
姿勢状態評価装置、及び姿勢状態評価方法
【課題】組み付け状態の転がり軸受又はその各構成部品等の測定対象物を治具に対し固定保持する際の姿勢状態を、導入コストを抑えて容易且つ正確に評価して、品質評価に関する測定可否を事前に判定することができる姿勢状態評価装置、及び姿勢状態評価方法を提供する。
【解決手段】固定保持された転がり軸受10の姿勢状態を評価する際、転がり軸受10の回転周波数の整数倍に対応する、振動データの周波数成分を抽出して(ステップS6)、この周波数成分と、事前に設定される閾値と、を比較し(ステップS7)、この比較結果に基づき姿勢状態を判定する(ステップS8)。これにより、任意の回転数であっても転がり軸受10の姿勢判定を容易且つ正確に行うことができる。
【解決手段】固定保持された転がり軸受10の姿勢状態を評価する際、転がり軸受10の回転周波数の整数倍に対応する、振動データの周波数成分を抽出して(ステップS6)、この周波数成分と、事前に設定される閾値と、を比較し(ステップS7)、この比較結果に基づき姿勢状態を判定する(ステップS8)。これにより、任意の回転数であっても転がり軸受10の姿勢判定を容易且つ正確に行うことができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、転がり軸受又はその各構成部品等の測定対象物について品質評価が行われる前に、治具に固定された測定対象物の姿勢状態を評価するための姿勢状態評価装置、及び姿勢状態評価方法に関する。
【背景技術】
【0002】
通常、転がり軸受は、外周面に内輪軌道を有する内輪と、内周面に外輪軌道を有する外輪と、これら内輪軌道と外輪軌道の間に転動自在に配設され、保持器によって転動自在に保持される複数の転動体と、を有する。
【0003】
このような転がり軸受は、生産工程の最終段階で品質評価が行われる。この品質評価では、転がり軸受の構成部品である内輪、外輪、転動体等の表面形状(うねり)、損傷、粗さ、振動特性等が評価される。また、このとき、保持器やシール部材等を含む部品の損傷、粉塵等も評価される。
【0004】
また、このような品質評価において、転がり軸受の振動性能を評価しようとする場合には、振動測定装置等が用いられる(例えば、特許文献1参照)。この種の装置では、転がり軸受等の測定対象物を回転駆動手段に対し治具を用いて固定保持し、この回転駆動手段により測定対象物を回転し、この回転状態の測定対象物の振動を測定することにより、測定対象物の品質評価を行っている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007―93544号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、治具による測定対象物の固定保持が不適切である場合、例えば測定対象物が治具に対して斜めに組み付いてしまい、姿勢が悪い状態で品質評価が行われてしまう可能性がある。このような状態で測定対象物の振動性能や表面形状等の評価を行った場合、正確な品質評価を行うことができない虞がある。また、完成品の状態とする前の転がり軸受の各構成部品(内輪、外輪等)について、それぞれ個別に品質評価を行う際も同様である。
【0007】
本発明は、前述の事情に鑑みてなされたものであり、その目的は、転がり軸受又はその各構成部品等の測定対象物を治具に対し固定保持する際の姿勢状態を、導入コストを抑えて容易且つ正確に評価して、品質評価に関する測定可否を事前に判定することができる姿勢状態評価装置、及び姿勢状態評価方法を提供することにある。
【課題を解決するための手段】
【0008】
本発明の上記目的は、下記の構成により達成される。
(1) 測定対象物を固定保持する治具と、
前記治具を介して前記測定対象物を回転させる回転駆動部と、
を備え、
前記測定対象物が前記回転駆動部によって回転された状態で品質評価が行われる前に、前記治具に固定保持された前記測定対象物の姿勢状態を評価する姿勢状態評価装置であって、
前記測定対象物の物理量を測定する物理量測定センサと、
前記測定対象物の回転周波数を測定する回転周波数測定センサと、
前記物理量測定センサが出力する物理量データに対し特定周波数帯を抽出するフィルタ処理部と、
前記フィルタ処理部が出力する特定周波数帯が抽出された前記物理量データに対し周波数分析する周波数分析部と、
前記周波数分析部が出力する分析結果に対し、前記回転周波数測定センサが出力する回転周波数の整数倍に対応する周波数成分を抽出する周波数成分抽出部と、
前記周波数成分抽出部が出力する周波数成分と、事前に設定される閾値と、を比較する閾値比較部と、
前記閾値比較部が出力する比較結果に基づき前記測定対象物の前記姿勢状態を判定する姿勢状態判定部と、
を備えることを特徴とする姿勢状態評価装置。
(2) 測定対象物を固定保持する治具と、
前記治具を介して前記測定対象物を回転させる回転駆動部と、
を備え、
前記測定対象物が前記回転駆動部によって回転された状態で品質評価が行われる前に、前記治具に固定保持された前記測定対象物の姿勢状態を評価する姿勢状態評価装置であって、
前記測定対象物の物理量を測定する物理量測定センサと、
前記物理量測定センサが出力する物理量データを増幅する増幅器と、
前記増幅器が出力する前記物理量データに対し特定周波数帯を抽出するフィルタ処理部と、
前記フィルタ処理部が出力する特定周波数帯が抽出された前記物理量データの包絡線を検出し、該包絡線の振幅を求める包絡線検波部と、
前記包絡線検波部が出力する前記包絡線の振幅と、事前に設定される閾値と、を比較する閾値比較部と、
前記閾値比較部が出力する比較結果に基づき前記測定対象物の前記姿勢状態を判定する姿勢状態判定部と、
を備えることを特徴とする姿勢状態評価装置。
(3) 測定対象物を固定保持する治具と、
前記治具を介して前記測定対象物を回転させる回転駆動部と、
を備え、
前記測定対象物が前記回転駆動部によって回転された状態で品質評価が行われる前に、前記治具に固定保持された前記測定対象物の姿勢状態を評価する姿勢状態評価方法であって、
前記測定対象物を回転する回転ステップと、
前記回転ステップにより回転された状態の前記測定対象物の物理量を測定する物理量測定ステップと、
前記回転ステップにより回転された状態の前記測定対象物の回転周波数を検出する回転周波数検出ステップと、
前記物理量測定ステップで測定された物理量データに対し特定周波数帯を抽出するフィルタ処理ステップと、
前記フィルタ処理ステップにより特定周波数帯が抽出された前記物理量データを周波数分析する周波数分析ステップと、
前記周波数分析ステップで得られる分析結果に対し、前記回転周波数検出ステップで得られる回転周波数の整数倍に対応する周波数成分を抽出する周波数成分抽出ステップと、
前記周波数成分抽出ステップで得られた周波数成分と、事前に設定された閾値と、を比較する閾値比較ステップと、
前記閾値比較ステップの比較結果に基づき前記測定対象物の前記姿勢状態を判定する姿勢状態判定ステップと、
を備えることを特徴とする姿勢状態評価方法。
(4) 測定対象物を固定保持する治具と、
前記治具を介して前記測定対象物を回転させる回転駆動部と、
を備え、
前記測定対象物が前記回転駆動部によって回転された状態で品質評価が行われる前に、固定保持された前記測定対象物の姿勢状態を評価する姿勢状態評価方法であって、
前記測定対象物を回転する回転ステップと、
前記回転ステップにより回転された状態の前記測定対象物の物理量を測定する物理量測定ステップと、
前記物理量測定ステップで測定された物理量データを増幅する増幅ステップと、
前記増幅ステップで増幅された前記物理量データに対し特定周波数帯を抽出するフィルタ処理ステップと、
前記フィルタ処理ステップにより特定周波数帯が抽出された前記物理量データの包絡線を検出し、該包絡線の振幅を求める包絡線検波ステップと、
前記包絡線検波ステップにより求められた前記包絡線の振幅と、事前に設定された閾値と、を比較する閾値比較ステップと、
前記閾値比較ステップの比較結果に基づき前記測定対象物の前記姿勢状態を判定する姿勢状態判定ステップと、
を備えることを特徴とする姿勢状態評価方法。
【発明の効果】
【0009】
本発明によれば、固定保持された測定対象物の姿勢状態を評価する際、測定対象物の回転周波数の整数倍に対応する、物理量データの周波数成分を抽出して、この周波数成分と、事前に設定される閾値と、を比較し、この比較結果に基づき測定対象物の姿勢状態を判定する。
【0010】
また、本発明によれば、固定保持された測定対象物の姿勢状態を評価する際、測定対象物の物理量データの包絡線を検出し、当該包絡線の振幅を求める。そして、包絡線の振幅と、事前に設定される閾値と、を比較し、この比較結果に基づき測定対象物の姿勢状態を判定する。
【0011】
従って、本発明によれば、任意の回転数であっても測定対象物の姿勢判定を容易且つ正確に行うことができる。また、本発明は既存の品質評価装置にプログラムを追加するだけで実現可能であり、ハードウエア資源のそのままの利用、及びソフトウエア資源の微小な改変で用いることができるため、導入コストを抑えることができる。
【図面の簡単な説明】
【0012】
【図1】本発明に係る姿勢状態評価装置の第1実施形態を説明するためのブロック図である。
【図2】本発明に係る第1実施形態の治具に転がり軸受が取り付けられた状態を示す斜視図である。
【図3】本発明に係る第1実施形態の治具に転がり軸受を取り付ける方法を説明するための斜視図である。
【図4】図1に示すブロック図を説明するための姿勢状態評価フロー図である。
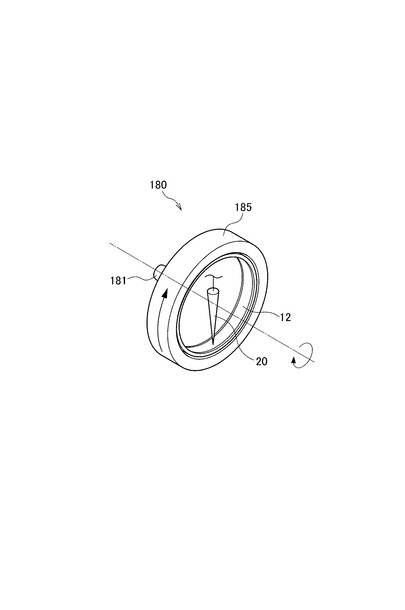
【図5】第2実施形態の治具に転がり軸受が取り付けられた状態を示す斜視図である。
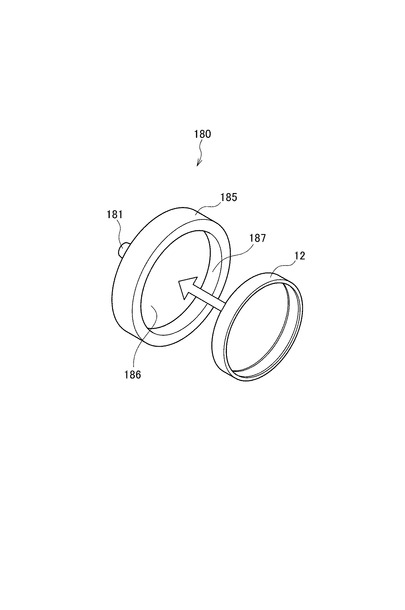
【図6】第2実施形態の治具に転がり軸受を取り付ける方法を説明するための斜視図である。
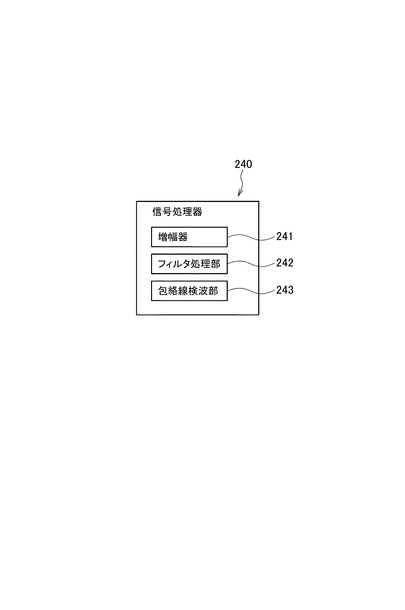
【図7】第3実施形態の信号処理器の構成を説明するためのブロック図である。
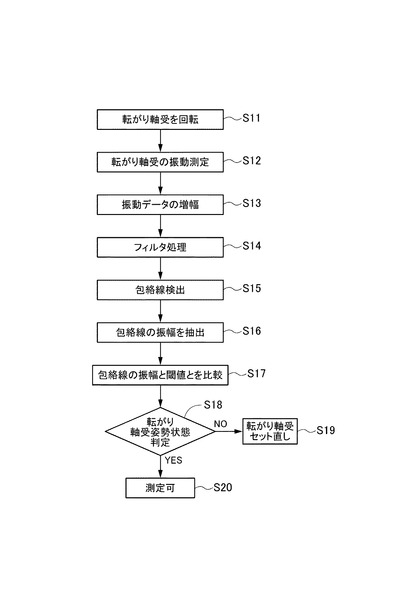
【図8】図7に示すブロック図を説明するための姿勢状態評価のフロー図である。
【図9】図8に示すフロー図を説明するための分析結果データ図である。
【発明を実施するための形態】
【0013】
以下、本発明に係る姿勢状態評価装置、及び姿勢状態評価方法の実施形態について、図面を参照しながら詳細に説明する。
【0014】
(第1実施形態)
本実施形態の姿勢状態評価装置、及び姿勢状態評価方法は、転がり軸受(測定対象物)品質評価が行われる前に、治具に固定保持された転がり軸受の姿勢状態を評価するものである。
【0015】
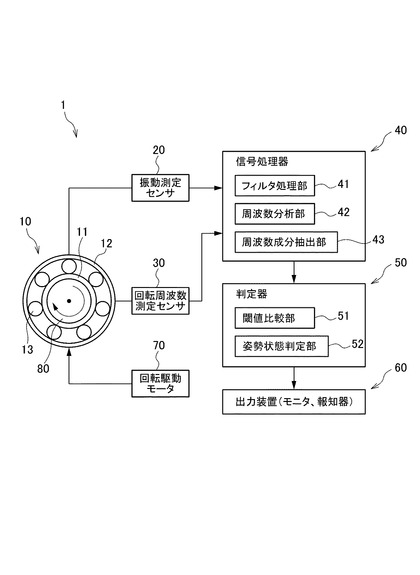
図1に示すように、本実施形態の姿勢状態評価装置1は、測定対象物である転がり軸受10を固定保持する治具80と、治具80の回転軸部81(後述)に接続され、当該治具80を介して転がり軸受10を回転させる回転駆動モータ(回転駆動部)70と、転がり軸受10の振動(物理量)を測定する振動測定センサ(物理量測定センサ)20と、転がり軸受10の回転周波数を計測する回転周波数測定センサ30と、これら振動測定センサ20及び回転周波数測定センサ30から測定される電気信号を信号処理する信号処理器40と、信号処理器40より信号処理される結果を受け取り、転がり軸受10の姿勢を判定する判定器50と、判定器50の判定結果を外部に出力する出力装置60と、を備える。
【0016】
図1〜3に示すように、転がり軸受10は、外周面に内輪軌道を有する内輪11と、内周面に外輪軌道を有する外輪12と、これら内輪軌道と外輪軌道の間に保持器(不図示)によって転動自在に配設される複数の玉(転動体)13と、を有する。
【0017】
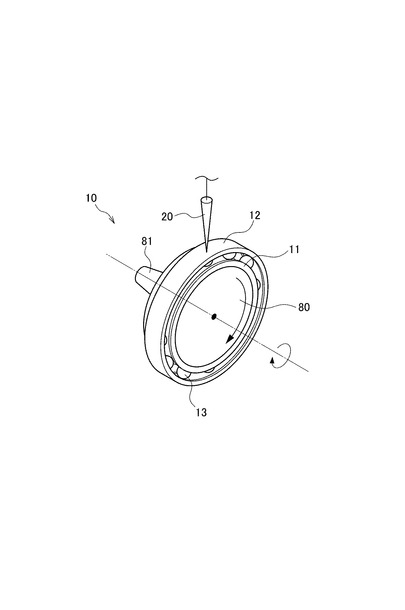
治具80は、図3に示すように、回転軸部81と、この回転軸部81の一端部に設けられる段付円柱部82と、を有する。段付円柱部82は、大径円柱部83及び小径円柱部84が同軸上に一体形成されることにより構成されており、転がり軸受10の内輪11が、小径円柱部84の外周面84aに嵌挿されて固定保持される(図2参照)。
【0018】
また、回転駆動モータ70は、治具80の回転軸部81の他端部で減速機等を介して接続され、治具80に回転駆動モータ70の回転トルクが伝達されるように構成される。したがって、回転駆動モータ70が回転することにより、治具80を介して転がり軸受10が回転される。
【0019】
図2に示すように、振動測定センサ(物理量測定センサ)20は、接触式センサであり、その先端部が、触子形状に形成され転がり軸受10の外輪12の外周面に接触するように配設される。そして、振動測定センサ20は、転がり軸受10の内輪11回転時における外輪12の外周面の表面振動を測定する。
なお、振動測定センサ20は、加速度、速度、変位等、振動を電気信号に変換できるものであれば良く、非接触のレーザ式等、種々のものを適宜採用することができる。また、本実施形態では、センサにより検出される物理量を振動としたが、これに限らず、その他種々のセンサを用いることによって、例えば超音波等、他の物理量を採用しても良い。
【0020】
回転周波数測定センサ30は、ロータリーエンコーダ等のセンサからなり、回転駆動モータ70と同様に治具80の回転軸部81に接続され、この回転軸部81の回転数を測定することにより転がり軸受10の回転周波数を検出する。
【0021】
信号処理器40は、フィルタ処理部41と、周波数分析部42と、周波数成分抽出部43と、を有する。フィルタ処理部41は、例えばノイズを除去するローパスフィルタ或いはバンドパスフィルタ等により構成され、振動測定センサ20から出力される振動データに対し特定周波数帯域のみを抽出して出力する。周波数分析部42は、フィルタ処理部41が出力する振動データに対し周波数分析(FFT)する。周波数成分抽出部43は、周波数分析部42が出力する分析結果に対し、回転周波数測定センサ30が出力する回転周波数の整数倍(例えば、1,2,3,・・・)に対応する周波数成分を抽出する。
なお、周波数成分抽出部43が回転周波数の整数倍の周波数成分を抽出する際の、整数倍の範囲は、測定する周波数の上限を超えない範囲において任意に設定すれば良い。
【0022】
また、判定器50は、閾値比較部51と、姿勢状態判定部52と、を有する。閾値比較部51は、事前に設定される閾値を例えば記録保持回路(ROM:不図示)等から読み出し、周波数成分抽出部43が出力する周波数成分と、この閾値と、を比較する。姿勢状態判定部52は、閾値比較部51が出力する比較結果に基づき転がり軸受10が正しい姿勢状態にあるかを判定する。そして、判定器50は姿勢状態判定部52の判定結果を、モニタや報知器等からなる出力装置60に出力し、この出力装置60は、判定結果を外部に報知する。
【0023】
なお、信号処理器40及び判定器50では処理の大部分をソフトウエアにて行っているが、同様な機能が実現できれば、その一部又は全部をFPGA(Field Programable Gate Array)などのハードウエアで実現しても良いし、又はその一部又は全部をアナログ電子回路等で適宜実現しても良い。
【0024】
次に、図4を参照しながら、本実施形態の姿勢状態評価装置1で行われる姿勢状態評価のフローについて説明する。
【0025】
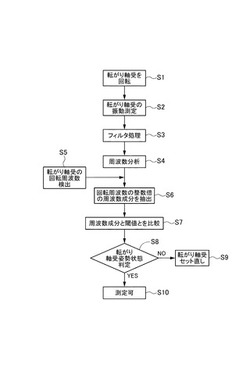
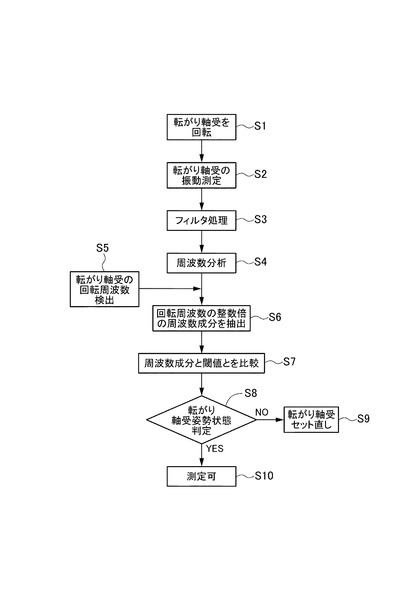
まず、ステップS1で、回転駆動モータ70は、治具80に固定保持された転がり軸受10を回転させる(回転ステップ)。次に、ステップS2に進み、振動測定センサ20は回転された状態の転がり軸受10の振動を測定する{振動(物理量)測定ステップ}。その後、ステップS3,S4に進み、フィルタ処理部41は振動測定センサ20により出力された振動データをフィルタ処理し(フィルタ処理ステップ)、更に周波数分析部42はこのフィルタ処理された振動データを周波数分析(FFT)する(周波数分析ステップ)。
【0026】
一方、ステップS5で、回転周波数測定センサ30は、測定した転がり軸受10の回転数に基づきその回転周波数を検出する(回転周波数検出ステップ)。そして、ステップS6で、周波数成分抽出部43は、ステップS4で得られる周波数分析結果に対し、ステップS5で検出された回転周波数の整数倍に対応する周波数成分を抽出する(周波数成分抽出ステップ)。その後、閾値比較部51は、この周波数成分と、事前に設定された閾値と、を比較し(ステップS7:閾値比較ステップ)、姿勢状態判定部52はこの比較結果に基づき転がり軸受10の姿勢状態を判定する(ステップS8:姿勢状態判定ステップ)。
【0027】
そして、姿勢状態判定部52が、周波数成分が閾値より大きいと判断する場合にはステップS8のNOに進み、出力装置60は「転がり軸受のセット直し」と外部に報知する(ステップS9)。逆に、姿勢状態判定部52が、周波数成分が閾値より小さいと判断する場合にはステップS8のYESに進み、出力装置60は「測定可」と外部に報知する(ステップS10)。その後、良好な姿勢状態が確保された転がり軸受10は、公知の方法で損傷等の品質評価が行われる。なお、この品質評価においては、本発明の姿勢状態評価方法で得られた測定データを用いて行っても良い。
【0028】
以上説明したように、本実施形態の姿勢状態評価装置、及び姿勢状態評価方法によれば、治具80に固定保持された転がり軸受10の姿勢状態を評価する際、転がり軸受10の回転周波数の整数倍に対応する、振動データの周波数成分を抽出して、この周波数成分と、事前に設定される閾値と、を比較し、この比較結果に基づき姿勢状態を判定する。これにより、任意の回転数であっても転がり軸受10の姿勢判定を容易且つ正確に行うことができる。
【0029】
また、本実施形態は既存の品質評価装置にプログラムを追加するだけで実現可能であり、ハードウエア資源のそのままの利用、及びソフトウエア資源の微小な改変で用いることができるため、導入コストを抑えることができる。例えば、転がり軸受の品質評価に一般的に用いられているアンデロンメータを使用して転がり軸受10の振動性能の品質評価を行う前に、当該アンデロンメータの、センサ、治具等のハードウエア資源をそのまま用いて、転がり軸受の姿勢判定を行うことができる。
【0030】
(第2実施形態)
次に、本発明の第2実施形態に係る姿勢状態評価装置、及び姿勢状態評価方法について図面を参照しながら説明する。
なお、本実施形態の姿勢状態評価装置は、第1実施形態と基本的構成を同一とし、測定対象物及び治具の構成が異なるのみであるため、第1実施形態との相異点を中心に説明し、第1実施形態と同一又は同等部分については、図面に同一或いは同等符号を付してその説明を省略或いは簡略化する。
【0031】
本実施形態では、図5に示すように、測定対象物を、完成品の転がり軸受10ではなく、転がり軸受10の構成部品である外輪12としている。
【0032】
また、本実施形態の治具180は、図6に示すように、回転軸部181と、この回転軸部181の一端部に接続された底部186を備える有底円筒状の円筒部185と、を有する。そして、円筒部185の内周面187に、転がり軸受10の外輪12が嵌挿されて固定保持される(図5参照)。
【0033】
振動測定センサ20は、治具180に固定保持された外輪12の内周面(外輪軌道面)に、その先端部が接触するように配設される。そして、第1実施形態と同様の方法によって、外輪12の回転時の表面振動を測定し、外輪12の姿勢状態を評価する。
【0034】
なお、本実施形態における測定対象物としては、転がり軸受10の外輪12に限定されず、内輪11や転動体13等であってもよい。例えば、測定対象物を内輪11とした場合、振動測定センサ20はその先端部が内輪11の外周面(内輪軌道面)に接触するように配設され、測定対象物を転動体13とした場合、振動測定センサ20はその先端部が転動体13の転動面に接触するように配設される。
【0035】
なお、本実施形態の姿勢状態評価装置は、例えば、転がり軸受の構成部品の品質評価に一般的に用いられているウェービメータ(転がり軸受の内外輪の軌道面、及び転動体の転動面のうねりを測定する装置)を使用して転がり軸受の構成部品の品質評価を行う前に、当該ウェービメータの、センサ、治具等のハードウエア資源をそのまま用いることによって実現可能である。したがって、上記第1実施形態と同様に、本実施形態でも導入コストを抑えることができる。
その他の作用、効果については第1実施形態と同様である。
【0036】
(第3実施形態)
次に、本発明の第3実施形態に係る姿勢状態評価装置、及び姿勢状態評価方法について図面を参照しながら説明する。
本実施形態の姿勢状態評価装置は、上記実施形態と基本的構成を同一とし、信号処理器の構成が相違するので、上記実施形態と同一又は相当部分については図面に同一或いは相当符号を付すことで説明を省略或いは簡略化し、相違部分を中心に説明する。
【0037】
図7に示すように、本実施形態の信号処理器240は、増幅器241と、フィルタ処理部242と、包絡線検波部243と、を有する。増幅器241は、振動測定センサ20が出力する測定対象物の振動データを増幅する。フィルタ処理部242は、例えばノイズを除去するローパスフィルタ或いはバンドパスフィルタ等により構成され、増幅器241が出力する振動データに対し特定周波数帯を抽出する。包絡線検波部243は、フィルタ処理部242が出力する特定周波数が抽出された振動データに対し包絡線検波処理をし、振動データの包絡線を検出し、その包絡線の振幅を求め、この振幅の値を閾値比較部51に出力する。
【0038】
閾値比較部51は、包絡線検波部243から出力された包絡線の振幅と、事前に設定される閾値と、を比較する。また、姿勢状態判定部52は、閾値比較部51が出力する比較結果に基づき転がり軸受10が正しい姿勢状態にあるかを判定する。そして、判定器50は姿勢状態判定部52の判定結果を、モニタや報知器等からなる出力装置60に出力し、出力装置60は、判定結果を外部に報知する。
その他の構成については、上述の実施形態と同様である。
【0039】
次に、図8を参照しながら、本実施形態の姿勢状態評価装置で行われる姿勢状態評価のフローについて説明する。
【0040】
まず、ステップS11で、回転駆動モータ70は治具80に固定保持された転がり軸受10を、治具80を介して回転する(回転ステップ)。次に、ステップS12に進み、振動測定センサ20は回転された状態の転がり軸受10の振動を測定する{振動(物理量)測定ステップ}。その後、ステップS13に進み、増幅器241は振動センサ20により出力された振動データを増幅する{増幅ステップ:図9(A)参照}。そして、ステップS14に進み、フィルタ処理部242はこの増幅器241により出力された振動データをフィルタ処理する{フィルタ処理ステップ:図9(B)参照}。そして、ステップS15,S16で、包絡線検波部243は、このフィルタ処理された振動データの包絡線を検出し、包絡線の振幅を抽出する{包絡線検波ステップ:図9(C)参照}。
【0041】
更に、ステップS17で、閾値比較部51は、包絡線の振幅と、事前に設定された閾値と、を比較し(閾値比較ステップ)、ステップS18で、姿勢状態判定部52はこの比較結果に基づき転がり軸受10の姿勢状態を判定する(姿勢状態判定ステップ)。
【0042】
そして、姿勢状態判定部52が、包絡線の振幅が閾値より大きいと判断する場合にはステップS18のNOに進み、出力装置60は「転がり軸受のセット直し」と外部に報知する(ステップS19)。逆に、姿勢状態判定部52が、周波数成分が閾値より小さいと判断する場合にはステップS18のYESに進み、出力装置60は「測定可」と外部に報知する(ステップS20)。
【0043】
以上、本実施形態によれば、固定保持された転がり軸受10の姿勢状態を評価する際、転がり軸受10の振動データの包絡線を検出し、包絡線の振幅と、事前に設定される閾値と、を比較し、この比較結果に基づき姿勢状態を判定する。これにより、任意の回転数であっても転がり軸受10の姿勢判定を容易且つ正確に行うことができる。
その他の構成及び作用効果については、上記第1実施形態と同様である。
【0044】
なお、本発明は前述の実施形態に例示したものに限定されるものではなく、本発明の要旨を逸脱しない範囲において適宜変更可能である。
例えば、上述の実施形態において、回転周波数測定センサ30はロータリーエンコーダであるとしたが、これに限らず、位相同期回路(PLL)を採用し、実回転数との誤差をサーボ制御して、回転周波数が常に基準発振器と同期するように構成しても良い。
【符号の説明】
【0045】
1 姿勢状態評価装置
10 転がり軸受(測定対象物)
11 内輪
12 外輪(測定対象物)
13 玉(転動体)
20 振動測定センサ(物理量測定センサ)
30 回転周波数測定センサ
40 信号処理器
41 フィルタ処理部
42 周波数分析部
43 周波数成分抽出部
50 判定器
51 閾値比較部
52 姿勢状態判定部
60 出力装置
70 回転駆動モータ(回転駆動部)
80 治具
81 回転軸部
82 段付円柱部
83 大径円柱部
84 小径円柱部
84a 外周面
180 治具
181 回転軸部
185 円筒部
186 底部
187 内周面
240 信号処理器
241 増幅器
242 フィルタ処理部
243 包絡線検波部
【技術分野】
【0001】
本発明は、転がり軸受又はその各構成部品等の測定対象物について品質評価が行われる前に、治具に固定された測定対象物の姿勢状態を評価するための姿勢状態評価装置、及び姿勢状態評価方法に関する。
【背景技術】
【0002】
通常、転がり軸受は、外周面に内輪軌道を有する内輪と、内周面に外輪軌道を有する外輪と、これら内輪軌道と外輪軌道の間に転動自在に配設され、保持器によって転動自在に保持される複数の転動体と、を有する。
【0003】
このような転がり軸受は、生産工程の最終段階で品質評価が行われる。この品質評価では、転がり軸受の構成部品である内輪、外輪、転動体等の表面形状(うねり)、損傷、粗さ、振動特性等が評価される。また、このとき、保持器やシール部材等を含む部品の損傷、粉塵等も評価される。
【0004】
また、このような品質評価において、転がり軸受の振動性能を評価しようとする場合には、振動測定装置等が用いられる(例えば、特許文献1参照)。この種の装置では、転がり軸受等の測定対象物を回転駆動手段に対し治具を用いて固定保持し、この回転駆動手段により測定対象物を回転し、この回転状態の測定対象物の振動を測定することにより、測定対象物の品質評価を行っている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2007―93544号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、治具による測定対象物の固定保持が不適切である場合、例えば測定対象物が治具に対して斜めに組み付いてしまい、姿勢が悪い状態で品質評価が行われてしまう可能性がある。このような状態で測定対象物の振動性能や表面形状等の評価を行った場合、正確な品質評価を行うことができない虞がある。また、完成品の状態とする前の転がり軸受の各構成部品(内輪、外輪等)について、それぞれ個別に品質評価を行う際も同様である。
【0007】
本発明は、前述の事情に鑑みてなされたものであり、その目的は、転がり軸受又はその各構成部品等の測定対象物を治具に対し固定保持する際の姿勢状態を、導入コストを抑えて容易且つ正確に評価して、品質評価に関する測定可否を事前に判定することができる姿勢状態評価装置、及び姿勢状態評価方法を提供することにある。
【課題を解決するための手段】
【0008】
本発明の上記目的は、下記の構成により達成される。
(1) 測定対象物を固定保持する治具と、
前記治具を介して前記測定対象物を回転させる回転駆動部と、
を備え、
前記測定対象物が前記回転駆動部によって回転された状態で品質評価が行われる前に、前記治具に固定保持された前記測定対象物の姿勢状態を評価する姿勢状態評価装置であって、
前記測定対象物の物理量を測定する物理量測定センサと、
前記測定対象物の回転周波数を測定する回転周波数測定センサと、
前記物理量測定センサが出力する物理量データに対し特定周波数帯を抽出するフィルタ処理部と、
前記フィルタ処理部が出力する特定周波数帯が抽出された前記物理量データに対し周波数分析する周波数分析部と、
前記周波数分析部が出力する分析結果に対し、前記回転周波数測定センサが出力する回転周波数の整数倍に対応する周波数成分を抽出する周波数成分抽出部と、
前記周波数成分抽出部が出力する周波数成分と、事前に設定される閾値と、を比較する閾値比較部と、
前記閾値比較部が出力する比較結果に基づき前記測定対象物の前記姿勢状態を判定する姿勢状態判定部と、
を備えることを特徴とする姿勢状態評価装置。
(2) 測定対象物を固定保持する治具と、
前記治具を介して前記測定対象物を回転させる回転駆動部と、
を備え、
前記測定対象物が前記回転駆動部によって回転された状態で品質評価が行われる前に、前記治具に固定保持された前記測定対象物の姿勢状態を評価する姿勢状態評価装置であって、
前記測定対象物の物理量を測定する物理量測定センサと、
前記物理量測定センサが出力する物理量データを増幅する増幅器と、
前記増幅器が出力する前記物理量データに対し特定周波数帯を抽出するフィルタ処理部と、
前記フィルタ処理部が出力する特定周波数帯が抽出された前記物理量データの包絡線を検出し、該包絡線の振幅を求める包絡線検波部と、
前記包絡線検波部が出力する前記包絡線の振幅と、事前に設定される閾値と、を比較する閾値比較部と、
前記閾値比較部が出力する比較結果に基づき前記測定対象物の前記姿勢状態を判定する姿勢状態判定部と、
を備えることを特徴とする姿勢状態評価装置。
(3) 測定対象物を固定保持する治具と、
前記治具を介して前記測定対象物を回転させる回転駆動部と、
を備え、
前記測定対象物が前記回転駆動部によって回転された状態で品質評価が行われる前に、前記治具に固定保持された前記測定対象物の姿勢状態を評価する姿勢状態評価方法であって、
前記測定対象物を回転する回転ステップと、
前記回転ステップにより回転された状態の前記測定対象物の物理量を測定する物理量測定ステップと、
前記回転ステップにより回転された状態の前記測定対象物の回転周波数を検出する回転周波数検出ステップと、
前記物理量測定ステップで測定された物理量データに対し特定周波数帯を抽出するフィルタ処理ステップと、
前記フィルタ処理ステップにより特定周波数帯が抽出された前記物理量データを周波数分析する周波数分析ステップと、
前記周波数分析ステップで得られる分析結果に対し、前記回転周波数検出ステップで得られる回転周波数の整数倍に対応する周波数成分を抽出する周波数成分抽出ステップと、
前記周波数成分抽出ステップで得られた周波数成分と、事前に設定された閾値と、を比較する閾値比較ステップと、
前記閾値比較ステップの比較結果に基づき前記測定対象物の前記姿勢状態を判定する姿勢状態判定ステップと、
を備えることを特徴とする姿勢状態評価方法。
(4) 測定対象物を固定保持する治具と、
前記治具を介して前記測定対象物を回転させる回転駆動部と、
を備え、
前記測定対象物が前記回転駆動部によって回転された状態で品質評価が行われる前に、固定保持された前記測定対象物の姿勢状態を評価する姿勢状態評価方法であって、
前記測定対象物を回転する回転ステップと、
前記回転ステップにより回転された状態の前記測定対象物の物理量を測定する物理量測定ステップと、
前記物理量測定ステップで測定された物理量データを増幅する増幅ステップと、
前記増幅ステップで増幅された前記物理量データに対し特定周波数帯を抽出するフィルタ処理ステップと、
前記フィルタ処理ステップにより特定周波数帯が抽出された前記物理量データの包絡線を検出し、該包絡線の振幅を求める包絡線検波ステップと、
前記包絡線検波ステップにより求められた前記包絡線の振幅と、事前に設定された閾値と、を比較する閾値比較ステップと、
前記閾値比較ステップの比較結果に基づき前記測定対象物の前記姿勢状態を判定する姿勢状態判定ステップと、
を備えることを特徴とする姿勢状態評価方法。
【発明の効果】
【0009】
本発明によれば、固定保持された測定対象物の姿勢状態を評価する際、測定対象物の回転周波数の整数倍に対応する、物理量データの周波数成分を抽出して、この周波数成分と、事前に設定される閾値と、を比較し、この比較結果に基づき測定対象物の姿勢状態を判定する。
【0010】
また、本発明によれば、固定保持された測定対象物の姿勢状態を評価する際、測定対象物の物理量データの包絡線を検出し、当該包絡線の振幅を求める。そして、包絡線の振幅と、事前に設定される閾値と、を比較し、この比較結果に基づき測定対象物の姿勢状態を判定する。
【0011】
従って、本発明によれば、任意の回転数であっても測定対象物の姿勢判定を容易且つ正確に行うことができる。また、本発明は既存の品質評価装置にプログラムを追加するだけで実現可能であり、ハードウエア資源のそのままの利用、及びソフトウエア資源の微小な改変で用いることができるため、導入コストを抑えることができる。
【図面の簡単な説明】
【0012】
【図1】本発明に係る姿勢状態評価装置の第1実施形態を説明するためのブロック図である。
【図2】本発明に係る第1実施形態の治具に転がり軸受が取り付けられた状態を示す斜視図である。
【図3】本発明に係る第1実施形態の治具に転がり軸受を取り付ける方法を説明するための斜視図である。
【図4】図1に示すブロック図を説明するための姿勢状態評価フロー図である。
【図5】第2実施形態の治具に転がり軸受が取り付けられた状態を示す斜視図である。
【図6】第2実施形態の治具に転がり軸受を取り付ける方法を説明するための斜視図である。
【図7】第3実施形態の信号処理器の構成を説明するためのブロック図である。
【図8】図7に示すブロック図を説明するための姿勢状態評価のフロー図である。
【図9】図8に示すフロー図を説明するための分析結果データ図である。
【発明を実施するための形態】
【0013】
以下、本発明に係る姿勢状態評価装置、及び姿勢状態評価方法の実施形態について、図面を参照しながら詳細に説明する。
【0014】
(第1実施形態)
本実施形態の姿勢状態評価装置、及び姿勢状態評価方法は、転がり軸受(測定対象物)品質評価が行われる前に、治具に固定保持された転がり軸受の姿勢状態を評価するものである。
【0015】
図1に示すように、本実施形態の姿勢状態評価装置1は、測定対象物である転がり軸受10を固定保持する治具80と、治具80の回転軸部81(後述)に接続され、当該治具80を介して転がり軸受10を回転させる回転駆動モータ(回転駆動部)70と、転がり軸受10の振動(物理量)を測定する振動測定センサ(物理量測定センサ)20と、転がり軸受10の回転周波数を計測する回転周波数測定センサ30と、これら振動測定センサ20及び回転周波数測定センサ30から測定される電気信号を信号処理する信号処理器40と、信号処理器40より信号処理される結果を受け取り、転がり軸受10の姿勢を判定する判定器50と、判定器50の判定結果を外部に出力する出力装置60と、を備える。
【0016】
図1〜3に示すように、転がり軸受10は、外周面に内輪軌道を有する内輪11と、内周面に外輪軌道を有する外輪12と、これら内輪軌道と外輪軌道の間に保持器(不図示)によって転動自在に配設される複数の玉(転動体)13と、を有する。
【0017】
治具80は、図3に示すように、回転軸部81と、この回転軸部81の一端部に設けられる段付円柱部82と、を有する。段付円柱部82は、大径円柱部83及び小径円柱部84が同軸上に一体形成されることにより構成されており、転がり軸受10の内輪11が、小径円柱部84の外周面84aに嵌挿されて固定保持される(図2参照)。
【0018】
また、回転駆動モータ70は、治具80の回転軸部81の他端部で減速機等を介して接続され、治具80に回転駆動モータ70の回転トルクが伝達されるように構成される。したがって、回転駆動モータ70が回転することにより、治具80を介して転がり軸受10が回転される。
【0019】
図2に示すように、振動測定センサ(物理量測定センサ)20は、接触式センサであり、その先端部が、触子形状に形成され転がり軸受10の外輪12の外周面に接触するように配設される。そして、振動測定センサ20は、転がり軸受10の内輪11回転時における外輪12の外周面の表面振動を測定する。
なお、振動測定センサ20は、加速度、速度、変位等、振動を電気信号に変換できるものであれば良く、非接触のレーザ式等、種々のものを適宜採用することができる。また、本実施形態では、センサにより検出される物理量を振動としたが、これに限らず、その他種々のセンサを用いることによって、例えば超音波等、他の物理量を採用しても良い。
【0020】
回転周波数測定センサ30は、ロータリーエンコーダ等のセンサからなり、回転駆動モータ70と同様に治具80の回転軸部81に接続され、この回転軸部81の回転数を測定することにより転がり軸受10の回転周波数を検出する。
【0021】
信号処理器40は、フィルタ処理部41と、周波数分析部42と、周波数成分抽出部43と、を有する。フィルタ処理部41は、例えばノイズを除去するローパスフィルタ或いはバンドパスフィルタ等により構成され、振動測定センサ20から出力される振動データに対し特定周波数帯域のみを抽出して出力する。周波数分析部42は、フィルタ処理部41が出力する振動データに対し周波数分析(FFT)する。周波数成分抽出部43は、周波数分析部42が出力する分析結果に対し、回転周波数測定センサ30が出力する回転周波数の整数倍(例えば、1,2,3,・・・)に対応する周波数成分を抽出する。
なお、周波数成分抽出部43が回転周波数の整数倍の周波数成分を抽出する際の、整数倍の範囲は、測定する周波数の上限を超えない範囲において任意に設定すれば良い。
【0022】
また、判定器50は、閾値比較部51と、姿勢状態判定部52と、を有する。閾値比較部51は、事前に設定される閾値を例えば記録保持回路(ROM:不図示)等から読み出し、周波数成分抽出部43が出力する周波数成分と、この閾値と、を比較する。姿勢状態判定部52は、閾値比較部51が出力する比較結果に基づき転がり軸受10が正しい姿勢状態にあるかを判定する。そして、判定器50は姿勢状態判定部52の判定結果を、モニタや報知器等からなる出力装置60に出力し、この出力装置60は、判定結果を外部に報知する。
【0023】
なお、信号処理器40及び判定器50では処理の大部分をソフトウエアにて行っているが、同様な機能が実現できれば、その一部又は全部をFPGA(Field Programable Gate Array)などのハードウエアで実現しても良いし、又はその一部又は全部をアナログ電子回路等で適宜実現しても良い。
【0024】
次に、図4を参照しながら、本実施形態の姿勢状態評価装置1で行われる姿勢状態評価のフローについて説明する。
【0025】
まず、ステップS1で、回転駆動モータ70は、治具80に固定保持された転がり軸受10を回転させる(回転ステップ)。次に、ステップS2に進み、振動測定センサ20は回転された状態の転がり軸受10の振動を測定する{振動(物理量)測定ステップ}。その後、ステップS3,S4に進み、フィルタ処理部41は振動測定センサ20により出力された振動データをフィルタ処理し(フィルタ処理ステップ)、更に周波数分析部42はこのフィルタ処理された振動データを周波数分析(FFT)する(周波数分析ステップ)。
【0026】
一方、ステップS5で、回転周波数測定センサ30は、測定した転がり軸受10の回転数に基づきその回転周波数を検出する(回転周波数検出ステップ)。そして、ステップS6で、周波数成分抽出部43は、ステップS4で得られる周波数分析結果に対し、ステップS5で検出された回転周波数の整数倍に対応する周波数成分を抽出する(周波数成分抽出ステップ)。その後、閾値比較部51は、この周波数成分と、事前に設定された閾値と、を比較し(ステップS7:閾値比較ステップ)、姿勢状態判定部52はこの比較結果に基づき転がり軸受10の姿勢状態を判定する(ステップS8:姿勢状態判定ステップ)。
【0027】
そして、姿勢状態判定部52が、周波数成分が閾値より大きいと判断する場合にはステップS8のNOに進み、出力装置60は「転がり軸受のセット直し」と外部に報知する(ステップS9)。逆に、姿勢状態判定部52が、周波数成分が閾値より小さいと判断する場合にはステップS8のYESに進み、出力装置60は「測定可」と外部に報知する(ステップS10)。その後、良好な姿勢状態が確保された転がり軸受10は、公知の方法で損傷等の品質評価が行われる。なお、この品質評価においては、本発明の姿勢状態評価方法で得られた測定データを用いて行っても良い。
【0028】
以上説明したように、本実施形態の姿勢状態評価装置、及び姿勢状態評価方法によれば、治具80に固定保持された転がり軸受10の姿勢状態を評価する際、転がり軸受10の回転周波数の整数倍に対応する、振動データの周波数成分を抽出して、この周波数成分と、事前に設定される閾値と、を比較し、この比較結果に基づき姿勢状態を判定する。これにより、任意の回転数であっても転がり軸受10の姿勢判定を容易且つ正確に行うことができる。
【0029】
また、本実施形態は既存の品質評価装置にプログラムを追加するだけで実現可能であり、ハードウエア資源のそのままの利用、及びソフトウエア資源の微小な改変で用いることができるため、導入コストを抑えることができる。例えば、転がり軸受の品質評価に一般的に用いられているアンデロンメータを使用して転がり軸受10の振動性能の品質評価を行う前に、当該アンデロンメータの、センサ、治具等のハードウエア資源をそのまま用いて、転がり軸受の姿勢判定を行うことができる。
【0030】
(第2実施形態)
次に、本発明の第2実施形態に係る姿勢状態評価装置、及び姿勢状態評価方法について図面を参照しながら説明する。
なお、本実施形態の姿勢状態評価装置は、第1実施形態と基本的構成を同一とし、測定対象物及び治具の構成が異なるのみであるため、第1実施形態との相異点を中心に説明し、第1実施形態と同一又は同等部分については、図面に同一或いは同等符号を付してその説明を省略或いは簡略化する。
【0031】
本実施形態では、図5に示すように、測定対象物を、完成品の転がり軸受10ではなく、転がり軸受10の構成部品である外輪12としている。
【0032】
また、本実施形態の治具180は、図6に示すように、回転軸部181と、この回転軸部181の一端部に接続された底部186を備える有底円筒状の円筒部185と、を有する。そして、円筒部185の内周面187に、転がり軸受10の外輪12が嵌挿されて固定保持される(図5参照)。
【0033】
振動測定センサ20は、治具180に固定保持された外輪12の内周面(外輪軌道面)に、その先端部が接触するように配設される。そして、第1実施形態と同様の方法によって、外輪12の回転時の表面振動を測定し、外輪12の姿勢状態を評価する。
【0034】
なお、本実施形態における測定対象物としては、転がり軸受10の外輪12に限定されず、内輪11や転動体13等であってもよい。例えば、測定対象物を内輪11とした場合、振動測定センサ20はその先端部が内輪11の外周面(内輪軌道面)に接触するように配設され、測定対象物を転動体13とした場合、振動測定センサ20はその先端部が転動体13の転動面に接触するように配設される。
【0035】
なお、本実施形態の姿勢状態評価装置は、例えば、転がり軸受の構成部品の品質評価に一般的に用いられているウェービメータ(転がり軸受の内外輪の軌道面、及び転動体の転動面のうねりを測定する装置)を使用して転がり軸受の構成部品の品質評価を行う前に、当該ウェービメータの、センサ、治具等のハードウエア資源をそのまま用いることによって実現可能である。したがって、上記第1実施形態と同様に、本実施形態でも導入コストを抑えることができる。
その他の作用、効果については第1実施形態と同様である。
【0036】
(第3実施形態)
次に、本発明の第3実施形態に係る姿勢状態評価装置、及び姿勢状態評価方法について図面を参照しながら説明する。
本実施形態の姿勢状態評価装置は、上記実施形態と基本的構成を同一とし、信号処理器の構成が相違するので、上記実施形態と同一又は相当部分については図面に同一或いは相当符号を付すことで説明を省略或いは簡略化し、相違部分を中心に説明する。
【0037】
図7に示すように、本実施形態の信号処理器240は、増幅器241と、フィルタ処理部242と、包絡線検波部243と、を有する。増幅器241は、振動測定センサ20が出力する測定対象物の振動データを増幅する。フィルタ処理部242は、例えばノイズを除去するローパスフィルタ或いはバンドパスフィルタ等により構成され、増幅器241が出力する振動データに対し特定周波数帯を抽出する。包絡線検波部243は、フィルタ処理部242が出力する特定周波数が抽出された振動データに対し包絡線検波処理をし、振動データの包絡線を検出し、その包絡線の振幅を求め、この振幅の値を閾値比較部51に出力する。
【0038】
閾値比較部51は、包絡線検波部243から出力された包絡線の振幅と、事前に設定される閾値と、を比較する。また、姿勢状態判定部52は、閾値比較部51が出力する比較結果に基づき転がり軸受10が正しい姿勢状態にあるかを判定する。そして、判定器50は姿勢状態判定部52の判定結果を、モニタや報知器等からなる出力装置60に出力し、出力装置60は、判定結果を外部に報知する。
その他の構成については、上述の実施形態と同様である。
【0039】
次に、図8を参照しながら、本実施形態の姿勢状態評価装置で行われる姿勢状態評価のフローについて説明する。
【0040】
まず、ステップS11で、回転駆動モータ70は治具80に固定保持された転がり軸受10を、治具80を介して回転する(回転ステップ)。次に、ステップS12に進み、振動測定センサ20は回転された状態の転がり軸受10の振動を測定する{振動(物理量)測定ステップ}。その後、ステップS13に進み、増幅器241は振動センサ20により出力された振動データを増幅する{増幅ステップ:図9(A)参照}。そして、ステップS14に進み、フィルタ処理部242はこの増幅器241により出力された振動データをフィルタ処理する{フィルタ処理ステップ:図9(B)参照}。そして、ステップS15,S16で、包絡線検波部243は、このフィルタ処理された振動データの包絡線を検出し、包絡線の振幅を抽出する{包絡線検波ステップ:図9(C)参照}。
【0041】
更に、ステップS17で、閾値比較部51は、包絡線の振幅と、事前に設定された閾値と、を比較し(閾値比較ステップ)、ステップS18で、姿勢状態判定部52はこの比較結果に基づき転がり軸受10の姿勢状態を判定する(姿勢状態判定ステップ)。
【0042】
そして、姿勢状態判定部52が、包絡線の振幅が閾値より大きいと判断する場合にはステップS18のNOに進み、出力装置60は「転がり軸受のセット直し」と外部に報知する(ステップS19)。逆に、姿勢状態判定部52が、周波数成分が閾値より小さいと判断する場合にはステップS18のYESに進み、出力装置60は「測定可」と外部に報知する(ステップS20)。
【0043】
以上、本実施形態によれば、固定保持された転がり軸受10の姿勢状態を評価する際、転がり軸受10の振動データの包絡線を検出し、包絡線の振幅と、事前に設定される閾値と、を比較し、この比較結果に基づき姿勢状態を判定する。これにより、任意の回転数であっても転がり軸受10の姿勢判定を容易且つ正確に行うことができる。
その他の構成及び作用効果については、上記第1実施形態と同様である。
【0044】
なお、本発明は前述の実施形態に例示したものに限定されるものではなく、本発明の要旨を逸脱しない範囲において適宜変更可能である。
例えば、上述の実施形態において、回転周波数測定センサ30はロータリーエンコーダであるとしたが、これに限らず、位相同期回路(PLL)を採用し、実回転数との誤差をサーボ制御して、回転周波数が常に基準発振器と同期するように構成しても良い。
【符号の説明】
【0045】
1 姿勢状態評価装置
10 転がり軸受(測定対象物)
11 内輪
12 外輪(測定対象物)
13 玉(転動体)
20 振動測定センサ(物理量測定センサ)
30 回転周波数測定センサ
40 信号処理器
41 フィルタ処理部
42 周波数分析部
43 周波数成分抽出部
50 判定器
51 閾値比較部
52 姿勢状態判定部
60 出力装置
70 回転駆動モータ(回転駆動部)
80 治具
81 回転軸部
82 段付円柱部
83 大径円柱部
84 小径円柱部
84a 外周面
180 治具
181 回転軸部
185 円筒部
186 底部
187 内周面
240 信号処理器
241 増幅器
242 フィルタ処理部
243 包絡線検波部
【特許請求の範囲】
【請求項1】
測定対象物を固定保持する治具と、
前記治具を介して前記測定対象物を回転させる回転駆動部と、
を備え、
前記測定対象物が前記回転駆動部によって回転された状態で品質評価が行われる前に、前記治具に固定保持された前記測定対象物の姿勢状態を評価する姿勢状態評価装置であって、
前記測定対象物の物理量を測定する物理量測定センサと、
前記測定対象物の回転周波数を測定する回転周波数測定センサと、
前記物理量測定センサが出力する物理量データに対し特定周波数帯を抽出するフィルタ処理部と、
前記フィルタ処理部が出力する特定周波数帯が抽出された前記物理量データに対し周波数分析する周波数分析部と、
前記周波数分析部が出力する分析結果に対し、前記回転周波数測定センサが出力する回転周波数の整数倍に対応する周波数成分を抽出する周波数成分抽出部と、
前記周波数成分抽出部が出力する周波数成分と、事前に設定される閾値と、を比較する閾値比較部と、
前記閾値比較部が出力する比較結果に基づき前記測定対象物の前記姿勢状態を判定する姿勢状態判定部と、
を備えることを特徴とする姿勢状態評価装置。
【請求項2】
測定対象物を固定保持する治具と、
前記治具を介して前記測定対象物を回転させる回転駆動部と、
を備え、
前記測定対象物が前記回転駆動部によって回転された状態で品質評価が行われる前に、前記治具に固定保持された前記測定対象物の姿勢状態を評価する姿勢状態評価装置であって、
前記測定対象物の物理量を測定する物理量測定センサと、
前記物理量測定センサが出力する物理量データを増幅する増幅器と、
前記増幅器が出力する前記物理量データに対し特定周波数帯を抽出するフィルタ処理部と、
前記フィルタ処理部が出力する特定周波数帯が抽出された前記物理量データの包絡線を検出し、該包絡線の振幅を求める包絡線検波部と、
前記包絡線検波部が出力する前記包絡線の振幅と、事前に設定される閾値と、を比較する閾値比較部と、
前記閾値比較部が出力する比較結果に基づき前記測定対象物の前記姿勢状態を判定する姿勢状態判定部と、
を備えることを特徴とする姿勢状態評価装置。
【請求項3】
測定対象物を固定保持する治具と、
前記治具を介して前記測定対象物を回転させる回転駆動部と、
を備え、
前記測定対象物が前記回転駆動部によって回転された状態で品質評価が行われる前に、前記治具に固定保持された前記測定対象物の姿勢状態を評価する姿勢状態評価方法であって、
前記測定対象物を回転する回転ステップと、
前記回転ステップにより回転された状態の前記測定対象物の物理量を測定する物理量測定ステップと、
前記回転ステップにより回転された状態の前記測定対象物の回転周波数を検出する回転周波数検出ステップと、
前記物理量測定ステップで測定された物理量データに対し特定周波数帯を抽出するフィルタ処理ステップと、
前記フィルタ処理ステップにより特定周波数帯が抽出された前記物理量データを周波数分析する周波数分析ステップと、
前記周波数分析ステップで得られる分析結果に対し、前記回転周波数検出ステップで得られる回転周波数の整数倍に対応する周波数成分を抽出する周波数成分抽出ステップと、
前記周波数成分抽出ステップで得られた周波数成分と、事前に設定された閾値と、を比較する閾値比較ステップと、
前記閾値比較ステップの比較結果に基づき前記測定対象物の前記姿勢状態を判定する姿勢状態判定ステップと、
を備えることを特徴とする姿勢状態評価方法。
【請求項4】
測定対象物を固定保持する治具と、
前記治具を介して前記測定対象物を回転させる回転駆動部と、
を備え、
前記測定対象物が前記回転駆動部によって回転された状態で品質評価が行われる前に、固定保持された前記測定対象物の姿勢状態を評価する姿勢状態評価方法であって、
前記測定対象物を回転する回転ステップと、
前記回転ステップにより回転された状態の前記測定対象物の物理量を測定する物理量測定ステップと、
前記物理量測定ステップで測定された物理量データを増幅する増幅ステップと、
前記増幅ステップで増幅された前記物理量データに対し特定周波数帯を抽出するフィルタ処理ステップと、
前記フィルタ処理ステップにより特定周波数帯が抽出された前記物理量データの包絡線を検出し、該包絡線の振幅を求める包絡線検波ステップと、
前記包絡線検波ステップにより求められた前記包絡線の振幅と、事前に設定された閾値と、を比較する閾値比較ステップと、
前記閾値比較ステップの比較結果に基づき前記測定対象物の前記姿勢状態を判定する姿勢状態判定ステップと、
を備えることを特徴とする姿勢状態評価方法。
【請求項1】
測定対象物を固定保持する治具と、
前記治具を介して前記測定対象物を回転させる回転駆動部と、
を備え、
前記測定対象物が前記回転駆動部によって回転された状態で品質評価が行われる前に、前記治具に固定保持された前記測定対象物の姿勢状態を評価する姿勢状態評価装置であって、
前記測定対象物の物理量を測定する物理量測定センサと、
前記測定対象物の回転周波数を測定する回転周波数測定センサと、
前記物理量測定センサが出力する物理量データに対し特定周波数帯を抽出するフィルタ処理部と、
前記フィルタ処理部が出力する特定周波数帯が抽出された前記物理量データに対し周波数分析する周波数分析部と、
前記周波数分析部が出力する分析結果に対し、前記回転周波数測定センサが出力する回転周波数の整数倍に対応する周波数成分を抽出する周波数成分抽出部と、
前記周波数成分抽出部が出力する周波数成分と、事前に設定される閾値と、を比較する閾値比較部と、
前記閾値比較部が出力する比較結果に基づき前記測定対象物の前記姿勢状態を判定する姿勢状態判定部と、
を備えることを特徴とする姿勢状態評価装置。
【請求項2】
測定対象物を固定保持する治具と、
前記治具を介して前記測定対象物を回転させる回転駆動部と、
を備え、
前記測定対象物が前記回転駆動部によって回転された状態で品質評価が行われる前に、前記治具に固定保持された前記測定対象物の姿勢状態を評価する姿勢状態評価装置であって、
前記測定対象物の物理量を測定する物理量測定センサと、
前記物理量測定センサが出力する物理量データを増幅する増幅器と、
前記増幅器が出力する前記物理量データに対し特定周波数帯を抽出するフィルタ処理部と、
前記フィルタ処理部が出力する特定周波数帯が抽出された前記物理量データの包絡線を検出し、該包絡線の振幅を求める包絡線検波部と、
前記包絡線検波部が出力する前記包絡線の振幅と、事前に設定される閾値と、を比較する閾値比較部と、
前記閾値比較部が出力する比較結果に基づき前記測定対象物の前記姿勢状態を判定する姿勢状態判定部と、
を備えることを特徴とする姿勢状態評価装置。
【請求項3】
測定対象物を固定保持する治具と、
前記治具を介して前記測定対象物を回転させる回転駆動部と、
を備え、
前記測定対象物が前記回転駆動部によって回転された状態で品質評価が行われる前に、前記治具に固定保持された前記測定対象物の姿勢状態を評価する姿勢状態評価方法であって、
前記測定対象物を回転する回転ステップと、
前記回転ステップにより回転された状態の前記測定対象物の物理量を測定する物理量測定ステップと、
前記回転ステップにより回転された状態の前記測定対象物の回転周波数を検出する回転周波数検出ステップと、
前記物理量測定ステップで測定された物理量データに対し特定周波数帯を抽出するフィルタ処理ステップと、
前記フィルタ処理ステップにより特定周波数帯が抽出された前記物理量データを周波数分析する周波数分析ステップと、
前記周波数分析ステップで得られる分析結果に対し、前記回転周波数検出ステップで得られる回転周波数の整数倍に対応する周波数成分を抽出する周波数成分抽出ステップと、
前記周波数成分抽出ステップで得られた周波数成分と、事前に設定された閾値と、を比較する閾値比較ステップと、
前記閾値比較ステップの比較結果に基づき前記測定対象物の前記姿勢状態を判定する姿勢状態判定ステップと、
を備えることを特徴とする姿勢状態評価方法。
【請求項4】
測定対象物を固定保持する治具と、
前記治具を介して前記測定対象物を回転させる回転駆動部と、
を備え、
前記測定対象物が前記回転駆動部によって回転された状態で品質評価が行われる前に、固定保持された前記測定対象物の姿勢状態を評価する姿勢状態評価方法であって、
前記測定対象物を回転する回転ステップと、
前記回転ステップにより回転された状態の前記測定対象物の物理量を測定する物理量測定ステップと、
前記物理量測定ステップで測定された物理量データを増幅する増幅ステップと、
前記増幅ステップで増幅された前記物理量データに対し特定周波数帯を抽出するフィルタ処理ステップと、
前記フィルタ処理ステップにより特定周波数帯が抽出された前記物理量データの包絡線を検出し、該包絡線の振幅を求める包絡線検波ステップと、
前記包絡線検波ステップにより求められた前記包絡線の振幅と、事前に設定された閾値と、を比較する閾値比較ステップと、
前記閾値比較ステップの比較結果に基づき前記測定対象物の前記姿勢状態を判定する姿勢状態判定ステップと、
を備えることを特徴とする姿勢状態評価方法。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2013−15410(P2013−15410A)
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願番号】特願2011−148464(P2011−148464)
【出願日】平成23年7月4日(2011.7.4)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
【公開日】平成25年1月24日(2013.1.24)
【国際特許分類】
【出願日】平成23年7月4日(2011.7.4)
【出願人】(000004204)日本精工株式会社 (8,378)
【Fターム(参考)】
[ Back to top ]