
姿勢制御付き無人二輪車
【課題】 無人二輪車の走行において、車体の傾斜角速度と旋回角速度を検出して傾斜角、傾斜角速度、旋回角速度及び走行速度を要素とする操舵角を算出し、この操舵角で転倒も蛇行もしないように走行させる。
【解決手段】 操舵電動機で操舵される操舵車輪と、駆動電動機で駆動される駆動車輪を装備した姿勢制御付き無人二輪車であり、車体に、車体の傾斜角速度を検出する傾斜角速度センサと旋回角速度を検出する旋回角速度センサを取り付けるとともに、傾斜角速度センサの出力によって車体の傾斜角と傾斜角速度及び走行速度の関数である姿勢制御の操舵角μ1 と、旋回角速度センサの出力によって旋回時における車体の旋回角速度と走行速度の関数である操舵制御の操舵角μ2 とをそれぞれ算出し、操舵車輪を各操舵角μ1 、μ2 の極性付加算である総合姿勢制御の操舵角μで操舵しながら走行させる。
【解決手段】 操舵電動機で操舵される操舵車輪と、駆動電動機で駆動される駆動車輪を装備した姿勢制御付き無人二輪車であり、車体に、車体の傾斜角速度を検出する傾斜角速度センサと旋回角速度を検出する旋回角速度センサを取り付けるとともに、傾斜角速度センサの出力によって車体の傾斜角と傾斜角速度及び走行速度の関数である姿勢制御の操舵角μ1 と、旋回角速度センサの出力によって旋回時における車体の旋回角速度と走行速度の関数である操舵制御の操舵角μ2 とをそれぞれ算出し、操舵車輪を各操舵角μ1 、μ2 の極性付加算である総合姿勢制御の操舵角μで操舵しながら走行させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、予め定められたプログラム、無線機による指示或いは地上に引かれたラインに沿って無人二輪車を所定の方向に蛇行することなく走行させる姿勢制御付き無人二輪車に関するものである。
【背景技術】
【0002】
二輪車は四輪車と違って適切なハンドル操作(操舵)を行わなければ転倒する。人が乗る場合は、無意識の感で体重移動とハンドル操作によって転倒することなく、走行させることができる。しかし、無人で走行させる場合には、何らかの姿勢制御を行わなければ転倒する。この種の無人二輪車は、興趣のある高度な玩具として或いはリアルタイムのメカニカル制御の教材として望まれている。この点で、概念的ではあるが、無人二輪車の姿勢制御について幾つかの先行技術が提案されている。
【0003】
特許文献1には、操舵車輪の操舵角を指令できる制御部を備えるとともに、車体が傾斜するときの角速度を検出する角速度センサを設け、走行中の車体の傾斜角速度の偏差を減少させるように操舵車輪を制御するものが示されている。しかし、この文献のものは、角速度センサの出力だけを用いて処理しており、姿勢制御にもっとも的確な傾斜角を算出していないため、姿勢制御が不十分という問題がある。また、転倒防止の重要な要件である車体の走行速度の要素が含まれておらず、転倒を防ぐには不十分である。
【0004】
また、特許文献2には、車体の傾斜角(ロール角と述べている)を検出するとともに、任意の角度で操舵できる手段を備え、リモコンから送信されて来る転倒を防ぐための指示ロール角と現在のロール角との偏差を零にするように操舵を行うものが示されている。しかし、操舵角の算出は現在値よりも大きいか小さいかだけであって角度指定ではないため、操舵が不確かである。さらに、この文献のものも、操舵角の算出に走行速度の要素が含まれていない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】実開平08−001268号公報
【特許文献2】WO2004−054678号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、車体の速度を加味することはもちろんのこと、姿勢制御のための操舵角を転倒を防ぐ姿勢制御と走行方向を一定に保つ操舵制御の両方によって求めることで、より正確で安定した操舵ができるようにしたものである。加えて、所望の方向に走行させる場合、その制御のバリエーションを多くしてより興趣を増せるようにしたものである。
【課題を解決するための手段】
【0007】
以上の課題の下、本発明は、請求項1に記載した、操舵電動機で操舵される操舵車輪と、駆動電動機で駆動される駆動車輪を装備した姿勢制御付き無人二輪車であり、車体に、車体の傾斜角速度を検出する傾斜角速度センサと旋回角速度を検出する旋回角速度センサを取り付けるとともに、傾斜角速度センサの出力によって車体の傾斜角と傾斜角速度及び走行速度の関数である姿勢制御の操舵角μ1 と、旋回角速度センサの出力によって旋回時における車体の旋回角速度と走行速度の関数である操舵制御の操舵角μ2 とをそれぞれ算出し、操舵車輪を各操舵角μ1 、μ2 の極性付加算である総合姿勢制御の操舵角μで操舵しながら走行させることを特徴とする姿勢制御付き無人二輪車を提供したものである。
【0008】
また、本発明は、以上の無人二輪車において、請求項2に記載した、姿勢制御の操舵角μ1 を、車体の傾斜角と走行速度の関数である比例制御の操舵角μP と、傾斜角速度と走行速度の関数である微分制御の操舵角μD をそれぞれ算出し、これら操舵角μP 、μD の極性付加算とした手段、請求項3に記載した、走行を直進走行と旋回走行に分類し、直進走行時には、旋回角速度の積分値を零にリセットし、その後、この積分値、すなわち、旋回角が零になるようにして直進性を保持する操舵制御の操舵角μ2 で操舵する直進補正を行う手段を提供する。
【0009】
さらに、本発明は、請求項4に記載した、旋回走行時には、直進補正を外し、操舵制御の操舵角μ2 で操舵することで所定の旋回半径で旋回させ、直進走行に戻ると、再度直進補正を始める手段、請求項5に記載した、姿勢制御付き無人二輪車の走行を、予め組み込んだプログラムからの指示、無線機による指示、地上に引かれたラインを読み取るライントレースセンサからの指示のいずれかで行う手段を提供する。
【発明の効果】
【0010】
請求項1の手段によると、姿勢制御のための総合操舵角として、傾斜角速度センサによって車体の傾斜角と傾斜角速度及び走行速度の関数である姿勢制御の操舵角と、旋回角速度センサによって旋回時における車体の旋回角速度と走行速度の関数である操舵制御の操舵角とを極性付加算したものであるから、直進にしても旋回にしても、所望の方向に蛇行のない安定した姿勢で走行ができる。これにおいて、車体の傾斜角と旋回角に基づく操舵車輪の操舵角を共に角速度センサの出力から算出して求めたものであるから、直接角度を検出する機器よりも出力のレスポンスが鋭いし、非常に安価である。
【0011】
請求項2の手段によると、姿勢制御は傾斜角を要素にする比例制御と傾斜角速度を要素にする微分制御とによったものであるから、より精度の高い姿勢制御ができる。請求項3の手段によると、直進時における直線性が高まり、請求項4の手段によると、旋回時における旋回半径の保持が可能になる。請求項5の手段によると、姿勢制御を行うための操作指令のバリエーションを増やしてより高度で、かつ、興趣の高い姿勢制御付き無人二輪車を提供できる。
【図面の簡単な説明】
【0012】
【図1】本発明に係る姿勢制御付き無人二輪車の側面図である。
【図2】本発明に係る姿勢制御付き無人二輪車の背面図である。
【図3】前輪と後輪の関係を示す説明図
【図4】直進走行と回頭走行についてのフローチャートである。
【図5】本発明に係る姿勢制御のブロック図である。
【発明を実施するための形態】
【0013】
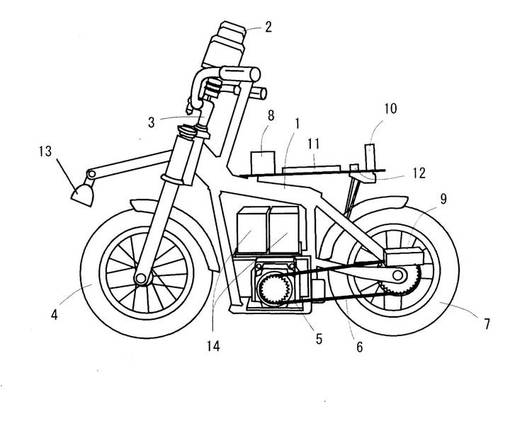
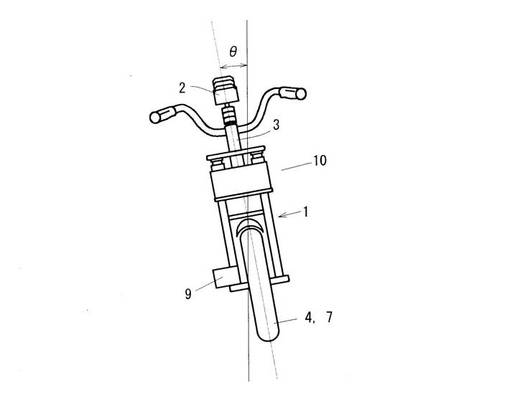
以下、本発明の実施の形態を図面を参照して説明する。図1は本発明に係る姿勢制御付き無人二輪車(以下、二輪車)の側面図、図2は背面図、図3は前輪と後輪の関係を示す説明図であるが、この二輪車は、車体1に操舵電動機2で操舵軸3を介して操舵される操舵車輪4、駆動電動機5でチェン、タイミングベルト等の減速、伝動装置6 介して駆動される駆動車輪7を取り付けたものである。この他、各電動機2、5を励磁するための励磁装置8、車体の傾斜角を算出するための傾斜角速度センサ9、旋回角を算出するための旋回角速度センサ10を取り付けている。なお、本例では、操舵車輪4を前輪、駆動車輪7を後輪としているが、逆であってもよく、この場合は後進走行と同じ意味となる。
【0014】
この場合の傾斜角とは、車体1が垂直面内で傾く角度であり、旋回角とは、水平面内で旋回する角度である。なお、本例では、傾斜角を検出するのに傾斜角速度センサ9を、旋回角を検出するのに旋回角速度センサ10を使用しているが、直接角度を検出するものよりも安価でレスポンスのよいものが入手できるからである。したがって、傾斜角速度センサ9から傾斜角を得る場合や旋回角速度センサ10から旋回角を得る場合には、それぞれの検出値を時間で積分することになる。
【0015】
さらに、車体1には、以上の各センサ9、10の検出値を演算して出力する制御・演算器11、無線機(図示省略)から送信される指令を受信して制御・演算器11に引き渡す受信器12、地上に引かれたライン(図示省略)を読み取って制御・演算器11に引き渡すライントレースセンサ13及び各機器の電源であるバッテリー14も搭載している。
【0016】
次に、二輪車が直進と旋回を組み合わせて転倒や蛇行することなく、設定した走行ラインに沿って走行する条件について説明する。なお、本物の二輪車では乗り手が体重移動することによって転倒を回避できることがあるが、本発明では、転倒回避を操舵操作のみによるものとした。本発明に係る総合的な姿勢制御は、姿勢制御と操舵制御で行い、姿勢制御は、比例制御と微分制御で行う点を特徴としている。比例制御は、車体の傾斜角から算出した要素であり、微分制御は傾斜角速度から算出した要素で、この両者で車体が転倒しないで走行できる操舵角を求める制御である。なお、この両制御では、車体は転倒しないだけであって蛇行は避けられないので、車体の旋回角を算出して所望の走行ラインに蛇行することなしに走行させる操舵制御も併せて行う。
【0017】
まず、姿勢制御について説明すると、今、車体が図2で示す傾斜角θ傾けば、転倒力(向心力)F[N]が作用する。この向心力Fは、
F=mg・tanθ‥‥(1)
ということになる[m:二輪車の重心位置の質量、g:重力の加速度]。
【0018】
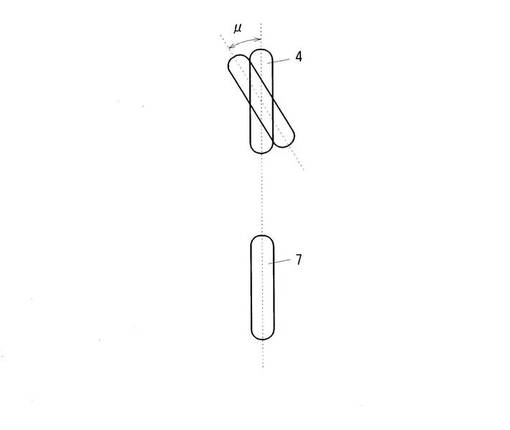
このとき、二輪車の操舵軸を図3のように車体が傾いた方に操舵角μ[Radian]で転舵すると、操舵車輪の転舵前後の法線の交点を中心とする半径r[m]の旋回が始まり、転倒を防ぐ。このときの旋回半径rは、
r=K1 /μ‥‥(2)
で求まる[K1 :ホイルベースが影響する比例定数]。すなわち、旋回半径rは操舵角μに反比例する。
【0019】
一方、車体の走行速度をV[m/sec]とすると、車体には反傾斜側に遠心力F[N]が作用し、この遠心力Fは、
F=m・V2 /r‥‥(3)
となる。式(3)に式(2)を代入して整理すると、以下の式(4)のように操舵角μを含んだものになる。
F=m・V2 /r=m・V2 ・μ/K1 ‥‥(4)
【0020】
式(1)の向心力Fと式(4)の遠心力Fとが等しいときには両者は釣り合って(転倒することなく)安定した走行となるから、以下の式(5)が成り立つ。
mg・tanθ=m・V2 ・μ/K1 ‥‥(5)
【0021】
K1 とgを比例定数K2 にまとめると、式(5)のμは、以下の(6)式となる。このμは、上記した比例制御の操舵角であるので、以下、μP と称する。
μP =K2 tanθ/V2 ‥‥(6)
【0022】
一方、微分制御の操舵角μD は、車体の傾斜角速度[Radian/sec]を要素とするものであるから、以下の式(7)となる[K3 :比例定数]。
μD =K3 /V2 ・ dθ/dt‥‥(7)
【0023】
比例制御と微分制御を統合したものを姿勢制御と称し、この場合の操舵角μ1 を両者の極性付加算値とする。したがって、姿勢制御の操舵角μ1 は、以下の式(8)になる。
μ1 =μP +μD =K2 tanθ/V2 +K3 /V2 ・ dθ/dt‥‥(8)
【0024】
次に、操舵制御について説明すると、意図的に旋回を行うには、目的の旋回方向とは逆向きの操舵角を与えることで実行できる。今、速度Vで半径rの旋回を行う場合の旋回角速度ω[Radian/sec]は以下の(9)式になる。
ω=V/r‥‥(9)
【0025】
(9)式に操舵角μと旋回半径rの関係を表す式(2)を代入すると、以下の(10)式になる[K4 :比例定数]。
ω=V/r=V・μ/K1 =K4 V・μ‥‥(10)
【0026】
したがって、旋回角速度ωに必要な操舵制御の操舵角μ2 は、以下の(11)式になる[K5 :比例定数]。
μ2 =K5 ω/V‥‥(11)
【0027】
式(8)の操舵角μ1 による姿勢制御が正常に機能している状態において、式(11)で表される操舵制御の操舵角μ2 を目的の旋回方向に対して逆向きに与えると、以下の式(12)の遠心力が作用し[K6 :比例定数]、車体が傾斜する。
F=m・V2 /r=m・ω・V=K6 m・V2 ・μ2 ‥‥(12)
【0028】
傾斜が傾斜角速度センサで検出されると、式(8)の傾斜角θの値が大きくなり、姿勢制御の操舵角μ1 は車体が転倒しない方向、すなわち、目的の旋回方向側に転舵されることで旋回が行われる。
【0029】
姿勢制御の操舵角舵μ1 と操舵制御の操舵角μ2 を極性付加算することで、総合姿勢制御の操舵角μが得られ、以下の(13)式となる。
μ=μ1 −μ2 =μP +μD −μ2 =K2 tanθ/V2 +K3 /V2 ・ dθ/dt −K5 ω/V‥‥(13)
この場合、操舵制御の操舵角μ2 は姿勢制御の操舵角μ1 の外乱として作用する。
【0030】
このときの旋回角αは旋回角速度ωを時間で積分した値で表され、以下の(14)式となる[K:統合した比例定数]。
α=∫ω・dt=∫KV・μ2 dt=KV∫μ2 dt‥‥(14)
【0031】
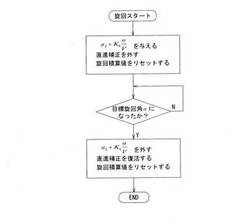
直進時と旋回時の姿勢制御(動作)を図4のフローチャートと図5のブロック図で説明する。
(1)直進時の動作
直進時は姿勢制御の操舵角μ1 を旋回角速度ωを積分した旋回角αを用いて直進補正を行う。姿勢制御は二輪車が転倒しないようにする操舵であるから、走行方向は制御できず、蛇行は避けられない。二輪車を直進させる場合は、直進開始時の旋回角速度ωの積分値を零リセットし、その後、この積分値、すなわち、旋回角αの値が零を維持できるように操舵制御の操舵角μ2 を制御する。
【0032】
(2)旋回時の動作
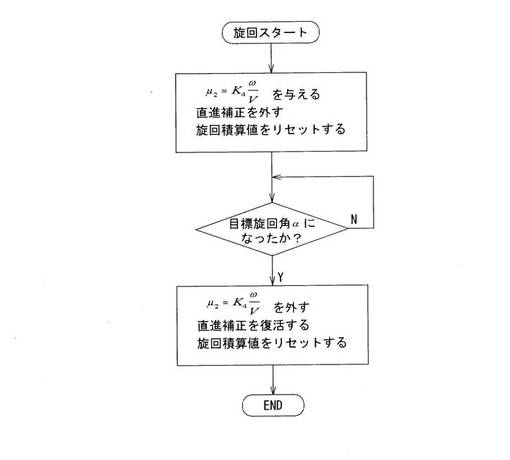
制御・演算器に旋回指令が入力されると、一時的に直進補正を外し、代わりに式(11)で表される操舵制御の操舵角μ2 を操舵電動機に出力する。すると、上記した姿勢制御の操舵角μ1 と操舵制御の操舵角μ2 に従う旋回が始まり、目標の旋回角になると、操舵制御の操舵角μ2 を直進補正の値に戻す。なお、制御・演算器への旋回指令は、予め組み込んだプログラム、無線機からの送信、ライントレースセンサの角度算出部から発せられる。
【0033】
(3)ブロック図(図5)の説明
二輪車の姿勢制御は、図5に示すように、センサー部(図左)、マイコンを使った制御・演算器(図中央)並びにアクチュエータ(図右)に分かれる。制御・演算器はマイコンによるプログラムで実行する。次に、各ブロックについて説明する。
A.無線機
2.4GHz帯の無線機(Bluetooth−商品名)を使い、外部からラジコン操作をする。
B.ライントレースセンサ
反射型センサで、床面に引かれたラインを検知してそのデータを採取する。
C.旋回角速度センサ
圧電式の旋回角速度センサを使用する。
D.傾斜角速度センサ
圧電式の傾斜角速度センサを使用する。
E.通信部
無線機からの信号をデコード化し、各演算部に分配する。
F.トレース角度算出部
ライントレースセンサで得られた旋回方向データによってトレース角度を算出する。
G.旋回角演算部
旋回角速度センサで得られた旋回角速度ωを積分して旋回角αを算出する。
H.傾斜角算出部
傾斜角速度センサで得られた傾斜角速度dθ/dtを積分して傾斜角θを算出する。
I.比例成分算出部
傾斜角算出部で得られた傾斜角θを用いて比例制御の操舵角μP =K2 tanθ/V2 を算出する。
J.微分成分算出部
傾斜角速度センサで得られた傾斜角速度dθ/dtを用いて微分制御の操舵角μD =K3 /V2 ・ dθ/dtを算出する。
K.操舵方法受付部
無線機から指定旋回角又は指定操舵角の操舵方法の指令を受け取り、操舵方法切替部(R)のスイッチを切り替える。
L.指定旋回角受付部
無線機から指定旋回角αの信号を受け取る。
M.指定操舵角受付部
無線機から指定操舵角(操舵制御の操舵角)μ2 の信号を受け取る。
N.指定速度受付部
無線機からの車体の走行速度の信号を受け取り、各演算部に分配する。
O.操舵成分算出部
無線機から送られて来る操舵角又は旋回角指令及び旋回算出部で算出された旋回角より操舵制御の操舵角μ2 を算出する。
P.操舵制御部
姿勢制御の操舵角舵μ1 と操舵制御の操舵角μ2 により、実操舵角μ1 −μ2 を算出する。
Q.姿勢成分算出部
傾斜角速度センサの出力ωを基に算出された比例制御の操舵角μP と微分制御の操舵角μD を用いて姿勢制御の操舵角μ1 =μP +μD を算出する。
R.操舵方法切替部
操舵指令入力をトレース角度算出部又は通信部のいずれかに手動選択し、通信部を選択した場合は、通信文に含まれる操舵方法の指定文字により、指定旋回角又は指定操舵角のいずれかを選択する。
S.駆動電動機(走行モータ)制御装置
車体を走行させる駆動車輪を駆動する。この場合、任意の回転速度と回転方向が指定できる。なお、図1では出力軸にギアを取り付けたステッピングモータを示しているが、価格の安いブラシ付きのDCモータとエンコーダの組合せによってもよい。
T.操舵電動機(舵モータ)制御装置
操舵電動機を駆動する。この場合、任意の操舵角と操舵速度を指定できる。また、現在の操舵角がモニターできる。図1では出力軸にギアを取り付けたステッピングモータを示しているが、価格の安いブラシ付きのDCモータとエンコーダ又はボテンシオメータの組合せによってもよい。
【0034】
以上のような無人二輪車の用途として出願人が意図しているのは教材としての利用である。この無人二輪車を走行させるには、マイコンに予め組み込んだプログラムによる場合と、ライントレースセンサからの信号による場合と、無線機から送信されて来る操舵データによる場合である。これを上手に使いこなすには、マルチタスク・リアルタイム制御が不可欠である。したがって、工業系の高校生、高専生、技術系の大学生の教材として適している。この点で、ロボットコンテストのようにその技術を競う競技会を開催しても面白い。競技の内容としては、地上に引いたライン上を早く正確に走行する規定競技、旋回、後退、停止といった動作を自由にパーフォーマンスさせる自由競技といったことが考えられる。
【符号の説明】
【0035】
1 車体
2 操舵電動機
3 操舵軸
4 操舵車輪
5 駆動電動機
6 減速、伝動装置
7 駆動車輪
8 励磁装置
9 傾斜角速度センサ
10 回頭角速度センサ
11 制御・演算器
12 受信器
13 ライントレースセンサ
14 バッテリー
μ 総合姿勢制御の操舵角
μ1 姿勢制御の操舵角
μp 比例制御の操舵角
μD 微分制御の操舵角
μ2 操舵制御の操舵角
【技術分野】
【0001】
本発明は、予め定められたプログラム、無線機による指示或いは地上に引かれたラインに沿って無人二輪車を所定の方向に蛇行することなく走行させる姿勢制御付き無人二輪車に関するものである。
【背景技術】
【0002】
二輪車は四輪車と違って適切なハンドル操作(操舵)を行わなければ転倒する。人が乗る場合は、無意識の感で体重移動とハンドル操作によって転倒することなく、走行させることができる。しかし、無人で走行させる場合には、何らかの姿勢制御を行わなければ転倒する。この種の無人二輪車は、興趣のある高度な玩具として或いはリアルタイムのメカニカル制御の教材として望まれている。この点で、概念的ではあるが、無人二輪車の姿勢制御について幾つかの先行技術が提案されている。
【0003】
特許文献1には、操舵車輪の操舵角を指令できる制御部を備えるとともに、車体が傾斜するときの角速度を検出する角速度センサを設け、走行中の車体の傾斜角速度の偏差を減少させるように操舵車輪を制御するものが示されている。しかし、この文献のものは、角速度センサの出力だけを用いて処理しており、姿勢制御にもっとも的確な傾斜角を算出していないため、姿勢制御が不十分という問題がある。また、転倒防止の重要な要件である車体の走行速度の要素が含まれておらず、転倒を防ぐには不十分である。
【0004】
また、特許文献2には、車体の傾斜角(ロール角と述べている)を検出するとともに、任意の角度で操舵できる手段を備え、リモコンから送信されて来る転倒を防ぐための指示ロール角と現在のロール角との偏差を零にするように操舵を行うものが示されている。しかし、操舵角の算出は現在値よりも大きいか小さいかだけであって角度指定ではないため、操舵が不確かである。さらに、この文献のものも、操舵角の算出に走行速度の要素が含まれていない。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】実開平08−001268号公報
【特許文献2】WO2004−054678号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明は、車体の速度を加味することはもちろんのこと、姿勢制御のための操舵角を転倒を防ぐ姿勢制御と走行方向を一定に保つ操舵制御の両方によって求めることで、より正確で安定した操舵ができるようにしたものである。加えて、所望の方向に走行させる場合、その制御のバリエーションを多くしてより興趣を増せるようにしたものである。
【課題を解決するための手段】
【0007】
以上の課題の下、本発明は、請求項1に記載した、操舵電動機で操舵される操舵車輪と、駆動電動機で駆動される駆動車輪を装備した姿勢制御付き無人二輪車であり、車体に、車体の傾斜角速度を検出する傾斜角速度センサと旋回角速度を検出する旋回角速度センサを取り付けるとともに、傾斜角速度センサの出力によって車体の傾斜角と傾斜角速度及び走行速度の関数である姿勢制御の操舵角μ1 と、旋回角速度センサの出力によって旋回時における車体の旋回角速度と走行速度の関数である操舵制御の操舵角μ2 とをそれぞれ算出し、操舵車輪を各操舵角μ1 、μ2 の極性付加算である総合姿勢制御の操舵角μで操舵しながら走行させることを特徴とする姿勢制御付き無人二輪車を提供したものである。
【0008】
また、本発明は、以上の無人二輪車において、請求項2に記載した、姿勢制御の操舵角μ1 を、車体の傾斜角と走行速度の関数である比例制御の操舵角μP と、傾斜角速度と走行速度の関数である微分制御の操舵角μD をそれぞれ算出し、これら操舵角μP 、μD の極性付加算とした手段、請求項3に記載した、走行を直進走行と旋回走行に分類し、直進走行時には、旋回角速度の積分値を零にリセットし、その後、この積分値、すなわち、旋回角が零になるようにして直進性を保持する操舵制御の操舵角μ2 で操舵する直進補正を行う手段を提供する。
【0009】
さらに、本発明は、請求項4に記載した、旋回走行時には、直進補正を外し、操舵制御の操舵角μ2 で操舵することで所定の旋回半径で旋回させ、直進走行に戻ると、再度直進補正を始める手段、請求項5に記載した、姿勢制御付き無人二輪車の走行を、予め組み込んだプログラムからの指示、無線機による指示、地上に引かれたラインを読み取るライントレースセンサからの指示のいずれかで行う手段を提供する。
【発明の効果】
【0010】
請求項1の手段によると、姿勢制御のための総合操舵角として、傾斜角速度センサによって車体の傾斜角と傾斜角速度及び走行速度の関数である姿勢制御の操舵角と、旋回角速度センサによって旋回時における車体の旋回角速度と走行速度の関数である操舵制御の操舵角とを極性付加算したものであるから、直進にしても旋回にしても、所望の方向に蛇行のない安定した姿勢で走行ができる。これにおいて、車体の傾斜角と旋回角に基づく操舵車輪の操舵角を共に角速度センサの出力から算出して求めたものであるから、直接角度を検出する機器よりも出力のレスポンスが鋭いし、非常に安価である。
【0011】
請求項2の手段によると、姿勢制御は傾斜角を要素にする比例制御と傾斜角速度を要素にする微分制御とによったものであるから、より精度の高い姿勢制御ができる。請求項3の手段によると、直進時における直線性が高まり、請求項4の手段によると、旋回時における旋回半径の保持が可能になる。請求項5の手段によると、姿勢制御を行うための操作指令のバリエーションを増やしてより高度で、かつ、興趣の高い姿勢制御付き無人二輪車を提供できる。
【図面の簡単な説明】
【0012】
【図1】本発明に係る姿勢制御付き無人二輪車の側面図である。
【図2】本発明に係る姿勢制御付き無人二輪車の背面図である。
【図3】前輪と後輪の関係を示す説明図
【図4】直進走行と回頭走行についてのフローチャートである。
【図5】本発明に係る姿勢制御のブロック図である。
【発明を実施するための形態】
【0013】
以下、本発明の実施の形態を図面を参照して説明する。図1は本発明に係る姿勢制御付き無人二輪車(以下、二輪車)の側面図、図2は背面図、図3は前輪と後輪の関係を示す説明図であるが、この二輪車は、車体1に操舵電動機2で操舵軸3を介して操舵される操舵車輪4、駆動電動機5でチェン、タイミングベルト等の減速、伝動装置6 介して駆動される駆動車輪7を取り付けたものである。この他、各電動機2、5を励磁するための励磁装置8、車体の傾斜角を算出するための傾斜角速度センサ9、旋回角を算出するための旋回角速度センサ10を取り付けている。なお、本例では、操舵車輪4を前輪、駆動車輪7を後輪としているが、逆であってもよく、この場合は後進走行と同じ意味となる。
【0014】
この場合の傾斜角とは、車体1が垂直面内で傾く角度であり、旋回角とは、水平面内で旋回する角度である。なお、本例では、傾斜角を検出するのに傾斜角速度センサ9を、旋回角を検出するのに旋回角速度センサ10を使用しているが、直接角度を検出するものよりも安価でレスポンスのよいものが入手できるからである。したがって、傾斜角速度センサ9から傾斜角を得る場合や旋回角速度センサ10から旋回角を得る場合には、それぞれの検出値を時間で積分することになる。
【0015】
さらに、車体1には、以上の各センサ9、10の検出値を演算して出力する制御・演算器11、無線機(図示省略)から送信される指令を受信して制御・演算器11に引き渡す受信器12、地上に引かれたライン(図示省略)を読み取って制御・演算器11に引き渡すライントレースセンサ13及び各機器の電源であるバッテリー14も搭載している。
【0016】
次に、二輪車が直進と旋回を組み合わせて転倒や蛇行することなく、設定した走行ラインに沿って走行する条件について説明する。なお、本物の二輪車では乗り手が体重移動することによって転倒を回避できることがあるが、本発明では、転倒回避を操舵操作のみによるものとした。本発明に係る総合的な姿勢制御は、姿勢制御と操舵制御で行い、姿勢制御は、比例制御と微分制御で行う点を特徴としている。比例制御は、車体の傾斜角から算出した要素であり、微分制御は傾斜角速度から算出した要素で、この両者で車体が転倒しないで走行できる操舵角を求める制御である。なお、この両制御では、車体は転倒しないだけであって蛇行は避けられないので、車体の旋回角を算出して所望の走行ラインに蛇行することなしに走行させる操舵制御も併せて行う。
【0017】
まず、姿勢制御について説明すると、今、車体が図2で示す傾斜角θ傾けば、転倒力(向心力)F[N]が作用する。この向心力Fは、
F=mg・tanθ‥‥(1)
ということになる[m:二輪車の重心位置の質量、g:重力の加速度]。
【0018】
このとき、二輪車の操舵軸を図3のように車体が傾いた方に操舵角μ[Radian]で転舵すると、操舵車輪の転舵前後の法線の交点を中心とする半径r[m]の旋回が始まり、転倒を防ぐ。このときの旋回半径rは、
r=K1 /μ‥‥(2)
で求まる[K1 :ホイルベースが影響する比例定数]。すなわち、旋回半径rは操舵角μに反比例する。
【0019】
一方、車体の走行速度をV[m/sec]とすると、車体には反傾斜側に遠心力F[N]が作用し、この遠心力Fは、
F=m・V2 /r‥‥(3)
となる。式(3)に式(2)を代入して整理すると、以下の式(4)のように操舵角μを含んだものになる。
F=m・V2 /r=m・V2 ・μ/K1 ‥‥(4)
【0020】
式(1)の向心力Fと式(4)の遠心力Fとが等しいときには両者は釣り合って(転倒することなく)安定した走行となるから、以下の式(5)が成り立つ。
mg・tanθ=m・V2 ・μ/K1 ‥‥(5)
【0021】
K1 とgを比例定数K2 にまとめると、式(5)のμは、以下の(6)式となる。このμは、上記した比例制御の操舵角であるので、以下、μP と称する。
μP =K2 tanθ/V2 ‥‥(6)
【0022】
一方、微分制御の操舵角μD は、車体の傾斜角速度[Radian/sec]を要素とするものであるから、以下の式(7)となる[K3 :比例定数]。
μD =K3 /V2 ・ dθ/dt‥‥(7)
【0023】
比例制御と微分制御を統合したものを姿勢制御と称し、この場合の操舵角μ1 を両者の極性付加算値とする。したがって、姿勢制御の操舵角μ1 は、以下の式(8)になる。
μ1 =μP +μD =K2 tanθ/V2 +K3 /V2 ・ dθ/dt‥‥(8)
【0024】
次に、操舵制御について説明すると、意図的に旋回を行うには、目的の旋回方向とは逆向きの操舵角を与えることで実行できる。今、速度Vで半径rの旋回を行う場合の旋回角速度ω[Radian/sec]は以下の(9)式になる。
ω=V/r‥‥(9)
【0025】
(9)式に操舵角μと旋回半径rの関係を表す式(2)を代入すると、以下の(10)式になる[K4 :比例定数]。
ω=V/r=V・μ/K1 =K4 V・μ‥‥(10)
【0026】
したがって、旋回角速度ωに必要な操舵制御の操舵角μ2 は、以下の(11)式になる[K5 :比例定数]。
μ2 =K5 ω/V‥‥(11)
【0027】
式(8)の操舵角μ1 による姿勢制御が正常に機能している状態において、式(11)で表される操舵制御の操舵角μ2 を目的の旋回方向に対して逆向きに与えると、以下の式(12)の遠心力が作用し[K6 :比例定数]、車体が傾斜する。
F=m・V2 /r=m・ω・V=K6 m・V2 ・μ2 ‥‥(12)
【0028】
傾斜が傾斜角速度センサで検出されると、式(8)の傾斜角θの値が大きくなり、姿勢制御の操舵角μ1 は車体が転倒しない方向、すなわち、目的の旋回方向側に転舵されることで旋回が行われる。
【0029】
姿勢制御の操舵角舵μ1 と操舵制御の操舵角μ2 を極性付加算することで、総合姿勢制御の操舵角μが得られ、以下の(13)式となる。
μ=μ1 −μ2 =μP +μD −μ2 =K2 tanθ/V2 +K3 /V2 ・ dθ/dt −K5 ω/V‥‥(13)
この場合、操舵制御の操舵角μ2 は姿勢制御の操舵角μ1 の外乱として作用する。
【0030】
このときの旋回角αは旋回角速度ωを時間で積分した値で表され、以下の(14)式となる[K:統合した比例定数]。
α=∫ω・dt=∫KV・μ2 dt=KV∫μ2 dt‥‥(14)
【0031】
直進時と旋回時の姿勢制御(動作)を図4のフローチャートと図5のブロック図で説明する。
(1)直進時の動作
直進時は姿勢制御の操舵角μ1 を旋回角速度ωを積分した旋回角αを用いて直進補正を行う。姿勢制御は二輪車が転倒しないようにする操舵であるから、走行方向は制御できず、蛇行は避けられない。二輪車を直進させる場合は、直進開始時の旋回角速度ωの積分値を零リセットし、その後、この積分値、すなわち、旋回角αの値が零を維持できるように操舵制御の操舵角μ2 を制御する。
【0032】
(2)旋回時の動作
制御・演算器に旋回指令が入力されると、一時的に直進補正を外し、代わりに式(11)で表される操舵制御の操舵角μ2 を操舵電動機に出力する。すると、上記した姿勢制御の操舵角μ1 と操舵制御の操舵角μ2 に従う旋回が始まり、目標の旋回角になると、操舵制御の操舵角μ2 を直進補正の値に戻す。なお、制御・演算器への旋回指令は、予め組み込んだプログラム、無線機からの送信、ライントレースセンサの角度算出部から発せられる。
【0033】
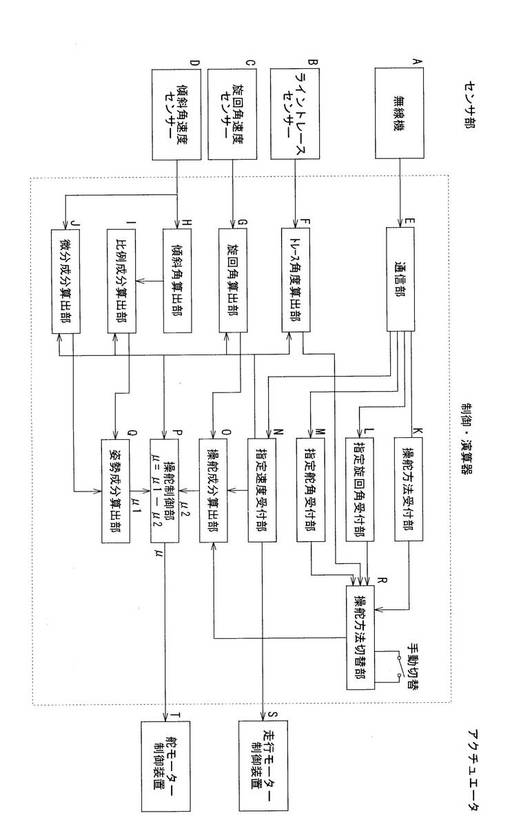
(3)ブロック図(図5)の説明
二輪車の姿勢制御は、図5に示すように、センサー部(図左)、マイコンを使った制御・演算器(図中央)並びにアクチュエータ(図右)に分かれる。制御・演算器はマイコンによるプログラムで実行する。次に、各ブロックについて説明する。
A.無線機
2.4GHz帯の無線機(Bluetooth−商品名)を使い、外部からラジコン操作をする。
B.ライントレースセンサ
反射型センサで、床面に引かれたラインを検知してそのデータを採取する。
C.旋回角速度センサ
圧電式の旋回角速度センサを使用する。
D.傾斜角速度センサ
圧電式の傾斜角速度センサを使用する。
E.通信部
無線機からの信号をデコード化し、各演算部に分配する。
F.トレース角度算出部
ライントレースセンサで得られた旋回方向データによってトレース角度を算出する。
G.旋回角演算部
旋回角速度センサで得られた旋回角速度ωを積分して旋回角αを算出する。
H.傾斜角算出部
傾斜角速度センサで得られた傾斜角速度dθ/dtを積分して傾斜角θを算出する。
I.比例成分算出部
傾斜角算出部で得られた傾斜角θを用いて比例制御の操舵角μP =K2 tanθ/V2 を算出する。
J.微分成分算出部
傾斜角速度センサで得られた傾斜角速度dθ/dtを用いて微分制御の操舵角μD =K3 /V2 ・ dθ/dtを算出する。
K.操舵方法受付部
無線機から指定旋回角又は指定操舵角の操舵方法の指令を受け取り、操舵方法切替部(R)のスイッチを切り替える。
L.指定旋回角受付部
無線機から指定旋回角αの信号を受け取る。
M.指定操舵角受付部
無線機から指定操舵角(操舵制御の操舵角)μ2 の信号を受け取る。
N.指定速度受付部
無線機からの車体の走行速度の信号を受け取り、各演算部に分配する。
O.操舵成分算出部
無線機から送られて来る操舵角又は旋回角指令及び旋回算出部で算出された旋回角より操舵制御の操舵角μ2 を算出する。
P.操舵制御部
姿勢制御の操舵角舵μ1 と操舵制御の操舵角μ2 により、実操舵角μ1 −μ2 を算出する。
Q.姿勢成分算出部
傾斜角速度センサの出力ωを基に算出された比例制御の操舵角μP と微分制御の操舵角μD を用いて姿勢制御の操舵角μ1 =μP +μD を算出する。
R.操舵方法切替部
操舵指令入力をトレース角度算出部又は通信部のいずれかに手動選択し、通信部を選択した場合は、通信文に含まれる操舵方法の指定文字により、指定旋回角又は指定操舵角のいずれかを選択する。
S.駆動電動機(走行モータ)制御装置
車体を走行させる駆動車輪を駆動する。この場合、任意の回転速度と回転方向が指定できる。なお、図1では出力軸にギアを取り付けたステッピングモータを示しているが、価格の安いブラシ付きのDCモータとエンコーダの組合せによってもよい。
T.操舵電動機(舵モータ)制御装置
操舵電動機を駆動する。この場合、任意の操舵角と操舵速度を指定できる。また、現在の操舵角がモニターできる。図1では出力軸にギアを取り付けたステッピングモータを示しているが、価格の安いブラシ付きのDCモータとエンコーダ又はボテンシオメータの組合せによってもよい。
【0034】
以上のような無人二輪車の用途として出願人が意図しているのは教材としての利用である。この無人二輪車を走行させるには、マイコンに予め組み込んだプログラムによる場合と、ライントレースセンサからの信号による場合と、無線機から送信されて来る操舵データによる場合である。これを上手に使いこなすには、マルチタスク・リアルタイム制御が不可欠である。したがって、工業系の高校生、高専生、技術系の大学生の教材として適している。この点で、ロボットコンテストのようにその技術を競う競技会を開催しても面白い。競技の内容としては、地上に引いたライン上を早く正確に走行する規定競技、旋回、後退、停止といった動作を自由にパーフォーマンスさせる自由競技といったことが考えられる。
【符号の説明】
【0035】
1 車体
2 操舵電動機
3 操舵軸
4 操舵車輪
5 駆動電動機
6 減速、伝動装置
7 駆動車輪
8 励磁装置
9 傾斜角速度センサ
10 回頭角速度センサ
11 制御・演算器
12 受信器
13 ライントレースセンサ
14 バッテリー
μ 総合姿勢制御の操舵角
μ1 姿勢制御の操舵角
μp 比例制御の操舵角
μD 微分制御の操舵角
μ2 操舵制御の操舵角
【特許請求の範囲】
【請求項1】
操舵電動機で操舵される操舵車輪と、駆動電動機で駆動される駆動車輪を装備した姿勢制御付き無人二輪車であり、車体に、車体の傾斜角速度を検出する傾斜角速度センサと旋回角速度を検出する旋回角速度センサを取り付けるとともに、傾斜角速度センサの出力によって車体の傾斜角と傾斜角速度及び走行速度の関数である姿勢制御の操舵角μ1 と、旋回角速度センサの出力によって旋回時における車体の旋回角速度と走行速度の関数である操舵制御の操舵角μ2 とをそれぞれ算出し、操舵車輪を各操舵角μ1 、μ2 の極性付加算である総合姿勢制御の操舵角μで操舵しながら走行させることを特徴とする姿勢制御付き無人二輪車。
【請求項2】
姿勢制御の操舵角μ1 を、車体の傾斜角と走行速度の関数である比例制御の操舵角μP と、傾斜角速度と走行速度の関数である微分制御の操舵角μD をそれぞれ算出し、これら操舵角μP 、μD の極性付加算とした請求項1の姿勢制御付き無人二輪車。
【請求項3】
走行を直進走行と旋回走行に分類し、直進走行時には、旋回角速度の積分値を零にリセットし、その後、この積分値、すなわち、旋回角が零になるようにして直進性を保持する操舵制御の操舵角μ2 で操舵する直進補正を行う請求項1又は2の姿勢制御付き無人自転車。
【請求項4】
旋回走行時には、直進補正を外し、操舵制御の操舵角μ2 で操舵することで所定の旋回半径で旋回させ、直進走行に戻ると、再度直進補正を始める請求項3の姿勢制御付き無人自転車。
【請求項5】
姿勢制御付き無人二輪車の走行を、予め組み込んだプログラムからの指示、無線機による指示、地上に引かれたラインを読み取るライントレースセンサからの指示のいずれかで行う請求項1〜4いずれかの姿勢制御付き無人二輪車。
【請求項1】
操舵電動機で操舵される操舵車輪と、駆動電動機で駆動される駆動車輪を装備した姿勢制御付き無人二輪車であり、車体に、車体の傾斜角速度を検出する傾斜角速度センサと旋回角速度を検出する旋回角速度センサを取り付けるとともに、傾斜角速度センサの出力によって車体の傾斜角と傾斜角速度及び走行速度の関数である姿勢制御の操舵角μ1 と、旋回角速度センサの出力によって旋回時における車体の旋回角速度と走行速度の関数である操舵制御の操舵角μ2 とをそれぞれ算出し、操舵車輪を各操舵角μ1 、μ2 の極性付加算である総合姿勢制御の操舵角μで操舵しながら走行させることを特徴とする姿勢制御付き無人二輪車。
【請求項2】
姿勢制御の操舵角μ1 を、車体の傾斜角と走行速度の関数である比例制御の操舵角μP と、傾斜角速度と走行速度の関数である微分制御の操舵角μD をそれぞれ算出し、これら操舵角μP 、μD の極性付加算とした請求項1の姿勢制御付き無人二輪車。
【請求項3】
走行を直進走行と旋回走行に分類し、直進走行時には、旋回角速度の積分値を零にリセットし、その後、この積分値、すなわち、旋回角が零になるようにして直進性を保持する操舵制御の操舵角μ2 で操舵する直進補正を行う請求項1又は2の姿勢制御付き無人自転車。
【請求項4】
旋回走行時には、直進補正を外し、操舵制御の操舵角μ2 で操舵することで所定の旋回半径で旋回させ、直進走行に戻ると、再度直進補正を始める請求項3の姿勢制御付き無人自転車。
【請求項5】
姿勢制御付き無人二輪車の走行を、予め組み込んだプログラムからの指示、無線機による指示、地上に引かれたラインを読み取るライントレースセンサからの指示のいずれかで行う請求項1〜4いずれかの姿勢制御付き無人二輪車。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−4842(P2011−4842A)
【公開日】平成23年1月13日(2011.1.13)
【国際特許分類】
【出願番号】特願2009−149524(P2009−149524)
【出願日】平成21年6月24日(2009.6.24)
【出願人】(594165125)タマデン工業株式会社 (2)
【Fターム(参考)】
【公開日】平成23年1月13日(2011.1.13)
【国際特許分類】
【出願日】平成21年6月24日(2009.6.24)
【出願人】(594165125)タマデン工業株式会社 (2)
【Fターム(参考)】
[ Back to top ]