
大気中または液体中におけるシングルまたは多重プローブ動作に対する干渉または幾何学的制約なしの走査プローブ顕微鏡
ある方法及び装置が、たとえば音叉などが大気中または液体中で使用される非光学的フィードバック機構(1.2)を有する走査プローブ顕微鏡を可能にする。本発明の実施形態は、上側または下側から幾何学的に本質的にレンズ(1.3)を妨害しないで、サンプルと相互に作用する当該プローブとの自由なアクセスを可能にする方法において、非光学的フィードバック機構を一体化できる走査型装置の幾何学的構造を必要とする。1つのそのような実施形態において、x、y及びzでのスキャナー(1.1)は、非光学的フィードバック機構が液体中または大気中いずれかに存在する構造を有するプローブを移動させることができ、カンチレバー型プローブまたは直線プローブを使用できる。当該システムはまた、液体中及び/または大気中で動作できる複数の独立した走査プローブ顕微鏡プローブを用いて構成される。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、幾何学的にもしくは光学的にまたはその両方のいずれをも妨害しない設計方法を用いて液体中または大気中での動作を用いる走査プローブ顕微鏡を可能にさせるための装置及び方法であって、そのような装置を、たとえば直立型光学顕微鏡などの他の顕微鏡システムに一体化させることを可能にさせるための装置及び方法である。それはまた、そのような液体細胞の画像化まで拡大適用することが困難であった光学的干渉なしのフィードバック機構を用いて液体中での使用を可能にする。この進歩の結果として、それは光学的干渉なしに液体中での多重プローブ原子間力顕微鏡の適用を可能にする。当該発明はまた、光学的干渉が課題ではない液体中での多重プローブ動作を可能にさせる方法を具体化する。
【背景技術】
【0002】
現在、生物用原子間力顕微鏡(AFM)装置及び走査プローブ顕微鏡(SPM)装置は、幾何学的及び光学的障害物及び/並びに光学的または他の干渉により深刻に制限される。従って、BioAFMは、直立型顕微鏡並びにたとえば4π構成または多くの非線形光学的なプロトコルなどの光学顕微鏡における進歩した概念に一体化されることができない。さらに、たとえば不透明基板上の単一分子などのサンプルを研究すること、または同時に光学的及びAFMを用いて、たとえば生物組織などの非常に散乱するサンプルを調査することは不可能である。さらに現在、すべてのBioAFM/SPMは、使用されるフィードバック機構からの光学的干渉に苦しむ。さらに、BioAFM/SPMは、上側から水浸対物レンズを使用する能力を有さない。たとえば、これらの制限の多くが、BioAFM/SPMを、たとえばラマンなどの分光技術に頻繁に用いられる標準の直立型顕微鏡の幾何学的構造に一体化されることを阻止する。このことが、走査プローブ顕微鏡のデータが獲得されるのと同じ散乱するサンプルの側でデータを獲得するための分光技術を獲得することを阻止する。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】Kageshima et al, “Noncontact Atomic Force Microscopy in Liquid Enviroment with Quartz Tuning Fork and Carbon Nanotube Probe,”Applied Surface Science 188,440(2002)
【非特許文献2】Koopman et al,“Shear Force Imaging of Soft Sample in Liquid Using a Diving Bell Concept,”Applied Physics Letters 83,5083(2003)
【非特許文献3】Hoeppener et al,“High−Resolution Near−Field Optical Imaging of single Nuclear Pore Complexes under Physiological Conditions,”Biophysical Journal 88,3681(2005)
【発明の概要】
【発明が解決しようとする課題】
【0004】
この発明に関する以前の文献には、非光学的フィードバック機構としての音叉の使用が存在する。一般的に、音叉が使用されるときそれらは水媒体で使用されないので、このことが非生物学的応用へのそのようなアプローチに制限をかける。
【0005】
液体で動作するAFMにおける音叉フィードバックの使用に対するアプローチについて2、3の例がある。そのようなアプローチの1つは、非水性液体に対する適用だけを制限する(非特許文献1)。水性液体において音叉を使用することの困難性が、非特許文献2の研究により示され、ここではダイビングベル機構を用いて音叉が水溶液に入ることを阻止するために最大限の努力が要される。他の研究がまた、プローブの使用を直線プローブに限定することにより音叉が液体媒体に入ることを阻止する(非特許文献3)。
【0006】
上記の制限における重要な要素は、すべてのBioAFM/SPMが深刻な幾何学的制限を引き起こす同一のビーム跳ね返りレーザーフィードバック機構を使用することである。この制限の認識にもかかわらず、媒体の性質または上記の問題のいくつかを解決するであろう光学的技術を用いた装置を顧慮せずに、大気中または液体媒体中で動作することができる直線プローブまたはカンチレバー型プローブのいずれかを用いてフィードバックの非光学的方法を使用することについての問題を解決することは不可能であった。また、液体媒体の中または外にある音叉とともに使用され、液体媒体中のサンプルを撮像することができるカンチレバー型プローブの例はない。
【0007】
また、上側から液浸対物レンズを使用する能力の例もない一方で、液体媒体のもとでのサンプルはまた、走査プローブ顕微鏡プローブにより上側から撮像される。
【0008】
また、大気中または液体媒体中のいずれかにおいて複数の独立したAFMプローブを使用する例もない。
【課題を解決するための手段】
【0009】
本発明は、大気中または液体中で使用される非光学的フィードバック機構を有する走査プローブ顕微鏡を可能にする方法及び装置である。幾何学的に本質的に上側または下側からレンズを妨害しないのみならず、サンプルと相互に作用する当該プローブとの自由なアクセスもまた可能とする方法で、非光学的フィードバック機構を一体化できる走査装置の幾何学的構造を必要とするこの対物レンズについて多数の実施形態がある。1つのそのような実施態様において、x、y及びzでのスキャナーは、非光学的フィードバック機構が液体中または大気中いずれかに存在する構造を有するプローブを移動させることができ、カンチレバー型のまたは直線のいずれかのプローブを使用することができる。当該システムは、上側から液体または水浸の対物レンズを用いて動作する能力を有する。このシステムはまた、液体から外に並びに一部分が液体中または液体から出ている音叉を用いた種々のカンチレバー型プローブとともに使用される。当該システムは、x、y及びzサンプルスキャナーを用いて、もしくは液体中及び/または大気中で動作することができる複数の独立した走査プローブ顕微鏡プローブを用いて構成される。
【0010】
当該システムはまた、たとえば、AFMパッチクランピング、光集積化のための新しい機会を用いた走査型電気化学顕微鏡、光集積化のための新しい機会を用いた液体中及び液体の外での化学蒸着などと構造的に関連付けられる新しい機能的な能力を有する走査プローブ顕微鏡の多数の新しい形成の使用を広げる。
【図面の簡単な説明】
【0011】
【図1】本発明の方法を組み込んだシステムの概略図である。
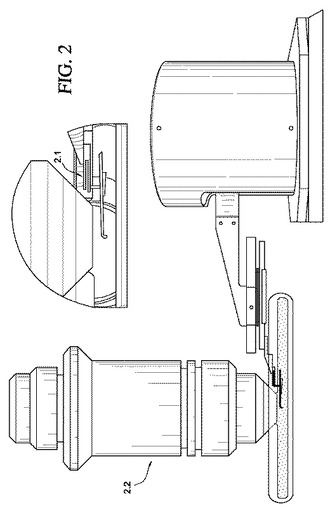
【図2】本発明の方法を組み込んだシステムのもう1つの概略図である。
【図3】本発明の1つの実施形態に係る確立されたシステムを示す図である。
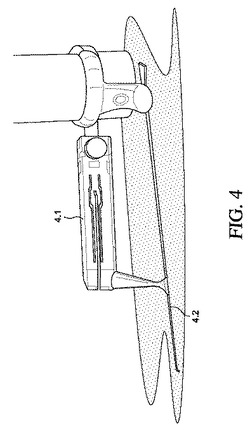
【図4】音叉プローブのもう1つの実施形態を図示する。
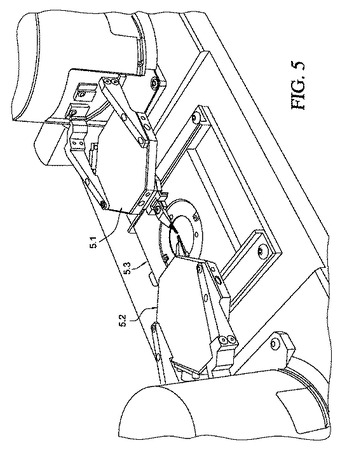
【図5】2つのプローブ5.1及び5.2を組み込んだ多重プローブシステムを図示する。
【図6】走査プローブ顕微鏡法プローブと同一の側から、液浸対物レンズ6.1を用いてまたは用いない多重プローブ動作を可能とさせる方法を図示する。
【発明を実施するための形態】
【0012】
上述したこと、並びに追加の目的、本発明の特徴及び利益がその好ましい種々の実施形態の以下の詳細な説明から、以下に簡単に記述された添付の図面により理解され、当業者に明らかとなるであろう。
【0013】
本発明の第1の好ましい実施形態を実施するシステムの概略の表示が図1に示される。この表示において、1.1は音叉1.2を備えるフィードバックの非光学的方法を保持するスキャナーである。この概略表示において、レンズ1.3が示され、音叉は一部分が液体中にあるが完全に液体中にない。実際、音叉は、大気中または完全に液体中にまたは一部分が液体中に存在することができ、サンプルに対して任意の角度とすることができ、その角度はフィードバック信号に対して通常またはせん断力が利用されるかどうかに基づいて選択される。
【0014】
本発明の方法が組み込まれるシステムのもう1つの概略図が図2に示される。図2において、音叉は液体から外に出ているが、カンチレバー型のプローブは全体が液体に浸されており、液浸レンズ2.2はその上側で使用される。すなわち、図2において、音叉2.1は液体外にあるが、カンチレバー型プローブは全体が液体中にあり、水浸レンズ2.2が使用される。再び留意することは、音叉はサンプルに対して任意の角度とすることができ、その角度はフィードバック信号に対して通常またはせん断力が利用されるかどうかに基づいて選択される。
【0015】
当該発明の1つの実施形態を用いた実際のシステムが図3に示される。図3において、上記システムにおいて、x、y及びzスキャナー3.1は、音叉フィードバック機構を有し、このケースでは全体が液体に浸されたプローブ3.2を保持し、水浸レンズ3.3は当該レンズと同一の側からサンプルを見ることができる。このケースにおいてまた、x、y及びzサンプルスキャナー3.4があり、当該図は、任意の種々の容器が環境的な制御を用いて及び用いないで液体3.5を保持するために使用されることを示す。
【0016】
プローブを用いた非光学的フィードバックのもう1つの実施形態が図4に示される。図4のプローブにおいて、音叉4.1は液体外に保持され、いまだにカンチレバー型プローブ4.2を使用できる。この実施形態における音叉は、この実施形態及びすべての他の実施形態におけるサンプルの表面に対して垂直であるが、当該音叉はサンプルに対して平行であることを含みサンプルに対して任意の角度とすることができる。ここで、これらのケースではガラスプローブが図示されているが、走査プローブイメージングの機能または別のやり方または変更または操作のための任意のプローブがこれともしくは本発明の一部である任意の他の非光学的または光学的なフィードバックとともに使用されることに気付くべきである。
【0017】
大気または液体動作を提供するために本発明の実施形態と連動することができる2つのプローブ5.1及び5.2を組み込んだ多重プローブシステムが図5に図示される。図5において、2つのプローブが図示されているが、2つを超える個数の独立して動作する走査プローブ顕微鏡法プローブを組み込むことができる。このシステムにおいてまた、サンプルは、非光学的フィードバックが液体中でプローブ画像化を行う間、x、y及びzスキャナー5.3で移動されることができる。
【0018】
この発明のいくつかの実施形態において、音叉は、伝導性がなく且つ当該音叉の機械的な特性に対して摂動をほとんど持たない物質で被覆されている。これを達成するために多数の方法があり、いくつかは、たとえば水媒体などの媒体などにおける電気的干渉を阻止する有機物質の薄膜の蒸着を含む。しかしながら、ディッピング法及び他の方法はまた、音叉または他の非光学的装置を被覆するために使用され、使用される当該方法は、たとえば音叉などが液体中または大気中で動作するための非光学的方法を達成するためにこの発明の重要な概念の1つを変更しない。
【0019】
本発明の目標を提供するために、音叉以外の多くの他の可能な方法があることもまた気付くべきである。そのような例の1つは、上記のように被覆することができるピエゾカンチレバー装置である。同様な方法でさらに多くの例がまたある。
【0020】
さらに、液体での多重プローブの動作は光学的または非光学的フィードバックのいずれを用いても実行されることがなかった。任意の液体で動作できる非光学的フィードバックがいま、明らかにこれを可能にする。しかしながら、もし非光学的フィードバックが緩和されるならば、本発明はまた、図6に表示されたような方法を含む。そのような方法は、本発明の形成以前には達成されない液体中での多重プローブ動作を達成することができる。この実施形態において、当該方法はレーザー6.2及び検出器6.3を含むが、検出器の正確な位置または正確な光学的方法を含み、もしビーム跳ね返りがあれば、障害物(図示)または干渉はすべて多重プローブ動作できる。しかしながら、当該方法では、ここで説明した他の実施形態の一部である多重プローブに対する非光学的フィードバックを実現しない。
【0021】
図6において、走査プローブ顕微鏡法プローブと同一の側から、液浸対物レンズ6.1を用いてまたは用いない多重プローブ動作を可能とさせる光学的な方法が示される。この実施形態において、当該方法は、レーザー6.2及び検出器6.3を含むが、検出器の種々の位置または種々の光学的方法を含み、もしビームの跳ね返りがあれば、障害物(図示)または干渉がすべて多重プローブ動作を可能とする。しかしながら、当該方法は、ここで説明した他の実施形態の一部である多重プローブのための非光学的フィードバックを実現しないが、確実に本発明の他の対物レンズを実現し、たとえばパッチクランピング型、コンダクタンス型又は走査型電気化学顕微鏡法、もしくは電気的又は熱的伝導性もしくは化学的搬送、並びに書き込みプローブ又はナノ真空用プローブなどのためのプローブなどのすべてのプローブを使用できる。このすべてはまた、本発明の他の方法を取り入れることができる。
【0022】
上記方法のすべてが力分光法に使用され、位相同期ループを使用または使用しない位相フィードバックを可能とさせるこの発明のそれらの実施形態は、シングルまたは多重プローブ動作を用いたそのような力分光法を適用したものにおいて例外的な感度を提供することができる。
【0023】
また、プローブと同一の側において上側からレンズを有することができることにより、たとえばラマン分光法または非線形光学的な技術などとの結合を過去に実現することが困難で不可能であった力分光法の結合を可能にし、それがいま、ここで説明された当該発明の実施形態を用いてすべて可能となる。
【技術分野】
【0001】
本発明は、幾何学的にもしくは光学的にまたはその両方のいずれをも妨害しない設計方法を用いて液体中または大気中での動作を用いる走査プローブ顕微鏡を可能にさせるための装置及び方法であって、そのような装置を、たとえば直立型光学顕微鏡などの他の顕微鏡システムに一体化させることを可能にさせるための装置及び方法である。それはまた、そのような液体細胞の画像化まで拡大適用することが困難であった光学的干渉なしのフィードバック機構を用いて液体中での使用を可能にする。この進歩の結果として、それは光学的干渉なしに液体中での多重プローブ原子間力顕微鏡の適用を可能にする。当該発明はまた、光学的干渉が課題ではない液体中での多重プローブ動作を可能にさせる方法を具体化する。
【背景技術】
【0002】
現在、生物用原子間力顕微鏡(AFM)装置及び走査プローブ顕微鏡(SPM)装置は、幾何学的及び光学的障害物及び/並びに光学的または他の干渉により深刻に制限される。従って、BioAFMは、直立型顕微鏡並びにたとえば4π構成または多くの非線形光学的なプロトコルなどの光学顕微鏡における進歩した概念に一体化されることができない。さらに、たとえば不透明基板上の単一分子などのサンプルを研究すること、または同時に光学的及びAFMを用いて、たとえば生物組織などの非常に散乱するサンプルを調査することは不可能である。さらに現在、すべてのBioAFM/SPMは、使用されるフィードバック機構からの光学的干渉に苦しむ。さらに、BioAFM/SPMは、上側から水浸対物レンズを使用する能力を有さない。たとえば、これらの制限の多くが、BioAFM/SPMを、たとえばラマンなどの分光技術に頻繁に用いられる標準の直立型顕微鏡の幾何学的構造に一体化されることを阻止する。このことが、走査プローブ顕微鏡のデータが獲得されるのと同じ散乱するサンプルの側でデータを獲得するための分光技術を獲得することを阻止する。
【先行技術文献】
【非特許文献】
【0003】
【非特許文献1】Kageshima et al, “Noncontact Atomic Force Microscopy in Liquid Enviroment with Quartz Tuning Fork and Carbon Nanotube Probe,”Applied Surface Science 188,440(2002)
【非特許文献2】Koopman et al,“Shear Force Imaging of Soft Sample in Liquid Using a Diving Bell Concept,”Applied Physics Letters 83,5083(2003)
【非特許文献3】Hoeppener et al,“High−Resolution Near−Field Optical Imaging of single Nuclear Pore Complexes under Physiological Conditions,”Biophysical Journal 88,3681(2005)
【発明の概要】
【発明が解決しようとする課題】
【0004】
この発明に関する以前の文献には、非光学的フィードバック機構としての音叉の使用が存在する。一般的に、音叉が使用されるときそれらは水媒体で使用されないので、このことが非生物学的応用へのそのようなアプローチに制限をかける。
【0005】
液体で動作するAFMにおける音叉フィードバックの使用に対するアプローチについて2、3の例がある。そのようなアプローチの1つは、非水性液体に対する適用だけを制限する(非特許文献1)。水性液体において音叉を使用することの困難性が、非特許文献2の研究により示され、ここではダイビングベル機構を用いて音叉が水溶液に入ることを阻止するために最大限の努力が要される。他の研究がまた、プローブの使用を直線プローブに限定することにより音叉が液体媒体に入ることを阻止する(非特許文献3)。
【0006】
上記の制限における重要な要素は、すべてのBioAFM/SPMが深刻な幾何学的制限を引き起こす同一のビーム跳ね返りレーザーフィードバック機構を使用することである。この制限の認識にもかかわらず、媒体の性質または上記の問題のいくつかを解決するであろう光学的技術を用いた装置を顧慮せずに、大気中または液体媒体中で動作することができる直線プローブまたはカンチレバー型プローブのいずれかを用いてフィードバックの非光学的方法を使用することについての問題を解決することは不可能であった。また、液体媒体の中または外にある音叉とともに使用され、液体媒体中のサンプルを撮像することができるカンチレバー型プローブの例はない。
【0007】
また、上側から液浸対物レンズを使用する能力の例もない一方で、液体媒体のもとでのサンプルはまた、走査プローブ顕微鏡プローブにより上側から撮像される。
【0008】
また、大気中または液体媒体中のいずれかにおいて複数の独立したAFMプローブを使用する例もない。
【課題を解決するための手段】
【0009】
本発明は、大気中または液体中で使用される非光学的フィードバック機構を有する走査プローブ顕微鏡を可能にする方法及び装置である。幾何学的に本質的に上側または下側からレンズを妨害しないのみならず、サンプルと相互に作用する当該プローブとの自由なアクセスもまた可能とする方法で、非光学的フィードバック機構を一体化できる走査装置の幾何学的構造を必要とするこの対物レンズについて多数の実施形態がある。1つのそのような実施態様において、x、y及びzでのスキャナーは、非光学的フィードバック機構が液体中または大気中いずれかに存在する構造を有するプローブを移動させることができ、カンチレバー型のまたは直線のいずれかのプローブを使用することができる。当該システムは、上側から液体または水浸の対物レンズを用いて動作する能力を有する。このシステムはまた、液体から外に並びに一部分が液体中または液体から出ている音叉を用いた種々のカンチレバー型プローブとともに使用される。当該システムは、x、y及びzサンプルスキャナーを用いて、もしくは液体中及び/または大気中で動作することができる複数の独立した走査プローブ顕微鏡プローブを用いて構成される。
【0010】
当該システムはまた、たとえば、AFMパッチクランピング、光集積化のための新しい機会を用いた走査型電気化学顕微鏡、光集積化のための新しい機会を用いた液体中及び液体の外での化学蒸着などと構造的に関連付けられる新しい機能的な能力を有する走査プローブ顕微鏡の多数の新しい形成の使用を広げる。
【図面の簡単な説明】
【0011】
【図1】本発明の方法を組み込んだシステムの概略図である。
【図2】本発明の方法を組み込んだシステムのもう1つの概略図である。
【図3】本発明の1つの実施形態に係る確立されたシステムを示す図である。
【図4】音叉プローブのもう1つの実施形態を図示する。
【図5】2つのプローブ5.1及び5.2を組み込んだ多重プローブシステムを図示する。
【図6】走査プローブ顕微鏡法プローブと同一の側から、液浸対物レンズ6.1を用いてまたは用いない多重プローブ動作を可能とさせる方法を図示する。
【発明を実施するための形態】
【0012】
上述したこと、並びに追加の目的、本発明の特徴及び利益がその好ましい種々の実施形態の以下の詳細な説明から、以下に簡単に記述された添付の図面により理解され、当業者に明らかとなるであろう。
【0013】
本発明の第1の好ましい実施形態を実施するシステムの概略の表示が図1に示される。この表示において、1.1は音叉1.2を備えるフィードバックの非光学的方法を保持するスキャナーである。この概略表示において、レンズ1.3が示され、音叉は一部分が液体中にあるが完全に液体中にない。実際、音叉は、大気中または完全に液体中にまたは一部分が液体中に存在することができ、サンプルに対して任意の角度とすることができ、その角度はフィードバック信号に対して通常またはせん断力が利用されるかどうかに基づいて選択される。
【0014】
本発明の方法が組み込まれるシステムのもう1つの概略図が図2に示される。図2において、音叉は液体から外に出ているが、カンチレバー型のプローブは全体が液体に浸されており、液浸レンズ2.2はその上側で使用される。すなわち、図2において、音叉2.1は液体外にあるが、カンチレバー型プローブは全体が液体中にあり、水浸レンズ2.2が使用される。再び留意することは、音叉はサンプルに対して任意の角度とすることができ、その角度はフィードバック信号に対して通常またはせん断力が利用されるかどうかに基づいて選択される。
【0015】
当該発明の1つの実施形態を用いた実際のシステムが図3に示される。図3において、上記システムにおいて、x、y及びzスキャナー3.1は、音叉フィードバック機構を有し、このケースでは全体が液体に浸されたプローブ3.2を保持し、水浸レンズ3.3は当該レンズと同一の側からサンプルを見ることができる。このケースにおいてまた、x、y及びzサンプルスキャナー3.4があり、当該図は、任意の種々の容器が環境的な制御を用いて及び用いないで液体3.5を保持するために使用されることを示す。
【0016】
プローブを用いた非光学的フィードバックのもう1つの実施形態が図4に示される。図4のプローブにおいて、音叉4.1は液体外に保持され、いまだにカンチレバー型プローブ4.2を使用できる。この実施形態における音叉は、この実施形態及びすべての他の実施形態におけるサンプルの表面に対して垂直であるが、当該音叉はサンプルに対して平行であることを含みサンプルに対して任意の角度とすることができる。ここで、これらのケースではガラスプローブが図示されているが、走査プローブイメージングの機能または別のやり方または変更または操作のための任意のプローブがこれともしくは本発明の一部である任意の他の非光学的または光学的なフィードバックとともに使用されることに気付くべきである。
【0017】
大気または液体動作を提供するために本発明の実施形態と連動することができる2つのプローブ5.1及び5.2を組み込んだ多重プローブシステムが図5に図示される。図5において、2つのプローブが図示されているが、2つを超える個数の独立して動作する走査プローブ顕微鏡法プローブを組み込むことができる。このシステムにおいてまた、サンプルは、非光学的フィードバックが液体中でプローブ画像化を行う間、x、y及びzスキャナー5.3で移動されることができる。
【0018】
この発明のいくつかの実施形態において、音叉は、伝導性がなく且つ当該音叉の機械的な特性に対して摂動をほとんど持たない物質で被覆されている。これを達成するために多数の方法があり、いくつかは、たとえば水媒体などの媒体などにおける電気的干渉を阻止する有機物質の薄膜の蒸着を含む。しかしながら、ディッピング法及び他の方法はまた、音叉または他の非光学的装置を被覆するために使用され、使用される当該方法は、たとえば音叉などが液体中または大気中で動作するための非光学的方法を達成するためにこの発明の重要な概念の1つを変更しない。
【0019】
本発明の目標を提供するために、音叉以外の多くの他の可能な方法があることもまた気付くべきである。そのような例の1つは、上記のように被覆することができるピエゾカンチレバー装置である。同様な方法でさらに多くの例がまたある。
【0020】
さらに、液体での多重プローブの動作は光学的または非光学的フィードバックのいずれを用いても実行されることがなかった。任意の液体で動作できる非光学的フィードバックがいま、明らかにこれを可能にする。しかしながら、もし非光学的フィードバックが緩和されるならば、本発明はまた、図6に表示されたような方法を含む。そのような方法は、本発明の形成以前には達成されない液体中での多重プローブ動作を達成することができる。この実施形態において、当該方法はレーザー6.2及び検出器6.3を含むが、検出器の正確な位置または正確な光学的方法を含み、もしビーム跳ね返りがあれば、障害物(図示)または干渉はすべて多重プローブ動作できる。しかしながら、当該方法では、ここで説明した他の実施形態の一部である多重プローブに対する非光学的フィードバックを実現しない。
【0021】
図6において、走査プローブ顕微鏡法プローブと同一の側から、液浸対物レンズ6.1を用いてまたは用いない多重プローブ動作を可能とさせる光学的な方法が示される。この実施形態において、当該方法は、レーザー6.2及び検出器6.3を含むが、検出器の種々の位置または種々の光学的方法を含み、もしビームの跳ね返りがあれば、障害物(図示)または干渉がすべて多重プローブ動作を可能とする。しかしながら、当該方法は、ここで説明した他の実施形態の一部である多重プローブのための非光学的フィードバックを実現しないが、確実に本発明の他の対物レンズを実現し、たとえばパッチクランピング型、コンダクタンス型又は走査型電気化学顕微鏡法、もしくは電気的又は熱的伝導性もしくは化学的搬送、並びに書き込みプローブ又はナノ真空用プローブなどのためのプローブなどのすべてのプローブを使用できる。このすべてはまた、本発明の他の方法を取り入れることができる。
【0022】
上記方法のすべてが力分光法に使用され、位相同期ループを使用または使用しない位相フィードバックを可能とさせるこの発明のそれらの実施形態は、シングルまたは多重プローブ動作を用いたそのような力分光法を適用したものにおいて例外的な感度を提供することができる。
【0023】
また、プローブと同一の側において上側からレンズを有することができることにより、たとえばラマン分光法または非線形光学的な技術などとの結合を過去に実現することが困難で不可能であった力分光法の結合を可能にし、それがいま、ここで説明された当該発明の実施形態を用いてすべて可能となる。
【特許請求の範囲】
【請求項1】
非光学的フィードバック形成に基づいた走査プローブ顕微鏡のための装置であり、カンチレバー型または直線のプローブを含む任意のタイプのプローブを用いて、液体中もしくは大気中または部分的に両方での動作を可能とさせることを特徴とする装置。
【請求項2】
上側または下側からの干渉なしに適切な当該プローブを用いて動作できることを特徴とする請求項1記載の装置。
【請求項3】
当該プローブがサンプルをプロービングするのと同一の側から液浸対物レンズを用いてまたは用いないで動作できることを特徴とする請求項1記載の装置。
【請求項4】
シングルプローブ動作または多重プローブ動作を提供できることを特徴とする請求項1から3のうちの記載のいずれか1つに記載の装置。
【請求項5】
コーティングが施されたまたはコーティングが施されていない音叉並びに他の非光学的センシング機構を使用できることを特徴とする請求項4記載の装置。
【請求項6】
同一の非光学的フィードバック装置上に新しいプローブを構成できることを特徴とする請求項5記載の装置。
【請求項7】
前記非光学的フィードバック装置の任意の方向付けには、通常の動作またはせん断力動作のための前記音叉に対して任意の角度を含むことができることを特徴とする請求項5または6記載の装置。
【請求項8】
任意の光学顕微鏡に一体化されることを特徴とする請求項5から7のうちの記載のいずれか1つに記載の装置。
【請求項9】
位相フィードバックを用いて超高感度の力分光法を実行することができることを特徴とする請求項8記載の装置。
【請求項10】
ラマン分光法または非線形光学的方法などの分光技術とともに超高感度の力分光法を実行できることを特徴とする請求項8記載の装置。
【請求項11】
たとえば、ラマン分光法または非線形光学的方法などの分光技術とともに超高感度の力分光法を実行できることを特徴とする請求項9記載の装置。
【請求項12】
パッチクランピング型、コンダクタンス型、電気型又は走査型電気化学顕微鏡法、もしくは、熱的伝導性、化学的蒸着又はナノ真空とともに一体化されることを特徴とする請求項4から11のうちの記載のいずれか1つに記載の装置。
【請求項13】
光学的フィードバックを用いて多重プローブ動作を可能にすることができる液体中もしくは大気中または部分的に両方でのプローブの動作を可能とさせることを特徴とする走査プローブ顕微鏡に対する装置。
【請求項14】
当該プローブはサンプルをプロービングするのと同一の側から液浸対物レンズを使用することができることを特徴とする請求項13記載の装置。
【請求項15】
カンチレバー型プローブまたは直線プローブを使用できることを特徴とする請求項13記載の装置。
【請求項16】
ラマン分光法または非線形光学的方法などの分光技術とともに超高感度の力分光法を実行できることを特徴とする請求項15記載の装置。
【請求項17】
位相フィードバックを用いて超高感度の力分光法を実行できることを特徴とする請求項15または16記載の装置。
【請求項18】
任意の光学顕微鏡に一体化されることを特徴とする請求項13から17のうちの記載のいずれか1つに記載の装置。
【請求項19】
パッチクランピング型、コンダクタンス型、電気型又は走査型電気化学顕微鏡法、もしくは、熱的伝導性、化学的蒸着又はナノ真空とともに一体化されることを特徴とする請求項18記載の装置。
【請求項20】
非光学的フィードバック形成に基づいた走査プローブ顕微鏡のための方法であり、カンチレバー型または直線のプローブを含む任意のタイプのプローブを用いて、液体中もしくは大気中または部分的に両方での動作を可能とさせることを特徴とする方法。
【請求項21】
上側または下側からの干渉なしに適切な当該プローブを用いて動作できることを特徴とする請求項20記載の方法。
【請求項22】
当該プローブがサンプルをプロービングするのと同一の側から液浸対物レンズを用いてまたは用いないで動作できることを特徴とする請求項20記載の方法。
【請求項23】
シングルプローブ動作または多重プローブ動作を提供できることを特徴とする請求項20から22のうちの記載のいずれか1つに記載の方法。
【請求項24】
コーティングが施されたまたはコーティングが施されていない音叉並びに他の非光学的センシング機構を使用できることを特徴とする請求項23記載の方法。
【請求項25】
同一の非光学的フィードバック装置上に新しいプローブを構成できることを特徴とする請求項24記載の方法。
【請求項26】
前記非光学的フィードバック装置の任意の方向付けには、通常の動作またはせん断力動作のための当該音叉に対して任意の角度を含むことができることを特徴とする請求項24または25記載の方法。
【請求項27】
任意の光学顕微鏡に一体化されることを特徴とする請求項20から26のうちの記載のいずれか1つに記載の方法。
【請求項28】
位相フィードバックを用いて超高感度の力分光法を実行できることを特徴とする請求項27記載の方法。
【請求項29】
ラマン分光法または非線形光学的方法などの分光技術とともに超高感度の力分光法を実行できることを特徴とする請求項27記載の方法。
【請求項30】
ラマン分光法または非線形光学的方法などの分光技術とともに超高感度の力分光法を実行できることを特徴とする請求項28記載の方法。
【請求項31】
パッチクランピング型、コンダクタンス型、電気型又は走査型電気化学顕微鏡法、もしくは、熱的伝導性、化学的蒸着又はナノ真空とともに一体化されることを特徴とする請求項26から30のうちの記載のいずれか1つに記載の方法。
【請求項32】
光学的フィードバックを用いて多重プローブ動作を可能にすることができる液体中もしくは大気中または部分的に両方でのプローブの動作を可能とさせることを特徴とする走査プローブ顕微鏡に対する方法。
【請求項33】
当該プローブがサンプルをプロービングするのと同一の側から液浸対物レンズを使用できることを特徴とする請求項32記載の方法。
【請求項34】
カンチレバー型プローブまたは直線プローブを使用できることを特徴とする請求項32記載の方法。
【請求項35】
ラマン分光法または非線形光学的方法などの分光技術とともに超高感度の力分光法を実行できることを特徴とする請求項34記載の方法。
【請求項36】
位相フィードバックを用いて超高感度の力分光法を実行できることを特徴とする請求項34または35記載の方法。
【請求項37】
任意の光学顕微鏡に一体化されることを特徴とする請求項32から36のうちの記載のいずれか1つに記載の方法。
【請求項38】
パッチクランピング型、コンダクタンス型、電気型又は走査型電気化学顕微鏡法、もしくは、熱的伝導性、化学的蒸着又はナノ真空とともに一体化されることを特徴とする請求項37記載の方法。
【請求項1】
非光学的フィードバック形成に基づいた走査プローブ顕微鏡のための装置であり、カンチレバー型または直線のプローブを含む任意のタイプのプローブを用いて、液体中もしくは大気中または部分的に両方での動作を可能とさせることを特徴とする装置。
【請求項2】
上側または下側からの干渉なしに適切な当該プローブを用いて動作できることを特徴とする請求項1記載の装置。
【請求項3】
当該プローブがサンプルをプロービングするのと同一の側から液浸対物レンズを用いてまたは用いないで動作できることを特徴とする請求項1記載の装置。
【請求項4】
シングルプローブ動作または多重プローブ動作を提供できることを特徴とする請求項1から3のうちの記載のいずれか1つに記載の装置。
【請求項5】
コーティングが施されたまたはコーティングが施されていない音叉並びに他の非光学的センシング機構を使用できることを特徴とする請求項4記載の装置。
【請求項6】
同一の非光学的フィードバック装置上に新しいプローブを構成できることを特徴とする請求項5記載の装置。
【請求項7】
前記非光学的フィードバック装置の任意の方向付けには、通常の動作またはせん断力動作のための前記音叉に対して任意の角度を含むことができることを特徴とする請求項5または6記載の装置。
【請求項8】
任意の光学顕微鏡に一体化されることを特徴とする請求項5から7のうちの記載のいずれか1つに記載の装置。
【請求項9】
位相フィードバックを用いて超高感度の力分光法を実行することができることを特徴とする請求項8記載の装置。
【請求項10】
ラマン分光法または非線形光学的方法などの分光技術とともに超高感度の力分光法を実行できることを特徴とする請求項8記載の装置。
【請求項11】
たとえば、ラマン分光法または非線形光学的方法などの分光技術とともに超高感度の力分光法を実行できることを特徴とする請求項9記載の装置。
【請求項12】
パッチクランピング型、コンダクタンス型、電気型又は走査型電気化学顕微鏡法、もしくは、熱的伝導性、化学的蒸着又はナノ真空とともに一体化されることを特徴とする請求項4から11のうちの記載のいずれか1つに記載の装置。
【請求項13】
光学的フィードバックを用いて多重プローブ動作を可能にすることができる液体中もしくは大気中または部分的に両方でのプローブの動作を可能とさせることを特徴とする走査プローブ顕微鏡に対する装置。
【請求項14】
当該プローブはサンプルをプロービングするのと同一の側から液浸対物レンズを使用することができることを特徴とする請求項13記載の装置。
【請求項15】
カンチレバー型プローブまたは直線プローブを使用できることを特徴とする請求項13記載の装置。
【請求項16】
ラマン分光法または非線形光学的方法などの分光技術とともに超高感度の力分光法を実行できることを特徴とする請求項15記載の装置。
【請求項17】
位相フィードバックを用いて超高感度の力分光法を実行できることを特徴とする請求項15または16記載の装置。
【請求項18】
任意の光学顕微鏡に一体化されることを特徴とする請求項13から17のうちの記載のいずれか1つに記載の装置。
【請求項19】
パッチクランピング型、コンダクタンス型、電気型又は走査型電気化学顕微鏡法、もしくは、熱的伝導性、化学的蒸着又はナノ真空とともに一体化されることを特徴とする請求項18記載の装置。
【請求項20】
非光学的フィードバック形成に基づいた走査プローブ顕微鏡のための方法であり、カンチレバー型または直線のプローブを含む任意のタイプのプローブを用いて、液体中もしくは大気中または部分的に両方での動作を可能とさせることを特徴とする方法。
【請求項21】
上側または下側からの干渉なしに適切な当該プローブを用いて動作できることを特徴とする請求項20記載の方法。
【請求項22】
当該プローブがサンプルをプロービングするのと同一の側から液浸対物レンズを用いてまたは用いないで動作できることを特徴とする請求項20記載の方法。
【請求項23】
シングルプローブ動作または多重プローブ動作を提供できることを特徴とする請求項20から22のうちの記載のいずれか1つに記載の方法。
【請求項24】
コーティングが施されたまたはコーティングが施されていない音叉並びに他の非光学的センシング機構を使用できることを特徴とする請求項23記載の方法。
【請求項25】
同一の非光学的フィードバック装置上に新しいプローブを構成できることを特徴とする請求項24記載の方法。
【請求項26】
前記非光学的フィードバック装置の任意の方向付けには、通常の動作またはせん断力動作のための当該音叉に対して任意の角度を含むことができることを特徴とする請求項24または25記載の方法。
【請求項27】
任意の光学顕微鏡に一体化されることを特徴とする請求項20から26のうちの記載のいずれか1つに記載の方法。
【請求項28】
位相フィードバックを用いて超高感度の力分光法を実行できることを特徴とする請求項27記載の方法。
【請求項29】
ラマン分光法または非線形光学的方法などの分光技術とともに超高感度の力分光法を実行できることを特徴とする請求項27記載の方法。
【請求項30】
ラマン分光法または非線形光学的方法などの分光技術とともに超高感度の力分光法を実行できることを特徴とする請求項28記載の方法。
【請求項31】
パッチクランピング型、コンダクタンス型、電気型又は走査型電気化学顕微鏡法、もしくは、熱的伝導性、化学的蒸着又はナノ真空とともに一体化されることを特徴とする請求項26から30のうちの記載のいずれか1つに記載の方法。
【請求項32】
光学的フィードバックを用いて多重プローブ動作を可能にすることができる液体中もしくは大気中または部分的に両方でのプローブの動作を可能とさせることを特徴とする走査プローブ顕微鏡に対する方法。
【請求項33】
当該プローブがサンプルをプロービングするのと同一の側から液浸対物レンズを使用できることを特徴とする請求項32記載の方法。
【請求項34】
カンチレバー型プローブまたは直線プローブを使用できることを特徴とする請求項32記載の方法。
【請求項35】
ラマン分光法または非線形光学的方法などの分光技術とともに超高感度の力分光法を実行できることを特徴とする請求項34記載の方法。
【請求項36】
位相フィードバックを用いて超高感度の力分光法を実行できることを特徴とする請求項34または35記載の方法。
【請求項37】
任意の光学顕微鏡に一体化されることを特徴とする請求項32から36のうちの記載のいずれか1つに記載の方法。
【請求項38】
パッチクランピング型、コンダクタンス型、電気型又は走査型電気化学顕微鏡法、もしくは、熱的伝導性、化学的蒸着又はナノ真空とともに一体化されることを特徴とする請求項37記載の方法。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】

【図2】
【図3】
【図4】
【図5】
【図6】
【公表番号】特表2012−519299(P2012−519299A)
【公表日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願番号】特願2011−552991(P2011−552991)
【出願日】平成22年2月25日(2010.2.25)
【国際出願番号】PCT/US2010/025388
【国際公開番号】WO2010/101765
【国際公開日】平成22年9月10日(2010.9.10)
【出願人】(504064294)ナノニクス・イメージング・リミテッド (2)
【氏名又は名称原語表記】NANONICS IMAGING, LTD.
【公表日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願日】平成22年2月25日(2010.2.25)
【国際出願番号】PCT/US2010/025388
【国際公開番号】WO2010/101765
【国際公開日】平成22年9月10日(2010.9.10)
【出願人】(504064294)ナノニクス・イメージング・リミテッド (2)
【氏名又は名称原語表記】NANONICS IMAGING, LTD.
[ Back to top ]