
姿勢標定装置、姿勢標定方法および姿勢標定プログラム
【課題】姿勢角の標定処理において、少なくとも1本の基線ベクトルに対する二重位相差の観測値が得られる場合に姿勢角の誤差の拡大を抑えることを可能にする。
【解決手段】二重位相差算出部120は複数のGPS受信機952が観測した搬送波位相に基づいて二重位相差の観測値を算出する。また、二重位相差推定部130は姿勢角の標定値に基づいて二重位相差の推定値を算出する。次に、二重位相差残差計算部140は二重位相差の観測値と二重位相差の推定値との差分を算出する。そして、カルマンフィルタ150は二重位相差の観測値と推定値との差分に基づいて補正量を算出し、姿勢角計算部110はジャイロ953が測定したレートを積分して算出した姿勢角の計算値を補正量で補正して姿勢角の標定値を算出する。
【解決手段】二重位相差算出部120は複数のGPS受信機952が観測した搬送波位相に基づいて二重位相差の観測値を算出する。また、二重位相差推定部130は姿勢角の標定値に基づいて二重位相差の推定値を算出する。次に、二重位相差残差計算部140は二重位相差の観測値と二重位相差の推定値との差分を算出する。そして、カルマンフィルタ150は二重位相差の観測値と推定値との差分に基づいて補正量を算出し、姿勢角計算部110はジャイロ953が測定したレートを積分して算出した姿勢角の計算値を補正量で補正して姿勢角の標定値を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、GPS(Global Positioning System)とジャイロセンサ(以下、ジャイロとする)を用いた姿勢標定処理における姿勢標定装置、姿勢標定方法および姿勢標定プログラムに関するものである。
【背景技術】
【0002】
姿勢標定技術にはGPSが用いられ、GPSだけ(非カップリング)を用いて姿勢標定するもの、GPSとジャイロをカップリングして姿勢標定するものがある。
GPSを用いる従来の姿勢標定では、同時刻の搬送波位相について二重位相差を観測する必要があり、GPS受信機間の受信タイミングの同期を取るために、全てのGPS受信機を単一の発信器で駆動する、いわゆる専用受信機が使われている。
また、GPSだけ(非カップリング)を用いた従来の姿勢標定では、エポック(観測周期)毎に搬送波位相の整数値バイアスを探索して二重位相差を求めている。そして、二重位相差で特定される各GPS受信機の相対位置に基づいて2本以上の基線ベクトルを算出し、2本以上の基線ベクトルに基づいて姿勢角を算出している。
また、GPSとジャイロをカップリングした従来の姿勢標定では、ジャイロの測定値に基づく姿勢角とGPS受信機の観測値に基づく姿勢角との差分に基づいてジャイロの測定値に基づく姿勢角を補正(観測更新)して姿勢角を標定している。そして、GPS受信機の観測値に基づく姿勢角の計算値を算出するため、上記のGPSだけ(非カップリング)を用いた従来の姿勢標定と同じく、二重位相差を算出して2本以上の基線ベクトルを算出している。
上記従来の姿勢標定では、1本の基線ベクトルで方位角と仰角とが定まり、2本の基線ベクトルで形成される平面に対して回転角が定まることを利用して姿勢角(回転角[ロール]、仰角[ピッチ]、方位角[ヨー])を算出している。
【特許文献1】特開平11−94573号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、GPSを用いる従来の姿勢標定は、専用受信機を使用するため用途が限定され、ハードウェアの構成も特殊となることから姿勢標定装置は必然的に高価なものとなる。
そして、GPSだけ(非カップリング)を用いた従来の姿勢標定では、2本以上の基線ベクトルに対して二重位相差の観測値が得られていない場合、姿勢角を得ることが出来ない。つまり、3機以上のGPS受信機について搬送波位相を観測し二重位相差の観測値が得られていない場合、2本以上の基線ベクトルを算出できず姿勢角を得ることが出来ない。
さらに、エポック毎に搬送波位相の整数値バイアスを探索する必要があるため、計算負荷が高く、前回のエポックまでに算出した姿勢角を利用して不適切な観測値を棄却することが出来ない。
また、GPSとジャイロをカップリングした従来の姿勢標定では、カップリングに姿勢角が利用されているため、2本以上の基線ベクトルに対して二重位相差が観測されてなければ観測更新が出来ずに姿勢角の標定値の精度が落ちる。
つまり、3機以上のGPS受信機が同時にGPS観測を行う必要があるためGPS観測のアベイラビリティが低下する可能性が高くなる。そこで、姿勢角の標定値の精度を落とさないためには安定性の高いジャイロが必要となり姿勢標定装置が比較的高価なものとなる。
また、オイラー角(局所座標系[例えば、ジャイロの測定値が属する座標系]での姿勢角)には特異点(ピッチが90°)が存在し、特異点ではロールとヨーとを区別して算出することができない。このため、3つ以上のGPS受信機が同時にGPS観測が行える場合でも、特異点においては観測更新が正常に出来ず、姿勢角の標定値の精度が落ちる。
【0004】
本発明は、例えば、少なくとも1本の基線ベクトルに対する二重位相差の観測値が得られる場合に姿勢角の誤差の拡大を抑えることを可能にすることを目的とする。また、例えば、GPS観測のアベイラビリティを向上することを目的とする。また、例えば、安定性の低い低価格なジャイロを使用した構成を可能にすることを目的とする。
【課題を解決するための手段】
【0005】
本発明の姿勢標定装置は、ジャイロの測定値を用いて計算した姿勢角の計算値をGPS(Global Positioning System)受信機の観測値に基づいて補正して姿勢角の標定値を算出する姿勢標定装置であり、前記ジャイロの測定値に基づき中央処理装置を用いて姿勢角の計算値を算出する姿勢角計算部と、複数のGPS受信機が観測した搬送波位相を入力し中央処理装置を用いて複数のGPS受信機における二重位相差の観測値を算出する二重位相差算出部と、算出した姿勢角の標定値に基づき中央処理装置を用いて複数のGPS受信機における二重位相差の推定値を算出する二重位相差推定部と、前記二重位相差算出部が算出した複数のGPS受信機における二重位相差の観測値と前記二重位相差推定部が算出した複数のGPS受信機における二重位相差の推定値との差分を中央処理装置を用いて算出する二重位相差残差計算部と、前記二重位相差残差計算部が算出した複数のGPS受信機における二重位相差の観測値と推定値との差分に基づき前記姿勢角計算部が算出した姿勢角の計算値に対する補正量を中央処理装置を用いて算出する補正量算出部と、前記補正量算出部が算出した補正量に基づき前記姿勢角計算部が算出した姿勢角の計算値を中央処理装置を用いて補正して姿勢角の標定値を算出する姿勢角標定部とを備えたことを特徴とする。
【発明の効果】
【0006】
本発明によれば、オイラー姿勢角ではなくで二重位相差を利用してGPSとジャイロとをカップリング、つまり、観測更新することにより、例えば、少なくとも1本の基線ベクトルに対する二重位相差の観測値を得られている場合に姿勢角の誤差の拡大を抑えることが可能である。また、例えば、GPS観測のアベイラビリティを向上することができる。また、例えば、安定性の低い低価格なジャイロを使用した構成を可能にすることができる。
【発明を実施するための最良の形態】
【0007】
二重位相差を利用してGPSとジャイロとをカップリングする姿勢標定装置、姿勢標定方法および姿勢標定プログラムについて以下に説明する。
特に、複数のGPS受信機における二重位相差の観測値とジャイロの測定値に基づく二重位相差の推定値との差分に基づいて、ジャイロの測定値に基づく姿勢角の計算値を補正し姿勢角を標定する姿勢標定装置、姿勢標定方法および姿勢標定プログラムについて説明する。
【0008】
実施の形態1.
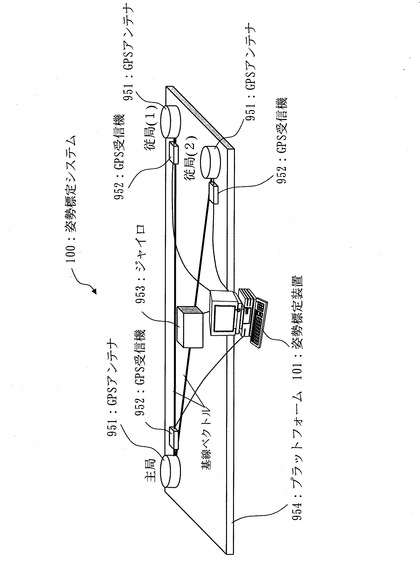
図1は、実施の形態1における姿勢標定システム100の構成の概要図である。
1つのプラットフォーム954上にGPSアンテナ951とGPS受信機952とジャイロ953とを配置し、一緒に動くようにする。このとき、複数のGPSアンテナ951間の相対位置関係は拘束されており、変化しない。
姿勢標定装置101はGPSアンテナ951とGPS受信機952とジャイロ953とが配置された姿勢標定対象(特に、移動体)の姿勢角(ロール[回転角]、ピッチ[仰角]、ヨー[方位角])を標定する。
ここで、複数のGPSアンテナ951間の相対位置関係が保てるのであれば、必ずしもプラットフォーム954を設ける必要はない。
また、GPSアンテナ951間の基線ベクトルにより形成される座標系の座標軸とジャイロ953の測定値が属する座標系の座標軸とを平行に位置付けるため、ジャイロ953の設置姿勢のアライメントを物理的に実施するか、座標軸のずれをソフトウェア的に算出して補正する処理を実装する。以下、姿勢標定装置101が、ジャイロ953の座標軸のずれをソフトウェア的に算出して補正する処理を実装する形態について説明する。ここで、基線ベクトルとは、2点間の距離と方向を示すベクトルであり、例えば、図1における主局から従局(1)へのベクトルや主局から従局(2)へのベクトルのことである。
図1では、姿勢標定システム100は、GPSアンテナ951およびGPS受信機952をプラットフォーム954に3台備えているが、備える台数は2台でも4台以上でも構わない。3台のGPS受信機952のうち最低2台がGPSアンテナ951を介してGPS衛星から測位信号である搬送波を受信し観測値を算出(GPS観測)できれば、1つの基線ベクトルが定まり、姿勢標定装置101は姿勢角を観測更新し標定することができる。
また、ジャイロ953は直交する3軸それぞれの方向について角速度を測定する3軸ジャイロである。
なお、姿勢標定装置101は、ジャイロ953が出力した角速度を積分して姿勢角の算出を行う。以下、ジャイロ953が出力する角速度に対してソフトウェア的に補正量を算出してレベリングし、レベリングした角速度を姿勢角の算出に使用する姿勢標定装置101について説明する。
【0009】
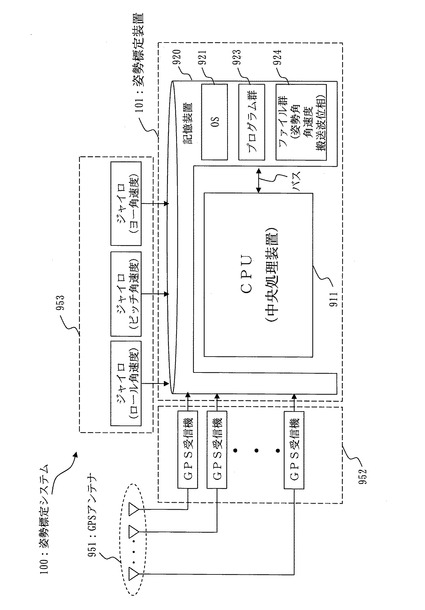
図2は、実施の形態1における姿勢標定システム100のハードウェア構成図である。
姿勢標定システム100は、複数のGPSアンテナ951と各GPSアンテナ951に接続するGPS受信機952と、3軸方向(ロール、ピッチ、ヨー)の角速度を測定するジャイロ953と、姿勢標定装置101とを備える。
各GPS受信機952は、それぞれが接続するGPSアンテナ951がGPS衛星から受信した測位信号(L1、L2、L5など)の搬送波に基づいて搬送波位相、衛星軌道情報、GPS単独測位結果などの観測値を出力する。
ジャイロ953は3軸方向(ロール、ピッチ、ヨー)の角速度(以下、レートという)を測定し出力する。
【0010】
姿勢標定装置101は、プログラムを実行するCPU(Central Processing Unit:中央処理装置)911を備えている。CPU911はバスを介して記憶装置920と接続され、記憶装置920はRAM、ROM、磁気ディスク装置などの記憶機器で構成される。
記憶装置920には、オペレーティングシステム(OS)921、プログラム群923、ファイル群924が記憶されている。プログラム群923は、CPU911、OS921により実行される。
上記プログラム群923には、実施の形態の説明において「〜部」、「カルマンフィルタ」、「アンテナセパレーション」として説明する機能を実行するプログラムが記憶されている。プログラムは、CPU911により読み出され実行される。
ファイル群924には、実施の形態の説明において、「〜情報」として説明するデータ、「〜部」として説明する機能を実行した際の判定結果・演算結果を示すデータ、「〜部」として説明する機能を実行するプログラム間で受け渡しするデータなどが「〜ファイル」として記憶されている。例えば、標定した姿勢角、ジャイロ953が出力したレート、GPS受信機952が出力した搬送波位相などの情報が「〜ファイル」として記憶される。
また、実施の形態の説明において、フローチャートや構成図の矢印の部分は主としてデータの入出力を示し、そのデータの入出力のためにデータは、記憶装置920、あるいは、信号線やその他の伝送媒体により伝送される。
また、実施の形態の説明において「〜部」として説明するものは、ROMに記憶されたファームウェアで実現されていても構わない。或いは、ソフトウェアのみ、或いは、ハードウェアのみ、或いは、ソフトウェアとハードウェアとの組み合わせ、さらには、ファームウェアとの組み合わせで実施されても構わない。
【0011】
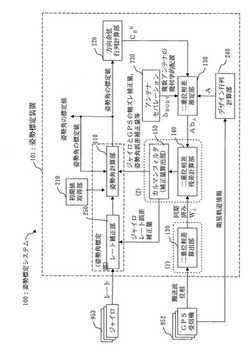
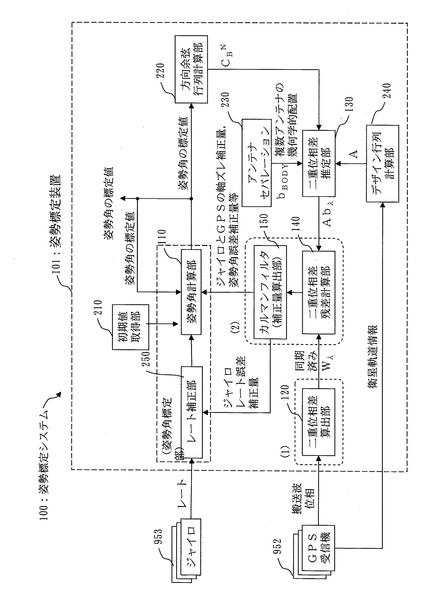
図3は、実施の形態1における姿勢標定装置101の機能構成図である。
実施の形態1における姿勢標定装置101が備える姿勢標定装置101の機能構成を図3に基づいて以下に説明する。
初期値取得部210は姿勢角の初期値を取得する。
アンテナセパレーション230は各GPSアンテナ951の幾何学的配置(機体座標系の基線ベクトルbBODY)を算出する。
方向余弦行列計算部220は姿勢角に基づいて機体座標系の基線ベクトルbBODYを標定座標系の基線ベクトルbNEDに変換する方向余弦行列CBNを計算する。以下、局所座標系(姿勢標定装置101が標定する姿勢角の座標系)をNED(North East Down)座標系として説明する。
デザイン行列計算部240は、GPS受信機952が出力する衛星軌道情報を入力し、衛星軌道情報により定まる方向余弦基底ベクトルe(以下、LOS[Line Of Sight]ベクトルeとする)に基づくデザイン行列Aを計算する。方向余弦基底ベクトルeはGPS受信機952からGPS衛星への基底となるベクトルを示す。
二重位相差推定部130はNED座標系の基線ベクトルbNEDとデザイン行列Aとに基づいて二重位相差の推定値Abλを算出する。
二重位相差算出部120は各GPS受信機952が出力したそれぞれの搬送波位相φに基づいて二重位相差の観測値Wλを算出する。
二重位相差残差計算部140は二重位相差の推定値Abλと二重位相差の観測値Wλとの差分dZλを計算する。
カルマンフィルタ150(補正量算出部の一例)は、状態量(例えば、姿勢角やジャイロセンサ測定誤差の推定値)のダイナミクスをモデル化した状態方程式、観測量(例えば、二重位相差の観測値)と状態量との関係を定式化した観測方程式の両方程式に基づいて状態量の誤差推定を行い状態量の推定精度を改善するフィードバックフィルタであり、差分dZλに基づいてジャイロ953のレート誤差補正量・ジャイロ953とGPSアンテナ951との軸ずれ補正量・姿勢角誤差補正量などの補正量を算出する。
レート補正部250(姿勢角標定部の一例)はジャイロ953が出力したレートをレート誤差補正量に基づいて補正する。
姿勢角計算部110(姿勢角標定部の一例)は、ジャイロ953が出力しレート補正部250が補正したレートで前回の姿勢角の標定値または姿勢角の初期値を積分し、軸ずれ補正量、姿勢角誤差補正量で補正して姿勢角の標定値を算出する。
【0012】
図4は、実施の形態1における姿勢標定システム100の姿勢標定処理を示すフローチャートである。
実施の形態1における姿勢標定システム100が実行する姿勢標定処理の流れ(姿勢標定方法)について図4に基づいて以下に説明する。
なお、姿勢標定処理はコンピュータに実行させることができる。姿勢標定処理をコンピュータに実行させるプログラムが姿勢標定プログラムである。
【0013】
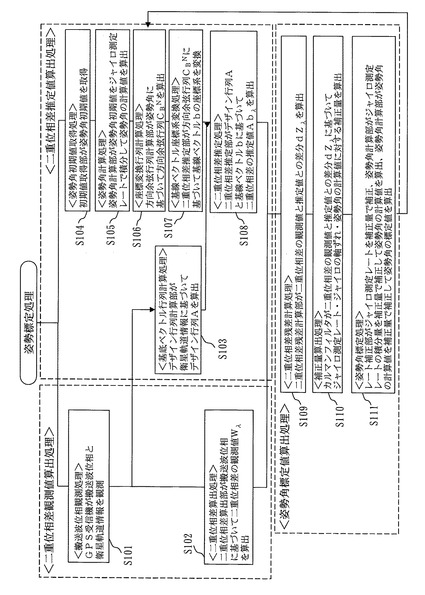
姿勢標定装置101は、GPS受信機952が出力した搬送波位相φに基づいて二重位相差の観測値Wλを算出する(S101〜S102:二重位相差観測値算出処理)と共に、ジャイロ953が測定したレートに基づいて二重位相差の推定値Abλを算出し(S103〜S108:二重位相差推定値算出処理)、二重位相差の観測値Wλと二重位相差の推定値Abλとの差分dZλに基づく補正量で姿勢角を補正し姿勢角の標定値を算出する(S109〜S111:姿勢角標定値算出処理)。
【0014】
ここで、姿勢標定処理における二重位相差の観測値と推定値との関係について説明する。
まず、二重位相差について説明する。
1機の同じGPS衛星に対する2台のGPS受信機の観測値の差を受信機間の一重差といい、2機のGPS衛星に対するGPS受信機の観測値の差を衛星間の一重差という。そして、2つの受信機間の一重差同士の差、または2つの衛星間の一重差同士の差を二重差といい、二重位相差は位相の二重差のことである。
【0015】
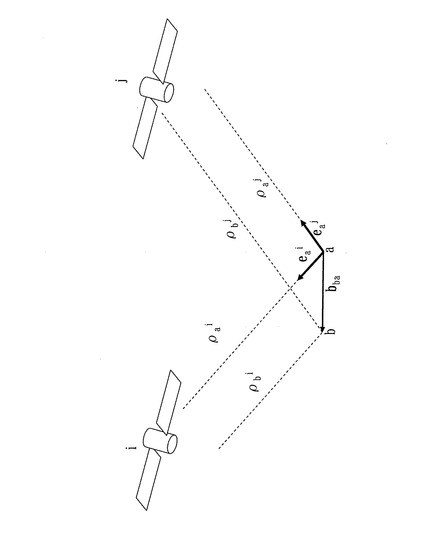
図5は、基線ベクトルbとLOSベクトルeとGPSアンテナからGPS衛星までの距離ρとの関係図である。
図5において、「a」,「b」はGPSアンテナを示し、「i」,「j」はGPS衛星を示す。そして、「bba」はGPSアンテナaからGPSアンテナbへの基線ベクトルを示す。また、「eai」はGPSアンテナaからGPS衛星iへのLOSベクトルを示し、「eaj」はGPSアンテナaからGPS衛星jへのLOSベクトルを示す。また、「ρai」はGPSアンテナaからGPS衛星iまでの距離を示し、「ρbi」はGPSアンテナbからGPS衛星iまでの距離を示し、「ρaj」はGPSアンテナaからGPS衛星jまでの距離を示し、「ρbj」はGPSアンテナbからGPS衛星jまでの距離を示す。
【0016】
図5において、距離の二重差「ρabji」はGPSアンテナからGPS衛星までの距離ρを用いて以下の[式1]で表わされる。
【0017】
ρabji=(ρbj−ρaj)−(ρbi−ρai) [式1]
【0018】
また、GPSアンテナからGPS衛星までの距離ρはGPSアンテナ−GPS衛星間の搬送波の数に搬送波の波長λを乗算した値で表わされ、搬送波の数はGPS受信機が観測可能なドップラー(搬送波位相の時間変化率)の積算値である搬送波位相φと、整数値バイアスと呼ばれる搬送波の数の整数値Nとの合計値で表わされる。つまり、GPSアンテナからGPS衛星までの距離ρは以下の[式2]で表わされる。
【0019】
ρ=λ(φ+N) [式2]
【0020】
ここで、[式2]を用いて[式1]を表わすと以下の[式3]になる。
【0021】
ρabji=λ(φabji−Nabji) [式3]
【0022】
そして、[式3]の「λ(φabji−Nabji)」が距離の二重差の観測値に対応し、「φabji−Nabji」が二重位相差の観測値に対応する。
【0023】
また、図5において、距離の二重差「ρabji」は基線ベクトルbとLOSベクトルeとを用いて以下の[式4]で表わされる。
【0024】
ρabji=−(eaj−eai)×bba [式4]
【0025】
[式4]において、基線ベクトルbbaは姿勢角に応じて機体座標系からNED座標系に変換して算出される計算値であり、[式4]の「−(eaj−eai)×bba」が距離の二重差の推定値に対応し、「(−(eaj−eai)×bba)/λ」が二重位相差の推定値に対応する。
【0026】
また、基線ベクトルbは4つのGPS衛星の位置関係に基づいて特定されるため、GPS衛星を「i」と「j」の2つから「i」・「j」・「k」・「l」の4つに拡張すると上記の[式3]と[式4]とを用いて以下の[関係式5]、[関係式6]が成り立つ。
【0027】
【数1】

【0028】
W=Ab [関係式6]
【0029】
そして、姿勢標定装置101は、上記[関係式5]、[関係式6]において二重位相差の観測値に対応する「W/λ(以下、二重位相差の観測値Wλとする)」を算出する(S101〜S102:二重位相差観測値算出処理)と共に、二重位相差の推定値に対応する「Ab/λ(以下、二重位相差の推定値Abλとする)」を算出し(S103〜S108:二重位相差推定値算出処理)、WλとAbλとの差分dZλに基づく補正量で姿勢角を補正し姿勢角の標定値を算出する(S109〜S111:姿勢角標定値算出処理)。
【0030】
各処理の詳細を以下に説明する。
二重位相差の観測値Wλを算出する二重位相差観測値算出処理(S101〜S102)について説明する。
<二重位相差観測値算出処理>
まず、各GPS受信機952は、それぞれが接続するGPSアンテナ951を介して、4機のGPS衛星から搬送波を受信し、各GPS衛星について搬送波位相φと衛星軌道情報とを観測し出力する(S101:搬送波位相観測処理)。
そして、二重位相差算出部120は、GPS受信機952が出力した搬送波位相φに基づいて二重位相差の観測値Wλを算出する。このとき、二重位相差算出部120は上記[関係式5]におけるWを整数値バイアスNを省いて「W=λφ」で表わし搬送波の波長λで除算してWλを算出する(S102:二重位相差算出処理)
【0031】
次に、二重位相差の推定値Abλを算出する二重位相差推定値算出処理(S103〜S108)について説明する。
<二重位相差推定値算出処理>
デザイン行列計算部240は、各GPS受信機952が出力した衛星軌道情報で特定される4機のGPS衛星の位置関係に基づいて各LOSベクトルeを算出し、上記[関係式5]に示すデザイン行列Aを計算する(S103:基底ベクトル行列計算処理)。
また、初期値取得部210は任意の方法により姿勢角の初期値を取得する。初期値取得部210は、例えば、Hatch法により整数値バイアスNを算出して上記[関係式5]を満たす基線ベクトルbを2つ算出し、2つの基線ベクトルbに基づいて姿勢角の初期値を算出する。また、ジャイロ953が測定したレートと重力方向との関係式に基づいて算出したロール(回転角)およびピッチ(仰角)と、コンパスを有してコンパスが測定したヨー(方位角)とを姿勢角の初期値に用いてもよい。また、キーボードなどの入力装置を有してユーザに姿勢角の初期値を指定させてもよい(S104:姿勢角初期値取得処理)。
次に、姿勢角計算部110は、初期値取得部210が取得した姿勢角の初期値をジャイロ953が出力したレートで積分して当該時点における姿勢角を算出する(S105:姿勢角計算処理)。
次に、方向余弦行列計算部220は、姿勢角計算部110が算出した姿勢角に基づいて、機体座標系の基線ベクトルbBODYをNED座標系の基線ベクトルbNEDに変換する方向余弦行列CBNを計算する(S106:座標変換行列計算処理)。
次に、二重位相差推定部130は、方向余弦行列計算部220が計算した方向余弦行列CBNを用いて局所座標系の基線ベクトルbBODYを変換しNED座標系の基線ベクトルbNEDを算出する。このとき、アンテナセパレーション230は、あらかじめ、各GPSアンテナ951の幾何学的配置に基づいて局所座標系の基線ベクトルbBODYを算出し記憶機器(例えば、記憶装置920)に記憶しておくものとする(S107:基線ベクトル座標系変換処理)。
次に、二重位相差推定部130は、デザイン行列計算部240が計算したデザイン行列Aと二重位相差推定部130が算出したNED座標系の基線ベクトルbNEDとを乗じた値を搬送波の波長λで除算して二重位相差の推定値Abλを算出する(S108:二重位相差推定処理)。
【0032】
次に、二重位相差の観測値Wλと二重位相差の推定値Abλとの差分dZλに基づく補正量で姿勢角を補正し姿勢角の標定値を算出する姿勢角標定値算出処理(S109〜S111)について説明する。
【0033】
姿勢角標定値算出処理(S109〜S111)は、姿勢角標定対象に搭載された複数のGPS受信機952による搬送波位相観測値の二重位相差(二重位相差の観測値)とジャイロ953のレート出力を積分することで得られる幾何学的な二重位相差の予測値(二重位相差の推定値)との残差(差分)により、ジャイロ953が出力するレートや姿勢角計算値及びGPSアンテナアレイとジャイロ953のアライメント誤差等の補正量を計算する処理である。
姿勢角を使用して観測更新をする従来の姿勢標定方法では、アレイを構成するGPSアンテナ951間の2本以上の基線ベクトルに対して二重位相差が同時に観測できる必要がある。一方、実施の形態1で説明する二重位相差を使用して観測更新する姿勢標定方法では、アレイを構成する複数のGPSアンテナ951間の少なくとも1本の基線に対して二重位相差が観測できていればよい。このため、観測更新を頻繁に行え、安定性の低い低価格なジャイロ953を使用して姿勢角を精度良く標定することが可能である。また、GPS受信機952の観測周期が、ジャイロ誤差が拡大する時間に対し十分短ければ、二重位相差の観測残差は±0.5λ(波長)に収まり二重位相差の観測残差は小数値に現れるため、以下に説明するように、整数値バイアスを求めることなく観測更新を行うことができる。さらに、2本以上の基線ベクトルについて処理する場合でも、基線ベクトル間でタイミングを取る必要はない。つまり、2本の基線ベクトルに対する二重位相差の算出の周期を同一にする必要はなく、GPS受信機952の選択の自由度が大きくなる。
【0034】
<姿勢角標定値算出処理>
まず、二重位相差残差計算部140は、二重位相差算出部120が算出した二重位相差の観測値Wλと二重位相差推定部130が算出した二重位相差の推定値Abλとの差分dZλを算出する。このとき、差分dZλの整数値はGPS受信機の観測周期が、ジャイロ誤差が拡大する時間に対し十分短ければ波長λを超えないため、二重位相差の観測残差は、二重位相差残差計算部140は差分dZλの小数値を二重位相差の差分dZλとする(S109:二重位相差残差計算処理)。
次に、カルマンフィルタ150は、二重位相差残差計算部140が算出した差分dZλを使用して状態方程式と観測方程式により、ジャイロ953のレート誤差補正量、ジャイロ953とGPSアンテナ951との軸ずれ補正量、姿勢角誤差補正量などの補正量を算出する(S110:補正量算出処理)。
そして、姿勢角計算部110は、前回の姿勢角の標定値(初回は初期値取得部210が取得した姿勢角の初期値)をジャイロ953が出力したレートで積分し、積分して算出した当該時点の姿勢角を姿勢角誤差補正量に基づいて補正し姿勢角の標定値を計算する。このとき、レート補正部250は、ジャイロ953が出力したレートをレート誤差補正量で補正する。また、姿勢角計算部110は、補正されたレートを積分して積分値(3軸方向それぞれの変動角度)を軸ずれ補正量で補正する。そして、姿勢角計算部110は、補正した積分値を前回の姿勢角の標定値に加算して当該時点の姿勢角を計算し、当該時点の姿勢角を姿勢角誤差補正量に基づいて補正して姿勢角の標定値を計算する(S111:姿勢角標定処理)。
【0035】
姿勢標定システム100は、姿勢角標定処理(S111)で姿勢角を標定後、姿勢角の標定値を使用して座標変換行列計算処理(S106)から処理を繰り返し、当該時点における姿勢角を標定する。
【0036】
上記二重位相差算出処理(S102)において、二重位相差算出部120は、搬送波を受信したタイミングを複数のGPS受信機952間でソフトウェア的に同期させて、二重位相差の観測値Wλを算出する。
【0037】
このとき、複数のGPS受信機952がGPS衛星から測位信号の搬送波を受信したタイミングを精度よく求め、二重位相差算出部120が、例えば、主局のGPS受信機952の搬送波位相の観測値を従局のGPS受信機952の受信時刻に合わせて補間し、タイミングの同期を図っている。これにより、基本的には、どんな汎用のGPS受信機952でも姿勢標定システム100に使用することが出来、低価格な姿勢標定システム100を構成することができる。また、機能、性能(受信周波数、観測値の出力周期など)が異なる複数のGPS受信機952を組み合わせて姿勢標定システム100に使用することができる。
【0038】
また、二重位相差の観測値Wλを算出する方法には、1周波の搬送波を利用する方法と複数の周波(例えば、2周波)の搬送波を利用する方法とがある。
【0039】
2周波受信機は、現在は高価であるが、L5等の新周波が公開された後は価格が低下すると思われる。そこで、2周波受信機を使用した姿勢標定システム100を想定すると、2周波の搬送波位相の観測値について線形結合を取ったワイドレーンの搬送波位相を用いて二重位相差の観測値を算出することができる。そして、ワイドレーンでの搬送波の波長は単周波(1周波)の波長に比べて長く、このため、ワイドレーンの搬送波位相を用いることで引き込み可能な残差(観測値と推定値との二重位相差の差分)の範囲が広がる。例えば、L1の1周波の波長が約19cm(センチメートル)であるに対し、L1とL5との2周波を線形結合したワイドレーンでの波長は約75cmになる。そして、観測値と推定値との距離の二重差の差分が±0.5λ(波長)に収まると仮定すると、1周波(L1)では距離の二重差の差分が±9.5cmを超えると二重位相差の差分が小数値に収まらないのに対し、2周波(L1とL5)では距離の二重差の差分が±37.5cmを超えなければ二重位相差の差分が小数値に収まる。また、上記二重位相差残差計算処理(S109)において、二重位相差残差計算部140は差分dZλの小数値を二重位相差の差分として処理するため、二重位相差の差分が小数値に収まらなければ標定する姿勢角の精度が落ちる。つまり、引き込み可能な残差の範囲が広がるほど、上記二重位相差残差計算処理(S109)の整合性が高まり、精度の高い姿勢角を標定することが可能になる。
【0040】
以下に、1周波を利用する方法と複数の周波を利用する方法とのそれぞれについて、二重位相差算出部120と二重位相差算出処理(S102)とを説明する。
【0041】
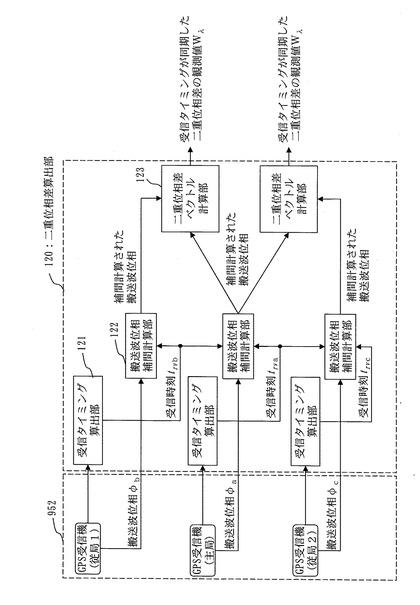
図6は、実施の形態1における1周波を利用する二重位相差算出部120の構成図である。
1周波を利用する二重位相差算出部120は以下の機能要素を備える。
受信タイミング算出部121は各GPS受信機952が搬送波を受信した受信時刻trvを算出する。
搬送波位相補間計算部122は補間計算を行い複数のGPS受信機952について同じ受信時刻における搬送波位相φXを算出する。
二重位相差ベクトル計算部123は複数のGPS受信機952の同じ受信時刻における搬送波位相φについて二重位相差の観測値Wλを計算する。
【0042】
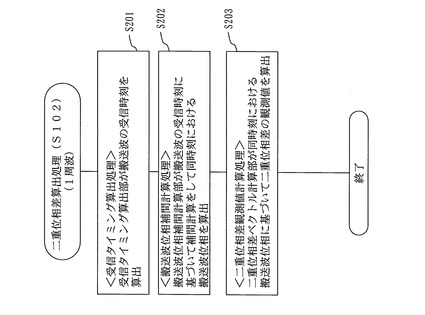
図7は、実施の形態1における1周波を利用する二重位相差算出処理(S102)を示すフローチャートである。
1周波を利用する二重位相差算出処理(S102)を図7に基づいて以下に説明する。
このとき、上記搬送波位相観測処理(S101)において、各GPS受信機952が1周波(例えば、L1)の搬送波を受信して搬送波位相φX(φa、φb、φc)を出力したものとする。
【0043】
<二重位相差算出処理(S102)>
まず、受信タイミング算出部121は、各GPS受信機952から搬送波の観測時刻trvoを取得し、最小自乗法などにより各GPS受信機952のクロックバイアスtrvBiasを計算する。そして、搬送波の観測時刻trvoからクロックバイアスtrvBiasを減算して搬送波の受信時刻trvを算出する(S201:受信タイミング算出処理)。
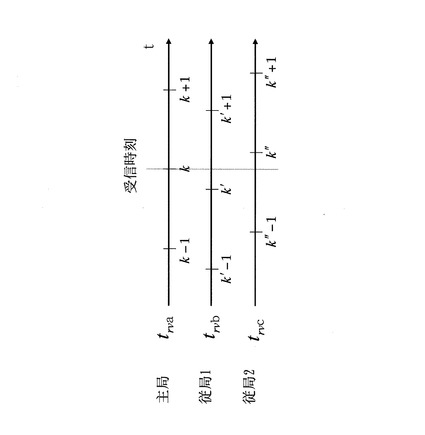
次に、搬送波位相補間計算部122は、各GPS受信機952が算出した搬送波位相φXと受信タイミング算出部121が算出した各GPS受信機952の搬送波の受信時刻trvX(trva,trvb,trvc)とに基づいて補間計算を行い同じ受信時刻における搬送波位相φX(t)を算出する。補間計算は線形補間、一次補間、二次補間など任意の補間計算で構わない。例えば、二次補間計算の場合、搬送波位相補間計算部122は、図8に示す受信時刻の関係において、各GPS受信機952が出力した搬送波位相φa、φb、φcを受信時刻kで同期した搬送波位相φa(k)、φb(k)、φc(k)を以下の[式7]を計算して算出する(S202:搬送波位相補間計算処理)。
【0044】
【数2】
【0045】
そして、二重位相差ベクトル計算部123は、搬送波位相補間計算部122が算出した搬送波位相φX(t)に基づいて二重位相差の観測値Wλ(ベクトル)を算出する。このとき、二重位相差ベクトル計算部123は上記[関係式5]におけるWを整数値バイアスNを省いて「W=λφ」で表わし搬送波の波長λで除算してWλを算出する。例えば、GPS衛星iとGPS衛星jそれぞれについて、主局の搬送波位相φai、φajと従局1の搬送波位相φbi、φbjとの二重位相差の観測値φabji(スカラー)を算出する場合、二重位相差ベクトル計算部123は以下の[式8]を計算する。そして、4機のGPS衛星についての二重位相差の観測値Wλ(ベクトル)を算出する(S203:二重位相差観測値計算処理)。
【0046】
φabji=φbj−φaj−(φbi−φai) [式8]
【0047】
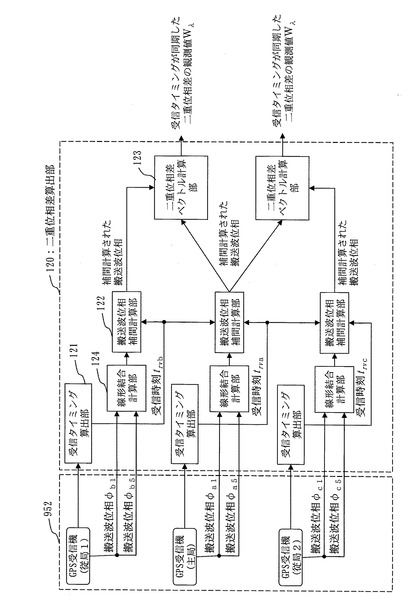
図9は、実施の形態1における2周波を利用する二重位相差算出部120の構成図である。
2周波を利用する二重位相差算出部120は、図9に基づいて説明した1周波を利用する二重位相差算出部120の機能要素に加えて線形結合計算部124を備える。
線形結合計算部124は各GPS受信機952が出力した複数の周波の搬送波位相φXYを線形計算して線形結合後の搬送波位相φXを算出する。
【0048】
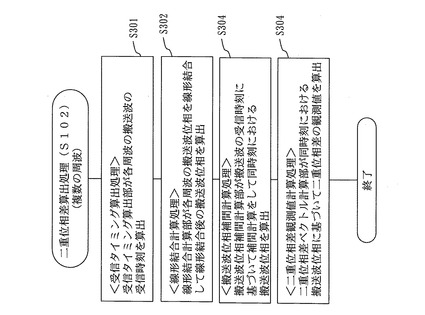
図10は、実施の形態1における複数の周波を利用する二重位相差算出処理(S102)を示すフローチャートである。
複数の周波を利用する二重位相差算出処理(S102)を図10に基づいて以下に説明する。
このとき、上記搬送波位相観測処理(S101)において、各GPS受信機952が2周波(例えば、L1とL5)の搬送波を受信して搬送波位相φXY(φa1、φa5、φb1、φb5、φc1、φc5)を出力したものとする(φa1,φb1,φc1:第1の搬送波位相の一例)(φa5,φb5,φc5:第2の搬送波位相の一例)。
【0049】
<二重位相差算出処理(S102)>
まず、受信タイミング算出部121は、各GPS受信機952から各周波それぞれの搬送波の観測時刻trvoを取得し、最小自乗法により各GPS受信機952のクロックバイアスtrvBiasを計算する。そして、搬送波の観測時刻trvoからクロックバイアスtrvBiasを減算して搬送波の受信時刻trvを算出する(S201:受信タイミング算出処理)。
次に、線形結合計算部124は各GPS受信機952が出力した各周波の搬送波位相φXYを線形計算して線形結合後の搬送波位相φXを算出する(S302:線形結合計算処理)。
以下、二重位相差算出部120は、S303とS304とをそれぞれ前記S202とS203と同様に実行する。
【0050】
図6、図9には3台のGPS受信機952を示しているが、GPS受信機952は3台以上あればよく、台数を増して構わない。
また、受信タイミング算出部121、搬送波位相補間計算部122、二重位相差ベクトル計算部123および線形結合計算部124をGPS受信機952に対応して複数示しているが、1つずつで構わない。
また、基線ベクトル間で同期して二重位相差の観測値を算出する必要はなく、例えば、図6と図9とに3つ示している搬送波位相補間計算部122の真ん中の1つは処理しなくても構わない。
【0051】
上記実施の形態1で説明した姿勢標定装置101は、GPSアンテナ951間の2つの基線ベクトルを求めて算出した姿勢角の初期値をジャイロ953のレート出力により更新(積分)し、時間の経過とともに拡大する各種誤差を、GPS観測に基づく二重位相差を利用して観測更新することで、精度よく姿勢角を出力する装置である。
特に、図3に(1)と(2)で示す、二重位相差算出部120と二重位相差残差計算部140とカルマンフィルタ150とが特徴点である。
【0052】
上記実施の形態1で説明した姿勢標定装置101は、GPSとジャイロをカップリングすることにより、以下のメリットを有する。
まず、GPS衛星可視時は、観測更新によりジャイロ誤差の高精度な補正を行うことができ、姿勢角の高精度化が可能である。
また、GPS衛星が不可視の時でもジャイロが出力するレートで積分することで姿勢角の出力が可能である。
また、GPS受信機の観測周期に比べ、一般的にジャイロの出力周期は早いため、高周波で姿勢角を出力することが可能である。
【0053】
上記実施の形態1で説明した姿勢標定装置101は、単独測位等により高精度に求まる受信時刻を用いて搬送波位相観測値の補間計算を行い、GPS受信機間の同期をソフトウェア的に取っている。これにより、上記実施の形態1で説明した姿勢標定装置は以下のメリットを有する。
基本的には、どんな汎用受信機(GPS受信機)でも使用することが出来、低価格な姿勢標定システム100を構成することができる。
また、機能、性能(受信周波数、観測値の出力周期など)の異なる複数のGPS受信機を組み合わせることが可能となる。そこで、例えば、姿勢標定システム100は測位システムの構成に最適なGPS受信機を測位システムと兼用して姿勢角を標定することができる。
【0054】
上記実施の形態1で説明した姿勢標定装置101は、従来の姿勢標定方法で利用されたオイラー姿勢角ではなく、二重位相差を利用して観測更新することにより、以下のメリットを有する。
まず、GPSのみを利用した従来の姿勢角の決定には同時刻に2本以上の基線ベクトルに対する二重差位相差の観測値を得ることが必要であるのに対し、少なくとも1本の基線ベクトルに対する二重差位相差の観測値が得られていれば、観測更新が行え、誤差の拡大を抑えることが可能である。
つまり、GPS受信機の観測値に基づく観測更新のアベイラビリティが向上することから、安定性の低い低価格なジャイロを使用した構成が可能である。
また、オイラー角にはその特質上、特異点(ピッチ90°)が存在し、観測更新にオイラー角を利用する従来の姿勢標定方法が特異点において適切な観測更新を実施できないのに対し、観測更新に二重位相差を利用する上記実施の形態1の姿勢標定装置101では特異点において適切な観測更新を実施できないということは一切ない。
また、二重位相差の整数値バイアスを正常に求めて姿勢角の絶対量(姿勢角の初期値)を決定した後は、ジャイロのレート出力を積分することで姿勢角を時間更新することが可能である。
また、GPS受信機の観測周期が、ジャイロ誤差が拡大する時間に対し十分短ければ、二重位相差の観測残差は±0.5λ(波長)に収まることから、整数値バイアスを求めることなく観測更新を行うことができる。
つまり、二重位相差の観測残差が特定の閾値(例えば、±0.2λ)を超えた場合、何らかの原因によりGPS受信機が不適切な観測値を出力した、または、ジャイロが不適切なレートを出力したと判断することができ、これらのデータを適切に棄却することができる。
また、現在の高価な2周波受信機または将来は低価格になることが予想されるL5等の新周波対応受信機を使用すれば、2周波の線形結合によりワイドレーンを利用して観測残差を算出することができる。これにより、二重位相差の残差を引き込める領域(例えば、±0.5λ)の範囲を広げることが出来る。
また、GPSとジャイロとをカップリングするときに利用する観測値がオイラー姿勢角である場合に比べ、二重位相差のノイズモデル(カルマンフィルタで使用する状態方程式や観測方程式)のほうが把握しやすく、推定精度が向上する。
【0055】
上記実施の形態1の説明におけるGPSは、Galileo、GLONASS(GLobal NAvigation Satellite System)などのその他のGNSS(Global Navigation Satellite System)であっても構わない。
【図面の簡単な説明】
【0056】
【図1】実施の形態1における姿勢標定システム100の構成の概要図。
【図2】実施の形態1における姿勢標定システム100のハードウェア構成図。
【図3】実施の形態1における姿勢標定装置101の機能構成図。
【図4】実施の形態1における姿勢標定システム100の姿勢標定処理を示すフローチャート。
【図5】基線ベクトルbとLOSベクトルeとGPSアンテナからGPS衛星までの距離ρとの関係図。
【図6】実施の形態1における1周波を利用する二重位相差算出部120の構成図。
【図7】実施の形態1における1周波を利用する二重位相差算出処理(S102)を示すフローチャート。
【図8】主局と従局とにおける搬送波受信時刻の関係図。
【図9】実施の形態1における2周波を利用する二重位相差算出部120の構成図。
【図10】実施の形態1における複数の周波を利用する二重位相差算出処理(S102)を示すフローチャート。
【符号の説明】
【0057】
100 姿勢標定システム、101 姿勢標定装置、110 姿勢角計算部、120 二重位相差算出部、121 受信タイミング算出部、122 搬送波位相補間計算部、123 二重位相差ベクトル計算部、124 線形結合計算部、130 二重位相差推定部、140 二重位相差残差計算部、150 カルマンフィルタ、210 初期値取得部、220 方向余弦行列計算部、230 アンテナセパレーション、240 デザイン行列計算部、250 レート補正部、911 CPU、920 記憶装置、921 OS、923 プログラム群、924 ファイル群、951 GPSアンテナ、952 GPS受信機、953 ジャイロ、954 プラットフォーム。
【技術分野】
【0001】
本発明は、GPS(Global Positioning System)とジャイロセンサ(以下、ジャイロとする)を用いた姿勢標定処理における姿勢標定装置、姿勢標定方法および姿勢標定プログラムに関するものである。
【背景技術】
【0002】
姿勢標定技術にはGPSが用いられ、GPSだけ(非カップリング)を用いて姿勢標定するもの、GPSとジャイロをカップリングして姿勢標定するものがある。
GPSを用いる従来の姿勢標定では、同時刻の搬送波位相について二重位相差を観測する必要があり、GPS受信機間の受信タイミングの同期を取るために、全てのGPS受信機を単一の発信器で駆動する、いわゆる専用受信機が使われている。
また、GPSだけ(非カップリング)を用いた従来の姿勢標定では、エポック(観測周期)毎に搬送波位相の整数値バイアスを探索して二重位相差を求めている。そして、二重位相差で特定される各GPS受信機の相対位置に基づいて2本以上の基線ベクトルを算出し、2本以上の基線ベクトルに基づいて姿勢角を算出している。
また、GPSとジャイロをカップリングした従来の姿勢標定では、ジャイロの測定値に基づく姿勢角とGPS受信機の観測値に基づく姿勢角との差分に基づいてジャイロの測定値に基づく姿勢角を補正(観測更新)して姿勢角を標定している。そして、GPS受信機の観測値に基づく姿勢角の計算値を算出するため、上記のGPSだけ(非カップリング)を用いた従来の姿勢標定と同じく、二重位相差を算出して2本以上の基線ベクトルを算出している。
上記従来の姿勢標定では、1本の基線ベクトルで方位角と仰角とが定まり、2本の基線ベクトルで形成される平面に対して回転角が定まることを利用して姿勢角(回転角[ロール]、仰角[ピッチ]、方位角[ヨー])を算出している。
【特許文献1】特開平11−94573号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかし、GPSを用いる従来の姿勢標定は、専用受信機を使用するため用途が限定され、ハードウェアの構成も特殊となることから姿勢標定装置は必然的に高価なものとなる。
そして、GPSだけ(非カップリング)を用いた従来の姿勢標定では、2本以上の基線ベクトルに対して二重位相差の観測値が得られていない場合、姿勢角を得ることが出来ない。つまり、3機以上のGPS受信機について搬送波位相を観測し二重位相差の観測値が得られていない場合、2本以上の基線ベクトルを算出できず姿勢角を得ることが出来ない。
さらに、エポック毎に搬送波位相の整数値バイアスを探索する必要があるため、計算負荷が高く、前回のエポックまでに算出した姿勢角を利用して不適切な観測値を棄却することが出来ない。
また、GPSとジャイロをカップリングした従来の姿勢標定では、カップリングに姿勢角が利用されているため、2本以上の基線ベクトルに対して二重位相差が観測されてなければ観測更新が出来ずに姿勢角の標定値の精度が落ちる。
つまり、3機以上のGPS受信機が同時にGPS観測を行う必要があるためGPS観測のアベイラビリティが低下する可能性が高くなる。そこで、姿勢角の標定値の精度を落とさないためには安定性の高いジャイロが必要となり姿勢標定装置が比較的高価なものとなる。
また、オイラー角(局所座標系[例えば、ジャイロの測定値が属する座標系]での姿勢角)には特異点(ピッチが90°)が存在し、特異点ではロールとヨーとを区別して算出することができない。このため、3つ以上のGPS受信機が同時にGPS観測が行える場合でも、特異点においては観測更新が正常に出来ず、姿勢角の標定値の精度が落ちる。
【0004】
本発明は、例えば、少なくとも1本の基線ベクトルに対する二重位相差の観測値が得られる場合に姿勢角の誤差の拡大を抑えることを可能にすることを目的とする。また、例えば、GPS観測のアベイラビリティを向上することを目的とする。また、例えば、安定性の低い低価格なジャイロを使用した構成を可能にすることを目的とする。
【課題を解決するための手段】
【0005】
本発明の姿勢標定装置は、ジャイロの測定値を用いて計算した姿勢角の計算値をGPS(Global Positioning System)受信機の観測値に基づいて補正して姿勢角の標定値を算出する姿勢標定装置であり、前記ジャイロの測定値に基づき中央処理装置を用いて姿勢角の計算値を算出する姿勢角計算部と、複数のGPS受信機が観測した搬送波位相を入力し中央処理装置を用いて複数のGPS受信機における二重位相差の観測値を算出する二重位相差算出部と、算出した姿勢角の標定値に基づき中央処理装置を用いて複数のGPS受信機における二重位相差の推定値を算出する二重位相差推定部と、前記二重位相差算出部が算出した複数のGPS受信機における二重位相差の観測値と前記二重位相差推定部が算出した複数のGPS受信機における二重位相差の推定値との差分を中央処理装置を用いて算出する二重位相差残差計算部と、前記二重位相差残差計算部が算出した複数のGPS受信機における二重位相差の観測値と推定値との差分に基づき前記姿勢角計算部が算出した姿勢角の計算値に対する補正量を中央処理装置を用いて算出する補正量算出部と、前記補正量算出部が算出した補正量に基づき前記姿勢角計算部が算出した姿勢角の計算値を中央処理装置を用いて補正して姿勢角の標定値を算出する姿勢角標定部とを備えたことを特徴とする。
【発明の効果】
【0006】
本発明によれば、オイラー姿勢角ではなくで二重位相差を利用してGPSとジャイロとをカップリング、つまり、観測更新することにより、例えば、少なくとも1本の基線ベクトルに対する二重位相差の観測値を得られている場合に姿勢角の誤差の拡大を抑えることが可能である。また、例えば、GPS観測のアベイラビリティを向上することができる。また、例えば、安定性の低い低価格なジャイロを使用した構成を可能にすることができる。
【発明を実施するための最良の形態】
【0007】
二重位相差を利用してGPSとジャイロとをカップリングする姿勢標定装置、姿勢標定方法および姿勢標定プログラムについて以下に説明する。
特に、複数のGPS受信機における二重位相差の観測値とジャイロの測定値に基づく二重位相差の推定値との差分に基づいて、ジャイロの測定値に基づく姿勢角の計算値を補正し姿勢角を標定する姿勢標定装置、姿勢標定方法および姿勢標定プログラムについて説明する。
【0008】
実施の形態1.
図1は、実施の形態1における姿勢標定システム100の構成の概要図である。
1つのプラットフォーム954上にGPSアンテナ951とGPS受信機952とジャイロ953とを配置し、一緒に動くようにする。このとき、複数のGPSアンテナ951間の相対位置関係は拘束されており、変化しない。
姿勢標定装置101はGPSアンテナ951とGPS受信機952とジャイロ953とが配置された姿勢標定対象(特に、移動体)の姿勢角(ロール[回転角]、ピッチ[仰角]、ヨー[方位角])を標定する。
ここで、複数のGPSアンテナ951間の相対位置関係が保てるのであれば、必ずしもプラットフォーム954を設ける必要はない。
また、GPSアンテナ951間の基線ベクトルにより形成される座標系の座標軸とジャイロ953の測定値が属する座標系の座標軸とを平行に位置付けるため、ジャイロ953の設置姿勢のアライメントを物理的に実施するか、座標軸のずれをソフトウェア的に算出して補正する処理を実装する。以下、姿勢標定装置101が、ジャイロ953の座標軸のずれをソフトウェア的に算出して補正する処理を実装する形態について説明する。ここで、基線ベクトルとは、2点間の距離と方向を示すベクトルであり、例えば、図1における主局から従局(1)へのベクトルや主局から従局(2)へのベクトルのことである。
図1では、姿勢標定システム100は、GPSアンテナ951およびGPS受信機952をプラットフォーム954に3台備えているが、備える台数は2台でも4台以上でも構わない。3台のGPS受信機952のうち最低2台がGPSアンテナ951を介してGPS衛星から測位信号である搬送波を受信し観測値を算出(GPS観測)できれば、1つの基線ベクトルが定まり、姿勢標定装置101は姿勢角を観測更新し標定することができる。
また、ジャイロ953は直交する3軸それぞれの方向について角速度を測定する3軸ジャイロである。
なお、姿勢標定装置101は、ジャイロ953が出力した角速度を積分して姿勢角の算出を行う。以下、ジャイロ953が出力する角速度に対してソフトウェア的に補正量を算出してレベリングし、レベリングした角速度を姿勢角の算出に使用する姿勢標定装置101について説明する。
【0009】
図2は、実施の形態1における姿勢標定システム100のハードウェア構成図である。
姿勢標定システム100は、複数のGPSアンテナ951と各GPSアンテナ951に接続するGPS受信機952と、3軸方向(ロール、ピッチ、ヨー)の角速度を測定するジャイロ953と、姿勢標定装置101とを備える。
各GPS受信機952は、それぞれが接続するGPSアンテナ951がGPS衛星から受信した測位信号(L1、L2、L5など)の搬送波に基づいて搬送波位相、衛星軌道情報、GPS単独測位結果などの観測値を出力する。
ジャイロ953は3軸方向(ロール、ピッチ、ヨー)の角速度(以下、レートという)を測定し出力する。
【0010】
姿勢標定装置101は、プログラムを実行するCPU(Central Processing Unit:中央処理装置)911を備えている。CPU911はバスを介して記憶装置920と接続され、記憶装置920はRAM、ROM、磁気ディスク装置などの記憶機器で構成される。
記憶装置920には、オペレーティングシステム(OS)921、プログラム群923、ファイル群924が記憶されている。プログラム群923は、CPU911、OS921により実行される。
上記プログラム群923には、実施の形態の説明において「〜部」、「カルマンフィルタ」、「アンテナセパレーション」として説明する機能を実行するプログラムが記憶されている。プログラムは、CPU911により読み出され実行される。
ファイル群924には、実施の形態の説明において、「〜情報」として説明するデータ、「〜部」として説明する機能を実行した際の判定結果・演算結果を示すデータ、「〜部」として説明する機能を実行するプログラム間で受け渡しするデータなどが「〜ファイル」として記憶されている。例えば、標定した姿勢角、ジャイロ953が出力したレート、GPS受信機952が出力した搬送波位相などの情報が「〜ファイル」として記憶される。
また、実施の形態の説明において、フローチャートや構成図の矢印の部分は主としてデータの入出力を示し、そのデータの入出力のためにデータは、記憶装置920、あるいは、信号線やその他の伝送媒体により伝送される。
また、実施の形態の説明において「〜部」として説明するものは、ROMに記憶されたファームウェアで実現されていても構わない。或いは、ソフトウェアのみ、或いは、ハードウェアのみ、或いは、ソフトウェアとハードウェアとの組み合わせ、さらには、ファームウェアとの組み合わせで実施されても構わない。
【0011】
図3は、実施の形態1における姿勢標定装置101の機能構成図である。
実施の形態1における姿勢標定装置101が備える姿勢標定装置101の機能構成を図3に基づいて以下に説明する。
初期値取得部210は姿勢角の初期値を取得する。
アンテナセパレーション230は各GPSアンテナ951の幾何学的配置(機体座標系の基線ベクトルbBODY)を算出する。
方向余弦行列計算部220は姿勢角に基づいて機体座標系の基線ベクトルbBODYを標定座標系の基線ベクトルbNEDに変換する方向余弦行列CBNを計算する。以下、局所座標系(姿勢標定装置101が標定する姿勢角の座標系)をNED(North East Down)座標系として説明する。
デザイン行列計算部240は、GPS受信機952が出力する衛星軌道情報を入力し、衛星軌道情報により定まる方向余弦基底ベクトルe(以下、LOS[Line Of Sight]ベクトルeとする)に基づくデザイン行列Aを計算する。方向余弦基底ベクトルeはGPS受信機952からGPS衛星への基底となるベクトルを示す。
二重位相差推定部130はNED座標系の基線ベクトルbNEDとデザイン行列Aとに基づいて二重位相差の推定値Abλを算出する。
二重位相差算出部120は各GPS受信機952が出力したそれぞれの搬送波位相φに基づいて二重位相差の観測値Wλを算出する。
二重位相差残差計算部140は二重位相差の推定値Abλと二重位相差の観測値Wλとの差分dZλを計算する。
カルマンフィルタ150(補正量算出部の一例)は、状態量(例えば、姿勢角やジャイロセンサ測定誤差の推定値)のダイナミクスをモデル化した状態方程式、観測量(例えば、二重位相差の観測値)と状態量との関係を定式化した観測方程式の両方程式に基づいて状態量の誤差推定を行い状態量の推定精度を改善するフィードバックフィルタであり、差分dZλに基づいてジャイロ953のレート誤差補正量・ジャイロ953とGPSアンテナ951との軸ずれ補正量・姿勢角誤差補正量などの補正量を算出する。
レート補正部250(姿勢角標定部の一例)はジャイロ953が出力したレートをレート誤差補正量に基づいて補正する。
姿勢角計算部110(姿勢角標定部の一例)は、ジャイロ953が出力しレート補正部250が補正したレートで前回の姿勢角の標定値または姿勢角の初期値を積分し、軸ずれ補正量、姿勢角誤差補正量で補正して姿勢角の標定値を算出する。
【0012】
図4は、実施の形態1における姿勢標定システム100の姿勢標定処理を示すフローチャートである。
実施の形態1における姿勢標定システム100が実行する姿勢標定処理の流れ(姿勢標定方法)について図4に基づいて以下に説明する。
なお、姿勢標定処理はコンピュータに実行させることができる。姿勢標定処理をコンピュータに実行させるプログラムが姿勢標定プログラムである。
【0013】
姿勢標定装置101は、GPS受信機952が出力した搬送波位相φに基づいて二重位相差の観測値Wλを算出する(S101〜S102:二重位相差観測値算出処理)と共に、ジャイロ953が測定したレートに基づいて二重位相差の推定値Abλを算出し(S103〜S108:二重位相差推定値算出処理)、二重位相差の観測値Wλと二重位相差の推定値Abλとの差分dZλに基づく補正量で姿勢角を補正し姿勢角の標定値を算出する(S109〜S111:姿勢角標定値算出処理)。
【0014】
ここで、姿勢標定処理における二重位相差の観測値と推定値との関係について説明する。
まず、二重位相差について説明する。
1機の同じGPS衛星に対する2台のGPS受信機の観測値の差を受信機間の一重差といい、2機のGPS衛星に対するGPS受信機の観測値の差を衛星間の一重差という。そして、2つの受信機間の一重差同士の差、または2つの衛星間の一重差同士の差を二重差といい、二重位相差は位相の二重差のことである。
【0015】
図5は、基線ベクトルbとLOSベクトルeとGPSアンテナからGPS衛星までの距離ρとの関係図である。
図5において、「a」,「b」はGPSアンテナを示し、「i」,「j」はGPS衛星を示す。そして、「bba」はGPSアンテナaからGPSアンテナbへの基線ベクトルを示す。また、「eai」はGPSアンテナaからGPS衛星iへのLOSベクトルを示し、「eaj」はGPSアンテナaからGPS衛星jへのLOSベクトルを示す。また、「ρai」はGPSアンテナaからGPS衛星iまでの距離を示し、「ρbi」はGPSアンテナbからGPS衛星iまでの距離を示し、「ρaj」はGPSアンテナaからGPS衛星jまでの距離を示し、「ρbj」はGPSアンテナbからGPS衛星jまでの距離を示す。
【0016】
図5において、距離の二重差「ρabji」はGPSアンテナからGPS衛星までの距離ρを用いて以下の[式1]で表わされる。
【0017】
ρabji=(ρbj−ρaj)−(ρbi−ρai) [式1]
【0018】
また、GPSアンテナからGPS衛星までの距離ρはGPSアンテナ−GPS衛星間の搬送波の数に搬送波の波長λを乗算した値で表わされ、搬送波の数はGPS受信機が観測可能なドップラー(搬送波位相の時間変化率)の積算値である搬送波位相φと、整数値バイアスと呼ばれる搬送波の数の整数値Nとの合計値で表わされる。つまり、GPSアンテナからGPS衛星までの距離ρは以下の[式2]で表わされる。
【0019】
ρ=λ(φ+N) [式2]
【0020】
ここで、[式2]を用いて[式1]を表わすと以下の[式3]になる。
【0021】
ρabji=λ(φabji−Nabji) [式3]
【0022】
そして、[式3]の「λ(φabji−Nabji)」が距離の二重差の観測値に対応し、「φabji−Nabji」が二重位相差の観測値に対応する。
【0023】
また、図5において、距離の二重差「ρabji」は基線ベクトルbとLOSベクトルeとを用いて以下の[式4]で表わされる。
【0024】
ρabji=−(eaj−eai)×bba [式4]
【0025】
[式4]において、基線ベクトルbbaは姿勢角に応じて機体座標系からNED座標系に変換して算出される計算値であり、[式4]の「−(eaj−eai)×bba」が距離の二重差の推定値に対応し、「(−(eaj−eai)×bba)/λ」が二重位相差の推定値に対応する。
【0026】
また、基線ベクトルbは4つのGPS衛星の位置関係に基づいて特定されるため、GPS衛星を「i」と「j」の2つから「i」・「j」・「k」・「l」の4つに拡張すると上記の[式3]と[式4]とを用いて以下の[関係式5]、[関係式6]が成り立つ。
【0027】
【数1】
【0028】
W=Ab [関係式6]
【0029】
そして、姿勢標定装置101は、上記[関係式5]、[関係式6]において二重位相差の観測値に対応する「W/λ(以下、二重位相差の観測値Wλとする)」を算出する(S101〜S102:二重位相差観測値算出処理)と共に、二重位相差の推定値に対応する「Ab/λ(以下、二重位相差の推定値Abλとする)」を算出し(S103〜S108:二重位相差推定値算出処理)、WλとAbλとの差分dZλに基づく補正量で姿勢角を補正し姿勢角の標定値を算出する(S109〜S111:姿勢角標定値算出処理)。
【0030】
各処理の詳細を以下に説明する。
二重位相差の観測値Wλを算出する二重位相差観測値算出処理(S101〜S102)について説明する。
<二重位相差観測値算出処理>
まず、各GPS受信機952は、それぞれが接続するGPSアンテナ951を介して、4機のGPS衛星から搬送波を受信し、各GPS衛星について搬送波位相φと衛星軌道情報とを観測し出力する(S101:搬送波位相観測処理)。
そして、二重位相差算出部120は、GPS受信機952が出力した搬送波位相φに基づいて二重位相差の観測値Wλを算出する。このとき、二重位相差算出部120は上記[関係式5]におけるWを整数値バイアスNを省いて「W=λφ」で表わし搬送波の波長λで除算してWλを算出する(S102:二重位相差算出処理)
【0031】
次に、二重位相差の推定値Abλを算出する二重位相差推定値算出処理(S103〜S108)について説明する。
<二重位相差推定値算出処理>
デザイン行列計算部240は、各GPS受信機952が出力した衛星軌道情報で特定される4機のGPS衛星の位置関係に基づいて各LOSベクトルeを算出し、上記[関係式5]に示すデザイン行列Aを計算する(S103:基底ベクトル行列計算処理)。
また、初期値取得部210は任意の方法により姿勢角の初期値を取得する。初期値取得部210は、例えば、Hatch法により整数値バイアスNを算出して上記[関係式5]を満たす基線ベクトルbを2つ算出し、2つの基線ベクトルbに基づいて姿勢角の初期値を算出する。また、ジャイロ953が測定したレートと重力方向との関係式に基づいて算出したロール(回転角)およびピッチ(仰角)と、コンパスを有してコンパスが測定したヨー(方位角)とを姿勢角の初期値に用いてもよい。また、キーボードなどの入力装置を有してユーザに姿勢角の初期値を指定させてもよい(S104:姿勢角初期値取得処理)。
次に、姿勢角計算部110は、初期値取得部210が取得した姿勢角の初期値をジャイロ953が出力したレートで積分して当該時点における姿勢角を算出する(S105:姿勢角計算処理)。
次に、方向余弦行列計算部220は、姿勢角計算部110が算出した姿勢角に基づいて、機体座標系の基線ベクトルbBODYをNED座標系の基線ベクトルbNEDに変換する方向余弦行列CBNを計算する(S106:座標変換行列計算処理)。
次に、二重位相差推定部130は、方向余弦行列計算部220が計算した方向余弦行列CBNを用いて局所座標系の基線ベクトルbBODYを変換しNED座標系の基線ベクトルbNEDを算出する。このとき、アンテナセパレーション230は、あらかじめ、各GPSアンテナ951の幾何学的配置に基づいて局所座標系の基線ベクトルbBODYを算出し記憶機器(例えば、記憶装置920)に記憶しておくものとする(S107:基線ベクトル座標系変換処理)。
次に、二重位相差推定部130は、デザイン行列計算部240が計算したデザイン行列Aと二重位相差推定部130が算出したNED座標系の基線ベクトルbNEDとを乗じた値を搬送波の波長λで除算して二重位相差の推定値Abλを算出する(S108:二重位相差推定処理)。
【0032】
次に、二重位相差の観測値Wλと二重位相差の推定値Abλとの差分dZλに基づく補正量で姿勢角を補正し姿勢角の標定値を算出する姿勢角標定値算出処理(S109〜S111)について説明する。
【0033】
姿勢角標定値算出処理(S109〜S111)は、姿勢角標定対象に搭載された複数のGPS受信機952による搬送波位相観測値の二重位相差(二重位相差の観測値)とジャイロ953のレート出力を積分することで得られる幾何学的な二重位相差の予測値(二重位相差の推定値)との残差(差分)により、ジャイロ953が出力するレートや姿勢角計算値及びGPSアンテナアレイとジャイロ953のアライメント誤差等の補正量を計算する処理である。
姿勢角を使用して観測更新をする従来の姿勢標定方法では、アレイを構成するGPSアンテナ951間の2本以上の基線ベクトルに対して二重位相差が同時に観測できる必要がある。一方、実施の形態1で説明する二重位相差を使用して観測更新する姿勢標定方法では、アレイを構成する複数のGPSアンテナ951間の少なくとも1本の基線に対して二重位相差が観測できていればよい。このため、観測更新を頻繁に行え、安定性の低い低価格なジャイロ953を使用して姿勢角を精度良く標定することが可能である。また、GPS受信機952の観測周期が、ジャイロ誤差が拡大する時間に対し十分短ければ、二重位相差の観測残差は±0.5λ(波長)に収まり二重位相差の観測残差は小数値に現れるため、以下に説明するように、整数値バイアスを求めることなく観測更新を行うことができる。さらに、2本以上の基線ベクトルについて処理する場合でも、基線ベクトル間でタイミングを取る必要はない。つまり、2本の基線ベクトルに対する二重位相差の算出の周期を同一にする必要はなく、GPS受信機952の選択の自由度が大きくなる。
【0034】
<姿勢角標定値算出処理>
まず、二重位相差残差計算部140は、二重位相差算出部120が算出した二重位相差の観測値Wλと二重位相差推定部130が算出した二重位相差の推定値Abλとの差分dZλを算出する。このとき、差分dZλの整数値はGPS受信機の観測周期が、ジャイロ誤差が拡大する時間に対し十分短ければ波長λを超えないため、二重位相差の観測残差は、二重位相差残差計算部140は差分dZλの小数値を二重位相差の差分dZλとする(S109:二重位相差残差計算処理)。
次に、カルマンフィルタ150は、二重位相差残差計算部140が算出した差分dZλを使用して状態方程式と観測方程式により、ジャイロ953のレート誤差補正量、ジャイロ953とGPSアンテナ951との軸ずれ補正量、姿勢角誤差補正量などの補正量を算出する(S110:補正量算出処理)。
そして、姿勢角計算部110は、前回の姿勢角の標定値(初回は初期値取得部210が取得した姿勢角の初期値)をジャイロ953が出力したレートで積分し、積分して算出した当該時点の姿勢角を姿勢角誤差補正量に基づいて補正し姿勢角の標定値を計算する。このとき、レート補正部250は、ジャイロ953が出力したレートをレート誤差補正量で補正する。また、姿勢角計算部110は、補正されたレートを積分して積分値(3軸方向それぞれの変動角度)を軸ずれ補正量で補正する。そして、姿勢角計算部110は、補正した積分値を前回の姿勢角の標定値に加算して当該時点の姿勢角を計算し、当該時点の姿勢角を姿勢角誤差補正量に基づいて補正して姿勢角の標定値を計算する(S111:姿勢角標定処理)。
【0035】
姿勢標定システム100は、姿勢角標定処理(S111)で姿勢角を標定後、姿勢角の標定値を使用して座標変換行列計算処理(S106)から処理を繰り返し、当該時点における姿勢角を標定する。
【0036】
上記二重位相差算出処理(S102)において、二重位相差算出部120は、搬送波を受信したタイミングを複数のGPS受信機952間でソフトウェア的に同期させて、二重位相差の観測値Wλを算出する。
【0037】
このとき、複数のGPS受信機952がGPS衛星から測位信号の搬送波を受信したタイミングを精度よく求め、二重位相差算出部120が、例えば、主局のGPS受信機952の搬送波位相の観測値を従局のGPS受信機952の受信時刻に合わせて補間し、タイミングの同期を図っている。これにより、基本的には、どんな汎用のGPS受信機952でも姿勢標定システム100に使用することが出来、低価格な姿勢標定システム100を構成することができる。また、機能、性能(受信周波数、観測値の出力周期など)が異なる複数のGPS受信機952を組み合わせて姿勢標定システム100に使用することができる。
【0038】
また、二重位相差の観測値Wλを算出する方法には、1周波の搬送波を利用する方法と複数の周波(例えば、2周波)の搬送波を利用する方法とがある。
【0039】
2周波受信機は、現在は高価であるが、L5等の新周波が公開された後は価格が低下すると思われる。そこで、2周波受信機を使用した姿勢標定システム100を想定すると、2周波の搬送波位相の観測値について線形結合を取ったワイドレーンの搬送波位相を用いて二重位相差の観測値を算出することができる。そして、ワイドレーンでの搬送波の波長は単周波(1周波)の波長に比べて長く、このため、ワイドレーンの搬送波位相を用いることで引き込み可能な残差(観測値と推定値との二重位相差の差分)の範囲が広がる。例えば、L1の1周波の波長が約19cm(センチメートル)であるに対し、L1とL5との2周波を線形結合したワイドレーンでの波長は約75cmになる。そして、観測値と推定値との距離の二重差の差分が±0.5λ(波長)に収まると仮定すると、1周波(L1)では距離の二重差の差分が±9.5cmを超えると二重位相差の差分が小数値に収まらないのに対し、2周波(L1とL5)では距離の二重差の差分が±37.5cmを超えなければ二重位相差の差分が小数値に収まる。また、上記二重位相差残差計算処理(S109)において、二重位相差残差計算部140は差分dZλの小数値を二重位相差の差分として処理するため、二重位相差の差分が小数値に収まらなければ標定する姿勢角の精度が落ちる。つまり、引き込み可能な残差の範囲が広がるほど、上記二重位相差残差計算処理(S109)の整合性が高まり、精度の高い姿勢角を標定することが可能になる。
【0040】
以下に、1周波を利用する方法と複数の周波を利用する方法とのそれぞれについて、二重位相差算出部120と二重位相差算出処理(S102)とを説明する。
【0041】
図6は、実施の形態1における1周波を利用する二重位相差算出部120の構成図である。
1周波を利用する二重位相差算出部120は以下の機能要素を備える。
受信タイミング算出部121は各GPS受信機952が搬送波を受信した受信時刻trvを算出する。
搬送波位相補間計算部122は補間計算を行い複数のGPS受信機952について同じ受信時刻における搬送波位相φXを算出する。
二重位相差ベクトル計算部123は複数のGPS受信機952の同じ受信時刻における搬送波位相φについて二重位相差の観測値Wλを計算する。
【0042】
図7は、実施の形態1における1周波を利用する二重位相差算出処理(S102)を示すフローチャートである。
1周波を利用する二重位相差算出処理(S102)を図7に基づいて以下に説明する。
このとき、上記搬送波位相観測処理(S101)において、各GPS受信機952が1周波(例えば、L1)の搬送波を受信して搬送波位相φX(φa、φb、φc)を出力したものとする。
【0043】
<二重位相差算出処理(S102)>
まず、受信タイミング算出部121は、各GPS受信機952から搬送波の観測時刻trvoを取得し、最小自乗法などにより各GPS受信機952のクロックバイアスtrvBiasを計算する。そして、搬送波の観測時刻trvoからクロックバイアスtrvBiasを減算して搬送波の受信時刻trvを算出する(S201:受信タイミング算出処理)。
次に、搬送波位相補間計算部122は、各GPS受信機952が算出した搬送波位相φXと受信タイミング算出部121が算出した各GPS受信機952の搬送波の受信時刻trvX(trva,trvb,trvc)とに基づいて補間計算を行い同じ受信時刻における搬送波位相φX(t)を算出する。補間計算は線形補間、一次補間、二次補間など任意の補間計算で構わない。例えば、二次補間計算の場合、搬送波位相補間計算部122は、図8に示す受信時刻の関係において、各GPS受信機952が出力した搬送波位相φa、φb、φcを受信時刻kで同期した搬送波位相φa(k)、φb(k)、φc(k)を以下の[式7]を計算して算出する(S202:搬送波位相補間計算処理)。
【0044】
【数2】
【0045】
そして、二重位相差ベクトル計算部123は、搬送波位相補間計算部122が算出した搬送波位相φX(t)に基づいて二重位相差の観測値Wλ(ベクトル)を算出する。このとき、二重位相差ベクトル計算部123は上記[関係式5]におけるWを整数値バイアスNを省いて「W=λφ」で表わし搬送波の波長λで除算してWλを算出する。例えば、GPS衛星iとGPS衛星jそれぞれについて、主局の搬送波位相φai、φajと従局1の搬送波位相φbi、φbjとの二重位相差の観測値φabji(スカラー)を算出する場合、二重位相差ベクトル計算部123は以下の[式8]を計算する。そして、4機のGPS衛星についての二重位相差の観測値Wλ(ベクトル)を算出する(S203:二重位相差観測値計算処理)。
【0046】
φabji=φbj−φaj−(φbi−φai) [式8]
【0047】
図9は、実施の形態1における2周波を利用する二重位相差算出部120の構成図である。
2周波を利用する二重位相差算出部120は、図9に基づいて説明した1周波を利用する二重位相差算出部120の機能要素に加えて線形結合計算部124を備える。
線形結合計算部124は各GPS受信機952が出力した複数の周波の搬送波位相φXYを線形計算して線形結合後の搬送波位相φXを算出する。
【0048】
図10は、実施の形態1における複数の周波を利用する二重位相差算出処理(S102)を示すフローチャートである。
複数の周波を利用する二重位相差算出処理(S102)を図10に基づいて以下に説明する。
このとき、上記搬送波位相観測処理(S101)において、各GPS受信機952が2周波(例えば、L1とL5)の搬送波を受信して搬送波位相φXY(φa1、φa5、φb1、φb5、φc1、φc5)を出力したものとする(φa1,φb1,φc1:第1の搬送波位相の一例)(φa5,φb5,φc5:第2の搬送波位相の一例)。
【0049】
<二重位相差算出処理(S102)>
まず、受信タイミング算出部121は、各GPS受信機952から各周波それぞれの搬送波の観測時刻trvoを取得し、最小自乗法により各GPS受信機952のクロックバイアスtrvBiasを計算する。そして、搬送波の観測時刻trvoからクロックバイアスtrvBiasを減算して搬送波の受信時刻trvを算出する(S201:受信タイミング算出処理)。
次に、線形結合計算部124は各GPS受信機952が出力した各周波の搬送波位相φXYを線形計算して線形結合後の搬送波位相φXを算出する(S302:線形結合計算処理)。
以下、二重位相差算出部120は、S303とS304とをそれぞれ前記S202とS203と同様に実行する。
【0050】
図6、図9には3台のGPS受信機952を示しているが、GPS受信機952は3台以上あればよく、台数を増して構わない。
また、受信タイミング算出部121、搬送波位相補間計算部122、二重位相差ベクトル計算部123および線形結合計算部124をGPS受信機952に対応して複数示しているが、1つずつで構わない。
また、基線ベクトル間で同期して二重位相差の観測値を算出する必要はなく、例えば、図6と図9とに3つ示している搬送波位相補間計算部122の真ん中の1つは処理しなくても構わない。
【0051】
上記実施の形態1で説明した姿勢標定装置101は、GPSアンテナ951間の2つの基線ベクトルを求めて算出した姿勢角の初期値をジャイロ953のレート出力により更新(積分)し、時間の経過とともに拡大する各種誤差を、GPS観測に基づく二重位相差を利用して観測更新することで、精度よく姿勢角を出力する装置である。
特に、図3に(1)と(2)で示す、二重位相差算出部120と二重位相差残差計算部140とカルマンフィルタ150とが特徴点である。
【0052】
上記実施の形態1で説明した姿勢標定装置101は、GPSとジャイロをカップリングすることにより、以下のメリットを有する。
まず、GPS衛星可視時は、観測更新によりジャイロ誤差の高精度な補正を行うことができ、姿勢角の高精度化が可能である。
また、GPS衛星が不可視の時でもジャイロが出力するレートで積分することで姿勢角の出力が可能である。
また、GPS受信機の観測周期に比べ、一般的にジャイロの出力周期は早いため、高周波で姿勢角を出力することが可能である。
【0053】
上記実施の形態1で説明した姿勢標定装置101は、単独測位等により高精度に求まる受信時刻を用いて搬送波位相観測値の補間計算を行い、GPS受信機間の同期をソフトウェア的に取っている。これにより、上記実施の形態1で説明した姿勢標定装置は以下のメリットを有する。
基本的には、どんな汎用受信機(GPS受信機)でも使用することが出来、低価格な姿勢標定システム100を構成することができる。
また、機能、性能(受信周波数、観測値の出力周期など)の異なる複数のGPS受信機を組み合わせることが可能となる。そこで、例えば、姿勢標定システム100は測位システムの構成に最適なGPS受信機を測位システムと兼用して姿勢角を標定することができる。
【0054】
上記実施の形態1で説明した姿勢標定装置101は、従来の姿勢標定方法で利用されたオイラー姿勢角ではなく、二重位相差を利用して観測更新することにより、以下のメリットを有する。
まず、GPSのみを利用した従来の姿勢角の決定には同時刻に2本以上の基線ベクトルに対する二重差位相差の観測値を得ることが必要であるのに対し、少なくとも1本の基線ベクトルに対する二重差位相差の観測値が得られていれば、観測更新が行え、誤差の拡大を抑えることが可能である。
つまり、GPS受信機の観測値に基づく観測更新のアベイラビリティが向上することから、安定性の低い低価格なジャイロを使用した構成が可能である。
また、オイラー角にはその特質上、特異点(ピッチ90°)が存在し、観測更新にオイラー角を利用する従来の姿勢標定方法が特異点において適切な観測更新を実施できないのに対し、観測更新に二重位相差を利用する上記実施の形態1の姿勢標定装置101では特異点において適切な観測更新を実施できないということは一切ない。
また、二重位相差の整数値バイアスを正常に求めて姿勢角の絶対量(姿勢角の初期値)を決定した後は、ジャイロのレート出力を積分することで姿勢角を時間更新することが可能である。
また、GPS受信機の観測周期が、ジャイロ誤差が拡大する時間に対し十分短ければ、二重位相差の観測残差は±0.5λ(波長)に収まることから、整数値バイアスを求めることなく観測更新を行うことができる。
つまり、二重位相差の観測残差が特定の閾値(例えば、±0.2λ)を超えた場合、何らかの原因によりGPS受信機が不適切な観測値を出力した、または、ジャイロが不適切なレートを出力したと判断することができ、これらのデータを適切に棄却することができる。
また、現在の高価な2周波受信機または将来は低価格になることが予想されるL5等の新周波対応受信機を使用すれば、2周波の線形結合によりワイドレーンを利用して観測残差を算出することができる。これにより、二重位相差の残差を引き込める領域(例えば、±0.5λ)の範囲を広げることが出来る。
また、GPSとジャイロとをカップリングするときに利用する観測値がオイラー姿勢角である場合に比べ、二重位相差のノイズモデル(カルマンフィルタで使用する状態方程式や観測方程式)のほうが把握しやすく、推定精度が向上する。
【0055】
上記実施の形態1の説明におけるGPSは、Galileo、GLONASS(GLobal NAvigation Satellite System)などのその他のGNSS(Global Navigation Satellite System)であっても構わない。
【図面の簡単な説明】
【0056】
【図1】実施の形態1における姿勢標定システム100の構成の概要図。
【図2】実施の形態1における姿勢標定システム100のハードウェア構成図。
【図3】実施の形態1における姿勢標定装置101の機能構成図。
【図4】実施の形態1における姿勢標定システム100の姿勢標定処理を示すフローチャート。
【図5】基線ベクトルbとLOSベクトルeとGPSアンテナからGPS衛星までの距離ρとの関係図。
【図6】実施の形態1における1周波を利用する二重位相差算出部120の構成図。
【図7】実施の形態1における1周波を利用する二重位相差算出処理(S102)を示すフローチャート。
【図8】主局と従局とにおける搬送波受信時刻の関係図。
【図9】実施の形態1における2周波を利用する二重位相差算出部120の構成図。
【図10】実施の形態1における複数の周波を利用する二重位相差算出処理(S102)を示すフローチャート。
【符号の説明】
【0057】
100 姿勢標定システム、101 姿勢標定装置、110 姿勢角計算部、120 二重位相差算出部、121 受信タイミング算出部、122 搬送波位相補間計算部、123 二重位相差ベクトル計算部、124 線形結合計算部、130 二重位相差推定部、140 二重位相差残差計算部、150 カルマンフィルタ、210 初期値取得部、220 方向余弦行列計算部、230 アンテナセパレーション、240 デザイン行列計算部、250 レート補正部、911 CPU、920 記憶装置、921 OS、923 プログラム群、924 ファイル群、951 GPSアンテナ、952 GPS受信機、953 ジャイロ、954 プラットフォーム。
【特許請求の範囲】
【請求項1】
ジャイロの測定値を用いて計算した姿勢角の計算値をGPS(Global Positioning System)受信機の観測値に基づいて補正して姿勢角の標定値を算出する姿勢標定装置であり、
前記ジャイロの測定値に基づき中央処理装置を用いて姿勢角の計算値を算出する姿勢角計算部と、
複数のGPS受信機が観測した搬送波位相を入力し中央処理装置を用いて複数のGPS受信機における二重位相差の観測値を算出する二重位相差算出部と、
算出した姿勢角の標定値に基づき中央処理装置を用いて複数のGPS受信機における二重位相差の推定値を算出する二重位相差推定部と、
前記二重位相差算出部が算出した複数のGPS受信機における二重位相差の観測値と前記二重位相差推定部が算出した複数のGPS受信機における二重位相差の推定値との差分を中央処理装置を用いて算出する二重位相差残差計算部と、
前記二重位相差残差計算部が算出した複数のGPS受信機における二重位相差の観測値と推定値との差分に基づき前記姿勢角計算部が算出した姿勢角の計算値に対する補正量を中央処理装置を用いて算出する補正量算出部と、
前記補正量算出部が算出した補正量に基づき前記姿勢角計算部が算出した姿勢角の計算値を中央処理装置を用いて補正して姿勢角の標定値を算出する姿勢角標定部と
を備えたことを特徴とする姿勢標定装置。
【請求項2】
前記二重位相差算出部は、
各GPS受信機が観測した搬送波位相と各GPS受信機における搬送波の受信時刻とに基づいて補間計算を行い同時刻における各GPS受信機の搬送波位相を算出し、算出した各GPS受信機の搬送波位相に基づいて複数のGPS受信機における二重位相差の観測値を算出する
ことを特徴とする請求項1記載の姿勢標定装置。
【請求項3】
前記二重位相差算出部は、
複数のGPS受信機がそれぞれ観測した第1の搬送波位相と第2の搬送波位相とを入力し第1の搬送波位相と第2の搬送波位相とを線形結合計算して各GPS受信機の線形結合した搬送波位相を算出し線形結合した搬送波位相に基づいて複数のGPS受信機における二重位相差の観測値を算出する
ことを特徴とする請求項1〜請求項2いずれかに記載の姿勢標定装置。
【請求項4】
前記二重位相差推定部は、
前記姿勢標定装置が標定した姿勢角の標定値に基づいて複数のGPS受信機における基線ベクトルを算出し、算出した基線ベクトルと搬送波を送信したGPS衛星に対するGPS受信機の方向余弦基底ベクトルとに基づいて複数のGPS受信機における二重位相差の推定値を算出する
ことを特徴とする請求項1〜請求項3いずれかに記載の姿勢標定装置。
【請求項5】
前記二重位相差残差計算部は、
前記二重位相差算出部が算出した二重位相差の観測値と前記二重位相差推定部が算出した二重位相差の推定値との差を算出し、算出した差の小数値を複数のGPS受信機における二重位相差の観測値と推定値との差分とする
ことを特徴とする請求項1〜請求項4いずれかに記載の姿勢標定装置。
【請求項6】
ジャイロの測定値を用いて計算した姿勢角の計算値をGPS(Global Positioning System)受信機の観測値に基づいて補正して姿勢角の標定値を算出する姿勢標定装置の姿勢標定方法であり、
姿勢角計算部がジャイロの測定値に基づき中央処理装置を用いて姿勢角の計算値を算出する姿勢角計算処理と、
二重位相差算出部が各GPS受信機の観測した搬送波位相を入力し中央処理装置を用いて複数のGPS受信機における二重位相差の観測値を算出する二重位相差算出処理と、
二重位相差推定部が前記姿勢標定装置の標定した姿勢角の標定値に基づき中央処理装置を用いて複数のGPS受信機における二重位相差の推定値を算出する二重位相差推定処理と、
二重位相差残差計算部が前記二重位相差算出部の算出した複数のGPS受信機における二重位相差の観測値と前記二重位相差推定部の算出した複数のGPS受信機における二重位相差の推定値との差分を中央処理装置を用いて算出する二重位相差残差計算処理と、
補正量算出部が前記二重位相差残差計算部の算出した複数のGPS受信機における二重位相差の観測値と推定値との差分に基づき前記姿勢角計算部の算出した姿勢角の計算値に対する補正量を中央処理装置を用いて算出する補正量算出処理と、
姿勢角標定部が前記補正量算出部の算出した補正量に基づき前記姿勢角計算部の算出した姿勢角の計算値を中央処理装置を用いて補正して姿勢角の標定値を算出する姿勢角標定処理と
を実行することを特徴とする姿勢標定方法。
【請求項7】
請求項6記載の姿勢標定方法をコンピュータに実行させることを特徴とする姿勢標定プログラム。
【請求項1】
ジャイロの測定値を用いて計算した姿勢角の計算値をGPS(Global Positioning System)受信機の観測値に基づいて補正して姿勢角の標定値を算出する姿勢標定装置であり、
前記ジャイロの測定値に基づき中央処理装置を用いて姿勢角の計算値を算出する姿勢角計算部と、
複数のGPS受信機が観測した搬送波位相を入力し中央処理装置を用いて複数のGPS受信機における二重位相差の観測値を算出する二重位相差算出部と、
算出した姿勢角の標定値に基づき中央処理装置を用いて複数のGPS受信機における二重位相差の推定値を算出する二重位相差推定部と、
前記二重位相差算出部が算出した複数のGPS受信機における二重位相差の観測値と前記二重位相差推定部が算出した複数のGPS受信機における二重位相差の推定値との差分を中央処理装置を用いて算出する二重位相差残差計算部と、
前記二重位相差残差計算部が算出した複数のGPS受信機における二重位相差の観測値と推定値との差分に基づき前記姿勢角計算部が算出した姿勢角の計算値に対する補正量を中央処理装置を用いて算出する補正量算出部と、
前記補正量算出部が算出した補正量に基づき前記姿勢角計算部が算出した姿勢角の計算値を中央処理装置を用いて補正して姿勢角の標定値を算出する姿勢角標定部と
を備えたことを特徴とする姿勢標定装置。
【請求項2】
前記二重位相差算出部は、
各GPS受信機が観測した搬送波位相と各GPS受信機における搬送波の受信時刻とに基づいて補間計算を行い同時刻における各GPS受信機の搬送波位相を算出し、算出した各GPS受信機の搬送波位相に基づいて複数のGPS受信機における二重位相差の観測値を算出する
ことを特徴とする請求項1記載の姿勢標定装置。
【請求項3】
前記二重位相差算出部は、
複数のGPS受信機がそれぞれ観測した第1の搬送波位相と第2の搬送波位相とを入力し第1の搬送波位相と第2の搬送波位相とを線形結合計算して各GPS受信機の線形結合した搬送波位相を算出し線形結合した搬送波位相に基づいて複数のGPS受信機における二重位相差の観測値を算出する
ことを特徴とする請求項1〜請求項2いずれかに記載の姿勢標定装置。
【請求項4】
前記二重位相差推定部は、
前記姿勢標定装置が標定した姿勢角の標定値に基づいて複数のGPS受信機における基線ベクトルを算出し、算出した基線ベクトルと搬送波を送信したGPS衛星に対するGPS受信機の方向余弦基底ベクトルとに基づいて複数のGPS受信機における二重位相差の推定値を算出する
ことを特徴とする請求項1〜請求項3いずれかに記載の姿勢標定装置。
【請求項5】
前記二重位相差残差計算部は、
前記二重位相差算出部が算出した二重位相差の観測値と前記二重位相差推定部が算出した二重位相差の推定値との差を算出し、算出した差の小数値を複数のGPS受信機における二重位相差の観測値と推定値との差分とする
ことを特徴とする請求項1〜請求項4いずれかに記載の姿勢標定装置。
【請求項6】
ジャイロの測定値を用いて計算した姿勢角の計算値をGPS(Global Positioning System)受信機の観測値に基づいて補正して姿勢角の標定値を算出する姿勢標定装置の姿勢標定方法であり、
姿勢角計算部がジャイロの測定値に基づき中央処理装置を用いて姿勢角の計算値を算出する姿勢角計算処理と、
二重位相差算出部が各GPS受信機の観測した搬送波位相を入力し中央処理装置を用いて複数のGPS受信機における二重位相差の観測値を算出する二重位相差算出処理と、
二重位相差推定部が前記姿勢標定装置の標定した姿勢角の標定値に基づき中央処理装置を用いて複数のGPS受信機における二重位相差の推定値を算出する二重位相差推定処理と、
二重位相差残差計算部が前記二重位相差算出部の算出した複数のGPS受信機における二重位相差の観測値と前記二重位相差推定部の算出した複数のGPS受信機における二重位相差の推定値との差分を中央処理装置を用いて算出する二重位相差残差計算処理と、
補正量算出部が前記二重位相差残差計算部の算出した複数のGPS受信機における二重位相差の観測値と推定値との差分に基づき前記姿勢角計算部の算出した姿勢角の計算値に対する補正量を中央処理装置を用いて算出する補正量算出処理と、
姿勢角標定部が前記補正量算出部の算出した補正量に基づき前記姿勢角計算部の算出した姿勢角の計算値を中央処理装置を用いて補正して姿勢角の標定値を算出する姿勢角標定処理と
を実行することを特徴とする姿勢標定方法。
【請求項7】
請求項6記載の姿勢標定方法をコンピュータに実行させることを特徴とする姿勢標定プログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2007−163335(P2007−163335A)
【公開日】平成19年6月28日(2007.6.28)
【国際特許分類】
【出願番号】特願2005−361369(P2005−361369)
【出願日】平成17年12月15日(2005.12.15)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成19年6月28日(2007.6.28)
【国際特許分類】
【出願日】平成17年12月15日(2005.12.15)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]