
始動発電機の制御装置
【課題】エンジン10の始動に際しての初期回転の付与手段として発電機(始動発電機40)を併用するに際し、始動発電機40によって生成可能なトルクが小さいために、エンジン10の始動性等が低下すること。
【解決手段】リレー48は、バッテリ46の正極端子を、インバータINVの正極側入力端子と始動発電機40の中性点Nとのいずれかに選択的に接続する。エンジン10の始動に際しては、バッテリ46の正極を中性点Nに接続してインバータINVの入力電圧を昇圧し、インバータINVの入力電圧がバッテリ46の端子電圧Vbであるときよりも生成可能なトルクを増大させる。これにより、始動性を向上させたり、燃料カット制御からの復帰回転速度を低下させて燃費を改善したりすることができる。
【解決手段】リレー48は、バッテリ46の正極端子を、インバータINVの正極側入力端子と始動発電機40の中性点Nとのいずれかに選択的に接続する。エンジン10の始動に際しては、バッテリ46の正極を中性点Nに接続してインバータINVの入力電圧を昇圧し、インバータINVの入力電圧がバッテリ46の端子電圧Vbであるときよりも生成可能なトルクを増大させる。これにより、始動性を向上させたり、燃料カット制御からの復帰回転速度を低下させて燃費を改善したりすることができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動2輪車のエンジン等に設けられる始動発電機について、該始動発電機を制御対象とする始動発電機の制御装置に関する。
【背景技術】
【0002】
例えば下記特許文献1に見られるように、自動2輪車において、内燃機関のクランク軸の回転エネルギを電気エネルギに変換する発電機を、内燃機関の始動に際してクランク軸に初期回転を付与する電動機として併用することが提案されている。ここでは、内燃機関の始動に際して、電動機によって生成されるトルクによっては、圧縮行程においてクランク軸に付与される負荷トルクに打ち勝つことが困難であることに鑑み、圧縮行程において排気バルブを開弁させ、負荷トルクを低減するデコンプ装置を利用している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−255272号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ただし、上記デコンプ装置を備えたとしても、電動機のトルクが小さいために、始動に要する時間が長くなる等、クランク軸に付与するトルクが小さいことによる問題が解消されるわけではない。
【0005】
本発明は、上記課題を解決する過程でなされたものであり、その目的は、車載主機としての内燃機関のクランク軸の回転エネルギを電気エネルギに変換してバッテリに充電するための始動発電機について、該始動発電機を制御対象とする新たな始動発電機の制御装置を提供することにある。
【課題を解決するための手段】
【0006】
以下、上記課題を解決するための手段、およびその作用効果について記載する。
【0007】
請求項1記載の発明は、内燃機関のクランク軸の回転エネルギを電気エネルギに変換してバッテリ(46)に充電するための始動発電機について、該始動発電機を制御対象とする始動発電機の制御装置において、前記始動発電機は、固定子巻線同士が中性点で接続されたものであり、前記始動発電機には、コンデンサを備えた直流電圧源(42)の正極および負極のそれぞれと前記始動発電機の各固定子巻線との間を開閉するスイッチング素子を備える直流交流変換回路(INV)が接続され、前記中性点と前記バッテリ(46)とが接続された状態で、前記直流交流変換回路(INV)を構成する前記スイッチング素子の操作によって前記直流電圧源(42)の電圧を前記バッテリ(46)の電圧に対して昇圧する昇圧制御手段と、前記昇圧制御手段によって前記直流電圧源(42)の電圧が前記バッテリ(46)の電圧よりも高くなっている状態で前記直流交流変換回路(INV)を構成する前記スイッチング素子を操作することで、前記始動発電機を電動機として利用して前記クランク軸にトルクを付与するトルク付与手段とを備えることを特徴とする。
【0008】
上記発明では、固定子巻線および直流交流変換回路を構成するスイッチング素子によって昇圧チョッパ回路を構成することで、直流電圧源の電圧をバッテリの端子電圧に対して昇圧することができる。このため、部品点数の増加等を極力抑制または回避しつつ直流交流変換回路の入力電圧を上昇させることができる。そしてこれにより、始動発電機を電動機として機能させる際のトルクを増大させることができるため、発電機としての機能が主である始動発電機を用いてクランク軸の回転に必要なトルクを付与することができる。
【0009】
請求項2記載の発明は、請求項1記載の発明において、前記クランク軸の回転速度をアイドリング時の目標値に制御するアイドル回転速度制御手段を備え、前記直流交流変換回路の入力電圧を前記バッテリの端子電圧とした場合に生成可能な前記始動発電機のトルクが、前記クランク軸の回転速度をゼロから前記目標値まで上昇させるのに要するトルクよりも小さいことを特徴とする。
【0010】
上記発明では、始動発電機を電動機として利用した場合のトルクが、直流交流変換回路の入力電圧をバッテリの端子電圧とすると、非常に小さいものとなっている。このため、始動発電機の主の用途である発電機としての用途に従って設計した場合と比較して体格の大型化等を極力抑制した始動発電機や直流交流変換回路を実現することができる。そしてこの場合、クランク軸にトルクを付与するに際してトルクが不足する懸念が生じるものの、これについては昇圧制御手段およびトルク付与手段によって解消される。
【0011】
請求項3記載の発明は、請求項1または2記載の発明において、車両を駆動するためのトルクに関するユーザの要求が所定以下であることに基づき前記内燃機関の燃焼制御を停止する停止手段と、該停止手段による停止処理がなされているとき、前記内燃機関の回転速度が復帰回転速度以下となることで前記燃焼制御を開始する復帰手段とを備え、前記トルク付与手段は、前記復帰手段によって燃焼制御が開始される場合、前記トルクを付与する処理としての燃料復帰アシスト処理を行なう燃料復帰アシスト手段を備えることを特徴とする。
【0012】
復帰回転速度は、内燃機関の燃焼制御の再開に伴ってその回転速度を安定させることができる速度でなければならない。そしてこの復帰回転速度は、燃料復帰アシスト処理を行なわない場合と比較して燃料復帰アシスト処理を行なう場合には低い回転速度に設定することができ、これにより燃料消費量や排出ガス量を少なくすることが可能であることが発明者らによって見出されている。上記発明では、この点に鑑み、燃料復帰アシスト処理手段を備えた。
【0013】
請求項4記載の発明は、請求項3記載の発明において、前記復帰手段は、前記バッテリの充電率が高い場合、前記復帰回転速度を低下させるものであることを特徴とする。
【0014】
復帰回転速度が低いほど、燃料復帰アシスト処理に要求される電力量が多くなる。このため、バッテリの充電率が低いにもかかわらず復帰回転速度を過度に低下させる場合には、燃料復帰アシスト処理によって消費される電力量が過度に大きくなり、ひいてはバッテリを電源とする電子機器の駆動に支障をきたすことが懸念される。この点、上記発明では、復帰回転速度を充電率に応じて定めることで、こうした事態を回避しつつも復帰回転速度を極力低下させることができる。
【0015】
請求項5記載の発明は、請求項3または4記載の発明において、前記クランク軸の回転速度をアイドリング時の目標値に制御するアイドル回転速度制御手段を備え、前記燃料復帰アシスト手段は、前記クランク軸の回転速度が前記目標値にて安定することと車両の駆動トルクに関するユーザの要求が増大することとの論理和条件が真となることを条件に前記燃料復帰アシスト処理を停止することを特徴とする。
【0016】
請求項6記載の発明は、請求項1〜5のいずれか1項に記載の発明において、ユーザによる車両の停車意思に基づき、前記内燃機関の燃焼制御を停止する自動停止処理を行なう自動停止処理手段と、前記自動停止処理の後、ユーザによる車両の発進意思に基づき、前記内燃機関の燃焼制御を開始する自動始動処理を行なう自動始動処理手段とを備え、前記トルク付与手段は、前記自動停止処理によって前記クランク軸の回転速度がゼロに向けて低下している状況下、前記自動始動処理が要求される場合、前記トルクを付与する処理としてのチェンジオブマインドアシスト処理を行なうチェンジオブマインドアシスト手段を備えることを特徴とする。
【0017】
自動停止処理によって内燃機関の回転速度が低下する状況下、ユーザによる車両の発進意思が生じる場合には、自動停止処理を行なわなかった場合と比較してユーザの要求に迅速に対応することができなくなるおそれがある。この点、上記発明では、チェンジオブマインドアシスト処理を行なうことで、始動発電機の応答性を利用して内燃機関の回転速度を迅速に上昇させることができ、ひいてはユーザの要求に迅速に対応することができる。
【0018】
請求項7記載の発明は、請求項6記載の発明において、前記チェンジオブマインドアシスト手段は、前記クランク軸の回転速度が規定速度以上であることを条件に、前記昇圧制御手段によって昇圧された前記直流電圧源の電圧を利用するものであって且つ、前記クランク軸の回転速度が規定速度未満である場合、前記チェンジオブマインドアシスト処理として、前記直流電圧源の電圧を制限しつつ前記始動発電機を電動機として利用することで、前記クランク軸にトルクを付与する制限トルク付与処理を行なう制限トルク付与手段を備えることを特徴とする。
【0019】
始動発電機を流れる電流は、直流交流変換回路によって始動発電機に印加される電圧と始動発電機の逆起電圧との差に応じたものとなる。このため、始動発電機の回転速度が過度に小さい場合には、始動発電機に過度に大きい電流が流れることで始動発電機や直流交流変換回路の信頼性の低下を招いたり、電力の浪費につながったりするおそれがある。上記発明では、こうした事態を回避すべく、制限トルク付与手段を備えた。
【0020】
請求項8記載の発明は、請求項6または7記載の発明において、前記チェンジオブマインドアシスト手段は、前記バッテリの充電率が高いほど前記チェンジオブマインドアシスト処理の実行期間を長く設定する可変手段を備えることを特徴とする。
【0021】
実行期間が長いほど、チェンジオブマインドアシスト処理に要求される電力量が多くなる。このため、バッテリの充電率が低いにもかかわらず実行期間を過度に長くする場合には、チェンジオブマインドアシスト処理によって消費される電力量が過度に大きくなり、ひいてはバッテリを電源とする電子機器の駆動に支障をきたすことが懸念される。この点、上記発明では、実行期間の長さを充電率に応じて定めることで、こうした事態を回避しつつも実行期間を極力長く設定することができる。
【0022】
請求項9記載の発明は、請求項1〜8のいずれか1項に記載の発明において、車両を駆動するトルクの増大要求の有無を判断する加速要求判断手段を備え、前記トルク付与手段は、前記トルクの増大要求があると判断される場合、前記トルクを付与する処理としての加速アシスト処理を行なう加速アシスト手段を備えることを特徴とする。
【0023】
車両を駆動するトルクの増大要求に内燃機関のみによって応じる場合、内燃機関における燃焼エネルギを増加させる処理に要する時間のためにトルクが増大するまでに要する時間が長くなる傾向にあり、いわゆる加速性能が低下する。上記発明では、この点に鑑み、始動発電機を用いて加速アシスト処理を実行することで、加速性能を改善することができる。
【0024】
請求項10記載の発明は、請求項9記載の発明において、前記バッテリの充電率が低い場合、前記加速アシスト処理を禁止する禁止手段を備えることを特徴とする。
【0025】
加速アシスト処理を実行する場合、バッテリの蓄電エネルギが消費される。このため、バッテリの充電率が過度に低いにもかかわらず加速アシスト処理を行なう場合には、バッテリを電源とする電子機器の駆動に支障をきたすことが懸念される。この点、上記発明では、禁止手段を備えることでこうした事態が生じることを回避することができる。
【0026】
請求項11記載の発明は、請求項1〜10のいずれか1項に記載の発明において、前記トルク付与手段は、前記内燃機関の始動要求に応じて前記トルクを付与する処理としての始動アシスト処理を行なう始動アシスト手段を備えることを特徴とする。
【0027】
上記発明では、内燃機関の始動に際して上記昇圧制御手段によって昇圧された電圧を用いつつ、クランク軸にトルクを付与する処理を行なう。このため、始動発電機の体格を、発電機としての要求のみを満たすものから極力大型化しないようにすることが容易となる。
【0028】
請求項12記載の発明は、請求項11記載の発明において、前記始動アシスト手段は、前記クランク軸の回転速度が規定速度以上であることを条件に、前記昇圧制御手段によって昇圧された前記直流電圧源の電圧を利用するものであって且つ、前記クランク軸の回転速度が規定速度未満である場合、前記始動アシスト処理として、前記直流電圧源の電圧を制限しつつ前記始動発電機を電動機として利用することで、前記クランク軸にトルクを付与する制限トルク付与処理を行なう制限トルク付与手段を備えることを特徴とする。
【0029】
始動発電機を流れる電流は、直流交流変換回路によって始動発電機に印加される電圧と始動発電機の逆起電圧との差に応じたものとなる。このため、始動発電機の回転速度が過度に小さい場合には、始動発電機に過度に大きい電流が流れることで始動発電機や直流交流変換回路の信頼性の低下を招いたり、電力の浪費につながったりするおそれがある。上記発明では、こうした事態を回避すべく、制限トルク付与手段を備えた。
【0030】
請求項13記載の発明は、請求項11または12記載の発明において、前記始動アシスト手段は、前記始動アシスト処理の実行期間の長さを前記バッテリの充電率が高いほど長く設定する可変手段を備えることを特徴とする。
【0031】
実行期間が長いほど、始動アシスト処理に要求される電力量が多くなる。このため、バッテリの充電率が低いにもかかわらず実行期間を過度に長くする場合には、始動アシスト処理によって消費される電力量が過度に大きくなり、ひいてはバッテリを電源とする電子機器の駆動に支障をきたすことが懸念される。この点、上記発明では、実行期間の長さを充電率に応じて定めることで、こうした事態を回避しつつも実行期間を極力長く設定することができる。
【0032】
請求項14記載の発明は、請求項11または12記載の発明において、前記内燃機関は、4ストロークエンジンであり、前記始動アシスト手段は、圧縮行程に起因して前記クランク軸に加わる負荷トルクが極大となる期間を通過したことを前記始動アシスト処理の終了条件とすることを特徴とする。
【0033】
クランク軸の回転を妨げる負荷トルクは、周期性を有して且つ圧縮行程に起因して極大となる。したがって、圧縮行程を通過した後には、小さい駆動トルクによって内燃機関の回転を安定化させることが比較的容易となる。上記発明では、この点に鑑み、上記終了条件を設定した。
【0034】
請求項15記載の発明は、請求項1〜14のいずれか1項に記載の発明において、前記直流交流変換回路の正極側および負極側の一対の入力端子のいずれかおよび前記中性点と前記バッテリの正極および負極の一対の端子とを接続する第1接続状態と、前記直流交流変換回路の一対の入力端子と前記バッテリの一対の端子とを接続する第2接続状態とを切り替える切替手段と、前記クランク軸の回転エネルギを電気エネルギに変換してバッテリに充電する場合、前記第2接続状態として且つ、前記昇圧制御手段による制御の開始に先立ち前記第1接続状態とすべく前記切替手段を操作する切替制御手段とをさらに備えることを特徴とする。
【0035】
中性点で連結された固定子巻線のそれぞれを流れる電流は、周期性を有して且つ、その位相は互いに相違する。このため、始動発電機の各端子から直流交流変換回路へと出力される電流の合計値の変動は、単一の端子からの出力電流の変動と比較して小さなものとなる。このため、直流交流変換回路の入力端子にバッテリを接続した第2接続状態において始動発電機を発電機として利用することで、第1接続状態において始動発電機を発電機として利用する場合と比較して、バッテリの入力電流のリップルを低減することができる。
【0036】
請求項16記載の発明は、請求項1〜15のいずれか1項に記載の発明において、前記昇圧制御手段は、前記直流交流変換回路を構成するスイッチング素子のうち前記直流電圧源の正極側に接続されるものおよび負極側に接続されるもののそれぞれについてのオン状態となりうる期間であるベースオン期間が、前記固定子巻線のそれぞれで互いに等しい長さとされて且つ、前記固定子巻線毎に各別の位相に設定されるに際し、前記正極側に接続されるスイッチング素子および前記負極側に接続されるスイッチング素子のいずれかを前記ベースオン期間において周期的にオンオフ操作するものであることを特徴とする。
【0037】
上記のように正弦波制御を採用せず矩形波制御を採用する場合、ベースオン期間において周期的にオンオフ操作を行なうことで、オフ操作期間に起因して電圧利用率が低下する。このため、通常、矩形波制御においてはベースオン期間のオンオフ操作は、トルクを制限する場合に行なわれる。これに対し、上記発明では、電圧利用率の低下による始動発電機のトルクの低下を直流交流変換回路の入力電圧の昇圧による始動発電機のトルクの増大が上回る制御が可能であることに着目した。これにより、部材の仕様変更や部品点数の増加を極力抑制または回避しつつ、直流交流変換回路の入力電圧をバッテリの端子電圧とする場合と比較して始動発電機のトルクを増大させることができる。
【図面の簡単な説明】
【0038】
【図1】第1の実施形態にかかるシステム構成図。
【図2】同実施形態にかかる始動発電機の生成可能なトルクと回転速度との関係を示す図。
【図3】同実施形態にかかる昇圧処理の原理を示す図。
【図4】同実施形態にかかる昇圧処理時の操作信号波形を示すタイムチャート。
【図5】同実施形態にかかる発電処理の手順を示す流れ図。
【図6】同実施形態にかかる始動アシスト処理の手順を示す流れ図。
【図7】同実施形態にかかる加速アシスト処理の手順を示す流れ図。
【図8】同実施形態にかかる燃料復帰アシスト処理の手順を示す流れ図。
【図9】同実施形態にかかるアイドルストップ制御の処理手順を示す流れ図。
【図10】同実施形態にかかるチェンジオブマインドアシスト処理の手順を示す流れ図。
【図11】第2の実施形態にかかる始動アシスト処理の手順を示す流れ図。
【発明を実施するための形態】
【0039】
<第1の実施形態>
以下、本発明にかかる始動発電機の制御装置を自動2輪車に適用した第1の実施形態について、図面を参照しつつ説明する。
【0040】
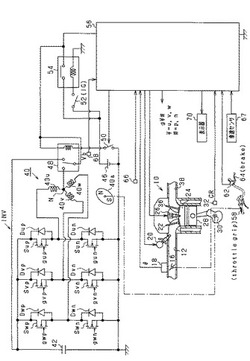
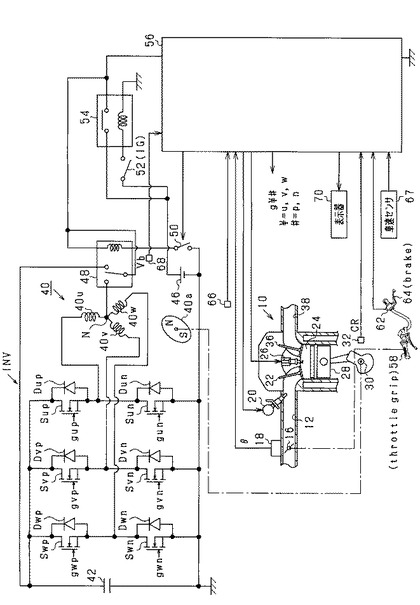
図1に、本実施形態にかかるシステム構成を示す。
【0041】
エンジン10は、単気筒の火花点火式内燃機関であり、詳しくは、4ストロークエンジンである。エンジン10の吸気通路12には、スロットルグリップ58に機械的に連結されて且つその操作に連動して通路面積を調節するためのスロットルバルブ16が設けられている。スロットルバルブ16の開口度θは、スロットルセンサ18によって検出される。吸気通路12のうちスロットルバルブ16の下流には、電子制御式の燃料噴射弁20が設けられている。
【0042】
吸気通路12は、吸気バルブ22の開動作に伴って燃焼室24と連通する。燃焼室24には、点火プラグ26が設けられている。点火プラグ26による点火操作によって、吸気通路12に吸入された空気(新気)と燃料噴射弁20から噴射された燃料との混合気が燃焼室24において燃焼に供される。この際生成される燃焼エネルギは、ピストン28の往復動を介して、クランク軸30の回転エネルギに変換される。ちなみに、クランク軸30付近には、その回転角度を検出するクランク角センサ32が設けられている。
【0043】
燃焼室24は、排気バルブ36の開動作に伴って排気通路38と連通する。これにより、燃焼室24内において燃焼に供された混合気が排気として排気通路38に排出される。なお、排気バルブ36を開閉させる手段については、デコンプ装置を備えることが望ましい。
【0044】
一方、始動発電機40は、その回転子40aがクランク軸30に機械的に連結されており、クランク軸30の回転エネルギを電気エネルギに変換する磁石式交流発電機となるものである。詳しくは、始動発電機40の回転子40aには、永久磁石が備えられている。一方、始動発電機40の固定子には、固定子巻線40u,40v,40wが設けられている。これら固定子巻線40u,40v,40wは、中性点Nにて互いに接続されている。ちなみに、本実施形態では、始動発電機40として、表面磁石同期機(SPM)を想定している。また、クランク軸30と回転子40aとは回転速度比1で機械的に連結されている一方、始動発電機40の極は4以上(たとえば12)とされている。このため、始動発電機40の電気角の1回転は、クランク軸30の1回転よりも小さい回転角度量となる。
【0045】
始動発電機40の端子(固定子巻線40u,40v,40wのうち中性点Nに接続されない側の端部)は、インバータINVに接続されている。インバータINVは、スイッチング素子S¥p,S¥n(¥=u,v,w)の直列接続体を3組備えており、これら各直列接続体の接続点が始動発電機40のU,V,W相にそれぞれ接続されている。これらスイッチング素子S¥#(¥=u,v,w;#=p,n)として、本実施形態では、NチャネルMOS電界効果トランジスタが用いられている。そして、これらにはそれぞれ、ダイオードD¥#が逆並列に接続されている。なお、ダイオードD¥#は、スイッチング素子S¥#のボディーダイオードであってもよい。
【0046】
インバータINVの一対の入力端子間には、直流電圧源(コンデンサ42)が接続されている。また、インバータINVの負極端子側(車体電位側)には、バッテリ46の負極端子が接続されている。バッテリ46は、車載補機の電源となる2次電池であり、端子電圧がたとえば18V以下(望ましくは12V前後)となるものである。バッテリ46としては、たとえば鉛蓄電池等を用いることができる。
【0047】
バッテリ46の正極端子側には、メインリレー54を介して電磁形リレー(リレー48)が接続されている。詳しくは、本実施形態では、可動鉄心形のものを例示している。リレー48は、バッテリ46の正極端子を中性点NとインバータINVの正極側の入力端子とのいずれに接続するかを切り替えるための手段である。なお、リレー48としては、通電のなされない場合にインバータINVの正極側の入力端子とバッテリ46の正極端子とを接続状態とするものであることが望ましい。リレー48のコイルの一方の端子は、開閉制御用スイッチング素子50を介して接地されており、他方の端子は、メインリレー54を介してバッテリ46の正極に接続されている。メインリレー54のコイルの一方の端子とバッテリ46の正極との間には、ユーザによって操作可能なイグニッションスイッチ52が接続されている。また、メインリレー54のコイルの他方の端子は、接地されている。これにより、イグニッションスイッチ52がオン操作されることで、メインリレー54は閉状態となる。
【0048】
制御装置56は、上記エンジン10や始動発電機40を制御対象とする制御装置である。なお、制御装置56とインバータINVとは、同一基板に形成されることが望ましい。制御装置56は、スロットルセンサ18や、クランク角センサ32に加えて、始動発電機40の回転角度を検出するたとえばホール素子等の回転角度センサ66、車速を検出する車速センサ67、バッテリ46の端子電圧を検出する電圧センサ68等の検出値を取り込む。また、キャンセルスイッチ62(後述)の操作信号を取り込む。そして、これらに基づき燃料噴射弁20や点火プラグ26を操作することでエンジン10の出力トルクを制御する。また、スイッチング素子S¥#の操作信号g¥#によってインバータINVのスイッチング素子S¥#を操作することで始動発電機40を制御する。
【0049】
始動発電機40は、基本的には、上述したようにクランク軸30の回転エネルギを電気エネルギに変換してバッテリ46に供給するための発電機として機能する。ただし、始動発電機40は、エンジン10の始動等にも利用される。ここで、自動2輪車においては、始動発電機40の搭載スペースの制約が特に厳しいものとなっている。たとえば、スクータ等の小型の自動2輪車においては、始動発電機40は、φ130mm程度で軸方向寸法が40mm程度以下の体格に制限される。このため、始動発電機40を電動機として利用する際の生成可能トルクが制限され、ひいては始動性の低下等が懸念される。以下、これについて説明する。
【0050】
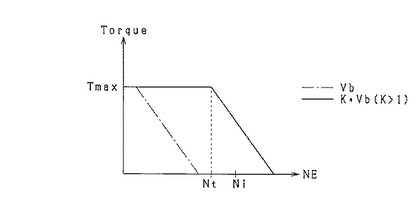
図2に、一点鎖線にて、インバータINVの一対の入力端子間に端子電圧Vbのバッテリ46を接続した場合の始動発電機40の生成可能トルクと回転速度NEとの関係を示す(上述したように、クランク軸30と始動発電機40の回転子40aとが回転速度比1となるようにして機械的に連結されているため、エンジン10の回転速度NEは始動発電機40の回転速度でもある)。
【0051】
図示されるように、始動発電機40によって生成可能なトルクは、低速度領域において上限値Tmaxで一定となって且つ、それ以外の領域において回転速度NEの上昇とともに低下する。これは、基本的には、始動発電機40に流し込める電流が「(Vm−E)/√{r^2+(ωL)^2}」に比例することによる。ここで、回転子40aの永久磁石による磁束が固定子巻線40u,40v,40wに生じさせる逆起電力E、印加電圧Vm、始動発電機40の抵抗r、インダクタンスLおよび回転速度に応じた周波数ωを用いた。このため、回転速度NEが上昇するにつれて始動発電機40によって生成可能なトルクTが低下する。ここで、本実施形態では、トルクがゼロとなる上限速度は、アイドリング時の目標回転速度Ni(たとえば1300〜1800rpm、より望ましくは、1400〜1700rpm)よりも小さくなっている。このため、始動発電機40は、エンジン10の燃焼制御を行なわないなら、回転速度NEをゼロから目標回転速度Niまで上昇させることができないものとなっている。
【0052】
一方、速度が低い領域において上限値Tmaxで固定されるのは、始動発電機40の構造上、流せる電流に発熱に起因した限界があるためである。この電流値は、本実施形態では、電動機の機能を兼ねることで始動発電機40が大型化することを極力回避した設計とすることに起因している。
【0053】
すなわち、発電機としての要求を満たす上では、発電量が小さくなるアイドリング運転時において、バッテリ46に所定の電圧(たとえば14V)を印加して且つ所定量の電流(たとえば1A)を流せるようにする必要がある。ここで、発電電圧や発電電流を増大させるうえでは、固定子巻線40u,40v,40wの巻数を増加させることが有効である一方、巻数の増加は、始動発電機40の大型化を招く。このため、発電機としての要求を満たす上では、固定子巻線40u,40v,40wの巻数を細くして且つそれらの線径を小さくする必要がある。
【0054】
これに対し、電動機としての要求を満たす上では、生成可能なトルクを大きくすべく流せる電流を大きくする必要が生じる。そして流せる電流を大きくする上では、固定子巻線40u,40v,40wの線径を太くすることが必要である。
【0055】
このため、発電機としての要求と電動機としての要求との双方を満たす上では、始動発電機40を大型化する必要が生じる。しかし、電動機としての機能を兼ねることで始動発電機40が大型化することは望ましくない。そこで、発電機としての要求のみを満たすうえでの体格と比較して体格の大型化を無視しうるレベルに抑えるべく、固定子巻線40u,40v,40wの線径を制限して設計したため、発熱限界に起因した流せる電流(連続定格電流)の上限が小さくなり、ひいては回転速度NEがある値以上小さくなっても生成可能な最大トルクに変化のない領域が生じている。
【0056】
ここで、エンジン10の始動時においてクランク軸30を回転させるに際してクランク軸30の回転を妨げるトルク(負荷トルク)は、周期性を有し、エンジン10の圧縮上死点に起因して極大となる。そして本実施形態では、停止中のエンジン10を回転させる処理の開始時に上記極大値に打ち勝つために要求されるトルクが上限値Tmaxよりも大きいものとなっている。ここで、負荷トルクに打ち勝つのに要する始動発電機46の出力トルクは、回転速度NEがゼロのときよりもある程度高回転となるときの方が、クランク軸30およびピストン28等の運動エネルギが大きくなっているために小さくなる。特に、本実施形態では、回転速度NEがゼロよりも大きくて且つ目標回転速度Niよりも小さい領域において圧縮行程に伴う極大値を有した負荷トルクにもかかわらず正回転を継続させることが可能なトルクを生成可能な設定となっている。
【0057】
ただし、この場合、エンジン10のクランク軸30の停止角度によっては、圧縮行程となるまでの回転角度が小さいため、クランク軸30の回転速度を十分に加速することができず、ひいては始動発電機46によって圧縮行程に起因した負荷トルクに打ち勝つトルクを生成できない。このため、こうした領域では、クランク軸30を一旦逆回転させその後クランク軸30を正回転させることで、圧縮行程における回転速度NEを上昇させるいわゆるスイングバック処理を行なうこととなる。
【0058】
しかし、インバータINVの入力電圧をバッテリ46の端子電圧Vbとした場合、始動発電機46の生成可能なトルクが低下し始める回転速度NEが低いため、圧縮行程に達する以前に十分に加速するうえでは、逆回転させる量を大きくする等、スイングバックに要する時間が伸長する。
【0059】
そこで本実施形態では、中性点Nにバッテリ46の正極を接続することでインバータINVの入力電圧を昇圧し、図2に実線にて示すようにトルクの生成可能領域を拡大する。
【0060】
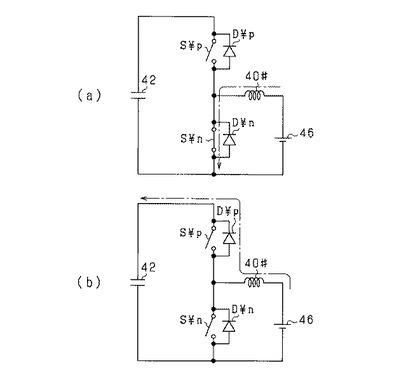
図3に、昇圧処理の原理を示す。この昇圧処理は、固定子巻線40¥(¥=u,v,w)を昇圧チョッパ回路のリアクトルとして利用することでバッテリ46の端子電圧Vb対して昇圧した電圧をコンデンサ42に印加するものである。すなわち、図3(a)に示すようにスイッチング素子S¥nをオン操作することで、バッテリ46、固定子巻線40¥、およびスイッチング素子S¥nを備えるループ経路に電流が流れ、固定子巻線40¥にエネルギが蓄積される。そして、図3(b)に示すように、スイッチング素子S¥nをオフ操作することで、バッテリ46、固定子巻線40¥、ダイオードD¥pおよびコンデンサ42を備えるループ経路に電流が流れ、固定子巻線40¥に蓄積されたエネルギがコンデンサ42に出力される。
【0061】
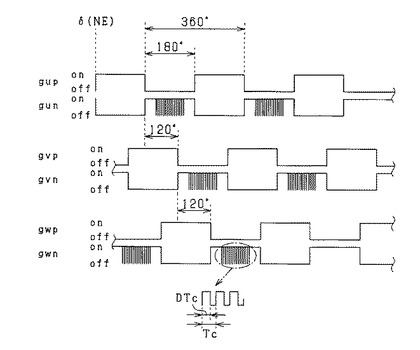
具体的には、本実施形態では、図4に示すように、矩形波制御(180°通電処理)に従ってスイッチング素子S¥#を操作するに際し、下側アームのスイッチング素子S¥nのオンとすべき期間(ベースオン期間)において、そのオンとすべき期間(電気角で180°の期間)よりも短い期間Tcを周期としてスイッチング素子S¥nをオン・オフ操作する。ここで、180°通電処理は、スイッチング素子S¥pとスイッチング素子S¥nとを電気角の180°毎に交互にオン状態として且つ、相毎にオン操作の位相が「120°」ずつずれたものである。
【0062】
これにより、周期Tcに対するオン期間の時間比率(デューティD)によって昇圧電圧を制御することができる。ここで、180°通電処理を採用したのは、第1に、制御の簡素化のためであり、第2に、電圧利用率が最大となるためである。すなわち、本実施形態では、始動時等、限られた期間に始動発電機40を電動機として利用するに過ぎず、また単気筒の内燃機関を主機としていることもあり、トルクリップル等が問題となることはない。むしろここで要求されるのは、始動発電機40によって生成可能な最大トルクを実現することである。このため、電圧利用率が最大となる180°通電処理を採用した。
【0063】
ちなみに、180°通電処理においてもスイッチング状態の切替位相を操作することでトルクは変動しうる。本実施形態では、最大のトルクに開ループ制御すべく、スイッチング状態の切替位相δ(インバータINVの出力電圧の位相)を回転速度NEに応じて操作する。
【0064】
また、上記のように、下側アームのスイッチング素子S¥nをオン・オフ操作する(PWM処理する)場合には、180°通電処理の本来の電圧利用率と比較して実際の電圧利用率が低下する。実際、正弦波制御を行わない簡易な制御器において120°通電処理や180°通電処理等を用いる場合、これら方式に従ってオンとすべき期間においてPWM処理することは、通常、電流を制限する目的でなされている。しかし、本実施形態では、PWM処理によるトルクの低減効果を昇圧によるトルクの増大効果が上回るように、デューティDおよびPWM処理の位相を設定することで、PWM処理によってトルクを増大させている。
【0065】
なお、インバータINVとバッテリ46との間に昇圧チョッパ回路を別途設けるなら、インバータINVの入力電圧をバッテリ46の電圧よりも上昇させて且つ、180°通電処理の電圧利用率を実現することができる。しかし、これは、上述した搭載スペースの制約を満たすことを困難としうる。また、エンジン10の始動等、車両の走行利用期間に対してクランク軸30を正回転させるためのトルクを付与する電動機が必要とされる期間が極めて短いにもかかわらず、この僅かな期間のために新たなハードウェア手段を搭載することとなり、望ましくない。
【0066】
上記昇圧処理により、本実施形態では、先の図2に実線にて示すように、生成可能な最大トルクを上限値Tmaxとすることのできる領域を回転速度Ntまで拡大することができ、ひいてはエンジン10の始動に要する時間を短縮することができる。そして、トルクを増大することができることから、本実施形態では、始動時以外においてもいくつかのエンジン10のアシスト処理を行なう。
【0067】
以下、始動発電機40の制御に関し、「発電処理」、「始動アシスト処理」、「加速アシスト処理」、「燃料復帰アシスト処理」、および「チェンジオブマインドアシスト処理」の順に説明する。
【0068】
「発電処理」
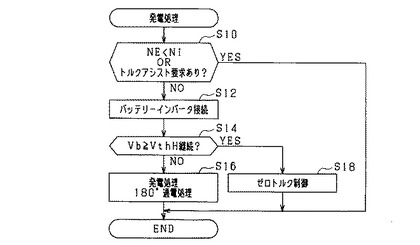
図5に、本実施形態にかかる発電処理の手順を示す。この処理は、制御装置56によってたとえば所定周期で繰り返し実行される。
【0069】
この一連の処理では、まずステップS10において、回転速度NEが目標回転速度Niよりも小さいことと後述するトルクアシスト処理の実行要求が生じていることとについて、それらの論理和が真であるか否かを判断する。そしてステップS10において否定判断される場合、ステップS12において、開閉制御用スイッチング素子50を通じてリレー48を操作することで、バッテリ46の正極側をインバータINVの正極側の入力端子に接続する。これは、始動発電機40の発電処理時において、インバータINVの一対の入力端子を介して始動発電機40の発電エネルギをバッテリ46に出力するための設定である。ここで、中性点Nを介してバッテリ46の充電を行わないのは、インバータINVの入力端子を介してバッテリ46に電力を出力する場合、3相のそれぞれの電流の合成電流がバッテリ46に出力されることから、バッテリ46への充電電流のリップルを低減することができることなどのためである。
【0070】
続くステップS14においては、バッテリ46の端子電圧Vbが上限電圧VthH以上である状態が継続するか否かを判断する。この処理は、バッテリ46への充電が可能であるか否かを判断するためのものである。ここで、バッテリ46の端子電圧Vbは、バッテリ46の充電率(満充電に対する実際の充電量:SOC)と相関を有する物理量である。ちなみに、バッテリ46の充電率は、開放端電圧(OCV)との間により強い相関を有するものであるが、ここでは、簡易的に端子電圧Vb(通常、閉路端電圧となる)を用いて充電率を定量化している。なお、上記上限電圧VthHは、バッテリ46が満充電状態であるか否かを判断するための値に設定されている。また、上限電圧VthH以上である状態の継続を問題とすることの理由については、後述の処理の説明時に説明する。
【0071】
上記ステップS14において否定判断される場合、バッテリ46が未だ満充電状態でないと判断し、ステップS16において発電処理を行なう。ここでは、先の図4に例示した180°通電処理を行なう。ただし、この際、下側アームのスイッチング素子S¥nのPWM処理を行わない。なお、発電処理の実行時においてバッテリ46の端子電圧Vbが上限電圧VthH以上となると判断される場合、インバータINVの出力電圧の位相(スイッチング状態の切替位相)を進角させる処理を行なうことで発電量を低減させる。そして、位相の進角処理によってもバッテリ46の端子電圧Vbが上限電圧VthH以上となる状態が継続されることで、上記ステップS14において肯定判断されることとなる。
【0072】
上記ステップS14において肯定判断される場合、バッテリ46が満充電状態にあると判断し、ステップS18においてゼロトルク制御を行なう。これは、エネルギの浪費を極力抑制するための設定である。すなわち、本実施形態では、ハードウェア手段の簡素化のため、インバータINVと始動発電機40との間を遮断する手段や、クランク軸30と回転子40aとの機械的な連結を解除する手段を備えていない。このため、インバータINVのスイッチング素子S¥#を全てオフとしたとしても、始動発電機40が回転することで、固定子巻線40¥を鎖交する永久磁石の鎖交磁束数が周期的に変動することに起因した逆起電圧によって、ダイオードD¥#を介して電流が流れ、ひいてはクランク軸30に負荷トルクが付与されることでエンジン10の燃料消費量が増大する。また、上側アームのスイッチング素子S¥pの全てや下側アームのスイッチング素子S¥nの全てをオン操作したとしても、クランク軸30に負荷トルクが付与されることでエンジン10の燃料消費量が増大する。そのため、ステップS18では、始動発電機40の生成トルクがゼロとなるようにインバータINVを操作する。ちなみに、この際、インバータINVを操作することなどに起因して電力が消費されるが、これによる電力消費量は、上記負荷トルクによる燃料消費量の増大と比較して、巨視的な時間スケールにおける燃料消費率を低減しうるものである。
【0073】
なお、上記ステップS16,S18の処理が完了する場合や、ステップS10において否定判断される場合には、この一連の処理を一旦終了する。
【0074】
「始動アシスト処理」
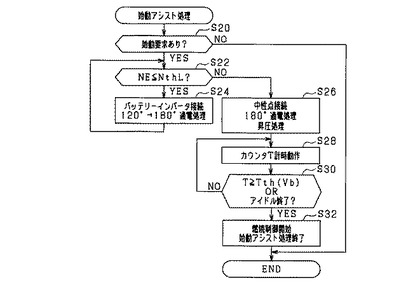
図6に、本実施形態にかかる始動アシスト処理の手順を示す。この処理は、制御装置56によってたとえば所定周期で繰り返し実行される。
【0075】
この一連の処理では、まずステップS20において、始動要求があるか否かを判断する。これは、たとえばイグニッションスイッチ52と連動して操作される図示しない起動スイッチがオンとされるか否かに基づき判断すればよい。
【0076】
ステップS20において肯定判断される場合、ステップS22においてエンジン10の回転速度NEが下限速度NthL以下であるか否かを判断する。この処理は、昇圧処理を行なうか否かを判断するためのものである。すなわち、インバータINVの入力電圧をバッテリ46の端子電圧Vbとした場合の始動発電機40を流れる電流の上限値は、先の図2に示したように、発熱限界によって規定される最大トルクに対応するものであるため、始動発電機40の低速領域においては一定値(連続定格電流)となる。このため、低速領域では、始動発電機40に流れる電流を上限値に制御すべく、始動発電機40に印加する電圧の実効値を制限する。このため、この領域においては、昇圧処理を行わない。なお、下限速度NthLは、インバータINVの入力電圧をバッテリ46の端子電圧Vbとした場合の始動発電機40の生成可能トルクが上限値Tmaxから低下し始める回転速度程度に設定する。
【0077】
ステップS22において肯定判断される場合、ステップS24において、開閉制御用スイッチング素子50を通じてリレー48を操作することで、バッテリ46の正極側をインバータINVの正極側の入力端子に接続する。また、ステップS24では、回転速度が低い領域では、周知の120°通電処理を行ない、回転速度の上昇に伴って、180°通電処理に移行させる。なお、始動発電機40を流れる電流を上限値に高精度に制御する上では、120°通電処理や180°通電処理によってオンとすべき期間においてPWM処理を実行することが望ましい。また、このステップS24においては、クランク軸30を逆回転させるスイングバック等を適宜利用することで、圧縮行程に起因してクランク軸30の負荷トルクが極大となるタイミングにおいて回転速度NEがある程度高回転となるように制御する。
【0078】
一方、ステップS22において否定判断される場合、ステップS26に移行する。ここでは、開閉制御用スイッチング素子50を通じてリレー48を操作することで、バッテリ46の正極側を中性点Nに接続し、先の図4に示した態様にてスイッチング素子S¥#を操作する。
【0079】
続くステップS28においては、昇圧処理の開始からの時間を計時するカウンタの計時動作を行なう。そして、ステップS30においては、カウンタ値Tが閾値時間Tth以上となることとスロットルグリップ58の操作に従ってアイドル制御が終了することとについて、それらの論理和が真であるか否かを判断する。この処理は、燃焼制御を開始し、また昇圧処理を停止するか否かを判断するためのものである。ここで、本実施形態では、閾値時間Tthを、バッテリ46の端子電圧Vbが高いほど長く設定する。ここで、端子電圧Vbは、バッテリ46の充電率を定量化したものであり、この処理によって、目標回転速度Niとなった後も始動発電機40のみによってクランク軸30を回転させる処理を許容し、バッテリ46の充電率が高いほど燃焼制御の開始までの時間を伸長させる。これは、長期的な時間スケールにおける燃料消費率を低減するための設定である。
【0080】
すなわち、エンジン10の燃料消費率は、回転速度およびトルクに応じて定まる動作点毎に変動し、特に、低負荷低回転速度領域においては高いものとなる。このため、燃料消費率が高い領域において燃焼制御を極力行わないようにするためには、エンジン10の始動に際して始動発電機40によってクランク軸30を回転させる期間を長くすることが望ましい。加えて、エンジン10の回転速度NEが目標回転速度Niよりも高い領域においては燃料消費率の低下傾向があるものの、この時点でバッテリ46が満充電に達すると、先の図5のステップS18に示したゼロトルク制御によってバッテリ46の電力が浪費されることとなる。このため、バッテリ46の充電率をある程度低下させることで、ゼロトルク制御の開始までの期間を伸長させることが燃料消費率を改善することにつながる。
【0081】
上記ステップS30において肯定判断される場合、ステップS32において燃焼制御を開始し、また、始動アシスト処理を終了することで始動発電機40を発電機として利用するモードに切り替える。なお、リレー48の切り替えは、昇圧処理を停止することでコンデンサ42の充電電圧を規定電圧以下とした後、リレー48を流れる電流が規定値以下となることを条件に行なうことが望ましい。
【0082】
上記ステップS32の処理が完了する場合や、ステップS20において否定判断される場合には、この一連の処理を一旦終了する。
【0083】
「加速アシスト処理」
この処理は、ユーザによって車両を駆動するトルクの増大要求がなされる場合に、それに迅速に応えるために始動発電機40を電動機として利用するものである。なお、加速アシスト処理は、先の図1に示したキャンセルスイッチ62が操作される場合には、実行されない。
【0084】
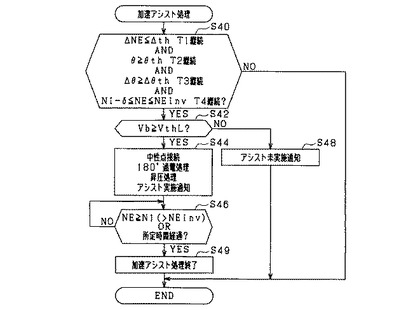
図7に、本実施形態にかかる加速アシスト処理の手順を示す。この処理は、キャンセルスイッチ62によってこの処理を行わないことがユーザによって選択されていない場合に、制御装置56によってたとえば所定周期で繰り返し実行される。
【0085】
この一連の処理では、まずステップS40において、以下の(ア)〜(ウ)の条件の論理積が真であるか否かを判断する。
(ア)エンジン10の回転速度NEの変動量ΔNEが規定量Δth以下である状態が規定時間T1以上継続していること。
(イ)スロットルバルブ16の開口度θが閾値開度θth以上である状態が規定時間T2以上継続していること。
(ウ)スロットルバルブ16の開口度θの変化速度Δθが閾値速度Δθth以上である状態が規定時間T3以上継続していること。
(エ)回転速度NEが「Ni−δ」以上であって且つ規定速度NEinv以下である状態が既定時間T4以上継続していること。
【0086】
この処理は、加速アシスト処理を実行するか否かを判断するためのものである。また、上記(ア)〜(ウ)の条件は、ユーザによって車両を駆動するトルクの増大要求がなされていると判断するための条件である。ここで、規定時間T2,T3は、開口度θが閾値開度θth以上との判断や、変化速度Δθが閾値速度Δθth以上であるとの判断がノイズによって誤ってなされることを抑制するためのものである。また、上記(エ)の条件は、本実施形態では、目標回転速度Niよりも高回転速度領域において始動発電機40のトルクを大きくすることができないことに鑑み、加速アシスト処理をアイドル制御からの駆動トルクの増大要求時に限るために設けたものである。ここで、規定速度NEinvは、始動発電機40によってアシストトルクを生成できなくなる回転速度よりも低い回転速度に設定される。なお、「Ni−δ」以上との条件は、目標回転速度Niよりも過度に低い領域でアシスト処理を行わないためのものである。
【0087】
上記論理積が真である場合、ステップS42において、バッテリ46の端子電圧Vbが閾値電圧VthL以上であるか否かを判断する。この処理は、バッテリ46の充電率が低い場合、加速アシスト処理を禁止するためのものである。なお、閾値電圧VthLは、加速アシスト処理によってバッテリ46の電気エネルギが消費されることで、バッテリ46が車両の走行にとって必要な補機(燃料噴射弁20、点火プラグ26)等に必要な電力を供給することが困難となることのない電圧の下限値に基づき設定されている。
【0088】
そして、ステップS42において肯定判断される場合、ステップS44において、加速アシスト処理を行なう。すなわち、開閉制御用スイッチング素子50を通じてリレー48を操作することで、バッテリ46の正極側を中性点Nに接続し、先の図4に示した態様にてスイッチング素子S¥#を操作する。また、先の図1に示した表示器70を用いて、アシスト処理を実施していることを通知する。この処理は、ユーザに違和感を与えないために行われるものである。すなわち、加速アシスト処理は、キャンセルスイッチ62によってキャンセルすることができることから、ユーザが自発的に選択することで行われることではある。このため、一見すると、ユーザは加速アシスト処理を実施するに際して心の準備ができており、これを敢えてユーザに知らせる必要はないと考えられなくもない。しかし、自動2輪車においては、スロットルグリップ58の操作と駆動トルクとの対応関係が顕著であり、ユーザはスロットルグリップ58の操作と駆動トルクとの関係についてエンジン10のみによって駆動トルクが生じる場合の感覚を固定観念として形成しやすい。このため、加速アシスト処理が実施されることで、ユーザに違和感を与える懸念があることが見出された。ちなみに、この懸念は、スロットルグリップ58とスロットルバルブ16とが機械的に連結された本実施形態にかかるシステムにおいて特に顕著である。
【0089】
この加速アシスト処理は、回転速度N1が上記規定速度N1に達するか、所定時間が経過するまで実行される(ステップS46)。ここで、規定速度N1(>NEinv)は、始動発電機40によってアシストトルクを生成できなくなる回転速度N1に設定される。また、所定時間については、固定値でもよいが、端子電圧Vbが高いほど長くすることで、充電率が高いほどアシスト処理の実行可能期間を長くしてもよい。そして、回転速度N1が規定速度N1に達するか、所定時間が経過すると、ステップS49において、加速アシスト処理を終了することで、始動発電機40を用いた発電処理へと移行する。
【0090】
一方、上記ステップS42において否定判断される場合には、ステップS48において、バッテリ46の充電率が低いために加速アシスト処理を実行できない旨、上記表示器70を用いて通知する。これは、ユーザに、加速アシスト処理を実行する機能の故障なのかそうでないのかを識別可能とするための設定である。
【0091】
なお、ステップS48、S49の処理が完了する場合や、ステップS40において否定判断される場合には、この一連の処理を一旦終了する。
【0092】
「燃料復帰アシスト処理」
この処理は、燃料カット制御からの復帰(燃焼制御の再開)に際してクランク軸30に始動発電機40のトルクを付与するものである。この処理は、燃焼制御を再開させる回転速度を低下させ、燃料消費率を低減するためのものである。すなわち、燃料復帰アシスト処理を行わない場合、エンジン10の応答性等を考慮し、再開させる回転速度をアイドル時の目標回転速度Niよりも十分に高くする必要が生じる。なお、燃料復帰アシスト処理は、先の図1に示したキャンセルスイッチ62が操作される場合には、実行されない。
【0093】
図8に、本実施形態にかかる燃料復帰アシスト処理の手順を示す。この処理は、キャンセルスイッチ62によってこの処理を行わないことがユーザによって選択されていない場合に、制御装置56によってたとえば所定周期で繰り返し実行される。
【0094】
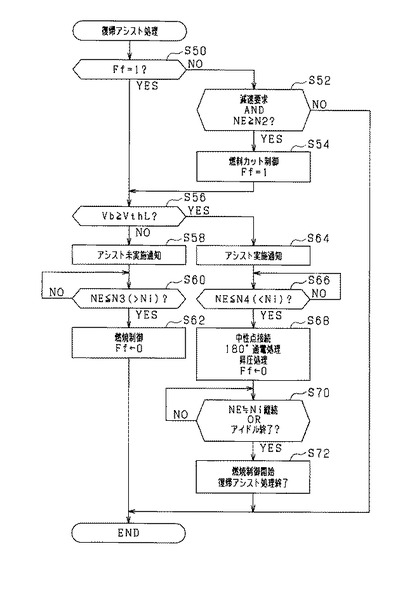
この一連の処理では、まずステップS50において、燃料カット制御が実施されている旨を示す燃料カットフラグFfが「1」であるか否かを判断する。そして、ステップS50において否定判断される場合、ステップS52において、車両を駆動するトルクに関するユーザの要求が所定以下である(減速要求)ことと回転速度NEが開始速度N2以上であることとについて、それらの論理積が真であるか否かを判断する。この論理積条件が燃料カット制御の実行条件である。ここで、減速要求の判断は、たとえばスロットルバルブ16の開口度θがゼロである場合に減速要求ありとすればよい。また、開始速度N2は、燃料カット制御を実行してもエンジンストールすることなく燃焼制御の再開によって回転速度NEを目標回転速度Niとすることができると想定される回転速度に設定される。
【0095】
ステップS52において肯定判断される場合、ステップS54において、燃料カット制御を実行するとともに、燃料カットフラグFfを「1」とする。
【0096】
そして、ステップS54の処理が完了する場合や、上記ステップS50において肯定判断される場合、ステップS56において、バッテリ46の端子電圧Vbが閾値電圧VthL以上であるか否かを判断する。この処理は、バッテリ46の充電率が低い場合、燃料復帰アシスト処理を禁止するためのものである。なお、閾値電圧VthLは、燃料復帰アシスト処理によってバッテリ46の電気エネルギが消費されることで、バッテリ46が車両の走行にとって必要な補機(燃料噴射弁20、点火プラグ26)等に必要な電力を供給することが困難となることのない電圧の下限値に基づき設定されている。
【0097】
そしてステップS56において否定判断される場合、ステップS58において、アシスト処理を実行しない旨、表示器70を用いて通知する。この処理は、先の図7のステップS48の処理と同趣旨である。そして、回転速度NEが復帰回転速度N3以下となるまで待機する(ステップS60)。ここで、復帰回転速度N3は、アイドル時の目標回転速度Niよりも高い回転速度に設定されている。そして、復帰回転速度N3以下となることで、ステップS62に移行し、燃焼制御を再開して燃料カットフラグFfを「0」とする(ステップS62)。
【0098】
これに対し、上記ステップ56において肯定判断される場合、ステップ64においてアシスト処理を実行する旨、表示器70を用いて通知する。この処理は、先の図7のステップS44における通知処理と同趣旨である。そして、回転速度NEが復帰回転速度N4となるまで待機する(ステップS66)。ここで、復帰回転速度N4は、目標回転速度Ni以下の回転速度に設定されている。そして、復帰回転速度N4以下となることで、ステップS68に移行し、燃料復帰アシスト処理を実行する。すなわち、開閉制御用スイッチング素子50を通じてリレー48を操作することで、バッテリ46の正極側を中性点Nに接続し、先の図4に示した態様にてスイッチング素子S¥#を操作する。また、燃料カットフラグFfを「0」とする。この処理は、エンジン10の回転速度NEが目標回転速度Niで安定することと、スロットルグリップ58の操作に従ってアイドル制御が終了することとについて、それらの論理和が真となるまで実行される(ステップS70)。ここで、スロットルグリップ58の操作に従ってアイドル制御が終了することは、車両の駆動トルクに関するユーザの要求が増大すると判断される条件である。そして、論理和が真となると、ステップS72においてエンジン10の燃焼制御を開始し、燃料復帰アシスト処理を終了することで始動発電機40を用いた発電処理に移行する。
【0099】
なお、上記ステップS62,S72の処理が完了する場合や、ステップS52において否定判断される場合には、この一連の処理を一旦終了する。
「チェンジオブマインドアシスト処理」
これは、アイドルストップ制御によってエンジン10の燃焼制御が停止された直後にユーザによる再発進の意思が確認される場合にこれに速やかに応じるためのものである。この処理を説明するに先立って、まず本実施形態にかかるアイドルストップ制御について説明する。
【0100】
図9に、本実施形態にかかるアイドルストップ制御の処理手順を示す。この処理は、制御装置56によって、たとえば所定周期でくり返し実行される。
【0101】
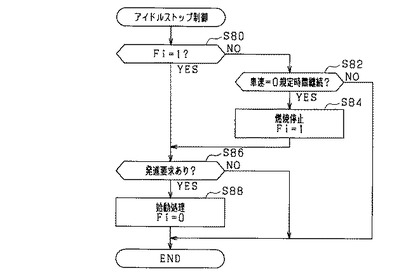
この一連の処理では、まずステップS80において、エンジン10の自動停止処理がなされている旨の停止フラグFiが「1」であるか否かを判断する。そして、ステップS80において否定判断される場合、ステップS82において、車速がゼロの状態が規定時間継続したか否かを判断する。この処理は、エンジン10の自動停止処理を実行するか否かを判断するためのものである。ここで、車速がゼロの状態が規定時間継続するとの条件は、ユーザに停車意思があると判断する条件である。そして、ステップS82において肯定判断される場合、ステップS84において、エンジン10の燃焼制御を停止するとともに、停止フラグFiを「1」とする。
【0102】
これに対し、上記ステップS80において肯定判断される場合や、ステップS84の処理が完了する場合には、ステップS86において、発進要求があるか否かを判断する。これは、たとえばスロットルバルブ16の開口度θが増大するか否かによって判断すればよい。そして、発進意思があると判断される場合、ステップS88において、自動始動処理を行なうとともに、停止フラグFiを「0」とする。ちなみに、自動始動処理は、先の図6に示した処理となる。
【0103】
なお、上記ステップS88の処理が完了する場合や、ステップS82,S86において否定判断される場合には、この一連の処理を一旦終了する。
【0104】
図10に、本実施形態にかかるチェンジオブマインドアシスト処理の手順を示す。この処理は、制御装置56によって、たとえば所定周期で繰り返し実行される。
【0105】
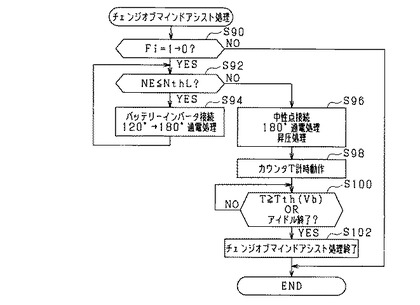
この一連の処理では、まずステップS90において停止フラグFiが「1」から「0」に切り替わるか否かを判断する。この処理は、チェンジオブマインドアシスト処理を実行するか否かを判断するためのものである。
【0106】
ステップS90において肯定判断される場合、ステップS92において、回転速度NEが下限速度NthL以下であるか否かを判断し、下限速度NthL以下である場合、ステップS94において、先の図6のステップS24と同様の処理を行なう。これに対し、回転速度NEが下限速度Nthを上回る場合、ステップS96に移行し、開閉制御用スイッチング素子50を通じてリレー48を操作することで、バッテリ46の正極側を中性点Nに接続し、先の図4に示した態様にてスイッチング素子S¥#を操作する。ちなみに、アイドルストップ制御によってエンジン10の燃焼制御が停止された直後にユーザによる再発進の意思が確認される場合、発進の意思が確認された直後においてもステップS92において否定判断されることとなる。
【0107】
そして、ステップS98では、ステップS96の処理の実行期間を計時するカウンタの計時動作を行なう。そして、ステップS100においては、カウンタ値Tが閾値時間Tth以上となることとスロットルグリップ58の操作に従ってアイドル制御が終了することとについて、それらの論理和が真であるか否かを判断する。この処理は、燃焼制御を開始し、また昇圧処理を停止するか否かを判断するためのものである。ここで、本実施形態では、先の図6のステップS30と同様の趣旨で、閾値時間Tthを、バッテリ46の端子電圧Vbが高いほど長く設定する。そして、ステップS100において肯定判断される場合、ステップS102において、チェンジオブマインドアシスト処理を終了する。
【0108】
なお、上記ステップS102の処理が完了する場合や、ステップS90において否定判断される場合には、この一連の処理を一旦終了する。
上記チェンジオブマインドアシスト処理によれば、アイドルストップ制御によってエンジン10の燃焼制御が停止された直後にユーザによる再発進の意思が確認される場合、始動発電機40によるトルクによってクランク軸30の回転速度NEが目標回転速度Niにて安定化される。この処理は、インバータINVの入力電圧を端子電圧Vbとした場合にトルクが生成できなくなる回転速度領域におけるものであることから、昇圧制御を行わない場合にはなしえなかったものである。
<第2の実施形態>
以下、第2の実施形態について、先の第1の実施形態との相違点を中心に図面を参照しつつ説明する。
【0109】
本実施形態では、先の第1の実施形態と比較して排気量が大きいエンジン10を想定する。この場合、昇圧処理を行なったとしても、始動発電機40は、燃焼制御を行なうことなくアイドル時の目標回転速度Niを維持するために要するトルクを生成できない。しかし、この場合であっても、昇圧を利用した始動アシスト処理を行なうことで、発電機としての用途が主の始動発電機40の設計変更をすることなく、エンジン10を始動させることができる。
【0110】
図11に、本実施形態にかかる始動アシスト処理の手順を示す。この処理は、制御装置56によってたとえば所定周期で繰り返し実行される。なお、図11において、先の図6に示した処理に対応するものについては、便宜上同一のステップ番号を付している。
【0111】
この一連の処理では、圧縮上死点を通過することを、始動アシスト処理の終了条件とする(ステップS30a)。そして、始動アシスト処理が終了すると、ステップS32において、燃焼制御を開始する。なお、ここでの燃焼制御の開始とは、点火プラグ26による点火操作の開始(圧縮上死点から数°遅角したタイミングでの点火)を意味し、燃料噴射弁20を介した燃料の噴射に関しては、始動アシスト処理の実行期間において開始される。これにより、圧縮行程を通過した後の最初の燃焼行程において混合気を燃焼させることができる。もっとも、これに代えて、始動アシスト処理の終了後の最初の圧縮行程に先立って燃料噴射を開始して且つ、圧縮行程において点火操作を開始してもよい。
<その他の実施形態>
なお、上記各実施形態は、以下のように変更して実施してもよい。
【0112】
「燃料復帰アシスト手段について」
トルクアシストを実施する場合の復帰回転速度N4としては、アイドリング時の目標回転速度Ni以下の回転速度に限らず、たとえば目標回転速度Niよりも僅かに高い回転速度であってもよい。また、復帰回転速度を1段階で変化させる代わりに、充電率に応じて連続的に変更してもよい。この際、充電率が低い場合には、燃料復帰アシスト処理を要求しない値まで復帰回転速度を上昇させることが望ましい。
【0113】
上記実施形態では、エンジン10の回転速度NEがアイドリング時の目標回転速度Niにて安定することを条件に燃焼制御を開始したがこれに限らない。たとえば燃焼によってエンジン10の自立運転が可能となると想定される回転速度に達することを条件に燃焼制御を開始してもよい。なお、この場合、回転速度NEがアイドリング時の目標回転速度Niに達する前であっても、燃焼制御が開始されることでトルクアシストを終了してもよい。
【0114】
なお、減速回生時においてはバッテリ46が充電される一方、フューエルカット制御は減速回生時においてなされるものであることに鑑みれば、減速回生時の充電エネルギ量の消費に制限する条件で、充電率に関係なくフューエルカット制御からの復帰に際し常にトルクアシストを実施してもよい。
また、駆動トルクに関するユーザの要求が所定以下であるか否かの判断としては、スロットルバルブ16の開口度θに基づくものに限らず、たとえば先の図1に示すブレーキ62の操作によって判断するものであってもよい。
【0115】
「アイドリングストップ制御について」
実行条件としては、車速がゼロとなることを条件とすることなく、ゼロよりも大きい規定速度以下となることを条件としてもよい。
【0116】
上記実施形態では、スロットルグリップ58の操作(スロットルバルブ16の開口度θの変化)によって発進意思の有無を判断し、これに基づき自動始動処理を行ったが、これに限らない。たとえば、ユーザによって操作可能な自動始動指示スイッチを別途備え、このスイッチの操作に基づき発進意思の有無を判断し、自動始動処理を行ってもよい。
【0117】
「チェンジオブマインド手段について」
トルクアシストの実行期間の長さを可変設定する可変手段としては、実行期間を継続時間(カウンタT)にて設定するものに限らず、回転速度NEにて設定するものであってもよい。
【0118】
上記実施形態では、バッテリ46の充電率に応じてチェンジオブマインドに際してのトルクアシストの実行期間の長さを可変とした(可変手段を備えた)が、これに限らず、たとえば、エンジン10の回転速度NEが燃焼制御によって自立運転可能な回転速度に達するまでの期間に固定してもよい。
【0119】
「加速要求判断手段について」
上記実施形態では、回転速度の変動量ΔNEが規定量Δth以下である旨の条件と、スロットルバルブ16の開口度θが閾値開度θth以上である旨の条件と、開口度の変化速度Δθが閾値速度Δθth以上である旨の条件との論理積が真であることを、加速要求ありと判断したがこれに限らない。たとえば、開口度の変化速度Δθが閾値速度Δθth以上である旨の条件のみによって加速要求があると判断し、これに基づき加速アシスト処理を実行してもよい。
【0120】
「加速アシスト手段について」
【0121】
上記実施形態では、バッテリ46の充電率に応じて加速アシスト処理の実行の有無を判断したが、これに限らず、たとえば充電率に応じて加速アシスト処理の実行期間の長さを連続的または2段階以上で段階的に可変としてもよい。ここで、実行期間の長さにゼロを含める場合、これは禁止手段を構成する。
【0122】
「始動アシスト手段について」
上記第1の実施形態では、始動アシスト処理の実行期間を時間にて定めたが、エンジン10の回転速度NEにて定めてもよい。この場合、回転速度NEの閾値を高くするほど実行期間が長くなる。
上記第2の実施形態において、昇圧処理の開始タイミングを、圧縮上死点に起因してクランク軸30に加わる負荷トルクが最大となる直前(たとえば360°BTDC)としてもよい。また、「始動発電機のトルクの上限値Tmaxについて」の欄に記載したものであってもよい。
【0123】
「制限トルク付与手段について」
バッテリ46の正極および負極の双方をインバータINVの入力端子に接続して且つ120°通電処理や180°通電処理(PWM処理による電流制限を含む)によって始動発電機40を駆動するものに限らない。たとえば、120°通電処理(PWM処理による電流制限を含む)を採用するものの、180°通電処理(PWM処理による電流制限を含む)についてはこれを採用しないものであってもよい。またたとえば、180°通電処理(PWM処理による電流制限を含む)を採用するものの、120°通電処理(PWM処理による電流制限を含む)についてはこれを採用しないものであってもよい。さらにたとえば、バッテリ46を始動発電機40の中性点に接続したとしても、昇圧処理のためのDutyの値によっては、昇圧によるトルクの増大効果よりもPWM処理によるトルクの低減効果が大きくなることに鑑み、Duty制限によってトルクを上限値Tmax以下に制限しつつトルクアシストを実行してもよい。
【0124】
「トルクアシストに関するマンマシーンインターフェースについて」
キャンセルスイッチ62によってキャンセル可能なものとしては、加速アシスト処理および燃料復帰アシスト処理に限らない。たとえばこれらのうちのいずれか一方のみとしてもよい。また、チェンジオブマインドアシスト処理を加えたり、始動アシスト処理を始動に必要な最小限の期間よりも長くする処理を加えたりしてもよい。もっとも、キャンセル可能な構成自体必須ではない。
【0125】
トルクアシストの実行の有無の通知手段としては、表示器70に限らず、音声であってもよい。
【0126】
トルクアシストの実行の有無の通知対象としては、加速アシスト処理および燃料復帰アシスト処理に限らない。たとえば、始動アシスト処理を始動に必要な最小限の期間よりも長くする処理を加えてもよい。もっとも、始動発電機40によるトルクによってクランク軸30の回転をアシストする処理の実行期間の全てにおいて通知してもよい。
【0127】
トルクアシストの実行の有無の通知手法としては、実施通知と、やりうることについて未実施の場合の未実施通知との双方を各別の信号として通知するものに限らない。たとえば実施のみを通知するものであってもよい。
【0128】
また、バッテリ46の充電率に基づき、トルクアシストの実行が可能か否かを常時通知するものであってもよい。
【0129】
「始動発電機のトルク制御について」
上記発明では、180°通電処理(または昇圧処理)または120°通電処理(PWM処理による電流制限を含む)によって実現されるトルクに制御したが、これに限らない。たとえば正弦波制御を実行してもよい。この場合、昇圧制御としては、たとえば特開2010−28941に記載されているように、下側アームの短絡期間と上側アームの短絡期間との合計期間に対する下側アームの短絡期間の時比率によって昇圧率を制御すればよい。
【0130】
「昇圧制御手段について」
昇圧制御手法としては、上記実施形態で例示したものに限らないことについては、「始動発電機のトルク制御について」の欄に記載したとおりである。
【0131】
「中性点とバッテリ46との接続手法について」
たとえば、バッテリ46の正極をインバータINVの正極側の入力端子に接続し、バッテリ46の負極側を中性点に接続するとともに、中性点とインバータINVの負極側の入力端子との間にコンデンサを接続してもよい。この場合、コンデンサ42を削除することができ、インバータINVの一対の入力端子間に接続される直流電圧源は、バッテリ46とコンデンサとの直列接続体となり、昇圧制御によってコンデンサの充電電圧を増大させることで直流電圧源の電圧を昇圧する。なお、この場合、上側アームのスイッチング素子S¥pのオンとすべき期間において昇圧のためのPWM処理を実行する。
【0132】
「切替手段、切替制御手段について」
バッテリ46の正極および負極の双方をインバータINVの入力端子に接続する第2接続状態を実現する構成(切替手段)を備えなくてもよい。この場合、インバータINVの一対の入力端子のいずれかおよび中性点間にバッテリ46の一対の端子を接続する第1接続状態によってバッテリ46の充電処理を実行すればよい。
また、切替手段としては、リレー48に限らず、半導体スイッチ等であってもよい。
【0133】
「内燃機関について」
単気筒内燃機関に限らず、たとえば2気筒等、複数気筒を有するものであってもよい。この場合、始動時に要求されるトルクがさらに大きくなりうるが、この場合であっても、始動発電機40の体格を発電性能によって要求される必要最小限の大きさを極力越えないものとしつつも始動処理を実現可能とするうえでは、上記実施形態の要領で昇圧電圧を利用することが有効である。ちなみに、この論理は、内燃機関を筒内噴射式のガソリン機関や圧縮着火式内燃機関(ディーゼル機関等)に変更することに対しても成立する。
【0134】
「始動発電機について」
上記実施形態では、停止状態から圧縮乗り越えを行なう場合に要するトルクが上限値Tmaxよりも大きいものを採用したが、これに限らず、小さいものであってもよい。また、昇圧を行わない場合に生成可能なトルクがゼロとなる回転速度の最低値が目標回転速度Niよりも小さいものを採用したに限らず、たとえば目標回転速度Niよりも大きいものであってもよい。この場合であっても、発電機のみの要求に応じたものから体格の大型化等を極力抑制しつつ始動性の向上や燃料消費率の低下等を図る上では、昇圧処理を行なうことは有効である。
【0135】
また、SPMに限らず、たとえば埋め込み磁石同期機(IPM)等であってもよい。
【0136】
「始動発電機の回転子とクランク軸40との連結について」
回転速度比1に限らない。ちなみに、クランク軸40の回転速度に対して回転子の回転速度の方が高くなる設定とするなら、始動発電機の極対数を低減しても、始動アシスト処理等を的確に行なうことが容易となる。
【0137】
「始動発電機のトルクの上限値Tmaxについて」
上記実施形態では、始動発電機40に流せる電流(連続定格電流)のために、上限値Tmax以上のトルクを生成できないとしたが、これに限らない。たとえば、上限値Tmaxに対応する電流(連続定格電流)を超えることで、インバータINVを構成するスイッチング素子S¥#が発熱限界に達し信頼性の低下が懸念されることから、上限値Tmax以下に制御する仕様であってもよい。ここでは、インバータINVの連続定格電流が発電時に要求される電流を極力超えないように設定されることが、インバータINVの小型化の観点から望ましい。
なお、いずれにせよ、連続定格電流に基づき上限値Tmaxが定まることに鑑みれば、エンジン10の始動に際し始動発電機40やインバータINVの発熱量が上限値に達する以前の短時間に限って上限値Tmaxを上回るトルクを生成する制御を行なうことも可能となり得る。このため、上限値Tmaxが一定である回転速度領域において、昇圧処理によって上限値Tmaxを超えるトルクを生成することで圧縮上死点を通過させて始動性を向上させるようにしてもよい。なお、この場合、トルクアシストを継続することが困難なため、たとえば圧縮上死点に起因してクランク軸30に加わる負荷トルクが最大となる直前から圧縮上死点を通過するまでの規定期間に限ってトルクアシストを行えばよい。ただし、圧縮上死点を通過する直前の回転速度NEが過度に低いと、燃焼制御を良好に開始することができないおそれがあるため、この場合には、上記規定期間となる都度、トルクアシストを行なうことでクランク軸30を加速し、回転速度NEが燃焼制御を良好に行なうことができる速度となった時点で燃焼制御を開始することが望ましい。
【0138】
「直流交流変換回路について」
先の図1に例示したものに限らず、たとえば上側アームのスイッチング素子S¥pをPチャネルMOS電界効果トランジスタとしてもよい。また、スイッチング素子S¥#としては、電界効果トランジスタに限らず、たとえば絶縁ゲートバイポーラトランジスタ(IGBT)等であってもよい。
【0139】
「充電率の定量化手法について」
端子電圧Vbを充電率を一義的に定めるパラメータとみなす手法に限らない。たとえば、イグニッションスイッチ52がオンされた直後の端子電圧Vbと、それ以降のバッテリ46の充放電電流量の収支とに基づき充電率を定量化してもよい。ここで、イグニッションスイッチ52がオンされた直後の端子電圧Vbは、開放端電圧とみなすことができ、バッテリ46の分極や内部抵抗による電圧降下の影響をほとんど受けないことから、充電率を高精度に表現するパラメータである。このため、充電率の初期値を上記端子電圧Vbによって定量化して且つ、上記収支に基づきこれを更新することで現在の充電率を見積もることができる。なお、開放端電圧に近似した端子電圧を検出するタイミングとしては、イグニッションスイッチ52がオンされた直後に限らない。たとえばスイングバック制御時やスイングバック制御から正転し始めたときであってもよい。これは、この期間におけるバッテリ46の放電電流が小さいと想定されることによる。また、開放端電圧に近似した端子電圧Vbを直接検出するものに限らず、スイングバック時やスイングバックから正転し始めたときの回転速度NEによって間接的に検出するものであってもよい。これは、120°通電等、電圧利用率が固定された制御を行なう場合、回転速度NEやその変化がインバータINVの入力電圧に応じて変動することに鑑みたものである。
【0140】
もっとも、始動に際して充電率の初期値を定めるものに限らず、端子電圧Vbが開放端電圧に近似するタイミングとなる都度、充電率の定量値を更新するようにしてもよい。ここで、開放端電圧に近似するタイミングとしては、たとえば先の図5のステップS18のゼロトルク制御時等が考えられる。この際、たとえばライトを点灯していない等の条件を付与することが望ましい。
【0141】
また、これに代えて、端子電圧Vbの複数のサンプリング値に基づき、充電率を定量化するものであってもよい。これは、たとえばバッテリ46の端子電圧Vbの所定期間における最大値、最小値、平均値、および最大値と最小値との差等の変動値の少なくとも1つとしたり、エンジン10の所定の運転状態においてバッテリ46を充電する際のバッテリ46の電圧の上昇度合い等としたりすればよい。ここで、バッテリ46の電圧の上昇度合いは、上昇量が所定量となるまでの所要時間や、所定時間内の上昇量によって定量化することができる。
【0142】
「車両について」
自動2輪車に限らず、たとえば後輪が2つある自動3輪車等であってもよい。こうした場合であっても、バッテリ46の充電用の始動発電機を内燃機関の始動等において電動機として併用する用途等において、充電用のものに対する要求以上の要求を極力回避するうえでは、本発明の適用が有効である。
【0143】
「そのほか」
始動発電機40とインバータINVとの間を開閉する開閉手段を備えてもよい。この場合、発電を行わないときには開閉手段を開状態とすることで、始動発電機40からクランク軸30に加えられる負荷トルクを、機械的な要因によるものを除き、ゼロとすることができる。しかしこの場合であっても、始動アシスト処理等において燃焼制御を遅らせることは燃料消費率の大きい領域で燃焼制御がなされることを極力抑制することができるため、燃料消費量を低減するうえで有効ではある。
発電処理を行なう条件としては、先の図5に例示したものに限らない。たとえば図5のステップS10における回転速度NEの条件として、目標回転速度Niよりも高い規定速度以上であることとしてもよい。
【符号の説明】
【0144】
10…エンジン、40…始動発電機、40u,40v,40w…固定子巻線、42…コンデンサ(直流電圧源の一実施形態)、46…バッテリ、56…制御装置。
【技術分野】
【0001】
本発明は、自動2輪車のエンジン等に設けられる始動発電機について、該始動発電機を制御対象とする始動発電機の制御装置に関する。
【背景技術】
【0002】
例えば下記特許文献1に見られるように、自動2輪車において、内燃機関のクランク軸の回転エネルギを電気エネルギに変換する発電機を、内燃機関の始動に際してクランク軸に初期回転を付与する電動機として併用することが提案されている。ここでは、内燃機関の始動に際して、電動機によって生成されるトルクによっては、圧縮行程においてクランク軸に付与される負荷トルクに打ち勝つことが困難であることに鑑み、圧縮行程において排気バルブを開弁させ、負荷トルクを低減するデコンプ装置を利用している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−255272号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ただし、上記デコンプ装置を備えたとしても、電動機のトルクが小さいために、始動に要する時間が長くなる等、クランク軸に付与するトルクが小さいことによる問題が解消されるわけではない。
【0005】
本発明は、上記課題を解決する過程でなされたものであり、その目的は、車載主機としての内燃機関のクランク軸の回転エネルギを電気エネルギに変換してバッテリに充電するための始動発電機について、該始動発電機を制御対象とする新たな始動発電機の制御装置を提供することにある。
【課題を解決するための手段】
【0006】
以下、上記課題を解決するための手段、およびその作用効果について記載する。
【0007】
請求項1記載の発明は、内燃機関のクランク軸の回転エネルギを電気エネルギに変換してバッテリ(46)に充電するための始動発電機について、該始動発電機を制御対象とする始動発電機の制御装置において、前記始動発電機は、固定子巻線同士が中性点で接続されたものであり、前記始動発電機には、コンデンサを備えた直流電圧源(42)の正極および負極のそれぞれと前記始動発電機の各固定子巻線との間を開閉するスイッチング素子を備える直流交流変換回路(INV)が接続され、前記中性点と前記バッテリ(46)とが接続された状態で、前記直流交流変換回路(INV)を構成する前記スイッチング素子の操作によって前記直流電圧源(42)の電圧を前記バッテリ(46)の電圧に対して昇圧する昇圧制御手段と、前記昇圧制御手段によって前記直流電圧源(42)の電圧が前記バッテリ(46)の電圧よりも高くなっている状態で前記直流交流変換回路(INV)を構成する前記スイッチング素子を操作することで、前記始動発電機を電動機として利用して前記クランク軸にトルクを付与するトルク付与手段とを備えることを特徴とする。
【0008】
上記発明では、固定子巻線および直流交流変換回路を構成するスイッチング素子によって昇圧チョッパ回路を構成することで、直流電圧源の電圧をバッテリの端子電圧に対して昇圧することができる。このため、部品点数の増加等を極力抑制または回避しつつ直流交流変換回路の入力電圧を上昇させることができる。そしてこれにより、始動発電機を電動機として機能させる際のトルクを増大させることができるため、発電機としての機能が主である始動発電機を用いてクランク軸の回転に必要なトルクを付与することができる。
【0009】
請求項2記載の発明は、請求項1記載の発明において、前記クランク軸の回転速度をアイドリング時の目標値に制御するアイドル回転速度制御手段を備え、前記直流交流変換回路の入力電圧を前記バッテリの端子電圧とした場合に生成可能な前記始動発電機のトルクが、前記クランク軸の回転速度をゼロから前記目標値まで上昇させるのに要するトルクよりも小さいことを特徴とする。
【0010】
上記発明では、始動発電機を電動機として利用した場合のトルクが、直流交流変換回路の入力電圧をバッテリの端子電圧とすると、非常に小さいものとなっている。このため、始動発電機の主の用途である発電機としての用途に従って設計した場合と比較して体格の大型化等を極力抑制した始動発電機や直流交流変換回路を実現することができる。そしてこの場合、クランク軸にトルクを付与するに際してトルクが不足する懸念が生じるものの、これについては昇圧制御手段およびトルク付与手段によって解消される。
【0011】
請求項3記載の発明は、請求項1または2記載の発明において、車両を駆動するためのトルクに関するユーザの要求が所定以下であることに基づき前記内燃機関の燃焼制御を停止する停止手段と、該停止手段による停止処理がなされているとき、前記内燃機関の回転速度が復帰回転速度以下となることで前記燃焼制御を開始する復帰手段とを備え、前記トルク付与手段は、前記復帰手段によって燃焼制御が開始される場合、前記トルクを付与する処理としての燃料復帰アシスト処理を行なう燃料復帰アシスト手段を備えることを特徴とする。
【0012】
復帰回転速度は、内燃機関の燃焼制御の再開に伴ってその回転速度を安定させることができる速度でなければならない。そしてこの復帰回転速度は、燃料復帰アシスト処理を行なわない場合と比較して燃料復帰アシスト処理を行なう場合には低い回転速度に設定することができ、これにより燃料消費量や排出ガス量を少なくすることが可能であることが発明者らによって見出されている。上記発明では、この点に鑑み、燃料復帰アシスト処理手段を備えた。
【0013】
請求項4記載の発明は、請求項3記載の発明において、前記復帰手段は、前記バッテリの充電率が高い場合、前記復帰回転速度を低下させるものであることを特徴とする。
【0014】
復帰回転速度が低いほど、燃料復帰アシスト処理に要求される電力量が多くなる。このため、バッテリの充電率が低いにもかかわらず復帰回転速度を過度に低下させる場合には、燃料復帰アシスト処理によって消費される電力量が過度に大きくなり、ひいてはバッテリを電源とする電子機器の駆動に支障をきたすことが懸念される。この点、上記発明では、復帰回転速度を充電率に応じて定めることで、こうした事態を回避しつつも復帰回転速度を極力低下させることができる。
【0015】
請求項5記載の発明は、請求項3または4記載の発明において、前記クランク軸の回転速度をアイドリング時の目標値に制御するアイドル回転速度制御手段を備え、前記燃料復帰アシスト手段は、前記クランク軸の回転速度が前記目標値にて安定することと車両の駆動トルクに関するユーザの要求が増大することとの論理和条件が真となることを条件に前記燃料復帰アシスト処理を停止することを特徴とする。
【0016】
請求項6記載の発明は、請求項1〜5のいずれか1項に記載の発明において、ユーザによる車両の停車意思に基づき、前記内燃機関の燃焼制御を停止する自動停止処理を行なう自動停止処理手段と、前記自動停止処理の後、ユーザによる車両の発進意思に基づき、前記内燃機関の燃焼制御を開始する自動始動処理を行なう自動始動処理手段とを備え、前記トルク付与手段は、前記自動停止処理によって前記クランク軸の回転速度がゼロに向けて低下している状況下、前記自動始動処理が要求される場合、前記トルクを付与する処理としてのチェンジオブマインドアシスト処理を行なうチェンジオブマインドアシスト手段を備えることを特徴とする。
【0017】
自動停止処理によって内燃機関の回転速度が低下する状況下、ユーザによる車両の発進意思が生じる場合には、自動停止処理を行なわなかった場合と比較してユーザの要求に迅速に対応することができなくなるおそれがある。この点、上記発明では、チェンジオブマインドアシスト処理を行なうことで、始動発電機の応答性を利用して内燃機関の回転速度を迅速に上昇させることができ、ひいてはユーザの要求に迅速に対応することができる。
【0018】
請求項7記載の発明は、請求項6記載の発明において、前記チェンジオブマインドアシスト手段は、前記クランク軸の回転速度が規定速度以上であることを条件に、前記昇圧制御手段によって昇圧された前記直流電圧源の電圧を利用するものであって且つ、前記クランク軸の回転速度が規定速度未満である場合、前記チェンジオブマインドアシスト処理として、前記直流電圧源の電圧を制限しつつ前記始動発電機を電動機として利用することで、前記クランク軸にトルクを付与する制限トルク付与処理を行なう制限トルク付与手段を備えることを特徴とする。
【0019】
始動発電機を流れる電流は、直流交流変換回路によって始動発電機に印加される電圧と始動発電機の逆起電圧との差に応じたものとなる。このため、始動発電機の回転速度が過度に小さい場合には、始動発電機に過度に大きい電流が流れることで始動発電機や直流交流変換回路の信頼性の低下を招いたり、電力の浪費につながったりするおそれがある。上記発明では、こうした事態を回避すべく、制限トルク付与手段を備えた。
【0020】
請求項8記載の発明は、請求項6または7記載の発明において、前記チェンジオブマインドアシスト手段は、前記バッテリの充電率が高いほど前記チェンジオブマインドアシスト処理の実行期間を長く設定する可変手段を備えることを特徴とする。
【0021】
実行期間が長いほど、チェンジオブマインドアシスト処理に要求される電力量が多くなる。このため、バッテリの充電率が低いにもかかわらず実行期間を過度に長くする場合には、チェンジオブマインドアシスト処理によって消費される電力量が過度に大きくなり、ひいてはバッテリを電源とする電子機器の駆動に支障をきたすことが懸念される。この点、上記発明では、実行期間の長さを充電率に応じて定めることで、こうした事態を回避しつつも実行期間を極力長く設定することができる。
【0022】
請求項9記載の発明は、請求項1〜8のいずれか1項に記載の発明において、車両を駆動するトルクの増大要求の有無を判断する加速要求判断手段を備え、前記トルク付与手段は、前記トルクの増大要求があると判断される場合、前記トルクを付与する処理としての加速アシスト処理を行なう加速アシスト手段を備えることを特徴とする。
【0023】
車両を駆動するトルクの増大要求に内燃機関のみによって応じる場合、内燃機関における燃焼エネルギを増加させる処理に要する時間のためにトルクが増大するまでに要する時間が長くなる傾向にあり、いわゆる加速性能が低下する。上記発明では、この点に鑑み、始動発電機を用いて加速アシスト処理を実行することで、加速性能を改善することができる。
【0024】
請求項10記載の発明は、請求項9記載の発明において、前記バッテリの充電率が低い場合、前記加速アシスト処理を禁止する禁止手段を備えることを特徴とする。
【0025】
加速アシスト処理を実行する場合、バッテリの蓄電エネルギが消費される。このため、バッテリの充電率が過度に低いにもかかわらず加速アシスト処理を行なう場合には、バッテリを電源とする電子機器の駆動に支障をきたすことが懸念される。この点、上記発明では、禁止手段を備えることでこうした事態が生じることを回避することができる。
【0026】
請求項11記載の発明は、請求項1〜10のいずれか1項に記載の発明において、前記トルク付与手段は、前記内燃機関の始動要求に応じて前記トルクを付与する処理としての始動アシスト処理を行なう始動アシスト手段を備えることを特徴とする。
【0027】
上記発明では、内燃機関の始動に際して上記昇圧制御手段によって昇圧された電圧を用いつつ、クランク軸にトルクを付与する処理を行なう。このため、始動発電機の体格を、発電機としての要求のみを満たすものから極力大型化しないようにすることが容易となる。
【0028】
請求項12記載の発明は、請求項11記載の発明において、前記始動アシスト手段は、前記クランク軸の回転速度が規定速度以上であることを条件に、前記昇圧制御手段によって昇圧された前記直流電圧源の電圧を利用するものであって且つ、前記クランク軸の回転速度が規定速度未満である場合、前記始動アシスト処理として、前記直流電圧源の電圧を制限しつつ前記始動発電機を電動機として利用することで、前記クランク軸にトルクを付与する制限トルク付与処理を行なう制限トルク付与手段を備えることを特徴とする。
【0029】
始動発電機を流れる電流は、直流交流変換回路によって始動発電機に印加される電圧と始動発電機の逆起電圧との差に応じたものとなる。このため、始動発電機の回転速度が過度に小さい場合には、始動発電機に過度に大きい電流が流れることで始動発電機や直流交流変換回路の信頼性の低下を招いたり、電力の浪費につながったりするおそれがある。上記発明では、こうした事態を回避すべく、制限トルク付与手段を備えた。
【0030】
請求項13記載の発明は、請求項11または12記載の発明において、前記始動アシスト手段は、前記始動アシスト処理の実行期間の長さを前記バッテリの充電率が高いほど長く設定する可変手段を備えることを特徴とする。
【0031】
実行期間が長いほど、始動アシスト処理に要求される電力量が多くなる。このため、バッテリの充電率が低いにもかかわらず実行期間を過度に長くする場合には、始動アシスト処理によって消費される電力量が過度に大きくなり、ひいてはバッテリを電源とする電子機器の駆動に支障をきたすことが懸念される。この点、上記発明では、実行期間の長さを充電率に応じて定めることで、こうした事態を回避しつつも実行期間を極力長く設定することができる。
【0032】
請求項14記載の発明は、請求項11または12記載の発明において、前記内燃機関は、4ストロークエンジンであり、前記始動アシスト手段は、圧縮行程に起因して前記クランク軸に加わる負荷トルクが極大となる期間を通過したことを前記始動アシスト処理の終了条件とすることを特徴とする。
【0033】
クランク軸の回転を妨げる負荷トルクは、周期性を有して且つ圧縮行程に起因して極大となる。したがって、圧縮行程を通過した後には、小さい駆動トルクによって内燃機関の回転を安定化させることが比較的容易となる。上記発明では、この点に鑑み、上記終了条件を設定した。
【0034】
請求項15記載の発明は、請求項1〜14のいずれか1項に記載の発明において、前記直流交流変換回路の正極側および負極側の一対の入力端子のいずれかおよび前記中性点と前記バッテリの正極および負極の一対の端子とを接続する第1接続状態と、前記直流交流変換回路の一対の入力端子と前記バッテリの一対の端子とを接続する第2接続状態とを切り替える切替手段と、前記クランク軸の回転エネルギを電気エネルギに変換してバッテリに充電する場合、前記第2接続状態として且つ、前記昇圧制御手段による制御の開始に先立ち前記第1接続状態とすべく前記切替手段を操作する切替制御手段とをさらに備えることを特徴とする。
【0035】
中性点で連結された固定子巻線のそれぞれを流れる電流は、周期性を有して且つ、その位相は互いに相違する。このため、始動発電機の各端子から直流交流変換回路へと出力される電流の合計値の変動は、単一の端子からの出力電流の変動と比較して小さなものとなる。このため、直流交流変換回路の入力端子にバッテリを接続した第2接続状態において始動発電機を発電機として利用することで、第1接続状態において始動発電機を発電機として利用する場合と比較して、バッテリの入力電流のリップルを低減することができる。
【0036】
請求項16記載の発明は、請求項1〜15のいずれか1項に記載の発明において、前記昇圧制御手段は、前記直流交流変換回路を構成するスイッチング素子のうち前記直流電圧源の正極側に接続されるものおよび負極側に接続されるもののそれぞれについてのオン状態となりうる期間であるベースオン期間が、前記固定子巻線のそれぞれで互いに等しい長さとされて且つ、前記固定子巻線毎に各別の位相に設定されるに際し、前記正極側に接続されるスイッチング素子および前記負極側に接続されるスイッチング素子のいずれかを前記ベースオン期間において周期的にオンオフ操作するものであることを特徴とする。
【0037】
上記のように正弦波制御を採用せず矩形波制御を採用する場合、ベースオン期間において周期的にオンオフ操作を行なうことで、オフ操作期間に起因して電圧利用率が低下する。このため、通常、矩形波制御においてはベースオン期間のオンオフ操作は、トルクを制限する場合に行なわれる。これに対し、上記発明では、電圧利用率の低下による始動発電機のトルクの低下を直流交流変換回路の入力電圧の昇圧による始動発電機のトルクの増大が上回る制御が可能であることに着目した。これにより、部材の仕様変更や部品点数の増加を極力抑制または回避しつつ、直流交流変換回路の入力電圧をバッテリの端子電圧とする場合と比較して始動発電機のトルクを増大させることができる。
【図面の簡単な説明】
【0038】
【図1】第1の実施形態にかかるシステム構成図。
【図2】同実施形態にかかる始動発電機の生成可能なトルクと回転速度との関係を示す図。
【図3】同実施形態にかかる昇圧処理の原理を示す図。
【図4】同実施形態にかかる昇圧処理時の操作信号波形を示すタイムチャート。
【図5】同実施形態にかかる発電処理の手順を示す流れ図。
【図6】同実施形態にかかる始動アシスト処理の手順を示す流れ図。
【図7】同実施形態にかかる加速アシスト処理の手順を示す流れ図。
【図8】同実施形態にかかる燃料復帰アシスト処理の手順を示す流れ図。
【図9】同実施形態にかかるアイドルストップ制御の処理手順を示す流れ図。
【図10】同実施形態にかかるチェンジオブマインドアシスト処理の手順を示す流れ図。
【図11】第2の実施形態にかかる始動アシスト処理の手順を示す流れ図。
【発明を実施するための形態】
【0039】
<第1の実施形態>
以下、本発明にかかる始動発電機の制御装置を自動2輪車に適用した第1の実施形態について、図面を参照しつつ説明する。
【0040】
図1に、本実施形態にかかるシステム構成を示す。
【0041】
エンジン10は、単気筒の火花点火式内燃機関であり、詳しくは、4ストロークエンジンである。エンジン10の吸気通路12には、スロットルグリップ58に機械的に連結されて且つその操作に連動して通路面積を調節するためのスロットルバルブ16が設けられている。スロットルバルブ16の開口度θは、スロットルセンサ18によって検出される。吸気通路12のうちスロットルバルブ16の下流には、電子制御式の燃料噴射弁20が設けられている。
【0042】
吸気通路12は、吸気バルブ22の開動作に伴って燃焼室24と連通する。燃焼室24には、点火プラグ26が設けられている。点火プラグ26による点火操作によって、吸気通路12に吸入された空気(新気)と燃料噴射弁20から噴射された燃料との混合気が燃焼室24において燃焼に供される。この際生成される燃焼エネルギは、ピストン28の往復動を介して、クランク軸30の回転エネルギに変換される。ちなみに、クランク軸30付近には、その回転角度を検出するクランク角センサ32が設けられている。
【0043】
燃焼室24は、排気バルブ36の開動作に伴って排気通路38と連通する。これにより、燃焼室24内において燃焼に供された混合気が排気として排気通路38に排出される。なお、排気バルブ36を開閉させる手段については、デコンプ装置を備えることが望ましい。
【0044】
一方、始動発電機40は、その回転子40aがクランク軸30に機械的に連結されており、クランク軸30の回転エネルギを電気エネルギに変換する磁石式交流発電機となるものである。詳しくは、始動発電機40の回転子40aには、永久磁石が備えられている。一方、始動発電機40の固定子には、固定子巻線40u,40v,40wが設けられている。これら固定子巻線40u,40v,40wは、中性点Nにて互いに接続されている。ちなみに、本実施形態では、始動発電機40として、表面磁石同期機(SPM)を想定している。また、クランク軸30と回転子40aとは回転速度比1で機械的に連結されている一方、始動発電機40の極は4以上(たとえば12)とされている。このため、始動発電機40の電気角の1回転は、クランク軸30の1回転よりも小さい回転角度量となる。
【0045】
始動発電機40の端子(固定子巻線40u,40v,40wのうち中性点Nに接続されない側の端部)は、インバータINVに接続されている。インバータINVは、スイッチング素子S¥p,S¥n(¥=u,v,w)の直列接続体を3組備えており、これら各直列接続体の接続点が始動発電機40のU,V,W相にそれぞれ接続されている。これらスイッチング素子S¥#(¥=u,v,w;#=p,n)として、本実施形態では、NチャネルMOS電界効果トランジスタが用いられている。そして、これらにはそれぞれ、ダイオードD¥#が逆並列に接続されている。なお、ダイオードD¥#は、スイッチング素子S¥#のボディーダイオードであってもよい。
【0046】
インバータINVの一対の入力端子間には、直流電圧源(コンデンサ42)が接続されている。また、インバータINVの負極端子側(車体電位側)には、バッテリ46の負極端子が接続されている。バッテリ46は、車載補機の電源となる2次電池であり、端子電圧がたとえば18V以下(望ましくは12V前後)となるものである。バッテリ46としては、たとえば鉛蓄電池等を用いることができる。
【0047】
バッテリ46の正極端子側には、メインリレー54を介して電磁形リレー(リレー48)が接続されている。詳しくは、本実施形態では、可動鉄心形のものを例示している。リレー48は、バッテリ46の正極端子を中性点NとインバータINVの正極側の入力端子とのいずれに接続するかを切り替えるための手段である。なお、リレー48としては、通電のなされない場合にインバータINVの正極側の入力端子とバッテリ46の正極端子とを接続状態とするものであることが望ましい。リレー48のコイルの一方の端子は、開閉制御用スイッチング素子50を介して接地されており、他方の端子は、メインリレー54を介してバッテリ46の正極に接続されている。メインリレー54のコイルの一方の端子とバッテリ46の正極との間には、ユーザによって操作可能なイグニッションスイッチ52が接続されている。また、メインリレー54のコイルの他方の端子は、接地されている。これにより、イグニッションスイッチ52がオン操作されることで、メインリレー54は閉状態となる。
【0048】
制御装置56は、上記エンジン10や始動発電機40を制御対象とする制御装置である。なお、制御装置56とインバータINVとは、同一基板に形成されることが望ましい。制御装置56は、スロットルセンサ18や、クランク角センサ32に加えて、始動発電機40の回転角度を検出するたとえばホール素子等の回転角度センサ66、車速を検出する車速センサ67、バッテリ46の端子電圧を検出する電圧センサ68等の検出値を取り込む。また、キャンセルスイッチ62(後述)の操作信号を取り込む。そして、これらに基づき燃料噴射弁20や点火プラグ26を操作することでエンジン10の出力トルクを制御する。また、スイッチング素子S¥#の操作信号g¥#によってインバータINVのスイッチング素子S¥#を操作することで始動発電機40を制御する。
【0049】
始動発電機40は、基本的には、上述したようにクランク軸30の回転エネルギを電気エネルギに変換してバッテリ46に供給するための発電機として機能する。ただし、始動発電機40は、エンジン10の始動等にも利用される。ここで、自動2輪車においては、始動発電機40の搭載スペースの制約が特に厳しいものとなっている。たとえば、スクータ等の小型の自動2輪車においては、始動発電機40は、φ130mm程度で軸方向寸法が40mm程度以下の体格に制限される。このため、始動発電機40を電動機として利用する際の生成可能トルクが制限され、ひいては始動性の低下等が懸念される。以下、これについて説明する。
【0050】
図2に、一点鎖線にて、インバータINVの一対の入力端子間に端子電圧Vbのバッテリ46を接続した場合の始動発電機40の生成可能トルクと回転速度NEとの関係を示す(上述したように、クランク軸30と始動発電機40の回転子40aとが回転速度比1となるようにして機械的に連結されているため、エンジン10の回転速度NEは始動発電機40の回転速度でもある)。
【0051】
図示されるように、始動発電機40によって生成可能なトルクは、低速度領域において上限値Tmaxで一定となって且つ、それ以外の領域において回転速度NEの上昇とともに低下する。これは、基本的には、始動発電機40に流し込める電流が「(Vm−E)/√{r^2+(ωL)^2}」に比例することによる。ここで、回転子40aの永久磁石による磁束が固定子巻線40u,40v,40wに生じさせる逆起電力E、印加電圧Vm、始動発電機40の抵抗r、インダクタンスLおよび回転速度に応じた周波数ωを用いた。このため、回転速度NEが上昇するにつれて始動発電機40によって生成可能なトルクTが低下する。ここで、本実施形態では、トルクがゼロとなる上限速度は、アイドリング時の目標回転速度Ni(たとえば1300〜1800rpm、より望ましくは、1400〜1700rpm)よりも小さくなっている。このため、始動発電機40は、エンジン10の燃焼制御を行なわないなら、回転速度NEをゼロから目標回転速度Niまで上昇させることができないものとなっている。
【0052】
一方、速度が低い領域において上限値Tmaxで固定されるのは、始動発電機40の構造上、流せる電流に発熱に起因した限界があるためである。この電流値は、本実施形態では、電動機の機能を兼ねることで始動発電機40が大型化することを極力回避した設計とすることに起因している。
【0053】
すなわち、発電機としての要求を満たす上では、発電量が小さくなるアイドリング運転時において、バッテリ46に所定の電圧(たとえば14V)を印加して且つ所定量の電流(たとえば1A)を流せるようにする必要がある。ここで、発電電圧や発電電流を増大させるうえでは、固定子巻線40u,40v,40wの巻数を増加させることが有効である一方、巻数の増加は、始動発電機40の大型化を招く。このため、発電機としての要求を満たす上では、固定子巻線40u,40v,40wの巻数を細くして且つそれらの線径を小さくする必要がある。
【0054】
これに対し、電動機としての要求を満たす上では、生成可能なトルクを大きくすべく流せる電流を大きくする必要が生じる。そして流せる電流を大きくする上では、固定子巻線40u,40v,40wの線径を太くすることが必要である。
【0055】
このため、発電機としての要求と電動機としての要求との双方を満たす上では、始動発電機40を大型化する必要が生じる。しかし、電動機としての機能を兼ねることで始動発電機40が大型化することは望ましくない。そこで、発電機としての要求のみを満たすうえでの体格と比較して体格の大型化を無視しうるレベルに抑えるべく、固定子巻線40u,40v,40wの線径を制限して設計したため、発熱限界に起因した流せる電流(連続定格電流)の上限が小さくなり、ひいては回転速度NEがある値以上小さくなっても生成可能な最大トルクに変化のない領域が生じている。
【0056】
ここで、エンジン10の始動時においてクランク軸30を回転させるに際してクランク軸30の回転を妨げるトルク(負荷トルク)は、周期性を有し、エンジン10の圧縮上死点に起因して極大となる。そして本実施形態では、停止中のエンジン10を回転させる処理の開始時に上記極大値に打ち勝つために要求されるトルクが上限値Tmaxよりも大きいものとなっている。ここで、負荷トルクに打ち勝つのに要する始動発電機46の出力トルクは、回転速度NEがゼロのときよりもある程度高回転となるときの方が、クランク軸30およびピストン28等の運動エネルギが大きくなっているために小さくなる。特に、本実施形態では、回転速度NEがゼロよりも大きくて且つ目標回転速度Niよりも小さい領域において圧縮行程に伴う極大値を有した負荷トルクにもかかわらず正回転を継続させることが可能なトルクを生成可能な設定となっている。
【0057】
ただし、この場合、エンジン10のクランク軸30の停止角度によっては、圧縮行程となるまでの回転角度が小さいため、クランク軸30の回転速度を十分に加速することができず、ひいては始動発電機46によって圧縮行程に起因した負荷トルクに打ち勝つトルクを生成できない。このため、こうした領域では、クランク軸30を一旦逆回転させその後クランク軸30を正回転させることで、圧縮行程における回転速度NEを上昇させるいわゆるスイングバック処理を行なうこととなる。
【0058】
しかし、インバータINVの入力電圧をバッテリ46の端子電圧Vbとした場合、始動発電機46の生成可能なトルクが低下し始める回転速度NEが低いため、圧縮行程に達する以前に十分に加速するうえでは、逆回転させる量を大きくする等、スイングバックに要する時間が伸長する。
【0059】
そこで本実施形態では、中性点Nにバッテリ46の正極を接続することでインバータINVの入力電圧を昇圧し、図2に実線にて示すようにトルクの生成可能領域を拡大する。
【0060】
図3に、昇圧処理の原理を示す。この昇圧処理は、固定子巻線40¥(¥=u,v,w)を昇圧チョッパ回路のリアクトルとして利用することでバッテリ46の端子電圧Vb対して昇圧した電圧をコンデンサ42に印加するものである。すなわち、図3(a)に示すようにスイッチング素子S¥nをオン操作することで、バッテリ46、固定子巻線40¥、およびスイッチング素子S¥nを備えるループ経路に電流が流れ、固定子巻線40¥にエネルギが蓄積される。そして、図3(b)に示すように、スイッチング素子S¥nをオフ操作することで、バッテリ46、固定子巻線40¥、ダイオードD¥pおよびコンデンサ42を備えるループ経路に電流が流れ、固定子巻線40¥に蓄積されたエネルギがコンデンサ42に出力される。
【0061】
具体的には、本実施形態では、図4に示すように、矩形波制御(180°通電処理)に従ってスイッチング素子S¥#を操作するに際し、下側アームのスイッチング素子S¥nのオンとすべき期間(ベースオン期間)において、そのオンとすべき期間(電気角で180°の期間)よりも短い期間Tcを周期としてスイッチング素子S¥nをオン・オフ操作する。ここで、180°通電処理は、スイッチング素子S¥pとスイッチング素子S¥nとを電気角の180°毎に交互にオン状態として且つ、相毎にオン操作の位相が「120°」ずつずれたものである。
【0062】
これにより、周期Tcに対するオン期間の時間比率(デューティD)によって昇圧電圧を制御することができる。ここで、180°通電処理を採用したのは、第1に、制御の簡素化のためであり、第2に、電圧利用率が最大となるためである。すなわち、本実施形態では、始動時等、限られた期間に始動発電機40を電動機として利用するに過ぎず、また単気筒の内燃機関を主機としていることもあり、トルクリップル等が問題となることはない。むしろここで要求されるのは、始動発電機40によって生成可能な最大トルクを実現することである。このため、電圧利用率が最大となる180°通電処理を採用した。
【0063】
ちなみに、180°通電処理においてもスイッチング状態の切替位相を操作することでトルクは変動しうる。本実施形態では、最大のトルクに開ループ制御すべく、スイッチング状態の切替位相δ(インバータINVの出力電圧の位相)を回転速度NEに応じて操作する。
【0064】
また、上記のように、下側アームのスイッチング素子S¥nをオン・オフ操作する(PWM処理する)場合には、180°通電処理の本来の電圧利用率と比較して実際の電圧利用率が低下する。実際、正弦波制御を行わない簡易な制御器において120°通電処理や180°通電処理等を用いる場合、これら方式に従ってオンとすべき期間においてPWM処理することは、通常、電流を制限する目的でなされている。しかし、本実施形態では、PWM処理によるトルクの低減効果を昇圧によるトルクの増大効果が上回るように、デューティDおよびPWM処理の位相を設定することで、PWM処理によってトルクを増大させている。
【0065】
なお、インバータINVとバッテリ46との間に昇圧チョッパ回路を別途設けるなら、インバータINVの入力電圧をバッテリ46の電圧よりも上昇させて且つ、180°通電処理の電圧利用率を実現することができる。しかし、これは、上述した搭載スペースの制約を満たすことを困難としうる。また、エンジン10の始動等、車両の走行利用期間に対してクランク軸30を正回転させるためのトルクを付与する電動機が必要とされる期間が極めて短いにもかかわらず、この僅かな期間のために新たなハードウェア手段を搭載することとなり、望ましくない。
【0066】
上記昇圧処理により、本実施形態では、先の図2に実線にて示すように、生成可能な最大トルクを上限値Tmaxとすることのできる領域を回転速度Ntまで拡大することができ、ひいてはエンジン10の始動に要する時間を短縮することができる。そして、トルクを増大することができることから、本実施形態では、始動時以外においてもいくつかのエンジン10のアシスト処理を行なう。
【0067】
以下、始動発電機40の制御に関し、「発電処理」、「始動アシスト処理」、「加速アシスト処理」、「燃料復帰アシスト処理」、および「チェンジオブマインドアシスト処理」の順に説明する。
【0068】
「発電処理」
図5に、本実施形態にかかる発電処理の手順を示す。この処理は、制御装置56によってたとえば所定周期で繰り返し実行される。
【0069】
この一連の処理では、まずステップS10において、回転速度NEが目標回転速度Niよりも小さいことと後述するトルクアシスト処理の実行要求が生じていることとについて、それらの論理和が真であるか否かを判断する。そしてステップS10において否定判断される場合、ステップS12において、開閉制御用スイッチング素子50を通じてリレー48を操作することで、バッテリ46の正極側をインバータINVの正極側の入力端子に接続する。これは、始動発電機40の発電処理時において、インバータINVの一対の入力端子を介して始動発電機40の発電エネルギをバッテリ46に出力するための設定である。ここで、中性点Nを介してバッテリ46の充電を行わないのは、インバータINVの入力端子を介してバッテリ46に電力を出力する場合、3相のそれぞれの電流の合成電流がバッテリ46に出力されることから、バッテリ46への充電電流のリップルを低減することができることなどのためである。
【0070】
続くステップS14においては、バッテリ46の端子電圧Vbが上限電圧VthH以上である状態が継続するか否かを判断する。この処理は、バッテリ46への充電が可能であるか否かを判断するためのものである。ここで、バッテリ46の端子電圧Vbは、バッテリ46の充電率(満充電に対する実際の充電量:SOC)と相関を有する物理量である。ちなみに、バッテリ46の充電率は、開放端電圧(OCV)との間により強い相関を有するものであるが、ここでは、簡易的に端子電圧Vb(通常、閉路端電圧となる)を用いて充電率を定量化している。なお、上記上限電圧VthHは、バッテリ46が満充電状態であるか否かを判断するための値に設定されている。また、上限電圧VthH以上である状態の継続を問題とすることの理由については、後述の処理の説明時に説明する。
【0071】
上記ステップS14において否定判断される場合、バッテリ46が未だ満充電状態でないと判断し、ステップS16において発電処理を行なう。ここでは、先の図4に例示した180°通電処理を行なう。ただし、この際、下側アームのスイッチング素子S¥nのPWM処理を行わない。なお、発電処理の実行時においてバッテリ46の端子電圧Vbが上限電圧VthH以上となると判断される場合、インバータINVの出力電圧の位相(スイッチング状態の切替位相)を進角させる処理を行なうことで発電量を低減させる。そして、位相の進角処理によってもバッテリ46の端子電圧Vbが上限電圧VthH以上となる状態が継続されることで、上記ステップS14において肯定判断されることとなる。
【0072】
上記ステップS14において肯定判断される場合、バッテリ46が満充電状態にあると判断し、ステップS18においてゼロトルク制御を行なう。これは、エネルギの浪費を極力抑制するための設定である。すなわち、本実施形態では、ハードウェア手段の簡素化のため、インバータINVと始動発電機40との間を遮断する手段や、クランク軸30と回転子40aとの機械的な連結を解除する手段を備えていない。このため、インバータINVのスイッチング素子S¥#を全てオフとしたとしても、始動発電機40が回転することで、固定子巻線40¥を鎖交する永久磁石の鎖交磁束数が周期的に変動することに起因した逆起電圧によって、ダイオードD¥#を介して電流が流れ、ひいてはクランク軸30に負荷トルクが付与されることでエンジン10の燃料消費量が増大する。また、上側アームのスイッチング素子S¥pの全てや下側アームのスイッチング素子S¥nの全てをオン操作したとしても、クランク軸30に負荷トルクが付与されることでエンジン10の燃料消費量が増大する。そのため、ステップS18では、始動発電機40の生成トルクがゼロとなるようにインバータINVを操作する。ちなみに、この際、インバータINVを操作することなどに起因して電力が消費されるが、これによる電力消費量は、上記負荷トルクによる燃料消費量の増大と比較して、巨視的な時間スケールにおける燃料消費率を低減しうるものである。
【0073】
なお、上記ステップS16,S18の処理が完了する場合や、ステップS10において否定判断される場合には、この一連の処理を一旦終了する。
【0074】
「始動アシスト処理」
図6に、本実施形態にかかる始動アシスト処理の手順を示す。この処理は、制御装置56によってたとえば所定周期で繰り返し実行される。
【0075】
この一連の処理では、まずステップS20において、始動要求があるか否かを判断する。これは、たとえばイグニッションスイッチ52と連動して操作される図示しない起動スイッチがオンとされるか否かに基づき判断すればよい。
【0076】
ステップS20において肯定判断される場合、ステップS22においてエンジン10の回転速度NEが下限速度NthL以下であるか否かを判断する。この処理は、昇圧処理を行なうか否かを判断するためのものである。すなわち、インバータINVの入力電圧をバッテリ46の端子電圧Vbとした場合の始動発電機40を流れる電流の上限値は、先の図2に示したように、発熱限界によって規定される最大トルクに対応するものであるため、始動発電機40の低速領域においては一定値(連続定格電流)となる。このため、低速領域では、始動発電機40に流れる電流を上限値に制御すべく、始動発電機40に印加する電圧の実効値を制限する。このため、この領域においては、昇圧処理を行わない。なお、下限速度NthLは、インバータINVの入力電圧をバッテリ46の端子電圧Vbとした場合の始動発電機40の生成可能トルクが上限値Tmaxから低下し始める回転速度程度に設定する。
【0077】
ステップS22において肯定判断される場合、ステップS24において、開閉制御用スイッチング素子50を通じてリレー48を操作することで、バッテリ46の正極側をインバータINVの正極側の入力端子に接続する。また、ステップS24では、回転速度が低い領域では、周知の120°通電処理を行ない、回転速度の上昇に伴って、180°通電処理に移行させる。なお、始動発電機40を流れる電流を上限値に高精度に制御する上では、120°通電処理や180°通電処理によってオンとすべき期間においてPWM処理を実行することが望ましい。また、このステップS24においては、クランク軸30を逆回転させるスイングバック等を適宜利用することで、圧縮行程に起因してクランク軸30の負荷トルクが極大となるタイミングにおいて回転速度NEがある程度高回転となるように制御する。
【0078】
一方、ステップS22において否定判断される場合、ステップS26に移行する。ここでは、開閉制御用スイッチング素子50を通じてリレー48を操作することで、バッテリ46の正極側を中性点Nに接続し、先の図4に示した態様にてスイッチング素子S¥#を操作する。
【0079】
続くステップS28においては、昇圧処理の開始からの時間を計時するカウンタの計時動作を行なう。そして、ステップS30においては、カウンタ値Tが閾値時間Tth以上となることとスロットルグリップ58の操作に従ってアイドル制御が終了することとについて、それらの論理和が真であるか否かを判断する。この処理は、燃焼制御を開始し、また昇圧処理を停止するか否かを判断するためのものである。ここで、本実施形態では、閾値時間Tthを、バッテリ46の端子電圧Vbが高いほど長く設定する。ここで、端子電圧Vbは、バッテリ46の充電率を定量化したものであり、この処理によって、目標回転速度Niとなった後も始動発電機40のみによってクランク軸30を回転させる処理を許容し、バッテリ46の充電率が高いほど燃焼制御の開始までの時間を伸長させる。これは、長期的な時間スケールにおける燃料消費率を低減するための設定である。
【0080】
すなわち、エンジン10の燃料消費率は、回転速度およびトルクに応じて定まる動作点毎に変動し、特に、低負荷低回転速度領域においては高いものとなる。このため、燃料消費率が高い領域において燃焼制御を極力行わないようにするためには、エンジン10の始動に際して始動発電機40によってクランク軸30を回転させる期間を長くすることが望ましい。加えて、エンジン10の回転速度NEが目標回転速度Niよりも高い領域においては燃料消費率の低下傾向があるものの、この時点でバッテリ46が満充電に達すると、先の図5のステップS18に示したゼロトルク制御によってバッテリ46の電力が浪費されることとなる。このため、バッテリ46の充電率をある程度低下させることで、ゼロトルク制御の開始までの期間を伸長させることが燃料消費率を改善することにつながる。
【0081】
上記ステップS30において肯定判断される場合、ステップS32において燃焼制御を開始し、また、始動アシスト処理を終了することで始動発電機40を発電機として利用するモードに切り替える。なお、リレー48の切り替えは、昇圧処理を停止することでコンデンサ42の充電電圧を規定電圧以下とした後、リレー48を流れる電流が規定値以下となることを条件に行なうことが望ましい。
【0082】
上記ステップS32の処理が完了する場合や、ステップS20において否定判断される場合には、この一連の処理を一旦終了する。
【0083】
「加速アシスト処理」
この処理は、ユーザによって車両を駆動するトルクの増大要求がなされる場合に、それに迅速に応えるために始動発電機40を電動機として利用するものである。なお、加速アシスト処理は、先の図1に示したキャンセルスイッチ62が操作される場合には、実行されない。
【0084】
図7に、本実施形態にかかる加速アシスト処理の手順を示す。この処理は、キャンセルスイッチ62によってこの処理を行わないことがユーザによって選択されていない場合に、制御装置56によってたとえば所定周期で繰り返し実行される。
【0085】
この一連の処理では、まずステップS40において、以下の(ア)〜(ウ)の条件の論理積が真であるか否かを判断する。
(ア)エンジン10の回転速度NEの変動量ΔNEが規定量Δth以下である状態が規定時間T1以上継続していること。
(イ)スロットルバルブ16の開口度θが閾値開度θth以上である状態が規定時間T2以上継続していること。
(ウ)スロットルバルブ16の開口度θの変化速度Δθが閾値速度Δθth以上である状態が規定時間T3以上継続していること。
(エ)回転速度NEが「Ni−δ」以上であって且つ規定速度NEinv以下である状態が既定時間T4以上継続していること。
【0086】
この処理は、加速アシスト処理を実行するか否かを判断するためのものである。また、上記(ア)〜(ウ)の条件は、ユーザによって車両を駆動するトルクの増大要求がなされていると判断するための条件である。ここで、規定時間T2,T3は、開口度θが閾値開度θth以上との判断や、変化速度Δθが閾値速度Δθth以上であるとの判断がノイズによって誤ってなされることを抑制するためのものである。また、上記(エ)の条件は、本実施形態では、目標回転速度Niよりも高回転速度領域において始動発電機40のトルクを大きくすることができないことに鑑み、加速アシスト処理をアイドル制御からの駆動トルクの増大要求時に限るために設けたものである。ここで、規定速度NEinvは、始動発電機40によってアシストトルクを生成できなくなる回転速度よりも低い回転速度に設定される。なお、「Ni−δ」以上との条件は、目標回転速度Niよりも過度に低い領域でアシスト処理を行わないためのものである。
【0087】
上記論理積が真である場合、ステップS42において、バッテリ46の端子電圧Vbが閾値電圧VthL以上であるか否かを判断する。この処理は、バッテリ46の充電率が低い場合、加速アシスト処理を禁止するためのものである。なお、閾値電圧VthLは、加速アシスト処理によってバッテリ46の電気エネルギが消費されることで、バッテリ46が車両の走行にとって必要な補機(燃料噴射弁20、点火プラグ26)等に必要な電力を供給することが困難となることのない電圧の下限値に基づき設定されている。
【0088】
そして、ステップS42において肯定判断される場合、ステップS44において、加速アシスト処理を行なう。すなわち、開閉制御用スイッチング素子50を通じてリレー48を操作することで、バッテリ46の正極側を中性点Nに接続し、先の図4に示した態様にてスイッチング素子S¥#を操作する。また、先の図1に示した表示器70を用いて、アシスト処理を実施していることを通知する。この処理は、ユーザに違和感を与えないために行われるものである。すなわち、加速アシスト処理は、キャンセルスイッチ62によってキャンセルすることができることから、ユーザが自発的に選択することで行われることではある。このため、一見すると、ユーザは加速アシスト処理を実施するに際して心の準備ができており、これを敢えてユーザに知らせる必要はないと考えられなくもない。しかし、自動2輪車においては、スロットルグリップ58の操作と駆動トルクとの対応関係が顕著であり、ユーザはスロットルグリップ58の操作と駆動トルクとの関係についてエンジン10のみによって駆動トルクが生じる場合の感覚を固定観念として形成しやすい。このため、加速アシスト処理が実施されることで、ユーザに違和感を与える懸念があることが見出された。ちなみに、この懸念は、スロットルグリップ58とスロットルバルブ16とが機械的に連結された本実施形態にかかるシステムにおいて特に顕著である。
【0089】
この加速アシスト処理は、回転速度N1が上記規定速度N1に達するか、所定時間が経過するまで実行される(ステップS46)。ここで、規定速度N1(>NEinv)は、始動発電機40によってアシストトルクを生成できなくなる回転速度N1に設定される。また、所定時間については、固定値でもよいが、端子電圧Vbが高いほど長くすることで、充電率が高いほどアシスト処理の実行可能期間を長くしてもよい。そして、回転速度N1が規定速度N1に達するか、所定時間が経過すると、ステップS49において、加速アシスト処理を終了することで、始動発電機40を用いた発電処理へと移行する。
【0090】
一方、上記ステップS42において否定判断される場合には、ステップS48において、バッテリ46の充電率が低いために加速アシスト処理を実行できない旨、上記表示器70を用いて通知する。これは、ユーザに、加速アシスト処理を実行する機能の故障なのかそうでないのかを識別可能とするための設定である。
【0091】
なお、ステップS48、S49の処理が完了する場合や、ステップS40において否定判断される場合には、この一連の処理を一旦終了する。
【0092】
「燃料復帰アシスト処理」
この処理は、燃料カット制御からの復帰(燃焼制御の再開)に際してクランク軸30に始動発電機40のトルクを付与するものである。この処理は、燃焼制御を再開させる回転速度を低下させ、燃料消費率を低減するためのものである。すなわち、燃料復帰アシスト処理を行わない場合、エンジン10の応答性等を考慮し、再開させる回転速度をアイドル時の目標回転速度Niよりも十分に高くする必要が生じる。なお、燃料復帰アシスト処理は、先の図1に示したキャンセルスイッチ62が操作される場合には、実行されない。
【0093】
図8に、本実施形態にかかる燃料復帰アシスト処理の手順を示す。この処理は、キャンセルスイッチ62によってこの処理を行わないことがユーザによって選択されていない場合に、制御装置56によってたとえば所定周期で繰り返し実行される。
【0094】
この一連の処理では、まずステップS50において、燃料カット制御が実施されている旨を示す燃料カットフラグFfが「1」であるか否かを判断する。そして、ステップS50において否定判断される場合、ステップS52において、車両を駆動するトルクに関するユーザの要求が所定以下である(減速要求)ことと回転速度NEが開始速度N2以上であることとについて、それらの論理積が真であるか否かを判断する。この論理積条件が燃料カット制御の実行条件である。ここで、減速要求の判断は、たとえばスロットルバルブ16の開口度θがゼロである場合に減速要求ありとすればよい。また、開始速度N2は、燃料カット制御を実行してもエンジンストールすることなく燃焼制御の再開によって回転速度NEを目標回転速度Niとすることができると想定される回転速度に設定される。
【0095】
ステップS52において肯定判断される場合、ステップS54において、燃料カット制御を実行するとともに、燃料カットフラグFfを「1」とする。
【0096】
そして、ステップS54の処理が完了する場合や、上記ステップS50において肯定判断される場合、ステップS56において、バッテリ46の端子電圧Vbが閾値電圧VthL以上であるか否かを判断する。この処理は、バッテリ46の充電率が低い場合、燃料復帰アシスト処理を禁止するためのものである。なお、閾値電圧VthLは、燃料復帰アシスト処理によってバッテリ46の電気エネルギが消費されることで、バッテリ46が車両の走行にとって必要な補機(燃料噴射弁20、点火プラグ26)等に必要な電力を供給することが困難となることのない電圧の下限値に基づき設定されている。
【0097】
そしてステップS56において否定判断される場合、ステップS58において、アシスト処理を実行しない旨、表示器70を用いて通知する。この処理は、先の図7のステップS48の処理と同趣旨である。そして、回転速度NEが復帰回転速度N3以下となるまで待機する(ステップS60)。ここで、復帰回転速度N3は、アイドル時の目標回転速度Niよりも高い回転速度に設定されている。そして、復帰回転速度N3以下となることで、ステップS62に移行し、燃焼制御を再開して燃料カットフラグFfを「0」とする(ステップS62)。
【0098】
これに対し、上記ステップ56において肯定判断される場合、ステップ64においてアシスト処理を実行する旨、表示器70を用いて通知する。この処理は、先の図7のステップS44における通知処理と同趣旨である。そして、回転速度NEが復帰回転速度N4となるまで待機する(ステップS66)。ここで、復帰回転速度N4は、目標回転速度Ni以下の回転速度に設定されている。そして、復帰回転速度N4以下となることで、ステップS68に移行し、燃料復帰アシスト処理を実行する。すなわち、開閉制御用スイッチング素子50を通じてリレー48を操作することで、バッテリ46の正極側を中性点Nに接続し、先の図4に示した態様にてスイッチング素子S¥#を操作する。また、燃料カットフラグFfを「0」とする。この処理は、エンジン10の回転速度NEが目標回転速度Niで安定することと、スロットルグリップ58の操作に従ってアイドル制御が終了することとについて、それらの論理和が真となるまで実行される(ステップS70)。ここで、スロットルグリップ58の操作に従ってアイドル制御が終了することは、車両の駆動トルクに関するユーザの要求が増大すると判断される条件である。そして、論理和が真となると、ステップS72においてエンジン10の燃焼制御を開始し、燃料復帰アシスト処理を終了することで始動発電機40を用いた発電処理に移行する。
【0099】
なお、上記ステップS62,S72の処理が完了する場合や、ステップS52において否定判断される場合には、この一連の処理を一旦終了する。
「チェンジオブマインドアシスト処理」
これは、アイドルストップ制御によってエンジン10の燃焼制御が停止された直後にユーザによる再発進の意思が確認される場合にこれに速やかに応じるためのものである。この処理を説明するに先立って、まず本実施形態にかかるアイドルストップ制御について説明する。
【0100】
図9に、本実施形態にかかるアイドルストップ制御の処理手順を示す。この処理は、制御装置56によって、たとえば所定周期でくり返し実行される。
【0101】
この一連の処理では、まずステップS80において、エンジン10の自動停止処理がなされている旨の停止フラグFiが「1」であるか否かを判断する。そして、ステップS80において否定判断される場合、ステップS82において、車速がゼロの状態が規定時間継続したか否かを判断する。この処理は、エンジン10の自動停止処理を実行するか否かを判断するためのものである。ここで、車速がゼロの状態が規定時間継続するとの条件は、ユーザに停車意思があると判断する条件である。そして、ステップS82において肯定判断される場合、ステップS84において、エンジン10の燃焼制御を停止するとともに、停止フラグFiを「1」とする。
【0102】
これに対し、上記ステップS80において肯定判断される場合や、ステップS84の処理が完了する場合には、ステップS86において、発進要求があるか否かを判断する。これは、たとえばスロットルバルブ16の開口度θが増大するか否かによって判断すればよい。そして、発進意思があると判断される場合、ステップS88において、自動始動処理を行なうとともに、停止フラグFiを「0」とする。ちなみに、自動始動処理は、先の図6に示した処理となる。
【0103】
なお、上記ステップS88の処理が完了する場合や、ステップS82,S86において否定判断される場合には、この一連の処理を一旦終了する。
【0104】
図10に、本実施形態にかかるチェンジオブマインドアシスト処理の手順を示す。この処理は、制御装置56によって、たとえば所定周期で繰り返し実行される。
【0105】
この一連の処理では、まずステップS90において停止フラグFiが「1」から「0」に切り替わるか否かを判断する。この処理は、チェンジオブマインドアシスト処理を実行するか否かを判断するためのものである。
【0106】
ステップS90において肯定判断される場合、ステップS92において、回転速度NEが下限速度NthL以下であるか否かを判断し、下限速度NthL以下である場合、ステップS94において、先の図6のステップS24と同様の処理を行なう。これに対し、回転速度NEが下限速度Nthを上回る場合、ステップS96に移行し、開閉制御用スイッチング素子50を通じてリレー48を操作することで、バッテリ46の正極側を中性点Nに接続し、先の図4に示した態様にてスイッチング素子S¥#を操作する。ちなみに、アイドルストップ制御によってエンジン10の燃焼制御が停止された直後にユーザによる再発進の意思が確認される場合、発進の意思が確認された直後においてもステップS92において否定判断されることとなる。
【0107】
そして、ステップS98では、ステップS96の処理の実行期間を計時するカウンタの計時動作を行なう。そして、ステップS100においては、カウンタ値Tが閾値時間Tth以上となることとスロットルグリップ58の操作に従ってアイドル制御が終了することとについて、それらの論理和が真であるか否かを判断する。この処理は、燃焼制御を開始し、また昇圧処理を停止するか否かを判断するためのものである。ここで、本実施形態では、先の図6のステップS30と同様の趣旨で、閾値時間Tthを、バッテリ46の端子電圧Vbが高いほど長く設定する。そして、ステップS100において肯定判断される場合、ステップS102において、チェンジオブマインドアシスト処理を終了する。
【0108】
なお、上記ステップS102の処理が完了する場合や、ステップS90において否定判断される場合には、この一連の処理を一旦終了する。
上記チェンジオブマインドアシスト処理によれば、アイドルストップ制御によってエンジン10の燃焼制御が停止された直後にユーザによる再発進の意思が確認される場合、始動発電機40によるトルクによってクランク軸30の回転速度NEが目標回転速度Niにて安定化される。この処理は、インバータINVの入力電圧を端子電圧Vbとした場合にトルクが生成できなくなる回転速度領域におけるものであることから、昇圧制御を行わない場合にはなしえなかったものである。
<第2の実施形態>
以下、第2の実施形態について、先の第1の実施形態との相違点を中心に図面を参照しつつ説明する。
【0109】
本実施形態では、先の第1の実施形態と比較して排気量が大きいエンジン10を想定する。この場合、昇圧処理を行なったとしても、始動発電機40は、燃焼制御を行なうことなくアイドル時の目標回転速度Niを維持するために要するトルクを生成できない。しかし、この場合であっても、昇圧を利用した始動アシスト処理を行なうことで、発電機としての用途が主の始動発電機40の設計変更をすることなく、エンジン10を始動させることができる。
【0110】
図11に、本実施形態にかかる始動アシスト処理の手順を示す。この処理は、制御装置56によってたとえば所定周期で繰り返し実行される。なお、図11において、先の図6に示した処理に対応するものについては、便宜上同一のステップ番号を付している。
【0111】
この一連の処理では、圧縮上死点を通過することを、始動アシスト処理の終了条件とする(ステップS30a)。そして、始動アシスト処理が終了すると、ステップS32において、燃焼制御を開始する。なお、ここでの燃焼制御の開始とは、点火プラグ26による点火操作の開始(圧縮上死点から数°遅角したタイミングでの点火)を意味し、燃料噴射弁20を介した燃料の噴射に関しては、始動アシスト処理の実行期間において開始される。これにより、圧縮行程を通過した後の最初の燃焼行程において混合気を燃焼させることができる。もっとも、これに代えて、始動アシスト処理の終了後の最初の圧縮行程に先立って燃料噴射を開始して且つ、圧縮行程において点火操作を開始してもよい。
<その他の実施形態>
なお、上記各実施形態は、以下のように変更して実施してもよい。
【0112】
「燃料復帰アシスト手段について」
トルクアシストを実施する場合の復帰回転速度N4としては、アイドリング時の目標回転速度Ni以下の回転速度に限らず、たとえば目標回転速度Niよりも僅かに高い回転速度であってもよい。また、復帰回転速度を1段階で変化させる代わりに、充電率に応じて連続的に変更してもよい。この際、充電率が低い場合には、燃料復帰アシスト処理を要求しない値まで復帰回転速度を上昇させることが望ましい。
【0113】
上記実施形態では、エンジン10の回転速度NEがアイドリング時の目標回転速度Niにて安定することを条件に燃焼制御を開始したがこれに限らない。たとえば燃焼によってエンジン10の自立運転が可能となると想定される回転速度に達することを条件に燃焼制御を開始してもよい。なお、この場合、回転速度NEがアイドリング時の目標回転速度Niに達する前であっても、燃焼制御が開始されることでトルクアシストを終了してもよい。
【0114】
なお、減速回生時においてはバッテリ46が充電される一方、フューエルカット制御は減速回生時においてなされるものであることに鑑みれば、減速回生時の充電エネルギ量の消費に制限する条件で、充電率に関係なくフューエルカット制御からの復帰に際し常にトルクアシストを実施してもよい。
また、駆動トルクに関するユーザの要求が所定以下であるか否かの判断としては、スロットルバルブ16の開口度θに基づくものに限らず、たとえば先の図1に示すブレーキ62の操作によって判断するものであってもよい。
【0115】
「アイドリングストップ制御について」
実行条件としては、車速がゼロとなることを条件とすることなく、ゼロよりも大きい規定速度以下となることを条件としてもよい。
【0116】
上記実施形態では、スロットルグリップ58の操作(スロットルバルブ16の開口度θの変化)によって発進意思の有無を判断し、これに基づき自動始動処理を行ったが、これに限らない。たとえば、ユーザによって操作可能な自動始動指示スイッチを別途備え、このスイッチの操作に基づき発進意思の有無を判断し、自動始動処理を行ってもよい。
【0117】
「チェンジオブマインド手段について」
トルクアシストの実行期間の長さを可変設定する可変手段としては、実行期間を継続時間(カウンタT)にて設定するものに限らず、回転速度NEにて設定するものであってもよい。
【0118】
上記実施形態では、バッテリ46の充電率に応じてチェンジオブマインドに際してのトルクアシストの実行期間の長さを可変とした(可変手段を備えた)が、これに限らず、たとえば、エンジン10の回転速度NEが燃焼制御によって自立運転可能な回転速度に達するまでの期間に固定してもよい。
【0119】
「加速要求判断手段について」
上記実施形態では、回転速度の変動量ΔNEが規定量Δth以下である旨の条件と、スロットルバルブ16の開口度θが閾値開度θth以上である旨の条件と、開口度の変化速度Δθが閾値速度Δθth以上である旨の条件との論理積が真であることを、加速要求ありと判断したがこれに限らない。たとえば、開口度の変化速度Δθが閾値速度Δθth以上である旨の条件のみによって加速要求があると判断し、これに基づき加速アシスト処理を実行してもよい。
【0120】
「加速アシスト手段について」
【0121】
上記実施形態では、バッテリ46の充電率に応じて加速アシスト処理の実行の有無を判断したが、これに限らず、たとえば充電率に応じて加速アシスト処理の実行期間の長さを連続的または2段階以上で段階的に可変としてもよい。ここで、実行期間の長さにゼロを含める場合、これは禁止手段を構成する。
【0122】
「始動アシスト手段について」
上記第1の実施形態では、始動アシスト処理の実行期間を時間にて定めたが、エンジン10の回転速度NEにて定めてもよい。この場合、回転速度NEの閾値を高くするほど実行期間が長くなる。
上記第2の実施形態において、昇圧処理の開始タイミングを、圧縮上死点に起因してクランク軸30に加わる負荷トルクが最大となる直前(たとえば360°BTDC)としてもよい。また、「始動発電機のトルクの上限値Tmaxについて」の欄に記載したものであってもよい。
【0123】
「制限トルク付与手段について」
バッテリ46の正極および負極の双方をインバータINVの入力端子に接続して且つ120°通電処理や180°通電処理(PWM処理による電流制限を含む)によって始動発電機40を駆動するものに限らない。たとえば、120°通電処理(PWM処理による電流制限を含む)を採用するものの、180°通電処理(PWM処理による電流制限を含む)についてはこれを採用しないものであってもよい。またたとえば、180°通電処理(PWM処理による電流制限を含む)を採用するものの、120°通電処理(PWM処理による電流制限を含む)についてはこれを採用しないものであってもよい。さらにたとえば、バッテリ46を始動発電機40の中性点に接続したとしても、昇圧処理のためのDutyの値によっては、昇圧によるトルクの増大効果よりもPWM処理によるトルクの低減効果が大きくなることに鑑み、Duty制限によってトルクを上限値Tmax以下に制限しつつトルクアシストを実行してもよい。
【0124】
「トルクアシストに関するマンマシーンインターフェースについて」
キャンセルスイッチ62によってキャンセル可能なものとしては、加速アシスト処理および燃料復帰アシスト処理に限らない。たとえばこれらのうちのいずれか一方のみとしてもよい。また、チェンジオブマインドアシスト処理を加えたり、始動アシスト処理を始動に必要な最小限の期間よりも長くする処理を加えたりしてもよい。もっとも、キャンセル可能な構成自体必須ではない。
【0125】
トルクアシストの実行の有無の通知手段としては、表示器70に限らず、音声であってもよい。
【0126】
トルクアシストの実行の有無の通知対象としては、加速アシスト処理および燃料復帰アシスト処理に限らない。たとえば、始動アシスト処理を始動に必要な最小限の期間よりも長くする処理を加えてもよい。もっとも、始動発電機40によるトルクによってクランク軸30の回転をアシストする処理の実行期間の全てにおいて通知してもよい。
【0127】
トルクアシストの実行の有無の通知手法としては、実施通知と、やりうることについて未実施の場合の未実施通知との双方を各別の信号として通知するものに限らない。たとえば実施のみを通知するものであってもよい。
【0128】
また、バッテリ46の充電率に基づき、トルクアシストの実行が可能か否かを常時通知するものであってもよい。
【0129】
「始動発電機のトルク制御について」
上記発明では、180°通電処理(または昇圧処理)または120°通電処理(PWM処理による電流制限を含む)によって実現されるトルクに制御したが、これに限らない。たとえば正弦波制御を実行してもよい。この場合、昇圧制御としては、たとえば特開2010−28941に記載されているように、下側アームの短絡期間と上側アームの短絡期間との合計期間に対する下側アームの短絡期間の時比率によって昇圧率を制御すればよい。
【0130】
「昇圧制御手段について」
昇圧制御手法としては、上記実施形態で例示したものに限らないことについては、「始動発電機のトルク制御について」の欄に記載したとおりである。
【0131】
「中性点とバッテリ46との接続手法について」
たとえば、バッテリ46の正極をインバータINVの正極側の入力端子に接続し、バッテリ46の負極側を中性点に接続するとともに、中性点とインバータINVの負極側の入力端子との間にコンデンサを接続してもよい。この場合、コンデンサ42を削除することができ、インバータINVの一対の入力端子間に接続される直流電圧源は、バッテリ46とコンデンサとの直列接続体となり、昇圧制御によってコンデンサの充電電圧を増大させることで直流電圧源の電圧を昇圧する。なお、この場合、上側アームのスイッチング素子S¥pのオンとすべき期間において昇圧のためのPWM処理を実行する。
【0132】
「切替手段、切替制御手段について」
バッテリ46の正極および負極の双方をインバータINVの入力端子に接続する第2接続状態を実現する構成(切替手段)を備えなくてもよい。この場合、インバータINVの一対の入力端子のいずれかおよび中性点間にバッテリ46の一対の端子を接続する第1接続状態によってバッテリ46の充電処理を実行すればよい。
また、切替手段としては、リレー48に限らず、半導体スイッチ等であってもよい。
【0133】
「内燃機関について」
単気筒内燃機関に限らず、たとえば2気筒等、複数気筒を有するものであってもよい。この場合、始動時に要求されるトルクがさらに大きくなりうるが、この場合であっても、始動発電機40の体格を発電性能によって要求される必要最小限の大きさを極力越えないものとしつつも始動処理を実現可能とするうえでは、上記実施形態の要領で昇圧電圧を利用することが有効である。ちなみに、この論理は、内燃機関を筒内噴射式のガソリン機関や圧縮着火式内燃機関(ディーゼル機関等)に変更することに対しても成立する。
【0134】
「始動発電機について」
上記実施形態では、停止状態から圧縮乗り越えを行なう場合に要するトルクが上限値Tmaxよりも大きいものを採用したが、これに限らず、小さいものであってもよい。また、昇圧を行わない場合に生成可能なトルクがゼロとなる回転速度の最低値が目標回転速度Niよりも小さいものを採用したに限らず、たとえば目標回転速度Niよりも大きいものであってもよい。この場合であっても、発電機のみの要求に応じたものから体格の大型化等を極力抑制しつつ始動性の向上や燃料消費率の低下等を図る上では、昇圧処理を行なうことは有効である。
【0135】
また、SPMに限らず、たとえば埋め込み磁石同期機(IPM)等であってもよい。
【0136】
「始動発電機の回転子とクランク軸40との連結について」
回転速度比1に限らない。ちなみに、クランク軸40の回転速度に対して回転子の回転速度の方が高くなる設定とするなら、始動発電機の極対数を低減しても、始動アシスト処理等を的確に行なうことが容易となる。
【0137】
「始動発電機のトルクの上限値Tmaxについて」
上記実施形態では、始動発電機40に流せる電流(連続定格電流)のために、上限値Tmax以上のトルクを生成できないとしたが、これに限らない。たとえば、上限値Tmaxに対応する電流(連続定格電流)を超えることで、インバータINVを構成するスイッチング素子S¥#が発熱限界に達し信頼性の低下が懸念されることから、上限値Tmax以下に制御する仕様であってもよい。ここでは、インバータINVの連続定格電流が発電時に要求される電流を極力超えないように設定されることが、インバータINVの小型化の観点から望ましい。
なお、いずれにせよ、連続定格電流に基づき上限値Tmaxが定まることに鑑みれば、エンジン10の始動に際し始動発電機40やインバータINVの発熱量が上限値に達する以前の短時間に限って上限値Tmaxを上回るトルクを生成する制御を行なうことも可能となり得る。このため、上限値Tmaxが一定である回転速度領域において、昇圧処理によって上限値Tmaxを超えるトルクを生成することで圧縮上死点を通過させて始動性を向上させるようにしてもよい。なお、この場合、トルクアシストを継続することが困難なため、たとえば圧縮上死点に起因してクランク軸30に加わる負荷トルクが最大となる直前から圧縮上死点を通過するまでの規定期間に限ってトルクアシストを行えばよい。ただし、圧縮上死点を通過する直前の回転速度NEが過度に低いと、燃焼制御を良好に開始することができないおそれがあるため、この場合には、上記規定期間となる都度、トルクアシストを行なうことでクランク軸30を加速し、回転速度NEが燃焼制御を良好に行なうことができる速度となった時点で燃焼制御を開始することが望ましい。
【0138】
「直流交流変換回路について」
先の図1に例示したものに限らず、たとえば上側アームのスイッチング素子S¥pをPチャネルMOS電界効果トランジスタとしてもよい。また、スイッチング素子S¥#としては、電界効果トランジスタに限らず、たとえば絶縁ゲートバイポーラトランジスタ(IGBT)等であってもよい。
【0139】
「充電率の定量化手法について」
端子電圧Vbを充電率を一義的に定めるパラメータとみなす手法に限らない。たとえば、イグニッションスイッチ52がオンされた直後の端子電圧Vbと、それ以降のバッテリ46の充放電電流量の収支とに基づき充電率を定量化してもよい。ここで、イグニッションスイッチ52がオンされた直後の端子電圧Vbは、開放端電圧とみなすことができ、バッテリ46の分極や内部抵抗による電圧降下の影響をほとんど受けないことから、充電率を高精度に表現するパラメータである。このため、充電率の初期値を上記端子電圧Vbによって定量化して且つ、上記収支に基づきこれを更新することで現在の充電率を見積もることができる。なお、開放端電圧に近似した端子電圧を検出するタイミングとしては、イグニッションスイッチ52がオンされた直後に限らない。たとえばスイングバック制御時やスイングバック制御から正転し始めたときであってもよい。これは、この期間におけるバッテリ46の放電電流が小さいと想定されることによる。また、開放端電圧に近似した端子電圧Vbを直接検出するものに限らず、スイングバック時やスイングバックから正転し始めたときの回転速度NEによって間接的に検出するものであってもよい。これは、120°通電等、電圧利用率が固定された制御を行なう場合、回転速度NEやその変化がインバータINVの入力電圧に応じて変動することに鑑みたものである。
【0140】
もっとも、始動に際して充電率の初期値を定めるものに限らず、端子電圧Vbが開放端電圧に近似するタイミングとなる都度、充電率の定量値を更新するようにしてもよい。ここで、開放端電圧に近似するタイミングとしては、たとえば先の図5のステップS18のゼロトルク制御時等が考えられる。この際、たとえばライトを点灯していない等の条件を付与することが望ましい。
【0141】
また、これに代えて、端子電圧Vbの複数のサンプリング値に基づき、充電率を定量化するものであってもよい。これは、たとえばバッテリ46の端子電圧Vbの所定期間における最大値、最小値、平均値、および最大値と最小値との差等の変動値の少なくとも1つとしたり、エンジン10の所定の運転状態においてバッテリ46を充電する際のバッテリ46の電圧の上昇度合い等としたりすればよい。ここで、バッテリ46の電圧の上昇度合いは、上昇量が所定量となるまでの所要時間や、所定時間内の上昇量によって定量化することができる。
【0142】
「車両について」
自動2輪車に限らず、たとえば後輪が2つある自動3輪車等であってもよい。こうした場合であっても、バッテリ46の充電用の始動発電機を内燃機関の始動等において電動機として併用する用途等において、充電用のものに対する要求以上の要求を極力回避するうえでは、本発明の適用が有効である。
【0143】
「そのほか」
始動発電機40とインバータINVとの間を開閉する開閉手段を備えてもよい。この場合、発電を行わないときには開閉手段を開状態とすることで、始動発電機40からクランク軸30に加えられる負荷トルクを、機械的な要因によるものを除き、ゼロとすることができる。しかしこの場合であっても、始動アシスト処理等において燃焼制御を遅らせることは燃料消費率の大きい領域で燃焼制御がなされることを極力抑制することができるため、燃料消費量を低減するうえで有効ではある。
発電処理を行なう条件としては、先の図5に例示したものに限らない。たとえば図5のステップS10における回転速度NEの条件として、目標回転速度Niよりも高い規定速度以上であることとしてもよい。
【符号の説明】
【0144】
10…エンジン、40…始動発電機、40u,40v,40w…固定子巻線、42…コンデンサ(直流電圧源の一実施形態)、46…バッテリ、56…制御装置。
【特許請求の範囲】
【請求項1】
内燃機関のクランク軸の回転エネルギを電気エネルギに変換してバッテリに充電するための始動発電機について、該始動発電機を制御対象とする始動発電機の制御装置において、
前記始動発電機は、固定子巻線同士が中性点で接続されたものであり、
前記始動発電機には、コンデンサを備えた直流電圧源の正極および負極のそれぞれと前記始動発電機の各固定子巻線との間を開閉するスイッチング素子を備える直流交流変換回路が接続され、
前記中性点と前記バッテリとが接続された状態で、前記直流交流変換回路を構成する前記スイッチング素子の操作によって前記直流電圧源の電圧を前記バッテリの電圧に対して昇圧する昇圧制御手段と、
前記昇圧制御手段によって前記直流電圧源の電圧が前記バッテリの電圧よりも高くなっている状態で前記直流交流変換回路を構成する前記スイッチング素子を操作することで、前記始動発電機を電動機として利用して前記クランク軸にトルクを付与するトルク付与手段とを備えることを特徴とする始動発電機の制御装置。
【請求項2】
前記クランク軸の回転速度をアイドリング時の目標値に制御するアイドル回転速度制御手段を備え、
前記直流交流変換回路の入力電圧を前記バッテリの端子電圧とした場合に生成可能な前記始動発電機のトルクが、前記クランク軸の回転速度をゼロから前記目標値まで上昇させるのに要するトルクよりも小さいことを特徴とする請求項1記載の始動発電機の制御装置。
【請求項3】
車両を駆動するためのトルクに関するユーザの要求が所定以下であることに基づき前記内燃機関の燃焼制御を停止する停止手段と、
該停止手段による停止処理がなされているとき、前記内燃機関の回転速度が復帰回転速度以下となることで前記燃焼制御を開始する復帰手段とを備え、
前記トルク付与手段は、前記復帰手段によって燃焼制御が開始される場合、前記トルクを付与する処理としての燃料復帰アシスト処理を行なう燃料復帰アシスト手段を備えることを特徴とする請求項1または2記載の始動発電機の制御装置。
【請求項4】
前記復帰手段は、前記バッテリの充電率が高い場合、前記復帰回転速度を低下させるものであることを特徴とする請求項3記載の始動発電機の制御装置。
【請求項5】
前記クランク軸の回転速度をアイドリング時の目標値に制御するアイドル回転速度制御手段を備え、
前記燃料復帰アシスト手段は、前記クランク軸の回転速度が前記目標値にて安定することと車両の駆動トルクに関するユーザの要求が増大することとの論理和条件が真となることを条件に前記燃料復帰アシスト処理を停止することを特徴とする請求項3または4記載の始動発電機の制御装置。
【請求項6】
ユーザによる車両の停車意思に基づき、前記内燃機関の燃焼制御を停止する自動停止処理を行なう自動停止処理手段と、
前記自動停止処理の後、ユーザによる車両の発進意思に基づき、前記内燃機関の燃焼制御を開始する自動始動処理を行なう自動始動処理手段とを備え、
前記トルク付与手段は、前記自動停止処理によって前記クランク軸の回転速度がゼロに向けて低下している状況下、前記自動始動処理が要求される場合、前記トルクを付与する処理としてのチェンジオブマインドアシスト処理を行なうチェンジオブマインドアシスト手段を備えることを特徴とする請求項1〜5のいずれか1項に記載の始動発電機の制御装置。
【請求項7】
前記チェンジオブマインドアシスト手段は、前記クランク軸の回転速度が規定速度以上であることを条件に、前記昇圧制御手段によって昇圧された前記直流電圧源の電圧を利用するものであって且つ、前記クランク軸の回転速度が規定速度未満である場合、前記チェンジオブマインドアシスト処理として、前記直流電圧源の電圧を制限しつつ前記始動発電機を電動機として利用することで、前記クランク軸にトルクを付与する制限トルク付与処理を行なう制限トルク付与手段を備えることを特徴とする請求項6記載の始動発電機の制御装置。
【請求項8】
前記チェンジオブマインドアシスト手段は、前記バッテリの充電率が高いほど前記チェンジオブマインドアシスト処理の実行期間を長く設定する可変手段を備えることを特徴とする請求項6または7記載の始動発電機の制御装置。
【請求項9】
車両を駆動するトルクの増大要求の有無を判断する加速要求判断手段を備え、
前記トルク付与手段は、前記トルクの増大要求があると判断される場合、前記トルクを付与する処理としての加速アシスト処理を行なう加速アシスト手段を備えることを特徴とする請求項1〜8のいずれか1項に記載の始動発電機の制御装置。
【請求項10】
前記バッテリの充電率が低い場合、前記加速アシスト処理を禁止する禁止手段を備えることを特徴とする請求項9記載の始動発電機の制御装置。
【請求項11】
前記トルク付与手段は、前記内燃機関の始動要求に応じて前記トルクを付与する処理としての始動アシスト処理を行なう始動アシスト手段を備えることを特徴とする請求項1〜10のいずれか1項に記載の始動発電機の制御装置。
【請求項12】
前記始動アシスト手段は、前記クランク軸の回転速度が規定速度以上であることを条件に、前記昇圧制御手段によって昇圧された前記直流電圧源の電圧を利用するものであって且つ、前記クランク軸の回転速度が規定速度未満である場合、前記始動アシスト処理として、前記直流電圧源の電圧を制限しつつ前記始動発電機を電動機として利用することで、前記クランク軸にトルクを付与する制限トルク付与処理を行なう制限トルク付与手段を備えることを特徴とする請求項11記載の始動発電機の制御装置。
【請求項13】
前記始動アシスト手段は、前記始動アシスト処理の実行期間の長さを前記バッテリの充電率が高いほど長く設定する可変手段を備えることを特徴とする請求項11または12記載の始動発電機の制御装置。
【請求項14】
前記内燃機関は、4ストロークエンジンであり、
前記始動アシスト手段は、圧縮行程に起因して前記クランク軸に加わる負荷トルクが極大となる期間を通過したことを前記始動アシスト処理の終了条件とすることを特徴とする請求項11または12記載の始動発電機の制御装置。
【請求項15】
前記直流交流変換回路の正極側および負極側の一対の入力端子のいずれかおよび前記中性点と前記バッテリの正極および負極の一対の端子とを接続する第1接続状態と、前記直流交流変換回路の一対の入力端子と前記バッテリの一対の端子とを接続する第2接続状態とを切り替える切替手段と、
前記クランク軸の回転エネルギを電気エネルギに変換してバッテリに充電する場合、前記第2接続状態として且つ、前記昇圧制御手段による制御の開始に先立ち前記第1接続状態とすべく前記切替手段を操作する切替制御手段とをさらに備えることを特徴とする請求項1〜14のいずれか1項に記載の始動発電機の制御装置。
【請求項16】
前記昇圧制御手段は、前記直流交流変換回路を構成するスイッチング素子のうち前記直流電圧源の正極側に接続されるものおよび負極側に接続されるもののそれぞれについてのオン状態となりうる期間であるベースオン期間が、前記固定子巻線のそれぞれで互いに等しい長さとされて且つ、前記固定子巻線毎に各別の位相に設定されるに際し、前記正極側に接続されるスイッチング素子および前記負極側に接続されるスイッチング素子のいずれかを前記ベースオン期間において周期的にオンオフ操作するものであることを特徴とする請求項1〜15のいずれか1項に記載の始動発電機の制御装置。
【請求項1】
内燃機関のクランク軸の回転エネルギを電気エネルギに変換してバッテリに充電するための始動発電機について、該始動発電機を制御対象とする始動発電機の制御装置において、
前記始動発電機は、固定子巻線同士が中性点で接続されたものであり、
前記始動発電機には、コンデンサを備えた直流電圧源の正極および負極のそれぞれと前記始動発電機の各固定子巻線との間を開閉するスイッチング素子を備える直流交流変換回路が接続され、
前記中性点と前記バッテリとが接続された状態で、前記直流交流変換回路を構成する前記スイッチング素子の操作によって前記直流電圧源の電圧を前記バッテリの電圧に対して昇圧する昇圧制御手段と、
前記昇圧制御手段によって前記直流電圧源の電圧が前記バッテリの電圧よりも高くなっている状態で前記直流交流変換回路を構成する前記スイッチング素子を操作することで、前記始動発電機を電動機として利用して前記クランク軸にトルクを付与するトルク付与手段とを備えることを特徴とする始動発電機の制御装置。
【請求項2】
前記クランク軸の回転速度をアイドリング時の目標値に制御するアイドル回転速度制御手段を備え、
前記直流交流変換回路の入力電圧を前記バッテリの端子電圧とした場合に生成可能な前記始動発電機のトルクが、前記クランク軸の回転速度をゼロから前記目標値まで上昇させるのに要するトルクよりも小さいことを特徴とする請求項1記載の始動発電機の制御装置。
【請求項3】
車両を駆動するためのトルクに関するユーザの要求が所定以下であることに基づき前記内燃機関の燃焼制御を停止する停止手段と、
該停止手段による停止処理がなされているとき、前記内燃機関の回転速度が復帰回転速度以下となることで前記燃焼制御を開始する復帰手段とを備え、
前記トルク付与手段は、前記復帰手段によって燃焼制御が開始される場合、前記トルクを付与する処理としての燃料復帰アシスト処理を行なう燃料復帰アシスト手段を備えることを特徴とする請求項1または2記載の始動発電機の制御装置。
【請求項4】
前記復帰手段は、前記バッテリの充電率が高い場合、前記復帰回転速度を低下させるものであることを特徴とする請求項3記載の始動発電機の制御装置。
【請求項5】
前記クランク軸の回転速度をアイドリング時の目標値に制御するアイドル回転速度制御手段を備え、
前記燃料復帰アシスト手段は、前記クランク軸の回転速度が前記目標値にて安定することと車両の駆動トルクに関するユーザの要求が増大することとの論理和条件が真となることを条件に前記燃料復帰アシスト処理を停止することを特徴とする請求項3または4記載の始動発電機の制御装置。
【請求項6】
ユーザによる車両の停車意思に基づき、前記内燃機関の燃焼制御を停止する自動停止処理を行なう自動停止処理手段と、
前記自動停止処理の後、ユーザによる車両の発進意思に基づき、前記内燃機関の燃焼制御を開始する自動始動処理を行なう自動始動処理手段とを備え、
前記トルク付与手段は、前記自動停止処理によって前記クランク軸の回転速度がゼロに向けて低下している状況下、前記自動始動処理が要求される場合、前記トルクを付与する処理としてのチェンジオブマインドアシスト処理を行なうチェンジオブマインドアシスト手段を備えることを特徴とする請求項1〜5のいずれか1項に記載の始動発電機の制御装置。
【請求項7】
前記チェンジオブマインドアシスト手段は、前記クランク軸の回転速度が規定速度以上であることを条件に、前記昇圧制御手段によって昇圧された前記直流電圧源の電圧を利用するものであって且つ、前記クランク軸の回転速度が規定速度未満である場合、前記チェンジオブマインドアシスト処理として、前記直流電圧源の電圧を制限しつつ前記始動発電機を電動機として利用することで、前記クランク軸にトルクを付与する制限トルク付与処理を行なう制限トルク付与手段を備えることを特徴とする請求項6記載の始動発電機の制御装置。
【請求項8】
前記チェンジオブマインドアシスト手段は、前記バッテリの充電率が高いほど前記チェンジオブマインドアシスト処理の実行期間を長く設定する可変手段を備えることを特徴とする請求項6または7記載の始動発電機の制御装置。
【請求項9】
車両を駆動するトルクの増大要求の有無を判断する加速要求判断手段を備え、
前記トルク付与手段は、前記トルクの増大要求があると判断される場合、前記トルクを付与する処理としての加速アシスト処理を行なう加速アシスト手段を備えることを特徴とする請求項1〜8のいずれか1項に記載の始動発電機の制御装置。
【請求項10】
前記バッテリの充電率が低い場合、前記加速アシスト処理を禁止する禁止手段を備えることを特徴とする請求項9記載の始動発電機の制御装置。
【請求項11】
前記トルク付与手段は、前記内燃機関の始動要求に応じて前記トルクを付与する処理としての始動アシスト処理を行なう始動アシスト手段を備えることを特徴とする請求項1〜10のいずれか1項に記載の始動発電機の制御装置。
【請求項12】
前記始動アシスト手段は、前記クランク軸の回転速度が規定速度以上であることを条件に、前記昇圧制御手段によって昇圧された前記直流電圧源の電圧を利用するものであって且つ、前記クランク軸の回転速度が規定速度未満である場合、前記始動アシスト処理として、前記直流電圧源の電圧を制限しつつ前記始動発電機を電動機として利用することで、前記クランク軸にトルクを付与する制限トルク付与処理を行なう制限トルク付与手段を備えることを特徴とする請求項11記載の始動発電機の制御装置。
【請求項13】
前記始動アシスト手段は、前記始動アシスト処理の実行期間の長さを前記バッテリの充電率が高いほど長く設定する可変手段を備えることを特徴とする請求項11または12記載の始動発電機の制御装置。
【請求項14】
前記内燃機関は、4ストロークエンジンであり、
前記始動アシスト手段は、圧縮行程に起因して前記クランク軸に加わる負荷トルクが極大となる期間を通過したことを前記始動アシスト処理の終了条件とすることを特徴とする請求項11または12記載の始動発電機の制御装置。
【請求項15】
前記直流交流変換回路の正極側および負極側の一対の入力端子のいずれかおよび前記中性点と前記バッテリの正極および負極の一対の端子とを接続する第1接続状態と、前記直流交流変換回路の一対の入力端子と前記バッテリの一対の端子とを接続する第2接続状態とを切り替える切替手段と、
前記クランク軸の回転エネルギを電気エネルギに変換してバッテリに充電する場合、前記第2接続状態として且つ、前記昇圧制御手段による制御の開始に先立ち前記第1接続状態とすべく前記切替手段を操作する切替制御手段とをさらに備えることを特徴とする請求項1〜14のいずれか1項に記載の始動発電機の制御装置。
【請求項16】
前記昇圧制御手段は、前記直流交流変換回路を構成するスイッチング素子のうち前記直流電圧源の正極側に接続されるものおよび負極側に接続されるもののそれぞれについてのオン状態となりうる期間であるベースオン期間が、前記固定子巻線のそれぞれで互いに等しい長さとされて且つ、前記固定子巻線毎に各別の位相に設定されるに際し、前記正極側に接続されるスイッチング素子および前記負極側に接続されるスイッチング素子のいずれかを前記ベースオン期間において周期的にオンオフ操作するものであることを特徴とする請求項1〜15のいずれか1項に記載の始動発電機の制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−92097(P2013−92097A)
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願番号】特願2011−234307(P2011−234307)
【出願日】平成23年10月25日(2011.10.25)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成25年5月16日(2013.5.16)
【国際特許分類】
【出願日】平成23年10月25日(2011.10.25)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]