
宇宙船の位置を推定するシステムおよび方法
宇宙船(6)の位置を推定するためのシステムが開示される。このシステムは、宇宙船(6)から送信された信号を受信するための受信局(4)および受信局(4)からのデータを受信するための処理局(2)を含む。各受信局(4)は、宇宙船(6)から送信される信号を記録ウィンドウ(8)の期間中に記録して、記録ウィンドウ(8)の期間中に記録された信号を表すデータを処理局(2)へ送信する。受信局(4)のそれぞれに関連した記録ウィンドウ(8)は、互いにオフセットされ、かつ/または別々のサイズである。処理局(2)は、宇宙船(6)と複数の受信局のそれぞれとの距離間の差を推定して宇宙船(6)の位置を推定するために、記録された信号の相関をとる。方法、受信局(4)、処理局(2)およびコンピュータプログラムも開示される。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、宇宙船の位置、特に地球を周回する人工衛星の位置を推定するためのシステムに関する。本発明は、宇宙船位置を推定する方法、宇宙船位置の推定に関与するための受信局および処理局、ならびに宇宙船位置の推定に関与するための受信局または処理局上で実行されるコンピュータプログラムにも関する。本発明は、宇宙船位置の追跡にも関する。
【背景技術】
【0002】
人工衛星の任意の時点における軌道の割出しおよび情報は、人工衛星の操作員にとって高度に重要なことである。軌道は、測定によって求められた位置推定から導出され得る。例えば、静止衛星は、地球を回る地球静止軌道にある弧上の決められた経度の位置にほぼ計画通りに位置付けられる(すなわち計画または構想に従って位置付けられる)。
【0003】
さらに、衛星位置推定システムによって、操縦の正確な評価が可能になる。操縦の評価は、人工衛星に搭載された限りある量の燃料を経済的に(すなわち控え目に)使う目的に留意した立案および実施された操縦の、軌道に対する効果の監視を含む。静止衛星を決められた経度上に保つのに操縦がことさら必要である。このことによって、人工衛星の非等方性アンテナによる信頼性の高い電気通信の受信および送信が可能になる。地球静止軌道が、ことさら月および太陽の重力によって不安定であるので、そのような操縦が必要である。例えば人工衛星のドリフトと称されるその経度の位置ならびにその傾斜角または離心率を修正するために、人工衛星の軌道を制御されたやり方で変化させるのに操縦が実行される。
【0004】
複数の人工衛星を1つの軌道経度上の共同の位置に置いて運用する場合には、様々な人工衛星間で経度、傾斜角および離心率の小さな分離の組合せが存在する。このシナリオは複雑であり、各人工衛星に関して連続的かつ疑似的なリアルタイムの位置推定および軌道の割出しを必要とする。
【0005】
正確な位置推定は、静止衛星に加えて、いかなるタイプの人工衛星または宇宙船にとっても、それらの使途のタイプまたは軌道にかかわらず、不可欠かつ適用可能なものである。
【0006】
衛星位置は、往復遅延を測定することによって求めることができる。往復遅延の測定は、地上送信局から人工衛星へ信号を送信して人工衛星から地上受信局へ戻し、地上送信局からの信号の送信と地上受信局でのその受信との間の経過時間を測定することを意味する。以下の方法のどれもが、各地上局の位置は正確に知られているものと想定する。
【0007】
既知の、いわゆる三辺測量法は、それぞれが基準信号を送受信することができる3つの地上局を含む。一般に、各局は、単独での人工衛星への基準信号の送信と、人工衛星による中継後の人工衛星からの戻り信号の受信との間の遅延を独立して測定する。並行してこの動作を遂行する3つの局の組が、3つの局から人工衛星への3つの絶対距離測定をもたらし、その結果、人工衛星の位置が計算可能になる。
【0008】
あるいは、三辺測量法は、疑似測位法(pseudo-ranging method)に変換することができる。この方法では、往復遅延は、別々に測定されるのではなく、1つの地上局だけが単一の基準信号を伝送して地上局間で連帯して測定される。この第1の地上局は、人工衛星から戻る信号を受信する。他の局も、第1の地上局によって人工衛星へ送信された単一の基準信号を人工衛星から受信する。したがって、他の地上局と人工衛星との間の距離が間接的に計算される。
【0009】
疑似測位法は地上局間に共通の時刻基準を必要とするが、前述の三辺測量法は必ずしも必要としない。
【0010】
衛星位置の推定は、3つの球体の交差問題(three-sphere intersection problem)を解くこと、またはD. E. Manolakis、「Efficient solution and performance analysis of 3-D position estimation by trilateration」、IEEE trans. on Aerospace & Electronic Systems、Vol. 32、No. 1996年10月4日、1239〜1248頁に説明されているアルゴリズムなどを使うことにより実行することができる。
【0011】
人工衛星などの宇宙船の位置を推定するシステムおよび方法の改善に関する不変の必要性がある。
【0012】
(語句に関する注記)
本発明を要約する前に、本明細書の慣用句「および/または」の用法を説明する。
【0013】
各場合において、慣用句「および/または」は、それによって連結された事項、特徴または文節が、一緒にもしくは個々に引用されることを示すように用いられ、したがって列挙または特定された3つの実施形態をもたらす。換言すれば、「AおよびB」は2つの事項、特徴、または文節であり、表現「Aおよび/またはB」は、「AおよびB」、「A」および「B」の3つの代替案を対象として含む。
【0014】
(例えば請求項、または請求項およびその従属請求項のうちの1つで)表現「Aおよび/またはB」が最初に用いられ、次に表現「前記Aおよび/または前記B」用いられるとき、これは、
- 最初の「AおよびB」ならびに次の「前記Aおよび前記B」と、
- 最初の「AおよびB」ならびに次の「前記A」と、
- 最初の「AおよびB」ならびに次の「前記B」と、
- 最初の「A」および次の「前記A」と、
- 最初の「B」および次の「前記B」との5つの代替案を対象として含む。
【0015】
慣用句「および/または」のさらなる使用はこれらの原則に従って理解されることになり、矛盾した組合せは対象として含まれない。例えば「Aおよび/またはB」に「Cおよび/またはD」が続くとき、各表現が3つの代替案を対象として含み、したがって9つの代替案を対象として含む。しかし、例えば、「C」が「Aの特性」の代用語であり、また「D」が「Bの特性」の代用語であるとき、「Aおよび/またはB」に「Cおよび/またはD」が続くと、5つの代替案しか対象として含まないことが理解されよう。
【先行技術文献】
【特許文献】
【0016】
【特許文献1】米国特許出願公開第2004/0140930号
【非特許文献】
【0017】
【非特許文献1】D. E. Manolakis、「Efficient solution and performance analysis of 3-D position estimation by trilateration」、IEEE trans. on Aerospace & Electronic Systems、Vol. 32、No. 1996年10月4日、1239〜1248頁
【発明の概要】
【発明が解決しようとする課題】
【0018】
本発明は、衛星位置などの宇宙船位置を推定するためのシステムおよび方法を改善することにより、前述の必要性を満たすことを目的とする。
【課題を解決するための手段】
【0019】
本発明によれば、宇宙船位置を推定するためのシステムが提供される。このシステムは、宇宙船から送信された信号を受信するように構成された複数の受信局、および複数の受信局からデータを受信するように構成された処理局を含む。受信局のそれぞれが、宇宙船から送信された信号を、本明細書で記録ウィンドウと称される時間ウィンドウの期間中に記録して、記録ウィンドウの期間中に記録された信号を表すデータを処理局へ送信するように構成される。各受信局に関連した記録ウィンドウは、互いにオフセットするように、かつ/または別々のサイズ(すなわち別々の長さまたは期間)に構成される。処理局は、宇宙船と複数の受信局の中の少なくとも1つの対の各受信局との距離間の差を推定し、それに基づいて宇宙船位置を推定するために、記録された信号の相関をとるように構成される。
【0020】
したがって、第1の代替案では、受信局のそれぞれに関連した記録ウィンドウが、互いにオフセットされるように構成される。第2の代替案では、受信局のそれぞれに関連した記録ウィンドウが、互いに異なるサイズに構成される。第3の代替案では、受信局のそれぞれに関連した記録ウィンドウが、互いにオフセットされ、かつ異なるサイズに構成される。
【0021】
次に、このことをより詳細に説明する。複数の受信局は、宇宙船から送信された無線周波数信号を受信するように構成される。複数の受信局のそれぞれが、記録ウィンドウの期間中、宇宙船から送信された無線周波数信号を記録する。
【0022】
受信局のうちの2つを考える。2つの受信局のそれぞれが、記録ウィンドウまたは記録期間を通じてエアインターフェイスの上の宇宙船から来る無線周波数信号のシーケンスを記録する。記録ウィンドウの開始および終了は、2つの受信局に共通の時刻基準を参照して知られる。次に、2つの受信局で記録された無線周波数信号のシーケンスが、両方とも処理局へ送信される。2つの受信局のそれぞれから送信される無線周波数信号のシーケンスに対応する記録ウィンドウの開始および終了に関する情報は、処理局によって演繹的に知られる、もしくは受信局によって処理局へ送信される。宇宙船から、無線周波数信号のシーケンスがいつ送信されるかということに関する情報は、処理局では必要とされない。同様に、無線周波数信号のシーケンスの性質に関する情報は、処理局では必要とされない。処理局は、既知の共通の時刻基準を参照して、2つのそれぞれの記録ウィンドウの期間中に2つの受信局で受信して記録された無線周波数シーケンスの一部分の到着の時間差(TDOA)を求める。
【0023】
第1の受信局と第2の受信局との無線周波数シーケンスの到着の時間差は、宇宙船と第1の受信局との距離と、宇宙船と第2の受信局との距離との間の差に相当する。この時間差すなわちシフトは、処理局において、2つの無線周波数信号シーケンスの相関をとることにより求められる。相関のピークが、時間差すなわちシフトに相当する。
【0024】
第1および第2の受信局で受信して記録された対の無線周波数シーケンスの相関をとることにより、宇宙船と第1および第2の受信局との距離間の差を、伝播媒体の特性を考慮して求めることができる。対の記録された無線周波数シーケンスに対応する記録ウィンドウの範囲内に、宇宙船から送信されて第1および第2の受信局が受信した元の無線周波数シーケンスの同一の部分がオーバラップする期間がなくてはならない。宇宙船は、宇宙船と第1および第2の受信局との距離間の差が一定である空間における点集合に相当する2つの(two-sheeted)双曲面上に位置付けられる。
【0025】
同一の時点、または実質的に同一の時点で同一の処理を繰り返すことによって、第2の対の受信局、および必要に応じて第3の対の受信局に対して、宇宙船が位置付けられ得る2つの他の双曲面を求めることができる。宇宙船は、これらの双曲面の交点にあると推定することができる。
【0026】
上記で説明されたように、記録された信号は、処理局において対で相関をとられる。双曲面の交点の識別が、宇宙船位置の推定をもたらす。3次元双曲線の位置決めとしても知られているこの処理は、実際に記録された信号シーケンスを処理局へ送信する必要がある。また、有効な相関ピークを得るために、信号シーケンスは十分に長い記録ウィンドウにわたって記録する必要がある。相関処理利得は、サンプリング時間を掛けた有効な信号帯域幅から導出する。
【0027】
この方法は、物理的な層上の、もしくは変調されたペイロードにカプセル化された基準信号パターンを、宇宙船から送信する必要がないという点で有利である。この方法は、受信局での記録を可能にするのに、宇宙船はいかなるトリガシーケンスも発する必要がない。さらに、宇宙船を特別に適合させる必要はない。この意味で、この方法は受動的である。この方法は、協働する宇宙船を必要としない。宇宙船に要求されるのは、受信局によって検出され得る何らかの電磁気信号を送信することだけである。とは言うものの、この方法は、受信局での記録を可能にするように宇宙船によって発せられた基準信号パターンおよびトリガシーケンスに対処し、かつこれらを利用することができる。
【0028】
そのような方法およびシステムを設計するとき、有効な相関をもたらすために、宇宙船と第1および第2の各受信局との距離間の差を考慮に入れた十分な長さを有し、同時に元の送信されたシーケンスに対して十分なオーバラップ時間をさらに含むウィンドウの記録に対応する記録された信号シーケンスを送信する必要性が生じる。そのような必要性を満たす方法またはシステムを実施すると、各受信局と処理局との間の通信リンクに対する負荷がかなり増加する可能性があることが、現在理解されている。
【0029】
これは、例えば操縦を適切かつ適時に制御するために、連続した頻繁な位置推定が必要とされる宇宙船の位置追跡が実行される場合に特に当てはまることがさらに理解されている。処理の角度分解能および宇宙船位置の推定精度を向上させるために、受信局を互いに遠く離して(例えば500キロメートルを上回る距離を隔てて)配置することが好まれる。したがって、各受信局と処理局との間の距離が大きくなり得て、その結果、受信局と処理局との間に見通し線が存在しない。これによって、記録されたシーケンスの送信によってもたらされるネットワーク負荷がさらに増加する。
【0030】
計画的な、かつ制御されたやり方で、記録ウィンドウをオフセットさせることにより、処理局へ送信されるデータ量が低減される。それに加えて、あるいはその代わりに(したがって3つの代替案をもたらしている)、計画的な、かつ制御されたやり方で、各記録ウィンドウのサイズを個々に設定することにより、その結果、記録ウィンドウは互いに異なるサイズを有するように構成され、処理局へ送信されるデータ量も低減される。(共通時刻基準に対して)同一の記録ウィンドウの期間中、各受信局で受信信号シーケンスを記録するのでなく、記録ウィンドウが互いにオフセットされ、かつ/または異なるサイズに設定される。いくつかの実施形態において、記録ウィンドウ間のオフセットおよび/または各ウィンドウの個々のサイズがどのように計算されるかということは、図面(例えば図3b)を参照した特定の実施形態の詳細な説明から明らかになるであろう。
【0031】
米国特許出願公開第2004/0140930号(本明細書では「特許文献1」と称される)に開示されている測位システムも、宇宙船位置の推定に関するものである。本発明をよりよく理解するために、特許文献1と本発明のシステムおよび方法との間の差異を強調するのは興味深いことである。特許文献1のシステムでは、宇宙船と少なくとも3つの受信局のそれぞれとの間の距離が、受信局で求められる。求められた距離値が中央処理局へ送信され、それに基づいて宇宙船位置が推定される。推定は、距離値に対する三辺測量計算に基づくものである。
【0032】
特許文献1の一実施形態では、その図6に示されるように、送信局(図6の数字605)および受信局(図6の数字613)は、1つの距離測量をもたらす往復遅延(発信時刻と受信時刻との間の差)をもたらすように連帯で用いられる。
【0033】
本発明では、2つの受信局で実際に記録された信号が対で処理局へ送信され、そこで相関をとられる点で、本発明は特許文献1と著しく異なる。また、本発明は、記録信号の送信によってもたらされるネットワーク上の負荷を低減するために、各受信局で、記録ウィンドウ間の制御された時間オフセットおよび/または記録ウィンドウの個々のサイズ設定を用いる。特許文献1では、記録ウィンドウをオフセットさせるステップおよび/またはサイズを設定するステップは、どちらも開示されておらず、必要とさえされていない。測位システムによってもたらされるネットワーク上の負荷を低減する問題は特許文献1では生じない、というのは、実際に受信して記録された信号が、受信局で記録された信号コピーの時間差を計算するためにネットワーク上で中央処理局へ送信されるわけではないからである。距離値および時間スタンプ(例えば特許文献1の図6における発信時刻および受信時刻の1つ)だけが送信される。
【0034】
本発明の前述の実施形態では、記録ウィンドウは、互いに時間でオフセットされ、かつ/またはサイズが異なるように構成される。これは、2つの記録ウィンドウ間の値「0」に近い臨時の時間オフセット(例えば2つの記録ウィンドウの開始の間のオフセット)を除外しないことを当業者なら理解するであろう。同様に、これは、2つの記録ウィンドウ間の臨時のほぼ等しいサイズを除外しない。本発明の態様は、記録ウィンドウが時間でオフセットされる、かつ/または互いにサイズが異なるように構成されることにあり、処理局へ送信されるデータ量を低減するために、構成の観点から、意図的に、かつ制御されたやり方で、記録ウィンドウをオフセットさせる、かつ/またはそのサイズを個々に変化させるように位置決めシステムの容量を反映する。計画的で制御されたオフセットおよび/またはサイズ設定は、第1の受信局と宇宙船との間および第2の受信局と宇宙船との距離間の差の演繹的な情報に基づくものである。
【0035】
1対の受信局に関連したオフセットは、共通の時刻基準に対するオフセットである。一実施形態では、受信局には、互いに同期したクロックが備わっている。
【0036】
一実施形態では、いくつかの受信局は、互いに対して時間的に同期しない。受信局のうちいくつかはコンポーネントおよび構成も異なってもよく、したがって各局の個々の固有の遅延によって、互いに対する時間オフセットがもたらされる。受信局の間の非同期の量は処理局によって知られており、その結果、処理局は有意義な(時刻基準の観点から有意義な)オフセット命令を送信することができる。換言すれば、時刻同期がなく、かつ/または受信局間でコンポーネントおよび構成に差異があったとしても、処理局が時刻非同期または受信局間のコンポーネントおよび構成の差異の範囲を知っている限り、処理局は、この非同期ならびにコンポーネントおよび構成の差異を考慮に入れることができ、有意義な相関のために、受信局に対するウィンドウのオフセットおよび/またはサイズの命令を適切に生成して(もしくは命令を起動して)、結果(記録されたデータ)を適切に処理する。
【0037】
本発明によって解決される問題は、宇宙船位置の割出しにとって重要であり、航空交通管制の状況などにおける飛行機位置の割出しに直接適用されることはない(または少なくとも適用するのが非常に困難である)。航空交通管制では、受信局は数キロメートル(50キロメートルを超える距離)離れて配置されるだけであり、受信局と中央処理局との間に見通し線が得られることも多い。さらに、飛行機の瞬時位置は、受信局の受信半径によって対象として含まれる地理的区域のどこかにあり得る。また、飛行機の径路は、高度または方向において非常に動的であって予測不能なことがある。記録ウィンドウをオフセットさせ、かつそのサイズを変化させることが、宇宙船、特に静止衛星に固有の問題を解決する。このことは、受信局の幾何学的配置(互いに、好ましくは500キロメートルより遠く離れた配置)ならびに人工衛星が地球表面の36000キロメートル上の静止軌道または疑似静止軌道にあるという事実と結び付けて考えられる(かなり適切に人工衛星の位置を予測することができる)。受信局と人工衛星との間にかなりの距離があるために、衛星信号の到着時間は、優れた相関ピークを得るのに必要な正味の時間的ウィンドウサイズよりはるかに大きい。記録ウィンドウをオフセットさせ、かつ/またはそのサイズを変化させると、ウィンドウサイズのオーバヘッドが最適化され、中央処理局へ大きなデータ量を伝達する問題が対処される。
【0038】
特定の実施形態では、宇宙船は特定の「ボックス」内にあるように制限される。ボックスは、疑似静止軌道の弧でよく、したがって宇宙船があり得る位置を制限し、これを、別々の受信局向けに受信局と宇宙船との距離間の差ならびにウィンドウサイズおよび時間オフセットへと直接変換する。
【0039】
一実施形態では、受信局のうちの1つが処理局と共に配置される。
【0040】
一実施形態では、受信局から処理局に送信されたデータが、送信のためにデジタル化される。これによってシステムの信頼性が向上する。
【0041】
一実施形態では、処理局による相関は、記録された信号対の相関をとるステップと、2つのコピー間の時間シフトを表す相関ピーク位置を検出するステップと、各対に対応する3次元双曲線または2つの双曲面を計算するステップと、宇宙船位置である同双曲面の交点を計算するステップとを含む。2つを上回る双曲面の交点が1つの点をもたらさない場合に対処するために、この計算は、最も近い(最も可能性の高い)交点、したがって宇宙船位置を見いだすために、例えば最小2乗法を含めて最適化を含むことができる。
【0042】
一実施形態では、処理局による相関は、記録された信号対の相関をとるステップと、2つの信号コピー間の時間シフトを表す相関ピーク位置を検出するステップと、人工衛星から位置が既知のそれぞれの受信局への信号のランタイムにおける結果として生じる差を計算するステップとを含む。このデータは、宇宙船位置を計算する個別のシステムに供給される。
【0043】
一実施形態では、複数の受信局のそれぞれのクロックが同期する。
【0044】
一実施形態では、2つの受信局に関連した記録ウィンドウ間のオフセットおよび/または記録ウィンドウのそれぞれのサイズが、宇宙船の位置および2つの受信局の位置に関する情報に基づいて計算されるように構成される。時間オフセットおよび/またはウィンドウサイズは、処理局によって計算されてよい。
【0045】
一実施形態では、2つの受信局に関連したそれぞれのウィンドウサイズおよび/または記録ウィンドウ間の時間オフセットが、それぞれの受信局によって演繹的に知られるように構成され、処理局によって与えられる必要はない。
【0046】
一実施形態では、このシステムは、宇宙船位置を推定するだけでなく、長時間にわたってその位置を追跡する働きをする。この実施形態では、2つの受信局に関連した記録ウィンドウ間のオフセットが、処理局自体よって(1つまたは複数のステップだけ以前の操縦ステップで)推定された宇宙船位置の情報に基づいて、もしくは(同オフセットが、あらかじめ宇宙船位置の情報に基づいて既に計算されている場合)さらに基づいて計算されるように構成される。
【0047】
一実施形態では、長時間にわたる宇宙船位置の追跡は、ウィンドウのオフセットおよび/またはサイズの設定の予測によって表された演繹的な情報を用いることにより、各受信局によって独立して管理され、処理局によって供給される必要はない。
【0048】
追跡ループすなわちフィードバックループは、以下のようにもたらされ得る。あらかじめ得られた宇宙船位置または受信局と宇宙船との距離間の差の情報に基づいて(宇宙船位置は必ずしも必要ではなく、受信局対に関する距離/時間差がフィードバックループに十分であり、その結果、この処理は、分離した1対の受信局に対しても機能する)、また受信局の位置の所定の情報に基づいて、処理局は、ウィンドウのオフセットおよび/またはサイズの設定の命令を受信局へ送信する。
【0049】
用語「距離(range)」は、本明細書では宇宙船(または一実施形態では人工衛星)と受信局との間の隔たりを指す。
【0050】
各受信局が、処理局から受信したウィンドウのオフセットおよび/またはサイズの設定の命令に基づいて、宇宙船から受信した信号シーケンスを記録し、同シーケンスは処理局へ送信される。処理局は、新しく記録された信号シーケンスを受信する。処理局は、宇宙船位置の推定を再計算すなわち更新し、受信局と宇宙船との距離間の差を再計算して、最後に、送信されるべき新規のウィンドウのオフセットおよび/またはウィンドウサイズを計算する。次いで、再び追跡ループが実行される。本システムおよび方法により、通信リンク上で受信局と処理局との間を送信されるべきデータ量を著しく低減することができる。
【0051】
記録ウィンドウのサイズは、宇宙船位置についての演繹的な情報についての精度の度合いにことさら基づいて、処理局によって適合および制御され得る。この実施形態では、処理局は、オフセット命令だけでなくウィンドウサイズの命令も受信局へ送信する。オフセット命令は記録ウィンドウの開始を決定し、サイズ命令はそのサイズを決定する。一実施形態では、記録ウィンドウサイズが適合されるのではなく、例えば人工衛星の1日にわたる、または操縦後の半径方向運動によってもたらされる時間差異、あるいは大気によって導入される遅延の変動を含むシステムの未知のすべてまたは大部分の時間関連パラメータを考慮に入れて、前もって求められる。
【0052】
オフセットおよび任意選択で記録ウィンドウサイズを求めるための、衛星位置の追跡と過去の位置情報を効率的な利用には、密接な相互関係がある。
【0053】
一実施形態では、追跡はリアルタイムで実行される。「リアルタイム」は、ここでは、迅速で成功する操縦評価を可能にするためのシステム応答に関する運用上のデッドラインを意味する。リアルタイムの追跡および位置制御は、人工衛星に搭載されたエンジンを使用する位置制御および操縦に重要なものであり得る。
【0054】
一実施形態では、毎秒1回の記録動作の割合が受信局で用いられ、追跡のための1つの位置推定がもたらされる。一実施形態では、0.1秒につき1回の記録動作と24時間につき1回の記録動作との間に含まれる割合が、追跡に用いられる。
【0055】
ウィンドウ追跡を用いるとき、相関ピークの位置が検出され、ウィンドウは、次の反復のために、内容におけるそれぞれのオーバラップを最大化し、したがって信号間の時間差を追跡するようにオフセットされる。人工衛星のそのような追跡のための位置予測は可能である、というのは、人工衛星が、受信局に対して比較的ゆっくりした一定の運動を一般に長時間にわたって受けるからである。
【0056】
追跡が用いられる一実施形態では、オフセットは、第1の記録動作から導出した推定された宇宙船位置に基づいて第1の記録動作と第2の記録動作との間に計算されるように構成される。第1および第2の記録動作は、例えば0.1秒から12時間だけ分離され得る。第1および第2の記録動作は、2つの連続した記録動作でよい。
【0057】
一実施形態では、受信局の少なくとも1つは宇宙船の主ローブダウンリンクのフットプリントの外部に配置される。この設定は、地球上の限定された領域に向けて通信する狭い放射ビームパターンを用いる非等方性すなわち指向性のアンテナを使用した宇宙船の位置を推定するのに特に好都合に適合し、同時に、受信局を互いに十分遠く離すことが可能になり、宇宙船位置を求めるのに優れた角度分解能をもたらす。受信局が互いから遠ければ遠いほど、分解能はより優れたものになる。
【0058】
このことを、以下でさらに説明する。このシステムは、記録された信号の相関をとることに基づくものである。したがって、相関法の固有の処理利得のために、相関利得が記録ウィンドウのサンプリング時間を掛けた信号帯域幅の積によって最初に求められるので、相関処理では低S/N(信号対ノイズ)比またはマイナスのS/N比を有する信号が用いられ得る。したがって、個別信号の低S/N比またはマイナスのS/N比を補償するために相関利得が用いられ、相関は依然として有効なピークをもたらすことができる。
【0059】
一実施形態では、各記録ウィンドウは十分に短い期間を有し、その結果、ドップラー効果、大気の影響(歪みをもたらす恐れがある)および受信局の受信フロントエンドの不完全性が、処理局による相関に深刻な影響を及ぼすことがなく、換言すれば、その結果、ドップラー効果、大気によって誘起される歪みおよび受信局のフロントエンドの不完全性によってもたらされる周波数シフトが、相関処理に深刻な影響を及ぼすことはない。
【0060】
一実施形態では、記録ウィンドウのうち少なくとも1つは、4マイクロ秒と10ミリ秒の間に含まれるサイズを有する。一実施形態では、各記録ウィンドウが、4マイクロ秒と10ミリ秒との間に含まれるサイズを有する。これらの実施形態は、宇宙船の適用に関して、有効な相関ピークを得るために十分に長い記録ウィンドウを有することと、受信局と処理局との間の通信リンク上の負荷を低減するために十分に短い記録ウィンドウを有することとの優れた折衷をもたらす。
【0061】
一実施形態では、非静止衛星の位置が推定される。
【0062】
一実施形態では、受信局から処理局へ送信されるデータは、ウィンドウに関する任意の形式のタイミング情報を含む。
【0063】
本発明は、宇宙船から送信される信号を受信するように構成された複数の受信局、および複数の受信局からデータを受信するように構成された処理局を使用して宇宙船位置を推定する方法にも関する。この方法は、記録および送信のプロシージャおよび相関プロシージャを含む。記録および送信のプロシージャは、宇宙船から送信された信号を記録ウィンドウの期間中に各受信局によって記録するステップと、記録ウィンドウの期間中に記録された信号を表すデータを、各受信局によって処理局へ送信するステップとを含む。各受信局に関連した記録ウィンドウは、互いにオフセットされる、かつ/または別々のサイズ(すなわち長さまたは期間)である。相関プロシージャは、宇宙船と複数の受信局の中の少なくとも1つの対の各受信局との距離間の差を推定し、それに基づいて宇宙船位置を推定するために、処理局で、記録された信号の相関をとるステップを含む。
【0064】
本発明は、宇宙船位置の推定に関与する受信局にも関する。受信局は、第1の受信器、第2の受信器、記録器、および送信器を含む。第1の受信器は、宇宙船から送信された信号を受信するように構成される。第2の受信器は、処理局から、記録ウィンドウの開始命令としてのトリガ時間の指示および/または記録ウィンドウサイズの命令としてウィンドウサイズの指示を受信するように構成される。記録器は、宇宙船から送信して受信された信号のトリガ時間の指示および/またはウィンドウサイズの指示に従って開始される記録ウィンドウの期間中、記録をとるように構成される。送信器は、記録ウィンドウの期間中に記録された信号を表すデータを処理局へ送信するように構成される。
【0065】
本発明は、宇宙船位置の推定に関与する処理局にも関する。処理局は、送信器、受信器および相関器を備える。送信器は、記録ウィンドウの開始を指すトリガ時間の指示および/または記録ウィンドウサイズの命令としてのウィンドウサイズ指示を、宇宙船から送信される信号を受信するように構成された複数の受信局のそれぞれへ送信するように構成される。受信器は、宇宙船から送信されて記録ウィンドウの期間中に記録された信号を表すデータを、複数の受信局のそれぞれから受信するように構成される。各受信局に関連した記録ウィンドウは、互いにオフセットするように、かつ/または別々のサイズに構成される。相関器は、宇宙船と複数の受信局の中の少なくとも1つの対の各受信局との距離間の差を推定し、それに基づいて宇宙船位置を推定するために、記録された信号の相関をとるように構成される。
【0066】
本発明は、受信局または処理局で実行されたとき、本発明の前述の方法の受信局に特有のプロシージャまたは処理局に特有のプロシージャをそれぞれ実行するように構成されたコンピュータプログラムにも関する。
【0067】
次に、本発明の実施形態を添付図と共に説明する。
【図面の簡単な説明】
【0068】
【図1】本発明の一実施形態によるシステムを示す概略図であり、図の下部に、ウィンドウのオフセットおよび個々のウィンドウのサイズ設定を示す。
【図2】本発明の一実施形態による方法を示す概略図である。
【図3a】本発明の一実施形態による方法を示す概略図である。
【図3b】本発明の一実施形態による方法を示す概略図である。
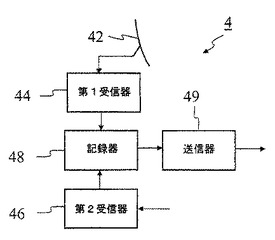
【図4】本発明の一実施形態による受信局を示す概略図である。
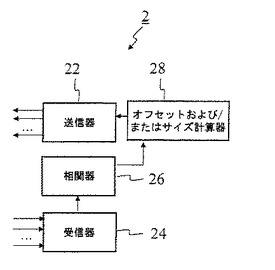
【図5】本発明の一実施形態による処理局を示す概略図である。
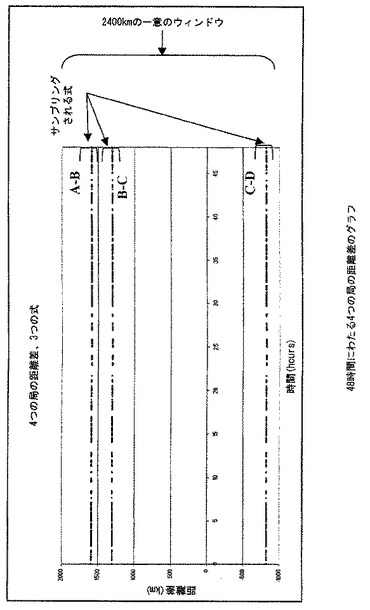
【図6】記録ウィンドウサイズに関連した問題の理解を支援するために、3対の受信局A-B、B-C、およびC-Dに関連した48時間にわたる距離の差の一例を示す図である。
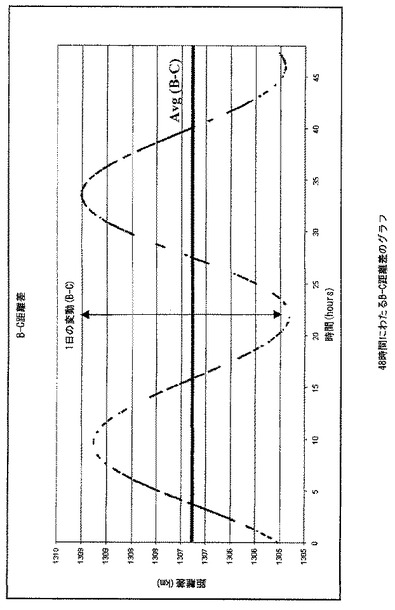
【図7a】受信局BとCとの間の48時間にわたる距離の差の一例を示す図である。
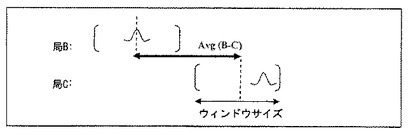
【図7b】2つの受信局BおよびCに関する記録ウィンドウの実施例を示す図である。
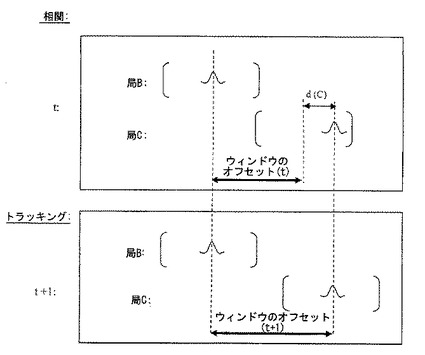
【図8】宇宙船位置追跡システムの状況で、時刻tおよびt+1における2つの受信局BおよびCに関する記録ウィンドウの実施例を示す図である。
【発明を実施するための形態】
【0069】
次に、本発明を特定の実施形態と共に説明する。特定の実施形態は、当業者によりよい理解を提供するのに役立つが、添付の特許請求の範囲によって定義される本発明の範囲を限定するようには決して意図されていないことに留意されたい。具体的には、説明を通じて別々に記述される実施形態は、それらが互いに矛盾しない範囲で、さらなる実施形態を形成するように組み合わせることができる。
【0070】
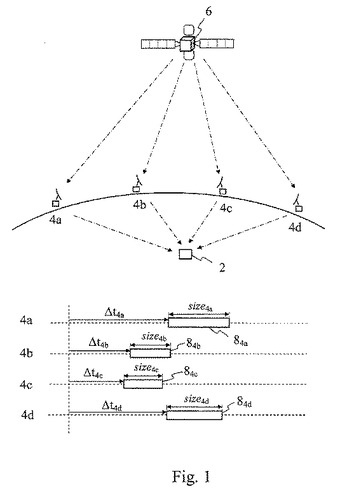
図1は、本発明の一実施形態による、宇宙船6、地球表面上の別個の位置に置かれた受信局4a、4b、4c、4d、および処理局2を概略的に示す。宇宙船6から始まる破線の矢印によって示されるように、宇宙船6は、受信局へ無線周波数信号を発する。宇宙船6から送信された無線周波数信号は、受信局4a、4b、4c、4dで受信される。
【0071】
受信局4a、4b、4c、4dは、特定のそれぞれの記録ウィンドウ84a、84b、84c、84dの期間中に、受信した無線周波数信号シーケンスを記録する。信号シーケンスの性質または内容は、受信局4a、4b、4c、4dによって前もって知られておらず、したがって、受信局で、受信信号シーケンスと所定のシーケンスすなわち既知のパターンとの間の相関はとられない。宇宙船6が、専用の距離信号、デジタルビットのシーケンス、または記録トリガのシーケンスを送信する必要はない。中継されたデジタルまたはアナログのペイロード信号、遠隔測定ビーコンまたは応答管ノイズを含めて、宇宙船6によって放射されるいかなるペイロードまたは通信チャネル信号も推定処理に用いられ得る。
【0072】
受信信号シーケンスは、受信局4a、4b、4c、4dから処理局2へ送信される。信号シーケンスは、送信用にデジタル化されてよい。
【0073】
図1の下部に概略的に示されるように、各受信局4a、4b、4c、4dは、それぞれ記録ウィンドウ84a、84b、84c、84dの期間中に受信信号を記録するように構成される。記録ウィンドウ84a、84b、84c、84dは、共通の瞬間(図1の左下部に垂直の破線で示される)に対して、それぞれオフセットΔt4a、Δt4b、Δt4c、Δt4d(Δはギリシャ文字デルタであり、オフセットを示す)だけオフセットされる。したがって、対の受信局4a、4bの記録ウィンドウ84a、84b間のオフセットは
Δt4b-Δt4a
と等しく、図1の例示的説明ではマイナスの数である。第2の対の受信局4b、4cの記録ウィンドウ84b、84cの両開始間のオフセットは
Δt4c-Δt4b
と等しく、図1の例示的説明ではマイナスの数である。最後に、第3の対の受信局4c、4dの記録ウィンドウ84c、84d間のオフセットは
Δt4d-Δt4c
と等しく、図1の例示的説明ではプラスの数である。
【0074】
記録ウィンドウ84a、84b、84c、84dのサイズは、それぞれsize4a、size4b、size4c、size4dである。これらのサイズは、図示のように、各記録ウィンドウ8に対して個々に設定することができ、したがって互いに異なり得るものである。受信局4に関連した別々のウィンドウサイズを用いると、相関処理用の記録ウィンドウ8の内容における最大のオーバラップが低減する。
【0075】
図1は、ウィンドウのオフセットおよび個々のサイズ設定の両方の使用を示す。これらの2つの技法のうち1つしか使用しないことも可能である。
【0076】
受信局の数は4つに限定されない。宇宙船の位置に関して演繹的な情報が有効な場合、宇宙船位置決めシステムは、1対または2対の受信局だけを含めばよい。同様に、推定精度を向上するために、4つを上回る受信局を形成する3対を上回る受信局を使用することができる。
【0077】
受信局4a、4b、4c、4dで記録された信号シーケンスは処理局2へ送信され、対による相関が実行される。受信局4のそれぞれで記録ウィンドウに対して用いられる次のオフセットも求めることができる。
【0078】
宇宙船6の位置の割出しは、到着の時間差(TDOA、地球上の既知の位置に置かれたそれぞれの受信局における到着の時間差)の計算に基づくものである。これは、2つの双曲面の交点の割出しとして視覚化し、かつ数学的に解くことができる。各双曲面は、前述のように、1対の受信局4に関連した相関ピークを識別することにより得られる。宇宙船位置を推定するための2つの双曲面の交点の割出しは、非線形方程式のシステムを解くことにより遂行され得る。非線形方程式のシステムの解を見いだすことができない場合、最小2乗法などの点から見て最適または最近の解が、宇宙船位置として選択されてよい。
【0079】
衛星位置についての情報は、コンピュータ画面上に与えられ得て(図示せず)、ユーザが、操縦を遂行するべきか、もしくは予測したように操縦が実行されたかということを判断するのを支援し、あるいは宇宙船の軌道を計算するのを支援する。衛星位置についての情報は、可視化または数学的表現を含む任意の形式であり得る。さらに、衛星位置および/または宇宙船と複数の受信局との距離間の差についての情報が、本発明のシステムに組み込まれた処理または本発明のシステムから切り離された処理に対する入力として情報を用いる任意の他のシステムに任意の形式で供給され得る。
【0080】
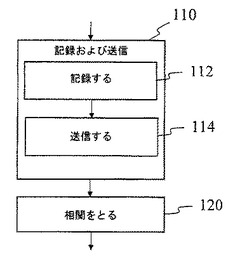
図2は、本発明の一実施形態による方法を示す。この方法は、宇宙船6から送信された信号を受信局4のそれぞれによって記録ウィンドウ8の期間中に記録するステップ112と、記録ウィンドウ8の期間中に記録された記録信号を表すデータを、受信局4のそれぞれによって処理局2へ送信するステップ114とを含む記録および送信のプロシージャ110を含む。上記で説明されたように、各受信局4に関連した記録ウィンドウ8は、互いにオフセットされ、かつ/または別々のサイズである。
【0081】
この方法は、宇宙船6と1対の受信局4のそれぞれの受信局4との距離間の差を推定し(対の受信局が他にある場合には、それらに対して同様に同距離間の差を推定し)、それに基づいて宇宙船位置を推定するために、処理局2によって、記録された信号の相関をとるステップを含む相関プロシージャ120も含む。この相関は、相関ピークを識別するために対によって遂行される。時間における相関ピークの位置は、意図的に定義されたオフセットを相応に考慮に入れると、宇宙船6と対の受信局4のそれぞれの1つとの間の到着時間差に相当し、したがって宇宙船6と対の受信局4のそれぞれの1つとの距離間の差に対応する。
【0082】
この方法は、位置推定処理に対する入力として知られるべき、受信局4と宇宙船6との間の実際の距離を必要としない。この方法は、位置推定処理に対する入力として知られるべき、宇宙船6からの信号の送出時間に関する何らかの情報および宇宙船6から送信された信号の性質に関する何らかの情報のどちらも必要としない。
【0083】
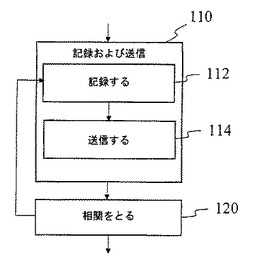
図3aは、本発明の一実施形態による方法を示す。この方法は、相関プロシージャ120の結果、宇宙船位置に関する情報および/また宇宙船と複数の受信局との距離間の差についての情報が得られるばかりでなく、新規のオフセット命令および/またはウィンドウサイズ命令が計算されて処理局2から受信局4へ送信されるという点で図2の方法と異なる。したがって、2つの受信局4に関連した記録ウィンドウ間のオフセットおよび/または記録ウィンドウのウィンドウサイズは、宇宙船6の位置(および2つの受信局4の既知の位置)に関する情報に基づいて計算される。
【0084】
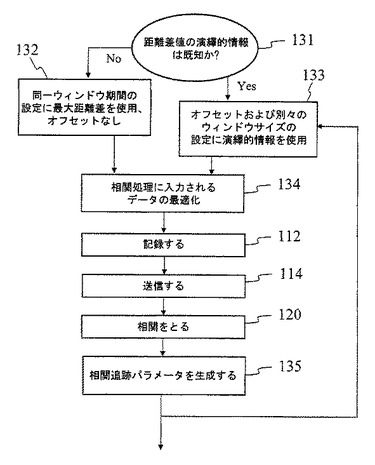
次に、別の実施形態による方法の状況で、記録ウィンドウ8の時間オフセットおよびそれらのサイズ設定を、図3bを参照しながら位置追跡を含めて説明する。オフセットおよびサイズのパラメータは反復して適合される。図3bはフィードバックループを示し、オフセット設定、サイズ設定(すなわち個々のウィンドウのサイズ設定)および追跡の革新的ステップを示す。
【0085】
次に、2つの受信局4a、4bおよびそれらの対応する記録ウィンドウ84a、84bを考える。記録ウィンドウ84a、84bのサイズは、どちらも、受信局4a、4bのうちのそれぞれに関連した最大距離差にオーバヘッドを加えたものを対象として含むように十分大きく設定されてよい(前記距離は、本明細書では「最大距離差(Max range diff)A-B」と称される)。最大距離差A-Bの差は、受信局4aと4bとの間の地上基線距離と等しい。より多くの受信局4a、4b、4c、4dが使用される場合、ウィンドウサイズは、例えば最大距離差C-Dである最大の距離差を考慮に入れる必要がある。ステップ131で距離差値についての演繹的な情報が既知でない場合(「No」の分岐)、設定するステップ132で、記録ウィンドウ84a、84b、84c、84dのサイズの初期値として同じ最大距離差C-Dが用いられてよいが、追跡処理を通じて用いることはできない。
【0086】
距離差値についての演繹的な情報は、
- 衛星軌道予測(ケプラーの要素(Keplerian elements))と、
- 静止弧上に置かれた人工衛星の経度の情報と、
- 静止弧上の人工衛星の近似位置(ボックス内)の情報と、
- 何らかの(過去の)測定から導出された情報(例えばアンテナ位置決め)と、
- 過去の相関から導出した情報(現行の反復の状況において演繹的情報になる)とのうち任意の1つから、あるいはこれらの任意の組合せから導出することができる。
ステップ131で距離差値の演繹的情報が既知である場合(「Yes」の分岐)、これを、ステップ133で、記録ウィンドウ8のサイズおよび記録ウィンドウ8間の時間オフセットの設定に使用することができる。有効な演繹的情報がない場合、オフセットは設定されない。
【0087】
次いで、相関処理に入力されるデータを最適化するステップ134を行なうことができる。これは、
a) 受信局4aに関連したウィンドウサイズを、十分な相関ピーク(有効な信号帯域幅にサンプリング時間を掛けたもの、すなわち「BW×tの積」)を得るのに必要とされる最小限にスケーリングするステップと、
b) ステップ133で得られた距離差の予測精度と一致するように受信局4bに関連したウィンドウサイズを選択するステップとを含むことができる。
【0088】
次いで、記録するステップ112、送信するステップ114、ならびに記録ウィンドウ84aおよび84bの期間中に記録された信号シーケンスの相関をとるステップ120が行なわれる。相関をとるステップ120は、相関ピーク位置の検出を含む。距離差は、ステップ133で設定された相関ピーク位置とウィンドウオフセット(存在する場合)との和である。
【0089】
次いで、パラメータを追跡する相関を生成するステップ135を行なうことができる。一旦ピーク位置が見いだされると、記録ウィンドウ84aとの相関をとるのに適切な内容を持たないオーバヘッドを除去するように記録ウィンドウ84bのサイズを縮小することができる。記録ウィンドウ84bのサイズは、記録ウィンドウ84aのサイズまで縮小することができる。しかし、やがてやって来る記録の反復まで長時間にわたって宇宙船または人工衛星の運動を補償するために、記録ウィンドウ84bのサイズにいくらかのマージンを維持することが好まれる。ステップ120で計算された距離差が、更新された「ウィンドウオフセット」のパラメータ値をもたらす。ステップ135で計算されたサイズが、更新された「ウィンドウサイズ」のパラメータ値をもたらす。次いで、これら新規の値は、次の反復で、データの同一の組に対して、もしくは時間的に遅れて記録されたデータの第2の組に対して用いることができる(「追跡」)。次の反復で生成されたパラメータ値の使用が、図3bの下部から生じてボックス135の後にボックス133に通じる矢印によって示されている。
【0090】
追跡は、1つ前の測定、またはいくつかの反復に対応するいくつかの以前の測定を利用することができる。
【0091】
図4は、本発明の一実施形態による受信局4を示す。受信局4は、宇宙船6の位置の推定に関与する。受信局4は、位置を推定するために処理局2と協働する。受信局4は、アンテナ42またはアンテナユニット42、第1の受信器44または第1の受信ユニット44、記録器48または記録ユニット48、送信器49または送信ユニット49、および第2の受信器46または第2の受信ユニット46を含む。
【0092】
アンテナ42は、位置を推定するべき宇宙船6から信号を受信するように構成される。アンテナ42は、宇宙船6からアンテナ42を介して送信される信号を受信するように構成された第1の受信器44に接続される。第2の受信器46は、処理局2から記録ウィンドウ8の開始命令としてのトリガ時間の指示(時間オフセットに相当する)および/または記録ウィンドウ8のサイズの命令としてウィンドウサイズの指示(期間に相当する)を受信するように構成される。記録器48は、宇宙船6から送信して処理局2から受信された信号のトリガ時間の指示および/またはウィンドウサイズの指示に従って開始された記録ウィンドウ8の期間中、記録をとるように構成される。記録器48は、記録ウィンドウ8の期間中信号を記録するように、処理局2から受信したトリガ時間指示に従って、トリガ時間指示によって指示された時間にアナログデジタル変換器を作動させるように適合されてよい。アナログデジタル変換器のトリガリングは、供給された同期性時刻基準(受信局4間で同期する)に基づいて遂行することができる。
【0093】
送信器49は、記録ウィンドウ8の期間中に記録された信号を表すデータを処理局2へ送信するように構成される。
【0094】
図5は、本発明の一実施形態による処理局2を示す。処理局2は、宇宙船6の位置推定に関与する。処理局2は、位置を推定するために受信局4と協働する。処理局2は、送信器22または送信ユニット22、受信器24または受信ユニット24、相関器26または相関ユニット26を備える。送信器22は、記録ウィンドウ8の開始を指すトリガ時間の指示および/または記録ウィンドウ8のサイズの命令としてのウィンドウサイズ指示を、宇宙船6から送信される信号を受信するように構成された複数の受信局4のそれぞれへ送信するように構成される。換言すれば、トリガ時間指示は、受信局4に対する宇宙船6から受信した信号の記録開始命令である。ウィンドウサイズ指示は、受信局4に対する、ウィンドウサイズの期間中に宇宙船6から受信した信号の記録命令である。記録ウィンドウ8のサイズは、受信局4内で(例えばそのメモリユニットの内部で)設定されたデフォルト値でよく、もしくは処理局2によって受信局4に対する命令として送信されてよい。記録ウィンドウのサイズは、宇宙船6の位置についての演繹的情報を考慮に入れるようにも適合され得る。
【0095】
受信器24は、宇宙船6から送信して記録ウィンドウ8の期間中に記録された信号を表すデータを、複数の受信局4のそれぞれから受信するように構成される。各受信局4に関連した記録ウィンドウ8は、互いにオフセットするように、かつ/または別々のサイズに構成される。相関器26は、宇宙船6の位置を推定するために、記録された信号の相関をとるように構成される。宇宙船位置の推定は、前述の3次元双曲線の位置決め方法に従って相関器26によって遂行される。
【0096】
宇宙船位置および/または相関器26から得られた情報を用いて計算された宇宙船と複数の受信局との距離間の差に基づいて、受信局4のそれぞれの記録ウィンドウ8に関連したオフセットおよび/またはウィンドウサイズを計算するように、オフセットおよび/またはサイズの計算器28またはオフセットおよび/またはサイズの計算ユニット28が設けられる。
【0097】
本発明の実施形態によってもたらされるさらなる利点には、以下のことが含まれる。
- 往復遅延を測定する必要がなく、専用の距離信号のアップリンク機構も不要である。
- タイミング、負荷、待時間、アクセスなどに関するアップリンク(受信局から宇宙船6へのリンク)条件の知識が不要である。
- 人工衛星の送信ユニットによって送信信号の時間スタンプを要求されることがない。
- 受信局では復号も復調も必要とされず、したがって、記録されたシーケンスをタイミング情報と関連付け、かつ記録された信号を処理局2へ送信する前に受信局4によって導入される遅延が低減する(とはいえ、ダウンコンバージョンおよびアナログデジタル(A/D)変換は実行され得る)。
【0098】
次に図6に移って、記録ウィンドウ8のサイズに関連した問題をさらに説明する。図6は、実システムにおける距離差値およびドリフトを示す(実例が図示されており、これはデータの不連続な特性について説明するものである)。このシステムは、静止衛星によって一斉送信された共通信号を記録してタイムスタンプを押す4つの受信局4(本明細書ではA、B、C、およびDで示す)を含む。
【0099】
相関処理は記録ウィンドウを用い、受信局4は、記録ウィンドウの期間を通じて入力信号をサンプリングする。すべての受信局に対して1つの共通の記録ウィンドウを用いることができ、したがって共通の記録開始時間および共通の記録サイズ(期間)を定義することが可能である。しかし、人工衛星ベースのシステムに対して1つの共通の記録ウィンドウを用いると、人工衛星〜地上局の信号伝播時間(往復距離が約77000キロメートルであり、往復遅延が約258ミリ秒である)による実装制約が生じる。実装制約には、記録時間を通じてドップラー効果によってもたらされる様々な周波数ずれ(歪みの原因となり、相関をとる前に軽減する必要がある)および中央処理局へ送信する大量のサンプルデータが含まれる。したがって、1つの共通の記録ウィンドウを用いると順調に行かない。
【0100】
本発明によって提案された問題および解決策の両方を説明するために、実際に収集されたデータに基づく数値的な例がここで示され、
- 人工衛星は、静止弧上で東経19.2度(19.2E)に位置し、
- 4つの受信局が、ヨーロッパで、汎ヨーロッパ衛星ビームの下の3000キロメートルの基線(ルクセンブルク、ストックホルム、ローマおよびマドリッド)に配置され、また、
- 観測時間は48時間であった。
【0101】
この例では、すべての受信局に対する1つの共通の記録ウィンドウは、約2400キロメートルに10パーセントの安全マージンを加えることになり、9ミリ秒の長さの記録ウィンドウが必要となる。すべての受信局に対してオフセットされたウィンドウを用いると、すべての局についてこの必要な記録時間を短縮することができ、したがって外部の影響を低減することができる。
【0102】
オフセットされたウィンドウおよび記録ウィンドウの位置およびサイズを、図7aおよび図7bを参照しながらさらに説明する。図7aは、受信局BとCとの間の48時間にわたる距離差のグラフを示す(この例は大きな日変化を伴う場合である)。平均距離差「Avg(B-C)」の推定が、受信局BおよびCの記録ウィンドウ間のオフセットを決定する。衛星の運動(および距離差の式B-C)における毎日のパターンを識別することができるので、平均位置をめぐる式の日変化を対象として含むように記録ウィンドウのサイズを求めなければならない。
【0103】
図7bは、受信局BおよびC向けの記録ウィンドウ、Avg(B-C)に対応するオフセットおよびウィンドウサイズを示す。ウィンドウサイズは次式から導出される。
ウィンドウサイズ=max(日変化, 位置推定マージン)+記録マージン
【0104】
この例に関する日変化は、3.9キロメートルに等しい。位置推定マージンは、人工衛星が日変化の予測から出る可能性(例えば操縦、静止軌道以外の軌道)を対象として含まなければならない。この例では、2つの特定の受信局(BおよびC)に関して、静止弧上で200キロメートル立方のボックス内を動く人工衛星は、受信局BおよびCとの間で20キロメートルの最大距離差をもたらすことが幾何学的に示され得る。人工衛星から送信された信号の共通部分の間の十分な信号オーバラップを両ウィンドウに対して保証するために、さらなる安全の記録マージンを設定する必要がある。間違った相関ピークを退けるための最小限のサンプル数は、25MHzの帯域幅の信号については200サンプル(50MHzのサンプリング周波数で4ミリ秒)と推定される。したがって、ウィンドウサイズは次式となる。
【0105】
【数1】
【0106】
追跡が、図8を参照しながらさらに説明される。本発明の一実施形態による方法は、衛星位置の変化および1対の受信局(例えば受信局BおよびC)に関する距離差の変化の追跡処理を含む。記録ウィンドウBとCとの相関のそれぞれの反復に関して、相関処理は、特定の「時間シフト」においてピークを出力し、これは主として衛星位置を計算するのに用いられる。これらの「時間シフト」は、間接的には追跡システムに対する入力であり、追跡システムは、次の位置の予測を求め、したがって受信局Bに関連した記録ウィンドウと受信局Cに関連した記録ウィンドウとの間のオフセットの次の予測を求める。
【0107】
各反復におけるウィンドウのオフセットの更新は、記録ウィンドウ間のオーバラップする信号の量を最大化する。したがって、記録ウィンドウのサイズを縮小することができる。図8の諸図面は、説明のために、1次の外挿法による最も簡単な予測を示す。
【0108】
最後に、いかなる図面も直接的に参照することなく、追跡の利点が、特にリアルタイムシステムに対する記録ウィンドウサイズの縮小を含めて、以下でさらに説明され得る。過去の測定に基づく遅延差の優れた短期予知の有効性は、記録ウィンドウのサイズが、もはや日々のパターンを対象として含む必要はなく、したがって縮小され得るという利点を有する。この縮小は、ネットワーク上で中央処理局へ送信されるデータ量を最適化し、リアルタイムシステムの必要性を満たす。
【0109】
縮小された記録ウィンドウは、秒毎のベースで距離差の式の変化を追跡することができなければならない。したがって、信号の曖昧さおよび間違った相関を回避するのに必要なサンプルの最小限の数(次式の記号「#」によって表される)(すなわち、25Mhzの帯域幅の信号に対して50Mhzのサンプリング周波数で200サンプルまたは4ミリ秒)に加えて、記録ウィンドウのサイズは、新規の位置の推定の中に許容誤差を含む必要がある。
記録ウィンドウサイズ=曖昧さを回避するためのサンプル#(200)+推定誤差マージン
【0110】
新規の位置推定誤差とそれを対象として含むのに必要な追加のサンプル数との間の等価性は、50MHzの記録周波数fsおよび1メートルの最悪の場合の推定誤差を想定して次式で計算される。
【0111】
【数2】
【0112】
本発明による追跡システムは、以下でTable 1(表1)に示されるように、一意(unique)のウィンドウベースのシステムと比較して、2000の係数で外部の影響およびデータ転送率を低減することができる。
【0113】
【表1】
【0114】
(注記)「ウィンドウサイズ」、「データ転送率」および「システムのデータ転送率」は、8ビットのA/Dおよび50MHzのサンプリング周波数を想定することにより、それぞれの他のものから導出することができる。
【0115】
* 受信局(例えばB)毎の同一の記録ウィンドウを、すべての式(例えばA-B、B-C)に適用することができる。
【0116】
これに添えて用語「ユニット」(例えば、アンテナユニット42、第1の受信ユニット44、記録ユニット48、送信ユニット49、第2の受信ユニット46、送信ユニット22、受信ユニット24、相関ユニット26、オフセットおよび/またはサイズの計算ユニット28)が用いられる場合、ユニットの構成要素をどのように配置するかということには制限がない。すなわち、ユニットの構成要素は、意図した機能をもたらすための別々のソフトウェアもしくはハードウェアのコンポーネントまたはデバイスの中に配置されてよい。さらに、ユニットのうちいくつかは、それらの機能を遂行するために、単一ユニットを組み合わせることにより集約されてよい。
【0117】
前述のユニットは、ハードウェア、ソフトウェア、ハードウェアとソフトウェアとの組合せ、あらかじめプログラムされたASIC(特定用途向け集積回路)などを用いて実施することができる。ユニットは、コンピュータ処理ユニット(CPU)、記憶ユニット、入出力(I/0)ユニット、ネットワーク接続ユニットなどを含むことができる。
【0118】
本発明が詳細な実施例に基づいて説明されてきたが、詳細な実施例は、当業者に対してよりよい理解をもたらすのみであって本発明の範囲を制限するようには意図されていない。本発明の範囲は、むしろ添付の特許請求の範囲によって定義される。
【符号の説明】
【0119】
2 処理局
4、4a、4b、4c、4d 受信局
6 宇宙船
8、84a、84b、84c、84d 記録ウィンドウ
size4a 記録ウィンドウ84aのサイズ
size4b 記録ウィンドウ84bのサイズ
size4c 記録ウィンドウ84cのサイズ
size4d 記録ウィンドウ84dのサイズ
Δt4a、Δt4b、Δt4c、Δt4d オフセット
22 送信器
24 受信器
26 相関器
28 オフセットおよび/またはサイズの計算ユニット
42 アンテナ
44 第1の受信器
46 第2の受信器
48 記録器
49 送信器
110 記録および送信のプロシージャ
112 記録するステップ
114 送信するステップ
120 相関をとるステップ
131 距離差値の演繹的情報の有無を判定するステップ
132 同一のウィンドウサイズを設定し、オフセットは設定しないステップ
133 ウィンドウのオフセットおよび別々のサイズを設定するステップ
134 データを最適化するステップ
135 相関追跡パラメータを生成するステップ
【技術分野】
【0001】
本発明は、宇宙船の位置、特に地球を周回する人工衛星の位置を推定するためのシステムに関する。本発明は、宇宙船位置を推定する方法、宇宙船位置の推定に関与するための受信局および処理局、ならびに宇宙船位置の推定に関与するための受信局または処理局上で実行されるコンピュータプログラムにも関する。本発明は、宇宙船位置の追跡にも関する。
【背景技術】
【0002】
人工衛星の任意の時点における軌道の割出しおよび情報は、人工衛星の操作員にとって高度に重要なことである。軌道は、測定によって求められた位置推定から導出され得る。例えば、静止衛星は、地球を回る地球静止軌道にある弧上の決められた経度の位置にほぼ計画通りに位置付けられる(すなわち計画または構想に従って位置付けられる)。
【0003】
さらに、衛星位置推定システムによって、操縦の正確な評価が可能になる。操縦の評価は、人工衛星に搭載された限りある量の燃料を経済的に(すなわち控え目に)使う目的に留意した立案および実施された操縦の、軌道に対する効果の監視を含む。静止衛星を決められた経度上に保つのに操縦がことさら必要である。このことによって、人工衛星の非等方性アンテナによる信頼性の高い電気通信の受信および送信が可能になる。地球静止軌道が、ことさら月および太陽の重力によって不安定であるので、そのような操縦が必要である。例えば人工衛星のドリフトと称されるその経度の位置ならびにその傾斜角または離心率を修正するために、人工衛星の軌道を制御されたやり方で変化させるのに操縦が実行される。
【0004】
複数の人工衛星を1つの軌道経度上の共同の位置に置いて運用する場合には、様々な人工衛星間で経度、傾斜角および離心率の小さな分離の組合せが存在する。このシナリオは複雑であり、各人工衛星に関して連続的かつ疑似的なリアルタイムの位置推定および軌道の割出しを必要とする。
【0005】
正確な位置推定は、静止衛星に加えて、いかなるタイプの人工衛星または宇宙船にとっても、それらの使途のタイプまたは軌道にかかわらず、不可欠かつ適用可能なものである。
【0006】
衛星位置は、往復遅延を測定することによって求めることができる。往復遅延の測定は、地上送信局から人工衛星へ信号を送信して人工衛星から地上受信局へ戻し、地上送信局からの信号の送信と地上受信局でのその受信との間の経過時間を測定することを意味する。以下の方法のどれもが、各地上局の位置は正確に知られているものと想定する。
【0007】
既知の、いわゆる三辺測量法は、それぞれが基準信号を送受信することができる3つの地上局を含む。一般に、各局は、単独での人工衛星への基準信号の送信と、人工衛星による中継後の人工衛星からの戻り信号の受信との間の遅延を独立して測定する。並行してこの動作を遂行する3つの局の組が、3つの局から人工衛星への3つの絶対距離測定をもたらし、その結果、人工衛星の位置が計算可能になる。
【0008】
あるいは、三辺測量法は、疑似測位法(pseudo-ranging method)に変換することができる。この方法では、往復遅延は、別々に測定されるのではなく、1つの地上局だけが単一の基準信号を伝送して地上局間で連帯して測定される。この第1の地上局は、人工衛星から戻る信号を受信する。他の局も、第1の地上局によって人工衛星へ送信された単一の基準信号を人工衛星から受信する。したがって、他の地上局と人工衛星との間の距離が間接的に計算される。
【0009】
疑似測位法は地上局間に共通の時刻基準を必要とするが、前述の三辺測量法は必ずしも必要としない。
【0010】
衛星位置の推定は、3つの球体の交差問題(three-sphere intersection problem)を解くこと、またはD. E. Manolakis、「Efficient solution and performance analysis of 3-D position estimation by trilateration」、IEEE trans. on Aerospace & Electronic Systems、Vol. 32、No. 1996年10月4日、1239〜1248頁に説明されているアルゴリズムなどを使うことにより実行することができる。
【0011】
人工衛星などの宇宙船の位置を推定するシステムおよび方法の改善に関する不変の必要性がある。
【0012】
(語句に関する注記)
本発明を要約する前に、本明細書の慣用句「および/または」の用法を説明する。
【0013】
各場合において、慣用句「および/または」は、それによって連結された事項、特徴または文節が、一緒にもしくは個々に引用されることを示すように用いられ、したがって列挙または特定された3つの実施形態をもたらす。換言すれば、「AおよびB」は2つの事項、特徴、または文節であり、表現「Aおよび/またはB」は、「AおよびB」、「A」および「B」の3つの代替案を対象として含む。
【0014】
(例えば請求項、または請求項およびその従属請求項のうちの1つで)表現「Aおよび/またはB」が最初に用いられ、次に表現「前記Aおよび/または前記B」用いられるとき、これは、
- 最初の「AおよびB」ならびに次の「前記Aおよび前記B」と、
- 最初の「AおよびB」ならびに次の「前記A」と、
- 最初の「AおよびB」ならびに次の「前記B」と、
- 最初の「A」および次の「前記A」と、
- 最初の「B」および次の「前記B」との5つの代替案を対象として含む。
【0015】
慣用句「および/または」のさらなる使用はこれらの原則に従って理解されることになり、矛盾した組合せは対象として含まれない。例えば「Aおよび/またはB」に「Cおよび/またはD」が続くとき、各表現が3つの代替案を対象として含み、したがって9つの代替案を対象として含む。しかし、例えば、「C」が「Aの特性」の代用語であり、また「D」が「Bの特性」の代用語であるとき、「Aおよび/またはB」に「Cおよび/またはD」が続くと、5つの代替案しか対象として含まないことが理解されよう。
【先行技術文献】
【特許文献】
【0016】
【特許文献1】米国特許出願公開第2004/0140930号
【非特許文献】
【0017】
【非特許文献1】D. E. Manolakis、「Efficient solution and performance analysis of 3-D position estimation by trilateration」、IEEE trans. on Aerospace & Electronic Systems、Vol. 32、No. 1996年10月4日、1239〜1248頁
【発明の概要】
【発明が解決しようとする課題】
【0018】
本発明は、衛星位置などの宇宙船位置を推定するためのシステムおよび方法を改善することにより、前述の必要性を満たすことを目的とする。
【課題を解決するための手段】
【0019】
本発明によれば、宇宙船位置を推定するためのシステムが提供される。このシステムは、宇宙船から送信された信号を受信するように構成された複数の受信局、および複数の受信局からデータを受信するように構成された処理局を含む。受信局のそれぞれが、宇宙船から送信された信号を、本明細書で記録ウィンドウと称される時間ウィンドウの期間中に記録して、記録ウィンドウの期間中に記録された信号を表すデータを処理局へ送信するように構成される。各受信局に関連した記録ウィンドウは、互いにオフセットするように、かつ/または別々のサイズ(すなわち別々の長さまたは期間)に構成される。処理局は、宇宙船と複数の受信局の中の少なくとも1つの対の各受信局との距離間の差を推定し、それに基づいて宇宙船位置を推定するために、記録された信号の相関をとるように構成される。
【0020】
したがって、第1の代替案では、受信局のそれぞれに関連した記録ウィンドウが、互いにオフセットされるように構成される。第2の代替案では、受信局のそれぞれに関連した記録ウィンドウが、互いに異なるサイズに構成される。第3の代替案では、受信局のそれぞれに関連した記録ウィンドウが、互いにオフセットされ、かつ異なるサイズに構成される。
【0021】
次に、このことをより詳細に説明する。複数の受信局は、宇宙船から送信された無線周波数信号を受信するように構成される。複数の受信局のそれぞれが、記録ウィンドウの期間中、宇宙船から送信された無線周波数信号を記録する。
【0022】
受信局のうちの2つを考える。2つの受信局のそれぞれが、記録ウィンドウまたは記録期間を通じてエアインターフェイスの上の宇宙船から来る無線周波数信号のシーケンスを記録する。記録ウィンドウの開始および終了は、2つの受信局に共通の時刻基準を参照して知られる。次に、2つの受信局で記録された無線周波数信号のシーケンスが、両方とも処理局へ送信される。2つの受信局のそれぞれから送信される無線周波数信号のシーケンスに対応する記録ウィンドウの開始および終了に関する情報は、処理局によって演繹的に知られる、もしくは受信局によって処理局へ送信される。宇宙船から、無線周波数信号のシーケンスがいつ送信されるかということに関する情報は、処理局では必要とされない。同様に、無線周波数信号のシーケンスの性質に関する情報は、処理局では必要とされない。処理局は、既知の共通の時刻基準を参照して、2つのそれぞれの記録ウィンドウの期間中に2つの受信局で受信して記録された無線周波数シーケンスの一部分の到着の時間差(TDOA)を求める。
【0023】
第1の受信局と第2の受信局との無線周波数シーケンスの到着の時間差は、宇宙船と第1の受信局との距離と、宇宙船と第2の受信局との距離との間の差に相当する。この時間差すなわちシフトは、処理局において、2つの無線周波数信号シーケンスの相関をとることにより求められる。相関のピークが、時間差すなわちシフトに相当する。
【0024】
第1および第2の受信局で受信して記録された対の無線周波数シーケンスの相関をとることにより、宇宙船と第1および第2の受信局との距離間の差を、伝播媒体の特性を考慮して求めることができる。対の記録された無線周波数シーケンスに対応する記録ウィンドウの範囲内に、宇宙船から送信されて第1および第2の受信局が受信した元の無線周波数シーケンスの同一の部分がオーバラップする期間がなくてはならない。宇宙船は、宇宙船と第1および第2の受信局との距離間の差が一定である空間における点集合に相当する2つの(two-sheeted)双曲面上に位置付けられる。
【0025】
同一の時点、または実質的に同一の時点で同一の処理を繰り返すことによって、第2の対の受信局、および必要に応じて第3の対の受信局に対して、宇宙船が位置付けられ得る2つの他の双曲面を求めることができる。宇宙船は、これらの双曲面の交点にあると推定することができる。
【0026】
上記で説明されたように、記録された信号は、処理局において対で相関をとられる。双曲面の交点の識別が、宇宙船位置の推定をもたらす。3次元双曲線の位置決めとしても知られているこの処理は、実際に記録された信号シーケンスを処理局へ送信する必要がある。また、有効な相関ピークを得るために、信号シーケンスは十分に長い記録ウィンドウにわたって記録する必要がある。相関処理利得は、サンプリング時間を掛けた有効な信号帯域幅から導出する。
【0027】
この方法は、物理的な層上の、もしくは変調されたペイロードにカプセル化された基準信号パターンを、宇宙船から送信する必要がないという点で有利である。この方法は、受信局での記録を可能にするのに、宇宙船はいかなるトリガシーケンスも発する必要がない。さらに、宇宙船を特別に適合させる必要はない。この意味で、この方法は受動的である。この方法は、協働する宇宙船を必要としない。宇宙船に要求されるのは、受信局によって検出され得る何らかの電磁気信号を送信することだけである。とは言うものの、この方法は、受信局での記録を可能にするように宇宙船によって発せられた基準信号パターンおよびトリガシーケンスに対処し、かつこれらを利用することができる。
【0028】
そのような方法およびシステムを設計するとき、有効な相関をもたらすために、宇宙船と第1および第2の各受信局との距離間の差を考慮に入れた十分な長さを有し、同時に元の送信されたシーケンスに対して十分なオーバラップ時間をさらに含むウィンドウの記録に対応する記録された信号シーケンスを送信する必要性が生じる。そのような必要性を満たす方法またはシステムを実施すると、各受信局と処理局との間の通信リンクに対する負荷がかなり増加する可能性があることが、現在理解されている。
【0029】
これは、例えば操縦を適切かつ適時に制御するために、連続した頻繁な位置推定が必要とされる宇宙船の位置追跡が実行される場合に特に当てはまることがさらに理解されている。処理の角度分解能および宇宙船位置の推定精度を向上させるために、受信局を互いに遠く離して(例えば500キロメートルを上回る距離を隔てて)配置することが好まれる。したがって、各受信局と処理局との間の距離が大きくなり得て、その結果、受信局と処理局との間に見通し線が存在しない。これによって、記録されたシーケンスの送信によってもたらされるネットワーク負荷がさらに増加する。
【0030】
計画的な、かつ制御されたやり方で、記録ウィンドウをオフセットさせることにより、処理局へ送信されるデータ量が低減される。それに加えて、あるいはその代わりに(したがって3つの代替案をもたらしている)、計画的な、かつ制御されたやり方で、各記録ウィンドウのサイズを個々に設定することにより、その結果、記録ウィンドウは互いに異なるサイズを有するように構成され、処理局へ送信されるデータ量も低減される。(共通時刻基準に対して)同一の記録ウィンドウの期間中、各受信局で受信信号シーケンスを記録するのでなく、記録ウィンドウが互いにオフセットされ、かつ/または異なるサイズに設定される。いくつかの実施形態において、記録ウィンドウ間のオフセットおよび/または各ウィンドウの個々のサイズがどのように計算されるかということは、図面(例えば図3b)を参照した特定の実施形態の詳細な説明から明らかになるであろう。
【0031】
米国特許出願公開第2004/0140930号(本明細書では「特許文献1」と称される)に開示されている測位システムも、宇宙船位置の推定に関するものである。本発明をよりよく理解するために、特許文献1と本発明のシステムおよび方法との間の差異を強調するのは興味深いことである。特許文献1のシステムでは、宇宙船と少なくとも3つの受信局のそれぞれとの間の距離が、受信局で求められる。求められた距離値が中央処理局へ送信され、それに基づいて宇宙船位置が推定される。推定は、距離値に対する三辺測量計算に基づくものである。
【0032】
特許文献1の一実施形態では、その図6に示されるように、送信局(図6の数字605)および受信局(図6の数字613)は、1つの距離測量をもたらす往復遅延(発信時刻と受信時刻との間の差)をもたらすように連帯で用いられる。
【0033】
本発明では、2つの受信局で実際に記録された信号が対で処理局へ送信され、そこで相関をとられる点で、本発明は特許文献1と著しく異なる。また、本発明は、記録信号の送信によってもたらされるネットワーク上の負荷を低減するために、各受信局で、記録ウィンドウ間の制御された時間オフセットおよび/または記録ウィンドウの個々のサイズ設定を用いる。特許文献1では、記録ウィンドウをオフセットさせるステップおよび/またはサイズを設定するステップは、どちらも開示されておらず、必要とさえされていない。測位システムによってもたらされるネットワーク上の負荷を低減する問題は特許文献1では生じない、というのは、実際に受信して記録された信号が、受信局で記録された信号コピーの時間差を計算するためにネットワーク上で中央処理局へ送信されるわけではないからである。距離値および時間スタンプ(例えば特許文献1の図6における発信時刻および受信時刻の1つ)だけが送信される。
【0034】
本発明の前述の実施形態では、記録ウィンドウは、互いに時間でオフセットされ、かつ/またはサイズが異なるように構成される。これは、2つの記録ウィンドウ間の値「0」に近い臨時の時間オフセット(例えば2つの記録ウィンドウの開始の間のオフセット)を除外しないことを当業者なら理解するであろう。同様に、これは、2つの記録ウィンドウ間の臨時のほぼ等しいサイズを除外しない。本発明の態様は、記録ウィンドウが時間でオフセットされる、かつ/または互いにサイズが異なるように構成されることにあり、処理局へ送信されるデータ量を低減するために、構成の観点から、意図的に、かつ制御されたやり方で、記録ウィンドウをオフセットさせる、かつ/またはそのサイズを個々に変化させるように位置決めシステムの容量を反映する。計画的で制御されたオフセットおよび/またはサイズ設定は、第1の受信局と宇宙船との間および第2の受信局と宇宙船との距離間の差の演繹的な情報に基づくものである。
【0035】
1対の受信局に関連したオフセットは、共通の時刻基準に対するオフセットである。一実施形態では、受信局には、互いに同期したクロックが備わっている。
【0036】
一実施形態では、いくつかの受信局は、互いに対して時間的に同期しない。受信局のうちいくつかはコンポーネントおよび構成も異なってもよく、したがって各局の個々の固有の遅延によって、互いに対する時間オフセットがもたらされる。受信局の間の非同期の量は処理局によって知られており、その結果、処理局は有意義な(時刻基準の観点から有意義な)オフセット命令を送信することができる。換言すれば、時刻同期がなく、かつ/または受信局間でコンポーネントおよび構成に差異があったとしても、処理局が時刻非同期または受信局間のコンポーネントおよび構成の差異の範囲を知っている限り、処理局は、この非同期ならびにコンポーネントおよび構成の差異を考慮に入れることができ、有意義な相関のために、受信局に対するウィンドウのオフセットおよび/またはサイズの命令を適切に生成して(もしくは命令を起動して)、結果(記録されたデータ)を適切に処理する。
【0037】
本発明によって解決される問題は、宇宙船位置の割出しにとって重要であり、航空交通管制の状況などにおける飛行機位置の割出しに直接適用されることはない(または少なくとも適用するのが非常に困難である)。航空交通管制では、受信局は数キロメートル(50キロメートルを超える距離)離れて配置されるだけであり、受信局と中央処理局との間に見通し線が得られることも多い。さらに、飛行機の瞬時位置は、受信局の受信半径によって対象として含まれる地理的区域のどこかにあり得る。また、飛行機の径路は、高度または方向において非常に動的であって予測不能なことがある。記録ウィンドウをオフセットさせ、かつそのサイズを変化させることが、宇宙船、特に静止衛星に固有の問題を解決する。このことは、受信局の幾何学的配置(互いに、好ましくは500キロメートルより遠く離れた配置)ならびに人工衛星が地球表面の36000キロメートル上の静止軌道または疑似静止軌道にあるという事実と結び付けて考えられる(かなり適切に人工衛星の位置を予測することができる)。受信局と人工衛星との間にかなりの距離があるために、衛星信号の到着時間は、優れた相関ピークを得るのに必要な正味の時間的ウィンドウサイズよりはるかに大きい。記録ウィンドウをオフセットさせ、かつ/またはそのサイズを変化させると、ウィンドウサイズのオーバヘッドが最適化され、中央処理局へ大きなデータ量を伝達する問題が対処される。
【0038】
特定の実施形態では、宇宙船は特定の「ボックス」内にあるように制限される。ボックスは、疑似静止軌道の弧でよく、したがって宇宙船があり得る位置を制限し、これを、別々の受信局向けに受信局と宇宙船との距離間の差ならびにウィンドウサイズおよび時間オフセットへと直接変換する。
【0039】
一実施形態では、受信局のうちの1つが処理局と共に配置される。
【0040】
一実施形態では、受信局から処理局に送信されたデータが、送信のためにデジタル化される。これによってシステムの信頼性が向上する。
【0041】
一実施形態では、処理局による相関は、記録された信号対の相関をとるステップと、2つのコピー間の時間シフトを表す相関ピーク位置を検出するステップと、各対に対応する3次元双曲線または2つの双曲面を計算するステップと、宇宙船位置である同双曲面の交点を計算するステップとを含む。2つを上回る双曲面の交点が1つの点をもたらさない場合に対処するために、この計算は、最も近い(最も可能性の高い)交点、したがって宇宙船位置を見いだすために、例えば最小2乗法を含めて最適化を含むことができる。
【0042】
一実施形態では、処理局による相関は、記録された信号対の相関をとるステップと、2つの信号コピー間の時間シフトを表す相関ピーク位置を検出するステップと、人工衛星から位置が既知のそれぞれの受信局への信号のランタイムにおける結果として生じる差を計算するステップとを含む。このデータは、宇宙船位置を計算する個別のシステムに供給される。
【0043】
一実施形態では、複数の受信局のそれぞれのクロックが同期する。
【0044】
一実施形態では、2つの受信局に関連した記録ウィンドウ間のオフセットおよび/または記録ウィンドウのそれぞれのサイズが、宇宙船の位置および2つの受信局の位置に関する情報に基づいて計算されるように構成される。時間オフセットおよび/またはウィンドウサイズは、処理局によって計算されてよい。
【0045】
一実施形態では、2つの受信局に関連したそれぞれのウィンドウサイズおよび/または記録ウィンドウ間の時間オフセットが、それぞれの受信局によって演繹的に知られるように構成され、処理局によって与えられる必要はない。
【0046】
一実施形態では、このシステムは、宇宙船位置を推定するだけでなく、長時間にわたってその位置を追跡する働きをする。この実施形態では、2つの受信局に関連した記録ウィンドウ間のオフセットが、処理局自体よって(1つまたは複数のステップだけ以前の操縦ステップで)推定された宇宙船位置の情報に基づいて、もしくは(同オフセットが、あらかじめ宇宙船位置の情報に基づいて既に計算されている場合)さらに基づいて計算されるように構成される。
【0047】
一実施形態では、長時間にわたる宇宙船位置の追跡は、ウィンドウのオフセットおよび/またはサイズの設定の予測によって表された演繹的な情報を用いることにより、各受信局によって独立して管理され、処理局によって供給される必要はない。
【0048】
追跡ループすなわちフィードバックループは、以下のようにもたらされ得る。あらかじめ得られた宇宙船位置または受信局と宇宙船との距離間の差の情報に基づいて(宇宙船位置は必ずしも必要ではなく、受信局対に関する距離/時間差がフィードバックループに十分であり、その結果、この処理は、分離した1対の受信局に対しても機能する)、また受信局の位置の所定の情報に基づいて、処理局は、ウィンドウのオフセットおよび/またはサイズの設定の命令を受信局へ送信する。
【0049】
用語「距離(range)」は、本明細書では宇宙船(または一実施形態では人工衛星)と受信局との間の隔たりを指す。
【0050】
各受信局が、処理局から受信したウィンドウのオフセットおよび/またはサイズの設定の命令に基づいて、宇宙船から受信した信号シーケンスを記録し、同シーケンスは処理局へ送信される。処理局は、新しく記録された信号シーケンスを受信する。処理局は、宇宙船位置の推定を再計算すなわち更新し、受信局と宇宙船との距離間の差を再計算して、最後に、送信されるべき新規のウィンドウのオフセットおよび/またはウィンドウサイズを計算する。次いで、再び追跡ループが実行される。本システムおよび方法により、通信リンク上で受信局と処理局との間を送信されるべきデータ量を著しく低減することができる。
【0051】
記録ウィンドウのサイズは、宇宙船位置についての演繹的な情報についての精度の度合いにことさら基づいて、処理局によって適合および制御され得る。この実施形態では、処理局は、オフセット命令だけでなくウィンドウサイズの命令も受信局へ送信する。オフセット命令は記録ウィンドウの開始を決定し、サイズ命令はそのサイズを決定する。一実施形態では、記録ウィンドウサイズが適合されるのではなく、例えば人工衛星の1日にわたる、または操縦後の半径方向運動によってもたらされる時間差異、あるいは大気によって導入される遅延の変動を含むシステムの未知のすべてまたは大部分の時間関連パラメータを考慮に入れて、前もって求められる。
【0052】
オフセットおよび任意選択で記録ウィンドウサイズを求めるための、衛星位置の追跡と過去の位置情報を効率的な利用には、密接な相互関係がある。
【0053】
一実施形態では、追跡はリアルタイムで実行される。「リアルタイム」は、ここでは、迅速で成功する操縦評価を可能にするためのシステム応答に関する運用上のデッドラインを意味する。リアルタイムの追跡および位置制御は、人工衛星に搭載されたエンジンを使用する位置制御および操縦に重要なものであり得る。
【0054】
一実施形態では、毎秒1回の記録動作の割合が受信局で用いられ、追跡のための1つの位置推定がもたらされる。一実施形態では、0.1秒につき1回の記録動作と24時間につき1回の記録動作との間に含まれる割合が、追跡に用いられる。
【0055】
ウィンドウ追跡を用いるとき、相関ピークの位置が検出され、ウィンドウは、次の反復のために、内容におけるそれぞれのオーバラップを最大化し、したがって信号間の時間差を追跡するようにオフセットされる。人工衛星のそのような追跡のための位置予測は可能である、というのは、人工衛星が、受信局に対して比較的ゆっくりした一定の運動を一般に長時間にわたって受けるからである。
【0056】
追跡が用いられる一実施形態では、オフセットは、第1の記録動作から導出した推定された宇宙船位置に基づいて第1の記録動作と第2の記録動作との間に計算されるように構成される。第1および第2の記録動作は、例えば0.1秒から12時間だけ分離され得る。第1および第2の記録動作は、2つの連続した記録動作でよい。
【0057】
一実施形態では、受信局の少なくとも1つは宇宙船の主ローブダウンリンクのフットプリントの外部に配置される。この設定は、地球上の限定された領域に向けて通信する狭い放射ビームパターンを用いる非等方性すなわち指向性のアンテナを使用した宇宙船の位置を推定するのに特に好都合に適合し、同時に、受信局を互いに十分遠く離すことが可能になり、宇宙船位置を求めるのに優れた角度分解能をもたらす。受信局が互いから遠ければ遠いほど、分解能はより優れたものになる。
【0058】
このことを、以下でさらに説明する。このシステムは、記録された信号の相関をとることに基づくものである。したがって、相関法の固有の処理利得のために、相関利得が記録ウィンドウのサンプリング時間を掛けた信号帯域幅の積によって最初に求められるので、相関処理では低S/N(信号対ノイズ)比またはマイナスのS/N比を有する信号が用いられ得る。したがって、個別信号の低S/N比またはマイナスのS/N比を補償するために相関利得が用いられ、相関は依然として有効なピークをもたらすことができる。
【0059】
一実施形態では、各記録ウィンドウは十分に短い期間を有し、その結果、ドップラー効果、大気の影響(歪みをもたらす恐れがある)および受信局の受信フロントエンドの不完全性が、処理局による相関に深刻な影響を及ぼすことがなく、換言すれば、その結果、ドップラー効果、大気によって誘起される歪みおよび受信局のフロントエンドの不完全性によってもたらされる周波数シフトが、相関処理に深刻な影響を及ぼすことはない。
【0060】
一実施形態では、記録ウィンドウのうち少なくとも1つは、4マイクロ秒と10ミリ秒の間に含まれるサイズを有する。一実施形態では、各記録ウィンドウが、4マイクロ秒と10ミリ秒との間に含まれるサイズを有する。これらの実施形態は、宇宙船の適用に関して、有効な相関ピークを得るために十分に長い記録ウィンドウを有することと、受信局と処理局との間の通信リンク上の負荷を低減するために十分に短い記録ウィンドウを有することとの優れた折衷をもたらす。
【0061】
一実施形態では、非静止衛星の位置が推定される。
【0062】
一実施形態では、受信局から処理局へ送信されるデータは、ウィンドウに関する任意の形式のタイミング情報を含む。
【0063】
本発明は、宇宙船から送信される信号を受信するように構成された複数の受信局、および複数の受信局からデータを受信するように構成された処理局を使用して宇宙船位置を推定する方法にも関する。この方法は、記録および送信のプロシージャおよび相関プロシージャを含む。記録および送信のプロシージャは、宇宙船から送信された信号を記録ウィンドウの期間中に各受信局によって記録するステップと、記録ウィンドウの期間中に記録された信号を表すデータを、各受信局によって処理局へ送信するステップとを含む。各受信局に関連した記録ウィンドウは、互いにオフセットされる、かつ/または別々のサイズ(すなわち長さまたは期間)である。相関プロシージャは、宇宙船と複数の受信局の中の少なくとも1つの対の各受信局との距離間の差を推定し、それに基づいて宇宙船位置を推定するために、処理局で、記録された信号の相関をとるステップを含む。
【0064】
本発明は、宇宙船位置の推定に関与する受信局にも関する。受信局は、第1の受信器、第2の受信器、記録器、および送信器を含む。第1の受信器は、宇宙船から送信された信号を受信するように構成される。第2の受信器は、処理局から、記録ウィンドウの開始命令としてのトリガ時間の指示および/または記録ウィンドウサイズの命令としてウィンドウサイズの指示を受信するように構成される。記録器は、宇宙船から送信して受信された信号のトリガ時間の指示および/またはウィンドウサイズの指示に従って開始される記録ウィンドウの期間中、記録をとるように構成される。送信器は、記録ウィンドウの期間中に記録された信号を表すデータを処理局へ送信するように構成される。
【0065】
本発明は、宇宙船位置の推定に関与する処理局にも関する。処理局は、送信器、受信器および相関器を備える。送信器は、記録ウィンドウの開始を指すトリガ時間の指示および/または記録ウィンドウサイズの命令としてのウィンドウサイズ指示を、宇宙船から送信される信号を受信するように構成された複数の受信局のそれぞれへ送信するように構成される。受信器は、宇宙船から送信されて記録ウィンドウの期間中に記録された信号を表すデータを、複数の受信局のそれぞれから受信するように構成される。各受信局に関連した記録ウィンドウは、互いにオフセットするように、かつ/または別々のサイズに構成される。相関器は、宇宙船と複数の受信局の中の少なくとも1つの対の各受信局との距離間の差を推定し、それに基づいて宇宙船位置を推定するために、記録された信号の相関をとるように構成される。
【0066】
本発明は、受信局または処理局で実行されたとき、本発明の前述の方法の受信局に特有のプロシージャまたは処理局に特有のプロシージャをそれぞれ実行するように構成されたコンピュータプログラムにも関する。
【0067】
次に、本発明の実施形態を添付図と共に説明する。
【図面の簡単な説明】
【0068】
【図1】本発明の一実施形態によるシステムを示す概略図であり、図の下部に、ウィンドウのオフセットおよび個々のウィンドウのサイズ設定を示す。
【図2】本発明の一実施形態による方法を示す概略図である。
【図3a】本発明の一実施形態による方法を示す概略図である。
【図3b】本発明の一実施形態による方法を示す概略図である。
【図4】本発明の一実施形態による受信局を示す概略図である。
【図5】本発明の一実施形態による処理局を示す概略図である。
【図6】記録ウィンドウサイズに関連した問題の理解を支援するために、3対の受信局A-B、B-C、およびC-Dに関連した48時間にわたる距離の差の一例を示す図である。
【図7a】受信局BとCとの間の48時間にわたる距離の差の一例を示す図である。
【図7b】2つの受信局BおよびCに関する記録ウィンドウの実施例を示す図である。
【図8】宇宙船位置追跡システムの状況で、時刻tおよびt+1における2つの受信局BおよびCに関する記録ウィンドウの実施例を示す図である。
【発明を実施するための形態】
【0069】
次に、本発明を特定の実施形態と共に説明する。特定の実施形態は、当業者によりよい理解を提供するのに役立つが、添付の特許請求の範囲によって定義される本発明の範囲を限定するようには決して意図されていないことに留意されたい。具体的には、説明を通じて別々に記述される実施形態は、それらが互いに矛盾しない範囲で、さらなる実施形態を形成するように組み合わせることができる。
【0070】
図1は、本発明の一実施形態による、宇宙船6、地球表面上の別個の位置に置かれた受信局4a、4b、4c、4d、および処理局2を概略的に示す。宇宙船6から始まる破線の矢印によって示されるように、宇宙船6は、受信局へ無線周波数信号を発する。宇宙船6から送信された無線周波数信号は、受信局4a、4b、4c、4dで受信される。
【0071】
受信局4a、4b、4c、4dは、特定のそれぞれの記録ウィンドウ84a、84b、84c、84dの期間中に、受信した無線周波数信号シーケンスを記録する。信号シーケンスの性質または内容は、受信局4a、4b、4c、4dによって前もって知られておらず、したがって、受信局で、受信信号シーケンスと所定のシーケンスすなわち既知のパターンとの間の相関はとられない。宇宙船6が、専用の距離信号、デジタルビットのシーケンス、または記録トリガのシーケンスを送信する必要はない。中継されたデジタルまたはアナログのペイロード信号、遠隔測定ビーコンまたは応答管ノイズを含めて、宇宙船6によって放射されるいかなるペイロードまたは通信チャネル信号も推定処理に用いられ得る。
【0072】
受信信号シーケンスは、受信局4a、4b、4c、4dから処理局2へ送信される。信号シーケンスは、送信用にデジタル化されてよい。
【0073】
図1の下部に概略的に示されるように、各受信局4a、4b、4c、4dは、それぞれ記録ウィンドウ84a、84b、84c、84dの期間中に受信信号を記録するように構成される。記録ウィンドウ84a、84b、84c、84dは、共通の瞬間(図1の左下部に垂直の破線で示される)に対して、それぞれオフセットΔt4a、Δt4b、Δt4c、Δt4d(Δはギリシャ文字デルタであり、オフセットを示す)だけオフセットされる。したがって、対の受信局4a、4bの記録ウィンドウ84a、84b間のオフセットは
Δt4b-Δt4a
と等しく、図1の例示的説明ではマイナスの数である。第2の対の受信局4b、4cの記録ウィンドウ84b、84cの両開始間のオフセットは
Δt4c-Δt4b
と等しく、図1の例示的説明ではマイナスの数である。最後に、第3の対の受信局4c、4dの記録ウィンドウ84c、84d間のオフセットは
Δt4d-Δt4c
と等しく、図1の例示的説明ではプラスの数である。
【0074】
記録ウィンドウ84a、84b、84c、84dのサイズは、それぞれsize4a、size4b、size4c、size4dである。これらのサイズは、図示のように、各記録ウィンドウ8に対して個々に設定することができ、したがって互いに異なり得るものである。受信局4に関連した別々のウィンドウサイズを用いると、相関処理用の記録ウィンドウ8の内容における最大のオーバラップが低減する。
【0075】
図1は、ウィンドウのオフセットおよび個々のサイズ設定の両方の使用を示す。これらの2つの技法のうち1つしか使用しないことも可能である。
【0076】
受信局の数は4つに限定されない。宇宙船の位置に関して演繹的な情報が有効な場合、宇宙船位置決めシステムは、1対または2対の受信局だけを含めばよい。同様に、推定精度を向上するために、4つを上回る受信局を形成する3対を上回る受信局を使用することができる。
【0077】
受信局4a、4b、4c、4dで記録された信号シーケンスは処理局2へ送信され、対による相関が実行される。受信局4のそれぞれで記録ウィンドウに対して用いられる次のオフセットも求めることができる。
【0078】
宇宙船6の位置の割出しは、到着の時間差(TDOA、地球上の既知の位置に置かれたそれぞれの受信局における到着の時間差)の計算に基づくものである。これは、2つの双曲面の交点の割出しとして視覚化し、かつ数学的に解くことができる。各双曲面は、前述のように、1対の受信局4に関連した相関ピークを識別することにより得られる。宇宙船位置を推定するための2つの双曲面の交点の割出しは、非線形方程式のシステムを解くことにより遂行され得る。非線形方程式のシステムの解を見いだすことができない場合、最小2乗法などの点から見て最適または最近の解が、宇宙船位置として選択されてよい。
【0079】
衛星位置についての情報は、コンピュータ画面上に与えられ得て(図示せず)、ユーザが、操縦を遂行するべきか、もしくは予測したように操縦が実行されたかということを判断するのを支援し、あるいは宇宙船の軌道を計算するのを支援する。衛星位置についての情報は、可視化または数学的表現を含む任意の形式であり得る。さらに、衛星位置および/または宇宙船と複数の受信局との距離間の差についての情報が、本発明のシステムに組み込まれた処理または本発明のシステムから切り離された処理に対する入力として情報を用いる任意の他のシステムに任意の形式で供給され得る。
【0080】
図2は、本発明の一実施形態による方法を示す。この方法は、宇宙船6から送信された信号を受信局4のそれぞれによって記録ウィンドウ8の期間中に記録するステップ112と、記録ウィンドウ8の期間中に記録された記録信号を表すデータを、受信局4のそれぞれによって処理局2へ送信するステップ114とを含む記録および送信のプロシージャ110を含む。上記で説明されたように、各受信局4に関連した記録ウィンドウ8は、互いにオフセットされ、かつ/または別々のサイズである。
【0081】
この方法は、宇宙船6と1対の受信局4のそれぞれの受信局4との距離間の差を推定し(対の受信局が他にある場合には、それらに対して同様に同距離間の差を推定し)、それに基づいて宇宙船位置を推定するために、処理局2によって、記録された信号の相関をとるステップを含む相関プロシージャ120も含む。この相関は、相関ピークを識別するために対によって遂行される。時間における相関ピークの位置は、意図的に定義されたオフセットを相応に考慮に入れると、宇宙船6と対の受信局4のそれぞれの1つとの間の到着時間差に相当し、したがって宇宙船6と対の受信局4のそれぞれの1つとの距離間の差に対応する。
【0082】
この方法は、位置推定処理に対する入力として知られるべき、受信局4と宇宙船6との間の実際の距離を必要としない。この方法は、位置推定処理に対する入力として知られるべき、宇宙船6からの信号の送出時間に関する何らかの情報および宇宙船6から送信された信号の性質に関する何らかの情報のどちらも必要としない。
【0083】
図3aは、本発明の一実施形態による方法を示す。この方法は、相関プロシージャ120の結果、宇宙船位置に関する情報および/また宇宙船と複数の受信局との距離間の差についての情報が得られるばかりでなく、新規のオフセット命令および/またはウィンドウサイズ命令が計算されて処理局2から受信局4へ送信されるという点で図2の方法と異なる。したがって、2つの受信局4に関連した記録ウィンドウ間のオフセットおよび/または記録ウィンドウのウィンドウサイズは、宇宙船6の位置(および2つの受信局4の既知の位置)に関する情報に基づいて計算される。
【0084】
次に、別の実施形態による方法の状況で、記録ウィンドウ8の時間オフセットおよびそれらのサイズ設定を、図3bを参照しながら位置追跡を含めて説明する。オフセットおよびサイズのパラメータは反復して適合される。図3bはフィードバックループを示し、オフセット設定、サイズ設定(すなわち個々のウィンドウのサイズ設定)および追跡の革新的ステップを示す。
【0085】
次に、2つの受信局4a、4bおよびそれらの対応する記録ウィンドウ84a、84bを考える。記録ウィンドウ84a、84bのサイズは、どちらも、受信局4a、4bのうちのそれぞれに関連した最大距離差にオーバヘッドを加えたものを対象として含むように十分大きく設定されてよい(前記距離は、本明細書では「最大距離差(Max range diff)A-B」と称される)。最大距離差A-Bの差は、受信局4aと4bとの間の地上基線距離と等しい。より多くの受信局4a、4b、4c、4dが使用される場合、ウィンドウサイズは、例えば最大距離差C-Dである最大の距離差を考慮に入れる必要がある。ステップ131で距離差値についての演繹的な情報が既知でない場合(「No」の分岐)、設定するステップ132で、記録ウィンドウ84a、84b、84c、84dのサイズの初期値として同じ最大距離差C-Dが用いられてよいが、追跡処理を通じて用いることはできない。
【0086】
距離差値についての演繹的な情報は、
- 衛星軌道予測(ケプラーの要素(Keplerian elements))と、
- 静止弧上に置かれた人工衛星の経度の情報と、
- 静止弧上の人工衛星の近似位置(ボックス内)の情報と、
- 何らかの(過去の)測定から導出された情報(例えばアンテナ位置決め)と、
- 過去の相関から導出した情報(現行の反復の状況において演繹的情報になる)とのうち任意の1つから、あるいはこれらの任意の組合せから導出することができる。
ステップ131で距離差値の演繹的情報が既知である場合(「Yes」の分岐)、これを、ステップ133で、記録ウィンドウ8のサイズおよび記録ウィンドウ8間の時間オフセットの設定に使用することができる。有効な演繹的情報がない場合、オフセットは設定されない。
【0087】
次いで、相関処理に入力されるデータを最適化するステップ134を行なうことができる。これは、
a) 受信局4aに関連したウィンドウサイズを、十分な相関ピーク(有効な信号帯域幅にサンプリング時間を掛けたもの、すなわち「BW×tの積」)を得るのに必要とされる最小限にスケーリングするステップと、
b) ステップ133で得られた距離差の予測精度と一致するように受信局4bに関連したウィンドウサイズを選択するステップとを含むことができる。
【0088】
次いで、記録するステップ112、送信するステップ114、ならびに記録ウィンドウ84aおよび84bの期間中に記録された信号シーケンスの相関をとるステップ120が行なわれる。相関をとるステップ120は、相関ピーク位置の検出を含む。距離差は、ステップ133で設定された相関ピーク位置とウィンドウオフセット(存在する場合)との和である。
【0089】
次いで、パラメータを追跡する相関を生成するステップ135を行なうことができる。一旦ピーク位置が見いだされると、記録ウィンドウ84aとの相関をとるのに適切な内容を持たないオーバヘッドを除去するように記録ウィンドウ84bのサイズを縮小することができる。記録ウィンドウ84bのサイズは、記録ウィンドウ84aのサイズまで縮小することができる。しかし、やがてやって来る記録の反復まで長時間にわたって宇宙船または人工衛星の運動を補償するために、記録ウィンドウ84bのサイズにいくらかのマージンを維持することが好まれる。ステップ120で計算された距離差が、更新された「ウィンドウオフセット」のパラメータ値をもたらす。ステップ135で計算されたサイズが、更新された「ウィンドウサイズ」のパラメータ値をもたらす。次いで、これら新規の値は、次の反復で、データの同一の組に対して、もしくは時間的に遅れて記録されたデータの第2の組に対して用いることができる(「追跡」)。次の反復で生成されたパラメータ値の使用が、図3bの下部から生じてボックス135の後にボックス133に通じる矢印によって示されている。
【0090】
追跡は、1つ前の測定、またはいくつかの反復に対応するいくつかの以前の測定を利用することができる。
【0091】
図4は、本発明の一実施形態による受信局4を示す。受信局4は、宇宙船6の位置の推定に関与する。受信局4は、位置を推定するために処理局2と協働する。受信局4は、アンテナ42またはアンテナユニット42、第1の受信器44または第1の受信ユニット44、記録器48または記録ユニット48、送信器49または送信ユニット49、および第2の受信器46または第2の受信ユニット46を含む。
【0092】
アンテナ42は、位置を推定するべき宇宙船6から信号を受信するように構成される。アンテナ42は、宇宙船6からアンテナ42を介して送信される信号を受信するように構成された第1の受信器44に接続される。第2の受信器46は、処理局2から記録ウィンドウ8の開始命令としてのトリガ時間の指示(時間オフセットに相当する)および/または記録ウィンドウ8のサイズの命令としてウィンドウサイズの指示(期間に相当する)を受信するように構成される。記録器48は、宇宙船6から送信して処理局2から受信された信号のトリガ時間の指示および/またはウィンドウサイズの指示に従って開始された記録ウィンドウ8の期間中、記録をとるように構成される。記録器48は、記録ウィンドウ8の期間中信号を記録するように、処理局2から受信したトリガ時間指示に従って、トリガ時間指示によって指示された時間にアナログデジタル変換器を作動させるように適合されてよい。アナログデジタル変換器のトリガリングは、供給された同期性時刻基準(受信局4間で同期する)に基づいて遂行することができる。
【0093】
送信器49は、記録ウィンドウ8の期間中に記録された信号を表すデータを処理局2へ送信するように構成される。
【0094】
図5は、本発明の一実施形態による処理局2を示す。処理局2は、宇宙船6の位置推定に関与する。処理局2は、位置を推定するために受信局4と協働する。処理局2は、送信器22または送信ユニット22、受信器24または受信ユニット24、相関器26または相関ユニット26を備える。送信器22は、記録ウィンドウ8の開始を指すトリガ時間の指示および/または記録ウィンドウ8のサイズの命令としてのウィンドウサイズ指示を、宇宙船6から送信される信号を受信するように構成された複数の受信局4のそれぞれへ送信するように構成される。換言すれば、トリガ時間指示は、受信局4に対する宇宙船6から受信した信号の記録開始命令である。ウィンドウサイズ指示は、受信局4に対する、ウィンドウサイズの期間中に宇宙船6から受信した信号の記録命令である。記録ウィンドウ8のサイズは、受信局4内で(例えばそのメモリユニットの内部で)設定されたデフォルト値でよく、もしくは処理局2によって受信局4に対する命令として送信されてよい。記録ウィンドウのサイズは、宇宙船6の位置についての演繹的情報を考慮に入れるようにも適合され得る。
【0095】
受信器24は、宇宙船6から送信して記録ウィンドウ8の期間中に記録された信号を表すデータを、複数の受信局4のそれぞれから受信するように構成される。各受信局4に関連した記録ウィンドウ8は、互いにオフセットするように、かつ/または別々のサイズに構成される。相関器26は、宇宙船6の位置を推定するために、記録された信号の相関をとるように構成される。宇宙船位置の推定は、前述の3次元双曲線の位置決め方法に従って相関器26によって遂行される。
【0096】
宇宙船位置および/または相関器26から得られた情報を用いて計算された宇宙船と複数の受信局との距離間の差に基づいて、受信局4のそれぞれの記録ウィンドウ8に関連したオフセットおよび/またはウィンドウサイズを計算するように、オフセットおよび/またはサイズの計算器28またはオフセットおよび/またはサイズの計算ユニット28が設けられる。
【0097】
本発明の実施形態によってもたらされるさらなる利点には、以下のことが含まれる。
- 往復遅延を測定する必要がなく、専用の距離信号のアップリンク機構も不要である。
- タイミング、負荷、待時間、アクセスなどに関するアップリンク(受信局から宇宙船6へのリンク)条件の知識が不要である。
- 人工衛星の送信ユニットによって送信信号の時間スタンプを要求されることがない。
- 受信局では復号も復調も必要とされず、したがって、記録されたシーケンスをタイミング情報と関連付け、かつ記録された信号を処理局2へ送信する前に受信局4によって導入される遅延が低減する(とはいえ、ダウンコンバージョンおよびアナログデジタル(A/D)変換は実行され得る)。
【0098】
次に図6に移って、記録ウィンドウ8のサイズに関連した問題をさらに説明する。図6は、実システムにおける距離差値およびドリフトを示す(実例が図示されており、これはデータの不連続な特性について説明するものである)。このシステムは、静止衛星によって一斉送信された共通信号を記録してタイムスタンプを押す4つの受信局4(本明細書ではA、B、C、およびDで示す)を含む。
【0099】
相関処理は記録ウィンドウを用い、受信局4は、記録ウィンドウの期間を通じて入力信号をサンプリングする。すべての受信局に対して1つの共通の記録ウィンドウを用いることができ、したがって共通の記録開始時間および共通の記録サイズ(期間)を定義することが可能である。しかし、人工衛星ベースのシステムに対して1つの共通の記録ウィンドウを用いると、人工衛星〜地上局の信号伝播時間(往復距離が約77000キロメートルであり、往復遅延が約258ミリ秒である)による実装制約が生じる。実装制約には、記録時間を通じてドップラー効果によってもたらされる様々な周波数ずれ(歪みの原因となり、相関をとる前に軽減する必要がある)および中央処理局へ送信する大量のサンプルデータが含まれる。したがって、1つの共通の記録ウィンドウを用いると順調に行かない。
【0100】
本発明によって提案された問題および解決策の両方を説明するために、実際に収集されたデータに基づく数値的な例がここで示され、
- 人工衛星は、静止弧上で東経19.2度(19.2E)に位置し、
- 4つの受信局が、ヨーロッパで、汎ヨーロッパ衛星ビームの下の3000キロメートルの基線(ルクセンブルク、ストックホルム、ローマおよびマドリッド)に配置され、また、
- 観測時間は48時間であった。
【0101】
この例では、すべての受信局に対する1つの共通の記録ウィンドウは、約2400キロメートルに10パーセントの安全マージンを加えることになり、9ミリ秒の長さの記録ウィンドウが必要となる。すべての受信局に対してオフセットされたウィンドウを用いると、すべての局についてこの必要な記録時間を短縮することができ、したがって外部の影響を低減することができる。
【0102】
オフセットされたウィンドウおよび記録ウィンドウの位置およびサイズを、図7aおよび図7bを参照しながらさらに説明する。図7aは、受信局BとCとの間の48時間にわたる距離差のグラフを示す(この例は大きな日変化を伴う場合である)。平均距離差「Avg(B-C)」の推定が、受信局BおよびCの記録ウィンドウ間のオフセットを決定する。衛星の運動(および距離差の式B-C)における毎日のパターンを識別することができるので、平均位置をめぐる式の日変化を対象として含むように記録ウィンドウのサイズを求めなければならない。
【0103】
図7bは、受信局BおよびC向けの記録ウィンドウ、Avg(B-C)に対応するオフセットおよびウィンドウサイズを示す。ウィンドウサイズは次式から導出される。
ウィンドウサイズ=max(日変化, 位置推定マージン)+記録マージン
【0104】
この例に関する日変化は、3.9キロメートルに等しい。位置推定マージンは、人工衛星が日変化の予測から出る可能性(例えば操縦、静止軌道以外の軌道)を対象として含まなければならない。この例では、2つの特定の受信局(BおよびC)に関して、静止弧上で200キロメートル立方のボックス内を動く人工衛星は、受信局BおよびCとの間で20キロメートルの最大距離差をもたらすことが幾何学的に示され得る。人工衛星から送信された信号の共通部分の間の十分な信号オーバラップを両ウィンドウに対して保証するために、さらなる安全の記録マージンを設定する必要がある。間違った相関ピークを退けるための最小限のサンプル数は、25MHzの帯域幅の信号については200サンプル(50MHzのサンプリング周波数で4ミリ秒)と推定される。したがって、ウィンドウサイズは次式となる。
【0105】
【数1】
【0106】
追跡が、図8を参照しながらさらに説明される。本発明の一実施形態による方法は、衛星位置の変化および1対の受信局(例えば受信局BおよびC)に関する距離差の変化の追跡処理を含む。記録ウィンドウBとCとの相関のそれぞれの反復に関して、相関処理は、特定の「時間シフト」においてピークを出力し、これは主として衛星位置を計算するのに用いられる。これらの「時間シフト」は、間接的には追跡システムに対する入力であり、追跡システムは、次の位置の予測を求め、したがって受信局Bに関連した記録ウィンドウと受信局Cに関連した記録ウィンドウとの間のオフセットの次の予測を求める。
【0107】
各反復におけるウィンドウのオフセットの更新は、記録ウィンドウ間のオーバラップする信号の量を最大化する。したがって、記録ウィンドウのサイズを縮小することができる。図8の諸図面は、説明のために、1次の外挿法による最も簡単な予測を示す。
【0108】
最後に、いかなる図面も直接的に参照することなく、追跡の利点が、特にリアルタイムシステムに対する記録ウィンドウサイズの縮小を含めて、以下でさらに説明され得る。過去の測定に基づく遅延差の優れた短期予知の有効性は、記録ウィンドウのサイズが、もはや日々のパターンを対象として含む必要はなく、したがって縮小され得るという利点を有する。この縮小は、ネットワーク上で中央処理局へ送信されるデータ量を最適化し、リアルタイムシステムの必要性を満たす。
【0109】
縮小された記録ウィンドウは、秒毎のベースで距離差の式の変化を追跡することができなければならない。したがって、信号の曖昧さおよび間違った相関を回避するのに必要なサンプルの最小限の数(次式の記号「#」によって表される)(すなわち、25Mhzの帯域幅の信号に対して50Mhzのサンプリング周波数で200サンプルまたは4ミリ秒)に加えて、記録ウィンドウのサイズは、新規の位置の推定の中に許容誤差を含む必要がある。
記録ウィンドウサイズ=曖昧さを回避するためのサンプル#(200)+推定誤差マージン
【0110】
新規の位置推定誤差とそれを対象として含むのに必要な追加のサンプル数との間の等価性は、50MHzの記録周波数fsおよび1メートルの最悪の場合の推定誤差を想定して次式で計算される。
【0111】
【数2】
【0112】
本発明による追跡システムは、以下でTable 1(表1)に示されるように、一意(unique)のウィンドウベースのシステムと比較して、2000の係数で外部の影響およびデータ転送率を低減することができる。
【0113】
【表1】
【0114】
(注記)「ウィンドウサイズ」、「データ転送率」および「システムのデータ転送率」は、8ビットのA/Dおよび50MHzのサンプリング周波数を想定することにより、それぞれの他のものから導出することができる。
【0115】
* 受信局(例えばB)毎の同一の記録ウィンドウを、すべての式(例えばA-B、B-C)に適用することができる。
【0116】
これに添えて用語「ユニット」(例えば、アンテナユニット42、第1の受信ユニット44、記録ユニット48、送信ユニット49、第2の受信ユニット46、送信ユニット22、受信ユニット24、相関ユニット26、オフセットおよび/またはサイズの計算ユニット28)が用いられる場合、ユニットの構成要素をどのように配置するかということには制限がない。すなわち、ユニットの構成要素は、意図した機能をもたらすための別々のソフトウェアもしくはハードウェアのコンポーネントまたはデバイスの中に配置されてよい。さらに、ユニットのうちいくつかは、それらの機能を遂行するために、単一ユニットを組み合わせることにより集約されてよい。
【0117】
前述のユニットは、ハードウェア、ソフトウェア、ハードウェアとソフトウェアとの組合せ、あらかじめプログラムされたASIC(特定用途向け集積回路)などを用いて実施することができる。ユニットは、コンピュータ処理ユニット(CPU)、記憶ユニット、入出力(I/0)ユニット、ネットワーク接続ユニットなどを含むことができる。
【0118】
本発明が詳細な実施例に基づいて説明されてきたが、詳細な実施例は、当業者に対してよりよい理解をもたらすのみであって本発明の範囲を制限するようには意図されていない。本発明の範囲は、むしろ添付の特許請求の範囲によって定義される。
【符号の説明】
【0119】
2 処理局
4、4a、4b、4c、4d 受信局
6 宇宙船
8、84a、84b、84c、84d 記録ウィンドウ
size4a 記録ウィンドウ84aのサイズ
size4b 記録ウィンドウ84bのサイズ
size4c 記録ウィンドウ84cのサイズ
size4d 記録ウィンドウ84dのサイズ
Δt4a、Δt4b、Δt4c、Δt4d オフセット
22 送信器
24 受信器
26 相関器
28 オフセットおよび/またはサイズの計算ユニット
42 アンテナ
44 第1の受信器
46 第2の受信器
48 記録器
49 送信器
110 記録および送信のプロシージャ
112 記録するステップ
114 送信するステップ
120 相関をとるステップ
131 距離差値の演繹的情報の有無を判定するステップ
132 同一のウィンドウサイズを設定し、オフセットは設定しないステップ
133 ウィンドウのオフセットおよび別々のサイズを設定するステップ
134 データを最適化するステップ
135 相関追跡パラメータを生成するステップ
【特許請求の範囲】
【請求項1】
宇宙船(6)の位置を推定するためのシステムであって、
宇宙船(6)から送信される信号を受信するように構成された複数の受信局(4)と、
前記複数の受信局(4)からデータを受信するように構成された処理局(2)と、
を含み、
前記受信局(4)のそれぞれは、ここで記録ウィンドウ(8)と称される時間ウィンドウ(8)の期間中に前記宇宙船(6)から送信された前記信号を記録して、前記記録ウィンドウ(8)の期間中に記録された前記信号を表すデータを前記処理局(2)へ送信するように構成され、
前記受信局(4)のそれぞれに関連した前記記録ウィンドウ(8)は、互いにオフセットするように、かつ/または別々のサイズに構成され、
前記処理局(2)は、前記宇宙船(6)と前記複数の受信局(4)の中の少なくとも1つの対の各受信局(4)との距離間の差を推定し、それに基づいて前記宇宙船(6)の位置を推定するために、前記記録された信号の相関をとるように構成されていることを特徴とするシステム。
【請求項2】
2つの受信局(4)に関連した前記記録ウィンドウ(8)間の前記オフセットおよび/または前記記録ウィンドウ(8)のそれぞれの前記サイズは、前記宇宙船(6)の前記位置および/または前記少なくとも1つの距離差、および前記2つの受信局(4)の位置に関する情報に基づいて計算されるように構成されることを特徴とする請求項1に記載のシステム。
【請求項3】
前記オフセットおよび/または前記サイズは、前記処理局(2)によって計算されるように構成されることを特徴とする請求項2に記載のシステム。
【請求項4】
前記宇宙船(6)の位置を推定し、かつ追跡するために、2つの受信局(4)に関連した前記記録ウィンドウ(8)間の前記オフセットおよび/または前記記録ウィンドウ(8)のそれぞれの前記サイズは、前記宇宙船(6)の位置および/または前記処理局(2)によって推定された前記少なくとも1つの距離差に関する情報に基づいて、もしくはさらに基づいて計算されるように構成されることを特徴とする請求項1から3のいずれか一項に記載のシステム。
【請求項5】
前記オフセットおよび/または前記サイズは、第1の記録動作から導出した前記推定された前記宇宙船(6)の位置および/または前記少なくとも1つの距離差に基づいて前記第1の記録動作と第2の記録動作との間に計算されるように構成されることを特徴とする請求項4に記載のシステム。
【請求項6】
前記受信局(4)のうち少なくとも1つは、前記宇宙船(6)の主ローブダウンリンクのフットプリントの外部に配置されることを特徴とする請求項1から5のいずれか一項に記載のシステム。
【請求項7】
各記録ウィンドウ(8)は、4マイクロ秒と2ミリ秒との間に含まれるサイズを有することを特徴とする請求項1から6のいずれか一項に記載のシステム。
【請求項8】
宇宙船(6)から送信される信号を受信するように構成された複数の受信局(4)、および前記複数の受信局(4)からデータを受信するように構成された処理局(2)を使用して前記宇宙船(6)の位置を推定する方法であって、
前記宇宙船(6)から送信される前記信号を、ここでは記録ウィンドウ(8)と称される時間ウィンドウ(8)の期間中に前記受信局(4)のそれぞれによって記録するステップ(112)と、および前記記録ウィンドウ(8)の期間中に記録された前記信号を表すデータを、前記受信局(4)のそれぞれによって前記処理局(2)へ送信するステップ(114)と、を含む記録および送信のプロシージャ(110)と、
前記宇宙船(6)と前記複数の受信局(4)の中の少なくとも1つの対の各受信局(4)との距離間の差を推定し、それに基づいて前記宇宙船(6)の位置を推定するために、前記処理局(2)によって、前記記録された信号の相関をとるステップを含む相関プロシージャ(120)と、を含み、
前記受信局(4)のそれぞれに関連した前記記録ウィンドウ(8)は、互いにオフセットされ、かつ/または別々のサイズであることを特徴とする方法。
【請求項9】
2つの受信局(4)に関連した前記記録ウィンドウ(8)間の前記オフセットおよび/または前記記録ウィンドウ(8)のそれぞれの前記サイズは、前記宇宙船(6)の前記位置および/または少なくとも1つの距離差、および前記2つの受信局(4)の位置に関する情報に基づいて計算されることを特徴とする請求項8に記載の方法。
【請求項10】
前記オフセットおよび/または前記サイズは、前記処理局(2)によって計算されることを特徴とする請求項9に記載の方法。
【請求項11】
前記宇宙船(6)の位置を推定し、かつ追跡するために、2つの受信局(4)に関連した前記記録ウィンドウ(8)間の前記オフセットおよび/または前記記録ウィンドウ(8)のそれぞれの前記サイズは、前記宇宙船(6)の位置および/または前記処理局(2)によって推定された前記少なくとも1つの距離差に関する情報に基づいて、もしくはさらに基づいて計算されることを特徴とする請求項8から10のいずれか一項に記載の方法。
【請求項12】
前記オフセットおよび/または前記サイズは、第1の記録動作から導出した前記推定された前記宇宙船(6)の位置および/または前記少なくとも1つの距離差に基づいて前記第1の記録動作と第2の記録動作との間に計算されることを特徴とする請求項11に記載の方法。
【請求項13】
前記受信局(4)のうち少なくとも1つは、前記宇宙船(6)の主ローブダウンリンクのフットプリントの外部に配置されることを特徴とする請求項8から12のいずれか一項に記載の方法。
【請求項14】
各記録ウィンドウ(8)は、4マイクロ秒と2ミリ秒との間に含まれるサイズを有することを特徴とする請求項8から13のいずれか一項に記載の方法。
【請求項15】
宇宙船(6)の位置の推定に関与するための受信局(4)であって、
前記宇宙船(6)から送信される信号を受信するように構成された第1の受信器(44)と、
処理局(2)から時間ウィンドウ(8)の開始命令としてのトリガ時間の指示および/または前記時間ウィンドウ(8)のサイズの命令としてウィンドウサイズの指示を受信するように構成された第2の受信器(46)と、
前記宇宙船(6)から送信して受信された信号のトリガ時間の指示および/またはウィンドウサイズの指示に従って開始された、ここでは記録ウィンドウ(8)と称される前記時間ウィンドウ(8)の期間中、記録をとるように構成された記録器(48)と、
前記記録ウィンドウ(8)の期間中に記録された前記信号を表すデータを前記処理局(2)へ送信するように構成された送信器(49)と、
を備えることを特徴とする受信局(4)。
【請求項16】
前記宇宙船(6)の主ローブダウンリンクのフットプリントの外部に配置されることを特徴とする請求項15に記載の受信局(4)。
【請求項17】
宇宙船(6)の位置の推定に関与するための処理局(2)であって、
ここでは記録ウィンドウ(8)と称される時間ウィンドウ(8)の開始を指すトリガ時間の指示および/または前記記録ウィンドウ(8)のサイズの命令としてのウィンドウサイズ指示を、前記宇宙船(6)から送信される信号を受信するように構成された複数の受信局(4)のそれぞれへ送信するように構成された送信器(22)と、
前記宇宙船(6)から送信して前記記録ウィンドウ(8)の期間中に記録された信号を表すデータを、前記複数の受信局(4)のそれぞれから受信するように構成された受信器(24)と、
前記宇宙船(6)と前記複数の受信局(4)の中の少なくとも1つの対の各受信局(4)との距離間の差を推定し、それに基づいて前記宇宙船(6)の位置を推定するために、前記記録された信号の相関をとるように構成された相関器(26)と、
を備え、
前記受信局(4)のそれぞれに関連した前記記録ウィンドウ(8)は、互いにオフセットするように、かつ/または別々のサイズに構成されていることを特徴とする処理局(2)。
【請求項18】
2つの受信局(4)に関連した前記記録ウィンドウ(8)間の前記オフセットおよび/または前記記録ウィンドウ(8)のそれぞれの前記サイズは、前記処理局(2)によって、前記宇宙船(6)の前記位置および/または前記少なくとも1つの距離差、および前記2つの受信局(4)の位置に関する情報に基づいて計算されるように構成されることを特徴とする請求項17に記載の処理局(2)。
【請求項19】
前記宇宙船(6)の位置を推定し、かつ追跡するために、2つの受信局(4)に関連した前記記録ウィンドウ(8)間の前記オフセットおよび/または前記記録ウィンドウ(8)のそれぞれの前記サイズは、前記処理局(2)によって、前記宇宙船(6)の位置および/または前記処理局(2)によって推定された前記少なくとも1つの距離差に関する情報に基づいて、もしくはさらに基づいて計算されるように構成されることを特徴とする請求項17または18に記載の処理局(2)。
【請求項20】
前記オフセットおよび/またはサイズは、第1の記録動作から導出した前記推定された前記宇宙船(6)の位置および/または前記少なくとも1つの距離差に基づいて前記第1の記録動作と第2の記録動作との間に計算されるように構成されることを特徴とする請求項19に記載の処理局(2)。
【請求項21】
各記録ウィンドウ(8)は、4マイクロ秒と2ミリ秒との間に含まれるサイズを有することを特徴とする請求項17から20のいずれか一項に記載の処理局(2)。
【請求項22】
受信局(4)または処理局(2)で実行されたとき、請求項8から14のいずれか一項に記載の方法の前記受信局に特有のプロシージャまたは前記処理局に特有のプロシージャをそれぞれ実行するように構成されていることを特徴とするコンピュータプログラム。
【請求項1】
宇宙船(6)の位置を推定するためのシステムであって、
宇宙船(6)から送信される信号を受信するように構成された複数の受信局(4)と、
前記複数の受信局(4)からデータを受信するように構成された処理局(2)と、
を含み、
前記受信局(4)のそれぞれは、ここで記録ウィンドウ(8)と称される時間ウィンドウ(8)の期間中に前記宇宙船(6)から送信された前記信号を記録して、前記記録ウィンドウ(8)の期間中に記録された前記信号を表すデータを前記処理局(2)へ送信するように構成され、
前記受信局(4)のそれぞれに関連した前記記録ウィンドウ(8)は、互いにオフセットするように、かつ/または別々のサイズに構成され、
前記処理局(2)は、前記宇宙船(6)と前記複数の受信局(4)の中の少なくとも1つの対の各受信局(4)との距離間の差を推定し、それに基づいて前記宇宙船(6)の位置を推定するために、前記記録された信号の相関をとるように構成されていることを特徴とするシステム。
【請求項2】
2つの受信局(4)に関連した前記記録ウィンドウ(8)間の前記オフセットおよび/または前記記録ウィンドウ(8)のそれぞれの前記サイズは、前記宇宙船(6)の前記位置および/または前記少なくとも1つの距離差、および前記2つの受信局(4)の位置に関する情報に基づいて計算されるように構成されることを特徴とする請求項1に記載のシステム。
【請求項3】
前記オフセットおよび/または前記サイズは、前記処理局(2)によって計算されるように構成されることを特徴とする請求項2に記載のシステム。
【請求項4】
前記宇宙船(6)の位置を推定し、かつ追跡するために、2つの受信局(4)に関連した前記記録ウィンドウ(8)間の前記オフセットおよび/または前記記録ウィンドウ(8)のそれぞれの前記サイズは、前記宇宙船(6)の位置および/または前記処理局(2)によって推定された前記少なくとも1つの距離差に関する情報に基づいて、もしくはさらに基づいて計算されるように構成されることを特徴とする請求項1から3のいずれか一項に記載のシステム。
【請求項5】
前記オフセットおよび/または前記サイズは、第1の記録動作から導出した前記推定された前記宇宙船(6)の位置および/または前記少なくとも1つの距離差に基づいて前記第1の記録動作と第2の記録動作との間に計算されるように構成されることを特徴とする請求項4に記載のシステム。
【請求項6】
前記受信局(4)のうち少なくとも1つは、前記宇宙船(6)の主ローブダウンリンクのフットプリントの外部に配置されることを特徴とする請求項1から5のいずれか一項に記載のシステム。
【請求項7】
各記録ウィンドウ(8)は、4マイクロ秒と2ミリ秒との間に含まれるサイズを有することを特徴とする請求項1から6のいずれか一項に記載のシステム。
【請求項8】
宇宙船(6)から送信される信号を受信するように構成された複数の受信局(4)、および前記複数の受信局(4)からデータを受信するように構成された処理局(2)を使用して前記宇宙船(6)の位置を推定する方法であって、
前記宇宙船(6)から送信される前記信号を、ここでは記録ウィンドウ(8)と称される時間ウィンドウ(8)の期間中に前記受信局(4)のそれぞれによって記録するステップ(112)と、および前記記録ウィンドウ(8)の期間中に記録された前記信号を表すデータを、前記受信局(4)のそれぞれによって前記処理局(2)へ送信するステップ(114)と、を含む記録および送信のプロシージャ(110)と、
前記宇宙船(6)と前記複数の受信局(4)の中の少なくとも1つの対の各受信局(4)との距離間の差を推定し、それに基づいて前記宇宙船(6)の位置を推定するために、前記処理局(2)によって、前記記録された信号の相関をとるステップを含む相関プロシージャ(120)と、を含み、
前記受信局(4)のそれぞれに関連した前記記録ウィンドウ(8)は、互いにオフセットされ、かつ/または別々のサイズであることを特徴とする方法。
【請求項9】
2つの受信局(4)に関連した前記記録ウィンドウ(8)間の前記オフセットおよび/または前記記録ウィンドウ(8)のそれぞれの前記サイズは、前記宇宙船(6)の前記位置および/または少なくとも1つの距離差、および前記2つの受信局(4)の位置に関する情報に基づいて計算されることを特徴とする請求項8に記載の方法。
【請求項10】
前記オフセットおよび/または前記サイズは、前記処理局(2)によって計算されることを特徴とする請求項9に記載の方法。
【請求項11】
前記宇宙船(6)の位置を推定し、かつ追跡するために、2つの受信局(4)に関連した前記記録ウィンドウ(8)間の前記オフセットおよび/または前記記録ウィンドウ(8)のそれぞれの前記サイズは、前記宇宙船(6)の位置および/または前記処理局(2)によって推定された前記少なくとも1つの距離差に関する情報に基づいて、もしくはさらに基づいて計算されることを特徴とする請求項8から10のいずれか一項に記載の方法。
【請求項12】
前記オフセットおよび/または前記サイズは、第1の記録動作から導出した前記推定された前記宇宙船(6)の位置および/または前記少なくとも1つの距離差に基づいて前記第1の記録動作と第2の記録動作との間に計算されることを特徴とする請求項11に記載の方法。
【請求項13】
前記受信局(4)のうち少なくとも1つは、前記宇宙船(6)の主ローブダウンリンクのフットプリントの外部に配置されることを特徴とする請求項8から12のいずれか一項に記載の方法。
【請求項14】
各記録ウィンドウ(8)は、4マイクロ秒と2ミリ秒との間に含まれるサイズを有することを特徴とする請求項8から13のいずれか一項に記載の方法。
【請求項15】
宇宙船(6)の位置の推定に関与するための受信局(4)であって、
前記宇宙船(6)から送信される信号を受信するように構成された第1の受信器(44)と、
処理局(2)から時間ウィンドウ(8)の開始命令としてのトリガ時間の指示および/または前記時間ウィンドウ(8)のサイズの命令としてウィンドウサイズの指示を受信するように構成された第2の受信器(46)と、
前記宇宙船(6)から送信して受信された信号のトリガ時間の指示および/またはウィンドウサイズの指示に従って開始された、ここでは記録ウィンドウ(8)と称される前記時間ウィンドウ(8)の期間中、記録をとるように構成された記録器(48)と、
前記記録ウィンドウ(8)の期間中に記録された前記信号を表すデータを前記処理局(2)へ送信するように構成された送信器(49)と、
を備えることを特徴とする受信局(4)。
【請求項16】
前記宇宙船(6)の主ローブダウンリンクのフットプリントの外部に配置されることを特徴とする請求項15に記載の受信局(4)。
【請求項17】
宇宙船(6)の位置の推定に関与するための処理局(2)であって、
ここでは記録ウィンドウ(8)と称される時間ウィンドウ(8)の開始を指すトリガ時間の指示および/または前記記録ウィンドウ(8)のサイズの命令としてのウィンドウサイズ指示を、前記宇宙船(6)から送信される信号を受信するように構成された複数の受信局(4)のそれぞれへ送信するように構成された送信器(22)と、
前記宇宙船(6)から送信して前記記録ウィンドウ(8)の期間中に記録された信号を表すデータを、前記複数の受信局(4)のそれぞれから受信するように構成された受信器(24)と、
前記宇宙船(6)と前記複数の受信局(4)の中の少なくとも1つの対の各受信局(4)との距離間の差を推定し、それに基づいて前記宇宙船(6)の位置を推定するために、前記記録された信号の相関をとるように構成された相関器(26)と、
を備え、
前記受信局(4)のそれぞれに関連した前記記録ウィンドウ(8)は、互いにオフセットするように、かつ/または別々のサイズに構成されていることを特徴とする処理局(2)。
【請求項18】
2つの受信局(4)に関連した前記記録ウィンドウ(8)間の前記オフセットおよび/または前記記録ウィンドウ(8)のそれぞれの前記サイズは、前記処理局(2)によって、前記宇宙船(6)の前記位置および/または前記少なくとも1つの距離差、および前記2つの受信局(4)の位置に関する情報に基づいて計算されるように構成されることを特徴とする請求項17に記載の処理局(2)。
【請求項19】
前記宇宙船(6)の位置を推定し、かつ追跡するために、2つの受信局(4)に関連した前記記録ウィンドウ(8)間の前記オフセットおよび/または前記記録ウィンドウ(8)のそれぞれの前記サイズは、前記処理局(2)によって、前記宇宙船(6)の位置および/または前記処理局(2)によって推定された前記少なくとも1つの距離差に関する情報に基づいて、もしくはさらに基づいて計算されるように構成されることを特徴とする請求項17または18に記載の処理局(2)。
【請求項20】
前記オフセットおよび/またはサイズは、第1の記録動作から導出した前記推定された前記宇宙船(6)の位置および/または前記少なくとも1つの距離差に基づいて前記第1の記録動作と第2の記録動作との間に計算されるように構成されることを特徴とする請求項19に記載の処理局(2)。
【請求項21】
各記録ウィンドウ(8)は、4マイクロ秒と2ミリ秒との間に含まれるサイズを有することを特徴とする請求項17から20のいずれか一項に記載の処理局(2)。
【請求項22】
受信局(4)または処理局(2)で実行されたとき、請求項8から14のいずれか一項に記載の方法の前記受信局に特有のプロシージャまたは前記処理局に特有のプロシージャをそれぞれ実行するように構成されていることを特徴とするコンピュータプログラム。
【図1】

【図2】
【図3a】
【図3b】
【図4】
【図5】
【図6】
【図7a】
【図7b】
【図8】
【図2】
【図3a】
【図3b】
【図4】
【図5】
【図6】
【図7a】
【図7b】
【図8】
【公表番号】特表2011−528796(P2011−528796A)
【公表日】平成23年11月24日(2011.11.24)
【国際特許分類】
【出願番号】特願2011−519170(P2011−519170)
【出願日】平成21年7月23日(2009.7.23)
【国際出願番号】PCT/EP2009/059483
【国際公開番号】WO2010/010143
【国際公開日】平成22年1月28日(2010.1.28)
【出願人】(501313458)エスエーエス−アストラ エス ア (2)
【住所又は居所原語表記】L−6815 Chateau de Betzdorf Luxembourg
【Fターム(参考)】
【公表日】平成23年11月24日(2011.11.24)
【国際特許分類】
【出願日】平成21年7月23日(2009.7.23)
【国際出願番号】PCT/EP2009/059483
【国際公開番号】WO2010/010143
【国際公開日】平成22年1月28日(2010.1.28)
【出願人】(501313458)エスエーエス−アストラ エス ア (2)
【住所又は居所原語表記】L−6815 Chateau de Betzdorf Luxembourg
【Fターム(参考)】
[ Back to top ]