
天板支持機構懸下装置、X線コンピュータ断層撮影装置、およびたわみ量低減方法
【課題】撮影領域における天板のたわみを低減させ、天板支持機構直下に足場を形成すること。
【解決手段】本実施形態に係る天板支持機構懸下装置は、天板を移動可能に支持する天板支持機構と、前記天板支持機構を天井から懸下する長さが可変な複数の懸下部材と、前記複数の懸架部材各々の長さを変更する複数の懸下部材駆動部と、前記天板支持機構により移動された前記天板に関するたわみ量を計測する計測部と、前記たわみ量に応じて前記複数の懸下部材の長さを個々に制御する駆動制御部と、を具備することを特徴とする。
【解決手段】本実施形態に係る天板支持機構懸下装置は、天板を移動可能に支持する天板支持機構と、前記天板支持機構を天井から懸下する長さが可変な複数の懸下部材と、前記複数の懸架部材各々の長さを変更する複数の懸下部材駆動部と、前記天板支持機構により移動された前記天板に関するたわみ量を計測する計測部と、前記たわみ量に応じて前記複数の懸下部材の長さを個々に制御する駆動制御部と、を具備することを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、天板支持機構を懸下する天板支持機構懸下装置に関する。
【背景技術】
【0002】
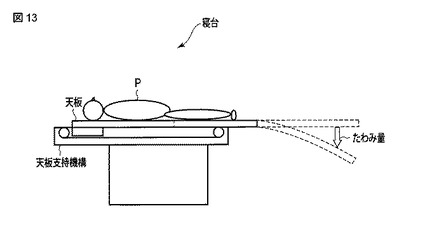
従来、X線コンピュータ断層撮影装置などの医用画像診断装置に装備される寝台は、被検体を載置する天板を片側で支える構造を採用している。被検体が載置された天板は、撮影可能位置へ水平移動により移動される。このとき、図13に示すように、天板それ自体の重み及び被検体の体重により天板が下方に変形する“たわみ”が発生する。このたわみにより、例えば、X線管等の回転軸(z軸)に沿って撮影位置を変えながらボリュームスキャンを繰り返すとき、このz軸に長く合成した全体画像において、このボリュームスキャン切り替え位置に段差が発生する問題がある。
【0003】
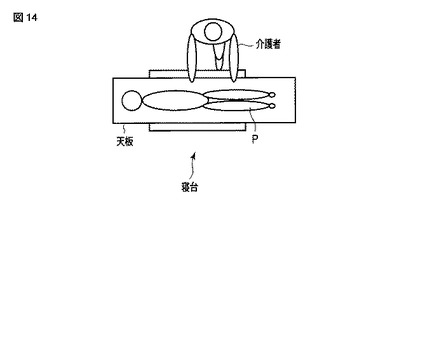
また、天板支持機構の直下に足場の設置が望まれている。ここで、足場とは、例えば、ストレッチャーに載置された被検体の天板への移動にあたって、被検体を天板に移動させる介護者の足を置く場所である。足場の設置にあたって、床に対する寝台の設置面積は、できるだけ狭くされる。また、介護者が天板スライド機構の直下を踏んでも大丈夫な構造が、採用されている。しかしながら、図14に示すように、天板支持機構の直下のスペースには、床から天板までの高さ(以下寝台の高さと呼ぶ)を可変させる機構などが内蔵されるため、上記要望を満たすための上記構造は根本的な改善ではなく、天板支持機構の直下のスペースを開放的に利用できない問題がある。
【発明の概要】
【発明が解決しようとする課題】
【0004】
目的は、撮影領域における天板のたわみを低減させ、天板支持機構直下に足場を形成することにある。
【課題を解決するための手段】
【0005】
本実施形態に係る天板支持機構懸下装置は、天板を移動可能に支持する天板支持機構と、前記天板支持機構を天井から懸下する長さが可変な複数の懸下部材と、前記複数の懸架部材各々の長さを変更する複数の懸下部材駆動部と、前記天板支持機構により移動された前記天板に関するたわみ量を計測する計測部と、前記たわみ量に応じて前記複数の懸下部材の長さを個々に制御する駆動制御部と、を具備することを特徴とする。
【図面の簡単な説明】
【0006】
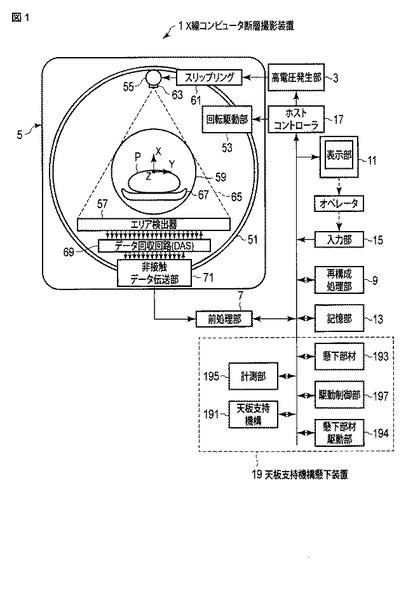
【図1】図1は、第1の実施形態に係るX線コンピュータ断層撮影装置の構成を示す図である。
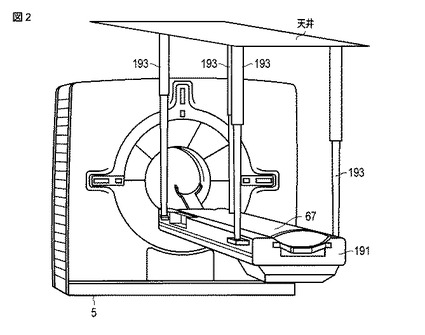
【図2】図2は、第1の実施形態に係るガントリと、天板支持機構と、懸下部材との斜視図である。
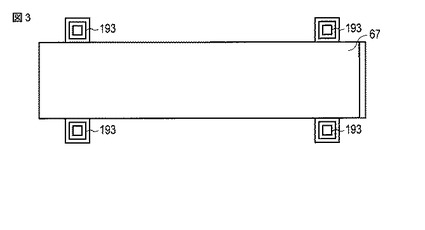
【図3】図3は、第1の実施形態に係る天板支持機構を、天井からみた上面の一例を示す上面図である。
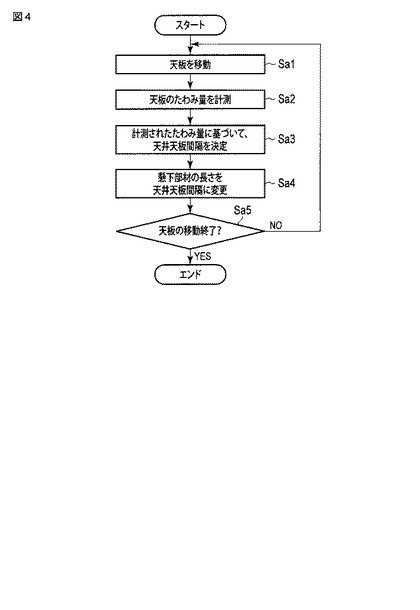
【図4】図4は、第1の実施形態に係り、天板のたわみ量に応じて懸下部材の長さを変更するために懸下部材駆動部を制御する処理の流れの一例を示す流れ図である。
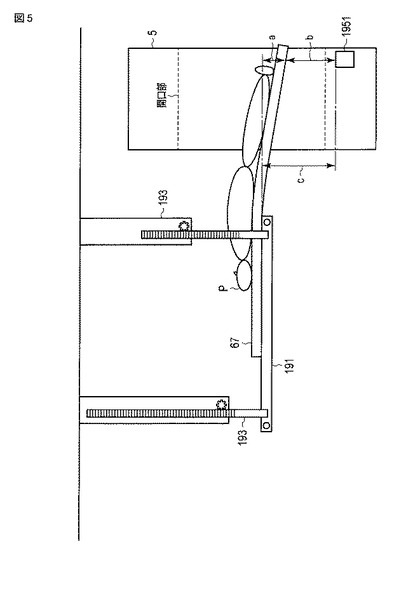
【図5】図5は、第1の実施形態に係り、撮影領域に移動された天板と、天板支持機構と、懸下部材との側面の一例を示す側面図である。
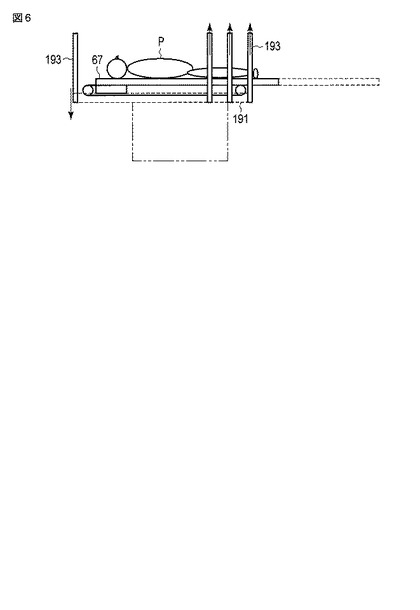
【図6】図6は、第1の実施形態に係る天板支持機構と懸下部材との側面を示す側面図である。
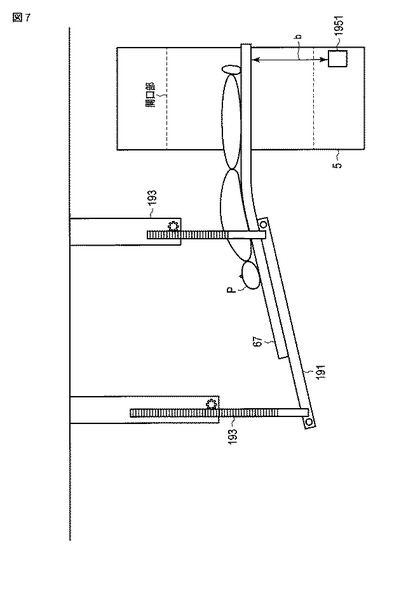
【図7】図7は、第1の実施形態に係り、たわみ量を低減させるために懸下部材駆動部を制御した後における天板支持機構お懸下部材との側面を示す側面図である。
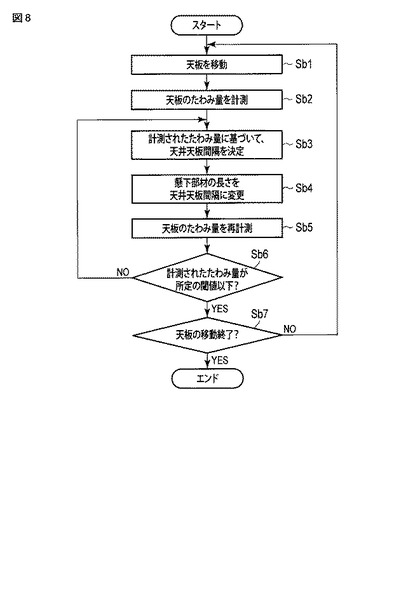
【図8】図8は、第1の実施形態の変形例に係り、天板のたわみ量を所定の閾値以下にするために、懸下部材駆動部を制御する処理の流れの一例を示す流れ図である。
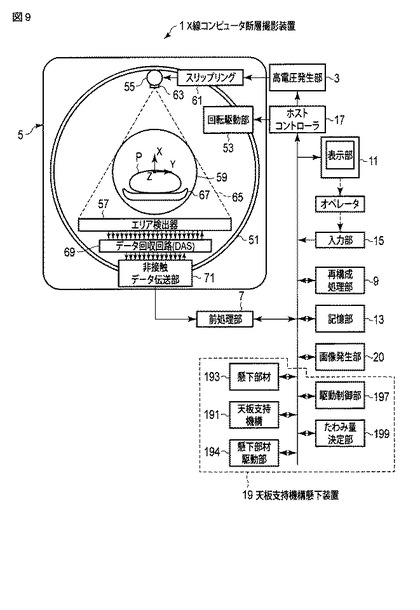
【図9】図9は、第2の実施形態に係り、X線コンピュータ断層撮影装置の構成を示す図である。
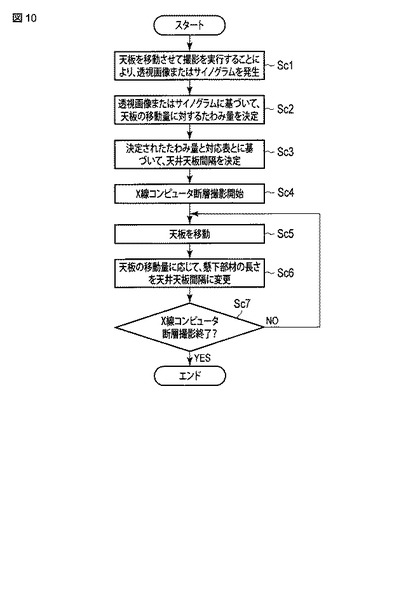
【図10】図10は、第2の実施形態に係り、天板のたわみ量に応じて懸下部材の長さを変更するために懸下部材駆動部を制御する処理の流れの一例を示す流れ図である。
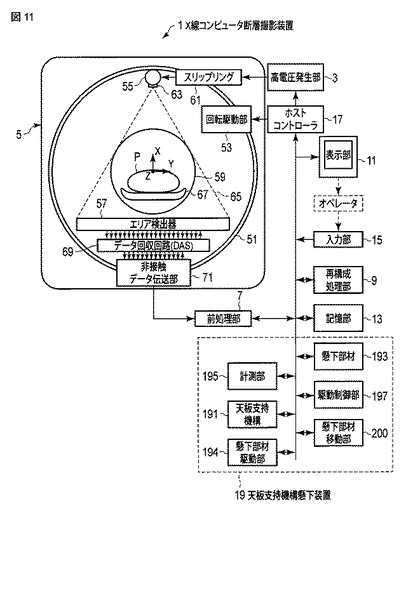
【図11】図11は、第3の実施形態に係り、X線コンピュータ断層撮影装置の構成を示す図である。
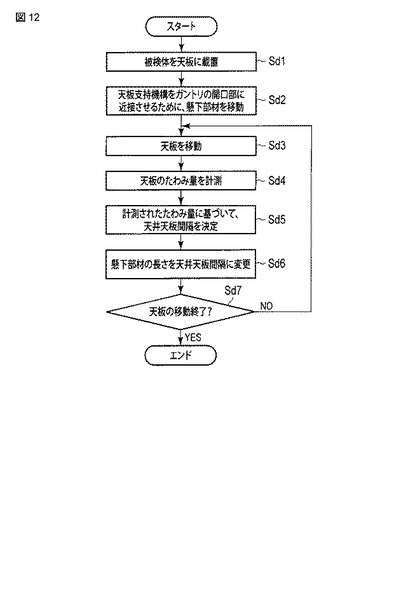
【図12】図12は、第3の実施形態に係り、天板のたわみ量に応じて懸下部材の長さを変更するために懸下部材駆動部を制御する処理の流れの一例を示す流れ図である。
【図13】図13は、従来の寝台に係り、天板支持機構の側面を天板の側面ととともに示す側面図である。
【図14】図14は、従来の寝台に係り、天板の上面を示す上面図である。
【発明を実施するための形態】
【0007】
以下、X線コンピュータ断層撮影装置(Computed Tomography)の実施形態について図面を参照しながら説明する。なお、X線コンピュータ断層撮影装置には、X線管とX線検出器とが一体として被検体の周囲を回転するRotate/Rotate−Type、リング状にアレイされた多数のX線検出素子が固定され、X線管のみが被検体の周囲を回転するStationary/Rotate−Type等様々なタイプがあり、いずれのタイプでも本実施形態へ適用可能である。また、画像を再構成するには被検体の周囲一周、360°分の投影データが、またハーフスキャン法でも180°+ファン角度分の投影データが必要とされる。いずれの再構成方式に対しても本実施形態へ適用可能である。また、入射X線を電荷に変化するメカニズムは、シンチレータ等の蛍光体でX線を光に変換し更にその光をフォトダイオード等の光電変換素子で電荷に変換する間接変換形と、X線によるセレン等の半導体内での電子正孔対の生成及びその電極への移動すなわち光導電現象を利用した直接変換形とが主流である。X線検出素子としては、それらのいずれの方式を採用してもよい。さらに、近年では、X線管とX線検出器との複数のペアを回転リングに搭載したいわゆる多管球型のX線コンピュータ断層撮影装置の製品化が進み、その周辺技術の開発が進んでいる。本実施形態においては、従来からの一管球型のX線コンピュータ断層撮影装置であっても、多管球型のX線コンピュータ断層撮影装置であってもいずれも適用可能である。ここでは、一管球型として説明する。
【0008】
なお、以下の説明において、略同一の機能及び構成を有する構成要素については、同一符号を付し、重複説明は必要な場合にのみ行う。
【0009】
(第1の実施形態)
図1は、第1の実施形態に係るX線コンピュータ断層撮影装置1の構成を示す図である。
第1の実施形態に係るX線コンピュータ断層撮影装置1は、高電圧発生部3、ガントリ5、前処理部7、再構成処理部9、表示部11、記憶部13、入力部15、ホストコントローラ17、天板支持機構懸下装置19を有する。
【0010】
高電圧発生部3は、X線管55に供給するための高電圧を発生する。図1において、高電圧発生部3は、ガントリ5の外部に設けられている。なお、高電圧発生部3は、後述する回転フレーム51に搭載されてもよい。以下、説明の便宜上、高電圧発生部3は、ガントリ5の外部に設けられているものとする。
【0011】
ガントリ5には、回転支持機構が収容される。回転支持機構は、回転フレーム51と、回転軸Zを中心として回転自在に回転フレーム51を支持するフレーム支持機構と回転フレーム51の回転を駆動する回転駆動部53とを有する。回転フレーム51には、X線管55と、2次元アレイ型または多列型とも称されるエリア検出器57とが搭載される。エリア検出器57は、撮影領域59を挟んでX線管55に対向する。X線管55は、スリップリング61を介して、高電圧発生部3に電気的に接続される。回転駆動部53は、後述するホストコントローラ17による制御の下で、ダイレクトドライブまたはベルトドライブにより、回転フレーム51を回転させる。
【0012】
X線管55は、スリップリング61を介して高電圧発生部3から電圧の印加および電流の供給を受けて、X線の焦点からX線を放射する。X線の焦点から放射されたX線は、X線管55のX線放射窓に取り付けられたコリメーターユニット63により、例えばコーンビーム形(角錐形)に整形される。X線の放射範囲は、点線65で示されている。X軸は、回転軸Zと直交し、放射されるX線の焦点を通る直線である。Y軸は、X軸および回転軸Zと直交する直線である。なお、説明の便宜上このXYZ座標系は、回転軸Zを中心として回転する回転座標系として説明する。
【0013】
エリア検出器57は、回転軸Zを挟んでX線管55に対峙する位置およびアングルで取り付けられる。エリア検出器57は、複数のX線検出素子を有する。ここでは、単一のX線検出素子が単一のチャンネルを構成しているものとして説明する。複数のチャンネルは、回転軸Zに直交し、かつ放射されるX線の焦点を中心として、この中心から1チャンネル分のX線検出素子の受光部中心までの距離を半径とする円弧方向(チャンネル方向)とZ方向との2方向に関して2次元状に配列される。また、エリア検出器57は、複数のX線検出素子を1列に配列した複数のモジュールで構成されてもよい。モジュール各々は、上記チャンネル方向に沿って略円弧方向に1次元状に配列される。
【0014】
また複数のX線検出素子は、チャンネル方向とスライス方向との2方向に関して2次元状に配列させてもよい。すなわち、2次元状の配列は、上記チャンネル方向に沿って一次元状に配列された複数のチャンネルを、スライス方向に関して複数列並べて構成される。このような2次元状のX線検出素子配列を有するエリア検出器57は、略円弧方向に1次元状に配列される複数の上記モジュールをスライス方向に関して複数列並べて構成されてもよい。
【0015】
撮影又はスキャンに際しては、X線管55とエリア検出器57との間の円筒形の撮影領域59内に、被検体Pが天板67に載置され挿入される。エリア検出器57の出力側には、DAS(Data Acquisition System)と呼ばれるデータ収集回路69が接続される。
【0016】
データ収集回路69には、エリア検出器57の各チャンネルの電流信号を電圧に変換するI−V変換器と、この電圧信号をX線の曝射周期に同期して周期的に積分する積分器と、この積分器の出力信号を増幅するアンプと、このアンプの出力信号をディジタル信号変換するアナログ・ディジタル・コンバータとが、チャンネルごとに取り付けられている。データ収集回路69から出力されるデータ(純生データ(pure raw data))は、磁気送受信又は光送受信を用いた非接触データ伝送部71を経由して、前処理部7に伝送される。
【0017】
前処理部7は、データ収集回路69から出力される純生データに対して前処理を施す。前処理には、例えばチャンネル間の感度不均一補正処理、X線強吸収体、主に金属部による極端な信号強度の低下または、信号脱落を補正する処理等が含まれる。前処理部7から出力される再構成処理直前のデータ(生データ(raw data)または、投影データと称される、ここでは投影データという)は、データ収集したときにビューアングルを表すデータと関連付けられて、磁気ディスク、光磁気ディスク、又は半導体メモリを備えた記憶部13に記憶される。
【0018】
なお、投影データとは、被検体を透過したX線の強度に応じたデータ値の集合である。ここでは説明の便宜上、ワンショットで略同時に収集したビューアングルが同一である全チャンネルにわたる一揃いの投影データを、投影データセットと称する。また、ビューアングルは、X線管55が回転軸Zを中心として周回する円軌道の各位置を、回転軸Zから鉛直上向きにおける円軌道の最上部を0°として360°の範囲の角度で表したものである。なお、投影データセットの各チャンネルに対する投影データは、ビューアングル、コーン角、チャンネル番号によって識別される。また、投影データセットの各チャンネルに対する投影データは、X線管55から放出されるX線のエネルギーに応じて、識別されてもよい。
【0019】
再構成処理部9は、ビューアングルが360°又は180°+ファン角度の範囲内の投影データセットに基づいて、フェルドカンプ法またはコーンビーム再構成法により、略円柱形の3次元画像を再構成する機能を有する。ボリュームデータにおけるスライス面に垂直な方向(Z方向)の端の領域には、撮像視野(Field of view)の領域を再構成するための360°分の投影データがそろわない領域が存在する。投影データが不足する領域は、ボリュームデータの信頼性が低い。投影データが不足する領域は、再構成しない又は再構成画像を表示しない。この領域は一般にマスク(MASK)領域と称される。フェルドカンプ法は、コーンビームのように再構成面に対して投影レイが交差する場合の再構成法である。フェルドカンプ法は、コーン角が小さいことを前提として畳み込みの際にはコーンビームをファン投影ビームとみなして再構成処理し、逆投影においてはスキャンの際のレイに沿って再構成処理する近似的画像再構成法である。コーンビーム再構成法は、フェルドカンプ法よりもコーン角のエラーが抑えられる方法として、再構成面に対するレイの角度に応じて投影データを補正する再構成法である。
【0020】
表示部11は、再構成処理部9で再構成された医用画像、X線コンピュータ断層撮影のために設定される条件などを表示する。
【0021】
記憶部13は、再構成処理部9で再構成された医用画像(以下再構成画像と呼ぶ)を記憶する。記憶部13は、後述する入力部15により入力された操作者の指示、画像処理の条件、撮影条件などの情報を記憶する。記憶部13は、前処理部7から出力された投影データを記憶する。記憶部13は、X線コンピュータ断層撮影のために高電圧発生部3、ガントリ5、後述する天板支持機構懸下装置19などを制御する制御プログラムを記憶する。
【0022】
入力部15は、操作者が所望するX線コンピュータ断層撮影の撮影条件、所定の値などを入力する。具体的には、入力部15は、操作者からの各種指示・命令・情報・選択・設定を本X線コンピュータ断層撮影装置1に取り込む。入力部15は、図示しないが、関心領域の設定などを行うためのトラックボール、スイッチボタン、マウス、キーボード等を有する。入力部15は、表示画面上に表示されるカーソルの座標を検出し、検出した座標をホストコントローラ17に出力する。なお、入力部15は、表示画面を覆うように設けられたタッチパネルでもよい。この場合、入力部15は、電磁誘導式、電磁歪式、感圧式等の座標読み取り原理でタッチ指示された座標を検出し、検出した座標をホストコントローラ17に出力する。
【0023】
ホストコントローラ17は、本X線コンピュータ断層撮影装置1の中枢として機能する。ホストコントローラ17は、図示しないCPUを備える。ホストコントローラ17は、記憶部13に記憶された制御プログラムに基づいて、X線コンピュータ断層撮影のために高電圧発生部3、ガントリ5、天板支持機構懸下装置19などを制御する。ホストコントローラ17は、所定の画像発生・表示等を実行するための制御プログラムを、記憶部13から読み出して自身が有するメモリ上に展開し、各種処理に関する演算・処理等を実行する。
【0024】
天板支持機構懸下装置19は、天板支持機構191、懸下部材193、懸下部材駆動部194、計測部195、駆動制御部197を有する。図2は、天板支持機構191と、懸下部材193と、ガントリ5との斜視図である。図3は、天板支持機構191を天井から見た上面図である。
【0025】
天板支持機構191は、図示していない天板駆動部による駆動により、被検体Pが載置された天板67を、ガントリ5の撮影領域59内へ移動させる。
【0026】
懸下部材193は、天板支持機構191を天井から懸下する。複数の懸架部材193各々は、天板支持機構191を天井から懸下する長さが可変な機能(以下、長さ可変機能と呼ぶ)を有する。懸下部材193は、例えば、ギアとラックとで構成される。なお、懸下部材193は、ワイヤのように天板支持機構191を天井から吊り下げる部材であってもよい。また、懸下部材193は、インナーチューブとアウターチューブとを組み合わせて液体を封入した部材であってもよい。なお、懸下部材193と天板支持機構との間には、任意の方向に回転可能な図示していない取付部を有していてもよい。
【0027】
懸下部材駆動部194は、後述する駆動制御部197からの指示に従って、複数の懸下部材193各々の長さを変更する。具体的には、複数の懸下部材駆動部194は、複数の懸下部材193にそれぞれ対応して設けられる。例えば、懸下部材193がギアとラックとで構成される場合、懸下部材駆動部194は、このギアを駆動させるモータである。また、懸下部材193がワイヤで構成される場合、懸下部材駆動部194は、このワイヤを巻いたり緩めたりするモータである。また、懸下部材193がインナーチューブとアウターチューブとを組み合わせて液体を封入した部材である場合、懸下部材駆動部194は、懸下部材193の長さを変更するために、この封入された液体の圧力を調整する圧力調整器であってもよい。なお、懸下部材駆動部194は、緊急時等において、被検体Pの足元近傍を床に近づけるために、懸下部材193の長さを変更することも可能である。
【0028】
計測部195は、天板支持機構191により移動された天板67のたわみ量(以下、たわみ量と呼ぶ)を計測する。例えば、計測部195は、所定の位置から天板67に向けて電磁波を照射し、反射波が戻ってくるまでの時間を計測することにより、たわみ量を計測する。所定の位置とは、例えば、ガントリ5内の天板直下である。具体的には、計測部195は、例えば、電磁波送受信部を有する。電磁波送受信部は、例えば、撮影領域59に挿入される天板67の下方におけるガントリ5内に設置される。撮影領域59に天板67が挿入されると、電磁波送受信部は、天板に向けて電磁波を照射する。電磁波送受信部は、天板で反射された反射電磁波を受信する。計測部195は、電磁波の送受信における時間間隔に電磁波の速度をかけることにより、電磁波送受信部から天板までの距離を計算する。計測部195は、電磁波送受信部とスライドされる前の天板67の水平位置との距離(以下、基準距離と呼ぶ)から、計算された距離を差分することにより、天板67のたわみ量を得る。基準距離は、例えば、計測部195における図示していないメモリなどに予め記憶される。なお、電磁波送受信部は、例えばレーザー送受信部であってもよい。
【0029】
駆動制御部197は、計測部195で計測されたたわみ量に応じて、複数の懸下部材193の長さを個々に制御する。具体的には、駆動制御部197は、計測部195で計測されたたわみ量を低減させるために、たわみ量に応じて、複数の懸下部材駆動部194を個々に制御する。例えば、駆動制御部197は、たわみ量に対する天井と天板支持機構191との間隔(以下、天井天板間隔と呼ぶ)の対応表と、計測されたたわみ量とに基づいて、天井天板間隔を決定する。上記対応表は、駆動制御部197における図示していないメモリなどに予め記憶される。駆動制御部197は、複数の支持部材各々の長さを決定された天井天板間隔に変更するために、懸下部材駆動部194を制御する。
【0030】
(たわみ量低減機能)
たわみ量低減機能とは、計測されたたわみ量に基づいて決定された天井天板間隔に懸下部材193の長さを変更するために懸下部材駆動部194を制御することにより、たわみ量を低減させる機能である。以下、たわみ量低減機能に関する処理(以下、たわみ量低減処理と呼ぶ)について説明する。
【0031】
図4は、天板67のたわみ量に応じて懸下部材193の長さを変更するために懸下部材駆動部194を制御する処理の流れの一例を示す流れ図である。
【0032】
天板支持機構191を駆動させることにより、天板67がガントリ5における撮影領域59に移動される(ステップSa1)。図5は、撮影領域59に移動された天板67と、天板支持機構191と、懸下部材193との側面の一例を示す側面図である。図5に示すように、被検体Pを載置した天板67が撮影領域59に移動されると、天板67にたわみが発生する。たわみ量が、計測部195により計測される(ステップSa2)。計測されるたわみ量は、例えば、図5における点線の両端矢印aで示されている。図5における実線の両端矢印bは、電磁波送受信部1951から放射された電磁波と、天板67から反射された反射波との軌跡である。図5における実線の両端矢印cは、基準距離を示す。
【0033】
天井天板間隔が、計測されたたわみ量と対応表とに基づいて、決定される(ステップSa3)。懸下部材駆動部194により、懸下部材193の長さが、決定された天井天板間隔に変更される(ステップSa4)。図6は、第1の実施形態に係る天板支持機構191と懸下部材193との側面を示す側面図である。図6における矢印は、決定された天井天板間隔に懸下部材193の長さを変更するために、懸下部材193が伸縮される方向を示している。図7は、たわみ量を低減させるために懸下部材駆動部194を制御した後における天板支持機構191と懸下部材193との側面を示す側面図である。ステップSa4における処理により、たわみ量が低減される。
【0034】
天板67のスライドが終了するまで、ステップSa1乃至ステップSa4における処理が繰り返される(ステップSa5)。上記繰り返しにより、例えば、非ヘリカルなX線コンピュータ断層撮影において、ボリュームスキャンごとに天板67のたわみ量が低減される。
【0035】
(変形例)
第1の実施形態との相違は、懸下部材193の長さの変更後にたわみ量を再度計測し、再度計測されたたわみ量が所定の閾値以下でない場合、懸下部材193の長さを再度変更することにある。
【0036】
計測部195は、懸下部材193の長さが天井天板間隔に変更された後、天板67のたわみ量を再度計測する。
【0037】
記憶部13は、所定の閾値を記憶する。なお、所定の閾値は、駆動制御部197における図示していないメモリに記憶されてもよい。所定の閾値とは、例えば、被検体のサジタル画像において段差が表れない程度のたわみ量である。
【0038】
駆動制御部197は、再計測されたたわみ量と所定の閾値とを比較する。再計測されたたわみ量が所定の閾値を超える場合、駆動制御部197は、再計測されたたわみ量と対応表とに基づいて、天井天板間隔を再度決定する。駆動制御部197は、再度決定された天井天板間隔に複数の懸下部材193各々の長さを変更するために、懸下部材駆動部194を制御する。
【0039】
(たわみ量低減機能)
図8は、第1の実施形態の変形例に係り、天板67のたわみ量を所定の閾値以下にするために、懸下部材駆動部194を制御する処理の流れの一例を示す流れ図である。
【0040】
ステップSb1乃至ステップSb4における処理は、図4におけるステップSa1乃至ステップSa4における処理と同様なため、説明を省略する。ステップSb4の処理の後、たわみ量が再計測される(ステップSb5)。再計測されたたわみ量が、所定の閾値以下であれば、ステップSb3乃至ステップSb5の処理が繰り返される。天板67の移動が終了するまで、ステップSb1乃至ステップSb6における処理が繰り返される(ステップSb7)。上記繰り返しにより、たわみ量は常に所定の閾値以下となる。例えば、ヘリカルなX線コンピュータ断層撮影については、天板67のたわみ量が計測部195によりモニタリングされることにより、たわみ量を常に所定の閾値以下にすることができる。
【0041】
以上に述べた構成によれば、以下の効果を得ることができる。
本実施形態におけるX線コンピュータ断層撮影装置1によれば、長さが可変な懸下部材193により天井から天板支持機構191を懸下することで、計測された天板67のたわみ量に応じて懸下部材193の長さを変更することができる。これにより、天板67のたわみ量を減少させることができ、画像をz方向につないだとき、天板67のたわみに応じた段差が低減された全体画像を提供することができる。また、天板支持機構191の直下のスペースを開放的に利用することができる。これにより、被検体Pを天板67へ移動させる作業において介護者への身体的負担が軽減され、ストレッチャーから天板67への被検体Pの移動に関する効率が向上する。加えて、移動型フットスイッチ等は、自由に床に配置させることができる。さらに緊急時等において、懸下部材193の長さを変更することにより被検体Pの足元近傍を床に近づけることができ、被検体を緊急退避させやすくなる。
【0042】
(第2の実施形態)
第1の実施形態との相違は、以下の通りである。まず、X線コンピュータ断層撮影前における被検体Pの透視画像またはサイノグラムに基づいて、移動された天板67の移動量に対するたわみ量を決定する。次いで、懸下部材193の長さを、決定されたたわみ量と移動量とに応じて変更することにある。
【0043】
図9は、第2の実施形態に係るX線コンピュータ断層撮影装置1の構成を示す図である。
画像発生部20は、前処理部7から出力された投影データに基づいて、被検体Pの透視画像またはサイノグラムを発生する。
【0044】
たわみ量決定部199は、被検体Pの透視画像またはサイノグラムに基づいて、スライドされた天板67の移動量に対するたわみ量を決定する。移動量とは、例えば、天板支持機構191の直上に配置された天板67の位置から、天板67を移動させた後の天板67の位置までの長さである。天板67の位置とは、天板67に設けられた印であって、例えば天板67の先端である。たわみ量とは、透視画像間またはサイノグラム間における段差に対応する。
【0045】
駆動制御部197は、たわみ量決定部199で決定されたたわみ量を低減させるために、懸下部材駆動部194を制御する。具体的には、駆動制御部197は、決定されたたわみ量と対応表とに基づいて、天井天板間隔を決定する。上記対応表は、駆動制御部197における図示していないメモリなどに予め記憶される。駆動制御部197は、移動量に応じて決定された天井天板間隔に複数の懸下支持部材193各々の長さを変更するために、懸下部材駆動部194を制御する。
【0046】
(たわみ量低減機能)
図10は、天板67のたわみ量に応じて懸下部材193の長さを変更するために、懸下部材駆動部194を制御する処理の流れの一例を示す流れ図である。
【0047】
天板67を移動させて、X線による撮影を実行することにより、透視画像またはサイノグラムが発生される(ステップSc1)。透視画像またはサイノグラムに基づいて、天板67の移動量に対するたわみ量が決定される(ステップSc2)。決定されたたわみ量と対応表とに基づいて、天井天板間隔が移動量ごとに決定される(ステップSc3)。
【0048】
次いで、X線コンピュータ断層撮影が開始される(ステップSc4)。この時、天板67が移動される(ステップSc5)。天板67の移動量に応じて、懸下部材駆動部194により、懸下部材193の長さが、天井天板間隔に変更される(ステップSc6)。X線コンピュータ断層撮影が終了するまで、ステップSc5とステップSc6との処理が繰り返される(ステップSc7)。
【0049】
以上に述べた構成によれば、以下の効果を得ることができる。
本実施形態におけるX線コンピュータ断層撮影装置1によれば、長さが可変な懸下部材193により天井から天板支持機構191を懸下することで、X線コンピュータ断層撮影前に撮影された透視画像またはサイノグラムに基づいて決定された天板67のたわみ量に応じて、懸下部材193の長さを変更することができる。これにより、X線コンピュータ断層撮影において、天板67の移動量に応じた天板67のたわみ量を減少させることができる。このことから、画像をz方向につないだとき、天板67のたわみに応じた段差が低減された全体画像を提供することができる。また、天板支持機構191の直下のスペースを開放的に利用することができる。これにより、被検体Pを天板67へ移動させる作業において介護者への身体的負担が軽減され、ストレッチャーから天板67への被検体Pの移動に関する効率が向上する。加えて、移動型フットスイッチ等は、自由に床に配置させることができる。さらに緊急時等において、被検体Pの足元近傍を床に近づけることができ、被検体Pを緊急退避させやすくなる。
【0050】
(第3の実施形態)
第1、第2の実施形態との相違は、天板67を撮影領域59に向けて移動させる前に、懸下部材193をガントリ5側に移動させることにより天板支持機構191をガントリ7の開口部に近づけることにある。
【0051】
図11は、第3の実施形態に係るX線コンピュータ断層撮影装置1の構成を示す図である。
懸下部材移動部200は、懸下部材193をガントリ5側に移動させる。これにより、天板支持機構191は、ガントリ5の開口部に近接する。具体的には、懸下部材移動部200は、天井に設けられた図示していないレールと、レールから複数の懸下部材193を吊り下げる図示していないベースと、レールに沿ってベースを移動させるためにベースを駆動する図示していないベース駆動部とを有する。ホストコントローラ17からの指示に従って、ベース駆動部は、ベースを駆動させる。これにより、ベースは、レールに沿って移動する。
【0052】
(たわみ量低減機能)
図12は、天板67のたわみ量に応じて懸下部材193の長さを変更するために懸下部材駆動部194を制御する処理の流れの一例を示す流れ図である。
【0053】
天板67に被検体Pが載置される(ステップSd1)。天板支持機構191をガントリ5の開口部に近接させるために、懸下部材193が移動される(ステップSd2)。ステップSd3乃至ステップSd7における処理は、図4のステップSa1乃至ステップSa5における処理にそれぞれ対応するため、説明を省略する。
【0054】
以上に述べた構成によれば、以下の効果を得ることができる。
本実施形態におけるX線コンピュータ断層撮影装置1によれば、長さが可変な懸下部材193により天井から天板支持機構191を懸下することで、天板67のたわみ量に応じて、懸下部材193の長さを変更することができる。加えて、本X線コンピュータ断層撮影装置1によれば、天板67を移動させる前に懸下部材193をガントリ5側へ移動させることができる。これらにより、X線コンピュータ断層撮影において、天板67のたわみ量を減少させることができる。以上のことから、画像をz方向につないだとき、天板67のたわみに応じた段差が低減された全体画像を提供することができる。また、天板支持機構191の直下のスペースを開放的に利用することができる。これにより、被検体Pを天板67へ移動させる作業において介護者への身体的負担が軽減され、ストレッチャーから天板67への被検体Pの移動に関する効率が向上する。加えて、移動型フットスイッチ等は、自由に床に配置させることができる。さらに緊急時等において、被検体Pの足元近傍を床に近づけることができ、被検体Pを緊急退避させやすくなる。
【0055】
上記実施形態の変形例として、本X線コンピュータ断層撮影装置1における天板支持機構懸下装置19の技術的思想は、核医学診断装置、X線診断装置、核磁気共鳴装置などの他の医用画像診断装置で実現することも可能である。このとき、他の医用画像診断装置は、例えば図1、図9、図11の構成図における点線内の構成要素(天板支持機構懸下装置19)を有するものとなる。たわみ量低減機能における各処理は、第1乃至第3の実施形態と同様である。加えて、各実施形態に係る各機能は、当該処理を実行するプログラムをワークステーション等のコンピュータにインストールし、これらをメモリ上で展開することによっても実現することができる。このとき、コンピュータに当該手法を実行させることのできるプログラムは、磁気ディスク(フロッピー(登録商標)ディスク、ハードディスクなど)、光ディスク(CD−ROM、DVDなど)、半導体メモリなどの記憶媒体に格納して頒布することも可能である。
【0056】
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【符号の説明】
【0057】
1…X線コンピュータ断層撮影装置、3…高電圧発生部、5…ガントリ、7…前処理部、9…再構成処理部、11…表示部、13…記憶部、15…入力部、17…ホストコントローラ、19…天板支持機構懸下装置、20…画像発生部、51…回転フレーム、53…回転駆動部、55…X線管、57…エリア検出器、59…撮影領域、61…スリップリング、63…コリメーターユニット、65…X線の放射範囲、67…天板、69…データ収集回路(DAS)、71…非接触データ伝送部、191…天板支持機構、193…懸下部材、194…懸下部材駆動部、195…計測部、197…駆動制御部、199…たわみ量決定部、200…懸下部材移動部、1951…電磁波送受信部
【技術分野】
【0001】
本発明の実施形態は、天板支持機構を懸下する天板支持機構懸下装置に関する。
【背景技術】
【0002】
従来、X線コンピュータ断層撮影装置などの医用画像診断装置に装備される寝台は、被検体を載置する天板を片側で支える構造を採用している。被検体が載置された天板は、撮影可能位置へ水平移動により移動される。このとき、図13に示すように、天板それ自体の重み及び被検体の体重により天板が下方に変形する“たわみ”が発生する。このたわみにより、例えば、X線管等の回転軸(z軸)に沿って撮影位置を変えながらボリュームスキャンを繰り返すとき、このz軸に長く合成した全体画像において、このボリュームスキャン切り替え位置に段差が発生する問題がある。
【0003】
また、天板支持機構の直下に足場の設置が望まれている。ここで、足場とは、例えば、ストレッチャーに載置された被検体の天板への移動にあたって、被検体を天板に移動させる介護者の足を置く場所である。足場の設置にあたって、床に対する寝台の設置面積は、できるだけ狭くされる。また、介護者が天板スライド機構の直下を踏んでも大丈夫な構造が、採用されている。しかしながら、図14に示すように、天板支持機構の直下のスペースには、床から天板までの高さ(以下寝台の高さと呼ぶ)を可変させる機構などが内蔵されるため、上記要望を満たすための上記構造は根本的な改善ではなく、天板支持機構の直下のスペースを開放的に利用できない問題がある。
【発明の概要】
【発明が解決しようとする課題】
【0004】
目的は、撮影領域における天板のたわみを低減させ、天板支持機構直下に足場を形成することにある。
【課題を解決するための手段】
【0005】
本実施形態に係る天板支持機構懸下装置は、天板を移動可能に支持する天板支持機構と、前記天板支持機構を天井から懸下する長さが可変な複数の懸下部材と、前記複数の懸架部材各々の長さを変更する複数の懸下部材駆動部と、前記天板支持機構により移動された前記天板に関するたわみ量を計測する計測部と、前記たわみ量に応じて前記複数の懸下部材の長さを個々に制御する駆動制御部と、を具備することを特徴とする。
【図面の簡単な説明】
【0006】
【図1】図1は、第1の実施形態に係るX線コンピュータ断層撮影装置の構成を示す図である。
【図2】図2は、第1の実施形態に係るガントリと、天板支持機構と、懸下部材との斜視図である。
【図3】図3は、第1の実施形態に係る天板支持機構を、天井からみた上面の一例を示す上面図である。
【図4】図4は、第1の実施形態に係り、天板のたわみ量に応じて懸下部材の長さを変更するために懸下部材駆動部を制御する処理の流れの一例を示す流れ図である。
【図5】図5は、第1の実施形態に係り、撮影領域に移動された天板と、天板支持機構と、懸下部材との側面の一例を示す側面図である。
【図6】図6は、第1の実施形態に係る天板支持機構と懸下部材との側面を示す側面図である。
【図7】図7は、第1の実施形態に係り、たわみ量を低減させるために懸下部材駆動部を制御した後における天板支持機構お懸下部材との側面を示す側面図である。
【図8】図8は、第1の実施形態の変形例に係り、天板のたわみ量を所定の閾値以下にするために、懸下部材駆動部を制御する処理の流れの一例を示す流れ図である。
【図9】図9は、第2の実施形態に係り、X線コンピュータ断層撮影装置の構成を示す図である。
【図10】図10は、第2の実施形態に係り、天板のたわみ量に応じて懸下部材の長さを変更するために懸下部材駆動部を制御する処理の流れの一例を示す流れ図である。
【図11】図11は、第3の実施形態に係り、X線コンピュータ断層撮影装置の構成を示す図である。
【図12】図12は、第3の実施形態に係り、天板のたわみ量に応じて懸下部材の長さを変更するために懸下部材駆動部を制御する処理の流れの一例を示す流れ図である。
【図13】図13は、従来の寝台に係り、天板支持機構の側面を天板の側面ととともに示す側面図である。
【図14】図14は、従来の寝台に係り、天板の上面を示す上面図である。
【発明を実施するための形態】
【0007】
以下、X線コンピュータ断層撮影装置(Computed Tomography)の実施形態について図面を参照しながら説明する。なお、X線コンピュータ断層撮影装置には、X線管とX線検出器とが一体として被検体の周囲を回転するRotate/Rotate−Type、リング状にアレイされた多数のX線検出素子が固定され、X線管のみが被検体の周囲を回転するStationary/Rotate−Type等様々なタイプがあり、いずれのタイプでも本実施形態へ適用可能である。また、画像を再構成するには被検体の周囲一周、360°分の投影データが、またハーフスキャン法でも180°+ファン角度分の投影データが必要とされる。いずれの再構成方式に対しても本実施形態へ適用可能である。また、入射X線を電荷に変化するメカニズムは、シンチレータ等の蛍光体でX線を光に変換し更にその光をフォトダイオード等の光電変換素子で電荷に変換する間接変換形と、X線によるセレン等の半導体内での電子正孔対の生成及びその電極への移動すなわち光導電現象を利用した直接変換形とが主流である。X線検出素子としては、それらのいずれの方式を採用してもよい。さらに、近年では、X線管とX線検出器との複数のペアを回転リングに搭載したいわゆる多管球型のX線コンピュータ断層撮影装置の製品化が進み、その周辺技術の開発が進んでいる。本実施形態においては、従来からの一管球型のX線コンピュータ断層撮影装置であっても、多管球型のX線コンピュータ断層撮影装置であってもいずれも適用可能である。ここでは、一管球型として説明する。
【0008】
なお、以下の説明において、略同一の機能及び構成を有する構成要素については、同一符号を付し、重複説明は必要な場合にのみ行う。
【0009】
(第1の実施形態)
図1は、第1の実施形態に係るX線コンピュータ断層撮影装置1の構成を示す図である。
第1の実施形態に係るX線コンピュータ断層撮影装置1は、高電圧発生部3、ガントリ5、前処理部7、再構成処理部9、表示部11、記憶部13、入力部15、ホストコントローラ17、天板支持機構懸下装置19を有する。
【0010】
高電圧発生部3は、X線管55に供給するための高電圧を発生する。図1において、高電圧発生部3は、ガントリ5の外部に設けられている。なお、高電圧発生部3は、後述する回転フレーム51に搭載されてもよい。以下、説明の便宜上、高電圧発生部3は、ガントリ5の外部に設けられているものとする。
【0011】
ガントリ5には、回転支持機構が収容される。回転支持機構は、回転フレーム51と、回転軸Zを中心として回転自在に回転フレーム51を支持するフレーム支持機構と回転フレーム51の回転を駆動する回転駆動部53とを有する。回転フレーム51には、X線管55と、2次元アレイ型または多列型とも称されるエリア検出器57とが搭載される。エリア検出器57は、撮影領域59を挟んでX線管55に対向する。X線管55は、スリップリング61を介して、高電圧発生部3に電気的に接続される。回転駆動部53は、後述するホストコントローラ17による制御の下で、ダイレクトドライブまたはベルトドライブにより、回転フレーム51を回転させる。
【0012】
X線管55は、スリップリング61を介して高電圧発生部3から電圧の印加および電流の供給を受けて、X線の焦点からX線を放射する。X線の焦点から放射されたX線は、X線管55のX線放射窓に取り付けられたコリメーターユニット63により、例えばコーンビーム形(角錐形)に整形される。X線の放射範囲は、点線65で示されている。X軸は、回転軸Zと直交し、放射されるX線の焦点を通る直線である。Y軸は、X軸および回転軸Zと直交する直線である。なお、説明の便宜上このXYZ座標系は、回転軸Zを中心として回転する回転座標系として説明する。
【0013】
エリア検出器57は、回転軸Zを挟んでX線管55に対峙する位置およびアングルで取り付けられる。エリア検出器57は、複数のX線検出素子を有する。ここでは、単一のX線検出素子が単一のチャンネルを構成しているものとして説明する。複数のチャンネルは、回転軸Zに直交し、かつ放射されるX線の焦点を中心として、この中心から1チャンネル分のX線検出素子の受光部中心までの距離を半径とする円弧方向(チャンネル方向)とZ方向との2方向に関して2次元状に配列される。また、エリア検出器57は、複数のX線検出素子を1列に配列した複数のモジュールで構成されてもよい。モジュール各々は、上記チャンネル方向に沿って略円弧方向に1次元状に配列される。
【0014】
また複数のX線検出素子は、チャンネル方向とスライス方向との2方向に関して2次元状に配列させてもよい。すなわち、2次元状の配列は、上記チャンネル方向に沿って一次元状に配列された複数のチャンネルを、スライス方向に関して複数列並べて構成される。このような2次元状のX線検出素子配列を有するエリア検出器57は、略円弧方向に1次元状に配列される複数の上記モジュールをスライス方向に関して複数列並べて構成されてもよい。
【0015】
撮影又はスキャンに際しては、X線管55とエリア検出器57との間の円筒形の撮影領域59内に、被検体Pが天板67に載置され挿入される。エリア検出器57の出力側には、DAS(Data Acquisition System)と呼ばれるデータ収集回路69が接続される。
【0016】
データ収集回路69には、エリア検出器57の各チャンネルの電流信号を電圧に変換するI−V変換器と、この電圧信号をX線の曝射周期に同期して周期的に積分する積分器と、この積分器の出力信号を増幅するアンプと、このアンプの出力信号をディジタル信号変換するアナログ・ディジタル・コンバータとが、チャンネルごとに取り付けられている。データ収集回路69から出力されるデータ(純生データ(pure raw data))は、磁気送受信又は光送受信を用いた非接触データ伝送部71を経由して、前処理部7に伝送される。
【0017】
前処理部7は、データ収集回路69から出力される純生データに対して前処理を施す。前処理には、例えばチャンネル間の感度不均一補正処理、X線強吸収体、主に金属部による極端な信号強度の低下または、信号脱落を補正する処理等が含まれる。前処理部7から出力される再構成処理直前のデータ(生データ(raw data)または、投影データと称される、ここでは投影データという)は、データ収集したときにビューアングルを表すデータと関連付けられて、磁気ディスク、光磁気ディスク、又は半導体メモリを備えた記憶部13に記憶される。
【0018】
なお、投影データとは、被検体を透過したX線の強度に応じたデータ値の集合である。ここでは説明の便宜上、ワンショットで略同時に収集したビューアングルが同一である全チャンネルにわたる一揃いの投影データを、投影データセットと称する。また、ビューアングルは、X線管55が回転軸Zを中心として周回する円軌道の各位置を、回転軸Zから鉛直上向きにおける円軌道の最上部を0°として360°の範囲の角度で表したものである。なお、投影データセットの各チャンネルに対する投影データは、ビューアングル、コーン角、チャンネル番号によって識別される。また、投影データセットの各チャンネルに対する投影データは、X線管55から放出されるX線のエネルギーに応じて、識別されてもよい。
【0019】
再構成処理部9は、ビューアングルが360°又は180°+ファン角度の範囲内の投影データセットに基づいて、フェルドカンプ法またはコーンビーム再構成法により、略円柱形の3次元画像を再構成する機能を有する。ボリュームデータにおけるスライス面に垂直な方向(Z方向)の端の領域には、撮像視野(Field of view)の領域を再構成するための360°分の投影データがそろわない領域が存在する。投影データが不足する領域は、ボリュームデータの信頼性が低い。投影データが不足する領域は、再構成しない又は再構成画像を表示しない。この領域は一般にマスク(MASK)領域と称される。フェルドカンプ法は、コーンビームのように再構成面に対して投影レイが交差する場合の再構成法である。フェルドカンプ法は、コーン角が小さいことを前提として畳み込みの際にはコーンビームをファン投影ビームとみなして再構成処理し、逆投影においてはスキャンの際のレイに沿って再構成処理する近似的画像再構成法である。コーンビーム再構成法は、フェルドカンプ法よりもコーン角のエラーが抑えられる方法として、再構成面に対するレイの角度に応じて投影データを補正する再構成法である。
【0020】
表示部11は、再構成処理部9で再構成された医用画像、X線コンピュータ断層撮影のために設定される条件などを表示する。
【0021】
記憶部13は、再構成処理部9で再構成された医用画像(以下再構成画像と呼ぶ)を記憶する。記憶部13は、後述する入力部15により入力された操作者の指示、画像処理の条件、撮影条件などの情報を記憶する。記憶部13は、前処理部7から出力された投影データを記憶する。記憶部13は、X線コンピュータ断層撮影のために高電圧発生部3、ガントリ5、後述する天板支持機構懸下装置19などを制御する制御プログラムを記憶する。
【0022】
入力部15は、操作者が所望するX線コンピュータ断層撮影の撮影条件、所定の値などを入力する。具体的には、入力部15は、操作者からの各種指示・命令・情報・選択・設定を本X線コンピュータ断層撮影装置1に取り込む。入力部15は、図示しないが、関心領域の設定などを行うためのトラックボール、スイッチボタン、マウス、キーボード等を有する。入力部15は、表示画面上に表示されるカーソルの座標を検出し、検出した座標をホストコントローラ17に出力する。なお、入力部15は、表示画面を覆うように設けられたタッチパネルでもよい。この場合、入力部15は、電磁誘導式、電磁歪式、感圧式等の座標読み取り原理でタッチ指示された座標を検出し、検出した座標をホストコントローラ17に出力する。
【0023】
ホストコントローラ17は、本X線コンピュータ断層撮影装置1の中枢として機能する。ホストコントローラ17は、図示しないCPUを備える。ホストコントローラ17は、記憶部13に記憶された制御プログラムに基づいて、X線コンピュータ断層撮影のために高電圧発生部3、ガントリ5、天板支持機構懸下装置19などを制御する。ホストコントローラ17は、所定の画像発生・表示等を実行するための制御プログラムを、記憶部13から読み出して自身が有するメモリ上に展開し、各種処理に関する演算・処理等を実行する。
【0024】
天板支持機構懸下装置19は、天板支持機構191、懸下部材193、懸下部材駆動部194、計測部195、駆動制御部197を有する。図2は、天板支持機構191と、懸下部材193と、ガントリ5との斜視図である。図3は、天板支持機構191を天井から見た上面図である。
【0025】
天板支持機構191は、図示していない天板駆動部による駆動により、被検体Pが載置された天板67を、ガントリ5の撮影領域59内へ移動させる。
【0026】
懸下部材193は、天板支持機構191を天井から懸下する。複数の懸架部材193各々は、天板支持機構191を天井から懸下する長さが可変な機能(以下、長さ可変機能と呼ぶ)を有する。懸下部材193は、例えば、ギアとラックとで構成される。なお、懸下部材193は、ワイヤのように天板支持機構191を天井から吊り下げる部材であってもよい。また、懸下部材193は、インナーチューブとアウターチューブとを組み合わせて液体を封入した部材であってもよい。なお、懸下部材193と天板支持機構との間には、任意の方向に回転可能な図示していない取付部を有していてもよい。
【0027】
懸下部材駆動部194は、後述する駆動制御部197からの指示に従って、複数の懸下部材193各々の長さを変更する。具体的には、複数の懸下部材駆動部194は、複数の懸下部材193にそれぞれ対応して設けられる。例えば、懸下部材193がギアとラックとで構成される場合、懸下部材駆動部194は、このギアを駆動させるモータである。また、懸下部材193がワイヤで構成される場合、懸下部材駆動部194は、このワイヤを巻いたり緩めたりするモータである。また、懸下部材193がインナーチューブとアウターチューブとを組み合わせて液体を封入した部材である場合、懸下部材駆動部194は、懸下部材193の長さを変更するために、この封入された液体の圧力を調整する圧力調整器であってもよい。なお、懸下部材駆動部194は、緊急時等において、被検体Pの足元近傍を床に近づけるために、懸下部材193の長さを変更することも可能である。
【0028】
計測部195は、天板支持機構191により移動された天板67のたわみ量(以下、たわみ量と呼ぶ)を計測する。例えば、計測部195は、所定の位置から天板67に向けて電磁波を照射し、反射波が戻ってくるまでの時間を計測することにより、たわみ量を計測する。所定の位置とは、例えば、ガントリ5内の天板直下である。具体的には、計測部195は、例えば、電磁波送受信部を有する。電磁波送受信部は、例えば、撮影領域59に挿入される天板67の下方におけるガントリ5内に設置される。撮影領域59に天板67が挿入されると、電磁波送受信部は、天板に向けて電磁波を照射する。電磁波送受信部は、天板で反射された反射電磁波を受信する。計測部195は、電磁波の送受信における時間間隔に電磁波の速度をかけることにより、電磁波送受信部から天板までの距離を計算する。計測部195は、電磁波送受信部とスライドされる前の天板67の水平位置との距離(以下、基準距離と呼ぶ)から、計算された距離を差分することにより、天板67のたわみ量を得る。基準距離は、例えば、計測部195における図示していないメモリなどに予め記憶される。なお、電磁波送受信部は、例えばレーザー送受信部であってもよい。
【0029】
駆動制御部197は、計測部195で計測されたたわみ量に応じて、複数の懸下部材193の長さを個々に制御する。具体的には、駆動制御部197は、計測部195で計測されたたわみ量を低減させるために、たわみ量に応じて、複数の懸下部材駆動部194を個々に制御する。例えば、駆動制御部197は、たわみ量に対する天井と天板支持機構191との間隔(以下、天井天板間隔と呼ぶ)の対応表と、計測されたたわみ量とに基づいて、天井天板間隔を決定する。上記対応表は、駆動制御部197における図示していないメモリなどに予め記憶される。駆動制御部197は、複数の支持部材各々の長さを決定された天井天板間隔に変更するために、懸下部材駆動部194を制御する。
【0030】
(たわみ量低減機能)
たわみ量低減機能とは、計測されたたわみ量に基づいて決定された天井天板間隔に懸下部材193の長さを変更するために懸下部材駆動部194を制御することにより、たわみ量を低減させる機能である。以下、たわみ量低減機能に関する処理(以下、たわみ量低減処理と呼ぶ)について説明する。
【0031】
図4は、天板67のたわみ量に応じて懸下部材193の長さを変更するために懸下部材駆動部194を制御する処理の流れの一例を示す流れ図である。
【0032】
天板支持機構191を駆動させることにより、天板67がガントリ5における撮影領域59に移動される(ステップSa1)。図5は、撮影領域59に移動された天板67と、天板支持機構191と、懸下部材193との側面の一例を示す側面図である。図5に示すように、被検体Pを載置した天板67が撮影領域59に移動されると、天板67にたわみが発生する。たわみ量が、計測部195により計測される(ステップSa2)。計測されるたわみ量は、例えば、図5における点線の両端矢印aで示されている。図5における実線の両端矢印bは、電磁波送受信部1951から放射された電磁波と、天板67から反射された反射波との軌跡である。図5における実線の両端矢印cは、基準距離を示す。
【0033】
天井天板間隔が、計測されたたわみ量と対応表とに基づいて、決定される(ステップSa3)。懸下部材駆動部194により、懸下部材193の長さが、決定された天井天板間隔に変更される(ステップSa4)。図6は、第1の実施形態に係る天板支持機構191と懸下部材193との側面を示す側面図である。図6における矢印は、決定された天井天板間隔に懸下部材193の長さを変更するために、懸下部材193が伸縮される方向を示している。図7は、たわみ量を低減させるために懸下部材駆動部194を制御した後における天板支持機構191と懸下部材193との側面を示す側面図である。ステップSa4における処理により、たわみ量が低減される。
【0034】
天板67のスライドが終了するまで、ステップSa1乃至ステップSa4における処理が繰り返される(ステップSa5)。上記繰り返しにより、例えば、非ヘリカルなX線コンピュータ断層撮影において、ボリュームスキャンごとに天板67のたわみ量が低減される。
【0035】
(変形例)
第1の実施形態との相違は、懸下部材193の長さの変更後にたわみ量を再度計測し、再度計測されたたわみ量が所定の閾値以下でない場合、懸下部材193の長さを再度変更することにある。
【0036】
計測部195は、懸下部材193の長さが天井天板間隔に変更された後、天板67のたわみ量を再度計測する。
【0037】
記憶部13は、所定の閾値を記憶する。なお、所定の閾値は、駆動制御部197における図示していないメモリに記憶されてもよい。所定の閾値とは、例えば、被検体のサジタル画像において段差が表れない程度のたわみ量である。
【0038】
駆動制御部197は、再計測されたたわみ量と所定の閾値とを比較する。再計測されたたわみ量が所定の閾値を超える場合、駆動制御部197は、再計測されたたわみ量と対応表とに基づいて、天井天板間隔を再度決定する。駆動制御部197は、再度決定された天井天板間隔に複数の懸下部材193各々の長さを変更するために、懸下部材駆動部194を制御する。
【0039】
(たわみ量低減機能)
図8は、第1の実施形態の変形例に係り、天板67のたわみ量を所定の閾値以下にするために、懸下部材駆動部194を制御する処理の流れの一例を示す流れ図である。
【0040】
ステップSb1乃至ステップSb4における処理は、図4におけるステップSa1乃至ステップSa4における処理と同様なため、説明を省略する。ステップSb4の処理の後、たわみ量が再計測される(ステップSb5)。再計測されたたわみ量が、所定の閾値以下であれば、ステップSb3乃至ステップSb5の処理が繰り返される。天板67の移動が終了するまで、ステップSb1乃至ステップSb6における処理が繰り返される(ステップSb7)。上記繰り返しにより、たわみ量は常に所定の閾値以下となる。例えば、ヘリカルなX線コンピュータ断層撮影については、天板67のたわみ量が計測部195によりモニタリングされることにより、たわみ量を常に所定の閾値以下にすることができる。
【0041】
以上に述べた構成によれば、以下の効果を得ることができる。
本実施形態におけるX線コンピュータ断層撮影装置1によれば、長さが可変な懸下部材193により天井から天板支持機構191を懸下することで、計測された天板67のたわみ量に応じて懸下部材193の長さを変更することができる。これにより、天板67のたわみ量を減少させることができ、画像をz方向につないだとき、天板67のたわみに応じた段差が低減された全体画像を提供することができる。また、天板支持機構191の直下のスペースを開放的に利用することができる。これにより、被検体Pを天板67へ移動させる作業において介護者への身体的負担が軽減され、ストレッチャーから天板67への被検体Pの移動に関する効率が向上する。加えて、移動型フットスイッチ等は、自由に床に配置させることができる。さらに緊急時等において、懸下部材193の長さを変更することにより被検体Pの足元近傍を床に近づけることができ、被検体を緊急退避させやすくなる。
【0042】
(第2の実施形態)
第1の実施形態との相違は、以下の通りである。まず、X線コンピュータ断層撮影前における被検体Pの透視画像またはサイノグラムに基づいて、移動された天板67の移動量に対するたわみ量を決定する。次いで、懸下部材193の長さを、決定されたたわみ量と移動量とに応じて変更することにある。
【0043】
図9は、第2の実施形態に係るX線コンピュータ断層撮影装置1の構成を示す図である。
画像発生部20は、前処理部7から出力された投影データに基づいて、被検体Pの透視画像またはサイノグラムを発生する。
【0044】
たわみ量決定部199は、被検体Pの透視画像またはサイノグラムに基づいて、スライドされた天板67の移動量に対するたわみ量を決定する。移動量とは、例えば、天板支持機構191の直上に配置された天板67の位置から、天板67を移動させた後の天板67の位置までの長さである。天板67の位置とは、天板67に設けられた印であって、例えば天板67の先端である。たわみ量とは、透視画像間またはサイノグラム間における段差に対応する。
【0045】
駆動制御部197は、たわみ量決定部199で決定されたたわみ量を低減させるために、懸下部材駆動部194を制御する。具体的には、駆動制御部197は、決定されたたわみ量と対応表とに基づいて、天井天板間隔を決定する。上記対応表は、駆動制御部197における図示していないメモリなどに予め記憶される。駆動制御部197は、移動量に応じて決定された天井天板間隔に複数の懸下支持部材193各々の長さを変更するために、懸下部材駆動部194を制御する。
【0046】
(たわみ量低減機能)
図10は、天板67のたわみ量に応じて懸下部材193の長さを変更するために、懸下部材駆動部194を制御する処理の流れの一例を示す流れ図である。
【0047】
天板67を移動させて、X線による撮影を実行することにより、透視画像またはサイノグラムが発生される(ステップSc1)。透視画像またはサイノグラムに基づいて、天板67の移動量に対するたわみ量が決定される(ステップSc2)。決定されたたわみ量と対応表とに基づいて、天井天板間隔が移動量ごとに決定される(ステップSc3)。
【0048】
次いで、X線コンピュータ断層撮影が開始される(ステップSc4)。この時、天板67が移動される(ステップSc5)。天板67の移動量に応じて、懸下部材駆動部194により、懸下部材193の長さが、天井天板間隔に変更される(ステップSc6)。X線コンピュータ断層撮影が終了するまで、ステップSc5とステップSc6との処理が繰り返される(ステップSc7)。
【0049】
以上に述べた構成によれば、以下の効果を得ることができる。
本実施形態におけるX線コンピュータ断層撮影装置1によれば、長さが可変な懸下部材193により天井から天板支持機構191を懸下することで、X線コンピュータ断層撮影前に撮影された透視画像またはサイノグラムに基づいて決定された天板67のたわみ量に応じて、懸下部材193の長さを変更することができる。これにより、X線コンピュータ断層撮影において、天板67の移動量に応じた天板67のたわみ量を減少させることができる。このことから、画像をz方向につないだとき、天板67のたわみに応じた段差が低減された全体画像を提供することができる。また、天板支持機構191の直下のスペースを開放的に利用することができる。これにより、被検体Pを天板67へ移動させる作業において介護者への身体的負担が軽減され、ストレッチャーから天板67への被検体Pの移動に関する効率が向上する。加えて、移動型フットスイッチ等は、自由に床に配置させることができる。さらに緊急時等において、被検体Pの足元近傍を床に近づけることができ、被検体Pを緊急退避させやすくなる。
【0050】
(第3の実施形態)
第1、第2の実施形態との相違は、天板67を撮影領域59に向けて移動させる前に、懸下部材193をガントリ5側に移動させることにより天板支持機構191をガントリ7の開口部に近づけることにある。
【0051】
図11は、第3の実施形態に係るX線コンピュータ断層撮影装置1の構成を示す図である。
懸下部材移動部200は、懸下部材193をガントリ5側に移動させる。これにより、天板支持機構191は、ガントリ5の開口部に近接する。具体的には、懸下部材移動部200は、天井に設けられた図示していないレールと、レールから複数の懸下部材193を吊り下げる図示していないベースと、レールに沿ってベースを移動させるためにベースを駆動する図示していないベース駆動部とを有する。ホストコントローラ17からの指示に従って、ベース駆動部は、ベースを駆動させる。これにより、ベースは、レールに沿って移動する。
【0052】
(たわみ量低減機能)
図12は、天板67のたわみ量に応じて懸下部材193の長さを変更するために懸下部材駆動部194を制御する処理の流れの一例を示す流れ図である。
【0053】
天板67に被検体Pが載置される(ステップSd1)。天板支持機構191をガントリ5の開口部に近接させるために、懸下部材193が移動される(ステップSd2)。ステップSd3乃至ステップSd7における処理は、図4のステップSa1乃至ステップSa5における処理にそれぞれ対応するため、説明を省略する。
【0054】
以上に述べた構成によれば、以下の効果を得ることができる。
本実施形態におけるX線コンピュータ断層撮影装置1によれば、長さが可変な懸下部材193により天井から天板支持機構191を懸下することで、天板67のたわみ量に応じて、懸下部材193の長さを変更することができる。加えて、本X線コンピュータ断層撮影装置1によれば、天板67を移動させる前に懸下部材193をガントリ5側へ移動させることができる。これらにより、X線コンピュータ断層撮影において、天板67のたわみ量を減少させることができる。以上のことから、画像をz方向につないだとき、天板67のたわみに応じた段差が低減された全体画像を提供することができる。また、天板支持機構191の直下のスペースを開放的に利用することができる。これにより、被検体Pを天板67へ移動させる作業において介護者への身体的負担が軽減され、ストレッチャーから天板67への被検体Pの移動に関する効率が向上する。加えて、移動型フットスイッチ等は、自由に床に配置させることができる。さらに緊急時等において、被検体Pの足元近傍を床に近づけることができ、被検体Pを緊急退避させやすくなる。
【0055】
上記実施形態の変形例として、本X線コンピュータ断層撮影装置1における天板支持機構懸下装置19の技術的思想は、核医学診断装置、X線診断装置、核磁気共鳴装置などの他の医用画像診断装置で実現することも可能である。このとき、他の医用画像診断装置は、例えば図1、図9、図11の構成図における点線内の構成要素(天板支持機構懸下装置19)を有するものとなる。たわみ量低減機能における各処理は、第1乃至第3の実施形態と同様である。加えて、各実施形態に係る各機能は、当該処理を実行するプログラムをワークステーション等のコンピュータにインストールし、これらをメモリ上で展開することによっても実現することができる。このとき、コンピュータに当該手法を実行させることのできるプログラムは、磁気ディスク(フロッピー(登録商標)ディスク、ハードディスクなど)、光ディスク(CD−ROM、DVDなど)、半導体メモリなどの記憶媒体に格納して頒布することも可能である。
【0056】
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合わせにより、種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態にわたる構成要素を適宜組み合わせてもよい。
【符号の説明】
【0057】
1…X線コンピュータ断層撮影装置、3…高電圧発生部、5…ガントリ、7…前処理部、9…再構成処理部、11…表示部、13…記憶部、15…入力部、17…ホストコントローラ、19…天板支持機構懸下装置、20…画像発生部、51…回転フレーム、53…回転駆動部、55…X線管、57…エリア検出器、59…撮影領域、61…スリップリング、63…コリメーターユニット、65…X線の放射範囲、67…天板、69…データ収集回路(DAS)、71…非接触データ伝送部、191…天板支持機構、193…懸下部材、194…懸下部材駆動部、195…計測部、197…駆動制御部、199…たわみ量決定部、200…懸下部材移動部、1951…電磁波送受信部
【特許請求の範囲】
【請求項1】
天板を移動可能に支持する天板支持機構と、
前記天板支持機構を天井から懸下する長さが可変な複数の懸下部材と、
前記複数の懸架部材各々の長さを変更する複数の懸下部材駆動部と、
前記天板支持機構により移動された前記天板に関するたわみ量を計測する計測部と、
前記たわみ量に応じて前記複数の懸下部材の長さを個々に制御する駆動制御部と、
を具備することを特徴とする天板支持機構懸下装置。
【請求項2】
前記たわみ量に関する所定の閾値を記憶する記憶部をさらに具備し、
前記駆動制御部は、前記たわみ量を前記所定の閾値以下にするために、前記懸下部材駆動部を制御すること、
を特徴とする請求項1に記載の天板支持機構懸下装置。
【請求項3】
X線を発生するX線管と被検体を透過したX線を検出するX線検出器とを、回転軸周りに回転可能に支持する回転支持機構と、
前記被検体が載置された天板を移動可能に支持する天板支持機構と、
前記天板支持機構を天井から懸下する長さが可変な複数の懸下部材と、
前記複数の懸架部材各々の長さを変更する複数の懸下部材駆動部と、
前記天板支持機構により移動された前記天板に関するたわみ量を計測する計測部と、
前記たわみ量に応じて前記複数の懸下部材の長さを個々に制御する駆動制御部と、
を具備することを特徴とするX線コンピュータ断層撮影装置。
【請求項4】
前記天板支持機構は、非ヘリカルなX線コンピュータ断層撮影に関して、前記天板を複数回にわたって移動させ、
前記計測部は、前記天板に関する複数回の移動ごとに前記たわみ量を計測し、
前記駆動制御部は、前記複数回の移動ごとに計測されたたわみ量に応じて前記複数の懸下部材の長さを個々に制御すること、
を特徴とする請求項3に記載のX線コンピュータ断層撮影装置。
【請求項5】
前記天板支持機構は、ヘリカルなX線コンピュータ断層撮影に関して、前記天板を所定期間にわたって移動させ、
前記計測部は、前記所定期間にわたって前記たわみ量を計測し、
前記駆動制御部は、前記所定期間にわたって計測されたたわみ量に応じて前記複数の懸下部材の長さを個々に制御すること、
を特徴とする請求項3に記載のX線コンピュータ断層撮影装置。
【請求項6】
X線を発生するX線管と被検体を透過したX線を検出するX線検出器とを、回転軸周りに回転可能に支持する回転支持機構と、
前記X線検出器からの出力に基づいて、前記被検体の透視画像またはサイノグラムを発生する画像発生部と、
前記被検体が載置された天板を移動可能に支持する天板支持機構と、
前記天板支持機構を天井から懸下する長さが可変な複数の懸下部材と、
前記複数の懸架部材各々の長さを変更する複数の懸下部材駆動部と、
前記透視画像またはサイノグラムに基づいて、前記天板の移動量に対する前記天板のたわみ量を決定するたわみ量決定部と、
前記たわみ量と前記移動量とに応じて前記複数の懸下部材の長さを個々に制御する駆動制御部と、
を具備することを特徴とするX線コンピュータ断層撮影装置。
【請求項7】
X線を発生するX線管と被検体を透過したX線を検出するX線検出器とを回転軸周りに回転可能に支持する回転支持機構を有する架台と、
前記被検体が載置された天板を移動可能に支持する天板支持機構と、
前記天板支持機構を天井から懸下する長さが可変な複数の懸下部材と、
前記複数の懸架部材各々の長さを変更する複数の懸下部材駆動部と、
前記天板に被検体が載置されることを契機として、前記複数の懸下部材を、前記架台の開口まで移動させる懸下部材移動部と、
前記天板支持機構により移動された前記天板に関するたわみ量を計測する計測部と、
前記たわみ量に応じて前記複数の懸下部材の長さを個々に制御する駆動制御部と、
を具備することを特徴とするX線コンピュータ断層撮影装置。
【請求項8】
被検体が載置された天板を架台の開口へ向かって移動し、
前記移動された天板に関するたわみ量を計測し、
前記たわみ量に応じて、前記天板を移動可能に支持する天板支持機構を天井から懸下する複数の懸架部材の長さを個々に制御すること、
を具備することを特徴とするたわみ量低減方法。
【請求項1】
天板を移動可能に支持する天板支持機構と、
前記天板支持機構を天井から懸下する長さが可変な複数の懸下部材と、
前記複数の懸架部材各々の長さを変更する複数の懸下部材駆動部と、
前記天板支持機構により移動された前記天板に関するたわみ量を計測する計測部と、
前記たわみ量に応じて前記複数の懸下部材の長さを個々に制御する駆動制御部と、
を具備することを特徴とする天板支持機構懸下装置。
【請求項2】
前記たわみ量に関する所定の閾値を記憶する記憶部をさらに具備し、
前記駆動制御部は、前記たわみ量を前記所定の閾値以下にするために、前記懸下部材駆動部を制御すること、
を特徴とする請求項1に記載の天板支持機構懸下装置。
【請求項3】
X線を発生するX線管と被検体を透過したX線を検出するX線検出器とを、回転軸周りに回転可能に支持する回転支持機構と、
前記被検体が載置された天板を移動可能に支持する天板支持機構と、
前記天板支持機構を天井から懸下する長さが可変な複数の懸下部材と、
前記複数の懸架部材各々の長さを変更する複数の懸下部材駆動部と、
前記天板支持機構により移動された前記天板に関するたわみ量を計測する計測部と、
前記たわみ量に応じて前記複数の懸下部材の長さを個々に制御する駆動制御部と、
を具備することを特徴とするX線コンピュータ断層撮影装置。
【請求項4】
前記天板支持機構は、非ヘリカルなX線コンピュータ断層撮影に関して、前記天板を複数回にわたって移動させ、
前記計測部は、前記天板に関する複数回の移動ごとに前記たわみ量を計測し、
前記駆動制御部は、前記複数回の移動ごとに計測されたたわみ量に応じて前記複数の懸下部材の長さを個々に制御すること、
を特徴とする請求項3に記載のX線コンピュータ断層撮影装置。
【請求項5】
前記天板支持機構は、ヘリカルなX線コンピュータ断層撮影に関して、前記天板を所定期間にわたって移動させ、
前記計測部は、前記所定期間にわたって前記たわみ量を計測し、
前記駆動制御部は、前記所定期間にわたって計測されたたわみ量に応じて前記複数の懸下部材の長さを個々に制御すること、
を特徴とする請求項3に記載のX線コンピュータ断層撮影装置。
【請求項6】
X線を発生するX線管と被検体を透過したX線を検出するX線検出器とを、回転軸周りに回転可能に支持する回転支持機構と、
前記X線検出器からの出力に基づいて、前記被検体の透視画像またはサイノグラムを発生する画像発生部と、
前記被検体が載置された天板を移動可能に支持する天板支持機構と、
前記天板支持機構を天井から懸下する長さが可変な複数の懸下部材と、
前記複数の懸架部材各々の長さを変更する複数の懸下部材駆動部と、
前記透視画像またはサイノグラムに基づいて、前記天板の移動量に対する前記天板のたわみ量を決定するたわみ量決定部と、
前記たわみ量と前記移動量とに応じて前記複数の懸下部材の長さを個々に制御する駆動制御部と、
を具備することを特徴とするX線コンピュータ断層撮影装置。
【請求項7】
X線を発生するX線管と被検体を透過したX線を検出するX線検出器とを回転軸周りに回転可能に支持する回転支持機構を有する架台と、
前記被検体が載置された天板を移動可能に支持する天板支持機構と、
前記天板支持機構を天井から懸下する長さが可変な複数の懸下部材と、
前記複数の懸架部材各々の長さを変更する複数の懸下部材駆動部と、
前記天板に被検体が載置されることを契機として、前記複数の懸下部材を、前記架台の開口まで移動させる懸下部材移動部と、
前記天板支持機構により移動された前記天板に関するたわみ量を計測する計測部と、
前記たわみ量に応じて前記複数の懸下部材の長さを個々に制御する駆動制御部と、
を具備することを特徴とするX線コンピュータ断層撮影装置。
【請求項8】
被検体が載置された天板を架台の開口へ向かって移動し、
前記移動された天板に関するたわみ量を計測し、
前記たわみ量に応じて、前記天板を移動可能に支持する天板支持機構を天井から懸下する複数の懸架部材の長さを個々に制御すること、
を具備することを特徴とするたわみ量低減方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2013−106902(P2013−106902A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−256330(P2011−256330)
【出願日】平成23年11月24日(2011.11.24)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月24日(2011.11.24)
【出願人】(000003078)株式会社東芝 (54,554)
【出願人】(594164542)東芝メディカルシステムズ株式会社 (4,066)
【Fターム(参考)】
[ Back to top ]