
安全スイッチ

【課題】操作ロッドが破損したり、操作部が破損したり脱落した場合に開閉器を開状態にすることで安全性の向上を図るとともに、簡易な構成で小型化を図ることができる安全スイッチを提供する。
【解決手段】アクチュエータ3の操作部5からの引抜操作の操作力や操作回数が破壊を招かない許容値を超えることにより、回転軸13の操作部5内での支持状態が解除されても、操作ロッド21のコイルばね50の付勢方向への移動が許容されて操作ロッド21が確実に操作部5側へ移動するので第1開閉器39を確実に開状態とすることができ、安全性の向上を図ることができる。また、安全スイッチの異常時の操作ロッド21の移動状態を検出するための開閉器を別途設けたりしなくともよいため、簡易な構成で安全スイッチの小型化を図ることができる。
【解決手段】アクチュエータ3の操作部5からの引抜操作の操作力や操作回数が破壊を招かない許容値を超えることにより、回転軸13の操作部5内での支持状態が解除されても、操作ロッド21のコイルばね50の付勢方向への移動が許容されて操作ロッド21が確実に操作部5側へ移動するので第1開閉器39を確実に開状態とすることができ、安全性の向上を図ることができる。また、安全スイッチの異常時の操作ロッド21の移動状態を検出するための開閉器を別途設けたりしなくともよいため、簡易な構成で安全スイッチの小型化を図ることができる。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、例えば産業機械等の防護扉周縁の壁面に取り付けられ、防護扉が開かれたときには、産業機械等への電源供給を停止する安全スイッチに関する。
【背景技術】
【0002】
従来、産業機械の防護扉などには、作業者が機械に巻き込まれて負傷するといったトラブルの発生を防止することを目的として、防護扉が完全に閉まっていないときには、機械を駆動させないようにする安全スイッチが配設されている。
【0003】
この種の安全スイッチは、ロボット等の産業機械に電気的に接続されるもので、スイッチ本体とアクチュエータとにより構成されており、スイッチ本体は防護扉周縁の壁面に固着され、またアクチュエータは防護扉に固着される。そのときのアクチュエータの固着位置はスイッチ本体のアクチュエータ進入口に対向し、かつ、防護扉を閉鎖すればスイッチ本体上部のヘッドケース内にアクチュエータが挿入されるように設定されている(例えば特許文献1、2参照)。
【0004】
そして、アクチュエータがヘッドケース内に挿入されることにより、スイッチ本体のヘッドケース(操作部)の下方に位置する内蔵の開閉器が閉に切り換わり、産業機械へ電源が供給されて機械が駆動可能な状態となる。一方、防護扉の開放によりアクチュエータがヘッドケースから引抜かれると、内蔵の開閉器が開に切り換わり、機械への電源供給が遮断される。
【0005】
ところで、操作部の中央には、操作部の下方に位置するスイッチ部の操作ロッドを移動させて開閉器を開閉するための駆動カムが設けられている。この駆動カムはその回転軸が操作部におけるケース部材の内面に枢支されて回転自在に支持されている。また、操作ロッドは、内蔵の開閉器が閉に切り換わる移動方向である操作部の方向に向ってコイルバネで付勢されている。
【0006】
そして、アクチュエータが操作部に挿入されていない状態では、操作ロッドは、コイルバネの付勢力に抗して駆動カムによりスイッチ部側へ押圧されており、内蔵の開閉器は開状態となり産業機械への電源供給が遮断されている。一方、専用のアクチュエータが操作部内に挿入されると、アクチュエータの連結片が駆動カムを押圧して、駆動カムが回転し、その結果、操作ロッドがコイルバネの付勢力により駆動カム側へ移動し、内蔵の開閉器は閉状態に切り換わり産業機械への電源供給が行われる。
【0007】
ところで、上記した安全スイッチには、操作部とスイッチ部とが着脱自在に構成されているものがある。このように、操作部とスイッチ部とが着脱自在に構成されている場合、安全スイッチに過度の衝撃が加わるなどして操作部がスイッチ部から脱離するおそれがある。例えば、アクチュエータが操作部に進入していない状態で、すなわち駆動カムにより操作ロッドがスイッチ部側へ押圧されてスイッチ部の開閉器が開状態である場合に、安全スイッチの操作部がスイッチ部から脱離すれば、駆動カムによる操作ロッドのスイッチ部側への押圧が解除されるので、操作ロッドはコイルバネの付勢力により操作部の方向に移動する。そして、この操作ロッドの操作部側への移動により、アクチュエータが操作部に挿入されていないにも関わらず、スイッチ部の開閉器が閉状態に切り換わり産業機械に電源供給される。このように、操作部とスイッチ部とが脱離するという異常が発生した場合の対策として、上記した特許文献1,2に記載の安全スイッチでは、以下に示す対策を施すことで、操作部とスイッチ部との脱離の検出、あるいは操作部がスイッチ部から脱離することによる誤動作が防止されている。
【0008】
まず、特許文献1に記載の安全スイッチでは回転自在なフィーラ部材を備え、フィーラ部材は、操作ロッドと係脱自在な係合端を有し、操作部がスイッチ部から脱離すれば、操作部による係止が解除されてバネによる付勢力により回転し、係合端が操作ロッドに係合するとともに操作ロッドをスイッチ部側へ移動させる。このように構成すると、操作部がスイッチ部から脱離しても、操作部により係止されていたフィーラ部材がバネによる付勢力によって回転するとともに、係合端が操作ロッドに係合して操作ロッドをスイッチ部側に移動させるため、スイッチ部の開閉器は開状態に維持されて産業機械等への電源供給が遮断される。
【0009】
また、特許文献2に記載の安全スイッチでは、操作部がスイッチ部から脱離することで駆動カムによる操作ロッドのスイッチ部側への押圧が解除されて、操作ロッドがバネによる付勢力で操作部側に過剰変位した場合に開状態に切り換わる変位検知手段としての開閉器を備えている。したがって、変位検知手段としての開閉器を、外部に別途備えた補助電源スイッチや警報装置と接続することで、操作部がスイッチ部から脱離してこの開閉器が開状態となったことを検知することができ、この検知結果に応じて電源スイッチを切ったり、警報装置を作動させて故障の発生を報知することが可能となる。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特表平11−502669号公報(第9頁、第10頁、図3,6)
【特許文献2】特開2003−31084号公報([0035]〜[0038]、図4)
【発明の概要】
【発明が解決しようとする課題】
【0011】
ところで、上記した安全スイッチでは、外部からのアクチュエータの操作部への挿入操作、操作部からの引抜操作を繰返すたびに、操作部に設けられた駆動カムが回転し、駆動カムの外周面と操作ロッドとが摺接する。このように、駆動カムの外周面と操作ロッドとが摺接するたびに、駆動カムの外周面と操作ロッドとの間で、操作ロッドの長手方向にほぼ直交する方向へ摩擦力が発生する。そのため、この摩擦力が繰返し操作ロッドや駆動カムに加わることで操作ロッドや駆動カムに疲労が蓄積し、操作ロッドや駆動カムが磨耗し破損するおそれがある。また、外的負荷により操作ロッドが途中で折れたり、駆動カムが破損することもある。
【0012】
このように、操作ロッドや駆動カムが破損すれば、操作ロッドと駆動カムとの摺接状態が解除されるため、駆動カムによりスイッチ部側に押圧されていた操作ロッドがコイルバネの付勢力で駆動カム側へ移動する。したがって、アクチュエータが操作部に挿入されていないにも関わらず、内蔵の開閉器が閉状態となる。このような異常が発生した場合、特許文献1に記載の安全スイッチでは、操作部がスイッチ部から脱離しなければフィーラ部材が回転しないため、フィーラ部材の係合端が操作ロッドに係合することはなく操作ロッドは操作部側へ移動し、安全スイッチに異常が発生しているにも関わらず産業機械等へ電源が供給される。また、フィーラ部材により操作ロッドをスイッチ部側へ移動させる構成は複雑で、小型化が困難であった。
【0013】
一方、特許文献2に記載の安全スイッチでは、安全スイッチに異常が発生して、操作ロッドが操作部側に過剰変位すれば、変位検知手段としての開閉器が開状態に切り換わるため、安全スイッチに何らかの異常が発生したことを検知することができる。しかしながら、操作ロッドの過剰変位を検知するための開閉器を、産業機械等の電源供給用の開閉器とは別に設けなければならないため、変位検知手段としての開閉器を備えた安全スイッチの小型化を妨げていた。
【0014】
本発明は、上記課題に鑑みてなされたものであり、操作ロッドが破損したり、操作部が破損したり脱落した場合に開閉器を開状態にすることで安全性の向上を図るとともに、簡易な構成で小型化を図ることができる安全スイッチを提供することを目的とする。
【課題を解決するための手段】
【0015】
上記した課題を解決するため、本発明にかかる安全スイッチは、外部からのアクチュエータの挿入操作、引抜操作に応じて作動する作動部材が設けられた操作部と、可動接点および固定接点を有する第1開閉器が設けられたスイッチ部と、前記可動接点を前記固定接点から開離する方向に付勢する付勢手段と、前記作動部材の作動に連動し、前記挿入操作による前記作動部材の作動時に前記付勢手段の付勢力に抗しつつ移動して前記可動接点を可動させて前記固定接点に接触させ、前記引抜操作による前記作動部材の作動時に前記付勢手段の付勢力により移動して前記可動接点を前記挿入操作時とは逆方向に可動させて前記固定接点から開離させる操作ロッドとを備える安全スイッチにおいて、破壊したときに、少なくとも前記操作ロッドの前記付勢手段の付勢方向への移動を許容する構造を備えることを特徴としている(請求項1)。
【0016】
このように構成された発明では、スイッチ部の第1開閉器の可動接点が付勢手段によって固定接点に対して開離する開方向に付勢されており、アクチュエータの操作部への挿入操作に伴う作動部材の作動により、操作ロッドは付勢手段の付勢力に抗しつつ移動して可動接点を可動させて固定接点に接触させ、第1開閉器を閉状態に切換える。また、アクチュエータの操作部からの引抜操作による作動部材の作動により、操作ロッドは付勢手段の付勢力により移動して可動接点をアクチュエータの操作部への挿入操作時とは逆方向に可動させて固定接点から開離させ、第1開閉器を開状態に切換える。そして、破壊したときに、少なくとも操作ロッドの付勢手段の付勢方向への移動を許容する構造を備えている。
【0017】
したがって、操作ロッドが破損した場合や、操作部が破損したりした場合であっても、操作ロッドの付勢手段の付勢方向への移動を許容する構造が破壊することにより操作ロッドの付勢手段の付勢方向への移動が許容されるため、操作ロッドが付勢手段の付勢力により確実に移動するので、可動接点が固定接点から開離するように可動して第1開閉器を確実に開状態とすることができ、安全性の向上を図ることができる。また、付勢手段の付勢方向への操作ロッドの移動が許容されたときの操作ロッドの移動を検出するために開閉器を別途設けたりしなくともよいため、簡易な構成で安全スイッチの小型化を図ることができる。
【0018】
このとき、前記構造は、前記引抜操作の少なくとも操作力または操作回数が破壊を招かない許容値を超えるときに、少なくとも前記操作ロッドの前記付勢手段の付勢方向への移動を許容するように構成するのがよい(請求項2)。
【0019】
ところで、アクチュエータの操作部からの引抜操作の操作力が安全スイッチの破壊を招かない許容値である設計上の強度を超えた場合に、操作ロッドが途中で折れるなどして破損したり、操作部が破損したりするおそれがある。また、アクチュエータの操作部からの引抜操作の操作回数が安全スイッチの破壊を招かない許容値である設計上の耐久度を超えた場合に、繰返し生じる摩擦力により、操作ロッドが途中で曲がったり折れるなどして破損したり、操作部の駆動カムが破損したりするおそれがある。
【0020】
しかしながら、上記した構成とすれば、アクチュエータの引抜操作の少なくとも操作力または操作回数が破壊を招かない許容値を超えるときに、少なくとも操作ロッドの付勢手段の付勢方向への移動を許容する構造を備えており、操作ロッドの付勢手段の付勢方向への移動が許容されて操作ロッドが移動すれば、第1開閉器の可動接点は固定接点に対して開離する方向に移動する。したがって、何らかの外的負荷が操作ロッドに加わり、操作ロッドが破損した場合や、何らかの外的負荷が操作部に加わり、操作部が破損したりした場合であっても、操作ロッドの付勢手段の付勢方向への移動を許容する構造が作用することにより、付勢手段の付勢力により操作ロッドが移動して可動接点を確実に固定接点から開離して第1開閉器を開状態とすることができる。
【0021】
また、前記作動部材は前記挿入操作および前記引抜操作に応じて両方向に回転する駆動カムであり、前記操作ロッドは、前記駆動カムの回転に連動し、前記挿入操作による前記駆動カムの回転時に前記付勢手段の付勢力に抗しつつ移動して前記可動接点を可動させて前記固定接点に接触させ、前記引抜操作による前記駆動カムの回転時に前記付勢手段の付勢力により移動して前記可動接点を前記挿入操作時とは逆方向に可動させて前記固定接点から開離させるようにしてもよい(請求項3)。
【0022】
このような構成すれば、アクチュエータの操作部への挿入操作に伴う駆動カムの回転により、操作ロッドは付勢手段の付勢力に抗しつつ移動して可動接点を可動させて固定接点に接触させ、第1開閉器を閉状態に切換える。また、アクチュエータの操作部からの引抜操作による駆動カムの回転により、操作ロッドは付勢手段の付勢力により移動して可動接点をアクチュエータの操作部への挿入操作時とは逆方向に可動させて固定接点から開離させ、第1開閉器を開状態に切換える。
【0023】
そして、操作ロッドが破損した場合や、操作部が破損したり脱落した場合であっても、操作ロッドの付勢手段の付勢方向への移動を許容する構造が破壊することにより操作ロッドの付勢手段の付勢方向への移動が許容されるため、操作ロッドが付勢手段の付勢力により確実に移動するので、可動接点が固定接点から開離するように可動して第1開閉器を確実に開状態とすることができ、安全性の向上を図ることができる。
【0024】
また、前記構造は、前記駆動カムを支持する支持部に形成されていてもよく(請求項4)、前記スイッチ部は前記操作部に結合可能に形成され、前記構造は、前記操作部と前記スイッチ部との結合部分に形成されていてもよい(請求項5)。
【0025】
このような構成とすれば、アクチュエータの操作部からの引抜操作の操作力や操作回数が破壊を招かない許容値を超えるなどすれば、駆動カムの支持部や操作部とスイッチ部との結合部分に形成された構造が作用して、操作ロッドの付勢手段の付勢方向への移動を許容するように、駆動カムをスイッチ部に対する相対的な設計上の通常位置から移動させるため、確実に操作ロッドが付勢手段の付勢力により移動することができ、可動接点が固定接点から開離するように可動して第1開閉器を確実に開状態とすることができる。
【0026】
また、前記操作ロッドを前記駆動カムの回転に連動するように前記駆動カムに連結する連結手段をさらに備え、前記駆動カムには、径大部と径小部とを有するカム曲線状のガイド部が形成され、前記引抜操作による前記駆動カムの回転時に、前記連結手段が前記ガイド部に沿って前記径大部から前記径小部へ移動することに伴い、前記付勢手段による付勢力に加えて前記操作ロッドを移動させて前記第1開閉器を開状態に切換えるようにしてもよい(請求項6)。
【0027】
このような構成とすれば、連結手段により操作ロッドが駆動カムに連結されているため、アクチュエータの挿入操作、引抜操作に伴う駆動カムの両方向への回転に応じて操作ロッドを確実に往復運動させてスイッチ部の第1開閉器の開閉状態を切換えることができる。さらに、アクチュエータの操作部からの引抜操作による駆動カムの回転時に、連結手段が径大部から径小部へガイド部に沿って移動することに伴う操作ロッドをスイッチ部から引抜く引抜力が、付勢手段による付勢力に加えて操作ロッドを確実に移動させるため、例えば両接点に溶着が生じていても可動接点を固定接点から開離するように確実に可動して第1開閉器を開状態とすることができる。
【0028】
また、前記操作部には、前記駆動カムの回転を阻止する係止部材を有し、前記アクチュエータが前記操作部へ挿入されているときに、前記係止部材により前記駆動カムの回転を阻止することにより、前記引抜操作を阻止するロック手段がさらに設けられていてもよい(請求項7)。
【0029】
このような構成とすれば、ロック手段が駆動カムの回転を阻止することによりアクチュエータの操作部からの引抜操作を阻止することができる。このとき、強引にアクチュエータの引抜操作が行われるなどして、アクチュエータの操作部からの引抜操作の操作力や操作回数が破壊を招かない許容値を超えることにより操作ロッドが破損した場合や、操作部が破損したり脱落した場合であっても、操作ロッドの付勢手段の付勢方向への移動を許容する構造により、操作ロッドが付勢手段の付勢力により確実に移動するので、可動接点が固定接点から開離するように可動して第1開閉器を確実に開状態とすることができる。
【0030】
また、前記ロック手段による前記駆動カムの回転阻止状態と回転許容状態との間の切換えに応じて開閉状態が切換わる第2開閉器をさらに備えるようにしてもよい(請求項8)。
【0031】
このような構成とすれば、ロック手段による駆動カムの回転阻止状態のときに、強引にアクチュエータの引抜操作が行われるなどしても、操作ロッドの付勢手段の付勢方向への移動を許容する構造が破壊すれば、操作ロッドが付勢手段の付勢力により移動して、可動接点が固定接点から開離するように可動して第1開閉器が開状態となるが、ロック手段による駆動カムの回転阻止状態は回転解除状態に切換わらないため、第2開閉器の開閉状態が切換わることはない。したがって、第2開閉器の開閉状態が切換わらない状態において、第1開閉器の開閉状態のみが切換わることで、安全スイッチに何らかの異常が発生したことを確実に検出することができる。
【0032】
また、前記構造は、破壊したときに、前記挿入操作による前記作動部材の作動時の前記操作ロッドの移動による前記可動接点の前記固定接点への接触を阻止する手段を備えるようにしてもよい(請求項9)。
【0033】
このような構成とすれば、操作ロッドの付勢手段の付勢方向への移動を許容する構造が破壊したときに、アクチュエータの挿入操作による作動部材の作動時の操作ロッドの移動による可動接点の固定接点への接触が阻止される。したがって、何らかの異常が発生しているにも関わらず、アクチュエータの挿入操作が行われたときに第1開閉器が閉状態に切換わるのを確実に防止できる。
【0034】
また、本発明にかかる安全スイッチは、外部からのアクチュエータの挿入操作、引抜操作に応じて両方向に回転し、径大部と径小部を有するカム曲線状のガイド部が形成された駆動カムが設けられた操作部と、可動接点および固定接点を有する第1開閉器が設けられたスイッチ部と、前記駆動カムの回転に連動して前記操作部と前記スイッチ部との間を往復移動する操作ロッドと、前記操作ロッドを前記駆動カムの回転に連動するように前記駆動カムに連結する連結手段とを備え、前記挿入操作による前記駆動カムの回転時に前記連結手段が前記ガイド部に沿って前記径小部から前記径大部へ移動するのに前記操作ロッドが連動して前記可動接点を可動させて前記固定接点に接触させ、前記引抜操作による前記駆動カムの回転時に前記連結手段が前記ガイド部に沿って前記径大部から前記径小部へ移動するのに前記操作ロッドが連動して前記可動接点を前記挿入操作時とは逆方向に可動させて前記固定接点から開離させる安全スイッチにおいて、破壊したときに、少なくとも前記操作ロッドの前記引抜操作時における移動方向への移動を許容する構造を備えることを特徴としている(請求項10)。
【0035】
このように構成された発明では、アクチュエータの操作部への挿入操作に伴う駆動カムの回転により、連結手段が径小部から径大部へガイド部に沿って移動するのに伴い操作ロッドが連動してスイッチ部に押込まれて可動接点を可動させ、固定接点に接触させて第1開閉器を閉状態に切換える。また、アクチュエータの操作部からの引抜操作による駆動カムの回転により、連結手段が径大部から径小部へガイド部に沿って移動するのに操作ロッドが連動してスイッチ部から引抜かれる方向に移動して可動接点をアクチュエータの操作部への挿入操作時とは逆方向に可動させて固定接点から開離させ、第1開閉器を開状態に切換える。そして、破壊したときに、少なくとも操作ロッドの引抜操作時における移動方向への移動を許容する構造を備えている。
【0036】
したがって、操作ロッドが破損した場合や、操作部が破損したり脱落したなどの破壊が生じた場合であっても、操作ロッドの引抜操作時における移動方向への移動、すなわち、操作ロッドがスイッチ部から引抜かれる方向への移動を許容する構造が作用して、アクチュエータの操作部からの引抜力により駆動カムと連結された操作ロッドが確実に移動するので、可動接点が固定接点から開離するように可動して第1開閉器を確実に開状態とすることができ、安全性の向上を図ることができる。また、スイッチ部から引抜かれる方向への操作ロッドの移動が許容されたときの操作ロッドの移動を検出するために開閉器を別途設けたりしなくともよいため、簡易な構成で安全スイッチの小型化を図ることができる。
【発明の効果】
【0037】
以上のように、請求項1に記載の発明によれば、操作ロッドが破損した場合や、操作部が破損したりした場合であっても、操作ロッドの付勢手段の付勢方向への移動を許容する構造が破壊することにより操作ロッドの付勢手段の付勢方向への移動が許容されるため、操作ロッドが付勢手段の付勢力により確実に移動するので、可動接点が固定接点から開離するように可動して第1開閉器を確実に開状態とすることができ、安全性の向上を図ることができる。また、付勢手段の付勢方向への操作ロッドの移動が許容されたときの操作ロッドの移動を検出するために開閉器を別途設けたりしなくともよいため、簡易な構成で安全スイッチの小型化を図ることができる。
【0038】
また、請求項2に記載の発明によれば、アクチュエータの引抜操作の少なくとも操作力または操作回数が破壊を招かない許容値を超えるときに、少なくとも操作ロッドの付勢手段の付勢方向への移動を許容する構造を備えており、操作ロッドの付勢手段の付勢方向への移動が許容されて操作ロッドが移動すれば、第1開閉器の可動接点は固定接点に対して開離する方向に移動するので、操作部が破損したりした場合であっても、付勢手段の付勢力により操作ロッドが移動して可動接点を確実に固定接点から開離して第1開閉器を開状態とすることができる。
【0039】
また、請求項3に記載の発明によれば、操作ロッドが破損した場合や、操作部が破損したり脱落した場合であっても、操作ロッドの付勢手段の付勢方向への移動を許容する構造が破壊することにより操作ロッドの付勢手段の付勢方向への移動が許容されるため、操作ロッドが付勢手段の付勢力により確実に移動するので、可動接点が固定接点から開離するように可動して第1開閉器を確実に開状態とすることができ、安全性の向上を図ることができる。
【0040】
また、請求項4,5に記載の発明によれば、アクチュエータの操作部からの引抜操作の操作力や操作回数が破壊を招かない許容値を超えるなどすれば、駆動カムの支持部や操作部とスイッチ部との結合部分に形成された構造が作用して、操作ロッドの付勢手段の付勢方向への移動を許容するように、駆動カムをスイッチ部に対する相対的な設計上の通常位置から移動させるため、確実に操作ロッドが付勢手段の付勢力により移動することができ、可動接点が固定接点から開離するように可動して第1開閉器を確実に開状態とすることができる。
【0041】
また、請求項6に記載の発明によれば、連結手段により操作ロッドが駆動カムに連結されているため、アクチュエータの挿入操作、引抜操作に伴う駆動カムの両方向への回転に応じて操作ロッドを確実に往復運動させてスイッチ部の第1開閉器の開閉状態を切換えることできる。さらに、アクチュエータの操作部からの引抜操作による駆動カムの回転時に、連結手段が径大部から径小部へガイド部に沿って移動することに伴う操作ロッドをスイッチ部から引抜く引抜力が、付勢手段による付勢力に加えて操作ロッドを確実に移動させるため、例えば両接点に溶着が生じていても可動接点を固定接点から開離するように確実に可動して第1開閉器を開状態とすることができる。
【0042】
また、請求項7に記載の発明によれば、ロック手段が駆動カムの回転を阻止することによりアクチュエータの操作部からの引抜操作を阻止することができる。このとき、強引にアクチュエータの引抜操作が行われるなどして、アクチュエータの操作部からの引抜操作の操作力や操作回数が破壊を招かない許容値を超えることにより操作ロッドが破損した場合や、操作部が破損したり脱落した場合であっても、操作ロッドの付勢手段の付勢方向への移動を許容する構造により、操作ロッドが付勢手段の付勢力により確実に移動するので、可動接点が固定接点から開離するように可動して第1開閉器を確実に開状態とすることができる。
【0043】
また、請求項8に記載の発明によれば、ロック手段による駆動カムの回転阻止状態のときに、強引にアクチュエータの引抜操作が行われるなどしたときに、操作ロッドの付勢手段の付勢方向への移動を許容する構造により、操作ロッドが付勢手段の付勢力により移動して、可動接点が固定接点から開離するように可動して第1開閉器が開状態となっても、ロック手段による駆動カムの回転阻止状態は回転解除状態に切換わらないため、第2開閉器の開閉状態が切換わることはない。したがって、第2開閉器の開閉状態が切換わらない状態において、第1開閉器の開閉状態のみが切換わることで、安全スイッチに何らかの異常が発生したことを確実に検出することができる。
【0044】
また、請求項9に記載の発明によれば、操作ロッドの付勢手段の付勢方向への移動を許容する構造が破壊したときに、アクチュエータの挿入操作による作動部材の作動時の操作ロッドの移動による可動接点の固定接点への接触が阻止される。したがって、何らかの異常が発生しているにも関わらず、アクチュエータの挿入操作が行われたときに第1開閉器が閉状態に切換わるのを確実に防止できる。
【0045】
また、請求項10に記載の発明によれば、操作ロッドが破損した場合や、操作部が破損したり脱落したなどの破壊が生じた場合であっても、操作ロッドの引抜操作時における移動方向への移動、すなわち、操作ロッドがスイッチ部から引抜かれる方向への移動を許容する構造が作用して、アクチュエータの操作部からの引抜力により駆動カムと連結された操作ロッドが確実に移動するので、可動接点が固定接点から開離するように可動して第1開閉器を確実に開状態とすることができ、安全性の向上を図ることができる。また、スイッチ部から引抜かれる方向への操作ロッドの移動が許容されたときの操作ロッドの移動を検出するために開閉器を別途設けたりしなくともよいため、簡易な構成で安全スイッチの小型化を図ることができる。
【図面の簡単な説明】
【0046】
【図1】この発明の第1実施形態におけるスイッチ本体の断面図である。
【図2】この発明の第1実施形態におけるスイッチ本体の断面図である。
【図3】この発明の第1実施形態におけるスイッチ本体の断面図である。
【図4】この発明の第1実施形態におけるスイッチ本体の断面図である。
【図5】この発明の第2実施形態におけるスイッチ本体の断面図である。
【図6】この発明の第2実施形態におけるスイッチ本体の断面図である。
【図7】この発明の第2実施形態におけるスイッチ本体の断面図である。
【図8】この発明の第2実施形態におけるスイッチ本体の断面図である。
【図9】この発明の第3実施形態におけるスイッチ本体の断面図である。
【図10】この発明の第3実施形態におけるスイッチ本体の断面図である。
【図11】この発明の第3実施形態におけるスイッチ本体の断面図である。
【図12】この発明の第3実施形態におけるスイッチ本体の断面図である。
【図13】この発明の第3実施形態におけるスイッチ本体の断面図である。
【図14】この発明の第3実施形態におけるスイッチ本体の断面図である。
【図15】この発明の第4実施形態におけるスイッチ本体の断面図である。
【図16】この発明の第4実施形態におけるスイッチ本体の断面図である。
【図17】この発明の第4実施形態におけるスイッチ本体の断面図である。
【図18】この発明の第4実施形態におけるスイッチ本体の断面図である。
【図19】この発明の第4実施形態におけるスイッチ本体の断面図である。
【図20】この発明の第4実施形態におけるスイッチ本体の断面図である。
【図21】この発明の第4実施形態におけるスイッチ本体の断面図である。
【図22】この発明の構造の変形例を示す図である。
【図23】この発明の構造の変形例を示す図である。
【図24】この発明の構造の変形例を示す図である。
【発明を実施するための形態】
【0047】
<第1実施形態>
この発明の第1実施形態について図1ないし図4を参照して説明する。図1ないし図4はスイッチ本体1の正面から見た断面図であり、それぞれ異なる状態を示す図である。本発明における安全スイッチは、外部装置であるロボット等の産業機械等にケーブルを介して電気的に接続されるスイッチであり、スイッチ本体1と、アクチュエータ3とにより構成される。
【0048】
このとき、スイッチ本体1は、操作部5とスイッチ部7とからなり、図示を省略する産業機械の防護扉周縁の壁面に固着される。また、アクチュエータ3は防護扉に固着され、その位置は操作部5の上面および側面に形成されたアクチュエータ進入口9a,9bのうち一方の進入口に対向する位置であり、アクチュエータ3の挿入操作に相当する防護扉の閉鎖によりアクチュエータ3は操作部5のアクチュエータ進入口9a,9b内に挿入される。なお、アクチュエータ3は、コ字状の基部3aと、該基部3aの先端寄りの両側を橋絡して一体形成された連結片3bとから構成されている。
【0049】
スイッチ本体1の上部に配設された操作部5は、図1および図2に示すように、ケース部材11と、回転軸13がこのケース部材11の内面に支持されて、アクチュエータ3の操作部5への挿入操作、操作部5からの引抜操作に応じて両方向に回転するように回転自在に設けられた駆動カム15とを備えている。この駆動カム15の上部外周面には、アクチュエータ3の連結片3bが嵌挿する係合部15a,15bが、上記したアクチュエータ進入口9a,9bから覗く位置に形成されている。また、駆動カム15の下部外周面にはカム曲線部15cが形成されており、側面には径大部と径小部とを有するカム曲線状のガイド孔15d(本発明の「ガイド部」に相当)が形成されている。また、駆動カム15のガイド孔15dが形成されている部分には、外周面から回転軸13にかけて切込15eが形成されており、後述する操作ロッド21の先端が駆動カム15の切込15e部分に挿入された状態で配設される。なお、図1に示す駆動カム15は、切込15e部分の断面を示した部分断面図であり、以下の説明で参照する図面で示す駆動カム15は、同様に全て部分断面図であり、その説明は省略する。
【0050】
また、操作部5の下方に位置するスイッチ部7から先端部分が出退自在に操作部5内に突出する操作ロッド21が設けられ、その先端部にはカムピン(本発明の「連結手段」に相当)22が直交して固着されている。そして、操作ロッド21が駆動カム15の回転に連動して往復移動するようにカムピン22の両端部がそれぞれ両駆動カム15のガイド孔15dに挿通されている。そして、駆動カム15の回転に伴ってカムピン22がガイド孔15dに沿って移動することで、操作ロッド21が操作部5に進入、後退して往復移動し、スイッチ部7に内蔵されている開閉器部70の第1開閉器39の開閉状態が切換えられる。
【0051】
また、操作ロッド21には連結用係合部23が形成されており、この連結用係合部23により操作ロッド21は上側(操作部5側)と下側(スイッチ部7側)とで係脱自在に分離可能に構成されている。したがって、分離状態の操作ロッド21の上側と駆動カム15とが連結された状態の操作部5と、分離状態の操作ロッド21の下側が設けられたスイッチ部7とを個別に製作し、操作ロッド21の連結用係合部23を係合して操作ロッド21を連結することにより操作部5とスイッチ部7とを組合わせて容易にスイッチ本体1を組立てることができる。また、スイッチ部7に交換すべき不具合が生じた場合であっても、スイッチ部7のみを交換するだけで容易にスイッチ本体1を復元することができる。
【0052】
次に、スイッチ部7について説明する。図1に示すように、ケース部材11と結合可能に形成されたケース部材33が、ケース部材11と結合されることにより一体となって直方体状のスイッチ本体1を形成する。そして、スイッチ部7は操作部5の下方に配設される。また、スイッチ部7は、第1開閉器39が内蔵された開閉器部70と、上記した操作ロッド21とを備えている。また、例えばアクチュエータ進入口9aからのアクチュエータ3の進入方向へのねじが、ケース部材11の周壁に形成された挿通孔を介してケース部材33のめねじ孔に螺合したり、ケース部材11を係止爪とその被係止部とからなる係止構造によってケース部材33に係止したりして、ケース部材33に、操作部5側のケース部材11が取付けられている。
【0053】
ところで、開閉器部70は、操作ロッド21の往復移動に連動して開閉する第1開閉器39を備えている。第1開閉器39は、可動接点39aと固定接点39bとからなり、可動接点39aは操作ロッド21と一体的に移動可能に下向きに操作ロッド21に固定され、固定接点39bは開閉器部70に配設された枠部材43に上向きに固定されている。ここで、第1開閉器39は産業機械への電源供給および遮断用であり、第1開閉器39が閉状態となることで、産業機械へ電源が供給される。
【0054】
また、図1に示すように、操作ロッド21の下端と枠部材43との間に、コイルばね50が取付けられ、これにより操作ロッド21が上方、すなわち操作部5の方向に付勢されている。したがって、コイルばね50は操作ロッド21を上方に付勢することにより、第1開閉器39の可動接点39aを固定接点39bに対して開離する方向(開方向)に付勢している。このように、この実施形態ではコイルばね50が本発明の「付勢手段」として機能している。
【0055】
ここで、ケース部材33には、産業機械と電気的に接続されるケーブル(図示省略)が装着されており、開閉器部70の内部においてケーブルと第1開閉器39とが電気的に接続されている。そして、第1開閉器39が開閉することによる電気信号によって、産業機械への電源供給及び電源供給の遮断が行われるようになっている。
【0056】
なお、アクチュエータ3が操作部5に挿入されていない図1の状態では、カムピン22がガイド孔15dに沿って径大部から径小部へ移動しており、操作ロッド21はコイルばね50の付勢力により操作部5側へ移動した状態となっている。この操作ロッド21の操作部5側への移動により可動接点39aも同時に固定接点39bから開離する方向へ移動し、第1開閉器39の可動接点39aおよび固定接点39bが開離し、第1開閉器39が開状態となり、産業機械への電源供給が遮断されて産業機械が操作不能な状態となっている。
【0057】
続いて、上記のように構成されたスイッチ本体1の動作について図1および図2を参照して説明する。図1に示すように、アクチュエータ3がスイッチ本体1の操作部5に挿入されていない場合、操作ロッド21はコイルばね50の付勢力により操作部5側に移動した状態にあり、第1開閉器39は開状態となっており、産業機械への電源供給が遮断されて産業機械が操作不能な状態となっている。
【0058】
次に、図1に示す初期状態から防護扉等を閉じるなどのアクチュエータ3の挿入操作により、例えばアクチュエータ進入口9aからアクチュエータ3が操作部5に挿入されると、図2に示すように、アクチュエータ3の連結片3bが駆動カム15の係合部15aと係合して、アクチュエータ3が進入するに連れて駆動カム15が反時計方向に回転する。駆動カム15が回転するのに伴い、カムピン22がコイルばね50の付勢力に抗しつつガイド孔15dに沿って下動する。
【0059】
そして、カムピン22の下動に伴って、操作ロッド21がコイルばね50の付勢力に抗してスイッチ部7に押込まれて下方に移動する。さらに、操作ロッド21が下方に移動するに連れて、可動接点39aが可動して固定接点39bに接触して第1開閉器39が開状態から閉状態となる。したがって、第1開閉器39が閉状態となるため、この第1開閉器39に直列に接続されているロボット等の産業機械に電源が供給され、産業機械が操作可能な状態となる。
【0060】
一方、防護扉等が開放されるなどのアクチュエータ3の引抜操作により、図1に示すように進入状態のアクチュエータ3が引抜かれると、アクチュエータ3の連結片3bと駆動カム15の係合部15aとの係合状態が解除されるまで駆動カム15がアクチュエータ3の引抜き方向に回転する。この駆動カム15の回転に伴ってカムピン22がガイド孔15dに沿って径大部から径小部へ移動して上動し、このカムピン22の上動に伴い、操作ロッド21がスイッチ部7から引抜かれる方向に移動する。
【0061】
そして、コイルばね50の付勢力と、駆動カム15が回転することによる操作ロッド21をスイッチ部7から引抜く引抜力とにより、操作ロッド21はアクチュエータ3の挿入操作時とは逆方向、すなわち、スイッチ部7から引抜かれて操作部5側へ移動し、可動接点39aは固定接点39bから開離して第1開閉器39が開状態になり、産業機械は操作不能な状態となる。
【0062】
ところで、図1および図2に示すスイッチ本体1では、アクチュエータ3の操作部5からの引抜操作の操作力がスイッチ本体1の破壊を招かない許容値である設計上の強度を超えた場合に、操作ロッド21が途中で折れるなどして破損したり、操作部5が破損したり脱落するおそれがある。また、運搬中の荷物がスイッチ本体1にぶつかったりして、スイッチ本体1に何らかの外力が加わった場合や、防護扉の閉塞操作の際に、アクチュエータ3がアクチュエータ進入口9a,9bから操作部5へ上手く進入することができず、アクチュエータ3が操作部5に当たることによる衝撃などにより、スイッチ本体1が損傷するおそれがある。
【0063】
また、アクチュエータ3の操作部5からの引抜操作の操作回数がスイッチ本体1の破壊を招かない許容値である設計上の耐久度を超えた場合に、繰返し生じる摩擦力により、操作ロッド21が途中で曲がったり折れるなどして破損したり、操作部5の駆動カム15が破損したり、操作ロッド21および駆動カム15の連結部分や回転軸13が磨耗により破損するおそれがある。
【0064】
そこで、本実施形態におけるスイッチ本体1では、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体1の破壊を招かない許容値を超えるときに、破壊することにより少なくとも操作ロッド21のコイルばね50の付勢方向への移動を許容する構造を備えている。操作ロッド21のコイルばね50の付勢方向への移動が許容されて、操作ロッド21が操作部5側に移動すれば、上記したように、第1開閉器39の可動接点39aは固定接点39bに対して開離する方向に移動する。したがって、何らかの外的負荷が操作ロッド21に加わり、操作ロッド21が破損した場合や、何らかの外的負荷が操作部5に加わり、操作部5が破損したり脱落した場合であっても、コイルばね50の付勢力により可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。次に、図3および図4を参照して、操作ロッド21のコイルばね50の付勢方向への移動を許容する具体的な構造について説明する。
【0065】
(1)第1動作例
図3は上記した操作ロッド21のコイルばね50の付勢方向への移動を許容する構造が、回転軸13およびこのケース部材11の内面に設けられた回転軸13を支持する支持部(図示省略)に形成される例を示す図である。図3に示すように、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体1の破壊を招かない許容値を超えるときに、支持部による回転軸13の支持状態が解除されて駆動カム15が操作部5内を上方に移動することにより、操作ロッド21のコイルばね50の付勢方向への移動が許容されるように構成されている。具体的には、ケース部材11の周壁内面において回転軸13を支持する支持部を係止する部分の肉厚が、アクチュエータ進入口9a側において他よりも薄く形成されたり、回転軸13の一部に切込みが形成されたり、回転軸13の一部が細く形成されるなどして折れ易く加工されたりして、操作ロッド21の移動が許容されるようになっている。したがって、操作ロッド21がコイルばね50の付勢力により操作部5側に移動するため、可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。なお、図3中の点線で示す回転軸13は支持部により正常に支持されているときの回転軸13の設計上の通常位置を示している。
【0066】
なお、操作ロッド21のコイルばね50の付勢方向への移動を許容する構造として、回転軸13を支持する支持部を係止する部分の肉厚を薄く形成したり、回転軸13の一部に切込みを形成したり、回転軸13の一部を細く形成したりする構造を例にあげて説明したが、操作ロッド21の付勢方向への移動を許容する構造としてはこれらの例に限られるものではない。例えば、構造としては、単に回転軸13を支持部により支持するものであってもよい。要は、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体1の破壊を招かない許容値を超えるときに、確実に操作ロッド21のコイルばね50の付勢方向への移動を許容する構造であれば、どのような構造であってもよい。
【0067】
(2)第2動作例
図4は上記した操作ロッド21のコイルばね50の付勢方向への移動を許容する構造が、操作部5とスイッチ部7との結合部分に形成されている例を示す図である。図4に示すように、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体1の破壊を招かない許容値を超えるときに、操作部5とスイッチ部7との結合状態が解除されて操作部5とスイッチ部7とが分離することにより、操作ロッド21のコイルばね50の付勢方向への移動が許容されるように構成されている。具体的には、係止爪と被係止部とを備えた係止構造により、ケース部材11をケース部材33に結合するようにしておき、この係止構造が上記許容値を超えるアクチュエータ3の引抜操作により破壊して操作ロッド21の移動を許容するように、係止爪や被係止部の形状、強度を設定しておくのが望ましい。したがって、操作ロッド21がコイルばね50の付勢力により操作部5側に移動するため、可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。
【0068】
なお、操作ロッド21のコイルばね50の付勢方向への移動を許容する構造として、係止爪と被係止部とを備えた係止構造を例にあげて説明したが、操作ロッド21の付勢方向への移動を許容する構造としてはこれらの例に限られるものではない。例えば、構造としては、単にケース部材11とケース部材33とを結合するものであってもよい。要は、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体1の破壊を招かない許容値を超えるときに、確実に操作ロッド21のコイルばね50の付勢方向への移動を許容する構造であれば、どのような構造であってもよい。
【0069】
以上のように、この実施形態では、アクチュエータ3の操作部5からの引抜操作の操作力や操作回数が破壊を招かない許容値を超えることにより操作ロッド21が破損した場合や、操作部5が破損したり脱落した場合であっても、操作ロッド21のコイルばね50付勢方向への移動が許容されているため、コイルばね50の付勢力により操作ロッド21が確実に操作部5側へ移動するので、可動接点39aが固定接点39bから開離するように可動して第1開閉器39を確実に開状態とすることができ、安全性の向上を図ることができる。また、スイッチ本体1の異常時に、コイルばね50の付勢方向への操作ロッド21の移動が許容された時の操作ロッド21の移動を検出するために開閉器を別途設けたりしなくともよいため、簡易な構成で安全スイッチの小型化を図ることができる。
【0070】
また、アクチュエータ3の操作部5からの引抜操作の操作力や操作回数が破壊を招かない許容値を超えるときに、駆動カム15を操作部内に回転自在に支持する支持部や、操作部5とスイッチ部7との結合部分に形成された構造が作用して、操作ロッド21のコイルばね50の付勢方向への移動を許容するように、駆動カム15をスイッチ部7から離れる方向に移動させるため、確実に操作ロッド21がコイルばね50の付勢力により移動することができ、可動接点39aが固定接点39bから開離するように可動して第1開閉器39を確実に開状態とすることができる。
【0071】
また、操作ロッド21と可動接点39aとが一体的に移動するように構成しているため、コイルばね50のみで、操作ロッド21を付勢して移動することにより、可動接点39aを固定接点39bと開離する方向に確実に可動することができ、簡易な構成とすることができる。
【0072】
また、カムピン22により操作ロッド21が駆動カム15に連結されているため、アクチュエータ3の挿入操作、引抜操作に伴う駆動カム15の両方向への回転に応じて操作ロッド21を確実に往復運動させてスイッチ部7の第1開閉器39の開閉状態を切換えることできる。さらに、アクチュエータ3の操作部5からの引抜操作による駆動カム15の回転時に、カムピン22がガイド孔15dに沿って径大部から径小部へ移動することに伴う操作ロッド21をスイッチ部7から引抜く引抜力が、コイルばね50による付勢力に加えて操作ロッド21を確実に操作部5側へ移動させるため、例えば可動接点39aおよび固定接点39bに溶着が生じていても、可動接点39aを固定接点39bから強制的に開離することにより確実に可動して第1開閉器39を開状態とすることができ、安全スイッチの信頼性を向上することができる。
【0073】
また、図3および図4に示すように、アクチュエータ3の操作部5からの引抜操作の操作力や操作回数が破壊を招かない許容値を超えることにより操作ロッド21が破損した場合や、操作部5が破損したり脱落した場合などに、駆動カム15が移動する方向は、アクチュエータ3の引抜操作における操作力が働く方向によれば、第1開閉器39が開状態となる操作ロッド21の移動方向、すなわち、コイルばね50による操作ロッド21の付勢方向とほぼ同じ方向となる。したがって、アクチュエータ3の挿入操作、引抜操作という安全スイッチの通常の使用状態において、アクチュエータ3の操作部5からの引抜操作の操作力や操作回数が破壊を招かない許容値を超えたとしても、図3および図4に示す操作ロッド21のコイルばね50の付勢方向への移動を許容する構造がより確実に作用するため、安全スイッチの信頼性をさらに向上することができる。
【0074】
<第2実施形態>
本発明にかかる安全スイッチの第2実施形態について図5ないし図8を参照して説明する。この第2実施形態において、上記第1実施形態と相違する点は、操作ロッド210の上部にフランジ部210aが形成され、フランジ部210aとケース部材33との間に、コイルばね(本発明の「付勢手段」に相当)500が操作ロッド210に外嵌された状態で取り付けられ、これにより操作ロッド210が上方、すなわち操作部5側に付勢されている点である。そして、コイルばね500は、操作ロッド210を操作部5側へ付勢することにより、第1開閉器39の可動接点39aを固定接点39bに対して離間する方向(開方向)に付勢している。その他の構成および動作は上記第1実施形態と同様であるため、以下においては図1および図4も参照しつつ主として第1実施形態との相違点について詳述する。なお、第1実施形態と同一の構成および動作については、同一符号を引用してその構成および動作の説明を省略する。
【0075】
図5ないし図8はスイッチ本体1の正面から見た断面図であり、それぞれ異なる状態を示す図である。図5に示すように、アクチュエータ3がスイッチ本体1の操作部5に挿入されていない場合、操作ロッド210はコイルばね500の付勢力により操作部5側に移動した状態にあり、第1開閉器39は開状態となっており、産業機械への電源供給が遮断されて産業機械が操作不能な状態となっている。
【0076】
次に、図5に示す初期状態から防護扉等を閉じるなどのアクチュエータ3の挿入操作により、例えばアクチュエータ進入口9aからアクチュエータ3が操作部5に挿入されると、図6に示すように、アクチュエータ3の連結片3bが駆動カム15の係合部15aと係合して、アクチュエータ3が進入するに連れて駆動カム15が反時計方向に回転する。駆動カム15が回転するのに伴い、カムピン22がコイルばね500の付勢力に抗しつつガイド孔15dに沿って下動する。
【0077】
そして、カムピン22の下動に伴って、操作ロッド210がコイルばね500の付勢力に抗してスイッチ部7に押込まれて下方に移動する。さらに、操作ロッド210が下方に移動するに連れて、可動接点39aが可動して固定接点39bに接触して第1開閉器39が開状態から閉状態となる。したがって、第1開閉器39が閉状態となるため、この第1開閉器39に直列に接続されているロボット等の産業機械に電源が供給され、産業機械が操作可能な状態となる。
【0078】
一方、防護扉等が開放されるなどのアクチュエータ3の引抜操作により、図5に示すように進入状態のアクチュエータ3が引抜かれると、アクチュエータ3の連結片3bと駆動カム15の係合部15aとの係合状態が解除されるまで駆動カム15がアクチュエータ3の引抜き方向に回転する。この駆動カム15の回転に伴ってカムピン22がガイド孔15dに沿って径大部から径小部へ移動して上動し、このカムピン22の上動に伴い操作ロッド210がスイッチ部7から引抜かれる方向に移動する。
【0079】
そして、コイルばね500の付勢力と、駆動カム15が回転することによる操作ロッド210をスイッチ部7から引抜く引抜力により、操作ロッド210はアクチュエータ3の挿入操作時とは逆方向、すなわち、スイッチ部7から引抜かれて操作部5側へ移動し、可動接点39aは固定接点39bから開離して第1開閉器39が開状態になり、産業機械は操作不能な状態となる。
【0080】
本実施形態では、上記した第1実施形態と同様に、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体1の破壊を招かない許容値を超えるときに、少なくとも操作ロッド210のコイルばね500の付勢方向への移動を許容する構造を備えている。上記したように、操作ロッド210のコイルばね500の付勢方向への移動が許容されて操作ロッド210が操作部5側に移動すれば、第1開閉器39の可動接点39aは固定接点39bに対して開離する方向に移動する。したがって、何らかの外的負荷が操作ロッド210に加わり、操作ロッド210が破損した場合や、何らかの外的負荷が操作部5に加わり、操作部5が破損したり脱落した場合であっても、コイルばね500の付勢力により可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。次に、図7および図8を参照して、操作ロッド210のコイルばね500の付勢方向への移動を許容する具体的な構造について説明する。
【0081】
(3)第3動作例
図7は上記した操作ロッド210のコイルばね500の付勢方向への移動を許容する構造が、回転軸13およびこのケース部材11の内面に設けられた回転軸13を支持する支持部(図示省略)に形成されている例を示す図である。図7に示すように、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体1の破壊を招かない許容値を超えるときに、支持部による回転軸13の支持状態が解除されて駆動カム15が操作部5内を上方に移動することにより、操作ロッド210のコイルばね500の付勢方向への移動が許容されるように構成されている。具体的構成は、上記第1実施形態の第1動作例で説明したものと同様であるのが望ましい。したがって、操作ロッド210がコイルばね500の付勢力により操作部5側に移動するため、可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。なお、図7中の点線で示す回転軸13は支持部により正常に支持されているときの回転軸13の設計上の通常位置を示している。
【0082】
(4)第4動作例
図8は上記した操作ロッド210のコイルばね500の付勢方向への移動を許容する構造が、操作部5とスイッチ部7との結合部分に形成されている例を示す図である。図8に示すように、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体1の破壊を招かない許容値を超えるときに、操作部5とスイッチ部7との結合状態が解除されて操作部5とスイッチ部7とが分離することにより、操作ロッド210のコイルばね500の付勢方向への移動が許容されるように構成されている。具体的構成は、上記第1実施形態の第2動作例で説明したものと同様であるのが望ましい。したがって、操作ロッド210がコイルばね500の付勢力により操作部5側に移動するため、可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。
【0083】
以上のように、本実施形態では、上記第1実施形態と同様の効果を奏することができる。
【0084】
<第3実施形態>
本発明にかかる安全スイッチの第3実施形態について図9ないし図14を参照して説明する。この第3実施形態において、上記第1実施形態と相違する点は、操作部5に、駆動カム150に係止して駆動カム150の回転を阻止する係止部材61を有し、アクチュエータ3が操作部5へ挿入されているときに、係止部材61を駆動カム150に係止して駆動カム150の回転を阻止することにより、アクチュエータ3の引抜操作を阻止するロック機構60が設けられている点である。係止部材61はコ字状に形成されており、基部62と、基部62の先端寄りの両側を橋絡して一体形成された係止片63とから構成され、基部の屈曲部62aを揺動の中心として揺動自在に構成されている。そして、図10に示すように、本実施形態の駆動カム150には係止部15fが形成されており、アクチュエータ3が操作部5に挿入された状態で係止部材61が屈曲部62aを揺動の中心として駆動カム150側に揺動することで、係止片63が係止部15fに係止して、駆動カム150の回転を阻止するように構成されている。その他の構成および動作は上記第1実施形態と同様であるため、以下においては図1および図4も参照しつつ主として第1実施形態との相違点について詳述する。なお、第1実施形態と同一の構成および動作については、同一符号を引用してその構成および動作の説明を省略する。
【0085】
図9ないし図14はスイッチ本体1の正面から見た断面図であり、それぞれ異なる状態を示す図である。図9に示すように、アクチュエータ3がスイッチ本体1の操作部5に挿入されていない場合、操作ロッド21はコイルばね50の付勢力により操作部5側に移動した状態にあり、第1開閉器39は開状態となっており、産業機械への電源供給が遮断されて産業機械が操作不能な状態となっている。また、係止部材61は屈曲部62aを揺動の中心としてケース部材11側へ揺動している。
【0086】
次に、図9に示す初期状態から防護扉等を閉じるなどのアクチュエータ3の挿入操作により、例えばアクチュエータ進入口9aからアクチュエータ3が操作部5に挿入されると、図10に示すように、アクチュエータ3の連結片3bが駆動カム150の係合部15aと係合して、アクチュエータ3が進入するに連れて駆動カム150が反時計方向に回転する。駆動カム150が回転するのに伴い、カムピン22がコイルばね50の付勢力に抗しつつガイド孔15dに沿って下動する。
【0087】
そして、カムピン22の下動に伴って、操作ロッド21がコイルばね50の付勢力に抗してスイッチ部7に押込まれて下方に移動する。さらに、操作ロッド21が下方に移動するに連れて、可動接点39aが可動して固定接点39bに接触して第1開閉器39が開状態から閉状態となる。したがって、第1開閉器39が閉状態となるため、この第1開閉器39に直列に接続されているロボット等の産業機械に電源が供給され、産業機械が操作可能な状態となる。そして、アクチュエータ3が操作部5に挿入された状態で、係止部材61が屈曲部62aを揺動の中心として駆動カム150側へ揺動することにより、係止片63が係止部15fに係止して駆動カム150の回転が阻止されて、アクチュエータ3の操作部5からの引抜操作が阻止される。
【0088】
一方、ソレノイドなどを利用した周知のロック解除手段(図示省略)により、係止部材61を屈曲部62aを揺動の中心としてケース部材11側へ揺動して係止片63の係止部15fへの係止状態を解除した状態で、防護扉等が開放されるなどのアクチュエータ3の引抜操作が行われると、図9に示すように進入状態のアクチュエータ3が引抜かれて、アクチュエータ3の連結片3bと駆動カム150の係合部15aとの係合状態が解除されるまで駆動カム150がアクチュエータ3の引抜き方向に回転する。この駆動カム150の回転に伴ってカムピン22がガイド孔15dに沿って径大部から径小部へ移動して上動し、操作ロッド21がスイッチ部7から引抜かれる。
【0089】
そして、コイルばね50の付勢力と、駆動カム150が回転することによる操作ロッド21をスイッチ部7から引抜く引抜力により、操作ロッド21はアクチュエータ3の挿入操作時とは逆方向、すなわち、スイッチ部7から引抜かれて操作部5側へ移動し、可動接点39aは固定接点39bから開離して第1開閉器39が開状態になり、産業機械は操作不能な状態となる。
【0090】
本実施形態では、上記した第1実施形態と同様に、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体1の破壊を招かない許容値を超えるときに、少なくとも操作ロッド21のコイルばね50の付勢方向への移動を許容する構造を備えている。上記したように、操作ロッド21のコイルばね50の付勢方向への移動が許容されて操作ロッド21が操作部5側に移動すれば、第1開閉器39の可動接点39aは固定接点39bに対して開離する方向に移動する。したがって、上記した例に加え、防護扉の閉塞操作において、アクチュエータ3の操作部5への挿入と同時にロック機構60によりアクチュエータ3の操作部5からの引抜操作が阻止されたときに、防護扉の閉塞速度が速すぎることによる防護扉のはね返り力による引抜力がアクチュエータ3に加わるなど、何らかの外的負荷が操作ロッド21に加わり、操作ロッド21が破損した場合や、何らかの外的負荷が操作部5に加わり、操作部5が破損したり脱落した場合であっても、コイルばね50の付勢力により可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。次に、図11ないし図14を参照して、操作ロッド21のコイルばね50の付勢方向への移動を許容する具体的な構造について説明する。
【0091】
(5)第5動作例
図11は上記した操作ロッド21のコイルばね50の付勢方向への移動を許容する構造が、回転軸13およびこのケース部材11の内面に設けられた回転軸13を支持する支持部(図示省略)に形成されている例を示す図である。図11に示すように、ロック機構60によりアクチュエータ3の操作部5からの引抜操作が阻止された状態で、強引にアクチュエータ3の引抜操作が行われることにより、引抜操作の操作力がスイッチ本体1の破壊を招かない許容値を超えるときに、支持部による回転軸13の支持状態が解除されて駆動カム150が操作部5内を上方に移動することにより、操作ロッド21のコイルばね50の付勢方向への移動が許容されるように構成されている。具体的構成は、上記第1実施形態の第1動作例で説明したものと同様であるのが望ましい。したがって、操作ロッド21がコイルばね50の付勢力により操作部5側に移動するため、可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。なお、図11中の点線で示す回転軸13は支持部により正常に支持されているときの回転軸13の設計上の通常位置を示している。
【0092】
(6)第6動作例
図12は上記した操作ロッド21のコイルばね50の付勢方向への移動を許容する構造が、駆動カム150の回転を阻止するロック機構60に形成されている例である。図12に示すように、ロック機構60によりアクチュエータ3の操作部5からの引抜操作が阻止された状態で、強引にアクチュエータ3の引抜操作が行われることにより、引抜操作の操作力がスイッチ本体1の破壊を招かない許容値を超えるときに、係止部材61が破損することによりロック機構60による駆動カム150の回転の阻止状態が解除されて駆動カム150が時計回りに回転することにより、操作ロッド21のコイルばね50の付勢方向への移動が許容されるように構成されている。具体的には、係止部材61の一部に切込みが形成されるなどして折れ易く加工されたりして、操作ロッド21の移動が許容されるようになっていることが望ましい。したがって、操作ロッド21がコイルばね50の付勢力により操作部5側に移動するため、可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。
【0093】
(7)第7動作例
図13は上記した操作ロッド21のコイルばね50の付勢方向への移動を許容する構造が、駆動カム150に形成されている例である。図13に示すように、ロック機構60によりアクチュエータ3の操作部5からの引抜操作が阻止された状態で、強引にアクチュエータ3の引抜操作が行われることにより、引抜操作の操作力がスイッチ本体1の破壊を招かない許容値を超えるときに、駆動カム150が破損することにより駆動カム150により操作ロッド21のスイッチ7側への押込み状態が解除されて、操作ロッド21のコイルばね50の付勢方向への移動が許容されるように構成されている。具体的には、駆動カム150の一部に切込みが形成されるなどして折れ易く加工されたりして、操作ロッド21の移動が許容されるようになっていることが望ましい。したがって、操作ロッド21がコイルばね50の付勢力により操作部5側に移動するため、可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。
【0094】
(8)第8動作例
図14は上記した操作ロッド21のコイルばね50の付勢方向への移動を許容する構造が、操作部5とスイッチ部7との結合部分に形成されている例を示す図である。図14に示すように、ロック機構60によりアクチュエータ3の操作部5からの引抜操作が阻止された状態で、強引にアクチュエータ3の引抜操作が行われることにより、引抜操作の操作力がスイッチ本体1の破壊を招かない許容値を超えるときに、操作部5とスイッチ部7との結合状態が解除されて操作部5とスイッチ部7とが分離することにより、操作ロッド21のコイルばね50の付勢方向への移動が許容されるように構成されている。具体的構成は、上記第1実施形態の第2動作例で説明したものと同様であるのが望ましい。したがって、操作ロッド21がコイルばね50の付勢力により操作部5側に移動するため、可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。
【0095】
以上のように、本実施形態では、上記第1実施形態と同様の効果を奏することができるとともに以下の効果を奏することができる。すなわち、ロック機構60が駆動カム150の回転を阻止することによりアクチュエータ3の操作部5からの引抜操作を阻止することができる。このとき、強引にアクチュエータ3の引抜操作が行われて、アクチュエータ3の操作部5からの引抜操作の操作力がスイッチ本体1の破壊を招かない許容値を超えることにより操作部5が破損したり脱落した場合であっても、操作ロッド21のコイルばね50の付勢方向への移動が許容されているため、操作ロッド21がコイルばね50の付勢力により確実に操作部5側に移動するので、可動接点39aが固定接点39bから開離するように可動して第1開閉器39を確実に開状態とすることができる。
【0096】
<第4実施形態>
本発明にかかる安全スイッチの第4実施形態について図15ないし図21を参照して説明する。この第4実施形態において、上記第3実施形態と相違する点は、ロック機構(本発明の「ロック手段」に相当)460による駆動カム415の回転阻止状態と回転許容状態との間の切換えに応じて開閉状態が切換わる第2開閉器40をさらに備えている点である。また、本実施形態では、ロック機構460はケース部材433内であって操作部405の右方に設けられている。そして、先端462が出退自在に操作部405内に突出するように設けられた係止部材461が、駆動カム415に形成された係止部415fに係止することにより、ロック機構460は駆動カム415の回転を阻止するように構成されている。このロック機構460の構成については後で詳細に説明する。その他の構成および動作は上記第3実施形態と同様であるため、以下においては図9ないし図14も参照しつつ主として第3実施形態との相違点について詳述する。なお、第3実施形態と同一の構成および動作については、同一および相当符号を引用してその構成および動作の詳細な説明を省略する。
【0097】
図15ないし図21はスイッチ本体400の正面から見た断面図であり、それぞれ異なる状態を示す図である。本実施形態における安全スイッチは、上記した安全スイッチと同様に、外部装置であるロボット等の産業機械等にケーブルを介して電気的に接続されるスイッチであり、スイッチ本体400と、アクチュエータ3とにより構成される。
【0098】
このとき、スイッチ本体400は、操作部405とスイッチ部407とからなり、図示を省略する産業機械の防護扉周縁の壁面に固着される。また、アクチュエータ3は防護扉に固着され、その位置は操作部405の上面に形成されたアクチュエータ進入口409に対向する位置であり、アクチュエータ3の挿入操作に相当する防護扉の閉鎖によりアクチュエータ3は操作部405のアクチュエータ進入口409内に挿入される。なお、アクチュエータ3は、コ字状の基部3aと、該基部3aの先端寄りの両側を橋絡して一体形成された連結片3bとから構成されている。
【0099】
スイッチ本体400の左上部に配設された操作部405は、図15ないし図17に示すように、ケース部材411と、回転軸413がこのケース部材411の内面に支持されて、アクチュエータ3の操作部405への挿入操作、操作部405からの引抜操作に応じて両方向に回転するように回転自在に設けられた駆動カム415とを備えている。この駆動カム415の上部外周面には、アクチュエータ3の連結片3bが嵌挿する係合部415aが、上記したアクチュエータ進入口409から覗く位置に形成されている。
【0100】
また、駆動カム415の下部外周面にはカム曲線部415cが形成されており、側面には径大部と径小部とを有するカム曲線状のガイド孔415d(本発明の「ガイド部」に相当)が形成されている。また、駆動カム415のガイド孔415dが形成されている部分には、外周面から回転軸413にかけて切込415eが形成されており、後述する操作ロッド21の先端が駆動カム415の切込415e部分に挿入された状態で配設される。なお、図15に示す駆動カム415は、切込415e部分の断面を示した部分断面図であり、以下の説明で参照する図面で示す駆動カム415は、同様に全て部分断面図であり、その説明は省略する。
【0101】
また、操作部405の下方に位置するスイッチ部407から先端部分が出退自在に操作部405内に突出する操作ロッド21が設けられ、その先端部にはカムピン22が直交して固着されている。そして、操作ロッド21が駆動カム415の回転に連動して往復移動するようにカムピン22の両端部がそれぞれ駆動カム415のガイド孔415dに挿通されている。そして、駆動カム415の回転に伴ってカムピン22がガイド孔415dに沿って移動することで、操作ロッド21が操作部405に進入、後退して往復移動し、スイッチ部407に内蔵されている開閉器部70の第1開閉器39の開閉状態が切換えられる。
【0102】
また、操作ロッド21には連結用係合部23が形成されており、この連結用係合部23により操作ロッド21は上側(操作部405側)と下側(スイッチ部407側)とで係脱自在に分離可能に構成されている。したがって、分離状態の操作ロッド21の上側と駆動カム415とが連結された状態の操作部405と、分離状態の操作ロッド21の下側が設けられたスイッチ部407とを個別に製作し、操作ロッド21の連結用係合部23を係合して操作ロッド21を連結することにより操作部405とスイッチ部407とを組合わせて容易にスイッチ本体400を組立てることができる。また、スイッチ部407に交換すべき不具合が生じた場合であっても、スイッチ部407のみを交換するだけで容易にスイッチ本体400を復元することができる。
【0103】
次に、スイッチ部407について説明する。図15に示すように、ケース部材411と結合可能に形成されたケース部材433が、ケース部材411と結合されることにより一体となって直方体状のスイッチ本体400を形成する。また、スイッチ部407は、第1開閉器39が内蔵された開閉器部70と、上記した操作ロッド21と、ロック機構460とを備えている。また、例えばアクチュエータ進入口409からのアクチュエータ3の進入方向へのねじが、ケース部材411の周壁に形成された挿通孔を介してケース部材433のめねじ孔に螺合したり、ケース部材411を係止爪とその被係止部とからなる係止構造によってケース部材433に係止したりして、ケース部材433に、ケース部材411が取付けられている。
【0104】
ところで、開閉器部70は、操作ロッド21の往復移動に連動して開閉する第1開閉器39を備えている。第1開閉器39は、可動接点39aと固定接点39bとからなり、可動接点39aは操作ロッド21と一体的に移動可能に下向きに操作ロッド21に固定され、固定接点39bは開閉器部70に配設された枠部材43に上向きに固定されている。ここで、第1開閉器39は産業機械への電源供給および遮断用であり、第1開閉器39が閉状態となることで、産業機械へ電源が供給される。
【0105】
また、図15に示すように、操作ロッド21の下端と枠部材43との間に、コイルばね50が取付けられ、これにより操作ロッド21が上方、すなわち操作部405の方向に付勢されている。したがって、コイルばね50は操作ロッド21を上方に付勢することにより、第1開閉器39の可動接点39aを固定接点39bに対して開離する方向(開方向)に付勢している。
【0106】
ここで、ケース部材433には、産業機械と電気的に接続されるケーブル(図示省略)が装着されており、開閉器部70の内部においてケーブルと第1開閉器39とが電気的に接続されている。そして、第1開閉器39が開閉することによる電気信号によって、産業機械への電源供給及び電源供給の遮断が行われるようになっている。
【0107】
なお、アクチュエータ3が操作部405に挿入されていない図15の状態では、カムピン22がガイド孔415dに沿って径大部から径小部へ移動しており、操作ロッド21はコイルばね50の付勢力により操作部405側へ移動した状態となっている。この操作ロッド21の操作部405側への移動により可動接点39aも同時に固定接点39bから開離する方向へ移動し、第1開閉器39の可動接点39aおよび固定接点39bが開離し、第1開閉器39が開状態となり、産業機械への電源供給が遮断されて産業機械が操作不能な状態となっている。
【0108】
次に、ロック機構460について説明する。このロック機構460は、図15に示すように、ケース部材433の内部であって操作部405の右方に配設され、上記した係止部材461と、係止部材461を移動させるコイルばね463およびソレノイドなどを利用した周知の駆動部(図示省略)と、第2開閉器40とを備えている。
【0109】
ロック機構460の係止部材461は、図15に示す回転許容位置と、図16に示す回転阻止位置との間を、駆動カム415の回転軸413に対してほぼ直交方向に移動自在に設けられている。そして、図16に示すように、係止部材461が回転阻止位置に移動したときに、先端462が駆動カム415に形成された係止部415fに係止することによって、ロック機構460は駆動カム415の回転を阻止して回転阻止状態とする。一方、係止部材461が、図15および図17に示す回転許容位置に移動したときに、先端462と係止部415fとの係止状態が解除され、駆動カム415が回転可能な回転許容状態となる。
【0110】
また、係止部材461は、コイルばね463により左方の回転阻止位置に付勢されている。一方、ソレノイドなどを利用した駆動部が通電されることにより、係止部材461はコイルばね463の付勢力に抗して右方の回転許容位置に移動される。
【0111】
すなわち、図16に示すように、駆動部が通電遮断されていれば、係止部材461はコイルばね463により左方に付勢されて回転阻止位置に移動して、駆動カム415の回転を阻止し、回転阻止状態とする。一方、駆動部が通電されれば、図17に示すように、係止部材461はコイルばね463の付勢力に抗しつつ右方の回転許容位置に移動して、駆動カム415の回転を許容し、回転許容状態とする。
【0112】
したがって、図16に示すように、アクチュエータ3が操作部405に挿入された状態で係止部材461がコイルばね463の付勢力により左方に移動することで、先端462が係止部415fに係止して、駆動カム415が回転阻止状態となることで、アクチュエータ3の引抜操作が阻止される。一方、図17に示すように、アクチュエータ3が操作部405に挿入された状態で駆動部が通電されることにより係止部材461がコイルばね463の付勢力に抗して右方に移動することで、先端462と係止部415fとの係止状態が解除されて駆動カム415の回転が許容され、アクチュエータ3の引抜操作が可能となる。
【0113】
また、第2開閉器40は、可動接点40aと固定接点40bとからなり、可動接点40aは係止部材461と一体的に移動可能に左向きに係止部材461に固定され、固定接点40bはケース部材433に配設された枠部材(図示省略)に右向きに固定されている。したがって、可動接点40aは係止部材461に連動して同じ方向に移動することとなり、係止部材461が左方に移動した場合、すなわち、係止部材461が回転阻止位置に移動した場合、第2開閉器40は閉状態となり、係止部材461が右方へ移動した場合、すなわち、係止部材461が回転許容位置に移動した場合、第2開閉器40は開状態となる。また、この第2開閉器40の電気信号をモニタすることによって、係止部材461の動作を検出することができる。
【0114】
続いて、上記のように構成されたスイッチ本体400の動作について図15ないし図17を参照して説明する。図15に示すように、アクチュエータ3がスイッチ本体400の操作部405に挿入されていない場合、操作ロッド21はコイルばね50の付勢力により操作部405側に移動した状態にあり、第1開閉器39は開状態となっており、産業機械への電源供給が遮断されて産業機械が操作不能な状態となっている。また、係止部材461は、先端462が駆動カム415の周面によりケース部材433側に押圧されて回転許容位置に移動しており、第2開閉器40は開状態となっている。
【0115】
次に、図15に示す初期状態から防護扉等を閉じるなどのアクチュエータ3の挿入操作により、アクチュエータ進入口409からアクチュエータ3が操作部405に挿入されると、図16に示すように、アクチュエータ3の連結片3bが駆動カム415の係合部415aと係合して、アクチュエータ3が進入するに連れて駆動カム415が反時計方向に回転する。駆動カム415が回転するのに伴い、カムピン22がコイルばね50の付勢力に抗しつつガイド孔415dに沿って下動する。
【0116】
そして、カムピン22の下動に伴って、操作ロッド21がコイルばね50の付勢力に抗してスイッチ部407に押込まれて下方に移動する。さらに、操作ロッド21が下方に移動するに連れて、可動接点39aが可動して固定接点39bに接触して第1開閉器39が開状態から閉状態となる。したがって、第1開閉器39が閉状態となるため、この第1開閉器39に直列に接続されているロボット等の産業機械に電源が供給され、産業機械が操作可能な状態となる。
【0117】
また、アクチュエータ3が操作部405に挿入された状態で、係止部材461がコイルばね463の付勢力により左方の回転阻止位置に移動して、先端462が係止部415fに係止して駆動カム415の回転が阻止されて回転阻止状態となり、アクチュエータ3の操作部405からの引抜操作が阻止される。このとき、係止部材461の左方への移動に連動して可動接点40aが左方に移動して固定接点40bに接触し、第2開閉器40が開状態から閉状態となる。
【0118】
一方、図17に示すように、ソレノイドなどを利用した周知の駆動部が通電されることにより、係止部材461がコイルばね463の付勢力に抗して右方の回転許容位置に移動されると、駆動カム415が回転許容状態となると共に、係止部材461の右方への移動に連動して可動接点40aが右方へ移動して固定接点40bから開離し、第2開閉器40が閉状態から開状態となる。この駆動カム415の回転許容状態において、防護扉等が開放されるなどのアクチュエータ3の引抜操作が行われると、図15に示すように進入状態のアクチュエータ3が引抜かれて、アクチュエータ3の連結片3bと駆動カム415の係合部415aとの係合状態が解除されるまで駆動カム415がアクチュエータ3の引抜き方向に回転する。この駆動カム415の回転に伴ってカムピン22がガイド孔415dに沿って径大部から径小部へ移動して上動し、操作ロッド21がスイッチ部407から引抜かれる。
【0119】
そして、コイルばね50の付勢力と、駆動カム415が回転することによる操作ロッド21をスイッチ部407から引抜く引抜力により、操作ロッド21はアクチュエータ3の挿入操作時とは逆方向、すなわち、スイッチ部407から引抜かれて操作部405側へ移動し、可動接点39aは固定接点39bから開離して第1開閉器39が開状態になり、産業機械は操作不能な状態となる。
【0120】
本実施形態では、上記した第3実施形態と同様に、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体400の破壊を招かない許容値を超えるときに、少なくとも操作ロッド21のコイルばね50の付勢方向への移動を許容する構造を備えている。上記したように、操作ロッド21のコイルばね50の付勢方向への移動が許容されて操作ロッド21が操作部405側に移動すれば、第1開閉器39の可動接点39aは固定接点39bに対して開離する方向に移動する。したがって、上記した例に加え、防護扉の閉塞操作において、アクチュエータ3の操作部405への挿入と同時にロック機構460によりアクチュエータ3の操作部405からの引抜操作が阻止されたときに、防護扉の閉塞速度が速すぎることによる防護扉のはね返り力による引抜力がアクチュエータ3に加わるなど、何らかの外的負荷が駆動カム415に加わり、それにより操作ロッド21が破損した場合や、何らかの外的負荷が操作部405に加わり、操作部405が破損したり脱落した場合であっても、コイルばね50の付勢力により可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。次に、図18ないし図21を参照して、操作ロッド21のコイルばね50の付勢方向への移動を許容する具体的な構造について説明する。
【0121】
(9)第9動作例
図18は上記した操作ロッド21のコイルばね50の付勢方向への移動を許容する構造が、回転軸413およびこのケース部材411の内面に設けられた回転軸413を支持する支持部(図示省略)に形成されている例を示す図である。図18に示すように、ロック機構460によりアクチュエータ3の操作部405からの引抜操作が阻止された状態で、強引にアクチュエータ3の引抜操作が行われることにより、引抜操作の操作力がスイッチ本体400の破壊を招かない許容値を超えるときに、支持部による回転軸413の支持状態が解除されて駆動カム415が操作部405内を上方に移動することにより、操作ロッド21のコイルばね50の付勢方向への移動が許容されるように構成されている。具体的構成は、上記第1実施形態の第1動作例で説明したものと同様であるのが望ましい。したがって、操作ロッド21がコイルばね50の付勢力により操作部405側に移動するため、可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。なお、図18中の点線で示す回転軸413は支持部により正常に支持されているときの回転軸413の設計上の通常位置を示している。
【0122】
また、このとき、係止部材461は左方の回転阻止位置へ移動したままであるため、第1開閉器39が閉状態から開状態となったにも関わらず、第2開閉器40は閉状態のままである。
【0123】
(10)第10動作例
図19は上記した操作ロッド21のコイルばね50の付勢方向への移動を許容する構造が、駆動カム415の回転を阻止するロック機構460に形成されている例である。図19に示すように、ロック機構460によりアクチュエータ3の操作部405からの引抜操作が阻止された状態で、強引にアクチュエータ3の引抜操作が行われることにより、引抜操作の操作力がスイッチ本体400の破壊を招かない許容値を超えるときに、係止部材461の先端462が破損することによりロック機構460による駆動カム415の回転阻止状態が解除されて駆動カム415が時計回りに回転することにより、操作ロッド21のコイルばね50の付勢方向への移動が許容されるように構成されている。具体的には、係止部材461の先端462の一部に切込みが形成されるなどして折れ易く加工されたりして、操作ロッド21の移動が許容されるようになっていることが望ましい。したがって、操作ロッド21がコイルばね50の付勢力により操作部405側に移動するため、可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。
【0124】
また、このとき、係止部材461は左方の回転阻止位置へ移動したままであるため、第1開閉器39が閉状態から開状態となったにも関わらず、第2開閉器40は閉状態のままである。
【0125】
(11)第11動作例
図20は上記した操作ロッド21のコイルばね50の付勢方向への移動を許容する構造が、駆動カム415に形成されている例である。図20に示すように、ロック機構460によりアクチュエータ3の操作部405からの引抜操作が阻止された状態で、強引にアクチュエータ3の引抜操作が行われることにより、引抜操作の操作力がスイッチ本体400の破壊を招かない許容値を超えるときに、駆動カム415が破損することにより駆動カム415による操作ロッド21のスイッチ407側への押込み状態が解除されて、操作ロッド21のコイルばね50の付勢方向への移動が許容されるように構成されている。具体的には、駆動カム415の一部に切込みが形成されるなどして折れ易く加工されたりして、操作ロッド21の移動が許容されるようになっていることが望ましい。したがって、操作ロッド21がコイルばね50の付勢力により操作部405側に移動するため、可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。
【0126】
また、このとき、係止部材461は左方の回転阻止位置へ移動したままであるため、第1開閉器39が閉状態から開状態となったにも関わらず、第2開閉器40は閉状態のままである。
【0127】
(12)第12動作例
図21は上記した操作ロッド21のコイルばね50の付勢方向への移動を許容する構造が、操作部405とスイッチ部407との結合部分に形成されている例を示す図である。図21に示すように、ロック機構460によりアクチュエータ3の操作部405からの引抜操作が阻止された状態で、強引にアクチュエータ3の引抜操作が行われることにより、引抜操作の操作力がスイッチ本体400の破壊を招かない許容値を超えるときに、操作部405とスイッチ部407との結合状態が解除されて操作部405とスイッチ部407とが分離することにより、操作ロッド21のコイルばね50の付勢方向への移動が許容されるように構成されている。具体的構成は、上記第1実施形態の第2動作例で説明したものと同様であるのが望ましい。したがって、操作ロッド21がコイルばね50の付勢力により操作部405側に移動するため、可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。
【0128】
また、このとき、係止部材461は左方の回転阻止位置へ移動したままであるため、第1開閉器39が閉状態から開状態となったにも関わらず、第2開閉器40は閉状態のままである。
【0129】
以上のように、本実施形態では、上記第3実施形態と同様の効果を奏することができるとともに以下の効果を奏することができる。すなわち、ロック機構460による駆動カム415の回転阻止状態のときに、強引にアクチュエータ3の引抜操作が行われるなどしても、操作ロッド21のコイルばね50の付勢方向への移動を許容する構造が破壊すれば、操作ロッド21がコイルばね50の付勢力により移動して、可動接点39aが固定接点39bから開離するように可動して第1開閉器39が開状態となるが、ロック機構460による駆動カム415の回転阻止状態は回転解除状態に切換わらないため、第2開閉器40の開閉状態は切換わらない。したがって、第2開閉器40の開閉状態が切換わらないのに、第1開閉器39の開閉状態のみが切換わることで、安全スイッチに何らかの異常が発生したことを確実に検出することができる。
【0130】
<構造の変形例>
次に、本発明の構造の変形例について図22ないし図24を参照して説明する。なお、以下においては上記した実施形態と同一の構成および動作については、同一および相当符号を引用してその構成および動作の詳細な説明を省略する。
【0131】
(a)第1変形例
図22はこの発明の構造の変形例を示す図であって、(a)は破壊する前の構造の側面から見た要部拡大図、(b)は破壊した後の構造の側面から見た要部拡大図である。図22(a)に示すように、上記した実施形態と同様に、回転軸513がこのケース部材(図示省略)の内面に支持されて、アクチュエータ3の操作部(図示省略)への挿入操作、操作部からの引抜操作に応じて両方向に回転するように駆動カム515が回転自在に操作部に設けられている。
【0132】
そして、図22(b)に示すように、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体(図示省略)の破壊を招かない許容値を超えるときに、回転軸513が屈曲することで駆動カム515がスイッチ部(図示省略)に対して上方に移動して、操作ロッド21のコイルばね50の付勢方向への移動が許容される。また、回転軸513は、一度、屈曲することにより破壊すれば、屈曲状態を維持するように構成されている。したがって、回転軸513が破壊すれば、駆動カム515が設計上の所定の位置からスイッチ部に対して上方に移動した状態が維持されるため、この状態でアクチュエータ3を挿入しても駆動カム515は正常に作動せず操作ロッド21の移動による可動接点39aの固定接点39bへの接触が阻止される。
【0133】
以上のように、この第1変形例では、回転軸513が、本発明の「可動接点の固定接点への接触を阻止する手段」として構成されている。
【0134】
(b)第2変形例
図23はこの発明の構造の変形例を示す図であって、(a)は破壊する前の構造の正面から見た要部拡大図、(b)は破壊した後の構造の正面から見た要部拡大図である。図23(a)に示すように、上記した実施形態と同様に、ケース部材611の内面に設けられた支持溝611aの2箇所に形成された支持突起611bに回転軸613が支持されて、アクチュエータ3の操作部(図示省略)への挿入操作、操作部からの引抜操作に応じて両方向に回転するように駆動カム615が回転自在に操作部に設けられている。
【0135】
また、支持溝611aの2箇所に形成された支持突起611bのそれぞれに対応して、ケース部材611には弾性変形可能に孔611cが形成されている。そして、図23(b)に示すように、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体(図示省略)の破壊を招かない許容値を超えるときに、ケース部材611に形成された孔611cが弾性変形または塑性変形することにより支持突起611bがそれぞれ外側に移動して、支持突起611bによる回転軸613の支持状態が解除される。これにより、駆動カム615がスイッチ部(図示省略)に対して上方に移動して、操作ロッド21のコイルばね50の付勢方向への移動が許容される。
【0136】
また、駆動カム615の上方への移動後に支持突起611bが元の位置に復帰することにより、元の位置に復帰した支持突起611bにより回転軸613は下方から支持される。したがって、回転軸613が一度上方に移動すれば、駆動カム615が設計上の所定の位置からスイッチ部に対して上方に移動した状態が維持されるため、この状態でアクチュエータ3を挿入しても駆動カム615は正常に作動せず操作ロッド21の移動による可動接点39aの固定接点39bへの接触が阻止される。
【0137】
以上のように、この第2変形例では、支持溝611a、支持突起611bおよび孔611cが本発明の「可動接点の固定接点への接触を阻止する手段」として構成されている。
【0138】
(c)第3変形例
図24はこの発明の構造の変形例を示す図であって、(a)は破壊する前の構造の正面から見た要部拡大図、(b)は破壊した後の構造の正面から見た要部拡大図である。図24(a)に示すように、上記した実施形態と同様に、ケース部材(図示省略)の内面に設けられた支持部に回転軸713が支持されて、アクチュエータ3の操作部(図示省略)への挿入操作、操作部からの引抜操作に応じて両方向に回転するように駆動カム715が回転自在に操作部に設けられている。
【0139】
また、この変形例では、駆動カム715には、回転軸713が挿通可能な大きさの上下に並んで設けられた2つの孔を連通して形成された支持孔715gが形成されいる。また、支持孔715gの、上側の孔と下側の孔との境界に橋絡片715hが駆動カム715と一体的に設けられており、これにより、上側の孔に回転軸713が支持されている。
【0140】
そして、図24(b)に示すように、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体(図示省略)の破壊を招かない許容値を超えるときに、駆動カム715の支持孔715gに設けられた橋絡片715hが破壊することにより、駆動カム715がスイッチ部(図示省略)に対して上方に移動して、操作ロッド21のコイルばね50の付勢方向への移動が許容される。また、駆動カム715がスイッチ部に対して移動した後は、回転軸713が支持孔715gの下側の孔により支持されると共に、この回転軸713の支持状態が維持されるように支持孔715gの大きさが形成されている。したがって、駆動カム715が一度上方に移動すれば、駆動カム715が設計上の所定の位置からスイッチ部に対して上方に移動した状態が維持されるため、この状態でアクチュエータ3を挿入しても駆動カム715は正常に作動せず操作ロッド21の移動による可動接点39aの固定接点39bへの接触が阻止される。
【0141】
以上のように、この第3変形例では、支持孔715gおよび橋絡片715hが本発明の「可動接点の固定接点への接触を阻止する手段」として構成されている。
【0142】
以上のように、第1ないし第3変形例によれば、操作ロッド21のコイルばね50の付勢方向への移動を許容する構造が破壊したときに、アクチュエータ3の挿入操作による駆動カム515,615,715の作動時の操作ロッド21の移動による可動接点39aの固定接点39bへの接触が阻止される。したがって、安全スイッチに何らかの異常が発生しているにも関わらず、アクチュエータ3の挿入操作が行われたときに第1開閉器39が閉状態に切換わるのを確実に防止できる。
【0143】
なお、第1ないし第3変形例における構造を上記した実施形態に適用してもよい。また、上記した実施形態において説明した構造を、第1ないし第3変形例における構造のように、破壊したときに、アクチュエータ3の挿入操作に連動した操作ロッド21の移動による可動接点39aの固定接点39bへの接触を阻止する構造としてもよい。
【0144】
<その他>
なお、本発明は上記実施形態に限定されるものではなく、その趣旨を逸脱しない限りにおいて上述したものに対して種々の変更を加えることが可能である。例えば、アクチュエータ3の付勢手段による付勢方向への移動を許容する構造としては、上記した例に限られず、操作ロッド21,210などの部品の一部に切込を形成したり、スイッチ本体1を構成するの部品の材質、大きさ、厚さ、太さなどを一部変更したりするなどして、操作ロッド21,210、駆動カム15,150,415,515,615,715、操作ロッド21,210と駆動カム15,150,415,515,615,715とを連結するカムピン22、その他の部品などの破壊強度を適切に設定することにより、これらの構造を、アクチュエータ3の付勢手段による付勢方向への移動を許容する構造としてもよい。
【0145】
また、上記実施形態では、コイルばね50,500が本発明の「付勢手段」として機能しているが、付勢手段の構成としては上記した構成に限定されない。要は、確実に可動接点39aを固定接点39bに対して開離する方向に付勢することのできる構成であればどのような構成であってもよい。例えば、磁石などを本発明の「付勢手段」として採用してもよい。
【0146】
また、上記した第1ないし第4実施形態では、1つの第1開閉器39を備える安全スイッチを例に挙げて説明したが、開閉器の数としてはこれに限定されるものではなく、2個以上設けてもよい。また、上記した第1ないし第3実施形態では、可動接点39aを固定接点39bに対して開離する方向へ付勢する付勢手段を有する第1開閉器39を備えた安全スイッチを例に挙げて説明したが、このような第1開閉器39に加えて、可動接点を固定接点に対して閉塞する方向へ付勢する付勢手段を有するとともに第1開閉器39と逆の開閉動作を行う第1開閉器を備える構成でもよい。この場合、第1開閉器39を外部装置の動作制御に使用して、新たな開閉器をアクチュエータの進入を検出するための電気信号を得るための開閉器とすればよい。
【0147】
このような構成とすれば、アクチュエータ3の操作部5への挿入操作に伴い第1開閉器39が閉状態となって、外部装置が操作不能状態から操作可能状態となる一方、新たな開閉器はアクチュエータ3の挿入操作に伴って開状態となる。このように、第1開閉器39と逆の開閉動作を行う開閉器の開閉状態をモニタすることにより、アクチュエータ3の挿入操作、引抜操作に加えて、外部装置の状態を外部から確認することができる。
【0148】
また、上記実施形態では、操作ロッド21,210のカムピン22がガイド孔15dを移動することで操作ロッド21,210が往復移動するように構成したが、連結手段を設けずに、操作ロッド21,210の先端部がカム曲線部15cに摺接することで操作ロッド21,210が往復移動する構成としてもよい。また、連結手段の構成としては上記した構成に限られず、操作ロッド21,210がコイルばね50,500などの付勢手段の付勢力に抗しつつ往復移動することのできる構成であればどのような構成であってもよい。
【0149】
また、上記第1ないし第4実施形態において、操作部5,405とスイッチ部7,407とが着脱自在に結合される構成でもよい。このような構成とすれば、必要に応じて操作部5,405をスイッチ部7,407から着脱できるので、スイッチ本体1,400のメンテナンスを容易に行うことができる。また、操作部5,405とスイッチ部7,407とが外れた場合には、コイルばね50,500などの付勢手段が可動接点39aを固定接点39bに対して開方向に付勢しているため第1開閉器39を確実に開状態とすることができる。また、操作部5,405とスイッチ部7,407とが一体的に結合された構成としてももちろんよい。なお、操作部5,405とスイッチ部7,407とが一体的に形成されたケース内に設けられているときは、ケースの操作部5,405とスイッチ部7,407との境目に切込などを形成して、アクチュエータ3の付勢方向への移動を許容する構造を構成してもよい。
【0150】
また、上記した実施形態において、コイルばね50,500を設けない構成としてもよい。このような構成とすれば、アクチュエータ3の操作部5,405からの引抜操作の操作力や操作回数が、スイッチ本体1の破壊を招かない許容値を超えることにより、操作ロッド21,210が破損した場合や、操作部5,405が破損したり脱落した場合であっても、操作ロッド21,210の引抜操作時における移動方向への移動、すなわち、操作ロッド21,210がスイッチ部7,407から引抜かれる方向への移動が許容されているため、アクチュエータ3の操作部5からの引抜力により駆動カム15,150,415とカムピン22により連結された操作ロッド21,210が確実に操作部5,405側へ移動するので、可動接点39aが固定接点39bから開離するように可動して第1開閉器39を確実に開状態とすることができ、安全性の向上を図ることができる。
【0151】
また、上記した第3実施形態では、係止部材61を駆動カム150に係止して駆動カム150の回転を阻止することにより、アクチュエータ3の引抜操作を阻止するロック機構60により本発明のロック手段を構成したが、ロック手段の構成としてはこれに限られるものではない。例えば、係止部材により操作ロッドを係止することにより、駆動カムの回転を阻止してアクチュエータの引抜操作を阻止するようにしてロック手段を構成してもよい。
【0152】
また、上記した第4実施形態では、1つの第2開閉器40を備える安全スイッチを例に挙げて説明したが、開閉器の数としてはこれに限定されるものではなく、2個以上設けてもよい。また、上記した第4実施形態では、可動接点40aを固定接点40bに対して閉塞する方向へ付勢するコイルばね463を有する第2開閉器40を備えた安全スイッチを例に挙げて説明したが、このような第2開閉器40に代えて、可動接点を固定接点に対して開離する方向へ付勢する付勢手段を有するとともに第2開閉器40と逆の開閉動作を行う開閉器を備える構成でもよい。
【0153】
また、上記した第4実施形態では、コイルばね463により係止部材461を回転阻止位置に移動し、ソレノイドなどにより構成された駆動部により係止部材461を回転許容位置に移動する構成としたが、駆動部により係止部材461を回転阻止位置に移動し、コイルばねなどの付勢手段により係止部材461を回転許容位置に移動する構成としてもよい。
【符号の説明】
【0154】
1,400…スイッチ本体
3…アクチュエータ
5,405…操作部
15,150,415,515,615,715…駆動カム
15c,415c…カム曲線部
15d,415d…ガイド孔(ガイド部)
7,407…スイッチ部
21,210…操作ロッド
22…カムピン(連結手段)
39…第1開閉器
39a…可動接点
39b…固定接点
40…第2開閉器
50,500…コイルばね(付勢手段)
60,460…ロック機構(ロック手段)
61,461…係止部材
【技術分野】
【0001】
この発明は、例えば産業機械等の防護扉周縁の壁面に取り付けられ、防護扉が開かれたときには、産業機械等への電源供給を停止する安全スイッチに関する。
【背景技術】
【0002】
従来、産業機械の防護扉などには、作業者が機械に巻き込まれて負傷するといったトラブルの発生を防止することを目的として、防護扉が完全に閉まっていないときには、機械を駆動させないようにする安全スイッチが配設されている。
【0003】
この種の安全スイッチは、ロボット等の産業機械に電気的に接続されるもので、スイッチ本体とアクチュエータとにより構成されており、スイッチ本体は防護扉周縁の壁面に固着され、またアクチュエータは防護扉に固着される。そのときのアクチュエータの固着位置はスイッチ本体のアクチュエータ進入口に対向し、かつ、防護扉を閉鎖すればスイッチ本体上部のヘッドケース内にアクチュエータが挿入されるように設定されている(例えば特許文献1、2参照)。
【0004】
そして、アクチュエータがヘッドケース内に挿入されることにより、スイッチ本体のヘッドケース(操作部)の下方に位置する内蔵の開閉器が閉に切り換わり、産業機械へ電源が供給されて機械が駆動可能な状態となる。一方、防護扉の開放によりアクチュエータがヘッドケースから引抜かれると、内蔵の開閉器が開に切り換わり、機械への電源供給が遮断される。
【0005】
ところで、操作部の中央には、操作部の下方に位置するスイッチ部の操作ロッドを移動させて開閉器を開閉するための駆動カムが設けられている。この駆動カムはその回転軸が操作部におけるケース部材の内面に枢支されて回転自在に支持されている。また、操作ロッドは、内蔵の開閉器が閉に切り換わる移動方向である操作部の方向に向ってコイルバネで付勢されている。
【0006】
そして、アクチュエータが操作部に挿入されていない状態では、操作ロッドは、コイルバネの付勢力に抗して駆動カムによりスイッチ部側へ押圧されており、内蔵の開閉器は開状態となり産業機械への電源供給が遮断されている。一方、専用のアクチュエータが操作部内に挿入されると、アクチュエータの連結片が駆動カムを押圧して、駆動カムが回転し、その結果、操作ロッドがコイルバネの付勢力により駆動カム側へ移動し、内蔵の開閉器は閉状態に切り換わり産業機械への電源供給が行われる。
【0007】
ところで、上記した安全スイッチには、操作部とスイッチ部とが着脱自在に構成されているものがある。このように、操作部とスイッチ部とが着脱自在に構成されている場合、安全スイッチに過度の衝撃が加わるなどして操作部がスイッチ部から脱離するおそれがある。例えば、アクチュエータが操作部に進入していない状態で、すなわち駆動カムにより操作ロッドがスイッチ部側へ押圧されてスイッチ部の開閉器が開状態である場合に、安全スイッチの操作部がスイッチ部から脱離すれば、駆動カムによる操作ロッドのスイッチ部側への押圧が解除されるので、操作ロッドはコイルバネの付勢力により操作部の方向に移動する。そして、この操作ロッドの操作部側への移動により、アクチュエータが操作部に挿入されていないにも関わらず、スイッチ部の開閉器が閉状態に切り換わり産業機械に電源供給される。このように、操作部とスイッチ部とが脱離するという異常が発生した場合の対策として、上記した特許文献1,2に記載の安全スイッチでは、以下に示す対策を施すことで、操作部とスイッチ部との脱離の検出、あるいは操作部がスイッチ部から脱離することによる誤動作が防止されている。
【0008】
まず、特許文献1に記載の安全スイッチでは回転自在なフィーラ部材を備え、フィーラ部材は、操作ロッドと係脱自在な係合端を有し、操作部がスイッチ部から脱離すれば、操作部による係止が解除されてバネによる付勢力により回転し、係合端が操作ロッドに係合するとともに操作ロッドをスイッチ部側へ移動させる。このように構成すると、操作部がスイッチ部から脱離しても、操作部により係止されていたフィーラ部材がバネによる付勢力によって回転するとともに、係合端が操作ロッドに係合して操作ロッドをスイッチ部側に移動させるため、スイッチ部の開閉器は開状態に維持されて産業機械等への電源供給が遮断される。
【0009】
また、特許文献2に記載の安全スイッチでは、操作部がスイッチ部から脱離することで駆動カムによる操作ロッドのスイッチ部側への押圧が解除されて、操作ロッドがバネによる付勢力で操作部側に過剰変位した場合に開状態に切り換わる変位検知手段としての開閉器を備えている。したがって、変位検知手段としての開閉器を、外部に別途備えた補助電源スイッチや警報装置と接続することで、操作部がスイッチ部から脱離してこの開閉器が開状態となったことを検知することができ、この検知結果に応じて電源スイッチを切ったり、警報装置を作動させて故障の発生を報知することが可能となる。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特表平11−502669号公報(第9頁、第10頁、図3,6)
【特許文献2】特開2003−31084号公報([0035]〜[0038]、図4)
【発明の概要】
【発明が解決しようとする課題】
【0011】
ところで、上記した安全スイッチでは、外部からのアクチュエータの操作部への挿入操作、操作部からの引抜操作を繰返すたびに、操作部に設けられた駆動カムが回転し、駆動カムの外周面と操作ロッドとが摺接する。このように、駆動カムの外周面と操作ロッドとが摺接するたびに、駆動カムの外周面と操作ロッドとの間で、操作ロッドの長手方向にほぼ直交する方向へ摩擦力が発生する。そのため、この摩擦力が繰返し操作ロッドや駆動カムに加わることで操作ロッドや駆動カムに疲労が蓄積し、操作ロッドや駆動カムが磨耗し破損するおそれがある。また、外的負荷により操作ロッドが途中で折れたり、駆動カムが破損することもある。
【0012】
このように、操作ロッドや駆動カムが破損すれば、操作ロッドと駆動カムとの摺接状態が解除されるため、駆動カムによりスイッチ部側に押圧されていた操作ロッドがコイルバネの付勢力で駆動カム側へ移動する。したがって、アクチュエータが操作部に挿入されていないにも関わらず、内蔵の開閉器が閉状態となる。このような異常が発生した場合、特許文献1に記載の安全スイッチでは、操作部がスイッチ部から脱離しなければフィーラ部材が回転しないため、フィーラ部材の係合端が操作ロッドに係合することはなく操作ロッドは操作部側へ移動し、安全スイッチに異常が発生しているにも関わらず産業機械等へ電源が供給される。また、フィーラ部材により操作ロッドをスイッチ部側へ移動させる構成は複雑で、小型化が困難であった。
【0013】
一方、特許文献2に記載の安全スイッチでは、安全スイッチに異常が発生して、操作ロッドが操作部側に過剰変位すれば、変位検知手段としての開閉器が開状態に切り換わるため、安全スイッチに何らかの異常が発生したことを検知することができる。しかしながら、操作ロッドの過剰変位を検知するための開閉器を、産業機械等の電源供給用の開閉器とは別に設けなければならないため、変位検知手段としての開閉器を備えた安全スイッチの小型化を妨げていた。
【0014】
本発明は、上記課題に鑑みてなされたものであり、操作ロッドが破損したり、操作部が破損したり脱落した場合に開閉器を開状態にすることで安全性の向上を図るとともに、簡易な構成で小型化を図ることができる安全スイッチを提供することを目的とする。
【課題を解決するための手段】
【0015】
上記した課題を解決するため、本発明にかかる安全スイッチは、外部からのアクチュエータの挿入操作、引抜操作に応じて作動する作動部材が設けられた操作部と、可動接点および固定接点を有する第1開閉器が設けられたスイッチ部と、前記可動接点を前記固定接点から開離する方向に付勢する付勢手段と、前記作動部材の作動に連動し、前記挿入操作による前記作動部材の作動時に前記付勢手段の付勢力に抗しつつ移動して前記可動接点を可動させて前記固定接点に接触させ、前記引抜操作による前記作動部材の作動時に前記付勢手段の付勢力により移動して前記可動接点を前記挿入操作時とは逆方向に可動させて前記固定接点から開離させる操作ロッドとを備える安全スイッチにおいて、破壊したときに、少なくとも前記操作ロッドの前記付勢手段の付勢方向への移動を許容する構造を備えることを特徴としている(請求項1)。
【0016】
このように構成された発明では、スイッチ部の第1開閉器の可動接点が付勢手段によって固定接点に対して開離する開方向に付勢されており、アクチュエータの操作部への挿入操作に伴う作動部材の作動により、操作ロッドは付勢手段の付勢力に抗しつつ移動して可動接点を可動させて固定接点に接触させ、第1開閉器を閉状態に切換える。また、アクチュエータの操作部からの引抜操作による作動部材の作動により、操作ロッドは付勢手段の付勢力により移動して可動接点をアクチュエータの操作部への挿入操作時とは逆方向に可動させて固定接点から開離させ、第1開閉器を開状態に切換える。そして、破壊したときに、少なくとも操作ロッドの付勢手段の付勢方向への移動を許容する構造を備えている。
【0017】
したがって、操作ロッドが破損した場合や、操作部が破損したりした場合であっても、操作ロッドの付勢手段の付勢方向への移動を許容する構造が破壊することにより操作ロッドの付勢手段の付勢方向への移動が許容されるため、操作ロッドが付勢手段の付勢力により確実に移動するので、可動接点が固定接点から開離するように可動して第1開閉器を確実に開状態とすることができ、安全性の向上を図ることができる。また、付勢手段の付勢方向への操作ロッドの移動が許容されたときの操作ロッドの移動を検出するために開閉器を別途設けたりしなくともよいため、簡易な構成で安全スイッチの小型化を図ることができる。
【0018】
このとき、前記構造は、前記引抜操作の少なくとも操作力または操作回数が破壊を招かない許容値を超えるときに、少なくとも前記操作ロッドの前記付勢手段の付勢方向への移動を許容するように構成するのがよい(請求項2)。
【0019】
ところで、アクチュエータの操作部からの引抜操作の操作力が安全スイッチの破壊を招かない許容値である設計上の強度を超えた場合に、操作ロッドが途中で折れるなどして破損したり、操作部が破損したりするおそれがある。また、アクチュエータの操作部からの引抜操作の操作回数が安全スイッチの破壊を招かない許容値である設計上の耐久度を超えた場合に、繰返し生じる摩擦力により、操作ロッドが途中で曲がったり折れるなどして破損したり、操作部の駆動カムが破損したりするおそれがある。
【0020】
しかしながら、上記した構成とすれば、アクチュエータの引抜操作の少なくとも操作力または操作回数が破壊を招かない許容値を超えるときに、少なくとも操作ロッドの付勢手段の付勢方向への移動を許容する構造を備えており、操作ロッドの付勢手段の付勢方向への移動が許容されて操作ロッドが移動すれば、第1開閉器の可動接点は固定接点に対して開離する方向に移動する。したがって、何らかの外的負荷が操作ロッドに加わり、操作ロッドが破損した場合や、何らかの外的負荷が操作部に加わり、操作部が破損したりした場合であっても、操作ロッドの付勢手段の付勢方向への移動を許容する構造が作用することにより、付勢手段の付勢力により操作ロッドが移動して可動接点を確実に固定接点から開離して第1開閉器を開状態とすることができる。
【0021】
また、前記作動部材は前記挿入操作および前記引抜操作に応じて両方向に回転する駆動カムであり、前記操作ロッドは、前記駆動カムの回転に連動し、前記挿入操作による前記駆動カムの回転時に前記付勢手段の付勢力に抗しつつ移動して前記可動接点を可動させて前記固定接点に接触させ、前記引抜操作による前記駆動カムの回転時に前記付勢手段の付勢力により移動して前記可動接点を前記挿入操作時とは逆方向に可動させて前記固定接点から開離させるようにしてもよい(請求項3)。
【0022】
このような構成すれば、アクチュエータの操作部への挿入操作に伴う駆動カムの回転により、操作ロッドは付勢手段の付勢力に抗しつつ移動して可動接点を可動させて固定接点に接触させ、第1開閉器を閉状態に切換える。また、アクチュエータの操作部からの引抜操作による駆動カムの回転により、操作ロッドは付勢手段の付勢力により移動して可動接点をアクチュエータの操作部への挿入操作時とは逆方向に可動させて固定接点から開離させ、第1開閉器を開状態に切換える。
【0023】
そして、操作ロッドが破損した場合や、操作部が破損したり脱落した場合であっても、操作ロッドの付勢手段の付勢方向への移動を許容する構造が破壊することにより操作ロッドの付勢手段の付勢方向への移動が許容されるため、操作ロッドが付勢手段の付勢力により確実に移動するので、可動接点が固定接点から開離するように可動して第1開閉器を確実に開状態とすることができ、安全性の向上を図ることができる。
【0024】
また、前記構造は、前記駆動カムを支持する支持部に形成されていてもよく(請求項4)、前記スイッチ部は前記操作部に結合可能に形成され、前記構造は、前記操作部と前記スイッチ部との結合部分に形成されていてもよい(請求項5)。
【0025】
このような構成とすれば、アクチュエータの操作部からの引抜操作の操作力や操作回数が破壊を招かない許容値を超えるなどすれば、駆動カムの支持部や操作部とスイッチ部との結合部分に形成された構造が作用して、操作ロッドの付勢手段の付勢方向への移動を許容するように、駆動カムをスイッチ部に対する相対的な設計上の通常位置から移動させるため、確実に操作ロッドが付勢手段の付勢力により移動することができ、可動接点が固定接点から開離するように可動して第1開閉器を確実に開状態とすることができる。
【0026】
また、前記操作ロッドを前記駆動カムの回転に連動するように前記駆動カムに連結する連結手段をさらに備え、前記駆動カムには、径大部と径小部とを有するカム曲線状のガイド部が形成され、前記引抜操作による前記駆動カムの回転時に、前記連結手段が前記ガイド部に沿って前記径大部から前記径小部へ移動することに伴い、前記付勢手段による付勢力に加えて前記操作ロッドを移動させて前記第1開閉器を開状態に切換えるようにしてもよい(請求項6)。
【0027】
このような構成とすれば、連結手段により操作ロッドが駆動カムに連結されているため、アクチュエータの挿入操作、引抜操作に伴う駆動カムの両方向への回転に応じて操作ロッドを確実に往復運動させてスイッチ部の第1開閉器の開閉状態を切換えることができる。さらに、アクチュエータの操作部からの引抜操作による駆動カムの回転時に、連結手段が径大部から径小部へガイド部に沿って移動することに伴う操作ロッドをスイッチ部から引抜く引抜力が、付勢手段による付勢力に加えて操作ロッドを確実に移動させるため、例えば両接点に溶着が生じていても可動接点を固定接点から開離するように確実に可動して第1開閉器を開状態とすることができる。
【0028】
また、前記操作部には、前記駆動カムの回転を阻止する係止部材を有し、前記アクチュエータが前記操作部へ挿入されているときに、前記係止部材により前記駆動カムの回転を阻止することにより、前記引抜操作を阻止するロック手段がさらに設けられていてもよい(請求項7)。
【0029】
このような構成とすれば、ロック手段が駆動カムの回転を阻止することによりアクチュエータの操作部からの引抜操作を阻止することができる。このとき、強引にアクチュエータの引抜操作が行われるなどして、アクチュエータの操作部からの引抜操作の操作力や操作回数が破壊を招かない許容値を超えることにより操作ロッドが破損した場合や、操作部が破損したり脱落した場合であっても、操作ロッドの付勢手段の付勢方向への移動を許容する構造により、操作ロッドが付勢手段の付勢力により確実に移動するので、可動接点が固定接点から開離するように可動して第1開閉器を確実に開状態とすることができる。
【0030】
また、前記ロック手段による前記駆動カムの回転阻止状態と回転許容状態との間の切換えに応じて開閉状態が切換わる第2開閉器をさらに備えるようにしてもよい(請求項8)。
【0031】
このような構成とすれば、ロック手段による駆動カムの回転阻止状態のときに、強引にアクチュエータの引抜操作が行われるなどしても、操作ロッドの付勢手段の付勢方向への移動を許容する構造が破壊すれば、操作ロッドが付勢手段の付勢力により移動して、可動接点が固定接点から開離するように可動して第1開閉器が開状態となるが、ロック手段による駆動カムの回転阻止状態は回転解除状態に切換わらないため、第2開閉器の開閉状態が切換わることはない。したがって、第2開閉器の開閉状態が切換わらない状態において、第1開閉器の開閉状態のみが切換わることで、安全スイッチに何らかの異常が発生したことを確実に検出することができる。
【0032】
また、前記構造は、破壊したときに、前記挿入操作による前記作動部材の作動時の前記操作ロッドの移動による前記可動接点の前記固定接点への接触を阻止する手段を備えるようにしてもよい(請求項9)。
【0033】
このような構成とすれば、操作ロッドの付勢手段の付勢方向への移動を許容する構造が破壊したときに、アクチュエータの挿入操作による作動部材の作動時の操作ロッドの移動による可動接点の固定接点への接触が阻止される。したがって、何らかの異常が発生しているにも関わらず、アクチュエータの挿入操作が行われたときに第1開閉器が閉状態に切換わるのを確実に防止できる。
【0034】
また、本発明にかかる安全スイッチは、外部からのアクチュエータの挿入操作、引抜操作に応じて両方向に回転し、径大部と径小部を有するカム曲線状のガイド部が形成された駆動カムが設けられた操作部と、可動接点および固定接点を有する第1開閉器が設けられたスイッチ部と、前記駆動カムの回転に連動して前記操作部と前記スイッチ部との間を往復移動する操作ロッドと、前記操作ロッドを前記駆動カムの回転に連動するように前記駆動カムに連結する連結手段とを備え、前記挿入操作による前記駆動カムの回転時に前記連結手段が前記ガイド部に沿って前記径小部から前記径大部へ移動するのに前記操作ロッドが連動して前記可動接点を可動させて前記固定接点に接触させ、前記引抜操作による前記駆動カムの回転時に前記連結手段が前記ガイド部に沿って前記径大部から前記径小部へ移動するのに前記操作ロッドが連動して前記可動接点を前記挿入操作時とは逆方向に可動させて前記固定接点から開離させる安全スイッチにおいて、破壊したときに、少なくとも前記操作ロッドの前記引抜操作時における移動方向への移動を許容する構造を備えることを特徴としている(請求項10)。
【0035】
このように構成された発明では、アクチュエータの操作部への挿入操作に伴う駆動カムの回転により、連結手段が径小部から径大部へガイド部に沿って移動するのに伴い操作ロッドが連動してスイッチ部に押込まれて可動接点を可動させ、固定接点に接触させて第1開閉器を閉状態に切換える。また、アクチュエータの操作部からの引抜操作による駆動カムの回転により、連結手段が径大部から径小部へガイド部に沿って移動するのに操作ロッドが連動してスイッチ部から引抜かれる方向に移動して可動接点をアクチュエータの操作部への挿入操作時とは逆方向に可動させて固定接点から開離させ、第1開閉器を開状態に切換える。そして、破壊したときに、少なくとも操作ロッドの引抜操作時における移動方向への移動を許容する構造を備えている。
【0036】
したがって、操作ロッドが破損した場合や、操作部が破損したり脱落したなどの破壊が生じた場合であっても、操作ロッドの引抜操作時における移動方向への移動、すなわち、操作ロッドがスイッチ部から引抜かれる方向への移動を許容する構造が作用して、アクチュエータの操作部からの引抜力により駆動カムと連結された操作ロッドが確実に移動するので、可動接点が固定接点から開離するように可動して第1開閉器を確実に開状態とすることができ、安全性の向上を図ることができる。また、スイッチ部から引抜かれる方向への操作ロッドの移動が許容されたときの操作ロッドの移動を検出するために開閉器を別途設けたりしなくともよいため、簡易な構成で安全スイッチの小型化を図ることができる。
【発明の効果】
【0037】
以上のように、請求項1に記載の発明によれば、操作ロッドが破損した場合や、操作部が破損したりした場合であっても、操作ロッドの付勢手段の付勢方向への移動を許容する構造が破壊することにより操作ロッドの付勢手段の付勢方向への移動が許容されるため、操作ロッドが付勢手段の付勢力により確実に移動するので、可動接点が固定接点から開離するように可動して第1開閉器を確実に開状態とすることができ、安全性の向上を図ることができる。また、付勢手段の付勢方向への操作ロッドの移動が許容されたときの操作ロッドの移動を検出するために開閉器を別途設けたりしなくともよいため、簡易な構成で安全スイッチの小型化を図ることができる。
【0038】
また、請求項2に記載の発明によれば、アクチュエータの引抜操作の少なくとも操作力または操作回数が破壊を招かない許容値を超えるときに、少なくとも操作ロッドの付勢手段の付勢方向への移動を許容する構造を備えており、操作ロッドの付勢手段の付勢方向への移動が許容されて操作ロッドが移動すれば、第1開閉器の可動接点は固定接点に対して開離する方向に移動するので、操作部が破損したりした場合であっても、付勢手段の付勢力により操作ロッドが移動して可動接点を確実に固定接点から開離して第1開閉器を開状態とすることができる。
【0039】
また、請求項3に記載の発明によれば、操作ロッドが破損した場合や、操作部が破損したり脱落した場合であっても、操作ロッドの付勢手段の付勢方向への移動を許容する構造が破壊することにより操作ロッドの付勢手段の付勢方向への移動が許容されるため、操作ロッドが付勢手段の付勢力により確実に移動するので、可動接点が固定接点から開離するように可動して第1開閉器を確実に開状態とすることができ、安全性の向上を図ることができる。
【0040】
また、請求項4,5に記載の発明によれば、アクチュエータの操作部からの引抜操作の操作力や操作回数が破壊を招かない許容値を超えるなどすれば、駆動カムの支持部や操作部とスイッチ部との結合部分に形成された構造が作用して、操作ロッドの付勢手段の付勢方向への移動を許容するように、駆動カムをスイッチ部に対する相対的な設計上の通常位置から移動させるため、確実に操作ロッドが付勢手段の付勢力により移動することができ、可動接点が固定接点から開離するように可動して第1開閉器を確実に開状態とすることができる。
【0041】
また、請求項6に記載の発明によれば、連結手段により操作ロッドが駆動カムに連結されているため、アクチュエータの挿入操作、引抜操作に伴う駆動カムの両方向への回転に応じて操作ロッドを確実に往復運動させてスイッチ部の第1開閉器の開閉状態を切換えることできる。さらに、アクチュエータの操作部からの引抜操作による駆動カムの回転時に、連結手段が径大部から径小部へガイド部に沿って移動することに伴う操作ロッドをスイッチ部から引抜く引抜力が、付勢手段による付勢力に加えて操作ロッドを確実に移動させるため、例えば両接点に溶着が生じていても可動接点を固定接点から開離するように確実に可動して第1開閉器を開状態とすることができる。
【0042】
また、請求項7に記載の発明によれば、ロック手段が駆動カムの回転を阻止することによりアクチュエータの操作部からの引抜操作を阻止することができる。このとき、強引にアクチュエータの引抜操作が行われるなどして、アクチュエータの操作部からの引抜操作の操作力や操作回数が破壊を招かない許容値を超えることにより操作ロッドが破損した場合や、操作部が破損したり脱落した場合であっても、操作ロッドの付勢手段の付勢方向への移動を許容する構造により、操作ロッドが付勢手段の付勢力により確実に移動するので、可動接点が固定接点から開離するように可動して第1開閉器を確実に開状態とすることができる。
【0043】
また、請求項8に記載の発明によれば、ロック手段による駆動カムの回転阻止状態のときに、強引にアクチュエータの引抜操作が行われるなどしたときに、操作ロッドの付勢手段の付勢方向への移動を許容する構造により、操作ロッドが付勢手段の付勢力により移動して、可動接点が固定接点から開離するように可動して第1開閉器が開状態となっても、ロック手段による駆動カムの回転阻止状態は回転解除状態に切換わらないため、第2開閉器の開閉状態が切換わることはない。したがって、第2開閉器の開閉状態が切換わらない状態において、第1開閉器の開閉状態のみが切換わることで、安全スイッチに何らかの異常が発生したことを確実に検出することができる。
【0044】
また、請求項9に記載の発明によれば、操作ロッドの付勢手段の付勢方向への移動を許容する構造が破壊したときに、アクチュエータの挿入操作による作動部材の作動時の操作ロッドの移動による可動接点の固定接点への接触が阻止される。したがって、何らかの異常が発生しているにも関わらず、アクチュエータの挿入操作が行われたときに第1開閉器が閉状態に切換わるのを確実に防止できる。
【0045】
また、請求項10に記載の発明によれば、操作ロッドが破損した場合や、操作部が破損したり脱落したなどの破壊が生じた場合であっても、操作ロッドの引抜操作時における移動方向への移動、すなわち、操作ロッドがスイッチ部から引抜かれる方向への移動を許容する構造が作用して、アクチュエータの操作部からの引抜力により駆動カムと連結された操作ロッドが確実に移動するので、可動接点が固定接点から開離するように可動して第1開閉器を確実に開状態とすることができ、安全性の向上を図ることができる。また、スイッチ部から引抜かれる方向への操作ロッドの移動が許容されたときの操作ロッドの移動を検出するために開閉器を別途設けたりしなくともよいため、簡易な構成で安全スイッチの小型化を図ることができる。
【図面の簡単な説明】
【0046】
【図1】この発明の第1実施形態におけるスイッチ本体の断面図である。
【図2】この発明の第1実施形態におけるスイッチ本体の断面図である。
【図3】この発明の第1実施形態におけるスイッチ本体の断面図である。
【図4】この発明の第1実施形態におけるスイッチ本体の断面図である。
【図5】この発明の第2実施形態におけるスイッチ本体の断面図である。
【図6】この発明の第2実施形態におけるスイッチ本体の断面図である。
【図7】この発明の第2実施形態におけるスイッチ本体の断面図である。
【図8】この発明の第2実施形態におけるスイッチ本体の断面図である。
【図9】この発明の第3実施形態におけるスイッチ本体の断面図である。
【図10】この発明の第3実施形態におけるスイッチ本体の断面図である。
【図11】この発明の第3実施形態におけるスイッチ本体の断面図である。
【図12】この発明の第3実施形態におけるスイッチ本体の断面図である。
【図13】この発明の第3実施形態におけるスイッチ本体の断面図である。
【図14】この発明の第3実施形態におけるスイッチ本体の断面図である。
【図15】この発明の第4実施形態におけるスイッチ本体の断面図である。
【図16】この発明の第4実施形態におけるスイッチ本体の断面図である。
【図17】この発明の第4実施形態におけるスイッチ本体の断面図である。
【図18】この発明の第4実施形態におけるスイッチ本体の断面図である。
【図19】この発明の第4実施形態におけるスイッチ本体の断面図である。
【図20】この発明の第4実施形態におけるスイッチ本体の断面図である。
【図21】この発明の第4実施形態におけるスイッチ本体の断面図である。
【図22】この発明の構造の変形例を示す図である。
【図23】この発明の構造の変形例を示す図である。
【図24】この発明の構造の変形例を示す図である。
【発明を実施するための形態】
【0047】
<第1実施形態>
この発明の第1実施形態について図1ないし図4を参照して説明する。図1ないし図4はスイッチ本体1の正面から見た断面図であり、それぞれ異なる状態を示す図である。本発明における安全スイッチは、外部装置であるロボット等の産業機械等にケーブルを介して電気的に接続されるスイッチであり、スイッチ本体1と、アクチュエータ3とにより構成される。
【0048】
このとき、スイッチ本体1は、操作部5とスイッチ部7とからなり、図示を省略する産業機械の防護扉周縁の壁面に固着される。また、アクチュエータ3は防護扉に固着され、その位置は操作部5の上面および側面に形成されたアクチュエータ進入口9a,9bのうち一方の進入口に対向する位置であり、アクチュエータ3の挿入操作に相当する防護扉の閉鎖によりアクチュエータ3は操作部5のアクチュエータ進入口9a,9b内に挿入される。なお、アクチュエータ3は、コ字状の基部3aと、該基部3aの先端寄りの両側を橋絡して一体形成された連結片3bとから構成されている。
【0049】
スイッチ本体1の上部に配設された操作部5は、図1および図2に示すように、ケース部材11と、回転軸13がこのケース部材11の内面に支持されて、アクチュエータ3の操作部5への挿入操作、操作部5からの引抜操作に応じて両方向に回転するように回転自在に設けられた駆動カム15とを備えている。この駆動カム15の上部外周面には、アクチュエータ3の連結片3bが嵌挿する係合部15a,15bが、上記したアクチュエータ進入口9a,9bから覗く位置に形成されている。また、駆動カム15の下部外周面にはカム曲線部15cが形成されており、側面には径大部と径小部とを有するカム曲線状のガイド孔15d(本発明の「ガイド部」に相当)が形成されている。また、駆動カム15のガイド孔15dが形成されている部分には、外周面から回転軸13にかけて切込15eが形成されており、後述する操作ロッド21の先端が駆動カム15の切込15e部分に挿入された状態で配設される。なお、図1に示す駆動カム15は、切込15e部分の断面を示した部分断面図であり、以下の説明で参照する図面で示す駆動カム15は、同様に全て部分断面図であり、その説明は省略する。
【0050】
また、操作部5の下方に位置するスイッチ部7から先端部分が出退自在に操作部5内に突出する操作ロッド21が設けられ、その先端部にはカムピン(本発明の「連結手段」に相当)22が直交して固着されている。そして、操作ロッド21が駆動カム15の回転に連動して往復移動するようにカムピン22の両端部がそれぞれ両駆動カム15のガイド孔15dに挿通されている。そして、駆動カム15の回転に伴ってカムピン22がガイド孔15dに沿って移動することで、操作ロッド21が操作部5に進入、後退して往復移動し、スイッチ部7に内蔵されている開閉器部70の第1開閉器39の開閉状態が切換えられる。
【0051】
また、操作ロッド21には連結用係合部23が形成されており、この連結用係合部23により操作ロッド21は上側(操作部5側)と下側(スイッチ部7側)とで係脱自在に分離可能に構成されている。したがって、分離状態の操作ロッド21の上側と駆動カム15とが連結された状態の操作部5と、分離状態の操作ロッド21の下側が設けられたスイッチ部7とを個別に製作し、操作ロッド21の連結用係合部23を係合して操作ロッド21を連結することにより操作部5とスイッチ部7とを組合わせて容易にスイッチ本体1を組立てることができる。また、スイッチ部7に交換すべき不具合が生じた場合であっても、スイッチ部7のみを交換するだけで容易にスイッチ本体1を復元することができる。
【0052】
次に、スイッチ部7について説明する。図1に示すように、ケース部材11と結合可能に形成されたケース部材33が、ケース部材11と結合されることにより一体となって直方体状のスイッチ本体1を形成する。そして、スイッチ部7は操作部5の下方に配設される。また、スイッチ部7は、第1開閉器39が内蔵された開閉器部70と、上記した操作ロッド21とを備えている。また、例えばアクチュエータ進入口9aからのアクチュエータ3の進入方向へのねじが、ケース部材11の周壁に形成された挿通孔を介してケース部材33のめねじ孔に螺合したり、ケース部材11を係止爪とその被係止部とからなる係止構造によってケース部材33に係止したりして、ケース部材33に、操作部5側のケース部材11が取付けられている。
【0053】
ところで、開閉器部70は、操作ロッド21の往復移動に連動して開閉する第1開閉器39を備えている。第1開閉器39は、可動接点39aと固定接点39bとからなり、可動接点39aは操作ロッド21と一体的に移動可能に下向きに操作ロッド21に固定され、固定接点39bは開閉器部70に配設された枠部材43に上向きに固定されている。ここで、第1開閉器39は産業機械への電源供給および遮断用であり、第1開閉器39が閉状態となることで、産業機械へ電源が供給される。
【0054】
また、図1に示すように、操作ロッド21の下端と枠部材43との間に、コイルばね50が取付けられ、これにより操作ロッド21が上方、すなわち操作部5の方向に付勢されている。したがって、コイルばね50は操作ロッド21を上方に付勢することにより、第1開閉器39の可動接点39aを固定接点39bに対して開離する方向(開方向)に付勢している。このように、この実施形態ではコイルばね50が本発明の「付勢手段」として機能している。
【0055】
ここで、ケース部材33には、産業機械と電気的に接続されるケーブル(図示省略)が装着されており、開閉器部70の内部においてケーブルと第1開閉器39とが電気的に接続されている。そして、第1開閉器39が開閉することによる電気信号によって、産業機械への電源供給及び電源供給の遮断が行われるようになっている。
【0056】
なお、アクチュエータ3が操作部5に挿入されていない図1の状態では、カムピン22がガイド孔15dに沿って径大部から径小部へ移動しており、操作ロッド21はコイルばね50の付勢力により操作部5側へ移動した状態となっている。この操作ロッド21の操作部5側への移動により可動接点39aも同時に固定接点39bから開離する方向へ移動し、第1開閉器39の可動接点39aおよび固定接点39bが開離し、第1開閉器39が開状態となり、産業機械への電源供給が遮断されて産業機械が操作不能な状態となっている。
【0057】
続いて、上記のように構成されたスイッチ本体1の動作について図1および図2を参照して説明する。図1に示すように、アクチュエータ3がスイッチ本体1の操作部5に挿入されていない場合、操作ロッド21はコイルばね50の付勢力により操作部5側に移動した状態にあり、第1開閉器39は開状態となっており、産業機械への電源供給が遮断されて産業機械が操作不能な状態となっている。
【0058】
次に、図1に示す初期状態から防護扉等を閉じるなどのアクチュエータ3の挿入操作により、例えばアクチュエータ進入口9aからアクチュエータ3が操作部5に挿入されると、図2に示すように、アクチュエータ3の連結片3bが駆動カム15の係合部15aと係合して、アクチュエータ3が進入するに連れて駆動カム15が反時計方向に回転する。駆動カム15が回転するのに伴い、カムピン22がコイルばね50の付勢力に抗しつつガイド孔15dに沿って下動する。
【0059】
そして、カムピン22の下動に伴って、操作ロッド21がコイルばね50の付勢力に抗してスイッチ部7に押込まれて下方に移動する。さらに、操作ロッド21が下方に移動するに連れて、可動接点39aが可動して固定接点39bに接触して第1開閉器39が開状態から閉状態となる。したがって、第1開閉器39が閉状態となるため、この第1開閉器39に直列に接続されているロボット等の産業機械に電源が供給され、産業機械が操作可能な状態となる。
【0060】
一方、防護扉等が開放されるなどのアクチュエータ3の引抜操作により、図1に示すように進入状態のアクチュエータ3が引抜かれると、アクチュエータ3の連結片3bと駆動カム15の係合部15aとの係合状態が解除されるまで駆動カム15がアクチュエータ3の引抜き方向に回転する。この駆動カム15の回転に伴ってカムピン22がガイド孔15dに沿って径大部から径小部へ移動して上動し、このカムピン22の上動に伴い、操作ロッド21がスイッチ部7から引抜かれる方向に移動する。
【0061】
そして、コイルばね50の付勢力と、駆動カム15が回転することによる操作ロッド21をスイッチ部7から引抜く引抜力とにより、操作ロッド21はアクチュエータ3の挿入操作時とは逆方向、すなわち、スイッチ部7から引抜かれて操作部5側へ移動し、可動接点39aは固定接点39bから開離して第1開閉器39が開状態になり、産業機械は操作不能な状態となる。
【0062】
ところで、図1および図2に示すスイッチ本体1では、アクチュエータ3の操作部5からの引抜操作の操作力がスイッチ本体1の破壊を招かない許容値である設計上の強度を超えた場合に、操作ロッド21が途中で折れるなどして破損したり、操作部5が破損したり脱落するおそれがある。また、運搬中の荷物がスイッチ本体1にぶつかったりして、スイッチ本体1に何らかの外力が加わった場合や、防護扉の閉塞操作の際に、アクチュエータ3がアクチュエータ進入口9a,9bから操作部5へ上手く進入することができず、アクチュエータ3が操作部5に当たることによる衝撃などにより、スイッチ本体1が損傷するおそれがある。
【0063】
また、アクチュエータ3の操作部5からの引抜操作の操作回数がスイッチ本体1の破壊を招かない許容値である設計上の耐久度を超えた場合に、繰返し生じる摩擦力により、操作ロッド21が途中で曲がったり折れるなどして破損したり、操作部5の駆動カム15が破損したり、操作ロッド21および駆動カム15の連結部分や回転軸13が磨耗により破損するおそれがある。
【0064】
そこで、本実施形態におけるスイッチ本体1では、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体1の破壊を招かない許容値を超えるときに、破壊することにより少なくとも操作ロッド21のコイルばね50の付勢方向への移動を許容する構造を備えている。操作ロッド21のコイルばね50の付勢方向への移動が許容されて、操作ロッド21が操作部5側に移動すれば、上記したように、第1開閉器39の可動接点39aは固定接点39bに対して開離する方向に移動する。したがって、何らかの外的負荷が操作ロッド21に加わり、操作ロッド21が破損した場合や、何らかの外的負荷が操作部5に加わり、操作部5が破損したり脱落した場合であっても、コイルばね50の付勢力により可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。次に、図3および図4を参照して、操作ロッド21のコイルばね50の付勢方向への移動を許容する具体的な構造について説明する。
【0065】
(1)第1動作例
図3は上記した操作ロッド21のコイルばね50の付勢方向への移動を許容する構造が、回転軸13およびこのケース部材11の内面に設けられた回転軸13を支持する支持部(図示省略)に形成される例を示す図である。図3に示すように、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体1の破壊を招かない許容値を超えるときに、支持部による回転軸13の支持状態が解除されて駆動カム15が操作部5内を上方に移動することにより、操作ロッド21のコイルばね50の付勢方向への移動が許容されるように構成されている。具体的には、ケース部材11の周壁内面において回転軸13を支持する支持部を係止する部分の肉厚が、アクチュエータ進入口9a側において他よりも薄く形成されたり、回転軸13の一部に切込みが形成されたり、回転軸13の一部が細く形成されるなどして折れ易く加工されたりして、操作ロッド21の移動が許容されるようになっている。したがって、操作ロッド21がコイルばね50の付勢力により操作部5側に移動するため、可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。なお、図3中の点線で示す回転軸13は支持部により正常に支持されているときの回転軸13の設計上の通常位置を示している。
【0066】
なお、操作ロッド21のコイルばね50の付勢方向への移動を許容する構造として、回転軸13を支持する支持部を係止する部分の肉厚を薄く形成したり、回転軸13の一部に切込みを形成したり、回転軸13の一部を細く形成したりする構造を例にあげて説明したが、操作ロッド21の付勢方向への移動を許容する構造としてはこれらの例に限られるものではない。例えば、構造としては、単に回転軸13を支持部により支持するものであってもよい。要は、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体1の破壊を招かない許容値を超えるときに、確実に操作ロッド21のコイルばね50の付勢方向への移動を許容する構造であれば、どのような構造であってもよい。
【0067】
(2)第2動作例
図4は上記した操作ロッド21のコイルばね50の付勢方向への移動を許容する構造が、操作部5とスイッチ部7との結合部分に形成されている例を示す図である。図4に示すように、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体1の破壊を招かない許容値を超えるときに、操作部5とスイッチ部7との結合状態が解除されて操作部5とスイッチ部7とが分離することにより、操作ロッド21のコイルばね50の付勢方向への移動が許容されるように構成されている。具体的には、係止爪と被係止部とを備えた係止構造により、ケース部材11をケース部材33に結合するようにしておき、この係止構造が上記許容値を超えるアクチュエータ3の引抜操作により破壊して操作ロッド21の移動を許容するように、係止爪や被係止部の形状、強度を設定しておくのが望ましい。したがって、操作ロッド21がコイルばね50の付勢力により操作部5側に移動するため、可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。
【0068】
なお、操作ロッド21のコイルばね50の付勢方向への移動を許容する構造として、係止爪と被係止部とを備えた係止構造を例にあげて説明したが、操作ロッド21の付勢方向への移動を許容する構造としてはこれらの例に限られるものではない。例えば、構造としては、単にケース部材11とケース部材33とを結合するものであってもよい。要は、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体1の破壊を招かない許容値を超えるときに、確実に操作ロッド21のコイルばね50の付勢方向への移動を許容する構造であれば、どのような構造であってもよい。
【0069】
以上のように、この実施形態では、アクチュエータ3の操作部5からの引抜操作の操作力や操作回数が破壊を招かない許容値を超えることにより操作ロッド21が破損した場合や、操作部5が破損したり脱落した場合であっても、操作ロッド21のコイルばね50付勢方向への移動が許容されているため、コイルばね50の付勢力により操作ロッド21が確実に操作部5側へ移動するので、可動接点39aが固定接点39bから開離するように可動して第1開閉器39を確実に開状態とすることができ、安全性の向上を図ることができる。また、スイッチ本体1の異常時に、コイルばね50の付勢方向への操作ロッド21の移動が許容された時の操作ロッド21の移動を検出するために開閉器を別途設けたりしなくともよいため、簡易な構成で安全スイッチの小型化を図ることができる。
【0070】
また、アクチュエータ3の操作部5からの引抜操作の操作力や操作回数が破壊を招かない許容値を超えるときに、駆動カム15を操作部内に回転自在に支持する支持部や、操作部5とスイッチ部7との結合部分に形成された構造が作用して、操作ロッド21のコイルばね50の付勢方向への移動を許容するように、駆動カム15をスイッチ部7から離れる方向に移動させるため、確実に操作ロッド21がコイルばね50の付勢力により移動することができ、可動接点39aが固定接点39bから開離するように可動して第1開閉器39を確実に開状態とすることができる。
【0071】
また、操作ロッド21と可動接点39aとが一体的に移動するように構成しているため、コイルばね50のみで、操作ロッド21を付勢して移動することにより、可動接点39aを固定接点39bと開離する方向に確実に可動することができ、簡易な構成とすることができる。
【0072】
また、カムピン22により操作ロッド21が駆動カム15に連結されているため、アクチュエータ3の挿入操作、引抜操作に伴う駆動カム15の両方向への回転に応じて操作ロッド21を確実に往復運動させてスイッチ部7の第1開閉器39の開閉状態を切換えることできる。さらに、アクチュエータ3の操作部5からの引抜操作による駆動カム15の回転時に、カムピン22がガイド孔15dに沿って径大部から径小部へ移動することに伴う操作ロッド21をスイッチ部7から引抜く引抜力が、コイルばね50による付勢力に加えて操作ロッド21を確実に操作部5側へ移動させるため、例えば可動接点39aおよび固定接点39bに溶着が生じていても、可動接点39aを固定接点39bから強制的に開離することにより確実に可動して第1開閉器39を開状態とすることができ、安全スイッチの信頼性を向上することができる。
【0073】
また、図3および図4に示すように、アクチュエータ3の操作部5からの引抜操作の操作力や操作回数が破壊を招かない許容値を超えることにより操作ロッド21が破損した場合や、操作部5が破損したり脱落した場合などに、駆動カム15が移動する方向は、アクチュエータ3の引抜操作における操作力が働く方向によれば、第1開閉器39が開状態となる操作ロッド21の移動方向、すなわち、コイルばね50による操作ロッド21の付勢方向とほぼ同じ方向となる。したがって、アクチュエータ3の挿入操作、引抜操作という安全スイッチの通常の使用状態において、アクチュエータ3の操作部5からの引抜操作の操作力や操作回数が破壊を招かない許容値を超えたとしても、図3および図4に示す操作ロッド21のコイルばね50の付勢方向への移動を許容する構造がより確実に作用するため、安全スイッチの信頼性をさらに向上することができる。
【0074】
<第2実施形態>
本発明にかかる安全スイッチの第2実施形態について図5ないし図8を参照して説明する。この第2実施形態において、上記第1実施形態と相違する点は、操作ロッド210の上部にフランジ部210aが形成され、フランジ部210aとケース部材33との間に、コイルばね(本発明の「付勢手段」に相当)500が操作ロッド210に外嵌された状態で取り付けられ、これにより操作ロッド210が上方、すなわち操作部5側に付勢されている点である。そして、コイルばね500は、操作ロッド210を操作部5側へ付勢することにより、第1開閉器39の可動接点39aを固定接点39bに対して離間する方向(開方向)に付勢している。その他の構成および動作は上記第1実施形態と同様であるため、以下においては図1および図4も参照しつつ主として第1実施形態との相違点について詳述する。なお、第1実施形態と同一の構成および動作については、同一符号を引用してその構成および動作の説明を省略する。
【0075】
図5ないし図8はスイッチ本体1の正面から見た断面図であり、それぞれ異なる状態を示す図である。図5に示すように、アクチュエータ3がスイッチ本体1の操作部5に挿入されていない場合、操作ロッド210はコイルばね500の付勢力により操作部5側に移動した状態にあり、第1開閉器39は開状態となっており、産業機械への電源供給が遮断されて産業機械が操作不能な状態となっている。
【0076】
次に、図5に示す初期状態から防護扉等を閉じるなどのアクチュエータ3の挿入操作により、例えばアクチュエータ進入口9aからアクチュエータ3が操作部5に挿入されると、図6に示すように、アクチュエータ3の連結片3bが駆動カム15の係合部15aと係合して、アクチュエータ3が進入するに連れて駆動カム15が反時計方向に回転する。駆動カム15が回転するのに伴い、カムピン22がコイルばね500の付勢力に抗しつつガイド孔15dに沿って下動する。
【0077】
そして、カムピン22の下動に伴って、操作ロッド210がコイルばね500の付勢力に抗してスイッチ部7に押込まれて下方に移動する。さらに、操作ロッド210が下方に移動するに連れて、可動接点39aが可動して固定接点39bに接触して第1開閉器39が開状態から閉状態となる。したがって、第1開閉器39が閉状態となるため、この第1開閉器39に直列に接続されているロボット等の産業機械に電源が供給され、産業機械が操作可能な状態となる。
【0078】
一方、防護扉等が開放されるなどのアクチュエータ3の引抜操作により、図5に示すように進入状態のアクチュエータ3が引抜かれると、アクチュエータ3の連結片3bと駆動カム15の係合部15aとの係合状態が解除されるまで駆動カム15がアクチュエータ3の引抜き方向に回転する。この駆動カム15の回転に伴ってカムピン22がガイド孔15dに沿って径大部から径小部へ移動して上動し、このカムピン22の上動に伴い操作ロッド210がスイッチ部7から引抜かれる方向に移動する。
【0079】
そして、コイルばね500の付勢力と、駆動カム15が回転することによる操作ロッド210をスイッチ部7から引抜く引抜力により、操作ロッド210はアクチュエータ3の挿入操作時とは逆方向、すなわち、スイッチ部7から引抜かれて操作部5側へ移動し、可動接点39aは固定接点39bから開離して第1開閉器39が開状態になり、産業機械は操作不能な状態となる。
【0080】
本実施形態では、上記した第1実施形態と同様に、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体1の破壊を招かない許容値を超えるときに、少なくとも操作ロッド210のコイルばね500の付勢方向への移動を許容する構造を備えている。上記したように、操作ロッド210のコイルばね500の付勢方向への移動が許容されて操作ロッド210が操作部5側に移動すれば、第1開閉器39の可動接点39aは固定接点39bに対して開離する方向に移動する。したがって、何らかの外的負荷が操作ロッド210に加わり、操作ロッド210が破損した場合や、何らかの外的負荷が操作部5に加わり、操作部5が破損したり脱落した場合であっても、コイルばね500の付勢力により可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。次に、図7および図8を参照して、操作ロッド210のコイルばね500の付勢方向への移動を許容する具体的な構造について説明する。
【0081】
(3)第3動作例
図7は上記した操作ロッド210のコイルばね500の付勢方向への移動を許容する構造が、回転軸13およびこのケース部材11の内面に設けられた回転軸13を支持する支持部(図示省略)に形成されている例を示す図である。図7に示すように、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体1の破壊を招かない許容値を超えるときに、支持部による回転軸13の支持状態が解除されて駆動カム15が操作部5内を上方に移動することにより、操作ロッド210のコイルばね500の付勢方向への移動が許容されるように構成されている。具体的構成は、上記第1実施形態の第1動作例で説明したものと同様であるのが望ましい。したがって、操作ロッド210がコイルばね500の付勢力により操作部5側に移動するため、可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。なお、図7中の点線で示す回転軸13は支持部により正常に支持されているときの回転軸13の設計上の通常位置を示している。
【0082】
(4)第4動作例
図8は上記した操作ロッド210のコイルばね500の付勢方向への移動を許容する構造が、操作部5とスイッチ部7との結合部分に形成されている例を示す図である。図8に示すように、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体1の破壊を招かない許容値を超えるときに、操作部5とスイッチ部7との結合状態が解除されて操作部5とスイッチ部7とが分離することにより、操作ロッド210のコイルばね500の付勢方向への移動が許容されるように構成されている。具体的構成は、上記第1実施形態の第2動作例で説明したものと同様であるのが望ましい。したがって、操作ロッド210がコイルばね500の付勢力により操作部5側に移動するため、可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。
【0083】
以上のように、本実施形態では、上記第1実施形態と同様の効果を奏することができる。
【0084】
<第3実施形態>
本発明にかかる安全スイッチの第3実施形態について図9ないし図14を参照して説明する。この第3実施形態において、上記第1実施形態と相違する点は、操作部5に、駆動カム150に係止して駆動カム150の回転を阻止する係止部材61を有し、アクチュエータ3が操作部5へ挿入されているときに、係止部材61を駆動カム150に係止して駆動カム150の回転を阻止することにより、アクチュエータ3の引抜操作を阻止するロック機構60が設けられている点である。係止部材61はコ字状に形成されており、基部62と、基部62の先端寄りの両側を橋絡して一体形成された係止片63とから構成され、基部の屈曲部62aを揺動の中心として揺動自在に構成されている。そして、図10に示すように、本実施形態の駆動カム150には係止部15fが形成されており、アクチュエータ3が操作部5に挿入された状態で係止部材61が屈曲部62aを揺動の中心として駆動カム150側に揺動することで、係止片63が係止部15fに係止して、駆動カム150の回転を阻止するように構成されている。その他の構成および動作は上記第1実施形態と同様であるため、以下においては図1および図4も参照しつつ主として第1実施形態との相違点について詳述する。なお、第1実施形態と同一の構成および動作については、同一符号を引用してその構成および動作の説明を省略する。
【0085】
図9ないし図14はスイッチ本体1の正面から見た断面図であり、それぞれ異なる状態を示す図である。図9に示すように、アクチュエータ3がスイッチ本体1の操作部5に挿入されていない場合、操作ロッド21はコイルばね50の付勢力により操作部5側に移動した状態にあり、第1開閉器39は開状態となっており、産業機械への電源供給が遮断されて産業機械が操作不能な状態となっている。また、係止部材61は屈曲部62aを揺動の中心としてケース部材11側へ揺動している。
【0086】
次に、図9に示す初期状態から防護扉等を閉じるなどのアクチュエータ3の挿入操作により、例えばアクチュエータ進入口9aからアクチュエータ3が操作部5に挿入されると、図10に示すように、アクチュエータ3の連結片3bが駆動カム150の係合部15aと係合して、アクチュエータ3が進入するに連れて駆動カム150が反時計方向に回転する。駆動カム150が回転するのに伴い、カムピン22がコイルばね50の付勢力に抗しつつガイド孔15dに沿って下動する。
【0087】
そして、カムピン22の下動に伴って、操作ロッド21がコイルばね50の付勢力に抗してスイッチ部7に押込まれて下方に移動する。さらに、操作ロッド21が下方に移動するに連れて、可動接点39aが可動して固定接点39bに接触して第1開閉器39が開状態から閉状態となる。したがって、第1開閉器39が閉状態となるため、この第1開閉器39に直列に接続されているロボット等の産業機械に電源が供給され、産業機械が操作可能な状態となる。そして、アクチュエータ3が操作部5に挿入された状態で、係止部材61が屈曲部62aを揺動の中心として駆動カム150側へ揺動することにより、係止片63が係止部15fに係止して駆動カム150の回転が阻止されて、アクチュエータ3の操作部5からの引抜操作が阻止される。
【0088】
一方、ソレノイドなどを利用した周知のロック解除手段(図示省略)により、係止部材61を屈曲部62aを揺動の中心としてケース部材11側へ揺動して係止片63の係止部15fへの係止状態を解除した状態で、防護扉等が開放されるなどのアクチュエータ3の引抜操作が行われると、図9に示すように進入状態のアクチュエータ3が引抜かれて、アクチュエータ3の連結片3bと駆動カム150の係合部15aとの係合状態が解除されるまで駆動カム150がアクチュエータ3の引抜き方向に回転する。この駆動カム150の回転に伴ってカムピン22がガイド孔15dに沿って径大部から径小部へ移動して上動し、操作ロッド21がスイッチ部7から引抜かれる。
【0089】
そして、コイルばね50の付勢力と、駆動カム150が回転することによる操作ロッド21をスイッチ部7から引抜く引抜力により、操作ロッド21はアクチュエータ3の挿入操作時とは逆方向、すなわち、スイッチ部7から引抜かれて操作部5側へ移動し、可動接点39aは固定接点39bから開離して第1開閉器39が開状態になり、産業機械は操作不能な状態となる。
【0090】
本実施形態では、上記した第1実施形態と同様に、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体1の破壊を招かない許容値を超えるときに、少なくとも操作ロッド21のコイルばね50の付勢方向への移動を許容する構造を備えている。上記したように、操作ロッド21のコイルばね50の付勢方向への移動が許容されて操作ロッド21が操作部5側に移動すれば、第1開閉器39の可動接点39aは固定接点39bに対して開離する方向に移動する。したがって、上記した例に加え、防護扉の閉塞操作において、アクチュエータ3の操作部5への挿入と同時にロック機構60によりアクチュエータ3の操作部5からの引抜操作が阻止されたときに、防護扉の閉塞速度が速すぎることによる防護扉のはね返り力による引抜力がアクチュエータ3に加わるなど、何らかの外的負荷が操作ロッド21に加わり、操作ロッド21が破損した場合や、何らかの外的負荷が操作部5に加わり、操作部5が破損したり脱落した場合であっても、コイルばね50の付勢力により可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。次に、図11ないし図14を参照して、操作ロッド21のコイルばね50の付勢方向への移動を許容する具体的な構造について説明する。
【0091】
(5)第5動作例
図11は上記した操作ロッド21のコイルばね50の付勢方向への移動を許容する構造が、回転軸13およびこのケース部材11の内面に設けられた回転軸13を支持する支持部(図示省略)に形成されている例を示す図である。図11に示すように、ロック機構60によりアクチュエータ3の操作部5からの引抜操作が阻止された状態で、強引にアクチュエータ3の引抜操作が行われることにより、引抜操作の操作力がスイッチ本体1の破壊を招かない許容値を超えるときに、支持部による回転軸13の支持状態が解除されて駆動カム150が操作部5内を上方に移動することにより、操作ロッド21のコイルばね50の付勢方向への移動が許容されるように構成されている。具体的構成は、上記第1実施形態の第1動作例で説明したものと同様であるのが望ましい。したがって、操作ロッド21がコイルばね50の付勢力により操作部5側に移動するため、可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。なお、図11中の点線で示す回転軸13は支持部により正常に支持されているときの回転軸13の設計上の通常位置を示している。
【0092】
(6)第6動作例
図12は上記した操作ロッド21のコイルばね50の付勢方向への移動を許容する構造が、駆動カム150の回転を阻止するロック機構60に形成されている例である。図12に示すように、ロック機構60によりアクチュエータ3の操作部5からの引抜操作が阻止された状態で、強引にアクチュエータ3の引抜操作が行われることにより、引抜操作の操作力がスイッチ本体1の破壊を招かない許容値を超えるときに、係止部材61が破損することによりロック機構60による駆動カム150の回転の阻止状態が解除されて駆動カム150が時計回りに回転することにより、操作ロッド21のコイルばね50の付勢方向への移動が許容されるように構成されている。具体的には、係止部材61の一部に切込みが形成されるなどして折れ易く加工されたりして、操作ロッド21の移動が許容されるようになっていることが望ましい。したがって、操作ロッド21がコイルばね50の付勢力により操作部5側に移動するため、可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。
【0093】
(7)第7動作例
図13は上記した操作ロッド21のコイルばね50の付勢方向への移動を許容する構造が、駆動カム150に形成されている例である。図13に示すように、ロック機構60によりアクチュエータ3の操作部5からの引抜操作が阻止された状態で、強引にアクチュエータ3の引抜操作が行われることにより、引抜操作の操作力がスイッチ本体1の破壊を招かない許容値を超えるときに、駆動カム150が破損することにより駆動カム150により操作ロッド21のスイッチ7側への押込み状態が解除されて、操作ロッド21のコイルばね50の付勢方向への移動が許容されるように構成されている。具体的には、駆動カム150の一部に切込みが形成されるなどして折れ易く加工されたりして、操作ロッド21の移動が許容されるようになっていることが望ましい。したがって、操作ロッド21がコイルばね50の付勢力により操作部5側に移動するため、可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。
【0094】
(8)第8動作例
図14は上記した操作ロッド21のコイルばね50の付勢方向への移動を許容する構造が、操作部5とスイッチ部7との結合部分に形成されている例を示す図である。図14に示すように、ロック機構60によりアクチュエータ3の操作部5からの引抜操作が阻止された状態で、強引にアクチュエータ3の引抜操作が行われることにより、引抜操作の操作力がスイッチ本体1の破壊を招かない許容値を超えるときに、操作部5とスイッチ部7との結合状態が解除されて操作部5とスイッチ部7とが分離することにより、操作ロッド21のコイルばね50の付勢方向への移動が許容されるように構成されている。具体的構成は、上記第1実施形態の第2動作例で説明したものと同様であるのが望ましい。したがって、操作ロッド21がコイルばね50の付勢力により操作部5側に移動するため、可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。
【0095】
以上のように、本実施形態では、上記第1実施形態と同様の効果を奏することができるとともに以下の効果を奏することができる。すなわち、ロック機構60が駆動カム150の回転を阻止することによりアクチュエータ3の操作部5からの引抜操作を阻止することができる。このとき、強引にアクチュエータ3の引抜操作が行われて、アクチュエータ3の操作部5からの引抜操作の操作力がスイッチ本体1の破壊を招かない許容値を超えることにより操作部5が破損したり脱落した場合であっても、操作ロッド21のコイルばね50の付勢方向への移動が許容されているため、操作ロッド21がコイルばね50の付勢力により確実に操作部5側に移動するので、可動接点39aが固定接点39bから開離するように可動して第1開閉器39を確実に開状態とすることができる。
【0096】
<第4実施形態>
本発明にかかる安全スイッチの第4実施形態について図15ないし図21を参照して説明する。この第4実施形態において、上記第3実施形態と相違する点は、ロック機構(本発明の「ロック手段」に相当)460による駆動カム415の回転阻止状態と回転許容状態との間の切換えに応じて開閉状態が切換わる第2開閉器40をさらに備えている点である。また、本実施形態では、ロック機構460はケース部材433内であって操作部405の右方に設けられている。そして、先端462が出退自在に操作部405内に突出するように設けられた係止部材461が、駆動カム415に形成された係止部415fに係止することにより、ロック機構460は駆動カム415の回転を阻止するように構成されている。このロック機構460の構成については後で詳細に説明する。その他の構成および動作は上記第3実施形態と同様であるため、以下においては図9ないし図14も参照しつつ主として第3実施形態との相違点について詳述する。なお、第3実施形態と同一の構成および動作については、同一および相当符号を引用してその構成および動作の詳細な説明を省略する。
【0097】
図15ないし図21はスイッチ本体400の正面から見た断面図であり、それぞれ異なる状態を示す図である。本実施形態における安全スイッチは、上記した安全スイッチと同様に、外部装置であるロボット等の産業機械等にケーブルを介して電気的に接続されるスイッチであり、スイッチ本体400と、アクチュエータ3とにより構成される。
【0098】
このとき、スイッチ本体400は、操作部405とスイッチ部407とからなり、図示を省略する産業機械の防護扉周縁の壁面に固着される。また、アクチュエータ3は防護扉に固着され、その位置は操作部405の上面に形成されたアクチュエータ進入口409に対向する位置であり、アクチュエータ3の挿入操作に相当する防護扉の閉鎖によりアクチュエータ3は操作部405のアクチュエータ進入口409内に挿入される。なお、アクチュエータ3は、コ字状の基部3aと、該基部3aの先端寄りの両側を橋絡して一体形成された連結片3bとから構成されている。
【0099】
スイッチ本体400の左上部に配設された操作部405は、図15ないし図17に示すように、ケース部材411と、回転軸413がこのケース部材411の内面に支持されて、アクチュエータ3の操作部405への挿入操作、操作部405からの引抜操作に応じて両方向に回転するように回転自在に設けられた駆動カム415とを備えている。この駆動カム415の上部外周面には、アクチュエータ3の連結片3bが嵌挿する係合部415aが、上記したアクチュエータ進入口409から覗く位置に形成されている。
【0100】
また、駆動カム415の下部外周面にはカム曲線部415cが形成されており、側面には径大部と径小部とを有するカム曲線状のガイド孔415d(本発明の「ガイド部」に相当)が形成されている。また、駆動カム415のガイド孔415dが形成されている部分には、外周面から回転軸413にかけて切込415eが形成されており、後述する操作ロッド21の先端が駆動カム415の切込415e部分に挿入された状態で配設される。なお、図15に示す駆動カム415は、切込415e部分の断面を示した部分断面図であり、以下の説明で参照する図面で示す駆動カム415は、同様に全て部分断面図であり、その説明は省略する。
【0101】
また、操作部405の下方に位置するスイッチ部407から先端部分が出退自在に操作部405内に突出する操作ロッド21が設けられ、その先端部にはカムピン22が直交して固着されている。そして、操作ロッド21が駆動カム415の回転に連動して往復移動するようにカムピン22の両端部がそれぞれ駆動カム415のガイド孔415dに挿通されている。そして、駆動カム415の回転に伴ってカムピン22がガイド孔415dに沿って移動することで、操作ロッド21が操作部405に進入、後退して往復移動し、スイッチ部407に内蔵されている開閉器部70の第1開閉器39の開閉状態が切換えられる。
【0102】
また、操作ロッド21には連結用係合部23が形成されており、この連結用係合部23により操作ロッド21は上側(操作部405側)と下側(スイッチ部407側)とで係脱自在に分離可能に構成されている。したがって、分離状態の操作ロッド21の上側と駆動カム415とが連結された状態の操作部405と、分離状態の操作ロッド21の下側が設けられたスイッチ部407とを個別に製作し、操作ロッド21の連結用係合部23を係合して操作ロッド21を連結することにより操作部405とスイッチ部407とを組合わせて容易にスイッチ本体400を組立てることができる。また、スイッチ部407に交換すべき不具合が生じた場合であっても、スイッチ部407のみを交換するだけで容易にスイッチ本体400を復元することができる。
【0103】
次に、スイッチ部407について説明する。図15に示すように、ケース部材411と結合可能に形成されたケース部材433が、ケース部材411と結合されることにより一体となって直方体状のスイッチ本体400を形成する。また、スイッチ部407は、第1開閉器39が内蔵された開閉器部70と、上記した操作ロッド21と、ロック機構460とを備えている。また、例えばアクチュエータ進入口409からのアクチュエータ3の進入方向へのねじが、ケース部材411の周壁に形成された挿通孔を介してケース部材433のめねじ孔に螺合したり、ケース部材411を係止爪とその被係止部とからなる係止構造によってケース部材433に係止したりして、ケース部材433に、ケース部材411が取付けられている。
【0104】
ところで、開閉器部70は、操作ロッド21の往復移動に連動して開閉する第1開閉器39を備えている。第1開閉器39は、可動接点39aと固定接点39bとからなり、可動接点39aは操作ロッド21と一体的に移動可能に下向きに操作ロッド21に固定され、固定接点39bは開閉器部70に配設された枠部材43に上向きに固定されている。ここで、第1開閉器39は産業機械への電源供給および遮断用であり、第1開閉器39が閉状態となることで、産業機械へ電源が供給される。
【0105】
また、図15に示すように、操作ロッド21の下端と枠部材43との間に、コイルばね50が取付けられ、これにより操作ロッド21が上方、すなわち操作部405の方向に付勢されている。したがって、コイルばね50は操作ロッド21を上方に付勢することにより、第1開閉器39の可動接点39aを固定接点39bに対して開離する方向(開方向)に付勢している。
【0106】
ここで、ケース部材433には、産業機械と電気的に接続されるケーブル(図示省略)が装着されており、開閉器部70の内部においてケーブルと第1開閉器39とが電気的に接続されている。そして、第1開閉器39が開閉することによる電気信号によって、産業機械への電源供給及び電源供給の遮断が行われるようになっている。
【0107】
なお、アクチュエータ3が操作部405に挿入されていない図15の状態では、カムピン22がガイド孔415dに沿って径大部から径小部へ移動しており、操作ロッド21はコイルばね50の付勢力により操作部405側へ移動した状態となっている。この操作ロッド21の操作部405側への移動により可動接点39aも同時に固定接点39bから開離する方向へ移動し、第1開閉器39の可動接点39aおよび固定接点39bが開離し、第1開閉器39が開状態となり、産業機械への電源供給が遮断されて産業機械が操作不能な状態となっている。
【0108】
次に、ロック機構460について説明する。このロック機構460は、図15に示すように、ケース部材433の内部であって操作部405の右方に配設され、上記した係止部材461と、係止部材461を移動させるコイルばね463およびソレノイドなどを利用した周知の駆動部(図示省略)と、第2開閉器40とを備えている。
【0109】
ロック機構460の係止部材461は、図15に示す回転許容位置と、図16に示す回転阻止位置との間を、駆動カム415の回転軸413に対してほぼ直交方向に移動自在に設けられている。そして、図16に示すように、係止部材461が回転阻止位置に移動したときに、先端462が駆動カム415に形成された係止部415fに係止することによって、ロック機構460は駆動カム415の回転を阻止して回転阻止状態とする。一方、係止部材461が、図15および図17に示す回転許容位置に移動したときに、先端462と係止部415fとの係止状態が解除され、駆動カム415が回転可能な回転許容状態となる。
【0110】
また、係止部材461は、コイルばね463により左方の回転阻止位置に付勢されている。一方、ソレノイドなどを利用した駆動部が通電されることにより、係止部材461はコイルばね463の付勢力に抗して右方の回転許容位置に移動される。
【0111】
すなわち、図16に示すように、駆動部が通電遮断されていれば、係止部材461はコイルばね463により左方に付勢されて回転阻止位置に移動して、駆動カム415の回転を阻止し、回転阻止状態とする。一方、駆動部が通電されれば、図17に示すように、係止部材461はコイルばね463の付勢力に抗しつつ右方の回転許容位置に移動して、駆動カム415の回転を許容し、回転許容状態とする。
【0112】
したがって、図16に示すように、アクチュエータ3が操作部405に挿入された状態で係止部材461がコイルばね463の付勢力により左方に移動することで、先端462が係止部415fに係止して、駆動カム415が回転阻止状態となることで、アクチュエータ3の引抜操作が阻止される。一方、図17に示すように、アクチュエータ3が操作部405に挿入された状態で駆動部が通電されることにより係止部材461がコイルばね463の付勢力に抗して右方に移動することで、先端462と係止部415fとの係止状態が解除されて駆動カム415の回転が許容され、アクチュエータ3の引抜操作が可能となる。
【0113】
また、第2開閉器40は、可動接点40aと固定接点40bとからなり、可動接点40aは係止部材461と一体的に移動可能に左向きに係止部材461に固定され、固定接点40bはケース部材433に配設された枠部材(図示省略)に右向きに固定されている。したがって、可動接点40aは係止部材461に連動して同じ方向に移動することとなり、係止部材461が左方に移動した場合、すなわち、係止部材461が回転阻止位置に移動した場合、第2開閉器40は閉状態となり、係止部材461が右方へ移動した場合、すなわち、係止部材461が回転許容位置に移動した場合、第2開閉器40は開状態となる。また、この第2開閉器40の電気信号をモニタすることによって、係止部材461の動作を検出することができる。
【0114】
続いて、上記のように構成されたスイッチ本体400の動作について図15ないし図17を参照して説明する。図15に示すように、アクチュエータ3がスイッチ本体400の操作部405に挿入されていない場合、操作ロッド21はコイルばね50の付勢力により操作部405側に移動した状態にあり、第1開閉器39は開状態となっており、産業機械への電源供給が遮断されて産業機械が操作不能な状態となっている。また、係止部材461は、先端462が駆動カム415の周面によりケース部材433側に押圧されて回転許容位置に移動しており、第2開閉器40は開状態となっている。
【0115】
次に、図15に示す初期状態から防護扉等を閉じるなどのアクチュエータ3の挿入操作により、アクチュエータ進入口409からアクチュエータ3が操作部405に挿入されると、図16に示すように、アクチュエータ3の連結片3bが駆動カム415の係合部415aと係合して、アクチュエータ3が進入するに連れて駆動カム415が反時計方向に回転する。駆動カム415が回転するのに伴い、カムピン22がコイルばね50の付勢力に抗しつつガイド孔415dに沿って下動する。
【0116】
そして、カムピン22の下動に伴って、操作ロッド21がコイルばね50の付勢力に抗してスイッチ部407に押込まれて下方に移動する。さらに、操作ロッド21が下方に移動するに連れて、可動接点39aが可動して固定接点39bに接触して第1開閉器39が開状態から閉状態となる。したがって、第1開閉器39が閉状態となるため、この第1開閉器39に直列に接続されているロボット等の産業機械に電源が供給され、産業機械が操作可能な状態となる。
【0117】
また、アクチュエータ3が操作部405に挿入された状態で、係止部材461がコイルばね463の付勢力により左方の回転阻止位置に移動して、先端462が係止部415fに係止して駆動カム415の回転が阻止されて回転阻止状態となり、アクチュエータ3の操作部405からの引抜操作が阻止される。このとき、係止部材461の左方への移動に連動して可動接点40aが左方に移動して固定接点40bに接触し、第2開閉器40が開状態から閉状態となる。
【0118】
一方、図17に示すように、ソレノイドなどを利用した周知の駆動部が通電されることにより、係止部材461がコイルばね463の付勢力に抗して右方の回転許容位置に移動されると、駆動カム415が回転許容状態となると共に、係止部材461の右方への移動に連動して可動接点40aが右方へ移動して固定接点40bから開離し、第2開閉器40が閉状態から開状態となる。この駆動カム415の回転許容状態において、防護扉等が開放されるなどのアクチュエータ3の引抜操作が行われると、図15に示すように進入状態のアクチュエータ3が引抜かれて、アクチュエータ3の連結片3bと駆動カム415の係合部415aとの係合状態が解除されるまで駆動カム415がアクチュエータ3の引抜き方向に回転する。この駆動カム415の回転に伴ってカムピン22がガイド孔415dに沿って径大部から径小部へ移動して上動し、操作ロッド21がスイッチ部407から引抜かれる。
【0119】
そして、コイルばね50の付勢力と、駆動カム415が回転することによる操作ロッド21をスイッチ部407から引抜く引抜力により、操作ロッド21はアクチュエータ3の挿入操作時とは逆方向、すなわち、スイッチ部407から引抜かれて操作部405側へ移動し、可動接点39aは固定接点39bから開離して第1開閉器39が開状態になり、産業機械は操作不能な状態となる。
【0120】
本実施形態では、上記した第3実施形態と同様に、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体400の破壊を招かない許容値を超えるときに、少なくとも操作ロッド21のコイルばね50の付勢方向への移動を許容する構造を備えている。上記したように、操作ロッド21のコイルばね50の付勢方向への移動が許容されて操作ロッド21が操作部405側に移動すれば、第1開閉器39の可動接点39aは固定接点39bに対して開離する方向に移動する。したがって、上記した例に加え、防護扉の閉塞操作において、アクチュエータ3の操作部405への挿入と同時にロック機構460によりアクチュエータ3の操作部405からの引抜操作が阻止されたときに、防護扉の閉塞速度が速すぎることによる防護扉のはね返り力による引抜力がアクチュエータ3に加わるなど、何らかの外的負荷が駆動カム415に加わり、それにより操作ロッド21が破損した場合や、何らかの外的負荷が操作部405に加わり、操作部405が破損したり脱落した場合であっても、コイルばね50の付勢力により可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。次に、図18ないし図21を参照して、操作ロッド21のコイルばね50の付勢方向への移動を許容する具体的な構造について説明する。
【0121】
(9)第9動作例
図18は上記した操作ロッド21のコイルばね50の付勢方向への移動を許容する構造が、回転軸413およびこのケース部材411の内面に設けられた回転軸413を支持する支持部(図示省略)に形成されている例を示す図である。図18に示すように、ロック機構460によりアクチュエータ3の操作部405からの引抜操作が阻止された状態で、強引にアクチュエータ3の引抜操作が行われることにより、引抜操作の操作力がスイッチ本体400の破壊を招かない許容値を超えるときに、支持部による回転軸413の支持状態が解除されて駆動カム415が操作部405内を上方に移動することにより、操作ロッド21のコイルばね50の付勢方向への移動が許容されるように構成されている。具体的構成は、上記第1実施形態の第1動作例で説明したものと同様であるのが望ましい。したがって、操作ロッド21がコイルばね50の付勢力により操作部405側に移動するため、可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。なお、図18中の点線で示す回転軸413は支持部により正常に支持されているときの回転軸413の設計上の通常位置を示している。
【0122】
また、このとき、係止部材461は左方の回転阻止位置へ移動したままであるため、第1開閉器39が閉状態から開状態となったにも関わらず、第2開閉器40は閉状態のままである。
【0123】
(10)第10動作例
図19は上記した操作ロッド21のコイルばね50の付勢方向への移動を許容する構造が、駆動カム415の回転を阻止するロック機構460に形成されている例である。図19に示すように、ロック機構460によりアクチュエータ3の操作部405からの引抜操作が阻止された状態で、強引にアクチュエータ3の引抜操作が行われることにより、引抜操作の操作力がスイッチ本体400の破壊を招かない許容値を超えるときに、係止部材461の先端462が破損することによりロック機構460による駆動カム415の回転阻止状態が解除されて駆動カム415が時計回りに回転することにより、操作ロッド21のコイルばね50の付勢方向への移動が許容されるように構成されている。具体的には、係止部材461の先端462の一部に切込みが形成されるなどして折れ易く加工されたりして、操作ロッド21の移動が許容されるようになっていることが望ましい。したがって、操作ロッド21がコイルばね50の付勢力により操作部405側に移動するため、可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。
【0124】
また、このとき、係止部材461は左方の回転阻止位置へ移動したままであるため、第1開閉器39が閉状態から開状態となったにも関わらず、第2開閉器40は閉状態のままである。
【0125】
(11)第11動作例
図20は上記した操作ロッド21のコイルばね50の付勢方向への移動を許容する構造が、駆動カム415に形成されている例である。図20に示すように、ロック機構460によりアクチュエータ3の操作部405からの引抜操作が阻止された状態で、強引にアクチュエータ3の引抜操作が行われることにより、引抜操作の操作力がスイッチ本体400の破壊を招かない許容値を超えるときに、駆動カム415が破損することにより駆動カム415による操作ロッド21のスイッチ407側への押込み状態が解除されて、操作ロッド21のコイルばね50の付勢方向への移動が許容されるように構成されている。具体的には、駆動カム415の一部に切込みが形成されるなどして折れ易く加工されたりして、操作ロッド21の移動が許容されるようになっていることが望ましい。したがって、操作ロッド21がコイルばね50の付勢力により操作部405側に移動するため、可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。
【0126】
また、このとき、係止部材461は左方の回転阻止位置へ移動したままであるため、第1開閉器39が閉状態から開状態となったにも関わらず、第2開閉器40は閉状態のままである。
【0127】
(12)第12動作例
図21は上記した操作ロッド21のコイルばね50の付勢方向への移動を許容する構造が、操作部405とスイッチ部407との結合部分に形成されている例を示す図である。図21に示すように、ロック機構460によりアクチュエータ3の操作部405からの引抜操作が阻止された状態で、強引にアクチュエータ3の引抜操作が行われることにより、引抜操作の操作力がスイッチ本体400の破壊を招かない許容値を超えるときに、操作部405とスイッチ部407との結合状態が解除されて操作部405とスイッチ部407とが分離することにより、操作ロッド21のコイルばね50の付勢方向への移動が許容されるように構成されている。具体的構成は、上記第1実施形態の第2動作例で説明したものと同様であるのが望ましい。したがって、操作ロッド21がコイルばね50の付勢力により操作部405側に移動するため、可動接点39aは確実に固定接点39bから開離して第1開閉器39は開状態となる。
【0128】
また、このとき、係止部材461は左方の回転阻止位置へ移動したままであるため、第1開閉器39が閉状態から開状態となったにも関わらず、第2開閉器40は閉状態のままである。
【0129】
以上のように、本実施形態では、上記第3実施形態と同様の効果を奏することができるとともに以下の効果を奏することができる。すなわち、ロック機構460による駆動カム415の回転阻止状態のときに、強引にアクチュエータ3の引抜操作が行われるなどしても、操作ロッド21のコイルばね50の付勢方向への移動を許容する構造が破壊すれば、操作ロッド21がコイルばね50の付勢力により移動して、可動接点39aが固定接点39bから開離するように可動して第1開閉器39が開状態となるが、ロック機構460による駆動カム415の回転阻止状態は回転解除状態に切換わらないため、第2開閉器40の開閉状態は切換わらない。したがって、第2開閉器40の開閉状態が切換わらないのに、第1開閉器39の開閉状態のみが切換わることで、安全スイッチに何らかの異常が発生したことを確実に検出することができる。
【0130】
<構造の変形例>
次に、本発明の構造の変形例について図22ないし図24を参照して説明する。なお、以下においては上記した実施形態と同一の構成および動作については、同一および相当符号を引用してその構成および動作の詳細な説明を省略する。
【0131】
(a)第1変形例
図22はこの発明の構造の変形例を示す図であって、(a)は破壊する前の構造の側面から見た要部拡大図、(b)は破壊した後の構造の側面から見た要部拡大図である。図22(a)に示すように、上記した実施形態と同様に、回転軸513がこのケース部材(図示省略)の内面に支持されて、アクチュエータ3の操作部(図示省略)への挿入操作、操作部からの引抜操作に応じて両方向に回転するように駆動カム515が回転自在に操作部に設けられている。
【0132】
そして、図22(b)に示すように、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体(図示省略)の破壊を招かない許容値を超えるときに、回転軸513が屈曲することで駆動カム515がスイッチ部(図示省略)に対して上方に移動して、操作ロッド21のコイルばね50の付勢方向への移動が許容される。また、回転軸513は、一度、屈曲することにより破壊すれば、屈曲状態を維持するように構成されている。したがって、回転軸513が破壊すれば、駆動カム515が設計上の所定の位置からスイッチ部に対して上方に移動した状態が維持されるため、この状態でアクチュエータ3を挿入しても駆動カム515は正常に作動せず操作ロッド21の移動による可動接点39aの固定接点39bへの接触が阻止される。
【0133】
以上のように、この第1変形例では、回転軸513が、本発明の「可動接点の固定接点への接触を阻止する手段」として構成されている。
【0134】
(b)第2変形例
図23はこの発明の構造の変形例を示す図であって、(a)は破壊する前の構造の正面から見た要部拡大図、(b)は破壊した後の構造の正面から見た要部拡大図である。図23(a)に示すように、上記した実施形態と同様に、ケース部材611の内面に設けられた支持溝611aの2箇所に形成された支持突起611bに回転軸613が支持されて、アクチュエータ3の操作部(図示省略)への挿入操作、操作部からの引抜操作に応じて両方向に回転するように駆動カム615が回転自在に操作部に設けられている。
【0135】
また、支持溝611aの2箇所に形成された支持突起611bのそれぞれに対応して、ケース部材611には弾性変形可能に孔611cが形成されている。そして、図23(b)に示すように、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体(図示省略)の破壊を招かない許容値を超えるときに、ケース部材611に形成された孔611cが弾性変形または塑性変形することにより支持突起611bがそれぞれ外側に移動して、支持突起611bによる回転軸613の支持状態が解除される。これにより、駆動カム615がスイッチ部(図示省略)に対して上方に移動して、操作ロッド21のコイルばね50の付勢方向への移動が許容される。
【0136】
また、駆動カム615の上方への移動後に支持突起611bが元の位置に復帰することにより、元の位置に復帰した支持突起611bにより回転軸613は下方から支持される。したがって、回転軸613が一度上方に移動すれば、駆動カム615が設計上の所定の位置からスイッチ部に対して上方に移動した状態が維持されるため、この状態でアクチュエータ3を挿入しても駆動カム615は正常に作動せず操作ロッド21の移動による可動接点39aの固定接点39bへの接触が阻止される。
【0137】
以上のように、この第2変形例では、支持溝611a、支持突起611bおよび孔611cが本発明の「可動接点の固定接点への接触を阻止する手段」として構成されている。
【0138】
(c)第3変形例
図24はこの発明の構造の変形例を示す図であって、(a)は破壊する前の構造の正面から見た要部拡大図、(b)は破壊した後の構造の正面から見た要部拡大図である。図24(a)に示すように、上記した実施形態と同様に、ケース部材(図示省略)の内面に設けられた支持部に回転軸713が支持されて、アクチュエータ3の操作部(図示省略)への挿入操作、操作部からの引抜操作に応じて両方向に回転するように駆動カム715が回転自在に操作部に設けられている。
【0139】
また、この変形例では、駆動カム715には、回転軸713が挿通可能な大きさの上下に並んで設けられた2つの孔を連通して形成された支持孔715gが形成されいる。また、支持孔715gの、上側の孔と下側の孔との境界に橋絡片715hが駆動カム715と一体的に設けられており、これにより、上側の孔に回転軸713が支持されている。
【0140】
そして、図24(b)に示すように、アクチュエータ3の引抜操作の少なくとも操作力または操作回数がスイッチ本体(図示省略)の破壊を招かない許容値を超えるときに、駆動カム715の支持孔715gに設けられた橋絡片715hが破壊することにより、駆動カム715がスイッチ部(図示省略)に対して上方に移動して、操作ロッド21のコイルばね50の付勢方向への移動が許容される。また、駆動カム715がスイッチ部に対して移動した後は、回転軸713が支持孔715gの下側の孔により支持されると共に、この回転軸713の支持状態が維持されるように支持孔715gの大きさが形成されている。したがって、駆動カム715が一度上方に移動すれば、駆動カム715が設計上の所定の位置からスイッチ部に対して上方に移動した状態が維持されるため、この状態でアクチュエータ3を挿入しても駆動カム715は正常に作動せず操作ロッド21の移動による可動接点39aの固定接点39bへの接触が阻止される。
【0141】
以上のように、この第3変形例では、支持孔715gおよび橋絡片715hが本発明の「可動接点の固定接点への接触を阻止する手段」として構成されている。
【0142】
以上のように、第1ないし第3変形例によれば、操作ロッド21のコイルばね50の付勢方向への移動を許容する構造が破壊したときに、アクチュエータ3の挿入操作による駆動カム515,615,715の作動時の操作ロッド21の移動による可動接点39aの固定接点39bへの接触が阻止される。したがって、安全スイッチに何らかの異常が発生しているにも関わらず、アクチュエータ3の挿入操作が行われたときに第1開閉器39が閉状態に切換わるのを確実に防止できる。
【0143】
なお、第1ないし第3変形例における構造を上記した実施形態に適用してもよい。また、上記した実施形態において説明した構造を、第1ないし第3変形例における構造のように、破壊したときに、アクチュエータ3の挿入操作に連動した操作ロッド21の移動による可動接点39aの固定接点39bへの接触を阻止する構造としてもよい。
【0144】
<その他>
なお、本発明は上記実施形態に限定されるものではなく、その趣旨を逸脱しない限りにおいて上述したものに対して種々の変更を加えることが可能である。例えば、アクチュエータ3の付勢手段による付勢方向への移動を許容する構造としては、上記した例に限られず、操作ロッド21,210などの部品の一部に切込を形成したり、スイッチ本体1を構成するの部品の材質、大きさ、厚さ、太さなどを一部変更したりするなどして、操作ロッド21,210、駆動カム15,150,415,515,615,715、操作ロッド21,210と駆動カム15,150,415,515,615,715とを連結するカムピン22、その他の部品などの破壊強度を適切に設定することにより、これらの構造を、アクチュエータ3の付勢手段による付勢方向への移動を許容する構造としてもよい。
【0145】
また、上記実施形態では、コイルばね50,500が本発明の「付勢手段」として機能しているが、付勢手段の構成としては上記した構成に限定されない。要は、確実に可動接点39aを固定接点39bに対して開離する方向に付勢することのできる構成であればどのような構成であってもよい。例えば、磁石などを本発明の「付勢手段」として採用してもよい。
【0146】
また、上記した第1ないし第4実施形態では、1つの第1開閉器39を備える安全スイッチを例に挙げて説明したが、開閉器の数としてはこれに限定されるものではなく、2個以上設けてもよい。また、上記した第1ないし第3実施形態では、可動接点39aを固定接点39bに対して開離する方向へ付勢する付勢手段を有する第1開閉器39を備えた安全スイッチを例に挙げて説明したが、このような第1開閉器39に加えて、可動接点を固定接点に対して閉塞する方向へ付勢する付勢手段を有するとともに第1開閉器39と逆の開閉動作を行う第1開閉器を備える構成でもよい。この場合、第1開閉器39を外部装置の動作制御に使用して、新たな開閉器をアクチュエータの進入を検出するための電気信号を得るための開閉器とすればよい。
【0147】
このような構成とすれば、アクチュエータ3の操作部5への挿入操作に伴い第1開閉器39が閉状態となって、外部装置が操作不能状態から操作可能状態となる一方、新たな開閉器はアクチュエータ3の挿入操作に伴って開状態となる。このように、第1開閉器39と逆の開閉動作を行う開閉器の開閉状態をモニタすることにより、アクチュエータ3の挿入操作、引抜操作に加えて、外部装置の状態を外部から確認することができる。
【0148】
また、上記実施形態では、操作ロッド21,210のカムピン22がガイド孔15dを移動することで操作ロッド21,210が往復移動するように構成したが、連結手段を設けずに、操作ロッド21,210の先端部がカム曲線部15cに摺接することで操作ロッド21,210が往復移動する構成としてもよい。また、連結手段の構成としては上記した構成に限られず、操作ロッド21,210がコイルばね50,500などの付勢手段の付勢力に抗しつつ往復移動することのできる構成であればどのような構成であってもよい。
【0149】
また、上記第1ないし第4実施形態において、操作部5,405とスイッチ部7,407とが着脱自在に結合される構成でもよい。このような構成とすれば、必要に応じて操作部5,405をスイッチ部7,407から着脱できるので、スイッチ本体1,400のメンテナンスを容易に行うことができる。また、操作部5,405とスイッチ部7,407とが外れた場合には、コイルばね50,500などの付勢手段が可動接点39aを固定接点39bに対して開方向に付勢しているため第1開閉器39を確実に開状態とすることができる。また、操作部5,405とスイッチ部7,407とが一体的に結合された構成としてももちろんよい。なお、操作部5,405とスイッチ部7,407とが一体的に形成されたケース内に設けられているときは、ケースの操作部5,405とスイッチ部7,407との境目に切込などを形成して、アクチュエータ3の付勢方向への移動を許容する構造を構成してもよい。
【0150】
また、上記した実施形態において、コイルばね50,500を設けない構成としてもよい。このような構成とすれば、アクチュエータ3の操作部5,405からの引抜操作の操作力や操作回数が、スイッチ本体1の破壊を招かない許容値を超えることにより、操作ロッド21,210が破損した場合や、操作部5,405が破損したり脱落した場合であっても、操作ロッド21,210の引抜操作時における移動方向への移動、すなわち、操作ロッド21,210がスイッチ部7,407から引抜かれる方向への移動が許容されているため、アクチュエータ3の操作部5からの引抜力により駆動カム15,150,415とカムピン22により連結された操作ロッド21,210が確実に操作部5,405側へ移動するので、可動接点39aが固定接点39bから開離するように可動して第1開閉器39を確実に開状態とすることができ、安全性の向上を図ることができる。
【0151】
また、上記した第3実施形態では、係止部材61を駆動カム150に係止して駆動カム150の回転を阻止することにより、アクチュエータ3の引抜操作を阻止するロック機構60により本発明のロック手段を構成したが、ロック手段の構成としてはこれに限られるものではない。例えば、係止部材により操作ロッドを係止することにより、駆動カムの回転を阻止してアクチュエータの引抜操作を阻止するようにしてロック手段を構成してもよい。
【0152】
また、上記した第4実施形態では、1つの第2開閉器40を備える安全スイッチを例に挙げて説明したが、開閉器の数としてはこれに限定されるものではなく、2個以上設けてもよい。また、上記した第4実施形態では、可動接点40aを固定接点40bに対して閉塞する方向へ付勢するコイルばね463を有する第2開閉器40を備えた安全スイッチを例に挙げて説明したが、このような第2開閉器40に代えて、可動接点を固定接点に対して開離する方向へ付勢する付勢手段を有するとともに第2開閉器40と逆の開閉動作を行う開閉器を備える構成でもよい。
【0153】
また、上記した第4実施形態では、コイルばね463により係止部材461を回転阻止位置に移動し、ソレノイドなどにより構成された駆動部により係止部材461を回転許容位置に移動する構成としたが、駆動部により係止部材461を回転阻止位置に移動し、コイルばねなどの付勢手段により係止部材461を回転許容位置に移動する構成としてもよい。
【符号の説明】
【0154】
1,400…スイッチ本体
3…アクチュエータ
5,405…操作部
15,150,415,515,615,715…駆動カム
15c,415c…カム曲線部
15d,415d…ガイド孔(ガイド部)
7,407…スイッチ部
21,210…操作ロッド
22…カムピン(連結手段)
39…第1開閉器
39a…可動接点
39b…固定接点
40…第2開閉器
50,500…コイルばね(付勢手段)
60,460…ロック機構(ロック手段)
61,461…係止部材
【特許請求の範囲】
【請求項1】
外部からのアクチュエータの挿入操作、引抜操作に応じて作動する作動部材が設けられた操作部と、
可動接点および固定接点を有する第1開閉器が設けられたスイッチ部と、
前記可動接点を前記固定接点から開離する方向に付勢する付勢手段と、
前記作動部材の作動に連動し、前記挿入操作による前記作動部材の作動時に前記付勢手段の付勢力に抗しつつ移動して前記可動接点を可動させて前記固定接点に接触させ、前記引抜操作による前記作動部材の作動時に前記付勢手段の付勢力により移動して前記可動接点を前記挿入操作時とは逆方向に可動させて前記固定接点から開離させる操作ロッドとを備える安全スイッチにおいて、
破壊したときに、少なくとも前記操作ロッドの前記付勢手段の付勢方向への移動を許容する構造を備えることを特徴とする安全スイッチ。
【請求項2】
前記構造は、前記引抜操作の少なくとも操作力または操作回数が破壊を招かない許容値を超えるときに、少なくとも前記操作ロッドの前記付勢手段の付勢方向への移動を許容する請求項1に記載の安全スイッチ。
【請求項3】
前記作動部材は前記挿入操作および前記引抜操作に応じて両方向に回転する駆動カムであり、
前記操作ロッドは、前記駆動カムの回転に連動し、前記挿入操作による前記駆動カムの回転時に前記付勢手段の付勢力に抗しつつ移動して前記可動接点を可動させて前記固定接点に接触させ、前記引抜操作による前記駆動カムの回転時に前記付勢手段の付勢力により移動して前記可動接点を前記挿入操作時とは逆方向に可動させて前記固定接点から開離させる請求項1または2に記載の安全スイッチ。
【請求項4】
前記構造は、前記駆動カムを支持する支持部に形成されている請求項3に記載の安全スイッチ。
【請求項5】
前記スイッチ部は前記操作部に結合可能に形成され、前記構造は、前記操作部と前記スイッチ部との結合部分に形成されている請求項1ないし3のいずれかに記載の安全スイッチ。
【請求項6】
前記操作ロッドを前記駆動カムの回転に連動するように前記駆動カムに連結する連結手段をさらに備え、
前記駆動カムには、径大部と径小部とを有するカム曲線状のガイド部が形成され、
前記引抜操作による前記駆動カムの回転時に、前記連結手段が前記ガイド部に沿って前記径大部から前記径小部へ移動することに伴い、前記付勢手段による付勢力に加えて前記操作ロッドを移動させて前記第1開閉器を開状態に切換える請求項3ないし5のいずれかに記載の安全スイッチ。
【請求項7】
前記操作部には、
前記駆動カムの回転を阻止する係止部材を有し、
前記アクチュエータが前記操作部へ挿入されているときに、前記係止部材により前記駆動カムの回転を阻止することにより、前記引抜操作を阻止するロック手段がさらに設けられている請求項3ないし6のいずれかに記載の安全スイッチ。
【請求項8】
前記ロック手段による前記駆動カムの回転阻止状態と回転許容状態との間の切換えに応じて開閉状態が切換わる第2開閉器をさらに備える請求項7に記載の安全スイッチ。
【請求項9】
前記構造は、破壊したときに、前記挿入操作による前記作動部材の作動時の前記操作ロッドの移動による前記可動接点の前記固定接点への接触を阻止する手段を備える請求項1ないし8のいずれかに記載の安全スイッチ。
【請求項10】
外部からのアクチュエータの挿入操作、引抜操作に応じて両方向に回転し、径大部と径小部を有するカム曲線状のガイド部が形成された駆動カムが設けられた操作部と、
可動接点および固定接点を有する第1開閉器が設けられたスイッチ部と、
前記駆動カムの回転に連動して前記操作部と前記スイッチ部との間を往復移動する操作ロッドと、
前記操作ロッドを前記駆動カムの回転に連動するように前記駆動カムに連結する連結手段とを備え、
前記挿入操作による前記駆動カムの回転時に前記連結手段が前記ガイド部に沿って前記径小部から前記径大部へ移動するのに前記操作ロッドが連動して前記可動接点を可動させて前記固定接点に接触させ、前記引抜操作による前記駆動カムの回転時に前記連結手段が前記ガイド部に沿って前記径大部から前記径小部へ移動するのに前記操作ロッドが連動して前記可動接点を前記挿入操作時とは逆方向に可動させて前記固定接点から開離させる安全スイッチにおいて、
破壊したときに、少なくとも前記操作ロッドの前記引抜操作時における移動方向への移動を許容する構造を備えることを特徴とする安全スイッチ。
【請求項1】
外部からのアクチュエータの挿入操作、引抜操作に応じて作動する作動部材が設けられた操作部と、
可動接点および固定接点を有する第1開閉器が設けられたスイッチ部と、
前記可動接点を前記固定接点から開離する方向に付勢する付勢手段と、
前記作動部材の作動に連動し、前記挿入操作による前記作動部材の作動時に前記付勢手段の付勢力に抗しつつ移動して前記可動接点を可動させて前記固定接点に接触させ、前記引抜操作による前記作動部材の作動時に前記付勢手段の付勢力により移動して前記可動接点を前記挿入操作時とは逆方向に可動させて前記固定接点から開離させる操作ロッドとを備える安全スイッチにおいて、
破壊したときに、少なくとも前記操作ロッドの前記付勢手段の付勢方向への移動を許容する構造を備えることを特徴とする安全スイッチ。
【請求項2】
前記構造は、前記引抜操作の少なくとも操作力または操作回数が破壊を招かない許容値を超えるときに、少なくとも前記操作ロッドの前記付勢手段の付勢方向への移動を許容する請求項1に記載の安全スイッチ。
【請求項3】
前記作動部材は前記挿入操作および前記引抜操作に応じて両方向に回転する駆動カムであり、
前記操作ロッドは、前記駆動カムの回転に連動し、前記挿入操作による前記駆動カムの回転時に前記付勢手段の付勢力に抗しつつ移動して前記可動接点を可動させて前記固定接点に接触させ、前記引抜操作による前記駆動カムの回転時に前記付勢手段の付勢力により移動して前記可動接点を前記挿入操作時とは逆方向に可動させて前記固定接点から開離させる請求項1または2に記載の安全スイッチ。
【請求項4】
前記構造は、前記駆動カムを支持する支持部に形成されている請求項3に記載の安全スイッチ。
【請求項5】
前記スイッチ部は前記操作部に結合可能に形成され、前記構造は、前記操作部と前記スイッチ部との結合部分に形成されている請求項1ないし3のいずれかに記載の安全スイッチ。
【請求項6】
前記操作ロッドを前記駆動カムの回転に連動するように前記駆動カムに連結する連結手段をさらに備え、
前記駆動カムには、径大部と径小部とを有するカム曲線状のガイド部が形成され、
前記引抜操作による前記駆動カムの回転時に、前記連結手段が前記ガイド部に沿って前記径大部から前記径小部へ移動することに伴い、前記付勢手段による付勢力に加えて前記操作ロッドを移動させて前記第1開閉器を開状態に切換える請求項3ないし5のいずれかに記載の安全スイッチ。
【請求項7】
前記操作部には、
前記駆動カムの回転を阻止する係止部材を有し、
前記アクチュエータが前記操作部へ挿入されているときに、前記係止部材により前記駆動カムの回転を阻止することにより、前記引抜操作を阻止するロック手段がさらに設けられている請求項3ないし6のいずれかに記載の安全スイッチ。
【請求項8】
前記ロック手段による前記駆動カムの回転阻止状態と回転許容状態との間の切換えに応じて開閉状態が切換わる第2開閉器をさらに備える請求項7に記載の安全スイッチ。
【請求項9】
前記構造は、破壊したときに、前記挿入操作による前記作動部材の作動時の前記操作ロッドの移動による前記可動接点の前記固定接点への接触を阻止する手段を備える請求項1ないし8のいずれかに記載の安全スイッチ。
【請求項10】
外部からのアクチュエータの挿入操作、引抜操作に応じて両方向に回転し、径大部と径小部を有するカム曲線状のガイド部が形成された駆動カムが設けられた操作部と、
可動接点および固定接点を有する第1開閉器が設けられたスイッチ部と、
前記駆動カムの回転に連動して前記操作部と前記スイッチ部との間を往復移動する操作ロッドと、
前記操作ロッドを前記駆動カムの回転に連動するように前記駆動カムに連結する連結手段とを備え、
前記挿入操作による前記駆動カムの回転時に前記連結手段が前記ガイド部に沿って前記径小部から前記径大部へ移動するのに前記操作ロッドが連動して前記可動接点を可動させて前記固定接点に接触させ、前記引抜操作による前記駆動カムの回転時に前記連結手段が前記ガイド部に沿って前記径大部から前記径小部へ移動するのに前記操作ロッドが連動して前記可動接点を前記挿入操作時とは逆方向に可動させて前記固定接点から開離させる安全スイッチにおいて、
破壊したときに、少なくとも前記操作ロッドの前記引抜操作時における移動方向への移動を許容する構造を備えることを特徴とする安全スイッチ。
【図1】


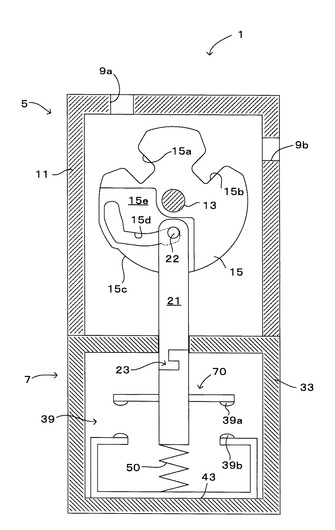
【図2】
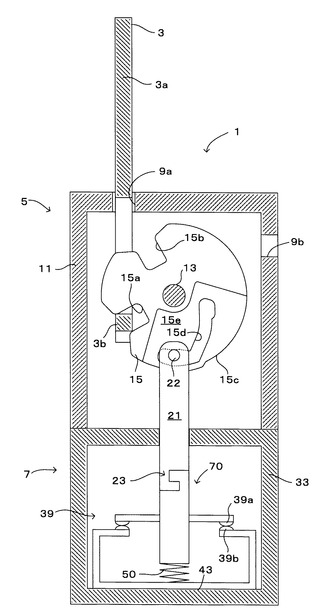
【図3】
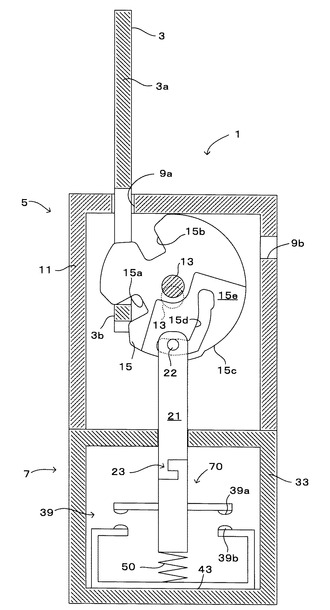
【図4】
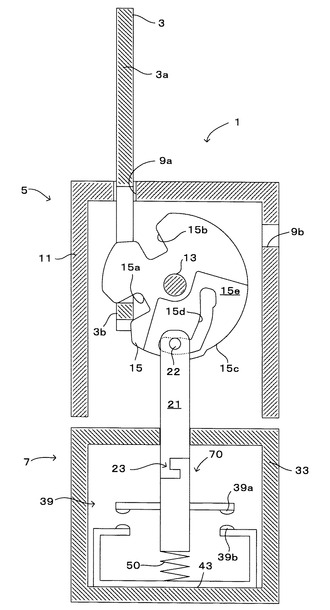
【図5】
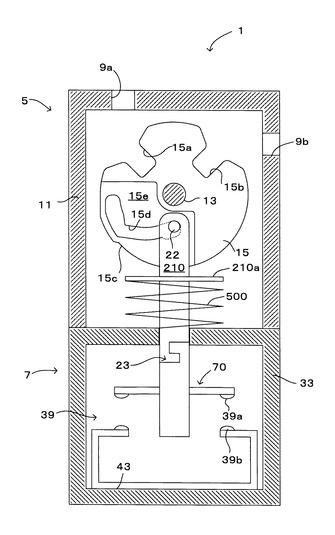
【図6】
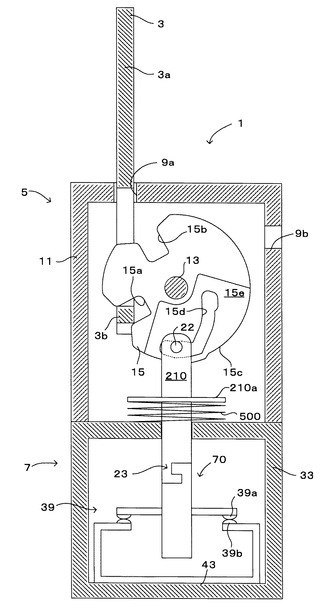
【図7】
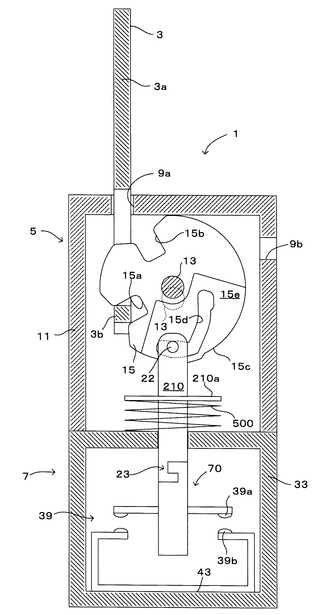
【図8】
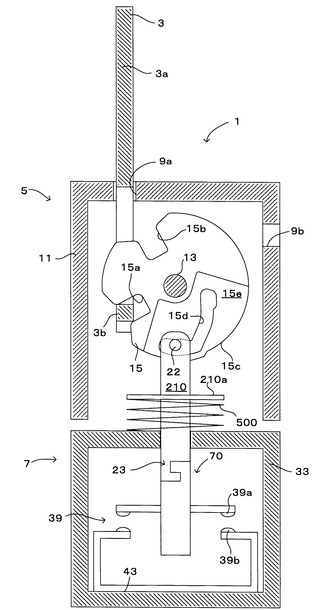
【図9】
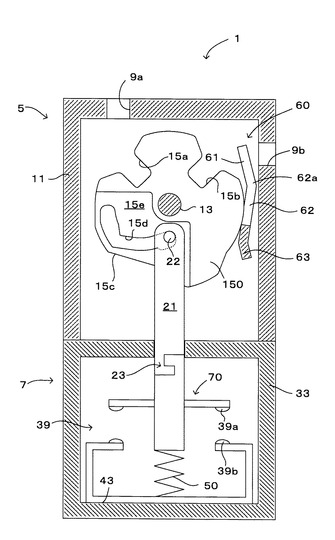
【図10】
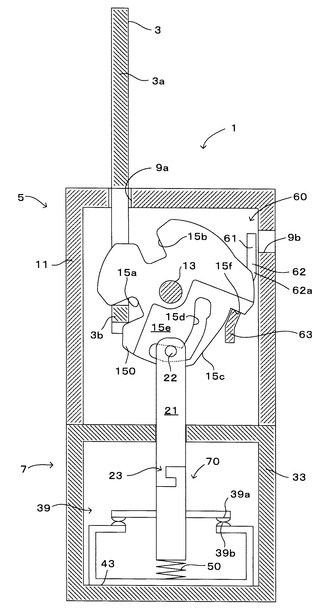
【図11】
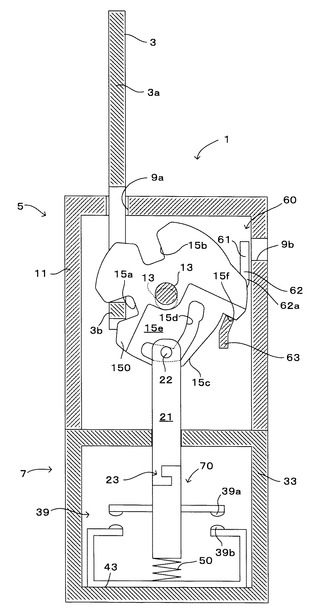
【図12】
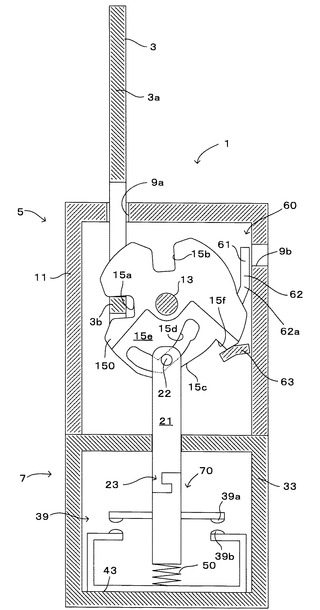
【図13】
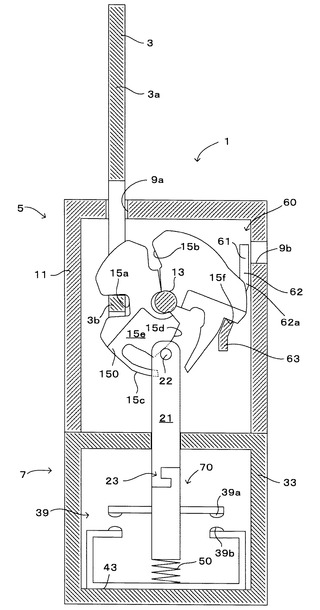
【図14】
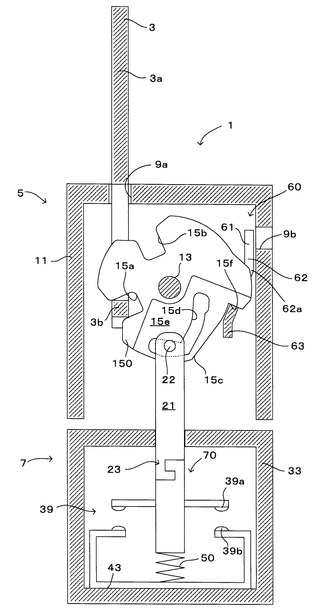
【図15】
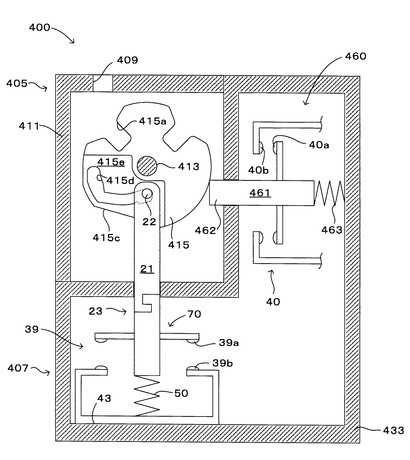
【図16】
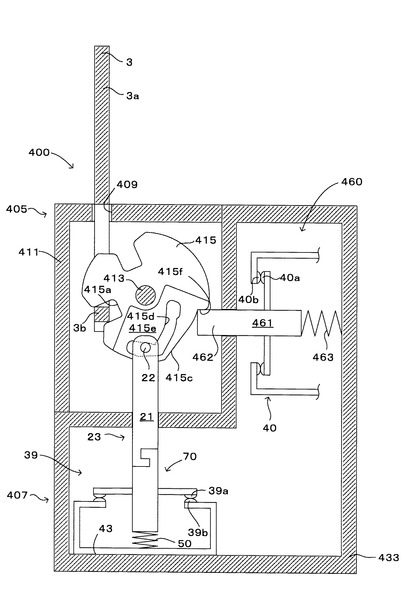
【図17】
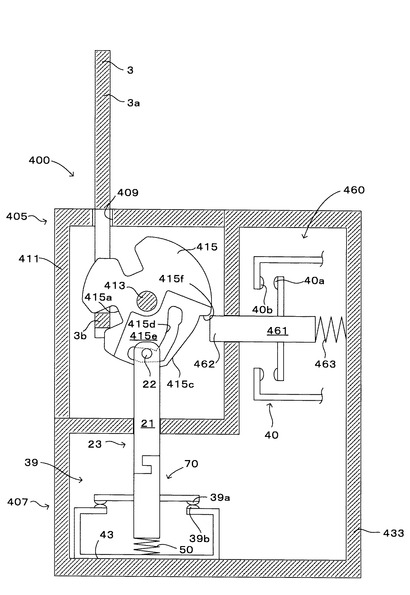
【図18】
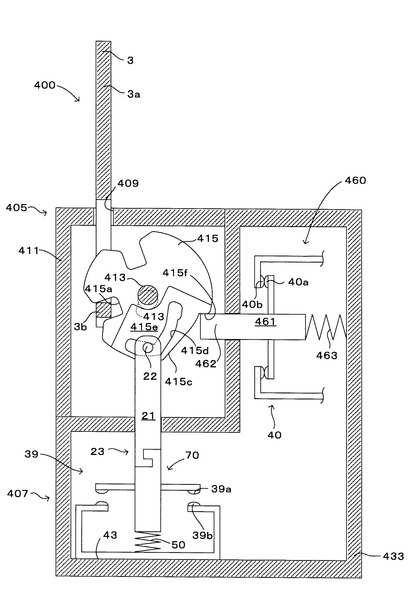
【図19】
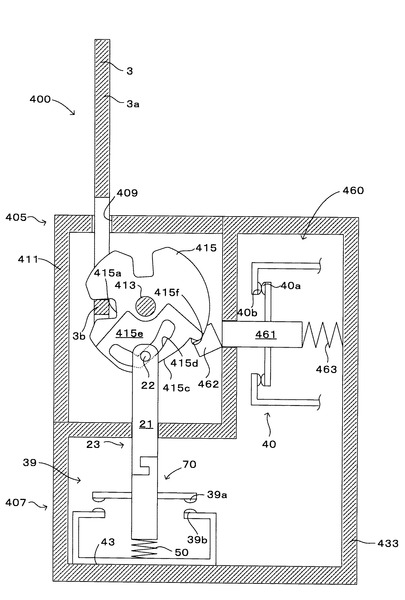
【図20】
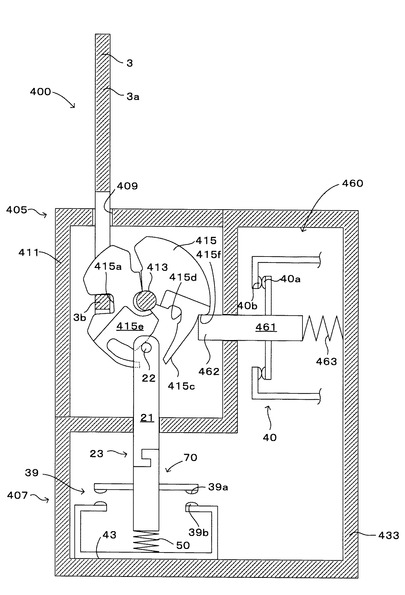
【図21】
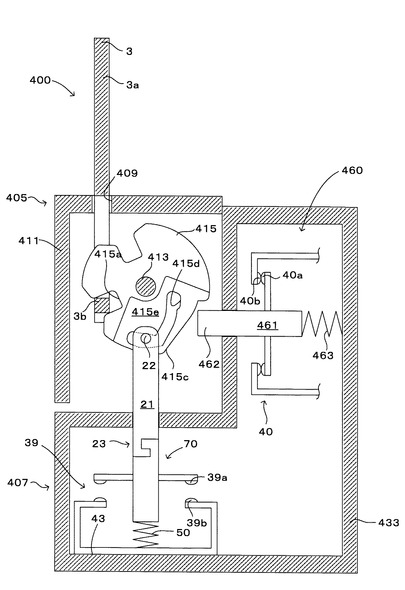
【図22】
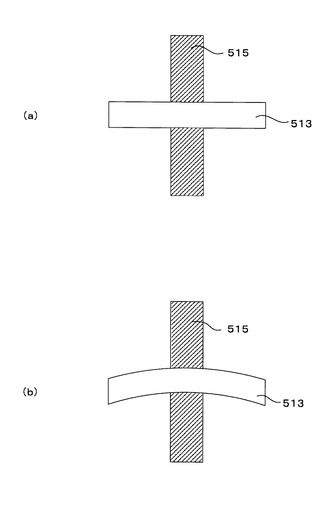
【図23】
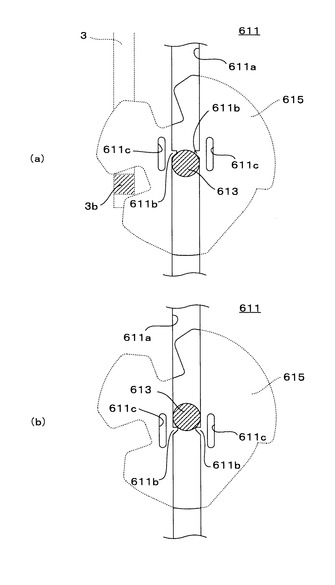
【図24】
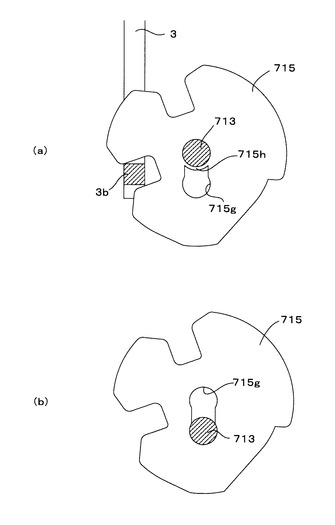
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【公開番号】特開2010−157488(P2010−157488A)
【公開日】平成22年7月15日(2010.7.15)
【国際特許分類】
【出願番号】特願2009−216698(P2009−216698)
【出願日】平成21年9月18日(2009.9.18)
【出願人】(000000309)IDEC株式会社 (188)
【公開日】平成22年7月15日(2010.7.15)
【国際特許分類】
【出願日】平成21年9月18日(2009.9.18)
【出願人】(000000309)IDEC株式会社 (188)
[ Back to top ]