
天気および地面の反射情報を生成するための方法およびシステム
【課題】天気レーダーリターンデータを三次元バッファに格納する方法およびシステムの提供。
【解決手段】航空機に置かれるシステム30は、レーダー信号を送信し、送信されたレーダー信号のレーダーリターンの結果として、レーダー測定値を生成するレーダー・システム40を含む。三次元バッファ43は、複数の記憶場所を含む。プロセッサ42は、生成されたレーダー測定値に基づいた三次元バッファの記憶場所の反射値と、記憶場所に関して以前に格納された反射値と、不確実性パラメータと生成しまたは更新する。地面エレメントのための正規化されたレーダー断面の不確実性パラメータは、各々のエレメントと関連する地面のタイプに基づいて初期化される。天気反射の不確実性パラメータは、演繹的な情報に基づいて初期化される。生成された反射値は、記憶場所による三次元バッファ装置に格納される。
【解決手段】航空機に置かれるシステム30は、レーダー信号を送信し、送信されたレーダー信号のレーダーリターンの結果として、レーダー測定値を生成するレーダー・システム40を含む。三次元バッファ43は、複数の記憶場所を含む。プロセッサ42は、生成されたレーダー測定値に基づいた三次元バッファの記憶場所の反射値と、記憶場所に関して以前に格納された反射値と、不確実性パラメータと生成しまたは更新する。地面エレメントのための正規化されたレーダー断面の不確実性パラメータは、各々のエレメントと関連する地面のタイプに基づいて初期化される。天気反射の不確実性パラメータは、演繹的な情報に基づいて初期化される。生成された反射値は、記憶場所による三次元バッファ装置に格納される。
【発明の詳細な説明】
【技術分野】
【0001】
[0001] 航空機レーダー・システムから受信されたレーダー信号を得て、それを反射値に変換して、レーダー信号と関連するレンジに関して、それを三次元(3D)天気バッファの場所に格納する試みが実行された。三次元天気バッファは、三次元スペースの中で天気反射の分布を記載するデータを含むコンピュータ・メモリのアレイである。他の試みにおいて、レーダーリターン信号パワーは、特定の仮定に基づく反射に変換され、3D天気バッファのエレメントを配置するのに用いられる。
【0002】
[0002] 以前の試みに関する課題は、所望の気象信号の混乱汚染が発生するというその根拠である。基本の混乱汚染を予防する前の試みは、地面の想定した場所の近位にアンテナ光線の計算を用いており、地面信号散乱プロパティは、信号汚染の程度を決定するために、次いで、それが汚染されるとみなされる場合、信号を抑制するために用いられる。
【0003】
[0003] したがって、より正確に天気情報を識別する必要が存在し、天気レーダー信号から地面混乱汚染を取り除き、または、天気レーダー信号の地面を識別する。
【背景技術】
【0004】
[0004] 米国特許第6,707,415号(それは本願明細書にリファレンスとして組み入れられたものとする)は、地面信号リターンによって比較的汚されていない天気反射を表示する目的のために天気および地面反射を推定し、または、天気によって最小限に汚染される地面反射を推定するためにレーダーを使用する方法を記載する。方法は相対的な不確実性を天気反射の現在の評価において代表するパラメータを利用し、地面は全てのモデリング場所に関してレーダー断面を正規化した。これらのパラメータは、(見積値の不確実性を減らす)新規な測定に応答して更新されることができるかまたは更新されることができない。しかし、いずれにせよ、天気および地面反射の不確実性パラメータのためのスターティング値は、選択されなければならない。
【0005】
[0005] いかなる評価プロセスに関しても、天気および地面反射の別々の評価は、完全でない。時々、若干の気象信号は、増加する推定された地面反射およびその逆も同じ結果となる。
【発明の概要】
【課題を解決するための手段】
【0006】
[0006] 本発明は、三次元バッファに天気レーダー反射データを格納するための方法、システムおよびコンピュータプログラム製品である。方法は、レーダー/航空機を囲んでいる空間のレーダー信号散乱プロパティをモデリングすることを含む。現在のレーダー測定値は、測定プロセスのモデルを使用して測定値の予測と比較される。現在のレーダー測定値と測定値の予測との相違が、格納された反射値を調整するのに用いられる。
【0007】
[0007] 地面の表面の正規化されたレーダー断面(NRCS)の分布は、天気反射評価と類似した方法で推定される。地面に関して、バッファは、三次元天気を記載する3次元よりむしろ、地面の表面を記載するために2次元でNRCS分布を表す。機上レーダーのアプリケーションのうちの1つが、レーダー地面地図を提供することになっているので、本発明は、プロセスの固有の一部として地面地図を提供する。
【0008】
[0008] 前述の概要から直ちに認められるように、本発明は、天気反射配布および地面NRCS配布を別々に推定するためにレーダー信号パワー測定を使用することにより、三次元バッファに記憶するためのより正確な情報を提供する。プロセスは、天気反射および地面NRCSの分布の以前に格納された推定に従って行動している測定プロセスのモデルによって生成される予想される測定値とレーダー測定値との間の相違を用いて分布の評価を反復的に更新することによって実行される。
【0009】
[0009] 本発明の好適な他の実施形態は、以下の図面に関して以下に詳細に記載される。
【図面の簡単な説明】
【0010】
【図1】[0010] 図1は、本発明を実行するシステムのブロック図である;
【図2】[0011] 図2は、図1に示されるシステムによって実行されるフローチャート図を例示する。
【発明を実施するための形態】
【0011】
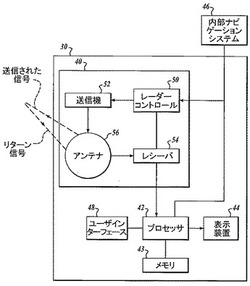
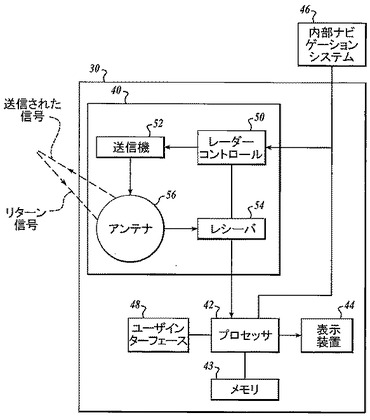
[0012] 本発明は、システム、方法および、三次元レーダーリターンデータを格納するためのコンピュータプログラム製品である。図1は、本発明によって形成される例示のシステム30を例示する。システム30は、気象レーダー・システム40、プロセッサ42、メモリ43、表示装置44、慣性航法装置(INS)46、および、プロセッサ42に連結したユーザ・インタフェース48を含む。表示プロセッサ42は、レーダー・システム40、表示装置44、INS 46およびメモリ43に電気的に結合される。例示のレーダー・システム40は、レーダー・コントローラ50、送信機52、レシーバ54およびアンテナ56を含む。レーダー・コントローラ50は、INS 46または他の航空機システムから受け取られる航空機データ(すなわち、位置、方向、ロール、ヨー、ピッチ、その他)に基づいてアンテナ56を介して信号を送受信することを実行するための送信機52およびレシーバ54を制御する。
【0012】
[0013] レーダー・システム40は、天気および地形の主に外部の環境から送信されたパルス散乱に起因する信号を受信する。受け取られた信号は、プロセッサ42に通され、それは、コンピュータ・メモリ(三次元3Dバッファ)に含まれる地面正規化レーダー断面および天気反射の評価を更新するために受け取られる信号を用いる。プロセッサ42は、ユーザ・インタフェース48から送られるいかなる制御信号に基づいて、または、プロセッサ42の範囲内の設定に基づいて表示装置44上の表示のためのイメージを生成する。
【0013】
[0014] システムのスタートアップで、気圧(すなわち、3Dバッファ)の全てのエレメントおよび地面(すなわち2Dバッファ)の全てのエレメントは、初期化される。各々のエレメント(すなわちバッファのセル)の初期化は、(1)(天気に関する)反射、または、(地面に関する)正規化されたレーダー断面(NRCS)、および、(2) を交差させる)天気および地面の双方に関するセルのための各々の初期値に伴う不確実性パラメータに関する値を選択することを含む。不確実性は、最初の反射またはNRCS値がどれくらい誤っているか処理を表す。
【0014】
[0015] 地面エレメントに関して、最初のNRCSおよび/または不確実性パラメータは、表層のタイプ(すなわち、水、森林、都市、その他)、地形シャドウイング、レーダーから地面エレメントに対する入射角度、または、反射を変える他の要因に関する演繹的な情報を使用することができる。天気反射に関して、演繹的な情報は、他のレーダーからのアップリンクされた天気反射、および、それらのエレメントのための下方の不確実性を反映する対応する不確実性パラメータであってよい。
【0015】
[0016] ある実施形態では、本発明は、NRCSが表層のタイプに関連する期待に基づいて地面エレメントの不確実性パラメータを修正することを提供する。例えば、水は低いNRCS値を有すると期待されるので、我々が、水-タイプ・地面エレメントをNRCS = 0に初期化する場合、最初のNRCSが誤ってあまりに多くはならないので、対応する不確実性は低い値に初期化される。他の実施形態では、いかなる演繹的な情報も、エレメント値およびその不確実性パラメータの双方を初期化するために用いられるが、地面エレメントのためでない。
【0016】
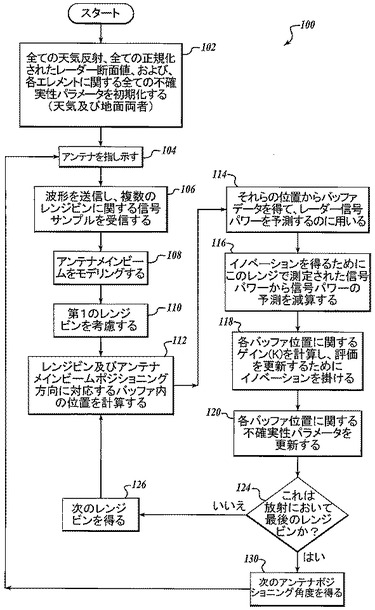
[0017] 図2は、反射値を三次元表示バッファに格納する例示の方法100を図示する。第一に、ブロック102で、三次元バッファ場所と関連する不確実性パラメータおよび反射値は、開始値まで初期化される。例えば、反射値におけるできる限り大きい最初のエラーを示すために、比較的大きな値まで初期化される不確実性パラメータで、反射値は、ゼロまで初期化されることができる。反射値が、地上に置かれたレーダーから天気反射をアップリンクしたような追加的な情報を使用して初期化される場合、対応する不確実性パラメータは、これらの最初の反射の減少する不確実性を示すためにより低い値まで初期化されるだろう。地面エレメントに関して正規化されたレーダー断面の不確実性パラメータは、各々のエレメントと関連する地面のタイプに基づいて初期化されることができる。ブロック104で、アンテナのメインビームは、特定の半径方向において示される。次いで、ブロック106では、レーダー・システムは、アンテナを超えて波形を送信して、送信された波形に基づいて複数のレンジビン(range bins)に関する信号サンプルを受信する。ブロック108で、アンテナメインビームは、ベクトルの2次元のアレイによってモデリングされる。各々のベクトルは、アンテナメインビームの範囲内で立体角の増加を表す。各々のベクトルは、関連するアンテナゲイン値を有する。
【0017】
[0018] 次いで、ブロック110で、受信信号の第1のレンジビンは、考慮される。第1のレンジビンの考慮の一部として、ブロック112で、プロセッサ42は、レンジビンと対応する三次元バッファの中で場所を算出し、ベクトルのアレイによって表される方向増加を示しているアンテナは、アンテナメインビームをモデリングするのに用いられる。次いで、ブロック104で、プロセッサ42は、三次元バッファの算出位置に格納されるデータを検索し、レーダー信号パワーを予測するために検索されたデータを使用する。ブロック116で、プロセッサ42は、レンジビンで測定された信号パワーから信号パワー予測を減じ、それによってイノベーション値を生成する。ブロック118で、プロセッサ42は、各々の算出バッファ場所に関するゲイン(k)を算出し、各々の場所に関する散乱パラメータ(天気反射または地面NRCS)の最新版を提供するために算出ゲイン値をイノベーションに掛ける。次で、ブロック120で、プロセッサ42は、各々のバッファ場所の不確実性パラメータを更新する。決定ブロック124で、現在のレンジビンが、現在の放射の最後のレンジビンでない場合、プロセス100は、受け取られる信号の次のレンジビンに続く。一旦、次のレンジビン値が検索されると、最後のレンジビン値に達するまで、プロセスはブロック112に続く。最後のレンジビン値に達するとき、決定ブロック124で決定されたように、システムは、次のアンテナ指示角度を得て(ブロック130参照)、アンテナが、検索された次のアンテナ指示角度に差し向けられるブロック104にプロセスを戻す。
【0018】
[0019] 以下では、実施形態による方法100を更に記載する。三次元記憶場所にストアするために反射値を決定するための零時の方程式は、次の通りである:
【0019】
【数1】

【0020】
[0020] 第一に、残余の信号は、残余の信号またはイノベーションを得るために測定Smeasおよび予測
【0021】
【数2】
【0022】
の間の相違をとることによって決定され、
【0023】
【数3】
【0024】
は、測定前のi番目の格子位置のための反射評価であり、
【0025】
【数4】
【0026】
は、測定後の反射評価であり、Kiは、レーダー信号を反射値に変換するためのフィルタゲインであり、Smeasは測定されたレーダー信号である。hは、レーダービーム形状と、レーダービーム形状に関連する記憶場所の位置に依存するエレメント重量(element weight)である。hの判定は、更に詳細に下で記載される。グランドNRCS値を更新するための対応する方程式は、
【0027】
【数5】
【0028】
である。
[0021] フィルタゲインKiは、式(8)に示される。
【0029】
【数6】
【0030】
[0022] 分子の合計は、測定に貢献する地面NRCSエレメントと天気反射エレメントとを両方含む。
[0023] Piが、(天気または地面から)i番目の反射エレメントの不確実性パラメータであり、
【0031】
【数7】
【0032】
は、推定の付加的な無秩序雑音の相違であり、合計は、現在の測定を使用してアップデートされる全ての反射エレメントのものである。i番目の反射エレメントが地面エレメントであるとき、Piは、各々のエレメントと関連する地面のタイプに基づいて初期化される地面エレメントに関するNRCSの不確実性パラメータである。換言すれば、初期化された不確実性パラメータは、地面エレメントがレーダーパワーを反映する方法の確実性に基づく。例えば、地面エレメントが水(例えば湖、海、その他)と関係している場合、この地面エレメントが少しのまたは反射効果を提供しない確率が高い。
【0033】
[0024] 不確実性値は、本質的に見積値におけるエラーの分散である。スタートアップで、NRCS値の初期化が起こる時、表面のタイプが公知の場合、この知識は我々が境界をNRCSのための初期値における予想されるエラーに配置することができる。例えば、表層が水であることが公知の場合、正確なNRCS値は、小さいと思われ、正確な値とゼロ(すなわちスターティング評価エラー)の開始値との間の差は少ないので、NRCS値は、ゼロに初期化され、不確実性パラメータは非常に小さくされる。他方、エレメントが都市である場合、正確なNRCS値は、広範囲にわたる値を有すると期待され、非常に大きな値を含む。したがって、ゼロのスターティング評価の不確実性(すなわち分散)は、大きくなければならない。
【0034】
[0025] 反射エレメント値を更新することに加え、測定値は評価の不確実性を減らす。同じモデルを使用して、Pの変化は、式(9)の例によって示される:
【0035】
【数8】
【0036】
ここで、Piは測定の前の不確実性パラメータであり、
【0037】
【数9】
【0038】
は、測定の後の不確実性パラメータである。
[0026] フィルタゲインKおよびパラメータPに関する別の方程式は、次の通りである:
【0039】
【数10】
【0040】
および
【0041】
【数11】
【0042】
[0027] 当業者は、経験的に一定の因子kkおよびkpを決定する。レーダー測定値を使用している三次元記憶場所の反射価値を更新することは、対応する重量(h)と対応する不確実性パラメータ(P)との間の相互作用を含む。hのより大きな値は、アンテナメインビームの軸の近くの場所と対応する。式(10)から分かるように、不確実性パラメータが記憶場所に関して同一の場合、hのより大きな値を有する記憶場所は最新版の最も大きな大きさを受信する傾向がある。同様に、hが記憶場所に関して同一の場合、最も高い相対的な不確実性を有する記憶場所は、最も大きな最新版を受信するだろう。
【0043】
[0028] 反射エレメント(記憶場所)のアレイを介したアンテナ・ビームスキャニングでは、光線軸の近くのエレメントは、比較的大きい最新版および不確実性の比較的大きい減少を得る。光線がそれらのエレメントから離れて走査されるにつれて、それらのエレメントはまだある程度の最新版を受信する。しかし、それらの最初の評価がより多くの不確実性を有するので、類似したh値を有する光線の他の側のエレメントは、より大きな最新版を受信する。不確実性パラメータは、アンテナ・ビームが反射フィールドバッファ(三次元バッファ)内に有される分類の記録を提供する。
【0044】
[0029] レーダー・アンテナが、レンジの関数として、後方散乱された信号の測定を得るように特定の命令で示される場合、この測定値の平均値は、レーダー方程式によって記載される。天気散乱だけを考慮すると、ある実施形態では、レーダー方程式は次の通りである:
【0045】
【数12】
【0046】
ここで、
【0047】
【数13】
【0048】
は、信号パワーであり、Kは、送信パワー、損失などの影響を包含する定数であり、Wr(r)は、受信された信号パワーの時間に関して適当なレンジの重み関数であり、G(Ω)は、方向Ωの関数としてのアンテナゲインであり、Z(r,Ω)は反射分布である。
【0049】
[0030] ある実施形態では、受信されたパワーは、
【0050】
【数14】
【0051】
によって近似される:
ここで、δrは、レンジの増加であり、δΩは立体角の増加である。レンジ重み関数およびアンテナゲイン関数は、空間座標(r,Ω)の離散的なポイントで評価される。単純化のために、レンジ重み関数Wrは、範囲δrのレンジインターバルにわたって、ざっと一定であるとして近似される。このように、上記の近似値は生じる:
【0052】
【数15】
【0053】
[0031] iにわたる合計は、角度スペース(スペースにインクリメント命令を表している合計の各期間)のアンテナメインビームにわたる統合に近い。反射フィールドのバイアス関数展開を使用して、上の合計は、合計のグループに分けられ、バイアス関数の特定の実現にわたってなされる。バイアス関数が、(ボクセルと称され、反射がボクセルの範囲内の定数とみなされる)非制限の例のちょうど矩形のプリズムである場合、各々のグループのボクセルへの合計のための単一の重みが決定される。他のバイアス関数が、使われることができる。この場合、hkのものは次の通りである:
【0054】
【数16】
【0055】
[0032] 特定のボクセルに入るインクリメントメインビームだけを通じて、合計は実行される。
[0033] 天気散乱から地面散乱の分離は、天気反射フィールド評価で同時に地面NRCSの配布を推定することによって達成されることができる。したがって、地面レーダー・マップは、天気反射フィールドを推定することの一部として生成される。
【0056】
[0034] 地面NRCSの評価のためのプロセスは、天気反射評価のためのプロセスと類似している。地面後方散乱からの受信パワーは、
【0057】
【数17】
【0058】
によって近似される:
【0059】
【数18】
【0060】
は、範囲rおよびアジマス角度
【0061】
【数19】
【0062】
での地面のNRCSである。アンテナゲインは、このレンジおよびアジマス角度での地面の方向に評価される。地形立面図は、すでに公知である。定数Kは、数値的な統合において使用されるインクリメントおよびレーダー設計パラメータを含む。バイアス関数のセットに関してNRCS配布を拡大することによって、式10は以下の式に代入される:
【0063】
【数20】
【0064】
[0035] 天気および地面散乱パワーを推定することにより、2つのコンポーネントは、分離可能である。アンテナポインティング角度(特に傾斜)の変化を有する地面散乱信号の変化が、予測可能な方法で変化するので、分離はなされる。多様なアンテナポインティング角度で予測された測定値と測定値の多くの比較をすることによって、プロセスは、天気と地面の散乱特性を分離する解に反復して達する。例示の走査戦略は、低いチルト角度で始まることになっており、高いチルト角度の方へ進む。この例では、地面散乱の良い評価は達成され、天気散乱(より低いチルト角度)によって、汚染されない。これらの地上散乱評価は、次いで、次のレーダー測定値に地面散乱の相対的な貢献を予測するのに用いることができ、それによって、これらの測定値のどんな部分が天気散乱のものであると考えられることができるかについて明らかにする。
【0065】
[0036] 本発明の好ましい実施形態を例示して、上述したように、記載してきたけれども、多くの変更が本発明の精神と範囲から逸脱することなくなされることができる。例えば、演繹的な情報は、見積り値、および、天気反射および地面NRCSの関連する不確実性パラメータの両方を初期化するのに用いられる。
【0066】
[0037] 本発明の実施形態は、以下の特許請求の範囲により特定される。
【技術分野】
【0001】
[0001] 航空機レーダー・システムから受信されたレーダー信号を得て、それを反射値に変換して、レーダー信号と関連するレンジに関して、それを三次元(3D)天気バッファの場所に格納する試みが実行された。三次元天気バッファは、三次元スペースの中で天気反射の分布を記載するデータを含むコンピュータ・メモリのアレイである。他の試みにおいて、レーダーリターン信号パワーは、特定の仮定に基づく反射に変換され、3D天気バッファのエレメントを配置するのに用いられる。
【0002】
[0002] 以前の試みに関する課題は、所望の気象信号の混乱汚染が発生するというその根拠である。基本の混乱汚染を予防する前の試みは、地面の想定した場所の近位にアンテナ光線の計算を用いており、地面信号散乱プロパティは、信号汚染の程度を決定するために、次いで、それが汚染されるとみなされる場合、信号を抑制するために用いられる。
【0003】
[0003] したがって、より正確に天気情報を識別する必要が存在し、天気レーダー信号から地面混乱汚染を取り除き、または、天気レーダー信号の地面を識別する。
【背景技術】
【0004】
[0004] 米国特許第6,707,415号(それは本願明細書にリファレンスとして組み入れられたものとする)は、地面信号リターンによって比較的汚されていない天気反射を表示する目的のために天気および地面反射を推定し、または、天気によって最小限に汚染される地面反射を推定するためにレーダーを使用する方法を記載する。方法は相対的な不確実性を天気反射の現在の評価において代表するパラメータを利用し、地面は全てのモデリング場所に関してレーダー断面を正規化した。これらのパラメータは、(見積値の不確実性を減らす)新規な測定に応答して更新されることができるかまたは更新されることができない。しかし、いずれにせよ、天気および地面反射の不確実性パラメータのためのスターティング値は、選択されなければならない。
【0005】
[0005] いかなる評価プロセスに関しても、天気および地面反射の別々の評価は、完全でない。時々、若干の気象信号は、増加する推定された地面反射およびその逆も同じ結果となる。
【発明の概要】
【課題を解決するための手段】
【0006】
[0006] 本発明は、三次元バッファに天気レーダー反射データを格納するための方法、システムおよびコンピュータプログラム製品である。方法は、レーダー/航空機を囲んでいる空間のレーダー信号散乱プロパティをモデリングすることを含む。現在のレーダー測定値は、測定プロセスのモデルを使用して測定値の予測と比較される。現在のレーダー測定値と測定値の予測との相違が、格納された反射値を調整するのに用いられる。
【0007】
[0007] 地面の表面の正規化されたレーダー断面(NRCS)の分布は、天気反射評価と類似した方法で推定される。地面に関して、バッファは、三次元天気を記載する3次元よりむしろ、地面の表面を記載するために2次元でNRCS分布を表す。機上レーダーのアプリケーションのうちの1つが、レーダー地面地図を提供することになっているので、本発明は、プロセスの固有の一部として地面地図を提供する。
【0008】
[0008] 前述の概要から直ちに認められるように、本発明は、天気反射配布および地面NRCS配布を別々に推定するためにレーダー信号パワー測定を使用することにより、三次元バッファに記憶するためのより正確な情報を提供する。プロセスは、天気反射および地面NRCSの分布の以前に格納された推定に従って行動している測定プロセスのモデルによって生成される予想される測定値とレーダー測定値との間の相違を用いて分布の評価を反復的に更新することによって実行される。
【0009】
[0009] 本発明の好適な他の実施形態は、以下の図面に関して以下に詳細に記載される。
【図面の簡単な説明】
【0010】
【図1】[0010] 図1は、本発明を実行するシステムのブロック図である;
【図2】[0011] 図2は、図1に示されるシステムによって実行されるフローチャート図を例示する。
【発明を実施するための形態】
【0011】
[0012] 本発明は、システム、方法および、三次元レーダーリターンデータを格納するためのコンピュータプログラム製品である。図1は、本発明によって形成される例示のシステム30を例示する。システム30は、気象レーダー・システム40、プロセッサ42、メモリ43、表示装置44、慣性航法装置(INS)46、および、プロセッサ42に連結したユーザ・インタフェース48を含む。表示プロセッサ42は、レーダー・システム40、表示装置44、INS 46およびメモリ43に電気的に結合される。例示のレーダー・システム40は、レーダー・コントローラ50、送信機52、レシーバ54およびアンテナ56を含む。レーダー・コントローラ50は、INS 46または他の航空機システムから受け取られる航空機データ(すなわち、位置、方向、ロール、ヨー、ピッチ、その他)に基づいてアンテナ56を介して信号を送受信することを実行するための送信機52およびレシーバ54を制御する。
【0012】
[0013] レーダー・システム40は、天気および地形の主に外部の環境から送信されたパルス散乱に起因する信号を受信する。受け取られた信号は、プロセッサ42に通され、それは、コンピュータ・メモリ(三次元3Dバッファ)に含まれる地面正規化レーダー断面および天気反射の評価を更新するために受け取られる信号を用いる。プロセッサ42は、ユーザ・インタフェース48から送られるいかなる制御信号に基づいて、または、プロセッサ42の範囲内の設定に基づいて表示装置44上の表示のためのイメージを生成する。
【0013】
[0014] システムのスタートアップで、気圧(すなわち、3Dバッファ)の全てのエレメントおよび地面(すなわち2Dバッファ)の全てのエレメントは、初期化される。各々のエレメント(すなわちバッファのセル)の初期化は、(1)(天気に関する)反射、または、(地面に関する)正規化されたレーダー断面(NRCS)、および、(2) を交差させる)天気および地面の双方に関するセルのための各々の初期値に伴う不確実性パラメータに関する値を選択することを含む。不確実性は、最初の反射またはNRCS値がどれくらい誤っているか処理を表す。
【0014】
[0015] 地面エレメントに関して、最初のNRCSおよび/または不確実性パラメータは、表層のタイプ(すなわち、水、森林、都市、その他)、地形シャドウイング、レーダーから地面エレメントに対する入射角度、または、反射を変える他の要因に関する演繹的な情報を使用することができる。天気反射に関して、演繹的な情報は、他のレーダーからのアップリンクされた天気反射、および、それらのエレメントのための下方の不確実性を反映する対応する不確実性パラメータであってよい。
【0015】
[0016] ある実施形態では、本発明は、NRCSが表層のタイプに関連する期待に基づいて地面エレメントの不確実性パラメータを修正することを提供する。例えば、水は低いNRCS値を有すると期待されるので、我々が、水-タイプ・地面エレメントをNRCS = 0に初期化する場合、最初のNRCSが誤ってあまりに多くはならないので、対応する不確実性は低い値に初期化される。他の実施形態では、いかなる演繹的な情報も、エレメント値およびその不確実性パラメータの双方を初期化するために用いられるが、地面エレメントのためでない。
【0016】
[0017] 図2は、反射値を三次元表示バッファに格納する例示の方法100を図示する。第一に、ブロック102で、三次元バッファ場所と関連する不確実性パラメータおよび反射値は、開始値まで初期化される。例えば、反射値におけるできる限り大きい最初のエラーを示すために、比較的大きな値まで初期化される不確実性パラメータで、反射値は、ゼロまで初期化されることができる。反射値が、地上に置かれたレーダーから天気反射をアップリンクしたような追加的な情報を使用して初期化される場合、対応する不確実性パラメータは、これらの最初の反射の減少する不確実性を示すためにより低い値まで初期化されるだろう。地面エレメントに関して正規化されたレーダー断面の不確実性パラメータは、各々のエレメントと関連する地面のタイプに基づいて初期化されることができる。ブロック104で、アンテナのメインビームは、特定の半径方向において示される。次いで、ブロック106では、レーダー・システムは、アンテナを超えて波形を送信して、送信された波形に基づいて複数のレンジビン(range bins)に関する信号サンプルを受信する。ブロック108で、アンテナメインビームは、ベクトルの2次元のアレイによってモデリングされる。各々のベクトルは、アンテナメインビームの範囲内で立体角の増加を表す。各々のベクトルは、関連するアンテナゲイン値を有する。
【0017】
[0018] 次いで、ブロック110で、受信信号の第1のレンジビンは、考慮される。第1のレンジビンの考慮の一部として、ブロック112で、プロセッサ42は、レンジビンと対応する三次元バッファの中で場所を算出し、ベクトルのアレイによって表される方向増加を示しているアンテナは、アンテナメインビームをモデリングするのに用いられる。次いで、ブロック104で、プロセッサ42は、三次元バッファの算出位置に格納されるデータを検索し、レーダー信号パワーを予測するために検索されたデータを使用する。ブロック116で、プロセッサ42は、レンジビンで測定された信号パワーから信号パワー予測を減じ、それによってイノベーション値を生成する。ブロック118で、プロセッサ42は、各々の算出バッファ場所に関するゲイン(k)を算出し、各々の場所に関する散乱パラメータ(天気反射または地面NRCS)の最新版を提供するために算出ゲイン値をイノベーションに掛ける。次で、ブロック120で、プロセッサ42は、各々のバッファ場所の不確実性パラメータを更新する。決定ブロック124で、現在のレンジビンが、現在の放射の最後のレンジビンでない場合、プロセス100は、受け取られる信号の次のレンジビンに続く。一旦、次のレンジビン値が検索されると、最後のレンジビン値に達するまで、プロセスはブロック112に続く。最後のレンジビン値に達するとき、決定ブロック124で決定されたように、システムは、次のアンテナ指示角度を得て(ブロック130参照)、アンテナが、検索された次のアンテナ指示角度に差し向けられるブロック104にプロセスを戻す。
【0018】
[0019] 以下では、実施形態による方法100を更に記載する。三次元記憶場所にストアするために反射値を決定するための零時の方程式は、次の通りである:
【0019】
【数1】
【0020】
[0020] 第一に、残余の信号は、残余の信号またはイノベーションを得るために測定Smeasおよび予測
【0021】
【数2】
【0022】
の間の相違をとることによって決定され、
【0023】
【数3】
【0024】
は、測定前のi番目の格子位置のための反射評価であり、
【0025】
【数4】
【0026】
は、測定後の反射評価であり、Kiは、レーダー信号を反射値に変換するためのフィルタゲインであり、Smeasは測定されたレーダー信号である。hは、レーダービーム形状と、レーダービーム形状に関連する記憶場所の位置に依存するエレメント重量(element weight)である。hの判定は、更に詳細に下で記載される。グランドNRCS値を更新するための対応する方程式は、
【0027】
【数5】
【0028】
である。
[0021] フィルタゲインKiは、式(8)に示される。
【0029】
【数6】
【0030】
[0022] 分子の合計は、測定に貢献する地面NRCSエレメントと天気反射エレメントとを両方含む。
[0023] Piが、(天気または地面から)i番目の反射エレメントの不確実性パラメータであり、
【0031】
【数7】
【0032】
は、推定の付加的な無秩序雑音の相違であり、合計は、現在の測定を使用してアップデートされる全ての反射エレメントのものである。i番目の反射エレメントが地面エレメントであるとき、Piは、各々のエレメントと関連する地面のタイプに基づいて初期化される地面エレメントに関するNRCSの不確実性パラメータである。換言すれば、初期化された不確実性パラメータは、地面エレメントがレーダーパワーを反映する方法の確実性に基づく。例えば、地面エレメントが水(例えば湖、海、その他)と関係している場合、この地面エレメントが少しのまたは反射効果を提供しない確率が高い。
【0033】
[0024] 不確実性値は、本質的に見積値におけるエラーの分散である。スタートアップで、NRCS値の初期化が起こる時、表面のタイプが公知の場合、この知識は我々が境界をNRCSのための初期値における予想されるエラーに配置することができる。例えば、表層が水であることが公知の場合、正確なNRCS値は、小さいと思われ、正確な値とゼロ(すなわちスターティング評価エラー)の開始値との間の差は少ないので、NRCS値は、ゼロに初期化され、不確実性パラメータは非常に小さくされる。他方、エレメントが都市である場合、正確なNRCS値は、広範囲にわたる値を有すると期待され、非常に大きな値を含む。したがって、ゼロのスターティング評価の不確実性(すなわち分散)は、大きくなければならない。
【0034】
[0025] 反射エレメント値を更新することに加え、測定値は評価の不確実性を減らす。同じモデルを使用して、Pの変化は、式(9)の例によって示される:
【0035】
【数8】
【0036】
ここで、Piは測定の前の不確実性パラメータであり、
【0037】
【数9】
【0038】
は、測定の後の不確実性パラメータである。
[0026] フィルタゲインKおよびパラメータPに関する別の方程式は、次の通りである:
【0039】
【数10】
【0040】
および
【0041】
【数11】
【0042】
[0027] 当業者は、経験的に一定の因子kkおよびkpを決定する。レーダー測定値を使用している三次元記憶場所の反射価値を更新することは、対応する重量(h)と対応する不確実性パラメータ(P)との間の相互作用を含む。hのより大きな値は、アンテナメインビームの軸の近くの場所と対応する。式(10)から分かるように、不確実性パラメータが記憶場所に関して同一の場合、hのより大きな値を有する記憶場所は最新版の最も大きな大きさを受信する傾向がある。同様に、hが記憶場所に関して同一の場合、最も高い相対的な不確実性を有する記憶場所は、最も大きな最新版を受信するだろう。
【0043】
[0028] 反射エレメント(記憶場所)のアレイを介したアンテナ・ビームスキャニングでは、光線軸の近くのエレメントは、比較的大きい最新版および不確実性の比較的大きい減少を得る。光線がそれらのエレメントから離れて走査されるにつれて、それらのエレメントはまだある程度の最新版を受信する。しかし、それらの最初の評価がより多くの不確実性を有するので、類似したh値を有する光線の他の側のエレメントは、より大きな最新版を受信する。不確実性パラメータは、アンテナ・ビームが反射フィールドバッファ(三次元バッファ)内に有される分類の記録を提供する。
【0044】
[0029] レーダー・アンテナが、レンジの関数として、後方散乱された信号の測定を得るように特定の命令で示される場合、この測定値の平均値は、レーダー方程式によって記載される。天気散乱だけを考慮すると、ある実施形態では、レーダー方程式は次の通りである:
【0045】
【数12】
【0046】
ここで、
【0047】
【数13】
【0048】
は、信号パワーであり、Kは、送信パワー、損失などの影響を包含する定数であり、Wr(r)は、受信された信号パワーの時間に関して適当なレンジの重み関数であり、G(Ω)は、方向Ωの関数としてのアンテナゲインであり、Z(r,Ω)は反射分布である。
【0049】
[0030] ある実施形態では、受信されたパワーは、
【0050】
【数14】
【0051】
によって近似される:
ここで、δrは、レンジの増加であり、δΩは立体角の増加である。レンジ重み関数およびアンテナゲイン関数は、空間座標(r,Ω)の離散的なポイントで評価される。単純化のために、レンジ重み関数Wrは、範囲δrのレンジインターバルにわたって、ざっと一定であるとして近似される。このように、上記の近似値は生じる:
【0052】
【数15】
【0053】
[0031] iにわたる合計は、角度スペース(スペースにインクリメント命令を表している合計の各期間)のアンテナメインビームにわたる統合に近い。反射フィールドのバイアス関数展開を使用して、上の合計は、合計のグループに分けられ、バイアス関数の特定の実現にわたってなされる。バイアス関数が、(ボクセルと称され、反射がボクセルの範囲内の定数とみなされる)非制限の例のちょうど矩形のプリズムである場合、各々のグループのボクセルへの合計のための単一の重みが決定される。他のバイアス関数が、使われることができる。この場合、hkのものは次の通りである:
【0054】
【数16】
【0055】
[0032] 特定のボクセルに入るインクリメントメインビームだけを通じて、合計は実行される。
[0033] 天気散乱から地面散乱の分離は、天気反射フィールド評価で同時に地面NRCSの配布を推定することによって達成されることができる。したがって、地面レーダー・マップは、天気反射フィールドを推定することの一部として生成される。
【0056】
[0034] 地面NRCSの評価のためのプロセスは、天気反射評価のためのプロセスと類似している。地面後方散乱からの受信パワーは、
【0057】
【数17】
【0058】
によって近似される:
【0059】
【数18】
【0060】
は、範囲rおよびアジマス角度
【0061】
【数19】
【0062】
での地面のNRCSである。アンテナゲインは、このレンジおよびアジマス角度での地面の方向に評価される。地形立面図は、すでに公知である。定数Kは、数値的な統合において使用されるインクリメントおよびレーダー設計パラメータを含む。バイアス関数のセットに関してNRCS配布を拡大することによって、式10は以下の式に代入される:
【0063】
【数20】
【0064】
[0035] 天気および地面散乱パワーを推定することにより、2つのコンポーネントは、分離可能である。アンテナポインティング角度(特に傾斜)の変化を有する地面散乱信号の変化が、予測可能な方法で変化するので、分離はなされる。多様なアンテナポインティング角度で予測された測定値と測定値の多くの比較をすることによって、プロセスは、天気と地面の散乱特性を分離する解に反復して達する。例示の走査戦略は、低いチルト角度で始まることになっており、高いチルト角度の方へ進む。この例では、地面散乱の良い評価は達成され、天気散乱(より低いチルト角度)によって、汚染されない。これらの地上散乱評価は、次いで、次のレーダー測定値に地面散乱の相対的な貢献を予測するのに用いることができ、それによって、これらの測定値のどんな部分が天気散乱のものであると考えられることができるかについて明らかにする。
【0065】
[0036] 本発明の好ましい実施形態を例示して、上述したように、記載してきたけれども、多くの変更が本発明の精神と範囲から逸脱することなくなされることができる。例えば、演繹的な情報は、見積り値、および、天気反射および地面NRCSの関連する不確実性パラメータの両方を初期化するのに用いられる。
【0066】
[0037] 本発明の実施形態は、以下の特許請求の範囲により特定される。
【特許請求の範囲】
【請求項1】
航空機のレーダーシステム(30)によって実行される方法であって、
各々のエレメントに関連する地上のタイプに基づいた地上エレメントに関する正規化されたレーダー断面の不確実性パラメータを初期化するステップと、
天気エレメントに関する反射の不確実性パラメータを初期化するステップと、
送信されたレーダービームから戻ったレーダーの結果として、レーダーシステムからのレーダー測定値を受信するステップと、
空間の現在の反射率分布に基づいたレーダー測定の予測と、レーダーシステムが測定値を受信する方法と、反射率分布の不確実性パラメータと、地面エレメントの正規化された断面の初期化された不確実性パラメータとを生成するステップと、
受信されたレーダー測定値からレーダー測定の生成された予測を減算するステップと、
前記減算の結果に基づいて1以上の反射値を調整するステップと、
前記1以上の調整された反射値をストアするステップと、
を有し、
前記ストアされた反射値が、レーダーシステムの周りの環境の一部を表し、
前記予測を生成するステップが、アンテナビーム放射パターンおよびレーダーレンジ重み関数に更に基づいており、
前記反射値を調整するステップが、以前にストアされた反射値を更新するステップを含み、
前記天気エレメントに関する反射の不確実性パラメータを初期化するステップが、演繹的な情報に基づいて天気の不確実性パラメータを初期化することを含み、
前記演繹的な情報がアップリンクされた天気データからなることを特徴とする方法。
【請求項2】
レーダー信号を送信し、前記送信されたレーダー信号のレーダーリターンの結果としてレーダー測定値を生成するためのレーダーシステム(40)と、
メモリ(43)と、
前記レーダーシステムおよび前記メモリに結合するプロセッサ(42)と、
を有し、
前記プロセッサが、
各エレメントに関連した地面のタイプに基づいて地面エレメントに関して正規化されたレーダー断面の不確実性パラメータを初期化し、天気エレメントに関する反射の不確実性パラメータを初期化するように構成された第1のコンポーネントと、
空間の現在の反射率分布に基づいたレーダー測定の予測と、レーダーが測定値を受信する方法と、反射率分布の不確実性パラメータと、地面エレメントの正規化された断面の初期化された不確実性パラメータとを生成するように構成された第2のコンポーネントと、
受信されたレーダー測定値からレーダー測定の生成された予測を減算するように構成された第3のコンポーネントと、
前記減算の結果に基づいて1以上の反射値を調整するように構成された第4のコンポーネントと、
前記1以上の調整された反射値をストアするように構成された第5のコンポーネントと、を有し、
前記ストアされた反射値が、前記レーダーシステムの周りの環境の一部を表すことを特徴とするシステム。
【請求項3】
前記第4のコンポーネントが、反射分布の不確実性に基づいて調整し、アンテナビーム放射パターンおよびレーダーレンジ重み関数を生成し、以前にストアされた反射値を更新することを特徴とし、
前記プロセッサが、グランドの正規化されたレーダー断面の評価を生成するように構成された第6のコンポーネントを更に有し、
前記天気エレメントに関する反射の不確実性パラメータを初期化することが、演繹的な情報に基づいて天気の不確実性パラメータを初期化することを含み、
前記演繹的な情報がアップリンクされた天気データからなることを特徴とする請求項2に記載のシステム。
【請求項1】
航空機のレーダーシステム(30)によって実行される方法であって、
各々のエレメントに関連する地上のタイプに基づいた地上エレメントに関する正規化されたレーダー断面の不確実性パラメータを初期化するステップと、
天気エレメントに関する反射の不確実性パラメータを初期化するステップと、
送信されたレーダービームから戻ったレーダーの結果として、レーダーシステムからのレーダー測定値を受信するステップと、
空間の現在の反射率分布に基づいたレーダー測定の予測と、レーダーシステムが測定値を受信する方法と、反射率分布の不確実性パラメータと、地面エレメントの正規化された断面の初期化された不確実性パラメータとを生成するステップと、
受信されたレーダー測定値からレーダー測定の生成された予測を減算するステップと、
前記減算の結果に基づいて1以上の反射値を調整するステップと、
前記1以上の調整された反射値をストアするステップと、
を有し、
前記ストアされた反射値が、レーダーシステムの周りの環境の一部を表し、
前記予測を生成するステップが、アンテナビーム放射パターンおよびレーダーレンジ重み関数に更に基づいており、
前記反射値を調整するステップが、以前にストアされた反射値を更新するステップを含み、
前記天気エレメントに関する反射の不確実性パラメータを初期化するステップが、演繹的な情報に基づいて天気の不確実性パラメータを初期化することを含み、
前記演繹的な情報がアップリンクされた天気データからなることを特徴とする方法。
【請求項2】
レーダー信号を送信し、前記送信されたレーダー信号のレーダーリターンの結果としてレーダー測定値を生成するためのレーダーシステム(40)と、
メモリ(43)と、
前記レーダーシステムおよび前記メモリに結合するプロセッサ(42)と、
を有し、
前記プロセッサが、
各エレメントに関連した地面のタイプに基づいて地面エレメントに関して正規化されたレーダー断面の不確実性パラメータを初期化し、天気エレメントに関する反射の不確実性パラメータを初期化するように構成された第1のコンポーネントと、
空間の現在の反射率分布に基づいたレーダー測定の予測と、レーダーが測定値を受信する方法と、反射率分布の不確実性パラメータと、地面エレメントの正規化された断面の初期化された不確実性パラメータとを生成するように構成された第2のコンポーネントと、
受信されたレーダー測定値からレーダー測定の生成された予測を減算するように構成された第3のコンポーネントと、
前記減算の結果に基づいて1以上の反射値を調整するように構成された第4のコンポーネントと、
前記1以上の調整された反射値をストアするように構成された第5のコンポーネントと、を有し、
前記ストアされた反射値が、前記レーダーシステムの周りの環境の一部を表すことを特徴とするシステム。
【請求項3】
前記第4のコンポーネントが、反射分布の不確実性に基づいて調整し、アンテナビーム放射パターンおよびレーダーレンジ重み関数を生成し、以前にストアされた反射値を更新することを特徴とし、
前記プロセッサが、グランドの正規化されたレーダー断面の評価を生成するように構成された第6のコンポーネントを更に有し、
前記天気エレメントに関する反射の不確実性パラメータを初期化することが、演繹的な情報に基づいて天気の不確実性パラメータを初期化することを含み、
前記演繹的な情報がアップリンクされた天気データからなることを特徴とする請求項2に記載のシステム。
【図1】

【図2】
【図2】
【公開番号】特開2012−230102(P2012−230102A)
【公開日】平成24年11月22日(2012.11.22)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−84499(P2012−84499)
【出願日】平成24年4月3日(2012.4.3)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
【Fターム(参考)】
【公開日】平成24年11月22日(2012.11.22)
【国際特許分類】
【出願番号】特願2012−84499(P2012−84499)
【出願日】平成24年4月3日(2012.4.3)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
【Fターム(参考)】
[ Back to top ]