
宇宙探査機開発テストベッドシステム
【課題】位置特定照合システム及び制御モジュールを含む方法と装置を提供する。
【解決手段】位置特定照合システムは、ある環境で任意の数のモバイルプラットフォーム106についての位置特定情報を生成する。制御モジュール108は、位置特定照合システムから、任意の数のモバイルプラットフォームについての位置特定情報を受信する。制御モジュールは、位置特定情報を使用し、任意の数のモバイルプラットフォームのための指令信号をさらに生成する。制御モジュールは、指令信号を任意の数のモバイルプラットフォームに送信し、任意の数のモバイルプラットフォームの操作が非地球上の陸上環境で任意の数の宇宙探査機システム101の操作をエミュレートするように、その環境で任意の数のモバイルプラットフォームを操作する。
【解決手段】位置特定照合システムは、ある環境で任意の数のモバイルプラットフォーム106についての位置特定情報を生成する。制御モジュール108は、位置特定照合システムから、任意の数のモバイルプラットフォームについての位置特定情報を受信する。制御モジュールは、位置特定情報を使用し、任意の数のモバイルプラットフォームのための指令信号をさらに生成する。制御モジュールは、指令信号を任意の数のモバイルプラットフォームに送信し、任意の数のモバイルプラットフォームの操作が非地球上の陸上環境で任意の数の宇宙探査機システム101の操作をエミュレートするように、その環境で任意の数のモバイルプラットフォームを操作する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の開示は、概して車両の開発及び検査、特に、宇宙探査機システムの開発及び検査に関する。
【背景技術】
【0002】
航空車両、水上(水中)車両、及び陸上車両などの車両の開発及び検査の現在利用できる方法は、通常、コンピュータシミュレーションを行うこと及び試作品を検査することを含む。しかしながら、コンピュータシミュレーションを行うことは、要求される以上に時間を浪費するかもしれない。さらに、コンピュータシミュレーションは、検査対象である実際のシステムの多くの複雑さを単純化してしまうかもしれない。
【0003】
同様に、試作品の検査は、要求される以上に費用がかかるかもしれない。たとえば、試作車は、操作コスト、物流問題、安全規定、飛行規定、及び/またはその他の要因により、限定的な任意の時間数及び限定された任意の状況においてのみ飛行することができる。
【0004】
現在利用できる方法と比較して、車両がより早く正確に移動できるようなアルゴリズム及び構造の開発及び検査を可能にするシステムが望まれる。さらにまた、現在利用できる方法と比較して、車両のアルゴリズム及び構造の開発及び検査の費用を削減するシステムが望まれる。
【0005】
それゆえに、起こりうるその他の問題だけではなく、上述した問題の少なくとも何点かを考慮する方法と装置を有することが有利となるだろう。
【発明の概要】
【課題を解決するための手段】
【0006】
一つの好適な実施形態では、装置は、位置特定照合システムと制御モジュールを備える。位置特定照合システムは、ある環境で任意の数のモバイルプラットフォームについての位置特定情報を生成する。制御モジュールは、位置特定照合システムから、任意の数のモバイルプラットフォームについての位置特定情報を受信する。制御モジュールは、位置特定情報を使用し、任意の数のモバイルプラットフォームのための指令信号をさらに生成する。制御モジュールは、さらに、任意の数のモバイルプラットフォームに指令信号を送信し、任意の数のモバイルプラットフォームの操作が任意の数の宇宙探査機システムの操作をエミュレートするように、その環境で任意の数のモバイルプラットフォームを操作する。
【0007】
別の好適な実施形態では、任意の数の宇宙探査機システムを開発及び検査するシステムは、任意の数のモバイルプラットフォームと、位置特定照合システムと、正常性監視モジュールと、制御モジュールと、データ管理モジュールとを備える。任意の数のモバイルプラットフォームは、ある環境の中で作動し、非地球上の陸上環境で任意の数の宇宙探査機システムの操作をエミュレートする。位置特定照合システムは、ある環境で任意の数のモバイルプラットフォームについての位置特定情報を生成する。正常性監視モジュールは、任意の数のモバイルプラットフォームから正常性監視情報を受信し、受信した正常性監視情報を使用して任意の数のモバイルプラットフォームについての正常性状態を監視する。制御モジュールは、位置特定照合システムから、任意の数のモバイルプラットフォームについての位置特定情報を受信する。制御モジュールは、任意の数のモバイルプラットフォームについての位置特定情報と正常性状態を使用し、任意の数のモバイルプラットフォームのための指令信号をさらに生成する。制御モジュールは、さらに、任意の数のモバイルプラットフォームに指令信号を送信し、任意の数のモバイルプラットフォームの操作が非地球上の陸上環境で任意の数の宇宙探査機システムの操作をエミュレートするように、環境内で任意の数のモバイルプラットフォームを操作する。データ管理モジュールは、その環境で任意の数のモバイルプラットフォームについての位置特定情報を記録する。
【0008】
さらに別の好適な実施形態では、任意の数の宇宙探査機システムを検査する方法が提供される。ある環境で任意の数のモバイルプラットフォームについての位置特定情報が受信される。位置特定情報は、位置特定照合システムを使用し生成される。任意の数のモバイルプラットフォームのための指令信号は、位置特定情報を使用し生成される。指令信号は、任意の数のモバイルプラットフォームに送信され、任意の数のモバイルプラットフォームの操作が任意の数の宇宙探査機システムの操作をエミュレートするように、環境内で任意の数のモバイルプラットフォームを操作する。
【0009】
特徴、機能および利点は、本開示のさまざまな実施形態において独立して達成可能であり、または、以下の説明および図面を参照し、さらに詳細が理解可能である他の実施形態において組み合わせることができる。
【図面の簡単な説明】
【0010】
好適な実施形態の特徴と考えられる新しい特徴が、添付した特許請求の範囲で説明される。しかしながら、添付の図面とともに以下につづく発明の詳細な説明を参照することにより、好ましい使用形態、目的、及びその利点と同様に、好適な実施形態が最もよく理解できるであろう。
【0011】
【図1】好適な実施形態による宇宙探査機システムの開発及び検査システムのブロック図を示す。
【図2】好適な実施形態によるロボット車両を図示する。
【図3】好適な実施形態によるある環境での任意の数のモバイルプラットフォームを図示する。
【図4】好適な実施形態による検査システムを図示する。
【図5】好適な実施形態による検査システムを図示する。
【図6】好適な実施形態による宇宙探査機システムの開発及び検査工程のフローチャートを示す。
【図7】好適な実施形態による宇宙での宇宙探査機システムの操作をエミュレートする工程のフローチャートを示す。
【図8】好適な実施形態によるデータ処理システムを図示する。
【発明を実施するための形態】
【0012】
別の好適な実施形態は、一または複数の異なる検討を認識し、且つ考慮する。たとえば、別の好適な実施形態は、宇宙車両を検査するシステムが、航空車両、水上(水中)車両、及び/または陸上車両と比較して、異なる要因を考慮する必要があるという点を認識し、且つ考慮する。
【0013】
別の好適な実施形態は、たとえば、大気圏外、微小重力状態、及び地球の大気圏外のその他の環境などの、環境で作動する車両は、空中、水中、及び/または陸上で作動する車両とは異なる状態で作動するということを認識し、且つ考慮する。地球の大気圏と大気圏外との境界の定義は、カーマン・ラインである。カーマン・ラインとは、地球の海抜およそ100キロメートルの高度の境界線である。
【0014】
他の好適な実施形態は、たとえば、地球の大気圏外の環境のような、環境で作動する車両を検査するときに、その環境の状態に配慮しなければならないことを認識し、且つ考慮する。宇宙環境及び効果とは、たとえば、限定はしないが、重力状態、原子状酸素、太陽電磁効果、イオン化放射線、隕石及び軌道の残屑、宇宙探査機関連の汚れ、及び/またはその他の環境の状態を含む。
【0015】
地球の大気圏外の環境で作動する車両の一つの例は、宇宙探査機である。別の好適な実施形態は、宇宙探査機が作動する環境の状態は宇宙探査機に搭載された様々なシステムの操作に影響することを認識し、且つ考慮する。その結果、別の好適な実施形態は、宇宙探査機及び/または宇宙探査機のシステムを検査するときに、これらの状態に配慮しなければならないことを認識し、且つ考慮する。
【0016】
別の好適な実施形態は、宇宙探査機及び/または宇宙探査機に搭載されたシステムを検査するための現在利用できる方法は、宇宙探査機を宇宙に打ち上げる必要があるということを認識し、且つ考慮する。次いで、宇宙探査機が地球の周りの軌道上にある間に、検査が実行される。この種の検査は、軌道上検査と呼ばれる。
【0017】
別の好適な実施形態は、宇宙探査機の宇宙への打ち上げは、要求される以上に時間と労力がかかることを認識し、且つ考慮する。たとえば、打ち上げは必ずしも計画通りに進むわけではなく、一または複数回の予定変更を要するかも知れない。さらに、打ち上げは、毎回の打ち上げ前と、打ち上げ中と、打ち上げ後とに正しい安全規制に従っていることを確実にするために、要求される以上に多くの時間及び/または労力を必要とする。別の好適な実施形態は、宇宙へ宇宙探査機を打ち上げることは、要求される以上に費用がかかることを認識し、且つ考慮する。
【0018】
加えて、別の好適な実施形態は、宇宙探査機がいったん宇宙へ打ち上げられると、宇宙探査機の検査を実行することが要求される以上に難しいということを認識し、且つ考慮する。たとえば、検査で使用するための宇宙探査機に搭載されたシステムにより生成されたデータを回収することは、要求される以上に難しく、また要求される以上に時間がかかる。さらに、宇宙探査機がいったん宇宙へ打ち上げられてしまうと、物理的に、宇宙車両を回収し地上で追加検査を実行することは、要求される以上に難しい。
【0019】
別の好適な実施形態は、陸上で宇宙探査機を検査するための現在利用できるソリューションが構台ベース及び/またはトラックベースの検査施設を使用することを認識し、且つ考慮する。別の好適な実施形態は、これらの種類の施設により、限定された数の車両が任意の時点で検査されることを認識し、且つ考慮する。
【0020】
また、別の好適な実施形態は、検査が実行される異なる種類の宇宙探査機が、要求される以上に大きく及び/またはより複雑な物的なインフラを備える施設を必要とすることを認識し、且つ考慮する。別の好適な実施形態は、他の種類のプラットフォームを使用し、宇宙で行われる宇宙探査機の操作を検査することが、検査のために必要とされる物的なインフラのサイズを小さくするということを認識し、且つ考慮する。
【0021】
たとえば、宇宙での宇宙探査機の移動をエミュレートする方法で、検査環境内で移動できるモバイルプラットフォームを使用することにより、宇宙探査機が宇宙に打ち上げられる必要のない、及び/または宇宙車両を取り囲むことができるほど大きい検査施設を要求する宇宙探査機の検査が可能になる。さらに、別の好適な実施形態は、宇宙探査機を検査することと比較して宇宙探査機の任意の数のシステムを検査することは、検査に必要な時間及び/または資源も削減することを認識し、且つ考慮する。
【0022】
それゆえ、別の好適な実施形態は、ある環境で作動する任意の数のモバイルプラットフォームを使用し、宇宙探査機及び/または宇宙探査機のシステムを検査するための方法と装置を提供する。一つの好適な実施形態では、装置は、位置特定照合システム及び制御モジュールを備える。位置特定照合システムは、ある環境で任意の数のモバイルプラットフォームについての位置特定情報を生成する。制御モジュールは、位置特定照合システムから、任意の数のモバイルプラットフォームについての位置特定情報を受信する。制御モジュールは、位置特定情報を使用し、任意の数のモバイルプラットフォームのための指令信号をさらに生成する。制御モジュールは、さらに、指令信号を任意の数のモバイルプラットフォームに送信し、任意の数のモバイルプラットフォームの操作が任意の数の宇宙探査機システムの操作をエミュレートするように、その環境で任意の数のモバイルプラットフォームを操作する。
【実施例】
【0023】
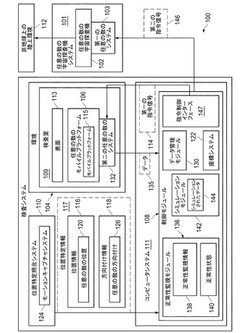
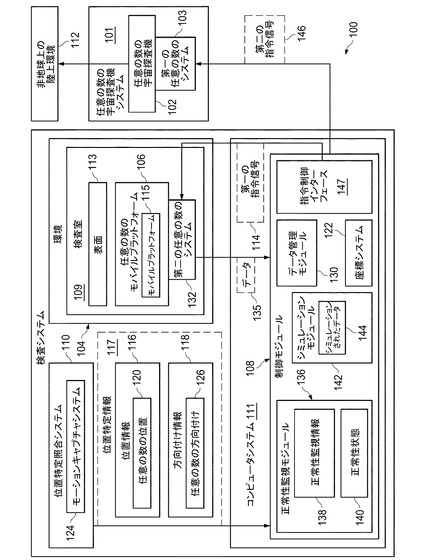
図1には、好適な実施形態による宇宙探査機システムの開発及び検査システムのブロック図が示される。これらの実施例おいて、検査システム100は、任意の数の宇宙探査機システム101の開発及び検査に使用することができる。ここで使用されているように、任意の数のアイテムは、一または複数のアイテムを意味する。この方法で、任意の数の宇宙探査機システム101は、一または複数の宇宙探査機を意味する。
【0024】
実施例においては、任意の数の宇宙探査機システム101が、任意の数の宇宙探査機102、任意の数の宇宙探査機102の第一の任意の数のシステム103、またはそれらの組み合わせを備えるものもある。任意の数の宇宙探査機102の一は、地球大気圏外で走行及び/または作動するどのような車両または機械でもよい。たとえば、任意の数の宇宙探査機102は、非地球上の陸上環境112で移動及び/または作動する。
【0025】
これらの実施例において、非地球上の陸上環境112は、地球上の陸上環境でないどんな環境でもよい。地球上の陸上環境とは、地球の構造核、マントル、表面、大気及び水圏のうちの少なくとも一を含むものと定義する。たとえば、非地球上の陸上環境112は、宇宙空間、別の惑星の大気圏及び/または表面、月、小惑星、彗星、及び/または別の環境を含む。非地球上の陸上環境112に適する環境とは、地球上、地球の水域、または地球の大気圏でない環境である。
【0026】
この中で使用されるように、多くのアイテムとともに使用される場合の“〜のうちの少なくとも一”という表現は、一または複数の列挙されたアイテムの一または複数の異なる組み合わせが使用されてもよく、且つ、列挙された中の各々のアイテムの一だけが必要とされてもよいということを意味する。“アイテムA、アイテムB、及びアイテムCのうちの少なくとも一”とは、たとえば、限定はしないが、アイテムAまたはアイテムA及びアイテムBを含むことができる。この例は、アイテムA、アイテムB、及びアイテムC、またはアイテムB及びアイテムCも含むことができる。他の例では、“〜のうちの少なくとも一”は、たとえば、限定はしないが、二のアイテムA、一のアイテムB、及び十のアイテムCとしてもよく、四のアイテムB及び七のアイテムCとしてもよく、且つ他の適する組み合わせとしてもよい。
【0027】
これらの実施例において、非地球上の陸上環境112での操作とは、たとえば、非地球上の陸上環境112内へ、非地球上の陸上環境112から、及び非地球上の陸上環境112を介して走行することのうちの少なくとも一を含む。任意の数の宇宙探査機102の中の宇宙探査機は、宇宙車両、惑星ローバー、衛星、スペースシャトル、惑星着陸車両、軌道宇宙探査機、地球周回軌道宇宙探査機、有人宇宙探査機、無人宇宙探査機、宇宙ステーション、ロケット、宇宙ミサイル、宇宙探測機、宇宙ロボット、及び/または他の適する種類の宇宙探査機の一から選択される。
【0028】
さらに、任意の数の宇宙探査機102の第一の任意の数のシステム103は、任意の数の宇宙探査機102に関連付けられる。この関連付けは、これらの実施例において物理的な関連付けである。別の適する方法において、たとえば第一の任意の数のシステム103の一など、第一の構成要素は、固定され、接着され、取り付けられ、溶接され、留められ、及び/または接続されることにより、たとえば任意の数の宇宙探査機102の一など、第二の構成要素に関連付けられると考えられる。第一の構成要素は、第三の構成要素を使用し、第二の構成要素に接続してもよい。第一の構成要素は、第二の構成要素の一部及び/または延長として形成されることにより、第二の構成要素と関連付けられることも考えられる。
【0029】
これらの実施例において、任意の数の宇宙探査機102の第一の任意の数のシステム103は、センサシステム、位置確認システム、カメラシステム、推進システム、スラスタシステム、ドッキングシステム、着陸システム、移動システム、制御システム、環境システム、断熱システム、放射線防護システム、電力システム、通信システム、または宇宙探査機における別の適する種類のシステムのうちの少なくとも一を含む。
【0030】
これらの実施例において、検査システム100は、環境104、任意の数のモバイルプラットフォーム106、制御モジュール108、及び位置特定照合システム110を備える。環境104は、任意の数のモバイルプラットフォーム106が操作され、非地球上の陸上環境112で任意の数の宇宙探査機システム101の操作をエミュレートするどのような環境でもよい。さらに、環境104は、非地球上の陸上環境112の一または複数の状態をシミュレートする環境も含む。
【0031】
たとえば、環境104は、囲まれた検査環境、実験室、検査施設、低重力模擬環境、または別の適する種類の環境とすることができる。一つの実施例において、環境104は検査室109の形式を取ることができる。検査室109は、非地球上の陸上環境112の一または複数の状態をシミュレーションする。たとえば、限定はしないが、検査室109は、低重力状態、真空空間、極端な温度状態、極端な放射能状態、及び/またはその他の種類の状態をシミュレーションする。
【0032】
任意の数の宇宙探査機システム101が、任意の数の宇宙探査機102に関連付けられた第一の任意の数のシステム103を備えるときに、任意の数の宇宙探査機102が非地球上の陸上環境112内で移動する間に、第一の任意の数のシステム103は非地球上の陸上環境112を移動する。さらに、第一の任意の数のシステム103は、任意の数の宇宙探査機102とは独立して、非地球上の陸上環境112を移動してもよい。
【0033】
任意の数のモバイルプラットフォーム106を使用し、非地球上の陸上環境112で任意の数の宇宙探査機システム101の操作をエミュレートすることは、任意の数の宇宙探査機システム101が非地球上の陸上環境112内で作動する方法と同様の方法で、環境104内で任意の数のモバイルプラットフォーム106を操作することを含む。たとえばモバイルプラットフォーム115など、任意の数のモバイルプラットフォーム106のうちの一を操作することは、モバイルプラットフォームを移動すること、停止すること、減速すること、加速すること、休止すること、その構造を移動すること、操作を実行させること、その構造に操作を実行させること、及びその他の種類の操作を実行することのうちの少なくとも一を含む。
【0034】
この実施例において、非地球上の陸上環境112での状態は地球上の陸上環境での状態と同じではないので、非地球上の陸上環境112で任意の数の宇宙探査機システム101の操作をエミュレートする。例えば、地球上の陸上環境と異なる非地球上の陸上環境112の状態とは、重力状態、大気状態、気象状況、放射能状態、電磁気の状態、太陽圧、太陽束、太陽光、及び/またはその他の適する状態を含む。
【0035】
例えば、任意の数の宇宙探査機システム101が非地球上の陸上環境112にある場合に任意の数の宇宙探査機システム101が作動する方法で、任意の数のモバイルプラットフォーム106は環境104で作動する。要するに、任意の数のモバイルプラットフォームを操作するときには、異なる大気、重力、及び環境104とは異なる他のパラメータが考慮される。たとえば、もし任意の数の宇宙探査機システム101の一がゼロ重力環境で選択された量のスラストを適用すれば、宇宙探査機システムの任意の数のモバイルプラットフォーム106の一のモバイルプラットフォーム115は、宇宙探査機がゼロ重力環境で移動するのと同じスピードと方向で環境104を移動する。
【0036】
実施例の中には、任意の数のモバイルプラットフォーム106が環境104の表面113に移動するものもある。表面113は、これらの例において、平らなまたは平らではない表面とすることができる。例えば、場合によっては、表面113は、地球以外の惑星上の地形を表す。他の実施例において、任意の数のモバイルプラットフォーム106は、空中、水上、水面下、及び/または環境104の別の適する方法で移動する。
【0037】
さらに、これらの実施例では、モバイルプラットフォーム115は、任意の数のモバイルプラットフォーム106の一の例である。モバイルプラットフォーム115は、環境104内で移動するどんな種類のプラットフォームでもよい。例えば、任意の数のモバイルプラットフォーム106の一は、車両、陸上車両、航空車両、宇宙車両、ロボット、ロボットアーム、機械、移動構造、宇宙ロボット、宇宙服、宇宙プラットフォーム、宇宙組立品、宇宙ステーション、惑星着陸車両、宇宙装置、及びその他の適する種類のプラットフォームの一から選択される。
【0038】
たとえば、モバイルプラットフォーム115は、非地球上の陸上環境112で使用するための、検査対象である任意の数の宇宙探査機102の一とする。また、モバイルプラットフォーム115は、検査対象である任意の数の宇宙探査機102の一及び/または第一の任意の数のシステム103の一を保持する車両とする例もある。たとえば、モバイルプラットフォーム115は、非地球上の陸上環境112で任意の数の宇宙探査機102の一または複数を使用するための、検査対象である第一の任意の数のシステム103の一を保持する。
【0039】
これらの実施例において、制御モジュール108は、環境104内で任意の数のモバイルプラットフォーム106の移動を制御する。制御モジュール108は、ハードウエア、ソフトウエア、またはその二つの組み合わせを使用し、実行される。たとえば、制御モジュール108は、コンピュータシステム111で実施される。
【0040】
コンピュータシステム111は、複数のコンピュータを備える。複数のコンピュータが存在すると、これらのコンピュータは互いに通信し合う。さらに、これらのコンピュータの一部は、環境104内に位置付けられている一方で、これらのコンピュータの別の部分は、環境104の外部に位置付けられる。この中で使用されるように、たとえばコンピュータの一部など、アイテムの一部とは、アイテムが零、一、いくつか、またはすべてのアイテムとすることができる。言い換えれば、コンピュータの一部とは、コンピュータが零、一、いくつか、またはすべてのコンピュータとすることができる。
【0041】
さらに、これらの実施例において、制御モジュール108の少なくとも一部は、環境104に、環境104から離れた場所に、及び/または任意の数のモバイルプラットフォーム106に位置付けられる。一つの実施例として、制御モジュール108のすべてが環境104から離れた場所に位置付けられる。別の実施例として、制御モジュール108の一部は、任意の数のモバイルプラットフォーム106の一または複数に位置付けられる。
【0042】
制御モジュール108が任意の数のモバイルプラットフォーム106から離れた場所に位置付けられるときに、制御モジュール108は、任意の数の通信リンクを使用し、任意の数のモバイルプラットフォーム106と通信する。これらの実施例において、通信リンクは、たとえば、無線通信リンク、有線通信リンク、光通信リンク、及び/または他の適する種類の通信リンクの一から選択される。
【0043】
これらの実施例において、任意の数のモバイルプラットフォーム106の移動が非地球上の陸上環境112の任意の数の宇宙探査機システム101の移動をエミュレートするように、制御モジュール108は、任意の数のモバイルプラットフォーム106を移動させる。たとえば、制御モジュール108は、任意の数のモバイルプラットフォーム106に第一の指令信号114を送信し、非地球上の陸上環境112で移動する任意の数の宇宙探査機システム101をエミュレートする方法で、任意の数のモバイルプラットフォーム106を移動させる。
【0044】
これらの実施例において、任意の数のモバイルプラットフォーム106は、自由度6で環境104を移動する。しかしながら、他の実施例において、任意の数のモバイルプラットフォーム106は、たとえば、自由度5または自由度4など、ほとんど自由度がない状態で移動する。たとえば、任意の数のモバイルプラットフォーム106の一は、x方向及びy方向の面にそって移動し、且つ、x軸、y軸、及びz軸の周りを回転するが、z方向には移動しない。それゆえ、示された例において、モバイルプラットフォームは、自由度5を有する。
【0045】
制御モジュール108は、位置特定情報117を使用し、第一の指令信号114を生成する。これらの実施例において、位置特定情報117は、環境104で任意の数のモバイルプラットフォーム106についての位置情報116及び/または方向付け情報118を含む。制御モジュール108は、位置特定照合システム110から位置特定情報117を受信する。位置特定照合システム110は、任意の数の通信リンクを使用し、制御モジュール108と通信する。
【0046】
これらの実施例において、位置特定照合システム110は、任意の数のモバイルプラットフォーム106についての位置情報116及び/または方向付け情報118を生成するどんな任意の数の装置をも備える。位置情報116は、たとえば、環境104の任意の数のモバイルプラットフォーム106の任意の数の位置120、及び/または任意の数の位置120を確認するために制御モジュール108が使用するデータを含む。
【0047】
任意の数のモバイルプラットフォーム106の一についての任意の数の位置120の位置は、ある照合ポイントまたは原点に対して、モバイルプラットフォームの3次元的位置とする。照合ポイントは、環境104内または外部とする。
【0048】
たとえば、モバイルプラットフォーム115の位置は、環境104についての座標システム122を使用して定義することができる。座標システム122は、たとえば、限定はしないが、デカルト座標システム、極座標システム、地理座標システム、または別の適する種類の座標システムとする。
【0049】
一つの実施例において、位置特定照合システム110は、モーションキャプチャシステム124を含む。モーションキャプチャシステム124は、たとえば、任意の数のモバイルプラットフォーム106上の任意の数の逆反射マーカーを使用し、環境104で任意の数のモバイルプラットフォーム106の任意の数の位置120を監視する任意の数のカメラを備える。モーションキャプチャシステム124は、また、環境104で任意の数のモバイルプラットフォーム106の移動を監視する。
【0050】
これらの実施例において、位置特定照合システム110は、また、方向付け情報118を確認する。方向付け情報118は、任意の数のモバイルプラットフォーム106についての任意の数の方向付け126、または任意の数のモバイルプラットフォーム106についての任意の数の方向付け126を確認するために使用されるデータを含む。
【0051】
任意の数のモバイルプラットフォーム106の一についての任意の数の方向付け126の一は、任意の数の座標軸に対してモバイルプラットフォームの角回転とする。これらの実施例において、任意の数の座標軸とは三の座標軸である。たとえば、モバイルプラットフォームの方向付けは、ピッチ軸、ロール軸、及びヨー軸を基準に特定することができる。この例で、モバイルプラットフォームの方向付けは、モバイルプラットフォームのアティテュードともいわれる。
【0052】
この方法において、制御モジュール108は、位置特定情報117を使用して第一の指令信号114を生成し、宇宙空間の任意の数の宇宙探査機システム101の移動をエミュレートする方法で、任意の数のモバイルプラットフォーム106を移動させる。特に、位置特定情報117内の位置情報116及び/または方向付け情報118を使用して第一の指令信号114を生成し、閉フィードバックループを形成するようにしてもよい。
【0053】
たとえば、任意の数のモバイルプラットフォーム106は、環境104で移動する。位置特定照合システム110は、この移動に応じて、位置特定情報117を生成する。任意の数のモバイルプラットフォーム106が環境104を移動する間に、任意の数のモバイルプラットフォーム106についての位置特定情報117が継続して生成される。
【0054】
さらに、位置特定照合システム110は、位置特定情報117を制御モジュール108に送信する。情報が生成されている間、その情報は継続的に制御モジュール108に送信される。実施例において、制御モジュール108はこの情報を使用して第一の指令信号114を生成及び送信する。これらの指令信号により、任意の数のモバイルプラットフォーム106は、環境104で同じまたは異なる方法で移動する。この方法において、閉フィードバックループは、任意の数のモバイルプラットフォーム106、位置特定照合システム110、及び制御モジュール108の間に存在する。
【0055】
さらに、位置特定情報117は、位置特定情報117として記録され、位置特定照合システム110によって生成される。位置特定情報117は、検査システム100のデータ管理モジュール130によって記録されてもよい。データ管理モジュール130は、ハードウエア、ソフトウエア、またはその二つの組み合わせを使用して実施される。
【0056】
データ管理モジュール130は、これらの実施例において、制御モジュール108の一部である。もちろん、他の実施例において、データ管理モジュール130の少なくとも一部は、検査システム100内の制御モジュール108とは別の構成要素とする。データ管理モジュール130が別の構成要素である時に、データ管理モジュール130は、任意の数の通信リンクを使用し、位置特定照合システム110及び/または制御モジュール108と通信する。
【0057】
これらの実施例において、第二の任意の数のシステム132は、任意の数のモバイルプラットフォーム106に関連付けられる。特に、第二の任意の数のシステム132の一は、任意の数のモバイルプラットフォーム106の一または複数と関連付けられる。さらに、第二の任意の数のシステム132の一または複数は、任意の数のモバイルプラットフォーム106の一と関連付けられる場合もある。
【0058】
制御モジュール106は第一の指令信号114を第二の任意の数のシステム132に送信する。第一の指令信号114は、第二の任意の数のシステム132に送信され、第一の任意の数のシステム103は、非地球上の陸上環境112で第一の任意の数のシステム103の操作をエミュレートする。
【0059】
つまり、制御モジュール108は、第一の指令信号114を第二の任意の数のシステム132へ送信する。非地球上の陸上環境112で第一の任意の数のシステム103が任意の数の宇宙探査機システム101と関連付けられるときに、これらの指令信号により、第一の任意の数のシステム103が作動するのと同様の方法で、第二の任意の数のシステム132が環境104で作動する。これらの実施例において、第二の任意の数のシステム132は、非地球上の陸上環境112で任意の数の宇宙探査機102とともに使用されるときには、第一の任意の数のシステム103と同じではない。
【0060】
しかしながら、実施例の中には、任意の数のモバイルプラットフォーム106に関連付けられた第二の任意の数のシステム132が、第一の任意の数のシステム103と同じシステムを備えるものもある。この方法において、任意の数の宇宙探査機102に関連付けられる第一の任意の数のシステム103がなくても、第一の任意の数のシステム103は環境104で検査される。第一の任意の数のシステム103及び/または第二の任意の数のシステム132は、これらの実施例の中で、少なくともソフトウエアまたはハードウエアを備える。
【0061】
他の実施例において、第二の任意の数のシステム132の一は、任意の数の宇宙探査機システム101の部分システムとする。たとえば、第二の任意の数のシステム132の一は、任意の数の宇宙探査機102で使用される部分システムとする。一つの実施例において、モバイルプラットフォーム115は、第二の任意の数のシステム132の一を運ぶ地上ロボット車両とする。このシステムは、任意の数の宇宙探査機102で使用される部分システムとする。この方法において、部分システムが使用される宇宙探査機類の検査をすることなく、部分システムが検査される。
【0062】
上述のように、環境104で第一の任意の数のシステム103及び任意の数のモバイルプラットフォーム106の操作中に、第二の任意の数のシステム132は、データ135を生成する。データ管理モジュールは130は、任意の数のモバイルプラットフォーム106についての位置特定情報117に加え、データ135も記憶する。
【0063】
正常性監視モジュール136は、検査システム100に配置してもよい。正常性監視モジュール136は、ハードウエア、ソフトウエア、またはその二つの組み合わせで実施される。しかしながら、他の実施例において、正常性監視モジュール136の少なくとも一部は、制御モジュール108とは別の構成要素とする。
【0064】
正常性監視モジュール136は、任意の数のモバイルプラットフォーム106から正常性監視情報138を受信する。実施次第で、正常性監視情報138の一部は、任意の数のモバイルプラットフォーム106に関連付けられた第二の任意の数のシステム132から受信される。たとえば、正常性監視情報138は、操作特性、性能特性、センサデータ、温度データ、及び/または任意の数のモバイルプラットフォーム106及び/または任意の数のモバイルプラットフォーム106に関連付けられた第二の任意の数のシステム132の正常性を監視するための他の適する情報を含む。
【0065】
正常性監視モジュール136は、正常性監視情報138を使用し、任意の数のモバイルプラットフォーム106及び/または任意の数のモバイルプラットフォーム106に関連付けられた第二の任意の数のシステム132についての正常性状態140を監視する。正常性状態140は、例えば、正常性ステータスとする。この方法において、任意の数のモバイルプラットフォーム106が環境104を介して移動する間に、正常性監視モジュール136は正常性状態140を監視する。
【0066】
上述のように、制御モジュール108は、正常性状態140を使用して第一の指令信号114を生成する。この方法において、制御モジュール108は、正常性状態140に基づき、任意の数のモバイルプラットフォーム106の移動及び/または任意の数のモバイルプラットフォーム106に関連付けられた第二の任意の数のシステム132の操作を制御する。
【0067】
また、これらの表示された例において、制御モジュール108は、シミュレーションモジュール142を備える。シミュレーションモジュール142は、シミュレートされたデータ144を生成する。任意の数のモバイルプラットフォーム106に関連付けられた第二の任意の数のシステム132を使用せずに、任意の数の宇宙探査機102の第一の任意の数のシステム103について、シミュレートされたデータ144が生成される。
【0068】
この実施例において、任意の数のモバイルプラットフォーム106が環境104内を移動する間に、任意の数の宇宙探査機102のシステムについてのシミュレーションを行うシミュレーションモジュール142に応じて、シミュレートされたデータ144が生成される。特に、任意の数のモバイルプラットフォーム106が環境104を移動する間に、任意の数のモバイルプラットフォーム106について記録された位置特定情報117を使用し、任意の数の宇宙探査機102のシステムの操作がシミュレートされる。
【0069】
これらの実施例において、任意の数の宇宙探査機システム101が非地球上の陸上環境112に打ち上げられるのに先立って、検査システム100は、任意の数の宇宙探査機システム101を開発し検査するために使用される。他の実施例において、任意の数の宇宙探査機システム101がすでに非地球上の陸上環境112にあるときに、検査システム100は、任意の数の宇宙探査機システム101の操作を検査するために使用される。様々な実施例における任意の数のシステムの開発及び検査は、システム管理の一部である。
【0070】
一つの実施例では、制御モジュール108は、第二の指令信号146を任意の数の宇宙探査機102に送信し、環境104で任意の数のモバイルプラットフォーム106の検査に基づき、非地球上の陸上環境112で任意の数の宇宙探査機102の操作を制御する。実施例によっては、任意の数のモバイルプラットフォーム106に送信される第一の指令信号114が、第二の指令信号146を生成するために使用されるものもある。
【0071】
制御モジュール108は、任意の数のモバイルプラットフォーム106のうちの特定のものについての指令を生成する指令制御インターフェース147を備える。これらの指令は、実施例において、第一の指令信号114の形式をとる。要するに、第一の指令信号114は、任意の数のモバイルプラットフォーム106の異なるモバイルプラットフォームが異なるフォーマットで指令を使用するような、任意の数のモバイルプラットフォーム106により使用できる形式である。同様の方法で、指令制御インターフェース147は、特定の数の宇宙探査機システム101により使用される形式で、第二の指令信号146を生成する。
【0072】
たとえば、制御モジュール108は第二の指令信号146を任意の数の宇宙探査機102に送信し、任意の数のモバイルプラットフォーム106に送信された第一の指令信号114に基づき、非地球上の陸上環境112で任意の数の宇宙探査機102の複数を調節し、任意の数のモバイルプラットフォーム106の複数を調節する。さらに、第二の指令信号146は、任意の数の宇宙探査機102に送信され、特別な任務のための任意の数のタスクを実行するために、任意の数の宇宙探査機102を調整する。
【0073】
これらのシステムが非地球上の陸上環境112で任意の数の宇宙探査機102に関連付けられるのに先立って、検査システム100が、任意の数の宇宙探査機102の第一の任意の数のシステム103を検査するために使用される実施例もある。たとえば、これらのシステムが任意の数の宇宙探査機102への搬入のため非地球上の陸上環境112へ送信されるのに先立って、任意の数の宇宙探査機102の第一の任意の数のシステム103の一または複数が検査される。
【0074】
さらに、実施例の中には、第二の任意の数のシステム132がすでに非地球上の陸上環境112に到達した後に、第二の任意の数のシステム132を使用し、任意の数の宇宙探査機102の第一の任意の数のシステム103を検査するために、検査システム100が使用される場合もある。他の実施例では、検査が実行され、任意の数のモバイルプラットフォーム106の移動が、任意の数のモバイルプラットフォーム106に関連付けられた第二の任意の数のシステム132の操作に影響するかどうかを判定する。これらの影響は制御モジュール108によって分析され、第一の任意のシステム103上で非地球上の陸上環境112の任意の数の宇宙探査機102の移動の影響を判定する。
【0075】
図1の検査システム100は、好適な実施形態が実施される方法に物理的または技術的な限定を示すことを意味するものではない。図示された構成要素に加え、及び/またはそれらの代わりに、他の構成要素が使用できる。必要のない構成要素もある。また、機能的構成要素を図示するために、ブロックが描かれている。好適な実施形態において実施される際には、これらのブロックの一または複数が組み合わされ、及び/または異なるブロックに分けられる。
【0076】
例えば、実施例の中には、検査システム100は、上述の構成要素に加え、またはそれらの代わりに、他の構成要素を含むものもある。一つの実施例として、検査システム100は、画像システムを備えることができ、環境104で任意の数のモバイルプラットフォーム106の移動の画像及び/または動画を生成する。
【0077】
他の実施例では、検査システム100に関する上述の構成要素の一または複数は、検査システム100内に備えられていなくてもよい。たとえば、場合によっては、正常性監視モジュール136は、検査システム100内に備えられてない。
【0078】
他の実施例では、モバイルプラットフォーム115に関連付けられる第二の任意の数のシステム132の一は、取り外し可能であり、且つ、第二の任意の数のシステム132内の別の一と取替え可能である。この方法では、モバイルプラットフォーム115は、第二の任意の数のシステム132の一または複数を検査するために使用される。さらに、モバイルプラットフォーム115は、様々なシステムを検査するために様々な場所に移動される。
【0079】
別の例として、制御モジュール108は、指令制御インターフェース147を含み、非地球上の陸上環境112で宇宙探査機または他の車両を検査する以外の他の用途で特定のプラットフォームについての指令を生成する。たとえば、指令制御インターフェース147は、他の種類のプラットフォームのための指令を生成するために使用される。プラットフォームは、たとえば、限定はしないが、製造環境で使用されるものとする。
【0080】
たとえば、指令制御インターフェース147は、制限されたアクセス領域、極端な温度状態、極端な放射能状態、及び/または他の種類の状態が存在する製造環境で使用されるプラットフォームのための指令を生成する。さらに、スピード及び/または費用についての製造要求があるときに、指令制御インターフェース147は指令を生成し、製造環境でプラットフォームを作動する。
【0081】
製造環境において、これらのプラットフォームは、コンピュータで数値制御された機械、製造工程を実行するロボット、構成要素及び組立品を検査する車両、自動化ツール、及び他の適した種類のプラットフォームとする。例えば、プラットフォームは、渦電流検査システム、超音波検査システム、カメラシステム、及び他の種類のセンサのうちの少なくとも一を備える車両とする。別の例として、プラットフォームは、たとえば、ドリル、ファスナーシステム、及びシーリングシステムなどのツール、及び製造環境で操作を実行する他の適した種類のツールを備える。
【0082】
プラットフォームは、人間オペレーターの存在を除外または制限する環境で使用される。たとえば、その環境は、放射線、熱、毒ガス、生物災害、及び人間オペレーターには適さない他の状況のうちの少なくとも一を含むものとする。たとえば、プラットフォームは、人間オペレーターが入ることのできない、アクセスが制限された場所にある原子炉で使用されるものとする。
【0083】
また、制御モジュール108及び指令制御インターフェース147は、調査環境で使用される。たとえば、指令制御インターフェース147は、物体の上を移動しその物体の調査を行うプラットフォームとともに使用される。例えば、限定しないが、飛行機、宇宙探査機、船、宇宙ステーション、建物、ダム、及び他の適したプラットフォームなどの物体の非破壊評価検査を実行するために、プラットフォームが制御される。
【0084】
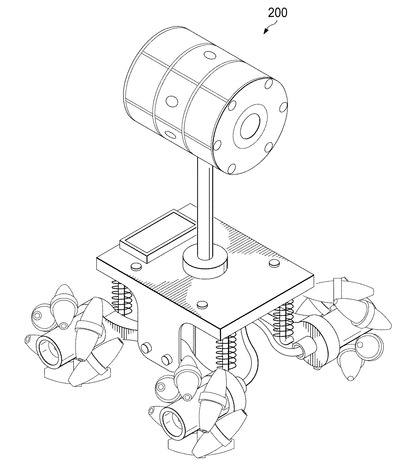
図2を参照して、好適な実施形態によるロボット車両について説明する。この実施例において、ロボット車両200は、図1の任意の数のモバイルプラットフォーム106の一のモバイルプラットフォーム115を物理的に実施する例である。ロボット車両200は、衛星の移動をエミュレートする。 たとえば、ロボット車両200は、地球以外の惑星の周囲の軌道で衛星の移動をエミュレートする方法で移動する。
【0085】
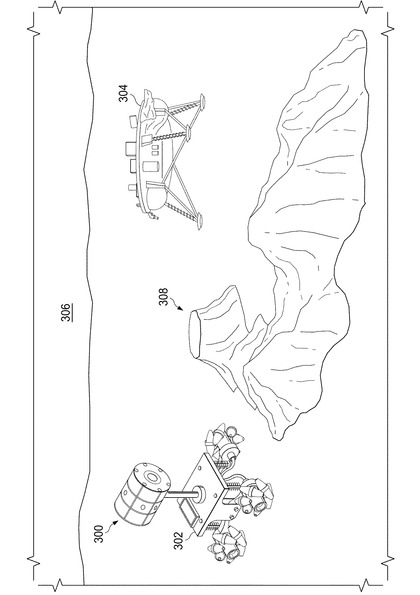
図3を参照して、好適な実施形態による、ある環境での任意の数のモバイルプラットフォームについて説明する。この実施例において、任意の数のモバイルプラットフォーム300は、ロボット車両302及びロボット車両304を備える。この実施例で、ロボット車両302は地上ロボットとする。また、この実施例で、ロボット車両304は航空車両とする。
【0086】
図示されたように、ロボット車両302及びロボット車両304は、環境306内を移動する。特に、ロボット車両302は、環境306の表面308上を移動する。この実施例で、表面308は平らではない表面とする。さらに、この実施例で、ロボット車両304は、環境306の表面308の上空を飛ぶこととする。
【0087】
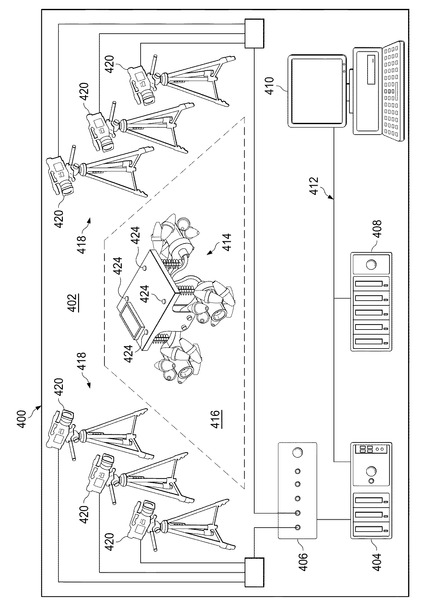
図4を参照して、好適な実施形態による検査システムについて説明する。この実施例において、検査システム400は、図1の検査システム100を実施する一例とする。図示されたように、検査システム400は、環境402、制御モジュール404、及び位置特定照合システム406を備える。
【0088】
この実施例で、環境402は、囲まれた検査環境とする。この実施例で、制御モジュール404は、データ処理システムで実施される。さらに、制御モジュール404は、通信リンク412を使用し、データステーション408及びコンピュータ410と一体化される。この実施例で、通信リンク412は、イーサネット接続とする。
【0089】
図示されたように、検査車両414は、環境402の領域416内を移動する。検査車両414は、図1のモバイルプラットフォーム115を実施する一例とする。これらの実施例において、一の検査車両が例示目的で示される。しかしながら、複数の検査車両が、制御モジュール404を使用して、環境402内で検査されてもよい。
【0090】
環境402内の検査車両414の移動は、モーションキャプチャシステム418を使用して、監視される。モーションキャプチャシステム418は、図1のモーションキャプチャシステム124を実施する一例である。図示されたように、モーションキャプチャシステム418は、複数のモーションキャプチャ装置420を備える。この実施例で、複数のモーションキャプチャ装置420は、複数のカメラを備える。
【0091】
複数のモーションキャプチャ装置420は、環境402の領域416周辺に配置され、検査車両414に取り付けられた複数の逆反射マーカー424の位置、方向付け及び移動を監視する。これらの実施例で、複数のモーションキャプチャ装置420は、可視スペクトルに画像を生成する。しかしながら、他の実施例では、他の種類の装置が使用される。たとえば、複数のモーションキャプチャ装置420は、赤外線画像を生成する。
【0092】
この実施例では、複数のモーションキャプチャ装置420により生成された画像は、実質的にリアルタイムの画像である。言い換えれば、これらの画像は、環境402の領域416で検査車両414の移動の実質的にリアルタイムの動画を形成するために使用される。
【0093】
複数のモーションキャプチャ装置420は、環境402で検査車両414についての位置情報及び方向付け情報を生成する。複数のモーションキャプチャ装置420は、検査車両414についての位置情報及び方向付け情報を処理するために送信する。この実施例では、位置情報及び方向付け情報は、環境402の領域416内に検査車両414の位置と方向付けを含む。
【0094】
他の実施例では、複数のモーションキャプチャ装置420は、環境402で検査車両414の移動の実質的にリアルタイムの動画形式で画像を生成する。これらの画像は、次いで制御モジュール404に送信される。制御モジュール404は、これらの画像を使用して、環境402の領域416で検査車両414の位置及び方向付けを判定する。
【0095】
制御モジュール404は、検査車両414の位置及び方向付けを使用して指令信号を生成し、検査車両414の移動を制御する。これらの指令信号は、任意の数の無線通信リンク上で検査車両414に送信される。
【0096】
この実施例では、制御モジュール404は、指令信号を検査車両414に送信し、非地球上の陸上環境で宇宙探査機の移動をエミュレートする方法で、環境402の領域416内で検査車両414を移動させる。モーションキャプチャシステム418及び制御モジュール404を使用し、検査車両414が環境402内を移動するときに、検査車両414の位置及び方向付けが継続的に監視される。この方法では、検査車両414の移動は、一種の閉フィードバックループを使用して制御される。
【0097】
この実施例では、制御モジュール404は、複数のモーションキャプチャ装置420から受信したどんな画像でもコンピュータ410に送信する。この方法では、オペレーターが、生成される画像及び/またはその画像を使用して生成される位置情報を調べる。この実施例で、これらの画像及び/または位置情報は、実質的にリアルタイムで調べられる。さらに、オペレーターは、コンピュータ410を使用し、制御モジュール404により受信される入力をコンピュータに入れる。この入力は、指令信号を生成する際に使用され、検査車両414に送信される。
【0098】
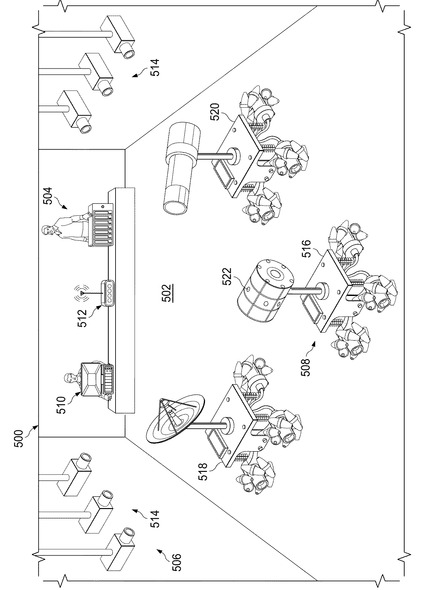
図5を参照し、好適な実施形態による検査システムを説明する。この実施例において、検査システム500は、図1の検査システム100を実施する一例である。図示されたように、検査システム500は、環境502、指令及び制御ステーション504、位置特定照合システム506、及び検査車両508を備える。
【0099】
この実施例で、環境502は、閉鎖環境とする。特に、環境502は、囲まれた建物構造内とする。指令及び制御ステーション504は、コンピュータシステム510を備える。制御モジュール512は、コンピュータシステム510で実施される。
【0100】
位置特定照合システム506は、複数のカメラ514を備える。複数のカメラ514は、環境502の至る所に設置され、環境502で検査車両508の位置、方向付け、及び移動を監視する。位置特定照合システム506は、検査車両508についての位置情報及び方向付け情報を生成し、実質的にリアルタイムで、コンピュータシステム510の制御モジュール512へ送信する。
【0101】
この実施例で、検査車両508は、ロボット車両516、ロボット車両518、及びロボット車両520を備える。これらのロボット車両は、コンピュータシステム510の制御モジュール512から指令信号を受信する。これらの指令信号により、非地球上の陸上環境で任意の数の宇宙探査機の移動をエミュレートする方法で、検査車両508は環境502内を移動する。
【0102】
一つの実施例では、ロボット車両516は、非地球上の陸上環境の宇宙探査機上で使用するためのセンサシステム522に関連付けられる。制御モジュール512は、センサシステム522を操作する上でのロボット車両516の移動効果が監視されるように、センサシステム522を備えるロボット車両516を移動させるために使用される。特に、ロボット車両516が環境502を移動する間にセンサシステム522によって生成されるデータは、処理するために制御モジュール512に送信される。
【0103】
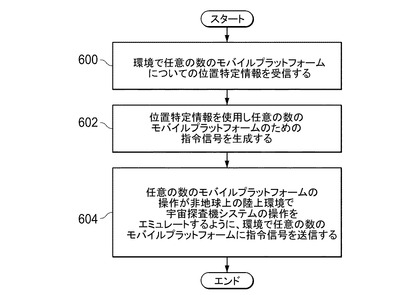
図6を参照し、好適な実施形態による、宇宙探査機の開発及び検査工程のフローチャートについて説明する。図6に示される処理は、図1の任意の数の宇宙探査機システム101を検査するために、図1の検査システム100を使用して実施される。
【0104】
この工程は、ある環境で任意の数のモバイルプラットフォームについての位置特定情報を受信することにより開始する(工程600)。工程600において、位置特定情報は、ある環境での任意の数のモバイルプラットフォームについての位置情報及び/または方向付け情報を含む。位置情報及び/または方向付け情報は位置特定照合システムから受信される。位置特定照合システムは、たとえば、モーションキャプチャシステムとする。
【0105】
工程は、次いで、位置特定情報を使用し、任意の数のモバイルプラットフォームのための指令信号を生成する(工程602)。その後、この工程で、指令信号が任意の数のモバイルプラットフォームに送信され、任意の数のモバイルプラットフォームの操作が非地球上の陸上環境の任意の数の宇宙探査機システムの操作をエミュレートするように、その環境で任意の数のモバイルプラットフォームが作動し(工程604)、この工程はその後終了する。
【0106】
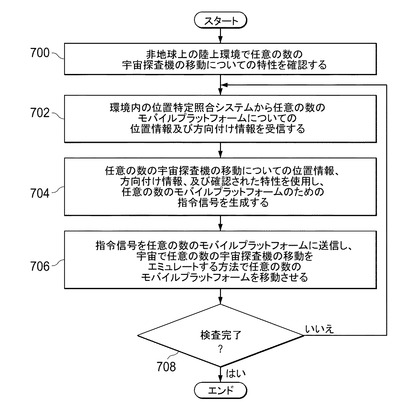
図7を参照し、好適な実施形態による、非地球上の陸上環境で宇宙探査機の移動をエミュレートする工程のフローチャートを説明する。図7に示された工程は、図1の検査システム100を使用して実施される。
【0107】
この工程は、非地球上の陸上環境での任意の数の宇宙探査機の移動についての特性を確認することにより開始する(工程700)。工程700において、これらの特性は、たとえば、各々の宇宙探査機の質量特性、各々の宇宙探査機上の推進システム類、各々の宇宙探査機の推進システムについての特性、任意の数の宇宙探査機の別の一に対する各々の宇宙探査機のアティテュード制御システム、位置、及び/または方向付けの類、通信待ち時間、センサノイズ、各々の宇宙探査機を動かす移動装置の類、記憶されるエネルギー容量、宇宙の天体に対する各々の宇宙探査機の位置及び方向付け、及び/または他の適した種類の特性を含む。
【0108】
さらに、工程700において、任意の数の宇宙探査機の移動についての特性を確認することにより、非地球上の陸上環境についての多くの状態が考慮される。これらの状態は、非地球上の陸上環境で任意の数の宇宙探査機の移動に影響を及ぼす非地球上の陸上環境の状態とする。宇宙環境及び効果は、たとえば、限定はしないが、重力状態、原子状酸素、太陽電磁状態、イオン化放射線、隕石及び軌道の破片、宇宙探査機関連の汚れ、及び/または環境のその他の状態を含む。
【0109】
次に、この工程により、環境に位置付けられた位置特定照合システムから、任意の数のモバイルプラットフォームについての位置情報及び方向付け情報が受信される(工程702)。この工程により、次いで、任意の数の宇宙探査機の移動に関する位置情報、方向付け情報、及び確認された特徴を使用し、任意の数のモバイルプラットフォームのための指令信号が生成される(工程704)。
【0110】
その後、この工程で、指令信号が任意の数のモバイルプラットフォームに送信され、これにより、宇宙で任意の数の宇宙探査機の移動をエミュレートする方法で、任意の数のモバイルプラットフォームが移動する(工程706)。
【0111】
この工程で、次いで、検査が完了したかどうかが判定される(工程708)。検査が完了すると、工程は終了する。そうでなければ、すなわち検査が完了していなければ、工程は上述の工程702に戻る。図7の工程が使用され、指令を製造工程のための任意の数のプラットフォームに送信すると、図7の工程は製造工程が完了するまで継続する。
【0112】
表示された様々な実施形態のフローチャート及びブロック図は、好適な実施形態における装置及び方法のいくつかの実施可能な構造、機能性、及び工程を説明するものである。この点で、フローチャートまたはブロック図の各々のブロックは、モジュール、セグメント、機能、及び/または工程またはステップの一部を示す。たとえば、一または複数のブロックは、プログラムコードとして、ハードウエアの中で、またはプログラムコード及びハードウエアの組み合わせで実施される。ハードウエアの中で実施されるときに、ハードウエアは、たとえば、フローチャートまたはブロック図の一または複数の工程を実行するために製造または構成される集積回路の形式をとる。
【0113】
好適な実施形態の代替手段では、ブロックで示される一または複数の機能は、図面で示される順序とは異なる順序で起こることもある。たとえば、含まれる機能性により、連続して示される二つのブロックは実質的に同時に実行される場合があり、またはブロックが時々逆の順序で実行される場合もある。また、フローチャートやブロック図内のブロックに対し、他のブロックが付加されることもある。
【0114】
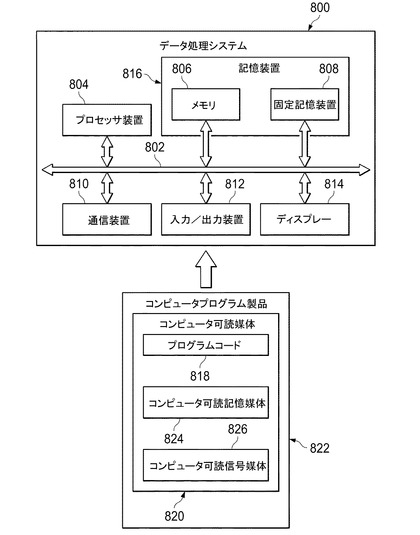
次に図8を参照し、好適な実施形態によるデータ処理システムについて説明する。この実施例では、データ処理システム800は、図1のコンピュータシステム111の一または複数のコンピュータを実施するために使用される。データ処理システム800は、通信構造802を備え、プロセッサ装置804、メモリ806、固定記憶装置808、通信装置810、入力/出力(I/O)装置812、及びディスプレー814の間に通信を提供する。
【0115】
プロセッサ装置804は、メモリ806内に読み込まれるソフトウエアについての指示を実行する役割を果たす。プロセッサ装置804は、特定の実施によっては、任意の数のプロセッサ、マルチプロセッサコア、または別の種類のプロセッサとする。アイテムについて言及するのに使用される任意の数は、一または複数のアイテムを意味する。さらに、プロセッサ装置804は、主要なプロセッサが一のチップ上で補助的なプロセッサとともに存在する、任意の数のヘテロジニアスプロセッサを使用し、実施される。別の実施例として、プロセッサ装置804は、同じ種類のマルチプロセッサを備える対称型マルチプロセッサとする。
【0116】
メモリ806及び固定記憶装置808は、記憶装置816の例である。記憶装置は、たとえば、限定はしないが、データ、関数形式のプログラムコード、及び/または一時的な及び/または永続的なその他の適する情報のような、情報を記憶できるどのようなハードウエアでもよい。記憶装置816は、これらの例の中で、コンピュータ可読記憶装置とも表される。これらの例で、メモリ806は、たとえば、ランダムアクセスメモリまたは他の適する揮発性または非揮発性の記憶装置とする。固定記憶装置808は、特定の実施によっては、様々な形式をとる。
【0117】
たとえば、固定記憶装置808は、一または複数の構成要素または装置を備える。たとえば、固定記憶装置808は、ハードドライブ、フラッシュメモリ、書換型光ディスク、書換型磁気テープ、またはそれらのいくつかを組み合わせたものとする。固定記憶装置808により使用される媒体は、取り外し可能なものでもよい。たとえば、取り外し可能なハードドライブは、固定記憶装置808に使用される。
【0118】
これらの例で、通信装置810は、他のデータ処理システムまたは装置との通信を提供する。この例では、通信装置810は、ネットワーク・インターフェースカードとする。通信ユニット810は、物理及び無線通信リンクのどちらか一方またはその両方を使用して、通信を提供する。
【0119】
入力/出力装置812により、データ処理システム800と接続される他の装置とのデータの入力及び出力が可能になる。たとえば、入力/出力装置812は、キーボード、マウス、及び/または他の適する入力装置を介して、ユーザ入力のための接続を提供する。さらに、入力/出力ユニット812は、プリンタに出力する。ディスプレー814は、ユーザに情報を表示する機構を提供する。
【0120】
オペレーションシステム、アプリケーション、及び/またはプログラムについての指示は、記憶装置816に格納されており、通信構造802を介してプロセッサユニット804と通信している。これらの実施例において、指示は、固定記憶装置808上で機能的形式であるとする。これらの指示は、プロセッサ装置804により実行されるように、メモリ806に読み込まれる。別の実施形態の工程は、コンピュータ実行指示を使用して、プロセッサ装置804により実行され、たとえばメモリ806などのメモリに読み込まれる。
【0121】
これらの指示は、プログラムコード、コンピュータユーザブルプログラムコード、またはコンピュータ可読プロブラムコードとも呼ばれ、プロセッサ装置804でプロセッサにより読み込まれ実行される。別の実施形態のプログラムコードは、たとえばメモリ806または固定記憶装置808などの様々な物理またはコンピュータ可読記憶媒体上で、具体化される。
【0122】
プログラムコード818は、選択的に取り外し可能で、プロセッサ装置804により実行するためのデータ処理システム800上に読み込まれるまたは転送されるコンピュータ可読媒体820上で、機能形式で配置される。これらの例では、プログラムコード818及びコンピュータ可読媒体820は、コンピュータプログラム製品822を形成する。一つの例では、コンピュータ可読媒体820は、コンピュータ可読記憶媒体824またはコンピュータ可読信号媒体826とする。コンピュータ可読記憶媒体824は、たとえば、ハードドライブのように、固定記憶装置808の一部である記憶装置への転送用の、固定記憶装置808の一部であるドライブまたは他の装置へ、挿入または配置される光または磁気ディスクを備える。
【0123】
コンピュータ可読記憶媒体824は、たとえば、ハードドライブ、サムドライブ、またはフラッシュメモリなどの固定記憶装置の形式をとり、データ処理システム800に接続される。コンピュータ可読記憶媒体824には、データ処理システム800から取り外し可能でないものもある。これらの例では、コンピュータ可読記憶媒体824は、プログラムコード818を伝搬または伝送する媒体というよりはむしろ、プログラムコード818を記憶するために使用される物理または実体記憶装置とする。コンピュータ可読記憶媒体824は、コンピュータ可読実体記憶装置、またはコンピュータ可読物理記憶装置ともよばれる。要するに、コンピュータ可読記憶媒体824は、人に触れられる媒体である。
【0124】
もう一つの方法として、プログラムコード818は、コンピュータ可読信号媒体826を使用し、データ処理システム800に転送される。コンピュータ可読信号媒体826は、たとえば、プログラムコード818を備える、伝搬されたデータ信号とする。たとえば、コンピュータ可読信号媒体826は、電磁気信号、光信号、及び/または他の適する種類の信号とする。これらの信号は、たとえば無線通信リンク、光ファイバーケーブル、同軸ケーブル、ワイヤー、及び/または他の適する種類の通信リンクなどの通信リンクで伝送される。要するに、通信リンク及び/または接続は、この実施例において、物理的なものまたは無線であるとする。
【0125】
好適な実施形態では、プログラムコード818は、データ処理システム800内で使用するためのコンピュータ可読信号媒体826を介して、別の装置またはデータ処理システムから固定記憶装置808へ、ネットワーク上でダウンロードされる。たとえば、サーバデータ処理システム内のコンピュータ可読記憶媒体に記憶されたプログラムコードは、サーバからデータ処理システム800へネットワーク上でダウンロードされる。プログラムコード818を提供するデータ処理システムは、サーバコンピュータ、クライアントコンピュータ、またはプログラムコード818を記憶及び伝送できるその他の装置とする。
【0126】
データ処理システム800についての様々な構成要素は、様々な実施形態を実施する方法を構造的に限定するものではない。様々な好適な実施形態は、データ処理システム800について説明された構成要素に加え、またはそれらの代わりに、構成要素を備えるデータ処理システムにおいて、実施される。図8に示されるその他の構成要素は、示された実施例から変形することができる。様々な実施形態は、プログラムコードを実行できるどのようなハードウエア装置またはシステムを使用してでも実施される。一つの例として、データ処理システムは、無機成分と合成された有機成分を備え、及び/または人を除く有機成分全体から構成される。たとえば、記憶装置は有機半導体から構成される。
【0127】
別の実施例では、プロセッサ装置804は、特定の用途のために製造または構成される回路を備えるハードウエア装置の形式をとる。この種類のハードウエアは、操作を実行するための記憶装置からメモリに読み込まれるプログラムコードを必要とせずに、操作を実行する。
【0128】
たとえば、プロセッサ装置804がハードウエア装置の形式をとるときに、プロセッサ装置804は、回路システム、特定用途向け集積回路(ASIC)、プログラム可能理論装置、または任意の数の操作を実行する別の適する種類のハードウエアであるとする。プログラム可能理論装置とともに、装置は任意の数の操作を実行する。装置はその後に再構成され、または任意の数の操作を永続的に実行する。プログラム可能理論装置の例としては、たとえば、プログラム可能理論アレー、プログラム可能アレー理論、フィールドプログラム可能理論アレー、フィールドプログラム可能ゲートアレー、及び他の適するハードウエア装置が含まれる。様々な実施形態の工程はハードウエア装置で実施されるので、この種の実施とともに、プログラムコード818については省略される。
【0129】
さらに別の実施例では、プロセッサ装置804は、コンピュータやハードウエア装置内に見られるプロセッサの組み合わせを使用して実施される。プロセッサユニット804は、プログラムコード818を実行する任意の数のハードウエア装置及び任意の数のプロセッサを備える。この例によれば、任意の数のハードウエア装置で実施されている処理がある一方で、任意の数のプロセッサで実施されている処理もある。
【0130】
別の例では、バスシステムが通信構造802を実施するために使用され、且つ、そのバスシステムはシステムバスまたは入力/出力バスのような一または複数のバスから構成される。もちろん、バスシステムは、バスシステムに取り付けられる様々な構成要素または装置間でのデータ転送のために提供されるどんな種類の構造を使用してでも実施される。
【0131】
さらに、伝達装置は、データを伝送、受信、または送受信する任意の数の装置を備える。通信装置は、たとえば、モデムまたはネットワークアダプタ、二のネットワークアダプタ、またはそれらのいくつかの組み合わせとする。さらに、メモリは、たとえば、メモリ806、または、通信構造802内にあるインターフェース及びメモリコントローラハブに見られるような、キャッシュメモリとする。
【0132】
図面と上述の説明にしたがって、環境104で任意の数のモバイルプラットフォーム106についての位置特定情報117を生成する位置特定照合システム110、及び、位置特定照合システム110から任意の数のモバイルプラットフォーム106についての位置特定情報117を受信し、位置特定情報117を使用して任意の数のモバイルプラットフォームのための指令信号114を生成し、指令信号114を任意の数のモバイルプラットフォーム106に送信し、任意の数のモバイルプラットフォーム106の操作が任意の数の宇宙探査機システム101の操作をエミュレートするように環境104で任意の数のモバイルプラットフォーム106を操作する制御モジュール108を備える装置が開示される。
【0133】
一つの変形例では、装置は任意の数のモバイルプラットフォーム106をさらに備え、任意の数の複数の宇宙探査機システムが非地球上の陸上環境112で作動しているときに、任意の数の宇宙探査機システム101の操作をエミュレートするように、複数のモバイルプラットフォーム106は環境104の中で作動する。一つの例では、任意の数の宇宙探査機システム101は、第一の任意の数のシステム103を備え、及び任意の数のモバイルプラットフォーム106に関連付けられた第二の任意のシステム132をさらに備え、指令信号114が第二の任意の数のシステム132に送信されると、第二の任意の数のシステム132は非地球上の陸上環境112で第一の任意の数のシステム103の操作をエミュレートする。
【0134】
一つの変形例では、装置は、環境104で任意の数のモバイルプラットフォーム106についての位置特定情報117を記録するデータ管理モジュール130をさらに備える。別の例では、データ管理モジュール130は、任意の数のモバイルプラットフォーム106に関連付けられた第二の任意の数のシステム132により生成されるデータ135を記憶する。
【0135】
さらに別の変形例では、装置は、正常性監視情報138を任意の数のモバイルプラットフォーム106から受信し、受信した正常性監視情報138に基づき任意の数のモバイルプラットフォーム106についての正常性状態140を監視する正常性監視モジュール136をさらに備え、指令信号は、任意の数のモバイルプラットフォーム106についての正常性状態に基づき、制御モジュール108によって生成される。
【0136】
一つの代替手段では、指令信号114は第一の指令信号とし、制御モジュール108は、非地球上の陸上環境112で任意の数の宇宙探査機システム101に第二の指令信号114を送信し、非地球上の陸上環境112で任意の数の宇宙探査機システム101の操作を制御する。別の代替手段では、任意の数の宇宙探査機システム101の一は、少なくともソフトウエアまたはハードウエアを備え、任意の数の宇宙探査機システム101の一は、センサシステム、位置確認システム、カメラシステム、推進システム、スラスタシステム、ドッキングシステム、着陸システム、移動システム、電力システム、通信システム、及び制御システムの一から選択される。
【0137】
一つの例では、第一の任意の数のシステム103は、少なくともソフトウエアまたはハードウエアを備え、第一の任意の数のシステム103及び第二の任意の数のシステム132の一は、センサシステム、位置確認システム、カメラシステム、推進システム、スラスタシステム、ドッキングシステム、着陸システム、移動システム、制御システム、電力システム、及び通信システムの一つから選択される。別の例では、任意の数の宇宙探査機システム101の一は、宇宙車両、衛星、スペースシャトル、惑星着陸車両、軌道宇宙探査機、地球周回軌道宇宙探査機、有人宇宙探査機、無人宇宙探査機、宇宙ステーション、ロケット、宇宙ミサイル、宇宙探測機、宇宙ロボット、宇宙服、宇宙プラットフォーム、宇宙装置、及び宇宙組立品の一から選択される。
【0138】
別の態様では、非地球上の陸上環境112で任意の数の宇宙探査機システム101の操作をエミュレートするように環境104内で作動する任意の数のモバイルプラットフォーム106、及び環境104で任意の数のモバイルプラットフォーム106についての位置特定情報117を生成する位置特定照合システム110を備える、任意の数の宇宙探査機システム101の開発及び検査システムが開示される。また、システムは、任意の数のモバイルプラットフォーム106から正常性監視情報138を受信し、受信した正常性監視情報138を使用して任意の数のモバイルプラットフォーム106についての正常性状態140を監視する正常性監視モジュール136と、位置特定照合システム110から任意の数のモバイルプラットフォーム106についての位置特定情報117を受信し、任意の数のモバイルプラットフォーム106についての位置特定情報117及び正常性状態を使用して任意の数のモバイルプラットフォーム106のための指令信号114を生成し、指令信号114を任意の数のモバイルプラットフォーム106に送信し、任意の数のモバイルプラットフォーム106の操作が非地球上の陸上環境112で任意の数の宇宙探査機システムの操作をエミュレートするように、環境104で任意の数のモバイルプラットフォーム106を操作する制御モジュール108を備える。また、システムは、環境104で任意の数のモバイルプラットフォーム106についての位置特定情報117を記録するデータ管理モジュール130を備える。
【0139】
一つの変形例では、任意の数の宇宙探査機システム101は、第一の任意の数のシステム103を備え、及び任意の数のモバイルプラットフォーム106に関連付けられた第二の任意の数のシステム132をさらに備え、指令信号114は第二の任意の数のシステム132に送信され、第一の任意の数のシステム103が非地球上の陸上環境112で作動するときに、第二の任意の数のシステム132は第一の任意の数のシステム103の操作をエミュレートする。
【0140】
一つの例では、任意の数の宇宙探査機システム101の一は、宇宙車両、衛星、スペースシャトル、惑星着陸車両、軌道宇宙探査機、地球周回軌道宇宙探査機、有人宇宙探査機、無人宇宙探査機、宇宙ステーション、ロケット、宇宙ミサイル、宇宙探測機、宇宙ロボット、宇宙服、宇宙プラットフォーム、宇宙装置、及び宇宙組立品の一つから選択される。
【0141】
別の態様では、ある環境で任意の数のモバイルプラットフォーム106についての位置特定情報117を受信し、位置特定情報は位置特定照合システムを使用して生成されること、位置特定情報117を使用して任意の数のモバイルプラットフォーム106のための指令信号114を生成すること、及び指令信号114を任意の数のモバイルプラットフォーム106に送信し、任意の数のモバイルプラットフォーム106の操作が任意の数の宇宙探査機システム101の操作をエミュレートするように、環境104で任意の数のモバイルプラットフォーム104を操作することを含む、任意の数の宇宙探査機システム101を検査する方法が開示される。
【0142】
一つの変形例では、任意の数の宇宙探査機システム101は、第一の任意の数のシステム103を備え、指令信号114を任意の数のモバイルプラットフォーム106に送信することは、任意の数のモバイルプラットフォーム106に関連付けられた第二の任意の数のシステム132に指令信号114を送信し、非地球上の陸上環境で、第二の任意の数のシステム132が第一の任意の数のシステム103の操作をエミュレートすることを含む。一つの例では、方法は、環境104で任意の数のモバイルプラットフォーム106についての位置特定情報117を記録することを含む。さらに別の例では、方法は、任意の数のモバイルプラットフォーム106が環境104を移動している一方で、第二の任意の数のシステム132の操作中に第二の任意の数のシステム132により生成されるデータ135を記憶することをさらに含む。
【0143】
別の変形例では、方法は、任意の数のモバイルプラットフォーム106から正常性監視情報138を受信すること、及び受信した正常性監視情報138に基づき、任意の数のモバイルプラットフォーム106についての正常性状態140を監視することをさらに含み、指令信号114を生成するステップは、任意の数のモバイルプラットフォーム106についての位置特定情報117及び正常性状態140を使用して、指令信号114を生成することを含む。さらに別の変形例では、指令信号114は、第一の指令信号とし、非地球上の陸上環境112で任意の数の宇宙探査機システム101に第二の指令信号114を送信し、非地球上の陸上環境112で任意の数の宇宙探査機システム101の操作を制御することをさらに含む。
【0144】
一つの例では、任意の数の宇宙探査機システム101の一は、宇宙車両、衛星、スペースシャトル、惑星着陸機、軌道宇宙探査機、地球周回軌道宇宙探査機、有人宇宙探査機、無人宇宙探査機、宇宙ステーション、ロケット、宇宙ミサイル、宇宙探測機、宇宙ロボット、宇宙服、宇宙プラットフォーム、宇宙装置、及び宇宙組立品の一から選択される。
【0145】
それゆえ、様々な好適な実施形態は、制御された環境で作動する任意の数のモバイルプラットフォームを使用して、宇宙探査機及び/または宇宙探査機システムの検査のための方法及び装置を提供する。一つの好適な実施形態では、装置は、位置特定照合システム及び制御モジュールを備える。位置特定照合システムは、ある環境で任意の数のモバイルプラットフォームについての位置特定情報を生成する。制御モジュールは、位置特定照合システムから、任意の数のモバイルプラットフォームについての位置特定情報を受信する。
【0146】
制御モジュールは、位置特定情報を使用し、任意の数のモバイルプラットフォームのための指令信号をさらに生成する。制御モジュールは、任意の数のモバイルプラットフォームに指令信号を送信し、任意の数のモバイルプラットフォームの操作が任意の数の宇宙探査機システムの操作をエミュレートするように、その環境で任意の数のモバイルプラットフォームを操作する。
【0147】
この方法において、様々な好適な実施形態が、宇宙探査機及び/または宇宙に打ち上げられる必要のない宇宙探査機システムの検査を実行するシステムを提供する。さらに、このシステムにより、要求される以上に時間がかかる、シミュレーションの実施及び/または完全に機能し完全に組み立てられた試作品の検査をせずに、宇宙探査機及び/または宇宙探査機のシステムの検査が可能になる。この結果、宇宙探査機及び/または宇宙探査機システムの検査に必要な時間、労力、資源の加工、及び/または費用が削減される。
【0148】
本明細書に記載の様々な好適な実施形態は、例示のみを目的として提供されており、開示されている特定の実施形態に限定されるものではない。本発明が属する技術分野の当業者には、多数の変更例や変形例が自明であろう。さらに、異なる好適な実施形態は、他の好適な実施形態とは異なる利益をもたらす。その原理及び実用化を最良に説明する目的、及び、特定の使用に適するよう様々な変更例を伴う様々な実施形態の開示が当業者に理解される目的で、本実施形態が選択及び説明されている。
【符号の説明】
【0149】
200 ロボット車両
300 任意の数のモバイルプラットフォーム
302、304 ロボット車両
306 環境
308 表面
400 検査システム
402 環境
404 制御モジュール
406 位置特定照合システム
408 データステーション
410 コンピュータ
412 通信リンク
414 検査車両
416 領域
418 モーションキャプチャシステム
420 モーションキャプチャ装置
424 複数の逆反射マーカー
500 検査システム
502 環境
504 指令及び制御ステーション
506 位置特定参照システム
508 検査車両
510 コンピュータシステム
512 制御モジュール
514 複数のカメラ
516、518 ロボット車両
522 センサシステム
【技術分野】
【0001】
本発明の開示は、概して車両の開発及び検査、特に、宇宙探査機システムの開発及び検査に関する。
【背景技術】
【0002】
航空車両、水上(水中)車両、及び陸上車両などの車両の開発及び検査の現在利用できる方法は、通常、コンピュータシミュレーションを行うこと及び試作品を検査することを含む。しかしながら、コンピュータシミュレーションを行うことは、要求される以上に時間を浪費するかもしれない。さらに、コンピュータシミュレーションは、検査対象である実際のシステムの多くの複雑さを単純化してしまうかもしれない。
【0003】
同様に、試作品の検査は、要求される以上に費用がかかるかもしれない。たとえば、試作車は、操作コスト、物流問題、安全規定、飛行規定、及び/またはその他の要因により、限定的な任意の時間数及び限定された任意の状況においてのみ飛行することができる。
【0004】
現在利用できる方法と比較して、車両がより早く正確に移動できるようなアルゴリズム及び構造の開発及び検査を可能にするシステムが望まれる。さらにまた、現在利用できる方法と比較して、車両のアルゴリズム及び構造の開発及び検査の費用を削減するシステムが望まれる。
【0005】
それゆえに、起こりうるその他の問題だけではなく、上述した問題の少なくとも何点かを考慮する方法と装置を有することが有利となるだろう。
【発明の概要】
【課題を解決するための手段】
【0006】
一つの好適な実施形態では、装置は、位置特定照合システムと制御モジュールを備える。位置特定照合システムは、ある環境で任意の数のモバイルプラットフォームについての位置特定情報を生成する。制御モジュールは、位置特定照合システムから、任意の数のモバイルプラットフォームについての位置特定情報を受信する。制御モジュールは、位置特定情報を使用し、任意の数のモバイルプラットフォームのための指令信号をさらに生成する。制御モジュールは、さらに、任意の数のモバイルプラットフォームに指令信号を送信し、任意の数のモバイルプラットフォームの操作が任意の数の宇宙探査機システムの操作をエミュレートするように、その環境で任意の数のモバイルプラットフォームを操作する。
【0007】
別の好適な実施形態では、任意の数の宇宙探査機システムを開発及び検査するシステムは、任意の数のモバイルプラットフォームと、位置特定照合システムと、正常性監視モジュールと、制御モジュールと、データ管理モジュールとを備える。任意の数のモバイルプラットフォームは、ある環境の中で作動し、非地球上の陸上環境で任意の数の宇宙探査機システムの操作をエミュレートする。位置特定照合システムは、ある環境で任意の数のモバイルプラットフォームについての位置特定情報を生成する。正常性監視モジュールは、任意の数のモバイルプラットフォームから正常性監視情報を受信し、受信した正常性監視情報を使用して任意の数のモバイルプラットフォームについての正常性状態を監視する。制御モジュールは、位置特定照合システムから、任意の数のモバイルプラットフォームについての位置特定情報を受信する。制御モジュールは、任意の数のモバイルプラットフォームについての位置特定情報と正常性状態を使用し、任意の数のモバイルプラットフォームのための指令信号をさらに生成する。制御モジュールは、さらに、任意の数のモバイルプラットフォームに指令信号を送信し、任意の数のモバイルプラットフォームの操作が非地球上の陸上環境で任意の数の宇宙探査機システムの操作をエミュレートするように、環境内で任意の数のモバイルプラットフォームを操作する。データ管理モジュールは、その環境で任意の数のモバイルプラットフォームについての位置特定情報を記録する。
【0008】
さらに別の好適な実施形態では、任意の数の宇宙探査機システムを検査する方法が提供される。ある環境で任意の数のモバイルプラットフォームについての位置特定情報が受信される。位置特定情報は、位置特定照合システムを使用し生成される。任意の数のモバイルプラットフォームのための指令信号は、位置特定情報を使用し生成される。指令信号は、任意の数のモバイルプラットフォームに送信され、任意の数のモバイルプラットフォームの操作が任意の数の宇宙探査機システムの操作をエミュレートするように、環境内で任意の数のモバイルプラットフォームを操作する。
【0009】
特徴、機能および利点は、本開示のさまざまな実施形態において独立して達成可能であり、または、以下の説明および図面を参照し、さらに詳細が理解可能である他の実施形態において組み合わせることができる。
【図面の簡単な説明】
【0010】
好適な実施形態の特徴と考えられる新しい特徴が、添付した特許請求の範囲で説明される。しかしながら、添付の図面とともに以下につづく発明の詳細な説明を参照することにより、好ましい使用形態、目的、及びその利点と同様に、好適な実施形態が最もよく理解できるであろう。
【0011】
【図1】好適な実施形態による宇宙探査機システムの開発及び検査システムのブロック図を示す。
【図2】好適な実施形態によるロボット車両を図示する。
【図3】好適な実施形態によるある環境での任意の数のモバイルプラットフォームを図示する。
【図4】好適な実施形態による検査システムを図示する。
【図5】好適な実施形態による検査システムを図示する。
【図6】好適な実施形態による宇宙探査機システムの開発及び検査工程のフローチャートを示す。
【図7】好適な実施形態による宇宙での宇宙探査機システムの操作をエミュレートする工程のフローチャートを示す。
【図8】好適な実施形態によるデータ処理システムを図示する。
【発明を実施するための形態】
【0012】
別の好適な実施形態は、一または複数の異なる検討を認識し、且つ考慮する。たとえば、別の好適な実施形態は、宇宙車両を検査するシステムが、航空車両、水上(水中)車両、及び/または陸上車両と比較して、異なる要因を考慮する必要があるという点を認識し、且つ考慮する。
【0013】
別の好適な実施形態は、たとえば、大気圏外、微小重力状態、及び地球の大気圏外のその他の環境などの、環境で作動する車両は、空中、水中、及び/または陸上で作動する車両とは異なる状態で作動するということを認識し、且つ考慮する。地球の大気圏と大気圏外との境界の定義は、カーマン・ラインである。カーマン・ラインとは、地球の海抜およそ100キロメートルの高度の境界線である。
【0014】
他の好適な実施形態は、たとえば、地球の大気圏外の環境のような、環境で作動する車両を検査するときに、その環境の状態に配慮しなければならないことを認識し、且つ考慮する。宇宙環境及び効果とは、たとえば、限定はしないが、重力状態、原子状酸素、太陽電磁効果、イオン化放射線、隕石及び軌道の残屑、宇宙探査機関連の汚れ、及び/またはその他の環境の状態を含む。
【0015】
地球の大気圏外の環境で作動する車両の一つの例は、宇宙探査機である。別の好適な実施形態は、宇宙探査機が作動する環境の状態は宇宙探査機に搭載された様々なシステムの操作に影響することを認識し、且つ考慮する。その結果、別の好適な実施形態は、宇宙探査機及び/または宇宙探査機のシステムを検査するときに、これらの状態に配慮しなければならないことを認識し、且つ考慮する。
【0016】
別の好適な実施形態は、宇宙探査機及び/または宇宙探査機に搭載されたシステムを検査するための現在利用できる方法は、宇宙探査機を宇宙に打ち上げる必要があるということを認識し、且つ考慮する。次いで、宇宙探査機が地球の周りの軌道上にある間に、検査が実行される。この種の検査は、軌道上検査と呼ばれる。
【0017】
別の好適な実施形態は、宇宙探査機の宇宙への打ち上げは、要求される以上に時間と労力がかかることを認識し、且つ考慮する。たとえば、打ち上げは必ずしも計画通りに進むわけではなく、一または複数回の予定変更を要するかも知れない。さらに、打ち上げは、毎回の打ち上げ前と、打ち上げ中と、打ち上げ後とに正しい安全規制に従っていることを確実にするために、要求される以上に多くの時間及び/または労力を必要とする。別の好適な実施形態は、宇宙へ宇宙探査機を打ち上げることは、要求される以上に費用がかかることを認識し、且つ考慮する。
【0018】
加えて、別の好適な実施形態は、宇宙探査機がいったん宇宙へ打ち上げられると、宇宙探査機の検査を実行することが要求される以上に難しいということを認識し、且つ考慮する。たとえば、検査で使用するための宇宙探査機に搭載されたシステムにより生成されたデータを回収することは、要求される以上に難しく、また要求される以上に時間がかかる。さらに、宇宙探査機がいったん宇宙へ打ち上げられてしまうと、物理的に、宇宙車両を回収し地上で追加検査を実行することは、要求される以上に難しい。
【0019】
別の好適な実施形態は、陸上で宇宙探査機を検査するための現在利用できるソリューションが構台ベース及び/またはトラックベースの検査施設を使用することを認識し、且つ考慮する。別の好適な実施形態は、これらの種類の施設により、限定された数の車両が任意の時点で検査されることを認識し、且つ考慮する。
【0020】
また、別の好適な実施形態は、検査が実行される異なる種類の宇宙探査機が、要求される以上に大きく及び/またはより複雑な物的なインフラを備える施設を必要とすることを認識し、且つ考慮する。別の好適な実施形態は、他の種類のプラットフォームを使用し、宇宙で行われる宇宙探査機の操作を検査することが、検査のために必要とされる物的なインフラのサイズを小さくするということを認識し、且つ考慮する。
【0021】
たとえば、宇宙での宇宙探査機の移動をエミュレートする方法で、検査環境内で移動できるモバイルプラットフォームを使用することにより、宇宙探査機が宇宙に打ち上げられる必要のない、及び/または宇宙車両を取り囲むことができるほど大きい検査施設を要求する宇宙探査機の検査が可能になる。さらに、別の好適な実施形態は、宇宙探査機を検査することと比較して宇宙探査機の任意の数のシステムを検査することは、検査に必要な時間及び/または資源も削減することを認識し、且つ考慮する。
【0022】
それゆえ、別の好適な実施形態は、ある環境で作動する任意の数のモバイルプラットフォームを使用し、宇宙探査機及び/または宇宙探査機のシステムを検査するための方法と装置を提供する。一つの好適な実施形態では、装置は、位置特定照合システム及び制御モジュールを備える。位置特定照合システムは、ある環境で任意の数のモバイルプラットフォームについての位置特定情報を生成する。制御モジュールは、位置特定照合システムから、任意の数のモバイルプラットフォームについての位置特定情報を受信する。制御モジュールは、位置特定情報を使用し、任意の数のモバイルプラットフォームのための指令信号をさらに生成する。制御モジュールは、さらに、指令信号を任意の数のモバイルプラットフォームに送信し、任意の数のモバイルプラットフォームの操作が任意の数の宇宙探査機システムの操作をエミュレートするように、その環境で任意の数のモバイルプラットフォームを操作する。
【実施例】
【0023】
図1には、好適な実施形態による宇宙探査機システムの開発及び検査システムのブロック図が示される。これらの実施例おいて、検査システム100は、任意の数の宇宙探査機システム101の開発及び検査に使用することができる。ここで使用されているように、任意の数のアイテムは、一または複数のアイテムを意味する。この方法で、任意の数の宇宙探査機システム101は、一または複数の宇宙探査機を意味する。
【0024】
実施例においては、任意の数の宇宙探査機システム101が、任意の数の宇宙探査機102、任意の数の宇宙探査機102の第一の任意の数のシステム103、またはそれらの組み合わせを備えるものもある。任意の数の宇宙探査機102の一は、地球大気圏外で走行及び/または作動するどのような車両または機械でもよい。たとえば、任意の数の宇宙探査機102は、非地球上の陸上環境112で移動及び/または作動する。
【0025】
これらの実施例において、非地球上の陸上環境112は、地球上の陸上環境でないどんな環境でもよい。地球上の陸上環境とは、地球の構造核、マントル、表面、大気及び水圏のうちの少なくとも一を含むものと定義する。たとえば、非地球上の陸上環境112は、宇宙空間、別の惑星の大気圏及び/または表面、月、小惑星、彗星、及び/または別の環境を含む。非地球上の陸上環境112に適する環境とは、地球上、地球の水域、または地球の大気圏でない環境である。
【0026】
この中で使用されるように、多くのアイテムとともに使用される場合の“〜のうちの少なくとも一”という表現は、一または複数の列挙されたアイテムの一または複数の異なる組み合わせが使用されてもよく、且つ、列挙された中の各々のアイテムの一だけが必要とされてもよいということを意味する。“アイテムA、アイテムB、及びアイテムCのうちの少なくとも一”とは、たとえば、限定はしないが、アイテムAまたはアイテムA及びアイテムBを含むことができる。この例は、アイテムA、アイテムB、及びアイテムC、またはアイテムB及びアイテムCも含むことができる。他の例では、“〜のうちの少なくとも一”は、たとえば、限定はしないが、二のアイテムA、一のアイテムB、及び十のアイテムCとしてもよく、四のアイテムB及び七のアイテムCとしてもよく、且つ他の適する組み合わせとしてもよい。
【0027】
これらの実施例において、非地球上の陸上環境112での操作とは、たとえば、非地球上の陸上環境112内へ、非地球上の陸上環境112から、及び非地球上の陸上環境112を介して走行することのうちの少なくとも一を含む。任意の数の宇宙探査機102の中の宇宙探査機は、宇宙車両、惑星ローバー、衛星、スペースシャトル、惑星着陸車両、軌道宇宙探査機、地球周回軌道宇宙探査機、有人宇宙探査機、無人宇宙探査機、宇宙ステーション、ロケット、宇宙ミサイル、宇宙探測機、宇宙ロボット、及び/または他の適する種類の宇宙探査機の一から選択される。
【0028】
さらに、任意の数の宇宙探査機102の第一の任意の数のシステム103は、任意の数の宇宙探査機102に関連付けられる。この関連付けは、これらの実施例において物理的な関連付けである。別の適する方法において、たとえば第一の任意の数のシステム103の一など、第一の構成要素は、固定され、接着され、取り付けられ、溶接され、留められ、及び/または接続されることにより、たとえば任意の数の宇宙探査機102の一など、第二の構成要素に関連付けられると考えられる。第一の構成要素は、第三の構成要素を使用し、第二の構成要素に接続してもよい。第一の構成要素は、第二の構成要素の一部及び/または延長として形成されることにより、第二の構成要素と関連付けられることも考えられる。
【0029】
これらの実施例において、任意の数の宇宙探査機102の第一の任意の数のシステム103は、センサシステム、位置確認システム、カメラシステム、推進システム、スラスタシステム、ドッキングシステム、着陸システム、移動システム、制御システム、環境システム、断熱システム、放射線防護システム、電力システム、通信システム、または宇宙探査機における別の適する種類のシステムのうちの少なくとも一を含む。
【0030】
これらの実施例において、検査システム100は、環境104、任意の数のモバイルプラットフォーム106、制御モジュール108、及び位置特定照合システム110を備える。環境104は、任意の数のモバイルプラットフォーム106が操作され、非地球上の陸上環境112で任意の数の宇宙探査機システム101の操作をエミュレートするどのような環境でもよい。さらに、環境104は、非地球上の陸上環境112の一または複数の状態をシミュレートする環境も含む。
【0031】
たとえば、環境104は、囲まれた検査環境、実験室、検査施設、低重力模擬環境、または別の適する種類の環境とすることができる。一つの実施例において、環境104は検査室109の形式を取ることができる。検査室109は、非地球上の陸上環境112の一または複数の状態をシミュレーションする。たとえば、限定はしないが、検査室109は、低重力状態、真空空間、極端な温度状態、極端な放射能状態、及び/またはその他の種類の状態をシミュレーションする。
【0032】
任意の数の宇宙探査機システム101が、任意の数の宇宙探査機102に関連付けられた第一の任意の数のシステム103を備えるときに、任意の数の宇宙探査機102が非地球上の陸上環境112内で移動する間に、第一の任意の数のシステム103は非地球上の陸上環境112を移動する。さらに、第一の任意の数のシステム103は、任意の数の宇宙探査機102とは独立して、非地球上の陸上環境112を移動してもよい。
【0033】
任意の数のモバイルプラットフォーム106を使用し、非地球上の陸上環境112で任意の数の宇宙探査機システム101の操作をエミュレートすることは、任意の数の宇宙探査機システム101が非地球上の陸上環境112内で作動する方法と同様の方法で、環境104内で任意の数のモバイルプラットフォーム106を操作することを含む。たとえばモバイルプラットフォーム115など、任意の数のモバイルプラットフォーム106のうちの一を操作することは、モバイルプラットフォームを移動すること、停止すること、減速すること、加速すること、休止すること、その構造を移動すること、操作を実行させること、その構造に操作を実行させること、及びその他の種類の操作を実行することのうちの少なくとも一を含む。
【0034】
この実施例において、非地球上の陸上環境112での状態は地球上の陸上環境での状態と同じではないので、非地球上の陸上環境112で任意の数の宇宙探査機システム101の操作をエミュレートする。例えば、地球上の陸上環境と異なる非地球上の陸上環境112の状態とは、重力状態、大気状態、気象状況、放射能状態、電磁気の状態、太陽圧、太陽束、太陽光、及び/またはその他の適する状態を含む。
【0035】
例えば、任意の数の宇宙探査機システム101が非地球上の陸上環境112にある場合に任意の数の宇宙探査機システム101が作動する方法で、任意の数のモバイルプラットフォーム106は環境104で作動する。要するに、任意の数のモバイルプラットフォームを操作するときには、異なる大気、重力、及び環境104とは異なる他のパラメータが考慮される。たとえば、もし任意の数の宇宙探査機システム101の一がゼロ重力環境で選択された量のスラストを適用すれば、宇宙探査機システムの任意の数のモバイルプラットフォーム106の一のモバイルプラットフォーム115は、宇宙探査機がゼロ重力環境で移動するのと同じスピードと方向で環境104を移動する。
【0036】
実施例の中には、任意の数のモバイルプラットフォーム106が環境104の表面113に移動するものもある。表面113は、これらの例において、平らなまたは平らではない表面とすることができる。例えば、場合によっては、表面113は、地球以外の惑星上の地形を表す。他の実施例において、任意の数のモバイルプラットフォーム106は、空中、水上、水面下、及び/または環境104の別の適する方法で移動する。
【0037】
さらに、これらの実施例では、モバイルプラットフォーム115は、任意の数のモバイルプラットフォーム106の一の例である。モバイルプラットフォーム115は、環境104内で移動するどんな種類のプラットフォームでもよい。例えば、任意の数のモバイルプラットフォーム106の一は、車両、陸上車両、航空車両、宇宙車両、ロボット、ロボットアーム、機械、移動構造、宇宙ロボット、宇宙服、宇宙プラットフォーム、宇宙組立品、宇宙ステーション、惑星着陸車両、宇宙装置、及びその他の適する種類のプラットフォームの一から選択される。
【0038】
たとえば、モバイルプラットフォーム115は、非地球上の陸上環境112で使用するための、検査対象である任意の数の宇宙探査機102の一とする。また、モバイルプラットフォーム115は、検査対象である任意の数の宇宙探査機102の一及び/または第一の任意の数のシステム103の一を保持する車両とする例もある。たとえば、モバイルプラットフォーム115は、非地球上の陸上環境112で任意の数の宇宙探査機102の一または複数を使用するための、検査対象である第一の任意の数のシステム103の一を保持する。
【0039】
これらの実施例において、制御モジュール108は、環境104内で任意の数のモバイルプラットフォーム106の移動を制御する。制御モジュール108は、ハードウエア、ソフトウエア、またはその二つの組み合わせを使用し、実行される。たとえば、制御モジュール108は、コンピュータシステム111で実施される。
【0040】
コンピュータシステム111は、複数のコンピュータを備える。複数のコンピュータが存在すると、これらのコンピュータは互いに通信し合う。さらに、これらのコンピュータの一部は、環境104内に位置付けられている一方で、これらのコンピュータの別の部分は、環境104の外部に位置付けられる。この中で使用されるように、たとえばコンピュータの一部など、アイテムの一部とは、アイテムが零、一、いくつか、またはすべてのアイテムとすることができる。言い換えれば、コンピュータの一部とは、コンピュータが零、一、いくつか、またはすべてのコンピュータとすることができる。
【0041】
さらに、これらの実施例において、制御モジュール108の少なくとも一部は、環境104に、環境104から離れた場所に、及び/または任意の数のモバイルプラットフォーム106に位置付けられる。一つの実施例として、制御モジュール108のすべてが環境104から離れた場所に位置付けられる。別の実施例として、制御モジュール108の一部は、任意の数のモバイルプラットフォーム106の一または複数に位置付けられる。
【0042】
制御モジュール108が任意の数のモバイルプラットフォーム106から離れた場所に位置付けられるときに、制御モジュール108は、任意の数の通信リンクを使用し、任意の数のモバイルプラットフォーム106と通信する。これらの実施例において、通信リンクは、たとえば、無線通信リンク、有線通信リンク、光通信リンク、及び/または他の適する種類の通信リンクの一から選択される。
【0043】
これらの実施例において、任意の数のモバイルプラットフォーム106の移動が非地球上の陸上環境112の任意の数の宇宙探査機システム101の移動をエミュレートするように、制御モジュール108は、任意の数のモバイルプラットフォーム106を移動させる。たとえば、制御モジュール108は、任意の数のモバイルプラットフォーム106に第一の指令信号114を送信し、非地球上の陸上環境112で移動する任意の数の宇宙探査機システム101をエミュレートする方法で、任意の数のモバイルプラットフォーム106を移動させる。
【0044】
これらの実施例において、任意の数のモバイルプラットフォーム106は、自由度6で環境104を移動する。しかしながら、他の実施例において、任意の数のモバイルプラットフォーム106は、たとえば、自由度5または自由度4など、ほとんど自由度がない状態で移動する。たとえば、任意の数のモバイルプラットフォーム106の一は、x方向及びy方向の面にそって移動し、且つ、x軸、y軸、及びz軸の周りを回転するが、z方向には移動しない。それゆえ、示された例において、モバイルプラットフォームは、自由度5を有する。
【0045】
制御モジュール108は、位置特定情報117を使用し、第一の指令信号114を生成する。これらの実施例において、位置特定情報117は、環境104で任意の数のモバイルプラットフォーム106についての位置情報116及び/または方向付け情報118を含む。制御モジュール108は、位置特定照合システム110から位置特定情報117を受信する。位置特定照合システム110は、任意の数の通信リンクを使用し、制御モジュール108と通信する。
【0046】
これらの実施例において、位置特定照合システム110は、任意の数のモバイルプラットフォーム106についての位置情報116及び/または方向付け情報118を生成するどんな任意の数の装置をも備える。位置情報116は、たとえば、環境104の任意の数のモバイルプラットフォーム106の任意の数の位置120、及び/または任意の数の位置120を確認するために制御モジュール108が使用するデータを含む。
【0047】
任意の数のモバイルプラットフォーム106の一についての任意の数の位置120の位置は、ある照合ポイントまたは原点に対して、モバイルプラットフォームの3次元的位置とする。照合ポイントは、環境104内または外部とする。
【0048】
たとえば、モバイルプラットフォーム115の位置は、環境104についての座標システム122を使用して定義することができる。座標システム122は、たとえば、限定はしないが、デカルト座標システム、極座標システム、地理座標システム、または別の適する種類の座標システムとする。
【0049】
一つの実施例において、位置特定照合システム110は、モーションキャプチャシステム124を含む。モーションキャプチャシステム124は、たとえば、任意の数のモバイルプラットフォーム106上の任意の数の逆反射マーカーを使用し、環境104で任意の数のモバイルプラットフォーム106の任意の数の位置120を監視する任意の数のカメラを備える。モーションキャプチャシステム124は、また、環境104で任意の数のモバイルプラットフォーム106の移動を監視する。
【0050】
これらの実施例において、位置特定照合システム110は、また、方向付け情報118を確認する。方向付け情報118は、任意の数のモバイルプラットフォーム106についての任意の数の方向付け126、または任意の数のモバイルプラットフォーム106についての任意の数の方向付け126を確認するために使用されるデータを含む。
【0051】
任意の数のモバイルプラットフォーム106の一についての任意の数の方向付け126の一は、任意の数の座標軸に対してモバイルプラットフォームの角回転とする。これらの実施例において、任意の数の座標軸とは三の座標軸である。たとえば、モバイルプラットフォームの方向付けは、ピッチ軸、ロール軸、及びヨー軸を基準に特定することができる。この例で、モバイルプラットフォームの方向付けは、モバイルプラットフォームのアティテュードともいわれる。
【0052】
この方法において、制御モジュール108は、位置特定情報117を使用して第一の指令信号114を生成し、宇宙空間の任意の数の宇宙探査機システム101の移動をエミュレートする方法で、任意の数のモバイルプラットフォーム106を移動させる。特に、位置特定情報117内の位置情報116及び/または方向付け情報118を使用して第一の指令信号114を生成し、閉フィードバックループを形成するようにしてもよい。
【0053】
たとえば、任意の数のモバイルプラットフォーム106は、環境104で移動する。位置特定照合システム110は、この移動に応じて、位置特定情報117を生成する。任意の数のモバイルプラットフォーム106が環境104を移動する間に、任意の数のモバイルプラットフォーム106についての位置特定情報117が継続して生成される。
【0054】
さらに、位置特定照合システム110は、位置特定情報117を制御モジュール108に送信する。情報が生成されている間、その情報は継続的に制御モジュール108に送信される。実施例において、制御モジュール108はこの情報を使用して第一の指令信号114を生成及び送信する。これらの指令信号により、任意の数のモバイルプラットフォーム106は、環境104で同じまたは異なる方法で移動する。この方法において、閉フィードバックループは、任意の数のモバイルプラットフォーム106、位置特定照合システム110、及び制御モジュール108の間に存在する。
【0055】
さらに、位置特定情報117は、位置特定情報117として記録され、位置特定照合システム110によって生成される。位置特定情報117は、検査システム100のデータ管理モジュール130によって記録されてもよい。データ管理モジュール130は、ハードウエア、ソフトウエア、またはその二つの組み合わせを使用して実施される。
【0056】
データ管理モジュール130は、これらの実施例において、制御モジュール108の一部である。もちろん、他の実施例において、データ管理モジュール130の少なくとも一部は、検査システム100内の制御モジュール108とは別の構成要素とする。データ管理モジュール130が別の構成要素である時に、データ管理モジュール130は、任意の数の通信リンクを使用し、位置特定照合システム110及び/または制御モジュール108と通信する。
【0057】
これらの実施例において、第二の任意の数のシステム132は、任意の数のモバイルプラットフォーム106に関連付けられる。特に、第二の任意の数のシステム132の一は、任意の数のモバイルプラットフォーム106の一または複数と関連付けられる。さらに、第二の任意の数のシステム132の一または複数は、任意の数のモバイルプラットフォーム106の一と関連付けられる場合もある。
【0058】
制御モジュール106は第一の指令信号114を第二の任意の数のシステム132に送信する。第一の指令信号114は、第二の任意の数のシステム132に送信され、第一の任意の数のシステム103は、非地球上の陸上環境112で第一の任意の数のシステム103の操作をエミュレートする。
【0059】
つまり、制御モジュール108は、第一の指令信号114を第二の任意の数のシステム132へ送信する。非地球上の陸上環境112で第一の任意の数のシステム103が任意の数の宇宙探査機システム101と関連付けられるときに、これらの指令信号により、第一の任意の数のシステム103が作動するのと同様の方法で、第二の任意の数のシステム132が環境104で作動する。これらの実施例において、第二の任意の数のシステム132は、非地球上の陸上環境112で任意の数の宇宙探査機102とともに使用されるときには、第一の任意の数のシステム103と同じではない。
【0060】
しかしながら、実施例の中には、任意の数のモバイルプラットフォーム106に関連付けられた第二の任意の数のシステム132が、第一の任意の数のシステム103と同じシステムを備えるものもある。この方法において、任意の数の宇宙探査機102に関連付けられる第一の任意の数のシステム103がなくても、第一の任意の数のシステム103は環境104で検査される。第一の任意の数のシステム103及び/または第二の任意の数のシステム132は、これらの実施例の中で、少なくともソフトウエアまたはハードウエアを備える。
【0061】
他の実施例において、第二の任意の数のシステム132の一は、任意の数の宇宙探査機システム101の部分システムとする。たとえば、第二の任意の数のシステム132の一は、任意の数の宇宙探査機102で使用される部分システムとする。一つの実施例において、モバイルプラットフォーム115は、第二の任意の数のシステム132の一を運ぶ地上ロボット車両とする。このシステムは、任意の数の宇宙探査機102で使用される部分システムとする。この方法において、部分システムが使用される宇宙探査機類の検査をすることなく、部分システムが検査される。
【0062】
上述のように、環境104で第一の任意の数のシステム103及び任意の数のモバイルプラットフォーム106の操作中に、第二の任意の数のシステム132は、データ135を生成する。データ管理モジュールは130は、任意の数のモバイルプラットフォーム106についての位置特定情報117に加え、データ135も記憶する。
【0063】
正常性監視モジュール136は、検査システム100に配置してもよい。正常性監視モジュール136は、ハードウエア、ソフトウエア、またはその二つの組み合わせで実施される。しかしながら、他の実施例において、正常性監視モジュール136の少なくとも一部は、制御モジュール108とは別の構成要素とする。
【0064】
正常性監視モジュール136は、任意の数のモバイルプラットフォーム106から正常性監視情報138を受信する。実施次第で、正常性監視情報138の一部は、任意の数のモバイルプラットフォーム106に関連付けられた第二の任意の数のシステム132から受信される。たとえば、正常性監視情報138は、操作特性、性能特性、センサデータ、温度データ、及び/または任意の数のモバイルプラットフォーム106及び/または任意の数のモバイルプラットフォーム106に関連付けられた第二の任意の数のシステム132の正常性を監視するための他の適する情報を含む。
【0065】
正常性監視モジュール136は、正常性監視情報138を使用し、任意の数のモバイルプラットフォーム106及び/または任意の数のモバイルプラットフォーム106に関連付けられた第二の任意の数のシステム132についての正常性状態140を監視する。正常性状態140は、例えば、正常性ステータスとする。この方法において、任意の数のモバイルプラットフォーム106が環境104を介して移動する間に、正常性監視モジュール136は正常性状態140を監視する。
【0066】
上述のように、制御モジュール108は、正常性状態140を使用して第一の指令信号114を生成する。この方法において、制御モジュール108は、正常性状態140に基づき、任意の数のモバイルプラットフォーム106の移動及び/または任意の数のモバイルプラットフォーム106に関連付けられた第二の任意の数のシステム132の操作を制御する。
【0067】
また、これらの表示された例において、制御モジュール108は、シミュレーションモジュール142を備える。シミュレーションモジュール142は、シミュレートされたデータ144を生成する。任意の数のモバイルプラットフォーム106に関連付けられた第二の任意の数のシステム132を使用せずに、任意の数の宇宙探査機102の第一の任意の数のシステム103について、シミュレートされたデータ144が生成される。
【0068】
この実施例において、任意の数のモバイルプラットフォーム106が環境104内を移動する間に、任意の数の宇宙探査機102のシステムについてのシミュレーションを行うシミュレーションモジュール142に応じて、シミュレートされたデータ144が生成される。特に、任意の数のモバイルプラットフォーム106が環境104を移動する間に、任意の数のモバイルプラットフォーム106について記録された位置特定情報117を使用し、任意の数の宇宙探査機102のシステムの操作がシミュレートされる。
【0069】
これらの実施例において、任意の数の宇宙探査機システム101が非地球上の陸上環境112に打ち上げられるのに先立って、検査システム100は、任意の数の宇宙探査機システム101を開発し検査するために使用される。他の実施例において、任意の数の宇宙探査機システム101がすでに非地球上の陸上環境112にあるときに、検査システム100は、任意の数の宇宙探査機システム101の操作を検査するために使用される。様々な実施例における任意の数のシステムの開発及び検査は、システム管理の一部である。
【0070】
一つの実施例では、制御モジュール108は、第二の指令信号146を任意の数の宇宙探査機102に送信し、環境104で任意の数のモバイルプラットフォーム106の検査に基づき、非地球上の陸上環境112で任意の数の宇宙探査機102の操作を制御する。実施例によっては、任意の数のモバイルプラットフォーム106に送信される第一の指令信号114が、第二の指令信号146を生成するために使用されるものもある。
【0071】
制御モジュール108は、任意の数のモバイルプラットフォーム106のうちの特定のものについての指令を生成する指令制御インターフェース147を備える。これらの指令は、実施例において、第一の指令信号114の形式をとる。要するに、第一の指令信号114は、任意の数のモバイルプラットフォーム106の異なるモバイルプラットフォームが異なるフォーマットで指令を使用するような、任意の数のモバイルプラットフォーム106により使用できる形式である。同様の方法で、指令制御インターフェース147は、特定の数の宇宙探査機システム101により使用される形式で、第二の指令信号146を生成する。
【0072】
たとえば、制御モジュール108は第二の指令信号146を任意の数の宇宙探査機102に送信し、任意の数のモバイルプラットフォーム106に送信された第一の指令信号114に基づき、非地球上の陸上環境112で任意の数の宇宙探査機102の複数を調節し、任意の数のモバイルプラットフォーム106の複数を調節する。さらに、第二の指令信号146は、任意の数の宇宙探査機102に送信され、特別な任務のための任意の数のタスクを実行するために、任意の数の宇宙探査機102を調整する。
【0073】
これらのシステムが非地球上の陸上環境112で任意の数の宇宙探査機102に関連付けられるのに先立って、検査システム100が、任意の数の宇宙探査機102の第一の任意の数のシステム103を検査するために使用される実施例もある。たとえば、これらのシステムが任意の数の宇宙探査機102への搬入のため非地球上の陸上環境112へ送信されるのに先立って、任意の数の宇宙探査機102の第一の任意の数のシステム103の一または複数が検査される。
【0074】
さらに、実施例の中には、第二の任意の数のシステム132がすでに非地球上の陸上環境112に到達した後に、第二の任意の数のシステム132を使用し、任意の数の宇宙探査機102の第一の任意の数のシステム103を検査するために、検査システム100が使用される場合もある。他の実施例では、検査が実行され、任意の数のモバイルプラットフォーム106の移動が、任意の数のモバイルプラットフォーム106に関連付けられた第二の任意の数のシステム132の操作に影響するかどうかを判定する。これらの影響は制御モジュール108によって分析され、第一の任意のシステム103上で非地球上の陸上環境112の任意の数の宇宙探査機102の移動の影響を判定する。
【0075】
図1の検査システム100は、好適な実施形態が実施される方法に物理的または技術的な限定を示すことを意味するものではない。図示された構成要素に加え、及び/またはそれらの代わりに、他の構成要素が使用できる。必要のない構成要素もある。また、機能的構成要素を図示するために、ブロックが描かれている。好適な実施形態において実施される際には、これらのブロックの一または複数が組み合わされ、及び/または異なるブロックに分けられる。
【0076】
例えば、実施例の中には、検査システム100は、上述の構成要素に加え、またはそれらの代わりに、他の構成要素を含むものもある。一つの実施例として、検査システム100は、画像システムを備えることができ、環境104で任意の数のモバイルプラットフォーム106の移動の画像及び/または動画を生成する。
【0077】
他の実施例では、検査システム100に関する上述の構成要素の一または複数は、検査システム100内に備えられていなくてもよい。たとえば、場合によっては、正常性監視モジュール136は、検査システム100内に備えられてない。
【0078】
他の実施例では、モバイルプラットフォーム115に関連付けられる第二の任意の数のシステム132の一は、取り外し可能であり、且つ、第二の任意の数のシステム132内の別の一と取替え可能である。この方法では、モバイルプラットフォーム115は、第二の任意の数のシステム132の一または複数を検査するために使用される。さらに、モバイルプラットフォーム115は、様々なシステムを検査するために様々な場所に移動される。
【0079】
別の例として、制御モジュール108は、指令制御インターフェース147を含み、非地球上の陸上環境112で宇宙探査機または他の車両を検査する以外の他の用途で特定のプラットフォームについての指令を生成する。たとえば、指令制御インターフェース147は、他の種類のプラットフォームのための指令を生成するために使用される。プラットフォームは、たとえば、限定はしないが、製造環境で使用されるものとする。
【0080】
たとえば、指令制御インターフェース147は、制限されたアクセス領域、極端な温度状態、極端な放射能状態、及び/または他の種類の状態が存在する製造環境で使用されるプラットフォームのための指令を生成する。さらに、スピード及び/または費用についての製造要求があるときに、指令制御インターフェース147は指令を生成し、製造環境でプラットフォームを作動する。
【0081】
製造環境において、これらのプラットフォームは、コンピュータで数値制御された機械、製造工程を実行するロボット、構成要素及び組立品を検査する車両、自動化ツール、及び他の適した種類のプラットフォームとする。例えば、プラットフォームは、渦電流検査システム、超音波検査システム、カメラシステム、及び他の種類のセンサのうちの少なくとも一を備える車両とする。別の例として、プラットフォームは、たとえば、ドリル、ファスナーシステム、及びシーリングシステムなどのツール、及び製造環境で操作を実行する他の適した種類のツールを備える。
【0082】
プラットフォームは、人間オペレーターの存在を除外または制限する環境で使用される。たとえば、その環境は、放射線、熱、毒ガス、生物災害、及び人間オペレーターには適さない他の状況のうちの少なくとも一を含むものとする。たとえば、プラットフォームは、人間オペレーターが入ることのできない、アクセスが制限された場所にある原子炉で使用されるものとする。
【0083】
また、制御モジュール108及び指令制御インターフェース147は、調査環境で使用される。たとえば、指令制御インターフェース147は、物体の上を移動しその物体の調査を行うプラットフォームとともに使用される。例えば、限定しないが、飛行機、宇宙探査機、船、宇宙ステーション、建物、ダム、及び他の適したプラットフォームなどの物体の非破壊評価検査を実行するために、プラットフォームが制御される。
【0084】
図2を参照して、好適な実施形態によるロボット車両について説明する。この実施例において、ロボット車両200は、図1の任意の数のモバイルプラットフォーム106の一のモバイルプラットフォーム115を物理的に実施する例である。ロボット車両200は、衛星の移動をエミュレートする。 たとえば、ロボット車両200は、地球以外の惑星の周囲の軌道で衛星の移動をエミュレートする方法で移動する。
【0085】
図3を参照して、好適な実施形態による、ある環境での任意の数のモバイルプラットフォームについて説明する。この実施例において、任意の数のモバイルプラットフォーム300は、ロボット車両302及びロボット車両304を備える。この実施例で、ロボット車両302は地上ロボットとする。また、この実施例で、ロボット車両304は航空車両とする。
【0086】
図示されたように、ロボット車両302及びロボット車両304は、環境306内を移動する。特に、ロボット車両302は、環境306の表面308上を移動する。この実施例で、表面308は平らではない表面とする。さらに、この実施例で、ロボット車両304は、環境306の表面308の上空を飛ぶこととする。
【0087】
図4を参照して、好適な実施形態による検査システムについて説明する。この実施例において、検査システム400は、図1の検査システム100を実施する一例とする。図示されたように、検査システム400は、環境402、制御モジュール404、及び位置特定照合システム406を備える。
【0088】
この実施例で、環境402は、囲まれた検査環境とする。この実施例で、制御モジュール404は、データ処理システムで実施される。さらに、制御モジュール404は、通信リンク412を使用し、データステーション408及びコンピュータ410と一体化される。この実施例で、通信リンク412は、イーサネット接続とする。
【0089】
図示されたように、検査車両414は、環境402の領域416内を移動する。検査車両414は、図1のモバイルプラットフォーム115を実施する一例とする。これらの実施例において、一の検査車両が例示目的で示される。しかしながら、複数の検査車両が、制御モジュール404を使用して、環境402内で検査されてもよい。
【0090】
環境402内の検査車両414の移動は、モーションキャプチャシステム418を使用して、監視される。モーションキャプチャシステム418は、図1のモーションキャプチャシステム124を実施する一例である。図示されたように、モーションキャプチャシステム418は、複数のモーションキャプチャ装置420を備える。この実施例で、複数のモーションキャプチャ装置420は、複数のカメラを備える。
【0091】
複数のモーションキャプチャ装置420は、環境402の領域416周辺に配置され、検査車両414に取り付けられた複数の逆反射マーカー424の位置、方向付け及び移動を監視する。これらの実施例で、複数のモーションキャプチャ装置420は、可視スペクトルに画像を生成する。しかしながら、他の実施例では、他の種類の装置が使用される。たとえば、複数のモーションキャプチャ装置420は、赤外線画像を生成する。
【0092】
この実施例では、複数のモーションキャプチャ装置420により生成された画像は、実質的にリアルタイムの画像である。言い換えれば、これらの画像は、環境402の領域416で検査車両414の移動の実質的にリアルタイムの動画を形成するために使用される。
【0093】
複数のモーションキャプチャ装置420は、環境402で検査車両414についての位置情報及び方向付け情報を生成する。複数のモーションキャプチャ装置420は、検査車両414についての位置情報及び方向付け情報を処理するために送信する。この実施例では、位置情報及び方向付け情報は、環境402の領域416内に検査車両414の位置と方向付けを含む。
【0094】
他の実施例では、複数のモーションキャプチャ装置420は、環境402で検査車両414の移動の実質的にリアルタイムの動画形式で画像を生成する。これらの画像は、次いで制御モジュール404に送信される。制御モジュール404は、これらの画像を使用して、環境402の領域416で検査車両414の位置及び方向付けを判定する。
【0095】
制御モジュール404は、検査車両414の位置及び方向付けを使用して指令信号を生成し、検査車両414の移動を制御する。これらの指令信号は、任意の数の無線通信リンク上で検査車両414に送信される。
【0096】
この実施例では、制御モジュール404は、指令信号を検査車両414に送信し、非地球上の陸上環境で宇宙探査機の移動をエミュレートする方法で、環境402の領域416内で検査車両414を移動させる。モーションキャプチャシステム418及び制御モジュール404を使用し、検査車両414が環境402内を移動するときに、検査車両414の位置及び方向付けが継続的に監視される。この方法では、検査車両414の移動は、一種の閉フィードバックループを使用して制御される。
【0097】
この実施例では、制御モジュール404は、複数のモーションキャプチャ装置420から受信したどんな画像でもコンピュータ410に送信する。この方法では、オペレーターが、生成される画像及び/またはその画像を使用して生成される位置情報を調べる。この実施例で、これらの画像及び/または位置情報は、実質的にリアルタイムで調べられる。さらに、オペレーターは、コンピュータ410を使用し、制御モジュール404により受信される入力をコンピュータに入れる。この入力は、指令信号を生成する際に使用され、検査車両414に送信される。
【0098】
図5を参照し、好適な実施形態による検査システムを説明する。この実施例において、検査システム500は、図1の検査システム100を実施する一例である。図示されたように、検査システム500は、環境502、指令及び制御ステーション504、位置特定照合システム506、及び検査車両508を備える。
【0099】
この実施例で、環境502は、閉鎖環境とする。特に、環境502は、囲まれた建物構造内とする。指令及び制御ステーション504は、コンピュータシステム510を備える。制御モジュール512は、コンピュータシステム510で実施される。
【0100】
位置特定照合システム506は、複数のカメラ514を備える。複数のカメラ514は、環境502の至る所に設置され、環境502で検査車両508の位置、方向付け、及び移動を監視する。位置特定照合システム506は、検査車両508についての位置情報及び方向付け情報を生成し、実質的にリアルタイムで、コンピュータシステム510の制御モジュール512へ送信する。
【0101】
この実施例で、検査車両508は、ロボット車両516、ロボット車両518、及びロボット車両520を備える。これらのロボット車両は、コンピュータシステム510の制御モジュール512から指令信号を受信する。これらの指令信号により、非地球上の陸上環境で任意の数の宇宙探査機の移動をエミュレートする方法で、検査車両508は環境502内を移動する。
【0102】
一つの実施例では、ロボット車両516は、非地球上の陸上環境の宇宙探査機上で使用するためのセンサシステム522に関連付けられる。制御モジュール512は、センサシステム522を操作する上でのロボット車両516の移動効果が監視されるように、センサシステム522を備えるロボット車両516を移動させるために使用される。特に、ロボット車両516が環境502を移動する間にセンサシステム522によって生成されるデータは、処理するために制御モジュール512に送信される。
【0103】
図6を参照し、好適な実施形態による、宇宙探査機の開発及び検査工程のフローチャートについて説明する。図6に示される処理は、図1の任意の数の宇宙探査機システム101を検査するために、図1の検査システム100を使用して実施される。
【0104】
この工程は、ある環境で任意の数のモバイルプラットフォームについての位置特定情報を受信することにより開始する(工程600)。工程600において、位置特定情報は、ある環境での任意の数のモバイルプラットフォームについての位置情報及び/または方向付け情報を含む。位置情報及び/または方向付け情報は位置特定照合システムから受信される。位置特定照合システムは、たとえば、モーションキャプチャシステムとする。
【0105】
工程は、次いで、位置特定情報を使用し、任意の数のモバイルプラットフォームのための指令信号を生成する(工程602)。その後、この工程で、指令信号が任意の数のモバイルプラットフォームに送信され、任意の数のモバイルプラットフォームの操作が非地球上の陸上環境の任意の数の宇宙探査機システムの操作をエミュレートするように、その環境で任意の数のモバイルプラットフォームが作動し(工程604)、この工程はその後終了する。
【0106】
図7を参照し、好適な実施形態による、非地球上の陸上環境で宇宙探査機の移動をエミュレートする工程のフローチャートを説明する。図7に示された工程は、図1の検査システム100を使用して実施される。
【0107】
この工程は、非地球上の陸上環境での任意の数の宇宙探査機の移動についての特性を確認することにより開始する(工程700)。工程700において、これらの特性は、たとえば、各々の宇宙探査機の質量特性、各々の宇宙探査機上の推進システム類、各々の宇宙探査機の推進システムについての特性、任意の数の宇宙探査機の別の一に対する各々の宇宙探査機のアティテュード制御システム、位置、及び/または方向付けの類、通信待ち時間、センサノイズ、各々の宇宙探査機を動かす移動装置の類、記憶されるエネルギー容量、宇宙の天体に対する各々の宇宙探査機の位置及び方向付け、及び/または他の適した種類の特性を含む。
【0108】
さらに、工程700において、任意の数の宇宙探査機の移動についての特性を確認することにより、非地球上の陸上環境についての多くの状態が考慮される。これらの状態は、非地球上の陸上環境で任意の数の宇宙探査機の移動に影響を及ぼす非地球上の陸上環境の状態とする。宇宙環境及び効果は、たとえば、限定はしないが、重力状態、原子状酸素、太陽電磁状態、イオン化放射線、隕石及び軌道の破片、宇宙探査機関連の汚れ、及び/または環境のその他の状態を含む。
【0109】
次に、この工程により、環境に位置付けられた位置特定照合システムから、任意の数のモバイルプラットフォームについての位置情報及び方向付け情報が受信される(工程702)。この工程により、次いで、任意の数の宇宙探査機の移動に関する位置情報、方向付け情報、及び確認された特徴を使用し、任意の数のモバイルプラットフォームのための指令信号が生成される(工程704)。
【0110】
その後、この工程で、指令信号が任意の数のモバイルプラットフォームに送信され、これにより、宇宙で任意の数の宇宙探査機の移動をエミュレートする方法で、任意の数のモバイルプラットフォームが移動する(工程706)。
【0111】
この工程で、次いで、検査が完了したかどうかが判定される(工程708)。検査が完了すると、工程は終了する。そうでなければ、すなわち検査が完了していなければ、工程は上述の工程702に戻る。図7の工程が使用され、指令を製造工程のための任意の数のプラットフォームに送信すると、図7の工程は製造工程が完了するまで継続する。
【0112】
表示された様々な実施形態のフローチャート及びブロック図は、好適な実施形態における装置及び方法のいくつかの実施可能な構造、機能性、及び工程を説明するものである。この点で、フローチャートまたはブロック図の各々のブロックは、モジュール、セグメント、機能、及び/または工程またはステップの一部を示す。たとえば、一または複数のブロックは、プログラムコードとして、ハードウエアの中で、またはプログラムコード及びハードウエアの組み合わせで実施される。ハードウエアの中で実施されるときに、ハードウエアは、たとえば、フローチャートまたはブロック図の一または複数の工程を実行するために製造または構成される集積回路の形式をとる。
【0113】
好適な実施形態の代替手段では、ブロックで示される一または複数の機能は、図面で示される順序とは異なる順序で起こることもある。たとえば、含まれる機能性により、連続して示される二つのブロックは実質的に同時に実行される場合があり、またはブロックが時々逆の順序で実行される場合もある。また、フローチャートやブロック図内のブロックに対し、他のブロックが付加されることもある。
【0114】
次に図8を参照し、好適な実施形態によるデータ処理システムについて説明する。この実施例では、データ処理システム800は、図1のコンピュータシステム111の一または複数のコンピュータを実施するために使用される。データ処理システム800は、通信構造802を備え、プロセッサ装置804、メモリ806、固定記憶装置808、通信装置810、入力/出力(I/O)装置812、及びディスプレー814の間に通信を提供する。
【0115】
プロセッサ装置804は、メモリ806内に読み込まれるソフトウエアについての指示を実行する役割を果たす。プロセッサ装置804は、特定の実施によっては、任意の数のプロセッサ、マルチプロセッサコア、または別の種類のプロセッサとする。アイテムについて言及するのに使用される任意の数は、一または複数のアイテムを意味する。さらに、プロセッサ装置804は、主要なプロセッサが一のチップ上で補助的なプロセッサとともに存在する、任意の数のヘテロジニアスプロセッサを使用し、実施される。別の実施例として、プロセッサ装置804は、同じ種類のマルチプロセッサを備える対称型マルチプロセッサとする。
【0116】
メモリ806及び固定記憶装置808は、記憶装置816の例である。記憶装置は、たとえば、限定はしないが、データ、関数形式のプログラムコード、及び/または一時的な及び/または永続的なその他の適する情報のような、情報を記憶できるどのようなハードウエアでもよい。記憶装置816は、これらの例の中で、コンピュータ可読記憶装置とも表される。これらの例で、メモリ806は、たとえば、ランダムアクセスメモリまたは他の適する揮発性または非揮発性の記憶装置とする。固定記憶装置808は、特定の実施によっては、様々な形式をとる。
【0117】
たとえば、固定記憶装置808は、一または複数の構成要素または装置を備える。たとえば、固定記憶装置808は、ハードドライブ、フラッシュメモリ、書換型光ディスク、書換型磁気テープ、またはそれらのいくつかを組み合わせたものとする。固定記憶装置808により使用される媒体は、取り外し可能なものでもよい。たとえば、取り外し可能なハードドライブは、固定記憶装置808に使用される。
【0118】
これらの例で、通信装置810は、他のデータ処理システムまたは装置との通信を提供する。この例では、通信装置810は、ネットワーク・インターフェースカードとする。通信ユニット810は、物理及び無線通信リンクのどちらか一方またはその両方を使用して、通信を提供する。
【0119】
入力/出力装置812により、データ処理システム800と接続される他の装置とのデータの入力及び出力が可能になる。たとえば、入力/出力装置812は、キーボード、マウス、及び/または他の適する入力装置を介して、ユーザ入力のための接続を提供する。さらに、入力/出力ユニット812は、プリンタに出力する。ディスプレー814は、ユーザに情報を表示する機構を提供する。
【0120】
オペレーションシステム、アプリケーション、及び/またはプログラムについての指示は、記憶装置816に格納されており、通信構造802を介してプロセッサユニット804と通信している。これらの実施例において、指示は、固定記憶装置808上で機能的形式であるとする。これらの指示は、プロセッサ装置804により実行されるように、メモリ806に読み込まれる。別の実施形態の工程は、コンピュータ実行指示を使用して、プロセッサ装置804により実行され、たとえばメモリ806などのメモリに読み込まれる。
【0121】
これらの指示は、プログラムコード、コンピュータユーザブルプログラムコード、またはコンピュータ可読プロブラムコードとも呼ばれ、プロセッサ装置804でプロセッサにより読み込まれ実行される。別の実施形態のプログラムコードは、たとえばメモリ806または固定記憶装置808などの様々な物理またはコンピュータ可読記憶媒体上で、具体化される。
【0122】
プログラムコード818は、選択的に取り外し可能で、プロセッサ装置804により実行するためのデータ処理システム800上に読み込まれるまたは転送されるコンピュータ可読媒体820上で、機能形式で配置される。これらの例では、プログラムコード818及びコンピュータ可読媒体820は、コンピュータプログラム製品822を形成する。一つの例では、コンピュータ可読媒体820は、コンピュータ可読記憶媒体824またはコンピュータ可読信号媒体826とする。コンピュータ可読記憶媒体824は、たとえば、ハードドライブのように、固定記憶装置808の一部である記憶装置への転送用の、固定記憶装置808の一部であるドライブまたは他の装置へ、挿入または配置される光または磁気ディスクを備える。
【0123】
コンピュータ可読記憶媒体824は、たとえば、ハードドライブ、サムドライブ、またはフラッシュメモリなどの固定記憶装置の形式をとり、データ処理システム800に接続される。コンピュータ可読記憶媒体824には、データ処理システム800から取り外し可能でないものもある。これらの例では、コンピュータ可読記憶媒体824は、プログラムコード818を伝搬または伝送する媒体というよりはむしろ、プログラムコード818を記憶するために使用される物理または実体記憶装置とする。コンピュータ可読記憶媒体824は、コンピュータ可読実体記憶装置、またはコンピュータ可読物理記憶装置ともよばれる。要するに、コンピュータ可読記憶媒体824は、人に触れられる媒体である。
【0124】
もう一つの方法として、プログラムコード818は、コンピュータ可読信号媒体826を使用し、データ処理システム800に転送される。コンピュータ可読信号媒体826は、たとえば、プログラムコード818を備える、伝搬されたデータ信号とする。たとえば、コンピュータ可読信号媒体826は、電磁気信号、光信号、及び/または他の適する種類の信号とする。これらの信号は、たとえば無線通信リンク、光ファイバーケーブル、同軸ケーブル、ワイヤー、及び/または他の適する種類の通信リンクなどの通信リンクで伝送される。要するに、通信リンク及び/または接続は、この実施例において、物理的なものまたは無線であるとする。
【0125】
好適な実施形態では、プログラムコード818は、データ処理システム800内で使用するためのコンピュータ可読信号媒体826を介して、別の装置またはデータ処理システムから固定記憶装置808へ、ネットワーク上でダウンロードされる。たとえば、サーバデータ処理システム内のコンピュータ可読記憶媒体に記憶されたプログラムコードは、サーバからデータ処理システム800へネットワーク上でダウンロードされる。プログラムコード818を提供するデータ処理システムは、サーバコンピュータ、クライアントコンピュータ、またはプログラムコード818を記憶及び伝送できるその他の装置とする。
【0126】
データ処理システム800についての様々な構成要素は、様々な実施形態を実施する方法を構造的に限定するものではない。様々な好適な実施形態は、データ処理システム800について説明された構成要素に加え、またはそれらの代わりに、構成要素を備えるデータ処理システムにおいて、実施される。図8に示されるその他の構成要素は、示された実施例から変形することができる。様々な実施形態は、プログラムコードを実行できるどのようなハードウエア装置またはシステムを使用してでも実施される。一つの例として、データ処理システムは、無機成分と合成された有機成分を備え、及び/または人を除く有機成分全体から構成される。たとえば、記憶装置は有機半導体から構成される。
【0127】
別の実施例では、プロセッサ装置804は、特定の用途のために製造または構成される回路を備えるハードウエア装置の形式をとる。この種類のハードウエアは、操作を実行するための記憶装置からメモリに読み込まれるプログラムコードを必要とせずに、操作を実行する。
【0128】
たとえば、プロセッサ装置804がハードウエア装置の形式をとるときに、プロセッサ装置804は、回路システム、特定用途向け集積回路(ASIC)、プログラム可能理論装置、または任意の数の操作を実行する別の適する種類のハードウエアであるとする。プログラム可能理論装置とともに、装置は任意の数の操作を実行する。装置はその後に再構成され、または任意の数の操作を永続的に実行する。プログラム可能理論装置の例としては、たとえば、プログラム可能理論アレー、プログラム可能アレー理論、フィールドプログラム可能理論アレー、フィールドプログラム可能ゲートアレー、及び他の適するハードウエア装置が含まれる。様々な実施形態の工程はハードウエア装置で実施されるので、この種の実施とともに、プログラムコード818については省略される。
【0129】
さらに別の実施例では、プロセッサ装置804は、コンピュータやハードウエア装置内に見られるプロセッサの組み合わせを使用して実施される。プロセッサユニット804は、プログラムコード818を実行する任意の数のハードウエア装置及び任意の数のプロセッサを備える。この例によれば、任意の数のハードウエア装置で実施されている処理がある一方で、任意の数のプロセッサで実施されている処理もある。
【0130】
別の例では、バスシステムが通信構造802を実施するために使用され、且つ、そのバスシステムはシステムバスまたは入力/出力バスのような一または複数のバスから構成される。もちろん、バスシステムは、バスシステムに取り付けられる様々な構成要素または装置間でのデータ転送のために提供されるどんな種類の構造を使用してでも実施される。
【0131】
さらに、伝達装置は、データを伝送、受信、または送受信する任意の数の装置を備える。通信装置は、たとえば、モデムまたはネットワークアダプタ、二のネットワークアダプタ、またはそれらのいくつかの組み合わせとする。さらに、メモリは、たとえば、メモリ806、または、通信構造802内にあるインターフェース及びメモリコントローラハブに見られるような、キャッシュメモリとする。
【0132】
図面と上述の説明にしたがって、環境104で任意の数のモバイルプラットフォーム106についての位置特定情報117を生成する位置特定照合システム110、及び、位置特定照合システム110から任意の数のモバイルプラットフォーム106についての位置特定情報117を受信し、位置特定情報117を使用して任意の数のモバイルプラットフォームのための指令信号114を生成し、指令信号114を任意の数のモバイルプラットフォーム106に送信し、任意の数のモバイルプラットフォーム106の操作が任意の数の宇宙探査機システム101の操作をエミュレートするように環境104で任意の数のモバイルプラットフォーム106を操作する制御モジュール108を備える装置が開示される。
【0133】
一つの変形例では、装置は任意の数のモバイルプラットフォーム106をさらに備え、任意の数の複数の宇宙探査機システムが非地球上の陸上環境112で作動しているときに、任意の数の宇宙探査機システム101の操作をエミュレートするように、複数のモバイルプラットフォーム106は環境104の中で作動する。一つの例では、任意の数の宇宙探査機システム101は、第一の任意の数のシステム103を備え、及び任意の数のモバイルプラットフォーム106に関連付けられた第二の任意のシステム132をさらに備え、指令信号114が第二の任意の数のシステム132に送信されると、第二の任意の数のシステム132は非地球上の陸上環境112で第一の任意の数のシステム103の操作をエミュレートする。
【0134】
一つの変形例では、装置は、環境104で任意の数のモバイルプラットフォーム106についての位置特定情報117を記録するデータ管理モジュール130をさらに備える。別の例では、データ管理モジュール130は、任意の数のモバイルプラットフォーム106に関連付けられた第二の任意の数のシステム132により生成されるデータ135を記憶する。
【0135】
さらに別の変形例では、装置は、正常性監視情報138を任意の数のモバイルプラットフォーム106から受信し、受信した正常性監視情報138に基づき任意の数のモバイルプラットフォーム106についての正常性状態140を監視する正常性監視モジュール136をさらに備え、指令信号は、任意の数のモバイルプラットフォーム106についての正常性状態に基づき、制御モジュール108によって生成される。
【0136】
一つの代替手段では、指令信号114は第一の指令信号とし、制御モジュール108は、非地球上の陸上環境112で任意の数の宇宙探査機システム101に第二の指令信号114を送信し、非地球上の陸上環境112で任意の数の宇宙探査機システム101の操作を制御する。別の代替手段では、任意の数の宇宙探査機システム101の一は、少なくともソフトウエアまたはハードウエアを備え、任意の数の宇宙探査機システム101の一は、センサシステム、位置確認システム、カメラシステム、推進システム、スラスタシステム、ドッキングシステム、着陸システム、移動システム、電力システム、通信システム、及び制御システムの一から選択される。
【0137】
一つの例では、第一の任意の数のシステム103は、少なくともソフトウエアまたはハードウエアを備え、第一の任意の数のシステム103及び第二の任意の数のシステム132の一は、センサシステム、位置確認システム、カメラシステム、推進システム、スラスタシステム、ドッキングシステム、着陸システム、移動システム、制御システム、電力システム、及び通信システムの一つから選択される。別の例では、任意の数の宇宙探査機システム101の一は、宇宙車両、衛星、スペースシャトル、惑星着陸車両、軌道宇宙探査機、地球周回軌道宇宙探査機、有人宇宙探査機、無人宇宙探査機、宇宙ステーション、ロケット、宇宙ミサイル、宇宙探測機、宇宙ロボット、宇宙服、宇宙プラットフォーム、宇宙装置、及び宇宙組立品の一から選択される。
【0138】
別の態様では、非地球上の陸上環境112で任意の数の宇宙探査機システム101の操作をエミュレートするように環境104内で作動する任意の数のモバイルプラットフォーム106、及び環境104で任意の数のモバイルプラットフォーム106についての位置特定情報117を生成する位置特定照合システム110を備える、任意の数の宇宙探査機システム101の開発及び検査システムが開示される。また、システムは、任意の数のモバイルプラットフォーム106から正常性監視情報138を受信し、受信した正常性監視情報138を使用して任意の数のモバイルプラットフォーム106についての正常性状態140を監視する正常性監視モジュール136と、位置特定照合システム110から任意の数のモバイルプラットフォーム106についての位置特定情報117を受信し、任意の数のモバイルプラットフォーム106についての位置特定情報117及び正常性状態を使用して任意の数のモバイルプラットフォーム106のための指令信号114を生成し、指令信号114を任意の数のモバイルプラットフォーム106に送信し、任意の数のモバイルプラットフォーム106の操作が非地球上の陸上環境112で任意の数の宇宙探査機システムの操作をエミュレートするように、環境104で任意の数のモバイルプラットフォーム106を操作する制御モジュール108を備える。また、システムは、環境104で任意の数のモバイルプラットフォーム106についての位置特定情報117を記録するデータ管理モジュール130を備える。
【0139】
一つの変形例では、任意の数の宇宙探査機システム101は、第一の任意の数のシステム103を備え、及び任意の数のモバイルプラットフォーム106に関連付けられた第二の任意の数のシステム132をさらに備え、指令信号114は第二の任意の数のシステム132に送信され、第一の任意の数のシステム103が非地球上の陸上環境112で作動するときに、第二の任意の数のシステム132は第一の任意の数のシステム103の操作をエミュレートする。
【0140】
一つの例では、任意の数の宇宙探査機システム101の一は、宇宙車両、衛星、スペースシャトル、惑星着陸車両、軌道宇宙探査機、地球周回軌道宇宙探査機、有人宇宙探査機、無人宇宙探査機、宇宙ステーション、ロケット、宇宙ミサイル、宇宙探測機、宇宙ロボット、宇宙服、宇宙プラットフォーム、宇宙装置、及び宇宙組立品の一つから選択される。
【0141】
別の態様では、ある環境で任意の数のモバイルプラットフォーム106についての位置特定情報117を受信し、位置特定情報は位置特定照合システムを使用して生成されること、位置特定情報117を使用して任意の数のモバイルプラットフォーム106のための指令信号114を生成すること、及び指令信号114を任意の数のモバイルプラットフォーム106に送信し、任意の数のモバイルプラットフォーム106の操作が任意の数の宇宙探査機システム101の操作をエミュレートするように、環境104で任意の数のモバイルプラットフォーム104を操作することを含む、任意の数の宇宙探査機システム101を検査する方法が開示される。
【0142】
一つの変形例では、任意の数の宇宙探査機システム101は、第一の任意の数のシステム103を備え、指令信号114を任意の数のモバイルプラットフォーム106に送信することは、任意の数のモバイルプラットフォーム106に関連付けられた第二の任意の数のシステム132に指令信号114を送信し、非地球上の陸上環境で、第二の任意の数のシステム132が第一の任意の数のシステム103の操作をエミュレートすることを含む。一つの例では、方法は、環境104で任意の数のモバイルプラットフォーム106についての位置特定情報117を記録することを含む。さらに別の例では、方法は、任意の数のモバイルプラットフォーム106が環境104を移動している一方で、第二の任意の数のシステム132の操作中に第二の任意の数のシステム132により生成されるデータ135を記憶することをさらに含む。
【0143】
別の変形例では、方法は、任意の数のモバイルプラットフォーム106から正常性監視情報138を受信すること、及び受信した正常性監視情報138に基づき、任意の数のモバイルプラットフォーム106についての正常性状態140を監視することをさらに含み、指令信号114を生成するステップは、任意の数のモバイルプラットフォーム106についての位置特定情報117及び正常性状態140を使用して、指令信号114を生成することを含む。さらに別の変形例では、指令信号114は、第一の指令信号とし、非地球上の陸上環境112で任意の数の宇宙探査機システム101に第二の指令信号114を送信し、非地球上の陸上環境112で任意の数の宇宙探査機システム101の操作を制御することをさらに含む。
【0144】
一つの例では、任意の数の宇宙探査機システム101の一は、宇宙車両、衛星、スペースシャトル、惑星着陸機、軌道宇宙探査機、地球周回軌道宇宙探査機、有人宇宙探査機、無人宇宙探査機、宇宙ステーション、ロケット、宇宙ミサイル、宇宙探測機、宇宙ロボット、宇宙服、宇宙プラットフォーム、宇宙装置、及び宇宙組立品の一から選択される。
【0145】
それゆえ、様々な好適な実施形態は、制御された環境で作動する任意の数のモバイルプラットフォームを使用して、宇宙探査機及び/または宇宙探査機システムの検査のための方法及び装置を提供する。一つの好適な実施形態では、装置は、位置特定照合システム及び制御モジュールを備える。位置特定照合システムは、ある環境で任意の数のモバイルプラットフォームについての位置特定情報を生成する。制御モジュールは、位置特定照合システムから、任意の数のモバイルプラットフォームについての位置特定情報を受信する。
【0146】
制御モジュールは、位置特定情報を使用し、任意の数のモバイルプラットフォームのための指令信号をさらに生成する。制御モジュールは、任意の数のモバイルプラットフォームに指令信号を送信し、任意の数のモバイルプラットフォームの操作が任意の数の宇宙探査機システムの操作をエミュレートするように、その環境で任意の数のモバイルプラットフォームを操作する。
【0147】
この方法において、様々な好適な実施形態が、宇宙探査機及び/または宇宙に打ち上げられる必要のない宇宙探査機システムの検査を実行するシステムを提供する。さらに、このシステムにより、要求される以上に時間がかかる、シミュレーションの実施及び/または完全に機能し完全に組み立てられた試作品の検査をせずに、宇宙探査機及び/または宇宙探査機のシステムの検査が可能になる。この結果、宇宙探査機及び/または宇宙探査機システムの検査に必要な時間、労力、資源の加工、及び/または費用が削減される。
【0148】
本明細書に記載の様々な好適な実施形態は、例示のみを目的として提供されており、開示されている特定の実施形態に限定されるものではない。本発明が属する技術分野の当業者には、多数の変更例や変形例が自明であろう。さらに、異なる好適な実施形態は、他の好適な実施形態とは異なる利益をもたらす。その原理及び実用化を最良に説明する目的、及び、特定の使用に適するよう様々な変更例を伴う様々な実施形態の開示が当業者に理解される目的で、本実施形態が選択及び説明されている。
【符号の説明】
【0149】
200 ロボット車両
300 任意の数のモバイルプラットフォーム
302、304 ロボット車両
306 環境
308 表面
400 検査システム
402 環境
404 制御モジュール
406 位置特定照合システム
408 データステーション
410 コンピュータ
412 通信リンク
414 検査車両
416 領域
418 モーションキャプチャシステム
420 モーションキャプチャ装置
424 複数の逆反射マーカー
500 検査システム
502 環境
504 指令及び制御ステーション
506 位置特定参照システム
508 検査車両
510 コンピュータシステム
512 制御モジュール
514 複数のカメラ
516、518 ロボット車両
522 センサシステム
【特許請求の範囲】
【請求項1】
環境(104)で任意の数のモバイルプラットフォーム(106)についての位置特定情報(117)を生成する位置特定照合システム(110)、及び
任意の数のモバイルプラットフォーム(106)についての位置特定情報(117)を位置特定照合システム(110)から受信し、位置特定情報(117)を使用して任意の数のモバイルプラットフォームのための指令信号(114)を生成し、指令信号(114)を任意の数のモバイルプラットフォーム(106)に送信し、任意の数のモバイルプラットフォーム(106)の操作が任意の数の宇宙探査機システム(101)の操作をエミュレートするように、環境(104)で任意の数のモバイルプラットフォーム(106)を操作する制御モジュール(108)
を備える装置。
【請求項2】
任意の数のモバイルプラットフォーム(106)をさらに備え、任意の数のモバイルプラットフォーム(106)は環境(104)内で作動し、任意の数の宇宙探査機システムが非地球上の陸上環境(112)で作動しているときに、任意の数の宇宙探査機システム(101)の操作をエミュレートする、請求項1に記載の装置。
【請求項3】
任意の数の宇宙探査機システム(101)は、第一の任意の数のシステム(103)を備え、且つ、
任意の数のモバイルプラットフォーム(106)に関連付けられた第二の任意の数のシステム(132)をさらに備え、指令信号(114)が第二の任意の数のシステム(132)に送信されると、第二の任意の数のシステム(132)は非地球上の陸上環境(112)で前記第一の任意の数のシステム(103)の操作をエミュレートする、請求項2に記載の装置。
【請求項4】
環境(104)で任意の数のモバイルプラットフォーム(106)についての位置特定情報(117)を記録するデータ管理モジュール(130)をさらに備える、請求項1乃至3のいずれか一項に記載の装置。
【請求項5】
データ管理モジュール(130)は、任意の数のモバイルプラットフォーム(106)に関連付けられた第二の任意の数のシステム(132)によって生成されるデータ(135)を記憶する、請求項4に記載の装置。
【請求項6】
正常性監視情報(138)を任意の数のモバイルプラットフォーム(106)から受信し、受信した正常性監視情報(138)に基づき任意の数のモバイルプラットフォーム(106)についての正常性状態(140)を監視する正常性監視モジュール(136)をさらに備え、指令信号は、任意の数のモバイルプラットフォーム(106)についての正常性状態に基づき、制御モジュール(108)によって生成される、請求項1乃至5のいずれか一項に記載の装置。
【請求項7】
指令信号(114)は第一の指令信号とし、制御モジュール(108)は、非地球上の陸上環境(112)の任意の数の宇宙探査機システム(101)に第二の指令信号(114)を送信し、非地球上の陸上環境(112)で任意の数の宇宙探査機システム(101)の操作を制御する、請求項2または3に記載の装置。
【請求項8】
任意の数の宇宙探査機システム(101)のシステムは少なくともソフトウエアまたはハードウエアを備え、任意の数の宇宙探査機システム(101)のシステムは、センサシステム、位置確認システム、カメラシステム、推進システム、スラスタシステム、ドッキングシステム、着陸システム、移動システム、電力システム、通信システム、及び制御システムの一から選択される、請求項1乃至7のいずれか一項に記載の装置。
【請求項9】
第一の任意の数のシステム(103)は少なくともソフトウエアまたはハードウエアを備え、第一の任意の数のシステム(103)及び第二の任意の数のシステム(132)のシステムは、センサシステム、位置確認システム、カメラシステム、推進システム、スラスタシステム、ドッキングシステム、着陸システム、移動システム、制御システム、電力システム、及び通信システムの一から選択される、請求項3に記載の装置。
【請求項10】
任意の数の宇宙探査機システム(101)の一は、宇宙車両、衛星、スペースシャトル、惑星着陸車両、軌道宇宙探査機、地球周回軌道宇宙探査機、有人宇宙探査機、無人宇宙探査機、宇宙ステーション、ロケット、宇宙ミサイル、宇宙探測機、宇宙ロボット、宇宙服、宇宙プラットフォーム、宇宙装置、及び宇宙組立品の一から選択されることを特徴とする請求項1乃至9のいずれか一項に記載の装置。
【請求項11】
任意の数の宇宙探査機システム(101)を検査するための方法は、
環境(104)で任意の数のモバイルプラットフォーム(106)についての位置特定情報(117)を受信し、位置特定情報は、位置特定照合システムを使用して生成されることと、
位置特定情報(117)を使用して任意の数のモバイルプラットフォーム(106)のための指令信号(114)を生成すること、及び
任意の数のモバイルプラットフォーム(106)に指令信号(114)を送信し、任意の数のモバイルプラットフォーム(106)の操作が任意の数の宇宙探査機システム(101)の操作をエミュレートするように、環境(104)で任意の数のモバイルプラットフォームを操作することと
を含む方法。
【請求項12】
任意の数の宇宙探査機システム(101)は第一の任意の数のシステム(103)を備え、指令信号(114)を任意の数のモバイルプラットフォーム(106)に送信することは、指令信号(114)を任意の数のモバイルプラットフォーム(106)に関連付けられた第二の任意の数のシステム(132)に送信し、第二の任意の数のシステム(132)が、非地球上の陸上環境(112)で第一の任意の数のシステム(103)の操作をエミュレートすることを含む、請求項11に記載の方法。
【請求項13】
環境(104)で任意の数のモバイルプラットフォーム(106)についての位置特定情報(117)を記録することをさらに含む、請求項11に記載の方法。
【請求項14】
任意の数のモバイルプラットフォーム(106)が環境(104)で移動している一方で、第二の任意の数のシステム(132)の作動中に第二の任意の数のシステム(132)により生成されるデータ(135)を記憶することをさらに含む、請求項12に記載の方法。
【請求項15】
任意の数のモバイルプラットフォーム(106)から正常性監視情報(138)を受信すること、及び
受信した正常性監視情報(138)に基づき、任意の数のモバイルプラットフォーム(106)について正常性状態(140)を監視すること
をさらに含み、
指令信号(114)を生成することは、任意の数のモバイルプラットフォーム(106)についての位置特定情報(117)及び正常性状態(140)を使用して、指令信号(114)を生成することを含む、請求項11乃至14のいずれか一項に記載の方法。
【請求項1】
環境(104)で任意の数のモバイルプラットフォーム(106)についての位置特定情報(117)を生成する位置特定照合システム(110)、及び
任意の数のモバイルプラットフォーム(106)についての位置特定情報(117)を位置特定照合システム(110)から受信し、位置特定情報(117)を使用して任意の数のモバイルプラットフォームのための指令信号(114)を生成し、指令信号(114)を任意の数のモバイルプラットフォーム(106)に送信し、任意の数のモバイルプラットフォーム(106)の操作が任意の数の宇宙探査機システム(101)の操作をエミュレートするように、環境(104)で任意の数のモバイルプラットフォーム(106)を操作する制御モジュール(108)
を備える装置。
【請求項2】
任意の数のモバイルプラットフォーム(106)をさらに備え、任意の数のモバイルプラットフォーム(106)は環境(104)内で作動し、任意の数の宇宙探査機システムが非地球上の陸上環境(112)で作動しているときに、任意の数の宇宙探査機システム(101)の操作をエミュレートする、請求項1に記載の装置。
【請求項3】
任意の数の宇宙探査機システム(101)は、第一の任意の数のシステム(103)を備え、且つ、
任意の数のモバイルプラットフォーム(106)に関連付けられた第二の任意の数のシステム(132)をさらに備え、指令信号(114)が第二の任意の数のシステム(132)に送信されると、第二の任意の数のシステム(132)は非地球上の陸上環境(112)で前記第一の任意の数のシステム(103)の操作をエミュレートする、請求項2に記載の装置。
【請求項4】
環境(104)で任意の数のモバイルプラットフォーム(106)についての位置特定情報(117)を記録するデータ管理モジュール(130)をさらに備える、請求項1乃至3のいずれか一項に記載の装置。
【請求項5】
データ管理モジュール(130)は、任意の数のモバイルプラットフォーム(106)に関連付けられた第二の任意の数のシステム(132)によって生成されるデータ(135)を記憶する、請求項4に記載の装置。
【請求項6】
正常性監視情報(138)を任意の数のモバイルプラットフォーム(106)から受信し、受信した正常性監視情報(138)に基づき任意の数のモバイルプラットフォーム(106)についての正常性状態(140)を監視する正常性監視モジュール(136)をさらに備え、指令信号は、任意の数のモバイルプラットフォーム(106)についての正常性状態に基づき、制御モジュール(108)によって生成される、請求項1乃至5のいずれか一項に記載の装置。
【請求項7】
指令信号(114)は第一の指令信号とし、制御モジュール(108)は、非地球上の陸上環境(112)の任意の数の宇宙探査機システム(101)に第二の指令信号(114)を送信し、非地球上の陸上環境(112)で任意の数の宇宙探査機システム(101)の操作を制御する、請求項2または3に記載の装置。
【請求項8】
任意の数の宇宙探査機システム(101)のシステムは少なくともソフトウエアまたはハードウエアを備え、任意の数の宇宙探査機システム(101)のシステムは、センサシステム、位置確認システム、カメラシステム、推進システム、スラスタシステム、ドッキングシステム、着陸システム、移動システム、電力システム、通信システム、及び制御システムの一から選択される、請求項1乃至7のいずれか一項に記載の装置。
【請求項9】
第一の任意の数のシステム(103)は少なくともソフトウエアまたはハードウエアを備え、第一の任意の数のシステム(103)及び第二の任意の数のシステム(132)のシステムは、センサシステム、位置確認システム、カメラシステム、推進システム、スラスタシステム、ドッキングシステム、着陸システム、移動システム、制御システム、電力システム、及び通信システムの一から選択される、請求項3に記載の装置。
【請求項10】
任意の数の宇宙探査機システム(101)の一は、宇宙車両、衛星、スペースシャトル、惑星着陸車両、軌道宇宙探査機、地球周回軌道宇宙探査機、有人宇宙探査機、無人宇宙探査機、宇宙ステーション、ロケット、宇宙ミサイル、宇宙探測機、宇宙ロボット、宇宙服、宇宙プラットフォーム、宇宙装置、及び宇宙組立品の一から選択されることを特徴とする請求項1乃至9のいずれか一項に記載の装置。
【請求項11】
任意の数の宇宙探査機システム(101)を検査するための方法は、
環境(104)で任意の数のモバイルプラットフォーム(106)についての位置特定情報(117)を受信し、位置特定情報は、位置特定照合システムを使用して生成されることと、
位置特定情報(117)を使用して任意の数のモバイルプラットフォーム(106)のための指令信号(114)を生成すること、及び
任意の数のモバイルプラットフォーム(106)に指令信号(114)を送信し、任意の数のモバイルプラットフォーム(106)の操作が任意の数の宇宙探査機システム(101)の操作をエミュレートするように、環境(104)で任意の数のモバイルプラットフォームを操作することと
を含む方法。
【請求項12】
任意の数の宇宙探査機システム(101)は第一の任意の数のシステム(103)を備え、指令信号(114)を任意の数のモバイルプラットフォーム(106)に送信することは、指令信号(114)を任意の数のモバイルプラットフォーム(106)に関連付けられた第二の任意の数のシステム(132)に送信し、第二の任意の数のシステム(132)が、非地球上の陸上環境(112)で第一の任意の数のシステム(103)の操作をエミュレートすることを含む、請求項11に記載の方法。
【請求項13】
環境(104)で任意の数のモバイルプラットフォーム(106)についての位置特定情報(117)を記録することをさらに含む、請求項11に記載の方法。
【請求項14】
任意の数のモバイルプラットフォーム(106)が環境(104)で移動している一方で、第二の任意の数のシステム(132)の作動中に第二の任意の数のシステム(132)により生成されるデータ(135)を記憶することをさらに含む、請求項12に記載の方法。
【請求項15】
任意の数のモバイルプラットフォーム(106)から正常性監視情報(138)を受信すること、及び
受信した正常性監視情報(138)に基づき、任意の数のモバイルプラットフォーム(106)について正常性状態(140)を監視すること
をさらに含み、
指令信号(114)を生成することは、任意の数のモバイルプラットフォーム(106)についての位置特定情報(117)及び正常性状態(140)を使用して、指令信号(114)を生成することを含む、請求項11乃至14のいずれか一項に記載の方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−23215(P2013−23215A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【外国語出願】
【出願番号】特願2012−152610(P2012−152610)
【出願日】平成24年7月6日(2012.7.6)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.イーサネット
【出願人】(500520743)ザ・ボーイング・カンパニー (773)
【氏名又は名称原語表記】The Boeing Company
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2012−152610(P2012−152610)
【出願日】平成24年7月6日(2012.7.6)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.イーサネット
【出願人】(500520743)ザ・ボーイング・カンパニー (773)
【氏名又は名称原語表記】The Boeing Company
[ Back to top ]