
姿勢安定化制御装置及び該姿勢安定化制御装置を備えた車両
【課題】姿勢制御機能を有する車両の、悪路での乗り心地を改善する。
【解決手段】姿勢制御用のコントローラ103は、センサ群102から供給される路面状況に基づいて、車両の運動及び姿勢を制御するアクチュエータ131〜139の制御量を制御し、路面が悪路になると、姿勢制御のゲインを下げ、トルクを増加させることにより、サスペンションによらず、乗り心地を改善する。悪路の判定は、単位時間あたりの加速度の変動回数の検出、車輪の乗り上げの検出などにより行う。
【解決手段】姿勢制御用のコントローラ103は、センサ群102から供給される路面状況に基づいて、車両の運動及び姿勢を制御するアクチュエータ131〜139の制御量を制御し、路面が悪路になると、姿勢制御のゲインを下げ、トルクを増加させることにより、サスペンションによらず、乗り心地を改善する。悪路の判定は、単位時間あたりの加速度の変動回数の検出、車輪の乗り上げの検出などにより行う。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、車両の姿勢安定化制御装置と該姿勢安定化制御装置を備えた車両に関する。
【背景技術】
【0002】
走行車両の安定性を高めるため、様々な提案がなされている。
例えば、特許文献1には、ボディの前部に取り付けられた転舵車輪とボディの後部に取り付けられた駆動車輪とを備えた1人用の乗り物において、車両の安定性を保つため、ボディを水平に維持する技術が開示されている。
また、特許文献2には、車両の安定性を向上するため、ホイールベースを可変する技術が開示されている。
さらに、特許文献3には、車両の旋回性を高めるために、旋回時に乗り物の重心を旋回内輪に移動させ、旋回安定性と乗り心地を向上させる技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−82044号公報
【特許文献2】特開2005−112300号公報
【特許文献3】特開2007−099218号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
通常の車両では、悪路、段差乗り上げなど、乗り心地が良くない状態は、サスペンションにより改善されている。
しかしながら、特許文献1〜3に開示されている車両は、十分なパワーのサスペンションを配置することが困難であり、悪路走行時等での、乗り心地の改善が望まれている。
【0005】
この発明は、こうした実情に鑑みてなされたものであり、車両の乗り心地を改善することを目的とする。
また、この発明は、車両の悪路走行時等の乗り心地を、サスペンションによらず、改善することを他の目的とする。
【課題を解決するための手段】
【0006】
こうした目的を達成するため、本発明の第1の観点に係る姿勢安定化制御装置は、
ボディと、前輪と、後輪とを備える車両の姿勢を制御する姿勢制御装置であって、
車両の運動の目標値を設定する目標値設定手段と、
設定された目標値に基づいて、車両の運動及び姿勢を制御するアクチュエータの制御量を制御するための制御信号を生成する制御量演算手段と、
車両の運転状態を検出する運転状態検出手段と、
前記運転状態検出手段により検出された車両の運転状態と前記目標値設定手段により設定された目標値とに基づいて、車両を安定化させるための補正量を演算する補正量演算手段と、
車両の路面状況を検出する路面状況検出手段と、
前記路面状況検出手段で検出された路面状況に基づいて、前記補正量を修正する補正量修正手段と、
前記制御量演算手段で生成された制御量を、前記補正量修正手段で修正された補正量を用いて補正する補正手段と、
前記補正手段により補正された制御量を用いて、アクチュエータを制御する制御手段と、
を備えることを特徴とする。
【0007】
例えば、前記補正量修正手段は、前記路面状況検出手段が路面が所定の悪路であることを検出したとき、又は、車両が段差に乗り上げたことを検出したときに、前記制御手段による姿勢制御のゲインを小さくするように、前記補正量を修正する。
【0008】
例えば、前記補正量修正手段は、前記路面状況検出手段が路面が所定の悪路であることを検出したときに、前記アクチュエータの位置制御量を小さく、トルクを大きくするように、前記補正量を修正する。
【0009】
例えば、前記補正量修正手段は、前記路面状況検出手段が、車両が段差に乗り上げたことを検出したときに、一定時間、前記アクチュエータの位置制御量を小さく、トルクを大きくするように、前記補正量を修正し、その後、元の状態に復帰させる。
【0010】
例えば、前記制御手段は、アクチュエータにより前記ボディを鉛直方向に上下する手段を備え、前記補正量修正手段は、前記路面状況検出手段が路面が所定の悪路であることを検出したとき、又は、車両が段差に乗り上げたことを検出したときに、前記制御手段によるボディの上下方向への移動の移動量を小さくし、アクチュエータのトルクを大きくするように、前記補正量を修正する。
【0011】
例えば、前記前輪は、右前輪と左前輪を含み、前記アクチュエータは、右前輪を基準とするボディの高さ、左前輪を基準とするボディの高さ、前輪と後輪との間隔を制御するアクチュエータを含んでもよい。
【0012】
この発明の第2の観点に係る車両は、上記構成の姿勢安定化制御装置を備えることを特徴とする。
【0013】
また、この発明の第3の観点に係るコンピュータプログラムは、
コンピュータを、
車両の運動の目標値を設定する目標値設定手段と、
設定された目標値に基づいて、車両の運動及び姿勢を制御するアクチュエータの制御量を制御するための制御信号を生成する制御量演算手段と、
車両の運転状態を検出する運転状態検出手段と、
前記運転状態検出手段により検出された車両の運転状態と前記目標値設定手段により設定された目標値とに基づいて、車両を安定化させるための補正量を演算する補正量演算手段と、
車両の路面状況を検出する路面状況検出手段と、
前記路面状況検出手段で検出された路面状況に基づいて、前記補正量を修正する補正量修正手段と、
前記制御量演算手段で生成された制御量を、前記補正量修正手段で修正された補正量を用いて補正する補正手段と、
前記補正手段により補正された制御量を用いて、アクチュエータを制御する制御手段と、
として機能させることを特徴とする。
【発明の効果】
【0014】
本発明によれば、検出された路面状態によって補正量を制御するので、悪路や段差乗り上げなどの路面状況に応じた車両の適正な運転が可能となり、乗り心地を改善することができる。
【図面の簡単な説明】
【0015】
【図1】(a)〜(c)は、この発明の一実施形態に係る車両を説明するための図である。
【図2】(a)〜(c)は、車両のリーン制御を説明する図である。
【図3】車両の制御システムの構成図である。
【図4】コントローラの構成図である。
【図5】コントローラの機能構成図である。
【図6】目標安定余裕度演算部と実安定余裕度演算部の機能構成を示すブロック図である。
【図7】Gセンサから車両の重心に向かうベクトルと、姿勢制御量との関係を示す図である。
【図8】(a)、(b)は、Gセンサの傾きを説明するための図である。
【図9】(a)〜(e)は、マップの例を示す図である。
【図10】路面上の車両に加わる力のモデルである。
【図11】転倒安定余裕度を説明するための図である。
【図12】θsマップの例を示す図である。
【図13】(a)〜(c)は、θsマップの例を示す図である。
【図14】路面に設置された車両の安定度を求める手順を説明するための図である。
【図15】L11〜L32を求めるθsマップの例を示す図である。
【図16】θ31〜θ33を求めるマップの例を示す図である。
【図17】L31,L32を求めるマップの例を示す図である。
【図18】車両の転倒する方向を説明する図である。
【図19】補正量を説明するための図である。
【図20】補正量を格納したテーブルの例を示す図である。
【図21】制御面を説明する図である。
【図22】(a)、(b)は、加速度に応じて、基準値π/2を変化させるマップを示す図である。
【図23】係数klcのマップである。
【図24】(a)、(b)は、係数K10とK11を説明するためのマップの例を示す図である。
【図25】(a)、(b)は、係数K0とK1を説明するためのマップの例を示す図である。
【図26】tan(LENradref3)/2と−tan(LENradref3)/2とを修正・補正する手法を示す図である。
【図27】(a)〜(c)は、リーンの制御量を重心の動きを説明するための図である。
【図28】調停処理部の構成を示す図である。
【図29】調停処理の例を示す図である。
【図30】路面状況に応じてリーンの制御量とリーントルクとを制御する位置・トルク振り分け制御部の構成例を説明するためのブロック図である。
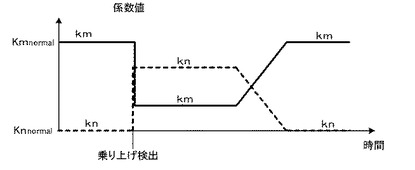
【図31】路面の状況と図30に示す係数KmとKnとの関係を示すマップである。
【図32】車両の乗り上げ時、リーン位置制御及びリーントルク制御を説明するための図である。
【図33】位置・トルク振り分け制御部の他の構成例を示す図である。
【図34】車輪が浮いた時の、リーン位置制御及びリーントルク制御を説明するための図である。
【図35】荷重の偏差と図34に示す係数KmとKnとの関係を示すマップである。
【図36】モータの回転角検出回路の構成例を示す図である。
【図37】(a)は、電源断時にモータの回転角を検出して記憶する動作を説明するためのフローチャート、(b)は、電源投入時に絶対角センサをチェックする動作を説明するためのフローチャートである。
【発明を実施するための形態】
【0016】
以下、この発明の実施の形態に係るモータ駆動装置を備えた車両について説明する。
まず、本実施形態に係る車両10について説明する。
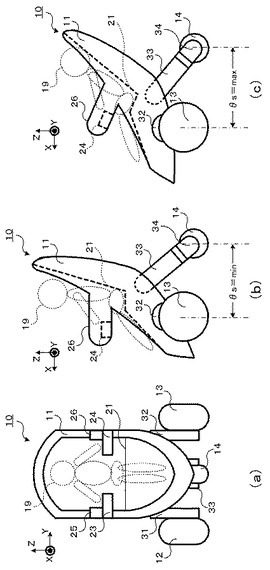
本実施形態に係る車両10は、図1(a)に正面、図1(b)、(c)に側面で示すように、一人乗り用であり、ボディ11と、前右輪12と、前左輪13と、後輪14とを備える三輪車である。
【0017】
ボディ11には、乗車部としてのシート21が1つ設けられている。シートの中間部の左右両側には、アームレスト23と24が配置されている。アームレスト23と24には、グリップ操作装置25、26が設けられている。
【0018】
ボディ11は、その右側面が前右輪12上に配置された前輪右支持機構31で支持され、その左側面が前左輪13上に配置された前輪左支持機構32で支持されている。また、ボディ11の後部中央は、後輪14に接続された後輪支持機構33により支持されている。
【0019】
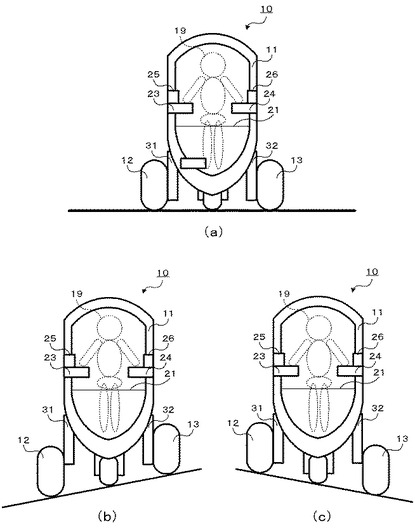
前輪右支持機構31と前輪左支持機構32とは、図2(a)〜(c)に模式的に示すように、独立して上下方向に制御可能に構成されている。これにより、ボディ11は、接地面に対して左右(Y軸方向)及び前後(X軸方向)に揺動する。
【0020】
この明細書において、前輪12,13に対して前輪右支持機構31と前輪左支持機構32とを制御してボディ11を上下する制御をリーン制御と呼ぶ。
【0021】
一方、後輪14は、図1(b)、(c)に示すように、後輪支持機構33を駆動することにより、前後に移動可能である。
【0022】
図1(b)に示すように後輪14が前進すると、ボディ11が起きて、第1モード(人モード)となり、ドライバ19は、シート21に腰を掛けた状態となる。第1モードでは、重心が高くなり、ホイールベース(姿勢制御量:前輪12,13と後輪14との距離)θs[mm]が最小(min)となる。
【0023】
後輪14が後退すると、図1(c)に示すように、ボディ11が後ろに倒れて、第2モード(車両モード)となり、ドライバ19は、シート21の背もたれにもたれた状態となる。また、ホイールベースθs[mm]が最大(max)となり、車両10の重心が、第1モードよりも、後方かつ下側に移動する。
【0024】
後輪支持機構33の先端部(ステアリング部)34は、その長軸を中心に回転可能であり、これにより、後輪14の向きが変化し、車両10が操舵される。
【0025】
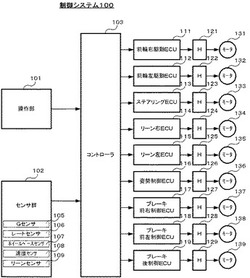
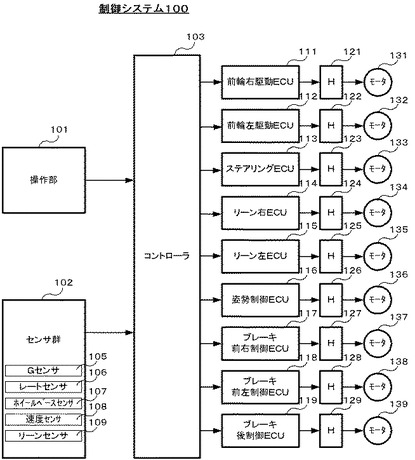
次に、このように構成された車両10の制御システム100について図3を参照して説明する。
【0026】
図示するように、この制御システム100は、操作部101と、センサ群102と、コントローラ103と、前輪右駆動ECU111と、前輪左駆動ECU112と、ステアリングECU113と、リーン右ECU114と、リーン左ECU115と、姿勢制御ECU116と、ブレーキ前右制御ECU117と、ブレーキ前左制御ECU118と、ブレーキ後制御ECU119と、Hブリッジ回路(3相ブリッジ回路)121〜129と、前輪右駆動モータ131と、前輪左駆動モータ132と、ステアリングモータ133と、リーン右制御モータ134と、リーン左制御モータ135と、姿勢制御モータ136と、ブレーキ前右制御モータ137と、ブレーキ前左制御モータ138と、ブレーキ後制御モータ139とを備える。
【0027】
操作部101は、グリップ操作装置25、26を含み、走行・停止、加速・減速、姿勢、進行方向等のドライバからの指示を入力し、コントローラ103に指示信号を出力する。
【0028】
センサ群102は、モータ131〜139に配置された各回転角センサ(レゾルバ)及び電流センサを含む。
【0029】
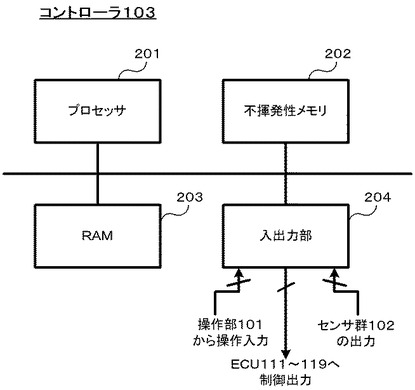
コントローラ103は、図4に示すように、プロセッサ201と、不揮発性メモリ202と、RAM203と、入出力部204とから構成される。
【0030】
プロセッサ201は、不揮発性メモリ202に格納されたプログラムを実行し、モータ131〜139を駆動及び制御するための動作を行う。また、プロセッサ201は、これらの制御を行うため、操作部101への入力及びセンサ群102を構成する各センサの出力を取り込む。
【0031】
不揮発性メモリ202は、ROM(Read Only Memory)、フラッシュメモリ、ハードディスク等から構成され、プロセッサ201が実行する制御プログラムや固定データを記憶する。
【0032】
RAM (Random Access Memory)203は、プロセッサ201のワークメモリとして機能する。
【0033】
入出力部204は、操作部101の操作入力及びセンサ群102を構成するセンサのディジタル出力を取り込んでコントローラ103に供給し、一方、コントローラ103の制御用の出力データを各ECU111〜119に供給する。
【0034】
図3に示す前輪右駆動ECU111は、操作部101からの指示及びセンサ群102を構成する各センサの出力から、Hブリッジ回路121をPWM制御して、前輪右駆動モータ131に供給する電力を制御して、前右輪12の回転を制御する。これにより、車両10の前進・後退とその速度が制御される。
【0035】
前輪左駆動ECU112は、操作部101からの指示及びセンサ群102を構成する各センサの出力から、Hブリッジ回路122をPWM制御して、前輪左駆動モータ132に供給する電力を制御して、前左輪13の回転を制御する。これにより、車両10の前進・後退とその速度が制御される。
【0036】
ステアリングECU113は、操作部101からの指示及びセンサ群102を構成する各センサの出力から、Hブリッジ回路123をPWM制御して、ステアリングモータ133に供給する電力を制御して、ステアリング部34の回転を制御する。これにより、車両10の進行方向が制御される。
【0037】
リーン右ECU114は、操作部101からの指示及びセンサ群102を構成する各センサの出力から、Hブリッジ回路124をPWM制御して、リーン右制御モータ134に供給する電力を制御して、リーン右制御モータ134の回転を制御し、前輪右支持機構31の鉛直方向の位置を制御する。これにより、車両10の接地面に対する左右方向の傾きが制御される。
【0038】
リーン左ECU115は、操作部101からの指示及びセンサ群102を構成する各センサの出力から、Hブリッジ回路125をPWM制御して、リーン左制御モータ135に供給する電力を制御して、リーン左制御モータ135の回転を制御し、前輪左支持機構32の鉛直方向の位置を制御する。これにより、車両10の接地面に対する左右方向の傾きが制御される。
【0039】
姿勢制御ECU116は、操作部101からの指示及びセンサ群102を構成する各センサの出力から、Hブリッジ回路126をPWM制御して、姿勢制御モータ136に供給する電力を制御して、その回転を制御する。これにより、後輪支持機構33が回転駆動され、後輪14が図1(b)、(c)に示すように、前方又は後方に駆動され、これにより、車両10は、第1モードと第2モードとに切り替えられる。
【0040】
ブレーキ前右制御ECU117は、操作部101からの指示及びセンサ群102を構成する各センサの出力から、Hブリッジ回路127をPWM制御して、ブレーキ前右制御モータ137に供給する電力を制御して、その回転を制御し、ブレーキパッド(図示せず)を前右輪12に押し当てて、前右輪12にブレーキをかける。
【0041】
ブレーキ前左制御ECU118は、操作部101からの指示及びセンサ群102を構成する各センサの出力から、Hブリッジ回路128をPWM制御して、ブレーキ前左制御モータ138に供給する電力を制御して、その回転を制御し、ブレーキパッド(図示せず)を前左輪13に押し当てて、前左輪13にブレーキをかける。
【0042】
ブレーキ後制御ECU119は、操作部101からの指示及びセンサ群102を構成する各センサの出力から、Hブリッジ回路129をPWM制御して、ブレーキ後制御モータ139に供給する電力を制御して、その回転を制御し、ブレーキパッド(図示せず)を後輪14に押し当てて、後輪14にブレーキをかける。
【0043】
なお、各ECU111〜119の基本構成は、図4に示すコントローラ103の基本構成と同一である。但し、その機能が特化されている。また、対応するHブリッジ回路121〜129を駆動するために、PWM回路を備えている。
【0044】
Hブリッジ回路121〜129は、ECU111〜119の制御に従って、対応するモータ131〜139に、U,V,Wに三相の電流を供給し、その回転を制御する。
【0045】
次に、制御システム100による車両10の姿勢を安定化して転倒を予防する姿勢安定制御について説明する。
【0046】
操作部101は、前述のグリップ操作装置25,26を含み、走行・停止、加速・減速、姿勢、進行方向等のドライバ19からの指示を入力し、コントローラ103に指示信号を出力する。
【0047】
センサ群102は、G(加速度)センサ105と、レートセンサ106と、ホイールベースセンサ107と、速度センサ108、リーンセンサ109等を含み、各センサの検出信号をコントローラ103に供給する。
【0048】
Gセンサ105は、X軸方向(車両10の進行方向)の加速度を測定するX軸方向G(加速度)センサ、Y軸方向(車両10の左右方向)の加速度を測定するY軸方向Gセンサ、Z軸方向(車両10の鉛直方向)の加速度を測定するZ軸方向Gセンサ、を備える。
【0049】
Gセンサ105は、車両10の重心位置から物理的に離れた位置に設置されており、ホイールベースθsの変化により、その位置と車両10の重心までの距離は変化する。
【0050】
レートセンサ106は、ジャイロなどから構成され、Z軸方向の揺れヨー(yawsen)と、Y軸方向の揺れロール(rollsen)、X軸方向の揺れピッチ(pitchsen)を検出し、検出信号を出力する。レートセンサ106も、車両10の重心位置から物理的に離れた位置に設置されており、ホイールベースθsの変化により、その位置と車両10の重心までの距離は変化する。
【0051】
ホイールベースセンサ107は、図1(b)、(c)に示すホイールベースθs[mm]を求める。
速度センサ108は、車軸の回転速度等から、車両10の速度Vを求める。
リーンセンサ109は、前輪右支持機構31及び前輪左支持機構32による高さ方向の制御量(リーン制御量)を測定する。
【0052】
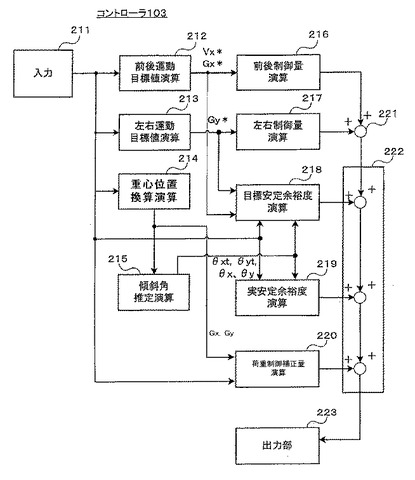
コントローラ103を構成するプロセッサ201は、不揮発性メモリ202に格納されたプログラムとの協働により、機能的に、図5に示すように、入力部211と、前後運動目標値演算部212、左右運動目標値演算部213と、重心位置換算演算部214と、傾斜角推定演算部215と、前後制御量演算部216と、左右制御量演算部217と、目標安定余裕度演算部218と、実安定余裕度演算部219と、荷重制御補正量演算部220と、加算器221と、調停処理部222と、出力部223とを備える。
【0053】
入力部211は、操作部101、センサ群102等からの信号を入力し、ノイズを除去するフィルタ処理、各種変換処理、単位を変換する単位変換処理等を行う。
【0054】
前後運動目標値演算部212は、操作部101からの入力及びセンサ群102からの入力等に基づいて、車両10の速度の前後方向(X軸方向)の目標値Vx*と加速度の目標値Gx*を求めて出力する。
【0055】
左右運動目標値演算部213は、操作部101からの入力及びセンサ群102からの入力等に基づいて、車両10の左右方向(Y軸方向)の加速度の目標値Gy*を求めて出力する。
【0056】
重心位置換算演算部214は、車両10の重心位置からずれた位置に設置されているGセンサ105の出力から、重心位置CGでの前後方向の加速度Gx,左右方向の加速度Gy,上下方向の加速度Gzを求めて出力する。
具体的には、重心位置換算演算部214は、加速度センサの測定値Gxsen、Gysen,Gzsenを(1)式に適用して重心位置CGでのX軸方向(車両進行方向)の加速度Gx、Y軸(車両左右方向)方向の加速度Gy,Z軸方向(車両上下方向)の加速度Gzを求める。
【0057】
【数1】

・・・ (1)
【0058】
ここで、
Gxは、Gセンサ105が車両10の重心位置に設置されていた場合に、測定したと予想されるX軸方向の加速度[m/s2]を表す。
Gyは、Gセンサ105が車両10の重心位置に設置されていた場合に、測定したと予想されるY軸方向の加速度[m/s2]を表す。
Gzは、Gセンサ105が車両10の重心位置CGに設置されていた場合に、測定したと予想されるZ軸方向の加速度[m/s2]を表す。
【0059】
Gxsenは、Gセンサ105のX軸方向の加速度の測定値[m/s2]を表す。
Gysenは、Gセンサ105のY軸方向の加速度の測定値[m/s2]を表す。
Gzsenは、Gセンサ105のZ軸方向の加速度の測定値[m/s2]を表す。
【0060】
yawsenは、レートセンサ106が検出したヨー[m/s]を表す。
rollsenは、レートセンサ106が検出したロール[m/s]を表す。
pitchsenは、レートセンサ106が検出したピッチ[m/s]を表す。
【0061】
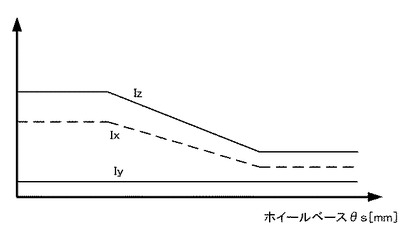
また、I=(Ix Iy Iz)は、車両10の重心からGセンサ105へのベクトルであり、車両10の姿勢により変化する。車両10の姿勢は、図1(b)、(c)に示すホイールベースθsで表すことができる。そこで、本実施形態では、ベクトルIをホイールベースθsに応じて予め求めて、図7に示すようにマップ化して不揮発性メモリ202に格納し、ホイールベースセンサ107が測定したホイールベースθsを適用して求めるものとする。
【0062】
図5の傾斜角推定演算部215は、車両10が位置している路面の傾きを求める。
路面の傾きを求めるため、傾斜角推定演算部215は、まず、レートセンサ106の出力から、傾斜による影響を補正したロールroll、ピッチpitch、ヨーyawを次式(2)に従って求める。
roll=rollsen・cosθx1+yawsen・sinθx1
pitch=pitchsen・cosθy1+yawsen・sinθy1
yaw=yawsen・cosθx1・cosy1+rollsen・sinθx1+pitchsen・sinθy1
・・・(2)
【0063】
ここで、θx1=θxs+θxL θy1=θyLである。
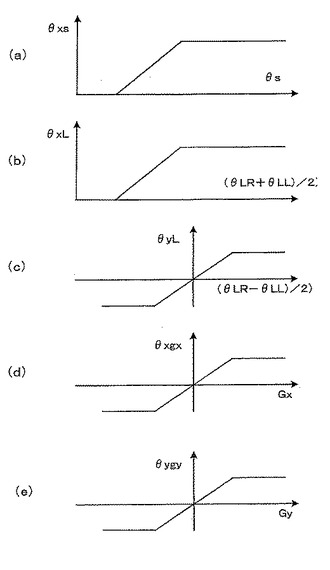
θxsは、ホイールベースθsのX軸方向成分であり、ホイールベースセンサ107により検出されたホイールベースθsに基づいて、図9(a)に示すマップにより求められる。
θxLは、リーン制御(支持機構31、32によりボディ11が前後方向に傾く)によるθx角であり、図9(b)に示すマップにより求められる。また、θyLは、リーン制御によるθy角であり、図9(c)に示すマップによる定まる。図9(b)、(c)において、θLRは、前輪右支持機構31のリーン制御量[mm]、θLLは前輪左支持機構32のリーン制御量[mm]であり、リーンセンサ109により求められる。
【0064】
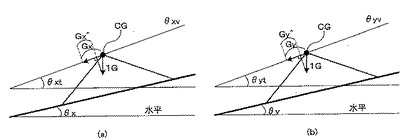
次に、図5の傾斜角推定演算部215は、図8(a)、(b)に示すように、車両10の重心位置CGの傾き(傾斜角)θxt、θytを次式により求める。
θxt=[asin((Gx−Gx^−Kα0・|yaw・V|)/1G)]−Kαx・|LENactR−LENactL|
θyt=[asin((Gy−Gy^)/1G)]−sign(θyt)・Kαy・|LeNactR−LENactL|
signは、θytの符号を表す。
θytの符号は、θyt>0ならば+、θyt<0ならば−である。
【0065】
ここで、Gxは、Gセンサ105が測定した重心位置CGでのX軸方向(前後方向)の加速度であり、Gx^は、重力(1G)の影響を除去したX軸方向の加速度を表す。同様に、Gyは、Gセンサ105が測定した重心位置CGでのY軸方向の加速度であり、Gy^は、重力の影響を除去した、Y軸方向の加速度を表す。
従って、
Gx=1G・sinθxt+Gx^ と、
Gy=1G・sinθyt+Gy^
が成立する。
【0066】
また、Kα0,Kαx、Kαyは、それぞれ十分に小さい値であり、これらの係数を含む項は無視可能である。
【0067】
このため、
θxt=asin(Gx−Gx^)/1G
θyt=asin(Gy−Gy^)/1G と近似できる。
【0068】
さらに、
Gx^=d(V)/dt、
dy^=−yaw・V が成立する。
ここで、Vは、車両10の速度であり、速度センサ108により測定され、例えば、前右輪12の速度VfRと前左輪13の速度VfLの平均値で表すことが可能である。
このようにして、傾斜角推定演算部215は、Gセンサ105の出力を重心位置CGに換算した値Gx,Gyと、車速度Vと、レートセンサ106の値から、車両10の重心位置CGの傾き(傾斜角)θxt、θytを求める。
【0069】
次に、傾斜角推定演算部215は、図8に示すX軸、Y軸方向の路面傾斜角θx、θy、即ち車両10が位置している路面の水平に対する傾きを求める。
ここで、次式が成立する。
θxt=θx+(θxs)+θxL+θxgx+θxε+θxv=θxv
θyt=θy+ +θyL+θvgy+θvε+θyv=θyv
【0070】
ここで、θxとθyは、路面傾斜を示し、(θxs)+θxLとθxLとは、車両姿勢を示し、θxgxとθygyは、車両運動を示し、θxεとθyεとは、その他の要素を示し、θxvとθyvとは、車両単独での傾斜分を示す。
θxLは前後(X軸)方向の路面の傾斜角、θyは左右(Y軸)方向の路面の傾斜角である。
θxsは、ホイールベースθsに依存する前後方向の角度であり、図9(a)の特性図で求められる。なお、マップの作成手法によっては、θxLに含めることにより、この項は不要となる。
θxは、前輪に対するボディのZ軸方向の位置(高さ)により定まる値であり、図9(b)の特性図で得られる。すなわち、リーン制御量[mm]の前後方向の傾き角度を示す値であり、前右輪12に対するボディ11の基準位置からの制御量θLRと前左輪13に対するボディ11の基準位置からの制御量θLLとの平均値((θLR+θLL)/2)である。
【0071】
また、θyLは、リーン制御量(mm)に対する横方向の傾き角度を示す値であり、((θLR−θLL)/2)に依存し、図9(c)の特性図で得られる。
【0072】
さらに、θxgxは、Gx,すなわち、車両10のX軸方向の加速度Gxによるθx角であり、重心位置換算演算部214で求めた加速度Gxを図9(d)に示すマップに適用して得られる。
さらに、θygyは、Gy,すなわち、車両10のY軸方向の加速度Gyによるθy角であり、重心位置換算演算部214で求めた加速度Gyを図9(e)に示すマップに適用して得られる。
なお、θxv、θyvは、それぞれ、全傾斜のうち路面の傾斜分を除外した車両10単独での傾斜分である。従って、次式が成立する。
θx=θxt−θxv θy=θyt−θyv
【0073】
傾斜角推定演算部215は、上式に基づいて、車両10が位置する路面の傾斜角θxとθyを求める。
【0074】
前後制御量演算部216は、前後運動目標値演算部212から供給された速度の目標値Vx*と加速度の目標値Gx*に基づいて、指示された加速度と速度とを実現するために、前輪駆動モータ131,132、ブレーキ駆動モータ137〜139の操作量を求める。
【0075】
左右制御量演算部217は、左右運動目標値演算部213から供給された加速度の目標値Gy*に基づいて、ステアリングモータ133、リーン右制御モータ134、リーン左制御モータ135の操作量を求める。
【0076】
通常は、前後制御量演算部216の出力と左右制御量演算部217の出力とに基づいて、モータ131〜139が制御される。
しかし、本実施形態では、車両10の安定性を高めるために、これに補正を加え、車両10の転倒安定余裕をアクティブに大きくする制御を行う。このため、目標安定余裕度演算部218と実安定余裕度演算部219が配置されている。
【0077】
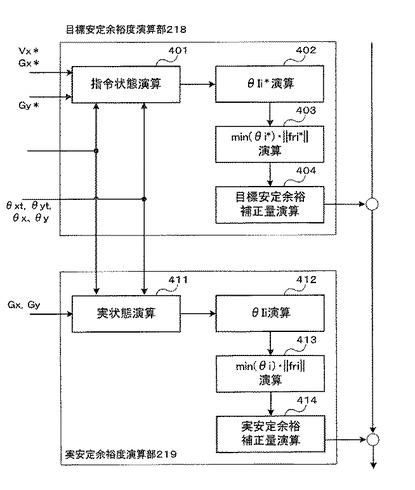
目標安定余裕度演算部218は、目標値のままに車両10が挙動した場合の転倒安定余裕度を求め、安定度を高めるための補正量を求める回路である。目標安定余裕度演算部218は、図6に示すように、指令状態演算部401と、θIi*演算部402と、min(θi*)・||fri*||演算部403と、目標安定余裕補正量演算部404とを備える。
【0078】
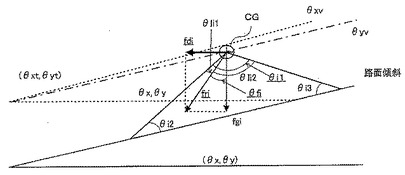
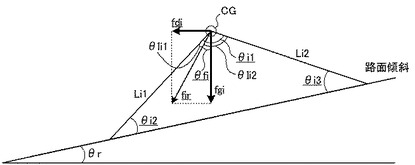
指令状態演算部401は、図10に示すように、車両10が傾きθx、θyの路面に立脚していることを前提として、指令に従った動作によって車両10(の重心)に加わる外力fd*と重力fg*を求め、さらに、その合成力であるfrを求める。ただし、ここでは、fg*=1Gとする。
【0079】
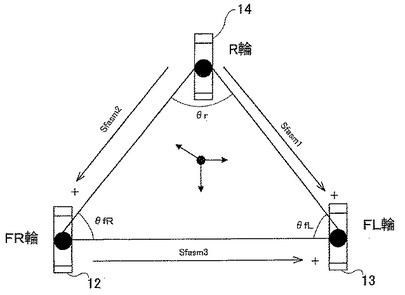
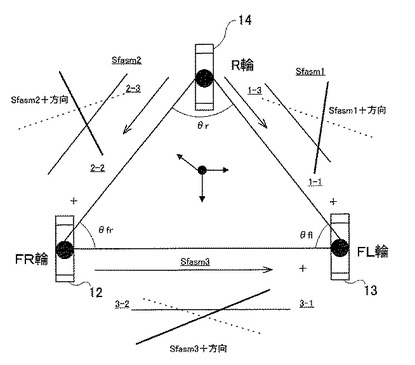
図11に示すように、車両10が倒れる場合、その回転軸は、3つの支持脚(車輪12,13,14)を結ぶ3辺のいずれかである、そこで、3辺に符号i(i=1,2,3)を付し、倒れ易い方向(前方)を正として、転倒安定余裕度Sfasmi*(i=1,2、3)を定義する。
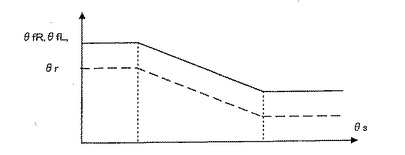
なお、図11の各角度、θr、θfR、θfLは、姿勢制御量θsによって変化する。このため、これらの角は、図12に例示するマップにより求めることができる。
【0080】
指令状態演算部401は、各辺について、外力fdi(i=1,2,3)を、次式により求める。
転倒安定余裕度Sfasm1*(i=1)について:
fd1*=m*(Gx*)・cos(θr/2)・cosθx+(Gy*)・sin(θr/2)・cosθy
転倒安定余裕度Sfasm2*(i=2)について:
fd2*=m*(Gx*)*cos(θr/2)*cosθx−(Gy*)*sin(θr/2)*cosθy
転倒安定余裕度Sfasm3*(i=3)について:
fd3*=m・(−Gy*)・cos(θy)
【0081】
なお、mは、車両10の質量、
Gx*は、重心における車両のX軸方向の目標加速度、
Gy*は、重心における車両のY軸方向の目標加速度、
θrは、前右輪12と後輪14を結ぶ線と、前左輪13と後輪14を結ぶ線との成す角、
θx、θyは、路面のX軸方向及びY軸方向の傾斜角である。
【0082】
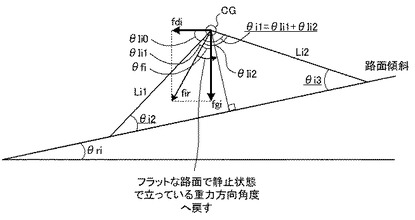
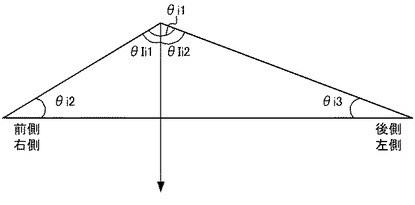
指令状態演算部401は続いて、θi1*(θ11*〜θ31*)、θi2*(θ12*〜θ32*)、θi3*(θ31*〜θ33*)を求める。
これらの角度は、図10に示すように、ボディを支える3つの車輪12〜14と重心CGとを結ぶラインとの交差角であり、θ11*、θ12*、θ13*は、車輪13と14と重心とを結ぶ3辺が形成する角度であり、θ21*、θ22*、θ23*は、車輪12と14と重心とを結ぶ3辺が形成する角度であり、θ31*、θ32*、θ33*は、車輪12と13と重心とを結ぶ3辺が形成する角度である。
【0083】
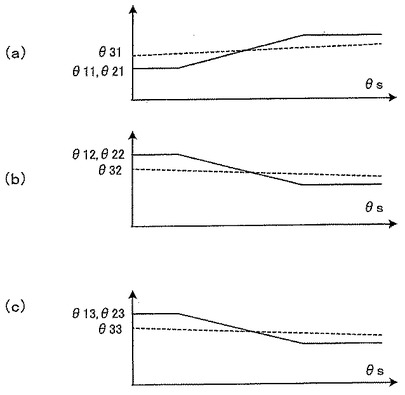
前述のように、車両10の重心CGの位置と後輪14の位置は、姿勢制御量θsに対応している。そこで、指令状態演算部401は、角度θiと姿勢制御量θsとの関係を図13(a)〜(c)に示すθsマップにより求める。
【0084】
さらに、指令状態演算部401は外力と重力の合成力fri*を次式により求める。
fri*=√{fdi*2+fgi*2)}
【0085】
θIi*演算部402は、転倒安定余裕度Sfasmi*、即ち、車両10が転倒するまでにどの程度の余裕があるかを示す指標を演算するため、図14に示すように、車輪12〜14と重心CGを結ぶラインと合成力friが成す角度θIi1*とθIi2*を求める。
この角度も、車輪12〜14が形成する三角形の各辺(i=1〜3)について求める。
まず、θi1*〜θi3*を、図13(a)〜(c)に示すθsマップで求める。
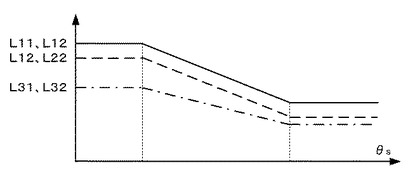
また、角度θIi1*とθIi2*とは、車輪と重心点CGとの結ぶ脚の長さLi1,Li2によっても変化する。このため、脚の長さLi1,Li2を図15に示す姿勢制御量θsに対するマップにより求める。
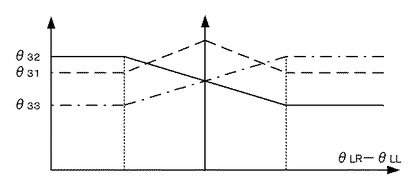
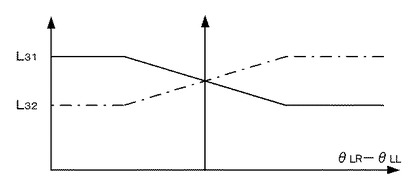
さらに、正面から見たときに、車輪と重心とが形成する三角形の角度は、リーン制御量によっても変化する。そこで、θ3i、L31,L32を、図16と図17とにより求める。
【0086】
最終的に、
θIi*演算部402は、θIi1*、θIi2を次式に従って求める。
θIi0=−θri*+θi2
θIi1*=π/2−θIi0*−θfi*
θIi2=θi1−θIi1*
【0087】
次に、min(θIi*)・||fri*||演算部403は、転倒安定余裕度Sfasmi*をθIi1*,θIi2*,fri*より、次式に従って求める。
Sfasmi*=min(θIi*)・||fri*||
すなわち、転倒安定余裕度Sfasmi*をθIi*のうちの最小のものとfrii*のノルムとを乗算して求める。
【0088】
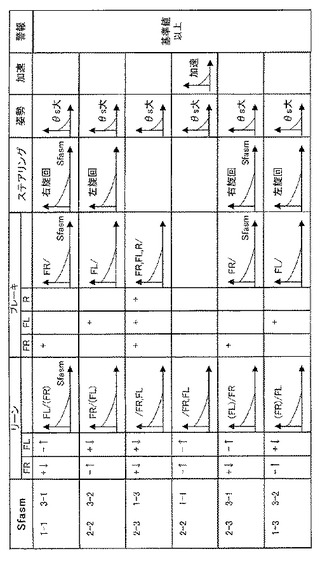
続いて、目標安定余裕補正量演算部404は、図18に示す複数の方向のうちから、安定余裕度Sfasmi*が最も小さい方向、即ち、最も転倒が起こりやすい方向を求める。
そして、図19に示すように、その方向における重心からの力が、フラットな路面で静止状態で立っている重力方向角(路面に垂直な方向)に一致するように、換言すると、角度friを0に修正するように、各モータ131〜139が動作すべき量に対応する制御量を補正量として求めて設定する。
【0089】
この補正量を求めるため、本実施形態では、図20に示すように、場面毎に補正量を予め設定しておき、適切なものを優先順位を付けて選択することとする。
具体的には、(π/2−θi2)−θIi1*が最大となるSfasmi*を求め、その内容に従って、補正量を求める。
【0090】
例えば、図18に示す2−3線の方向への転倒の可能性が最も大きいとすれば、2−3線の方向の(π/2−θi2)−θIi1*が最大となり、このとき1−3線の方向も同極性の場合には、図20の第3エントリが選択される。
これにより、まず、前右輪12と前左輪13のリーンを下げる補正が設定される。その量は、Sfasm*が大きくなるに従って、小さくなる。また、全ての車輪12〜14にブレーキをかける。ブレーキの程度は、Sfasm*が大きくなるに従って、小さくなる。
【0091】
また、ステアリングの補正は行わない。
以上の処理が実行できない場合には、姿勢制御量(ホイールベース)θsを大きくし、重心を低下させる。以上の処理ができない場合には、車両10の加速度を低下させる。
なお、警報は、Sfasm*が最小値よりも小さければ行う。
【0092】
実安定余裕度演算部219は、車両10の現在の実際の状態に基づいて車両10の安定余裕度を求める回路であり、実状態演算部411と、θIi演算部412と、min(θi)・||fri||演算部413と、実安定余裕補正量演算部414とを備える。
【0093】
実状態演算部411、θIi演算部412、min(θi)・||fri||演算部413、実安定余裕補正量演算部414は、基本的に、指令状態演算部401、θIi*演算部402、min(θi*)・||fri*||演算部403、目標安定余裕補正量演算部404と、構成及び機能が同一である。但し、演算の根拠となるデータが目標値では無く車両の現在の実際の値である点が異なる。
【0094】
具体的には、実状態演算部411は、Sfasm1に関して、
fd1=m・{(Gx1−KG・sinθxt)・cos(θr/2)・cosθxt+(Gy1−KG・sin(θyt)・sin(θr/2)・cosθyt}=(x方向の成分)+(y方向の成分)、
fg1=m・{(Gz/((cosθxt)・(cosyt))} を求める。
【0095】
また、実状態演算部411は、Sfasm2に関して、
fd2=m・{(Gx1−KG・sinθxt)・cos(θr/2)・cosθxt−(Gy1−KG・sinθyt)・sin(θr/2)・cosθyt}、
fg2=m・{(Gz/((cosθxt)・(cosyt))} を求める。
【0096】
さらに、実状態演算部411は、Sfasm3に関して、
fd3=m・{−(Gy1−KG・sinθyt)・cosθyt}、
fg2=m・{(Gz/((cosθxt)・(cosyt))} を求める。
【0097】
ここで、KGは、例えば、1G、fdiは、減速方向を正、fgiは重力方向を正とする。
また、Gx1=Gx−Kclx・Gx^、Gy1=Gy−Kcly・Gy^である。
ここで、Gxは、重心換算GセンサのX軸方向の値、Gyは、重心換算GセンサのY軸方向の値、Gx^は、車両前後方向のG(=dV/dt)、Gy^は、車両左右¥方向のG(=yaw・V)であり、Kclx、Kclyは所定の係数であり、固定値でも、姿勢制御量θsに従って変化させる等してもよい。
【0098】
また、実状態演算部411は、姿勢制御量θsに対するマップを用いて、θi1(θ11〜θ31)、θi2(θ12〜θ32)、θi3(θ31〜θ33)を求める。
さらに、fri=√{fdi2+fgi2)}を求める。
【0099】
続いて、θIi演算部412は、図14に示す角度θIi1とθIi2を、図13(a)〜(c)、図15に示すθsマップ等を使用して求める。
θIi演算部412は、θIi1、θIi2を次式に従って求める。
θIi0=−θri+θi2
θIi1=π/2−θIi0−θfi
θIi2=θi1−θIi1
【0100】
続いて、min(θi)・||fri||演算部413は、転倒安定余裕度Sfasmiを、θIi1,θIi2,friより、次式に従って求める。
Sfasmi=min(θIi)・||fri||
【0101】
実安定余裕補正量演算部414は、目標安定余裕補正量演算部404と、構成及び機能が同一である。但し、演算の根拠となるデータが目標値では無く車両の現在の実際の値である点が異なる。
【0102】
続いて、実安定余裕補正量演算部414は、図18に示す複数の方向(1−1,1−3,2−2,2−3,3−1,3−2)のうちから、転倒安定余裕度Sfasmiが最も小さい方向を求め、その方向における重心からの力が、フラットな路面で静止状態で立っている重力方向角(路面に垂直な方向)に一致するように、補正量を設定する。この補正量を求めるため、本実施形態では、図20に示すように、場面毎(転倒しやすい方向毎)に補正量を予め設定しておき、適切なものを優先度を付して選択することとする。
【0103】
例えば、図20の第1行は、最も倒れやすい方向が図18の方向1−1と3−1の方向であり、その場合、FR(前輪右)リーンを正方向(ボディ11を下げる方向)に制御し、FL(前輪左)リーンを負方向(ボディ11を持ち上げる方向)に補正制御することを示す。また、リーンの量は、安定余裕度Sfasmが小さくなるに従って、リーン量の量を大きくすることを示す。この場合、FRとFLとは逆方向にリーンするので、逆相となる。さらに、例えば、リーンだけで補正が十分でない場合には、前右輪12にブレーキをかけることにより減速し(FR+)、ブレーキの程度は、転倒安定余裕度Sfasmが大きくなるに従って、大きくなる。さらに、必要ならば、ステアリングを右旋回する。さらに、可能ならば、姿勢制御量(ホイールベース)θsを大きくする。
なお、警報は、Sfasmが最小値よりも小さければ行う。
【0104】
また、前述のように、例えば、図18に示す2−3線の方向への転倒の可能性が最も大きいとすれば、2−3線の方向の(π/2−θi2)−θIi1が最大となり、このとき1−3線の方向も同極性の場合には、図20の第3エントリが選択される。これにより、まず、前右輪12と前左輪13のリーンを下げる補正が設定される。その量は、Sfasmが大きくなるに従って、小さくなる。また、全ての車輪12〜14にブレーキをかける。ブレーキの程度は、Sfasmが大きくなるに従って、小さくなる。また、ステアリングの補正は行わない。以上の処理が実行できない場合には、姿勢制御量θsを大きくし、重心を低下させる。θsは、Sfasmが大きくなるに従って小さくなる。
なお、警報は、Sfasmが最小値よりも小さければ行う。
【0105】
演算処理により、制御量を求めることも可能である。この場合、コントローラ103は、次のようにして姿勢安定化制御を行う。
まず、車両10の姿勢の補正は、基本的には、コントローラ103とリーン右ECU114とリーン左ECU115によるリーンの制御で行う。
【0106】
まず、コントローラ103は、転倒安定余裕度Sfasmi(Sfasm1〜Sfasm3)、及び、Sfasmi*(Sfasm1*〜Sfasm3*)について、制御角LENradrefi(LENradref1〜LENradref3)と、LENradrefi*(LENradref1*〜LENradref3*)[rad]を次式に従って求める。
【0107】
LENradref1 =-kcl・((π/2-θ12)-θI11) = kcl・((π/2-θ13)-θI12)
LENradref2 = [kcl・((π/2-θ22)-θI21)] = [kcl・((π/2-θ23)-θI22)]
LENradref3 = [kcl・((π/2-θ32)-θI31)]/2 = [kcl・((π/2-θ23)-θI22)]/2
LENradref1* = -kcl・((π/2-θ12)-θI11*) = kcl・((π/2-θ13)-θI12*)
LENradref2* = [kcl・((π/2-θ22)-θI21*)] = [kcl・((π/2-θ23)-θI22*)]
LENradref3*=[kcl・((π/2-θ32)-θI31*)]/2 = [kcl・((π/2-θ23)-θI22*)]/2
【0108】
なお、各式の前段は、図21に示す各制御面のθi2側の制御角、後段はθi3側の制御角である。
【0109】
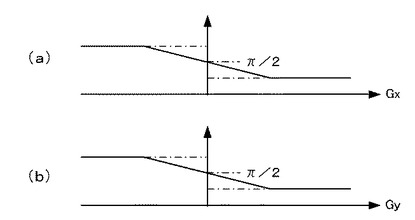
ここで、基準となる、「π/2」については、図22(a)に示すように、進行方向の加速度(重力の影響を含む)Gxに従ってリーン量を制御し、減速時には、π/2を若干大きくして、π/2+αとし、加速時には、π/2−αとする。これにより、減速時は少し前屈みに、加速時は少し後ろ屈みにする。同様に、図22(b)に示すように、Gyによってリーン量を制御し、旋回時には、旋回方向に屈むようする。
【0110】
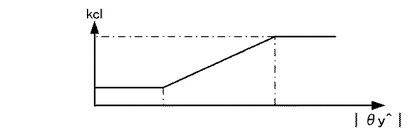
また、係数kclは、人モードでは、基準値(固定値)とする。
一方、車モードでは、係数kclは、図23に示す係数マップで、重力の影響を除去したY(横)軸方向の加速度θy^の絶対値に基づいて定まる。この例では、係数kclは、加速度θy^の絶対値の増加に伴って一定値→線形に増加→一定値という増加関数の形態をとる。
【0111】
次に、((π/2)−θi2)が最大となる面「i」(i=1〜3)を特定し、そのときの転倒安定余裕度SfasmiとSfasmi*を最小値として選択する。即ち、Sfasm1〜Sfasm3のうち最小のものと、Sfasm1*〜Sfasm3*のうち最小のものと、を選択する。
【0112】
次に、選択したiに相当する制御角|LENradrefi|と|LENradrefi*|を抽出し、|LENradrefi|、|LENradrefi*|>Kmoenが成立するか否かを判別する。Kmoenは、基準値、例えば、0radである。
【0113】
|LENradrefi|、|LENradrefi*|>Kmoenが成立する場合、次のi)とii)のいずれかの手法で補正量を求める。
i)リーン制御量(rad):ΣLENradrefi(i=1,2,3),ΣLENradrefi*(i=1,2,3)即ち、1,2、3面の制御角の加算値を最終制御角とする。
ii)LENradrefi(1,2,3)のうちの最大値を最終制御角とする。
【0114】
次に、各制御対象により、最終的な制御量とその形態が異なるため、変換演算を行う。リーン制御の場合は、最終的には、制御量は直線運動であるので角度[rad]を長さ[mm]に変換する。
まず、最小であると判定されたSfasmのFRとFLの符号から、リーン量が同相か同相でないかを判別する。
FRの移動方向とFLの移動方向(姿勢制御のためのリーン右制御モータ134とリーン左制御モータ135の回転方向)とが同一の場合には、同相となる。
【0115】
制御量が同相の場合、まず、実安定余裕度について、次式に従って、制御角の和(ΣLENradrefi)[rad]を上下動の量[mm]に変換し、LENrefi=θs・tan(ΣLENradrefi)mm とする。即ち、リーン右制御モータ134とリーン左制御モータ135を駆動して、ボディ11を右方も左方もLENrefimmだけ上昇又は下降させることとする。これにより、ボディ11が前後方向に傾斜する。
同様に、目標安定余裕について、LEnrefi*=θs・tan(ΣLENradrefi*)mm(前後傾斜mm)とする。
【0116】
また、制御量が同相でない場合、実安定余裕度について、次式に従って、制御角の和(ΣLENradrefi)[rad]を左右の傾斜[mm]に変換する。LENrefi=Td・tan(ΣLENradrefi)mm
さらに、目標安定余裕度について、次式に従って、制御角の和(ΣLENradrefi*)[rad]を左右の傾斜[mm]に変換する。LEnrefi*=Td・tan(ΣLENradrefi*)mm
ここで、トレッドTdは、前右輪12の中心と、前左輪13の中心の間の距離である。
【0117】
なお、以上の例は、上記i)の3面の制御角の加算値を最終制御角とする例であるが、ii)の3面の制御角のうちの最大制御角を最終制御角とする場合には、LENadrefi=klc・[((π/2−θi2)−θIi2)の最大値]となる。
【0118】
なお、上述の手法とは異なり、リーン右の各リーン制御量とリーン左のリーン制御量とを、目標値と実値別に、次に式に従って個別に求めても良い。
リーン右の、実値にも基づくリーン量:
LENref1=K0・K10・(L23・tan(LENradref2))+K1・K11・(L33・tan(LENradref3))/2
リーン左の、実値にも基づくリーン量:
LENref2=K0・K20・(L13・tan(LENradref2))+K1・K21・(−L33・tan(LENradref3))/2
リーン右の、目標値にも基づくリーン量:
LENref1*=K0・K10・(L23・tan(LENradref2))+K1・K11・(L33・tan(LENradref3*))/2
リーン左の、目標にも基づくリーン量:
LENref2*=K0・K20・(L13・tan(LENradref2))+K1・K21・(−L33・tan(LENradref3*))/2
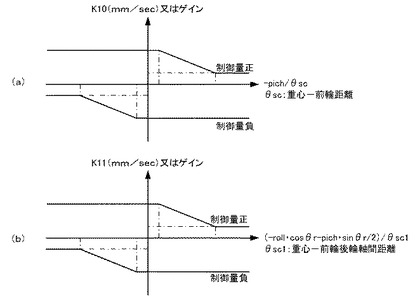
ここで、K10は、例えば、図24(a)に示す上下限値で定まる。また、K11は、図24(b)に示す上下限値で定まる。
【0119】
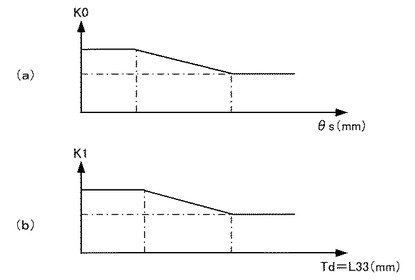
さらに、K0は、図25(a)に示すように、姿勢制御量(ホイールベース)θsにより定まる係数、k1は、図25(b)に示すように、前右輪12と前左輪13の距離であるトレッドTdにより定まる値である。なお、図1に示す構成の車両10では、Tdは固定値である。
【0120】
また、上式における「tan(LENradref3)/2」は、リーンの制御については、左右のリーンの差及び重心の位置の低下で行うことにより、最初は、ドライバ19に安心感を持たせ、かつ、制御量が大きくなるように、下記の制御を加えることが望ましい。
【0121】
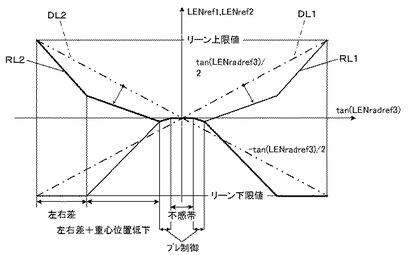
即ち、図26に一点鎖線DL1で示されているtan(LENradref3)/2(直線)を、実線RL1で示すように、折れ線化する。同様に、二点鎖線DL2で示されている−tan(LENradref3)/2(直線)を、実線RL2で示すように、折れ線化する。
【0122】
これにより、リーンの変化が小さい領域に、tan(LENradref3)が変化しても、LENref1とLENref2が変化しない不感帯を配置し、続いて、わずかに変化するプレ制御帯を配置する。その両側にtan(LENradref3)の変化に対するLENref1及びLENref2の変化よりも傾きの大きい左右差+重心位置低下帯を配置し、さらに、その両側にLENref1又はLENref2の一方のみが変化する左右差帯を設ける。このような制御とすれば、ドライバ19に安心感を持たせつつ、制御量を大きくとることが可能となる。
【0123】
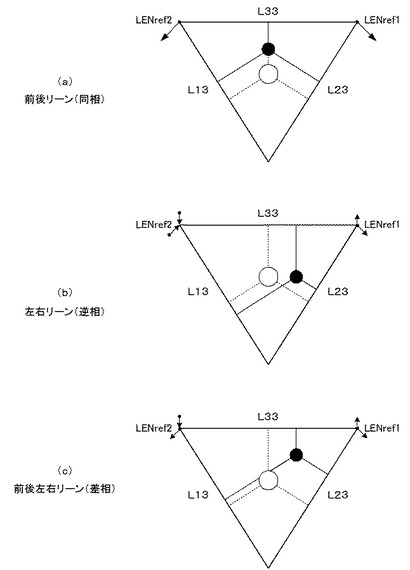
このような制御形態をとると、例えば、車両10の倒れやすい方向が、2−2と1−1で示される場合に、例えば、図27(a)に示すように、リーン右をLENref1だけ上げ(符号は−)、リーン左をLENref2だけ上げると(但し、LENref1=LENref2)、車体10が後方に倒れ、例えば、黒丸で示す前方に偏った状態の重心が白丸で示す中心位置に移動し、車両が安定する。
【0124】
同様に、例えば、車両10の倒れやすい方向が、2−2と3−2で示される場合に、例えば、図27(b)に示すように、リーン右をLENref1だけ上げ(符号は−)、リーン左をLENref2だけ下げる(符号は+)と(但し、|LENref1|=|LENref2|)、車体10が左方に倒れ、例えば、黒丸で示す右方に偏った状態の重心が白丸で示す中心位置に移動し、車両が安定する。
【0125】
また、例えば、車両10の倒れやすい方向が、2−2と3−2で示され、車両の重心が前方に偏っている場合に、例えば、図27(c)に示すように、リーン右をLENref1だけ上げ(符号は−)、リーン左をLENref2だけ下げ(符号は+)と、全体としてはボディ11を持ち上げるようにすると、車体10が後方及び左方に倒れ、例えば、黒丸で示す右方前方に偏った状態の重心が白丸で示す中心位置に移動し、車両が安定する。
【0126】
コントローラ103は、最終的な制御出力を、次式に示すPD(比例微分)制御出力とする。
PD制御出力=LENrefin+Kd・(LENrefin−LENrefi(n−4))/(4/Ts)
即ち、
現在(t=n)のタイミングで、上述の手法で求めたLENrefi=LENrefinと、4動作クロック前のタイミング(t=n−4)でのLENrefi=LENrefi(n−4)との差を4クロック時間4・Tsで割った値に係数Kdを乗算したD項(微分項)に、LENrefin(P(比例)項)を加算した値となる。
【0127】
従って、コントローラ103の最終出力は、
LENref1n+Kd・(LENref1n−LENref1(n−4))/(4/Ts)
LENref2n+Kd・(LENref2n−LENref2(n−4))/(4/Ts)
LENref1n*+Kd・(LENref1n*−LENref1(n−4)*)/(4/Ts)
LENref2n*+Kd・(LENref2n*−LENref2(n−4)*)/(4/Ts)
の4つとなる。
【0128】
上述したように、姿勢安定化制御は、上記リーンによる制御が原則であるが、転倒安定余裕度がなくなる(−の方向に変化する)と、図20に示す順番に、ブレーキの制御、ステアリングの制御、姿勢の制御、加速度の制御の順に制御を加味し、転倒を予防する。
【0129】
こうして、目標安定余裕度演算部218と実安定余裕度演算部219により、目標値に従って動作する場合においても、現状においても転倒の不安定な状態が起こらないような補正が生成される。
また、荷重制御補正量演算部220は、加重の大きさに応じて、補正量を設定する。
【0130】
加算器221は、前後制御量演算部216の出力する制御信号と左右制御量演算部217の出力する制御信号との対応するもの同士を加算して出力する。
【0131】
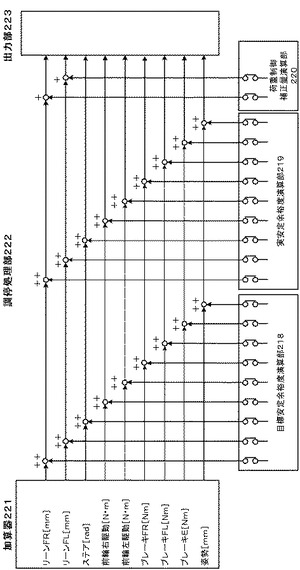
次に、調停処理部222は、目標安定余裕度演算部218により生成された目標安定余裕補正量と実安定余裕度演算部219により生成された実安定余裕補正量とを、前後制御量演算結果と左右制御量演算結果に加算して補正する。
具体的には、調停処理部222は、例えば、図28に示すような構成を有し、前後制御量演算部216、左右制御量演算部217が出力する、各制御量に、目標安定余裕度演算部218が生成した補正量と、実安定余裕度演算部219が生成した補正量と、荷重制御補正量演算部220が生成した補正量とを加算して、出力部223に出力する。
【0132】
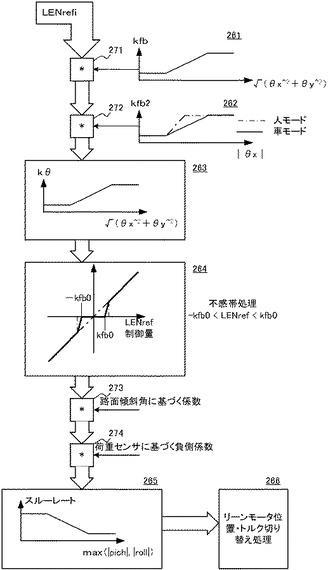
このうち、調停処理部222は、リーン制御については、以下のマップ演算により、補正量を状況に応じてさらに補正して、差分を加算する。
まず、図29に示すように、上述の説明で得られた制御量LENrefiが入力する。
次に、kfbマップ261を用いて、√(θx^2+θy^2)に対応する値fkbを求め、これを乗算器271により、LENrefiに乗算する。
ここで、kfbマップは、加速度センサの出力に基づいて、車両が移動中で加速度がある場合には、係数kfbが0.5となり、停止中は、1となるように、設定されている、但し、一定の操作が行われた乗降モードの時には、0.7に設定し、通常時よりも係数を小さくする。これは、ドライバ19の乗降時に、姿勢安定化制御による車両の移動や動きを抑えるためである。
【0133】
次に、kfb2マップ262を用いて、θxと車両モードに対応する係数fkb2を求め、これを乗算器272により、LENrefiに乗算する。
ここで、kfb2マップ262は、例えば、kfbマップ261に置換して配置される。加速度センサの出力に基づいて、車両が移動中で加速度がある場合には、係数kfbが0.5となり、停止中は、1となるように、設定されている、但し、一定の操作が行われた乗降モードの時には、0.7に設定し、通常時よりも係数を小さくする。これは、ドライバ19の乗降時に、姿勢安定化制御による車両の移動や動きを抑えるためである。
【0134】
さらに、可変フィルタ263を用いて、√(θx^2+θy^2)に対応する値kθ[ms]を乗算する。
【0135】
続いて、制御補正マップ264を用いて、不感帯処理を行う。即ち、入力されたLENrefiが基準値kfb0より小さく、−kfb0より大きい場合いは、これを無視するように処理する。一方、入力値がkfb0以上又は−kfb0以下の場合には、対応する値又は一定の係数を乗算した値を出力する。
【0136】
次に、修正されたLENrefiに路面傾斜角に応じてゲインを乗算機273により乗算する。このゲインは、上述したkbマップと同様のものでよい。あるいは、ゲインは固定値でもよい。
【0137】
次に、LENrefiの値が負の場合には、例えば、0.5〜1のゲインを乗算機274により乗算して補正する。さらに、荷重センサにより、荷重を測定し、荷重に応じてこのゲインを補正してもよい。
【0138】
さらに、ピッチとロールの大きさに応じた上限値を設定する。この例では、ピッチの絶対値|pitch|とロールの絶対値|roll|の大きい方の値maxに応じて、小さくなるスルーレートが設定されている。
このよう処理を行って、最終的なリーンの制御量を出力する。
【0139】
次に、求めたリーン量(mm)を、路面状況に応じて、補正する処理を行う。この補正処理について、図30を参照して説明する。
悪路走行、段差乗り上げ時などでは、位置制御のゲインを下げ、トルク制御のゲインをあげて乗員の乗り心地を良くする処理を行う。
【0140】
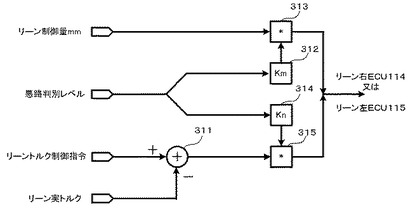
まず、リーン右とリーン左のそれぞれに、図30に示す補正機能が用意される。
この制御機能は、図30に示すように、リーン制御量と、リーントルク制御指令、リーン実トルク、悪路判定レベルが入力され、加算機311、Km変換器312、乗算機313、Kn変換器314、乗算機315を備える。
【0141】
リーン制御量は、前段までの演算処理により求められたリーン制御量LENref[mm]である。
【0142】
リーントルク制御指令は、リーン右制御モータ134又はリーン左制御モータ135が出力すべきトルクの指令値であり、コントローラ103が、加速度、荷重、姿勢などに応じて、予め定められた演算式に従って、リーン制御が可能な程度の値に設定する。
【0143】
リーン実トルクは、トルクセンサにより検出されたリーン右制御モータ134又はリーン左制御モータ135の出力トルクの値である。
【0144】
悪路判定レベルは、路面状況を示す指標である。例えば、センサ群102に含まれている加速度センサの出力の変動をモニタし、直近の所定期間の変動回数[回数/秒]や、センサ群102に含まれている荷重センサの測定値の揺れ[測定荷重の変化率]により表される。
【0145】
加算機311は、リーントルク制御指令とリーン実トルクとの差分を求める。
【0146】
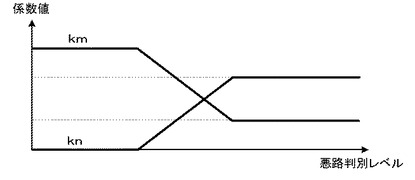
Km変換器312は、図31に示す変換マップに従って、悪路判定レベルに対応する係数値(ゲイン)Kmを求める。
【0147】
乗算機313は、Km変換器312により求められた係数値(ゲイン)Kmをリーン制御量mmに乗算する。図31から明らかなように、係数値Kmは、悪路判定レベルが大きくなるに従って、小さくなる。従って、乗算機313の出力は、路面状況が悪く成るに従って、小さくなる。即ち、路面状況が悪く成るに従って姿勢制御におけるリーンのゲインが小さくなる。
【0148】
Kn変換器314は、図31に示す変換マップに従って、悪路判定レベルに対応する係数値(ゲイン)Knを求める。
【0149】
乗算機315は、変換器315により求められた係数値(ゲイン)Knをリーン制御量mmに乗算する。図31から明らかなように、係数値Knは、悪路判定レベルが大きくなるに従って、大きくなる。従って、乗算機315の出力は、路面状況が悪くなるに従って、大きくなる。即ち、路面状況が悪く成るに従って姿勢制御におけるリーンのトルク制御のゲインが大きくなる。
【0150】
乗算機313、315の出力は、対応するリーン右ECU114とリーン左ECU115とに出力される。
【0151】
リーン右ECU114とリーン左ECU115とは、それぞれ、リーン右制御モータ134とリーン左制御モータ135とを駆動する。
【0152】
次に、出力部223は、得られた制御量に基づいて、操作量を求め、対応する各ECU111〜119に供給する。例えば、出力部223は、リーン制御では、左右のリーンの量がmmで指示されるが、これを対応する駆動モータの回転角に変換する。
【0153】
各ECU111〜119は、Hブリッジ回路121〜129を介して、指示された各操作量だけモータ131〜139を駆動する。
これにより、転倒などが起こらず、安定して車両10の運行が可能となる。
【0154】
以上説明したように、この実施形態によれば、
目標値に従って動作したときの車両10の安定余裕度(目標安定余裕度)を求めて、この安定余裕度が増加するように、補正値を求め、さらに、車両10の実際の状況による車両の安定余裕度(実安定余裕度)を求めて、この安定余裕度が増加するように、補正値を求め、これらの補正値により、制御量を補正する。このため、車両10が不安定になりにくく、転倒が起こりにくい。また、リアルタイムの状況に対応して制御が可能となる。
【0155】
また、悪路状況に従って、悪路である程、リーン制御の位置制御のゲインが小さくなり、リーントルク制御のゲインが大きくなる。このため、乗員の乗り心地が良くなる。
【0156】
なお、この発明は、上記実施形態に限定されず、種々の変形及び応用が可能である。
【0157】
悪路状況に従ってリーン位置制御のゲインとリーントルク制御のゲインとを相補的に変化させる他の例として、例えば、車両10が段差に乗り上げた際に、リーン位置制御のゲインとリーントルク制御のゲインとを相補的に変化させるようにしてもよい。
【0158】
この場合、悪路状態にある、即ち、車両10が段差に乗り上げたことは、例えば、路面の傾斜θxが正でかつ所定の判定レベルKdansaを超えていること(θx>Kdansa>0)、かつ、荷重センサの測定値の変化率>基準値となったことにより判定可能である。荷重センサの変化率の基準値は、例えば、直近0.3秒間に30kg(15kg〜50kg)の変化があったこと等である。
【0159】
この場合、コントローラ103は、例えば、図32に示すように、乗り上げ検出後、所定時間(例えば、1秒間)、係数(ゲイン)Knを通常値Knnormalの0から正の値、例えば、0.8に変化させ、係数(ゲイン)Kmを、通常値Kmnormalから小さな値に変化させる。この状態を一定時間(例えば、1秒間)維持し、続いて、元の値まで直線的に変化させて、1.5秒後にKn=Knnormal=0,Km=Kmnormalに戻す。
【0160】
この乗り上げ処理は、悪路判定に基づくゲインの制御よりも優先度が高く設定される。
このような処理を行うことにより、乗り上げによる、乗り心地が良くない状態を改善することが可能となる。
【0161】
なお、上記実施形態においては、指令に基づく姿勢制御と実値に基づく姿勢制御を統合して姿勢制御を行う制御システム100と制御システム100を備える3輪型の車両10に本願発明を適用した例を示した。この発明は上記実施形態に限定されず、図33に示すように、任意の構成の姿勢制御システムに広く適用可能である。
【0162】
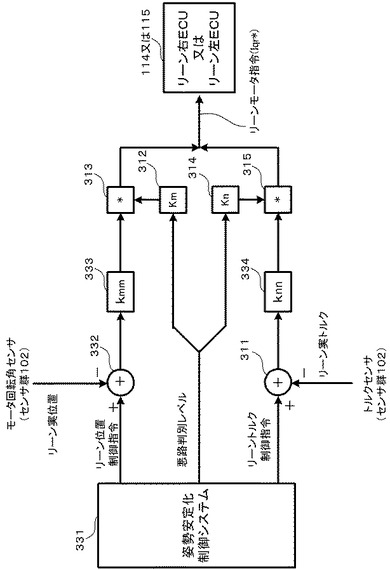
図33の例では、姿勢安定化制御システム331からは、リーン位置制御指令とリーントルク制御指令が補正システムに供給される。リーン位置制御指令は、リーン右制御モータ134又はリーン左制御モータ135の回転量[deg]を指示し、一方、リーン実位置は、レゾルバ等の回転角検出器で検出されたリーン右制御モータ134又はリーン左制御モータ135の実際の回転角を表す。
【0163】
加算機332は、姿勢安定化制御システム331から供給されるリーン位置制御指令[deg]とセンサ群102に含まれているモータ回転角センサにより検出されたリーン実位置[deg]との差をリーンの位置制御量[deg]として求める。
【0164】
乗算機333は、加算機332で求めた位置制御量[deg]に任意のゲインKmmを乗算する。
【0165】
乗算機313は、乗算機333の出力に、係数(ゲイン)Kmを乗算する。
【0166】
また、加算機311は、姿勢安定化制御システム331から供給されるリーントルク制御指令[N・m]とセンサ群102に含まれているトルクセンサにより検出されたリーン実トルク[N・deg]との差をリーンのトルク制御量[N・m]として求める。
【0167】
乗算機334は、加算機311で求めたトルク制御量[N・m]に任意のゲインKnnを乗算する。
【0168】
乗算機315は、乗算機334の出力に、係数(ゲイン)Knを乗算する。
【0169】
係数KmとKnとは、図31に例示したように、姿勢安定化制御システム331によって判別された悪路判別レベルが高くなるに従って、即ち、走行路が悪路面に成るに従って、それぞれ、大きくなり、あるいは、小さくなる係数である。
【0170】
乗算機313と315の出力の和が、対応するリーン右ECU114又はリーン左ECU115に出力される。
【0171】
車両の乗り上げについても、同様に、リーン位置とリーントルクが制御される。
【0172】
また、車輪の片輪あるいは両輪が浮いた場合などにも、リーン位置とリーントルクとの配分を制御し、乗り心地をよくすることが望ましい。このような制御を行う場合には、各車輪にかかる荷重の偏差によるリーン位置制御とリーントルク制御が有効である。
【0173】
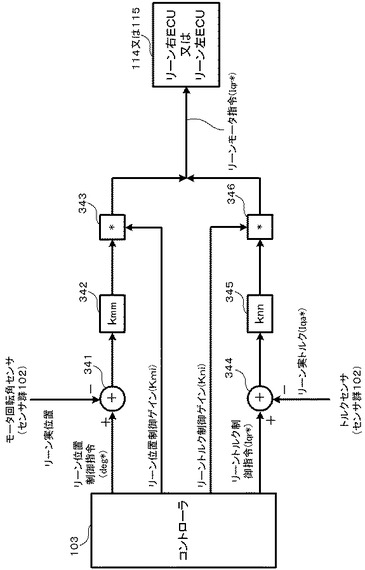
このための回路構成を図34に示す。なお、図34の回路構成は、右リーンと左リーン用にそれぞれ用意される。
図34の例では、コントローラ103からは、リーン位置制御指令とリーントルク制御指令が補正システムに供給される。リーン位置制御指令は、リーン右制御モータ134又はリーン左制御モータ135の回転量[deg]を指示し、一方、リーン実位置は、レゾルバ等の回転角検出器で検出されたリーン右制御モータ134又はリーン左制御モータ135の実際の回転角を表す。
【0174】
加算機341は、リーン位置制御指令deg*[deg]とリーン実位置[deg]との差をリーンの位置制御量[deg]として求める。
【0175】
乗算機342は、加算機341で求めた位置制御量[deg]に任意のゲインKmmを乗算する。ゲインKmmは、例えば、1でもよい。
【0176】
乗算機343は、乗算機342の出力に、コントローラ103から供給される係数(ゲイン)Kmを乗算する。
【0177】
また、加算機344は、リーントルク制御指令Iqr*[N・m]とリーン実トルク[N・m]との差をリーンのトルク制御量[N・m]として求める。
【0178】
乗算機345は、加算機344で求めたトルク制御量[N・m]に任意のゲインKnnを乗算する。ゲインKnnは、例えば、1でもよい。
【0179】
乗算機346は、乗算機345の出力に、コントローラ103から供給される係数(ゲイン)Knを乗算する。
【0180】
乗算機343と346の出力の和が、対応するリーン右ECU114又はリーン左ECU115に出力される。
【0181】
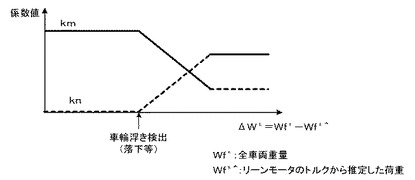
係数KmとKnとは、図35に例示したように、コントローラ103により生成される指数ΔW*の変化に対して、相補的に変化する。
【0182】
ここで、指数ΔW*は、前輪にかかる荷重の目標値Wf*と、リーンモータのトルクから推定した荷重Wf*^との差分、すなわち、目標荷重と実荷重との偏差に相当する。例えば、リーン右に注目すると、指数ΔW*は、前右輪12にかかる荷重の目標値Wfr*と、リーン右制御モータ134のトルクから推定した荷重Wfr*^との差分、すなわち、目標荷重と実荷重との偏差に相当する。同様に、リーン左に注目すると、指数ΔW*は、前左輪13にかかる荷重の目標値ΔWfL*と、リーン左制御モータ135のトルクから推定した荷重WfL*^との差分、すなわち、目標荷重と実荷重との偏差に相当する。
【0183】
なお、目標値Wfr*と目標値WfL*とは、例えば、次のようにして求めることができる。
Tdr=(Td/2)・cosθy+(h・tanθy)・cosθy
TdL=(Td/2)・cosθy−(h・tanθy)・cosθy
Wfr*=Wfm・TdLm/Tdm+Wfm・(Gx^・cosθy/g)・(hm/Tdm)
WfL*=Wfm・Tdrm/Tdm−Wfm・(Gx^・cosθy/g)・(hm/Tdm)
【0184】
このような構成とすることにより、片車輪あるいは両車輪が浮いた場合などに、車輪に係る荷重の偏差ΔW*が大きくなり、係数Knの比重が大きくなって、トルク制御のゲインが大きくなり、乗り心地が維持される。
【0185】
なお、図35の横軸を車輪のトルクの変動回数/秒とすることにより、上述の悪路状況に対応する位置制御とトルク制御の連続的に補正にも同様のシステム構成を採用できる。
また、図34のリーン位置とリーントルクとの配分を制御回路に関しても、コントローラ103に限定されず、任意の構成の姿勢安定化制御システムに適用可能である。
【0186】
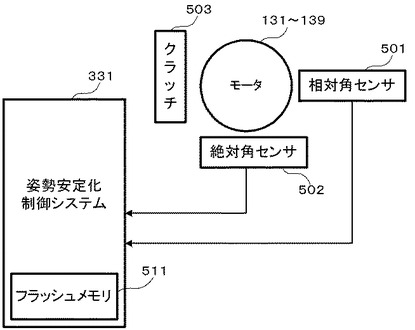
上述の姿勢制御を適切に行うためには、モータ131〜139の回転角の検出が必要である。このため、各モータ131〜139には、図36に示すように、相対角センサ501と絶対角センサ502とが配置されている。相対角センサ501は、適宜設定された基準点からの回転角を測定する。一方、絶対角センサ502は、所定の固定の基準点からの回転角を測定する。
【0187】
これらの回転角センサ501,502は、動作中は、例えば、相対角センサ501の測定角の変化量と絶対角センサ502の測定角の変化量とを比較し、変化量が一致するか否かを判別することにより、各回転角センサ501,502が正常であるか否かを判別することができる。
【0188】
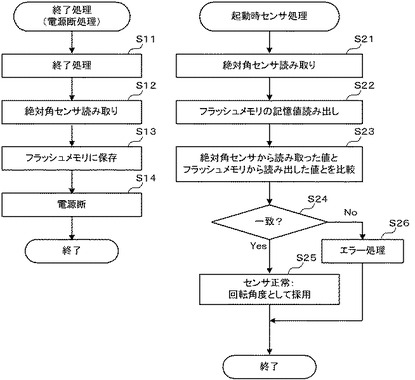
しかし、電源投入時などに、絶対角センサ502が正常であるか否か、さらに、その時点の測定角が正しい値であるか否かを判別することができない。このような問題を解決するため、本実施形態においては、コントローラ103内に書き換え可能な不揮発性メモリ、例えば、フラッシュメモリ511を配置する。コントローラ103は、電源切断時(イグニッションオフ時)には、図37(a)に示すように、所定の終了処理(ステップS11)実行後、絶対角センサ502の値を読み取り(ステップS12)、フラッシュメモリ511に記録し(ステップS13)、電源をオフする(ステップS14)。
【0189】
一方、電源投入時(イグニッションオン時)には、初期化処理を行う一方で、絶対角センサ502の測定値を読み取る(ステップS21)。続いて、フラッシュメモリ511に記憶されていた値を読み出し(ステップS22)、絶対角センサ502から今回読み出した値とフラッシュメモリ511から読み出した値とを比較する(ステップS23)。
【0190】
2つの値が一致すれば(ステップS24;Yes)、絶対角センサ502が正常であると判別し、絶対角センサ502の出力データをモータの回転の絶対角として採用する(ステップS25)。一方、ステップS24で、2つの値が一致しないと判別された場合(ステップS24;No)、所定のエラー処理を行う(ステップS26)。
【0191】
このようにして、絶対角センサの正常・異常を電源投入時に判別することが可能となる。
【0192】
また、例えば、上記実施形態における構成、動作、変数、演算式等が一例であり、これらに限定されるものではない。例えば、図31に示した係数(ゲイン)Kn、Kmを特定するためのマップや、図32に示したタイムテーブルは、適宜変更可能である。
【符号の説明】
【0193】
10 車両
11 ボディ
12 前右輪
13 前左輪
14 後輪
19 ドライバ
21 シート
23 アームレスト
24 アームレスト
25 グリップ操作装置
26 グリップ操作装置
31 前輪右支持機構
32 前輪左支持機構
33 後輪支持機構
34 ステアリング部
100 制御システム
101 操作部
102 センサ群
103 コントローラ
105 Gセンサ
106 レートセンサ
107 ホイールベースセンサ
108 速度センサ
109 リーンセンサ
111 前輪右駆動ECU
112 前輪左駆動ECU
113 ステアリングECU
114 リーン右ECU
115 リーン左ECU
116 姿勢制御ECU
117 ブレーキ前右制御ECU
118 ブレーキ前左制御ECU
119 ブレーキ後制御ECU
121〜129Hブリッジ回路(3相ブリッジ回路)
131〜139 モータ
201 プロセッサ
202 不揮発性メモリ
203 RAM
204 入出力部
211 入力部
212 前後運動目標値演算部
213 左右運動目標値演算部
214 重心位置換算演算部
215 傾斜角推定演算部
216 前後制御量演算部
217 左右制御量演算部
218 目標安定余裕度演算部
219 実安定余裕度演算部
220 荷重制御補正量演算部
221 加算器
222 調停処理部
223 出力部
401 指令状態演算部
402 θIi*演算部
403 min(θi*)・||fri*||演算部
404 目標安定余裕補正量演算部
411 実状態演算部
412 θIi演算部
413 min(θi)・||fri||演算部
414 実安定余裕補正量演算部
【技術分野】
【0001】
この発明は、車両の姿勢安定化制御装置と該姿勢安定化制御装置を備えた車両に関する。
【背景技術】
【0002】
走行車両の安定性を高めるため、様々な提案がなされている。
例えば、特許文献1には、ボディの前部に取り付けられた転舵車輪とボディの後部に取り付けられた駆動車輪とを備えた1人用の乗り物において、車両の安定性を保つため、ボディを水平に維持する技術が開示されている。
また、特許文献2には、車両の安定性を向上するため、ホイールベースを可変する技術が開示されている。
さらに、特許文献3には、車両の旋回性を高めるために、旋回時に乗り物の重心を旋回内輪に移動させ、旋回安定性と乗り心地を向上させる技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−82044号公報
【特許文献2】特開2005−112300号公報
【特許文献3】特開2007−099218号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
通常の車両では、悪路、段差乗り上げなど、乗り心地が良くない状態は、サスペンションにより改善されている。
しかしながら、特許文献1〜3に開示されている車両は、十分なパワーのサスペンションを配置することが困難であり、悪路走行時等での、乗り心地の改善が望まれている。
【0005】
この発明は、こうした実情に鑑みてなされたものであり、車両の乗り心地を改善することを目的とする。
また、この発明は、車両の悪路走行時等の乗り心地を、サスペンションによらず、改善することを他の目的とする。
【課題を解決するための手段】
【0006】
こうした目的を達成するため、本発明の第1の観点に係る姿勢安定化制御装置は、
ボディと、前輪と、後輪とを備える車両の姿勢を制御する姿勢制御装置であって、
車両の運動の目標値を設定する目標値設定手段と、
設定された目標値に基づいて、車両の運動及び姿勢を制御するアクチュエータの制御量を制御するための制御信号を生成する制御量演算手段と、
車両の運転状態を検出する運転状態検出手段と、
前記運転状態検出手段により検出された車両の運転状態と前記目標値設定手段により設定された目標値とに基づいて、車両を安定化させるための補正量を演算する補正量演算手段と、
車両の路面状況を検出する路面状況検出手段と、
前記路面状況検出手段で検出された路面状況に基づいて、前記補正量を修正する補正量修正手段と、
前記制御量演算手段で生成された制御量を、前記補正量修正手段で修正された補正量を用いて補正する補正手段と、
前記補正手段により補正された制御量を用いて、アクチュエータを制御する制御手段と、
を備えることを特徴とする。
【0007】
例えば、前記補正量修正手段は、前記路面状況検出手段が路面が所定の悪路であることを検出したとき、又は、車両が段差に乗り上げたことを検出したときに、前記制御手段による姿勢制御のゲインを小さくするように、前記補正量を修正する。
【0008】
例えば、前記補正量修正手段は、前記路面状況検出手段が路面が所定の悪路であることを検出したときに、前記アクチュエータの位置制御量を小さく、トルクを大きくするように、前記補正量を修正する。
【0009】
例えば、前記補正量修正手段は、前記路面状況検出手段が、車両が段差に乗り上げたことを検出したときに、一定時間、前記アクチュエータの位置制御量を小さく、トルクを大きくするように、前記補正量を修正し、その後、元の状態に復帰させる。
【0010】
例えば、前記制御手段は、アクチュエータにより前記ボディを鉛直方向に上下する手段を備え、前記補正量修正手段は、前記路面状況検出手段が路面が所定の悪路であることを検出したとき、又は、車両が段差に乗り上げたことを検出したときに、前記制御手段によるボディの上下方向への移動の移動量を小さくし、アクチュエータのトルクを大きくするように、前記補正量を修正する。
【0011】
例えば、前記前輪は、右前輪と左前輪を含み、前記アクチュエータは、右前輪を基準とするボディの高さ、左前輪を基準とするボディの高さ、前輪と後輪との間隔を制御するアクチュエータを含んでもよい。
【0012】
この発明の第2の観点に係る車両は、上記構成の姿勢安定化制御装置を備えることを特徴とする。
【0013】
また、この発明の第3の観点に係るコンピュータプログラムは、
コンピュータを、
車両の運動の目標値を設定する目標値設定手段と、
設定された目標値に基づいて、車両の運動及び姿勢を制御するアクチュエータの制御量を制御するための制御信号を生成する制御量演算手段と、
車両の運転状態を検出する運転状態検出手段と、
前記運転状態検出手段により検出された車両の運転状態と前記目標値設定手段により設定された目標値とに基づいて、車両を安定化させるための補正量を演算する補正量演算手段と、
車両の路面状況を検出する路面状況検出手段と、
前記路面状況検出手段で検出された路面状況に基づいて、前記補正量を修正する補正量修正手段と、
前記制御量演算手段で生成された制御量を、前記補正量修正手段で修正された補正量を用いて補正する補正手段と、
前記補正手段により補正された制御量を用いて、アクチュエータを制御する制御手段と、
として機能させることを特徴とする。
【発明の効果】
【0014】
本発明によれば、検出された路面状態によって補正量を制御するので、悪路や段差乗り上げなどの路面状況に応じた車両の適正な運転が可能となり、乗り心地を改善することができる。
【図面の簡単な説明】
【0015】
【図1】(a)〜(c)は、この発明の一実施形態に係る車両を説明するための図である。
【図2】(a)〜(c)は、車両のリーン制御を説明する図である。
【図3】車両の制御システムの構成図である。
【図4】コントローラの構成図である。
【図5】コントローラの機能構成図である。
【図6】目標安定余裕度演算部と実安定余裕度演算部の機能構成を示すブロック図である。
【図7】Gセンサから車両の重心に向かうベクトルと、姿勢制御量との関係を示す図である。
【図8】(a)、(b)は、Gセンサの傾きを説明するための図である。
【図9】(a)〜(e)は、マップの例を示す図である。
【図10】路面上の車両に加わる力のモデルである。
【図11】転倒安定余裕度を説明するための図である。
【図12】θsマップの例を示す図である。
【図13】(a)〜(c)は、θsマップの例を示す図である。
【図14】路面に設置された車両の安定度を求める手順を説明するための図である。
【図15】L11〜L32を求めるθsマップの例を示す図である。
【図16】θ31〜θ33を求めるマップの例を示す図である。
【図17】L31,L32を求めるマップの例を示す図である。
【図18】車両の転倒する方向を説明する図である。
【図19】補正量を説明するための図である。
【図20】補正量を格納したテーブルの例を示す図である。
【図21】制御面を説明する図である。
【図22】(a)、(b)は、加速度に応じて、基準値π/2を変化させるマップを示す図である。
【図23】係数klcのマップである。
【図24】(a)、(b)は、係数K10とK11を説明するためのマップの例を示す図である。
【図25】(a)、(b)は、係数K0とK1を説明するためのマップの例を示す図である。
【図26】tan(LENradref3)/2と−tan(LENradref3)/2とを修正・補正する手法を示す図である。
【図27】(a)〜(c)は、リーンの制御量を重心の動きを説明するための図である。
【図28】調停処理部の構成を示す図である。
【図29】調停処理の例を示す図である。
【図30】路面状況に応じてリーンの制御量とリーントルクとを制御する位置・トルク振り分け制御部の構成例を説明するためのブロック図である。
【図31】路面の状況と図30に示す係数KmとKnとの関係を示すマップである。
【図32】車両の乗り上げ時、リーン位置制御及びリーントルク制御を説明するための図である。
【図33】位置・トルク振り分け制御部の他の構成例を示す図である。
【図34】車輪が浮いた時の、リーン位置制御及びリーントルク制御を説明するための図である。
【図35】荷重の偏差と図34に示す係数KmとKnとの関係を示すマップである。
【図36】モータの回転角検出回路の構成例を示す図である。
【図37】(a)は、電源断時にモータの回転角を検出して記憶する動作を説明するためのフローチャート、(b)は、電源投入時に絶対角センサをチェックする動作を説明するためのフローチャートである。
【発明を実施するための形態】
【0016】
以下、この発明の実施の形態に係るモータ駆動装置を備えた車両について説明する。
まず、本実施形態に係る車両10について説明する。
本実施形態に係る車両10は、図1(a)に正面、図1(b)、(c)に側面で示すように、一人乗り用であり、ボディ11と、前右輪12と、前左輪13と、後輪14とを備える三輪車である。
【0017】
ボディ11には、乗車部としてのシート21が1つ設けられている。シートの中間部の左右両側には、アームレスト23と24が配置されている。アームレスト23と24には、グリップ操作装置25、26が設けられている。
【0018】
ボディ11は、その右側面が前右輪12上に配置された前輪右支持機構31で支持され、その左側面が前左輪13上に配置された前輪左支持機構32で支持されている。また、ボディ11の後部中央は、後輪14に接続された後輪支持機構33により支持されている。
【0019】
前輪右支持機構31と前輪左支持機構32とは、図2(a)〜(c)に模式的に示すように、独立して上下方向に制御可能に構成されている。これにより、ボディ11は、接地面に対して左右(Y軸方向)及び前後(X軸方向)に揺動する。
【0020】
この明細書において、前輪12,13に対して前輪右支持機構31と前輪左支持機構32とを制御してボディ11を上下する制御をリーン制御と呼ぶ。
【0021】
一方、後輪14は、図1(b)、(c)に示すように、後輪支持機構33を駆動することにより、前後に移動可能である。
【0022】
図1(b)に示すように後輪14が前進すると、ボディ11が起きて、第1モード(人モード)となり、ドライバ19は、シート21に腰を掛けた状態となる。第1モードでは、重心が高くなり、ホイールベース(姿勢制御量:前輪12,13と後輪14との距離)θs[mm]が最小(min)となる。
【0023】
後輪14が後退すると、図1(c)に示すように、ボディ11が後ろに倒れて、第2モード(車両モード)となり、ドライバ19は、シート21の背もたれにもたれた状態となる。また、ホイールベースθs[mm]が最大(max)となり、車両10の重心が、第1モードよりも、後方かつ下側に移動する。
【0024】
後輪支持機構33の先端部(ステアリング部)34は、その長軸を中心に回転可能であり、これにより、後輪14の向きが変化し、車両10が操舵される。
【0025】
次に、このように構成された車両10の制御システム100について図3を参照して説明する。
【0026】
図示するように、この制御システム100は、操作部101と、センサ群102と、コントローラ103と、前輪右駆動ECU111と、前輪左駆動ECU112と、ステアリングECU113と、リーン右ECU114と、リーン左ECU115と、姿勢制御ECU116と、ブレーキ前右制御ECU117と、ブレーキ前左制御ECU118と、ブレーキ後制御ECU119と、Hブリッジ回路(3相ブリッジ回路)121〜129と、前輪右駆動モータ131と、前輪左駆動モータ132と、ステアリングモータ133と、リーン右制御モータ134と、リーン左制御モータ135と、姿勢制御モータ136と、ブレーキ前右制御モータ137と、ブレーキ前左制御モータ138と、ブレーキ後制御モータ139とを備える。
【0027】
操作部101は、グリップ操作装置25、26を含み、走行・停止、加速・減速、姿勢、進行方向等のドライバからの指示を入力し、コントローラ103に指示信号を出力する。
【0028】
センサ群102は、モータ131〜139に配置された各回転角センサ(レゾルバ)及び電流センサを含む。
【0029】
コントローラ103は、図4に示すように、プロセッサ201と、不揮発性メモリ202と、RAM203と、入出力部204とから構成される。
【0030】
プロセッサ201は、不揮発性メモリ202に格納されたプログラムを実行し、モータ131〜139を駆動及び制御するための動作を行う。また、プロセッサ201は、これらの制御を行うため、操作部101への入力及びセンサ群102を構成する各センサの出力を取り込む。
【0031】
不揮発性メモリ202は、ROM(Read Only Memory)、フラッシュメモリ、ハードディスク等から構成され、プロセッサ201が実行する制御プログラムや固定データを記憶する。
【0032】
RAM (Random Access Memory)203は、プロセッサ201のワークメモリとして機能する。
【0033】
入出力部204は、操作部101の操作入力及びセンサ群102を構成するセンサのディジタル出力を取り込んでコントローラ103に供給し、一方、コントローラ103の制御用の出力データを各ECU111〜119に供給する。
【0034】
図3に示す前輪右駆動ECU111は、操作部101からの指示及びセンサ群102を構成する各センサの出力から、Hブリッジ回路121をPWM制御して、前輪右駆動モータ131に供給する電力を制御して、前右輪12の回転を制御する。これにより、車両10の前進・後退とその速度が制御される。
【0035】
前輪左駆動ECU112は、操作部101からの指示及びセンサ群102を構成する各センサの出力から、Hブリッジ回路122をPWM制御して、前輪左駆動モータ132に供給する電力を制御して、前左輪13の回転を制御する。これにより、車両10の前進・後退とその速度が制御される。
【0036】
ステアリングECU113は、操作部101からの指示及びセンサ群102を構成する各センサの出力から、Hブリッジ回路123をPWM制御して、ステアリングモータ133に供給する電力を制御して、ステアリング部34の回転を制御する。これにより、車両10の進行方向が制御される。
【0037】
リーン右ECU114は、操作部101からの指示及びセンサ群102を構成する各センサの出力から、Hブリッジ回路124をPWM制御して、リーン右制御モータ134に供給する電力を制御して、リーン右制御モータ134の回転を制御し、前輪右支持機構31の鉛直方向の位置を制御する。これにより、車両10の接地面に対する左右方向の傾きが制御される。
【0038】
リーン左ECU115は、操作部101からの指示及びセンサ群102を構成する各センサの出力から、Hブリッジ回路125をPWM制御して、リーン左制御モータ135に供給する電力を制御して、リーン左制御モータ135の回転を制御し、前輪左支持機構32の鉛直方向の位置を制御する。これにより、車両10の接地面に対する左右方向の傾きが制御される。
【0039】
姿勢制御ECU116は、操作部101からの指示及びセンサ群102を構成する各センサの出力から、Hブリッジ回路126をPWM制御して、姿勢制御モータ136に供給する電力を制御して、その回転を制御する。これにより、後輪支持機構33が回転駆動され、後輪14が図1(b)、(c)に示すように、前方又は後方に駆動され、これにより、車両10は、第1モードと第2モードとに切り替えられる。
【0040】
ブレーキ前右制御ECU117は、操作部101からの指示及びセンサ群102を構成する各センサの出力から、Hブリッジ回路127をPWM制御して、ブレーキ前右制御モータ137に供給する電力を制御して、その回転を制御し、ブレーキパッド(図示せず)を前右輪12に押し当てて、前右輪12にブレーキをかける。
【0041】
ブレーキ前左制御ECU118は、操作部101からの指示及びセンサ群102を構成する各センサの出力から、Hブリッジ回路128をPWM制御して、ブレーキ前左制御モータ138に供給する電力を制御して、その回転を制御し、ブレーキパッド(図示せず)を前左輪13に押し当てて、前左輪13にブレーキをかける。
【0042】
ブレーキ後制御ECU119は、操作部101からの指示及びセンサ群102を構成する各センサの出力から、Hブリッジ回路129をPWM制御して、ブレーキ後制御モータ139に供給する電力を制御して、その回転を制御し、ブレーキパッド(図示せず)を後輪14に押し当てて、後輪14にブレーキをかける。
【0043】
なお、各ECU111〜119の基本構成は、図4に示すコントローラ103の基本構成と同一である。但し、その機能が特化されている。また、対応するHブリッジ回路121〜129を駆動するために、PWM回路を備えている。
【0044】
Hブリッジ回路121〜129は、ECU111〜119の制御に従って、対応するモータ131〜139に、U,V,Wに三相の電流を供給し、その回転を制御する。
【0045】
次に、制御システム100による車両10の姿勢を安定化して転倒を予防する姿勢安定制御について説明する。
【0046】
操作部101は、前述のグリップ操作装置25,26を含み、走行・停止、加速・減速、姿勢、進行方向等のドライバ19からの指示を入力し、コントローラ103に指示信号を出力する。
【0047】
センサ群102は、G(加速度)センサ105と、レートセンサ106と、ホイールベースセンサ107と、速度センサ108、リーンセンサ109等を含み、各センサの検出信号をコントローラ103に供給する。
【0048】
Gセンサ105は、X軸方向(車両10の進行方向)の加速度を測定するX軸方向G(加速度)センサ、Y軸方向(車両10の左右方向)の加速度を測定するY軸方向Gセンサ、Z軸方向(車両10の鉛直方向)の加速度を測定するZ軸方向Gセンサ、を備える。
【0049】
Gセンサ105は、車両10の重心位置から物理的に離れた位置に設置されており、ホイールベースθsの変化により、その位置と車両10の重心までの距離は変化する。
【0050】
レートセンサ106は、ジャイロなどから構成され、Z軸方向の揺れヨー(yawsen)と、Y軸方向の揺れロール(rollsen)、X軸方向の揺れピッチ(pitchsen)を検出し、検出信号を出力する。レートセンサ106も、車両10の重心位置から物理的に離れた位置に設置されており、ホイールベースθsの変化により、その位置と車両10の重心までの距離は変化する。
【0051】
ホイールベースセンサ107は、図1(b)、(c)に示すホイールベースθs[mm]を求める。
速度センサ108は、車軸の回転速度等から、車両10の速度Vを求める。
リーンセンサ109は、前輪右支持機構31及び前輪左支持機構32による高さ方向の制御量(リーン制御量)を測定する。
【0052】
コントローラ103を構成するプロセッサ201は、不揮発性メモリ202に格納されたプログラムとの協働により、機能的に、図5に示すように、入力部211と、前後運動目標値演算部212、左右運動目標値演算部213と、重心位置換算演算部214と、傾斜角推定演算部215と、前後制御量演算部216と、左右制御量演算部217と、目標安定余裕度演算部218と、実安定余裕度演算部219と、荷重制御補正量演算部220と、加算器221と、調停処理部222と、出力部223とを備える。
【0053】
入力部211は、操作部101、センサ群102等からの信号を入力し、ノイズを除去するフィルタ処理、各種変換処理、単位を変換する単位変換処理等を行う。
【0054】
前後運動目標値演算部212は、操作部101からの入力及びセンサ群102からの入力等に基づいて、車両10の速度の前後方向(X軸方向)の目標値Vx*と加速度の目標値Gx*を求めて出力する。
【0055】
左右運動目標値演算部213は、操作部101からの入力及びセンサ群102からの入力等に基づいて、車両10の左右方向(Y軸方向)の加速度の目標値Gy*を求めて出力する。
【0056】
重心位置換算演算部214は、車両10の重心位置からずれた位置に設置されているGセンサ105の出力から、重心位置CGでの前後方向の加速度Gx,左右方向の加速度Gy,上下方向の加速度Gzを求めて出力する。
具体的には、重心位置換算演算部214は、加速度センサの測定値Gxsen、Gysen,Gzsenを(1)式に適用して重心位置CGでのX軸方向(車両進行方向)の加速度Gx、Y軸(車両左右方向)方向の加速度Gy,Z軸方向(車両上下方向)の加速度Gzを求める。
【0057】
【数1】
・・・ (1)
【0058】
ここで、
Gxは、Gセンサ105が車両10の重心位置に設置されていた場合に、測定したと予想されるX軸方向の加速度[m/s2]を表す。
Gyは、Gセンサ105が車両10の重心位置に設置されていた場合に、測定したと予想されるY軸方向の加速度[m/s2]を表す。
Gzは、Gセンサ105が車両10の重心位置CGに設置されていた場合に、測定したと予想されるZ軸方向の加速度[m/s2]を表す。
【0059】
Gxsenは、Gセンサ105のX軸方向の加速度の測定値[m/s2]を表す。
Gysenは、Gセンサ105のY軸方向の加速度の測定値[m/s2]を表す。
Gzsenは、Gセンサ105のZ軸方向の加速度の測定値[m/s2]を表す。
【0060】
yawsenは、レートセンサ106が検出したヨー[m/s]を表す。
rollsenは、レートセンサ106が検出したロール[m/s]を表す。
pitchsenは、レートセンサ106が検出したピッチ[m/s]を表す。
【0061】
また、I=(Ix Iy Iz)は、車両10の重心からGセンサ105へのベクトルであり、車両10の姿勢により変化する。車両10の姿勢は、図1(b)、(c)に示すホイールベースθsで表すことができる。そこで、本実施形態では、ベクトルIをホイールベースθsに応じて予め求めて、図7に示すようにマップ化して不揮発性メモリ202に格納し、ホイールベースセンサ107が測定したホイールベースθsを適用して求めるものとする。
【0062】
図5の傾斜角推定演算部215は、車両10が位置している路面の傾きを求める。
路面の傾きを求めるため、傾斜角推定演算部215は、まず、レートセンサ106の出力から、傾斜による影響を補正したロールroll、ピッチpitch、ヨーyawを次式(2)に従って求める。
roll=rollsen・cosθx1+yawsen・sinθx1
pitch=pitchsen・cosθy1+yawsen・sinθy1
yaw=yawsen・cosθx1・cosy1+rollsen・sinθx1+pitchsen・sinθy1
・・・(2)
【0063】
ここで、θx1=θxs+θxL θy1=θyLである。
θxsは、ホイールベースθsのX軸方向成分であり、ホイールベースセンサ107により検出されたホイールベースθsに基づいて、図9(a)に示すマップにより求められる。
θxLは、リーン制御(支持機構31、32によりボディ11が前後方向に傾く)によるθx角であり、図9(b)に示すマップにより求められる。また、θyLは、リーン制御によるθy角であり、図9(c)に示すマップによる定まる。図9(b)、(c)において、θLRは、前輪右支持機構31のリーン制御量[mm]、θLLは前輪左支持機構32のリーン制御量[mm]であり、リーンセンサ109により求められる。
【0064】
次に、図5の傾斜角推定演算部215は、図8(a)、(b)に示すように、車両10の重心位置CGの傾き(傾斜角)θxt、θytを次式により求める。
θxt=[asin((Gx−Gx^−Kα0・|yaw・V|)/1G)]−Kαx・|LENactR−LENactL|
θyt=[asin((Gy−Gy^)/1G)]−sign(θyt)・Kαy・|LeNactR−LENactL|
signは、θytの符号を表す。
θytの符号は、θyt>0ならば+、θyt<0ならば−である。
【0065】
ここで、Gxは、Gセンサ105が測定した重心位置CGでのX軸方向(前後方向)の加速度であり、Gx^は、重力(1G)の影響を除去したX軸方向の加速度を表す。同様に、Gyは、Gセンサ105が測定した重心位置CGでのY軸方向の加速度であり、Gy^は、重力の影響を除去した、Y軸方向の加速度を表す。
従って、
Gx=1G・sinθxt+Gx^ と、
Gy=1G・sinθyt+Gy^
が成立する。
【0066】
また、Kα0,Kαx、Kαyは、それぞれ十分に小さい値であり、これらの係数を含む項は無視可能である。
【0067】
このため、
θxt=asin(Gx−Gx^)/1G
θyt=asin(Gy−Gy^)/1G と近似できる。
【0068】
さらに、
Gx^=d(V)/dt、
dy^=−yaw・V が成立する。
ここで、Vは、車両10の速度であり、速度センサ108により測定され、例えば、前右輪12の速度VfRと前左輪13の速度VfLの平均値で表すことが可能である。
このようにして、傾斜角推定演算部215は、Gセンサ105の出力を重心位置CGに換算した値Gx,Gyと、車速度Vと、レートセンサ106の値から、車両10の重心位置CGの傾き(傾斜角)θxt、θytを求める。
【0069】
次に、傾斜角推定演算部215は、図8に示すX軸、Y軸方向の路面傾斜角θx、θy、即ち車両10が位置している路面の水平に対する傾きを求める。
ここで、次式が成立する。
θxt=θx+(θxs)+θxL+θxgx+θxε+θxv=θxv
θyt=θy+ +θyL+θvgy+θvε+θyv=θyv
【0070】
ここで、θxとθyは、路面傾斜を示し、(θxs)+θxLとθxLとは、車両姿勢を示し、θxgxとθygyは、車両運動を示し、θxεとθyεとは、その他の要素を示し、θxvとθyvとは、車両単独での傾斜分を示す。
θxLは前後(X軸)方向の路面の傾斜角、θyは左右(Y軸)方向の路面の傾斜角である。
θxsは、ホイールベースθsに依存する前後方向の角度であり、図9(a)の特性図で求められる。なお、マップの作成手法によっては、θxLに含めることにより、この項は不要となる。
θxは、前輪に対するボディのZ軸方向の位置(高さ)により定まる値であり、図9(b)の特性図で得られる。すなわち、リーン制御量[mm]の前後方向の傾き角度を示す値であり、前右輪12に対するボディ11の基準位置からの制御量θLRと前左輪13に対するボディ11の基準位置からの制御量θLLとの平均値((θLR+θLL)/2)である。
【0071】
また、θyLは、リーン制御量(mm)に対する横方向の傾き角度を示す値であり、((θLR−θLL)/2)に依存し、図9(c)の特性図で得られる。
【0072】
さらに、θxgxは、Gx,すなわち、車両10のX軸方向の加速度Gxによるθx角であり、重心位置換算演算部214で求めた加速度Gxを図9(d)に示すマップに適用して得られる。
さらに、θygyは、Gy,すなわち、車両10のY軸方向の加速度Gyによるθy角であり、重心位置換算演算部214で求めた加速度Gyを図9(e)に示すマップに適用して得られる。
なお、θxv、θyvは、それぞれ、全傾斜のうち路面の傾斜分を除外した車両10単独での傾斜分である。従って、次式が成立する。
θx=θxt−θxv θy=θyt−θyv
【0073】
傾斜角推定演算部215は、上式に基づいて、車両10が位置する路面の傾斜角θxとθyを求める。
【0074】
前後制御量演算部216は、前後運動目標値演算部212から供給された速度の目標値Vx*と加速度の目標値Gx*に基づいて、指示された加速度と速度とを実現するために、前輪駆動モータ131,132、ブレーキ駆動モータ137〜139の操作量を求める。
【0075】
左右制御量演算部217は、左右運動目標値演算部213から供給された加速度の目標値Gy*に基づいて、ステアリングモータ133、リーン右制御モータ134、リーン左制御モータ135の操作量を求める。
【0076】
通常は、前後制御量演算部216の出力と左右制御量演算部217の出力とに基づいて、モータ131〜139が制御される。
しかし、本実施形態では、車両10の安定性を高めるために、これに補正を加え、車両10の転倒安定余裕をアクティブに大きくする制御を行う。このため、目標安定余裕度演算部218と実安定余裕度演算部219が配置されている。
【0077】
目標安定余裕度演算部218は、目標値のままに車両10が挙動した場合の転倒安定余裕度を求め、安定度を高めるための補正量を求める回路である。目標安定余裕度演算部218は、図6に示すように、指令状態演算部401と、θIi*演算部402と、min(θi*)・||fri*||演算部403と、目標安定余裕補正量演算部404とを備える。
【0078】
指令状態演算部401は、図10に示すように、車両10が傾きθx、θyの路面に立脚していることを前提として、指令に従った動作によって車両10(の重心)に加わる外力fd*と重力fg*を求め、さらに、その合成力であるfrを求める。ただし、ここでは、fg*=1Gとする。
【0079】
図11に示すように、車両10が倒れる場合、その回転軸は、3つの支持脚(車輪12,13,14)を結ぶ3辺のいずれかである、そこで、3辺に符号i(i=1,2,3)を付し、倒れ易い方向(前方)を正として、転倒安定余裕度Sfasmi*(i=1,2、3)を定義する。
なお、図11の各角度、θr、θfR、θfLは、姿勢制御量θsによって変化する。このため、これらの角は、図12に例示するマップにより求めることができる。
【0080】
指令状態演算部401は、各辺について、外力fdi(i=1,2,3)を、次式により求める。
転倒安定余裕度Sfasm1*(i=1)について:
fd1*=m*(Gx*)・cos(θr/2)・cosθx+(Gy*)・sin(θr/2)・cosθy
転倒安定余裕度Sfasm2*(i=2)について:
fd2*=m*(Gx*)*cos(θr/2)*cosθx−(Gy*)*sin(θr/2)*cosθy
転倒安定余裕度Sfasm3*(i=3)について:
fd3*=m・(−Gy*)・cos(θy)
【0081】
なお、mは、車両10の質量、
Gx*は、重心における車両のX軸方向の目標加速度、
Gy*は、重心における車両のY軸方向の目標加速度、
θrは、前右輪12と後輪14を結ぶ線と、前左輪13と後輪14を結ぶ線との成す角、
θx、θyは、路面のX軸方向及びY軸方向の傾斜角である。
【0082】
指令状態演算部401は続いて、θi1*(θ11*〜θ31*)、θi2*(θ12*〜θ32*)、θi3*(θ31*〜θ33*)を求める。
これらの角度は、図10に示すように、ボディを支える3つの車輪12〜14と重心CGとを結ぶラインとの交差角であり、θ11*、θ12*、θ13*は、車輪13と14と重心とを結ぶ3辺が形成する角度であり、θ21*、θ22*、θ23*は、車輪12と14と重心とを結ぶ3辺が形成する角度であり、θ31*、θ32*、θ33*は、車輪12と13と重心とを結ぶ3辺が形成する角度である。
【0083】
前述のように、車両10の重心CGの位置と後輪14の位置は、姿勢制御量θsに対応している。そこで、指令状態演算部401は、角度θiと姿勢制御量θsとの関係を図13(a)〜(c)に示すθsマップにより求める。
【0084】
さらに、指令状態演算部401は外力と重力の合成力fri*を次式により求める。
fri*=√{fdi*2+fgi*2)}
【0085】
θIi*演算部402は、転倒安定余裕度Sfasmi*、即ち、車両10が転倒するまでにどの程度の余裕があるかを示す指標を演算するため、図14に示すように、車輪12〜14と重心CGを結ぶラインと合成力friが成す角度θIi1*とθIi2*を求める。
この角度も、車輪12〜14が形成する三角形の各辺(i=1〜3)について求める。
まず、θi1*〜θi3*を、図13(a)〜(c)に示すθsマップで求める。
また、角度θIi1*とθIi2*とは、車輪と重心点CGとの結ぶ脚の長さLi1,Li2によっても変化する。このため、脚の長さLi1,Li2を図15に示す姿勢制御量θsに対するマップにより求める。
さらに、正面から見たときに、車輪と重心とが形成する三角形の角度は、リーン制御量によっても変化する。そこで、θ3i、L31,L32を、図16と図17とにより求める。
【0086】
最終的に、
θIi*演算部402は、θIi1*、θIi2を次式に従って求める。
θIi0=−θri*+θi2
θIi1*=π/2−θIi0*−θfi*
θIi2=θi1−θIi1*
【0087】
次に、min(θIi*)・||fri*||演算部403は、転倒安定余裕度Sfasmi*をθIi1*,θIi2*,fri*より、次式に従って求める。
Sfasmi*=min(θIi*)・||fri*||
すなわち、転倒安定余裕度Sfasmi*をθIi*のうちの最小のものとfrii*のノルムとを乗算して求める。
【0088】
続いて、目標安定余裕補正量演算部404は、図18に示す複数の方向のうちから、安定余裕度Sfasmi*が最も小さい方向、即ち、最も転倒が起こりやすい方向を求める。
そして、図19に示すように、その方向における重心からの力が、フラットな路面で静止状態で立っている重力方向角(路面に垂直な方向)に一致するように、換言すると、角度friを0に修正するように、各モータ131〜139が動作すべき量に対応する制御量を補正量として求めて設定する。
【0089】
この補正量を求めるため、本実施形態では、図20に示すように、場面毎に補正量を予め設定しておき、適切なものを優先順位を付けて選択することとする。
具体的には、(π/2−θi2)−θIi1*が最大となるSfasmi*を求め、その内容に従って、補正量を求める。
【0090】
例えば、図18に示す2−3線の方向への転倒の可能性が最も大きいとすれば、2−3線の方向の(π/2−θi2)−θIi1*が最大となり、このとき1−3線の方向も同極性の場合には、図20の第3エントリが選択される。
これにより、まず、前右輪12と前左輪13のリーンを下げる補正が設定される。その量は、Sfasm*が大きくなるに従って、小さくなる。また、全ての車輪12〜14にブレーキをかける。ブレーキの程度は、Sfasm*が大きくなるに従って、小さくなる。
【0091】
また、ステアリングの補正は行わない。
以上の処理が実行できない場合には、姿勢制御量(ホイールベース)θsを大きくし、重心を低下させる。以上の処理ができない場合には、車両10の加速度を低下させる。
なお、警報は、Sfasm*が最小値よりも小さければ行う。
【0092】
実安定余裕度演算部219は、車両10の現在の実際の状態に基づいて車両10の安定余裕度を求める回路であり、実状態演算部411と、θIi演算部412と、min(θi)・||fri||演算部413と、実安定余裕補正量演算部414とを備える。
【0093】
実状態演算部411、θIi演算部412、min(θi)・||fri||演算部413、実安定余裕補正量演算部414は、基本的に、指令状態演算部401、θIi*演算部402、min(θi*)・||fri*||演算部403、目標安定余裕補正量演算部404と、構成及び機能が同一である。但し、演算の根拠となるデータが目標値では無く車両の現在の実際の値である点が異なる。
【0094】
具体的には、実状態演算部411は、Sfasm1に関して、
fd1=m・{(Gx1−KG・sinθxt)・cos(θr/2)・cosθxt+(Gy1−KG・sin(θyt)・sin(θr/2)・cosθyt}=(x方向の成分)+(y方向の成分)、
fg1=m・{(Gz/((cosθxt)・(cosyt))} を求める。
【0095】
また、実状態演算部411は、Sfasm2に関して、
fd2=m・{(Gx1−KG・sinθxt)・cos(θr/2)・cosθxt−(Gy1−KG・sinθyt)・sin(θr/2)・cosθyt}、
fg2=m・{(Gz/((cosθxt)・(cosyt))} を求める。
【0096】
さらに、実状態演算部411は、Sfasm3に関して、
fd3=m・{−(Gy1−KG・sinθyt)・cosθyt}、
fg2=m・{(Gz/((cosθxt)・(cosyt))} を求める。
【0097】
ここで、KGは、例えば、1G、fdiは、減速方向を正、fgiは重力方向を正とする。
また、Gx1=Gx−Kclx・Gx^、Gy1=Gy−Kcly・Gy^である。
ここで、Gxは、重心換算GセンサのX軸方向の値、Gyは、重心換算GセンサのY軸方向の値、Gx^は、車両前後方向のG(=dV/dt)、Gy^は、車両左右¥方向のG(=yaw・V)であり、Kclx、Kclyは所定の係数であり、固定値でも、姿勢制御量θsに従って変化させる等してもよい。
【0098】
また、実状態演算部411は、姿勢制御量θsに対するマップを用いて、θi1(θ11〜θ31)、θi2(θ12〜θ32)、θi3(θ31〜θ33)を求める。
さらに、fri=√{fdi2+fgi2)}を求める。
【0099】
続いて、θIi演算部412は、図14に示す角度θIi1とθIi2を、図13(a)〜(c)、図15に示すθsマップ等を使用して求める。
θIi演算部412は、θIi1、θIi2を次式に従って求める。
θIi0=−θri+θi2
θIi1=π/2−θIi0−θfi
θIi2=θi1−θIi1
【0100】
続いて、min(θi)・||fri||演算部413は、転倒安定余裕度Sfasmiを、θIi1,θIi2,friより、次式に従って求める。
Sfasmi=min(θIi)・||fri||
【0101】
実安定余裕補正量演算部414は、目標安定余裕補正量演算部404と、構成及び機能が同一である。但し、演算の根拠となるデータが目標値では無く車両の現在の実際の値である点が異なる。
【0102】
続いて、実安定余裕補正量演算部414は、図18に示す複数の方向(1−1,1−3,2−2,2−3,3−1,3−2)のうちから、転倒安定余裕度Sfasmiが最も小さい方向を求め、その方向における重心からの力が、フラットな路面で静止状態で立っている重力方向角(路面に垂直な方向)に一致するように、補正量を設定する。この補正量を求めるため、本実施形態では、図20に示すように、場面毎(転倒しやすい方向毎)に補正量を予め設定しておき、適切なものを優先度を付して選択することとする。
【0103】
例えば、図20の第1行は、最も倒れやすい方向が図18の方向1−1と3−1の方向であり、その場合、FR(前輪右)リーンを正方向(ボディ11を下げる方向)に制御し、FL(前輪左)リーンを負方向(ボディ11を持ち上げる方向)に補正制御することを示す。また、リーンの量は、安定余裕度Sfasmが小さくなるに従って、リーン量の量を大きくすることを示す。この場合、FRとFLとは逆方向にリーンするので、逆相となる。さらに、例えば、リーンだけで補正が十分でない場合には、前右輪12にブレーキをかけることにより減速し(FR+)、ブレーキの程度は、転倒安定余裕度Sfasmが大きくなるに従って、大きくなる。さらに、必要ならば、ステアリングを右旋回する。さらに、可能ならば、姿勢制御量(ホイールベース)θsを大きくする。
なお、警報は、Sfasmが最小値よりも小さければ行う。
【0104】
また、前述のように、例えば、図18に示す2−3線の方向への転倒の可能性が最も大きいとすれば、2−3線の方向の(π/2−θi2)−θIi1が最大となり、このとき1−3線の方向も同極性の場合には、図20の第3エントリが選択される。これにより、まず、前右輪12と前左輪13のリーンを下げる補正が設定される。その量は、Sfasmが大きくなるに従って、小さくなる。また、全ての車輪12〜14にブレーキをかける。ブレーキの程度は、Sfasmが大きくなるに従って、小さくなる。また、ステアリングの補正は行わない。以上の処理が実行できない場合には、姿勢制御量θsを大きくし、重心を低下させる。θsは、Sfasmが大きくなるに従って小さくなる。
なお、警報は、Sfasmが最小値よりも小さければ行う。
【0105】
演算処理により、制御量を求めることも可能である。この場合、コントローラ103は、次のようにして姿勢安定化制御を行う。
まず、車両10の姿勢の補正は、基本的には、コントローラ103とリーン右ECU114とリーン左ECU115によるリーンの制御で行う。
【0106】
まず、コントローラ103は、転倒安定余裕度Sfasmi(Sfasm1〜Sfasm3)、及び、Sfasmi*(Sfasm1*〜Sfasm3*)について、制御角LENradrefi(LENradref1〜LENradref3)と、LENradrefi*(LENradref1*〜LENradref3*)[rad]を次式に従って求める。
【0107】
LENradref1 =-kcl・((π/2-θ12)-θI11) = kcl・((π/2-θ13)-θI12)
LENradref2 = [kcl・((π/2-θ22)-θI21)] = [kcl・((π/2-θ23)-θI22)]
LENradref3 = [kcl・((π/2-θ32)-θI31)]/2 = [kcl・((π/2-θ23)-θI22)]/2
LENradref1* = -kcl・((π/2-θ12)-θI11*) = kcl・((π/2-θ13)-θI12*)
LENradref2* = [kcl・((π/2-θ22)-θI21*)] = [kcl・((π/2-θ23)-θI22*)]
LENradref3*=[kcl・((π/2-θ32)-θI31*)]/2 = [kcl・((π/2-θ23)-θI22*)]/2
【0108】
なお、各式の前段は、図21に示す各制御面のθi2側の制御角、後段はθi3側の制御角である。
【0109】
ここで、基準となる、「π/2」については、図22(a)に示すように、進行方向の加速度(重力の影響を含む)Gxに従ってリーン量を制御し、減速時には、π/2を若干大きくして、π/2+αとし、加速時には、π/2−αとする。これにより、減速時は少し前屈みに、加速時は少し後ろ屈みにする。同様に、図22(b)に示すように、Gyによってリーン量を制御し、旋回時には、旋回方向に屈むようする。
【0110】
また、係数kclは、人モードでは、基準値(固定値)とする。
一方、車モードでは、係数kclは、図23に示す係数マップで、重力の影響を除去したY(横)軸方向の加速度θy^の絶対値に基づいて定まる。この例では、係数kclは、加速度θy^の絶対値の増加に伴って一定値→線形に増加→一定値という増加関数の形態をとる。
【0111】
次に、((π/2)−θi2)が最大となる面「i」(i=1〜3)を特定し、そのときの転倒安定余裕度SfasmiとSfasmi*を最小値として選択する。即ち、Sfasm1〜Sfasm3のうち最小のものと、Sfasm1*〜Sfasm3*のうち最小のものと、を選択する。
【0112】
次に、選択したiに相当する制御角|LENradrefi|と|LENradrefi*|を抽出し、|LENradrefi|、|LENradrefi*|>Kmoenが成立するか否かを判別する。Kmoenは、基準値、例えば、0radである。
【0113】
|LENradrefi|、|LENradrefi*|>Kmoenが成立する場合、次のi)とii)のいずれかの手法で補正量を求める。
i)リーン制御量(rad):ΣLENradrefi(i=1,2,3),ΣLENradrefi*(i=1,2,3)即ち、1,2、3面の制御角の加算値を最終制御角とする。
ii)LENradrefi(1,2,3)のうちの最大値を最終制御角とする。
【0114】
次に、各制御対象により、最終的な制御量とその形態が異なるため、変換演算を行う。リーン制御の場合は、最終的には、制御量は直線運動であるので角度[rad]を長さ[mm]に変換する。
まず、最小であると判定されたSfasmのFRとFLの符号から、リーン量が同相か同相でないかを判別する。
FRの移動方向とFLの移動方向(姿勢制御のためのリーン右制御モータ134とリーン左制御モータ135の回転方向)とが同一の場合には、同相となる。
【0115】
制御量が同相の場合、まず、実安定余裕度について、次式に従って、制御角の和(ΣLENradrefi)[rad]を上下動の量[mm]に変換し、LENrefi=θs・tan(ΣLENradrefi)mm とする。即ち、リーン右制御モータ134とリーン左制御モータ135を駆動して、ボディ11を右方も左方もLENrefimmだけ上昇又は下降させることとする。これにより、ボディ11が前後方向に傾斜する。
同様に、目標安定余裕について、LEnrefi*=θs・tan(ΣLENradrefi*)mm(前後傾斜mm)とする。
【0116】
また、制御量が同相でない場合、実安定余裕度について、次式に従って、制御角の和(ΣLENradrefi)[rad]を左右の傾斜[mm]に変換する。LENrefi=Td・tan(ΣLENradrefi)mm
さらに、目標安定余裕度について、次式に従って、制御角の和(ΣLENradrefi*)[rad]を左右の傾斜[mm]に変換する。LEnrefi*=Td・tan(ΣLENradrefi*)mm
ここで、トレッドTdは、前右輪12の中心と、前左輪13の中心の間の距離である。
【0117】
なお、以上の例は、上記i)の3面の制御角の加算値を最終制御角とする例であるが、ii)の3面の制御角のうちの最大制御角を最終制御角とする場合には、LENadrefi=klc・[((π/2−θi2)−θIi2)の最大値]となる。
【0118】
なお、上述の手法とは異なり、リーン右の各リーン制御量とリーン左のリーン制御量とを、目標値と実値別に、次に式に従って個別に求めても良い。
リーン右の、実値にも基づくリーン量:
LENref1=K0・K10・(L23・tan(LENradref2))+K1・K11・(L33・tan(LENradref3))/2
リーン左の、実値にも基づくリーン量:
LENref2=K0・K20・(L13・tan(LENradref2))+K1・K21・(−L33・tan(LENradref3))/2
リーン右の、目標値にも基づくリーン量:
LENref1*=K0・K10・(L23・tan(LENradref2))+K1・K11・(L33・tan(LENradref3*))/2
リーン左の、目標にも基づくリーン量:
LENref2*=K0・K20・(L13・tan(LENradref2))+K1・K21・(−L33・tan(LENradref3*))/2
ここで、K10は、例えば、図24(a)に示す上下限値で定まる。また、K11は、図24(b)に示す上下限値で定まる。
【0119】
さらに、K0は、図25(a)に示すように、姿勢制御量(ホイールベース)θsにより定まる係数、k1は、図25(b)に示すように、前右輪12と前左輪13の距離であるトレッドTdにより定まる値である。なお、図1に示す構成の車両10では、Tdは固定値である。
【0120】
また、上式における「tan(LENradref3)/2」は、リーンの制御については、左右のリーンの差及び重心の位置の低下で行うことにより、最初は、ドライバ19に安心感を持たせ、かつ、制御量が大きくなるように、下記の制御を加えることが望ましい。
【0121】
即ち、図26に一点鎖線DL1で示されているtan(LENradref3)/2(直線)を、実線RL1で示すように、折れ線化する。同様に、二点鎖線DL2で示されている−tan(LENradref3)/2(直線)を、実線RL2で示すように、折れ線化する。
【0122】
これにより、リーンの変化が小さい領域に、tan(LENradref3)が変化しても、LENref1とLENref2が変化しない不感帯を配置し、続いて、わずかに変化するプレ制御帯を配置する。その両側にtan(LENradref3)の変化に対するLENref1及びLENref2の変化よりも傾きの大きい左右差+重心位置低下帯を配置し、さらに、その両側にLENref1又はLENref2の一方のみが変化する左右差帯を設ける。このような制御とすれば、ドライバ19に安心感を持たせつつ、制御量を大きくとることが可能となる。
【0123】
このような制御形態をとると、例えば、車両10の倒れやすい方向が、2−2と1−1で示される場合に、例えば、図27(a)に示すように、リーン右をLENref1だけ上げ(符号は−)、リーン左をLENref2だけ上げると(但し、LENref1=LENref2)、車体10が後方に倒れ、例えば、黒丸で示す前方に偏った状態の重心が白丸で示す中心位置に移動し、車両が安定する。
【0124】
同様に、例えば、車両10の倒れやすい方向が、2−2と3−2で示される場合に、例えば、図27(b)に示すように、リーン右をLENref1だけ上げ(符号は−)、リーン左をLENref2だけ下げる(符号は+)と(但し、|LENref1|=|LENref2|)、車体10が左方に倒れ、例えば、黒丸で示す右方に偏った状態の重心が白丸で示す中心位置に移動し、車両が安定する。
【0125】
また、例えば、車両10の倒れやすい方向が、2−2と3−2で示され、車両の重心が前方に偏っている場合に、例えば、図27(c)に示すように、リーン右をLENref1だけ上げ(符号は−)、リーン左をLENref2だけ下げ(符号は+)と、全体としてはボディ11を持ち上げるようにすると、車体10が後方及び左方に倒れ、例えば、黒丸で示す右方前方に偏った状態の重心が白丸で示す中心位置に移動し、車両が安定する。
【0126】
コントローラ103は、最終的な制御出力を、次式に示すPD(比例微分)制御出力とする。
PD制御出力=LENrefin+Kd・(LENrefin−LENrefi(n−4))/(4/Ts)
即ち、
現在(t=n)のタイミングで、上述の手法で求めたLENrefi=LENrefinと、4動作クロック前のタイミング(t=n−4)でのLENrefi=LENrefi(n−4)との差を4クロック時間4・Tsで割った値に係数Kdを乗算したD項(微分項)に、LENrefin(P(比例)項)を加算した値となる。
【0127】
従って、コントローラ103の最終出力は、
LENref1n+Kd・(LENref1n−LENref1(n−4))/(4/Ts)
LENref2n+Kd・(LENref2n−LENref2(n−4))/(4/Ts)
LENref1n*+Kd・(LENref1n*−LENref1(n−4)*)/(4/Ts)
LENref2n*+Kd・(LENref2n*−LENref2(n−4)*)/(4/Ts)
の4つとなる。
【0128】
上述したように、姿勢安定化制御は、上記リーンによる制御が原則であるが、転倒安定余裕度がなくなる(−の方向に変化する)と、図20に示す順番に、ブレーキの制御、ステアリングの制御、姿勢の制御、加速度の制御の順に制御を加味し、転倒を予防する。
【0129】
こうして、目標安定余裕度演算部218と実安定余裕度演算部219により、目標値に従って動作する場合においても、現状においても転倒の不安定な状態が起こらないような補正が生成される。
また、荷重制御補正量演算部220は、加重の大きさに応じて、補正量を設定する。
【0130】
加算器221は、前後制御量演算部216の出力する制御信号と左右制御量演算部217の出力する制御信号との対応するもの同士を加算して出力する。
【0131】
次に、調停処理部222は、目標安定余裕度演算部218により生成された目標安定余裕補正量と実安定余裕度演算部219により生成された実安定余裕補正量とを、前後制御量演算結果と左右制御量演算結果に加算して補正する。
具体的には、調停処理部222は、例えば、図28に示すような構成を有し、前後制御量演算部216、左右制御量演算部217が出力する、各制御量に、目標安定余裕度演算部218が生成した補正量と、実安定余裕度演算部219が生成した補正量と、荷重制御補正量演算部220が生成した補正量とを加算して、出力部223に出力する。
【0132】
このうち、調停処理部222は、リーン制御については、以下のマップ演算により、補正量を状況に応じてさらに補正して、差分を加算する。
まず、図29に示すように、上述の説明で得られた制御量LENrefiが入力する。
次に、kfbマップ261を用いて、√(θx^2+θy^2)に対応する値fkbを求め、これを乗算器271により、LENrefiに乗算する。
ここで、kfbマップは、加速度センサの出力に基づいて、車両が移動中で加速度がある場合には、係数kfbが0.5となり、停止中は、1となるように、設定されている、但し、一定の操作が行われた乗降モードの時には、0.7に設定し、通常時よりも係数を小さくする。これは、ドライバ19の乗降時に、姿勢安定化制御による車両の移動や動きを抑えるためである。
【0133】
次に、kfb2マップ262を用いて、θxと車両モードに対応する係数fkb2を求め、これを乗算器272により、LENrefiに乗算する。
ここで、kfb2マップ262は、例えば、kfbマップ261に置換して配置される。加速度センサの出力に基づいて、車両が移動中で加速度がある場合には、係数kfbが0.5となり、停止中は、1となるように、設定されている、但し、一定の操作が行われた乗降モードの時には、0.7に設定し、通常時よりも係数を小さくする。これは、ドライバ19の乗降時に、姿勢安定化制御による車両の移動や動きを抑えるためである。
【0134】
さらに、可変フィルタ263を用いて、√(θx^2+θy^2)に対応する値kθ[ms]を乗算する。
【0135】
続いて、制御補正マップ264を用いて、不感帯処理を行う。即ち、入力されたLENrefiが基準値kfb0より小さく、−kfb0より大きい場合いは、これを無視するように処理する。一方、入力値がkfb0以上又は−kfb0以下の場合には、対応する値又は一定の係数を乗算した値を出力する。
【0136】
次に、修正されたLENrefiに路面傾斜角に応じてゲインを乗算機273により乗算する。このゲインは、上述したkbマップと同様のものでよい。あるいは、ゲインは固定値でもよい。
【0137】
次に、LENrefiの値が負の場合には、例えば、0.5〜1のゲインを乗算機274により乗算して補正する。さらに、荷重センサにより、荷重を測定し、荷重に応じてこのゲインを補正してもよい。
【0138】
さらに、ピッチとロールの大きさに応じた上限値を設定する。この例では、ピッチの絶対値|pitch|とロールの絶対値|roll|の大きい方の値maxに応じて、小さくなるスルーレートが設定されている。
このよう処理を行って、最終的なリーンの制御量を出力する。
【0139】
次に、求めたリーン量(mm)を、路面状況に応じて、補正する処理を行う。この補正処理について、図30を参照して説明する。
悪路走行、段差乗り上げ時などでは、位置制御のゲインを下げ、トルク制御のゲインをあげて乗員の乗り心地を良くする処理を行う。
【0140】
まず、リーン右とリーン左のそれぞれに、図30に示す補正機能が用意される。
この制御機能は、図30に示すように、リーン制御量と、リーントルク制御指令、リーン実トルク、悪路判定レベルが入力され、加算機311、Km変換器312、乗算機313、Kn変換器314、乗算機315を備える。
【0141】
リーン制御量は、前段までの演算処理により求められたリーン制御量LENref[mm]である。
【0142】
リーントルク制御指令は、リーン右制御モータ134又はリーン左制御モータ135が出力すべきトルクの指令値であり、コントローラ103が、加速度、荷重、姿勢などに応じて、予め定められた演算式に従って、リーン制御が可能な程度の値に設定する。
【0143】
リーン実トルクは、トルクセンサにより検出されたリーン右制御モータ134又はリーン左制御モータ135の出力トルクの値である。
【0144】
悪路判定レベルは、路面状況を示す指標である。例えば、センサ群102に含まれている加速度センサの出力の変動をモニタし、直近の所定期間の変動回数[回数/秒]や、センサ群102に含まれている荷重センサの測定値の揺れ[測定荷重の変化率]により表される。
【0145】
加算機311は、リーントルク制御指令とリーン実トルクとの差分を求める。
【0146】
Km変換器312は、図31に示す変換マップに従って、悪路判定レベルに対応する係数値(ゲイン)Kmを求める。
【0147】
乗算機313は、Km変換器312により求められた係数値(ゲイン)Kmをリーン制御量mmに乗算する。図31から明らかなように、係数値Kmは、悪路判定レベルが大きくなるに従って、小さくなる。従って、乗算機313の出力は、路面状況が悪く成るに従って、小さくなる。即ち、路面状況が悪く成るに従って姿勢制御におけるリーンのゲインが小さくなる。
【0148】
Kn変換器314は、図31に示す変換マップに従って、悪路判定レベルに対応する係数値(ゲイン)Knを求める。
【0149】
乗算機315は、変換器315により求められた係数値(ゲイン)Knをリーン制御量mmに乗算する。図31から明らかなように、係数値Knは、悪路判定レベルが大きくなるに従って、大きくなる。従って、乗算機315の出力は、路面状況が悪くなるに従って、大きくなる。即ち、路面状況が悪く成るに従って姿勢制御におけるリーンのトルク制御のゲインが大きくなる。
【0150】
乗算機313、315の出力は、対応するリーン右ECU114とリーン左ECU115とに出力される。
【0151】
リーン右ECU114とリーン左ECU115とは、それぞれ、リーン右制御モータ134とリーン左制御モータ135とを駆動する。
【0152】
次に、出力部223は、得られた制御量に基づいて、操作量を求め、対応する各ECU111〜119に供給する。例えば、出力部223は、リーン制御では、左右のリーンの量がmmで指示されるが、これを対応する駆動モータの回転角に変換する。
【0153】
各ECU111〜119は、Hブリッジ回路121〜129を介して、指示された各操作量だけモータ131〜139を駆動する。
これにより、転倒などが起こらず、安定して車両10の運行が可能となる。
【0154】
以上説明したように、この実施形態によれば、
目標値に従って動作したときの車両10の安定余裕度(目標安定余裕度)を求めて、この安定余裕度が増加するように、補正値を求め、さらに、車両10の実際の状況による車両の安定余裕度(実安定余裕度)を求めて、この安定余裕度が増加するように、補正値を求め、これらの補正値により、制御量を補正する。このため、車両10が不安定になりにくく、転倒が起こりにくい。また、リアルタイムの状況に対応して制御が可能となる。
【0155】
また、悪路状況に従って、悪路である程、リーン制御の位置制御のゲインが小さくなり、リーントルク制御のゲインが大きくなる。このため、乗員の乗り心地が良くなる。
【0156】
なお、この発明は、上記実施形態に限定されず、種々の変形及び応用が可能である。
【0157】
悪路状況に従ってリーン位置制御のゲインとリーントルク制御のゲインとを相補的に変化させる他の例として、例えば、車両10が段差に乗り上げた際に、リーン位置制御のゲインとリーントルク制御のゲインとを相補的に変化させるようにしてもよい。
【0158】
この場合、悪路状態にある、即ち、車両10が段差に乗り上げたことは、例えば、路面の傾斜θxが正でかつ所定の判定レベルKdansaを超えていること(θx>Kdansa>0)、かつ、荷重センサの測定値の変化率>基準値となったことにより判定可能である。荷重センサの変化率の基準値は、例えば、直近0.3秒間に30kg(15kg〜50kg)の変化があったこと等である。
【0159】
この場合、コントローラ103は、例えば、図32に示すように、乗り上げ検出後、所定時間(例えば、1秒間)、係数(ゲイン)Knを通常値Knnormalの0から正の値、例えば、0.8に変化させ、係数(ゲイン)Kmを、通常値Kmnormalから小さな値に変化させる。この状態を一定時間(例えば、1秒間)維持し、続いて、元の値まで直線的に変化させて、1.5秒後にKn=Knnormal=0,Km=Kmnormalに戻す。
【0160】
この乗り上げ処理は、悪路判定に基づくゲインの制御よりも優先度が高く設定される。
このような処理を行うことにより、乗り上げによる、乗り心地が良くない状態を改善することが可能となる。
【0161】
なお、上記実施形態においては、指令に基づく姿勢制御と実値に基づく姿勢制御を統合して姿勢制御を行う制御システム100と制御システム100を備える3輪型の車両10に本願発明を適用した例を示した。この発明は上記実施形態に限定されず、図33に示すように、任意の構成の姿勢制御システムに広く適用可能である。
【0162】
図33の例では、姿勢安定化制御システム331からは、リーン位置制御指令とリーントルク制御指令が補正システムに供給される。リーン位置制御指令は、リーン右制御モータ134又はリーン左制御モータ135の回転量[deg]を指示し、一方、リーン実位置は、レゾルバ等の回転角検出器で検出されたリーン右制御モータ134又はリーン左制御モータ135の実際の回転角を表す。
【0163】
加算機332は、姿勢安定化制御システム331から供給されるリーン位置制御指令[deg]とセンサ群102に含まれているモータ回転角センサにより検出されたリーン実位置[deg]との差をリーンの位置制御量[deg]として求める。
【0164】
乗算機333は、加算機332で求めた位置制御量[deg]に任意のゲインKmmを乗算する。
【0165】
乗算機313は、乗算機333の出力に、係数(ゲイン)Kmを乗算する。
【0166】
また、加算機311は、姿勢安定化制御システム331から供給されるリーントルク制御指令[N・m]とセンサ群102に含まれているトルクセンサにより検出されたリーン実トルク[N・deg]との差をリーンのトルク制御量[N・m]として求める。
【0167】
乗算機334は、加算機311で求めたトルク制御量[N・m]に任意のゲインKnnを乗算する。
【0168】
乗算機315は、乗算機334の出力に、係数(ゲイン)Knを乗算する。
【0169】
係数KmとKnとは、図31に例示したように、姿勢安定化制御システム331によって判別された悪路判別レベルが高くなるに従って、即ち、走行路が悪路面に成るに従って、それぞれ、大きくなり、あるいは、小さくなる係数である。
【0170】
乗算機313と315の出力の和が、対応するリーン右ECU114又はリーン左ECU115に出力される。
【0171】
車両の乗り上げについても、同様に、リーン位置とリーントルクが制御される。
【0172】
また、車輪の片輪あるいは両輪が浮いた場合などにも、リーン位置とリーントルクとの配分を制御し、乗り心地をよくすることが望ましい。このような制御を行う場合には、各車輪にかかる荷重の偏差によるリーン位置制御とリーントルク制御が有効である。
【0173】
このための回路構成を図34に示す。なお、図34の回路構成は、右リーンと左リーン用にそれぞれ用意される。
図34の例では、コントローラ103からは、リーン位置制御指令とリーントルク制御指令が補正システムに供給される。リーン位置制御指令は、リーン右制御モータ134又はリーン左制御モータ135の回転量[deg]を指示し、一方、リーン実位置は、レゾルバ等の回転角検出器で検出されたリーン右制御モータ134又はリーン左制御モータ135の実際の回転角を表す。
【0174】
加算機341は、リーン位置制御指令deg*[deg]とリーン実位置[deg]との差をリーンの位置制御量[deg]として求める。
【0175】
乗算機342は、加算機341で求めた位置制御量[deg]に任意のゲインKmmを乗算する。ゲインKmmは、例えば、1でもよい。
【0176】
乗算機343は、乗算機342の出力に、コントローラ103から供給される係数(ゲイン)Kmを乗算する。
【0177】
また、加算機344は、リーントルク制御指令Iqr*[N・m]とリーン実トルク[N・m]との差をリーンのトルク制御量[N・m]として求める。
【0178】
乗算機345は、加算機344で求めたトルク制御量[N・m]に任意のゲインKnnを乗算する。ゲインKnnは、例えば、1でもよい。
【0179】
乗算機346は、乗算機345の出力に、コントローラ103から供給される係数(ゲイン)Knを乗算する。
【0180】
乗算機343と346の出力の和が、対応するリーン右ECU114又はリーン左ECU115に出力される。
【0181】
係数KmとKnとは、図35に例示したように、コントローラ103により生成される指数ΔW*の変化に対して、相補的に変化する。
【0182】
ここで、指数ΔW*は、前輪にかかる荷重の目標値Wf*と、リーンモータのトルクから推定した荷重Wf*^との差分、すなわち、目標荷重と実荷重との偏差に相当する。例えば、リーン右に注目すると、指数ΔW*は、前右輪12にかかる荷重の目標値Wfr*と、リーン右制御モータ134のトルクから推定した荷重Wfr*^との差分、すなわち、目標荷重と実荷重との偏差に相当する。同様に、リーン左に注目すると、指数ΔW*は、前左輪13にかかる荷重の目標値ΔWfL*と、リーン左制御モータ135のトルクから推定した荷重WfL*^との差分、すなわち、目標荷重と実荷重との偏差に相当する。
【0183】
なお、目標値Wfr*と目標値WfL*とは、例えば、次のようにして求めることができる。
Tdr=(Td/2)・cosθy+(h・tanθy)・cosθy
TdL=(Td/2)・cosθy−(h・tanθy)・cosθy
Wfr*=Wfm・TdLm/Tdm+Wfm・(Gx^・cosθy/g)・(hm/Tdm)
WfL*=Wfm・Tdrm/Tdm−Wfm・(Gx^・cosθy/g)・(hm/Tdm)
【0184】
このような構成とすることにより、片車輪あるいは両車輪が浮いた場合などに、車輪に係る荷重の偏差ΔW*が大きくなり、係数Knの比重が大きくなって、トルク制御のゲインが大きくなり、乗り心地が維持される。
【0185】
なお、図35の横軸を車輪のトルクの変動回数/秒とすることにより、上述の悪路状況に対応する位置制御とトルク制御の連続的に補正にも同様のシステム構成を採用できる。
また、図34のリーン位置とリーントルクとの配分を制御回路に関しても、コントローラ103に限定されず、任意の構成の姿勢安定化制御システムに適用可能である。
【0186】
上述の姿勢制御を適切に行うためには、モータ131〜139の回転角の検出が必要である。このため、各モータ131〜139には、図36に示すように、相対角センサ501と絶対角センサ502とが配置されている。相対角センサ501は、適宜設定された基準点からの回転角を測定する。一方、絶対角センサ502は、所定の固定の基準点からの回転角を測定する。
【0187】
これらの回転角センサ501,502は、動作中は、例えば、相対角センサ501の測定角の変化量と絶対角センサ502の測定角の変化量とを比較し、変化量が一致するか否かを判別することにより、各回転角センサ501,502が正常であるか否かを判別することができる。
【0188】
しかし、電源投入時などに、絶対角センサ502が正常であるか否か、さらに、その時点の測定角が正しい値であるか否かを判別することができない。このような問題を解決するため、本実施形態においては、コントローラ103内に書き換え可能な不揮発性メモリ、例えば、フラッシュメモリ511を配置する。コントローラ103は、電源切断時(イグニッションオフ時)には、図37(a)に示すように、所定の終了処理(ステップS11)実行後、絶対角センサ502の値を読み取り(ステップS12)、フラッシュメモリ511に記録し(ステップS13)、電源をオフする(ステップS14)。
【0189】
一方、電源投入時(イグニッションオン時)には、初期化処理を行う一方で、絶対角センサ502の測定値を読み取る(ステップS21)。続いて、フラッシュメモリ511に記憶されていた値を読み出し(ステップS22)、絶対角センサ502から今回読み出した値とフラッシュメモリ511から読み出した値とを比較する(ステップS23)。
【0190】
2つの値が一致すれば(ステップS24;Yes)、絶対角センサ502が正常であると判別し、絶対角センサ502の出力データをモータの回転の絶対角として採用する(ステップS25)。一方、ステップS24で、2つの値が一致しないと判別された場合(ステップS24;No)、所定のエラー処理を行う(ステップS26)。
【0191】
このようにして、絶対角センサの正常・異常を電源投入時に判別することが可能となる。
【0192】
また、例えば、上記実施形態における構成、動作、変数、演算式等が一例であり、これらに限定されるものではない。例えば、図31に示した係数(ゲイン)Kn、Kmを特定するためのマップや、図32に示したタイムテーブルは、適宜変更可能である。
【符号の説明】
【0193】
10 車両
11 ボディ
12 前右輪
13 前左輪
14 後輪
19 ドライバ
21 シート
23 アームレスト
24 アームレスト
25 グリップ操作装置
26 グリップ操作装置
31 前輪右支持機構
32 前輪左支持機構
33 後輪支持機構
34 ステアリング部
100 制御システム
101 操作部
102 センサ群
103 コントローラ
105 Gセンサ
106 レートセンサ
107 ホイールベースセンサ
108 速度センサ
109 リーンセンサ
111 前輪右駆動ECU
112 前輪左駆動ECU
113 ステアリングECU
114 リーン右ECU
115 リーン左ECU
116 姿勢制御ECU
117 ブレーキ前右制御ECU
118 ブレーキ前左制御ECU
119 ブレーキ後制御ECU
121〜129Hブリッジ回路(3相ブリッジ回路)
131〜139 モータ
201 プロセッサ
202 不揮発性メモリ
203 RAM
204 入出力部
211 入力部
212 前後運動目標値演算部
213 左右運動目標値演算部
214 重心位置換算演算部
215 傾斜角推定演算部
216 前後制御量演算部
217 左右制御量演算部
218 目標安定余裕度演算部
219 実安定余裕度演算部
220 荷重制御補正量演算部
221 加算器
222 調停処理部
223 出力部
401 指令状態演算部
402 θIi*演算部
403 min(θi*)・||fri*||演算部
404 目標安定余裕補正量演算部
411 実状態演算部
412 θIi演算部
413 min(θi)・||fri||演算部
414 実安定余裕補正量演算部
【特許請求の範囲】
【請求項1】
ボディと、前輪と、後輪とを備える車両の姿勢を制御する姿勢制御装置において、
車両の運動の目標値を設定する目標値設定手段と、
設定された目標値に基づいて、車両の運動及び姿勢を制御するアクチュエータの制御量を制御するための制御信号を生成する制御量演算手段と、
車両の運転状態を検出する運転状態検出手段と、
前記運転状態検出手段により検出された車両の運転状態と前記目標値設定手段により設定された目標値とに基づいて、車両を安定化させるための補正量を演算する補正量演算手段と、
車両の路面状況を検出する路面状況検出手段と、
前記路面状況検出手段で検出された路面状況に基づいて、前記補正量を修正する補正量修正手段と、
前記制御量演算手段で生成された制御量を、前記補正量修正手段で修正された補正量を用いて補正する補正手段と、
前記補正手段により補正された制御量を用いて、アクチュエータを制御する制御手段と、
を備える姿勢安定化制御装置。
【請求項2】
前記補正量修正手段は、前記路面状況検出手段が路面が所定の悪路であることを検出したとき、又は、車両が段差に乗り上げたことを検出したときに、前記制御手段による姿勢制御のゲインを小さくするように、前記補正量を修正する、
ことを特徴とする請求項1に記載の姿勢安定化制御装置。
【請求項3】
前記補正量修正手段は、前記路面状況検出手段が路面が所定の悪路であることを検出したときに、前記アクチュエータの位置制御量を小さく、トルクを大きくするように、前記補正量を修正する、
ことを特徴とする請求項1に記載の姿勢安定化制御装置。
【請求項4】
前記補正量修正手段は、前記路面状況検出手段が、車両が段差に乗り上げたことを検出したときに、一定時間、前記アクチュエータの位置制御量を小さく、トルクを大きくするように、前記補正量を修正し、その後、元の状態に復帰させる、
ことを特徴とする請求項1に記載の姿勢安定化制御装置。
【請求項5】
前記制御手段は、アクチュエータにより前記ボディを鉛直方向に上下する手段を備え、
前記補正量修正手段は、前記路面状況検出手段が路面が所定の悪路であることを検出したとき、又は、車両が段差に乗り上げたことを検出したときに、前記制御手段によるボディの上下方向への移動の移動量を小さくし、アクチュエータのトルクを大きくするように、前記補正量を修正する、
ことを特徴とする請求項1に記載の姿勢安定化制御装置。
【請求項6】
前記前輪は、右前輪と左前輪を含み、
前記アクチュエータは、右前輪を基準とするボディの高さ、左前輪を基準とするボディの高さ、前輪と後輪との間隔を制御するアクチュエータを含む、
ことを特徴とする請求項1乃至4のいずれか1項に記載の姿勢安定化制御装置。
【請求項7】
請求項1乃至6のいずれか1項に記載の姿勢安定化制御装置を備える車両。
【請求項8】
コンピュータを、
車両の運動の目標値を設定する目標値設定手段、
設定された目標値に基づいて、車両の運動及び姿勢を制御するアクチュエータの制御量を制御するための制御信号を生成する制御量演算手段、
車両の運転状態を検出する運転状態検出手段、
前記運転状態検出手段により検出された車両の運転状態と前記目標値設定手段により設定された目標値とに基づいて、車両を安定化させるための補正量を演算する補正量演算手段、
車両の路面状況を検出する路面状況検出手段と、
前記路面状況検出手段で検出された路面状況に基づいて、前記補正量を修正する補正量修正手段、
前記制御量演算手段で生成された制御量を、前記補正量修正手段で修正された補正量を用いて補正する補正手段と、
前記補正手段により補正された制御量を用いて、アクチュエータを制御する制御手段、
として機能させるコンピュータプログラム。
【請求項1】
ボディと、前輪と、後輪とを備える車両の姿勢を制御する姿勢制御装置において、
車両の運動の目標値を設定する目標値設定手段と、
設定された目標値に基づいて、車両の運動及び姿勢を制御するアクチュエータの制御量を制御するための制御信号を生成する制御量演算手段と、
車両の運転状態を検出する運転状態検出手段と、
前記運転状態検出手段により検出された車両の運転状態と前記目標値設定手段により設定された目標値とに基づいて、車両を安定化させるための補正量を演算する補正量演算手段と、
車両の路面状況を検出する路面状況検出手段と、
前記路面状況検出手段で検出された路面状況に基づいて、前記補正量を修正する補正量修正手段と、
前記制御量演算手段で生成された制御量を、前記補正量修正手段で修正された補正量を用いて補正する補正手段と、
前記補正手段により補正された制御量を用いて、アクチュエータを制御する制御手段と、
を備える姿勢安定化制御装置。
【請求項2】
前記補正量修正手段は、前記路面状況検出手段が路面が所定の悪路であることを検出したとき、又は、車両が段差に乗り上げたことを検出したときに、前記制御手段による姿勢制御のゲインを小さくするように、前記補正量を修正する、
ことを特徴とする請求項1に記載の姿勢安定化制御装置。
【請求項3】
前記補正量修正手段は、前記路面状況検出手段が路面が所定の悪路であることを検出したときに、前記アクチュエータの位置制御量を小さく、トルクを大きくするように、前記補正量を修正する、
ことを特徴とする請求項1に記載の姿勢安定化制御装置。
【請求項4】
前記補正量修正手段は、前記路面状況検出手段が、車両が段差に乗り上げたことを検出したときに、一定時間、前記アクチュエータの位置制御量を小さく、トルクを大きくするように、前記補正量を修正し、その後、元の状態に復帰させる、
ことを特徴とする請求項1に記載の姿勢安定化制御装置。
【請求項5】
前記制御手段は、アクチュエータにより前記ボディを鉛直方向に上下する手段を備え、
前記補正量修正手段は、前記路面状況検出手段が路面が所定の悪路であることを検出したとき、又は、車両が段差に乗り上げたことを検出したときに、前記制御手段によるボディの上下方向への移動の移動量を小さくし、アクチュエータのトルクを大きくするように、前記補正量を修正する、
ことを特徴とする請求項1に記載の姿勢安定化制御装置。
【請求項6】
前記前輪は、右前輪と左前輪を含み、
前記アクチュエータは、右前輪を基準とするボディの高さ、左前輪を基準とするボディの高さ、前輪と後輪との間隔を制御するアクチュエータを含む、
ことを特徴とする請求項1乃至4のいずれか1項に記載の姿勢安定化制御装置。
【請求項7】
請求項1乃至6のいずれか1項に記載の姿勢安定化制御装置を備える車両。
【請求項8】
コンピュータを、
車両の運動の目標値を設定する目標値設定手段、
設定された目標値に基づいて、車両の運動及び姿勢を制御するアクチュエータの制御量を制御するための制御信号を生成する制御量演算手段、
車両の運転状態を検出する運転状態検出手段、
前記運転状態検出手段により検出された車両の運転状態と前記目標値設定手段により設定された目標値とに基づいて、車両を安定化させるための補正量を演算する補正量演算手段、
車両の路面状況を検出する路面状況検出手段と、
前記路面状況検出手段で検出された路面状況に基づいて、前記補正量を修正する補正量修正手段、
前記制御量演算手段で生成された制御量を、前記補正量修正手段で修正された補正量を用いて補正する補正手段と、
前記補正手段により補正された制御量を用いて、アクチュエータを制御する制御手段、
として機能させるコンピュータプログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【公開番号】特開2010−167839(P2010−167839A)
【公開日】平成22年8月5日(2010.8.5)
【国際特許分類】
【出願番号】特願2009−10436(P2009−10436)
【出願日】平成21年1月20日(2009.1.20)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年8月5日(2010.8.5)
【国際特許分類】
【出願日】平成21年1月20日(2009.1.20)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]