
宇宙打ち上げ機の海上着陸及び関連のシステム及び方法
ブースター段及び/又はこの他の部分を海上及び他の水域上のプラットフォーム上に着陸させて回収するための打ち上げ機システム及び方法を開示する。一実施形態では、再使用型宇宙打ち上げ機を沿岸の打ち上げ地点から海上の軌道で打ち上げる。ブースターエンジン停止及び上段の分離後、ブースター段は、船尾からの向きで地球の大気圏に再突入する。次に、ブースターエンジンを再始動し、ブースター段は、予め位置決めされた海上航行プラットフォームのデッキ上への垂直動力式着陸を実行する。一実施形態では、ブースター段が海上航行プラットフォームの方向に地球の大気圏を通って滑空する時に、双方向空力制御面がブースター段の軌道を制御する。海上航行プラットフォームは、自己のリアルタイムの位置をブースター段に送信することができるので、ブースター段は、漂流及び/又は他のファクタによる海上航行プラットフォームの位置の誤差を補正することができる。着陸後、海上航行プラットフォームは、例えば、曳航船によって曳航することができ、又は修理及び再使用ためにブースター段を沿岸の打ち上げ地点又は他の地点までそれ自体の推進システムを使用して輸送して戻すことができる。別の実施形態では、ブースター段は、輸送のための他の船舶に積み替えることができる。更に別の実施形態では、ブースターは、海上又は他の着陸地点からの輸送中に修復することができる。
【発明の詳細な説明】
【技術分野】
【0001】
〔引用により組み込まれる関連出願への相互参照〕
本出願は、「途中の打ち上げ機修復を含む宇宙打ち上げ機の海上着陸及び関連のシステム及び方法(SEA LANDING OF SPACE LAUNCH VEHICLES AND ASSOCIATED SYSTEMS AND METHODS, INCLUDING EN ROUTE VEHICLE REFURBISHMENT)」という名称の2009年6月17日出願の米国特許仮出願第61/218,029号明細書、及び「宇宙打ち上げ機の海上着陸及び関連のシステム及び方法(SEA LANDING OF SPACE LAUNCH VEHICLES AND ASSOCIATED SYSTEMS AND METHODS)」という名称の2009年6月15日出願の米国特許仮出願第61/187,243号明細書に対する優先権を請求するものであり、これらの両方は、引用によりその内容全体が本明細書に組み込まれている。
【0002】
本出願は、以下の特許出願の主題の全体を引用により組み込んでいる:「展開可能なフレア面を有するロケット及び関連のシステム及び方法(ROCKETS WITH DEPLOYABLE FLARE SURFACES, AND ASSOCIATED SYSTEMS AND METHODS)」という名称の2009年2月24日出願の米国特許仮出願第61/155,115号明細書、「固定のかつ展開可能な減速面及び/又は成形燃料タンクを有する打ち上げ機及び関連のシステム及び方法(LAUNCH VEHICLES WITH FIXED AND DEPLOYABLE DECELERATION SURFACES, AND/OR SHAPED FUEL TANKS, AND ASSOCIATED SYSTEMS AND METHODS)」という名称の2010年2月24日出願の米国特許本出願第12/712,156号明細書、「高速打ち上げ機で使用するための双方向制御面及び関連のシステム及び方法(BIDIRECTIONAL CONTROL SURFACES FOR USE WITH HIGH SPEED VEHICLES, AND ASSOCIATED SYSTEMS AND METHODS)」という名称の2009年6月15日出願の米国特許仮出願第61/187,268号明細書、及び「高速打ち上げ機で使用するための双方向制御面及び関連のシステム及び方法(BIDIRECTIONAL CONTROL SURFACES FOR USE WITH HIGH SPEED VEHICLES, AND ASSOCIATED SYSTEMS AND METHODS)」という名称の2010年2月24日出願の米国特許本出願第12/712,083号明細書。
【0003】
本発明の開示は、一般的に宇宙打ち上げ機に関し、より詳細には、宇宙打ち上げ機を海上に着陸させるための及び/又は着陸地点から途中でこのような打ち上げ機を修復するためのシステム及び方法に関する。
【背景技術】
【0004】
ロケット動力式打ち上げ機は、人間及び人間以外のペイロードを宇宙空間に運ぶために長年使用されている。ロケットは、最初の人類を月へと送り、地球の軌道に多くの衛星を打ち上げ、無人宇宙探査機を打ち上げ、かつ軌道を周回する国際宇宙ステーションに補給品及び人員を打ち上げている。
【0005】
有人及び無人宇宙飛行の急速な進歩にも関わらず、宇宙飛行士、衛星、及び他のペイロードを宇宙空間に送ることは、依然として費用のかかる計画である。この1つの理由は、最も従来型の打ち上げ機は一度しか使用されず、従って、「使い捨て型打ち上げ機」又は「ELV」と呼ばれる。再使用型打ち上げ機(RLV)の利点は、宇宙空間への低コストのアクセスを提供する潜在性を含む。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許仮出願第61/155,115号明細書
【特許文献2】米国特許本出願第12/712,156号明細書
【特許文献3】米国特許仮出願第61/187,268号明細書
【特許文献4】米国特許本出願第12/712,083号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
NASAのスペースシャトルは、大部分が再使用可能であるが、再使用可能構成要素の修理は、費用と時間を消費する処理であり、広大な地上インフラストラクチャーを必要とする。更に、再突入及び着陸に必要な付加的なシャトルシステムは、シャトルのペイロード機能を低下させる。商業的圧力が高まる時に、人間及び人間以外のペイロードのための宇宙空間への低コストアクセスの必要性が依然として存在する。
【図面の簡単な説明】
【0008】
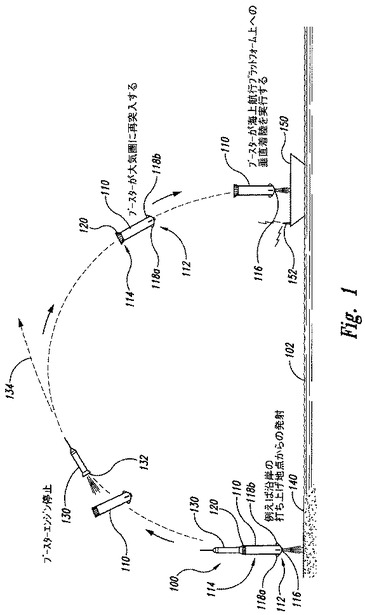
【図1】本発明の開示の実施形態により海上航行プラットフォーム上に着陸する宇宙打ち上げ機のミッションプロフィールを示す概略図である。
【図2】本発明の開示の実施形態により陸上又は他の打ち上げ地点から宇宙打ち上げ機を打ち上げて、海上航行プラットフォーム上に宇宙打ち上げ機を着陸させるためのルーチンを示す流れ図である。
【発明を実施するための形態】
【0009】
本発明の開示のある一定の態様は、一般的に海上航行プラットフォーム上への再使用型打ち上げ機の垂直動力式着陸及びシステム及び方法に向けられる。本発明の開示の他の態様は、水上又は他の着陸地点からの途中の再使用型打ち上げ機の修復に関する。本発明の開示の様々な実施形態の完全な理解をもたらすために、以下の説明及び図1及び2にある一定の詳細を説明する。しかし、当業者は、以下に説明する詳細のいくつかを含まずとも、異なる構成、配置、及び/又は構成要素を有する他の実施形態を実施可能であることを認めるであろう。特に、本発明の開示の他の実施形態は、付加的要素を含んでもよく、図1及び2を参照して以下で説明する要素又は特徴の1つ又はそれよりも多くが欠けてもよい。更に、宇宙打ち上げ機及び宇宙打ち上げ機の打ち上げ及び着陸に多くの場合に関連する公知の構造及び処理を説明するいくつかの詳細については、本発明の開示の様々な実施形態を不要に曖昧にするのを避けるために以下の説明には説明しない。
【0010】
図では、同一の参照番号が同一又は少なくとも一般的に同様の要素を識別する。いずれかの特定の要素の説明を円滑にするために、いずれの参照番号の1つ又は複数の最上位桁も、その要素が最初に紹介された図を指す。例えば、要素110は、図1に関連して最初に紹介されて説明されている。
【0011】
宇宙打ち上げ機は、一般的に、飛行経路に沿った沿岸の打ち上げ地点から打ち上げられて経路から離脱し、自己の軌道のほとんどにわたって海上にある。この軌道は、ロケットの上空通過に関わる潜在的危険性に一般の人々をさらさないようにし、その結果、ブースター段が水中に落下することになる。しかし、水上着陸は、多くの理由によりブースター段の再使用を高価かつ困難にする。例えば、海水は、ロケット構成要素に対して非常に腐食性が高い可能性がある。更に、ロケット構成要素の多くは使用中に非常に高温になり、これらの高温の構成要素を冷たい海水で急冷すると、亀裂及び他の形態の損傷を引き起こす可能性がある。パラシュートによる着陸後の固体ロケット段の回収及び再使用は可能であり、これは、固体ロケットモータは、点火後は殆ど空のケーシングに過ぎないからである。しかし、液体燃料ロケット段は非常により複雑である。その結果、あるとしても僅かの液体燃料ロケット段だけが水上着陸後に再使用される。
【0012】
ブースター段を陸上に着陸させるための概念が存在する。これらの概念は、ブースター段を飛行機のように水平に着陸させるか、又は自己の動力の下で又はパラシュート又は他の手段によって垂直に着陸させることを含む。しかし、これらの手法の全ては、あらゆる発射方位角及び潜在的な射程着陸区域のための地上の着陸地点を必要とするので、運用上の柔軟性を制限する。
【0013】
ブースター段が上段から分離された後に自己のロケットエンジンを再始動して、打ち上げ地点に飛行して戻るという他の概念も提案されている。打ち上げ地点に来た状態で、ブースター段は、滑走路上への水平着陸、又は動力又はパラシュートのような他の手段による垂直着陸のいずれかを実行することになる。しかし、これらの手法のいずれも、帰還操作を実行するためのかなりの積載量の推進剤をロケットに運搬させる必要があり、軌道へのペイロード機能を低下させる。
【0014】
図1は、本発明の開示の実施形態により海上航行プラットフォーム上への垂直動力式着陸を実行する再使用型打ち上げ機の飛行プロフィールを示す概略図である。図示の実施形態では、多段式軌道打ち上げ機100は、第1又はブースター段110及び第2又は上段130を含む。ブースター段110は、前方端部114の方向に位置決めされた展開可能な空力面120と、船尾端部112の方向に位置決めされた1つ又はそれよりも多くのロケットエンジン116とを備えた段間構造を含むことができる。ロケットエンジン116は、例えば、液体酸素/水素エンジン、液体酸素/石油又はRP−1エンジンなどのような液体燃料ロケットエンジンを含むことができる。他の実施形態では、ロケットエンジン116は、固体推進剤を含むことができる。以下でより詳細に説明するように、ブースター段110の船尾端部112は、ブースター段110の上昇及び降下軌道の両方を制御するための(制御面118a、118bなどとして別々に識別される)複数の移動可能制御面118も含むことができる。
【0015】
図示の実施形態では、ブースター段110の上に上段130を積み重ねているが、他の実施形態では、打ち上げ機100及びこの変形は、本発明の開示の精神又は範囲から逸脱することなく他の構成を有することができる。例えば、一実施形態では、上段130及びブースター段110は、上昇中は、適切な分離システムにより並列に位置決めされ、相互に取り付けることができる。別の実施形態では、2つ又はそれよりも多くのブースター段110又はこの変形は、「ストラップ・オン」タイプの構成で上段130の周囲に位置決めすることができる。従って、本発明の開示は、図1に示す特定の打ち上げ機の構成に限定されない。
【0016】
図示の実施形態では、打ち上げ機100は、沿岸又は他の陸上の打ち上げ地点140から離陸し、次に、海洋102上に向う。この実施形態の一態様では、海上航行プラットフォーム150は、自己の位置を打ち上げ機100にリアルタイムで通信するための放送局152を含むことができる。この情報により、打ち上げ機100及び/又はブースター段110は、プラットフォーム150を目的地とする自己の飛行経路を継続的に検査及び/又は調節することができる。プラットフォーム150が漂流型船舶の場合、プラットフォーム150は、海洋の流れの強さ及び方向、風の強さ及び方向、漂流の現在の速度及び方向などのような様々な既存条件に基づいてプラットフォーム150の将来的な位置を自動的に予測するプラットフォーム位置予測器(例えば、適切な処理デバイス、メモリ、及び関連するコンピュータ実行可能命令)も含むことができる。例えば、プラットフォーム位置予測器は、打ち上げ機の着陸の予想時刻におけるプラットフォームの位置を予測するように構成することができる。更に、放送局152は、この情報をリアルタイムで打ち上げ機110及び/又はブースター段110に送信することができるので、打ち上げ機100及び/又はブースター段110は、この情報を利用して自己の飛行経路を調節し、より正確に着陸地点を目的地とすることができる。高高度でのブースターエンジン停止(BECO)後、ブースター段110は上段130から分離し、弾道軌道に沿って進む。次に、1つ又は複数の上段エンジン132(例えば、液体燃料エンジン)が点火して、上段130を軌道突入又は他の目的地へのより高い軌道134の方向に推進する。ブースター段110が地球の大気圏に再突入すると、それは、船尾端部112が海上航行着陸プラットフォーム150に向けて運動及び滑空の方向を指向するように方向転換する。別の実施形態では、ブースター段110は、機首から大気圏に再突入し、次に、着陸直前に船尾からの向きに方向転換することができる。更に別の実施形態では、ブースター段110が機首から大気圏に再突入して機首が下向き方向で着陸することができるように、ブースター段110の前方端部114に着陸用ロケット及び/又は適切な着陸ギア構造を取り付けることができる。
【0017】
特定の打ち上げ軌道に応じて、海上航行プラットフォーム150は、沿岸の打ち上げ地点140から100マイル又はそれよりも遠い射程に位置決めすることができる。ブースター段110が海上航行プラットフォーム150の方向に降下する時に、ブースター段110は、放送局152から受信したプラットフォーム位置データに基づいて、プラットフォーム150を目的地とする自己の滑空経路を調節することができる。追加的に又は代替的に、海上航行プラットフォーム150は、プラットフォーム150を所定の位置に固定し、又は必要に応じてプラットフォーム150を移動して漂流及び/又はブースター軌道の変化に対して調節するために、水中又は部分的に水中の推進システム(例えば、プロペラ又は他の推進装置を有する)を含むことができる。ケーブルを備えた1つ又はそれよりも多くのボートも、プラットフォーム150を固定し、又は必要に応じてプラットフォーム150を移動して漂流及び/又はブースター軌道の変化に対して調節するために使用することができる。
【0018】
ブースター段110が海上航行プラットフォーム150の方向に降下する時に、ブースター段110は、船尾端部112上に位置決めされた空力制御面118、及び/又は前方端部114の方向に位置決めされた展開可能な制御面120を用いて自己の滑空経路を制御することができる。この実施形態の一態様において、展開可能な制御面114は、ブースター段110の重心(CG)の後方の空力抗力を発生させるために、例えば、シャトルコックの形で外向きに広がり又は展開する空力面を含むことができ、これが、ブースター段110を船尾からの向きに一定に保つのを助ける。この実施形態の別の態様では、ブースター段110の船尾端部112の方向に位置決めされた移動可能空力制御面118は、打ち上げ機100が前方方向に移動している上昇中及びブースター段110が海上航行プラットフォーム150の方向に後方方向に移動している降下中の両方において、ブースター段110の姿勢及び/又は軌道を制御可能な双方向制御面を含むことができる。従って、この実施形態の一態様では、空力制御面118は、双方向の超音波制御面である。更に別の実施形態では、例えば、ブースター段110の前方端部114から適切なパラシュートシステムを展開し、降下の全体又は一部において降下の速度を減速及び/又は他の方法で制御することができる。
【0019】
ブースター段110がプラットフォーム150の上方の適切な位置まで降下した(例えば、一部の実施形態では、約100,000フィートから約1,000フィート、又は他の実施形態では約10,000フィートから約3,000フィート)後に、ブースター段110は、自己の降下を減速するためにブースターエンジン116を再始動する。次に、ブースター段110は、低速でプラットフォーム150上への垂直動力式着陸を実行する。例えば、ブースター段110は、毎秒60フィートの降下速度から毎秒1フィート又はそれ未満に減速することができ、着陸中のブースター段110の姿勢及び/又は位置を制御するためにブースターエンジン116のジンバル及び/又は姿勢制御のためのスラスタを用いて、着陸用プラットフォーム150上に着陸することができる。一実施形態では、ブースター段110は、適切な衝撃吸収着陸ギア上に着陸することができる。他の実施形態では、本発明の開示に従って海上航行プラットフォーム150上にブースター段110を適切に着陸させるために他の着陸手段を利用することができる。
【0020】
別の実施形態では、1つ又はそれよりも多くのジェットエンジン(図示せず)をブースター段110の船尾端部112又は他の部分に適切に取り付けて、垂直着陸操作の全て又は一部分を実行することができる。ジェットエンジンは、ブースター段の降下中に始動することができ、ブースターエンジン116の再始動と組み合わせて又はその代わりに使用することができる。ジェットエンジンは、ブースターエンジン116よりも燃料効率が良く、結果として、プラットフォーム150上への着陸中にブースター段110のより多くのホバリング時間及びより優れた制御をもたらすことができる。一実施形態では、ジェットエンジンは、ジェットエンジンを始動する前に展開してブースター段110を減速させる適切なパラシュートシステムと組み合わせて使用することができる。
【0021】
一実施形態では、海上航行プラットフォーム150は、ブースター段110を着陸させて輸送するように構成された適切なデッキを備えた浮遊型外航バージ船とすることができる。一実施形態では、プラットフォーム150は、デッキの運動を最小限にするか又は少なくとも軽減して固定又は比較的固定位置に保つための水中スラスタを有する半潜水型海洋掘削プラットフォームのようなより複雑な船舶の一部分とすることができる。バージ船の実施形態では、着陸後、海上航行プラットフォーム150は、再使用ための修理及び/又は修復のために沿岸の打ち上げ地点140又は他の港に曳航して戻すことができる。一実施形態では、海上航行プラットフォーム150は、曳航船又は他の適切な船舶によって曳航することができる。他の実施形態では、海上航行プラットフォーム150は、ブースター段110を打ち上げ地点140又は他の港に輸送して戻すために、自己自体の推進システムを含むことができる。
【0022】
図1を参照して上述した本発明の開示の実施形態に関連していくつかの利点が存在する。例えば、海上航行プラットフォーム上に着陸させることによってブースター段110を回収すると、多段式軌道打ち上げ機の打ち上げに関わるコストを低減する。更に、垂直動力式着陸を実行することにより、ブースター段は、再使用に必要な修理量を最小限にするか又は少なくとも軽減する方法で回収される。更に、上述の開示の実施形態は、ミッション発射方位角及び/又は射程着陸地点が変わる時に、海上航行プラットフォーム150を異なる海洋区域に移動することができるので、軌道打ち上げ機の運用上の柔軟性を改善することができる。更に、海上航行プラットフォーム150は、他の地点(例えば、他の沿岸打ち上げ地点)からの打ち上げをサポートするために世界の他の地域に移動することさえ可能である。沿岸の打ち上げ地点からの打ち上げに加えて、打ち上げ機100は、海上航行プラットフォーム又は船舶上で海から打ち上げて、海上航行プラットフォーム150上に射程着陸させることができる。このような実施形態は、ペイロード機能を増大させるために海上プラットフォームからの赤道上の打ち上げに対して有利である場合がある。代替的に、他の実施形態では、打ち上げ機100を海上航行プラットフォームから打ち上げて、次に、陸上への動力式垂直着陸を実行することによってブースター110を回収することができる。
【0023】
上述の開示の実施形態は、大気圏に再突入してプラットフォーム150の方向に飛行する時に、ブースター段110を最も効率的な又は少なくとも非常に効率的な軌道で飛行させることにより、打ち上げ機100のペイロード機能を改善することができる。ペイロード機能が改善するのは、陸上の着陸地点に帰還するためにブースター段110によって推進力を維持する必要がないからである。更に、上段130の分離後にブースター段110が着陸する所定の地点がどこであれ、そこに海上航行プラットフォーム150を位置決めすることができる。上述の実施形態は、陸上着陸に関するブースター段110の飛行軌道の逆進に関わる一般の人々の安全上の問題も軽減し又は解消することができる。
【0024】
上述の開示の実施形態はまた、ブースター段110を沿岸の打ち上げ地点140又は他の陸上の修理施設のいずれかにいかに輸送して戻すかという問題も解決することができる。より具体的には、打ち上げ機のブースター段は、通常は非常に大型で、結果として、完全に組み立てられたこれらを輸送することは、重大な運搬上の課題及びコストを生じることがある。ブースター段が陸上に射程着陸することになっている場合、ブースター段を打ち上げ地点又は他の修理地点のいずれかに輸送して戻すという問題を解決する必要があることになり、ブースター段ほど大型のもの陸上移動は、運搬上及び財政上の課題である。対照的に、海上輸送は、ブースター段のような大型貨物を長距離にわたって輸送するコスト効率の良い手段である。本発明の開示の海上航行プラットフォーム150は、比較的低コストで打ち上げ地点の近くの港に曳航して修理及び再使用ために荷下ろしすることができる。
【0025】
図1は、ブースター段の回収という関連で本発明の開示の実施形態を説明しているが、本発明の開示は、正確な垂直動力式着陸機能による軌道再突入打ち上げ機の回収に適用することもできる。この手法の1つの利点は、再突入打ち上げ機を着陸させるのに適切なあらゆる海洋区域又は他の水域(例えば、海峡、湖、その他)内に海上航行プラットフォーム150を位置決めすることができる点である。更に、複数の海上航行プラットフォームを世界中の所定の地点に位置決めして、必要に応じて、中断されたミッションのための予備の着陸区画を提供することができる。
【0026】
図2は、本発明の開示の実施形態により宇宙打ち上げ機、例えば、軌道打ち上げ機を打ち上げて着陸させる方法のフロールーチン200を示している。この実施形態の一態様において、ルーチン200は、図1を参照して上述した打ち上げ機100によって実施することができる。別の実施形態では、ルーチン200又はこの一部分は、軌道打ち上げ機、非軌道打ち上げ機、深宇宙及び惑星間打ち上げ機などを含む他の種類の打ち上げ機によって利用することができる。
【0027】
ブロック202において、ルーチンは、ブースターエンジンの点火及び打ち上げ地点(例えば、沿岸の打ち上げ地点のような陸上の打ち上げ地点)からの発射で始まる。上述のように、他の実施形態では、ミッションは、浮遊プラットフォーム、バージ船、船舶、又は他の大型船のような海上の発射台からの発射で開始することができる。ブロック204において、所定の高度でブースターエンジン停止が発生する。ブロック206において、上段がブースター段から分離し、1つ又は複数の上段エンジンを始動する。
【0028】
ブロック208において、ブースター段は、上段の分離後に自己の弾道軌道に従いながら方向転換する。より具体的には、ブースター段は、船尾からの向きに飛行するように方向転換する。一実施形態では、ブースター段の方向転換は、ブースター段のCGの後方の抗力を発生させるためにブースター段の前方端部から外側に広がる展開可能な空力面(例えば、フレア面)を用いて達成することができる。他の実施形態では、ブースター段を方向転換するために、空力制御面に加えて又はこの代わりにスラスタ(例えば、ヒドラジンスラスタのようなロケットスラスタ)を利用することができる。例えば、ブースター段の方向転換が、空力制御面が効果のない宇宙空間で発生する場合、ブースター段を方向転換するためにスラスタを利用することができる。
【0029】
ブロック210において、空力抗力及び/又は制御面は、打ち上げ機が地球の大気圏に再突入する前に又はその途中に展開される。ブロック212において、ブースター段は大気圏に再突入して、海上航行着陸プラットフォームと連絡を取る。代替的に、打ち上げ機は、再突入前に海上航行着陸プラットフォームと連絡を取ることができ、又は飛行全体にわたって海上航行プラットフォームと連絡を取ることができる。ブロック214において、ブースター段は、海上航行着陸プラットフォームの方向に滑空し又は他の方法で弾道軌道に従う。
【0030】
判断ブロック216において、ルーチンは、海上航行プラットフォーム上にブースター段を正確に位置決めするためにブースター段の滑空経路を調節する必要があるかを判断する。調節する必要がない場合、ルーチンはブロック220に進み、ブースター段は、海上航行プラットフォームの方向に滑空し続ける。滑空経路の調節が望ましい場合は、ルーチンは、ブロック218に進み、ブースター段の滑空経路を変更するために空力制御面を移動する。ブースター段の滑空経路の変更の代わりに又は追加的に、ルーチンはまた、例えば、着陸用プラットフォームに付随する推進システムを用いて又はプラットフォームを曳航することにより、着陸用プラットフォームの位置を調節することができる。
【0031】
滑空経路及び/又は着陸用プラットフォームの位置を調節した後、ルーチンは、判断ブロック222に進み、着陸の最終段階のために着陸用プラットフォーム上にブースター段が適切に位置決めされているかを判断する。位置決めされていない場合、ルーチンは、判断ブロック216に戻って繰り返す。打ち上げ機が最終着陸手順のために着陸用プラットフォーム上の適切な位置にある場合、ルーチンは、ブロック224に進み、ブースターエンジンを再点火する。ブロック226において、打ち上げ機は、海上航行プラットフォーム上への垂直動力式着陸を実行し、ルーチンの飛行部分は終了する。
【0032】
しかし、一実施形態では、ルーチン200は、プラットフォーム及びブースター段を修理及び再使用ために打ち上げ地点又は他の港に移動して戻すことによってブロック228で継続することができる。ブロック230において、ブースター段は、必要に応じて修理され、新しい打ち上げ機上に取り付けられる。ブロック230から、ルーチンはブロック202に戻り、新しい打ち上げ機に関して繰り返す。
【0033】
特定的な実施形態では、海上航行プラットフォームは、発射台からの方位角及び距離の両方で打ち上げ機の第2段の分離を改善及び/又は最適化する方法で位置決めすることができる。例えば、少なくとも一部の事例において、海上航行プラットフォームを移動する機能により、ブースターの着陸地点がそれほど厳しく制限されないので、打ち上げブースターが打ち上げ機の残り部分から分離するために利用可能な地点の範囲を拡大することができる。ブースターの降下の軌道を制御する機能により、利用可能な着陸地点の範囲を更に拡大することができる。
【0034】
上述の実施形態のいずれにおいても、打ち上げ機が着陸した状態で、処理全体は、打ち上げ機を迅速に点検に戻すのを容易にするための付加的な段階を含むことができる。例えば、打ち上げ機は、打ち上げ地点へ戻る輸送時間を短縮するために、比較的低速で海上を航行するプラットフォームからより高速な水上艦に積み替えることができる。積み替えに加えて又はこの代わりに、再使用型打ち上げ機は、着陸地点から打ち上げ地点への輸送中に修復することができる。両方の特徴の態様を、海上で回収される打ち上げ機という関連で以下に更に説明する。他の実施形態では、これらの特徴の特定の態様(例えば、着陸地点からの途中で打ち上げ機を修復する)は、陸上の回収を含む他の回収構成に適用することができる。
【0035】
特定的な実施形態では、打ち上げ機(例えば、第1段の再使用可能ブースターシステム又はRBS)は、海上航行着陸プラットフォーム上への着陸後かつ処理職員が打ち上げ機に近づく前に、直ちに及び/又は自律で安全な状態に置かれる。自律の安全活動は、推進タンク及び圧力ボトルの排出及びあらゆる空力面の格納を含むことができる。打ち上げ機は、次に、沿岸の打ち上げ地点又は積み替え地点により早く戻るために別のより小型の船舶に積み替えることができる。別の実施形態では、打ち上げ機は、着陸用プラットフォームのデッキに固定することができ、プラットフォームは、沿岸の打ち上げ地点又は積み替え地点に曳航されるか又は自己の推進力の下で移動して戻ることができる。いずれの場合にも、打ち上げ機は、海上輸送のための垂直又は水平位置に関わらず、海上クレーン(又は他の適切な装置)によって移動して打ち上げ機を固定し、打ち上げ地点にある打ち上げ機処理施設に戻すためにドックで降ろしてトラックに載せることができる。
【0036】
途中の間及び打ち上げ機処理施設では、打ち上げ機は、次の打ち上げのために処理することができる。各打ち上げの前に通常行われる修復活動は、整備項目(ある場合)、洗浄、ガス圧ボトルの再充填、電池の再充電、必要に応じて断熱システム素材の修復、及び/又は空気圧、アビオニクス、及び水圧サブシステムの機能試験を含むことができる。途中の間及び打ち上げ機処理施設では、打ち上げ機は、ペイロード及びペイロードフェアリングと予め統合することが可能な使い捨て型上段と嵌合することができる。他の場合には、打ち上げ機は、ペイロードモジュールと直接に嵌合することができる。定期的に、エンジンの分解修理のような大規模点検も実施することができる。
【0037】
上述の処理活動中に、システム全体が単一の海上航行プラットフォームを含み、これを用いて打ち上げ機を沿岸の打ち上げ地点に輸送して戻す場合には、最初の打ち上げ機が打ち上げ地点に戻る輸送中に第2の打ち上げ機の着陸のために、打ち上げ機を降ろした後にプラットフォームを着陸区画に再び位置決めすることができる。システム全体が2つの海上航行プラットフォームを含む場合には、一方の海上航行プラットフォームが飛行と飛行の間に着陸区画に残り、他方のプラットフォームが沿岸に戻る。更に別の実施形態では、システムが2機の打ち上げ機と、1つの海上航行着陸プラットフォームと、打ち上げ機をプラットフォームから打ち上げ地点に輸送する別の船舶とを含み、この場合も、飛行と飛行の間に1つの着陸用プラットフォームが着陸区画に残ることができる。別の船舶は、特定的な実施形態では、海洋船舶又は空挺船を含むことができる。
【0038】
上述の実施形態のいずれにおいても、例えば、海洋環境で処理を確実に実行することができ、かつ後続処理と適正に順序付けられるという条件の下で、打ち上げ機の輸送中に修復処理のあらゆる適切な態様を実行することができる。
【0039】
本明細書では、例証目的のために本発明の具体的な実施形態を説明したが、本発明の様々な実施形態の精神及び範囲から逸脱することなく様々な修正を加えることができることは以上から認められるであろう。例えば、上記では海上に打ち上げ機を着陸させるという関連で本発明の開示の様々な実施形態を説明したが、他の実施形態では、例えば、湖、湾、大洋、海峡、又は場合によっては大きい川を含む他の水域上に打ち上げ機を着陸させるために上述のシステム及び方法を使用することができる。更に、上記では本発明の開示のある一定の実施形態に関連する様々な利点をこれらの実施形態の関連で説明したが、他の実施形態も、このような利点を示すことができ、本発明の範囲に収めるために全ての実施形態がこれらの利点を示すことは必ずしも必要ではない。従って、本発明は、添付の特許請求の範囲による以外は制限されない。
【符号の説明】
【0040】
100 打ち上げ機
110 ブースター段
112 船尾端部
114 前方端部
118a、118b 移動可能制御面
120 展開可能な空力面
【技術分野】
【0001】
〔引用により組み込まれる関連出願への相互参照〕
本出願は、「途中の打ち上げ機修復を含む宇宙打ち上げ機の海上着陸及び関連のシステム及び方法(SEA LANDING OF SPACE LAUNCH VEHICLES AND ASSOCIATED SYSTEMS AND METHODS, INCLUDING EN ROUTE VEHICLE REFURBISHMENT)」という名称の2009年6月17日出願の米国特許仮出願第61/218,029号明細書、及び「宇宙打ち上げ機の海上着陸及び関連のシステム及び方法(SEA LANDING OF SPACE LAUNCH VEHICLES AND ASSOCIATED SYSTEMS AND METHODS)」という名称の2009年6月15日出願の米国特許仮出願第61/187,243号明細書に対する優先権を請求するものであり、これらの両方は、引用によりその内容全体が本明細書に組み込まれている。
【0002】
本出願は、以下の特許出願の主題の全体を引用により組み込んでいる:「展開可能なフレア面を有するロケット及び関連のシステム及び方法(ROCKETS WITH DEPLOYABLE FLARE SURFACES, AND ASSOCIATED SYSTEMS AND METHODS)」という名称の2009年2月24日出願の米国特許仮出願第61/155,115号明細書、「固定のかつ展開可能な減速面及び/又は成形燃料タンクを有する打ち上げ機及び関連のシステム及び方法(LAUNCH VEHICLES WITH FIXED AND DEPLOYABLE DECELERATION SURFACES, AND/OR SHAPED FUEL TANKS, AND ASSOCIATED SYSTEMS AND METHODS)」という名称の2010年2月24日出願の米国特許本出願第12/712,156号明細書、「高速打ち上げ機で使用するための双方向制御面及び関連のシステム及び方法(BIDIRECTIONAL CONTROL SURFACES FOR USE WITH HIGH SPEED VEHICLES, AND ASSOCIATED SYSTEMS AND METHODS)」という名称の2009年6月15日出願の米国特許仮出願第61/187,268号明細書、及び「高速打ち上げ機で使用するための双方向制御面及び関連のシステム及び方法(BIDIRECTIONAL CONTROL SURFACES FOR USE WITH HIGH SPEED VEHICLES, AND ASSOCIATED SYSTEMS AND METHODS)」という名称の2010年2月24日出願の米国特許本出願第12/712,083号明細書。
【0003】
本発明の開示は、一般的に宇宙打ち上げ機に関し、より詳細には、宇宙打ち上げ機を海上に着陸させるための及び/又は着陸地点から途中でこのような打ち上げ機を修復するためのシステム及び方法に関する。
【背景技術】
【0004】
ロケット動力式打ち上げ機は、人間及び人間以外のペイロードを宇宙空間に運ぶために長年使用されている。ロケットは、最初の人類を月へと送り、地球の軌道に多くの衛星を打ち上げ、無人宇宙探査機を打ち上げ、かつ軌道を周回する国際宇宙ステーションに補給品及び人員を打ち上げている。
【0005】
有人及び無人宇宙飛行の急速な進歩にも関わらず、宇宙飛行士、衛星、及び他のペイロードを宇宙空間に送ることは、依然として費用のかかる計画である。この1つの理由は、最も従来型の打ち上げ機は一度しか使用されず、従って、「使い捨て型打ち上げ機」又は「ELV」と呼ばれる。再使用型打ち上げ機(RLV)の利点は、宇宙空間への低コストのアクセスを提供する潜在性を含む。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】米国特許仮出願第61/155,115号明細書
【特許文献2】米国特許本出願第12/712,156号明細書
【特許文献3】米国特許仮出願第61/187,268号明細書
【特許文献4】米国特許本出願第12/712,083号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
NASAのスペースシャトルは、大部分が再使用可能であるが、再使用可能構成要素の修理は、費用と時間を消費する処理であり、広大な地上インフラストラクチャーを必要とする。更に、再突入及び着陸に必要な付加的なシャトルシステムは、シャトルのペイロード機能を低下させる。商業的圧力が高まる時に、人間及び人間以外のペイロードのための宇宙空間への低コストアクセスの必要性が依然として存在する。
【図面の簡単な説明】
【0008】
【図1】本発明の開示の実施形態により海上航行プラットフォーム上に着陸する宇宙打ち上げ機のミッションプロフィールを示す概略図である。
【図2】本発明の開示の実施形態により陸上又は他の打ち上げ地点から宇宙打ち上げ機を打ち上げて、海上航行プラットフォーム上に宇宙打ち上げ機を着陸させるためのルーチンを示す流れ図である。
【発明を実施するための形態】
【0009】
本発明の開示のある一定の態様は、一般的に海上航行プラットフォーム上への再使用型打ち上げ機の垂直動力式着陸及びシステム及び方法に向けられる。本発明の開示の他の態様は、水上又は他の着陸地点からの途中の再使用型打ち上げ機の修復に関する。本発明の開示の様々な実施形態の完全な理解をもたらすために、以下の説明及び図1及び2にある一定の詳細を説明する。しかし、当業者は、以下に説明する詳細のいくつかを含まずとも、異なる構成、配置、及び/又は構成要素を有する他の実施形態を実施可能であることを認めるであろう。特に、本発明の開示の他の実施形態は、付加的要素を含んでもよく、図1及び2を参照して以下で説明する要素又は特徴の1つ又はそれよりも多くが欠けてもよい。更に、宇宙打ち上げ機及び宇宙打ち上げ機の打ち上げ及び着陸に多くの場合に関連する公知の構造及び処理を説明するいくつかの詳細については、本発明の開示の様々な実施形態を不要に曖昧にするのを避けるために以下の説明には説明しない。
【0010】
図では、同一の参照番号が同一又は少なくとも一般的に同様の要素を識別する。いずれかの特定の要素の説明を円滑にするために、いずれの参照番号の1つ又は複数の最上位桁も、その要素が最初に紹介された図を指す。例えば、要素110は、図1に関連して最初に紹介されて説明されている。
【0011】
宇宙打ち上げ機は、一般的に、飛行経路に沿った沿岸の打ち上げ地点から打ち上げられて経路から離脱し、自己の軌道のほとんどにわたって海上にある。この軌道は、ロケットの上空通過に関わる潜在的危険性に一般の人々をさらさないようにし、その結果、ブースター段が水中に落下することになる。しかし、水上着陸は、多くの理由によりブースター段の再使用を高価かつ困難にする。例えば、海水は、ロケット構成要素に対して非常に腐食性が高い可能性がある。更に、ロケット構成要素の多くは使用中に非常に高温になり、これらの高温の構成要素を冷たい海水で急冷すると、亀裂及び他の形態の損傷を引き起こす可能性がある。パラシュートによる着陸後の固体ロケット段の回収及び再使用は可能であり、これは、固体ロケットモータは、点火後は殆ど空のケーシングに過ぎないからである。しかし、液体燃料ロケット段は非常により複雑である。その結果、あるとしても僅かの液体燃料ロケット段だけが水上着陸後に再使用される。
【0012】
ブースター段を陸上に着陸させるための概念が存在する。これらの概念は、ブースター段を飛行機のように水平に着陸させるか、又は自己の動力の下で又はパラシュート又は他の手段によって垂直に着陸させることを含む。しかし、これらの手法の全ては、あらゆる発射方位角及び潜在的な射程着陸区域のための地上の着陸地点を必要とするので、運用上の柔軟性を制限する。
【0013】
ブースター段が上段から分離された後に自己のロケットエンジンを再始動して、打ち上げ地点に飛行して戻るという他の概念も提案されている。打ち上げ地点に来た状態で、ブースター段は、滑走路上への水平着陸、又は動力又はパラシュートのような他の手段による垂直着陸のいずれかを実行することになる。しかし、これらの手法のいずれも、帰還操作を実行するためのかなりの積載量の推進剤をロケットに運搬させる必要があり、軌道へのペイロード機能を低下させる。
【0014】
図1は、本発明の開示の実施形態により海上航行プラットフォーム上への垂直動力式着陸を実行する再使用型打ち上げ機の飛行プロフィールを示す概略図である。図示の実施形態では、多段式軌道打ち上げ機100は、第1又はブースター段110及び第2又は上段130を含む。ブースター段110は、前方端部114の方向に位置決めされた展開可能な空力面120と、船尾端部112の方向に位置決めされた1つ又はそれよりも多くのロケットエンジン116とを備えた段間構造を含むことができる。ロケットエンジン116は、例えば、液体酸素/水素エンジン、液体酸素/石油又はRP−1エンジンなどのような液体燃料ロケットエンジンを含むことができる。他の実施形態では、ロケットエンジン116は、固体推進剤を含むことができる。以下でより詳細に説明するように、ブースター段110の船尾端部112は、ブースター段110の上昇及び降下軌道の両方を制御するための(制御面118a、118bなどとして別々に識別される)複数の移動可能制御面118も含むことができる。
【0015】
図示の実施形態では、ブースター段110の上に上段130を積み重ねているが、他の実施形態では、打ち上げ機100及びこの変形は、本発明の開示の精神又は範囲から逸脱することなく他の構成を有することができる。例えば、一実施形態では、上段130及びブースター段110は、上昇中は、適切な分離システムにより並列に位置決めされ、相互に取り付けることができる。別の実施形態では、2つ又はそれよりも多くのブースター段110又はこの変形は、「ストラップ・オン」タイプの構成で上段130の周囲に位置決めすることができる。従って、本発明の開示は、図1に示す特定の打ち上げ機の構成に限定されない。
【0016】
図示の実施形態では、打ち上げ機100は、沿岸又は他の陸上の打ち上げ地点140から離陸し、次に、海洋102上に向う。この実施形態の一態様では、海上航行プラットフォーム150は、自己の位置を打ち上げ機100にリアルタイムで通信するための放送局152を含むことができる。この情報により、打ち上げ機100及び/又はブースター段110は、プラットフォーム150を目的地とする自己の飛行経路を継続的に検査及び/又は調節することができる。プラットフォーム150が漂流型船舶の場合、プラットフォーム150は、海洋の流れの強さ及び方向、風の強さ及び方向、漂流の現在の速度及び方向などのような様々な既存条件に基づいてプラットフォーム150の将来的な位置を自動的に予測するプラットフォーム位置予測器(例えば、適切な処理デバイス、メモリ、及び関連するコンピュータ実行可能命令)も含むことができる。例えば、プラットフォーム位置予測器は、打ち上げ機の着陸の予想時刻におけるプラットフォームの位置を予測するように構成することができる。更に、放送局152は、この情報をリアルタイムで打ち上げ機110及び/又はブースター段110に送信することができるので、打ち上げ機100及び/又はブースター段110は、この情報を利用して自己の飛行経路を調節し、より正確に着陸地点を目的地とすることができる。高高度でのブースターエンジン停止(BECO)後、ブースター段110は上段130から分離し、弾道軌道に沿って進む。次に、1つ又は複数の上段エンジン132(例えば、液体燃料エンジン)が点火して、上段130を軌道突入又は他の目的地へのより高い軌道134の方向に推進する。ブースター段110が地球の大気圏に再突入すると、それは、船尾端部112が海上航行着陸プラットフォーム150に向けて運動及び滑空の方向を指向するように方向転換する。別の実施形態では、ブースター段110は、機首から大気圏に再突入し、次に、着陸直前に船尾からの向きに方向転換することができる。更に別の実施形態では、ブースター段110が機首から大気圏に再突入して機首が下向き方向で着陸することができるように、ブースター段110の前方端部114に着陸用ロケット及び/又は適切な着陸ギア構造を取り付けることができる。
【0017】
特定の打ち上げ軌道に応じて、海上航行プラットフォーム150は、沿岸の打ち上げ地点140から100マイル又はそれよりも遠い射程に位置決めすることができる。ブースター段110が海上航行プラットフォーム150の方向に降下する時に、ブースター段110は、放送局152から受信したプラットフォーム位置データに基づいて、プラットフォーム150を目的地とする自己の滑空経路を調節することができる。追加的に又は代替的に、海上航行プラットフォーム150は、プラットフォーム150を所定の位置に固定し、又は必要に応じてプラットフォーム150を移動して漂流及び/又はブースター軌道の変化に対して調節するために、水中又は部分的に水中の推進システム(例えば、プロペラ又は他の推進装置を有する)を含むことができる。ケーブルを備えた1つ又はそれよりも多くのボートも、プラットフォーム150を固定し、又は必要に応じてプラットフォーム150を移動して漂流及び/又はブースター軌道の変化に対して調節するために使用することができる。
【0018】
ブースター段110が海上航行プラットフォーム150の方向に降下する時に、ブースター段110は、船尾端部112上に位置決めされた空力制御面118、及び/又は前方端部114の方向に位置決めされた展開可能な制御面120を用いて自己の滑空経路を制御することができる。この実施形態の一態様において、展開可能な制御面114は、ブースター段110の重心(CG)の後方の空力抗力を発生させるために、例えば、シャトルコックの形で外向きに広がり又は展開する空力面を含むことができ、これが、ブースター段110を船尾からの向きに一定に保つのを助ける。この実施形態の別の態様では、ブースター段110の船尾端部112の方向に位置決めされた移動可能空力制御面118は、打ち上げ機100が前方方向に移動している上昇中及びブースター段110が海上航行プラットフォーム150の方向に後方方向に移動している降下中の両方において、ブースター段110の姿勢及び/又は軌道を制御可能な双方向制御面を含むことができる。従って、この実施形態の一態様では、空力制御面118は、双方向の超音波制御面である。更に別の実施形態では、例えば、ブースター段110の前方端部114から適切なパラシュートシステムを展開し、降下の全体又は一部において降下の速度を減速及び/又は他の方法で制御することができる。
【0019】
ブースター段110がプラットフォーム150の上方の適切な位置まで降下した(例えば、一部の実施形態では、約100,000フィートから約1,000フィート、又は他の実施形態では約10,000フィートから約3,000フィート)後に、ブースター段110は、自己の降下を減速するためにブースターエンジン116を再始動する。次に、ブースター段110は、低速でプラットフォーム150上への垂直動力式着陸を実行する。例えば、ブースター段110は、毎秒60フィートの降下速度から毎秒1フィート又はそれ未満に減速することができ、着陸中のブースター段110の姿勢及び/又は位置を制御するためにブースターエンジン116のジンバル及び/又は姿勢制御のためのスラスタを用いて、着陸用プラットフォーム150上に着陸することができる。一実施形態では、ブースター段110は、適切な衝撃吸収着陸ギア上に着陸することができる。他の実施形態では、本発明の開示に従って海上航行プラットフォーム150上にブースター段110を適切に着陸させるために他の着陸手段を利用することができる。
【0020】
別の実施形態では、1つ又はそれよりも多くのジェットエンジン(図示せず)をブースター段110の船尾端部112又は他の部分に適切に取り付けて、垂直着陸操作の全て又は一部分を実行することができる。ジェットエンジンは、ブースター段の降下中に始動することができ、ブースターエンジン116の再始動と組み合わせて又はその代わりに使用することができる。ジェットエンジンは、ブースターエンジン116よりも燃料効率が良く、結果として、プラットフォーム150上への着陸中にブースター段110のより多くのホバリング時間及びより優れた制御をもたらすことができる。一実施形態では、ジェットエンジンは、ジェットエンジンを始動する前に展開してブースター段110を減速させる適切なパラシュートシステムと組み合わせて使用することができる。
【0021】
一実施形態では、海上航行プラットフォーム150は、ブースター段110を着陸させて輸送するように構成された適切なデッキを備えた浮遊型外航バージ船とすることができる。一実施形態では、プラットフォーム150は、デッキの運動を最小限にするか又は少なくとも軽減して固定又は比較的固定位置に保つための水中スラスタを有する半潜水型海洋掘削プラットフォームのようなより複雑な船舶の一部分とすることができる。バージ船の実施形態では、着陸後、海上航行プラットフォーム150は、再使用ための修理及び/又は修復のために沿岸の打ち上げ地点140又は他の港に曳航して戻すことができる。一実施形態では、海上航行プラットフォーム150は、曳航船又は他の適切な船舶によって曳航することができる。他の実施形態では、海上航行プラットフォーム150は、ブースター段110を打ち上げ地点140又は他の港に輸送して戻すために、自己自体の推進システムを含むことができる。
【0022】
図1を参照して上述した本発明の開示の実施形態に関連していくつかの利点が存在する。例えば、海上航行プラットフォーム上に着陸させることによってブースター段110を回収すると、多段式軌道打ち上げ機の打ち上げに関わるコストを低減する。更に、垂直動力式着陸を実行することにより、ブースター段は、再使用に必要な修理量を最小限にするか又は少なくとも軽減する方法で回収される。更に、上述の開示の実施形態は、ミッション発射方位角及び/又は射程着陸地点が変わる時に、海上航行プラットフォーム150を異なる海洋区域に移動することができるので、軌道打ち上げ機の運用上の柔軟性を改善することができる。更に、海上航行プラットフォーム150は、他の地点(例えば、他の沿岸打ち上げ地点)からの打ち上げをサポートするために世界の他の地域に移動することさえ可能である。沿岸の打ち上げ地点からの打ち上げに加えて、打ち上げ機100は、海上航行プラットフォーム又は船舶上で海から打ち上げて、海上航行プラットフォーム150上に射程着陸させることができる。このような実施形態は、ペイロード機能を増大させるために海上プラットフォームからの赤道上の打ち上げに対して有利である場合がある。代替的に、他の実施形態では、打ち上げ機100を海上航行プラットフォームから打ち上げて、次に、陸上への動力式垂直着陸を実行することによってブースター110を回収することができる。
【0023】
上述の開示の実施形態は、大気圏に再突入してプラットフォーム150の方向に飛行する時に、ブースター段110を最も効率的な又は少なくとも非常に効率的な軌道で飛行させることにより、打ち上げ機100のペイロード機能を改善することができる。ペイロード機能が改善するのは、陸上の着陸地点に帰還するためにブースター段110によって推進力を維持する必要がないからである。更に、上段130の分離後にブースター段110が着陸する所定の地点がどこであれ、そこに海上航行プラットフォーム150を位置決めすることができる。上述の実施形態は、陸上着陸に関するブースター段110の飛行軌道の逆進に関わる一般の人々の安全上の問題も軽減し又は解消することができる。
【0024】
上述の開示の実施形態はまた、ブースター段110を沿岸の打ち上げ地点140又は他の陸上の修理施設のいずれかにいかに輸送して戻すかという問題も解決することができる。より具体的には、打ち上げ機のブースター段は、通常は非常に大型で、結果として、完全に組み立てられたこれらを輸送することは、重大な運搬上の課題及びコストを生じることがある。ブースター段が陸上に射程着陸することになっている場合、ブースター段を打ち上げ地点又は他の修理地点のいずれかに輸送して戻すという問題を解決する必要があることになり、ブースター段ほど大型のもの陸上移動は、運搬上及び財政上の課題である。対照的に、海上輸送は、ブースター段のような大型貨物を長距離にわたって輸送するコスト効率の良い手段である。本発明の開示の海上航行プラットフォーム150は、比較的低コストで打ち上げ地点の近くの港に曳航して修理及び再使用ために荷下ろしすることができる。
【0025】
図1は、ブースター段の回収という関連で本発明の開示の実施形態を説明しているが、本発明の開示は、正確な垂直動力式着陸機能による軌道再突入打ち上げ機の回収に適用することもできる。この手法の1つの利点は、再突入打ち上げ機を着陸させるのに適切なあらゆる海洋区域又は他の水域(例えば、海峡、湖、その他)内に海上航行プラットフォーム150を位置決めすることができる点である。更に、複数の海上航行プラットフォームを世界中の所定の地点に位置決めして、必要に応じて、中断されたミッションのための予備の着陸区画を提供することができる。
【0026】
図2は、本発明の開示の実施形態により宇宙打ち上げ機、例えば、軌道打ち上げ機を打ち上げて着陸させる方法のフロールーチン200を示している。この実施形態の一態様において、ルーチン200は、図1を参照して上述した打ち上げ機100によって実施することができる。別の実施形態では、ルーチン200又はこの一部分は、軌道打ち上げ機、非軌道打ち上げ機、深宇宙及び惑星間打ち上げ機などを含む他の種類の打ち上げ機によって利用することができる。
【0027】
ブロック202において、ルーチンは、ブースターエンジンの点火及び打ち上げ地点(例えば、沿岸の打ち上げ地点のような陸上の打ち上げ地点)からの発射で始まる。上述のように、他の実施形態では、ミッションは、浮遊プラットフォーム、バージ船、船舶、又は他の大型船のような海上の発射台からの発射で開始することができる。ブロック204において、所定の高度でブースターエンジン停止が発生する。ブロック206において、上段がブースター段から分離し、1つ又は複数の上段エンジンを始動する。
【0028】
ブロック208において、ブースター段は、上段の分離後に自己の弾道軌道に従いながら方向転換する。より具体的には、ブースター段は、船尾からの向きに飛行するように方向転換する。一実施形態では、ブースター段の方向転換は、ブースター段のCGの後方の抗力を発生させるためにブースター段の前方端部から外側に広がる展開可能な空力面(例えば、フレア面)を用いて達成することができる。他の実施形態では、ブースター段を方向転換するために、空力制御面に加えて又はこの代わりにスラスタ(例えば、ヒドラジンスラスタのようなロケットスラスタ)を利用することができる。例えば、ブースター段の方向転換が、空力制御面が効果のない宇宙空間で発生する場合、ブースター段を方向転換するためにスラスタを利用することができる。
【0029】
ブロック210において、空力抗力及び/又は制御面は、打ち上げ機が地球の大気圏に再突入する前に又はその途中に展開される。ブロック212において、ブースター段は大気圏に再突入して、海上航行着陸プラットフォームと連絡を取る。代替的に、打ち上げ機は、再突入前に海上航行着陸プラットフォームと連絡を取ることができ、又は飛行全体にわたって海上航行プラットフォームと連絡を取ることができる。ブロック214において、ブースター段は、海上航行着陸プラットフォームの方向に滑空し又は他の方法で弾道軌道に従う。
【0030】
判断ブロック216において、ルーチンは、海上航行プラットフォーム上にブースター段を正確に位置決めするためにブースター段の滑空経路を調節する必要があるかを判断する。調節する必要がない場合、ルーチンはブロック220に進み、ブースター段は、海上航行プラットフォームの方向に滑空し続ける。滑空経路の調節が望ましい場合は、ルーチンは、ブロック218に進み、ブースター段の滑空経路を変更するために空力制御面を移動する。ブースター段の滑空経路の変更の代わりに又は追加的に、ルーチンはまた、例えば、着陸用プラットフォームに付随する推進システムを用いて又はプラットフォームを曳航することにより、着陸用プラットフォームの位置を調節することができる。
【0031】
滑空経路及び/又は着陸用プラットフォームの位置を調節した後、ルーチンは、判断ブロック222に進み、着陸の最終段階のために着陸用プラットフォーム上にブースター段が適切に位置決めされているかを判断する。位置決めされていない場合、ルーチンは、判断ブロック216に戻って繰り返す。打ち上げ機が最終着陸手順のために着陸用プラットフォーム上の適切な位置にある場合、ルーチンは、ブロック224に進み、ブースターエンジンを再点火する。ブロック226において、打ち上げ機は、海上航行プラットフォーム上への垂直動力式着陸を実行し、ルーチンの飛行部分は終了する。
【0032】
しかし、一実施形態では、ルーチン200は、プラットフォーム及びブースター段を修理及び再使用ために打ち上げ地点又は他の港に移動して戻すことによってブロック228で継続することができる。ブロック230において、ブースター段は、必要に応じて修理され、新しい打ち上げ機上に取り付けられる。ブロック230から、ルーチンはブロック202に戻り、新しい打ち上げ機に関して繰り返す。
【0033】
特定的な実施形態では、海上航行プラットフォームは、発射台からの方位角及び距離の両方で打ち上げ機の第2段の分離を改善及び/又は最適化する方法で位置決めすることができる。例えば、少なくとも一部の事例において、海上航行プラットフォームを移動する機能により、ブースターの着陸地点がそれほど厳しく制限されないので、打ち上げブースターが打ち上げ機の残り部分から分離するために利用可能な地点の範囲を拡大することができる。ブースターの降下の軌道を制御する機能により、利用可能な着陸地点の範囲を更に拡大することができる。
【0034】
上述の実施形態のいずれにおいても、打ち上げ機が着陸した状態で、処理全体は、打ち上げ機を迅速に点検に戻すのを容易にするための付加的な段階を含むことができる。例えば、打ち上げ機は、打ち上げ地点へ戻る輸送時間を短縮するために、比較的低速で海上を航行するプラットフォームからより高速な水上艦に積み替えることができる。積み替えに加えて又はこの代わりに、再使用型打ち上げ機は、着陸地点から打ち上げ地点への輸送中に修復することができる。両方の特徴の態様を、海上で回収される打ち上げ機という関連で以下に更に説明する。他の実施形態では、これらの特徴の特定の態様(例えば、着陸地点からの途中で打ち上げ機を修復する)は、陸上の回収を含む他の回収構成に適用することができる。
【0035】
特定的な実施形態では、打ち上げ機(例えば、第1段の再使用可能ブースターシステム又はRBS)は、海上航行着陸プラットフォーム上への着陸後かつ処理職員が打ち上げ機に近づく前に、直ちに及び/又は自律で安全な状態に置かれる。自律の安全活動は、推進タンク及び圧力ボトルの排出及びあらゆる空力面の格納を含むことができる。打ち上げ機は、次に、沿岸の打ち上げ地点又は積み替え地点により早く戻るために別のより小型の船舶に積み替えることができる。別の実施形態では、打ち上げ機は、着陸用プラットフォームのデッキに固定することができ、プラットフォームは、沿岸の打ち上げ地点又は積み替え地点に曳航されるか又は自己の推進力の下で移動して戻ることができる。いずれの場合にも、打ち上げ機は、海上輸送のための垂直又は水平位置に関わらず、海上クレーン(又は他の適切な装置)によって移動して打ち上げ機を固定し、打ち上げ地点にある打ち上げ機処理施設に戻すためにドックで降ろしてトラックに載せることができる。
【0036】
途中の間及び打ち上げ機処理施設では、打ち上げ機は、次の打ち上げのために処理することができる。各打ち上げの前に通常行われる修復活動は、整備項目(ある場合)、洗浄、ガス圧ボトルの再充填、電池の再充電、必要に応じて断熱システム素材の修復、及び/又は空気圧、アビオニクス、及び水圧サブシステムの機能試験を含むことができる。途中の間及び打ち上げ機処理施設では、打ち上げ機は、ペイロード及びペイロードフェアリングと予め統合することが可能な使い捨て型上段と嵌合することができる。他の場合には、打ち上げ機は、ペイロードモジュールと直接に嵌合することができる。定期的に、エンジンの分解修理のような大規模点検も実施することができる。
【0037】
上述の処理活動中に、システム全体が単一の海上航行プラットフォームを含み、これを用いて打ち上げ機を沿岸の打ち上げ地点に輸送して戻す場合には、最初の打ち上げ機が打ち上げ地点に戻る輸送中に第2の打ち上げ機の着陸のために、打ち上げ機を降ろした後にプラットフォームを着陸区画に再び位置決めすることができる。システム全体が2つの海上航行プラットフォームを含む場合には、一方の海上航行プラットフォームが飛行と飛行の間に着陸区画に残り、他方のプラットフォームが沿岸に戻る。更に別の実施形態では、システムが2機の打ち上げ機と、1つの海上航行着陸プラットフォームと、打ち上げ機をプラットフォームから打ち上げ地点に輸送する別の船舶とを含み、この場合も、飛行と飛行の間に1つの着陸用プラットフォームが着陸区画に残ることができる。別の船舶は、特定的な実施形態では、海洋船舶又は空挺船を含むことができる。
【0038】
上述の実施形態のいずれにおいても、例えば、海洋環境で処理を確実に実行することができ、かつ後続処理と適正に順序付けられるという条件の下で、打ち上げ機の輸送中に修復処理のあらゆる適切な態様を実行することができる。
【0039】
本明細書では、例証目的のために本発明の具体的な実施形態を説明したが、本発明の様々な実施形態の精神及び範囲から逸脱することなく様々な修正を加えることができることは以上から認められるであろう。例えば、上記では海上に打ち上げ機を着陸させるという関連で本発明の開示の様々な実施形態を説明したが、他の実施形態では、例えば、湖、湾、大洋、海峡、又は場合によっては大きい川を含む他の水域上に打ち上げ機を着陸させるために上述のシステム及び方法を使用することができる。更に、上記では本発明の開示のある一定の実施形態に関連する様々な利点をこれらの実施形態の関連で説明したが、他の実施形態も、このような利点を示すことができ、本発明の範囲に収めるために全ての実施形態がこれらの利点を示すことは必ずしも必要ではない。従って、本発明は、添付の特許請求の範囲による以外は制限されない。
【符号の説明】
【0040】
100 打ち上げ機
110 ブースター段
112 船尾端部
114 前方端部
118a、118b 移動可能制御面
120 展開可能な空力面
【特許請求の範囲】
【請求項1】
宇宙打ち上げ機を運用する方法であって、
地球から宇宙打ち上げ機を打ち上げる段階と、
水域に着陸構造を位置決めする段階と、
前記水域の前記着陸構造上に前記宇宙打ち上げ機を着陸させる段階と、
を含むことを特徴とする方法。
【請求項2】
地球から前記宇宙打ち上げ機を打ち上げる段階は、陸上の打ち上げ地点から該宇宙打ち上げ機を打ち上げる段階を含むことを特徴とする請求項1に記載の方法。
【請求項3】
前記宇宙打ち上げ機を着陸させる段階は、前記水域の浮遊プラットフォーム上に該宇宙打ち上げ機を垂直に着陸させる段階を含むことを特徴とする請求項1に記載の方法。
【請求項4】
前記宇宙打ち上げ機を打ち上げる段階は、ブースター段上の1つ又はそれよりも多くのロケットエンジンを点火する段階を含み、
前記宇宙打ち上げ機を着陸させる段階は、前記水域の前記着陸構造上に前記ブースター段を垂直に着陸させる段階を含む、
ことを特徴とする請求項1に記載の方法。
【請求項5】
前記宇宙打ち上げ機を打ち上げる段階は、機首からの向きで該打ち上げ機を打ち上げる段階を含み、
方法が、打ち上げ後に前記宇宙打ち上げ機を船尾からの向きに方向転換する段階を更に含み、
前記宇宙打ち上げ機を着陸させる段階は、該宇宙打ち上げ機を前記船尾からの向きで前記着陸構造上に垂直に着陸させる段階を含む、
ことを特徴とする請求項1に記載の方法。
【請求項6】
前記宇宙打ち上げ機を打ち上げる段階は、機首からの向きで該打ち上げ機を打ち上げる段階を含み、
方法が、打ち上げ後に前記宇宙打ち上げ機を船尾からの向きに方向転換する段階を更に含み、
前記宇宙打ち上げ機を着陸させる段階は、船尾からの向きに1つ又はそれよりも多くの打ち上げ機エンジンから推進力を供給しながら、該宇宙打ち上げ機を該船尾からの向きで前記着陸構造上に垂直に着陸させる段階を含む、
ことを特徴とする請求項1に記載の方法。
【請求項7】
前記宇宙打ち上げ機の少なくとも一部分を再使用する段階を更に含むことを特徴とする請求項1に記載の方法。
【請求項8】
前記着陸構造上の前記宇宙打ち上げ機を修復施設に輸送する段階と、
前記修復施設で前記宇宙打ち上げ機の少なくとも一部分を修復する段階と、
修復後に前記宇宙打ち上げ機の少なくとも一部分を再使用する段階と、
を更に含むことを特徴とする請求項1に記載の方法。
【請求項9】
前記宇宙打ち上げ機の再使用可能な部分を前記着陸構造から輸送船舶に積み替える一方、該着陸構造は、前記水域に残って以降に打ち上げられる打ち上げ機を受け取る段階を更に含むことを特徴とする請求項1に記載の方法。
【請求項10】
前記宇宙打ち上げ機は、ブースター段に取り付けられた上段上に担持されたペイロードを含み、
前記宇宙打ち上げ機を地球から打ち上げる段階は、前記ブースター段上の1つ又はそれよりも多くのロケットエンジンを点火し、陸上の打ち上げ地点から機首からの向きで該宇宙打ち上げ機を打ち上げる段階を含み、
前記宇宙打ち上げ機を着陸させる段階は、前記水域の移動式着陸用プラットフォーム上に該宇宙打ち上げ機を着陸させる段階を含み、
方法が、
前記ブースター段上の前記1つ又はそれよりも多くのロケットエンジンを停止する段階と、
所定の高度で前記上段を前記ブースター段から分離する段階と、
前記ブースター段を船尾からの向きに方向転換する段階と、
前記着陸用プラットフォームから位置情報を受信し、該位置情報に基づいて前記船尾からの向きで該着陸用プラットフォームの方向に移動するように前記ブースター段の軌道を制御する段階と、
着陸の前に前記ブースター段上の前記1つ又はそれよりも多くのロケットエンジンを再点火する段階であって、前記宇宙打ち上げ機を着陸させる段階が、該再点火された1つ又はそれよりも多くのロケットエンジンから推進力を供給しながら該ブースター段を前記船尾からの向きで前記プラットフォーム上に垂直に着陸させる段階を含む前記段階と、
を更に含む、
ことを特徴とする請求項1に記載の方法。
【請求項11】
ペイロードを宇宙空間に運ぶ方法であって、
ロケットのブースター段にペイロードを結合する段階であって、該ブースター段が、船尾端部部分から離間した前方端部部分を有する前記段階と、
水域に浮遊プラットフォームを位置決めする段階と、
前記ブースター段の前記船尾端部部分の方向に位置決めされた1つ又はそれよりも多くのロケットエンジンを点火し、前記ロケットを機首からの向きで宇宙空間に向けて打ち上げる段階と、
前記ペイロードを前記ブースター段から分離する段階と、
分離後に、前記ブースター段を前記機首からの向きから船尾からの向きに方向転換する段階と、
前記ブースター段を前記船尾からの向きで前記浮遊プラットフォーム上に着陸させる段階と、
を含むことを特徴とする方法。
【請求項12】
前記ブースター段を前記機首からの向きから前記船尾からの向きに方向転換する前に、該ブースター段の前記船尾端部部分の方向に位置決めされた前記1つ又はそれよりも多くのロケットエンジンを停止する段階と、
前記ブースター段を方向転換した後に、該ブースター段の前記船尾端部部分の方向に位置決めされた前記1つ又はそれよりも多くのロケットエンジンを再点火して該ブースター段を減速させる段階であって、該ブースター段を着陸させる段階が、前記プラットフォーム上への該ブースター段の動力式垂直着陸を実行する段階を含む前記段階と、
を更に含むことを特徴とする請求項11に記載の方法。
【請求項13】
前記1つ又はそれよりも多くのロケットエンジンを停止して弾道軌道に従う段階と、
前記ブースター段から空力制御面を展開し、前記機首からの向きから船尾からの向きへの該ブースター段の方向転換を容易にする段階と、
を更に含むことを特徴とする請求項11に記載の方法。
【請求項14】
前記1つ又はそれよりも多くのロケットエンジンを停止して弾道軌道に従う段階と、
前記ブースター段の前記前方端部部分から1つ又はそれよりも多くのフレア制御面を展開し、前記機首からの向きから船尾からの向きへの該ブースター段の方向転換を容易にする段階と、
を更に含むことを特徴とする請求項11に記載の方法。
【請求項15】
前記1つ又はそれよりも多くのロケットエンジンを停止する段階と、
前記ブースター段上に取り付けられた1つ又はそれよりも多くの推進スラスタを作動させて、前記機首からの向きから船尾からの向きへの該ブースター段の方向転換を容易にする段階と、
を更に含むことを特徴とする請求項11に記載の方法。
【請求項16】
前記ペイロードを前記ブースター段から分離した後に前記1つ又はそれよりも多くのロケットエンジンを停止する段階と、
前記ブースター段上の空力制御面を移動し、前記プラットフォームから受信したプラットフォーム位置情報に基づいて該プラットフォームに向かう該ブースター段の飛行経路を少なくとも部分的に制御する段階と、
前記ブースター段上の前記空力制御面を移動し、該ブースター段を前記機首からの向きから船尾からの向きに少なくとも部分的に方向転換する段階と、
前記ブースター段を方向転換した後に、該ブースター段の前記船尾端部部分の方向に位置決めされた前記1つ又はそれよりも多くのロケットエンジンを再点火する段階であって、該ブースター段を着陸させる段階が、前記プラットフォーム上への該ブースター段の動力式垂直着陸を実行する段階を含む前記段階と、
を更に含むことを特徴とする請求項11に記載の方法。
【請求項17】
宇宙空間へのアクセスを提供するためのシステムであって、
宇宙打ち上げ機と、
打ち上げ地点と、
前記打ち上げ地点から前記打ち上げ機を最初に打ち上げるための手段と、
前記打ち上げ機の少なくとも一部分を水域の構造上に着陸させるための手段と、
前記打ち上げ地点から前記打ち上げ機の少なくとも一部分を2回目に打ち上げるための手段と、
を含むことを特徴とするシステム。
【請求項18】
前記着陸させるための手段は、前記宇宙打ち上げ機の少なくとも一部分を浮遊プラットフォーム上に垂直に着陸させるための手段を含むことを特徴とする請求項17に記載のシステム。
【請求項19】
前記打ち上げるための手段は、機首からの向きで前記打ち上げ機を打ち上げるための手段を含み、
システムが、着陸前に前記打ち上げ機を前記機首からの向きから船尾からの向きに方向転換するための手段を更に含み、
前記着陸させるための手段は、前記船尾からの向きで着陸させるための手段を含む、
ことを特徴とする請求項17に記載のシステム。
【請求項20】
前記宇宙打ち上げ機は、1つ又はそれよりも多くのロケットエンジンを含み、
前記打ち上げるための手段は、前記ロケットエンジンを点火して前記打ち上げ機を機首からの向きで打ち上げるための手段を含み、
システムが、
前記ロケットエンジンを停止するための手段と、
着陸前に前記打ち上げ機を前記機首からの向きから船尾からの向きに方向転換するための手段と、
前記打ち上げ機が前記船尾からの向きにある時に前記ロケットエンジンの1つ又はそれよりも多くを再点火して該打ち上げ機を減速させるための手段であって、前記着陸させるための手段が、該1つ又はそれよりも多くのロケットエンジンが推進しながら該船尾からの向きで着陸させるための手段を含む前記手段と、
を更に含む、
ことを特徴とする請求項19に記載のシステム。
【請求項1】
宇宙打ち上げ機を運用する方法であって、
地球から宇宙打ち上げ機を打ち上げる段階と、
水域に着陸構造を位置決めする段階と、
前記水域の前記着陸構造上に前記宇宙打ち上げ機を着陸させる段階と、
を含むことを特徴とする方法。
【請求項2】
地球から前記宇宙打ち上げ機を打ち上げる段階は、陸上の打ち上げ地点から該宇宙打ち上げ機を打ち上げる段階を含むことを特徴とする請求項1に記載の方法。
【請求項3】
前記宇宙打ち上げ機を着陸させる段階は、前記水域の浮遊プラットフォーム上に該宇宙打ち上げ機を垂直に着陸させる段階を含むことを特徴とする請求項1に記載の方法。
【請求項4】
前記宇宙打ち上げ機を打ち上げる段階は、ブースター段上の1つ又はそれよりも多くのロケットエンジンを点火する段階を含み、
前記宇宙打ち上げ機を着陸させる段階は、前記水域の前記着陸構造上に前記ブースター段を垂直に着陸させる段階を含む、
ことを特徴とする請求項1に記載の方法。
【請求項5】
前記宇宙打ち上げ機を打ち上げる段階は、機首からの向きで該打ち上げ機を打ち上げる段階を含み、
方法が、打ち上げ後に前記宇宙打ち上げ機を船尾からの向きに方向転換する段階を更に含み、
前記宇宙打ち上げ機を着陸させる段階は、該宇宙打ち上げ機を前記船尾からの向きで前記着陸構造上に垂直に着陸させる段階を含む、
ことを特徴とする請求項1に記載の方法。
【請求項6】
前記宇宙打ち上げ機を打ち上げる段階は、機首からの向きで該打ち上げ機を打ち上げる段階を含み、
方法が、打ち上げ後に前記宇宙打ち上げ機を船尾からの向きに方向転換する段階を更に含み、
前記宇宙打ち上げ機を着陸させる段階は、船尾からの向きに1つ又はそれよりも多くの打ち上げ機エンジンから推進力を供給しながら、該宇宙打ち上げ機を該船尾からの向きで前記着陸構造上に垂直に着陸させる段階を含む、
ことを特徴とする請求項1に記載の方法。
【請求項7】
前記宇宙打ち上げ機の少なくとも一部分を再使用する段階を更に含むことを特徴とする請求項1に記載の方法。
【請求項8】
前記着陸構造上の前記宇宙打ち上げ機を修復施設に輸送する段階と、
前記修復施設で前記宇宙打ち上げ機の少なくとも一部分を修復する段階と、
修復後に前記宇宙打ち上げ機の少なくとも一部分を再使用する段階と、
を更に含むことを特徴とする請求項1に記載の方法。
【請求項9】
前記宇宙打ち上げ機の再使用可能な部分を前記着陸構造から輸送船舶に積み替える一方、該着陸構造は、前記水域に残って以降に打ち上げられる打ち上げ機を受け取る段階を更に含むことを特徴とする請求項1に記載の方法。
【請求項10】
前記宇宙打ち上げ機は、ブースター段に取り付けられた上段上に担持されたペイロードを含み、
前記宇宙打ち上げ機を地球から打ち上げる段階は、前記ブースター段上の1つ又はそれよりも多くのロケットエンジンを点火し、陸上の打ち上げ地点から機首からの向きで該宇宙打ち上げ機を打ち上げる段階を含み、
前記宇宙打ち上げ機を着陸させる段階は、前記水域の移動式着陸用プラットフォーム上に該宇宙打ち上げ機を着陸させる段階を含み、
方法が、
前記ブースター段上の前記1つ又はそれよりも多くのロケットエンジンを停止する段階と、
所定の高度で前記上段を前記ブースター段から分離する段階と、
前記ブースター段を船尾からの向きに方向転換する段階と、
前記着陸用プラットフォームから位置情報を受信し、該位置情報に基づいて前記船尾からの向きで該着陸用プラットフォームの方向に移動するように前記ブースター段の軌道を制御する段階と、
着陸の前に前記ブースター段上の前記1つ又はそれよりも多くのロケットエンジンを再点火する段階であって、前記宇宙打ち上げ機を着陸させる段階が、該再点火された1つ又はそれよりも多くのロケットエンジンから推進力を供給しながら該ブースター段を前記船尾からの向きで前記プラットフォーム上に垂直に着陸させる段階を含む前記段階と、
を更に含む、
ことを特徴とする請求項1に記載の方法。
【請求項11】
ペイロードを宇宙空間に運ぶ方法であって、
ロケットのブースター段にペイロードを結合する段階であって、該ブースター段が、船尾端部部分から離間した前方端部部分を有する前記段階と、
水域に浮遊プラットフォームを位置決めする段階と、
前記ブースター段の前記船尾端部部分の方向に位置決めされた1つ又はそれよりも多くのロケットエンジンを点火し、前記ロケットを機首からの向きで宇宙空間に向けて打ち上げる段階と、
前記ペイロードを前記ブースター段から分離する段階と、
分離後に、前記ブースター段を前記機首からの向きから船尾からの向きに方向転換する段階と、
前記ブースター段を前記船尾からの向きで前記浮遊プラットフォーム上に着陸させる段階と、
を含むことを特徴とする方法。
【請求項12】
前記ブースター段を前記機首からの向きから前記船尾からの向きに方向転換する前に、該ブースター段の前記船尾端部部分の方向に位置決めされた前記1つ又はそれよりも多くのロケットエンジンを停止する段階と、
前記ブースター段を方向転換した後に、該ブースター段の前記船尾端部部分の方向に位置決めされた前記1つ又はそれよりも多くのロケットエンジンを再点火して該ブースター段を減速させる段階であって、該ブースター段を着陸させる段階が、前記プラットフォーム上への該ブースター段の動力式垂直着陸を実行する段階を含む前記段階と、
を更に含むことを特徴とする請求項11に記載の方法。
【請求項13】
前記1つ又はそれよりも多くのロケットエンジンを停止して弾道軌道に従う段階と、
前記ブースター段から空力制御面を展開し、前記機首からの向きから船尾からの向きへの該ブースター段の方向転換を容易にする段階と、
を更に含むことを特徴とする請求項11に記載の方法。
【請求項14】
前記1つ又はそれよりも多くのロケットエンジンを停止して弾道軌道に従う段階と、
前記ブースター段の前記前方端部部分から1つ又はそれよりも多くのフレア制御面を展開し、前記機首からの向きから船尾からの向きへの該ブースター段の方向転換を容易にする段階と、
を更に含むことを特徴とする請求項11に記載の方法。
【請求項15】
前記1つ又はそれよりも多くのロケットエンジンを停止する段階と、
前記ブースター段上に取り付けられた1つ又はそれよりも多くの推進スラスタを作動させて、前記機首からの向きから船尾からの向きへの該ブースター段の方向転換を容易にする段階と、
を更に含むことを特徴とする請求項11に記載の方法。
【請求項16】
前記ペイロードを前記ブースター段から分離した後に前記1つ又はそれよりも多くのロケットエンジンを停止する段階と、
前記ブースター段上の空力制御面を移動し、前記プラットフォームから受信したプラットフォーム位置情報に基づいて該プラットフォームに向かう該ブースター段の飛行経路を少なくとも部分的に制御する段階と、
前記ブースター段上の前記空力制御面を移動し、該ブースター段を前記機首からの向きから船尾からの向きに少なくとも部分的に方向転換する段階と、
前記ブースター段を方向転換した後に、該ブースター段の前記船尾端部部分の方向に位置決めされた前記1つ又はそれよりも多くのロケットエンジンを再点火する段階であって、該ブースター段を着陸させる段階が、前記プラットフォーム上への該ブースター段の動力式垂直着陸を実行する段階を含む前記段階と、
を更に含むことを特徴とする請求項11に記載の方法。
【請求項17】
宇宙空間へのアクセスを提供するためのシステムであって、
宇宙打ち上げ機と、
打ち上げ地点と、
前記打ち上げ地点から前記打ち上げ機を最初に打ち上げるための手段と、
前記打ち上げ機の少なくとも一部分を水域の構造上に着陸させるための手段と、
前記打ち上げ地点から前記打ち上げ機の少なくとも一部分を2回目に打ち上げるための手段と、
を含むことを特徴とするシステム。
【請求項18】
前記着陸させるための手段は、前記宇宙打ち上げ機の少なくとも一部分を浮遊プラットフォーム上に垂直に着陸させるための手段を含むことを特徴とする請求項17に記載のシステム。
【請求項19】
前記打ち上げるための手段は、機首からの向きで前記打ち上げ機を打ち上げるための手段を含み、
システムが、着陸前に前記打ち上げ機を前記機首からの向きから船尾からの向きに方向転換するための手段を更に含み、
前記着陸させるための手段は、前記船尾からの向きで着陸させるための手段を含む、
ことを特徴とする請求項17に記載のシステム。
【請求項20】
前記宇宙打ち上げ機は、1つ又はそれよりも多くのロケットエンジンを含み、
前記打ち上げるための手段は、前記ロケットエンジンを点火して前記打ち上げ機を機首からの向きで打ち上げるための手段を含み、
システムが、
前記ロケットエンジンを停止するための手段と、
着陸前に前記打ち上げ機を前記機首からの向きから船尾からの向きに方向転換するための手段と、
前記打ち上げ機が前記船尾からの向きにある時に前記ロケットエンジンの1つ又はそれよりも多くを再点火して該打ち上げ機を減速させるための手段であって、前記着陸させるための手段が、該1つ又はそれよりも多くのロケットエンジンが推進しながら該船尾からの向きで着陸させるための手段を含む前記手段と、
を更に含む、
ことを特徴とする請求項19に記載のシステム。
【図1】


【図2】

【図2】
【公表番号】特表2012−530020(P2012−530020A)
【公表日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願番号】特願2012−516176(P2012−516176)
【出願日】平成22年6月14日(2010.6.14)
【国際出願番号】PCT/US2010/038553
【国際公開番号】WO2011/005422
【国際公開日】平成23年1月13日(2011.1.13)
【出願人】(511206467)ブルー オリジン エルエルシー (2)
【公表日】平成24年11月29日(2012.11.29)
【国際特許分類】
【出願日】平成22年6月14日(2010.6.14)
【国際出願番号】PCT/US2010/038553
【国際公開番号】WO2011/005422
【国際公開日】平成23年1月13日(2011.1.13)
【出願人】(511206467)ブルー オリジン エルエルシー (2)
[ Back to top ]