
始動時の過速度からターボ機械を保護するシステムの試験方法
過速度保護システムの試験は、
a)ターボ機械を始動させる命令を受信すると、ターボ機械の電子調整システム(ERS)が燃料遮断部材(FCM)の制御回路に燃料遮断部材(FCM)を閉鎖する命令または閉鎖位置に保つ命令を送信するステップと、
b)ERSに送信されFCMの位置を表した情報に基づいて、FCMの閉鎖状態を確認するステップと、
c)ステップb)の確認の結果が肯定結果である場合、ERSがFCMの制御回路にFCMの開放を許可して始動の手順を継続できるようにする命令を送信するステップと、
d)ステップb)の確認の結果が否定結果である場合、ERSが過速度保護システムに関する障害情報を出すステップとを含む。

a)ターボ機械を始動させる命令を受信すると、ターボ機械の電子調整システム(ERS)が燃料遮断部材(FCM)の制御回路に燃料遮断部材(FCM)を閉鎖する命令または閉鎖位置に保つ命令を送信するステップと、
b)ERSに送信されFCMの位置を表した情報に基づいて、FCMの閉鎖状態を確認するステップと、
c)ステップb)の確認の結果が肯定結果である場合、ERSがFCMの制御回路にFCMの開放を許可して始動の手順を継続できるようにする命令を送信するステップと、
d)ステップb)の確認の結果が否定結果である場合、ERSが過速度保護システムに関する障害情報を出すステップとを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ターボ機械を過速度から保護するシステムの試験で、エンジンの始動時に行われる試験に関する。本発明は、航空エンジンおよび工業用タービンに適用できる。
【背景技術】
【0002】
過速度として知られているタービンエンジンの過剰な回転速度は、特に、危険な結果をもたらす可能性があり、特に、タービンロータディスクの破裂と共にエンジンに破壊的影響をもたらす可能性がある。
【0003】
したがって、エンジンは、通常、過速度からエンジンを保護するシステムが取り付けられている。
【0004】
通常、このようなシステムは、エンジンの燃焼室に燃料を供給するための回路内に挿入される遮断弁を含む。過速度は、タービンシャフトの回転速度が限界値または過速度閾値を越えた場合に、電子過速度保護ユニットにより検出される。過速度が検出されると、電子過速度保護ユニットは、遮断弁を閉鎖するコマンド、または電子式、電子油圧式、または油圧式の種々の部品を介して燃料の流れ断面を低減するコマンドを送信する。これらの種々の部品は、遮断弁と共に、過速度保護システムの一部を形成する。
【0005】
エンジンを自動的に始動する手順に、過速度保護システムの試験を組み込むのが知られている。欧州特許出願公開第1036917号明細書を参照することができる。上記特許明細書は、エンジンがスタータによって駆動された時に回転し始めると、速度閾値に試験値が加えられるプロセスを記載している。試験値は、点火速度、すなわち、燃料が燃焼室に噴射される回転速度より実質的に低くなるように選択される。回転速度が試験過速度閾値を越えると、過速度保護システムが適切に動作していることが確認される。適切に動作している場合、点火速度に達すると、過速度閾値は低い試験値から実値に切り替えられる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】欧州特許出願公開第1036917号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
知られている試験プロセスでは、燃料計量ユニットのコアの位置を検出することによって確認が行われるが、燃料計量ユニットのコアの位置は、エンジンの電子調整システムによって制御される油圧装置によって最小位置に移動され、この最小位置で遮断弁を閉鎖する。したがって、遮断弁が閉鎖位置になるのを実際に確認することはない。また、試験後の過速度保護機能が有効であれば、過速度閾値の低い試験値から実値への切り替えが正確に行われていると推定することができる。
【課題を解決するための手段】
【0008】
本発明は、始動時のターボ機械の過速度保護システムで、燃料遮断部材と、過速度の検出に応答して遮断部材を閉鎖させてターボ機械の燃焼室への燃料の供給を遮断または低減するためにターボ機械の電子調整システムに接続された遮断部材の制御回路とを含む保護システムを試験するための簡単で信頼性の高い方法であって、
a)ターボ機械を始動させる命令を受信すると、電子調整システムが遮断部材の制御回路に遮断部材を閉鎖する命令または閉鎖位置に保つ命令を送信するステップと、
b)電子調整が遮断部材の開閉位置を表した受信情報に基づいて遮断部材の閉鎖状態を確認するステップと、
c)ステップb)の確認の結果が肯定結果である場合、電子調整システムが遮断部材の制御回路に遮断部材の開放を許可してターボ機械の始動の手順を継続する命令を送信するステップと、
d)ステップb)の確認の結果が否定結果である場合、電子調整システムが過速度保護システムに関する障害信号を出すステップとの試験シーケンスを含む方法を提供するものである。
【0009】
したがって、過速度保護システムの動作は、ターボ機械の電子調整システムからの命令に応答して、遮断部材が閉鎖位置に達しているかどうかを直接確認することで試験される。また、遮断部材の閉鎖がターボ機械の電子調整ユニットとは異なる電子過速度保護ユニットによって制御される場合、過速度保護システムの試験は、電子過速度保護ユニットではなく、むしろ複雑な機能を管理するのに適したリソースを含む電子調整システムによって管理される。さらに、過速度保護システムの健全状態は、電子調整システムによって最終的に決定され、電子調整システムは、通常、航空機のメンテナンスを管理するシステムと通信する唯一のシステムであるので、このようなメンテナンスを管理するシステムとの共通インタフェースを節約することができる。
【0010】
本発明の方法の特徴によれば、試験シーケンスはさらに、
e)ステップc)の後、遮断部材が開放位置に移行したかどうかを確認するステップと、
f)ステップe)の確認の結果が否定結果である場合、電子調整システムが過速度保護システムに関する障害信号を出すステップとを含む。
【0011】
このことで、手動モードでの始動段階で、過速度保護システムが遮断部材を閉鎖することができること、かつ遮断部材の開放を許可することができることの両方を確認する。
【0012】
本発明の方法の特徴によれば、遮断部材の制御回路が遮断部材を閉鎖するための油圧装置と、閉鎖を制御するために油圧装置に接続される過速度から保護するための電子過速度保護ユニットとを備える場合、遮断部材を閉鎖するまたは遮断部材を閉鎖に保つ命令および遮断部材の開放を許可する命令が、エンジンの電子調整システムと電子過速度保護ユニットとの間の通信バスを介して送信される。
【0013】
遮断部材の位置は、遮断部材の可動要素の位置を検出する位置センサによって提供される信号に基づいて確認される場合もある。
【0014】
ターボ機械を自動モードで始動する際に過速度保護システムを試験する方法の一実施形態では、試験シーケンスは、自動モードのターボ機械の始動の手順に従って遮断部材の開放が必要となる前に終了するように始動シーケンスの中に挿入される。
【0015】
この場合、試験シーケンスは、ステップa)の中に、予め開放している遮断部材を閉鎖する命令を送信するステップを含む場合がある。
【0016】
自動モードで始動する際に、始動プロセスは、過速度保護システムの試験を「透明性のある」方法で始動プロセスに影響を与えずに始動プロセスに組み込むことができるように、所定のシナリオに従う。手動モードで始動する際には同じことは当てはまらない。具体的には、遮断部材が点火のために開放される瞬間を決定するのはパイロットまたは他の操作者であるので、確実に始動プロセスが影響を受けずに、本発明の方法を使用する試験を実行することができないからである。その結果、本発明の第1の実施形態では、試験シーケンスは、手動モードでの始動時には阻止されるのが好ましい。
【0017】
このような状況で、好ましくは、手動モードでの連続始動の回数は電子調整システムによって計数され、電子調整システムは、計数値が所定の閾値を越えると、メンテナンス時に過速度保護システムの試験を要求する情報を出す。これにより、過速度保護システムが試験されずに、非常に多くの回数の始動が行われるのを避ける。
【0018】
ターボ機械を手動モードで始動する際に過速度保護システムを試験する方法の第2の実施形態では、試験シーケンスは、ステップa)の中に、始動命令に応答して遮断部材を閉鎖位置に保つ命令を送信するステップを含む。
【0019】
したがって、本発明により、過速度保護システムの試験を手動モードの始動手順の中に挿入することができる。しかし、手動モードでの始動の命令に従って遮断部材が開く通常の時間を越えても遮断部材を閉鎖に保たなければならないので、本発明の方法は、手動始動の通常の機能に比べて煩わしく、実際の点火の遅れにつながる性質がある。
【0020】
そのため、航空機エンジンの過速度保護システムを試験する時に、電子調整システムは、飛行中の再点火の遅れを避けるために、試験が航空機が地上にある時のみに行われるように設計されるのが好ましい。
【0021】
また、過速度保護システムを試験せずに連続して手動始動する回数が所定の値に達したまたは越えた場合に、第2の実施形態を適用して試験が行われるのが好ましい。
【0022】
したがって、まず、過速度保護システムは手動始動の度に試験されず、手動始動が時折および単発で行われる場合に手動モードの始動への影響を避けることができる。次に、複数回の連続始動が手動モードで行われる場合、すなわち、自動始動が介在しない場合、過速度保護システムが試験されずに非常に多くの回数の始動が行われるのを避ける。
【0023】
試験せずに手動モードで連続始動する回数は、手動モードでの始動または自動モードでの始動に関係なく、試験が行われる度に再初期化されるカウンタによって計数されてもよい。
【0024】
本発明は、限定的でない例として添付図面を参照して考察された以下の説明を読めばよりよく理解されるであろう。
【図面の簡単な説明】
【0025】
【図1】ターボ機械の燃料供給回路の図である。
【図2】本発明の第1の実施形態における自動モードでの始動の場合の試験手順時の過速度保護システムで送受信される信号およびシステムの部品の状態のタイミングチャートである。
【図3】過速度保護システムの試験を管理する方法のフローチャートである。
【図4】本発明の第2の実施形態における手動モードでの始動試験手順時の過速度保護システムによって出されるまたは送信される信号およびシステムの部品の状態のタイミングチャートである。
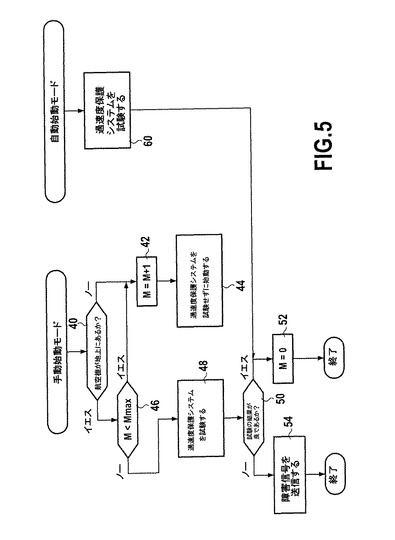
【図5】過速度保護システムの試験を管理する別の方法のフローチャートである。
【発明を実施するための形態】
【0026】
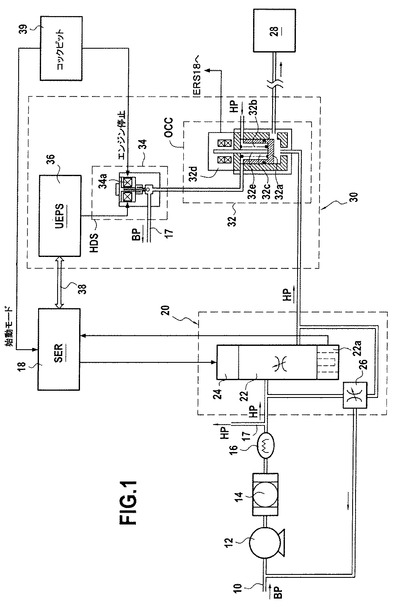
図1は、ターボ機械、例えば、航空機ガスタービンエンジンの燃料供給回路の一例を示す図である。
【0027】
低圧(LP)ポンプ(図示せず)を介して燃料タンクから流入するLP燃料は、LP燃料回路10によって高圧(HP)ポンプ12の入口に送られる。例として、HPポンプ12は、エンジンのタービンシャフトに機械的に接続される補機ギアボックスによって駆動される容積型ポンプである。
【0028】
ポンプ12によって供給されたHP燃料は、フィルタ14と、エンジンの潤滑油と熱交換することによって燃料が加熱される熱交換器16とを通って計量ユニット20に送られる。熱交換器16からの出口におけるHP燃料の一部は、エンジンの種々の油圧式または電気油圧式部品の油圧流体として使用される。
【0029】
例として、計量ユニット20は、サーボ弁24によって制御される可変開放計量弁22を備える。弁26は、計量弁22によって供給される燃料の流れが計量弁を通る流れ断面によって決定されるように、計量弁の燃料入口と出口との一定の圧力差を維持する。流量は、弁22のコアの位置を所望の流れ断面に対応する設定位置にサーボ制御することによって、エンジンの電子調整システム(ERS)18の制御の下でサーボ弁24によって調整される。このために、弁のコアに固定されたロッドに関連付けられた、例えば、線形可変差動変換器(LVDT)式の位置センサ22aによって、弁22のコアの実位置を表す情報がERS18に提供される。計量ユニットへの入口における過剰燃料は、弁26によってLP燃料回路に供給される。
【0030】
計量ユニット20からの出口におけるHP燃料の調整流れは、燃焼遮断部材32を通ってエンジンの燃焼室28の噴射器に送られる。用語「燃料遮断部材」は、本明細書では、エンジンの過速度が検出された場合にERS18の制御の下で完全にまたは部分的に閉鎖された時に、燃焼室に向かう燃料の流れを完全に遮断する、または前記流れを最小値に制限するのに適した部品を指すのに使用されている。
【0031】
図示されている例では、燃料遮断部材(FCM)32は、弁を通る流れ断面を決定する位置のスライド32aを有する弁である。スライド32aは、片側では、スプリング32bの作用を受けてチャンバ32cの圧力を受け、反対側では、計量ユニット20に接続された弁32の入口の圧力を受ける。チャンバ32cは、HP燃料を受け入れる入口ポートと、専用の過速度装置HDS34を介してLP燃料回路10に接続される出口ポートとを有する。この過速度装置は、励磁巻線34aを有する電磁弁の形態である。巻線34aに電力が供給されると、電磁弁34は閉止位置にされてその位置で保持される。次に、スライド32aは、スプリング32bおよびチャンバ32cの圧力を利用して、弁32を閉鎖する位置になる。巻線34aに電力が供給されない時は、電磁弁34は開放され、スライド32aは、燃料の圧力が計量ユニットから弁32に伝わることで開放位置まで移動される。弁32の開閉位置を表す信号は、スライド32aに固定されたロッド32eと協働する、例えば、LVDT式の位置センサ32dによって提供される。この信号は、ERS18に直接送信される。
【0032】
また、弁32は、ERS18によって開放される。
【0033】
過速度装置HDS34は、例えば、ARINCフォーマットの通信バスを介してERS18と通信する電子過速度保護ユニット(EOPU)36によって制御される。ERS18によって出された閉鎖命令に応答して、EOPU36は、過速度装置HDS34を閉鎖位置に保つのに適した巻線34aの励磁信号を生成する。したがって、部品32(位置センサ32dと一体となって)、34、36は、過速度保護システム30を形成する。当然、FCM32および過速度装置HDS34は、弁および電磁弁を使用する以外で実行される場合があり、任意で、過速度装置HDS34は、EOPU36とFCM32との間のシステムに組み込まれた複数の部品で構成される可能性がある。FCM32の閉鎖によるエンジン停止は、コックピットから電磁弁34を開放することで制御することができる。
【0034】
ERS18は、特に、パイロットによって選択される始動モード、つまり自動モードまたは手動モードを表す情報を受信するために航空機のコックピット39に接続される。
【0035】
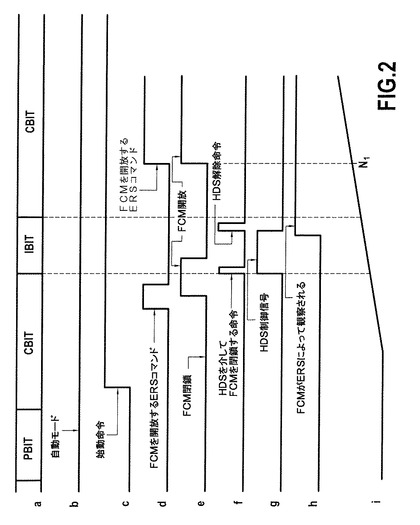
図2を参照しながら、自動モードでエンジンを始動するのに適用できる過速度保護システムを試験する手順の第1の実施形態について以下に説明する。
【0036】
それ自体知られているように、自動モードで始動するプロセスは、ERS18によって開始からエンジン速度(タービンシャフトの回転速度)に応じて順番に管理され、ERS18は連続的に、スタータを運転状態にして、点火装置を作動させ、燃料が噴射される速度を制御するように働く。
【0037】
図2において、
ラインaは、試験手順の連続段階を示し、
ラインbは、エンジンのスタータモジュールの状態を示し、
ラインcは、始動プロセスがパイロット(始動命令)によって開始される瞬間を示し、
ラインdは、FCMを開放するためのERSからのコマンドを示し、
ラインeは、FCMの開放位置または閉鎖位置を示し、
ラインfは、ERSをEOPUに接続するバスを介してERSによって出された命令を示し、
ラインgは、EOPUによって過速度装置HDSに対して出された制御信号の状態を示し、
ラインhは、FCMの位置を観察するためにERSによって使用されるウィンドウを示し、
ラインiは、エンジンの速度Nを示す。
【0038】
ラインaにおいて、段階PBITおよびCBITはそれぞれ、EOPUのスイッチを入れた時に内部回路を自動的に試験する段階、およびEOPUの入力/出力を連続的に試験する段階である。これらの段階は、通常は、電子回路で実施される自動内部試験段階である。
【0039】
スイッチを入れると、段階PBITおよびCBITが実行される(ラインa)。選択された始動モードが自動(ラインb)であるので、ERSは、始動命令(ラインc)に応答して、過速度保護システムの試験の準備および動作を開始する(段階IBIT)。
【0040】
FCMは最初は閉鎖されているので、IBIT試験段階自体が始まる前に、ERSによってFCMを開放する命令が出される(ラインd)。この命令に応答して、FCMが開く(ラインe)。同時に、エンジンはスタータの作用を受けて回転し始め、エンジン速度Nは増加し始める(ラインi)。
【0041】
FCMが開放されるとすぐに、試験段階IBIT自体が開始される。当然、FCMが最初に開放されていた場合には、前のFCMの開放は必要でないことは理解されたい。
【0042】
試験段階IBITは、ERSがEOPUに過速度装置HDSを介してFCMを閉鎖する命令を送信することで始まる(ラインd)。
【0043】
EOPUは、EOPUをERSに接続するバスを介してこの命令の受信を承認し、それに応答して、FCMを閉鎖させるのに適した過速度装置HDSを励磁するための信号を生成する(ラインd)。応答として、FCMは、閉鎖位置に移行する(ラインe)。
【0044】
FCMの位置は、ERSによって連続的に監視される。
【0045】
ERSが閉鎖命令を出した後に、EOPUが過速度装置HDSを介してFCMを閉鎖するのに必要な時間に相当するタイムアウトTの終了前にFCMが閉鎖位置にあることがわかれば、ERSはEOPUに対して過速度装置HDSを解除する命令を送信する(ラインf)。EOPUは、この命令の受信を承認して、過速度装置HDSを励磁する信号を中断し(ラインg)、ひいてはFCMを開放させる。
【0046】
過速度装置HDSを解除する命令の受信の承認を受信すると、また前記命令が実行されると、EOPUは内部試験段階CBIPに戻る。
【0047】
始動プロセスは正常に継続し、ERSはFCMを開放位置にするように(ラインe)動作することができる(ラインd)。このコマンドは、通常、エンジンの速度Nが地上で許可された最大速度の関数である所定値N1に達した時に、自動モードでの始動プロセスの中で生じる。その後、FCMの開放位置がERSによって確認される。
【0048】
過速度保護システムを試験する段階IBITは、速度N1に達するよりかなり前に終了するように始動プロセスの中に組み込まれるが、これは、通常、始動命令と閾値N1に達する瞬間との間は数十秒あるので問題はない。
【0049】
FCMの開閉位置の確認の結果とEOPUの自動内部試験の結果(この結果はバス38を介してERSに利用可能となる)とを結びつけることによって、ERSが過速度保護システムの健全状態を判断して、結果のうちの少なくとも1つが肯定結果でない場合にシステムに関する障害信号を出すことができる。例として、障害信号は、試験が離陸前に地上で行われる場合に、離陸を断念して始動プロセスを中断するか否かを判断することができるように、または試験がメンテナンス時に行われる場合に、過速度保護システムの部品を検査することを決定するために、コックピットに転送される。
【0050】
試験は、最小構成では、FCMが閉鎖位置に達していることを確認するステップを含むことは確認されたい。
【0051】
上述の試験手順は、透明性のある方法で始動プロセスに組み込まれるが、これは、自動モードでの始動プロセスの予測可能性によって可能となる。
【0052】
手動モードで始動する際には同じことは当てはまらない。具体的には、遮断部材が開放される瞬間がパイロットによって選択されるからである。
【0053】
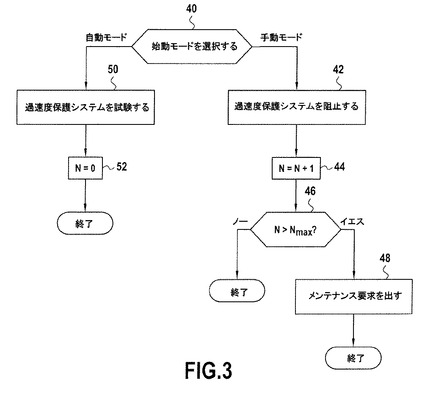
したがって、手動始動モードが選択されると、図4および図5を参照して以下で説明するような本発明の第2の実施形態を適用して過速度保護システムの試験を行うか、または過速度保護システムの試験を全く行わないこともあり得る。しかし、試験が行われない場合、繰り返し試験が行われないのを避けて、試験せずに複数回連続始動が行われた場合にメンテナンス時に試験を行う必要があることを表示するのが望ましい。図3は、上述の目的のためにエンジンの電子調整システムによって実行される過速度保護システムの試験を管理する方法を示す。
【0054】
電子調整システムによって手動始動モードが選択されたことが検出された場合(試験40)、過速度保護システムの試験は阻止される(ステップ42)。ステップ44で、試験なしの始動のカウンタの内容Nがインクリメントされる(N=N+1)。数字Nが最大閾値Nmaxより大きいか否かが確認される(試験46)。最大閾値より大きい場合、電子調整システムによって、過速度保護システムを試験するメンテナンスを要求する情報が出される(ステップ48)。メンテナンス試験は、自動始動モードで、本発明に従って、例えば、図2を参照して説明したように行われる。カウンタの値Nは電子調整システムの不揮発性メモリに記憶されるのが好ましいことは理解されたい。例として、数字Nmaxは、Nmax≦8となるように選択される。
【0055】
自動始動モードが選択されたことが検出された場合(試験40)は、動作中であるかメンテナンス時であるかに関係なく、過速度保護システムは本発明に従って試験され(ステップ50)、ステップ52で数字Nを計数するカウンタは再初期化される(N=0)。
【0056】
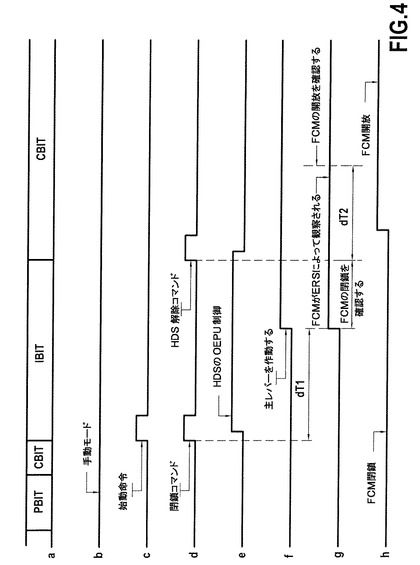
エンジンが手動モードで始動される場合の過速度保護システムを試験する手順の第2の実施形態を、図4を参照しながら説明する。
ラインaは、試験手順の連続段階を示し、
ラインbは、エンジンの始動モードの状態を示し、
ラインcは、パイロット(始動命令)による始動の瞬間を示し、
ラインdは、ERSをEOPUに接続するバスを介して出された命令を示し、
ラインeは、EOPUによって過速度装置HDSに対して出された制御信号の状態を示し、
ラインfは、パイロットが燃料の存在が認められる場合に開く弁を有する主レバーを作動させる瞬間を示し、
ラインgは、ERSによるFCMの位置の観察状態を示し、
ラインhは、FCMの位置を示す。
【0057】
ラインaにおいて、段階PBITおよびCBITはそれぞれ、EOPUのスイッチを入れた時に内部回路を自動的に試験する段階、およびEOPUの入力/出力を連続的に自動的に試験する段階である。これらの段階は、通常は、電子回路で実施される自動内部試験である。
【0058】
スイッチを入れると、段階PBITおよびCBITが実行される(ラインa)。ERSによって検出されたように、選択された始動モードが手動(ラインb)であるので、ERSが始動命令(ラインc)を検出したのに応答して、本発明に従って過速度保護システムの試験の手順が開始される(段階IBIT)。
【0059】
次に、ERSは、EOPUにFCMを閉鎖する命令を送信する(ラインd)。EOPUは、バスを介して命令の受信を承認し、最初閉鎖されていたFCMを閉鎖位置に維持するためにその命令を過速度装置HDSの制御信号に変換する(ラインg)。
【0060】
したがって、試験を開始することでFCMの開放が阻止されるが、この開放は、過速度保護システムを試験せずに手動始動を実行する時、始動命令の後、エンジン速度が燃料の圧力をFCMを開放する閾値より高くするのに十分な速度になった時に生じる。
【0061】
FCMの閉鎖位置の確認は、始動命令の後、FCMを開放するための通常の時間間隔より長い時間間隔dT1の後、許可される(ラインg)。これは、所定の時間間隔、例えば、0.5秒以上、典型的には、0.5秒〜2秒とすることができる。また、ERSによる閉鎖位置の確認は、図示されているように、パイロットが主レバーを作動させるのに応答して開始してもよく(ラインf)、この作動は必ず始動命令に対して十分遅延する。
【0062】
FCMが閉鎖位置にあることが確認されると、ERSはFCMを開放することができるように、EOPUに対して過速度装置HDSを解除する命令を送信する(ラインd)。EOPUは、バスを介してこの命令の受信を承認し、過速度装置HDSを解除する(ラインe)。
【0063】
通常のFCMを開放する時間間隔より長い所定の時間間隔dT2の後に、FCMの開放位置がERSによって確認される。時間間隔dT2は、dT1に等しくなるように、またはほぼ等しくなるように選択されてよい。過速度装置HDSが解除されると、EOPUはCBIT内部試験を含むバックグラウンドタスクの処理を継続する。
【0064】
FCMの閉鎖維持位置および開放位置の確認の結果とEOPUの自動内部試験の結果(この結果はバス38を介してERSに利用可能となる)とを結びつけることによって、ERSが過速度保護システムの健全状態を判断して、結果の全てが肯定結果でない場合にシステムに関する障害信号を出すことができる。例として、障害信号は、離陸を断念するか否かを判断することができるようにコックピットに転送される。
【0065】
試験は、最小構成では、好ましくは、通常始動命令の後に開放するのにかかる時間より長い時間間隔が経過した後に、FCMが閉鎖位置で保持されていることを確認するステップを含むことに留意されたい。
【0066】
上述の試験手順は、FCMの開放の際に遅延が生じるために、過速度保護システムを試験せずに手動モードで始動するのに比べて煩わしい。この遅延は実際には非常に制限される、例えば、1秒未満に制限されるが、手動モードの始動の度に体系的に試験を行うのではなく、試験せずに一定回数の連続手動始動が実行された後のみに試験を行うのが望ましい。また、飛行中の手動モードの始動を実行する時の試験を避けるのが望ましい。この場合、システムが飛行条件下で手動始動時の試験の実行を防ぐ。
【0067】
図5を参照しながら、このように手動始動モードでの過速度保護システムの試験を管理する手順の一実施形態について以下に説明する。この手順は、ERSによってプログラムを使用して実施される。
【0068】
過速度保護システムの試験を実行せずに手動モードで連続始動する回数Mは、内容がERSの不揮発性メモリに記憶されるカウンタによって計数される。
【0069】
手動モードの始動が選択されると、ERSに利用可能なデータに基づいて、航空機が地上にあるか否かが調べられる(40)。地上にない場合、数字Mは1インクリメントされ(42)、過速度保護システムを試験せずに手動モードの始動が実行される(44)。航空機が地上にある場合、数字Mが1以上、例えば、1〜50の所定最大値Mmax未満であるか否かが調べられる(46)。M<Mmaxである場合、方法はステップ42および44に移行する。M≧Mmaxである場合、例えば、図2を参照して上述したように、過速度保護システムの試験が行われる(48)。試験の結果が肯定結果である場合(50)、カウンタの内容Mは0にリセットされ(52)、手順が終了される。試験の結果が否定結果である場合、ERSによって過速度保護システムに関する障害信号が出され(54)、手順が終了する。
【0070】
自動モードでの始動が選択された場合、過速度保護システムの試験が行われ(60)、この試験は自動始動シーケンスに対して透明性がある。カウンタの内容Mは、0にリセットされる。
【0071】
上述の詳細な説明では、本発明は航空機ガスタービンエンジンに適用可能であると考えられる。しかし、過速度保護システムの試験方法は、他のタイプのターボ機械を使用して実施することができる。
【技術分野】
【0001】
本発明は、ターボ機械を過速度から保護するシステムの試験で、エンジンの始動時に行われる試験に関する。本発明は、航空エンジンおよび工業用タービンに適用できる。
【背景技術】
【0002】
過速度として知られているタービンエンジンの過剰な回転速度は、特に、危険な結果をもたらす可能性があり、特に、タービンロータディスクの破裂と共にエンジンに破壊的影響をもたらす可能性がある。
【0003】
したがって、エンジンは、通常、過速度からエンジンを保護するシステムが取り付けられている。
【0004】
通常、このようなシステムは、エンジンの燃焼室に燃料を供給するための回路内に挿入される遮断弁を含む。過速度は、タービンシャフトの回転速度が限界値または過速度閾値を越えた場合に、電子過速度保護ユニットにより検出される。過速度が検出されると、電子過速度保護ユニットは、遮断弁を閉鎖するコマンド、または電子式、電子油圧式、または油圧式の種々の部品を介して燃料の流れ断面を低減するコマンドを送信する。これらの種々の部品は、遮断弁と共に、過速度保護システムの一部を形成する。
【0005】
エンジンを自動的に始動する手順に、過速度保護システムの試験を組み込むのが知られている。欧州特許出願公開第1036917号明細書を参照することができる。上記特許明細書は、エンジンがスタータによって駆動された時に回転し始めると、速度閾値に試験値が加えられるプロセスを記載している。試験値は、点火速度、すなわち、燃料が燃焼室に噴射される回転速度より実質的に低くなるように選択される。回転速度が試験過速度閾値を越えると、過速度保護システムが適切に動作していることが確認される。適切に動作している場合、点火速度に達すると、過速度閾値は低い試験値から実値に切り替えられる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】欧州特許出願公開第1036917号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
知られている試験プロセスでは、燃料計量ユニットのコアの位置を検出することによって確認が行われるが、燃料計量ユニットのコアの位置は、エンジンの電子調整システムによって制御される油圧装置によって最小位置に移動され、この最小位置で遮断弁を閉鎖する。したがって、遮断弁が閉鎖位置になるのを実際に確認することはない。また、試験後の過速度保護機能が有効であれば、過速度閾値の低い試験値から実値への切り替えが正確に行われていると推定することができる。
【課題を解決するための手段】
【0008】
本発明は、始動時のターボ機械の過速度保護システムで、燃料遮断部材と、過速度の検出に応答して遮断部材を閉鎖させてターボ機械の燃焼室への燃料の供給を遮断または低減するためにターボ機械の電子調整システムに接続された遮断部材の制御回路とを含む保護システムを試験するための簡単で信頼性の高い方法であって、
a)ターボ機械を始動させる命令を受信すると、電子調整システムが遮断部材の制御回路に遮断部材を閉鎖する命令または閉鎖位置に保つ命令を送信するステップと、
b)電子調整が遮断部材の開閉位置を表した受信情報に基づいて遮断部材の閉鎖状態を確認するステップと、
c)ステップb)の確認の結果が肯定結果である場合、電子調整システムが遮断部材の制御回路に遮断部材の開放を許可してターボ機械の始動の手順を継続する命令を送信するステップと、
d)ステップb)の確認の結果が否定結果である場合、電子調整システムが過速度保護システムに関する障害信号を出すステップとの試験シーケンスを含む方法を提供するものである。
【0009】
したがって、過速度保護システムの動作は、ターボ機械の電子調整システムからの命令に応答して、遮断部材が閉鎖位置に達しているかどうかを直接確認することで試験される。また、遮断部材の閉鎖がターボ機械の電子調整ユニットとは異なる電子過速度保護ユニットによって制御される場合、過速度保護システムの試験は、電子過速度保護ユニットではなく、むしろ複雑な機能を管理するのに適したリソースを含む電子調整システムによって管理される。さらに、過速度保護システムの健全状態は、電子調整システムによって最終的に決定され、電子調整システムは、通常、航空機のメンテナンスを管理するシステムと通信する唯一のシステムであるので、このようなメンテナンスを管理するシステムとの共通インタフェースを節約することができる。
【0010】
本発明の方法の特徴によれば、試験シーケンスはさらに、
e)ステップc)の後、遮断部材が開放位置に移行したかどうかを確認するステップと、
f)ステップe)の確認の結果が否定結果である場合、電子調整システムが過速度保護システムに関する障害信号を出すステップとを含む。
【0011】
このことで、手動モードでの始動段階で、過速度保護システムが遮断部材を閉鎖することができること、かつ遮断部材の開放を許可することができることの両方を確認する。
【0012】
本発明の方法の特徴によれば、遮断部材の制御回路が遮断部材を閉鎖するための油圧装置と、閉鎖を制御するために油圧装置に接続される過速度から保護するための電子過速度保護ユニットとを備える場合、遮断部材を閉鎖するまたは遮断部材を閉鎖に保つ命令および遮断部材の開放を許可する命令が、エンジンの電子調整システムと電子過速度保護ユニットとの間の通信バスを介して送信される。
【0013】
遮断部材の位置は、遮断部材の可動要素の位置を検出する位置センサによって提供される信号に基づいて確認される場合もある。
【0014】
ターボ機械を自動モードで始動する際に過速度保護システムを試験する方法の一実施形態では、試験シーケンスは、自動モードのターボ機械の始動の手順に従って遮断部材の開放が必要となる前に終了するように始動シーケンスの中に挿入される。
【0015】
この場合、試験シーケンスは、ステップa)の中に、予め開放している遮断部材を閉鎖する命令を送信するステップを含む場合がある。
【0016】
自動モードで始動する際に、始動プロセスは、過速度保護システムの試験を「透明性のある」方法で始動プロセスに影響を与えずに始動プロセスに組み込むことができるように、所定のシナリオに従う。手動モードで始動する際には同じことは当てはまらない。具体的には、遮断部材が点火のために開放される瞬間を決定するのはパイロットまたは他の操作者であるので、確実に始動プロセスが影響を受けずに、本発明の方法を使用する試験を実行することができないからである。その結果、本発明の第1の実施形態では、試験シーケンスは、手動モードでの始動時には阻止されるのが好ましい。
【0017】
このような状況で、好ましくは、手動モードでの連続始動の回数は電子調整システムによって計数され、電子調整システムは、計数値が所定の閾値を越えると、メンテナンス時に過速度保護システムの試験を要求する情報を出す。これにより、過速度保護システムが試験されずに、非常に多くの回数の始動が行われるのを避ける。
【0018】
ターボ機械を手動モードで始動する際に過速度保護システムを試験する方法の第2の実施形態では、試験シーケンスは、ステップa)の中に、始動命令に応答して遮断部材を閉鎖位置に保つ命令を送信するステップを含む。
【0019】
したがって、本発明により、過速度保護システムの試験を手動モードの始動手順の中に挿入することができる。しかし、手動モードでの始動の命令に従って遮断部材が開く通常の時間を越えても遮断部材を閉鎖に保たなければならないので、本発明の方法は、手動始動の通常の機能に比べて煩わしく、実際の点火の遅れにつながる性質がある。
【0020】
そのため、航空機エンジンの過速度保護システムを試験する時に、電子調整システムは、飛行中の再点火の遅れを避けるために、試験が航空機が地上にある時のみに行われるように設計されるのが好ましい。
【0021】
また、過速度保護システムを試験せずに連続して手動始動する回数が所定の値に達したまたは越えた場合に、第2の実施形態を適用して試験が行われるのが好ましい。
【0022】
したがって、まず、過速度保護システムは手動始動の度に試験されず、手動始動が時折および単発で行われる場合に手動モードの始動への影響を避けることができる。次に、複数回の連続始動が手動モードで行われる場合、すなわち、自動始動が介在しない場合、過速度保護システムが試験されずに非常に多くの回数の始動が行われるのを避ける。
【0023】
試験せずに手動モードで連続始動する回数は、手動モードでの始動または自動モードでの始動に関係なく、試験が行われる度に再初期化されるカウンタによって計数されてもよい。
【0024】
本発明は、限定的でない例として添付図面を参照して考察された以下の説明を読めばよりよく理解されるであろう。
【図面の簡単な説明】
【0025】
【図1】ターボ機械の燃料供給回路の図である。
【図2】本発明の第1の実施形態における自動モードでの始動の場合の試験手順時の過速度保護システムで送受信される信号およびシステムの部品の状態のタイミングチャートである。
【図3】過速度保護システムの試験を管理する方法のフローチャートである。
【図4】本発明の第2の実施形態における手動モードでの始動試験手順時の過速度保護システムによって出されるまたは送信される信号およびシステムの部品の状態のタイミングチャートである。
【図5】過速度保護システムの試験を管理する別の方法のフローチャートである。
【発明を実施するための形態】
【0026】
図1は、ターボ機械、例えば、航空機ガスタービンエンジンの燃料供給回路の一例を示す図である。
【0027】
低圧(LP)ポンプ(図示せず)を介して燃料タンクから流入するLP燃料は、LP燃料回路10によって高圧(HP)ポンプ12の入口に送られる。例として、HPポンプ12は、エンジンのタービンシャフトに機械的に接続される補機ギアボックスによって駆動される容積型ポンプである。
【0028】
ポンプ12によって供給されたHP燃料は、フィルタ14と、エンジンの潤滑油と熱交換することによって燃料が加熱される熱交換器16とを通って計量ユニット20に送られる。熱交換器16からの出口におけるHP燃料の一部は、エンジンの種々の油圧式または電気油圧式部品の油圧流体として使用される。
【0029】
例として、計量ユニット20は、サーボ弁24によって制御される可変開放計量弁22を備える。弁26は、計量弁22によって供給される燃料の流れが計量弁を通る流れ断面によって決定されるように、計量弁の燃料入口と出口との一定の圧力差を維持する。流量は、弁22のコアの位置を所望の流れ断面に対応する設定位置にサーボ制御することによって、エンジンの電子調整システム(ERS)18の制御の下でサーボ弁24によって調整される。このために、弁のコアに固定されたロッドに関連付けられた、例えば、線形可変差動変換器(LVDT)式の位置センサ22aによって、弁22のコアの実位置を表す情報がERS18に提供される。計量ユニットへの入口における過剰燃料は、弁26によってLP燃料回路に供給される。
【0030】
計量ユニット20からの出口におけるHP燃料の調整流れは、燃焼遮断部材32を通ってエンジンの燃焼室28の噴射器に送られる。用語「燃料遮断部材」は、本明細書では、エンジンの過速度が検出された場合にERS18の制御の下で完全にまたは部分的に閉鎖された時に、燃焼室に向かう燃料の流れを完全に遮断する、または前記流れを最小値に制限するのに適した部品を指すのに使用されている。
【0031】
図示されている例では、燃料遮断部材(FCM)32は、弁を通る流れ断面を決定する位置のスライド32aを有する弁である。スライド32aは、片側では、スプリング32bの作用を受けてチャンバ32cの圧力を受け、反対側では、計量ユニット20に接続された弁32の入口の圧力を受ける。チャンバ32cは、HP燃料を受け入れる入口ポートと、専用の過速度装置HDS34を介してLP燃料回路10に接続される出口ポートとを有する。この過速度装置は、励磁巻線34aを有する電磁弁の形態である。巻線34aに電力が供給されると、電磁弁34は閉止位置にされてその位置で保持される。次に、スライド32aは、スプリング32bおよびチャンバ32cの圧力を利用して、弁32を閉鎖する位置になる。巻線34aに電力が供給されない時は、電磁弁34は開放され、スライド32aは、燃料の圧力が計量ユニットから弁32に伝わることで開放位置まで移動される。弁32の開閉位置を表す信号は、スライド32aに固定されたロッド32eと協働する、例えば、LVDT式の位置センサ32dによって提供される。この信号は、ERS18に直接送信される。
【0032】
また、弁32は、ERS18によって開放される。
【0033】
過速度装置HDS34は、例えば、ARINCフォーマットの通信バスを介してERS18と通信する電子過速度保護ユニット(EOPU)36によって制御される。ERS18によって出された閉鎖命令に応答して、EOPU36は、過速度装置HDS34を閉鎖位置に保つのに適した巻線34aの励磁信号を生成する。したがって、部品32(位置センサ32dと一体となって)、34、36は、過速度保護システム30を形成する。当然、FCM32および過速度装置HDS34は、弁および電磁弁を使用する以外で実行される場合があり、任意で、過速度装置HDS34は、EOPU36とFCM32との間のシステムに組み込まれた複数の部品で構成される可能性がある。FCM32の閉鎖によるエンジン停止は、コックピットから電磁弁34を開放することで制御することができる。
【0034】
ERS18は、特に、パイロットによって選択される始動モード、つまり自動モードまたは手動モードを表す情報を受信するために航空機のコックピット39に接続される。
【0035】
図2を参照しながら、自動モードでエンジンを始動するのに適用できる過速度保護システムを試験する手順の第1の実施形態について以下に説明する。
【0036】
それ自体知られているように、自動モードで始動するプロセスは、ERS18によって開始からエンジン速度(タービンシャフトの回転速度)に応じて順番に管理され、ERS18は連続的に、スタータを運転状態にして、点火装置を作動させ、燃料が噴射される速度を制御するように働く。
【0037】
図2において、
ラインaは、試験手順の連続段階を示し、
ラインbは、エンジンのスタータモジュールの状態を示し、
ラインcは、始動プロセスがパイロット(始動命令)によって開始される瞬間を示し、
ラインdは、FCMを開放するためのERSからのコマンドを示し、
ラインeは、FCMの開放位置または閉鎖位置を示し、
ラインfは、ERSをEOPUに接続するバスを介してERSによって出された命令を示し、
ラインgは、EOPUによって過速度装置HDSに対して出された制御信号の状態を示し、
ラインhは、FCMの位置を観察するためにERSによって使用されるウィンドウを示し、
ラインiは、エンジンの速度Nを示す。
【0038】
ラインaにおいて、段階PBITおよびCBITはそれぞれ、EOPUのスイッチを入れた時に内部回路を自動的に試験する段階、およびEOPUの入力/出力を連続的に試験する段階である。これらの段階は、通常は、電子回路で実施される自動内部試験段階である。
【0039】
スイッチを入れると、段階PBITおよびCBITが実行される(ラインa)。選択された始動モードが自動(ラインb)であるので、ERSは、始動命令(ラインc)に応答して、過速度保護システムの試験の準備および動作を開始する(段階IBIT)。
【0040】
FCMは最初は閉鎖されているので、IBIT試験段階自体が始まる前に、ERSによってFCMを開放する命令が出される(ラインd)。この命令に応答して、FCMが開く(ラインe)。同時に、エンジンはスタータの作用を受けて回転し始め、エンジン速度Nは増加し始める(ラインi)。
【0041】
FCMが開放されるとすぐに、試験段階IBIT自体が開始される。当然、FCMが最初に開放されていた場合には、前のFCMの開放は必要でないことは理解されたい。
【0042】
試験段階IBITは、ERSがEOPUに過速度装置HDSを介してFCMを閉鎖する命令を送信することで始まる(ラインd)。
【0043】
EOPUは、EOPUをERSに接続するバスを介してこの命令の受信を承認し、それに応答して、FCMを閉鎖させるのに適した過速度装置HDSを励磁するための信号を生成する(ラインd)。応答として、FCMは、閉鎖位置に移行する(ラインe)。
【0044】
FCMの位置は、ERSによって連続的に監視される。
【0045】
ERSが閉鎖命令を出した後に、EOPUが過速度装置HDSを介してFCMを閉鎖するのに必要な時間に相当するタイムアウトTの終了前にFCMが閉鎖位置にあることがわかれば、ERSはEOPUに対して過速度装置HDSを解除する命令を送信する(ラインf)。EOPUは、この命令の受信を承認して、過速度装置HDSを励磁する信号を中断し(ラインg)、ひいてはFCMを開放させる。
【0046】
過速度装置HDSを解除する命令の受信の承認を受信すると、また前記命令が実行されると、EOPUは内部試験段階CBIPに戻る。
【0047】
始動プロセスは正常に継続し、ERSはFCMを開放位置にするように(ラインe)動作することができる(ラインd)。このコマンドは、通常、エンジンの速度Nが地上で許可された最大速度の関数である所定値N1に達した時に、自動モードでの始動プロセスの中で生じる。その後、FCMの開放位置がERSによって確認される。
【0048】
過速度保護システムを試験する段階IBITは、速度N1に達するよりかなり前に終了するように始動プロセスの中に組み込まれるが、これは、通常、始動命令と閾値N1に達する瞬間との間は数十秒あるので問題はない。
【0049】
FCMの開閉位置の確認の結果とEOPUの自動内部試験の結果(この結果はバス38を介してERSに利用可能となる)とを結びつけることによって、ERSが過速度保護システムの健全状態を判断して、結果のうちの少なくとも1つが肯定結果でない場合にシステムに関する障害信号を出すことができる。例として、障害信号は、試験が離陸前に地上で行われる場合に、離陸を断念して始動プロセスを中断するか否かを判断することができるように、または試験がメンテナンス時に行われる場合に、過速度保護システムの部品を検査することを決定するために、コックピットに転送される。
【0050】
試験は、最小構成では、FCMが閉鎖位置に達していることを確認するステップを含むことは確認されたい。
【0051】
上述の試験手順は、透明性のある方法で始動プロセスに組み込まれるが、これは、自動モードでの始動プロセスの予測可能性によって可能となる。
【0052】
手動モードで始動する際には同じことは当てはまらない。具体的には、遮断部材が開放される瞬間がパイロットによって選択されるからである。
【0053】
したがって、手動始動モードが選択されると、図4および図5を参照して以下で説明するような本発明の第2の実施形態を適用して過速度保護システムの試験を行うか、または過速度保護システムの試験を全く行わないこともあり得る。しかし、試験が行われない場合、繰り返し試験が行われないのを避けて、試験せずに複数回連続始動が行われた場合にメンテナンス時に試験を行う必要があることを表示するのが望ましい。図3は、上述の目的のためにエンジンの電子調整システムによって実行される過速度保護システムの試験を管理する方法を示す。
【0054】
電子調整システムによって手動始動モードが選択されたことが検出された場合(試験40)、過速度保護システムの試験は阻止される(ステップ42)。ステップ44で、試験なしの始動のカウンタの内容Nがインクリメントされる(N=N+1)。数字Nが最大閾値Nmaxより大きいか否かが確認される(試験46)。最大閾値より大きい場合、電子調整システムによって、過速度保護システムを試験するメンテナンスを要求する情報が出される(ステップ48)。メンテナンス試験は、自動始動モードで、本発明に従って、例えば、図2を参照して説明したように行われる。カウンタの値Nは電子調整システムの不揮発性メモリに記憶されるのが好ましいことは理解されたい。例として、数字Nmaxは、Nmax≦8となるように選択される。
【0055】
自動始動モードが選択されたことが検出された場合(試験40)は、動作中であるかメンテナンス時であるかに関係なく、過速度保護システムは本発明に従って試験され(ステップ50)、ステップ52で数字Nを計数するカウンタは再初期化される(N=0)。
【0056】
エンジンが手動モードで始動される場合の過速度保護システムを試験する手順の第2の実施形態を、図4を参照しながら説明する。
ラインaは、試験手順の連続段階を示し、
ラインbは、エンジンの始動モードの状態を示し、
ラインcは、パイロット(始動命令)による始動の瞬間を示し、
ラインdは、ERSをEOPUに接続するバスを介して出された命令を示し、
ラインeは、EOPUによって過速度装置HDSに対して出された制御信号の状態を示し、
ラインfは、パイロットが燃料の存在が認められる場合に開く弁を有する主レバーを作動させる瞬間を示し、
ラインgは、ERSによるFCMの位置の観察状態を示し、
ラインhは、FCMの位置を示す。
【0057】
ラインaにおいて、段階PBITおよびCBITはそれぞれ、EOPUのスイッチを入れた時に内部回路を自動的に試験する段階、およびEOPUの入力/出力を連続的に自動的に試験する段階である。これらの段階は、通常は、電子回路で実施される自動内部試験である。
【0058】
スイッチを入れると、段階PBITおよびCBITが実行される(ラインa)。ERSによって検出されたように、選択された始動モードが手動(ラインb)であるので、ERSが始動命令(ラインc)を検出したのに応答して、本発明に従って過速度保護システムの試験の手順が開始される(段階IBIT)。
【0059】
次に、ERSは、EOPUにFCMを閉鎖する命令を送信する(ラインd)。EOPUは、バスを介して命令の受信を承認し、最初閉鎖されていたFCMを閉鎖位置に維持するためにその命令を過速度装置HDSの制御信号に変換する(ラインg)。
【0060】
したがって、試験を開始することでFCMの開放が阻止されるが、この開放は、過速度保護システムを試験せずに手動始動を実行する時、始動命令の後、エンジン速度が燃料の圧力をFCMを開放する閾値より高くするのに十分な速度になった時に生じる。
【0061】
FCMの閉鎖位置の確認は、始動命令の後、FCMを開放するための通常の時間間隔より長い時間間隔dT1の後、許可される(ラインg)。これは、所定の時間間隔、例えば、0.5秒以上、典型的には、0.5秒〜2秒とすることができる。また、ERSによる閉鎖位置の確認は、図示されているように、パイロットが主レバーを作動させるのに応答して開始してもよく(ラインf)、この作動は必ず始動命令に対して十分遅延する。
【0062】
FCMが閉鎖位置にあることが確認されると、ERSはFCMを開放することができるように、EOPUに対して過速度装置HDSを解除する命令を送信する(ラインd)。EOPUは、バスを介してこの命令の受信を承認し、過速度装置HDSを解除する(ラインe)。
【0063】
通常のFCMを開放する時間間隔より長い所定の時間間隔dT2の後に、FCMの開放位置がERSによって確認される。時間間隔dT2は、dT1に等しくなるように、またはほぼ等しくなるように選択されてよい。過速度装置HDSが解除されると、EOPUはCBIT内部試験を含むバックグラウンドタスクの処理を継続する。
【0064】
FCMの閉鎖維持位置および開放位置の確認の結果とEOPUの自動内部試験の結果(この結果はバス38を介してERSに利用可能となる)とを結びつけることによって、ERSが過速度保護システムの健全状態を判断して、結果の全てが肯定結果でない場合にシステムに関する障害信号を出すことができる。例として、障害信号は、離陸を断念するか否かを判断することができるようにコックピットに転送される。
【0065】
試験は、最小構成では、好ましくは、通常始動命令の後に開放するのにかかる時間より長い時間間隔が経過した後に、FCMが閉鎖位置で保持されていることを確認するステップを含むことに留意されたい。
【0066】
上述の試験手順は、FCMの開放の際に遅延が生じるために、過速度保護システムを試験せずに手動モードで始動するのに比べて煩わしい。この遅延は実際には非常に制限される、例えば、1秒未満に制限されるが、手動モードの始動の度に体系的に試験を行うのではなく、試験せずに一定回数の連続手動始動が実行された後のみに試験を行うのが望ましい。また、飛行中の手動モードの始動を実行する時の試験を避けるのが望ましい。この場合、システムが飛行条件下で手動始動時の試験の実行を防ぐ。
【0067】
図5を参照しながら、このように手動始動モードでの過速度保護システムの試験を管理する手順の一実施形態について以下に説明する。この手順は、ERSによってプログラムを使用して実施される。
【0068】
過速度保護システムの試験を実行せずに手動モードで連続始動する回数Mは、内容がERSの不揮発性メモリに記憶されるカウンタによって計数される。
【0069】
手動モードの始動が選択されると、ERSに利用可能なデータに基づいて、航空機が地上にあるか否かが調べられる(40)。地上にない場合、数字Mは1インクリメントされ(42)、過速度保護システムを試験せずに手動モードの始動が実行される(44)。航空機が地上にある場合、数字Mが1以上、例えば、1〜50の所定最大値Mmax未満であるか否かが調べられる(46)。M<Mmaxである場合、方法はステップ42および44に移行する。M≧Mmaxである場合、例えば、図2を参照して上述したように、過速度保護システムの試験が行われる(48)。試験の結果が肯定結果である場合(50)、カウンタの内容Mは0にリセットされ(52)、手順が終了される。試験の結果が否定結果である場合、ERSによって過速度保護システムに関する障害信号が出され(54)、手順が終了する。
【0070】
自動モードでの始動が選択された場合、過速度保護システムの試験が行われ(60)、この試験は自動始動シーケンスに対して透明性がある。カウンタの内容Mは、0にリセットされる。
【0071】
上述の詳細な説明では、本発明は航空機ガスタービンエンジンに適用可能であると考えられる。しかし、過速度保護システムの試験方法は、他のタイプのターボ機械を使用して実施することができる。
【特許請求の範囲】
【請求項1】
ターボ機械の始動時にターボ機械を過速度から保護するシステムで、燃料遮断部材と、過速度の検出に応答して遮断部材を閉鎖させてターボ機械の燃焼室への燃料の供給を遮断または低減するためにエンジンの電子調整システムに接続された遮断部材を制御する回路とを含む保護システムを試験する方法であって、
a)ターボ機械を始動させる命令を受信すると、電子調整システムが遮断部材の制御回路に遮断部材を閉鎖する命令または閉鎖位置に保つ命令を送信するステップと、
b)電子調整システムが遮断部材の開閉位置を表した受信情報に基づいて遮断部材の閉鎖状態を確認するステップと、
c)ステップb)の確認の結果が肯定結果である場合、電子調整システムが遮断部材の制御回路に遮断部材の開放を許可してターボ機械の始動の手順を継続する命令を送信するステップと、
d)ステップb)の確認の結果が否定結果である場合、電子調整システムが過速度保護システムに関する障害信号を出すステップとの試験シーケンスを含むことを特徴とする、方法。
【請求項2】
試験シーケンスがさらに、
e)ステップc)の後、遮断部材が開放位置に移行したことを確認するステップと、
f)ステップe)の確認の結果が否定結果である場合、電子調整システムが過速度保護システムに関する障害信号を出すステップと
を含むことを特徴とする、請求項1に記載の方法。
【請求項3】
遮断部材の制御回路が、遮断部材を閉鎖するための油圧装置と、閉鎖を制御するために油圧装置に接続される過速度から保護するための電子過速度保護ユニットとを備え、遮断部材を閉鎖するまたは遮断部材を閉鎖されたままに保つ命令および遮断部材の開放を許可する命令が、ターボ機械の電子調整システムと電子過速度保護ユニットとの間の通信バスを介して送信されることを特徴とする、請求項1または請求項2に記載の方法。
【請求項4】
遮断部材の位置が、遮断部材の可動要素の位置を検出する位置センサによって提供される信号に基づいて確認されることを特徴とする、請求項1から3のいずれか一項に記載の方法。
【請求項5】
ターボ機械を自動モードで始動する際の過速度保護システムを試験するために、試験シーケンスが、自動モードのターボ機械の始動の手順に従って遮断部材の開放が必要となる前に終了するように始動シーケンスの中に挿入されることを特徴とする、請求項1から4のいずれか一項に記載の方法。
【請求項6】
試験シーケンスが、ステップa)の中に、予め開放している遮断部材を閉鎖する命令を送信するステップを含むことを特徴とする、請求項5に記載の方法。
【請求項7】
試験シーケンスが、手動モードでの始動の際に阻止されることを特徴とする、請求項5または請求項6に記載の方法。
【請求項8】
手動モードでの連続始動の回数が電子調整システムによって計数され、電子調整システムが、計数値が所定の閾値を越えると、メンテナンス時に過速度保護システムの試験を要求する情報を出すことを特徴とする、請求項7に記載の方法。
【請求項9】
ターボ機械を手動モードで始動する際の過速度保護システムを試験するために、試験シーケンスが、ステップa)の中に、始動命令に応答して遮断部材を閉鎖位置に保つ命令を送信するステップを含むことを特徴とする、請求項1から4のいずれか一項に記載の方法。
【請求項10】
航空機エンジンの過速度保護システムを試験するために、電子調整システムが、試験が航空機が地上にある時のみに行われるように設計されることを特徴とする、請求項9に記載の方法。
【請求項11】
ターボ機械の過速度からの保護の試験を管理する方法であって、過速度保護システムを試験せずに連続始動する回数が所定値に達したまたは越えた場合に、請求項9または請求項10に従って試験が行われることを特徴とする、方法。
【請求項12】
試験せずに手動モードで連続始動する回数が、手動モードでの始動または自動モードでの始動に関係なく、試験が行われる度に再初期化されるカウンタによって計数されることを特徴とする、請求項11に記載の方法。
【請求項1】
ターボ機械の始動時にターボ機械を過速度から保護するシステムで、燃料遮断部材と、過速度の検出に応答して遮断部材を閉鎖させてターボ機械の燃焼室への燃料の供給を遮断または低減するためにエンジンの電子調整システムに接続された遮断部材を制御する回路とを含む保護システムを試験する方法であって、
a)ターボ機械を始動させる命令を受信すると、電子調整システムが遮断部材の制御回路に遮断部材を閉鎖する命令または閉鎖位置に保つ命令を送信するステップと、
b)電子調整システムが遮断部材の開閉位置を表した受信情報に基づいて遮断部材の閉鎖状態を確認するステップと、
c)ステップb)の確認の結果が肯定結果である場合、電子調整システムが遮断部材の制御回路に遮断部材の開放を許可してターボ機械の始動の手順を継続する命令を送信するステップと、
d)ステップb)の確認の結果が否定結果である場合、電子調整システムが過速度保護システムに関する障害信号を出すステップとの試験シーケンスを含むことを特徴とする、方法。
【請求項2】
試験シーケンスがさらに、
e)ステップc)の後、遮断部材が開放位置に移行したことを確認するステップと、
f)ステップe)の確認の結果が否定結果である場合、電子調整システムが過速度保護システムに関する障害信号を出すステップと
を含むことを特徴とする、請求項1に記載の方法。
【請求項3】
遮断部材の制御回路が、遮断部材を閉鎖するための油圧装置と、閉鎖を制御するために油圧装置に接続される過速度から保護するための電子過速度保護ユニットとを備え、遮断部材を閉鎖するまたは遮断部材を閉鎖されたままに保つ命令および遮断部材の開放を許可する命令が、ターボ機械の電子調整システムと電子過速度保護ユニットとの間の通信バスを介して送信されることを特徴とする、請求項1または請求項2に記載の方法。
【請求項4】
遮断部材の位置が、遮断部材の可動要素の位置を検出する位置センサによって提供される信号に基づいて確認されることを特徴とする、請求項1から3のいずれか一項に記載の方法。
【請求項5】
ターボ機械を自動モードで始動する際の過速度保護システムを試験するために、試験シーケンスが、自動モードのターボ機械の始動の手順に従って遮断部材の開放が必要となる前に終了するように始動シーケンスの中に挿入されることを特徴とする、請求項1から4のいずれか一項に記載の方法。
【請求項6】
試験シーケンスが、ステップa)の中に、予め開放している遮断部材を閉鎖する命令を送信するステップを含むことを特徴とする、請求項5に記載の方法。
【請求項7】
試験シーケンスが、手動モードでの始動の際に阻止されることを特徴とする、請求項5または請求項6に記載の方法。
【請求項8】
手動モードでの連続始動の回数が電子調整システムによって計数され、電子調整システムが、計数値が所定の閾値を越えると、メンテナンス時に過速度保護システムの試験を要求する情報を出すことを特徴とする、請求項7に記載の方法。
【請求項9】
ターボ機械を手動モードで始動する際の過速度保護システムを試験するために、試験シーケンスが、ステップa)の中に、始動命令に応答して遮断部材を閉鎖位置に保つ命令を送信するステップを含むことを特徴とする、請求項1から4のいずれか一項に記載の方法。
【請求項10】
航空機エンジンの過速度保護システムを試験するために、電子調整システムが、試験が航空機が地上にある時のみに行われるように設計されることを特徴とする、請求項9に記載の方法。
【請求項11】
ターボ機械の過速度からの保護の試験を管理する方法であって、過速度保護システムを試験せずに連続始動する回数が所定値に達したまたは越えた場合に、請求項9または請求項10に従って試験が行われることを特徴とする、方法。
【請求項12】
試験せずに手動モードで連続始動する回数が、手動モードでの始動または自動モードでの始動に関係なく、試験が行われる度に再初期化されるカウンタによって計数されることを特徴とする、請求項11に記載の方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公表番号】特表2012−529595(P2012−529595A)
【公表日】平成24年11月22日(2012.11.22)
【国際特許分類】
【出願番号】特願2012−514515(P2012−514515)
【出願日】平成22年6月2日(2010.6.2)
【国際出願番号】PCT/FR2010/051072
【国際公開番号】WO2010/142886
【国際公開日】平成22年12月16日(2010.12.16)
【出願人】(505277691)スネクマ (567)
【Fターム(参考)】
【公表日】平成24年11月22日(2012.11.22)
【国際特許分類】
【出願日】平成22年6月2日(2010.6.2)
【国際出願番号】PCT/FR2010/051072
【国際公開番号】WO2010/142886
【国際公開日】平成22年12月16日(2010.12.16)
【出願人】(505277691)スネクマ (567)
【Fターム(参考)】
[ Back to top ]