
宇宙機運動シミュレータ

【課題】宇宙機の広帯域に亘る軌道運動を高精度に模擬する宇宙機運動シミュレータを得る。
【解決手段】宇宙機運動シミュレータは、宇宙機の構体を模擬した宇宙機模擬構体を固定する定盤と、宇宙機模擬構体の上に設置されるとともに観測機器を3軸並進運動並びに3軸回転運動を可能とする機構を有する駆動観測機器と、駆動観測機器のフィードバック制御を行うために取り付けられた駆動観測機器用加速度センサユニットと、を備え、宇宙機模擬構体の上に設置されるとともに6自由度且つ複数の周波数の微小振動を発生させる加振装置と、駆動観測機器用加速度センサユニットの加速度検出量からセンサノイズを除去し、且つセンサノイズ除去後の加速度検出量から駆動観測機器の駆動モータに起因する外乱を検出するともに加振装置の駆動による擾乱を推定する運動分離部と、を備える。
【解決手段】宇宙機運動シミュレータは、宇宙機の構体を模擬した宇宙機模擬構体を固定する定盤と、宇宙機模擬構体の上に設置されるとともに観測機器を3軸並進運動並びに3軸回転運動を可能とする機構を有する駆動観測機器と、駆動観測機器のフィードバック制御を行うために取り付けられた駆動観測機器用加速度センサユニットと、を備え、宇宙機模擬構体の上に設置されるとともに6自由度且つ複数の周波数の微小振動を発生させる加振装置と、駆動観測機器用加速度センサユニットの加速度検出量からセンサノイズを除去し、且つセンサノイズ除去後の加速度検出量から駆動観測機器の駆動モータに起因する外乱を検出するともに加振装置の駆動による擾乱を推定する運動分離部と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、宇宙機の軌道運動を地上で模擬するための宇宙機運動シミュレータに関するものである。
【背景技術】
【0002】
宇宙機の軌道上でのダイナミクスを地上で模擬するための装置は、アッパープレートとベースプレートを6つの2リンクアームによって結合し、ベースプレートと2リンクアームとの各結合部分にそれぞれ回転型アクチュエータを装着し、各回転型アクチュエータを駆動することによってアッパープレートの位置と姿勢を自由に変更することを可能とする宇宙機支持機構と、アッパープレート上の宇宙機ダイナミクスモデルに加わる6自由度の力を検出する力検出器をもとに各回転型アクチュエータへの指令を生成する宇宙機支持機構制御器を具備することにより、宇宙機の軌道上ダイナミクスを6自由度全てに対して模擬試験を実施することを可能とするものである(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平7−187100号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、宇宙機の軌道運動を地上で模擬し、評価試験を行うための宇宙機運動シミュレータにおいて、宇宙機の6自由度運動を実現するため、3軸並進方向の可動部材と3軸周りの回転用モータを必要とする。その結果、各モータを駆動した際に、モータ駆動に起因する外乱の発生により、実際の宇宙機には無い力/トルクが付加され、模擬すべき運動とは厳密に異なる運動となってしまうという問題点がある。
また、近年、宇宙機ミッションの高度化に伴い、高い指向安定度の要求が高まっており、これまで無視できていた各搭載機器に起因する高周波の微小振動の影響が無視できなくなり、従来の構成では宇宙機の軌道運動の模擬精度が低いという問題点がある。
【0005】
この発明は、前記のような課題を解決するためになされたものであり、宇宙機の広帯域に亘る軌道運動を高精度に模擬する宇宙機運動シミュレータを得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明に係る宇宙機運動シミュレータは、宇宙機の構体を模擬した宇宙機模擬構体を固定する定盤と、該宇宙機模擬構体の上に設置されるとともに観測機器を3軸並進運動並びに3軸回転運動を可能とする機構を有する駆動観測機器と、上記駆動観測機器のフィードバック制御を行うために取り付けられた駆動観測機器用加速度センサユニットと、を備える宇宙機運動シミュレータにおいて、該宇宙機模擬構体の上に設置されるとともに6自由度且つ複数の周波数の微小振動を発生させるスチュワートプラットフォーム機構の加振装置と、上記駆動観測機器用加速度センサユニットの加速度検出量からセンサノイズを除去し、且つセンサノイズ除去後の加速度検出量から上記駆動観測機器の駆動モータに起因する外乱を検出するともに上記加振装置の駆動による擾乱を推定する運動分離部と、を備える。
【発明の効果】
【0007】
この発明に係る宇宙機運動シミュレータは、運動分離部にて駆動観測機器の駆動モータに起因する外乱の推定を行い、推定した外乱を加振装置で積極的に除去すると同時に、加振装置の駆動により各搭載機器に起因する高周波の微小振動を模擬することができるため、宇宙機の広帯域における軌道運動を高精度に模擬することができるという効果がある。
【図面の簡単な説明】
【0008】
【図1】本発明の実施の形態1に係る宇宙機運動シミュレータの構成を示す図である。
【図2】加振装置をスチュワートプラットフォーム機構としたときの構成図である。
【図3】周辺を含む図1の運動分離部の機能ブロック図である。
【図4】本発明の実施の形態2に係る宇宙機運動シミュレータの構成を示す図である。
【図5】周辺を含む図4の運動分離部の機能ブロック図である。
【図6】本発明の実施の形態3に係る宇宙機運動シミュレータの構成を示す図である
【図7】本発明の実施の形態4に係る宇宙機運動シミュレータの構成を示す図である
【図8】周辺を含む図7の運動分離部の機能ブロック図である。
【図9】この発明の実施の形態5に係る宇宙機運動シミュレータの周辺を含む運動分離部の機能ブロック図である。
【発明を実施するための形態】
【0009】
以下、本発明の宇宙機運動シミュレータの好適な実施の形態につき図面を用いて説明する。
実施の形態1.
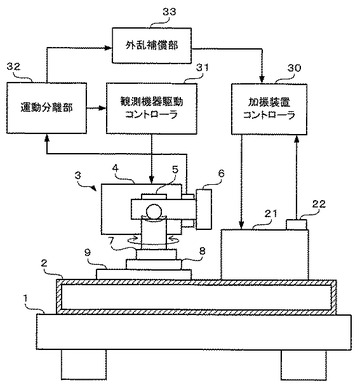
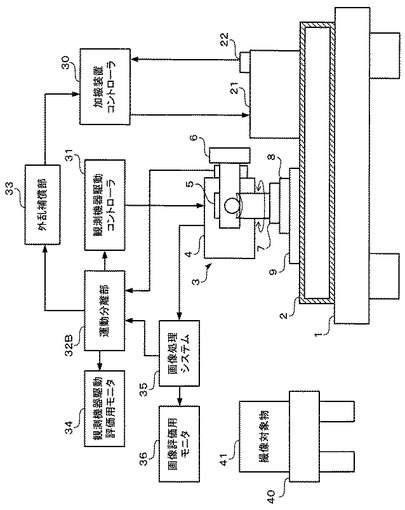
図1は、本発明の実施の形態1に係る宇宙機運動シミュレータの構成を示す図である。 本発明の実施の形態1に係る宇宙機運動シミュレータは、宇宙機の構体を模擬した宇宙機模擬構体2を上に固定される定盤1と、宇宙機模擬構体2の上に設置されるとともに宇宙機の6自由度の軌道運動を模擬するための駆動観測機器3と、定盤1の上に固定された宇宙機模擬構体2の上に配置される加振装置21と、を備える。
【0010】
また、本発明の実施の形態1に係る宇宙機運動シミュレータは、駆動観測機器3に起因する外乱の推定と加振装置21による模擬擾乱の検出を行うとともに駆動観測機器3に起因する外乱と加振装置21による模擬擾乱と観測機器駆動による運動の3つの運動を分離する運動分離部32と、観測機器駆動による運動分の加速度成分を元に駆動観測機器3への指令信号を生成する観測機器駆動コントローラ31と、外乱の推定値を元に駆動モータの外乱を積極的に打ち消すための指令値を生成するモータ外乱補償部33と、生成した指令値に基づいて加振装置21を加振する加振装置コントローラ30と、を備える。
【0011】
駆動観測機器3は、観測機器4と、観測機器4のピッチ軸周りの回転制御が可能な第一回転機構部5と、ロール軸周りの回転制御が可能な第二回転機構部6と、ヨー軸周りの回転制御が可能な第三回転機構部7と、水平方向の並進変位の制御を可能とする第一並進機構部8および第二並進機構部9と、垂直方向の変位を制御可能な第三並進機構部10と、を備え、モータ駆動により並進3自由度と回転3自由度の運動を可能とする。
【0012】
観測機器4は、宇宙機に望まれる固有のミッションを遂行するための機器であり、可視カメラや赤外カメラ、アンテナなどでもよい。
駆動観測機器3には、駆動観測機器3の検出器に近い位置に駆動観測機器用加速度センサユニット11が設けられており、基本的には駆動観測機器用加速度センサユニット11の検出量を元に各軸のモータのフィードバック制御を行う。
駆動観測機器3の駆動により、観測機器4の観測対象物と宇宙機の相対位置および姿勢を地上で再現することができるため、静止軌道や地球周回軌道など軌道を限定することなく、様々な軌道上での宇宙機の運動を模擬することができる。
【0013】
従来の例えば特許文献1のような宇宙機の6自由度運動を模擬する構成の場合、宇宙機モデル本体を駆動部材により支持し駆動させるため、数Hz〜10数Hz程度の低周波数の運動に限定されていた。近年の宇宙機ミッションは、小型衛星や大型衛星問わず、高い指向安定度が要求されるようになっており、これまで問題にならなかったアンテナ、リアクションホイール、慣性基準装置などの各搭載機器の駆動により発生する微小振動(以下、擾乱という)の影響が無視できなくなってきている。これらの擾乱の周波数成分の多くは、10数Hz以上の高周波である。
【0014】
地上での軌道運動に関する評価試験装置においても、軌道上の宇宙機の運動を高精度に模擬する必要性が生じてきており、宇宙機の低周波の運動のみならず、宇宙機の各搭載機器から発生する高周波の擾乱による宇宙機の運動への影響も考慮する必要がある。
そのために、駆動観測機器3とは別に加振装置21を、定盤1の上に固定された宇宙機模擬構体2の上に配置している。
【0015】
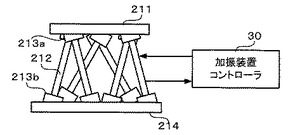
図2は、加振装置21をスチュワートプラットフォーム機構としたときの構成図を示す。
加振装置21は、6自由度・複数周波数の加振力/トルクを発生することが可能な装置であり、スチュワートプラットフォーム機構型加振装置の場合、可動マス211と、6本のアクチュエータリンク212と、ベースプレート214と、から構成され、6本のアクチュエータリンク212を並列に組み合わせて可動マス211を支持する形をとる。
アクチュエータリンク212は、積層型の圧電素子をアクチュエータとした積層圧電アクチュエータと、積層圧電アクチュエータの両端に取付けられた多自由度の回転ジョイント213a、213bと、積層圧電アクチュエータに取り付けられた歪ゲージセンサと、から構成され、歪ゲージセンサからの歪データを用いたフィードバック制御により積層圧電アクチュエータの持つ非線形性とヒステリシスを排除する。
【0016】
また、可動マス211に取り付けられた加振装置用加速度センサユニット22により各自由度の加速度を検出し、加振装置用加速度センサユニット22から検出された各自由度の加速度を元に、出力すべき加振力/トルクを算出し、加振装置21に対する指令信号を加振装置コントローラ30にて生成する。
この構成により、スチュワートプラットフォーム機構の最大の利点である高剛性且つ高精度な6自由度運動を実現することができるという特徴を生かし、宇宙機の各搭載機器から発生する6自由度で且つ複数の周波数の高周波の擾乱を高精度に模擬することができる。
尚、加振装置21としてスチュワートプラットフォーム機構を適用したが、これに限らずに6自由度で且つ複数の周波数の高周波の振動を加振するものであれば良い。
【0017】
加振装置21の駆動によって発生した加振力/トルクは宇宙機模擬構体2を経由して駆動観測機器3に伝達され、駆動観測機器用加速度センサユニット11にて加振装置21に起因する6自由度の加速度が検出される。ここで、宇宙機模擬構体2はアルミなどの金属板をロの字型、もしくは中が空洞の箱型に加工したものである。宇宙機模擬構体12の寸法と厚さに関しては、駆動観測機器3および加振装置21が取り付けられる上面の金属板が、伝達させたい振動周波数で共振するモードが存在するように有限要素法解析を用いて設計を行う。設計条件としては、四辺固定の板の上に駆動観測機器3と加振装置21の二つの荷重が加わった状態とする。駆動観測機器3と加振装置21の配置の位置も有限要素法解析を用いることで、金属板の共振周波数が伝達させたい振動周波数となるように設計される。
この構成により、例えば観測機器4の検出器や光学系の主鏡、副鏡など宇宙機のミッション機器における擾乱の要求が厳しい部分の擾乱力/トルクの要求値、支配的な擾乱周波数が既知である場合は、その擾乱レベルを正確に模擬することができ、擾乱要求値の妥当性を実機で検証することができる。
【0018】
駆動観測機器用加速度センサユニット11の検出量には、加振装置21の駆動による加速度成分に加えて、加速度センサの持つセンサノイズやコギングトルクやトルクリップルなど駆動観測機器3の駆動モータに起因する外乱を含む可能性がある。
そこで、駆動観測機器用加速度センサユニット11の検出量からセンサノイズを除去し、センサノイズを除去後の加速度検出量から駆動モータに起因する外乱の推定と加振装置21による模擬擾乱の検出を行い、駆動モータに起因する外乱と加振装置21による模擬擾乱と観測機器駆動による運動の3つの運動を分離する運動分離部32を備える。
【0019】
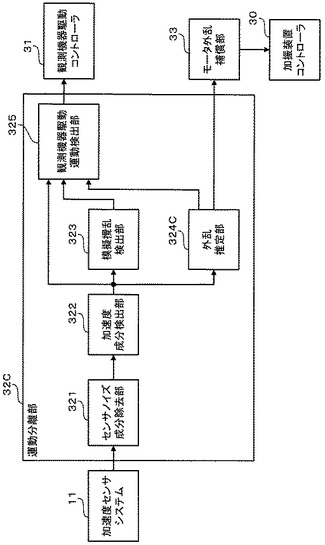
図3は、周辺を含む運動分離部32の機能ブロック図である。
まず、センサノイズ成分除去部321において、6自由度分の駆動観測機器用加速度センサユニット11からの検出量にローパスフィルタによるフィルタリングを施して検出量から高周波成分を除去する。加速度成分検出部322において、センサノイズを除去した検出量から加速度成分を検出する。模擬擾乱検出部323において、加速度成分から加振装置21による模擬擾乱を検出する。外乱推定部324において、加速度成分から駆動モータに起因する外乱を推定する。尚、模擬擾乱の検出と外乱の推定とを並列して行う。
【0020】
模擬擾乱の検出においては、模擬する擾乱の周波数帯域に合わせたバンドパスフィルタを用いて模擬擾乱の加速度成分を検出する。従って、複数の周波数の擾乱を模擬する場合には、複数個のバンドパスフィルタを構築して各模擬する擾乱の周波数帯域のみの加速度成分を検出する。
駆動モータに起因する外乱の推定においては、外乱の周期が既知であれば模擬擾乱の検出と同様に、バンドパスフィルタを用いて駆動モータに起因する外乱の加速度成分を検出することができる。
一方、外乱の周期が未知の場合は、駆動モータのコギングトルクやトルクリップルなどは周期的な外乱となることが多いため、正弦波の重ね合わせと仮定し、外乱の周期と振幅を逐次同定させる。
【0021】
そして、観測機器駆動運動検出部325において、加速度成分検出部322から出力される加速度成分から模擬擾乱検出部323で検出した模擬擾乱と外乱推定部324で推定したモータ外乱を差し引きしたものを観測機器駆動運動分の加速度成分とする。
観測機器駆動コントローラ31において、観測機器駆動運動分の加速度成分を元に各観測機器駆動モータへの指令信号を生成する。
【0022】
モータ外乱補償部33において、外乱の推定値を元に駆動モータの外乱を積極的に打ち消すための指令値を生成し、生成した指令値を加振装置コントローラ30に送る。
加振装置コントローラ30は、指令値に基づいて加振装置21を加振する。
【0023】
このように運動分離部32とモータ外乱補償部33を備えた構成により、観測機器駆動モータに起因する外乱の積極的な除去と宇宙機の各搭載機器に起因する擾乱の模擬とを同時に実現することができるので、宇宙機の運動模擬を高精度化することができる。
【0024】
実施の形態2.
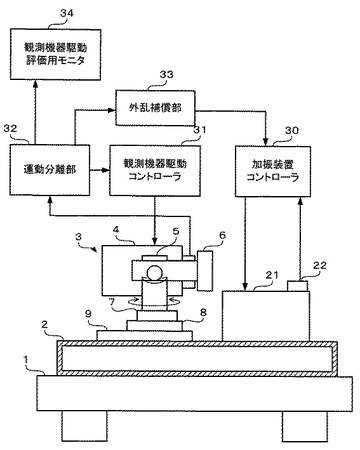
図4は、本発明の実施の形態2に係る宇宙機運動シミュレータの構成を示す図である。図5は、周辺を含む運動分離部32の機能ブロック図である。
本発明の実施の形態2に係る宇宙機運動シミュレータは、本発明の実施の形態1に係る宇宙機運動シミュレータに観測機器駆動評価用モニタ34を追加したことが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明を省略する。
観測機器駆動評価用モニタ34は、観測機器駆動運動検出部325で検出された観測機器駆動運動の加速度成分と模擬擾乱検出部323で検出した模擬擾乱から、両者の運動をリアルタイムに表示する。
【0025】
この観測機器駆動評価用モニタ34を具備することにより、加振装置21が模擬する擾乱力/トルクが宇宙機の指向方向にどのように影響するか、すなわち擾乱源から観測機器4の検出器までの伝達特性を定量的かつ視覚的に評価することができるという効果がある。
【0026】
実施の形態3.
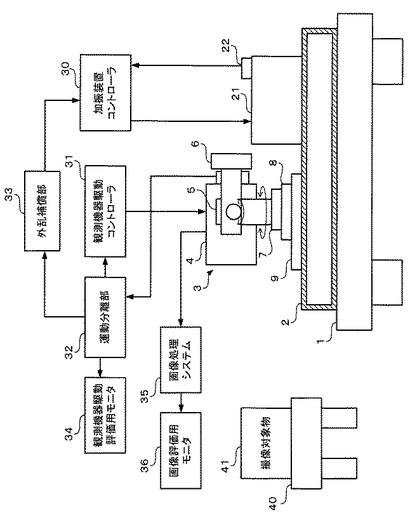
図6は、本発明の実施の形態3に係る宇宙機運動シミュレータの構成を示す図である。
本発明の実施の形態3に係る宇宙機運動シミュレータは、本発明の実施の形態1に係る宇宙機運動シミュレータの観測機器4が観測カメラであるとともに観測カメラにより撮影される撮像対象物41が除振台40の上に設置され、且つ撮影カメラにより撮影された画像を処理する画像処理システム35とその画像を表示する画像評価用モニタ36を備えることが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明を省略する。
【0027】
観測機器4で撮影した画像は、画像処理システム35で画像データの取り込みと解析が行われる。各種解析結果は、画像評価用モニタ36に表示される。
このときの撮像対象物41は地球表面を模擬した静止画、地球の自転や雲の動きなどを再現した動画、移動体を模擬した物体、移動体の運動を再現した動画、以上を組み合わせたものでもよい。
また、観測機器4を赤外観測機器とした場合、撮像対象物41を地球表面の陸地、海または雲などを模擬した温度分布を持つプレートや、温度分布が時々刻々と変化するもの、熱源として温度を持つ物体であってもよい。
【0028】
撮像対象物41を宇宙機との相対運動も取り入れた動画とした場合は、駆動観測機器3の駆動モータの駆動は必要なく固定とすることができる。但し、撮像対象物41の寸法および駆動観測機器3と撮像対象物41との距離は、実際の軌道上の宇宙機とのスケーリングに基づいて計算されたものとする。
【0029】
この構成によれば、宇宙機の各搭載機器に起因する擾乱を考慮して高精度な軌道運動を模擬した状態で、観測機器4の撮影した画像を評価することができるため、例えば指向安定度や指向精度、撮像対象物41のS/N比などを、取得画像を用いて定量的かつ視覚的に評価を行うことできるという効果がある。
【0030】
実施の形態4.
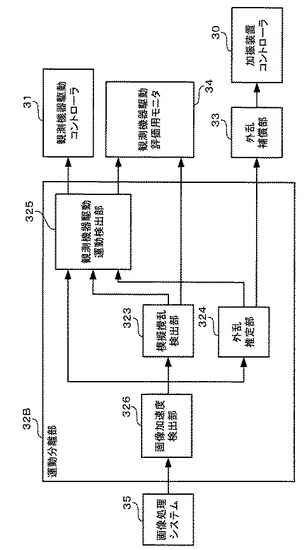
図7は、本発明の実施の形態4に係る宇宙機運動シミュレータの構成を示す図である。図8は、この発明の実施の形態4に係る宇宙機運動シミュレータの周辺を含む運動分離部32Bの機能ブロック図である。
本発明の実施の形態4に係る宇宙機運動シミュレータは、本発明の実施の形態3に係る宇宙機運動シミュレータと運動分離部32Bが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明を省略する。
本発明の実施の形態4に係る運動分離部32Bは、本発明の実施の形態1に係る運動分離部32のセンサノイズ成分除去部321および加速度成分検出部322の代わりに画像加速度検出部326を有することが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明を省略する。
【0031】
画像加速度検出部326は、画像処理システム35で取得した画像と予定していた画像との差から、運動のずれ、すなわち駆動モータに起因する外乱の推定、および加速度成分の検出を行う。検出した加速度成分から、実施の形態1と同様に、模擬擾乱検出部323において加振装置21による模擬擾乱の検出を行い、外乱推定部324において駆動モータに起因する外乱の推定を行う。
【0032】
この構成によれば、観測カメラの撮像画像から駆動モータに起因する外乱の推定が可能となる周波数帯域に限り、駆動観測機器用加速度センサユニット11を不要とすることができる。
【0033】
実施の形態5.
図9は、この発明の実施の形態5に係る宇宙機運動シミュレータの周辺を含む運動分離部32Cの機能ブロック図である。
本発明の実施の形態5に係る宇宙機運動シミュレータは、本発明の実施の形態1に係る宇宙機運動シミュレータと運動分離部32Cが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明を省略する。
運動分離部32Cの外乱推定部324Cは、支配的な擾乱レベルである自由度だけに対して、バンドパスフィルタを用いて駆動モータに起因する外乱の加速度成分を検出する。
そして、加振装置21により支配的な擾乱レベルである自由度だけに対して駆動する。
【0034】
擾乱源の特性上、支配的な擾乱レベルが数自由度のみであり、他の自由度における擾乱レベルは比較的無視できるので、自由度を縮退した分だけ加振装置コントローラ30を簡素化することができ、推定における計算機の負荷を軽減させることができる。
【0035】
実施の形態6.
実施の形態1に係る宇宙機運動シミュレータにおいて、加振装置21による模擬擾乱の周波数成分と駆動モータに起因する外乱の周波数成分とが近似している場合、バンドパスフィルタを用いたフィルタ処理によって両者を分離できない場合が考えられる。そこで、加振装置21の駆動を停止させて、駆動観測機器3の駆動モータのみ駆動させた状態で駆動観測機器用加速度センサユニット11からの検出量を解析することにより、駆動モータに起因する外乱の振幅、周波数を把握することができる。
これにより、模擬擾乱の周波数成分と駆動モータに起因する外乱の周波数成分が近似していたとしても、両者の識別が可能となる。
【符号の説明】
【0036】
1 定盤、2 宇宙機模擬構体、3 駆動観測機器、4 観測機器、5 第一回転機構部、6 第二回転機構部、7 第三回転機構部、8 第一並進機構部、9 第二並進機構部、10 第三並進機構部、11 駆動観測機器用加速度センサユニット、12 宇宙機模擬構体、21 加振装置、22 加振装置用加速度センサユニット、30 加振装置コントローラ、31 観測機器駆動コントローラ、32、32B、32C 運動分離部、33 モータ外乱補償部、34 観測機器駆動評価用モニタ、35 画像処理システム、36 画像評価用モニタ、40 除振台、41 撮像対象物、211 可動マス、212 アクチュエータリンク、213a、213b 回転ジョイント、214 ベースプレート、321 センサノイズ成分除去部、322 加速度成分検出部、323 模擬擾乱検出部、324、324C 外乱推定部、325 観測機器駆動運動検出部、326 画像加速度検出部。
【技術分野】
【0001】
この発明は、宇宙機の軌道運動を地上で模擬するための宇宙機運動シミュレータに関するものである。
【背景技術】
【0002】
宇宙機の軌道上でのダイナミクスを地上で模擬するための装置は、アッパープレートとベースプレートを6つの2リンクアームによって結合し、ベースプレートと2リンクアームとの各結合部分にそれぞれ回転型アクチュエータを装着し、各回転型アクチュエータを駆動することによってアッパープレートの位置と姿勢を自由に変更することを可能とする宇宙機支持機構と、アッパープレート上の宇宙機ダイナミクスモデルに加わる6自由度の力を検出する力検出器をもとに各回転型アクチュエータへの指令を生成する宇宙機支持機構制御器を具備することにより、宇宙機の軌道上ダイナミクスを6自由度全てに対して模擬試験を実施することを可能とするものである(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平7−187100号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、宇宙機の軌道運動を地上で模擬し、評価試験を行うための宇宙機運動シミュレータにおいて、宇宙機の6自由度運動を実現するため、3軸並進方向の可動部材と3軸周りの回転用モータを必要とする。その結果、各モータを駆動した際に、モータ駆動に起因する外乱の発生により、実際の宇宙機には無い力/トルクが付加され、模擬すべき運動とは厳密に異なる運動となってしまうという問題点がある。
また、近年、宇宙機ミッションの高度化に伴い、高い指向安定度の要求が高まっており、これまで無視できていた各搭載機器に起因する高周波の微小振動の影響が無視できなくなり、従来の構成では宇宙機の軌道運動の模擬精度が低いという問題点がある。
【0005】
この発明は、前記のような課題を解決するためになされたものであり、宇宙機の広帯域に亘る軌道運動を高精度に模擬する宇宙機運動シミュレータを得ることを目的とする。
【課題を解決するための手段】
【0006】
この発明に係る宇宙機運動シミュレータは、宇宙機の構体を模擬した宇宙機模擬構体を固定する定盤と、該宇宙機模擬構体の上に設置されるとともに観測機器を3軸並進運動並びに3軸回転運動を可能とする機構を有する駆動観測機器と、上記駆動観測機器のフィードバック制御を行うために取り付けられた駆動観測機器用加速度センサユニットと、を備える宇宙機運動シミュレータにおいて、該宇宙機模擬構体の上に設置されるとともに6自由度且つ複数の周波数の微小振動を発生させるスチュワートプラットフォーム機構の加振装置と、上記駆動観測機器用加速度センサユニットの加速度検出量からセンサノイズを除去し、且つセンサノイズ除去後の加速度検出量から上記駆動観測機器の駆動モータに起因する外乱を検出するともに上記加振装置の駆動による擾乱を推定する運動分離部と、を備える。
【発明の効果】
【0007】
この発明に係る宇宙機運動シミュレータは、運動分離部にて駆動観測機器の駆動モータに起因する外乱の推定を行い、推定した外乱を加振装置で積極的に除去すると同時に、加振装置の駆動により各搭載機器に起因する高周波の微小振動を模擬することができるため、宇宙機の広帯域における軌道運動を高精度に模擬することができるという効果がある。
【図面の簡単な説明】
【0008】
【図1】本発明の実施の形態1に係る宇宙機運動シミュレータの構成を示す図である。
【図2】加振装置をスチュワートプラットフォーム機構としたときの構成図である。
【図3】周辺を含む図1の運動分離部の機能ブロック図である。
【図4】本発明の実施の形態2に係る宇宙機運動シミュレータの構成を示す図である。
【図5】周辺を含む図4の運動分離部の機能ブロック図である。
【図6】本発明の実施の形態3に係る宇宙機運動シミュレータの構成を示す図である
【図7】本発明の実施の形態4に係る宇宙機運動シミュレータの構成を示す図である
【図8】周辺を含む図7の運動分離部の機能ブロック図である。
【図9】この発明の実施の形態5に係る宇宙機運動シミュレータの周辺を含む運動分離部の機能ブロック図である。
【発明を実施するための形態】
【0009】
以下、本発明の宇宙機運動シミュレータの好適な実施の形態につき図面を用いて説明する。
実施の形態1.
図1は、本発明の実施の形態1に係る宇宙機運動シミュレータの構成を示す図である。 本発明の実施の形態1に係る宇宙機運動シミュレータは、宇宙機の構体を模擬した宇宙機模擬構体2を上に固定される定盤1と、宇宙機模擬構体2の上に設置されるとともに宇宙機の6自由度の軌道運動を模擬するための駆動観測機器3と、定盤1の上に固定された宇宙機模擬構体2の上に配置される加振装置21と、を備える。
【0010】
また、本発明の実施の形態1に係る宇宙機運動シミュレータは、駆動観測機器3に起因する外乱の推定と加振装置21による模擬擾乱の検出を行うとともに駆動観測機器3に起因する外乱と加振装置21による模擬擾乱と観測機器駆動による運動の3つの運動を分離する運動分離部32と、観測機器駆動による運動分の加速度成分を元に駆動観測機器3への指令信号を生成する観測機器駆動コントローラ31と、外乱の推定値を元に駆動モータの外乱を積極的に打ち消すための指令値を生成するモータ外乱補償部33と、生成した指令値に基づいて加振装置21を加振する加振装置コントローラ30と、を備える。
【0011】
駆動観測機器3は、観測機器4と、観測機器4のピッチ軸周りの回転制御が可能な第一回転機構部5と、ロール軸周りの回転制御が可能な第二回転機構部6と、ヨー軸周りの回転制御が可能な第三回転機構部7と、水平方向の並進変位の制御を可能とする第一並進機構部8および第二並進機構部9と、垂直方向の変位を制御可能な第三並進機構部10と、を備え、モータ駆動により並進3自由度と回転3自由度の運動を可能とする。
【0012】
観測機器4は、宇宙機に望まれる固有のミッションを遂行するための機器であり、可視カメラや赤外カメラ、アンテナなどでもよい。
駆動観測機器3には、駆動観測機器3の検出器に近い位置に駆動観測機器用加速度センサユニット11が設けられており、基本的には駆動観測機器用加速度センサユニット11の検出量を元に各軸のモータのフィードバック制御を行う。
駆動観測機器3の駆動により、観測機器4の観測対象物と宇宙機の相対位置および姿勢を地上で再現することができるため、静止軌道や地球周回軌道など軌道を限定することなく、様々な軌道上での宇宙機の運動を模擬することができる。
【0013】
従来の例えば特許文献1のような宇宙機の6自由度運動を模擬する構成の場合、宇宙機モデル本体を駆動部材により支持し駆動させるため、数Hz〜10数Hz程度の低周波数の運動に限定されていた。近年の宇宙機ミッションは、小型衛星や大型衛星問わず、高い指向安定度が要求されるようになっており、これまで問題にならなかったアンテナ、リアクションホイール、慣性基準装置などの各搭載機器の駆動により発生する微小振動(以下、擾乱という)の影響が無視できなくなってきている。これらの擾乱の周波数成分の多くは、10数Hz以上の高周波である。
【0014】
地上での軌道運動に関する評価試験装置においても、軌道上の宇宙機の運動を高精度に模擬する必要性が生じてきており、宇宙機の低周波の運動のみならず、宇宙機の各搭載機器から発生する高周波の擾乱による宇宙機の運動への影響も考慮する必要がある。
そのために、駆動観測機器3とは別に加振装置21を、定盤1の上に固定された宇宙機模擬構体2の上に配置している。
【0015】
図2は、加振装置21をスチュワートプラットフォーム機構としたときの構成図を示す。
加振装置21は、6自由度・複数周波数の加振力/トルクを発生することが可能な装置であり、スチュワートプラットフォーム機構型加振装置の場合、可動マス211と、6本のアクチュエータリンク212と、ベースプレート214と、から構成され、6本のアクチュエータリンク212を並列に組み合わせて可動マス211を支持する形をとる。
アクチュエータリンク212は、積層型の圧電素子をアクチュエータとした積層圧電アクチュエータと、積層圧電アクチュエータの両端に取付けられた多自由度の回転ジョイント213a、213bと、積層圧電アクチュエータに取り付けられた歪ゲージセンサと、から構成され、歪ゲージセンサからの歪データを用いたフィードバック制御により積層圧電アクチュエータの持つ非線形性とヒステリシスを排除する。
【0016】
また、可動マス211に取り付けられた加振装置用加速度センサユニット22により各自由度の加速度を検出し、加振装置用加速度センサユニット22から検出された各自由度の加速度を元に、出力すべき加振力/トルクを算出し、加振装置21に対する指令信号を加振装置コントローラ30にて生成する。
この構成により、スチュワートプラットフォーム機構の最大の利点である高剛性且つ高精度な6自由度運動を実現することができるという特徴を生かし、宇宙機の各搭載機器から発生する6自由度で且つ複数の周波数の高周波の擾乱を高精度に模擬することができる。
尚、加振装置21としてスチュワートプラットフォーム機構を適用したが、これに限らずに6自由度で且つ複数の周波数の高周波の振動を加振するものであれば良い。
【0017】
加振装置21の駆動によって発生した加振力/トルクは宇宙機模擬構体2を経由して駆動観測機器3に伝達され、駆動観測機器用加速度センサユニット11にて加振装置21に起因する6自由度の加速度が検出される。ここで、宇宙機模擬構体2はアルミなどの金属板をロの字型、もしくは中が空洞の箱型に加工したものである。宇宙機模擬構体12の寸法と厚さに関しては、駆動観測機器3および加振装置21が取り付けられる上面の金属板が、伝達させたい振動周波数で共振するモードが存在するように有限要素法解析を用いて設計を行う。設計条件としては、四辺固定の板の上に駆動観測機器3と加振装置21の二つの荷重が加わった状態とする。駆動観測機器3と加振装置21の配置の位置も有限要素法解析を用いることで、金属板の共振周波数が伝達させたい振動周波数となるように設計される。
この構成により、例えば観測機器4の検出器や光学系の主鏡、副鏡など宇宙機のミッション機器における擾乱の要求が厳しい部分の擾乱力/トルクの要求値、支配的な擾乱周波数が既知である場合は、その擾乱レベルを正確に模擬することができ、擾乱要求値の妥当性を実機で検証することができる。
【0018】
駆動観測機器用加速度センサユニット11の検出量には、加振装置21の駆動による加速度成分に加えて、加速度センサの持つセンサノイズやコギングトルクやトルクリップルなど駆動観測機器3の駆動モータに起因する外乱を含む可能性がある。
そこで、駆動観測機器用加速度センサユニット11の検出量からセンサノイズを除去し、センサノイズを除去後の加速度検出量から駆動モータに起因する外乱の推定と加振装置21による模擬擾乱の検出を行い、駆動モータに起因する外乱と加振装置21による模擬擾乱と観測機器駆動による運動の3つの運動を分離する運動分離部32を備える。
【0019】
図3は、周辺を含む運動分離部32の機能ブロック図である。
まず、センサノイズ成分除去部321において、6自由度分の駆動観測機器用加速度センサユニット11からの検出量にローパスフィルタによるフィルタリングを施して検出量から高周波成分を除去する。加速度成分検出部322において、センサノイズを除去した検出量から加速度成分を検出する。模擬擾乱検出部323において、加速度成分から加振装置21による模擬擾乱を検出する。外乱推定部324において、加速度成分から駆動モータに起因する外乱を推定する。尚、模擬擾乱の検出と外乱の推定とを並列して行う。
【0020】
模擬擾乱の検出においては、模擬する擾乱の周波数帯域に合わせたバンドパスフィルタを用いて模擬擾乱の加速度成分を検出する。従って、複数の周波数の擾乱を模擬する場合には、複数個のバンドパスフィルタを構築して各模擬する擾乱の周波数帯域のみの加速度成分を検出する。
駆動モータに起因する外乱の推定においては、外乱の周期が既知であれば模擬擾乱の検出と同様に、バンドパスフィルタを用いて駆動モータに起因する外乱の加速度成分を検出することができる。
一方、外乱の周期が未知の場合は、駆動モータのコギングトルクやトルクリップルなどは周期的な外乱となることが多いため、正弦波の重ね合わせと仮定し、外乱の周期と振幅を逐次同定させる。
【0021】
そして、観測機器駆動運動検出部325において、加速度成分検出部322から出力される加速度成分から模擬擾乱検出部323で検出した模擬擾乱と外乱推定部324で推定したモータ外乱を差し引きしたものを観測機器駆動運動分の加速度成分とする。
観測機器駆動コントローラ31において、観測機器駆動運動分の加速度成分を元に各観測機器駆動モータへの指令信号を生成する。
【0022】
モータ外乱補償部33において、外乱の推定値を元に駆動モータの外乱を積極的に打ち消すための指令値を生成し、生成した指令値を加振装置コントローラ30に送る。
加振装置コントローラ30は、指令値に基づいて加振装置21を加振する。
【0023】
このように運動分離部32とモータ外乱補償部33を備えた構成により、観測機器駆動モータに起因する外乱の積極的な除去と宇宙機の各搭載機器に起因する擾乱の模擬とを同時に実現することができるので、宇宙機の運動模擬を高精度化することができる。
【0024】
実施の形態2.
図4は、本発明の実施の形態2に係る宇宙機運動シミュレータの構成を示す図である。図5は、周辺を含む運動分離部32の機能ブロック図である。
本発明の実施の形態2に係る宇宙機運動シミュレータは、本発明の実施の形態1に係る宇宙機運動シミュレータに観測機器駆動評価用モニタ34を追加したことが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明を省略する。
観測機器駆動評価用モニタ34は、観測機器駆動運動検出部325で検出された観測機器駆動運動の加速度成分と模擬擾乱検出部323で検出した模擬擾乱から、両者の運動をリアルタイムに表示する。
【0025】
この観測機器駆動評価用モニタ34を具備することにより、加振装置21が模擬する擾乱力/トルクが宇宙機の指向方向にどのように影響するか、すなわち擾乱源から観測機器4の検出器までの伝達特性を定量的かつ視覚的に評価することができるという効果がある。
【0026】
実施の形態3.
図6は、本発明の実施の形態3に係る宇宙機運動シミュレータの構成を示す図である。
本発明の実施の形態3に係る宇宙機運動シミュレータは、本発明の実施の形態1に係る宇宙機運動シミュレータの観測機器4が観測カメラであるとともに観測カメラにより撮影される撮像対象物41が除振台40の上に設置され、且つ撮影カメラにより撮影された画像を処理する画像処理システム35とその画像を表示する画像評価用モニタ36を備えることが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明を省略する。
【0027】
観測機器4で撮影した画像は、画像処理システム35で画像データの取り込みと解析が行われる。各種解析結果は、画像評価用モニタ36に表示される。
このときの撮像対象物41は地球表面を模擬した静止画、地球の自転や雲の動きなどを再現した動画、移動体を模擬した物体、移動体の運動を再現した動画、以上を組み合わせたものでもよい。
また、観測機器4を赤外観測機器とした場合、撮像対象物41を地球表面の陸地、海または雲などを模擬した温度分布を持つプレートや、温度分布が時々刻々と変化するもの、熱源として温度を持つ物体であってもよい。
【0028】
撮像対象物41を宇宙機との相対運動も取り入れた動画とした場合は、駆動観測機器3の駆動モータの駆動は必要なく固定とすることができる。但し、撮像対象物41の寸法および駆動観測機器3と撮像対象物41との距離は、実際の軌道上の宇宙機とのスケーリングに基づいて計算されたものとする。
【0029】
この構成によれば、宇宙機の各搭載機器に起因する擾乱を考慮して高精度な軌道運動を模擬した状態で、観測機器4の撮影した画像を評価することができるため、例えば指向安定度や指向精度、撮像対象物41のS/N比などを、取得画像を用いて定量的かつ視覚的に評価を行うことできるという効果がある。
【0030】
実施の形態4.
図7は、本発明の実施の形態4に係る宇宙機運動シミュレータの構成を示す図である。図8は、この発明の実施の形態4に係る宇宙機運動シミュレータの周辺を含む運動分離部32Bの機能ブロック図である。
本発明の実施の形態4に係る宇宙機運動シミュレータは、本発明の実施の形態3に係る宇宙機運動シミュレータと運動分離部32Bが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明を省略する。
本発明の実施の形態4に係る運動分離部32Bは、本発明の実施の形態1に係る運動分離部32のセンサノイズ成分除去部321および加速度成分検出部322の代わりに画像加速度検出部326を有することが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明を省略する。
【0031】
画像加速度検出部326は、画像処理システム35で取得した画像と予定していた画像との差から、運動のずれ、すなわち駆動モータに起因する外乱の推定、および加速度成分の検出を行う。検出した加速度成分から、実施の形態1と同様に、模擬擾乱検出部323において加振装置21による模擬擾乱の検出を行い、外乱推定部324において駆動モータに起因する外乱の推定を行う。
【0032】
この構成によれば、観測カメラの撮像画像から駆動モータに起因する外乱の推定が可能となる周波数帯域に限り、駆動観測機器用加速度センサユニット11を不要とすることができる。
【0033】
実施の形態5.
図9は、この発明の実施の形態5に係る宇宙機運動シミュレータの周辺を含む運動分離部32Cの機能ブロック図である。
本発明の実施の形態5に係る宇宙機運動シミュレータは、本発明の実施の形態1に係る宇宙機運動シミュレータと運動分離部32Cが異なり、それ以外は同様であるので、同様な部分に同じ符号を付記し説明を省略する。
運動分離部32Cの外乱推定部324Cは、支配的な擾乱レベルである自由度だけに対して、バンドパスフィルタを用いて駆動モータに起因する外乱の加速度成分を検出する。
そして、加振装置21により支配的な擾乱レベルである自由度だけに対して駆動する。
【0034】
擾乱源の特性上、支配的な擾乱レベルが数自由度のみであり、他の自由度における擾乱レベルは比較的無視できるので、自由度を縮退した分だけ加振装置コントローラ30を簡素化することができ、推定における計算機の負荷を軽減させることができる。
【0035】
実施の形態6.
実施の形態1に係る宇宙機運動シミュレータにおいて、加振装置21による模擬擾乱の周波数成分と駆動モータに起因する外乱の周波数成分とが近似している場合、バンドパスフィルタを用いたフィルタ処理によって両者を分離できない場合が考えられる。そこで、加振装置21の駆動を停止させて、駆動観測機器3の駆動モータのみ駆動させた状態で駆動観測機器用加速度センサユニット11からの検出量を解析することにより、駆動モータに起因する外乱の振幅、周波数を把握することができる。
これにより、模擬擾乱の周波数成分と駆動モータに起因する外乱の周波数成分が近似していたとしても、両者の識別が可能となる。
【符号の説明】
【0036】
1 定盤、2 宇宙機模擬構体、3 駆動観測機器、4 観測機器、5 第一回転機構部、6 第二回転機構部、7 第三回転機構部、8 第一並進機構部、9 第二並進機構部、10 第三並進機構部、11 駆動観測機器用加速度センサユニット、12 宇宙機模擬構体、21 加振装置、22 加振装置用加速度センサユニット、30 加振装置コントローラ、31 観測機器駆動コントローラ、32、32B、32C 運動分離部、33 モータ外乱補償部、34 観測機器駆動評価用モニタ、35 画像処理システム、36 画像評価用モニタ、40 除振台、41 撮像対象物、211 可動マス、212 アクチュエータリンク、213a、213b 回転ジョイント、214 ベースプレート、321 センサノイズ成分除去部、322 加速度成分検出部、323 模擬擾乱検出部、324、324C 外乱推定部、325 観測機器駆動運動検出部、326 画像加速度検出部。
【特許請求の範囲】
【請求項1】
宇宙機の構体を模擬した宇宙機模擬構体を固定する定盤と、該宇宙機模擬構体の上に設置されるとともに観測機器を3軸並進運動並びに3軸回転運動を可能とする機構を有する駆動観測機器と、上記駆動観測機器のフィードバック制御を行うために取り付けられた駆動観測機器用加速度センサユニットと、を備える宇宙機運動シミュレータにおいて、
該宇宙機模擬構体の上に設置されるとともに6自由度且つ複数の周波数の微小振動を発生させるスチュワートプラットフォーム機構の加振装置と、
上記駆動観測機器用加速度センサユニットの加速度検出量からセンサノイズを除去し、且つセンサノイズ除去後の加速度検出量から上記駆動観測機器の駆動モータに起因する外乱を検出するともに上記加振装置の駆動による擾乱を推定する運動分離部と、
を備えることを特徴とする宇宙機運動シミュレータ。
【請求項2】
上記加振装置は、スチュワートプラットフォーム機構であることを特徴とする請求項1に記載の宇宙機運動シミュレータ。
【請求項3】
上記観測機器の6自由度の運動と上記加振装置により模擬した擾乱力/トルクとを表示する観測機器駆動評価用モニタを備えることを特徴とする請求項1または2に記載の宇宙機運動シミュレータ。
【請求項4】
上記運動分離部にて推定した上記駆動観測機器の駆動モータに起因する外乱から、該外乱を打ち消すために上記加振装置をコントロールする指令値を生成するモータ外乱補償部を備え、
上記駆動観測機器の駆動モータに起因する外乱を打ち消すと同時に、宇宙機の各搭載機器に起因する擾乱を模擬するように上記加振装置を駆動させることを特徴とする請求項1乃至3のいずれかに記載の宇宙機運動シミュレータ。
【請求項5】
上記観測機器は、観測カメラであり、
上記運動分離部は、上記観測カメラが撮像した画像と予定していた画像との差から上記駆動観測機器の加速度を検出する画像加速度検出部を備えることを特徴とする請求項1乃至4のいずれかに記載の宇宙機運動シミュレータ。
【請求項6】
上記運動分離部は、上記加振装置による模擬擾乱の周波数成分と上記駆動観測機器の駆動モータに起因する外乱の周波数成分とが近似している場合、上記加振装置の駆動を停止させて、上記駆動観測機器の駆動モータのみ駆動させた状態で上記駆動観測機器用加速度センサユニットからの検出量を解析することにより、上記駆動観測機器の駆動モータに起因する外乱の振幅および周波数を把握することを特徴とする請求項1乃至5のいずれかに記載の宇宙機運動シミュレータ。
【請求項1】
宇宙機の構体を模擬した宇宙機模擬構体を固定する定盤と、該宇宙機模擬構体の上に設置されるとともに観測機器を3軸並進運動並びに3軸回転運動を可能とする機構を有する駆動観測機器と、上記駆動観測機器のフィードバック制御を行うために取り付けられた駆動観測機器用加速度センサユニットと、を備える宇宙機運動シミュレータにおいて、
該宇宙機模擬構体の上に設置されるとともに6自由度且つ複数の周波数の微小振動を発生させるスチュワートプラットフォーム機構の加振装置と、
上記駆動観測機器用加速度センサユニットの加速度検出量からセンサノイズを除去し、且つセンサノイズ除去後の加速度検出量から上記駆動観測機器の駆動モータに起因する外乱を検出するともに上記加振装置の駆動による擾乱を推定する運動分離部と、
を備えることを特徴とする宇宙機運動シミュレータ。
【請求項2】
上記加振装置は、スチュワートプラットフォーム機構であることを特徴とする請求項1に記載の宇宙機運動シミュレータ。
【請求項3】
上記観測機器の6自由度の運動と上記加振装置により模擬した擾乱力/トルクとを表示する観測機器駆動評価用モニタを備えることを特徴とする請求項1または2に記載の宇宙機運動シミュレータ。
【請求項4】
上記運動分離部にて推定した上記駆動観測機器の駆動モータに起因する外乱から、該外乱を打ち消すために上記加振装置をコントロールする指令値を生成するモータ外乱補償部を備え、
上記駆動観測機器の駆動モータに起因する外乱を打ち消すと同時に、宇宙機の各搭載機器に起因する擾乱を模擬するように上記加振装置を駆動させることを特徴とする請求項1乃至3のいずれかに記載の宇宙機運動シミュレータ。
【請求項5】
上記観測機器は、観測カメラであり、
上記運動分離部は、上記観測カメラが撮像した画像と予定していた画像との差から上記駆動観測機器の加速度を検出する画像加速度検出部を備えることを特徴とする請求項1乃至4のいずれかに記載の宇宙機運動シミュレータ。
【請求項6】
上記運動分離部は、上記加振装置による模擬擾乱の周波数成分と上記駆動観測機器の駆動モータに起因する外乱の周波数成分とが近似している場合、上記加振装置の駆動を停止させて、上記駆動観測機器の駆動モータのみ駆動させた状態で上記駆動観測機器用加速度センサユニットからの検出量を解析することにより、上記駆動観測機器の駆動モータに起因する外乱の振幅および周波数を把握することを特徴とする請求項1乃至5のいずれかに記載の宇宙機運動シミュレータ。
【図1】


【図2】
【図3】

【図4】
【図5】

【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2011−213313(P2011−213313A)
【公開日】平成23年10月27日(2011.10.27)
【国際特許分類】
【出願番号】特願2010−85688(P2010−85688)
【出願日】平成22年4月2日(2010.4.2)
【出願人】(000006013)三菱電機株式会社 (33,312)
【公開日】平成23年10月27日(2011.10.27)
【国際特許分類】
【出願日】平成22年4月2日(2010.4.2)
【出願人】(000006013)三菱電機株式会社 (33,312)
[ Back to top ]