
媒体処理装置、媒体処理装置の制御方法、及び、プログラム
【課題】本発明によれば、複数の媒体を連続して処理する媒体処理装置について、複数の媒体の処理に係るスループットを向上する。
【解決手段】複合処理装置1の処理制御部70aは、搬送路上に位置している小切手に対する、切替部、搬送部、MICRヘッド35を含む磁気読取部、及び、CISユニットを含む光学読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立した場合に、搬送路上に小切手が位置しているか否かにかかわらず、収納部に収納された次の小切手について搬送部による搬送を開始する。
【解決手段】複合処理装置1の処理制御部70aは、搬送路上に位置している小切手に対する、切替部、搬送部、MICRヘッド35を含む磁気読取部、及び、CISユニットを含む光学読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立した場合に、搬送路上に小切手が位置しているか否かにかかわらず、収納部に収納された次の小切手について搬送部による搬送を開始する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、媒体を連続して処理する媒体処理装置、当該媒体処理装置の制御方法、及び、当該媒体処理装置を制御するためのプログラムに関する。
【背景技術】
【0002】
従来、小切手等の媒体を搬送すると共に、搬送中、媒体を磁気的、光学的に読み取る媒体処理装置が知られている(例えば、特許文献1参照)。
この種の媒体処理装置では、収納部に複数の媒体を収納し、これら複数の媒体に対して、搬送、及び、読み取りを含む一連の処理を連続して実行するものがある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−255393号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した媒体処理装置のように、複数の媒体を連続して処理するものは、複数の媒体の処理に要する時間を短縮し、商品としての価値、魅力の向上や、ユーザーの満足度、利便性の向上を図ることを目的として、媒体を連続して処理可能な構成となっている。従って、このような媒体処理装置では、複数の媒体の処理に係るスループットをできるだけ向上したいとする強いニーズがある。
本発明は、上述した事情に鑑みてなされたものであり、複数の媒体を連続して処理する媒体処理装置について、複数の媒体の処理に係るスループットを向上することを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するために、本発明は、複数の媒体を収納可能な収納部と、前記収納部に連通し、前記媒体を搬送する搬送路と、前記搬送路に連通可能であり、前記媒体が排出される複数の排出部と、前記媒体を排出する前記排出部を切り替える切替部と、前記収納部から前記搬送路を経由して前記排出部へ、前記媒体を搬送する搬送部と、前記搬送路に配置され、前記搬送部により搬送される前記媒体の情報を読み取る読取部と、前記切替部、前記搬送部、及び、前記読取部を制御して、前記収納部に収納された複数の前記媒体に対して、前記収納部から前記排出部への搬送、及び、搬送中の前記媒体に対する前記読取部による読み取りを含む一連の処理を、連続して実行する処理制御部と、を備え、前記処理制御部は、前記搬送路上に位置している前記媒体に対する、前記切替部、前記搬送部、及び、前記読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立した場合に、前記搬送路上に前記媒体が位置しているか否かにかかわらず、前記収納部に収納された次の前記媒体について前記搬送部による搬送を開始することを特徴とする。
ここで、収納部に収納された複数の媒体について、1の媒体に対する一連の処理の開始後、できるだけ早い段階で次の媒体に対して一連の処理を開始できれば、複数の媒体の処理に係るスループットを向上することが可能である。これを踏まえ、上記構成によれば、搬送路上に位置している媒体に対する一連の処理が完了したことを、次の媒体の処理の開始のトリガーとするのではなく、切替部、搬送部、及び、読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立したことを、次の媒体の処理の開始のトリガーとするため、搬送路上に媒体が位置している状況であっても、可能な場合は、次の媒体に対する処理を開始することが可能となり、できるだけ早い段階で次の媒体に対して処理が開始されることとなり、複数の媒体の処理に係るスループットを向上することが可能となる。
【0006】
また、本発明は、前記読取部は、前記搬送部により搬送される前記媒体を磁気的に読み取る磁気読取部と、光学的に読み取る光学読取部と、を含み、前記処理制御部は、前記搬送路上に位置している前記媒体に対する、前記切替部、前記搬送部、前記磁気読取部、及び、前記光学読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立した場合に、前記搬送路上に前記媒体が位置しているか否かにかかわらず、前記収納部に収納された次の前記媒体について前記搬送部による搬送を開始することを特徴とする。
この構成によれば、搬送路上に位置している媒体に対する一連の処理が完了したことを、次の媒体の処理の開始のトリガーとするのではなく、切替部、搬送部、磁気読取部、及び、光学読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立したことを、次の媒体の処理の開始のトリガーとするため、搬送路上に媒体が位置している状況であっても、可能な場合は、次の媒体に対する処理を開始することが可能となり、できるだけ早い段階で次の媒体に対して処理が開始されることとなり、複数の媒体の処理に係るスループットを向上することが可能となる。
【0007】
また、本発明は、前記光学読取部による読み取り結果に係るデータを収容するバッファーを、備え、前記光学読取部は、読み取り結果に係るデータをバッファーに格納し、格納した前記データを、接続された制御装置に転送し、前記所定の条件には、前記収納部に収納された次の前記媒体を前記光学読取部で読み取った場合に、読み取り結果に係る前記データを前記バッファーに格納できること、という条件が含まれていることを特徴とする。
この構成によれば、収納部に収納された媒体の搬送を開始する条件に、当該媒体を読取部で読み取った場合に、読み取り結果に係るデータをバッファーに格納できること、という条件が含まれているため、当該媒体について、空き領域が確保できない等の理由により読取部による読み取り結果に係るデータをバッファーに格納できない状態で搬送が開始されることを的確に防止しつつ、当該媒体の搬送が開始されるタイミングを早めることができ、複数の媒体の処理に係るスループットを向上することが可能となる。
【0008】
また、本発明は、前記所定の条件には、前記搬送路上に位置している前記媒体について、前記磁気読取部による読み取りが終了していること、という条件が含まれていることを特徴とする。
ここで、収納部に収納された媒体を搬送路に送り出す場合、送り出しに係る動作に伴って、磁気読取部による読み取りに悪影響を与えるノイズが発生する。そして、媒体の送り出しは定期的に行われるものではなく、また、送り出しごとに発生するノイズの態様が異なるため、ノイズによる磁気的な読み取りへの悪影響の対策として、例えば、送り出しが行われる度に逆位相の信号によりノイズを除去する等の処置を行うことは適切でない。以上を踏まえ、上記構成によれば、収納部に収納された媒体の搬送を開始する条件に、搬送路上に位置している媒体について、少なくとも、磁気読取部による読み取りが終了していること、という条件が含まれているため、収納部に収納された媒体を送り出すことに起因して磁気読取部による読み取りに悪影響が及ぶことを防止した上で、当該媒体の搬送が開始されるタイミングを早めることができ、複数の媒体の処理に係るスループットを向上することが可能となる。
【0009】
また、本発明は、前記処理制御部は、前記搬送路上に位置している前記媒体に対する所定の処理の結果に応じて、前記切替部によって前記搬送路上に設けられた切替板を移動し、又は、移動しないことにより前記媒体が排出される前記排出部を前記所定の処理の結果に応じた前記排出部に切り替え、前記所定の条件には、前記収納部に収納された次の前記媒体の搬送を開始した後に、前記搬送路上に位置している前記媒体について、前記切替板の移動が発生しないこと、という条件が含まれていることを特徴とする。
ここで、切替板の移動が行われる場合、当該移動に伴って、磁気読取部による読み取りに悪影響を与えるノイズが発生する。そして、切替板の移動は定期的に行われるものではなく、また、送り出しごとに発生するノイズの態様が異なるため、ノイズによる磁気的な読み取りへの悪影響の対策として、例えば、切替板の移動が行われる度に逆位相の信号によりノイズを除去する等の処置を行うことは適切でない。以上を踏まえ、上記構成によれば、収納部に収納された媒体の搬送を開始する条件に、搬送路上に位置している媒体について、切替板の移動が発生しないこと、という条件が含まれているため、収納部に収納された媒体に対して磁気読取部による読み取り中に切替板の移動が発生し、これにより、磁気読取部による読み取りに悪影響が及ぶことを防止した上で、当該媒体の搬送が開始されるタイミングを早めることができ、複数の媒体の処理に係るスループットを向上することが可能となる。
【0010】
また、本発明は、前記処理制御部は、前記切替部による切り替え後の前記排出部に前記媒体を排出すべく、前記媒体をバックフィード可能に構成され、前記所定の条件には、前記収納部に収納された次の前記媒体の搬送を開始した後に、前記搬送路上に位置している前記媒体について、前記バックフィードが発生しないこと、という条件が含まれていることを特徴とする。
この構成によれば、収納部に収納された媒体の搬送を開始する条件に、搬送路上に位置している媒体について、バックフィードが発生しないこと、という条件が含まれているため、収納部に収納された媒体を搬送路に送り出して処理を開始した後、搬送路上に位置する他の媒体についてバックフィードが発生し、これに起因して何らかのエラーが発生することを防止できる。
【0011】
また、上記目的を達成するために、本発明は、複数の媒体を収納可能な収納部と、前記収納部に連通し、前記媒体を搬送する搬送路と、前記搬送路に連通可能であり、前記媒体が排出される複数の排出部と、前記媒体を排出する前記排出部を切り替える切替部と、前記収納部から前記搬送路を経由して前記排出部へ、前記媒体を搬送する搬送部と、前記搬送路に配置され、前記搬送部により搬送される前記媒体の情報を読み取る読取部と、を備える媒体処理装置の制御方法であって、前記搬送路上に位置している前記媒体に対する、前記切替部、前記搬送部、及び、前記読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立したか否かを判別し、成立した場合に前記搬送路上に前記媒体が位置しているか否かにかかわらず、前記収納部に収納された次の前記媒体について前記搬送部による搬送を開始することを特徴とする。
この制御方法によれば、搬送路上に位置している媒体に対する一連の処理が完了したことを、次の媒体の処理の開始のトリガーとするのではなく、切替部、搬送部、及び、読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立したことを、次の媒体の処理の開始のトリガーとするため、搬送路上に媒体が位置している状況であっても、可能な場合は、次の媒体に対する処理を開始することが可能となり、できるだけ早い段階で次の媒体に対して処理が開始されることとなり、複数の媒体の処理に係るスループットを向上することが可能となる。
【0012】
また、本発明は、前記読取部は、前記搬送部により搬送される前記媒体を磁気的に読み取る磁気読取部と光学的に読み取る光学読取部と、含み、前記搬送路上に位置している前記媒体に対する、前記切替部、前記搬送部、前記磁気読取部、及び、前記光学読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立したか否かを判別し、成立した場合に前記搬送路上に前記媒体が位置しているか否かにかかわらず、前記収納部に収納された次の前記媒体について前記搬送部による搬送を開始することを特徴とする。
この制御方法によれば、搬送路上に位置している媒体に対する一連の処理が完了したことを、次の媒体の処理の開始のトリガーとするのではなく、切替部、搬送部、磁気読取部、及び、光学読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立したことを、次の媒体の処理の開始のトリガーとするため、搬送路上に媒体が位置している状況であっても、可能な場合は、次の媒体に対する処理を開始することが可能となり、できるだけ早い段階で次の媒体に対して処理が開始されることとなり、複数の媒体の処理に係るスループットを向上することが可能となる。
【0013】
また、上記目的を達成するために、本発明は、複数の媒体を収納可能な収納部と、前記収納部に連通し、前記媒体を搬送する搬送路と、前記搬送路に連通可能であり、前記媒体が排出される複数の排出部と、前記媒体を排出する前記排出部を切り替える切替部と、前記収納部から前記搬送路を経由して前記排出部へ、前記媒体を搬送する搬送部と、前記搬送路に配置され、前記搬送部により搬送される前記媒体の情報を読み取る読取部と、を備える媒体処理装置の各部を制御する制御部により実行されるプログラムであって、前記制御部を、前記搬送路上に位置している前記媒体に対する、前記切替部、前記搬送部、前記読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立した場合に、前記搬送路上に前記媒体が位置しているか否かにかかわらず、前記収納部に収納された次の前記媒体について前記搬送部による搬送を開始する処理制御部として機能させることを特徴とする。
このプログラムを実行すれば、搬送路上に位置している媒体に対する一連の処理が完了したことを、次の媒体の処理の開始のトリガーとするのではなく、切替部、搬送部、磁気読取部、及び、光学読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立したことを、次の媒体の処理の開始のトリガーとするため、搬送路上に媒体が位置している状況であっても、可能な場合は、次の媒体に対する処理を開始することが可能となり、できるだけ早い段階で次の媒体に対して処理が開始されることとなり、複数の媒体の処理に係るスループットを向上することが可能となる。
【発明の効果】
【0014】
本発明によれば、複数の媒体を連続して処理する媒体処理装置について、複数の媒体の処理に係るスループットを向上することができる。
【図面の簡単な説明】
【0015】
【図1】複合処理装置の外観斜視図である。
【図2】複合処理装置の内部構造を示す図である。
【図3】複合処理装置の機能的構成を示すブロック図である。
【図4】複合処理装置の動作を示すフローチャートである。
【図5】複合処理装置の動作を示すフローチャートである。
【発明を実施するための形態】
【0016】
以下、図面を参照して本発明の実施形態について説明する。
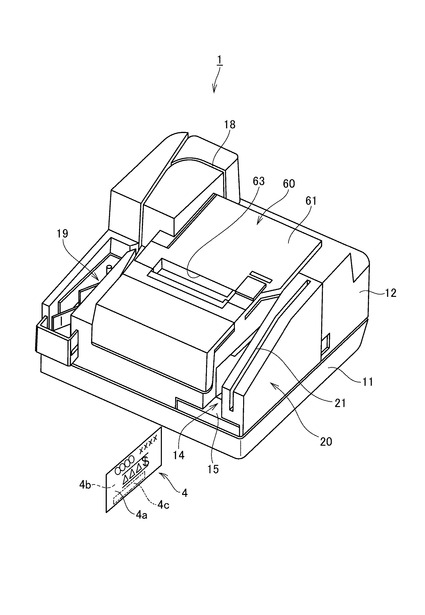
図1は、本実施の形態に係る複合処理装置1(媒体処理装置)の外観斜視図である。
複合処理装置1は、読取対象媒体であるシート状の小切手4(媒体)や帳票類に対し、この読取対象物に記録された磁気インク文字の読み取り、読取対象物の両面の光学的読み取り、及び、当該読取対象物への画像の記録を行う装置である。また、複合処理装置1は、クレジットカード等のカード型の媒体に記録された磁気情報を読み取るリーダーとしての機能、及び、感熱ロール紙に画像を記録して切断することにより、画像が記録された所定の紙片を発行する機能を備えている。
【0017】
本実施形態では、読取対象物として小切手4を処理する場合を例に挙げて説明する。小切手4は、図1に示すように、所定の模様や装飾が施されたシートに金額、振出人、通し番号、サインなどが記録された帳票である。これら金額、振出人、通し番号、サインなどは表面4aに記録される。小切手4の表面4aには小切手4の長辺方向に延びる磁気インク文字列4cが形成されている。磁気インク文字列4cは、磁気インクで印刷された複数の磁気インク文字(MICR文字)が並んだものであり、磁気的または光学的に読み取ることができる。
小切手4の裏面4bには裏書き欄が設けられている。この裏書き欄には、後述するインクジェットヘッド10によって、裏書きに係る画像が記録される。小切手4の短辺方向及び長辺方向のサイズは規格化されているものの、多様な規格が存在するため、実際には様々なサイズがある。複合処理装置1では、一般的な小切手4のサイズをほぼ包含し得る最大サイズを規定し、この最大サイズ内の小切手4であれば処理できる。
【0018】
複合処理装置1は、本体下部を覆う下部ケース11、及び下部ケース11に被せられるカバー12からなる外装を有し、外装の内部に複合処理装置1の本体13が収容されている。複合処理装置1の前面には、小切手4を挿入する挿入口14が開口しており、挿入口14の奥には複数の小切手4を積層して収納できるストッカー15(収納部)が設けられている。このストッカー15は、前面側へ向かって引き出し自在に構成されており、ストッカー15に収納すべき小切手4のサイズに応じてストッカー15を引き出した上で、このストッカー15に小切手4を収納させることが可能である。
また、カバー12には、上面視で略U字形状に、小切手4の搬送路Wとなるスリット18が形成されている。スリット18は、上述したストッカー15に連通すると共に、スリット18は複合処理装置1の前面側に設けられたポケット19(排出部)に連通している。ストッカー15に収納された小切手4は、後述するように1枚ずつ複合処理装置1の内部に取り込まれ、スリット18を通る間に処理されて、処理後の小切手4はポケット19に排出される。ポケット19には複数の小切手4を収納することができる。
図1に示すように、ストッカー15の側方には、磁気カードリーダーユニット20が設けられている。磁気カードリーダーユニット20は、カバー12に形成されたカードスリット21と、このカードスリット21に対応して設けられたMCRヘッド22(図3)とを備え、カードスリット21を通るカード類に磁気的に記録された情報をMCRヘッド22によって読み取る。
【0019】
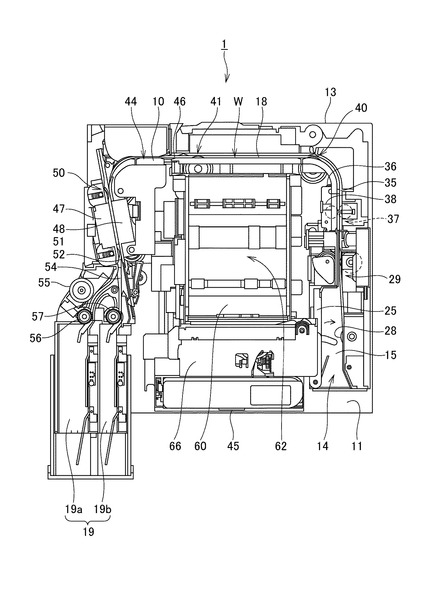
図2は、複合処理装置1の外装内部に収容されている本体13の構成を示す平面図である。ストッカー15の一側面にはホッパー25が設けられている。このホッパー25は、ホッパー駆動モーター26(図3)により、図中矢印方向に回動可能に構成されており、ストッカー15に貯留された小切手4を他方の側面側に付勢する。
ストッカー15の他方の側面には、後述するASF(Automatically Sheet Feeder)モーター27(図3)により駆動されるピックアップローラー28が配置されており、ホッパー25がピックアップローラー28側に回動すると、この回動に応じてストッカー15内の小切手4のうち1枚がピックアップローラー28に付勢され、当該ローラーに接触して、当該ローラーの回転に応じて搬送路Wに引き込まれる。
ストッカー15の奥には、一対のローラーで構成されるASFローラー29が配置されている。ASFローラー29の2つのローラーは、搬送路Wの両側に配置され、一方は後述するASFモーター27の動力により回転し、他方のローラーは従動ローラーである。ピックアップローラー28に接した小切手4はASFローラー29に挟まれて、スリット18内を下流側へ搬送される。
【0020】
ストッカー15の所定の位置には、ASF用紙検出器31(図3)が設けられている。ASF用紙検出器31は、例えば透過型光センサーで構成され、ストッカー15における小切手4の有無を検出する。
また、ストッカー15において、ホッパー25の待機位置には、ホッパー位置検出器32(図3)が設けられている。ホッパー位置検出器32は、例えば透過型光センサーで構成され、ホッパー25が待機位置に位置しているか否かを検出する。
ASFローラー29の下流側には、小切手4の表面4aに接して磁気インク文字列4c(図1)を磁気的に読み取るMICR(Magnetic Ink Character Recognition)ヘッド35が配置されている。MICRヘッド35には、MICRローラー36が対向配置される。MICRローラー36はMICRヘッド35側に付勢されており、小切手4をMICRヘッド35に押しつけながら回転して、小切手4を、MICR文字の読み取りに適した定速で搬送する。MICRヘッド35の上流側には、ASFローラー29により繰り出された小切手4をMICRヘッド35に案内する、一対のローラーからなるアシストローラー37が配置されている。
【0021】
また、搬送路W上においてアシストローラー37とMICRヘッド35との間には、用紙長検出器38が配置されている。用紙長検出器38は、例えば反射型光センサーで構成され、搬送路W上を通る小切手4の検出位置における有無を検出することにより、小切手4の先端及び後端を検出する。用紙長検出器38の検出値は後述する制御部70により取得され、この検出値の変化に基づいて小切手4の長さが求められる。
搬送路W上でMICRヘッド35の下流側には、搬送路Wを挟んで対向する一対のローラーを有する第1搬送ローラー40が設けられ、さらに、この第1搬送ローラー40の下流側には第2搬送ローラー41が設けられている。これら第1搬送ローラー40、及び、第2搬送ローラー41は、搬送モーター42(図3)によって回転駆動されるローラーであり、これらローラーによって小切手4はインクジェットプリンターユニット44へ搬送される。
【0022】
インクジェットプリンターユニット44は、インクジェットヘッド10を備えている。インクジェットヘッド10は、本体13の前部に収容されているインクカートリッジ45からインクの供給を受けて、小切手4にインクを吐出するインクジェット方式の記録ヘッドである。このインクジェットヘッド10は、いわゆるラインインクジェットヘッドであり、小切手4に対する記録の際は、一定の速度で搬送される小切手4の裏面4bに対して、固定された状態のインクジェットヘッド10からインクが吐出されて、画像が記録される。この小切手4の裏面4bに記録される画像は、いわゆる裏書きと呼ばれる文字や記号等である。
インクジェットヘッド10の上流側であって、インクジェットヘッド10と、第2搬送ローラー41との間には、中間検出器46が設けられている。中間検出器46は、例えば反射型光センサーで構成され、検出位置における小切手4の有無を検出する。
【0023】
インクジェットヘッド10の下流には、小切手4を光学的に読み取るCIS(Contact Image Sensor)ユニットが配置されている。このCISユニットは、小切手4の表面4aを読み取る表面CISユニット47と、裏面4bを読み取る裏面CISユニット48とを有し、小切手4の両面を光学的に読み取り可能である。表面CISユニット47と裏面CISユニット48は搬送路Wを挟んで対向配置されており、これらユニットの上流側には第1CISローラー50が配置され、また、下流側には第2CISローラー51が配置されている。これら第1CISローラー50、及び、第2CISローラー51は、搬送モーター42によって回転駆動されるローラーであり、これらローラーによってCISユニットによって読み取り中の小切手4が安定して搬送される。
第2CISローラー51の下流には、排出検出器52が設けられている。排出検出器52は、例えば反射型光センサーで構成され、検出位置における小切手4の有無を検出する。
【0024】
表面CISユニット47、裏面CISユニット48の下流側には上述したポケット19が設けられている。ポケット19は、メインポケット19a(排出部)と、サブポケット19b(排出部)とに区画されており、スリット18が分岐して、それぞれのポケット19に連通している。これらメインポケット19a、及び、サブポケット19bには、それぞれ複数の小切手4を収納できる。
そして、スリット18が分岐した位置には、小切手4を排出すべきポケット19を、メインポケット19aとサブポケット19bとのいずれかに切り替える切替板54が配置されている。切替板54は、メインポケット19aに連通する経路とサブポケット19bに連通する経路のいずれか一方を塞ぐことで小切手4を他方に案内するガイドであり、切替板駆動モーター55によって駆動される。切替板54からメインポケット19aに繋がる経路には排出ローラー56が設けられ、また、切替板54からサブポケット19bに繋がる経路には排出ローラー57が設けられており、小切手4は、これらローラーにより切替板54に案内されたいずれかのポケット19にスムーズに排出される。
後述するように、複合処理装置1は、MICRヘッド35による磁気インク文字列4cの読み取り結果に基づいて、小切手4が正しくセットされていると判別した場合は、小切手4をメインポケット19aに排出し、一方、小切手4が正しくセットされていないと判別した場合は、サブポケット19bに排出する。
【0025】
また、図1及び図2に示すように、複合処理装置1の中央部には、画像が記録された紙片を発行するサーマルプリンターユニット60が設けられている。
図1に示すように、サーマルプリンターユニット60は、ユニット本体の上部を覆うプリンターカバー61を備えている。このプリンターカバー61は、カバー12に対して開閉自在に取り付けられており、プリンターカバー61を開くと、感熱ロール紙を収容可能な空間であるロール紙収容部62(図3)が露出し、感熱ロール紙の補充や交換が可能となる。プリンターカバー61には、排紙口63が形成されており、ロール紙収容部62に収容された感熱ロール紙は、排紙口63を介して、排出される。
サーマルプリンターユニット60は、ロール紙収容部62に収容した感熱ロール紙を繰り出して搬送路上を搬送させるローラー状のプラテン(不図示)と、プラテンに対向配置されたサーマルヘッド65(図3)と、搬送方向に対し直交する方向に感熱ロール紙を切断するカッターユニット66とを備えている。紙片の発行に際し、サーマルプリンターユニット60は、プラテンを駆動して感熱ロール紙を搬送方向に搬送しつつ、サーマルヘッド65により感熱ロール紙に画像を記録し、カッターユニット66によって所定の位置で感熱ロール紙を切断することにより、紙片を発行する。
【0026】
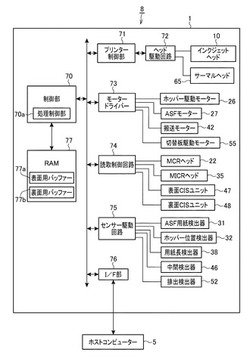
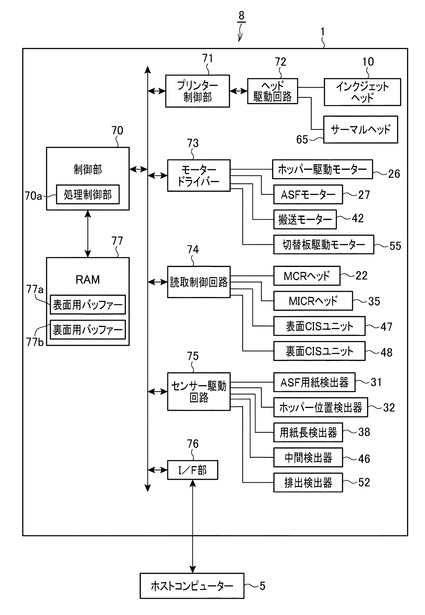
図3は、複合処理装置1とホストコンピューター5(制御装置)とを接続して構成される読取システム8の機能的構成を示すブロック図である。
複合処理装置1は、複合処理装置1全体を制御するCPU、RAM、フラッシュROM等により構成される制御部70と、インクジェットプリンターユニット44及びサーマルプリンターユニット60を制御するプリンター制御部71と、ヘッド駆動回路72と、モータードライバー73と、読取制御回路74と、センサー駆動回路75と、インターフェイス部76とを有し、これらの各部は相互に通信可能に接続されている。
【0027】
制御部70は、フラッシュROMに記憶されている制御プログラムをCPUにより読み出して実行することにより、複合処理装置1の各部を制御する。制御部70には、RAM77が接続されており、このRAM77には、表面用バッファー77a(バッファー)、及び、裏面用バッファー77b(バッファー)が形成されているが、これらについては後述する。
プリンター制御部71は、制御部70の制御の下、ヘッド駆動回路72を介してインクジェットヘッド10に駆動電流を供給し、小切手4への記録を行う。また、プリンター制御部71は、制御部70の制御の下、ヘッド駆動回路72を介してサーマルヘッド65に駆動電流を供給し、感熱ロール紙への記録を行う。
モータードライバー73は、ホッパー駆動モーター26に接続され、制御部70の制御に従ってホッパー25を回動させる。また、モータードライバー73は、ASFモーター27、及び、搬送モーター42に接続され、これら各モーターに駆動電流や駆動パルスを出力して、制御部70の制御に従いこれらモーターを動作させて、これらモーターに接続されたローラーを駆動する。
これら制御部70や、モータードライバー73、ホッパー駆動モーター26、ホッパー25、ASFモーター27、搬送モーター42、これらモーターに接続されたローラー、その他の機構、装置が協働して、ストッカー15(収納部)に収納された媒体を、ストッカー15(収納部)に連通する搬送路W上を搬送させ、搬送路Wにそれぞれ連通するメインポケット19a、サブポケット19b(複数の排出部)のいずれかに排出する搬送部として機能する。
また、モータードライバー73は、切替板駆動モーター55に接続され、制御部70の制御の下当該モーターに駆動電流や駆動パルスを出力することによって切替板54を移動させ、小切手4が排出されるポケット19を、メインポケット19a側、又は、サブポケット19b側に切り替える。これら制御部70や、モータードライバー73,切替板駆動モーター55、切替板54、その他の機構、装置が協働して、小切手4(媒体)が排出されるポケット19(排出部)を切り替える切替部として機能する。
【0028】
読取制御回路74は、MCRヘッド22、MICRヘッド35、表面CISユニット47、及び、裏面CISユニット48に接続されている。
読取制御回路74は、制御部70の制御に従って、カードスリット21(図1)にカード類が通される際にMCRヘッド22によって磁気情報を読み取らせ、MCRヘッド22が出力する読取信号をデジタル化して制御部70に出力する。
また、読取制御回路74は、制御部70の制御に従って、MICRヘッド35によって磁気情報を読み取らせ、MICRヘッド35が出力する読取信号をデジタル化して制御部70に出力する。制御部70や、読取制御回路74、MICRヘッド35、その他の機構、装置が協働して磁気読取部として機能する。
【0029】
また、読取制御回路74は、制御部70の制御に従って、表面CISユニット47及び裏面CISユニット48に、小切手4の表面4a及び裏面4bの読み取りを実行させる。
詳述すると、制御部70は、表面CISユニット47を制御して、小切手4の表面4aを光学的に読み取らせると共に、読み取り結果に係るデータを、順次、RAM77の表面用バッファー77aに書き込む。この書き込みと併せて、制御部70は、表面用バッファー77aに書き込まれたデータを順次読み出してホストコンピューター5に転送する。同様にして、制御部70は、裏面CISユニット48により小切手4の裏面4bを光学的に読み取る。
ここで、表面用バッファー77aの記憶領域のうち、書き込まれた後、転送されていないデータが記憶された記憶領域は、新たにデータを書き込むことはできない。従って、当該記憶領域以外の記憶領域の容量が、表面用バッファー77aの空き容量となる。裏面用バッファー77bについても同様である。
制御部70や、表面CISユニット47、裏面CISユニット48、その他の装置、機構が協働して光学読取部として機能する。
【0030】
センサー駆動回路75は、ASF用紙検出器31、ホッパー位置検出器32、用紙長検出器38、中間検出器46、及び、排出検出器52に接続され、これらの各検出器に電流を供給して、所定周期で出力値を取得し、取得した出力値をデジタルデータに変換して制御部70に出力する。
インターフェイス部76は、ホストコンピューター5に対して有線または無線で接続され、制御部70の制御に従って、ホストコンピューター5との間で制御データを含む各種データを送受信する。
【0031】
次いで、小切手4を処理する際の複合処理装置1の基本的な動作について説明する。
上述したように、ストッカー15には、複数枚の小切手4を収納可能である。そして、本実施形態に係る複合処理装置1は、ストッカー15に収納された複数の小切手4について、所定のタイミングで、順次、搬送路W上に繰り出し、以下で説明する一連の処理を、各小切手4について連続して実行可能である。
【0032】
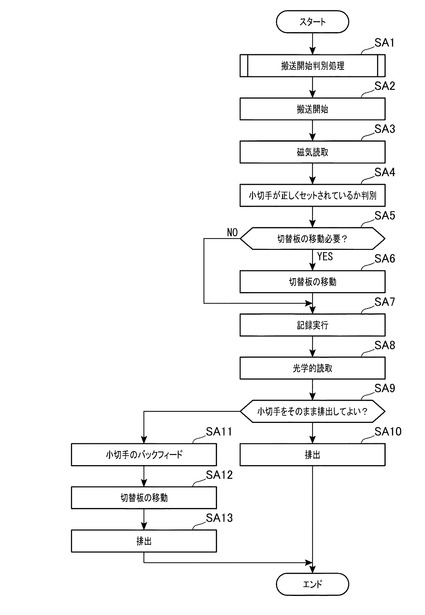
図4は、ストッカー15に収納された1枚の小切手4に対して実行される一連の処理を示すフローチャートである。
以下の説明の前提として、ホストコンピューター5から、処理対象となる1枚の小切手4を処理するために必要な制御コマンドやデータが、複合処理装置1に対して、過不足無く入力されているものとする。
また、以下の説明において、処理制御部70aは、CPUが制御プログラムを読み出して実行する等、ハードウェアとソフトウェアとの協働により実現される。
まず、複合処理装置1の制御部70の処理制御部70aは、ストッカー15に収納された小切手4のうち、次に処理対象となる小切手4について、搬送を開始するタイミングが到来したか否かを判別するための搬送開始判別処理を実行する(ステップSA1)。この搬送開始判別処理については、後に詳述する。
搬送開始判別処理の結果、搬送を開始するタイミングが到来したと判別すると、処理制御部70aは、ホッパー位置検出器32の検出値や、ASF用紙検出器31の検出値を監視しつつ、ホッパー駆動モーター26や、ASFモーター27を駆動して、ストッカー15に収納された小切手4のうち1枚を搬送路Wに送り出して、小切手4の搬送を開始する(ステップSA2)。
以後、処理制御部70aは、小切手4を略一定の速度で搬送しつつ、小切手4に対して各種処理を実行する。
次いで、処理制御部70aは、用紙長検出器38の検出値を監視することにより小切手4の位置を管理しつつ、MICRヘッド35によって、小切手4の磁気インク文字列4cを読み取る(ステップSA3)。
次いで、処理制御部70aは、MICRヘッド35の読み取り結果に基づいて、小切手4が上下または裏表が逆(上下裏表逆)にセットされることなく、正しくセットされているか否かを判別する(ステップSA4)。詳細には、処理制御部70aは、磁気インク文字列4cを構成する磁気インク文字について、磁気インク文字を読み取って得られる検出波形と、基準波形との比較による磁気インク文字認識を行って、磁気インク文字認識の成否により、小切手4が正しくセットされているか否かを判別する。
【0033】
次いで、処理制御部70aは、ステップSA4の判別結果に基づいて、切替板54を移動して、小切手4を排出するポケット19を切り替える必要があるか否かを判別する(ステップSA5)。
詳述すると、本実施形態では、小切手4が上下裏表逆にセットされることなく、正しくセットされている場合は、小切手4はメインポケット19aに排出され、一方、小切手4が正しくセットされていない場合は、小切手4はサブポケット19bに排出されるものとされている。さらに、本実施形態では、切替板54がいずれかのポケット19側に切り替えられた後は、例えば、予め定められたポケット19側に位置を戻したり、また、待機位置に切替板54を移動させたりすることなく、その状態が維持される構成とされている。
そして、ステップSA5では、小切手4が正しくセットされている場合において、現時点で切替板54がメインポケット19a側に位置していない場合は、切替板54を移動する必要があると判別され、また、小切手4が正しくセットされていない場合において、現時点で切替板54がサブポケット19b側に位置していない場合は、切替板54を移動する必要があると判別され、そして、それ以外の場合は、切替板54を移動する必要がないと判別される。
【0034】
ステップSA5において、切替板54を移動する必要があると判別した場合(ステップSA5:YES)、処理制御部70aは、切替板54を移動して、ステップSA4の判別に応じた適切なポケット19に小切手4が排出されるよう、小切手4を排出するポケット19を切り替え(ステップSA6)、処理手順をステップSA7へ移行する。
一方、切替板54を移動する必要がないと判別した場合(ステップSA5:NO)、処理制御部70aは、処理手順をステップSA7へ移行する。
なお、ステップSA5、SA6の処理は、以下のステップSA7〜SA8の処理と並行して実行される方が望ましい。
【0035】
次いで、処理制御部70aは、中間検出器46の検出値を監視することにより小切手4の位置を監視しつつ、搬送モーター42の駆動により各種モーターを駆動して小切手4を搬送し、インクジェットヘッド10により、小切手4の裏面4bに所定の画像を記録する(ステップSA7)。なお、小切手4が正しくセットされていない場合は、ステップSA7において、画像の記録を行わないようにしてもよい。
この小切手4への画像の記録に際し、処理制御部70aは、以下の処理を行う。
すなわち、オペレーターのミス、その他の要因により、小切手4の記録可能領域のサイズよりも、小切手4に記録すべき画像のサイズが大きく、小切手4に記録すべき画像の全てを小切手4に記録できない場合がある。この場合、処理制御部70aは、記録可能領域に収まる範囲で画像を記録した上で、処理を継続して実行する。これにより、小切手4の外側にインクが吐出されることを確実に防止しつつ、不必要にスループットが低下することを防止している。なお、画像の一部が記録されなかった場合であっても、小切手4の処理に係る機構、装置にエラーが発生しているわけではないため、継続して処理を実行可能である。
【0036】
次いで、処理制御部70aは、表面CISユニット47によって小切手4の表面4aを光学的に読み取ると共に、裏面CISユニット48によって裏面4bを光学的に読み取り、上述した方法によって読み取り結果をホストコンピューター5に出力する(ステップSA8)。なお、小切手4が正しくセットされていない場合は、ステップSA8において、小切手4の読み取りを行わないようにしてもよい。
本実施形態では、小切手4の先端が、スリット18が分岐する位置に至った時点で、ステップSA6における切替板54の移動が終了しているよう、処理制御部70aは、各種機構を制御する。
また、CISユニットと、スリット18が分岐する位置との関係上、CISユニットによる読み取りが終了した時点では、メインポケット19aに連通する分岐路、又は、サブポケット19bに連通する分岐路のいずれかに小切手4の一部が延出した状態となる。
【0037】
次いで、処理制御部70aは、ステップSA7における画像の記録の結果に応じて、小切手4を現在排出しようとしているポケット19にそのまま排出してよいか、それとも、排出するポケット19を他方のポケット19に変更する必要があるかを判別する(ステップSA9)。
詳述すると、本実施形態では、小切手4が正しくセットされている場合であっても、ステップSA7の小切手4への画像の記録において、小切手4に画像の一部を記録しなかった場合は、当該小切手4をサブポケット19bに排出し、他の小切手4と区別する構成となっている。これを踏まえ、ステップSA9において、処理制御部70aは、小切手4に画像の一部を記録しなかった場合であって、排出しようとしているポケット19がメインポケット19aである場合は、排出するポケット19を他方のポケット19(=サブポケット19b)に変更する必要があると判別し、それ以外の場合は、小切手4を現在排出しようとしているポケット19にそのまま排出してよいと判別する。
【0038】
ステップSA9において、小切手4を現在排出しようとしているポケット19にそのまま排出してよいと判別した場合(ステップSA9:YES)、処理制御部70aは、排出検出器52の検出値を監視することにより小切手4が正常に排出されたか否かを監視しつつ、搬送モーター42を駆動することにより各種モーターを駆動して小切手4をポケット19に排出する(ステップSA10)。
一方、ステップSA9において、排出するポケット19をサブポケット19bに変更する必要があると判別した場合(ステップSA9:NO)、処理制御部70aは、搬送モーター42を駆動することにより各種モーターを駆動して、小切手4の先端が搬送路W上の分岐路の上流側の所定の位置に至るまで、小切手4をバックフィードする(ステップSA1)。
次いで、処理制御部70aは、切替板54を移動して、小切手4が排出されるポケット19をサブポケット19bに切り替える(ステップSA12)。
次いで、処理制御部70aは、排出検出器52の検出値を監視することにより小切手4が正常に排出されたか否かを監視しつつ、搬送モーター42を駆動することにより各種モーターを駆動して小切手4をサブポケット19bに排出する(ステップSA13)。
【0039】
ところで、上述したように、複合処理装置1は、ストッカー15に収納された複数の小切手4について連続して処理できる構成となっている。そして、複数枚(例えば、100枚)の小切手4を処理する場合、処理を開始してから終了するまでに要する時間が非常に長くなる場合があるため、できるだけスループットを向上し、処理に要する時間を短くしたいとする強いニーズがある。また、このニーズに応えることにより、複合処理装置1の商品としての価値、魅力の向上や、顧客満足度、利便性の向上を効果的に図ることができる。
ここで、従来の複合処理装置1では、搬送路W上に小切手4が位置している場合には、当該小切手4についてポケット19への排出が完了した後に、ストッカー15に収納された次の小切手4の搬送を開始していた。ここに着目し、搬送路W上に小切手4が位置している状態で、次の小切手4の搬送を開始することができれば、次の小切手4の搬送を開始するタイミングを早めることができ、ひいてはスループットを向上することが可能である。しかしながら、搬送路W上に小切手4が位置している状態で、次の小切手4の搬送を開始する場合、搬送路W上に複数の小切手4が存在することとなるため、これに起因して何らかのエラー、不具合が発生することを確実に防止する必要がある。
以上を踏まえ、本実施形態に係る複合処理装置1は、以下の動作を実行する。
【0040】
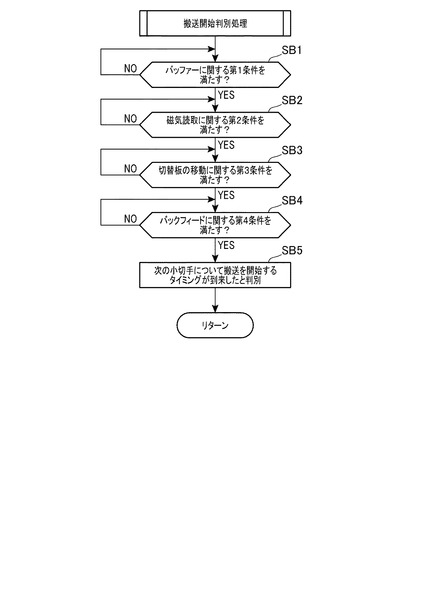
図5は、図4のステップSA1の搬送開始判別処理を詳細に示すフローチャートである。
上述したように、搬送開始判別処理は、当該処理の対象となる小切手4について、搬送を開始するタイミングが到来したか否かを判別する処理である。本実施形態に係る複合処理装置1は、以下のようにして、搬送を開始するタイミングが到来したか否かを判別することにより、搬送路W上に1又は複数の小切手4が位置している場合であっても、次の小切手4の搬送を開始することを可能としている。
また、以下の説明では、説明の便宜のため、図5のフローチャートの処理の開始時点で、搬送路W上に1又は複数の小切手4が位置している状態であるものとする。
【0041】
まず、複合処理装置1の制御部70の処理制御部70aは、搬送開始判別処理の対象となっている小切手4、すなわち、ストッカー15に収納された小切手4であって、搬送を開始するタイミングが到来したか否かの判別の対象となっている小切手4(以下、「処理対象小切手」という。)について、第1条件を満たすか否かを判別する(ステップSB1)。
第1条件とは、仮に現時点で小切手4の搬送を開始し、図4に示した各処理を順次実行し、ステップSA8において、その表面4a、及び、裏面4bを光学的に読み取ったとした場合に、それぞれの読み取り結果に係るデータを表面用バッファー77a及び裏面用バッファー77bに格納できる空き容量が各バッファーに確保されると予想されること、という条件である。
空き容量が確保されないと予想される場合に、小切手4の搬送を開始すると、図4のステップSA8において、表面4a及び裏面4bの光学的な読み取りを実行した際に、バッファーのオーバーフローが発生する。このため、空き容量が確保されないと予想される場合には、小切手4の搬送を開始することはできない。
これを踏まえ、処理制御部70aは、第1条件を満たさない場合は、表面用バッファー77a、裏面用バッファー77bのオーバーフローを防止すべく、第1条件を満たすか否かの監視を継続して実行する。
一方、処理制御部70aは、第1条件を満たす場合は、小切手4の搬送を介するための条件の1つが成立したとして、処理手順をステップSB2へ移行する。
なお、上記予想は、事前の実験やシミュレーションを踏まえて、既存のアルゴリズムを利用して適切に行われる。
【0042】
ステップSB2では、処理制御部70aは、第2条件を満たすか否かを判別する。
第2条件とは、搬送路W上に位置している全ての小切手4について、MICRヘッド35(磁気読取部)による読み取りが完了していること、という条件である。
ここで、ストッカー15に収納された小切手4を搬送路Wに送り出す場合、ホッパー駆動モーター26や、ASFモーター27、その他の小切手4の送り出しに係る機構の動作に伴って、MICRヘッド35による読み取りに悪影響を与えるノイズが発生する。そして、小切手4の送り出しは定期的に行われるものではなく、また、送り出しごとに発生するノイズの態様が異なるため、ノイズによる磁気的な読み取りへの悪影響の対策として、例えば、送り出しが行われる度に逆位相の信号によりノイズを除去する等の処置を行うことは適切でない。従って、第2条件を満たさない状態で、処理対象小切手の搬送を開始すると、当該処理対象小切手の送り出しに係る動作により、搬送路W上に位置する他の小切手4の磁気的な読み取りに悪影響を与える可能性がある。
以上を踏まえ、処理制御部70aは、第2条件を満たさない場合は、小切手4の搬送を開始できないとして、第2条件を満たすか否かの監視を継続して実行する。
一方、処理制御部70aは、第2条件を満たす場合は、小切手4の搬送を介するための条件の1つが成立したとして、処理手順をステップSB2へ移行する。
なお、処理制御部70aは、搬送路W上に位置している小切手4について、搬送路W上に設けられた各種センサーの検出値に基づいて、その位置を管理しており、MICRヘッド35による読み取りが終了したか否かを検出可能である。
また、搬送モーター42の駆動によるノイズは、搬送モーター42で一定の速度で回動するためそのノイズの態様が略一定であることを踏まえて、適切にそのノイズを低減する処理が行われる。
【0043】
ステップSB3では、処理制御部70aは、第3条件を満たすか否かを判別する。
第3条件とは、処理対象小切手の搬送を開始した場合に、搬送の開始後、搬送路W上に位置している全ての小切手4について、切替板54の移動が発生しないこと、という条件である。
ここで、切替板54の移動が行われる場合、当該移動に伴って、MICRヘッド35による読み取りに悪影響を与えるノイズが発生する。そして、切替板54の移動は定期的に行われるものではなく、また、切り替えに係る動作ごとに発生するノイズの態様が異なるため、ノイズによる磁気的な読み取りへの悪影響の対策として、例えば、切替板54の移動が行われる度に逆位相の信号によりノイズを除去する等の処置を行うことは適切でない。従って、第3条件を満たさない状態で、処理対象小切手の搬送を開始すると、当該処理対象小切手に対するMICRヘッド35による読み取り中に、他の小切手4についての切替板54の移動が発生し、当該読み取りに悪影響を与える可能性がある。
上述したように、本実施形態では、図4のステップSA4における小切手4が正しくセットされているか否かの判別の結果によって切替板54の移動が行われる場合があり(ステップSA6)、さらに、ステップSA7における画像の記録の結果によって切替板54の移動が行われる場合がある。これを踏まえ、処理制御部70aは、搬送路W上に位置する各小切手4について、ステップSA4の判別の結果、ステップSA7の画像の記録の結果(画像の全てが記録できたか否か)を取得すると共に、取得した結果に基づいて各小切手4について切替板54の移動が発生するか否かを判別する。各小切手4について切替板54の移動が発生しない場合は、第3条件を満たす。さらに、処理制御部70aは、いずれかの小切手4に切替板54の移動が発生する場合は、当該切替板54の移動が完了したか否かを判別する。実行すべき切替板54の移動が全て完了した場合は、第3条件を満たす。
処理制御部70aは、第3条件を満たさない場合は、小切手4の搬送を開始できないとして、第3条件を満たすか否かの監視を継続して実行する。
一方、処理制御部70aは、第3条件を満たす場合は、小切手4の搬送を介するための条件の1つが成立したとして、処理手順をステップSB4へ移行する。
なお、上記例では、ステップSA7の画像の記録が行われない限り、画像の記録の結果に基づく切替板54の移動が行われるか否かが判別できないため、搬送路W上に位置する各小切手4についてステップSA7の画像の記録が終了していることが第3条件を満たすための前提となる。ただし、本実施形態に係る複合処理装置1では、動作モードとして、小切手4に画像を記録する際に、画像の一部を記録しなかった場合であっても、排出するポケット19をサブポケット19bにしない動作モードがあり、当該動作モードの場合は、各小切手4に対して、ステップSA4の判別が行われていれば、第3条件を満たすための前提が揃うこととなる。
【0044】
ステップSB4では、処理制御部70aは、第4条件を満たすか否かを判別する。
第4条件とは、処理対象小切手の搬送を開始した場合に、搬送の開始後、搬送路W上に位置している全ての小切手4について、バックフィードが発生しないこと、という条件である。
ここで、搬送路W上に位置する小切手4についてバックフィードが発生した場合、搬送モーター42は、バックフィードのための動作を実行することとなるが、このバックフィードのための動作に起因して搬送路W上に位置する他の小切手4について何らかのエラーが発生する可能性がある。例えば、バックフィードが、他の小切手4がMICRヘッド35による読み取りを行っているときに行われた場合、当該他の小切手4へのMICRヘッド35による読み取りが正常に行われない事態を招く。
上述したように、本実施形態では、図4のステップSA7における画像の記録の結果によって小切手4のバックフィードが行われる場合がある。
これを踏まえ、処理制御部70aは、搬送路W上に位置する各小切手4について、ステップSA7の画像の記録の結果(画像の全てが記録できたか否か)を取得すると共に、取得した結果に基づいて各小切手4についてバックフィードが発生するか否かを判別する。各小切手4についてバックフィードが発生しない場合は、第4条件を満たす。さらに、処理制御部70aは、いずれかの小切手4にバックフィードが発生する場合は、当該バックフィードが完了したか否かを判別する。実行すべきバックフィードが全て完了した場合は、第4条件を満たす。
処理制御部70aは、第4条件を満たさない場合は、小切手4の搬送を開始できないとして、第4条件を満たすか否かの監視を継続して実行する。
一方、処理制御部70aは、第4条件を満たす場合は、小切手4の搬送を介するための条件の全てが成立したとして、処理手順をステップSB5へ移行する。
なお、上記例では、ステップSA7の画像の記録が行われない限り、画像の記録の結果に基づくバックフィードが行われるか否かが判別できないため、搬送路W上に位置する各小切手4についてステップSA7の画像の記録が終了していることが第4条件を満たすための前提となる。ただし、本実施形態に係る複合処理装置1では、動作モードとして、小切手4に画像を記録する際に、画像の一部を記録しなかった場合であっても、排出するポケット19をサブポケット19bにしない動作モードがあり、当該動作モードの場合は、バックフィードが行われることはないため、第4条件は常に満たされることとなる。
【0045】
ステップSA5では、処理制御部70aは、処理対象小切手について、搬送を開始するタイミングが到来したと判別し(ステップSB5)、サブルーチンとしての搬送開始判別処理を終了し、当該処理対象小切手について、図4のステップSA2以降の処理を順次実行する。
このように、本実施形態では、搬送路W上に位置している小切手4について、一連の処理が終了し、当該小切手4がポケット19に排出されたことをトリガーとして、ストッカー15に収納された次の小切手4の搬送を開始するのではなく、搬送路W上に小切手4が位置しているか否かにかかわらず、上述した第1〜4条件の全てを満たした時点で、次の小切手4を搬送するタイミングが到来したとして、当該次の小切手4の搬送を開始する。上述したように、これら第1〜4条件は、複数の小切手4が搬送路W上に位置した場合であっても、そのことに起因して何らかのエラーが発生しないようにするための必要最小限の条件である。このように、必要最小限の条件が満たされた場合に、次の小切手4について搬送を開始することにより、搬送路W上に他の小切手4が位置している状況であっても、可能な場合は、次の小切手4に対する搬送を開始することが可能となり、できるだけ早い段階で次の小切手4に対して搬送が開始されることとなり、ひいては、複数の小切手4の処理に係るスループットを効果的に向上することが可能となる。
【0046】
以上説明したように、本実施形態に係る複合処理装置1の処理制御部70aは、搬送路W上に位置している小切手4に対する処理の状況によって規定される条件が成立した場合に、搬送路W上に小切手4が位置しているか否かにかかわらず、ストッカー15に収納された次の小切手4について搬送を開始する。
これによれば、搬送路W上に位置している小切手4に対する一連の処理が完了したことを、次の小切手4の処理の開始のトリガーとするのではなく、小切手4に対する処理の状況によって規定される条件が成立したことを、次の小切手4の搬送の開始のトリガーとするため、搬送路W上に小切手4が位置している状況であっても、可能な場合は、次の小切手4に対する搬送を開始することが可能となり、できるだけ早い段階で次の小切手4に対して処理が開始されることとなり、複数の小切手4の処理に係るスループットを向上することが可能となる。
【0047】
また、本実施形態では、次の小切手4を搬送することの条件として、仮に現時点で小切手4の搬送を開始し、図4に示した各処理を順次実行し、ステップSA8において、その表面4a、及び、裏面4bを光学的に読み取ったとした場合に、それぞれの読み取り結果に係るデータを表面用バッファー77a及び裏面用バッファー77bに格納できる空き容量が各バッファーに確保されると予想されること、という第1条件が含まれている。
これにより、表面用バッファー77a、及び、裏面用バッファー77bのオーバーフローを的確に防止しつつ、次の小切手4の搬送が開始されるタイミングを早めることができ、複数の小切手4の処理に係るスループットを向上することが可能となる。
【0048】
また、本実施形態では、次の小切手4を搬送することの条件として、搬送路W上に位置している全ての小切手4について、MICRヘッド35(磁気読取部)による読み取りが完了していること、という第2条件が含まれている。
これによれば、次の小切手4の搬送を開始することに起因した他の小切手4についてのMICRヘッド35による読み取りへの悪影響を的確に防止しつつ、次の小切手4の搬送が開始されるタイミングを早めることができ、複数の小切手4の処理に係るスループットを向上することが可能となる。
【0049】
また、本実施形態では、次の小切手4を搬送することの条件として、当該次の小切手4の搬送を開始した場合に、搬送の開始後、搬送路W上に位置している全ての小切手4について、切替板54の移動が発生しないこと、という第3条件が含まれている。
これによれば、次の小切手4の搬送を開始した場合に、他の小切手4についての切替板54の移動に起因した、当該次の小切手4へのMICRヘッド35による読み取りへの悪影響を的確に防止しつつ、次の小切手4の搬送が開始されるタイミングを早めることができ、複数の小切手4の処理に係るスループットを向上することが可能となる。
【0050】
また、本実施形態では、次の小切手4を搬送することの条件として、当該次の小切手4の搬送を開始した場合に、搬送の開始後、搬送路W上に位置している全ての小切手4について、バックフィードが発生しないこと、という第4条件が含まれている。
これによれば、次の小切手4の搬送を開始した場合に、他の小切手4にバックフィードが発生し、それに起因して何らかのエラーが発生することを的確に防止しつつ、次の小切手4の搬送が開始されるタイミングを早めることができ、複数の小切手4の処理に係るスループットを向上することが可能となる。
【0051】
なお、上述した実施の形態は、あくまでも本発明の一態様を示すものであり、本発明の範囲内で任意に変形および応用が可能である。
例えば、上述した実施形態では、切替板54の移動が発生する場合や、バックフィードが発生する場合について、具体的に、例を挙げて説明したが、当該例に限らず、例えば、動作モードによってこれらが発生する条件やタイミングを変更できるようにしてもよい。すなわち、本願発明を適用すれば、どのような条件、タイミングで、切替板54の移動、バックフィードが発生する場合であっても、的確にこれらによる悪影響を排除した上で、スループットを向上可能である。
また例えば、上述した実施形態では、複合処理装置1は、搬送路W上に、MICRヘッド35、インクジェットヘッド10、及び、CISユニットが順次配置された構造であったが、装置の配置順番や、装置の具体的構造は、これに限らない。すなわち、本発明は、切替部、搬送部、磁気読取部、光学読取部を備える装置に広く適用可能である。
また例えば、図3に示す各機能ブロックはハードウェアとソフトウェアの協働により任意に実現可能であり、特定のハードウェア構成を示唆するものではない。
また例えば、制御部70の機能を、複合処理装置1に外部接続される別の装置に持たせるようにしてもよい。
また、外部接続される記憶媒体に記憶させたプログラムを実行することにより、図4、図5で示した各フローチャートの各ステップを実行するようにしてもよい。
【符号の説明】
【0052】
1…複合処理装置(媒体処理装置)、4…小切手(媒体)、5…ホストコンピューター(制御装置)、15…ストッカー(収納部)、19…ポケット(排出部)、19a…メインポケット(排出部)、19b…サブポケット(排出部)、27…ASFモーター(搬送部)、35…MICRヘッド(磁気読取部)、42…搬送モーター(搬送部)、47…表面CISユニット(光学読取部)、48…裏面CISユニット(光学読取部)、54…切替板(切替部)、55…切替板駆動モーター(切替部)、70…制御部(切替部、搬送部、磁気読取部、光学読取部)、70a…処理制御部、73…モータードライバー(搬送部)、74…読取制御回路(磁気読取部、光学読取部)、77a…表面用バッファー(バッファー)、77b…裏面用バッファー(バッファー)。
【技術分野】
【0001】
本発明は、媒体を連続して処理する媒体処理装置、当該媒体処理装置の制御方法、及び、当該媒体処理装置を制御するためのプログラムに関する。
【背景技術】
【0002】
従来、小切手等の媒体を搬送すると共に、搬送中、媒体を磁気的、光学的に読み取る媒体処理装置が知られている(例えば、特許文献1参照)。
この種の媒体処理装置では、収納部に複数の媒体を収納し、これら複数の媒体に対して、搬送、及び、読み取りを含む一連の処理を連続して実行するものがある。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2002−255393号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述した媒体処理装置のように、複数の媒体を連続して処理するものは、複数の媒体の処理に要する時間を短縮し、商品としての価値、魅力の向上や、ユーザーの満足度、利便性の向上を図ることを目的として、媒体を連続して処理可能な構成となっている。従って、このような媒体処理装置では、複数の媒体の処理に係るスループットをできるだけ向上したいとする強いニーズがある。
本発明は、上述した事情に鑑みてなされたものであり、複数の媒体を連続して処理する媒体処理装置について、複数の媒体の処理に係るスループットを向上することを目的とする。
【課題を解決するための手段】
【0005】
上記目的を達成するために、本発明は、複数の媒体を収納可能な収納部と、前記収納部に連通し、前記媒体を搬送する搬送路と、前記搬送路に連通可能であり、前記媒体が排出される複数の排出部と、前記媒体を排出する前記排出部を切り替える切替部と、前記収納部から前記搬送路を経由して前記排出部へ、前記媒体を搬送する搬送部と、前記搬送路に配置され、前記搬送部により搬送される前記媒体の情報を読み取る読取部と、前記切替部、前記搬送部、及び、前記読取部を制御して、前記収納部に収納された複数の前記媒体に対して、前記収納部から前記排出部への搬送、及び、搬送中の前記媒体に対する前記読取部による読み取りを含む一連の処理を、連続して実行する処理制御部と、を備え、前記処理制御部は、前記搬送路上に位置している前記媒体に対する、前記切替部、前記搬送部、及び、前記読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立した場合に、前記搬送路上に前記媒体が位置しているか否かにかかわらず、前記収納部に収納された次の前記媒体について前記搬送部による搬送を開始することを特徴とする。
ここで、収納部に収納された複数の媒体について、1の媒体に対する一連の処理の開始後、できるだけ早い段階で次の媒体に対して一連の処理を開始できれば、複数の媒体の処理に係るスループットを向上することが可能である。これを踏まえ、上記構成によれば、搬送路上に位置している媒体に対する一連の処理が完了したことを、次の媒体の処理の開始のトリガーとするのではなく、切替部、搬送部、及び、読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立したことを、次の媒体の処理の開始のトリガーとするため、搬送路上に媒体が位置している状況であっても、可能な場合は、次の媒体に対する処理を開始することが可能となり、できるだけ早い段階で次の媒体に対して処理が開始されることとなり、複数の媒体の処理に係るスループットを向上することが可能となる。
【0006】
また、本発明は、前記読取部は、前記搬送部により搬送される前記媒体を磁気的に読み取る磁気読取部と、光学的に読み取る光学読取部と、を含み、前記処理制御部は、前記搬送路上に位置している前記媒体に対する、前記切替部、前記搬送部、前記磁気読取部、及び、前記光学読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立した場合に、前記搬送路上に前記媒体が位置しているか否かにかかわらず、前記収納部に収納された次の前記媒体について前記搬送部による搬送を開始することを特徴とする。
この構成によれば、搬送路上に位置している媒体に対する一連の処理が完了したことを、次の媒体の処理の開始のトリガーとするのではなく、切替部、搬送部、磁気読取部、及び、光学読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立したことを、次の媒体の処理の開始のトリガーとするため、搬送路上に媒体が位置している状況であっても、可能な場合は、次の媒体に対する処理を開始することが可能となり、できるだけ早い段階で次の媒体に対して処理が開始されることとなり、複数の媒体の処理に係るスループットを向上することが可能となる。
【0007】
また、本発明は、前記光学読取部による読み取り結果に係るデータを収容するバッファーを、備え、前記光学読取部は、読み取り結果に係るデータをバッファーに格納し、格納した前記データを、接続された制御装置に転送し、前記所定の条件には、前記収納部に収納された次の前記媒体を前記光学読取部で読み取った場合に、読み取り結果に係る前記データを前記バッファーに格納できること、という条件が含まれていることを特徴とする。
この構成によれば、収納部に収納された媒体の搬送を開始する条件に、当該媒体を読取部で読み取った場合に、読み取り結果に係るデータをバッファーに格納できること、という条件が含まれているため、当該媒体について、空き領域が確保できない等の理由により読取部による読み取り結果に係るデータをバッファーに格納できない状態で搬送が開始されることを的確に防止しつつ、当該媒体の搬送が開始されるタイミングを早めることができ、複数の媒体の処理に係るスループットを向上することが可能となる。
【0008】
また、本発明は、前記所定の条件には、前記搬送路上に位置している前記媒体について、前記磁気読取部による読み取りが終了していること、という条件が含まれていることを特徴とする。
ここで、収納部に収納された媒体を搬送路に送り出す場合、送り出しに係る動作に伴って、磁気読取部による読み取りに悪影響を与えるノイズが発生する。そして、媒体の送り出しは定期的に行われるものではなく、また、送り出しごとに発生するノイズの態様が異なるため、ノイズによる磁気的な読み取りへの悪影響の対策として、例えば、送り出しが行われる度に逆位相の信号によりノイズを除去する等の処置を行うことは適切でない。以上を踏まえ、上記構成によれば、収納部に収納された媒体の搬送を開始する条件に、搬送路上に位置している媒体について、少なくとも、磁気読取部による読み取りが終了していること、という条件が含まれているため、収納部に収納された媒体を送り出すことに起因して磁気読取部による読み取りに悪影響が及ぶことを防止した上で、当該媒体の搬送が開始されるタイミングを早めることができ、複数の媒体の処理に係るスループットを向上することが可能となる。
【0009】
また、本発明は、前記処理制御部は、前記搬送路上に位置している前記媒体に対する所定の処理の結果に応じて、前記切替部によって前記搬送路上に設けられた切替板を移動し、又は、移動しないことにより前記媒体が排出される前記排出部を前記所定の処理の結果に応じた前記排出部に切り替え、前記所定の条件には、前記収納部に収納された次の前記媒体の搬送を開始した後に、前記搬送路上に位置している前記媒体について、前記切替板の移動が発生しないこと、という条件が含まれていることを特徴とする。
ここで、切替板の移動が行われる場合、当該移動に伴って、磁気読取部による読み取りに悪影響を与えるノイズが発生する。そして、切替板の移動は定期的に行われるものではなく、また、送り出しごとに発生するノイズの態様が異なるため、ノイズによる磁気的な読み取りへの悪影響の対策として、例えば、切替板の移動が行われる度に逆位相の信号によりノイズを除去する等の処置を行うことは適切でない。以上を踏まえ、上記構成によれば、収納部に収納された媒体の搬送を開始する条件に、搬送路上に位置している媒体について、切替板の移動が発生しないこと、という条件が含まれているため、収納部に収納された媒体に対して磁気読取部による読み取り中に切替板の移動が発生し、これにより、磁気読取部による読み取りに悪影響が及ぶことを防止した上で、当該媒体の搬送が開始されるタイミングを早めることができ、複数の媒体の処理に係るスループットを向上することが可能となる。
【0010】
また、本発明は、前記処理制御部は、前記切替部による切り替え後の前記排出部に前記媒体を排出すべく、前記媒体をバックフィード可能に構成され、前記所定の条件には、前記収納部に収納された次の前記媒体の搬送を開始した後に、前記搬送路上に位置している前記媒体について、前記バックフィードが発生しないこと、という条件が含まれていることを特徴とする。
この構成によれば、収納部に収納された媒体の搬送を開始する条件に、搬送路上に位置している媒体について、バックフィードが発生しないこと、という条件が含まれているため、収納部に収納された媒体を搬送路に送り出して処理を開始した後、搬送路上に位置する他の媒体についてバックフィードが発生し、これに起因して何らかのエラーが発生することを防止できる。
【0011】
また、上記目的を達成するために、本発明は、複数の媒体を収納可能な収納部と、前記収納部に連通し、前記媒体を搬送する搬送路と、前記搬送路に連通可能であり、前記媒体が排出される複数の排出部と、前記媒体を排出する前記排出部を切り替える切替部と、前記収納部から前記搬送路を経由して前記排出部へ、前記媒体を搬送する搬送部と、前記搬送路に配置され、前記搬送部により搬送される前記媒体の情報を読み取る読取部と、を備える媒体処理装置の制御方法であって、前記搬送路上に位置している前記媒体に対する、前記切替部、前記搬送部、及び、前記読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立したか否かを判別し、成立した場合に前記搬送路上に前記媒体が位置しているか否かにかかわらず、前記収納部に収納された次の前記媒体について前記搬送部による搬送を開始することを特徴とする。
この制御方法によれば、搬送路上に位置している媒体に対する一連の処理が完了したことを、次の媒体の処理の開始のトリガーとするのではなく、切替部、搬送部、及び、読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立したことを、次の媒体の処理の開始のトリガーとするため、搬送路上に媒体が位置している状況であっても、可能な場合は、次の媒体に対する処理を開始することが可能となり、できるだけ早い段階で次の媒体に対して処理が開始されることとなり、複数の媒体の処理に係るスループットを向上することが可能となる。
【0012】
また、本発明は、前記読取部は、前記搬送部により搬送される前記媒体を磁気的に読み取る磁気読取部と光学的に読み取る光学読取部と、含み、前記搬送路上に位置している前記媒体に対する、前記切替部、前記搬送部、前記磁気読取部、及び、前記光学読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立したか否かを判別し、成立した場合に前記搬送路上に前記媒体が位置しているか否かにかかわらず、前記収納部に収納された次の前記媒体について前記搬送部による搬送を開始することを特徴とする。
この制御方法によれば、搬送路上に位置している媒体に対する一連の処理が完了したことを、次の媒体の処理の開始のトリガーとするのではなく、切替部、搬送部、磁気読取部、及び、光学読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立したことを、次の媒体の処理の開始のトリガーとするため、搬送路上に媒体が位置している状況であっても、可能な場合は、次の媒体に対する処理を開始することが可能となり、できるだけ早い段階で次の媒体に対して処理が開始されることとなり、複数の媒体の処理に係るスループットを向上することが可能となる。
【0013】
また、上記目的を達成するために、本発明は、複数の媒体を収納可能な収納部と、前記収納部に連通し、前記媒体を搬送する搬送路と、前記搬送路に連通可能であり、前記媒体が排出される複数の排出部と、前記媒体を排出する前記排出部を切り替える切替部と、前記収納部から前記搬送路を経由して前記排出部へ、前記媒体を搬送する搬送部と、前記搬送路に配置され、前記搬送部により搬送される前記媒体の情報を読み取る読取部と、を備える媒体処理装置の各部を制御する制御部により実行されるプログラムであって、前記制御部を、前記搬送路上に位置している前記媒体に対する、前記切替部、前記搬送部、前記読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立した場合に、前記搬送路上に前記媒体が位置しているか否かにかかわらず、前記収納部に収納された次の前記媒体について前記搬送部による搬送を開始する処理制御部として機能させることを特徴とする。
このプログラムを実行すれば、搬送路上に位置している媒体に対する一連の処理が完了したことを、次の媒体の処理の開始のトリガーとするのではなく、切替部、搬送部、磁気読取部、及び、光学読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立したことを、次の媒体の処理の開始のトリガーとするため、搬送路上に媒体が位置している状況であっても、可能な場合は、次の媒体に対する処理を開始することが可能となり、できるだけ早い段階で次の媒体に対して処理が開始されることとなり、複数の媒体の処理に係るスループットを向上することが可能となる。
【発明の効果】
【0014】
本発明によれば、複数の媒体を連続して処理する媒体処理装置について、複数の媒体の処理に係るスループットを向上することができる。
【図面の簡単な説明】
【0015】
【図1】複合処理装置の外観斜視図である。
【図2】複合処理装置の内部構造を示す図である。
【図3】複合処理装置の機能的構成を示すブロック図である。
【図4】複合処理装置の動作を示すフローチャートである。
【図5】複合処理装置の動作を示すフローチャートである。
【発明を実施するための形態】
【0016】
以下、図面を参照して本発明の実施形態について説明する。
図1は、本実施の形態に係る複合処理装置1(媒体処理装置)の外観斜視図である。
複合処理装置1は、読取対象媒体であるシート状の小切手4(媒体)や帳票類に対し、この読取対象物に記録された磁気インク文字の読み取り、読取対象物の両面の光学的読み取り、及び、当該読取対象物への画像の記録を行う装置である。また、複合処理装置1は、クレジットカード等のカード型の媒体に記録された磁気情報を読み取るリーダーとしての機能、及び、感熱ロール紙に画像を記録して切断することにより、画像が記録された所定の紙片を発行する機能を備えている。
【0017】
本実施形態では、読取対象物として小切手4を処理する場合を例に挙げて説明する。小切手4は、図1に示すように、所定の模様や装飾が施されたシートに金額、振出人、通し番号、サインなどが記録された帳票である。これら金額、振出人、通し番号、サインなどは表面4aに記録される。小切手4の表面4aには小切手4の長辺方向に延びる磁気インク文字列4cが形成されている。磁気インク文字列4cは、磁気インクで印刷された複数の磁気インク文字(MICR文字)が並んだものであり、磁気的または光学的に読み取ることができる。
小切手4の裏面4bには裏書き欄が設けられている。この裏書き欄には、後述するインクジェットヘッド10によって、裏書きに係る画像が記録される。小切手4の短辺方向及び長辺方向のサイズは規格化されているものの、多様な規格が存在するため、実際には様々なサイズがある。複合処理装置1では、一般的な小切手4のサイズをほぼ包含し得る最大サイズを規定し、この最大サイズ内の小切手4であれば処理できる。
【0018】
複合処理装置1は、本体下部を覆う下部ケース11、及び下部ケース11に被せられるカバー12からなる外装を有し、外装の内部に複合処理装置1の本体13が収容されている。複合処理装置1の前面には、小切手4を挿入する挿入口14が開口しており、挿入口14の奥には複数の小切手4を積層して収納できるストッカー15(収納部)が設けられている。このストッカー15は、前面側へ向かって引き出し自在に構成されており、ストッカー15に収納すべき小切手4のサイズに応じてストッカー15を引き出した上で、このストッカー15に小切手4を収納させることが可能である。
また、カバー12には、上面視で略U字形状に、小切手4の搬送路Wとなるスリット18が形成されている。スリット18は、上述したストッカー15に連通すると共に、スリット18は複合処理装置1の前面側に設けられたポケット19(排出部)に連通している。ストッカー15に収納された小切手4は、後述するように1枚ずつ複合処理装置1の内部に取り込まれ、スリット18を通る間に処理されて、処理後の小切手4はポケット19に排出される。ポケット19には複数の小切手4を収納することができる。
図1に示すように、ストッカー15の側方には、磁気カードリーダーユニット20が設けられている。磁気カードリーダーユニット20は、カバー12に形成されたカードスリット21と、このカードスリット21に対応して設けられたMCRヘッド22(図3)とを備え、カードスリット21を通るカード類に磁気的に記録された情報をMCRヘッド22によって読み取る。
【0019】
図2は、複合処理装置1の外装内部に収容されている本体13の構成を示す平面図である。ストッカー15の一側面にはホッパー25が設けられている。このホッパー25は、ホッパー駆動モーター26(図3)により、図中矢印方向に回動可能に構成されており、ストッカー15に貯留された小切手4を他方の側面側に付勢する。
ストッカー15の他方の側面には、後述するASF(Automatically Sheet Feeder)モーター27(図3)により駆動されるピックアップローラー28が配置されており、ホッパー25がピックアップローラー28側に回動すると、この回動に応じてストッカー15内の小切手4のうち1枚がピックアップローラー28に付勢され、当該ローラーに接触して、当該ローラーの回転に応じて搬送路Wに引き込まれる。
ストッカー15の奥には、一対のローラーで構成されるASFローラー29が配置されている。ASFローラー29の2つのローラーは、搬送路Wの両側に配置され、一方は後述するASFモーター27の動力により回転し、他方のローラーは従動ローラーである。ピックアップローラー28に接した小切手4はASFローラー29に挟まれて、スリット18内を下流側へ搬送される。
【0020】
ストッカー15の所定の位置には、ASF用紙検出器31(図3)が設けられている。ASF用紙検出器31は、例えば透過型光センサーで構成され、ストッカー15における小切手4の有無を検出する。
また、ストッカー15において、ホッパー25の待機位置には、ホッパー位置検出器32(図3)が設けられている。ホッパー位置検出器32は、例えば透過型光センサーで構成され、ホッパー25が待機位置に位置しているか否かを検出する。
ASFローラー29の下流側には、小切手4の表面4aに接して磁気インク文字列4c(図1)を磁気的に読み取るMICR(Magnetic Ink Character Recognition)ヘッド35が配置されている。MICRヘッド35には、MICRローラー36が対向配置される。MICRローラー36はMICRヘッド35側に付勢されており、小切手4をMICRヘッド35に押しつけながら回転して、小切手4を、MICR文字の読み取りに適した定速で搬送する。MICRヘッド35の上流側には、ASFローラー29により繰り出された小切手4をMICRヘッド35に案内する、一対のローラーからなるアシストローラー37が配置されている。
【0021】
また、搬送路W上においてアシストローラー37とMICRヘッド35との間には、用紙長検出器38が配置されている。用紙長検出器38は、例えば反射型光センサーで構成され、搬送路W上を通る小切手4の検出位置における有無を検出することにより、小切手4の先端及び後端を検出する。用紙長検出器38の検出値は後述する制御部70により取得され、この検出値の変化に基づいて小切手4の長さが求められる。
搬送路W上でMICRヘッド35の下流側には、搬送路Wを挟んで対向する一対のローラーを有する第1搬送ローラー40が設けられ、さらに、この第1搬送ローラー40の下流側には第2搬送ローラー41が設けられている。これら第1搬送ローラー40、及び、第2搬送ローラー41は、搬送モーター42(図3)によって回転駆動されるローラーであり、これらローラーによって小切手4はインクジェットプリンターユニット44へ搬送される。
【0022】
インクジェットプリンターユニット44は、インクジェットヘッド10を備えている。インクジェットヘッド10は、本体13の前部に収容されているインクカートリッジ45からインクの供給を受けて、小切手4にインクを吐出するインクジェット方式の記録ヘッドである。このインクジェットヘッド10は、いわゆるラインインクジェットヘッドであり、小切手4に対する記録の際は、一定の速度で搬送される小切手4の裏面4bに対して、固定された状態のインクジェットヘッド10からインクが吐出されて、画像が記録される。この小切手4の裏面4bに記録される画像は、いわゆる裏書きと呼ばれる文字や記号等である。
インクジェットヘッド10の上流側であって、インクジェットヘッド10と、第2搬送ローラー41との間には、中間検出器46が設けられている。中間検出器46は、例えば反射型光センサーで構成され、検出位置における小切手4の有無を検出する。
【0023】
インクジェットヘッド10の下流には、小切手4を光学的に読み取るCIS(Contact Image Sensor)ユニットが配置されている。このCISユニットは、小切手4の表面4aを読み取る表面CISユニット47と、裏面4bを読み取る裏面CISユニット48とを有し、小切手4の両面を光学的に読み取り可能である。表面CISユニット47と裏面CISユニット48は搬送路Wを挟んで対向配置されており、これらユニットの上流側には第1CISローラー50が配置され、また、下流側には第2CISローラー51が配置されている。これら第1CISローラー50、及び、第2CISローラー51は、搬送モーター42によって回転駆動されるローラーであり、これらローラーによってCISユニットによって読み取り中の小切手4が安定して搬送される。
第2CISローラー51の下流には、排出検出器52が設けられている。排出検出器52は、例えば反射型光センサーで構成され、検出位置における小切手4の有無を検出する。
【0024】
表面CISユニット47、裏面CISユニット48の下流側には上述したポケット19が設けられている。ポケット19は、メインポケット19a(排出部)と、サブポケット19b(排出部)とに区画されており、スリット18が分岐して、それぞれのポケット19に連通している。これらメインポケット19a、及び、サブポケット19bには、それぞれ複数の小切手4を収納できる。
そして、スリット18が分岐した位置には、小切手4を排出すべきポケット19を、メインポケット19aとサブポケット19bとのいずれかに切り替える切替板54が配置されている。切替板54は、メインポケット19aに連通する経路とサブポケット19bに連通する経路のいずれか一方を塞ぐことで小切手4を他方に案内するガイドであり、切替板駆動モーター55によって駆動される。切替板54からメインポケット19aに繋がる経路には排出ローラー56が設けられ、また、切替板54からサブポケット19bに繋がる経路には排出ローラー57が設けられており、小切手4は、これらローラーにより切替板54に案内されたいずれかのポケット19にスムーズに排出される。
後述するように、複合処理装置1は、MICRヘッド35による磁気インク文字列4cの読み取り結果に基づいて、小切手4が正しくセットされていると判別した場合は、小切手4をメインポケット19aに排出し、一方、小切手4が正しくセットされていないと判別した場合は、サブポケット19bに排出する。
【0025】
また、図1及び図2に示すように、複合処理装置1の中央部には、画像が記録された紙片を発行するサーマルプリンターユニット60が設けられている。
図1に示すように、サーマルプリンターユニット60は、ユニット本体の上部を覆うプリンターカバー61を備えている。このプリンターカバー61は、カバー12に対して開閉自在に取り付けられており、プリンターカバー61を開くと、感熱ロール紙を収容可能な空間であるロール紙収容部62(図3)が露出し、感熱ロール紙の補充や交換が可能となる。プリンターカバー61には、排紙口63が形成されており、ロール紙収容部62に収容された感熱ロール紙は、排紙口63を介して、排出される。
サーマルプリンターユニット60は、ロール紙収容部62に収容した感熱ロール紙を繰り出して搬送路上を搬送させるローラー状のプラテン(不図示)と、プラテンに対向配置されたサーマルヘッド65(図3)と、搬送方向に対し直交する方向に感熱ロール紙を切断するカッターユニット66とを備えている。紙片の発行に際し、サーマルプリンターユニット60は、プラテンを駆動して感熱ロール紙を搬送方向に搬送しつつ、サーマルヘッド65により感熱ロール紙に画像を記録し、カッターユニット66によって所定の位置で感熱ロール紙を切断することにより、紙片を発行する。
【0026】
図3は、複合処理装置1とホストコンピューター5(制御装置)とを接続して構成される読取システム8の機能的構成を示すブロック図である。
複合処理装置1は、複合処理装置1全体を制御するCPU、RAM、フラッシュROM等により構成される制御部70と、インクジェットプリンターユニット44及びサーマルプリンターユニット60を制御するプリンター制御部71と、ヘッド駆動回路72と、モータードライバー73と、読取制御回路74と、センサー駆動回路75と、インターフェイス部76とを有し、これらの各部は相互に通信可能に接続されている。
【0027】
制御部70は、フラッシュROMに記憶されている制御プログラムをCPUにより読み出して実行することにより、複合処理装置1の各部を制御する。制御部70には、RAM77が接続されており、このRAM77には、表面用バッファー77a(バッファー)、及び、裏面用バッファー77b(バッファー)が形成されているが、これらについては後述する。
プリンター制御部71は、制御部70の制御の下、ヘッド駆動回路72を介してインクジェットヘッド10に駆動電流を供給し、小切手4への記録を行う。また、プリンター制御部71は、制御部70の制御の下、ヘッド駆動回路72を介してサーマルヘッド65に駆動電流を供給し、感熱ロール紙への記録を行う。
モータードライバー73は、ホッパー駆動モーター26に接続され、制御部70の制御に従ってホッパー25を回動させる。また、モータードライバー73は、ASFモーター27、及び、搬送モーター42に接続され、これら各モーターに駆動電流や駆動パルスを出力して、制御部70の制御に従いこれらモーターを動作させて、これらモーターに接続されたローラーを駆動する。
これら制御部70や、モータードライバー73、ホッパー駆動モーター26、ホッパー25、ASFモーター27、搬送モーター42、これらモーターに接続されたローラー、その他の機構、装置が協働して、ストッカー15(収納部)に収納された媒体を、ストッカー15(収納部)に連通する搬送路W上を搬送させ、搬送路Wにそれぞれ連通するメインポケット19a、サブポケット19b(複数の排出部)のいずれかに排出する搬送部として機能する。
また、モータードライバー73は、切替板駆動モーター55に接続され、制御部70の制御の下当該モーターに駆動電流や駆動パルスを出力することによって切替板54を移動させ、小切手4が排出されるポケット19を、メインポケット19a側、又は、サブポケット19b側に切り替える。これら制御部70や、モータードライバー73,切替板駆動モーター55、切替板54、その他の機構、装置が協働して、小切手4(媒体)が排出されるポケット19(排出部)を切り替える切替部として機能する。
【0028】
読取制御回路74は、MCRヘッド22、MICRヘッド35、表面CISユニット47、及び、裏面CISユニット48に接続されている。
読取制御回路74は、制御部70の制御に従って、カードスリット21(図1)にカード類が通される際にMCRヘッド22によって磁気情報を読み取らせ、MCRヘッド22が出力する読取信号をデジタル化して制御部70に出力する。
また、読取制御回路74は、制御部70の制御に従って、MICRヘッド35によって磁気情報を読み取らせ、MICRヘッド35が出力する読取信号をデジタル化して制御部70に出力する。制御部70や、読取制御回路74、MICRヘッド35、その他の機構、装置が協働して磁気読取部として機能する。
【0029】
また、読取制御回路74は、制御部70の制御に従って、表面CISユニット47及び裏面CISユニット48に、小切手4の表面4a及び裏面4bの読み取りを実行させる。
詳述すると、制御部70は、表面CISユニット47を制御して、小切手4の表面4aを光学的に読み取らせると共に、読み取り結果に係るデータを、順次、RAM77の表面用バッファー77aに書き込む。この書き込みと併せて、制御部70は、表面用バッファー77aに書き込まれたデータを順次読み出してホストコンピューター5に転送する。同様にして、制御部70は、裏面CISユニット48により小切手4の裏面4bを光学的に読み取る。
ここで、表面用バッファー77aの記憶領域のうち、書き込まれた後、転送されていないデータが記憶された記憶領域は、新たにデータを書き込むことはできない。従って、当該記憶領域以外の記憶領域の容量が、表面用バッファー77aの空き容量となる。裏面用バッファー77bについても同様である。
制御部70や、表面CISユニット47、裏面CISユニット48、その他の装置、機構が協働して光学読取部として機能する。
【0030】
センサー駆動回路75は、ASF用紙検出器31、ホッパー位置検出器32、用紙長検出器38、中間検出器46、及び、排出検出器52に接続され、これらの各検出器に電流を供給して、所定周期で出力値を取得し、取得した出力値をデジタルデータに変換して制御部70に出力する。
インターフェイス部76は、ホストコンピューター5に対して有線または無線で接続され、制御部70の制御に従って、ホストコンピューター5との間で制御データを含む各種データを送受信する。
【0031】
次いで、小切手4を処理する際の複合処理装置1の基本的な動作について説明する。
上述したように、ストッカー15には、複数枚の小切手4を収納可能である。そして、本実施形態に係る複合処理装置1は、ストッカー15に収納された複数の小切手4について、所定のタイミングで、順次、搬送路W上に繰り出し、以下で説明する一連の処理を、各小切手4について連続して実行可能である。
【0032】
図4は、ストッカー15に収納された1枚の小切手4に対して実行される一連の処理を示すフローチャートである。
以下の説明の前提として、ホストコンピューター5から、処理対象となる1枚の小切手4を処理するために必要な制御コマンドやデータが、複合処理装置1に対して、過不足無く入力されているものとする。
また、以下の説明において、処理制御部70aは、CPUが制御プログラムを読み出して実行する等、ハードウェアとソフトウェアとの協働により実現される。
まず、複合処理装置1の制御部70の処理制御部70aは、ストッカー15に収納された小切手4のうち、次に処理対象となる小切手4について、搬送を開始するタイミングが到来したか否かを判別するための搬送開始判別処理を実行する(ステップSA1)。この搬送開始判別処理については、後に詳述する。
搬送開始判別処理の結果、搬送を開始するタイミングが到来したと判別すると、処理制御部70aは、ホッパー位置検出器32の検出値や、ASF用紙検出器31の検出値を監視しつつ、ホッパー駆動モーター26や、ASFモーター27を駆動して、ストッカー15に収納された小切手4のうち1枚を搬送路Wに送り出して、小切手4の搬送を開始する(ステップSA2)。
以後、処理制御部70aは、小切手4を略一定の速度で搬送しつつ、小切手4に対して各種処理を実行する。
次いで、処理制御部70aは、用紙長検出器38の検出値を監視することにより小切手4の位置を管理しつつ、MICRヘッド35によって、小切手4の磁気インク文字列4cを読み取る(ステップSA3)。
次いで、処理制御部70aは、MICRヘッド35の読み取り結果に基づいて、小切手4が上下または裏表が逆(上下裏表逆)にセットされることなく、正しくセットされているか否かを判別する(ステップSA4)。詳細には、処理制御部70aは、磁気インク文字列4cを構成する磁気インク文字について、磁気インク文字を読み取って得られる検出波形と、基準波形との比較による磁気インク文字認識を行って、磁気インク文字認識の成否により、小切手4が正しくセットされているか否かを判別する。
【0033】
次いで、処理制御部70aは、ステップSA4の判別結果に基づいて、切替板54を移動して、小切手4を排出するポケット19を切り替える必要があるか否かを判別する(ステップSA5)。
詳述すると、本実施形態では、小切手4が上下裏表逆にセットされることなく、正しくセットされている場合は、小切手4はメインポケット19aに排出され、一方、小切手4が正しくセットされていない場合は、小切手4はサブポケット19bに排出されるものとされている。さらに、本実施形態では、切替板54がいずれかのポケット19側に切り替えられた後は、例えば、予め定められたポケット19側に位置を戻したり、また、待機位置に切替板54を移動させたりすることなく、その状態が維持される構成とされている。
そして、ステップSA5では、小切手4が正しくセットされている場合において、現時点で切替板54がメインポケット19a側に位置していない場合は、切替板54を移動する必要があると判別され、また、小切手4が正しくセットされていない場合において、現時点で切替板54がサブポケット19b側に位置していない場合は、切替板54を移動する必要があると判別され、そして、それ以外の場合は、切替板54を移動する必要がないと判別される。
【0034】
ステップSA5において、切替板54を移動する必要があると判別した場合(ステップSA5:YES)、処理制御部70aは、切替板54を移動して、ステップSA4の判別に応じた適切なポケット19に小切手4が排出されるよう、小切手4を排出するポケット19を切り替え(ステップSA6)、処理手順をステップSA7へ移行する。
一方、切替板54を移動する必要がないと判別した場合(ステップSA5:NO)、処理制御部70aは、処理手順をステップSA7へ移行する。
なお、ステップSA5、SA6の処理は、以下のステップSA7〜SA8の処理と並行して実行される方が望ましい。
【0035】
次いで、処理制御部70aは、中間検出器46の検出値を監視することにより小切手4の位置を監視しつつ、搬送モーター42の駆動により各種モーターを駆動して小切手4を搬送し、インクジェットヘッド10により、小切手4の裏面4bに所定の画像を記録する(ステップSA7)。なお、小切手4が正しくセットされていない場合は、ステップSA7において、画像の記録を行わないようにしてもよい。
この小切手4への画像の記録に際し、処理制御部70aは、以下の処理を行う。
すなわち、オペレーターのミス、その他の要因により、小切手4の記録可能領域のサイズよりも、小切手4に記録すべき画像のサイズが大きく、小切手4に記録すべき画像の全てを小切手4に記録できない場合がある。この場合、処理制御部70aは、記録可能領域に収まる範囲で画像を記録した上で、処理を継続して実行する。これにより、小切手4の外側にインクが吐出されることを確実に防止しつつ、不必要にスループットが低下することを防止している。なお、画像の一部が記録されなかった場合であっても、小切手4の処理に係る機構、装置にエラーが発生しているわけではないため、継続して処理を実行可能である。
【0036】
次いで、処理制御部70aは、表面CISユニット47によって小切手4の表面4aを光学的に読み取ると共に、裏面CISユニット48によって裏面4bを光学的に読み取り、上述した方法によって読み取り結果をホストコンピューター5に出力する(ステップSA8)。なお、小切手4が正しくセットされていない場合は、ステップSA8において、小切手4の読み取りを行わないようにしてもよい。
本実施形態では、小切手4の先端が、スリット18が分岐する位置に至った時点で、ステップSA6における切替板54の移動が終了しているよう、処理制御部70aは、各種機構を制御する。
また、CISユニットと、スリット18が分岐する位置との関係上、CISユニットによる読み取りが終了した時点では、メインポケット19aに連通する分岐路、又は、サブポケット19bに連通する分岐路のいずれかに小切手4の一部が延出した状態となる。
【0037】
次いで、処理制御部70aは、ステップSA7における画像の記録の結果に応じて、小切手4を現在排出しようとしているポケット19にそのまま排出してよいか、それとも、排出するポケット19を他方のポケット19に変更する必要があるかを判別する(ステップSA9)。
詳述すると、本実施形態では、小切手4が正しくセットされている場合であっても、ステップSA7の小切手4への画像の記録において、小切手4に画像の一部を記録しなかった場合は、当該小切手4をサブポケット19bに排出し、他の小切手4と区別する構成となっている。これを踏まえ、ステップSA9において、処理制御部70aは、小切手4に画像の一部を記録しなかった場合であって、排出しようとしているポケット19がメインポケット19aである場合は、排出するポケット19を他方のポケット19(=サブポケット19b)に変更する必要があると判別し、それ以外の場合は、小切手4を現在排出しようとしているポケット19にそのまま排出してよいと判別する。
【0038】
ステップSA9において、小切手4を現在排出しようとしているポケット19にそのまま排出してよいと判別した場合(ステップSA9:YES)、処理制御部70aは、排出検出器52の検出値を監視することにより小切手4が正常に排出されたか否かを監視しつつ、搬送モーター42を駆動することにより各種モーターを駆動して小切手4をポケット19に排出する(ステップSA10)。
一方、ステップSA9において、排出するポケット19をサブポケット19bに変更する必要があると判別した場合(ステップSA9:NO)、処理制御部70aは、搬送モーター42を駆動することにより各種モーターを駆動して、小切手4の先端が搬送路W上の分岐路の上流側の所定の位置に至るまで、小切手4をバックフィードする(ステップSA1)。
次いで、処理制御部70aは、切替板54を移動して、小切手4が排出されるポケット19をサブポケット19bに切り替える(ステップSA12)。
次いで、処理制御部70aは、排出検出器52の検出値を監視することにより小切手4が正常に排出されたか否かを監視しつつ、搬送モーター42を駆動することにより各種モーターを駆動して小切手4をサブポケット19bに排出する(ステップSA13)。
【0039】
ところで、上述したように、複合処理装置1は、ストッカー15に収納された複数の小切手4について連続して処理できる構成となっている。そして、複数枚(例えば、100枚)の小切手4を処理する場合、処理を開始してから終了するまでに要する時間が非常に長くなる場合があるため、できるだけスループットを向上し、処理に要する時間を短くしたいとする強いニーズがある。また、このニーズに応えることにより、複合処理装置1の商品としての価値、魅力の向上や、顧客満足度、利便性の向上を効果的に図ることができる。
ここで、従来の複合処理装置1では、搬送路W上に小切手4が位置している場合には、当該小切手4についてポケット19への排出が完了した後に、ストッカー15に収納された次の小切手4の搬送を開始していた。ここに着目し、搬送路W上に小切手4が位置している状態で、次の小切手4の搬送を開始することができれば、次の小切手4の搬送を開始するタイミングを早めることができ、ひいてはスループットを向上することが可能である。しかしながら、搬送路W上に小切手4が位置している状態で、次の小切手4の搬送を開始する場合、搬送路W上に複数の小切手4が存在することとなるため、これに起因して何らかのエラー、不具合が発生することを確実に防止する必要がある。
以上を踏まえ、本実施形態に係る複合処理装置1は、以下の動作を実行する。
【0040】
図5は、図4のステップSA1の搬送開始判別処理を詳細に示すフローチャートである。
上述したように、搬送開始判別処理は、当該処理の対象となる小切手4について、搬送を開始するタイミングが到来したか否かを判別する処理である。本実施形態に係る複合処理装置1は、以下のようにして、搬送を開始するタイミングが到来したか否かを判別することにより、搬送路W上に1又は複数の小切手4が位置している場合であっても、次の小切手4の搬送を開始することを可能としている。
また、以下の説明では、説明の便宜のため、図5のフローチャートの処理の開始時点で、搬送路W上に1又は複数の小切手4が位置している状態であるものとする。
【0041】
まず、複合処理装置1の制御部70の処理制御部70aは、搬送開始判別処理の対象となっている小切手4、すなわち、ストッカー15に収納された小切手4であって、搬送を開始するタイミングが到来したか否かの判別の対象となっている小切手4(以下、「処理対象小切手」という。)について、第1条件を満たすか否かを判別する(ステップSB1)。
第1条件とは、仮に現時点で小切手4の搬送を開始し、図4に示した各処理を順次実行し、ステップSA8において、その表面4a、及び、裏面4bを光学的に読み取ったとした場合に、それぞれの読み取り結果に係るデータを表面用バッファー77a及び裏面用バッファー77bに格納できる空き容量が各バッファーに確保されると予想されること、という条件である。
空き容量が確保されないと予想される場合に、小切手4の搬送を開始すると、図4のステップSA8において、表面4a及び裏面4bの光学的な読み取りを実行した際に、バッファーのオーバーフローが発生する。このため、空き容量が確保されないと予想される場合には、小切手4の搬送を開始することはできない。
これを踏まえ、処理制御部70aは、第1条件を満たさない場合は、表面用バッファー77a、裏面用バッファー77bのオーバーフローを防止すべく、第1条件を満たすか否かの監視を継続して実行する。
一方、処理制御部70aは、第1条件を満たす場合は、小切手4の搬送を介するための条件の1つが成立したとして、処理手順をステップSB2へ移行する。
なお、上記予想は、事前の実験やシミュレーションを踏まえて、既存のアルゴリズムを利用して適切に行われる。
【0042】
ステップSB2では、処理制御部70aは、第2条件を満たすか否かを判別する。
第2条件とは、搬送路W上に位置している全ての小切手4について、MICRヘッド35(磁気読取部)による読み取りが完了していること、という条件である。
ここで、ストッカー15に収納された小切手4を搬送路Wに送り出す場合、ホッパー駆動モーター26や、ASFモーター27、その他の小切手4の送り出しに係る機構の動作に伴って、MICRヘッド35による読み取りに悪影響を与えるノイズが発生する。そして、小切手4の送り出しは定期的に行われるものではなく、また、送り出しごとに発生するノイズの態様が異なるため、ノイズによる磁気的な読み取りへの悪影響の対策として、例えば、送り出しが行われる度に逆位相の信号によりノイズを除去する等の処置を行うことは適切でない。従って、第2条件を満たさない状態で、処理対象小切手の搬送を開始すると、当該処理対象小切手の送り出しに係る動作により、搬送路W上に位置する他の小切手4の磁気的な読み取りに悪影響を与える可能性がある。
以上を踏まえ、処理制御部70aは、第2条件を満たさない場合は、小切手4の搬送を開始できないとして、第2条件を満たすか否かの監視を継続して実行する。
一方、処理制御部70aは、第2条件を満たす場合は、小切手4の搬送を介するための条件の1つが成立したとして、処理手順をステップSB2へ移行する。
なお、処理制御部70aは、搬送路W上に位置している小切手4について、搬送路W上に設けられた各種センサーの検出値に基づいて、その位置を管理しており、MICRヘッド35による読み取りが終了したか否かを検出可能である。
また、搬送モーター42の駆動によるノイズは、搬送モーター42で一定の速度で回動するためそのノイズの態様が略一定であることを踏まえて、適切にそのノイズを低減する処理が行われる。
【0043】
ステップSB3では、処理制御部70aは、第3条件を満たすか否かを判別する。
第3条件とは、処理対象小切手の搬送を開始した場合に、搬送の開始後、搬送路W上に位置している全ての小切手4について、切替板54の移動が発生しないこと、という条件である。
ここで、切替板54の移動が行われる場合、当該移動に伴って、MICRヘッド35による読み取りに悪影響を与えるノイズが発生する。そして、切替板54の移動は定期的に行われるものではなく、また、切り替えに係る動作ごとに発生するノイズの態様が異なるため、ノイズによる磁気的な読み取りへの悪影響の対策として、例えば、切替板54の移動が行われる度に逆位相の信号によりノイズを除去する等の処置を行うことは適切でない。従って、第3条件を満たさない状態で、処理対象小切手の搬送を開始すると、当該処理対象小切手に対するMICRヘッド35による読み取り中に、他の小切手4についての切替板54の移動が発生し、当該読み取りに悪影響を与える可能性がある。
上述したように、本実施形態では、図4のステップSA4における小切手4が正しくセットされているか否かの判別の結果によって切替板54の移動が行われる場合があり(ステップSA6)、さらに、ステップSA7における画像の記録の結果によって切替板54の移動が行われる場合がある。これを踏まえ、処理制御部70aは、搬送路W上に位置する各小切手4について、ステップSA4の判別の結果、ステップSA7の画像の記録の結果(画像の全てが記録できたか否か)を取得すると共に、取得した結果に基づいて各小切手4について切替板54の移動が発生するか否かを判別する。各小切手4について切替板54の移動が発生しない場合は、第3条件を満たす。さらに、処理制御部70aは、いずれかの小切手4に切替板54の移動が発生する場合は、当該切替板54の移動が完了したか否かを判別する。実行すべき切替板54の移動が全て完了した場合は、第3条件を満たす。
処理制御部70aは、第3条件を満たさない場合は、小切手4の搬送を開始できないとして、第3条件を満たすか否かの監視を継続して実行する。
一方、処理制御部70aは、第3条件を満たす場合は、小切手4の搬送を介するための条件の1つが成立したとして、処理手順をステップSB4へ移行する。
なお、上記例では、ステップSA7の画像の記録が行われない限り、画像の記録の結果に基づく切替板54の移動が行われるか否かが判別できないため、搬送路W上に位置する各小切手4についてステップSA7の画像の記録が終了していることが第3条件を満たすための前提となる。ただし、本実施形態に係る複合処理装置1では、動作モードとして、小切手4に画像を記録する際に、画像の一部を記録しなかった場合であっても、排出するポケット19をサブポケット19bにしない動作モードがあり、当該動作モードの場合は、各小切手4に対して、ステップSA4の判別が行われていれば、第3条件を満たすための前提が揃うこととなる。
【0044】
ステップSB4では、処理制御部70aは、第4条件を満たすか否かを判別する。
第4条件とは、処理対象小切手の搬送を開始した場合に、搬送の開始後、搬送路W上に位置している全ての小切手4について、バックフィードが発生しないこと、という条件である。
ここで、搬送路W上に位置する小切手4についてバックフィードが発生した場合、搬送モーター42は、バックフィードのための動作を実行することとなるが、このバックフィードのための動作に起因して搬送路W上に位置する他の小切手4について何らかのエラーが発生する可能性がある。例えば、バックフィードが、他の小切手4がMICRヘッド35による読み取りを行っているときに行われた場合、当該他の小切手4へのMICRヘッド35による読み取りが正常に行われない事態を招く。
上述したように、本実施形態では、図4のステップSA7における画像の記録の結果によって小切手4のバックフィードが行われる場合がある。
これを踏まえ、処理制御部70aは、搬送路W上に位置する各小切手4について、ステップSA7の画像の記録の結果(画像の全てが記録できたか否か)を取得すると共に、取得した結果に基づいて各小切手4についてバックフィードが発生するか否かを判別する。各小切手4についてバックフィードが発生しない場合は、第4条件を満たす。さらに、処理制御部70aは、いずれかの小切手4にバックフィードが発生する場合は、当該バックフィードが完了したか否かを判別する。実行すべきバックフィードが全て完了した場合は、第4条件を満たす。
処理制御部70aは、第4条件を満たさない場合は、小切手4の搬送を開始できないとして、第4条件を満たすか否かの監視を継続して実行する。
一方、処理制御部70aは、第4条件を満たす場合は、小切手4の搬送を介するための条件の全てが成立したとして、処理手順をステップSB5へ移行する。
なお、上記例では、ステップSA7の画像の記録が行われない限り、画像の記録の結果に基づくバックフィードが行われるか否かが判別できないため、搬送路W上に位置する各小切手4についてステップSA7の画像の記録が終了していることが第4条件を満たすための前提となる。ただし、本実施形態に係る複合処理装置1では、動作モードとして、小切手4に画像を記録する際に、画像の一部を記録しなかった場合であっても、排出するポケット19をサブポケット19bにしない動作モードがあり、当該動作モードの場合は、バックフィードが行われることはないため、第4条件は常に満たされることとなる。
【0045】
ステップSA5では、処理制御部70aは、処理対象小切手について、搬送を開始するタイミングが到来したと判別し(ステップSB5)、サブルーチンとしての搬送開始判別処理を終了し、当該処理対象小切手について、図4のステップSA2以降の処理を順次実行する。
このように、本実施形態では、搬送路W上に位置している小切手4について、一連の処理が終了し、当該小切手4がポケット19に排出されたことをトリガーとして、ストッカー15に収納された次の小切手4の搬送を開始するのではなく、搬送路W上に小切手4が位置しているか否かにかかわらず、上述した第1〜4条件の全てを満たした時点で、次の小切手4を搬送するタイミングが到来したとして、当該次の小切手4の搬送を開始する。上述したように、これら第1〜4条件は、複数の小切手4が搬送路W上に位置した場合であっても、そのことに起因して何らかのエラーが発生しないようにするための必要最小限の条件である。このように、必要最小限の条件が満たされた場合に、次の小切手4について搬送を開始することにより、搬送路W上に他の小切手4が位置している状況であっても、可能な場合は、次の小切手4に対する搬送を開始することが可能となり、できるだけ早い段階で次の小切手4に対して搬送が開始されることとなり、ひいては、複数の小切手4の処理に係るスループットを効果的に向上することが可能となる。
【0046】
以上説明したように、本実施形態に係る複合処理装置1の処理制御部70aは、搬送路W上に位置している小切手4に対する処理の状況によって規定される条件が成立した場合に、搬送路W上に小切手4が位置しているか否かにかかわらず、ストッカー15に収納された次の小切手4について搬送を開始する。
これによれば、搬送路W上に位置している小切手4に対する一連の処理が完了したことを、次の小切手4の処理の開始のトリガーとするのではなく、小切手4に対する処理の状況によって規定される条件が成立したことを、次の小切手4の搬送の開始のトリガーとするため、搬送路W上に小切手4が位置している状況であっても、可能な場合は、次の小切手4に対する搬送を開始することが可能となり、できるだけ早い段階で次の小切手4に対して処理が開始されることとなり、複数の小切手4の処理に係るスループットを向上することが可能となる。
【0047】
また、本実施形態では、次の小切手4を搬送することの条件として、仮に現時点で小切手4の搬送を開始し、図4に示した各処理を順次実行し、ステップSA8において、その表面4a、及び、裏面4bを光学的に読み取ったとした場合に、それぞれの読み取り結果に係るデータを表面用バッファー77a及び裏面用バッファー77bに格納できる空き容量が各バッファーに確保されると予想されること、という第1条件が含まれている。
これにより、表面用バッファー77a、及び、裏面用バッファー77bのオーバーフローを的確に防止しつつ、次の小切手4の搬送が開始されるタイミングを早めることができ、複数の小切手4の処理に係るスループットを向上することが可能となる。
【0048】
また、本実施形態では、次の小切手4を搬送することの条件として、搬送路W上に位置している全ての小切手4について、MICRヘッド35(磁気読取部)による読み取りが完了していること、という第2条件が含まれている。
これによれば、次の小切手4の搬送を開始することに起因した他の小切手4についてのMICRヘッド35による読み取りへの悪影響を的確に防止しつつ、次の小切手4の搬送が開始されるタイミングを早めることができ、複数の小切手4の処理に係るスループットを向上することが可能となる。
【0049】
また、本実施形態では、次の小切手4を搬送することの条件として、当該次の小切手4の搬送を開始した場合に、搬送の開始後、搬送路W上に位置している全ての小切手4について、切替板54の移動が発生しないこと、という第3条件が含まれている。
これによれば、次の小切手4の搬送を開始した場合に、他の小切手4についての切替板54の移動に起因した、当該次の小切手4へのMICRヘッド35による読み取りへの悪影響を的確に防止しつつ、次の小切手4の搬送が開始されるタイミングを早めることができ、複数の小切手4の処理に係るスループットを向上することが可能となる。
【0050】
また、本実施形態では、次の小切手4を搬送することの条件として、当該次の小切手4の搬送を開始した場合に、搬送の開始後、搬送路W上に位置している全ての小切手4について、バックフィードが発生しないこと、という第4条件が含まれている。
これによれば、次の小切手4の搬送を開始した場合に、他の小切手4にバックフィードが発生し、それに起因して何らかのエラーが発生することを的確に防止しつつ、次の小切手4の搬送が開始されるタイミングを早めることができ、複数の小切手4の処理に係るスループットを向上することが可能となる。
【0051】
なお、上述した実施の形態は、あくまでも本発明の一態様を示すものであり、本発明の範囲内で任意に変形および応用が可能である。
例えば、上述した実施形態では、切替板54の移動が発生する場合や、バックフィードが発生する場合について、具体的に、例を挙げて説明したが、当該例に限らず、例えば、動作モードによってこれらが発生する条件やタイミングを変更できるようにしてもよい。すなわち、本願発明を適用すれば、どのような条件、タイミングで、切替板54の移動、バックフィードが発生する場合であっても、的確にこれらによる悪影響を排除した上で、スループットを向上可能である。
また例えば、上述した実施形態では、複合処理装置1は、搬送路W上に、MICRヘッド35、インクジェットヘッド10、及び、CISユニットが順次配置された構造であったが、装置の配置順番や、装置の具体的構造は、これに限らない。すなわち、本発明は、切替部、搬送部、磁気読取部、光学読取部を備える装置に広く適用可能である。
また例えば、図3に示す各機能ブロックはハードウェアとソフトウェアの協働により任意に実現可能であり、特定のハードウェア構成を示唆するものではない。
また例えば、制御部70の機能を、複合処理装置1に外部接続される別の装置に持たせるようにしてもよい。
また、外部接続される記憶媒体に記憶させたプログラムを実行することにより、図4、図5で示した各フローチャートの各ステップを実行するようにしてもよい。
【符号の説明】
【0052】
1…複合処理装置(媒体処理装置)、4…小切手(媒体)、5…ホストコンピューター(制御装置)、15…ストッカー(収納部)、19…ポケット(排出部)、19a…メインポケット(排出部)、19b…サブポケット(排出部)、27…ASFモーター(搬送部)、35…MICRヘッド(磁気読取部)、42…搬送モーター(搬送部)、47…表面CISユニット(光学読取部)、48…裏面CISユニット(光学読取部)、54…切替板(切替部)、55…切替板駆動モーター(切替部)、70…制御部(切替部、搬送部、磁気読取部、光学読取部)、70a…処理制御部、73…モータードライバー(搬送部)、74…読取制御回路(磁気読取部、光学読取部)、77a…表面用バッファー(バッファー)、77b…裏面用バッファー(バッファー)。
【特許請求の範囲】
【請求項1】
複数の媒体を収納可能な収納部と、
前記収納部に連通し、前記媒体を搬送する搬送路と、
前記搬送路に連通可能であり、前記媒体が排出される複数の排出部と、
前記媒体を排出する前記排出部を切り替える切替部と、
前記収納部から前記搬送路を経由して前記排出部へ、前記媒体を搬送する搬送部と、
前記搬送路に配置され、前記搬送部により搬送される前記媒体の情報を読み取る読取部と、
前記切替部、前記搬送部、及び、前記読取部を制御して、前記収納部に収納された複数の前記媒体に対して、前記収納部から前記排出部への搬送、及び、搬送中の前記媒体に対する前記読取部による読み取りを含む一連の処理を、連続して実行する処理制御部と、を備え、
前記処理制御部は、
前記搬送路上に位置している前記媒体に対する、前記切替部、前記搬送部、及び、前記読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立した場合に、前記搬送路上に前記媒体が位置しているか否かにかかわらず、前記収納部に収納された次の前記媒体について前記搬送部による搬送を開始することを特徴とする媒体処理装置。
【請求項2】
前記読取部は、前記搬送部により搬送される前記媒体を磁気的に読み取る磁気読取部と、光学的に読み取る光学読取部と、を含み、
前記処理制御部は、
前記搬送路上に位置している前記媒体に対する、前記切替部、前記搬送部、前記磁気読取部、及び、前記光学読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立した場合に、前記搬送路上に前記媒体が位置しているか否かにかかわらず、前記収納部に収納された次の前記媒体について前記搬送部による搬送を開始することを特徴とする請求項1に記載の媒体処理装置。
【請求項3】
前記光学読取部による読み取り結果に係るデータを収容するバッファーを、備え、
前記光学読取部は、
読み取り結果に係るデータをバッファーに格納し、格納した前記データを、接続された制御装置に転送し、
前記所定の条件には、
前記収納部に収納された次の前記媒体を前記光学読取部で読み取った場合に、読み取り結果に係る前記データを前記バッファーに格納できること、という条件が含まれていることを特徴とする請求項2に記載の媒体処理装置。
【請求項4】
前記所定の条件には、
前記搬送路上に位置している前記媒体について、前記磁気読取部による読み取りが終了していること、という条件が含まれていることを特徴とする請求項2又は3に記載の媒体処理装置。
【請求項5】
前記処理制御部は、
前記搬送路上に位置している前記媒体に対する所定の処理の結果に応じて、前記切替部によって前記搬送路上に設けられた切替板を移動し、又は、移動しないことにより前記媒体が排出される前記排出部を前記所定の処理の結果に応じた前記排出部に切り替え、
前記所定の条件には、
前記収納部に収納された次の前記媒体の搬送を開始した後に、前記搬送路上に位置している前記媒体について、前記切替板の移動が発生しないこと、という条件が含まれていることを特徴とする請求項1ないし4のいずれかに記載の媒体処理装置。
【請求項6】
前記処理制御部は、
前記切替部による切り替え後の前記排出部に前記媒体を排出すべく、前記媒体をバックフィード可能に構成され、
前記所定の条件には、
前記収納部に収納された次の前記媒体の搬送を開始した後に、前記搬送路上に位置している前記媒体について、前記バックフィードが発生しないこと、という条件が含まれていることを特徴とする請求項1ないし5のいずれかに記載の媒体処理装置。
【請求項7】
複数の媒体を収納可能な収納部と、
前記収納部に連通し、前記媒体を搬送する搬送路と、
前記搬送路に連通可能であり、前記媒体が排出される複数の排出部と、
前記媒体を排出する前記排出部を切り替える切替部と、
前記収納部から前記搬送路を経由して前記排出部へ、前記媒体を搬送する搬送部と、
前記搬送路に配置され、前記搬送部により搬送される前記媒体の情報を読み取る読取部と、を備える媒体処理装置の制御方法であって、
前記搬送路上に位置している前記媒体に対する、前記切替部、前記搬送部、及び、前記読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立したか否かを判別し、成立した場合に前記搬送路上に前記媒体が位置しているか否かにかかわらず、前記収納部に収納された次の前記媒体について前記搬送部による搬送を開始することを特徴とする媒体処理装置の制御方法。
【請求項8】
請求項7に記載の媒体処理装置の制御方法であって、
前記読取部は、前記搬送部により搬送される前記媒体を磁気的に読み取る磁気読取部と光学的に読み取る光学読取部と、含み、
前記搬送路上に位置している前記媒体に対する、前記切替部、前記搬送部、前記磁気読取部、及び、前記光学読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立したか否かを判別し、成立した場合に前記搬送路上に前記媒体が位置しているか否かにかかわらず、前記収納部に収納された次の前記媒体について前記搬送部による搬送を開始することを特徴とする媒体処理装置の制御方法。
【請求項9】
複数の媒体を収納可能な収納部と、
前記収納部に連通し、前記媒体を搬送する搬送路と、
前記搬送路に連通可能であり、前記媒体が排出される複数の排出部と、
前記媒体を排出する前記排出部を切り替える切替部と、
前記収納部から前記搬送路を経由して前記排出部へ、前記媒体を搬送する搬送部と、
前記搬送路に配置され、前記搬送部により搬送される前記媒体の情報を読み取る読取部と、を備える媒体処理装置の各部を制御する制御部により実行されるプログラムであって、
前記制御部を、
前記搬送路上に位置している前記媒体に対する、前記切替部、前記搬送部、前記読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立した場合に、前記搬送路上に前記媒体が位置しているか否かにかかわらず、前記収納部に収納された次の前記媒体について前記搬送部による搬送を開始する処理制御部として機能させることを特徴とするプログラム。
【請求項1】
複数の媒体を収納可能な収納部と、
前記収納部に連通し、前記媒体を搬送する搬送路と、
前記搬送路に連通可能であり、前記媒体が排出される複数の排出部と、
前記媒体を排出する前記排出部を切り替える切替部と、
前記収納部から前記搬送路を経由して前記排出部へ、前記媒体を搬送する搬送部と、
前記搬送路に配置され、前記搬送部により搬送される前記媒体の情報を読み取る読取部と、
前記切替部、前記搬送部、及び、前記読取部を制御して、前記収納部に収納された複数の前記媒体に対して、前記収納部から前記排出部への搬送、及び、搬送中の前記媒体に対する前記読取部による読み取りを含む一連の処理を、連続して実行する処理制御部と、を備え、
前記処理制御部は、
前記搬送路上に位置している前記媒体に対する、前記切替部、前記搬送部、及び、前記読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立した場合に、前記搬送路上に前記媒体が位置しているか否かにかかわらず、前記収納部に収納された次の前記媒体について前記搬送部による搬送を開始することを特徴とする媒体処理装置。
【請求項2】
前記読取部は、前記搬送部により搬送される前記媒体を磁気的に読み取る磁気読取部と、光学的に読み取る光学読取部と、を含み、
前記処理制御部は、
前記搬送路上に位置している前記媒体に対する、前記切替部、前記搬送部、前記磁気読取部、及び、前記光学読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立した場合に、前記搬送路上に前記媒体が位置しているか否かにかかわらず、前記収納部に収納された次の前記媒体について前記搬送部による搬送を開始することを特徴とする請求項1に記載の媒体処理装置。
【請求項3】
前記光学読取部による読み取り結果に係るデータを収容するバッファーを、備え、
前記光学読取部は、
読み取り結果に係るデータをバッファーに格納し、格納した前記データを、接続された制御装置に転送し、
前記所定の条件には、
前記収納部に収納された次の前記媒体を前記光学読取部で読み取った場合に、読み取り結果に係る前記データを前記バッファーに格納できること、という条件が含まれていることを特徴とする請求項2に記載の媒体処理装置。
【請求項4】
前記所定の条件には、
前記搬送路上に位置している前記媒体について、前記磁気読取部による読み取りが終了していること、という条件が含まれていることを特徴とする請求項2又は3に記載の媒体処理装置。
【請求項5】
前記処理制御部は、
前記搬送路上に位置している前記媒体に対する所定の処理の結果に応じて、前記切替部によって前記搬送路上に設けられた切替板を移動し、又は、移動しないことにより前記媒体が排出される前記排出部を前記所定の処理の結果に応じた前記排出部に切り替え、
前記所定の条件には、
前記収納部に収納された次の前記媒体の搬送を開始した後に、前記搬送路上に位置している前記媒体について、前記切替板の移動が発生しないこと、という条件が含まれていることを特徴とする請求項1ないし4のいずれかに記載の媒体処理装置。
【請求項6】
前記処理制御部は、
前記切替部による切り替え後の前記排出部に前記媒体を排出すべく、前記媒体をバックフィード可能に構成され、
前記所定の条件には、
前記収納部に収納された次の前記媒体の搬送を開始した後に、前記搬送路上に位置している前記媒体について、前記バックフィードが発生しないこと、という条件が含まれていることを特徴とする請求項1ないし5のいずれかに記載の媒体処理装置。
【請求項7】
複数の媒体を収納可能な収納部と、
前記収納部に連通し、前記媒体を搬送する搬送路と、
前記搬送路に連通可能であり、前記媒体が排出される複数の排出部と、
前記媒体を排出する前記排出部を切り替える切替部と、
前記収納部から前記搬送路を経由して前記排出部へ、前記媒体を搬送する搬送部と、
前記搬送路に配置され、前記搬送部により搬送される前記媒体の情報を読み取る読取部と、を備える媒体処理装置の制御方法であって、
前記搬送路上に位置している前記媒体に対する、前記切替部、前記搬送部、及び、前記読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立したか否かを判別し、成立した場合に前記搬送路上に前記媒体が位置しているか否かにかかわらず、前記収納部に収納された次の前記媒体について前記搬送部による搬送を開始することを特徴とする媒体処理装置の制御方法。
【請求項8】
請求項7に記載の媒体処理装置の制御方法であって、
前記読取部は、前記搬送部により搬送される前記媒体を磁気的に読み取る磁気読取部と光学的に読み取る光学読取部と、含み、
前記搬送路上に位置している前記媒体に対する、前記切替部、前記搬送部、前記磁気読取部、及び、前記光学読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立したか否かを判別し、成立した場合に前記搬送路上に前記媒体が位置しているか否かにかかわらず、前記収納部に収納された次の前記媒体について前記搬送部による搬送を開始することを特徴とする媒体処理装置の制御方法。
【請求項9】
複数の媒体を収納可能な収納部と、
前記収納部に連通し、前記媒体を搬送する搬送路と、
前記搬送路に連通可能であり、前記媒体が排出される複数の排出部と、
前記媒体を排出する前記排出部を切り替える切替部と、
前記収納部から前記搬送路を経由して前記排出部へ、前記媒体を搬送する搬送部と、
前記搬送路に配置され、前記搬送部により搬送される前記媒体の情報を読み取る読取部と、を備える媒体処理装置の各部を制御する制御部により実行されるプログラムであって、
前記制御部を、
前記搬送路上に位置している前記媒体に対する、前記切替部、前記搬送部、前記読取部のうち少なくとも1つによる処理の状況によって規定される所定の条件が成立した場合に、前記搬送路上に前記媒体が位置しているか否かにかかわらず、前記収納部に収納された次の前記媒体について前記搬送部による搬送を開始する処理制御部として機能させることを特徴とするプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−73431(P2013−73431A)
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願番号】特願2011−212077(P2011−212077)
【出願日】平成23年9月28日(2011.9.28)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成25年4月22日(2013.4.22)
【国際特許分類】
【出願日】平成23年9月28日(2011.9.28)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]