皮膚領域における黒子の変化を診断および検出するのに要する時間は、例えば1フレーム当たり10秒以下に短縮される。例えば皮膚領域が約40cm×50cmの背中領域であり、かつ各フレームが2cm×2cmの大きさを有する場合、20×25=500のフレームを撮影する必要がある。装置800を順次前進させることによって、250秒以内に、すなわち4.5分未満で、背中領域を撮影し、任意選択的に解析することができる。
【0129】
次に図18を参照すると、それは、本発明の一部の実施形態に係る、多種多様な大きさおよび形状の皮膚科ケア器具102の帯掛けを可能にする例示的汎用帯掛け機構の略図である。帯掛け機構は、任意選択的に図1の装置100として定義される断続的前進装置17の、IPL器具のような種々の皮膚科ケア器具102への帯掛けを可能にする。帯掛け機構は、一方向に可撓性をもたらす軸1812によって接続されたセグメント188を有するブレスレット187を含む。任意選択的に、ブレスレット187は現在入手可能な時計用バンドと同様である。しかし、セグメント188に軟質層189、例えば約1mmから約5mmの間の厚さを有するシリコン系の層189が加えられる。軟質層189は、使用される皮膚科ケア器具102の勾配および/または形状182に、例えば円錐台形を有するIPLにブレスレット187を一致させる。軟質層189はまた、ブレスレット187と皮膚科ケア器具102の筐体との間の摩擦を増大させる。伸縮要素1810は、層189が圧縮されるまでブレスレット187の締付けを可能にする。任意選択的に、例えば10〜150mmの直径を有する大きいサイズの皮膚科ケア器具に一致させるために、一連のブレスレット(図示せず)が使用される。
【0130】
セグメント188の1つ以上は、金属球183を有する球面継手184に不動に接続された板186に不動に接続される。金属球183は装置17に不動に接続される。したがって、例えば上述と同様に、装置17を任意の方向1811に駆動することが可能である。これは、ブレスレット187を皮膚科ケア器具102の水平および/または垂直両方の部分に取り付けることを可能にする。締付けねじ185は装置17に安定性をもたらす。
【0131】
上述の通り、皮膚科ケア器具102は、光をベースとする装置、例えばIPLユニット、音響治療装置、および/または触角治療装置、例えば触覚刺激を発生しかつ/またはブザー音を放出する装置のような治療装置とすることができる。装置800の移動は治療装置の動作に従って調整されるので、オペレータは少ない努力および/または注意で装置を操縦することができる。装置800は皮膚科ケア器具102の外部トリガを必要としないので、装置800はほとんど全ての皮膚科ケア器具102に適応させることができる。光に基づく治療装置は、Lumenis(商標)、Syneron(商標)、Alma(商標)、Palomar(商標)、Candela(商標)、Quantel(商標)等によって製造されたようなフラクセル、IPL、またはレーザベースの装置の有無にかかわらず、皮膚病変治療、脱毛治療、皮膚引締め治療、挫瘡治療、刺青または色素沈着除去治療、皮膚表面再生を含む。モノポーラまたはバイポーラ皮膚治療エネルギを放射し、かつ装置800と共に使用することのできるケア装置は、Lumenis(商標)、Syneron(商標)、Alma(商標)、Thermage(商標)等によって製造されている。上述の通り、装置は治療、診断、および/または検査器具に堅固に固定し、かつ/または種々の独立した器具を案内するために使用することができる。そのような装置は、セッションを実行するために要求される努力および/または注意を低減させるために、かつ/またはこれらの実行セッションの精度を高めるために、既存の皮膚科ケア器具102に対する付加装置として使用することができる。
【0132】
次に図19を参照すると、それは、本発明の一部の実施形態に係る、すべすべした湿った皮膚のみならず乾燥した皮膚上でも様々な皮膚科ケア器具を案内するように適応された、多種多様なサイズおよび形状の着脱自在の断続的前進ローラを交換するための機構を持つ装置の略図である。装置1900は、前方または後方押し込み力方向Fに対して適切な摩擦をもたらすゴム製の着脱自在の車輪1901を支持するように設定される。ソレノイドは矩形の箱1902内に存在する一方、制動機構は、1903によって示されるように、矩形の箱の底部に位置する。制動機構は、車輪1901のシャフト1904から張り出して、電流がソレノイドに流れていないときにOFF状態でソレノイドに位置するばねによって下方に圧縮されるロッドと衝突する、球形ボールを利用する。ばね定数は、ボールがロッドと衝突したときに、たとえローラおよび治療装置がオペレータによって押されても、ローラの停止を確実にするのに充分に高いように選択した。他方、ばね定数は、制動器開放制御回路の誤作動が発生した場合のように、オペレータが停止機構を克服することを希望するときに、そうすることができるように充分に弱い。電流によりソレノイドが起動して制動器を解放するときと、車輪が巡回を完了したときに車輪をいつでも停止してよい状態であるという指標を受け取り、電流を停止することによってソレノイドが作動停止するときとの間の期間は、180ミリ秒となるように選択した。この期間は、押す手がインピーダンスの低下の感覚に反応してローラを移動させるのに充分長く、かつ手動オペレータが高速でローラを移動させるときに、皮膚上の正しい治療位置でローラの停止を確実にするのに充分短い。この期間をレーザまたはIPL閃光率のみならず個々のオペレータの反応時間に従って設定する能力は有利である。非限定的な例として、期間は約30ミリ秒から400ミリ秒の範囲内とすることができる。400ミリ秒の上限は、治療パルスを3秒毎に発射する低速EPLの場合、およびオペレータが例えば経験の欠如のため意図的に遅く操作することを希望する場合に、設定することができる。図19は、ローラ1900を市販の脱毛レーザの遠位部1906に帯掛けすることを可能にするアダプタ1905を示す。ソレノイドのみならず、その制御回路もまた、任意選択的に18VのDC電流源によって作動する。
【0133】
本発明の別の実施形態では、回路は、治療装置によって放出される治療光のパルスを検出し、かつそれに応答してソレノイドを作動停止させるように設定される。回路は、全治療中に治療装置によって放出されたパルス数の計数を可能にするカウンタを有する。この数は治療装置オペレータにとって関心事であり、オペレータが患者に料金を請求するのに役立つ。これは、ディスプレイのような指定されたマン・マシン・インタフェース(MMI)上に表示することができる。上述の通り、1つの着脱自在の車輪を別の車輪と交換することにより、使用される様々な皮膚科ケア器具に合わせて皮膚科ケアセッションを調整することが可能になる。この調整は、上述の通り、様々な照射率および作業領域を持つ様々な皮膚科ケア器具を使用することを容易にする。
【0134】
本出願から成熟する特許の存続期間の期間中には、多くの関連するシステムおよび方法が開発されることが予想され、皮膚科ケア器具、治療装置、診断装置、および検査装置の用語の範囲は、すべてのそのような新しい技術を先験的に包含することが意図される。
【0135】
本明細書中で使用される用語「約」は、±20%を示す。
【0136】
用語「含む/備える(comprises、comprising、includes、including)」、「有する(having)」、およびそれらの同根語は、「含むが、それらに限定されない(including but not limited to)」ことを意味する。この用語は、「からなる(consisting of)」および「から本質的になる(consisting essentially of)」を包含する。
【0137】
表現「から本質的になる」は、さらなる成分および/または工程が、特許請求される組成物または方法の基本的かつ新規な特徴を実質的に変化させない場合にだけ、組成物または方法がさらなる成分および/または工程を含み得ることを意味する。
【0138】
本明細書中で使用される場合、単数形態(「a」、「an」および「the」)は、文脈がそうでないことを明確に示さない限り、複数の参照物を包含する。例えば、用語「化合物(a compound)」または用語「少なくとも1つの化合物」は、その混合物を含めて、複数の化合物を包含し得る。
【0139】
用語「例示的」は、本明細書では「例(example,instance又はillustration)として作用する」ことを意味するために使用される。「例示的」として記載されたいかなる実施形態も必ずしも他の実施形態に対して好ましいもしくは有利なものとして解釈されたりかつ/または他の実施形態からの特徴の組み入れを除外するものではない。
【0140】
用語「任意選択的」は、本明細書では、「一部の実施形態に与えられるが、他の実施形態には与えられない」ことを意味するために使用される。本発明のいかなる特定の実施形態も対立しない限り複数の「任意選択的」な特徴を含むことができる。
【0141】
本開示を通して、本発明の様々な態様が範囲形式で提示され得る。範囲形式での記載は単に便宜上および簡潔化のためであり、本発明の範囲に対する柔軟性のない限定として解釈すべきでないことを理解しなければならない。従って、範囲の記載は、具体的に開示された可能なすべての部分範囲、ならびに、その範囲に含まれる個々の数値を有すると見なさなければならない。例えば、1〜6などの範囲の記載は、具体的に開示された部分範囲(例えば、1〜3、1〜4、1〜5、2〜4、2〜6、3〜6など)、ならびに、その範囲に含まれる個々の数値(例えば、1、2、3、4、5および6)を有すると見なさなければならない。このことは、範囲の広さにかかわらず、適用される。
【0142】
数値範囲が本明細書中で示される場合には常に、示された範囲に含まれる任意の言及された数字(分数または整数)を含むことが意味される。第1の示された数字および第2の示された数字「の範囲である/の間の範囲」という表現、および、第1の示された数字「から」第2の示された数「まで及ぶ/までの範囲」という表現は、交換可能に使用され、第1の示された数字と、第2の示された数字と、その間のすべての分数および整数とを含むことが意味される。
【0143】
明確にするため別個の実施形態の文脈で説明されている本発明の特定の特徴が、単一の実施形態に組み合わせて提供されることもできることは分かるであろう。逆に、簡潔にするため単一の実施形態で説明されている本発明の各種の特徴は別個にまたは適切なサブコンビネーションで、あるいは本発明の他の記載される実施形態において好適なように提供することもできる。種々の実施形態の文脈において記載される特定の特徴は、その実施形態がそれらの要素なしに動作不能である場合を除いては、それらの実施形態の不可欠な特徴であると見なされる
べきではない。
【0144】
本発明はその特定の実施態様によって説明してきたが、多くの別法、変更および変形があることは当業者には明らかであることは明白である。従って、本発明は、本願の請求項の精神と広い範囲の中に入るこのような別法、変更および変形すべてを包含するものである。
【0145】
本明細書で挙げた刊行物、特許および特許出願はすべて、個々の刊行物、特許および特許出願が各々あたかも具体的にかつ個々に引用提示されているのと同程度に、全体を本明細書に援用するものである。さらに、本願で引用または確認したことは本発明の先行技術として利用できるという自白とみなすべきではない。節の見出しが使用されている程度まで、それらは必ずしも限定であると解釈されるべきではない。
【技術分野】
【0001】
本発明は、その一部の実施形態では、大きい皮膚領域の治療の方法およびシステムに関し、さらに詳しくは、しかし排他的にではなく、美容および/または診断治療のような、大きい皮膚領域の治療のための装置および/またはプロセスを案内および/または制御する方法およびシステムに関する。
【背景技術】
【0002】
大きい皮膚領域の治療、検査、および/または診断プロセスの有効性、安全性、予測性および/または認容性を改善するために、方法論的走査パターンを採用しなければならない。そのようなパターンは、大きい皮膚領域の各部分に費やされる時間を略均等に分割し、治療セッションの重複を回避し、かつ/または平均治療セッションのタイムスパンを短縮することを可能にする。
【0003】
大きい皮膚領域の検査および/または診断プロセスの例として、ダーモスコープ検査、皮膚がん検査、および/または任意の他の皮膚科診断プロセスがある。大きい皮膚領域の治療の例として、RF源または光および超音波のような電磁波に基づく治療、例えば挫瘡治療、脱毛治療、日焼け治療、乾癬治療、皮膚引締め治療、色素性病変の治療、刺青、および/またはいずれかの他の組織の治療がある。
【0004】
最近の数年間に、様々な方法およびシステムが開発されてきた。例えば2003年2月4日に出願された米国特許第7282047号明細書は、治療エネルギを生成するように適応されかつ取付け構造に結合された少なくとも1つの治療エネルギ源と、取付け構造に接続されかつ取付け構造およびそれに結合されたエネルギ源を治療エネルギに曝露させようとする領域上で移動させるように適応された少なくとも1つの移動ユニットとを含む、治療エネルギ源を治療対象領域上で移動させるための装置を記載している。
【0005】
別の例は、レーザからのレーザ照射パルスを治療対象の皮膚の領域に送達するためのハンドピースを含むレーザ皮膚治療装置を記載した、1999年10月8日に出願された米国特許第6758845号明細書に記載されている。治療対象領域は、レーザの1回の発射で治療可能な領域より大きい。大きい領域は、大きい領域内の隣接サブ領域をレーザの繰返し発射によって治療することによって治療される。レーザは、大きい領域内のハンドピースの位置に応じて自動的に発射される。ハンドピースの位置を決定するための幾つかの装置が開示されている。これらは、治療対照の皮膚に描かれた印のハンドピースによる光学的検出、ハンドピース用の別個のガイド上またはハンドピースに取り付けられたローラ上の印の光学的、磁気的、または機械的検出、およびハンドピース内のトランスポンダから固定基準面への信号の移動時間を決定することによる検出を含む。
【発明の概要】
【0006】
本発明の一部の実施形態では、複数の皮膚領域における皮膚科ケアプロセスを案内する装置を提供する。該装置は、皮膚科ケア器具が各々皮膚領域の複数の皮膚サブ領域の1つで複数の皮膚科ケアセッションを断続的に実行する間、皮膚領域上の皮膚科ケア器具の駆動を支持するキャリアと、駆動中に複数の皮膚サブ領域のうちの第1サブ領域から複数の皮膚サブ領域のうちの第2サブ領域へのキャリアの移動を調整する制動ユニットとを備える。
【0007】
任意選択的に、皮膚科ケア器具は、ハンドヘルドエピスコープ、画像センサ、カメラ、ビデオカメラ、触覚治療器具、電磁エネルギ(EM)トランスミッタ、そのようなEMパルスの導管、超音波トランスミッタ、超短パルス光(IPL)脱毛器、およびレーザ器具から成る群から選択される。
【0008】
さらに任意選択的に、皮膚科ケア器具は、前記群のいずれかの構成員のヘッドおよびハンドピースの少なくとも1つである。
【0009】
任意選択的に、駆動は人間オペレータによって手動で起動され、制動ユニットは駆動への抵抗を変化させることによって移動を調整する。
【0010】
任意選択的に、キャリアは、複数の異なる皮膚科ケア器具を着脱自在にかつ交代で支持するための大きさおよび形状に作られる。
【0011】
任意選択的に、該装置は、各皮膚科ケアセッションの開始および終了の少なくとも1つを検出する検出器をさらに備え、制動ユニットは検出に従って移動を調整する。
【0012】
さらに任意選択的に、皮膚科ケア器具は、少なくとも1つの光パルスを放射することによって各皮膚科ケアセッションを実行し、検出器は、少なくとも1つのパルスを検出することによって、各皮膚科ケアセッションの開始および終了の少なくとも1つを検出する光検出器である。
【0013】
任意選択的に、皮膚領域は、肢体の皮膚領域の少なくとも60%、腹部の皮膚領域の少なくとも60%、背中の皮膚領域の少なくとも60%から成る群の構成員である。
【0014】
任意選択的に、制動ユニットは、キャリアに動作可能に接続されかつ移動中に回転するように適応された少なくとも1つの車輪と、移動中に少なくとも1つの車輪の回転自由を抑制する少なくとも1つの車輪制動器とを含む。
【0015】
任意選択的に、該装置は、キャリアが皮膚領域上を移動した距離を示す移動追跡器をさらに備える。制動ユニットは距離に応じて移動を調整する。
【0016】
さらに任意選択的に、少なくとも1つの車輪制動器は、車輪に接続された少なくとも1つの車輪板と可動板とを含み、少なくとも1つの車輪制動器は、移動中に可動板を動かして少なくとも1つの車輪板と衝突させることによって、回転自由を抑制する。
【0017】
さらに任意選択的に、少なくとも1つの車輪制動器は、車輪のリムの内側に接続された少なくとも1つの車輪板と、車輪のシャフトに接続された可動要素とを含み、少なくとも1つの車輪制動器は、移動中に可動要素を動かして少なくとも1つの車輪板と衝突させることによって、回転自由を抑制する。
【0018】
さらに任意選択的に、少なくとも1つの車輪制動器は、車輪に接続された少なくとも1つの車輪板と、キャリアに接続されたフレーム板とを含み、板は、移動中に相互に衝突しかつ板の少なくとも1つを屈曲させるように配置され、屈曲は移動を制約する。
【0019】
さらに任意選択的に、少なくとも1つの車輪制動器は、例えば凹部から張り出すばねによって線形的に作動する少なくとも1つの球状要素を含む。そのような方法で、球状要素は、車輪の移動中に車輪上のバーと衝突して装置の移動を抑制するように断続的に配置される。
【0020】
任意選択的に、該装置は、オペレータが手動で移動を実行するようにキャリアを駆動させることを可能にするハンドルをさらに備える。
【0021】
任意選択的に、該装置は、移動中にオペレータの腕を装置に対して固定する手固定要素をさらに備える。
【0022】
任意選択的に、該装置は、複数の皮膚科ケアセッションのパターンを学習するための学習モジュールをさらに備え、制動ユニットはパターンに応じて調整を実行する。
【0023】
任意選択的に、皮膚科ケア器具は画像センサおよび閃光装置を含み、制動ユニットは、皮膚科ケア器具が複数の皮膚サブ領域の1つの上にあるときに閃光装置が閃光するように、移動を調整する。
【0024】
任意選択的に、該装置は、閃光を検出する光検出器をさらに備え、制動ユニットは検出に応じて移動を調整する。
【0025】
任意選択的に、キャリアは皮膚科ケア器具の構成要素を含む筐体である。
【0026】
任意選択的に、移動は2次元で実行される。
【0027】
任意選択的に、該装置は、皮膚科ケア器具をキャリアに把持するための帯掛け機構をさらに備える。
【0028】
任意選択的に、帯掛け機構は柔軟層を有するセグメント化ブレスレットを含み、セグメント化ブレスレットが器具を把持したときに柔軟層は圧縮される。
【0029】
任意選択的に、キャリアは皮膚領域と接触する。
【0030】
本発明の一部の実施形態では、皮膚科ケアプロセスを案内する方法を提供する。該方法は、制動ユニットを有するキャリア内に皮膚科ケア器具を装着するステップと、皮膚領域上での皮膚科ケア器具の駆動を支持するためにキャリアを使用しながら、複数の皮膚科ケアセッションを各々、皮膚領域の複数の皮膚サブ領域の1つで断続的に実行するステップと、複数の皮膚サブ領域の1つから別の1つへの皮膚領域上のキャリアの移動を自動的に調整するように制動ユニットを操作するステップとを含む。
【0031】
任意選択的に、駆動は人間オペレータによって手動で起動され、操作は駆動に対する抵抗を変化させることを含む。
【0032】
任意選択的に、皮膚領域は、患者の肢体、腹部、および背中から成る群の構成員の少なくとも60%に及ぶ。
【0033】
さらに任意選択的に、該方法は、各ケアセッションで皮膚の複数のサブ領域の1つの画像を取得するステップをさらに含む。
【0034】
さらに任意選択的に、該方法は、各ケアセッションで複数の皮膚サブ領域の異なるサブ領域に電磁(EM)パルスを放出するステップをさらに含む。
【0035】
任意選択的に、EMパルスは、パルス・レーザ・ビーム、赤外光パルス、超音波パルスから成る群から選択される。
【0036】
さらに任意選択的に、該方法は、各ケアセッションで複数の皮膚サブ領域の異なるサブ領域に触覚刺激を加えるステップをさらに含む。
【0037】
さらに任意選択的に、該方法は、移動中に各皮膚科ケアセッションの開始および終了の少なくとも1つを検出するステップをさらに含み、操作は検出に応じて実行される。
【0038】
任意選択的に、調整は、移動中にキャリアが移動した距離に応じて実行される。
【0039】
さらに任意選択的に、該方法は、複数の皮膚科ケアセッションのレートを学習するステップと、レートに応じて制動ユニットを操作するステップとをさらに含む。
【0040】
本発明の一部の実施形態では、皮膚科ケアプロセスを案内する方法を提供する。該方法は、患者の皮膚領域上で皮膚科ケア器具の駆動を支持するステップと、皮膚科ケア器具によって断続的に放出される複数の電磁パルスを少なくとも1つの光検出器によって自動的に検出するステップと、複数の電磁パルスに応じて制動ユニットを操作して駆動を調整するステップとを含む。
【0041】
任意選択的に、光検出器は皮膚科ケア器具に外付けされる。
【0042】
さらに任意選択的に、該方法は、駆動中に皮膚領域の複数のサブ領域の複数の画像を取得するステップと、複数の画像を診断のために出力するステップとをさらに含む。
【0043】
さらに任意選択的に、該方法は、駆動前に皮膚領域の初期位置に印を付けるステップと、各画像が実質的に同一サブ領域のそれぞれの追加画像を有するように複数の追加画像を取得するべく、該方法に対応する方法で追加駆動を実行するために初期位置を使用するステップとをさらに含む。
【0044】
さらに任意選択的に、該方法は、後期に皮膚領域上での皮膚科ケア器具の第2駆動を支持するステップと、皮膚科ケア器具によって断続的に放射される複数の追加電磁パルスを少なくとも1つの光検出器によって自動的に検出するステップと、複数の追加電磁パルスに応じて制動ユニットを操作して駆動を調整し、追加駆動中に複数のサブ領域の複数の追加画像を取得し、複数の画像および複数の追加画像を同時に提示するステップとをさらに含む。
【0045】
任意選択的に、制動ユニットは皮膚科ケア器具に外付けされる。
【0046】
本発明の一部の実施形態では、複数の皮膚領域における皮膚科ケアプロセスを案内する方法を提供する。該方法は、皮膚科ケア器具が複数の皮膚科ケアセッションを実行している間、患者の皮膚領域上で皮膚科ケア器具の駆動を支持するステップと、駆動中に皮膚科ケア器具が移動する距離を自動的に推定するステップと、距離に応じて駆動を調整するように制動ユニットを操作するステップとを含む。
【0047】
別途定義されない限り、本明細書で使用されるすべての技術的用語および/または科学的用語は、本発明が属する技術分野の当業者によって一般に理解されるのと同じ意味を有する。本明細書に記載される方法および材料と類似または同等である方法および材料を本発明の実施または試験において使用することができるが、例示的な方法および/または材料が下記に記載される。矛盾する場合には、定義を含めて、本特許明細書が優先する。加えて、材料、方法および実施例は例示にすぎず、限定であることは意図されない。
【0048】
本発明の実施形態の方法および/またはシステムを実行することは、選択されたタスクを、手動操作で、自動的にまたはそれらを組み合わせて実行または完了することを含んでいる。さらに、本発明の装置、方法および/またはシステムの実施形態の実際の機器や装置によって、いくつもの選択されたステップを、ハードウェア、ソフトウェア、またはファームウェア、あるいはオペレーティングシステムを用いるそれらの組合せによって実行できる。
【0049】
例えば、本発明の実施形態による選択されたタスクを実行するためのハードウェアは、チップまたは回路として実施されることができる。ソフトウェアとして、本発明の実施形態により選択されたタスクは、コンピュータが適切なオペレーティングシステムを使って実行する複数のソフトウェアの命令のようなソフトウェアとして実施されることができる。本発明の例示的な実施形態において、本明細書に記載される方法および/またはシステムの例示的な実施形態による1つ以上のタスクは、データプロセッサ、例えば複数の命令を実行する計算プラットフォームで実行される。任意選択的に、データプロセッサは、命令および/またはデータを格納するための揮発性メモリ、および/または、命令および/またはデータを格納するための不揮発性記憶装置(例えば、磁気ハードディスク、および/または取り外し可能な記録媒体)を含む。任意選択的に、ネットワーク接続もさらに提供される。ディスプレイおよび/またはユーザ入力装置(例えば、キーボードまたはマウス)も、任意選択的にさらに提供される。
【図面の簡単な説明】
【0050】
本明細書では本発明のいくつかの実施形態を単に例示し添付の図面を参照して説明する。特に詳細に図面を参照して、示されている詳細が例示として本発明の実施形態を例示考察することだけを目的としていることを強調するものである。この点について、図面について行う説明によって、本発明の実施形態を実施する方法は当業者には明らかになるであろう。
【0051】
【図1】図1は、本発明の一部の実施形態に係る、大きい皮膚領域を検査、診断、および/または治療するために複数領域の皮膚科ケアプロセスを実行する皮膚科ケア器具を案内する装置の略図である。
【0052】
【図2A−2B】図2Aは、本発明の一部の実施形態に係る、複数領域の皮膚科ケアプロセスを案内する方法のフローチャートである。図2Bは、本発明の一部の実施形態に係る、複数領域の皮膚科ケアプロセスを実行するために皮膚科ケア器具を支持するキャリアを案内する方法のフローチャートである。
【0053】
【図3A】図3Aは、本発明の一部の実施形態に係る、オペレータが手動で操縦するように、例えば押動するように、設計された装置の略図である。
【0054】
【図3B】図3Bは、本発明の一部の実施形態に係る、図3Aに示した装置を使用して皮膚科ケア器具を手動で滑走させるオペレータの略図である。
【0055】
【図4A−4C】図4Aは、本発明の一部の実施形態に係る、光検出器に接続された制動ユニットの略図である。図4Bは、本発明の一部の実施形態に係る、光検出器に接続された制動ユニットの略図である。図4Cは、本発明の一部の実施形態に係る、光検出器に接続された制動ユニットの略図である。
【0056】
【図5】図5は、本発明の一部の実施形態に係る、光検出器によって検出される繰返しの照射と同期した車輪制動ユニットの板の繰返しの解放を示すグラフである。
【0057】
【図6】図6は、本発明の一部の実施形態に係る、パルス光が放射されたときに板の解放を可能にする回路の略図である。
【0058】
【図7】図7は、本発明の一部の実施形態に係る、大きい皮膚領域に沿った装置の断続的前進を示す略図である。
【0059】
【図8】図8は、本発明の一部の実施形態に係る、パルス・レーザ・ビームのような光ビームの監視された放射に応じて複数領域の皮膚科ケアプロセスを案内するための例示的装置の略図である。
【0060】
【図9】図9は、本発明の一部の実施形態に係る、装置に対してオペレータの手を固定する帯掛け機構に物理的に接続されたキャリア付き装置の略図である。
【0061】
【図10A−10B】図10Aは、本発明の一部の実施形態に係る、屈曲角度θを有する回転延長体を持つ例示的車輪の略図である。図10Bは、本発明の一部の実施形態に係る、図10Aに例示した屈曲角度に応答して車輪に加えられる抵抗を示す例示的グラフである。
【0062】
【図11A−11B】図11Aは、本発明の一部の実施形態に係る、皮膚科ケア器具の移動を調整するために、板の代わりにボールが使用される制動ユニットの略図である。図11Bは、本発明の一部の実施形態に係る、例示的車輪および例示的制動ユニットの例示的シャフトの略図である。
【0063】
【図12】図12は、本発明の一部の実施形態に係る、車輪が完全に1回転するごとに複数回、フレーム延長体と衝突するように複数の延長体が車輪に取り付けられた制動ユニットの略図である。
【0064】
【図13】図13は、本発明の一部の実施形態に係る、湿った皮膚またはすべすべした皮膚上の皮膚科ケア器具の移動を調整するための、歯付き車輪を有する制動ユニットの略図である。
【0065】
【図14】図14は、本発明の一部の実施形態に係る制動ユニットを示す略図である。
【0066】
【図15A−15B】図15Aは、本発明の一部の実施形態に係る、源の二次元の移動を調整するように適応された装置の略図である。図15Bは、本発明の一部の実施形態に係る、源の二次元の移動を調整するように適応された装置の略図である。
【0067】
【図16】図16は、本発明の一部の実施形態に係る、色素性病変を診断するための装置の略図である。
【0068】
【図17A−17B】図17Aは、本発明の一部の実施形態に係る、胴体および図16に示す装置によって順次撮像される1組の近接皮膚サブ領域の略図である。図17Bは、本発明の一部の実施形態に係る、胴体および図17Aとは異なる期間に図16に示す装置によって順次撮像される1組の近接皮膚サブ領域の略図である。
【0069】
【図18】図18は、本発明の一部の実施形態に係る、種々の皮膚科ケア器具を固定するための帯掛け機構の略図である。
【0070】
【図19】図19は、本発明の一部の実施形態に係る、すべすべした湿った皮膚のみならず乾燥した皮膚上でも様々な皮膚科ケア器具を案内するように適応された、多種多様な大きさおよび形状の着脱自在の断続的前進ローラを交換するための機構を持つ装置の略図である。
【発明を実施するための形態】
【0071】
本発明は、その一部の実施形態では、大きい皮膚領域の治療の方法およびシステムに関し、さらに詳しくは、しかし排他的にではなく、美容および/または診断治療のような、大きい皮膚領域の治療のための装置および/またはプロセスを案内および/または制御する方法およびシステムに関する。
【0072】
本発明の一部の実施形態では、肢体、背中、および腹部のような大きい皮膚領域で実行される複数領域の皮膚科ケアプロセスを、大きい皮膚領域上の皮膚科ケア器具の駆動を調整するために制動ユニットを使用することによって、案内するための方法および装置を提供する。皮膚科ケア器具は、脱毛システムまたは任意の他の皮膚科ケアシステムの一般的なハンドピース、および/または診断用の色素性病変の画像を取得するために使用されるカメラとすることができる。皮膚科ケア器具は、手動で例えば皮膚科ケア器具を保持する人間オペレータによって駆動するか、あるいは自動的に例えばロボットアームによって駆動することができる。
【0073】
該装置は、皮膚科ケア器具が複数の皮膚科ケアセッションを各々、皮膚領域のサブ領域の1つで断続的に実行する間、皮膚領域上の皮膚科ケア器具の手動または自動的駆動を支持するキャリアを含む。キャリアは、特定の皮膚科ケア器具を支持する大きさおよび形状にすることができ、かつ/またはキャリアが複数の異なる皮膚科ケア器具を支持することを可能にする調整可能な要素を含むことができる。皮膚科ケアセッションは、サブ領域に電磁(EM)放射線、例えば超短パルス光(IPL)ビーム、レーザビームが照射される脱毛セッション、またはIPL、レーザ、紫外光源、または高周波モノポーラもしくはバイポーラ治療電流および/もしくは超音波による他の皮膚治療セッションとすることができる。別の実施例では、皮膚科ケアセッションは、サブ領域の画像が診断のために撮影され、かつ/または医師または別の介護者の実時間検査のために表示される診断セッションとすることができる。該装置は、任意選択的に互いに接触している皮膚サブ領域間のキャリアの移動を調整する制動ユニットをさらに含む。そのようにして、制動ユニットは、プロセスのペーシングを助け、かつサブ領域の重複治療または治療すべき領域の不用意な飛越しを回避することによる皮膚領域の過剰治療の回避を助ける。そのような調整は、オペレータが複数領域の治療プロセスに注ぐように要求される注意および/または努力の量を軽減させる。
【0074】
該装置は、皮膚科ケア器具の操作方法を制御および/または変更することなく、皮膚科ケア器具からの信号に応じて制動機構(解除)を操作するユニットとしてみることができることに注目すべきである。そのような実施形態では、装置のキャリアは、装置がなんら調整することなくあるいは皮膚科ケア器具と統合することなく機能するように、事実上どんな皮膚科ケア器具も支持するように設定される。これは、患者の身体上の場所および/または位置を監視し、かつ特定の皮膚科ケア器具に特定のトリガ信号を送信して照射サイクルをトリガすることによって、特定の皮膚科ケア器具を制御するように設定される、公知の装置に特定的な断続的前進装置とは異なる。
【0075】
任意選択的に、該装置は、皮膚科ケアセッションの実行、開始、および/または終了を検出するための検出器を含む。そのような実施形態では、制動ユニットは、ケア器具が皮膚科ケアセッションを実行するペースに応じて、皮膚科ケア器具の駆動を調整する。例えば検出器は、皮膚科ケアセッションが実行されたことを示す光を皮膚科ケア器具が皮膚領域に向かって放出したときに、それを検出する光検出器とすることができ、該装置は、複数領域の皮膚科ケアプロセスを続行するために、別の皮膚サブ領域上に再配置する必要がある。
【0076】
加えて、または代替的に、該装置は、キャリア101が皮膚領域上で、例えば1つの皮膚サブ領域の中心から別の皮膚サブ領域に、予め選択された距離より大きい距離を移動することを防止するかまたは難しくする機械的および/または電子的移動組立体を含む。そのような実施形態では、制動ユニットは移動追跡器に従ってキャリアの移動を調整する。例示的な機械的移動停止機構は、装置の駆動中に回転する車輪の回転内の張出し要素に基づくことができる。
【0077】
本発明の一部の実施形態では、皮膚領域上を移動した皮膚科ケア器具の距離に応じて、皮膚科複数領域ケア治療を案内する方法を提供する。該方法は、例えば上で概説しかつ下に記載するように皮膚科ケア器具が複数の皮膚科ケアセッションを実行する間、患者の皮膚領域上の皮膚科ケア器具の駆動を支持することに基づく。この支持は、例えば移動インジケータを使用し、かつ距離に応じて駆動を調整するように制動ユニットを操作することによって、駆動中に皮膚科ケア器具が移動した距離を自動的に推定することを可能にする。
【0078】
本発明の一部の実施形態では、皮膚科ケアセッションの実行中に放射される電磁パルスの検出に応じて、複数領域の皮膚科ケアプロセスを案内する方法を提供する。該方法は、患者の皮膚領域上の皮膚科ケア器具の駆動を支持すること、皮膚科ケア器具によって断続的に放射される複数の電磁パルスを、治療光の散乱部分を検出する光検出器のような少なくとも1つの電磁放射検出器によって自動的に検出すること、および電磁パルスに応じて制動ユニットを操作して駆動を調整することに基づく。
【0079】
本発明の一部の実施形態では、装置100は、診断または治療装置の断続的前進を調整するものであって、治療および/または診断器具を制御または作動させるものではなく、むしろ治療および/または診断器具の操作によって制御および/または作動される。該装置は、制動ユニット104が皮膚領域上の装置200の駆動に対する抵抗を変化させるにつれて、治療領域上での診断および/または治療器具の操縦を制御する。抵抗の変化は、治療パルスが器具によって放射されるまで待つようにオペレータに指示かつ/または強制し、次いで別の皮膚サブ領域に器具を駆動するようにオペレータに指示かつ/または許可する。その結果、装置は、異なる動作パターン、プログラム、および/またはハードウェアを持つ種々の器具を案内するために使用することができる。
【0080】
本発明の少なくとも1つの実施形態を詳しく説明する前に、本発明は、その適用において、下記の説明に示されるか、および/または図面および/または実施例において例示される構成要素および/または方法の組み立ておよび構成の細部に必ずしも限定されないことを理解しなければならない。本発明は他の実施形態が可能であり、または様々な方法で実施または実行されることが可能である。
【0081】
ここで図1を参照すると、それは、本発明の一部の実施形態に係る、患者の背中、腹部、および/または肢体のような大きい皮膚領域99を検査、診断、および/または治療するために、複数領域の皮膚科ケアプロセスを実行する皮膚科ケア器具を案内する装置100の略図である。本書で使用する場合、複数領域の皮膚科ケアプロセスとは、患者の背中、腹部、および/または肢体のような大きい皮膚領域の複数の皮膚サブ領域が断続的に治療、検査、および/または診断される複数のセッションに基づく治療、検査、および/または診断プロセスである。
【0082】
装置100は、皮膚科ケアセッションを実行する皮膚科ケア器具102および/またはそのような装置のヘッドを着脱自在に支持するキャリア101を含む。任意選択的に、キャリア101は、複数領域の皮膚科ケア器具またはそのヘッド102を調節可能に締着、支持、および/または別の方式で取り付ける帯掛けベルトである。複数領域の皮膚科ケア器具102のヘッドは、治療および/または診断ヘッドのハンドピース、または手動でかつ/または自動的に操縦するように調整されたリードとすることができる。複数領域の皮膚科ケア器具102は、ハンドヘルドエピスコープ、ダーモスコープ、および/または画像センサ、例えば相補型金属酸化膜半導体(CMOS)ベースの検出器および/または皮膚部分の画像を取得するように適応された電荷結合装置(CCD)ベースの検出器、カメラ、ビデオカメラ、触覚治療器具、臨床用に皮膚に送達されるエネルギのパルスを生成するための電磁エネルギ(EM)トランスミッタ、またはヘッドもしくはそのようなパルスの導管のリードとすることができる。例えばEMトランスミッタは、皮膚に超音波を放射する超音波トランスミッタ、超短パルス光(IPL)脱毛器、およびパルス・レーザ・ビームを放出するためのレーザ源、例えばダイオード・レーザ・アレイ、または任意の他の治療用エネルギ源である。簡潔を期して、複数領域の皮膚科ケア器具102とは上述の装置または装置ヘッドの1つ以上を意味する。複数領域の皮膚科ケア器具102は、例えば98で示すように、治療、検査、および/または診断される大きい皮膚領域99の皮膚サブ領域で各皮膚科ケアセッションを実行するように設計される。
【0083】
任意選択的に、皮膚科ケアセッションは、皮膚サブ領域98でフォトトリコリシス(phototricholysis)または光脱毛を実行するためにフルスペクトル光を放射することを含む、IPL脱毛器の脱毛セッションである。任意選択的に、皮膚科ケアセッションは、そこに撮像された色素性病変を診断するため、または癌性病理が疑われる皮膚の状態を診断するために、皮膚サブ領域98の画像を捕捉することを含む。任意選択的に、皮膚科ケアセッションは検査セッションであり、複数領域の皮膚科ケア器具102は、医師または別の介護者の診断のために皮膚サブ領域98の画像を投影する、ハンドヘルドエピスコープおよび/またはダーモスコープである。
【0084】
複数領域の皮膚科ケア器具102は皮膚科ケアセッションを繰返し実行し、そこで患者の背中、腹部、および/または肢体の少なくとも60%、任意選択的にこれらの領域の少なくとも80%、例えばこれらの領域の約100%のような大きい皮膚領域を検査、診断、および/または治療するために、複数のケアセッションが行なわれる。複数領域の皮膚科ケア器具102を大きい皮膚領域99で操縦中に、例えば大きい皮膚領域99の皮膚サブ領域の画像を捕捉することができ、かつ/または1つ以上のパルス・レーザ・ビームおよび/または超音波のようなEM波を、そのような皮膚サブ領域に放射することができる。本書で使用する場合、大きい皮膚領域でとは、その皮膚サブ領域を検査、治療、および/または診断するために、複数領域の皮膚科ケア器具102が大きい皮膚領域99に接触しているか、あるいは大きい皮膚領域の上に配置されているときを意味する。
【0085】
1つの皮膚サブ領域で、または重複する皮膚セグメント上で複数のセッションを実行すると、患者を冗長放射に曝露させ、かつ/または複数領域のプロセス時間を増大させ、好ましくない。
【0086】
装置100は、キャリア101および複数領域の皮膚科ケア器具102の大きい皮膚領域99での移動、例えば1つの皮膚サブ領域から別のサブ領域への、例えば皮膚サブ領域98から皮膚サブ領域97への移動を調整する制動ユニット104をさらに含む。そのようにして、皮膚科ケア器具102、例えばレーザ脱毛システムのハンドピースまたは皮膚病変診断システムの画像センサによって治療、診断、または検査される領域における重複を低減または排除することができ、かつ大きい皮膚領域99を検査、治療、または診断するためにかかる時間が短縮される。調整は、皮膚科ケアプロセスの実施、作動、および/もしくは操作、ならびに/または大きい皮膚領域上での装置100の移動を監視することによって実行される。調整は、皮膚の色または形状の結果として、かつ/または皮膚科ケアプロセスの実施および/もしくは操作ならびに/または移動に対する皮膚の反応の結果として実行されるものではないことに注目すべきである。
【0087】
任意選択的に、制動ユニット104は、皮膚科ケアセッションの実行中にではなく、皮膚科ケアセッションとセッションの合間に、皮膚サブ領域から近接皮膚サブ領域へ自動的にかつ/または手動で駆動される。
【0088】
加えて、または代替的に、制動ユニット104は、皮膚科ケアセッション中、または例えばその始動の約0.1秒、0.5秒、1秒、2秒、4秒、8秒、および15秒前の期間中に、1つ以上の移動要素を抑制することによって、キャリア101の移動を調整する。
【0089】
例えば、図1に示すように、制動ユニット104は、車輪105を含む。しかし、制動ユニット104は、キャリア101に動作可能に接続されかつキャリアが患者の皮膚上を移動するときに回転または転動するように適応された、複数の車輪、1つ以上のローラ、および/またはボールを含むことがある。そのような実施形態では、制動ユニット104は、検出器の出力に応じて1つ以上の車輪、ローラ、および/またはボールの回転または転動自由を抑制する1つ以上の車輪制動器をさらに含む。例えば、制動ユニット104は、102の性能の検出器の出力に応じて、1つ以上の車輪、ローラ、および/またはボールの回転または転動を部分的にまたは完全に抑制することができる。そのような抑制は、皮膚領域上の装置200の駆動に対する抵抗を変化させる。
【0090】
装置100は、皮膚科ケア器具102に、例えば脱毛システムのヘッド、または手動もしくは自動診断のために病変の画像を取得するために使用されるカメラに、一体的に形成することができることに注目すべきである。そのような実施形態では、キャリア101は、皮膚科ケア器具102および装置100の構成要素を含むかまたはそれらに取り付けられた筐体に置き換えることができる。
【0091】
ここで図2Aをも参照すると、それは、本発明の一部の実施形態に従って、複数領域の皮膚科ケアプロセスを案内する方法のフローチャートである。該方法は、装置100が皮膚領域99上を案内されるペース、および/または装置の速度を案内することを可能にする。
【0092】
最初に、201に示す通り、皮膚科ケア器具102はキャリア101に配置される。任意選択的に、オペレータは、それに利用できる複数の可能な皮膚科ケア器具102から皮膚科ケア器具102を選択する。例えば複数領域のプロセスが大きい皮膚領域の脱毛プロセスである場合、脱毛器ヘッドがキャリアに装着される。別の実施形態では、オペレータは、色素性病変の診断のために1つ以上の画像センサを含む皮膚科ケア器具を装着することができる。任意選択的に、キャリア101は、1つ以上の調整可能なストラップおよび/またはバンドの周長を変更することによって、皮膚科ケア器具102に取り付けられる。
【0093】
次に、202に示す通り、皮膚科ケア器具が複数領域のプロセスを各々、大きい皮膚領域の複数の皮膚サブ領域の1つで実行する間、皮膚科ケア器具102付きのキャリア101は、大きい皮膚領域上を駆動、例えば滑走される。
【0094】
本発明の一部の実施形態では、キャリア101および皮膚科ケア器具102はオペレータによって手動で操縦され、例えば押動される。例えば、図3Aに示す通り、オペレータは患者の皮膚99上の経路に沿って皮膚科ケア器具102を駆動することができる。任意選択的に、図3Aに描かれたキャリア101および車輪219は、中心軸121を中心に皮膚科ケア器具102を回転させる。キャリア101は、中心軸121の助けにより患者の皮膚上での方向の漸次変更を可能にしかつ/またはその向きを特定の軌道に制限しながら、支持された皮膚科ケア器具102を、車輪219の面と平行な線に沿った方向に駆動させることができる。そのような制限は、1つ以上の車輪、ローラ、および/またはボールの回転および/または回動を1つ以上の方向に固定することによって適用することができる。
【0095】
本発明の一部の実施形態では、皮膚科ケア器具102付きキャリア101は、それに動作可能に取り付けられた、例えばロボットハンドおよび/または作動手段、例えば1組の車輪等によって、自動的に操縦される。
【0096】
患者の皮膚上での皮膚科ケア器具102の駆動中に、例えば上述したように、複数の皮膚科ケアセッションが実行される。
【0097】
203に示す通り、キャリア101の移動および/または皮膚科ケアプロセスの実行は、皮膚上でのキャリアの作動中に監視される。この監視は、皮膚の色および/もしくは形状ならびに/またはセッションに対する皮膚の反応に応じてではなく、その実際の動作および/または作動に応じて、皮膚領域上での皮膚科ケア器具の駆動の調整を可能にする。
【0098】
したがって、204に示す通り、複数領域の皮膚科プロセス中に、皮膚サブ領域の1つから別の1つへの皮膚領域上でのキャリア101の移動が調整され、移動の停止により終了し、次のケアの実行を受動的に待つ。
【0099】
ここで、図2Bをも参照すると、それは、本発明の一部の実施形態に従って、複数領域の皮膚科ケアプロセスを実行するべく、102のような皮膚科ケア器具を支持する101のようなキャリアを案内する方法210のフローチャートである。ブロック201は上述の通りである。次いで、212に示す通り、キャリア101は、キャリアによって、例えば制動ユニット104によって加えられる抵抗が増大するまで、皮膚のサブ領域上を駆動される。任意選択的に、増大した抵抗はキャリアを停止させる。次に、213に示す通り、ケアセッションは、駆動される皮膚科ケア器具102によって自律的に実行される。次に、214に示す通り、キャリア101によって加えられる抵抗は変化して、皮膚科ケア器具102を隣接サブ領域へ駆動させ、複数領域の皮膚科ケアプロセスを続行することを可能にする。
【0100】
本発明の一部の実施形態では、装置100は、皮膚科ケアセッションの開始、皮膚科ケアセッションの終了、および/または皮膚科ケアセッションの合間を検出する、本書で検出器103と呼ばれる1つ以上の検出器をさらに含む。例えば、検出器103は、そのようなEM波の放出および/またはそのようなEM波の放出の欠如を検出するように調整される。検出器103は、例えば脱毛セッション中に皮膚サブ領域から反射した光を測定することによって、皮膚サブ領域の照射を検出するように適応された光検出器とすることができる。
【0101】
例えば、次に図4A〜4Cを参照すると、それらは、本発明の一部の実施形態に係る、光検出器103に接続された制動ユニット104の一連の略図である。制動ユニット104は、図1の101に示す通り、キャリア101に接続されるように設計される。上述と同様に、制動ユニット104の車輪105は、皮膚科ケア器具102が皮膚領域上で駆動されるときに、皮膚領域と接触する。制動ユニット104は、キャリア101の移動軌道に垂直な軸内で上昇しかつ下降するように適応された第1板134と、車輪105に取り付けられた第2板133とを有する車輪制動器を含む。板133、134は、例えば図4Aに示すように第1板134が下降したときに、第2板133が第1板134と衝突するように共通面内に配置される。任意選択的に、電磁石172のソレノイドに電流が流れたときに、板134は電磁石172によって上昇される。現在の実施形態で使用することのできるソレノイドの例として、NSF Controls,UKによって製造されたチューブ状ソレノイド型式SDT1327L−2XXがあり、その仕様書を参照によって本書に援用する。任意選択的に光検出器組立体である検出器103が、皮膚ケア治療または診断の自律的実行の結果発生する光114を検出すると、電池のような電源からの電流を電磁石172に流れさせる回路が閉じ、電磁石は、図4Bに示すように、任意選択的に磁石である板134を上昇させて、車輪105が自由に回転することを可能にする。このプロセスは数ミリ秒しかかからない。上昇から予め定められた時間後に、回路は開き、図4Cに示すように、板134は任意選択的に重力によって下降する。これは2分の1秒、例えば約150〜200ミリ秒しかかからない。このプロセスは、例えば検出器によって検出される繰返し照射14と同期する板134の繰返し解放を示すグラフである図5に示すように、検出器103が照射を検出するたびに繰り返すことができる。
【0102】
自律とは、装置100またはその中に具現された何らかのセンサからのコマンド、指示、測定、および/または命令無しに、皮膚科ケア器具102によって実行される皮膚科ケア動作に関連することに注目すべきである。
【0103】
任意選択的に、板133は柔軟であり、板134が下がっているときでも、オペレータが装置100を動かすことが可能である。この実施形態は、故障の場合にオペレータが装置100を操縦し、特定の皮膚サブ領域の火傷を回避することを可能にする。
【0104】
図6は、パルス光114が放射されたときに、板134が解放されることを可能にする回路の略図である。同様の回路は、光検出によってトリガされる他の制動システムに使用することができる。該回路は、フォトダイオード91が光を検出したときに、電池93または他の電源からの電流iを電磁石172に流れさせる。光が検出されないときは、電流の流れは阻止され、板134は下降する。任意選択的に、板134は希土類金属から作られる。
【0105】
任意選択的に、各皮膚科ケアセッションは、レーザビーム光放射のような1回以上の光放射を含む。そのような実施形態では、支持された皮膚科ケア器具102は、パルス・レーザ・ビームを放射するために、超短パルス光(IPL)脱毛器および/またはレーザ源、例えばダイオード・レーザ・アレイを含むことができる。そのような実施形態では、検出器103は、光源の励起を検出する光検出器を含む。図7は、大きい皮膚領域に沿った装置100の断続的前進を概略的に示す。光パルス114はT秒毎に検出器103によって繰返し検出される。制動ユニット104は、検出された光パルス114に応じて、例えば1回以上の光放射のセッションが検出された後で低い機械的インピーダンスが加えられ、ケア/診断セッションの終了時にキャリア101の自由移動が可能になる一方、キャリア101が領域98または97の端に達すると、高い機械的インピーダンスが加えられ、その結果移動が停止するように、車輪制動器を作動させることによって、キャリア101の移動を調整する。
【0106】
任意選択的に、制動ユニット104は、検出器103によって記録される1回以上のセッションに応じて較正される。例えば、制動ユニット104は、2つの逐次的セッション間の合間を計算し、かつそれに応じてインピーダンスパターンを調時することができる。そのような較正は、セッションがいつ開始するかを推定し、それに応じて、例えば図7に関連して時間T1の後または時間T2の前に、制動ユニット104が作動することを可能にする。キャリア101が手動で操縦される場合、加えられるインピーダンスの変化が、装置100をいかに駆動させるかオペレータを誘導する。任意選択的に、制動ユニット104は、ケアセッションの、例えば繰返し閃光の繰返し挙動のようなパターン、例えばレートおよび/または位相を学習し、かつ例えばコイルおよび/または使用することのできる任意の他の制動機構を作動させることによって車輪制動器を制御するべく、同一挙動を持つパルスのような命令を発生する、位相ロックループ(PLL)回路のような学習モジュールを含む。そのような較正は、閃光の強度の変動、例えば皮膚上の装置の位置、皮膚の反射率、および/またはオペレータの手の位置の変化によって生じる変動に対する感受性を低減させる。装置100を調整するためにPLLが使用されるときに、例えば検出器103の遮蔽のため1回以上の閃光が検出されない場合、制動ユニット104は装置の移動を誤調整しないことに注目すべきである。
【0107】
本発明の一部の実施形態では、板134が永続的に下降位置にある場合、オペレータはそれを検知する。その場合、図7で最初の2つの事象にも描かれる通り、オペレータが装置102のケア処置実行の自律的繰返し率に適応するのに、数回の治療セッションを要することがある。
【0108】
上述の通り、皮膚科ケア器具102はハンドルを組み込んだIPLハンドピースとすることができる。ハンドルは、上述の通り、使用者がそれに取り付けられた装置100を操縦することを可能にする。そのような皮膚科ケア器具102は、治療用光源と、例えば図1に示す通り皮膚と接触する光導体とを含む。各セッションで、皮膚科ケア器具102は、皮膚を透過する赤外光のような光パルスを放出する。例えば各放射は、光源の種類によって、約〜100マイクロ秒から約〜200ミリ秒の間、例えば〜15ミリ秒の持続時間、および約〜5から〜40ジュール/cm2の間、例えば〜20ジュール/cm2のエネルギ密度を有する。パルス波長は、IPLの場合、約400nmから約1500nmの間である。大きい領域を処置する場合、IPLは自動繰返しモードで動作し、パルスは1〜4秒毎に放出される。他の繰返し率は、例えば皮膚科ケア器具102がLightSheer(商標)装置である場合、毎秒1〜2パルスの間とすることができ、例えば皮膚科ケア器具102がAlma(商標)EPLまたはLumenis(商標)Quantum装置である場合、3〜4秒毎に約1パルスとすることができる。繰返し率はQスイッチレーザの場合1〜10パルス/秒、皮膚表面再生に使用されるCO2レーザの場合、0.5〜2パルス/秒とすることができる。明確にするために、装置100はローラ105の移動または移動速度および/または照射率に応じて設定することができる。非限定的な例として、1パルス/秒の治療繰返し率で長さ1cmの1つの皮膚サブ領域から別のサブ領域に移動する間、装置の移動速度は1cm/秒より高くなければならない。照射のための待機時間が発生し、かつ照射も時間がかかるので、実際の移動はより高速であるが、移動速度は毎秒1cmとみなすことができる。オペレータは治療装置に加える手動力をパルス繰返し率に適応させるので、両方の数量の間には関係がある。
【0109】
次に図8を参照すると、本発明の一部の実施形態に係る、パルス・レーザ・ビームのような光ビームの監視された放射に応じて複数領域の皮膚科ケアプロセスを案内するための例示的装置700である。該装置は、IPLハンドピースまたはレーザ皮膚科ケア器具102が治療ビーム205を特定の皮膚サブ領域に放出したときに、皮膚から散乱した光206を感知することができるように、検出器103の正面を皮膚サブ領域の方向に向ける支持体701を含む。支持体701は任意選択的に、検出器103を皮膚サブ領域に近接して、例えば皮膚サブ領域から数センチメートルに保持するアームである。検出器103は皮膚サブ領域の方向に向けられ、そこから短い距離に配置されるので、たとえ類似のパルス幅および強度を有する場合でも、サブ領域からの反射に対する感度は増大し、外部照射源および閃光からの周囲光信号に対する感度は低下する。任意選択的に、支持体701は可撓性ステムから作られる。そのようにして、皮膚科ケアセッションを実行するために使用される皮膚科ケア器具102に応じて、検出器103の配置を調整することができる。支持体701は任意選択的に、キャリア装置に取り付けられたマウント702に接続される。任意選択的に、ハンドル704が皮膚科ケア器具102に取り付けられる。
【0110】
本発明の別の実施形態では、装置100は、複数領域のプロセス中にオペレータの腕を装置100に対して固定する、手固定要素を含む。例えば図9に示すように、キャリア101は物理的に、装置101をオペレータの腕に固定する弾性バンドを含む帯掛け機構141に接続される。そのようにして、装置100を皮膚99の大きい領域の直線帯状部に沿って安定的に駆動することができる。
【0111】
上述の通り、大きさの異なる様々な皮膚科ケア器具を使用することができ、検出器103の配置はそれに応じて調整することができる。検出器103からの信号は、上述の通り制動ユニット104を制御するために使用される。
【0112】
ここで再び図3Aを参照すると、それは、本発明の一部の実施形態に係る、移動追跡器に従って皮膚科ケア器具102の操縦を調整する例示的装置を示す。キャリア101および支持された皮膚科ケア器具102は、図2Aに描かれた通りである。しかし、図3Aでは、制動ユニット104は、半径Rを有する車輪219内に配置された移動停止機構を含む。移動追跡器は、ケア器具の内部動作を制御することなく、例えば光の放出、画像の取得等を制御または実行することなく、皮膚科ケア器具102の駆動を調整することができるように、1つの皮膚サブ領域から別のサブ領域への通過を示す。図3Aで、各皮膚サブ領域の長さはLで表わされる。装置101を手動的に、例えば手212で押動させる間、車輪219は一方向に自由に転動する。例えば図3Bは、患者80の背中で装置100を滑走させる例示的オペレータ80を示す。オペレータ80は、任意選択的に脱毛システムのヘッドである皮膚科ケア器具102を、滑走中に保持する。装置100は、患者80の背中の大きい皮膚領域上での皮膚科ケア器具102の移動を、例えば下述しかつ上で概説したように、装置101および/または皮膚科ケアセッションの移動に応じて調整する。
【0113】
例示的移動追跡器は、車輪219を支持しかつ板124のようなフレーム延長体を有するフレーム120を含む。回転板123のような回転延長体123は、車輪219の側面の1つに取り付けられる。延長体123、124は、車輪の回転軸220に垂直な共通平面上に配置される。そのようにして、延長体123、124は、車輪219が完全に1回転するたびに衝突する。そのような実施形態では、車輪の半径は、2つの隣接する皮膚サブ領域の中心間距離Dに応じて設定される。例えばR=D/2πである。そのようにして、衝突は、車輪がDに等しい距離だけ回転したときに、すなわち装置が1つの皮膚サブ領域の中心から隣接する皮膚サブ領域の中心に移動したときに、発生する。任意選択的に、回転板123は、ここでBと表わされる比較的高い撓み係数を有する。撓み係数は、延長体123、124の少なくとも一方の組成、および/またはそれらの厚さによって設定することができる。そのような実施形態では、回転延長体124は、フレーム延長体123との衝突後に屈曲する。屈曲は、操作するオペレータが感じるインピーダンスの増加で表わされる。図10Aは、屈曲角度θを有する回転延長体を持つ例示的車輪219を示す。図10Bは例示的グラフを示し、ここでθは屈曲角度を表わし、X軸の表記は第1皮膚サブ領域の中心からの距離を表わす。屈曲によって加えられるこのインピーダンスは、皮膚科ケアセッションが発生した印をオペレータが受け取るまで、例えばパルス・レーザ・ビームの照射をオペレータが観察するまで、装置101の速度を低下させかつ/または装置100を停止させるためのオペレータへの合図とすることができる。任意選択的に、撓み係数は、装置100の移動速度を低下させるのに充分であるように設定される。速度低下のレベルは、オペレータが装置100をどのくらいの速さで押動させていたかによって異なる。何らかの皮膚科ケア器具102が使用されている場合、オペレータは、治療部位を直接見ることなく、セッションの実行に関する印を受け取ることがあることに注目すべきである。オペレータは、パルス・レーザ・ビームの治療室の壁からの反射を見ることがある。オペレータが光パルスを見るたびに、オペレータは、制動ユニット104によって加えられるインピーダンスを克服するために、より勢いよく装置100を押動させることによって自動的に反応する。任意選択的に、セッションのレートは、レーザベースの脱毛器具の場合には毎秒約1〜2パルスであり、かつ/またはIPLのような脱毛器具の場合には3秒に1パルスである。
【0114】
図11Aに示す通り、本発明の一部の実施形態では、フレーム板123の代わりに、ばね132によって押圧されるボール131を使用することができる。そのような実施形態では、インピーダンスはばね132の撓み係数に応じて決定される。延長体の1つ以上を、例えば較正プロセスに応じて、オペレータに適合するように選択することができる。
【0115】
任意選択的に、回転板123またはばね131は、制動機構の動作がオペレータによって実施される作業計画および/またはオペレータの快適性に適合するように、調整することができる。顧客に供給されるキットに様々なばねまたは板を提供することができる。上述の通り、装置100は、大きい皮膚領域を検査、診断、かつ/または治療するべく、複数領域の皮膚科ケアプロセスを実行するように複数の異なる皮膚科ケア器具を案内するために使用することができる。これらの皮膚科ケア器具は各々、異なるレートの皮膚科ケアセッション、異なる長さの各皮膚科ケアセッション、および/または異なる大きさの皮膚サブ領域に対して調整される異なる作業領域を持つことができる。任意選択的に、複数の異なる制動機構またはその部品を含むキットが提供される。キットの各構成員、例えば制動機構、車輪、および/または制動器は、異なる皮膚科ケア器具の特徴に適合する。例えば一部の車輪はより大きい半径を有し、一部の車輪はより小さい半径を有する。半径が大きい場合、板124は、より大きい距離を転動した後で回転延長体123と交わる。半径が小さい場合、板124はより小さい距離を転動した後で回転延長体123と交わる。そのようにして、キットは、異なる作業領域を持つ異なる皮膚科ケア器具に案内を適応させることを容易にする。
【0116】
次に図11Bを参照すると、それは、本発明の一部の実施形態に係る、車輪219および制動ユニット104の指定シャフト903の略図である。図11Bに示す通り、板124は車輪219のリムの内側に配置され、車輪と共に回転する。ボール131は、装置100に不動に接続されたシリンダ900内に位置する。ボールは、下述の通り押されたときに、シリンダ900の穴から部分的に張り出す。シリンダ900の内側ではシャフト903の周りにばね132が位置しており、円錐形要素を押し、それがボールを上方に押し、その結果ボール131の部分的張出しがもたらされる。板124がボール131と衝突すると、ばねの圧縮を克服するように比較的強い力がオペレータによって加えられない限り、それは停止される。別の実施形態では、車輪219の運動に対するボール131の抵抗は、電流がソレノイドに流れる間円錐形要素を左側に引っ張るソレノイド904の助けにより、解放される。任意選択的に、解放電流は、上述しかつ図7に示す通り、光信号114を検出すると加えられる。図11Bに示した実施形態の利点は、ゲルが制動ユニット104の機構内に浸入するのを防止するために、機構全体を密封することができることである。
【0117】
任意選択的に、複数の延長体が車輪219に取り付けられる。同様に、回転延長体123は、例えば図12に示すように、完全に1回転するたびに2回フレーム延長体124と衝突するように配置される。N個の回転要素が車輪219に取り付けられる場合、各々距離L=2πR/Nの同一前進ステップを達成するために、半径Rを持つより大きい車輪を使用することができる。例えば約7〜20mmの半径を有する比較的大きい車輪を使用すると、調整の精度が高まることに注目する必要がある。脱毛プロセスのような一部の複数領域のプロセスは、Ab Sonic Gymnic TENS Uの導電性ゲルレーザ脱毛のように、大きい皮膚領域を局所麻酔ゲルおよび/または冷却ゲルのようなゲル層で被覆することを含む。そのようなゲルの層は、車輪を被覆することがあるので、装置によって提供される案内の精度を低減させることがある。しかし、車輪の半径が大きければ、ゲルの層が車輪を被覆することはできず、したがって案内の精度に対する影響は小さくなる。加えて、車輪軸は乾燥すると粘着し、かつ/またはすべすべになるゲルによって被覆されない。一例として、皮膚科ケア器具102が、その仕様書を参照によって本書に援用するLumenis(商標)のLightSheer(商標)システムのヘッドのような脱毛システムである場合、皮膚サブ領域の長さとすることのできるL=1cmの前進は、ゲルによって容易に被覆される直径が約3mmの車輪ではなく、1.05cmの直径を有しかつ各対の間に120°の角度を有する3つの回転要素を備えた車輪により、容易に達成することができる。
【0118】
任意選択的に、車輪219の直径は、皮膚科ケア器具102の特性に合わせて調整される。任意選択的に、特性は、油性または湿った皮膚表面とその上に配置される皮膚科ケア器具102、例えばIPLベースの装置の光導体の正面との間の摩擦係数である。任意選択的に、特性は、皮膚科ケア器具102またはそのリードの重量、および/または装置を押動させるユーザの推力である。
【0119】
任意選択的に、車輪219は、例えば図13に示すように、例えばはめば歯車として歯を持つ。そのような実施形態では、周囲の歯312は皮膚との摩擦を増大させ、ゲルを積層した皮膚領域上での装置102の滑動性を低下させる。本発明に係る歯付き車輪を製造する方法の非限定的な例は、コーティングによる車輪周面およびサンドペーパの肌理を持つ層または粗面を持つ車輪基部を機械的に整形する。ゲルの塗布層の厚さならびに/または車輪のはめ歯/歯の長さおよび/もしくは先鋭さに関しては、摩擦と患者の快適性との間にトレードオフが存在する。例えば先鋭な歯は不快であるが、先鋭さを低下させると、ゲルが使用されるときに車輪が滑動することがある。任意選択的に、外周を酸化アルミニウム結晶の粉末をコーティングした車輪が使用される。そのような粉末は、英国Saint Gobain abrasive Ltd.によって製造された「スーパーフレックス・クローズド・バック研磨材」細粒度120のサンドペーパ上に見られ、その仕様書を参照によって本書に援用する。微結晶砕片に見られる鋭利な縁は、ガラスのような非結晶砕片のより平滑な縁とは対照的に、高い摩擦をもたらす。約125ミクロンの小さいサイズの微結晶砕片は、それらの非常に鋭利な縁にもかかわらず、相対的な皮膚の快適さをもたらす。本発明の一部の実施形態では、制動ユニット104は、非平面状表面内のキャリア101の移動を調整するように適応させることができる。例えば図14は、図7に示した制動ユニットであるが、皮膚科ケア器具102の移動軌道および皮膚99の表面が平行ではない場合に、車輪219と皮膚99との間の接触を維持するためのばね31をさらに含む制動ユニットを示す。ばね31は車輪219およびフレーム120を皮膚99に向かって押す。そのようにして、車輪219の回転に対して加えられるインピーダンスは、肢体の皮膚表面のような湾曲面でさえもキャリア101の移動に影響する。
【0120】
本発明の一部の実施形態では、制動ユニット104は、2次元での皮膚科ケア器具102の移動を調整するように適応することができる。そのような実施形態では、皮膚科ケア器具102は、単一の複数領域プロセス中に、皮膚の大きい領域の片側から皮膚の大きい領域の別の側まで、皮膚の大きい領域の上から皮膚の大きい領域の下まで、操縦することができる。例えば、次に図15Aおよび15Bを参照すると、それは図3Aに示した装置の略図であり、制動ユニット104は、直交回転軸を有する2つの異なる車輪219、719を支持する2つのフレーム120、720を含む。フレーム120、720は、車輪219、719の1つを皮膚99に別々に接触させる一方、もう1つの車輪719、219が自由であるように、操縦することのできる共通回転要素700に対し直角に接続される。使用中に、任意選択的に共通回転要素700を回転させて、装置が操縦される方向に応じて車輪719、219の1つとの接触を確立させる。
【0121】
そのような実施形態では、車輪219、719の各々の半径は、皮膚科ケア器具102によって検査、治療、および/または診断される皮膚サブ領域のそれぞれの寸法に合わせて調整される。例えば図15Aおよび15Bで、車輪219の半径は、1つの皮膚サブ領域の中心と、キャリア101を前方に移動するときに位置する近接皮膚サブ領域の中心との間の距離に合わせて調整され、車輪719の半径は、1つの皮膚サブ領域の中心と、キャリア101を直角方向に、横方向に移動するときに位置する近接皮膚サブ領域の中心との間の距離に合わせて調整される。一例として、皮膚科ケア器具102が大きさ40mm×10mmを有するIPL治療ヘッドである場合、IPLヘッドを40mm前方または後方に、かつ10mm側方に押動する必要がある。装置100の長さL=3cmの前進には、直径3/π<1cmの車輪が必要である。その結果、断続的駆動組立体全体を、非常に小さく約2〜3cmほどにすることができる。
【0122】
次に図16を参照すると、それは、本発明の一部の実施形態に係る、色素性病変を診断するための装置800の略図である。キャリア101および制動ユニット104は上述の通りであるが、図16は、診断用に大きい皮膚領域を撮像するための撮像装置を支持する皮膚科ケア器具102を示す。
【0123】
そのような装置800は、癌性パターンを持つ病変および/または病理学的状態の病変が未熟練者によって検出されるように設計することができる。任意選択的に、皮膚科ケア器具102は、オペレータが手動で押す、市販のデジタルカメラのようなカメラである。カメラは、CCDベースのセンサのようなセンサ850、およびレンズ852を有する。任意選択的に、ガラスおよび/またはプラスチックのブロックのような光導体851が、カメラ102の前に配置される。任意選択的に、光導体851は透明であり、皮膚99に面する側が研磨され、その反対側は任意選択的に拡散白色を塗装され、側部を黒色で被覆される。任意選択的に、光導体851は、光導体851内に組み込むことのできる光ファイバのような延長体857を含む。1つ以上のフラッシュランプの素子のような光源855が延長体857に接続され、白色光を延長体857の方向に放出するように向けられる。そのようにして、光源855が閃光したときに、光導体851は領域ABに均質な照射を提供する。カメラ102は任意選択的に、皮膚99の画像を連続的に取得するオートフォーカス機構付きのビデオカメラまたはビデオモードのカメラである。制動ユニット104は任意選択的に、例えば上述の通り、光検出器によって起動される。そのようにして、装置800の移動は光源855の閃光に応じて調整される。使用中に、光源855は繰返し例えば0.5秒毎に起動され、閃光が制動ユニット104を調時する。オペレータは皮膚表面99上で装置800を押動し、前進は、例えば上述した通り、制動ユニット104によって調整される。制動器が解放されると、装置800は抵抗が無いので容易に前進することができる。装置800がある距離、例えば距離AB=L=2R(Rは制動ユニット104の車輪の半径を表わす)だけ押動されると、制動器が起動され、抵抗が増大する。そのようにして、光源855がトリガされたときに、装置800は実質的に静止し、高品質の画像を得ることができる。そのような繰返しプロセスは、欠落または重複を生じることなく、または実質的に生じることなく、大きい皮膚領域の近接した皮膚サブ領域を順次撮像することを可能にする。カメラは、装置800によって、または任意の他のユニットまたは装置によってトリガされず、装置800とは独立して動作することができる。そのような実施形態では、装置800は、ほとんどどのような市販のカメラでも案内するために使用することができる。
【0124】
任意選択的に、装置は、皮膚科ケア器具102によって取得されたビデオを処理するための解析ユニットを含む。解析ユニットは、皮膚サブ領域を例えばそれらの明るさに従って明確に示すフレームを識別することができる。解析ユニットは、皮膚科ケア器具102の一部とすることができ、かつ/または例えばキャリア101に堅固にまたは着脱自在に取り付けられた、外部の部品とすることができる。カメラはまた、画像を順次取得する繰返しモードで動作することもできる。カメラのフラッシュがオンの場合、キャリアをその停止位置まで迅速に押動させ、カメラが画像を撮影するまで待つことによって、カメラのフラッシュは前述の通り制動器を解放し、一連の高画質の画像が得られる。
【0125】
任意選択的に、装置800が患者の皮膚上を駆動される前に、開始点の較正画像が撮影される。較正画像は、上記撮像プロセスを実質的に同一の仕方で繰り返すことを可能にする。そのようにして、フレームが撮影される順序は同一であるのでフレーム毎の比較を行なうことができる。任意選択的に、較正画像は、患者の皮膚に特定の印221を付けることによって撮影される。任意選択的に、印は装置800を駆動すべき軌道を示す。
【0126】
任意選択的に、皮膚科ケア器具102によって取得されたビデオ、および/またはそのフレームは、解析のために、例えばインターネットを介して、遠隔端末に送信される。任意選択的に、データは、装置800に配置されたセルラインタフェースおよび/またはWi−Fiインタフェースのような、ワイヤレスインタフェースを用いて送信される。任意選択的に、送信されたデータを受信する遠隔端末で差異を見つけるのを助けるために、電子回路はフレーム番号をタグ付けする。そのような実施形態では、装置800は、本書に記載する案内によって初期皮膚癌を検出するための遠隔治療装置として使用される。
【0127】
図17Aおよび17Bは、本発明の一部の実施形態に係る例示的皮膚領域299、すなわちヒトの胴体、および図16に示された装置によって2つの異なる期間に順次撮像される1組の近接皮膚サブ領域299を示す。それぞれのフレームに撮影されるサブ領域間の領域224は、照明されないので、かつ/またはその取得中に装置800が移動するので、暗くかつ/またはぼやけている。セットの各画像は順次等距離皮膚サブ領域の画像である。図17Bでは、同一皮膚領域299が特定の期間後に、例えば1ヶ月後、1年後、および/または任意の中間期間後に撮像される。
【0128】
装置800の断続的移動は光源855の閃光に従って同期されるので、取得されたフレームは、それらの撮影順に他の取得されたフレームと照合することができることに注目すべきである。フレーム#nは、開始点および軌道が同一でありかつ光源855が同一テンポに従って閃光する限り、上述の通り取得された全てのビデオで同一の皮膚サブ領域を表わす。その結果、任意選択的に画像のアラインメントおよび/または登録無しに、色素沈着、および/または病変222、223の数、例えば黒子数の変化を照合により検出することができる。一例として、第1取得ビデオにおけるフレーム番号89が黒子を示す場合、同じ黒子が第2取得ビデオのそれぞれのフレームに示される。そのような画像取得は、特定の病変のそれぞれのフレームを医師のような使用者に同時に表示し、かつ/またはそれぞれのフレームを解析ユニットに転送することを可能にする。色素沈着の変化が第2撮像セッションで取得されたビデオの特定のフレームに示される場合、色素沈着の変化が発生する前に取得されたそれぞれのフレームと照合したときに、それは容易に検出される。そのようにして、大きい皮膚領域における黒子の変化を診断および検出するのに要する時間は、例えば1フレーム当たり10秒以下に短縮される。例えば皮膚領域が約40cm×50cmの背中領域であり、かつ各フレームが2cm×2cmの大きさを有する場合、20×25=500のフレームを撮影する必要がある。装置800を順次前進させることによって、250秒以内に、すなわち4.5分未満で、背中領域を撮影し、任意選択的に解析することができる。
【0129】
次に図18を参照すると、それは、本発明の一部の実施形態に係る、多種多様な大きさおよび形状の皮膚科ケア器具102の帯掛けを可能にする例示的汎用帯掛け機構の略図である。帯掛け機構は、任意選択的に図1の装置100として定義される断続的前進装置17の、IPL器具のような種々の皮膚科ケア器具102への帯掛けを可能にする。帯掛け機構は、一方向に可撓性をもたらす軸1812によって接続されたセグメント188を有するブレスレット187を含む。任意選択的に、ブレスレット187は現在入手可能な時計用バンドと同様である。しかし、セグメント188に軟質層189、例えば約1mmから約5mmの間の厚さを有するシリコン系の層189が加えられる。軟質層189は、使用される皮膚科ケア器具102の勾配および/または形状182に、例えば円錐台形を有するIPLにブレスレット187を一致させる。軟質層189はまた、ブレスレット187と皮膚科ケア器具102の筐体との間の摩擦を増大させる。伸縮要素1810は、層189が圧縮されるまでブレスレット187の締付けを可能にする。任意選択的に、例えば10〜150mmの直径を有する大きいサイズの皮膚科ケア器具に一致させるために、一連のブレスレット(図示せず)が使用される。
【0130】
セグメント188の1つ以上は、金属球183を有する球面継手184に不動に接続された板186に不動に接続される。金属球183は装置17に不動に接続される。したがって、例えば上述と同様に、装置17を任意の方向1811に駆動することが可能である。これは、ブレスレット187を皮膚科ケア器具102の水平および/または垂直両方の部分に取り付けることを可能にする。締付けねじ185は装置17に安定性をもたらす。
【0131】
上述の通り、皮膚科ケア器具102は、光をベースとする装置、例えばIPLユニット、音響治療装置、および/または触角治療装置、例えば触覚刺激を発生しかつ/またはブザー音を放出する装置のような治療装置とすることができる。装置800の移動は治療装置の動作に従って調整されるので、オペレータは少ない努力および/または注意で装置を操縦することができる。装置800は皮膚科ケア器具102の外部トリガを必要としないので、装置800はほとんど全ての皮膚科ケア器具102に適応させることができる。光に基づく治療装置は、Lumenis(商標)、Syneron(商標)、Alma(商標)、Palomar(商標)、Candela(商標)、Quantel(商標)等によって製造されたようなフラクセル、IPL、またはレーザベースの装置の有無にかかわらず、皮膚病変治療、脱毛治療、皮膚引締め治療、挫瘡治療、刺青または色素沈着除去治療、皮膚表面再生を含む。モノポーラまたはバイポーラ皮膚治療エネルギを放射し、かつ装置800と共に使用することのできるケア装置は、Lumenis(商標)、Syneron(商標)、Alma(商標)、Thermage(商標)等によって製造されている。上述の通り、装置は治療、診断、および/または検査器具に堅固に固定し、かつ/または種々の独立した器具を案内するために使用することができる。そのような装置は、セッションを実行するために要求される努力および/または注意を低減させるために、かつ/またはこれらの実行セッションの精度を高めるために、既存の皮膚科ケア器具102に対する付加装置として使用することができる。
【0132】
次に図19を参照すると、それは、本発明の一部の実施形態に係る、すべすべした湿った皮膚のみならず乾燥した皮膚上でも様々な皮膚科ケア器具を案内するように適応された、多種多様なサイズおよび形状の着脱自在の断続的前進ローラを交換するための機構を持つ装置の略図である。装置1900は、前方または後方押し込み力方向Fに対して適切な摩擦をもたらすゴム製の着脱自在の車輪1901を支持するように設定される。ソレノイドは矩形の箱1902内に存在する一方、制動機構は、1903によって示されるように、矩形の箱の底部に位置する。制動機構は、車輪1901のシャフト1904から張り出して、電流がソレノイドに流れていないときにOFF状態でソレノイドに位置するばねによって下方に圧縮されるロッドと衝突する、球形ボールを利用する。ばね定数は、ボールがロッドと衝突したときに、たとえローラおよび治療装置がオペレータによって押されても、ローラの停止を確実にするのに充分に高いように選択した。他方、ばね定数は、制動器開放制御回路の誤作動が発生した場合のように、オペレータが停止機構を克服することを希望するときに、そうすることができるように充分に弱い。電流によりソレノイドが起動して制動器を解放するときと、車輪が巡回を完了したときに車輪をいつでも停止してよい状態であるという指標を受け取り、電流を停止することによってソレノイドが作動停止するときとの間の期間は、180ミリ秒となるように選択した。この期間は、押す手がインピーダンスの低下の感覚に反応してローラを移動させるのに充分長く、かつ手動オペレータが高速でローラを移動させるときに、皮膚上の正しい治療位置でローラの停止を確実にするのに充分短い。この期間をレーザまたはIPL閃光率のみならず個々のオペレータの反応時間に従って設定する能力は有利である。非限定的な例として、期間は約30ミリ秒から400ミリ秒の範囲内とすることができる。400ミリ秒の上限は、治療パルスを3秒毎に発射する低速EPLの場合、およびオペレータが例えば経験の欠如のため意図的に遅く操作することを希望する場合に、設定することができる。図19は、ローラ1900を市販の脱毛レーザの遠位部1906に帯掛けすることを可能にするアダプタ1905を示す。ソレノイドのみならず、その制御回路もまた、任意選択的に18VのDC電流源によって作動する。
【0133】
本発明の別の実施形態では、回路は、治療装置によって放出される治療光のパルスを検出し、かつそれに応答してソレノイドを作動停止させるように設定される。回路は、全治療中に治療装置によって放出されたパルス数の計数を可能にするカウンタを有する。この数は治療装置オペレータにとって関心事であり、オペレータが患者に料金を請求するのに役立つ。これは、ディスプレイのような指定されたマン・マシン・インタフェース(MMI)上に表示することができる。上述の通り、1つの着脱自在の車輪を別の車輪と交換することにより、使用される様々な皮膚科ケア器具に合わせて皮膚科ケアセッションを調整することが可能になる。この調整は、上述の通り、様々な照射率および作業領域を持つ様々な皮膚科ケア器具を使用することを容易にする。
【0134】
本出願から成熟する特許の存続期間の期間中には、多くの関連するシステムおよび方法が開発されることが予想され、皮膚科ケア器具、治療装置、診断装置、および検査装置の用語の範囲は、すべてのそのような新しい技術を先験的に包含することが意図される。
【0135】
本明細書中で使用される用語「約」は、±20%を示す。
【0136】
用語「含む/備える(comprises、comprising、includes、including)」、「有する(having)」、およびそれらの同根語は、「含むが、それらに限定されない(including but not limited to)」ことを意味する。この用語は、「からなる(consisting of)」および「から本質的になる(consisting essentially of)」を包含する。
【0137】
表現「から本質的になる」は、さらなる成分および/または工程が、特許請求される組成物または方法の基本的かつ新規な特徴を実質的に変化させない場合にだけ、組成物または方法がさらなる成分および/または工程を含み得ることを意味する。
【0138】
本明細書中で使用される場合、単数形態(「a」、「an」および「the」)は、文脈がそうでないことを明確に示さない限り、複数の参照物を包含する。例えば、用語「化合物(a compound)」または用語「少なくとも1つの化合物」は、その混合物を含めて、複数の化合物を包含し得る。
【0139】
用語「例示的」は、本明細書では「例(example,instance又はillustration)として作用する」ことを意味するために使用される。「例示的」として記載されたいかなる実施形態も必ずしも他の実施形態に対して好ましいもしくは有利なものとして解釈されたりかつ/または他の実施形態からの特徴の組み入れを除外するものではない。
【0140】
用語「任意選択的」は、本明細書では、「一部の実施形態に与えられるが、他の実施形態には与えられない」ことを意味するために使用される。本発明のいかなる特定の実施形態も対立しない限り複数の「任意選択的」な特徴を含むことができる。
【0141】
本開示を通して、本発明の様々な態様が範囲形式で提示され得る。範囲形式での記載は単に便宜上および簡潔化のためであり、本発明の範囲に対する柔軟性のない限定として解釈すべきでないことを理解しなければならない。従って、範囲の記載は、具体的に開示された可能なすべての部分範囲、ならびに、その範囲に含まれる個々の数値を有すると見なさなければならない。例えば、1〜6などの範囲の記載は、具体的に開示された部分範囲(例えば、1〜3、1〜4、1〜5、2〜4、2〜6、3〜6など)、ならびに、その範囲に含まれる個々の数値(例えば、1、2、3、4、5および6)を有すると見なさなければならない。このことは、範囲の広さにかかわらず、適用される。
【0142】
数値範囲が本明細書中で示される場合には常に、示された範囲に含まれる任意の言及された数字(分数または整数)を含むことが意味される。第1の示された数字および第2の示された数字「の範囲である/の間の範囲」という表現、および、第1の示された数字「から」第2の示された数「まで及ぶ/までの範囲」という表現は、交換可能に使用され、第1の示された数字と、第2の示された数字と、その間のすべての分数および整数とを含むことが意味される。
【0143】
明確にするため別個の実施形態の文脈で説明されている本発明の特定の特徴が、単一の実施形態に組み合わせて提供されることもできることは分かるであろう。逆に、簡潔にするため単一の実施形態で説明されている本発明の各種の特徴は別個にまたは適切なサブコンビネーションで、あるいは本発明の他の記載される実施形態において好適なように提供することもできる。種々の実施形態の文脈において記載される特定の特徴は、その実施形態がそれらの要素なしに動作不能である場合を除いては、それらの実施形態の不可欠な特徴であると見なされる
べきではない。
【0144】
本発明はその特定の実施態様によって説明してきたが、多くの別法、変更および変形があることは当業者には明らかであることは明白である。従って、本発明は、本願の請求項の精神と広い範囲の中に入るこのような別法、変更および変形すべてを包含するものである。
【0145】
本明細書で挙げた刊行物、特許および特許出願はすべて、個々の刊行物、特許および特許出願が各々あたかも具体的にかつ個々に引用提示されているのと同程度に、全体を本明細書に援用するものである。さらに、本願で引用または確認したことは本発明の先行技術として利用できるという自白とみなすべきではない。節の見出しが使用されている程度まで、それらは必ずしも限定であると解釈されるべきではない。
【特許請求の範囲】
【請求項1】
複数の皮膚領域における皮膚科ケアプロセスを案内する装置であって、皮膚科ケア器具が各々皮膚領域の複数の皮膚サブ領域の1つで複数の皮膚科ケアセッションを断続的に実行する間、前記皮膚領域上の前記皮膚科ケア器具の駆動を支持するキャリアと、前記駆動中に前記複数の皮膚サブ領域のうちの第1サブ領域から前記複数の皮膚サブ領域のうちの第2サブ領域への前記キャリアの移動を調整する制動ユニットとを備えることを特徴とする装置。
【請求項2】
前記皮膚科ケア器具は、ハンドヘルドエピスコープ、画像センサ、カメラ、ビデオカメラ、触覚治療器具、電磁エネルギ(EM)トランスミッタ、そのようなEMパルスの導管、超音波トランスミッタ、超短パルス光(IPL)脱毛器、およびレーザ器具から成る群から選択されることを特徴とする、請求項1に記載の装置。
【請求項3】
前記皮膚科ケア器具は、前記群のいずれかの構成員のヘッドおよびハンドピースの少なくとも1つであることを特徴とする、請求項2に記載の装置。
【請求項4】
前記駆動は人間オペレータによって手動で起動され、前記制動ユニットは前記駆動への抵抗を変化させることによって前記移動を調整することを特徴とする、請求項1に記載の装置。
【請求項5】
前記キャリアは、複数の異なる皮膚科ケア器具を着脱自在にかつ交代で支持するための大きさおよび形状に作られることを特徴とする、請求項1に記載の装置。
【請求項6】
前記装置は、前記各皮膚科ケアセッションの開始および終了の少なくとも1つを検出する検出器をさらに備え、前記制動ユニットは前記検出に従って前記移動を調整することを特徴とする、請求項1に記載の装置。
【請求項7】
前記皮膚科ケア器具は、少なくとも1つの光パルスを放射することによって前記各皮膚科ケアセッションを実行し、前記検出器は、前記少なくとも1つのパルスを検出することによって、前記各皮膚科ケアセッションの開始および終了の少なくとも1つを検出する光検出器であることを特徴とする、請求項6に記載の装置。
【請求項8】
前記皮膚領域は、肢体の皮膚領域の少なくとも60%、腹部の皮膚領域の少なくとも60%、背中の皮膚領域の少なくとも60%から成る群の構成員であることを特徴とする、請求項1に記載の装置。
【請求項9】
前記制動ユニットは、前記キャリアに動作可能に接続されかつ前記移動中に回転するように適応された少なくとも1つの車輪と、前記移動中に前記少なくとも1つの車輪の回転自由を抑制する少なくとも1つの車輪制動器とを含むことを特徴とする、請求項1に記載の装置。
【請求項10】
前記装置は、前記キャリアが前記皮膚領域上を移動した距離を示す移動追跡器をさらに備え、前記制動ユニットは前記距離に応じて前記移動を調整することを特徴とする、請求項1に記載の装置。
【請求項11】
前記少なくとも1つの車輪制動器は、前記車輪に接続された車輪板、車輪ボールおよび車輪棒の少なくとも1つと、可動板、可動ボールおよび可動棒の少なくとも1つとを含み、前記少なくとも1つの車輪制動器は、前記移動中に前記可動板、可動ボールおよび可動棒の少なくとも1つを動かして前記車輪板、車輪ボールおよび車輪棒の少なくとも1つと衝突させることによって、前記回転自由を抑制することを特徴とする、請求項9に記載の装置。
【請求項12】
前記少なくとも1つの車輪制動器は、前記車輪のリムの内側に接続された少なくとも1つの車輪板と、前記車輪のシャフトに接続された可動要素とを含み、前記少なくとも1つの車輪制動器は、前記移動中に前記可動要素を動かして前記少なくとも1つの車輪板と衝突させることによって、前記回転自由を抑制することを特徴とする、請求項9に記載の装置。
【請求項13】
前記少なくとも1つの車輪制動器は、前記車輪に接続された少なくとも1つの車輪板と、前記キャリアに接続されたフレーム板とを含み、前記フレーム板は、前記移動中に相互に衝突しかつ前記フレーム板の少なくとも1つを屈曲させるように配置され、前記屈曲は前記移動を制約することを特徴とする、請求項9に記載の装置。
【請求項14】
前記装置は、オペレータが手動で前記移動を実行するように前記キャリアを駆動させることを可能にするハンドルをさらに備えることを特徴とする、請求項1に記載の装置。
【請求項15】
前記装置は、前記移動中にオペレータの腕を装置に対して固定する手固定要素をさらに備えることを特徴とする、請求項1に記載の装置。
【請求項16】
前記装置は、前記複数の皮膚科ケアセッションのパターンを学習するための学習モジュールをさらに備え、前記制動ユニットは前記パターンに応じて前記調整を実行することを特徴とする、請求項1に記載の装置。
【請求項17】
前記皮膚科ケア器具は画像センサおよび閃光装置を含み、前記制動ユニットは、前記皮膚科ケア器具が前記複数の皮膚サブ領域の1つの上にあるときに前記閃光装置が閃光するように、前記移動を調整することを特徴とする、請求項1に記載の装置。
【請求項18】
前記装置は、前記閃光を検出する光検出器をさらに備え、前記制動ユニットは前記検出に応じて前記移動を調整することを特徴とする、請求項17に記載の装置。
【請求項19】
前記キャリアは前記皮膚科ケア器具の構成要素を含む筐体であることを特徴とする、請求項1に記載の装置。
【請求項20】
前記移動は2次元で実行されることを特徴とする、請求項1に記載の装置。
【請求項21】
前記装置は、前記皮膚科ケア器具を前記キャリアに把持するための帯掛け機構をさらに備えることを特徴とする、請求項1に記載の装置。
【請求項22】
前記帯掛け機構は柔軟層を有するセグメント化ブレスレットを含み、前記セグメント化ブレスレットが前記器具を把持したときに前記柔軟層は圧縮されることを特徴とする、請求項1に記載の装置。
【請求項23】
前記キャリアは前記皮膚領域と接触することを特徴とする、請求項1に記載の装置。
【請求項24】
皮膚科ケアプロセスを案内する方法であって、制動ユニットを有するキャリア内に皮膚科ケア器具を装着するステップと、皮膚領域上での前記皮膚科ケア器具の駆動を支持するために前記キャリアを使用しながら、複数の皮膚科ケアセッションを各々、前記皮膚領域の複数の皮膚サブ領域の1つで断続的に実行するステップと、前記複数の皮膚サブ領域の1つから別の1つへの前記皮膚領域上の前記キャリアの移動を自動的に調整するように前記制動ユニットを操作するステップとを含むことを特徴とする方法。
【請求項25】
前記駆動は人間オペレータによって手動で起動され、前記操作は前記駆動に対する抵抗を変化させることを含むことを特徴とする、請求項24に記載の方法。
【請求項26】
前記皮膚領域は、患者の肢体、腹部、および背中から成る群の構成員の少なくとも60%に及ぶことを特徴とする、請求項24に記載の方法。
【請求項27】
前記方法は、各前記ケアセッションで前記皮膚の複数のサブ領域の1つの画像を取得するステップをさらに含むことを特徴とする、請求項24に記載の方法。
【請求項28】
前記方法は、各前記ケアセッションで前記複数の皮膚サブ領域の異なるサブ領域に電磁(EM)パルスを放出するステップをさらに含むことを特徴とする、請求項24に記載の方法。
【請求項29】
前記EMパルスは、パルス・レーザ・ビーム、赤外光パルス、超音波パルスから成る群から選択されることを特徴とする、請求項28に記載の方法。
【請求項30】
前記方法は、各前記ケアセッションで前記複数の皮膚サブ領域の異なるサブ領域に触覚刺激を加えるステップをさらに含むことを特徴とする、請求項24に記載の方法。
【請求項31】
前記方法は、前記移動中に前記各皮膚科ケアセッションの開始および終了の少なくとも1つを検出するステップをさらに含み、前記操作は前記検出に応じて実行されることを特徴とする、請求項24に記載の方法。
【請求項32】
前記調整は、前記移動中に前記キャリアが移動した距離に応じて実行されることを特徴とする、請求項24に記載の方法。
【請求項33】
前記方法は、前記複数の皮膚科ケアセッションのレートを学習するステップと、前記レートに応じて前記制動ユニットを操作するステップとをさらに含むことを特徴とする、請求項24に記載の方法。
【請求項34】
皮膚科ケアプロセスを案内する方法であって、患者の皮膚領域上で皮膚科ケア器具の駆動を支持するステップと、前記皮膚科ケア器具によって断続的に放出される複数の電磁パルスを少なくとも1つの光検出器によって自動的に検出するステップと、前記複数の電磁パルスに応じて制動ユニットを操作して前記駆動を調整するステップとを含むことを特徴とする方法。
【請求項35】
前記光検出器は前記皮膚科ケア器具に外付けされることを特徴とする、請求項34に記載の方法。
【請求項36】
前記方法は、前記駆動中に前記皮膚領域の複数のサブ領域の複数の画像を取得するステップと、前記複数の画像を診断のために出力するステップとをさらに含むことを特徴とする、請求項34に記載の方法。
【請求項37】
前記方法は、前記駆動前に前記皮膚領域の初期位置に印を付けるステップと、各画像が実質的に同一サブ領域のそれぞれの追加画像を有するように複数の追加画像を取得するべく、前記方法に対応する方法で追加駆動を実行するために前記初期位置を使用するステップとをさらに含むことを特徴とする、請求項34に記載の方法。
【請求項38】
前記方法は、後期に前記皮膚領域上での前記皮膚科ケア器具の第2駆動を支持するステップと、前記皮膚科ケア器具によって断続的に放射される複数の追加電磁パルスを前記少なくとも1つの光検出器によって自動的に検出するステップと、前記複数の追加電磁パルスに応じて前記制動ユニットを操作して前記駆動を調整し、前記追加駆動中に前記複数のサブ領域の複数の追加画像を取得し、前記複数の画像および前記複数の追加画像を同時に提示するステップとをさらに含むことを特徴とする、請求項36に記載の方法。
【請求項39】
前記制動ユニットは前記皮膚科ケア器具に外付けされることを特徴とする、請求項34に記載の方法。
【請求項40】
複数の皮膚領域における皮膚科ケアプロセスを案内する方法であって、皮膚科ケア器具が複数の皮膚科ケアセッションを実行している間、患者の皮膚領域上で前記皮膚科ケア器具の駆動を支持するステップと、前記駆動中に前記皮膚科ケア器具が移動する距離を自動的に推定するステップと、前記距離に応じて前記駆動を調整するように制動ユニットを操作するステップとを含むことを特徴とする方法。
【請求項41】
前記少なくとも1つの車輪制動器は、ゲル、液体ゲル、水、および油のうちの少なくとも1つの侵入を防止するように封止されることを特徴とする、請求項11に記載の装置。
【請求項42】
前記光検出器は、外部照明源からの周囲光に対してよりも前記閃光の反射に対して感受性が高いことを特徴とする、請求項18に記載の装置。
【請求項43】
前記装置は、前記少なくとも1つの光パルスを計数するためのカウンタをさらに備えることを特徴とする、請求項7に記載の装置。
【請求項44】
前記少なくとも1つの車輪は、酸化アルミニウム結晶砕片、歯、ガラス砕片、カーバランダム片、および少なくとも1つのゴム層から成る群の構成員で少なくとも部分的に被覆されることを特徴とする、請求項7に記載の装置。
【請求項45】
前記少なくとも1つの車輪は、着脱自在であることを特徴とする、請求項7に記載の装置。
【請求項46】
前記キャリアは、前記皮膚科ケア器具を支持するために適合されたアダプタを含み、前記アダプタは、着脱自在であることを特徴とする、請求項1に記載の装置。
【請求項47】
前記少なくとも1つの車輪は、着脱自在であり、かつ複数の着脱自在な車輪から選択され、前記各着脱自在な車輪は、複数の異なる皮膚科ケア器具の1つの異なる皮膚科ケアセッション皮膚サブ領域サイズおよび少なくとも1つの異なる皮膚科ケアセッションレートに適合された方法で前記移動および前記調整を変化するように適合されていることを特徴とする、請求項9に記載の装置。
【請求項48】
前記少なくとも1つの車輪制動器は、着脱自在であり、かつ複数の着脱自在な車輪制動器から選択され、前記各着脱自在な車輪制動器は、複数の異なる皮膚科ケア器具の1つの異なる皮膚科ケアセッション皮膚サブ領域サイズおよび少なくとも1つの異なる皮膚科ケアセッションレートに適合された方法で前記移動および前記調整を変化するように適合されていることを特徴とする、請求項9に記載の装置。
【請求項1】
複数の皮膚領域における皮膚科ケアプロセスを案内する装置であって、皮膚科ケア器具が各々皮膚領域の複数の皮膚サブ領域の1つで複数の皮膚科ケアセッションを断続的に実行する間、前記皮膚領域上の前記皮膚科ケア器具の駆動を支持するキャリアと、前記駆動中に前記複数の皮膚サブ領域のうちの第1サブ領域から前記複数の皮膚サブ領域のうちの第2サブ領域への前記キャリアの移動を調整する制動ユニットとを備えることを特徴とする装置。
【請求項2】
前記皮膚科ケア器具は、ハンドヘルドエピスコープ、画像センサ、カメラ、ビデオカメラ、触覚治療器具、電磁エネルギ(EM)トランスミッタ、そのようなEMパルスの導管、超音波トランスミッタ、超短パルス光(IPL)脱毛器、およびレーザ器具から成る群から選択されることを特徴とする、請求項1に記載の装置。
【請求項3】
前記皮膚科ケア器具は、前記群のいずれかの構成員のヘッドおよびハンドピースの少なくとも1つであることを特徴とする、請求項2に記載の装置。
【請求項4】
前記駆動は人間オペレータによって手動で起動され、前記制動ユニットは前記駆動への抵抗を変化させることによって前記移動を調整することを特徴とする、請求項1に記載の装置。
【請求項5】
前記キャリアは、複数の異なる皮膚科ケア器具を着脱自在にかつ交代で支持するための大きさおよび形状に作られることを特徴とする、請求項1に記載の装置。
【請求項6】
前記装置は、前記各皮膚科ケアセッションの開始および終了の少なくとも1つを検出する検出器をさらに備え、前記制動ユニットは前記検出に従って前記移動を調整することを特徴とする、請求項1に記載の装置。
【請求項7】
前記皮膚科ケア器具は、少なくとも1つの光パルスを放射することによって前記各皮膚科ケアセッションを実行し、前記検出器は、前記少なくとも1つのパルスを検出することによって、前記各皮膚科ケアセッションの開始および終了の少なくとも1つを検出する光検出器であることを特徴とする、請求項6に記載の装置。
【請求項8】
前記皮膚領域は、肢体の皮膚領域の少なくとも60%、腹部の皮膚領域の少なくとも60%、背中の皮膚領域の少なくとも60%から成る群の構成員であることを特徴とする、請求項1に記載の装置。
【請求項9】
前記制動ユニットは、前記キャリアに動作可能に接続されかつ前記移動中に回転するように適応された少なくとも1つの車輪と、前記移動中に前記少なくとも1つの車輪の回転自由を抑制する少なくとも1つの車輪制動器とを含むことを特徴とする、請求項1に記載の装置。
【請求項10】
前記装置は、前記キャリアが前記皮膚領域上を移動した距離を示す移動追跡器をさらに備え、前記制動ユニットは前記距離に応じて前記移動を調整することを特徴とする、請求項1に記載の装置。
【請求項11】
前記少なくとも1つの車輪制動器は、前記車輪に接続された車輪板、車輪ボールおよび車輪棒の少なくとも1つと、可動板、可動ボールおよび可動棒の少なくとも1つとを含み、前記少なくとも1つの車輪制動器は、前記移動中に前記可動板、可動ボールおよび可動棒の少なくとも1つを動かして前記車輪板、車輪ボールおよび車輪棒の少なくとも1つと衝突させることによって、前記回転自由を抑制することを特徴とする、請求項9に記載の装置。
【請求項12】
前記少なくとも1つの車輪制動器は、前記車輪のリムの内側に接続された少なくとも1つの車輪板と、前記車輪のシャフトに接続された可動要素とを含み、前記少なくとも1つの車輪制動器は、前記移動中に前記可動要素を動かして前記少なくとも1つの車輪板と衝突させることによって、前記回転自由を抑制することを特徴とする、請求項9に記載の装置。
【請求項13】
前記少なくとも1つの車輪制動器は、前記車輪に接続された少なくとも1つの車輪板と、前記キャリアに接続されたフレーム板とを含み、前記フレーム板は、前記移動中に相互に衝突しかつ前記フレーム板の少なくとも1つを屈曲させるように配置され、前記屈曲は前記移動を制約することを特徴とする、請求項9に記載の装置。
【請求項14】
前記装置は、オペレータが手動で前記移動を実行するように前記キャリアを駆動させることを可能にするハンドルをさらに備えることを特徴とする、請求項1に記載の装置。
【請求項15】
前記装置は、前記移動中にオペレータの腕を装置に対して固定する手固定要素をさらに備えることを特徴とする、請求項1に記載の装置。
【請求項16】
前記装置は、前記複数の皮膚科ケアセッションのパターンを学習するための学習モジュールをさらに備え、前記制動ユニットは前記パターンに応じて前記調整を実行することを特徴とする、請求項1に記載の装置。
【請求項17】
前記皮膚科ケア器具は画像センサおよび閃光装置を含み、前記制動ユニットは、前記皮膚科ケア器具が前記複数の皮膚サブ領域の1つの上にあるときに前記閃光装置が閃光するように、前記移動を調整することを特徴とする、請求項1に記載の装置。
【請求項18】
前記装置は、前記閃光を検出する光検出器をさらに備え、前記制動ユニットは前記検出に応じて前記移動を調整することを特徴とする、請求項17に記載の装置。
【請求項19】
前記キャリアは前記皮膚科ケア器具の構成要素を含む筐体であることを特徴とする、請求項1に記載の装置。
【請求項20】
前記移動は2次元で実行されることを特徴とする、請求項1に記載の装置。
【請求項21】
前記装置は、前記皮膚科ケア器具を前記キャリアに把持するための帯掛け機構をさらに備えることを特徴とする、請求項1に記載の装置。
【請求項22】
前記帯掛け機構は柔軟層を有するセグメント化ブレスレットを含み、前記セグメント化ブレスレットが前記器具を把持したときに前記柔軟層は圧縮されることを特徴とする、請求項1に記載の装置。
【請求項23】
前記キャリアは前記皮膚領域と接触することを特徴とする、請求項1に記載の装置。
【請求項24】
皮膚科ケアプロセスを案内する方法であって、制動ユニットを有するキャリア内に皮膚科ケア器具を装着するステップと、皮膚領域上での前記皮膚科ケア器具の駆動を支持するために前記キャリアを使用しながら、複数の皮膚科ケアセッションを各々、前記皮膚領域の複数の皮膚サブ領域の1つで断続的に実行するステップと、前記複数の皮膚サブ領域の1つから別の1つへの前記皮膚領域上の前記キャリアの移動を自動的に調整するように前記制動ユニットを操作するステップとを含むことを特徴とする方法。
【請求項25】
前記駆動は人間オペレータによって手動で起動され、前記操作は前記駆動に対する抵抗を変化させることを含むことを特徴とする、請求項24に記載の方法。
【請求項26】
前記皮膚領域は、患者の肢体、腹部、および背中から成る群の構成員の少なくとも60%に及ぶことを特徴とする、請求項24に記載の方法。
【請求項27】
前記方法は、各前記ケアセッションで前記皮膚の複数のサブ領域の1つの画像を取得するステップをさらに含むことを特徴とする、請求項24に記載の方法。
【請求項28】
前記方法は、各前記ケアセッションで前記複数の皮膚サブ領域の異なるサブ領域に電磁(EM)パルスを放出するステップをさらに含むことを特徴とする、請求項24に記載の方法。
【請求項29】
前記EMパルスは、パルス・レーザ・ビーム、赤外光パルス、超音波パルスから成る群から選択されることを特徴とする、請求項28に記載の方法。
【請求項30】
前記方法は、各前記ケアセッションで前記複数の皮膚サブ領域の異なるサブ領域に触覚刺激を加えるステップをさらに含むことを特徴とする、請求項24に記載の方法。
【請求項31】
前記方法は、前記移動中に前記各皮膚科ケアセッションの開始および終了の少なくとも1つを検出するステップをさらに含み、前記操作は前記検出に応じて実行されることを特徴とする、請求項24に記載の方法。
【請求項32】
前記調整は、前記移動中に前記キャリアが移動した距離に応じて実行されることを特徴とする、請求項24に記載の方法。
【請求項33】
前記方法は、前記複数の皮膚科ケアセッションのレートを学習するステップと、前記レートに応じて前記制動ユニットを操作するステップとをさらに含むことを特徴とする、請求項24に記載の方法。
【請求項34】
皮膚科ケアプロセスを案内する方法であって、患者の皮膚領域上で皮膚科ケア器具の駆動を支持するステップと、前記皮膚科ケア器具によって断続的に放出される複数の電磁パルスを少なくとも1つの光検出器によって自動的に検出するステップと、前記複数の電磁パルスに応じて制動ユニットを操作して前記駆動を調整するステップとを含むことを特徴とする方法。
【請求項35】
前記光検出器は前記皮膚科ケア器具に外付けされることを特徴とする、請求項34に記載の方法。
【請求項36】
前記方法は、前記駆動中に前記皮膚領域の複数のサブ領域の複数の画像を取得するステップと、前記複数の画像を診断のために出力するステップとをさらに含むことを特徴とする、請求項34に記載の方法。
【請求項37】
前記方法は、前記駆動前に前記皮膚領域の初期位置に印を付けるステップと、各画像が実質的に同一サブ領域のそれぞれの追加画像を有するように複数の追加画像を取得するべく、前記方法に対応する方法で追加駆動を実行するために前記初期位置を使用するステップとをさらに含むことを特徴とする、請求項34に記載の方法。
【請求項38】
前記方法は、後期に前記皮膚領域上での前記皮膚科ケア器具の第2駆動を支持するステップと、前記皮膚科ケア器具によって断続的に放射される複数の追加電磁パルスを前記少なくとも1つの光検出器によって自動的に検出するステップと、前記複数の追加電磁パルスに応じて前記制動ユニットを操作して前記駆動を調整し、前記追加駆動中に前記複数のサブ領域の複数の追加画像を取得し、前記複数の画像および前記複数の追加画像を同時に提示するステップとをさらに含むことを特徴とする、請求項36に記載の方法。
【請求項39】
前記制動ユニットは前記皮膚科ケア器具に外付けされることを特徴とする、請求項34に記載の方法。
【請求項40】
複数の皮膚領域における皮膚科ケアプロセスを案内する方法であって、皮膚科ケア器具が複数の皮膚科ケアセッションを実行している間、患者の皮膚領域上で前記皮膚科ケア器具の駆動を支持するステップと、前記駆動中に前記皮膚科ケア器具が移動する距離を自動的に推定するステップと、前記距離に応じて前記駆動を調整するように制動ユニットを操作するステップとを含むことを特徴とする方法。
【請求項41】
前記少なくとも1つの車輪制動器は、ゲル、液体ゲル、水、および油のうちの少なくとも1つの侵入を防止するように封止されることを特徴とする、請求項11に記載の装置。
【請求項42】
前記光検出器は、外部照明源からの周囲光に対してよりも前記閃光の反射に対して感受性が高いことを特徴とする、請求項18に記載の装置。
【請求項43】
前記装置は、前記少なくとも1つの光パルスを計数するためのカウンタをさらに備えることを特徴とする、請求項7に記載の装置。
【請求項44】
前記少なくとも1つの車輪は、酸化アルミニウム結晶砕片、歯、ガラス砕片、カーバランダム片、および少なくとも1つのゴム層から成る群の構成員で少なくとも部分的に被覆されることを特徴とする、請求項7に記載の装置。
【請求項45】
前記少なくとも1つの車輪は、着脱自在であることを特徴とする、請求項7に記載の装置。
【請求項46】
前記キャリアは、前記皮膚科ケア器具を支持するために適合されたアダプタを含み、前記アダプタは、着脱自在であることを特徴とする、請求項1に記載の装置。
【請求項47】
前記少なくとも1つの車輪は、着脱自在であり、かつ複数の着脱自在な車輪から選択され、前記各着脱自在な車輪は、複数の異なる皮膚科ケア器具の1つの異なる皮膚科ケアセッション皮膚サブ領域サイズおよび少なくとも1つの異なる皮膚科ケアセッションレートに適合された方法で前記移動および前記調整を変化するように適合されていることを特徴とする、請求項9に記載の装置。
【請求項48】
前記少なくとも1つの車輪制動器は、着脱自在であり、かつ複数の着脱自在な車輪制動器から選択され、前記各着脱自在な車輪制動器は、複数の異なる皮膚科ケア器具の1つの異なる皮膚科ケアセッション皮膚サブ領域サイズおよび少なくとも1つの異なる皮膚科ケアセッションレートに適合された方法で前記移動および前記調整を変化するように適合されていることを特徴とする、請求項9に記載の装置。
【図6】


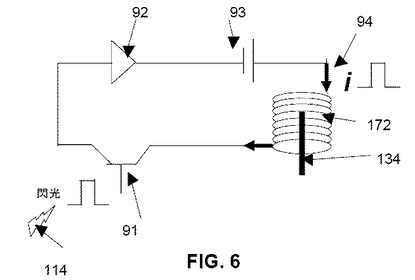
【図7】
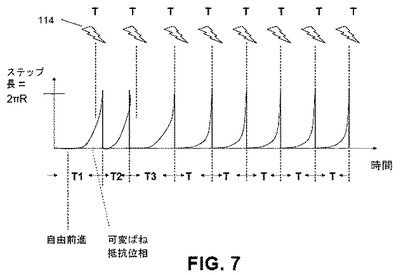
【図1】

【図2A−2B】
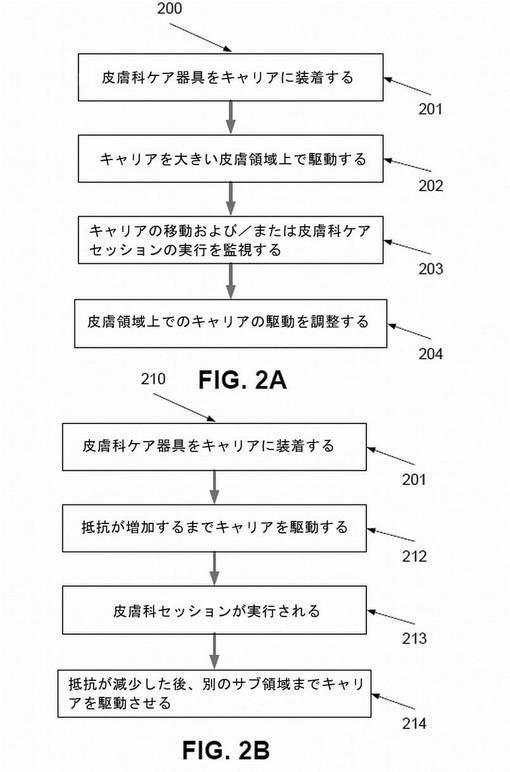
【図3A】
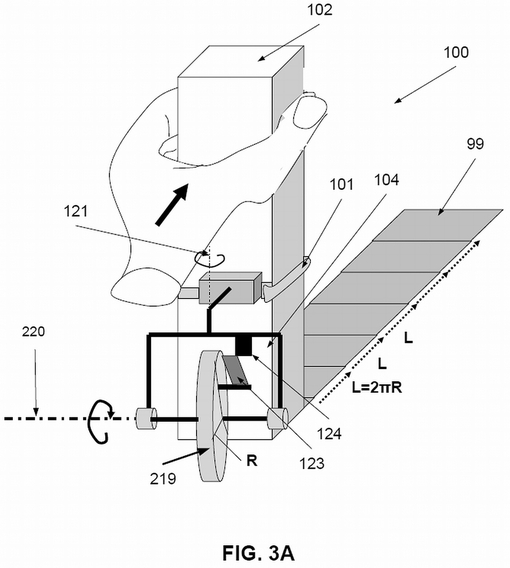
【図3B】
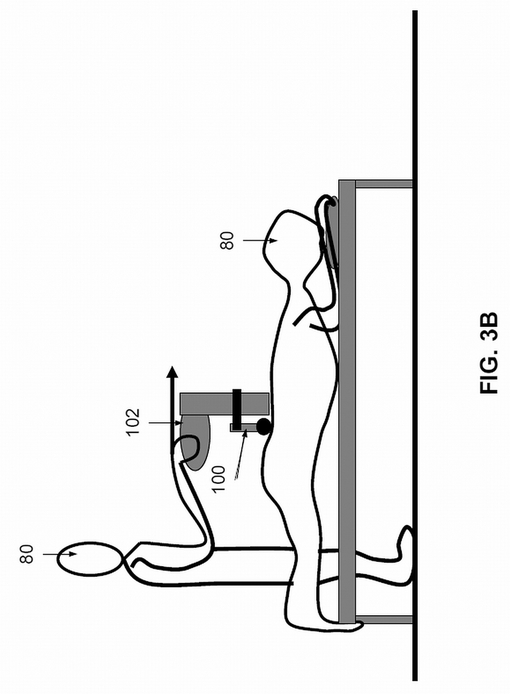
【図4A−4C】
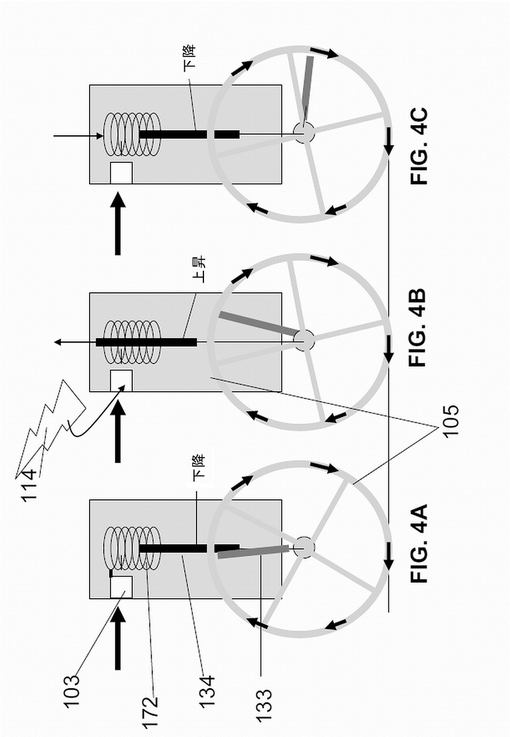
【図5】
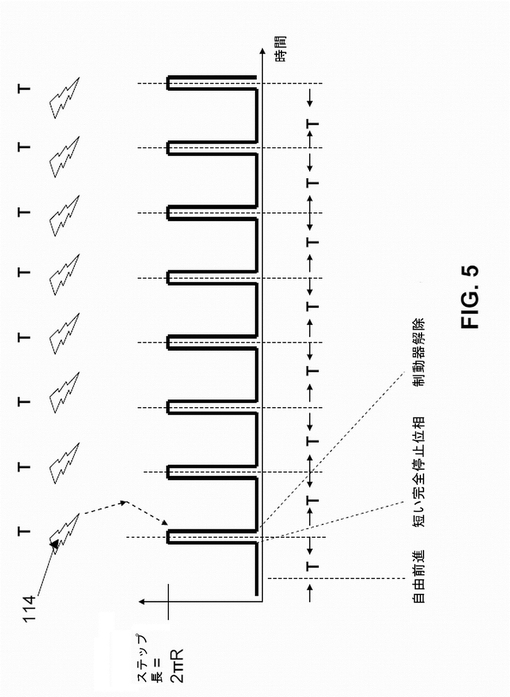
【図8】
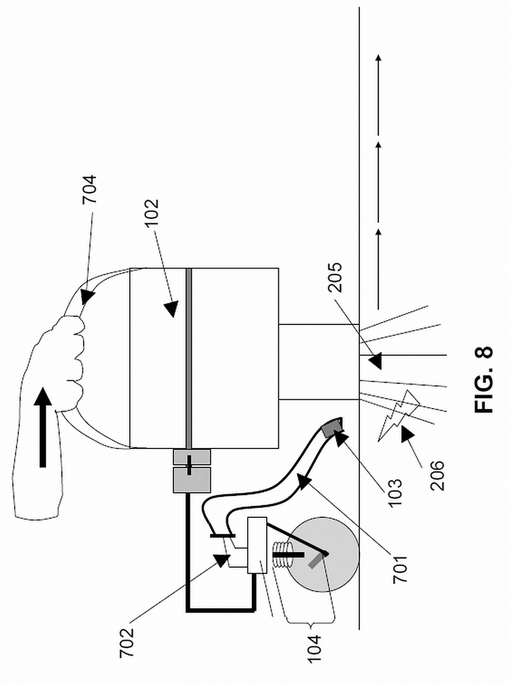
【図9】
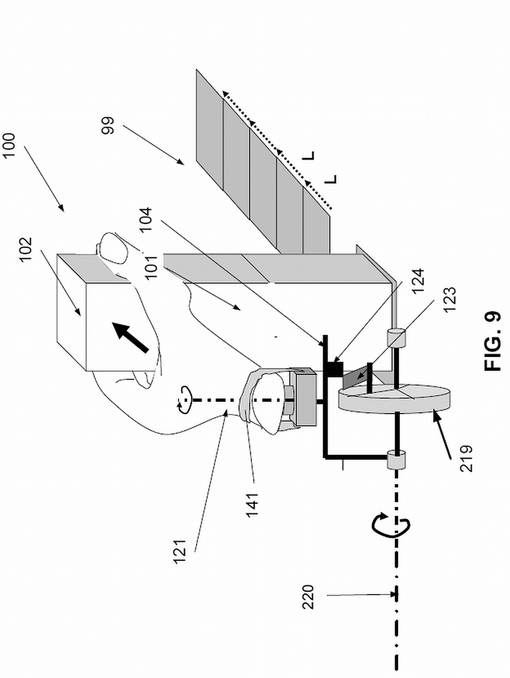
【図10A−10B】
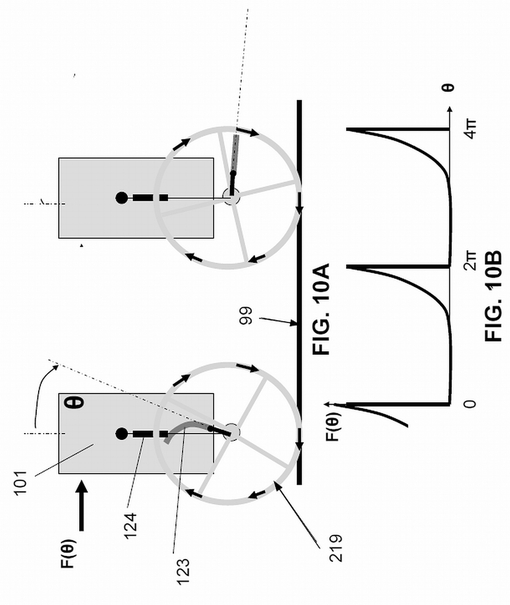
【図11A−11B】
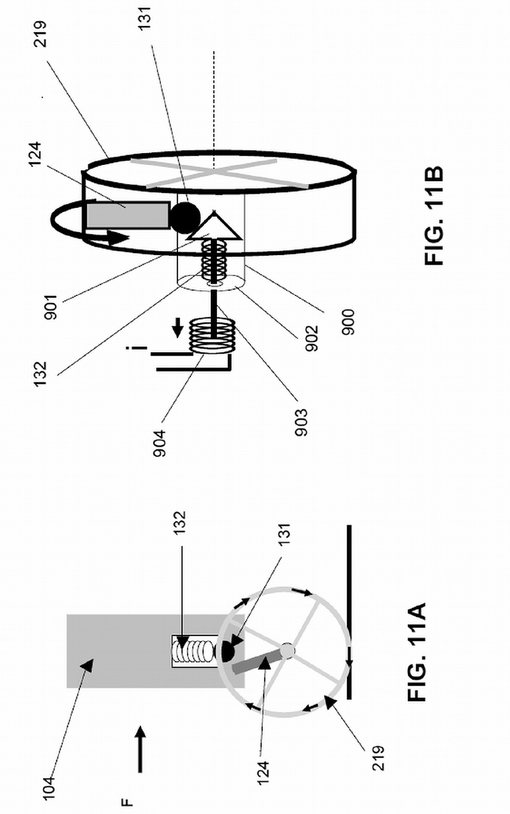
【図12】
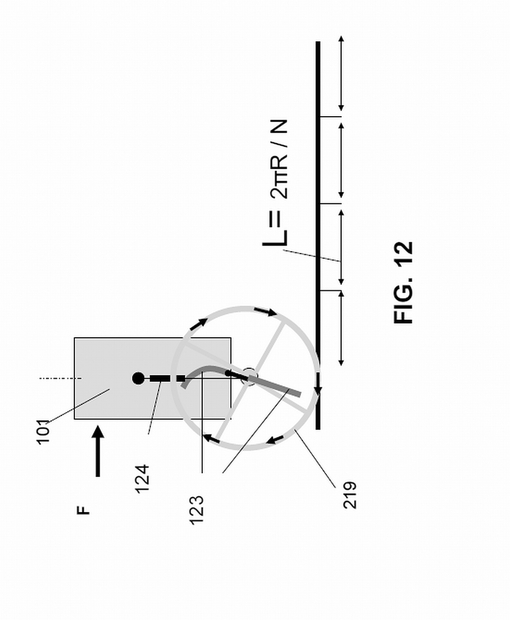
【図13】
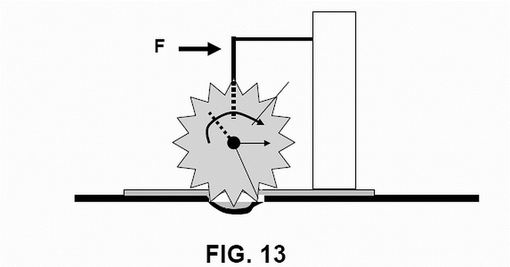
【図14】

【図15A−15B】
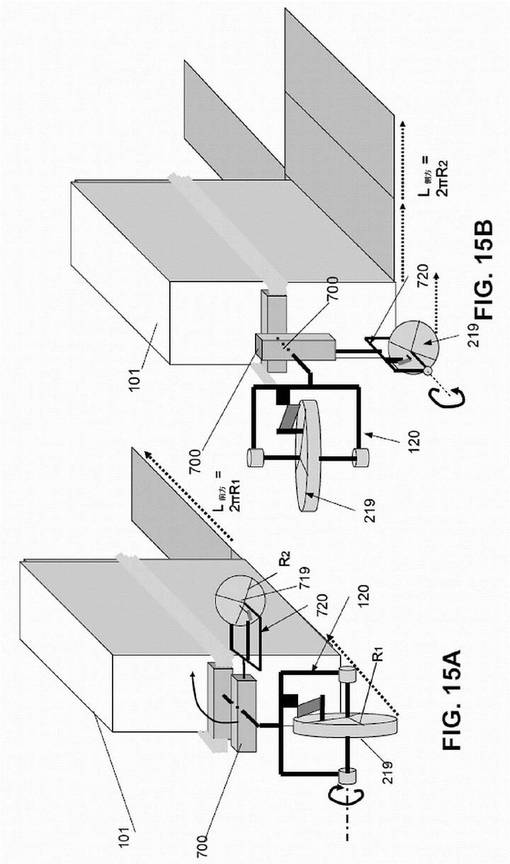
【図16】

【図17A−17B】
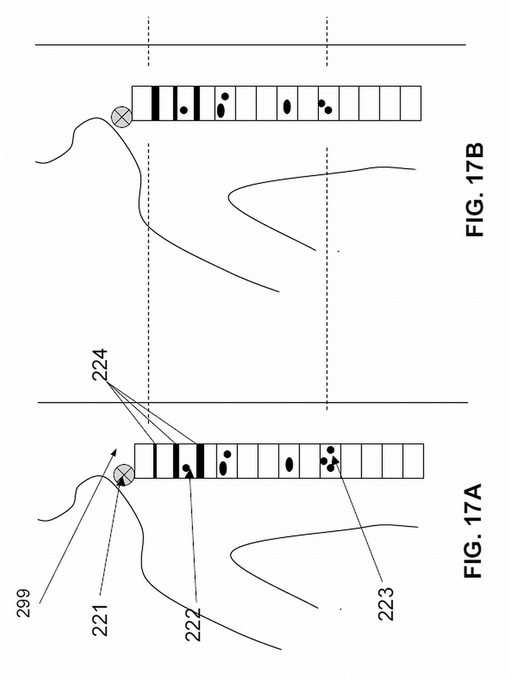
【図18】
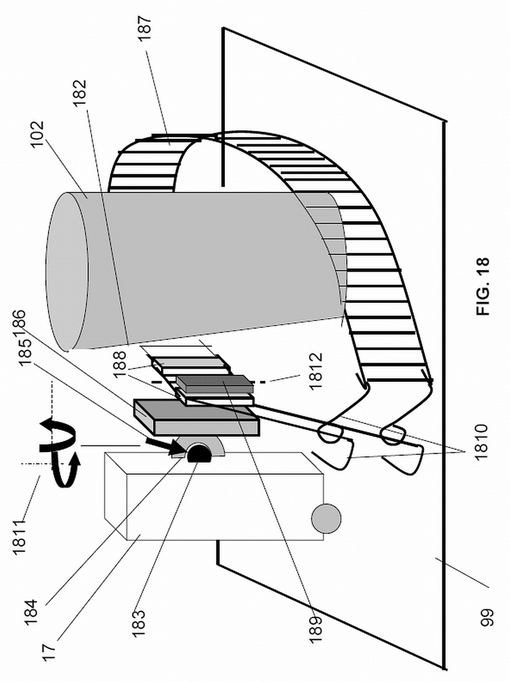
【図19】
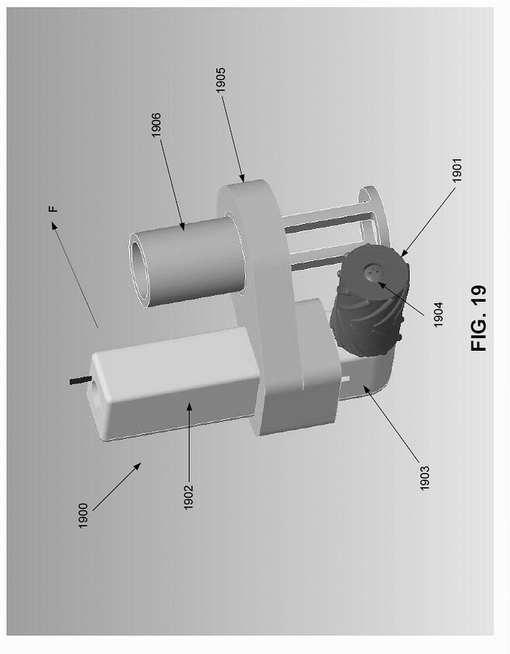
【図7】
【図1】
【図2A−2B】
【図3A】
【図3B】
【図4A−4C】
【図5】
【図8】
【図9】
【図10A−10B】
【図11A−11B】
【図12】
【図13】
【図14】
【図15A−15B】
【図16】
【図17A−17B】
【図18】
【図19】
【公表番号】特表2013−507219(P2013−507219A)
【公表日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願番号】特願2012−533736(P2012−533736)
【出願日】平成22年10月3日(2010.10.3)
【国際出願番号】PCT/IL2010/000795
【国際公開番号】WO2011/042895
【国際公開日】平成23年4月14日(2011.4.14)
【出願人】(512094867)
【Fターム(参考)】
【公表日】平成25年3月4日(2013.3.4)
【国際特許分類】
【出願日】平成22年10月3日(2010.10.3)
【国際出願番号】PCT/IL2010/000795
【国際公開番号】WO2011/042895
【国際公開日】平成23年4月14日(2011.4.14)
【出願人】(512094867)
【Fターム(参考)】
[ Back to top ]