
宇宙機運動模擬装置
【課題】衛星の大角度の姿勢運動と広帯域な微小擾乱環境を模擬する。
【解決手段】宇宙機運動模擬装置は、姿勢模擬部と、搭載機器を搭載する擾乱模擬部と、これらを作動させる搭載系模擬装置とを備え、姿勢模擬部は搭載系模擬装置からの姿勢指令値によって駆動され、擾乱模擬部は、搭載系模擬装置からの擾乱生成指令値によって、姿勢模擬部および擾乱模擬部の姿勢に基づいて、姿勢模擬部による擾乱の影響を打ち消すように擾乱指令生成装置によって生成された擾乱指令値によって駆動される。
【効果】可動範囲が広く、広帯域な微小擾乱環境を模擬できる。
【解決手段】宇宙機運動模擬装置は、姿勢模擬部と、搭載機器を搭載する擾乱模擬部と、これらを作動させる搭載系模擬装置とを備え、姿勢模擬部は搭載系模擬装置からの姿勢指令値によって駆動され、擾乱模擬部は、搭載系模擬装置からの擾乱生成指令値によって、姿勢模擬部および擾乱模擬部の姿勢に基づいて、姿勢模擬部による擾乱の影響を打ち消すように擾乱指令生成装置によって生成された擾乱指令値によって駆動される。
【効果】可動範囲が広く、広帯域な微小擾乱環境を模擬できる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は宇宙機運動模擬装置に関するものであり、特に回転駆動される宇宙機姿勢模擬部と、6自由度の並進駆動および回転駆動される宇宙機擾乱模擬部とを備えた宇宙機運動模擬装置に関するものである。
【背景技術】
【0002】
従来の宇宙機運動模擬装置では、二つのリンクがユニバーサルジョイントで接続され一端にはボールジョイントが、他端には回転型アクチュエータが装着してある複数の2リンクアームを備えており、アッパープレートとベースプレートを6つの2リンクアームによって結合し、ベースプレートと2リンクアームとの各結合部分に回転型アクチュエータを配置し、各回転型アクチュエータを駆動することでアッパープレートの位置および姿勢を自由に変化させる構成としている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平07−187100号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような宇宙機運動模擬装置にあっては、2リンク機構による並進可動範囲が小さいため、宇宙機の姿勢運動を模擬する場合には、2リンクアームの長さを大きくする必要があり、宇宙機運動模擬装置機構部が大型化するという問題点があった。また、リンク機構のため、姿勢運動を模擬する角度範囲が限定され、衛星の大角度での姿勢運動を模擬しながらかつ衛星の広帯域な微小擾乱環境を模擬することができないという問題点があった。
【0005】
従ってこの発明の目的は、回転可動範囲が広く、かつ衛星の広帯域な微小擾乱環境を模擬できる宇宙機運動模擬装置を得ることを目的としている。
【課題を解決するための手段】
【0006】
この発明に係る宇宙機運動模擬装置は、第1の回転機構部と直結した第1の回転型アクチュエータと、第1の回転機構部に組み込まれた第2の回転型アクチュエータと軸受けにより支持される第2の回転機構部と、第2の回転機構部に組み込まれた第3の回転型アクチュエータと、第3の回転機構部を介して第3の回転型アクチュエータと直結した第1の搭載機器インタフェース部を備えた宇宙機姿勢模擬部と、上記第1の搭載機器インタフェース部上に、パラレルメカニズムにより6自由度の並進駆動および回転駆動されるように支持され、搭載機器を搭載するための第2の搭載機器インタフェース部を備えた宇宙機擾乱模擬部と、上記宇宙機姿勢模擬部および上記宇宙機擾乱模擬部を作動させる宇宙機搭載系模擬装置とを備えた宇宙機運動模擬装置において、上記宇宙機搭載系模擬装置からの姿勢指令値によって上記宇宙機姿勢模擬部を駆動する姿勢模擬部駆動装置と、上記宇宙機搭載系模擬装置からの擾乱生成指令値によって、上記宇宙機姿勢模擬部の姿勢および上記宇宙機擾乱模擬部の姿勢に基づいて、上記宇宙機姿勢模擬部による擾乱の影響を打ち消すように上記宇宙機擾乱指令値に基づいた擾乱指令値を生成して、上記擾乱模擬部駆動装置を作動させる擾乱指令生成装置とを備えたことを特徴とするものである。
【発明の効果】
【0007】
この発明によれば、パラレルメカニズムにより6自由度の並進駆動および回転駆動される宇宙機擾乱模擬部を備えたことにより6自由度の高速駆動ができ、回転型アクチュエータにより回転駆動される宇宙機姿勢模擬部を備えたことにより回転可動範囲を大きくでき、宇宙機姿勢模擬部による姿勢情報と宇宙機擾乱模擬部による並進3自由度および回転3自由度の変動情報とから擾乱指令値を生成する擾乱指令生成装置を備えたことにより宇宙機姿勢模擬部による擾乱の影響を抑制して所望の擾乱のみを発生できる、といった従来にない顕著な効果を奏するものである。
【図面の簡単な説明】
【0008】
【図1】本発明の実施の形態1による宇宙機運動模擬装置を示す側面図である。
【図2】本発明の実施の形態2による宇宙機運動模擬装置を示す側面図である。
【図3】本発明の実施の形態2による宇宙機擾乱模擬部を示す上面図である。
【図4】本発明の実施の形態3による宇宙機運動模擬装置を示す側面図である。
【図5】本発明の実施の形態4による宇宙機運動模擬装置を示す側面図である。
【図6】本発明の実施の形態5による宇宙機運動模擬装置を示す側面図である。
【図7】本発明の実施の形態6による宇宙機運動模擬装置を示す側面図である。
【図8】本発明の実施の形態7による宇宙機運動模擬装置を示す側面図である。
【発明を実施するための形態】
【0009】
以下、この発明の宇宙機運動模擬装置の実施の形態について説明する。
【0010】
実施の形態1.
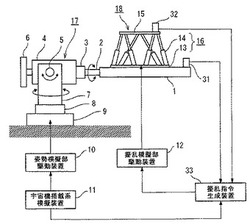
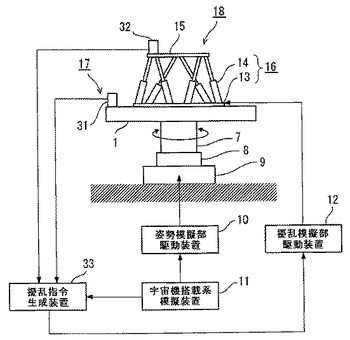
図1はこの発明の実施の形態1による宇宙機運動模擬装置の側面を示す構成図であり、宇宙機運動模擬装置は、姿勢模擬部架台9にモータ等の第1の回転型アクチュエータ8が取り付けられ、第1の回転機構部7は第1の回転型アクチュエータ8に直結されている。モータ等の第2の回転型アクチュエータ5と軸受け(図示しない)は第1の回転機構部7に組み込まれ、第2の回転機構部4は第2の回転型アクチュエータ5と軸受け(図示しない)により支持されている。モータ等の第3の回転型アクチュエータ3は第2の回転機構部4に組み込まれ、第3の回転機構部2は第3の回転型アクチュエータ3に直結しており、第1の搭載機器インタフェース部1は第3の回転機構部2を介して第3の回転型アクチュエータ3に直結されている。また、第2の回転機構部4のバランスを保つためにカウンタウエイト6が第2の回転機構部4に設けられている。
【0011】
宇宙機搭載系模擬装置11により宇宙機姿勢指令値を生成し、その指令値に基づいて姿勢模擬部駆動装置10により第1の回転型アクチュエータ8、第2の回転型アクチュエータ5および第3の回転型アクチュエータ3を駆動することにより、宇宙機姿勢模擬部17を3自由度で回転駆動し、宇宙機の姿勢を模擬する。なお、宇宙機の搭載機器28として光通信アンテナ等の指向軸回りの回転自由度が不要なものは、第3の回転型アクチュエータ3を固定してもよい。
【0012】
第1の搭載機器インタフェース部1上には、擾乱模擬部架台13に圧電アクチュエータや直動モータなどの6個の並進型アクチュエータ14で構成されるパラレルメカニズム16が取り付けられ、パラレルメカニズム16により支持される第2の搭載機器インタフェース部15上に宇宙機の搭載機器28が搭載されている。搭載機器28は、例えばカメラを内蔵した望遠鏡、光通信アンテナ、電波アンテナである。
【0013】
宇宙機搭載系模擬装置11からの擾乱指令値、姿勢模擬部姿勢検出器31からの姿勢模擬部の3自由度姿勢情報、および擾乱模擬部変位・姿勢検出器32からの擾乱模擬部の6自由度情報をもとに、擾乱指令生成装置33により宇宙機擾乱発生指令値を生成し、その指令値に基づいて擾乱模擬部駆動装置12により並進型アクチュエータ14を駆動することにより宇宙機擾乱模擬部18を3自由度並進駆動および3自由度回転駆動し、宇宙機の擾乱を模擬する。擾乱指令生成装置は、姿勢模擬部の3自由度姿勢情報をもとにこれを打ち消すように宇宙機擾乱発生指令値を生成し、宇宙機姿勢模擬部17による擾乱の影響を抑制する。
【0014】
なお、ここではパラレルメカニズム16として並進型アクチュエータで駆動する伸縮型パラレルメカニズムの例を示したが、回転型アクチュエータにより駆動する回転型パラレルメカニズム、あるいは並進型アクチュエータで駆動する直動型パラレルメカニズム、あるいは回転型アクチュエータにより駆動するワイヤ駆動型パラレルメカニズムでもよい。
【0015】
以上説明したように、宇宙機運動模擬装置は、第1の回転機構部7と直結した第1の回転型アクチュエータ8と、第1の回転機構部7に組み込まれた第2の回転型アクチュエータ5と軸受けにより支持される第2の回転機構部4と、第2の回転機構部4に組み込まれた第3の回転型アクチュエータ3と、第3の回転機構部2を介して第3の回転型アクチュエータ3と直結した第1の搭載機器インタフェース部1を備えた宇宙機姿勢模擬部17と、第1の搭載機器インタフェース部1上に、パラレルメカニズム16により6自由度の並進駆動および回転駆動されるように支持され、搭載機器を搭載するための第2の搭載機器インタフェース部15を備えた宇宙機擾乱模擬部18と、宇宙機姿勢模擬部17および宇宙機擾乱模擬部18を作動させる宇宙機搭載系模擬装置11とを備えている。また、宇宙機運動模擬装置は、宇宙機搭載系模擬装置11からの姿勢指令値によって宇宙機姿勢模擬部17を駆動する姿勢模擬部駆動装置10と、宇宙機搭載系模擬装置11からの擾乱生成指令値によって、宇宙機姿勢模擬部17の姿勢および宇宙機擾乱模擬部18の姿勢に基づいて、宇宙機姿勢模擬部17による擾乱の影響を打ち消すように宇宙機擾乱指令値に基づいた擾乱指令値を生成して、擾乱模擬部駆動装置12を作動させる擾乱指令生成装置33とを備えている。宇宙機運動模擬装置はまた、宇宙機姿勢模擬部17の姿勢を検出する姿勢模擬部姿勢検出器31と、宇宙機擾乱模擬部18の姿勢を検出する擾乱模擬部変位・姿勢検出器32とを備えている。
【0016】
このような構成によれば、パラレルメカニズム16により6自由度の並進駆動および回転駆動される宇宙機擾乱模擬部を備えたことにより6自由度の高速駆動ができ、宇宙機姿勢模擬部17と宇宙機擾乱模擬部18を別のアクチュエータで駆動することにより回転可動範囲を大きくでき、宇宙機姿勢模擬部17による姿勢情報と宇宙機擾乱模擬部18による並進3自由度および回転3自由度の変動情報から擾乱指令値を生成する擾乱指令生成装置33を備えたことにより宇宙機姿勢模擬部17による擾乱の影響を抑制し所望の擾乱のみを発生できる。
【0017】
実施の形態2.
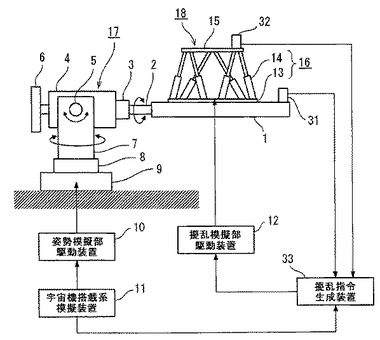
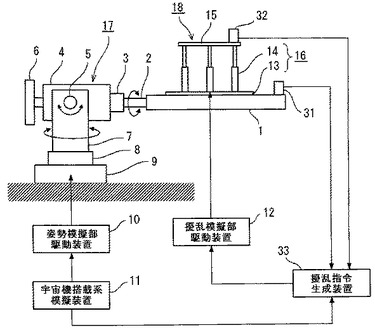
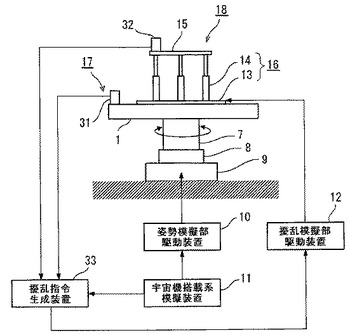
また、図1においては、宇宙機の6自由度の擾乱を模擬するために、宇宙機擾乱模擬部18は6個の並進型アクチュエータ14で構成されるパラレルメカニズムとしている。しかし、例えば並行光を扱う望遠鏡や光通信アンテナなどの搭載機器のように、並進方向の擾乱による影響や光軸周りの回転方向の擾乱による影響がほとんどない場合もある。この場合、図2で示すように、宇宙機擾乱模擬部18は3個の並進型アクチュエータ14で構成される構造としてもよい。宇宙機擾乱模擬部18を上から見た図を図3に示す。図3で示すように、並進型アクチュエータ14を同心円状に120°配置することで、宇宙機擾乱模擬部18は回転2自由度と並進1自由度を有することができる。
【0018】
このような構成によれば、並進型アクチュエータ14を減らすことで宇宙機搭載系模擬装置11の駆動演算処理の負荷を小さくでき、宇宙機擾乱模擬部18の低消費電力化ができ、宇宙機擾乱模擬部18の構造を簡単化できる。
【0019】
実施の形態3.
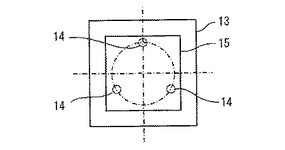
また、図1においては、宇宙機の3自由度の姿勢を模擬するために、宇宙機姿勢模擬部17は3個の回転型アクチュエータ3、5、8で構成されている。しかし、例えば望遠鏡や光通信アンテナなどの搭載機器のように、光軸周りの回転方向の影響がほとんどない場合もある。さらに、宇宙機の姿勢の模擬は回転1自由度で十分な場合もある。そのような場合、図4で示すように、宇宙機姿勢模擬部17は1個の回転型アクチュエータ8で構成される構造としてもよい。また、図4は地面に対して鉛直軸周りの姿勢の回転を模擬する構成としているが、宇宙機運動模擬装置を90°回転させて地面に設置して、地面に対して平行軸周りの姿勢の回転を模擬する構成としてもよい。この構成により、駆動演算処理の負荷を小さくでき、宇宙機姿勢模擬部の小型化、低消費電力化ができ、宇宙機姿勢模擬部の構造を簡単化できる。
【0020】
実施の形態4.
さらには、図4は宇宙機の6自由度の擾乱を模擬するために、宇宙機擾乱模擬部18は6個の並進型アクチュエータ14で構成されるパラレルメカニズムとしているが、図5で示すように宇宙機擾乱模擬部18は3個の並進型アクチュエータ14で構成される構造としてもよい。このような構成によれば、回転型アクチュエータを減らすことで宇宙機搭載系模擬装置11の駆動演算処理の負荷を小さくでき、宇宙機姿勢模擬部17の小型化、低消費電力化ができ、宇宙機姿勢模擬部17の構造を簡単化できる。
【0021】
実施の形態5.
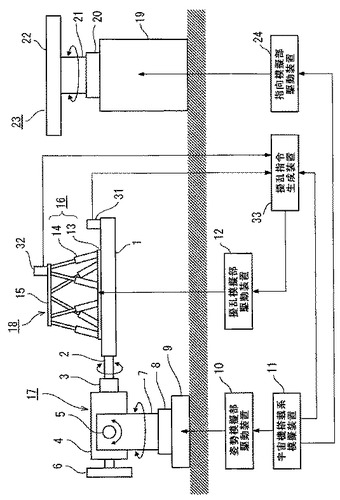
また、図6で示すように、宇宙機運動模擬装置と相手宇宙機指向模擬部23を正対する構成としてもよい。指向模擬部架台19にモータ等の第4の回転型アクチュエータ20が取り付けられ、第4の回転機構部21は相手宇宙機指向装置インタフェース部22に直結している。
【0022】
宇宙機搭載系模擬装置11により相手宇宙機指向角指令値を生成し、その指令値に基づいて指向模擬部駆動装置24により第4の回転型アクチュエータ20を駆動することにより相手宇宙機指向模擬部23を1自由度で回転駆動し、相手側宇宙機の指向角を模擬する。図6は地面に対して鉛直軸周りの姿勢の回転を模擬する構成としているが、相手宇宙機指向模擬部23を90°回転させて地面に設置して、地面に対して平行軸周りの指向角の回転を模擬する構成としてもよい。相手宇宙機指向装置インタフェース部22に搭載される機器は、例えばカメラを内蔵した望遠鏡、光通信アンテナ、電波アンテナである。この構成により、相手宇宙機等からのビームなどの指向角度の変動を模擬することができる。
【0023】
実施の形態6.
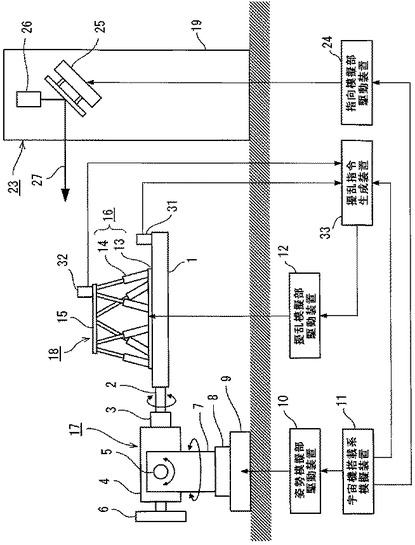
さらには、図6は相手宇宙機の1自由度の指向角の回転を模擬するために、相手宇宙機指向模擬部23は1個の回転型アクチュエータ20で構成されているが、宇宙機搭載機器として光通信アンテナを搭載する場合等は、図7で示すように相手宇宙機指向模擬部23は2自由度の回転駆動が可能な可動鏡25とレーザ発信器26で構成される構造としてもよい。このような構成によれば、相手宇宙機指向模擬部23を備えたことにより少なくとも1自由度の指向角度の変動を模擬することができる。
【0024】
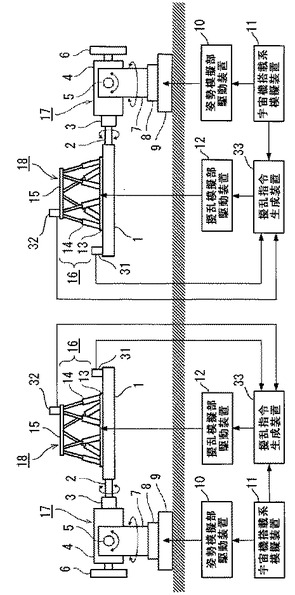
実施の形態7.
また、図8で示すように、宇宙機運動模擬装置を2台正対する構成としてもよい。このような構成によれば、編隊飛行する宇宙機間通信の模擬、あるいは低高度周回軌道宇宙機間通信の模擬、あるいは低高度周回軌道宇宙機−静止宇宙機間通信、あるいは宇宙機−地上局間通信の模擬を実現することができる。
【0025】
以上に図示して説明した宇宙機運動模擬装置は単なる例であって様々な変形が可能であり、またそれぞれの具体例の特徴を全てあるいは選択的に組み合わせて用いることもできる。
【産業上の利用可能性】
【0026】
この発明は宇宙機運動模擬装置に利用できるものである。
【符号の説明】
【0027】
1 第1の搭載機器インタフェース部、2 第3の回転機構部、3 第3の回転型アクチュエータ、4 第2の回転機構部、5 第2の回転型アクチュエータ、6 カウンタウエイト、7 第1の回転機構部、8 第1の回転型アクチュエータ、9 姿勢模擬部架台、10 姿勢模擬部駆動装置、 11 宇宙機搭載系模擬装置、12 擾乱模擬部駆動装置、13 擾乱模擬部架台、14 並進型アクチュエータ、15 第2の搭載機器インタフェース部、16 パラレルメカニズム、17 宇宙機姿勢模擬部、18 宇宙機擾乱模擬部、19 指向模擬部架台、20 第4の回転型アクチュエータ、21 第4の回転機構部、22 相手宇宙機指向装置インタフェース部、23 相手宇宙機指向模擬部、24 指向模擬部駆動装置、25 可動鏡、26 レーザ発信器、27 レーザ光、28 搭載機器、31 姿勢模擬部姿勢検出器、32 擾乱模擬部変位・姿勢検出器、33 擾乱指令生成装置。
【技術分野】
【0001】
この発明は宇宙機運動模擬装置に関するものであり、特に回転駆動される宇宙機姿勢模擬部と、6自由度の並進駆動および回転駆動される宇宙機擾乱模擬部とを備えた宇宙機運動模擬装置に関するものである。
【背景技術】
【0002】
従来の宇宙機運動模擬装置では、二つのリンクがユニバーサルジョイントで接続され一端にはボールジョイントが、他端には回転型アクチュエータが装着してある複数の2リンクアームを備えており、アッパープレートとベースプレートを6つの2リンクアームによって結合し、ベースプレートと2リンクアームとの各結合部分に回転型アクチュエータを配置し、各回転型アクチュエータを駆動することでアッパープレートの位置および姿勢を自由に変化させる構成としている(例えば特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平07−187100号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような宇宙機運動模擬装置にあっては、2リンク機構による並進可動範囲が小さいため、宇宙機の姿勢運動を模擬する場合には、2リンクアームの長さを大きくする必要があり、宇宙機運動模擬装置機構部が大型化するという問題点があった。また、リンク機構のため、姿勢運動を模擬する角度範囲が限定され、衛星の大角度での姿勢運動を模擬しながらかつ衛星の広帯域な微小擾乱環境を模擬することができないという問題点があった。
【0005】
従ってこの発明の目的は、回転可動範囲が広く、かつ衛星の広帯域な微小擾乱環境を模擬できる宇宙機運動模擬装置を得ることを目的としている。
【課題を解決するための手段】
【0006】
この発明に係る宇宙機運動模擬装置は、第1の回転機構部と直結した第1の回転型アクチュエータと、第1の回転機構部に組み込まれた第2の回転型アクチュエータと軸受けにより支持される第2の回転機構部と、第2の回転機構部に組み込まれた第3の回転型アクチュエータと、第3の回転機構部を介して第3の回転型アクチュエータと直結した第1の搭載機器インタフェース部を備えた宇宙機姿勢模擬部と、上記第1の搭載機器インタフェース部上に、パラレルメカニズムにより6自由度の並進駆動および回転駆動されるように支持され、搭載機器を搭載するための第2の搭載機器インタフェース部を備えた宇宙機擾乱模擬部と、上記宇宙機姿勢模擬部および上記宇宙機擾乱模擬部を作動させる宇宙機搭載系模擬装置とを備えた宇宙機運動模擬装置において、上記宇宙機搭載系模擬装置からの姿勢指令値によって上記宇宙機姿勢模擬部を駆動する姿勢模擬部駆動装置と、上記宇宙機搭載系模擬装置からの擾乱生成指令値によって、上記宇宙機姿勢模擬部の姿勢および上記宇宙機擾乱模擬部の姿勢に基づいて、上記宇宙機姿勢模擬部による擾乱の影響を打ち消すように上記宇宙機擾乱指令値に基づいた擾乱指令値を生成して、上記擾乱模擬部駆動装置を作動させる擾乱指令生成装置とを備えたことを特徴とするものである。
【発明の効果】
【0007】
この発明によれば、パラレルメカニズムにより6自由度の並進駆動および回転駆動される宇宙機擾乱模擬部を備えたことにより6自由度の高速駆動ができ、回転型アクチュエータにより回転駆動される宇宙機姿勢模擬部を備えたことにより回転可動範囲を大きくでき、宇宙機姿勢模擬部による姿勢情報と宇宙機擾乱模擬部による並進3自由度および回転3自由度の変動情報とから擾乱指令値を生成する擾乱指令生成装置を備えたことにより宇宙機姿勢模擬部による擾乱の影響を抑制して所望の擾乱のみを発生できる、といった従来にない顕著な効果を奏するものである。
【図面の簡単な説明】
【0008】
【図1】本発明の実施の形態1による宇宙機運動模擬装置を示す側面図である。
【図2】本発明の実施の形態2による宇宙機運動模擬装置を示す側面図である。
【図3】本発明の実施の形態2による宇宙機擾乱模擬部を示す上面図である。
【図4】本発明の実施の形態3による宇宙機運動模擬装置を示す側面図である。
【図5】本発明の実施の形態4による宇宙機運動模擬装置を示す側面図である。
【図6】本発明の実施の形態5による宇宙機運動模擬装置を示す側面図である。
【図7】本発明の実施の形態6による宇宙機運動模擬装置を示す側面図である。
【図8】本発明の実施の形態7による宇宙機運動模擬装置を示す側面図である。
【発明を実施するための形態】
【0009】
以下、この発明の宇宙機運動模擬装置の実施の形態について説明する。
【0010】
実施の形態1.
図1はこの発明の実施の形態1による宇宙機運動模擬装置の側面を示す構成図であり、宇宙機運動模擬装置は、姿勢模擬部架台9にモータ等の第1の回転型アクチュエータ8が取り付けられ、第1の回転機構部7は第1の回転型アクチュエータ8に直結されている。モータ等の第2の回転型アクチュエータ5と軸受け(図示しない)は第1の回転機構部7に組み込まれ、第2の回転機構部4は第2の回転型アクチュエータ5と軸受け(図示しない)により支持されている。モータ等の第3の回転型アクチュエータ3は第2の回転機構部4に組み込まれ、第3の回転機構部2は第3の回転型アクチュエータ3に直結しており、第1の搭載機器インタフェース部1は第3の回転機構部2を介して第3の回転型アクチュエータ3に直結されている。また、第2の回転機構部4のバランスを保つためにカウンタウエイト6が第2の回転機構部4に設けられている。
【0011】
宇宙機搭載系模擬装置11により宇宙機姿勢指令値を生成し、その指令値に基づいて姿勢模擬部駆動装置10により第1の回転型アクチュエータ8、第2の回転型アクチュエータ5および第3の回転型アクチュエータ3を駆動することにより、宇宙機姿勢模擬部17を3自由度で回転駆動し、宇宙機の姿勢を模擬する。なお、宇宙機の搭載機器28として光通信アンテナ等の指向軸回りの回転自由度が不要なものは、第3の回転型アクチュエータ3を固定してもよい。
【0012】
第1の搭載機器インタフェース部1上には、擾乱模擬部架台13に圧電アクチュエータや直動モータなどの6個の並進型アクチュエータ14で構成されるパラレルメカニズム16が取り付けられ、パラレルメカニズム16により支持される第2の搭載機器インタフェース部15上に宇宙機の搭載機器28が搭載されている。搭載機器28は、例えばカメラを内蔵した望遠鏡、光通信アンテナ、電波アンテナである。
【0013】
宇宙機搭載系模擬装置11からの擾乱指令値、姿勢模擬部姿勢検出器31からの姿勢模擬部の3自由度姿勢情報、および擾乱模擬部変位・姿勢検出器32からの擾乱模擬部の6自由度情報をもとに、擾乱指令生成装置33により宇宙機擾乱発生指令値を生成し、その指令値に基づいて擾乱模擬部駆動装置12により並進型アクチュエータ14を駆動することにより宇宙機擾乱模擬部18を3自由度並進駆動および3自由度回転駆動し、宇宙機の擾乱を模擬する。擾乱指令生成装置は、姿勢模擬部の3自由度姿勢情報をもとにこれを打ち消すように宇宙機擾乱発生指令値を生成し、宇宙機姿勢模擬部17による擾乱の影響を抑制する。
【0014】
なお、ここではパラレルメカニズム16として並進型アクチュエータで駆動する伸縮型パラレルメカニズムの例を示したが、回転型アクチュエータにより駆動する回転型パラレルメカニズム、あるいは並進型アクチュエータで駆動する直動型パラレルメカニズム、あるいは回転型アクチュエータにより駆動するワイヤ駆動型パラレルメカニズムでもよい。
【0015】
以上説明したように、宇宙機運動模擬装置は、第1の回転機構部7と直結した第1の回転型アクチュエータ8と、第1の回転機構部7に組み込まれた第2の回転型アクチュエータ5と軸受けにより支持される第2の回転機構部4と、第2の回転機構部4に組み込まれた第3の回転型アクチュエータ3と、第3の回転機構部2を介して第3の回転型アクチュエータ3と直結した第1の搭載機器インタフェース部1を備えた宇宙機姿勢模擬部17と、第1の搭載機器インタフェース部1上に、パラレルメカニズム16により6自由度の並進駆動および回転駆動されるように支持され、搭載機器を搭載するための第2の搭載機器インタフェース部15を備えた宇宙機擾乱模擬部18と、宇宙機姿勢模擬部17および宇宙機擾乱模擬部18を作動させる宇宙機搭載系模擬装置11とを備えている。また、宇宙機運動模擬装置は、宇宙機搭載系模擬装置11からの姿勢指令値によって宇宙機姿勢模擬部17を駆動する姿勢模擬部駆動装置10と、宇宙機搭載系模擬装置11からの擾乱生成指令値によって、宇宙機姿勢模擬部17の姿勢および宇宙機擾乱模擬部18の姿勢に基づいて、宇宙機姿勢模擬部17による擾乱の影響を打ち消すように宇宙機擾乱指令値に基づいた擾乱指令値を生成して、擾乱模擬部駆動装置12を作動させる擾乱指令生成装置33とを備えている。宇宙機運動模擬装置はまた、宇宙機姿勢模擬部17の姿勢を検出する姿勢模擬部姿勢検出器31と、宇宙機擾乱模擬部18の姿勢を検出する擾乱模擬部変位・姿勢検出器32とを備えている。
【0016】
このような構成によれば、パラレルメカニズム16により6自由度の並進駆動および回転駆動される宇宙機擾乱模擬部を備えたことにより6自由度の高速駆動ができ、宇宙機姿勢模擬部17と宇宙機擾乱模擬部18を別のアクチュエータで駆動することにより回転可動範囲を大きくでき、宇宙機姿勢模擬部17による姿勢情報と宇宙機擾乱模擬部18による並進3自由度および回転3自由度の変動情報から擾乱指令値を生成する擾乱指令生成装置33を備えたことにより宇宙機姿勢模擬部17による擾乱の影響を抑制し所望の擾乱のみを発生できる。
【0017】
実施の形態2.
また、図1においては、宇宙機の6自由度の擾乱を模擬するために、宇宙機擾乱模擬部18は6個の並進型アクチュエータ14で構成されるパラレルメカニズムとしている。しかし、例えば並行光を扱う望遠鏡や光通信アンテナなどの搭載機器のように、並進方向の擾乱による影響や光軸周りの回転方向の擾乱による影響がほとんどない場合もある。この場合、図2で示すように、宇宙機擾乱模擬部18は3個の並進型アクチュエータ14で構成される構造としてもよい。宇宙機擾乱模擬部18を上から見た図を図3に示す。図3で示すように、並進型アクチュエータ14を同心円状に120°配置することで、宇宙機擾乱模擬部18は回転2自由度と並進1自由度を有することができる。
【0018】
このような構成によれば、並進型アクチュエータ14を減らすことで宇宙機搭載系模擬装置11の駆動演算処理の負荷を小さくでき、宇宙機擾乱模擬部18の低消費電力化ができ、宇宙機擾乱模擬部18の構造を簡単化できる。
【0019】
実施の形態3.
また、図1においては、宇宙機の3自由度の姿勢を模擬するために、宇宙機姿勢模擬部17は3個の回転型アクチュエータ3、5、8で構成されている。しかし、例えば望遠鏡や光通信アンテナなどの搭載機器のように、光軸周りの回転方向の影響がほとんどない場合もある。さらに、宇宙機の姿勢の模擬は回転1自由度で十分な場合もある。そのような場合、図4で示すように、宇宙機姿勢模擬部17は1個の回転型アクチュエータ8で構成される構造としてもよい。また、図4は地面に対して鉛直軸周りの姿勢の回転を模擬する構成としているが、宇宙機運動模擬装置を90°回転させて地面に設置して、地面に対して平行軸周りの姿勢の回転を模擬する構成としてもよい。この構成により、駆動演算処理の負荷を小さくでき、宇宙機姿勢模擬部の小型化、低消費電力化ができ、宇宙機姿勢模擬部の構造を簡単化できる。
【0020】
実施の形態4.
さらには、図4は宇宙機の6自由度の擾乱を模擬するために、宇宙機擾乱模擬部18は6個の並進型アクチュエータ14で構成されるパラレルメカニズムとしているが、図5で示すように宇宙機擾乱模擬部18は3個の並進型アクチュエータ14で構成される構造としてもよい。このような構成によれば、回転型アクチュエータを減らすことで宇宙機搭載系模擬装置11の駆動演算処理の負荷を小さくでき、宇宙機姿勢模擬部17の小型化、低消費電力化ができ、宇宙機姿勢模擬部17の構造を簡単化できる。
【0021】
実施の形態5.
また、図6で示すように、宇宙機運動模擬装置と相手宇宙機指向模擬部23を正対する構成としてもよい。指向模擬部架台19にモータ等の第4の回転型アクチュエータ20が取り付けられ、第4の回転機構部21は相手宇宙機指向装置インタフェース部22に直結している。
【0022】
宇宙機搭載系模擬装置11により相手宇宙機指向角指令値を生成し、その指令値に基づいて指向模擬部駆動装置24により第4の回転型アクチュエータ20を駆動することにより相手宇宙機指向模擬部23を1自由度で回転駆動し、相手側宇宙機の指向角を模擬する。図6は地面に対して鉛直軸周りの姿勢の回転を模擬する構成としているが、相手宇宙機指向模擬部23を90°回転させて地面に設置して、地面に対して平行軸周りの指向角の回転を模擬する構成としてもよい。相手宇宙機指向装置インタフェース部22に搭載される機器は、例えばカメラを内蔵した望遠鏡、光通信アンテナ、電波アンテナである。この構成により、相手宇宙機等からのビームなどの指向角度の変動を模擬することができる。
【0023】
実施の形態6.
さらには、図6は相手宇宙機の1自由度の指向角の回転を模擬するために、相手宇宙機指向模擬部23は1個の回転型アクチュエータ20で構成されているが、宇宙機搭載機器として光通信アンテナを搭載する場合等は、図7で示すように相手宇宙機指向模擬部23は2自由度の回転駆動が可能な可動鏡25とレーザ発信器26で構成される構造としてもよい。このような構成によれば、相手宇宙機指向模擬部23を備えたことにより少なくとも1自由度の指向角度の変動を模擬することができる。
【0024】
実施の形態7.
また、図8で示すように、宇宙機運動模擬装置を2台正対する構成としてもよい。このような構成によれば、編隊飛行する宇宙機間通信の模擬、あるいは低高度周回軌道宇宙機間通信の模擬、あるいは低高度周回軌道宇宙機−静止宇宙機間通信、あるいは宇宙機−地上局間通信の模擬を実現することができる。
【0025】
以上に図示して説明した宇宙機運動模擬装置は単なる例であって様々な変形が可能であり、またそれぞれの具体例の特徴を全てあるいは選択的に組み合わせて用いることもできる。
【産業上の利用可能性】
【0026】
この発明は宇宙機運動模擬装置に利用できるものである。
【符号の説明】
【0027】
1 第1の搭載機器インタフェース部、2 第3の回転機構部、3 第3の回転型アクチュエータ、4 第2の回転機構部、5 第2の回転型アクチュエータ、6 カウンタウエイト、7 第1の回転機構部、8 第1の回転型アクチュエータ、9 姿勢模擬部架台、10 姿勢模擬部駆動装置、 11 宇宙機搭載系模擬装置、12 擾乱模擬部駆動装置、13 擾乱模擬部架台、14 並進型アクチュエータ、15 第2の搭載機器インタフェース部、16 パラレルメカニズム、17 宇宙機姿勢模擬部、18 宇宙機擾乱模擬部、19 指向模擬部架台、20 第4の回転型アクチュエータ、21 第4の回転機構部、22 相手宇宙機指向装置インタフェース部、23 相手宇宙機指向模擬部、24 指向模擬部駆動装置、25 可動鏡、26 レーザ発信器、27 レーザ光、28 搭載機器、31 姿勢模擬部姿勢検出器、32 擾乱模擬部変位・姿勢検出器、33 擾乱指令生成装置。
【特許請求の範囲】
【請求項1】
第1の回転機構部と直結した第1の回転型アクチュエータと、第1の回転機構部に組み込まれた第2の回転型アクチュエータと軸受けにより支持される第2の回転機構部と、第2の回転機構部に組み込まれた第3の回転型アクチュエータと、第3の回転機構部を介して第3の回転型アクチュエータと直結した第1の搭載機器インタフェース部を備えた宇宙機姿勢模擬部と、
上記第1の搭載機器インタフェース部上に、パラレルメカニズムにより6自由度の並進駆動および回転駆動されるように支持され、搭載機器を搭載するための第2の搭載機器インタフェース部を備えた宇宙機擾乱模擬部と、
上記宇宙機姿勢模擬部および上記宇宙機擾乱模擬部を作動させる宇宙機搭載系模擬装置とを備えた宇宙機運動模擬装置において、
上記宇宙機搭載系模擬装置からの姿勢指令値によって上記宇宙機姿勢模擬部を駆動する姿勢模擬部駆動装置と、
上記宇宙機搭載系模擬装置からの擾乱生成指令値によって、上記宇宙機姿勢模擬部の姿勢および上記宇宙機擾乱模擬部の姿勢に基づいて、上記宇宙機姿勢模擬部による擾乱の影響を打ち消すように上記宇宙機擾乱指令値に基づいた擾乱指令値を生成して、上記擾乱模擬部駆動装置を作動させる擾乱指令生成装置とを備えたことを特徴とする宇宙機運動模擬装置。
【請求項2】
上記宇宙機姿勢模擬部の姿勢を検出する姿勢模擬部姿勢検出器と、上記宇宙機擾乱模擬部の姿勢を検出する擾乱模擬部変位・姿勢検出器とを備えたことを特徴とする請求項1に記載の宇宙機運動模擬装置。
【請求項3】
宇宙機擾乱模擬部は3個のアクチュエータで構成したことを特徴とする請求項1あるいは2に記載の宇宙機運動模擬装置。
【請求項4】
宇宙機姿勢模擬部は1個の回転型アクチュエータで構成したことを特徴とする請求項1〜3のいずれか一項に記載の宇宙機運動模擬装置。
【請求項5】
宇宙機姿勢模擬部と宇宙機擾乱模擬部と相手宇宙機指向模擬部で構成したことを特徴とする請求項1〜4のいずれか一項に記載の宇宙機運動模擬装置。
【請求項6】
宇宙機運動模擬装置を2台正対する構成としたことを特徴とする請求項1〜5のいずれか一項に記載の宇宙機運動模擬装置。
【請求項1】
第1の回転機構部と直結した第1の回転型アクチュエータと、第1の回転機構部に組み込まれた第2の回転型アクチュエータと軸受けにより支持される第2の回転機構部と、第2の回転機構部に組み込まれた第3の回転型アクチュエータと、第3の回転機構部を介して第3の回転型アクチュエータと直結した第1の搭載機器インタフェース部を備えた宇宙機姿勢模擬部と、
上記第1の搭載機器インタフェース部上に、パラレルメカニズムにより6自由度の並進駆動および回転駆動されるように支持され、搭載機器を搭載するための第2の搭載機器インタフェース部を備えた宇宙機擾乱模擬部と、
上記宇宙機姿勢模擬部および上記宇宙機擾乱模擬部を作動させる宇宙機搭載系模擬装置とを備えた宇宙機運動模擬装置において、
上記宇宙機搭載系模擬装置からの姿勢指令値によって上記宇宙機姿勢模擬部を駆動する姿勢模擬部駆動装置と、
上記宇宙機搭載系模擬装置からの擾乱生成指令値によって、上記宇宙機姿勢模擬部の姿勢および上記宇宙機擾乱模擬部の姿勢に基づいて、上記宇宙機姿勢模擬部による擾乱の影響を打ち消すように上記宇宙機擾乱指令値に基づいた擾乱指令値を生成して、上記擾乱模擬部駆動装置を作動させる擾乱指令生成装置とを備えたことを特徴とする宇宙機運動模擬装置。
【請求項2】
上記宇宙機姿勢模擬部の姿勢を検出する姿勢模擬部姿勢検出器と、上記宇宙機擾乱模擬部の姿勢を検出する擾乱模擬部変位・姿勢検出器とを備えたことを特徴とする請求項1に記載の宇宙機運動模擬装置。
【請求項3】
宇宙機擾乱模擬部は3個のアクチュエータで構成したことを特徴とする請求項1あるいは2に記載の宇宙機運動模擬装置。
【請求項4】
宇宙機姿勢模擬部は1個の回転型アクチュエータで構成したことを特徴とする請求項1〜3のいずれか一項に記載の宇宙機運動模擬装置。
【請求項5】
宇宙機姿勢模擬部と宇宙機擾乱模擬部と相手宇宙機指向模擬部で構成したことを特徴とする請求項1〜4のいずれか一項に記載の宇宙機運動模擬装置。
【請求項6】
宇宙機運動模擬装置を2台正対する構成としたことを特徴とする請求項1〜5のいずれか一項に記載の宇宙機運動模擬装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−285057(P2010−285057A)
【公開日】平成22年12月24日(2010.12.24)
【国際特許分類】
【出願番号】特願2009−139870(P2009−139870)
【出願日】平成21年6月11日(2009.6.11)
【出願人】(000006013)三菱電機株式会社 (33,312)
【公開日】平成22年12月24日(2010.12.24)
【国際特許分類】
【出願日】平成21年6月11日(2009.6.11)
【出願人】(000006013)三菱電機株式会社 (33,312)
[ Back to top ]