
天候情報処理システム、天候情報処理サーバ、情報処理装置
【課題】車両等の移動体へ配信すべき雨天警戒情報の検出精度の向上。
【解決手段】天候情報処理システムは、複数の情報処理装置と天候情報処理サーバを含む。各情報処理装置は、カメラ、位置検出部、風景画像に対して画像認識処理を行うことにより雲画像存在領域を検出する雲画像検出部、移動体の位置を基準として実際の雲が存在すると推測される領域を特定する雲領域直線を算出する雲領域直線算出部、雲領域直線と移動体の位置の各データを送信する天候情報送信部を含む。天候情報処理サーバは、各情報処理装置から送信される雲領域直線及び移動体の位置の各データを受信するサーバ側通信部、各データに基づいて、実際の雲が存在すると推測される領域の座標である雲領域座標を算出する雲領域座標算出部、雲領域座標を含んだ雨天警戒情報のデータを生成して各情報処理装置の各々へ送信する雨天警戒情報配信部を含む。
【解決手段】天候情報処理システムは、複数の情報処理装置と天候情報処理サーバを含む。各情報処理装置は、カメラ、位置検出部、風景画像に対して画像認識処理を行うことにより雲画像存在領域を検出する雲画像検出部、移動体の位置を基準として実際の雲が存在すると推測される領域を特定する雲領域直線を算出する雲領域直線算出部、雲領域直線と移動体の位置の各データを送信する天候情報送信部を含む。天候情報処理サーバは、各情報処理装置から送信される雲領域直線及び移動体の位置の各データを受信するサーバ側通信部、各データに基づいて、実際の雲が存在すると推測される領域の座標である雲領域座標を算出する雲領域座標算出部、雲領域座標を含んだ雨天警戒情報のデータを生成して各情報処理装置の各々へ送信する雨天警戒情報配信部を含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、天候を予測し、その予測結果を車両等の移動体へ配信する技術に関する。
【背景技術】
【0002】
特定の地域に関する天候情報を配信する技術の先行例は、例えば特開2002−62368号公報(特許文献1)や特開2004−320585号公報(特許文献2)に開示されている。特許文献1に開示された天候情報収集システム等は、車両から送出されてくるワイパーの動作情報、位置情報および速度情報をパケット網を介して受信し、これらの情報を情報収集用コンピュータで収集して各地域の降雨情報を収集し、この収集した降雨情報を情報配信用サーバにより配信するものである。また、特許文献2に開示された情報提供システム等は、ユーザー端末を所有するユーザーまたは当該ユーザーの家族が所有する車両に備えられた雨滴センサーからの検出信号を入力する入力手段と、この入力手段により入力された検出信号に基づいて降雨状態が検出された時、上記ユーザー端末に降雨状態を通知する通知手段を備える。特許文献2では、車両に備えられている雨滴センサーを利用してユーザーの自宅周辺の実際の降雨状態を検出し、その降雨状態がユーザーに通知されるので、別途降雨センサーを設けることなく雨天状態をユーザーに通知することができる旨が述べられている。
【0003】
ところで、上記した2つの先行例はいずれも車両に備わったセンサー(ワイパー動作を検出するセンサー、降雨センサー)を利用しているが、その車両は通常、移動しているため、車両の通行量が少ない場所や地域においては、ある時間帯において車両が存在しないことによる降雨情報の空白化が起こる場合がある。また、車両の通行量が少ない場合には、降雨状態の検出精度が車両の整備状態(センサーの状態)に依存してしまい、検出精度が低下する可能性もある。降雨センサーが車両外に設置されている場合には特に誤検出を生じる可能性が高まる。他方で、昨今のいわゆるゲリラ豪雨のように特定の場所でピンポイント的に起こる降雨に対しては、上記した2つの先行例では、その特定の場所を通行する車両が存在せず、または少ない場合には正確な降雨情報を得られない可能性もある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−62368号公報
【特許文献2】特開2004−320585号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明に係る具体的態様は、車両等の移動体へ配信すべき雨天警戒情報の検出精度を向上し得る技術を提供することを目的の1つとする。
【課題を解決するための手段】
【0006】
本発明に係る一態様の天候情報処理システムは、複数の移動体の各々に搭載される複数の情報処理装置と、当該情報処置装置の各々と通信可能に接続される天候情報処理サーバとを含む天候情報処理システムである。そして、複数の情報処理装置の各々は、(a)移動体の進行方向の風景画像を撮影するカメラと、(b)移動体の位置を検出する位置検出部と、(c)風景画像に対して画像認識処理を行うことにより雲画像存在領域を検出する雲画像検出部と、(d)雲画像存在領域と移動体の位置に基づいて、移動体の位置を基準として実際の雲が存在すると推測される領域を特定する雲領域直線を算出する雲領域直線算出部と、(e)雲領域直線と移動体の位置の各データを天候情報処理サーバへ送信する天候情報送信部を含む。また、天候情報処理サーバは、(f)複数の情報処理装置の各々から送信される雲領域直線及び移動体の位置の各データを受信するサーバ側通信部と、(g)雲領域直線及び移動体の位置の各データに基づいて、実際の雲が存在すると推測される領域の座標である雲領域座標を算出する雲領域座標算出部と、(h)雲領域座標を含んだ雨天警戒情報のデータを生成し、サーバ側通信部を介して当該雨天警戒情報のデータを複数の情報処理装置の各々へ送信する雨天警戒情報配信部を含む。
【0007】
上記構成によれば、移動体(例えば車両)の進行方向の風景画像を用いた画像認識処理により実際の雲が存在すると推測される領域を求めているため、車両に備わったセンサーを用いる場合のような不都合が生じない。また、複数の移動体からの情報を用いてサーバ側で実際に雲が存在すると推測される場所をスポットではなく一定の広さを有する領域として求めているので、移動体が存在しないことによる情報の空白化を回避しやすく、また移動体が少ないことによる1つの移動体からの情報への依存度を下げることもでき、ピンポイント的に発生する降雨にも対応可能となる。したがって、車両等の移動体へ配信すべき雨天警戒情報の検出精度を向上することが可能となる。
【0008】
上記の天候情報処理システムにおいて、雲画像検出部は、例えば、風景画像をマトリクス状に配列される複数のブロックに分割して当該複数のブロックの各々の雲画像の有無を判定することにより雲画像存在領域を検出することが好ましい。この場合に、雲領域直線算出部は、例えば複数のブロックに分割して検出される雲画像存在領域に基づき、カメラの画角を用いて雲領域直線の傾きを算出することができる。
【0009】
これにより、雲画像存在領域を検出する処理負荷を低減することができる。
【0010】
上記の天候情報処理システムにおいて、雲領域座標算出部は、複数の雲領域直線が相互に交わる点を雲領域座標として算出することが好ましい。
【0011】
これにより、雲領域座標を簡単に算出することができる。
【0012】
本発明に係る一態様の情報処理装置は、移動体に搭載され、かつ天候情報処理サーバと通信可能に接続される情報処理装置であって、(a)移動体の進行方向の風景画像を撮影するカメラと、(b)移動体の位置を検出する位置検出部と、(c)風景画像に対して画像認識処理を行うことにより雲画像存在領域を検出する雲画像検出部と、(d)雲画像存在領域と移動体の位置に基づいて、移動体の位置を基準として実際の雲が存在すると推測される領域を特定する雲領域直線を算出する雲領域直線算出部と、(e)雲領域直線と移動体の位置の各データを天候情報処理サーバへ送信する天候情報送信部を含む情報処理装置である。
【0013】
上記構成によれば、天候情報処理システムに適した情報処理装置が得られる。
【0014】
本発明に係る一態様の天候情報処理サーバは、複数の移動体の各々に搭載された複数の情報処理装置と通信可能に接続される天候情報処理サーバであって、(a)複数の情報処理装置の各々から送信される、移動体の位置を基準として実際の雲が存在すると推測される領域を特定する雲領域直線と移動体の位置の各データを受信するサーバ側通信部と、(b)雲領域直線及び移動体の位置の各データに基づいて、実際の雲が存在すると推測される領域の座標である雲領域座標を算出する雲領域座標算出部と、(c)雲領域座標を含んだ雨天警戒情報のデータを生成し、サーバ側通信部を介して当該雨天警戒情報のデータを複数の情報処理装置の各々へ送信する雨天警戒情報配信部を含む天候情報処理サーバである。
【0015】
上記構成によれば、天候情報処理システムに適した天候情報処理サーバが得られる。
【図面の簡単な説明】
【0016】
【図1】一実施形態の天候情報処理システムの概要を説明するための概念図である。
【図2】天候情報処理システムの詳細な構成例を示すブロック図である。
【図3】各車両の車両用情報処理装置の動作手順を示すフローチャートである。
【図4】雲画像存在領域を検出する処理の内容について説明するための概念図である。
【図5】雲領域直線の算出方法を説明するための概念図(その1)である。
【図6】雲領域直線の算出方法を説明するための概念図(その2)である。
【図7】雲領域直線の算出方法を説明するための概念図(その3)である。
【図8】雲領域直線算出部によって算出される雲領域直線の一例を示す図である。
【図9】天候情報処理サーバの動作手順を示すフローチャートである。
【図10】対象車両を設定する方法(マッチング方法)を説明するための図である。
【図11】雲領域座標を算出する処理の内容を説明するための図である。
【図12】車両用情報処理装置の動作手順を示すフローチャートである。
【発明を実施するための形態】
【0017】
以下に、本発明の実施の形態について図面を参照しながら説明する。
【0018】
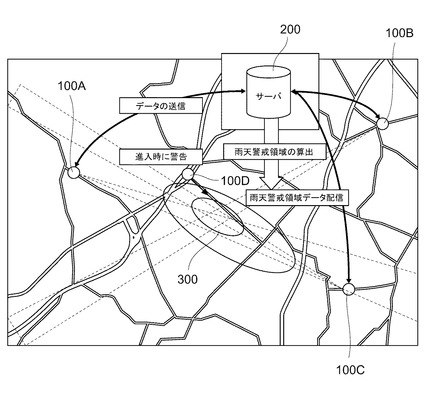
図1は、一実施形態の天候情報処理システムの概要を説明するための概念図である。本実施形態の天候情報処理システム(天候情報配信システム)は、大まかに以下の4つの手順によって、雨天の可能性が高い領域(以下「雨天警戒領域」という)を割り出して、各車両あるいはその他の移動体へ配信するシステムである。
【0019】
まず、第1ステップとして、複数の車両100A、100B、100C、100Dのそれぞれにおいて、車載されたカメラによって各車両の前方を撮影して得られる画像に基づいて雲の位置(雲の存在する方向)に関するデータが車両用情報処理装置によって求められ、このデータがネットワークを介してサーバ200へ送信される。
【0020】
第2ステップとして、サーバ200は、複数の車両100A、100B、100Cのそれぞれから送信される雲の位置に関するデータを用いて、雲の存在する領域すなわち上記した雨天警戒領域300を算出する。
【0021】
第3ステップとして、サーバ200は、ネットワークを介して雨天警戒領域300を特定するデータ(雨天警戒領域データ)を各車両100A、100B、100C、100Dへ配信する。このとき仮に、この雨天警戒領域300に存在し、かつワイパーを動作させている車両がいたならば、サーバ200は、実際に降雨中である旨を示す降雨情報データを雨天警戒領域データに付加して各車両へ配信する。
【0022】
第4ステップとして、雨天警戒領域データ等を受信した各車両100A等のうち、自車両が実際に雨天警戒領域300に存在し、又は進入すると予測される車両(図示の例では車両100D)の車両用情報処理装置は、画像表示や音声出力により運転者等に対して雨天に警戒する旨の注意喚起を行う。
【0023】
次に、上記のような天候情報処理システムの動作を実現するためのシステム構成例について詳細に説明する。
【0024】
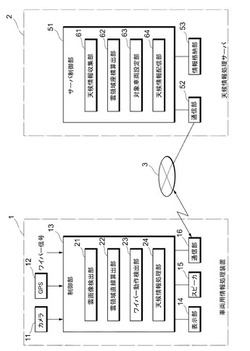
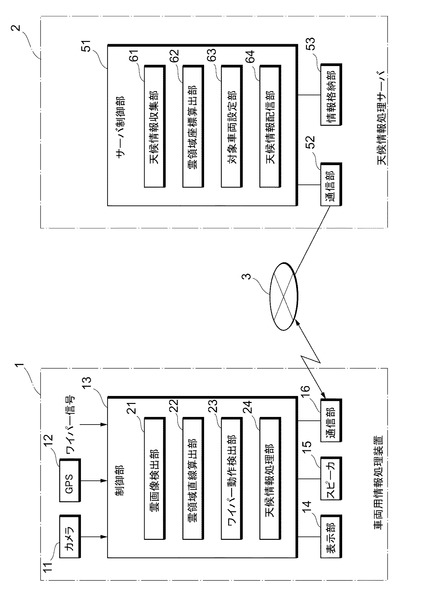
図2は、天候情報処理システムの詳細な構成例を示すブロック図である。図2に示す天候情報処理システムは、上記した各車両100A等にそれぞれ搭載される車両用情報処理装置1と、この車両用情報処理装置1とネットワーク3を介して相互に通信可能に接続された天候情報処理サーバ2を含んで構成されている。なお、この天候情報処理サーバ2は上記したサーバ200に相当する。
【0025】
車両用情報処理装置1は、カメラ11、車両位置検出部(GPS)12、制御部13、表示部14、スピーカ(音声出力手段)15および通信部16を含んで構成されている。
【0026】
カメラ11は、例えば車両のフロントガラス内側に設置されており、車両の前方の風景を撮影し、その風景画像を出力する。
【0027】
車両位置検出部12は、車両の現在位置を検出するものである。本実施形態の車両位置検出部12は、全地球測位システム(GPS:Global Positioning System)により車両の現在位置を検出する。
【0028】
制御部13は、車両用情報処理装置1の全体動作を制御するものであり、雲画像検出部21、雲領域直線算出部22、ワイパー動作検出部23および天候情報処理部24を含んで構成されている。ここで、制御部13は、例えばCPU、ROM、RAM等を含んだコンピュータにおいて所定の動作プログラムを実行することにより構成される。
【0029】
雲画像検出部21は、カメラによって撮影された車両前方の風景画像に対して所定の画像認識処理を行うことにより、雲画像が存在する領域(以下「雲画像存在領域」という)を検出する。
【0030】
雲領域直線算出部22は、雲画像検出部21によって検出された雲画像存在領域に基づいて、自車両位置を基準とし、この位置から雲の存在するものと推定される領域までを結んだ仮想的な直線である雲領域直線を算出する。
【0031】
ワイパー動作検出部23は、自車両のワイパーの動作状態を検出する。
【0032】
天候情報処理部24は、雲領域直線算出部22によって算出された雲領域直線およびワイパー動作検出部23によって生成されたワイパー動作情報の各データを天候情報データとして、通信部16を介して天候情報処理サーバ2へ送信する。また、天候情報処理部24は、天候情報処理サーバ2から送信される雨天警戒情報データを通信部16を介して受信し、これに基づいて雨天警報を示す画像を表示部14に表示させ、また雨天警報を示す音声をスピーカ15に出力させる。
【0033】
表示部14は、制御部13から供給される制御信号(画像信号)に基づいて情報表示を行うものであり、例えば液晶表示装置を用いて構成されている。この表示部14により上記した雨天警報を示す画像が表示される。
【0034】
スピーカ15は、制御部13から供給される制御信号(音声信号)に基づいて音声出力を行うものである。このスピーカ15により上記した雨天警報を示す音声が出力される。
【0035】
通信部16は、制御部13からの制御信号に基づいて、車両用情報処理装置1が天候情報処理サーバ2との間でネットワーク3を介した情報通信を行うための処理を行う。
【0036】
天候情報処理サーバ2は、サーバ制御部51、通信部52および情報格納部53を含んで構成されている。
【0037】
サーバ制御部51は、天候情報処理サーバ2の全体動作を制御するものであり、天候情報収集部61、雲領域座標算出部62、対象車両設定部63および天候情報配信部64を含んで構成されている。ここで、サーバ制御部51は、例えばCPU、ROM、RAM等を含んだコンピュータにおいて所定の動作プログラムを実行することにより構成される。
【0038】
天候情報収集部61は、各車両の車両用情報処理装置1から天候情報データが送信されると通信部52を介してこれらの天候情報データを取得し、情報格納部53へ格納する。
【0039】
雲領域座標算出部62は、各車両からの天候情報データに含まれる雲領域直線データに基づいて、マップ上において雲が存在すると推測される領域を特定する雲領域座標を算出する。
【0040】
対象車両設定部63は、天候情報データに付加されている各車両の現在位置のデータおよび進行方向の傾き角のデータを用いて、雲領域座標を算出する際に組み合わせる対象とすべき車両を設定する。
【0041】
天候情報配信部64は、通信部52を介して、雲領域座標データを雨天警戒情報データとして各車両の車両用情報処理装置1へ配信する。
【0042】
通信部(サーバ側通信部)52は、サーバ制御部51からの制御信号に基づいて、天候情報処理サーバ2が車両用情報処理装置1との間でネットワーク3を介した情報通信を行うための処理を行う。
【0043】
情報格納部53は、車両用情報処理装置1から送信されるデータ等を格納する。この情報格納部53は、例えば不揮発性メモリからなる。
【0044】
本実施形態の天候情報処理システムはこのような構成を備えており、次にその動作について詳細に説明する。
【0045】
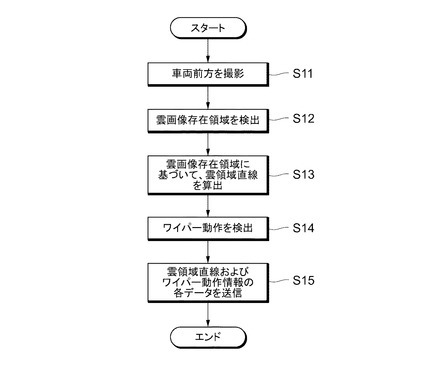
始めに、各車両の車両用情報処理装置1が雲の位置等に関するデータを求め、それを天候情報処理サーバ2へ送信する際の動作手順を説明する。図3は、各車両の車両用情報処理装置の動作手順を示すフローチャートである。
【0046】
カメラ11により車両前方の風景画像が撮影されると(ステップS11)、雲画像検出部21は、このカメラ11に撮影された風景画像に対して画像認識処理を行うことにより雲画像存在領域を検出する(ステップS12)。
【0047】
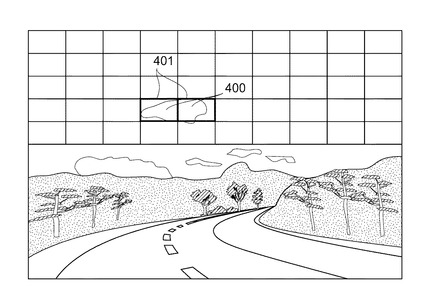
図4は、雲画像存在領域を検出する処理の内容について説明するための概念図である。雲画像検出部21は、図4のような風景画像に対し、空に対応する領域(以下「空領域」)を設定し、この空領域をマトリクス状に配列された複数ブロックに分割する。ここでは例えば、図示のように風景画像の上半分の領域を空領域と設定する。これは、車両前方の風景内において上側に存在する雲は相対的に近い距離にあり天候予測に有用な情報源となり得るのに対して、風景内において下側に存在する雲は相対的に遠い距離にあると考えられるからである。このようにすることで、空領域を簡便に設定できるとともに、かつ車両から近距離にあり相対的に重要度の高い雲の存在を確実に検出し、相対的に重要度の低い遠距離の雲の存在を検出されないようにして、雲画像の検出に要する処理負荷を軽減することができる。なお、空領域の設定方法はこれに限らず、例えば空と地表の色調の違いを検出することによって領域を区分けしてもよい。
【0048】
雲画像検出部21は、設定した空領域の複数ブロックのそれぞれについて画像認識処理を行うことにより、雲画像の存在するブロックを検出する。図示の例では、雲画像400の存在するブロックとして2つのブロック401が検出されている。すなわち、本実施形態では雲画像が存在すると判定された各ブロック401が雲画像存在領域に相当する。なお、雲画像の検出方法については種々考えられる。一般に、積乱雲等の雨雲は縦長構造であり雲同士が重なり合っていることから輝度および彩度が低いので、例えば風景画像の空領域に対して輝度フィルタをかけて、ある値よりも低い場合には雲画像であると判定することができる。また、空領域に輝度フィルタをかけて、ある値よりも低い領域の輪郭を求め、その輪郭内を雲画像であると判定してもよい。さらに、例えば、各ブロック内において雲画像の占める面積の割合が一定以上(例えば30%以上)の場合にのみ、そのブロックに雲画像が存在すると判定してもよい。これにより、小面積の雲画像が存在するブロックを処理対象から割愛し、サーバ側の処理負荷を軽減することができる。
【0049】
次に、雲領域直線算出部22は、雲画像検出部21によって検出された雲画像存在領域に基づいて、自車両位置から雲の存在するものと推定される領域までを結んだ直線である雲領域直線を算出する(ステップS13)。
【0050】
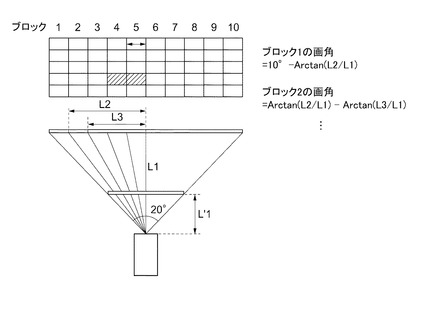
図5は、雲領域直線の算出方法を説明するための概念図(その1)である。まず、雲領域直線算出部22は、風景画像に設定された空領域について1ブロックあたりの画角を求める(キャリブレーション)。例えば、カメラ11の画角が20°であるとすると、1列目のブロック(ブロック1)の画角θ1は、10°−Arctan(L2/L1)と求められる。また、2列目のブロック(ブロック2)の画角θ2は、Arctan(L2/L1)−Arctan(L3/L1)と求められる。上記の図4に例示した雲画像存在領域(各ブロック401)は、図5において網掛け模様で示すように4列目、5列目の各4行目のブロックに相当する。ただし、原理上は上記により各ブロックの画角を求められるものの実際にはL1は略無限長となることから演算が難しい。そこで、本実施形態では、実際の風景画像と対称性を有する仮想画像を用いることで以下のように各ブロックの画角を求める。例えば、車両位置から仮想画像までの距離を有限長L’1とする。例えばこのL’1を30mとすると、カメラ11の画角が20°であることから、ブロック1〜5までの幅は5.29m(=30m×tan10°)と算出できる。これにより、ブロック1つ当たりの幅は1.058m(=5.29m/5)と算出できる。したがって、有限長L’1の値、水平方向に配列されたブロック数、ブロック1つ当たりの幅を予めパラメータとして持っておけば、各ブロックの画角を求めることができる。
例えば、2列目のブロックの画角θ2は以下のように求められる。
θ2=Arctan(L2/L1)−Arctan(L3/L1)
=Arctan(4.232/30)−Arctan(3.17/30)
=0.140−0.105[rad]
=2[deg]
【0051】
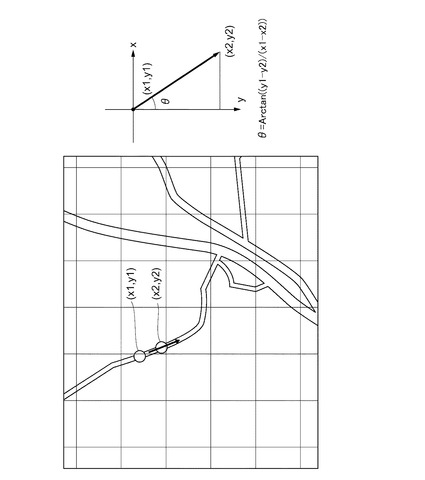
図6は、雲領域直線の算出方法を説明するための概念図(その2)である。図6に示すように、雲領域直線算出部22は、車両位置検出部12によって検出される現在の車両位置(x2,y2)と、その直前(所定期間だけ過去)の車両位置(x1,y1)の各座標に基づいて、自車両のマップ上における進行方向(傾き)を求める。具体的には、雲領域直線算出部22は、マップ(地表面)のxy座標におけるy軸からの傾き角θを自車両の進行方向として求める。この傾き角θは、Arctan((y1−y2)/(x1−x2))を計算することで得られる。
【0052】
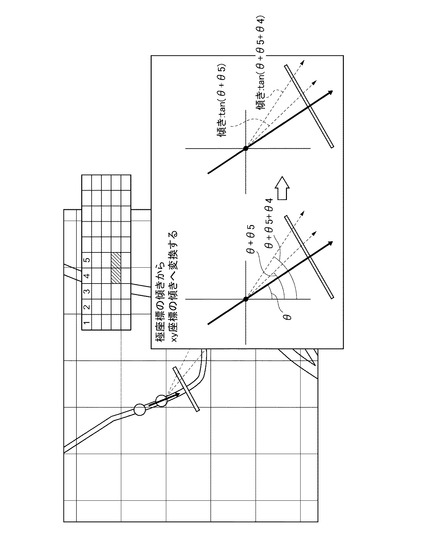
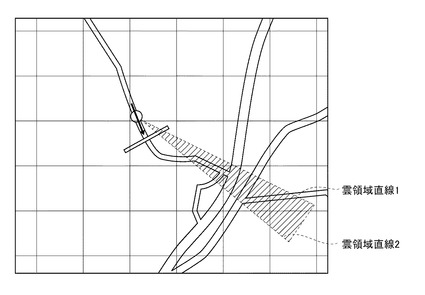
図7は、雲領域直線の算出方法を説明するための概念図(その3)である。図7に示すように、雲領域直線算出部22は、上記したマップ上における自車両の傾き角θに対して、雲画像存在領域である各ブロック401の画角を合成し、さらにこれをxy座標上における傾き(一次式y=ax+bにおける傾きa)に変換する。上記の例では4列目と5列目の各ブロック401の画角をそれぞれθ4、θ5とすれば、xy画像上における傾きaはtan(θ+θ5+θ4)と表される。また、切片bについては、自車両の現在の車両位置(x2,y2)と傾きaから求めることができる。このようにして、自車両の現在の車両位置と、雲画像存在領域である2つのブロック401の全体における一端および他端のそれぞれを結ぶ仮想的な直線である2つの雲領域直線が算出される。図8は、雲領域直線算出部によって算出される雲領域直線の一例を示す図である。図示のように、自車両の現在位置から延びる2つの雲領域直線1、2が求められる。
【0053】
次に、ワイパー動作検出部23は、例えば自車両から得られるワイパー信号を用いて、ワイパーの動作状態を検出する(ステップS14)。ワイパー動作検出部23は、ワイパーが動作中である場合にはその旨を示すワイパー動作情報を生成する。このワイパー動作情報は、天候情報処理サーバ2側において、その車両の存在する場所で降雨していることを示す情報(降雨情報)として活用することができる。なお、フロントガラス洗浄等の一時的なワイパー動作などの降雨とは無関係なワイパー動作を排除するために、ワイパー動作検出部23は、一定時間に亘り継続的にワイパーが動作中である場合にワイパー動作情報を生成するようにしてもよい。
【0054】
次に、天候情報処理部24は、雲領域直線算出部23によって算出された雲領域直線およびワイパー動作検出部23によって生成されたワイパー動作情報の各データを天候情報データとして、通信部16を介して天候情報処理サーバ2へ送信する(ステップS15)。なお、雲領域直線については、傾きaと切片bの各データのみ送信することで足りる。また、本実施形態では、自車両の現在の車両位置(x2,y2)のデータおよび自車両の進行方向を示す傾き角θのデータも天候情報データに付加して送信される。なお、ワイパーが動作中ではなくワイパー動作情報が生成されていない場合には、ワイパー動作情報は送信されない。天候情報処理部24によって送信された天候情報データはネットワーク3を介して天候情報処理サーバ2で受信される。
【0055】
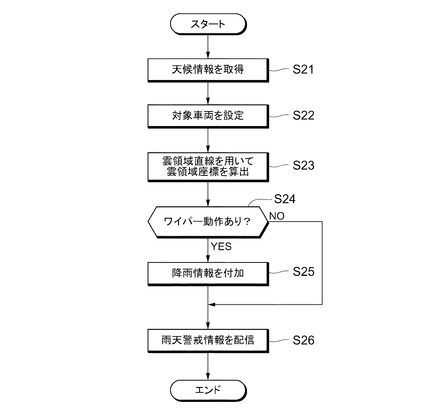
以上のようにして各車両から天候情報処理サーバ2へ天候情報データが送信される。次に、天候情報処理サーバ2が車両用情報処理装置1から送信された雲の位置等に関するデータを用いて雨天警戒領域データを求め、それを各車両の車両用情報処理装置1へ送信する際の動作手順を説明する。図9は、天候情報処理サーバの動作手順を示すフローチャートである。
【0056】
各車両の車両用情報処理装置1から天候情報データが送信されると、天候情報収集部61は通信部52を介してこれらの天候情報データを取得し、情報格納部53へ格納する(ステップS21)。例えば、これらの天候情報データはその取得時期に応じた時系列データ(典型的には時刻データ)と紐付けして情報格納部53へ格納される。
【0057】
次に、対象車両設定部63は、天候情報データに付加されている各車両の現在の車両位置のデータおよび進行方向の傾き角θのデータを用いて、雲領域座標を算出する際に組み合わせる対象とすべき車両を設定する(ステップS22)。
【0058】
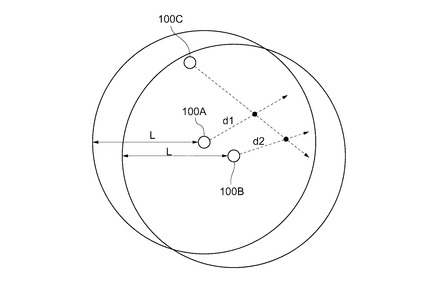
図10は、対象車両を設定する方法(マッチング方法)を説明するための図である。各車両の進行方向の傾きは、傾き角θを用いてtanθを算出することで求められる。対象車両設定部63は、ある1つの車両を任意に決めて、この車両から所定距離Lを半径とする円内に存在し、かつ進行方向が互いに半径Lの円内で交わる別の車両を対象車両として設定する。例えば、図示の車両100Aを基準とすると、この車両100Aから半径Lの円内に存在し、かつ進行方向が交わる車両100Cは対象車両として設定されるが、進行方向が交わらない車両100Bは対象車両として設定されない。また、図示の車両100Bを基準とすると、この車両100Bから半径Lの円内に存在し、かつ進行方向が交わる車両100Cが対象車両として設定されるが、進行方向が交わらない車両100Aは対象車両として設定されない。なお、各車両の相互間距離が一定の基準値よりも小さい場合、すなわち車両間が近接している場合には、それらの車両同士を上記したマッチングの対象から除外することも好ましい。これは、近接した車両同士をマッチングさせると、雲領域座標の検出精度が低下する場合があるからである。
【0059】
次に、雲領域座標算出部62は、情報格納部53に格納された各天候情報データに含まれる雲領域直線データ(傾きaおよび切片bの各データ)に基づいて、マップ上において雲が存在すると推測される領域を特定する雲領域座標を算出する(ステップS23)。ここでは、ステップS22において対象車両として設定された2以上の車両の雲領域直線データを用いて雲領域座標が算出される。それにより、雲領域座標の算出精度が高まる。
【0060】
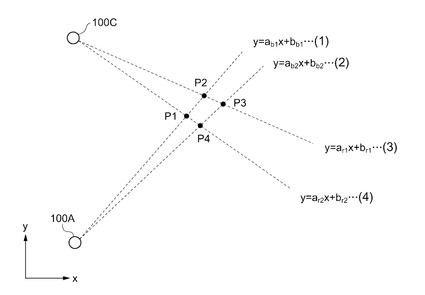
図11は、雲領域座標を算出する処理の内容を説明するための図である。車両100Aの車両用情報処理装置1から送信された雲領域直線が図示のようにy=ab1x+bb1(式1)、y=ab2x+bb2(式2)、とそれぞれ表され、車両100Cの車両用情報処理装置1から送信された雲領域直線が図示のようにy=ar1x+br1(式3)、y=ar2x+br2(式4)、とそれぞれ表されるものとする。この場合、各式1〜4を用いることにより、これらの各交点P1、P2、P3、P4を求めることができる。具体的には、式1と式4に基づき交点P1が求まり、式1と式3に基づき交点P2が求まり、式2と式3に基づき交点P3が求まり、式2と式4に基づき交点P4が求まる。このようにして求められた各交点P1〜P4によって画定される領域が雲領域であり、各交点P1〜P4の座標が雲領域座標となる。
【0061】
次に、天候情報配信部64は、ワイパー動作情報および各車両の車両位置の各データに基づいて、雲領域座標算出部62によって算出された雲領域座標により特定される雲領域内に存在する車両がワイパーを動作させているか否かを判定する(ステップS23)。
【0062】
雲領域内の車両がワイパーを動作させている場合(ステップS24;YES)、天候情報配信部64は、上記した雲領域座標のデータに降雨情報データを付加する(ステップS24)。また、雲領域内の車両がワイパーを動作させていない場合(ステップS23;NO)、天候情報配信部64は、降雨情報データを付加しない。
【0063】
次に、天候情報配信部64は、通信部52を介して、雲領域座標データを雨天警戒情報データとして各車両の車両用情報処理装置1へ配信する(ステップS25)。配信された雨天警戒情報データはネットワーク3を介して各車両の車両用情報処理装置1で受信される。
【0064】
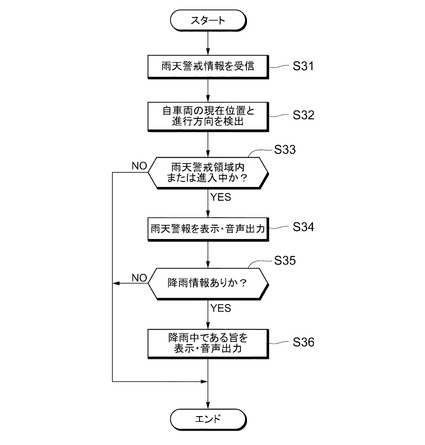
以上のようにして各車両へ雨天警戒情報データが配信される。次に、車両用情報処理装置1が雨天警戒情報データに基づいて雨天警戒警報を車両の搭乗者に通知する際の動作手順を説明する。図12は、車両用情報処理装置の動作手順を示すフローチャートである。
【0065】
天候情報処理サーバ2から雨天警戒情報データが送信されると、天候情報処理部24は通信部16を介してこの雨天警戒情報データを受信する(ステップS31)。
【0066】
次に、天候情報処理部24は、車両位置検出部12によって検出される自車両の位置(現在および過去)に基づいて、自車両の現在位置と進行方向を検出する(ステップS32)。なお、自車両の現在位置と進行方向は雲領域直線を算出する際にも求められているので、そのデータを利用してもよい。
【0067】
次に、天候情報処理部24は、自車両の現在の車両位置が雲領域座標によって特定される雨天警戒領域内であるか、またはこの雨天警戒領域に進入中、すなわち近い未来に進入すると予測される状態であるかを判定する(ステップS33)。
【0068】
自車両の現在の車両位置が雨天警戒領域内であり、またはそこへ進入中である場合には(ステップS33;YES)、天候情報処理部24は、表示部14およびスピーカ15にそれぞれ制御信号を与えることにより、雨天警報を示す画像を表示させ、音声を出力させる(ステップS34)。
【0069】
また、天候情報処理部24は、天候情報データに降雨情報が含まれるか否かを判定する(ステップS35)。降雨情報が含まれる場合には(ステップS35;YES)、雨天警戒領域内が実際に降雨状態であると予測されるので、天候情報処理部24は、表示部14およびスピーカ15にそれぞれ制御信号を与えることにより、降雨中であることを示す画像を表示させ、音声を出力させる(ステップS36)。
【0070】
なお、自車両の現在の車両位置が雨天警戒領域内ではなく、進入中でもない場合には(ステップS33;NO)、天候情報処理部24は、上記したステップS34〜ステップS36の処理を実行しない。また、天候情報データに降雨情報が含まれない場合には(ステップS35;NO)、天候情報処理部24は、上記したステップS36の処理を実行しない。
【0071】
以上のような本実施形態によれば、車両の進行方向の風景画像を用いた画像認識処理により実際の雲が存在すると推測される領域を求めているため、車両に備わったセンサーを用いる場合のような不都合が生じない。また、複数の車両からの情報を用いてサーバ側で実際に雲が存在すると推測される場所をスポットではなく一定の広さを有する領域として求めているので、車両が存在しないことによる情報の空白化を回避しやすく、また車両が少ないことによる1つの車両からの情報への依存度を下げることができ、ピンポイント的に発生する降雨にも対応可能となる。したがって、各車両へ配信すべき雨天警戒情報の検出精度を向上することが可能となる。
【0072】
なお、本発明は上述した実施形態の内容に限定されるものではなく、本発明の要旨の範囲内において種々に変形して実施をすることが可能である。例えば、上記した実施形態における車両用情報処理装置は、その構成の一部または全部が車両用のナビゲーション装置に組み込まれていてもよい。また、上記した実施形態では移動体の具体例として車両を挙げていたがこれに限定されず、例えば鉄道、船舶、航空機等の移動体に情報処理装置が搭載されていてもよい。
【0073】
また、上記した実施形態では、各車両用情報処理装置1に対して雨天警戒領域のデータが送信され、各々の車両用情報処理装置1にて警報の要否を判断していたが、天候情報処理サーバ2側で警報の必要な車両を特定し、当該車両の車両用情報処理装置1へ選択的に雨天警戒領域のデータを送信し、または警報の要否を示すデータを送信してもよい。この場合には、各車両用情報処理装置1から送信された車両の進行方向および現在位置の各データに基づいて、各車両の現在位置が雲領域座標によって特定される雨天警戒領域内であるか、またはこの雨天警戒領域に進入中であるかを天候情報処理サーバ2の天候情報配信部64が判定し、必要な車両の車両用情報処理装置1に対して雨天警戒領域のデータまたは警報の要否を示すデータを送信すればよい。
【符号の説明】
【0074】
1:車両用情報処理装置
2:天候情報処理サーバ
3:ネットワーク
11:カメラ
12:車両位置検出部(GPS)
13:制御部
14:表示部
15:スピーカ(音声出力手段)
16:通信部
21:雲画像検出部
22:雲領域直線算出部
23:ワイパー動作検出部
24:天候情報処理部
51:サーバ制御部
52:通信部
53:情報格納部
61:天候情報収集部
62:雲領域座標算出部
63:対象車両設定部
64:天候情報配信部
100A、100B、100C、100D:車両
200:サーバ
300:雨天警戒領域
【技術分野】
【0001】
本発明は、天候を予測し、その予測結果を車両等の移動体へ配信する技術に関する。
【背景技術】
【0002】
特定の地域に関する天候情報を配信する技術の先行例は、例えば特開2002−62368号公報(特許文献1)や特開2004−320585号公報(特許文献2)に開示されている。特許文献1に開示された天候情報収集システム等は、車両から送出されてくるワイパーの動作情報、位置情報および速度情報をパケット網を介して受信し、これらの情報を情報収集用コンピュータで収集して各地域の降雨情報を収集し、この収集した降雨情報を情報配信用サーバにより配信するものである。また、特許文献2に開示された情報提供システム等は、ユーザー端末を所有するユーザーまたは当該ユーザーの家族が所有する車両に備えられた雨滴センサーからの検出信号を入力する入力手段と、この入力手段により入力された検出信号に基づいて降雨状態が検出された時、上記ユーザー端末に降雨状態を通知する通知手段を備える。特許文献2では、車両に備えられている雨滴センサーを利用してユーザーの自宅周辺の実際の降雨状態を検出し、その降雨状態がユーザーに通知されるので、別途降雨センサーを設けることなく雨天状態をユーザーに通知することができる旨が述べられている。
【0003】
ところで、上記した2つの先行例はいずれも車両に備わったセンサー(ワイパー動作を検出するセンサー、降雨センサー)を利用しているが、その車両は通常、移動しているため、車両の通行量が少ない場所や地域においては、ある時間帯において車両が存在しないことによる降雨情報の空白化が起こる場合がある。また、車両の通行量が少ない場合には、降雨状態の検出精度が車両の整備状態(センサーの状態)に依存してしまい、検出精度が低下する可能性もある。降雨センサーが車両外に設置されている場合には特に誤検出を生じる可能性が高まる。他方で、昨今のいわゆるゲリラ豪雨のように特定の場所でピンポイント的に起こる降雨に対しては、上記した2つの先行例では、その特定の場所を通行する車両が存在せず、または少ない場合には正確な降雨情報を得られない可能性もある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−62368号公報
【特許文献2】特開2004−320585号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明に係る具体的態様は、車両等の移動体へ配信すべき雨天警戒情報の検出精度を向上し得る技術を提供することを目的の1つとする。
【課題を解決するための手段】
【0006】
本発明に係る一態様の天候情報処理システムは、複数の移動体の各々に搭載される複数の情報処理装置と、当該情報処置装置の各々と通信可能に接続される天候情報処理サーバとを含む天候情報処理システムである。そして、複数の情報処理装置の各々は、(a)移動体の進行方向の風景画像を撮影するカメラと、(b)移動体の位置を検出する位置検出部と、(c)風景画像に対して画像認識処理を行うことにより雲画像存在領域を検出する雲画像検出部と、(d)雲画像存在領域と移動体の位置に基づいて、移動体の位置を基準として実際の雲が存在すると推測される領域を特定する雲領域直線を算出する雲領域直線算出部と、(e)雲領域直線と移動体の位置の各データを天候情報処理サーバへ送信する天候情報送信部を含む。また、天候情報処理サーバは、(f)複数の情報処理装置の各々から送信される雲領域直線及び移動体の位置の各データを受信するサーバ側通信部と、(g)雲領域直線及び移動体の位置の各データに基づいて、実際の雲が存在すると推測される領域の座標である雲領域座標を算出する雲領域座標算出部と、(h)雲領域座標を含んだ雨天警戒情報のデータを生成し、サーバ側通信部を介して当該雨天警戒情報のデータを複数の情報処理装置の各々へ送信する雨天警戒情報配信部を含む。
【0007】
上記構成によれば、移動体(例えば車両)の進行方向の風景画像を用いた画像認識処理により実際の雲が存在すると推測される領域を求めているため、車両に備わったセンサーを用いる場合のような不都合が生じない。また、複数の移動体からの情報を用いてサーバ側で実際に雲が存在すると推測される場所をスポットではなく一定の広さを有する領域として求めているので、移動体が存在しないことによる情報の空白化を回避しやすく、また移動体が少ないことによる1つの移動体からの情報への依存度を下げることもでき、ピンポイント的に発生する降雨にも対応可能となる。したがって、車両等の移動体へ配信すべき雨天警戒情報の検出精度を向上することが可能となる。
【0008】
上記の天候情報処理システムにおいて、雲画像検出部は、例えば、風景画像をマトリクス状に配列される複数のブロックに分割して当該複数のブロックの各々の雲画像の有無を判定することにより雲画像存在領域を検出することが好ましい。この場合に、雲領域直線算出部は、例えば複数のブロックに分割して検出される雲画像存在領域に基づき、カメラの画角を用いて雲領域直線の傾きを算出することができる。
【0009】
これにより、雲画像存在領域を検出する処理負荷を低減することができる。
【0010】
上記の天候情報処理システムにおいて、雲領域座標算出部は、複数の雲領域直線が相互に交わる点を雲領域座標として算出することが好ましい。
【0011】
これにより、雲領域座標を簡単に算出することができる。
【0012】
本発明に係る一態様の情報処理装置は、移動体に搭載され、かつ天候情報処理サーバと通信可能に接続される情報処理装置であって、(a)移動体の進行方向の風景画像を撮影するカメラと、(b)移動体の位置を検出する位置検出部と、(c)風景画像に対して画像認識処理を行うことにより雲画像存在領域を検出する雲画像検出部と、(d)雲画像存在領域と移動体の位置に基づいて、移動体の位置を基準として実際の雲が存在すると推測される領域を特定する雲領域直線を算出する雲領域直線算出部と、(e)雲領域直線と移動体の位置の各データを天候情報処理サーバへ送信する天候情報送信部を含む情報処理装置である。
【0013】
上記構成によれば、天候情報処理システムに適した情報処理装置が得られる。
【0014】
本発明に係る一態様の天候情報処理サーバは、複数の移動体の各々に搭載された複数の情報処理装置と通信可能に接続される天候情報処理サーバであって、(a)複数の情報処理装置の各々から送信される、移動体の位置を基準として実際の雲が存在すると推測される領域を特定する雲領域直線と移動体の位置の各データを受信するサーバ側通信部と、(b)雲領域直線及び移動体の位置の各データに基づいて、実際の雲が存在すると推測される領域の座標である雲領域座標を算出する雲領域座標算出部と、(c)雲領域座標を含んだ雨天警戒情報のデータを生成し、サーバ側通信部を介して当該雨天警戒情報のデータを複数の情報処理装置の各々へ送信する雨天警戒情報配信部を含む天候情報処理サーバである。
【0015】
上記構成によれば、天候情報処理システムに適した天候情報処理サーバが得られる。
【図面の簡単な説明】
【0016】
【図1】一実施形態の天候情報処理システムの概要を説明するための概念図である。
【図2】天候情報処理システムの詳細な構成例を示すブロック図である。
【図3】各車両の車両用情報処理装置の動作手順を示すフローチャートである。
【図4】雲画像存在領域を検出する処理の内容について説明するための概念図である。
【図5】雲領域直線の算出方法を説明するための概念図(その1)である。
【図6】雲領域直線の算出方法を説明するための概念図(その2)である。
【図7】雲領域直線の算出方法を説明するための概念図(その3)である。
【図8】雲領域直線算出部によって算出される雲領域直線の一例を示す図である。
【図9】天候情報処理サーバの動作手順を示すフローチャートである。
【図10】対象車両を設定する方法(マッチング方法)を説明するための図である。
【図11】雲領域座標を算出する処理の内容を説明するための図である。
【図12】車両用情報処理装置の動作手順を示すフローチャートである。
【発明を実施するための形態】
【0017】
以下に、本発明の実施の形態について図面を参照しながら説明する。
【0018】
図1は、一実施形態の天候情報処理システムの概要を説明するための概念図である。本実施形態の天候情報処理システム(天候情報配信システム)は、大まかに以下の4つの手順によって、雨天の可能性が高い領域(以下「雨天警戒領域」という)を割り出して、各車両あるいはその他の移動体へ配信するシステムである。
【0019】
まず、第1ステップとして、複数の車両100A、100B、100C、100Dのそれぞれにおいて、車載されたカメラによって各車両の前方を撮影して得られる画像に基づいて雲の位置(雲の存在する方向)に関するデータが車両用情報処理装置によって求められ、このデータがネットワークを介してサーバ200へ送信される。
【0020】
第2ステップとして、サーバ200は、複数の車両100A、100B、100Cのそれぞれから送信される雲の位置に関するデータを用いて、雲の存在する領域すなわち上記した雨天警戒領域300を算出する。
【0021】
第3ステップとして、サーバ200は、ネットワークを介して雨天警戒領域300を特定するデータ(雨天警戒領域データ)を各車両100A、100B、100C、100Dへ配信する。このとき仮に、この雨天警戒領域300に存在し、かつワイパーを動作させている車両がいたならば、サーバ200は、実際に降雨中である旨を示す降雨情報データを雨天警戒領域データに付加して各車両へ配信する。
【0022】
第4ステップとして、雨天警戒領域データ等を受信した各車両100A等のうち、自車両が実際に雨天警戒領域300に存在し、又は進入すると予測される車両(図示の例では車両100D)の車両用情報処理装置は、画像表示や音声出力により運転者等に対して雨天に警戒する旨の注意喚起を行う。
【0023】
次に、上記のような天候情報処理システムの動作を実現するためのシステム構成例について詳細に説明する。
【0024】
図2は、天候情報処理システムの詳細な構成例を示すブロック図である。図2に示す天候情報処理システムは、上記した各車両100A等にそれぞれ搭載される車両用情報処理装置1と、この車両用情報処理装置1とネットワーク3を介して相互に通信可能に接続された天候情報処理サーバ2を含んで構成されている。なお、この天候情報処理サーバ2は上記したサーバ200に相当する。
【0025】
車両用情報処理装置1は、カメラ11、車両位置検出部(GPS)12、制御部13、表示部14、スピーカ(音声出力手段)15および通信部16を含んで構成されている。
【0026】
カメラ11は、例えば車両のフロントガラス内側に設置されており、車両の前方の風景を撮影し、その風景画像を出力する。
【0027】
車両位置検出部12は、車両の現在位置を検出するものである。本実施形態の車両位置検出部12は、全地球測位システム(GPS:Global Positioning System)により車両の現在位置を検出する。
【0028】
制御部13は、車両用情報処理装置1の全体動作を制御するものであり、雲画像検出部21、雲領域直線算出部22、ワイパー動作検出部23および天候情報処理部24を含んで構成されている。ここで、制御部13は、例えばCPU、ROM、RAM等を含んだコンピュータにおいて所定の動作プログラムを実行することにより構成される。
【0029】
雲画像検出部21は、カメラによって撮影された車両前方の風景画像に対して所定の画像認識処理を行うことにより、雲画像が存在する領域(以下「雲画像存在領域」という)を検出する。
【0030】
雲領域直線算出部22は、雲画像検出部21によって検出された雲画像存在領域に基づいて、自車両位置を基準とし、この位置から雲の存在するものと推定される領域までを結んだ仮想的な直線である雲領域直線を算出する。
【0031】
ワイパー動作検出部23は、自車両のワイパーの動作状態を検出する。
【0032】
天候情報処理部24は、雲領域直線算出部22によって算出された雲領域直線およびワイパー動作検出部23によって生成されたワイパー動作情報の各データを天候情報データとして、通信部16を介して天候情報処理サーバ2へ送信する。また、天候情報処理部24は、天候情報処理サーバ2から送信される雨天警戒情報データを通信部16を介して受信し、これに基づいて雨天警報を示す画像を表示部14に表示させ、また雨天警報を示す音声をスピーカ15に出力させる。
【0033】
表示部14は、制御部13から供給される制御信号(画像信号)に基づいて情報表示を行うものであり、例えば液晶表示装置を用いて構成されている。この表示部14により上記した雨天警報を示す画像が表示される。
【0034】
スピーカ15は、制御部13から供給される制御信号(音声信号)に基づいて音声出力を行うものである。このスピーカ15により上記した雨天警報を示す音声が出力される。
【0035】
通信部16は、制御部13からの制御信号に基づいて、車両用情報処理装置1が天候情報処理サーバ2との間でネットワーク3を介した情報通信を行うための処理を行う。
【0036】
天候情報処理サーバ2は、サーバ制御部51、通信部52および情報格納部53を含んで構成されている。
【0037】
サーバ制御部51は、天候情報処理サーバ2の全体動作を制御するものであり、天候情報収集部61、雲領域座標算出部62、対象車両設定部63および天候情報配信部64を含んで構成されている。ここで、サーバ制御部51は、例えばCPU、ROM、RAM等を含んだコンピュータにおいて所定の動作プログラムを実行することにより構成される。
【0038】
天候情報収集部61は、各車両の車両用情報処理装置1から天候情報データが送信されると通信部52を介してこれらの天候情報データを取得し、情報格納部53へ格納する。
【0039】
雲領域座標算出部62は、各車両からの天候情報データに含まれる雲領域直線データに基づいて、マップ上において雲が存在すると推測される領域を特定する雲領域座標を算出する。
【0040】
対象車両設定部63は、天候情報データに付加されている各車両の現在位置のデータおよび進行方向の傾き角のデータを用いて、雲領域座標を算出する際に組み合わせる対象とすべき車両を設定する。
【0041】
天候情報配信部64は、通信部52を介して、雲領域座標データを雨天警戒情報データとして各車両の車両用情報処理装置1へ配信する。
【0042】
通信部(サーバ側通信部)52は、サーバ制御部51からの制御信号に基づいて、天候情報処理サーバ2が車両用情報処理装置1との間でネットワーク3を介した情報通信を行うための処理を行う。
【0043】
情報格納部53は、車両用情報処理装置1から送信されるデータ等を格納する。この情報格納部53は、例えば不揮発性メモリからなる。
【0044】
本実施形態の天候情報処理システムはこのような構成を備えており、次にその動作について詳細に説明する。
【0045】
始めに、各車両の車両用情報処理装置1が雲の位置等に関するデータを求め、それを天候情報処理サーバ2へ送信する際の動作手順を説明する。図3は、各車両の車両用情報処理装置の動作手順を示すフローチャートである。
【0046】
カメラ11により車両前方の風景画像が撮影されると(ステップS11)、雲画像検出部21は、このカメラ11に撮影された風景画像に対して画像認識処理を行うことにより雲画像存在領域を検出する(ステップS12)。
【0047】
図4は、雲画像存在領域を検出する処理の内容について説明するための概念図である。雲画像検出部21は、図4のような風景画像に対し、空に対応する領域(以下「空領域」)を設定し、この空領域をマトリクス状に配列された複数ブロックに分割する。ここでは例えば、図示のように風景画像の上半分の領域を空領域と設定する。これは、車両前方の風景内において上側に存在する雲は相対的に近い距離にあり天候予測に有用な情報源となり得るのに対して、風景内において下側に存在する雲は相対的に遠い距離にあると考えられるからである。このようにすることで、空領域を簡便に設定できるとともに、かつ車両から近距離にあり相対的に重要度の高い雲の存在を確実に検出し、相対的に重要度の低い遠距離の雲の存在を検出されないようにして、雲画像の検出に要する処理負荷を軽減することができる。なお、空領域の設定方法はこれに限らず、例えば空と地表の色調の違いを検出することによって領域を区分けしてもよい。
【0048】
雲画像検出部21は、設定した空領域の複数ブロックのそれぞれについて画像認識処理を行うことにより、雲画像の存在するブロックを検出する。図示の例では、雲画像400の存在するブロックとして2つのブロック401が検出されている。すなわち、本実施形態では雲画像が存在すると判定された各ブロック401が雲画像存在領域に相当する。なお、雲画像の検出方法については種々考えられる。一般に、積乱雲等の雨雲は縦長構造であり雲同士が重なり合っていることから輝度および彩度が低いので、例えば風景画像の空領域に対して輝度フィルタをかけて、ある値よりも低い場合には雲画像であると判定することができる。また、空領域に輝度フィルタをかけて、ある値よりも低い領域の輪郭を求め、その輪郭内を雲画像であると判定してもよい。さらに、例えば、各ブロック内において雲画像の占める面積の割合が一定以上(例えば30%以上)の場合にのみ、そのブロックに雲画像が存在すると判定してもよい。これにより、小面積の雲画像が存在するブロックを処理対象から割愛し、サーバ側の処理負荷を軽減することができる。
【0049】
次に、雲領域直線算出部22は、雲画像検出部21によって検出された雲画像存在領域に基づいて、自車両位置から雲の存在するものと推定される領域までを結んだ直線である雲領域直線を算出する(ステップS13)。
【0050】
図5は、雲領域直線の算出方法を説明するための概念図(その1)である。まず、雲領域直線算出部22は、風景画像に設定された空領域について1ブロックあたりの画角を求める(キャリブレーション)。例えば、カメラ11の画角が20°であるとすると、1列目のブロック(ブロック1)の画角θ1は、10°−Arctan(L2/L1)と求められる。また、2列目のブロック(ブロック2)の画角θ2は、Arctan(L2/L1)−Arctan(L3/L1)と求められる。上記の図4に例示した雲画像存在領域(各ブロック401)は、図5において網掛け模様で示すように4列目、5列目の各4行目のブロックに相当する。ただし、原理上は上記により各ブロックの画角を求められるものの実際にはL1は略無限長となることから演算が難しい。そこで、本実施形態では、実際の風景画像と対称性を有する仮想画像を用いることで以下のように各ブロックの画角を求める。例えば、車両位置から仮想画像までの距離を有限長L’1とする。例えばこのL’1を30mとすると、カメラ11の画角が20°であることから、ブロック1〜5までの幅は5.29m(=30m×tan10°)と算出できる。これにより、ブロック1つ当たりの幅は1.058m(=5.29m/5)と算出できる。したがって、有限長L’1の値、水平方向に配列されたブロック数、ブロック1つ当たりの幅を予めパラメータとして持っておけば、各ブロックの画角を求めることができる。
例えば、2列目のブロックの画角θ2は以下のように求められる。
θ2=Arctan(L2/L1)−Arctan(L3/L1)
=Arctan(4.232/30)−Arctan(3.17/30)
=0.140−0.105[rad]
=2[deg]
【0051】
図6は、雲領域直線の算出方法を説明するための概念図(その2)である。図6に示すように、雲領域直線算出部22は、車両位置検出部12によって検出される現在の車両位置(x2,y2)と、その直前(所定期間だけ過去)の車両位置(x1,y1)の各座標に基づいて、自車両のマップ上における進行方向(傾き)を求める。具体的には、雲領域直線算出部22は、マップ(地表面)のxy座標におけるy軸からの傾き角θを自車両の進行方向として求める。この傾き角θは、Arctan((y1−y2)/(x1−x2))を計算することで得られる。
【0052】
図7は、雲領域直線の算出方法を説明するための概念図(その3)である。図7に示すように、雲領域直線算出部22は、上記したマップ上における自車両の傾き角θに対して、雲画像存在領域である各ブロック401の画角を合成し、さらにこれをxy座標上における傾き(一次式y=ax+bにおける傾きa)に変換する。上記の例では4列目と5列目の各ブロック401の画角をそれぞれθ4、θ5とすれば、xy画像上における傾きaはtan(θ+θ5+θ4)と表される。また、切片bについては、自車両の現在の車両位置(x2,y2)と傾きaから求めることができる。このようにして、自車両の現在の車両位置と、雲画像存在領域である2つのブロック401の全体における一端および他端のそれぞれを結ぶ仮想的な直線である2つの雲領域直線が算出される。図8は、雲領域直線算出部によって算出される雲領域直線の一例を示す図である。図示のように、自車両の現在位置から延びる2つの雲領域直線1、2が求められる。
【0053】
次に、ワイパー動作検出部23は、例えば自車両から得られるワイパー信号を用いて、ワイパーの動作状態を検出する(ステップS14)。ワイパー動作検出部23は、ワイパーが動作中である場合にはその旨を示すワイパー動作情報を生成する。このワイパー動作情報は、天候情報処理サーバ2側において、その車両の存在する場所で降雨していることを示す情報(降雨情報)として活用することができる。なお、フロントガラス洗浄等の一時的なワイパー動作などの降雨とは無関係なワイパー動作を排除するために、ワイパー動作検出部23は、一定時間に亘り継続的にワイパーが動作中である場合にワイパー動作情報を生成するようにしてもよい。
【0054】
次に、天候情報処理部24は、雲領域直線算出部23によって算出された雲領域直線およびワイパー動作検出部23によって生成されたワイパー動作情報の各データを天候情報データとして、通信部16を介して天候情報処理サーバ2へ送信する(ステップS15)。なお、雲領域直線については、傾きaと切片bの各データのみ送信することで足りる。また、本実施形態では、自車両の現在の車両位置(x2,y2)のデータおよび自車両の進行方向を示す傾き角θのデータも天候情報データに付加して送信される。なお、ワイパーが動作中ではなくワイパー動作情報が生成されていない場合には、ワイパー動作情報は送信されない。天候情報処理部24によって送信された天候情報データはネットワーク3を介して天候情報処理サーバ2で受信される。
【0055】
以上のようにして各車両から天候情報処理サーバ2へ天候情報データが送信される。次に、天候情報処理サーバ2が車両用情報処理装置1から送信された雲の位置等に関するデータを用いて雨天警戒領域データを求め、それを各車両の車両用情報処理装置1へ送信する際の動作手順を説明する。図9は、天候情報処理サーバの動作手順を示すフローチャートである。
【0056】
各車両の車両用情報処理装置1から天候情報データが送信されると、天候情報収集部61は通信部52を介してこれらの天候情報データを取得し、情報格納部53へ格納する(ステップS21)。例えば、これらの天候情報データはその取得時期に応じた時系列データ(典型的には時刻データ)と紐付けして情報格納部53へ格納される。
【0057】
次に、対象車両設定部63は、天候情報データに付加されている各車両の現在の車両位置のデータおよび進行方向の傾き角θのデータを用いて、雲領域座標を算出する際に組み合わせる対象とすべき車両を設定する(ステップS22)。
【0058】
図10は、対象車両を設定する方法(マッチング方法)を説明するための図である。各車両の進行方向の傾きは、傾き角θを用いてtanθを算出することで求められる。対象車両設定部63は、ある1つの車両を任意に決めて、この車両から所定距離Lを半径とする円内に存在し、かつ進行方向が互いに半径Lの円内で交わる別の車両を対象車両として設定する。例えば、図示の車両100Aを基準とすると、この車両100Aから半径Lの円内に存在し、かつ進行方向が交わる車両100Cは対象車両として設定されるが、進行方向が交わらない車両100Bは対象車両として設定されない。また、図示の車両100Bを基準とすると、この車両100Bから半径Lの円内に存在し、かつ進行方向が交わる車両100Cが対象車両として設定されるが、進行方向が交わらない車両100Aは対象車両として設定されない。なお、各車両の相互間距離が一定の基準値よりも小さい場合、すなわち車両間が近接している場合には、それらの車両同士を上記したマッチングの対象から除外することも好ましい。これは、近接した車両同士をマッチングさせると、雲領域座標の検出精度が低下する場合があるからである。
【0059】
次に、雲領域座標算出部62は、情報格納部53に格納された各天候情報データに含まれる雲領域直線データ(傾きaおよび切片bの各データ)に基づいて、マップ上において雲が存在すると推測される領域を特定する雲領域座標を算出する(ステップS23)。ここでは、ステップS22において対象車両として設定された2以上の車両の雲領域直線データを用いて雲領域座標が算出される。それにより、雲領域座標の算出精度が高まる。
【0060】
図11は、雲領域座標を算出する処理の内容を説明するための図である。車両100Aの車両用情報処理装置1から送信された雲領域直線が図示のようにy=ab1x+bb1(式1)、y=ab2x+bb2(式2)、とそれぞれ表され、車両100Cの車両用情報処理装置1から送信された雲領域直線が図示のようにy=ar1x+br1(式3)、y=ar2x+br2(式4)、とそれぞれ表されるものとする。この場合、各式1〜4を用いることにより、これらの各交点P1、P2、P3、P4を求めることができる。具体的には、式1と式4に基づき交点P1が求まり、式1と式3に基づき交点P2が求まり、式2と式3に基づき交点P3が求まり、式2と式4に基づき交点P4が求まる。このようにして求められた各交点P1〜P4によって画定される領域が雲領域であり、各交点P1〜P4の座標が雲領域座標となる。
【0061】
次に、天候情報配信部64は、ワイパー動作情報および各車両の車両位置の各データに基づいて、雲領域座標算出部62によって算出された雲領域座標により特定される雲領域内に存在する車両がワイパーを動作させているか否かを判定する(ステップS23)。
【0062】
雲領域内の車両がワイパーを動作させている場合(ステップS24;YES)、天候情報配信部64は、上記した雲領域座標のデータに降雨情報データを付加する(ステップS24)。また、雲領域内の車両がワイパーを動作させていない場合(ステップS23;NO)、天候情報配信部64は、降雨情報データを付加しない。
【0063】
次に、天候情報配信部64は、通信部52を介して、雲領域座標データを雨天警戒情報データとして各車両の車両用情報処理装置1へ配信する(ステップS25)。配信された雨天警戒情報データはネットワーク3を介して各車両の車両用情報処理装置1で受信される。
【0064】
以上のようにして各車両へ雨天警戒情報データが配信される。次に、車両用情報処理装置1が雨天警戒情報データに基づいて雨天警戒警報を車両の搭乗者に通知する際の動作手順を説明する。図12は、車両用情報処理装置の動作手順を示すフローチャートである。
【0065】
天候情報処理サーバ2から雨天警戒情報データが送信されると、天候情報処理部24は通信部16を介してこの雨天警戒情報データを受信する(ステップS31)。
【0066】
次に、天候情報処理部24は、車両位置検出部12によって検出される自車両の位置(現在および過去)に基づいて、自車両の現在位置と進行方向を検出する(ステップS32)。なお、自車両の現在位置と進行方向は雲領域直線を算出する際にも求められているので、そのデータを利用してもよい。
【0067】
次に、天候情報処理部24は、自車両の現在の車両位置が雲領域座標によって特定される雨天警戒領域内であるか、またはこの雨天警戒領域に進入中、すなわち近い未来に進入すると予測される状態であるかを判定する(ステップS33)。
【0068】
自車両の現在の車両位置が雨天警戒領域内であり、またはそこへ進入中である場合には(ステップS33;YES)、天候情報処理部24は、表示部14およびスピーカ15にそれぞれ制御信号を与えることにより、雨天警報を示す画像を表示させ、音声を出力させる(ステップS34)。
【0069】
また、天候情報処理部24は、天候情報データに降雨情報が含まれるか否かを判定する(ステップS35)。降雨情報が含まれる場合には(ステップS35;YES)、雨天警戒領域内が実際に降雨状態であると予測されるので、天候情報処理部24は、表示部14およびスピーカ15にそれぞれ制御信号を与えることにより、降雨中であることを示す画像を表示させ、音声を出力させる(ステップS36)。
【0070】
なお、自車両の現在の車両位置が雨天警戒領域内ではなく、進入中でもない場合には(ステップS33;NO)、天候情報処理部24は、上記したステップS34〜ステップS36の処理を実行しない。また、天候情報データに降雨情報が含まれない場合には(ステップS35;NO)、天候情報処理部24は、上記したステップS36の処理を実行しない。
【0071】
以上のような本実施形態によれば、車両の進行方向の風景画像を用いた画像認識処理により実際の雲が存在すると推測される領域を求めているため、車両に備わったセンサーを用いる場合のような不都合が生じない。また、複数の車両からの情報を用いてサーバ側で実際に雲が存在すると推測される場所をスポットではなく一定の広さを有する領域として求めているので、車両が存在しないことによる情報の空白化を回避しやすく、また車両が少ないことによる1つの車両からの情報への依存度を下げることができ、ピンポイント的に発生する降雨にも対応可能となる。したがって、各車両へ配信すべき雨天警戒情報の検出精度を向上することが可能となる。
【0072】
なお、本発明は上述した実施形態の内容に限定されるものではなく、本発明の要旨の範囲内において種々に変形して実施をすることが可能である。例えば、上記した実施形態における車両用情報処理装置は、その構成の一部または全部が車両用のナビゲーション装置に組み込まれていてもよい。また、上記した実施形態では移動体の具体例として車両を挙げていたがこれに限定されず、例えば鉄道、船舶、航空機等の移動体に情報処理装置が搭載されていてもよい。
【0073】
また、上記した実施形態では、各車両用情報処理装置1に対して雨天警戒領域のデータが送信され、各々の車両用情報処理装置1にて警報の要否を判断していたが、天候情報処理サーバ2側で警報の必要な車両を特定し、当該車両の車両用情報処理装置1へ選択的に雨天警戒領域のデータを送信し、または警報の要否を示すデータを送信してもよい。この場合には、各車両用情報処理装置1から送信された車両の進行方向および現在位置の各データに基づいて、各車両の現在位置が雲領域座標によって特定される雨天警戒領域内であるか、またはこの雨天警戒領域に進入中であるかを天候情報処理サーバ2の天候情報配信部64が判定し、必要な車両の車両用情報処理装置1に対して雨天警戒領域のデータまたは警報の要否を示すデータを送信すればよい。
【符号の説明】
【0074】
1:車両用情報処理装置
2:天候情報処理サーバ
3:ネットワーク
11:カメラ
12:車両位置検出部(GPS)
13:制御部
14:表示部
15:スピーカ(音声出力手段)
16:通信部
21:雲画像検出部
22:雲領域直線算出部
23:ワイパー動作検出部
24:天候情報処理部
51:サーバ制御部
52:通信部
53:情報格納部
61:天候情報収集部
62:雲領域座標算出部
63:対象車両設定部
64:天候情報配信部
100A、100B、100C、100D:車両
200:サーバ
300:雨天警戒領域
【特許請求の範囲】
【請求項1】
複数の移動体の各々に搭載される複数の情報処理装置と、当該情報処置装置の各々と通信可能に接続される天候情報処理サーバとを含む天候情報処理システムであって、
前記複数の情報処理装置の各々は、
前記移動体の進行方向の風景画像を撮影するカメラと、
前記移動体の位置を検出する位置検出部と、
前記風景画像に対して画像認識処理を行うことにより雲画像存在領域を検出する雲画像検出部と、
前記雲画像存在領域と前記移動体の位置に基づいて、前記移動体の位置を基準として実際の雲が存在すると推測される領域を特定する雲領域直線を算出する雲領域直線算出部と、
前記雲領域直線と前記移動体の位置の各データを前記天候情報処理サーバへ送信する天候情報送信部、
を含み、
前記天候情報処理サーバは、
前記複数の情報処理装置の各々から送信される前記雲領域直線及び前記移動体の位置の各データを受信するサーバ側通信部と、
前記雲領域直線及び前記移動体の位置の各データに基づいて、前記実際の雲が存在すると推測される領域の座標である雲領域座標を算出する雲領域座標算出部と、
前記雲領域座標を含んだ雨天警戒情報のデータを生成し、前記サーバ側通信部を介して当該雨天警戒情報のデータを前記複数の情報処理装置の各々へ送信する雨天警戒情報配信部、
を含む、天候情報処理システム。
【請求項2】
前記雲画像検出部は、前記風景画像をマトリクス状に配列される複数のブロックに分割して当該複数のブロックの各々の前記雲画像の有無を判定することにより前記雲画像存在領域を検出する、請求項1に記載の天候情報処理システム。
【請求項3】
前記雲領域直線算出部は、前記複数のブロックに分割して検出される前記雲画像存在領域に基づき、前記カメラの画角を用いて前記雲領域直線の傾きを算出する、請求項2に記載の天候情報処理システム。
【請求項4】
前記雲領域座標算出部は、複数の前記雲領域直線が相互に交わる点を前記雲領域座標として算出する、請求項1〜3の何れか1項に記載の天候情報処理システム。
【請求項5】
移動体に搭載され、かつ天候情報処理サーバと通信可能に接続される情報処理装置であって、
前記移動体の進行方向の風景画像を撮影するカメラと、
前記移動体の位置を検出する位置検出部と、
前記風景画像に対して画像認識処理を行うことにより雲画像存在領域を検出する雲画像検出部と、
前記雲画像存在領域と前記移動体の位置に基づいて、前記移動体の位置を基準として実際の雲が存在すると推測される領域を特定する雲領域直線を算出する雲領域直線算出部と、
前記雲領域直線と前記移動体の位置の各データを前記天候情報処理サーバへ送信する天候情報送信部、
を含む、情報処理装置。
【請求項6】
複数の移動体の各々に搭載された複数の情報処理装置と通信可能に接続される天候情報処理サーバであって、
前記複数の情報処理装置の各々から送信される、前記移動体の位置を基準として実際の雲が存在すると推測される領域を特定する雲領域直線と前記移動体の位置の各データを受信するサーバ側通信部と、
前記雲領域直線及び前記移動体の位置の各データに基づいて、前記実際の雲が存在すると推測される領域の座標である雲領域座標を算出する雲領域座標算出部と、
前記雲領域座標を含んだ雨天警戒情報のデータを生成し、前記サーバ側通信部を介して当該雨天警戒情報のデータを前記複数の情報処理装置の各々へ送信する雨天警戒情報配信部、
を含む、天候情報処理サーバ。
【請求項1】
複数の移動体の各々に搭載される複数の情報処理装置と、当該情報処置装置の各々と通信可能に接続される天候情報処理サーバとを含む天候情報処理システムであって、
前記複数の情報処理装置の各々は、
前記移動体の進行方向の風景画像を撮影するカメラと、
前記移動体の位置を検出する位置検出部と、
前記風景画像に対して画像認識処理を行うことにより雲画像存在領域を検出する雲画像検出部と、
前記雲画像存在領域と前記移動体の位置に基づいて、前記移動体の位置を基準として実際の雲が存在すると推測される領域を特定する雲領域直線を算出する雲領域直線算出部と、
前記雲領域直線と前記移動体の位置の各データを前記天候情報処理サーバへ送信する天候情報送信部、
を含み、
前記天候情報処理サーバは、
前記複数の情報処理装置の各々から送信される前記雲領域直線及び前記移動体の位置の各データを受信するサーバ側通信部と、
前記雲領域直線及び前記移動体の位置の各データに基づいて、前記実際の雲が存在すると推測される領域の座標である雲領域座標を算出する雲領域座標算出部と、
前記雲領域座標を含んだ雨天警戒情報のデータを生成し、前記サーバ側通信部を介して当該雨天警戒情報のデータを前記複数の情報処理装置の各々へ送信する雨天警戒情報配信部、
を含む、天候情報処理システム。
【請求項2】
前記雲画像検出部は、前記風景画像をマトリクス状に配列される複数のブロックに分割して当該複数のブロックの各々の前記雲画像の有無を判定することにより前記雲画像存在領域を検出する、請求項1に記載の天候情報処理システム。
【請求項3】
前記雲領域直線算出部は、前記複数のブロックに分割して検出される前記雲画像存在領域に基づき、前記カメラの画角を用いて前記雲領域直線の傾きを算出する、請求項2に記載の天候情報処理システム。
【請求項4】
前記雲領域座標算出部は、複数の前記雲領域直線が相互に交わる点を前記雲領域座標として算出する、請求項1〜3の何れか1項に記載の天候情報処理システム。
【請求項5】
移動体に搭載され、かつ天候情報処理サーバと通信可能に接続される情報処理装置であって、
前記移動体の進行方向の風景画像を撮影するカメラと、
前記移動体の位置を検出する位置検出部と、
前記風景画像に対して画像認識処理を行うことにより雲画像存在領域を検出する雲画像検出部と、
前記雲画像存在領域と前記移動体の位置に基づいて、前記移動体の位置を基準として実際の雲が存在すると推測される領域を特定する雲領域直線を算出する雲領域直線算出部と、
前記雲領域直線と前記移動体の位置の各データを前記天候情報処理サーバへ送信する天候情報送信部、
を含む、情報処理装置。
【請求項6】
複数の移動体の各々に搭載された複数の情報処理装置と通信可能に接続される天候情報処理サーバであって、
前記複数の情報処理装置の各々から送信される、前記移動体の位置を基準として実際の雲が存在すると推測される領域を特定する雲領域直線と前記移動体の位置の各データを受信するサーバ側通信部と、
前記雲領域直線及び前記移動体の位置の各データに基づいて、前記実際の雲が存在すると推測される領域の座標である雲領域座標を算出する雲領域座標算出部と、
前記雲領域座標を含んだ雨天警戒情報のデータを生成し、前記サーバ側通信部を介して当該雨天警戒情報のデータを前記複数の情報処理装置の各々へ送信する雨天警戒情報配信部、
を含む、天候情報処理サーバ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−108830(P2013−108830A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−253634(P2011−253634)
【出願日】平成23年11月21日(2011.11.21)
【出願人】(000002303)スタンレー電気株式会社 (2,684)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月21日(2011.11.21)
【出願人】(000002303)スタンレー電気株式会社 (2,684)
[ Back to top ]