
孔路位置計測方法及び装置
【課題】本発明は、センサプローブを掘削孔又は管路内に挿入した後、センサプローブと掘削孔又は管路が平行となるまでは、方位演算を中止して計測誤差の発生を防止することを目的とする。
【解決手段】本発明による孔路位置計測方法及び装置は、センサプローブ(1)を前記掘削孔(2)又は管路内に挿入した後、前記センサプローブ(1)のプローブ軸方向(P1)と前記掘削孔(2)又は管路の軸方向(P2)又は長手方向と平行となるまでの一定距離を設定し、前記一定距離の間、前記演算部(7)における方位演算は行わないようにした方法と装置である。
【解決手段】本発明による孔路位置計測方法及び装置は、センサプローブ(1)を前記掘削孔(2)又は管路内に挿入した後、前記センサプローブ(1)のプローブ軸方向(P1)と前記掘削孔(2)又は管路の軸方向(P2)又は長手方向と平行となるまでの一定距離を設定し、前記一定距離の間、前記演算部(7)における方位演算は行わないようにした方法と装置である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、孔路位置計測方法及び装置に関し、特に、センサプローブを掘削孔又は管路内に挿入した後、センサプローブと掘削孔又は管路が平行となるまでは、方位演算を中止して計測誤差の発生を防止するための新規な改良に関する。
【背景技術】
【0002】
従来、用いられていたこの種の孔路計測方法としては、例えば、特許文献1に開示されている孔路計測方法を図2から図4において示すことができる。
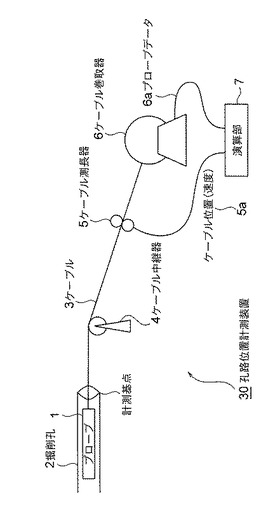
すなわち、図2において符号1で示されるものは掘削孔(又は管路)2内に移動自在に設けられたセンサプローブであり、このセンサプローブ1に接続されたケーブル3は、ケーブル中継器4、ケーブル測長器5を介してケーブル巻取器6で巻取るように構成されている。
【0003】
前記ケーブル測長器5からのケーブル速度5a及びケーブル巻取器6からのプローブデータ6aは演算部7に取込まれている。
前記センサプローブ1は、図3のように構成され、3軸の角速度計10と加速度計11がA/D変換器12を介して制御回路13に接続され、この制御回路13からのデータ13aは第1通信回路14からケーブル3を介して演算部7の第2通信回路15に入力されている。
【0004】
前記演算部7では、前記第2通信回路15が,表示器16と記憶回路17を有する演算/表示回路18に接続され、前記ケーブル測長器5からのケーブル速度5aは、入力回路19を経て前記演算/表示回路18に入力されている。
【0005】
前述の構成において、前記プローブ1にて得られた角速度及び加速度のプローブデータ6aに基づいて姿勢・方位角演算を行い、ケーブル測長器5にてケーブル速度5aを計測し、これらを組合わせて演算部7で演算することにより掘削孔2の経路を計測する。
前述の経路演算は、下記の数1にて実施するが、姿勢・方位角計測で誤差要因として、角速度計のバイアス(δΨ’)がある。
前記バイアスが小さいほど計測誤差は小さくなるが、バイアスが小さい角速度計は高価である。
【0006】
【数1】

【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2007−155583号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
従来の孔路計測方法及び装置は、以上のように構成されていたため、次のような課題が存在していた。
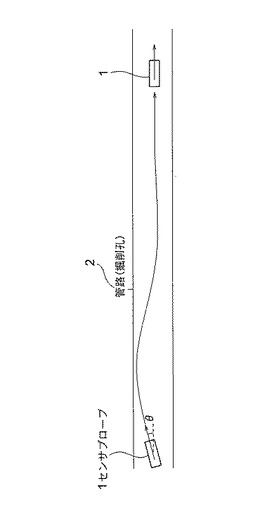
すなわち、孔路計測開始時には、図4で示されるように、センサプローブのプローブ軸方向と掘削孔又は管路の軸方向とが、一致していないことが多いが、この各軸方向が一致していない恐れが強い孔路計測開始時から実際の計測を開始していたため、各軸方向のずれ角度θ(図4で示す)がセンサプローブの前進につれて徐々に0となるが、その間、センサプローブは管路又は掘削孔に沿って直進していないため、取得したデータと実際の管路の形状に誤差が生じ、結果としては、孔路計測誤差をなくすことが困難であった。
【課題を解決するための手段】
【0009】
本発明による孔路計測方法は、掘削孔又は管路内を移動し角速度計及び加速度計を有するセンサプローブからのデータにより姿勢・方位角演算を演算部で行い、前記センサプローブに接続されたケーブルのケーブル速度をケーブル測長器にて計測し、前記姿勢・方位角及びケーブル速度の演算により前記掘削孔の計測を行うようにした孔路位置計測方法において、前記センサプローブを前記掘削孔又は管路内に挿入した後、前記センサプローブのプローブ軸方向と前記掘削孔又は管路の軸方向又は長手方向と平行となるまでの一定距離を設定し、前記一定距離の間、前記演算部における方位演算は行わず、前記センサプローブは直進しているものとする方法であり、また、前記一定距離は、前記プローブ軸方向と前記掘削孔又は管路の軸方向又は長手方向とのずれ角度が0となるまでの距離とする方法であり、また、本発明による孔路位置計測装置は、掘削孔又は管路内を移動し角速度計及び加速度計を有するセンサプローブからのデータにより姿勢・方位角演算を演算部で行い、前記センサプローブに接続されたケーブルのケーブル速度をケーブル測長器にて計測し、前記姿勢・方位角及びケーブル速度の演算により前記掘削孔の計測を行うようにした孔路位置計測装置において、前記センサプローブを前記掘削孔又は管路内に挿入した後、前記センサプローブのプローブ軸方向と前記掘削孔又は管路の軸方向又は長手方向と平行となるまでの一定距離を設定し、前記一定距離の間、前記演算部における方位演算は行わず、前記センサプローブは直進しているものとする構成であり、また、前記一定距離は、前記プローブ軸方向と前記掘削孔又は管路の軸方向又は長手方向とのずれ角度が0となるまでの距離とする構成である。
【発明の効果】
【0010】
本発明による孔路位置計測方法及び装置は、以上のように構成されているため、次のような効果を得ることができる。
すなわち、掘削孔又は管路内を移動し角速度計及び加速度計を有するセンサプローブからのデータにより姿勢・方位角演算を演算部で行い、前記センサプローブに接続されたケーブルのケーブル速度をケーブル測長器にて計測し、前記姿勢・方位角及びケーブル速度の演算により前記掘削孔の計測を行うようにした孔路位置計測方法及び装置において、前記センサプローブを前記掘削孔又は管路内に挿入した後、前記センサプローブのプローブ軸方向と前記掘削孔又は管路の軸方向又は長手方向と平行となるまでの一定距離を設定し、前記一定距離の間、前記演算部における方位演算は行わず、前記センサプローブは直進しているものとすることにより、計測開始時におけるセンサプローブのプローブ軸方向と管路又は掘削孔の軸方向とが互いに平行でない区間は方位演算を行うことがなく、従来生じていた誤差の発生を防止することができる。
前記一定距離は、前記プローブ軸方向と前記掘削孔又は管路の軸方向又は長手方向とのずれ角度が0となるまでの距離とすることにより、前述の誤差発生を完全に防止し、管路等の孔位置計測精度を大幅に向上させることができる。
【図面の簡単な説明】
【0011】
【図1】本発明による孔路位置計測方法及び装置による計測状態を示す構成図である。
【図2】従来及び本発明による孔路位置計測装置を示す構成図である。
【図3】従来及び本発明による孔路位置計測装置を示すブロック図である。
【図4】従来の孔路位置計測方法及び装置による計測状態を示す構成図である。
【発明を実施するための形態】
【0012】
本発明は、センサプローブを掘削孔又は管路内に挿入した後、センサプローブと掘削孔又は管路が平行となるまでは、方位演算を中止して計測誤差の発生を防止するようにした孔路位置計測方法及び装置を提供することを目的とする。
【実施例】
【0013】
以下、図面と共に本発明による孔路位置計測方法及び装置の好適な実施の形態について説明する。
尚、従来例と同一又は同等部分については、同一符号を用いて説明すると共に、従来例の図2の構成及び図3のセンサプローブ1と演算部7の構成は本発明の構成にそのまま援用し、説明の重複を避けるためにその説明は省略する。
【0014】
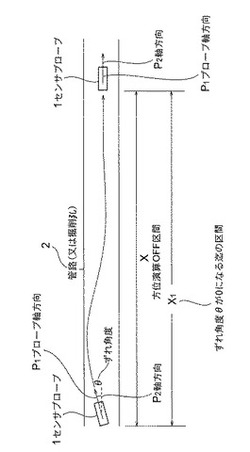
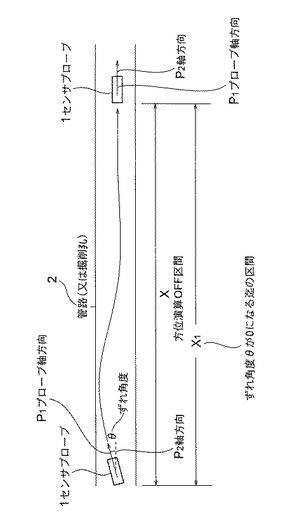
前述の図2の孔路位置計測装置30はセンサプローブ1及び演算部7を用い、前記センサプローブ1を管路2又は掘削孔内の所定の位置に挿入すると、図1で示されるように、センサプローブ1のプローブ軸方向P1と管路2又は掘削孔の軸方向P2との間にずれ角度θが発生している。
【0015】
前述のように、前記プローブ軸方向P1と軸方向P2との間にずれ角度θが発生して各軸方向P1,P2が互いに平行でない場合、このままセンサプローブ1を図1の管路2又は掘削孔内でケーブル3を引くことにより前記ずれ角θはやがて0になるが、そのずれ角θが0になる迄の距離X1の間を方位演算OFF区間X(任意に設定・記録が可能)とする。
【0016】
前記方位演算OFF区間Xは、前記管路2又は掘削孔内に挿入されたセンサプローブ1のプローブ軸方向P1と前記軸方向P2とが互いに平行な関係となる(すなわち、前述のずれ角θが0となる)区間のことであり、この方位演算OFF区間Xでは、センサプローブ1から送られてくるプローブデータ6aが前記演算部7では方位演算が行われないようにプログラムされている。
【0017】
従って、前述の管路2又は掘削孔内に挿入されたセンサプローブ1が前記方位演算OFF区間X内を移動、すなわち、通過している間は、前記センサプローブ1が直進している(すなわち、前記各軸方向P1,P2が互いに平行である状態)とみなして、方位演算を行うことができ、従来のようなずれ角度θによる方位演算誤差の発生を防止することができる。
すなわち、前記センサプローブ1からの取得データと管路2の管路形状間の誤差の発生を防止することができる。
【産業上の利用可能性】
【0018】
本発明による孔路位置計測方法及び装置は、センサプローブを掘削孔又は管路内に挿入した後、センサプローブと掘削孔又は管路が平行となるまでは、方位演算を中止して計測誤差の発生を防止することができる。
【符号の説明】
【0019】
1 センサプローブ
2 管路(又は掘削孔)
3 ケーブル
4 ケーブル中継器
5 ケーブル測長器
5a ケーブル位置(速度)
6 ケーブル巻取器
6a プローブデータ
7 演算部
10 角速度計
11 加速度計
30 孔路位置計測装置
P1 プローブ軸方向
P2 軸方向
θ ずれ角度
X 方位演算OFF区間
X1 ずれ角度θが0になる迄の区間
【技術分野】
【0001】
本発明は、孔路位置計測方法及び装置に関し、特に、センサプローブを掘削孔又は管路内に挿入した後、センサプローブと掘削孔又は管路が平行となるまでは、方位演算を中止して計測誤差の発生を防止するための新規な改良に関する。
【背景技術】
【0002】
従来、用いられていたこの種の孔路計測方法としては、例えば、特許文献1に開示されている孔路計測方法を図2から図4において示すことができる。
すなわち、図2において符号1で示されるものは掘削孔(又は管路)2内に移動自在に設けられたセンサプローブであり、このセンサプローブ1に接続されたケーブル3は、ケーブル中継器4、ケーブル測長器5を介してケーブル巻取器6で巻取るように構成されている。
【0003】
前記ケーブル測長器5からのケーブル速度5a及びケーブル巻取器6からのプローブデータ6aは演算部7に取込まれている。
前記センサプローブ1は、図3のように構成され、3軸の角速度計10と加速度計11がA/D変換器12を介して制御回路13に接続され、この制御回路13からのデータ13aは第1通信回路14からケーブル3を介して演算部7の第2通信回路15に入力されている。
【0004】
前記演算部7では、前記第2通信回路15が,表示器16と記憶回路17を有する演算/表示回路18に接続され、前記ケーブル測長器5からのケーブル速度5aは、入力回路19を経て前記演算/表示回路18に入力されている。
【0005】
前述の構成において、前記プローブ1にて得られた角速度及び加速度のプローブデータ6aに基づいて姿勢・方位角演算を行い、ケーブル測長器5にてケーブル速度5aを計測し、これらを組合わせて演算部7で演算することにより掘削孔2の経路を計測する。
前述の経路演算は、下記の数1にて実施するが、姿勢・方位角計測で誤差要因として、角速度計のバイアス(δΨ’)がある。
前記バイアスが小さいほど計測誤差は小さくなるが、バイアスが小さい角速度計は高価である。
【0006】
【数1】
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2007−155583号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
従来の孔路計測方法及び装置は、以上のように構成されていたため、次のような課題が存在していた。
すなわち、孔路計測開始時には、図4で示されるように、センサプローブのプローブ軸方向と掘削孔又は管路の軸方向とが、一致していないことが多いが、この各軸方向が一致していない恐れが強い孔路計測開始時から実際の計測を開始していたため、各軸方向のずれ角度θ(図4で示す)がセンサプローブの前進につれて徐々に0となるが、その間、センサプローブは管路又は掘削孔に沿って直進していないため、取得したデータと実際の管路の形状に誤差が生じ、結果としては、孔路計測誤差をなくすことが困難であった。
【課題を解決するための手段】
【0009】
本発明による孔路計測方法は、掘削孔又は管路内を移動し角速度計及び加速度計を有するセンサプローブからのデータにより姿勢・方位角演算を演算部で行い、前記センサプローブに接続されたケーブルのケーブル速度をケーブル測長器にて計測し、前記姿勢・方位角及びケーブル速度の演算により前記掘削孔の計測を行うようにした孔路位置計測方法において、前記センサプローブを前記掘削孔又は管路内に挿入した後、前記センサプローブのプローブ軸方向と前記掘削孔又は管路の軸方向又は長手方向と平行となるまでの一定距離を設定し、前記一定距離の間、前記演算部における方位演算は行わず、前記センサプローブは直進しているものとする方法であり、また、前記一定距離は、前記プローブ軸方向と前記掘削孔又は管路の軸方向又は長手方向とのずれ角度が0となるまでの距離とする方法であり、また、本発明による孔路位置計測装置は、掘削孔又は管路内を移動し角速度計及び加速度計を有するセンサプローブからのデータにより姿勢・方位角演算を演算部で行い、前記センサプローブに接続されたケーブルのケーブル速度をケーブル測長器にて計測し、前記姿勢・方位角及びケーブル速度の演算により前記掘削孔の計測を行うようにした孔路位置計測装置において、前記センサプローブを前記掘削孔又は管路内に挿入した後、前記センサプローブのプローブ軸方向と前記掘削孔又は管路の軸方向又は長手方向と平行となるまでの一定距離を設定し、前記一定距離の間、前記演算部における方位演算は行わず、前記センサプローブは直進しているものとする構成であり、また、前記一定距離は、前記プローブ軸方向と前記掘削孔又は管路の軸方向又は長手方向とのずれ角度が0となるまでの距離とする構成である。
【発明の効果】
【0010】
本発明による孔路位置計測方法及び装置は、以上のように構成されているため、次のような効果を得ることができる。
すなわち、掘削孔又は管路内を移動し角速度計及び加速度計を有するセンサプローブからのデータにより姿勢・方位角演算を演算部で行い、前記センサプローブに接続されたケーブルのケーブル速度をケーブル測長器にて計測し、前記姿勢・方位角及びケーブル速度の演算により前記掘削孔の計測を行うようにした孔路位置計測方法及び装置において、前記センサプローブを前記掘削孔又は管路内に挿入した後、前記センサプローブのプローブ軸方向と前記掘削孔又は管路の軸方向又は長手方向と平行となるまでの一定距離を設定し、前記一定距離の間、前記演算部における方位演算は行わず、前記センサプローブは直進しているものとすることにより、計測開始時におけるセンサプローブのプローブ軸方向と管路又は掘削孔の軸方向とが互いに平行でない区間は方位演算を行うことがなく、従来生じていた誤差の発生を防止することができる。
前記一定距離は、前記プローブ軸方向と前記掘削孔又は管路の軸方向又は長手方向とのずれ角度が0となるまでの距離とすることにより、前述の誤差発生を完全に防止し、管路等の孔位置計測精度を大幅に向上させることができる。
【図面の簡単な説明】
【0011】
【図1】本発明による孔路位置計測方法及び装置による計測状態を示す構成図である。
【図2】従来及び本発明による孔路位置計測装置を示す構成図である。
【図3】従来及び本発明による孔路位置計測装置を示すブロック図である。
【図4】従来の孔路位置計測方法及び装置による計測状態を示す構成図である。
【発明を実施するための形態】
【0012】
本発明は、センサプローブを掘削孔又は管路内に挿入した後、センサプローブと掘削孔又は管路が平行となるまでは、方位演算を中止して計測誤差の発生を防止するようにした孔路位置計測方法及び装置を提供することを目的とする。
【実施例】
【0013】
以下、図面と共に本発明による孔路位置計測方法及び装置の好適な実施の形態について説明する。
尚、従来例と同一又は同等部分については、同一符号を用いて説明すると共に、従来例の図2の構成及び図3のセンサプローブ1と演算部7の構成は本発明の構成にそのまま援用し、説明の重複を避けるためにその説明は省略する。
【0014】
前述の図2の孔路位置計測装置30はセンサプローブ1及び演算部7を用い、前記センサプローブ1を管路2又は掘削孔内の所定の位置に挿入すると、図1で示されるように、センサプローブ1のプローブ軸方向P1と管路2又は掘削孔の軸方向P2との間にずれ角度θが発生している。
【0015】
前述のように、前記プローブ軸方向P1と軸方向P2との間にずれ角度θが発生して各軸方向P1,P2が互いに平行でない場合、このままセンサプローブ1を図1の管路2又は掘削孔内でケーブル3を引くことにより前記ずれ角θはやがて0になるが、そのずれ角θが0になる迄の距離X1の間を方位演算OFF区間X(任意に設定・記録が可能)とする。
【0016】
前記方位演算OFF区間Xは、前記管路2又は掘削孔内に挿入されたセンサプローブ1のプローブ軸方向P1と前記軸方向P2とが互いに平行な関係となる(すなわち、前述のずれ角θが0となる)区間のことであり、この方位演算OFF区間Xでは、センサプローブ1から送られてくるプローブデータ6aが前記演算部7では方位演算が行われないようにプログラムされている。
【0017】
従って、前述の管路2又は掘削孔内に挿入されたセンサプローブ1が前記方位演算OFF区間X内を移動、すなわち、通過している間は、前記センサプローブ1が直進している(すなわち、前記各軸方向P1,P2が互いに平行である状態)とみなして、方位演算を行うことができ、従来のようなずれ角度θによる方位演算誤差の発生を防止することができる。
すなわち、前記センサプローブ1からの取得データと管路2の管路形状間の誤差の発生を防止することができる。
【産業上の利用可能性】
【0018】
本発明による孔路位置計測方法及び装置は、センサプローブを掘削孔又は管路内に挿入した後、センサプローブと掘削孔又は管路が平行となるまでは、方位演算を中止して計測誤差の発生を防止することができる。
【符号の説明】
【0019】
1 センサプローブ
2 管路(又は掘削孔)
3 ケーブル
4 ケーブル中継器
5 ケーブル測長器
5a ケーブル位置(速度)
6 ケーブル巻取器
6a プローブデータ
7 演算部
10 角速度計
11 加速度計
30 孔路位置計測装置
P1 プローブ軸方向
P2 軸方向
θ ずれ角度
X 方位演算OFF区間
X1 ずれ角度θが0になる迄の区間
【特許請求の範囲】
【請求項1】
掘削孔(2)又は管路内を移動し角速度計(10)及び加速度計(11)を有するセンサプローブ(1)からのデータにより姿勢・方位角演算を演算部(7)で行い、前記センサプローブ(1)に接続されたケーブル(3)のケーブル速度(5a)をケーブル測長器(5)にて計測し、前記姿勢・方位角及びケーブル速度の演算により前記掘削孔(2)の計測を行うようにした孔路位置計測方法において、
前記センサプローブ(1)を前記掘削孔(2)又は管路内に挿入した後、前記センサプローブ(1)のプローブ軸方向(P1)と前記掘削孔(2)又は管路の軸方向(P2)又は長手方向と平行となるまでの一定距離を設定し、前記一定距離の間、前記演算部(7)における方位演算は行わず、前記センサプローブ(1)は直進しているものとすることを特徴とする孔路位置計測方法。
【請求項2】
前記一定距離は、前記プローブ軸方向(P1)と前記掘削孔(2)又は管路の軸方向(P2)又は長手方向とのずれ角度(θ)が0となるまでの距離とすることを特徴とする請求項1記載の孔路位置計測方法。
【請求項3】
掘削孔(2)又は管路内を移動し角速度計(10)及び加速度計(11)を有するセンサプローブ(1)からデータにより姿勢・方位角演算を演算部(7)で行い、前記センサプローブ(1)に接続されたケーブル(3)のケーブル速度(5a)をケーブル測長器(5)にて計測し、前記姿勢・方位角及びケーブル速度の演算により前記掘削孔(2)の計測を行うようにした孔路位置計測装置において、
前記センサプローブ(1)を前記掘削孔(2)又は管路内に挿入した後、前記センサプローブ(1)のプローブ軸方向(P1)と前記掘削孔(2)又は管路の軸方向(P2)又は長手方向と平行となるまでの一定距離を設定し、前記一定距離の間、前記演算部(7)における方位演算は行わず、前記センサプローブ(1)は直進しているものとすることを特徴とする孔路位置計測装置。
【請求項4】
前記一定距離は、前記プローブ軸方向(P1)と前記掘削孔(2)又は管路の軸方向(P2)又は長手方向とのずれ角度(θ)が0となるまでの距離とすることを特徴とする請求項3記載の孔路位置計測装置。
【請求項1】
掘削孔(2)又は管路内を移動し角速度計(10)及び加速度計(11)を有するセンサプローブ(1)からのデータにより姿勢・方位角演算を演算部(7)で行い、前記センサプローブ(1)に接続されたケーブル(3)のケーブル速度(5a)をケーブル測長器(5)にて計測し、前記姿勢・方位角及びケーブル速度の演算により前記掘削孔(2)の計測を行うようにした孔路位置計測方法において、
前記センサプローブ(1)を前記掘削孔(2)又は管路内に挿入した後、前記センサプローブ(1)のプローブ軸方向(P1)と前記掘削孔(2)又は管路の軸方向(P2)又は長手方向と平行となるまでの一定距離を設定し、前記一定距離の間、前記演算部(7)における方位演算は行わず、前記センサプローブ(1)は直進しているものとすることを特徴とする孔路位置計測方法。
【請求項2】
前記一定距離は、前記プローブ軸方向(P1)と前記掘削孔(2)又は管路の軸方向(P2)又は長手方向とのずれ角度(θ)が0となるまでの距離とすることを特徴とする請求項1記載の孔路位置計測方法。
【請求項3】
掘削孔(2)又は管路内を移動し角速度計(10)及び加速度計(11)を有するセンサプローブ(1)からデータにより姿勢・方位角演算を演算部(7)で行い、前記センサプローブ(1)に接続されたケーブル(3)のケーブル速度(5a)をケーブル測長器(5)にて計測し、前記姿勢・方位角及びケーブル速度の演算により前記掘削孔(2)の計測を行うようにした孔路位置計測装置において、
前記センサプローブ(1)を前記掘削孔(2)又は管路内に挿入した後、前記センサプローブ(1)のプローブ軸方向(P1)と前記掘削孔(2)又は管路の軸方向(P2)又は長手方向と平行となるまでの一定距離を設定し、前記一定距離の間、前記演算部(7)における方位演算は行わず、前記センサプローブ(1)は直進しているものとすることを特徴とする孔路位置計測装置。
【請求項4】
前記一定距離は、前記プローブ軸方向(P1)と前記掘削孔(2)又は管路の軸方向(P2)又は長手方向とのずれ角度(θ)が0となるまでの距離とすることを特徴とする請求項3記載の孔路位置計測装置。
【図1】

【図2】
【図3】

【図4】
【図2】
【図3】
【図4】
【公開番号】特開2013−108834(P2013−108834A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−253745(P2011−253745)
【出願日】平成23年11月21日(2011.11.21)
【出願人】(000203634)多摩川精機株式会社 (669)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月21日(2011.11.21)
【出願人】(000203634)多摩川精機株式会社 (669)
【Fターム(参考)】
[ Back to top ]