
安全光電スイッチ
【課題】複数の保護領域を設定してこれを切り替えるのと実質的に同様の作業効率を確保しつつ、ユーザにとって簡便な設定作業にする。
【解決手段】保護領域がゲート(100)の開口の全域に設定されている。低位、中位、高位の高さの異なる位置に配設したセンサ(121〜123)が全て入光した場合には、高さの低いワーク(W)であるとして、比較的高さの低い第1のミューティングエリア(98(低))或いは実質的にミューティングエリアが存在しない第1のミューティングエリア(98(低))が設定される。低位センサ(12)がワーク(W)と干渉して遮光した場合には、中位センサ(122)の配設高さよりも低いワーク(W)であるとして、高さが中程度の第2のミューティングエリア(98(中))が設定される。
【解決手段】保護領域がゲート(100)の開口の全域に設定されている。低位、中位、高位の高さの異なる位置に配設したセンサ(121〜123)が全て入光した場合には、高さの低いワーク(W)であるとして、比較的高さの低い第1のミューティングエリア(98(低))或いは実質的にミューティングエリアが存在しない第1のミューティングエリア(98(低))が設定される。低位センサ(12)がワーク(W)と干渉して遮光した場合には、中位センサ(122)の配設高さよりも低いワーク(W)であるとして、高さが中程度の第2のミューティングエリア(98(中))が設定される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は安全光電スイッチに関する。
【背景技術】
【0002】
特許文献1、2に見られるように、光を二次元的に走査して物体を検出すると共にこの物体の位置を検出する光走査型光電スイッチが知られている。この光走査型光電スイッチは、安全スキャナ、セーフティレーザスキャナ等とも呼ばれている通り、危険源としての機械やロボットなどの周囲に保護領域を設けて、この保護領域に作業者等が侵入したときに、危険源に動作不許可の安全信号を出力する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平4−310890号公報
【特許文献2】特開03−175390号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
光走査型光電スイッチは、上述したように、物体の位置を検出することで、ユーザが設定した保護領域に物体が侵入したか否かを検知するものである。この保護領域の設定に関して、予め複数の保護領域を設定しておき、これを外部入力に基づいて保護領域を切り替えることが行われている。
【0005】
すなわち、一つの保護領域に固定すると、危険源にワークを受け渡すために作業者が保護領域に入るたび毎に危険源である機械の動作が光走査型光電スイッチの安全出力に基づいて停止されてしまい、このことによって作業効率が低下してしまう。この問題に対処するために複数の保護領域を予め設定しておき、上記の例であれば、作業者がワークの受け渡しを行うときには、作業者の侵入を許容する保護領域に切替え、作業者が離れている最中には別の保護領域に切り替えることができる。
【0006】
保護領域の設定は、ユーザの手で行われるものであるが、保護領域を規定する作業は容易ではなく、また、ユーザが保護領域を設定した後に意図通りの保護領域が間違いなく設定されているか否かを実際に確認する必要があるため、ユーザが複数の保護領域を設定する、その設定作業及びこれに付随する確認作業が繁雑であり、また、正確性が要求される。
【0007】
本発明の目的は、複数の保護領域を設定してこれを切り替えるのと実質的に同様の作業効率を確保しつつ、ユーザにとって簡便な設定作業で足りる光走査型光電スイッチ及び領域設定方法並びに領域設定プログラムを提供することにある。
【課題を解決するための手段】
【0008】
上記の技術的課題は、一つの観点によれば、本発明の基本概念を示す図56を参照して、
光を二次元的に走査して物体を検出すると共に該物体までの距離を計測して該物体の二次元位置を検知し、該物体の二次元位置が、予め設定された保護領域内であるときに物体の存在有りの判定を行って、安全信号の出力を制御する出力制御部から安全信号を出力する光走査型光電スイッチにおいて、
前記保護領域と、該保護領域の領域内に設定される付加機能エリアと、該付加機能エリアに設定される付加機能を実行する成立条件とを記憶した記憶手段と、
外部入力を受け付ける受付端子と、
該受付端子で受け取った前記外部入力に基づいて、該外部入力が前記記憶手段に記憶されている成立条件を満すときに前記付加機能を実行する付加機能実行信号を前記出力制御部に供給する付加機能実行信号生成部と、を有し、
前記外部入力に基づいて、前記保護領域に含まれる前記付加機能エリアの付加機能によって前記安全信号の出力が制御されることを特徴とする光走査型光電スイッチを提供することにより達成される。ここに、付加機能の典型例が、付加機能エリア内に物体を検知しても、この物体の検知を一時的に無効化するミューティング機能である。
【0009】
上記の技術的課題は、本発明の他の観点によれば、
上記の本発明の光走査型光電スイッチと、該光走査型光電スイッチの設定を行うプログラムを実行可能なパーソナルコンピュータとからなる光電スイッチ設定装置を使って前記追加機能エリアを設定する領域設定方法であって、
前記パーソナルコンピュータのディスプレイに表示された設定画面に、前記光走査型光電スイッチのシンボルと共に表示される保護領域を第1の色で表示する保護領域表示工程と、
前記設定画面に表示の保護領域に重畳して、ユーザが指定したエリアを表示する指定エリアを前記第1の色とは異なる第2の色で重畳表示する指定エリア表示工程と、
ユーザが指定した前記指定エリアをユーザが確認して確認の入力をすることで、前記保護領域と前記ユーザが指定したエリアとがオーバーラップするエリアを付加機能エリアとして設定する付加機能エリア設定工程と、
該付加機能エリア設定工程の次に、前記保護領域からはみ出した前記指定エリアを削除して、前記保護領域と前記ユーザが指定したエリアとがオーバーラップするエリアを付加機能エリアとして前記保護領域に重畳表示すると共に、該付加機能エリアを前記保護エリアの前記第1の色とは異なる色で表示する付加機能エリア表示工程とを有する光走査型光電スイッチの領域設定方法を提供することにより達成される。
【0010】
上記の技術的課題は、本発明の別の観点によれば、
光を二次元的に走査して物体を検出すると共に該物体までの距離を計測して該物体の二次元位置を検知し、該物体の二次元位置が、予め設定された保護領域内であるときに物体の存在有りの判定を行って安全信号の出力を制御する出力制御部から安全信号を出力する光走査型光電スイッチにおいて、
前記保護領域と、該保護領域の領域内に設定され且つ物体を検知してもこの物体の検知を一時的に無効化するミューティング機能が設定されたミューティングエリアと、該ミューティングエリアのミューティング機能を実行する成立条件とを記憶した記憶手段と、
外部入力を受け付ける受付端子と、
該受付端子で受け取った前記外部入力に基づいて、該外部入力が前記記憶手段に記憶されている成立条件を満すときに前記ミューティング機能を実行するミューティング機能実行信号を前記出力制御部に供給するミューティング機能実行信号生成部と、を有し、
前記外部入力に基づいて、前記保護領域に含まれる前記ミューティングエリアのミューティング機能によって前記安全信号の出力が制御されることを特徴とする光走査型光電スイッチに接続された外部パーソナルコンピュータを使って前記ミューティングエリアを設定するためのプログラムであって、
前記パーソナルコンピュータのディスプレイに設定画面を表示して、該設定画面に前記光走査型光電スイッチのシンボルと共に表示される保護領域を第1の色で表示する保護領域表示手順と、
前記設定画面に表示の保護領域に重畳して、ユーザが指定したエリアを表示する指定エリアを前記第1の色とは異なる第2の色で重畳表示する指定エリア表示手順と、
ユーザが指定した前記指定エリアをユーザが確認して確認の入力をすることで、前記保護領域と前記ユーザが指定したエリアとがオーバーラップするエリアを付加機能エリアとして設定する付加機能エリア設定手順と、
該付加機能エリア設定工程の次に、前記保護領域からはみ出した前記指定エリアを削除して、前記保護領域と前記ユーザが指定したエリアとがオーバーラップするエリアを付加機能エリアとして前記保護領域に重畳表示すると共に、該付加機能エリアを前記保護エリアの前記第1の色とは異なる色で表示する付加機能エリア表示手順を前記外部コンピュータに実行させるためのプログラムを提供することにより達成される。
【0011】
本発明の他の目的及びその作用効果は、本発明の実施例の詳しい説明から明らかになろう。
【図面の簡単な説明】
【0012】
【図1】光走査型光電スイッチの基本的な用語を説明するための図である。
【図2】本発明に関連した光走査型光電スイッチの適用例を説明するための図である。
【図3】本発明に関連した光走査型光電スイッチの光学系の構成を説明するための図である。
【図4】図4の(a)は図3の光走査型光電スイッチの全体構成を示し、図4の(b)は保護領域と警告領域を説明するための図である。
【図5】本発明に関連した光走査型光電スイッチの外観図である。
【図6】図6の(a)は本発明に関連した光走査型光電スイッチの正面図であり、図6の(b)はユーザインターフェース部を抽出してユーザ側から見た図である。
【図7】本発明に関連した光走査型光電スイッチの内部構造を説明するための縦断面図である。
【図8】図5に関連した図であり、光走査型光電スイッチから投光窓を形成する光透過カバーを取り外した図である。
【図9】本発明に関連した光走査型光電スイッチの内部構造を構成する装置本体の斜視図であり、走査ミラーが測定領域とは反対側に向いている状態を示す図である。
【図10】図9の装置本体の断面図である。
【図11】光走査型光電スイッチに内蔵した基準対象物として白と黒の2種類の反射率の異なる反射面の平面図である。
【図12】図11の基準対象物の2つの反射面にレーザパルス光を投光した状態を示す図である。
【図13】保護領域や警告領域を設定するためのプログラムをインストールしたパーソナルコンピュータを接続した光走査型光電スイッチを示す図である。
【図14】保護領域を設定する機能ブロック図である。
【図15】パーソナルコンピュータのディスプレイに表示される領域設定画面である。
【図16】保護領域を設定する工程を説明するための図である。
【図17】保護領域を設定する他の工程を説明するための図である。
【図18】ミューティングエリアを設定するのに際して、先ず、保護領域を設定するときの領域設定画面である。
【図19】図18で設定した保護領域にミューティングエリアを設定する中間工程における領域設定画面である。
【図20】ミューティングエリアが設定された保護領域を説明するための図である。
【図21】ミューティングエリアに各種の機能及びミューティング時間などを設定するためのミューティング設定画面である。
【図22】光走査型光電スイッチにミューティングエリアを設定した搬送システムの全体構成図である。
【図23】ミューティング機能に関連した光走査型光電スイッチの機能ブロック図である。
【図24】複数のミュートセンサとワークとの関係を説明するための図である。
【図25】図24に続いて、複数のミュートセンサとワークとの関係を説明するための図である。
【図26】ミューティングに関係したタイムチャートである。
【図27】ミューティングエリアを複数設定し、ワークの種類に応じてミューティングエリアの切り替え制御を行うゲート構成を説明するための図である。
【図28】図27に関連して、比較的高さの低いワークがゲートを通過するときに比較的高さの低いミューティングエリアが設定されることを説明するための図である。
【図29】図27に関連して、比較的高さの高いワークがゲートを通過するときに比較的高さの高いミューティングエリアに切替えられることを説明するための図である。
【図30】ゲートにワークの高さを検出するために三段階に設置高さの異なるセンサを用意し、このセンサによって検出したワークの高さに基づいてミューティングエリアを切り替えるゲート構成を説明するための図である。
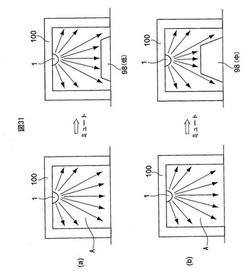
【図31】図30に関連して、図31の(a)は高さの低いワークを検出したときに、この低いワークに対応した高さの低いミューティングエリアが設定されることを説明する図であり、図31の(b)は中程度の高さのワークを検出したときに、この中程度の高さのワークに対応した中程度の高さのミューティングエリアが設定されることを説明する図である。
【図32】図30、図31に関連して、図32の(c)は高さの高いワークを検出したときに、この高さの高いワークに対応した高さの高いミューティングエリアが設定されることを説明する図であり、図32の(d)は相対的に一番高さの高いワークを検出したときに、この非常に高いワークに対応した非常に高いミューティングエリアが設定されることを説明する図である。
【図33】走行台車に光走査型光電スイッチを設置して、走行台車が走行している通路に応じて保護領域を切り替える例を説明するための図である。
【図34】複数系統の出力を備えた光走査型光電スイッチの適用例を説明するための図である。
【図35】図34に関連して2系統の出力を備えた光走査型光電スイッチの動作を説明するためのブロック図である。
【図36】複数の系統の出力に安全信号に検査信号を重畳するときに、検査信号に位相を設ける例を説明するためのタイムチャートである。
【図37】隣接した2つの光走査型光電スイッチ間で干渉の問題が発生し易いことを説明するための図である。
【図38】2つの光走査型光電スイッチ間で干渉が発生したときの投光パルスのタイムチャートである。
【図39】光走査型光電スイッチの走査ミラーが回転することにより放射状にレーザ光を投光する様子を説明するための図である。
【図40】投光パルスの投光周期を説明するための図である。
【図41】走査ミラーの回転周期つまりスキャン周期を説明するための図である。
【図42】隣接する光走査型光電スイッチにおいて投光周期を異ならせることで干渉を防止する制御例を説明するための図である。
【図43】本発明に関連した光走査型光電スイッチの基本構成をブロック図的に示す図である。
【図44】複数の光走査型光電スイッチを相互に接続して投光タイミングに位相を設けることで干渉を防止する制御例を説明するための図である。
【図45】隣接する光走査型光電スイッチにおいて干渉を検知したときに投光タイミングに位相を設ける制御例を説明するための図である。
【図46】本発明が適用された光走査型光電スイッチにユーザインターフェース部に設置した液晶表示部の表示モードの変化を説明するための図である。
【図47】図46のモニタモードでの表示の変遷を説明するための図である。
【図48】図46の設定モードでの表示の変遷を説明するための図である。
【図49】光走査型光電スイッチに接続したディスプレイ付き端末であるパーソナルコンピュータを使って外乱光の発生方位をパーソナルコンピュータのディスプレイに表示できることを説明するための図である。
【図50】外乱光によるエラーを光走査型光電スイッチの液晶表示部に表示されることを説明するための図である。
【図51】外乱検知の具体的な手法を説明するためのフローチャートである。
【図52】外乱の方位を指し示すインジケータを光走査型光電スイッチに設置した例を示す図である。
【図53】光走査型光電スイッチに内蔵した基準対象物を使って検出感度を自律的に維持し、また、基準対象物などの汚れを光走査型光電スイッチの故障とみなすときに必要とされる基準受光強度を工場出荷の際にメモリに記憶させる手順を説明するためのフローチャートである。
【図54】図53の手順でメモリに記憶した基準受光強度を使って光走査型光電スイッチの検出感度を自律的に維持するための処理手順を説明するためのフローチャートである。
【図55】光走査型光電スイッチに内蔵した基準対象物の汚れなどが発生したときに、これを図53の手順でメモリに記憶した基準受光強度を使って検出して光走査型光電スイッチを安全状態に移行させる処理手順を説明するためのフローチャートである。
【図56】本発明の基本概念図である。
【発明を実施するための形態】
【実施例】
【0013】
図1を参照して、一般論として、光走査型光電スイッチの基本的な用語である「測定領域」「最大保護領域」「警告領域」「保護領域」を説明する。「最大保護領域」とは、光走査型光電スイッチが安全規格に規定された低反射率物体から高反射率物体まで様々な反射率の物体を検出可能な領域をいう。「測定領域」とは、光走査型光電スイッチが標準的な反射率を備えた物体を検出可能な領域をいい、この「測定領域」は「最大保護領域」を完全に包含する。
【0014】
光走査型光電スイッチは、既知のようにレーザ光などの光により最大保護領域を二次元的に走査し、最大保護領域から反射された走査光をモニタすることでエリア内の安全を監視するのに用いられる。
【0015】
上記の「測定領域」「最大保護領域」は各光走査型光電スイッチの固有のものであり、ユーザが設定できるエリアではない。これに対して、「保護領域」「警告領域」はユーザが設定可能な領域であり、「保護領域」は「最大保護領域」内にだけ設定可能である。これに対して「警告領域」は「測定領域」内に設定可能である。
【0016】
図2を参照して、本発明が適用された光走査型光電スイッチ1の最大保護領域は約4メートルの半径距離の領域であり、上述したように、この約4メートルの半径距離の最大保護領域内に限定してユーザが「保護領域」を設定することができる。
【0017】
「保護領域」は、機械(例えばロボット)の起動や動作を停止するための安全出力と対応付けられており、例えば作業者がこの「保護領域」に侵入したときには光走査型光電スイッチ1は動作不許可を示す安全出力つまりOFF状態の出力を機械に供給する。
【0018】
「警告領域」は、安全出力とは対応付けられておらず機械に接近しているとして警告を発する非安全出力(通常の出力)と対応付けられている。また、この光走査型光電スイッチ1のスキャン角は最大270°であり、光走査型光電スイッチ1の後方エリアまで保護領域及び警告領域を設定することができる。
【0019】
図2の例では、ロボット2の作業領域及び搬送装置が設置された領域が防護柵3で仕切られており、この防護柵3で規定される領域においてロボット2の作業エリアに隣接するエリアが保護領域Aとして設定され、この保護領域Aの監視のために光走査型光電スイッチ1が設置されている。保護領域Aに例えば作業者Mが侵入すると直ちに光走査型光電スイッチ1によって検知される。なお、図2に図示の保護領域Aは、比較的検出能力が低い保護領域A(低)と、検出能力が比較的高い保護領域A(高)とが用意されている。この検出能力の異なる2種類の保護領域A(低)、A(高)に関しては後に説明する複数の出力系統を光走査型光電スイッチ1が備えている場合に効果的である。
【0020】
図3は、光走査型光電スイッチ1の光学系の基本構造を説明するための図である。この図3を参照して光走査型光電スイッチ1の光学系の要素を説明する。
【0021】
光路:
光走査型光電スイッチ1は、赤外線領域に含まれる波長のレーザ光によって検出が実行される。光走査型光電スイッチ1は、レーザ光を水平面上で所定のピッチで走査し、その反射光を受け取ることで侵入者や物体Mの検出を行う。
【0022】
光照射手段:
図3において参照符号LDは投光素子を示す。投光素子LDが出射したレーザ光L1は、投光レンズ10を通り、投光用の第1、第2ミラー(反射鏡)11、12により偏向されて、所定の垂直の第1軸線Zに沿った方向において下方に向けて進む。したがって、投光レンズ10、投光用の第1および第2ミラー11、12は垂直の第1軸線Zに沿ってレーザ光L1を照射する光照射手段を構成している。投光素子LDは、一定の周期で断続的にパルス状のレーザ光L1を出射し、このレーザ光は0.36°毎に投光素子LDから出射される。なお、当業者であれば以下の説明から理解できる通り、光走査型光電スイッチ1の検出原理は光のコヒーレント性などレーザ光特有の性質を利用するものではない。したがって、光走査型光電スイッチ1の投光源としてのレーザ光源は一例に過ぎず、このレーザ光源に限定されることなく種々の光源を採用してもよいことは言うまでもない。ところで、レーザダイオードは高輝度の点光源であり、パルス発光の際に高速応答性に優れている。したがって、光走査型光電スイッチ1の光源として、レーザダイオードを好適に採用することができる。
【0023】
光走査手段14;
上記の投光用第2ミラー12によって垂直の第1軸線Zに沿った方向に偏向されたレーザ光L1は、第2ミラー12の下方に位置する光走査手段14に向って進む。光走査手段14は、垂直第1軸線Zに対して略45°傾斜した状態で配設された走査ミラーで構成されている。この走査ミラー14は、垂直の第1軸線Zを中心に回転駆動される。光走査手段(走査ミラー)14は、図3では図示を省略したモータ24(図7)によって回転駆動される。垂直の第1軸線Zを中心とする走査ミラー14の回転動作によって、図4(b)の破線で示すように、レーザ光L1は垂直の第1軸線Zに直交する水平面上を走査する。図4(b)に示す参照符号Aは、例示的に設定した「保護領域」であり、Bは「最大保護領域」である。
【0024】
なお、走査ミラー14は図示の例では、投光及び受光で兼用する共通の軸回転ミラーで構成されているが、変形例として、投光と受光とを個別の走査ミラーで構成し、投光用走査ミラーと受光用走査ミラーとを同軸に配設すると共に投光用走査ミラーと受光用走査ミラーとが同じ方位に向くよう配設し、そして、これらの走査ミラーを同期して回転させる構成を採用してもよい。
【0025】
受光反射体21、光電変換素子22;
警告領域や保護領域Aに物体Mが存在すると、この物体Mで反射した反射光L2が光走査型光電スイッチ1に入力され、この反射光L2は、走査ミラー14で反射された後に受光レンズ20によって集光される(図3)。受光レンズ20は、垂直の第1軸線Zと一致する光軸を有しており、受光レンズ20によって集光された反射光L2は受光反射体21によって偏向されて、受光素子としての光電変換素子22に集光される。
【0026】
図3を引き続き参照して、受光反射体21は、垂直の第1軸線Zに対して略45°傾斜して配設されており、この受光反射体21によって、受光レンズ20により集光した反射光L2の光軸は、垂直の第1軸線Zに対して略直交する横方向の第2軸線Yに沿った方向に偏向し、この偏向後の反射光L2が光電変換素子22によって受光される。光電変換素子22は、反射光L2を受光すると光電変換して受光信号を生成する。
【0027】
図4の(a)を参照して、光走査型光電スイッチ1は、CPUやメモリを含むマイクロコンピュータやFPGA等で構成される制御手段30を有している。図4の(a)は、光走査型光電スイッチ1の全体系統をブロック図的に示してある。投光素子LDは制御手段30によって制御され、また、光電変換素子22の信号は制御手段30に入力される。
【0028】
光走査型光電スイッチ1の外観構成:
図5を参照して、光走査型光電スイッチ1は、その上端部の前面に傾斜して位置するユーザインターフェース部32を有している。ユーザインターフェース部32を傾斜して配置することにより、ユーザインターフェース部32の面積を拡大することができると共に、ユーザにとってもアクセスが容易となる。
【0029】
傾斜したインターフェース部32には、その中央部分に、矩形の液晶表示部34が設けられ、この液晶表示部34の一側及び下方に、複数のプッシュ式の操作ボタン36が配設されている。また、液晶表示部34の他側には、横二列で上下に離間して複数のLEDインジケータ38が配設され、この複数のLEDインジケータ38によって光走査型光電スイッチ1の動作状態が表示される。
【0030】
図6(b)はユーザインターフェース部32を抽出して、これを平面的に図示してある。ユーザインターフェース部32に向かって液晶表示部34の右側には上下の印を付したボタン36a、36bが配設され、液晶表示部34の下方には、右矢印を付した中央ボタン36cを挟んで、その左側にESCの文字を付したボタン36d、右側にEnterの文字を付したボタン36eが配設されている。
【0031】
ユーザインターフェース部36を斜めに傾斜させ面積を拡大することで比較的大きい液晶表示部34を配設することができる。また、これに加えて複数のプッシュ式操作ボタン36をユーザインターフェース部36に配設することができ、この操作ボタン36を光走査型光電スイッチ1に設置することで、ユーザが必要とする設定をディスプレイ付き端末である外部パーソナルコンピュータ無しに光走査型光電スイッチ1に対して直接的に設定作業を行うことのできる設計が可能になる。ここに、液晶表示部34は、12文字×4行の表示が可能であり、このように比較的沢山の情報を表示することのできる液晶表示部34を使ってユーザに必要な情報を提供し、ユーザは、この液晶表示部34を見ながら操作ボタン36を操作するだけで、外部パーソナルコンピュータ無しに、必要とする設定作業が可能になる。
【0032】
特に、安全に直接的に関係する機能を設定する場合、例えば「保護領域」を設定するときに、設定が正しく行われているかをユーザに確認(ベリファイ)させる必要があり、ユーザによる確認作業が完了することで始めて安全に直接的に関係する機能の、つまりこの場合「保護領域」の設定が反映される。ユーザによる確認作業は、以下の手順で実行される。光走査型光電スイッチ1は、設定入力に引き続いて、設定が未反映のユーザが入力した内容を文字、数字及び記号などを用いて液晶表示部34に表示するように設計されている。液晶表示部34に表示された内容が設定すべき内容と一致するか否かをユーザに確認させるのは上述の通りであるが、ユーザが一致すると判断したときには、ユーザに対して操作ボタン36の操作を伴うOK指示を求めるように設計される。そして、光走査型光電スイッチ1は、OK指示を受け付けることで、液晶表示部34に表示の内容確認を完了し、未確認の内容が有れば、その内容を液晶表示部34に表示してユーザからのOK指示を待つ。光走査型光電スイッチ1は、全ての内容についてOK指示を受け付けることで確認作業状態を終了し、確認作業が終わった内容を設定に反映する。一方、液晶表示部34に表示の内容と設定すべき内容とが一致しないとユーザが判断したときには、ユーザは操作ボタン36によって取消指示を行うことができる。光走査型光電スイッチ1は、取消指示を受け付けることで、全ての入力内容を設定に反映することなく確認作業を終了し、次いで設定入力を受け付ける状態に遷移する。ただし、保護領域A等の位置や領域に関する入力内容の確認は、表示された内容の一致を確認するだけは不十分であり、実際に光走査型光電スイッチ1の光学系を含む距離計測機能を有効化した上で、ユーザが設定すべき位置や領域に相当する場所に試験体をかざして保護領域A等の位置や領域に関する入力内容の確認作業を行うことになる。このことから、液晶表示部34には、安全に直接的に関係する機能の設定を受け付ける画面が表示されるだけでなく、設定された内容をユーザに確認させる画面を表示し、この確認画面によって上述したユーザによるベリファイを実行するのが好ましい。
【0033】
図6(a)は、光走査型光電スイッチ1の正面図であり、レーザ光が走査する水平面つまり走査面39を横線で図示してある。光走査型光電スイッチ1の内部構造を図示した図7から分かるように、光走査手段(走査ミラー)14及びこれを駆動するモータ24などの機構部品をユニット化した装置本体60(図9)を有し、装置本体60の下部にモータ24が配設されている。モータ24の回転軸には、たとえば、光電式のロータリエンコーダ25が設けられている。ロータリエンコーダ25は、円周方向に等間隔に配設された複数のスリットを有し、このスリットを通過した光に依存した出力に基づいて光走査手段14の回転角度を算出することで、投受光L1、L2の偏向方位が求められる。
【0034】
図4(a)に戻って、制御手段30には、液晶表示器34およびLEDインジケータ38及び操作ボタン36が接続されている。また、制御手段30には第1コネクタ40が接続され、この第1コネクタ40に対して、外部機器から延びる外部ケーブル42のコネクタ44を連結することができる。
【0035】
制御手段30は、距離算出手段51、方位算出手段52、位置認識手段53、判別手段54、汚れ検知手段55、信号生成手段56、表示制御手段57、故障検知手段58などを備えている。
【0036】
距離算出手段51:
距離算出手段51は、各偏向方位について、光電変換素子22からの受光信号に基づいて物体Mまでの距離を算出する。すなわち、投光素子LDからの走査光L1の投光タイミングと、物体Mによって反射された反射光L2を受光した光電変換素子22の受光タイミングとの差に、既知の光速を乗算することで物体Mまでの距離を算出することができる。投光タイミングは所定周期であり、この投光タイミングとモータ24の角速度との積によって光軸の空間密度つまり光軸間角度が規定される。なお、投光タイミングは、「時間」で規定してもよいし、「方位」や「空間密度(光軸間角度)によって規定してもよい。投受光タイミングに基づく距離の算出は、所定の微小時間ごとに繰り返し行うようにしてもよく、又は、例えば投光タイミングに同期して投受光毎に距離の算出を実行するようにしてもよい。
【0037】
方位算出手段52:
方位算出手段52は、前記投光および受光において、光走査手段14により測定領域に向けて偏向された走査光L1の照射方位(偏向方位)と物体Mからの反射光L2が入光する方位とを算出する。ただし、モータ24の角速度に対して「測定領域」内の物体Mまでの光の往復時間が相対的に充分に小さいため、照射方位と入光する方位とは同一とみなせることから、照射方位と入光方位のいずれか一方を算出するようにしてもよい。この投受光L1、L2の偏向方位つまり走査面での方位(走査方位)は、前述したロータリエンコーダ25からの出力に基づいて光走査手段14の回転角度を算出することで求められる。なお、投光タイミングを方位や空間密度(光軸間角度)によって規定する場合は、照射方位を偏向方位(走査方位)とするのが好適である。また、この方位は光軸番号と等価である。
【0038】
位置認識手段53:
位置認識手段53は物体Mの位置の認識を行う。すなわち、位置認識手段53は、投受光タイミング毎に、方位算出手段52により算出された偏向方位(走査方位)と、この偏向方位において距離算出手段51が算出した物体Mまでの距離とに基づいて物体Mの位置を算出することにより、この物体Mの位置を認識する。
【0039】
判別手段54:
判別手段54は、位置認識手段53により算出された物体Mの位置に基づいて、予め設定された保護領域A内に物体Mが存在するか否かを判別する。なお、判別手段54は、1回(1周期)でも保護領域内に物体Mが存在すると判別すると、「存在有り」を示す情報を供給するように構成してもよいし、所定の複数回に亘って連続して、つまり複数の周期に亘って保護領域内に物体Mが存在すると判別したときに初めて「存在有り」を示す情報を供給するようにしてもよい。
【0040】
光走査型光電スイッチ1の光学系は、光走査型光電スイッチ1の下半分の前面及び両側面を包囲する、横断面U字状の光透過カバー62によって密閉されており、この光透過カバー62は投光窓を形成するものである。図8は光透過カバー62を取り外した状態を図示してある。光透過カバー62はシール部材64を介して取り付けられ、複数のボルト66(図5)を取り外すことで光透過カバー62を光走査型光電スイッチ1から取り外すことができる。投光窓の光透過カバー62は光学フィルタであり、光走査型光電スイッチ1が出射するレーザ光の波長以外の波長成分を除去する。光透過カバー62は、その材料は任意であるが、ここでは弾性変形可能な合成樹脂材料で作られている。
【0041】
装置本体60の断面図である図7から最も良く分かるように、光走査手段(走査ミラー)14は、装置本体60の底部において、背面部から離れた前端部に配設されており、これにより走査ミラー14の回転軸線である垂直の第1軸線Zが比較的前方にオフセットして位置決めされている。これに対して、光透過カバー62は装置本体60の前方及び両側を包囲し、この光透過カバー62の左右両端部は光走査型光電スイッチ1の背面まで延びている。このような構成を採用することにより、光走査型光電スイッチ1の背面と干渉する部位を除く左右及び前方の領域を走査領域(測定領域)として設計することが可能になる。このことは、走査ミラー14の変形例として前述したように、互いに同期回転する投光用走査ミラーと受光用走査ミラーを同軸に且つ同じ方位に向くように配設した場合でも同様である。
【0042】
ちなみに、前述したように、この光走査型光電スイッチ1の走査範囲(測定領域)は180°よりも後方に拡大した270°である。このように走査範囲を光走査型光電スイッチ1の後方まで拡大できたのは、基本的には、(1)走査面39(図6(a)において、この走査面39と干渉する光走査型光電スイッチ1の背面の幅を走査面39における90°の範囲に制限する構成を採用し、更に、(2)走査ミラー14の回転軸線である第1軸線Zを光走査型光電スイッチ1の背面から離間させて、断面U字状の光透過カバー62の互いに並行な両側面を後方に延ばして、光走査型光電スイッチ1の背面を除く側方及び前方領域の全領域を光透過カバー62で包囲した、ことの2つの構成の組み合わせによる。換言すれば、光走査型光電スイッチ1は従来品に比べてスリムであり且つ高さ寸法も小さく、従来品の約半分の体積であり、手のひらに余裕を持って載せることのできる程度の大きさである。
【0043】
光透過カバー62の形状つまり上方に向けて徐々に広がった形状にも注目すべきである(図5、図8)。更に、図4から最も良く分かるように、光透過カバー62の下端部62aは垂直壁で構成され、この垂直下端部62aから上方に向かうに従って徐々に外方に広がるオーバーハングの形状を有し、このオーバーハング形状部分62bの上下方向中間部分に水平の走査面39が設定されている(図6)。
【0044】
図5から最も良く分かるように、光透過カバー62の下端に接する部分が、外方に突出した水平段部70で構成されている点に注目すべきである。光透過カバー62を挟んで第1、第2の光学素子71、72が配設されており(図4)、光透過カバー62よりも外側に位置する第2光学素子72が上記の水平段部70に配設されている。換言すると光透過カバー62よりも内側に第1光学素子71が配設され、この第1光学素子71は下方に向けて(第2光学素子72に向けて)設置されている。すなわち、対の第1、第2の光学素子71、72が互いに対向して位置決めされており、この第1、第2の光学素子71、72の組は光透過カバー62の周囲に適当な間隔を隔てて複数設けられている。
【0045】
第1、第2光学素子71、72:
光走査光電スイッチ1の光透過カバー62は可視光をブロックするフィルタの役割を有している。勿論、走査光L1及び反射光L2は透過することができる素材が選択されている。この光透過カバー62が汚染したり、経時的劣化してくると光透過カバー62の光透過率が低下して光電変換素子22に入射する反射光L2の光量が低下する。この現象は物体Mの位置検出の感度が低下する原因となるため好ましくないのは言うまでもない。
【0046】
光透過カバー62を挟んで互いに対向した第1、第2の光学素子71、72の各組は、光透過カバー62の汚染の状態を常時監視している。第1光学素子71が発した光は、光透過カバー62を介して第2光学素子72に入光し、この第2光学素子72が受光した光の量が制御手段30に供給される。
【0047】
汚れ検知手段55:
汚れ検知手段55は、第2光学素子72が受光した光量によって光透過カバー62が所定の透過率を維持しているのを確認する。投光窓を構成する光透過カバー62の経時劣化や汚染などによって透過率が低下したことは第2光学素子72が受光した光量によって検知することが可能である。ここに、第2光学素子72が受光した光量が所定のしきい値以下となったときには、液晶表示部34やLEDインジケータ38を使って光透過カバー62が交換時期にあることをユーザに通知するのがよい。また、汚れ検知手段55は、光走査型光電スイッチ1が故障しているか否かの検出を行う故障検出手段、つまり、所期の検出等を行うことができる安全な状態か否かを確認する手段を構成し、もし、光走査型光電スイッチ1が故障していると汚れ検知手段55が判断した場合には、液晶表示部34やLEDインジケータ38を使ってユーザに警告すると共に、信号生成手段56を介して動作不許可の信号を外部機器に向けて送信する。
【0048】
なお、投光窓を形成する光透過カバー62の汚染や劣化を検出するのに、光透過カバー62を挟んで第1、第2光学素子71、72を対峙して配置する例を説明したが、例えば第2光学素子72に代えて反射鏡を水平段部70に配置して、第1光学素子71が発した光を反射鏡で反射し、そして反射光を、第1光学素子71に隣接して配置した第2光学素子72で受光するようにしてもよい。この例によれば、光透過カバー62の内側に第1、第2光学素子71、72が互いに接近して配置されることになる。
【0049】
信号生成手段56:
信号生成手段56は判別手段54の判別結果に基づいて安全信号を生成する。たとえば、所定のモードにおいて、光走査型光電スイッチ1の正常な動作が確認でき、かつ、保護領域Aに物体Mが存在しないと判別手段54が判定した場合には、信号生成手段56は安全出力としてON信号(動作許可信号)を生成し、この安全出力は、制御手段30及び第1コネクタ40を介して外部ケーブル42を通じて外部機器に向けて送信され、そして、外部機器の動作が許容される。
【0050】
故障検知手段58は、光走査型光電スイッチ1が正しく動作していることを確認(ベリファイ)するものであり、正常動作が確認できないときには光走査型光電スイッチ1が故障したとみなす。
【0051】
光走査型光電スイッチ1の検出感度維持及び調整機構:
図9、図10は光走査手段つまり走査ミラー14が光走査型光電スイッチ1の背面の方向に向いた状態を示している。勿論、この状態では、光走査型光電スイッチ1の検出は不可能であることは言うまでもない。装置本体60の起立した支柱部分60aには、走査ミラー14と対面することのできる位置に、走査ミラー14の回転方向遅れ側と進み側に、つまり左右に基準対象物としての第1、第2の2つの反射面73、74が配設され、この第1、第2の反射面73、74は、共に約45°傾斜して斜め上方に向いた状態で配設されている。また、この第1、第2の反射面73、74に対向して、この第1、第2の反射面73、74の上方には、斜め下方に約45°傾斜した定置ミラー75が支柱部分60aに配設されている。つまり、装置本体60の起立した支柱部分60aには、走査ミラー14が後向きになったときに対面する位置に、第1、第2の反射面73、74が斜め上方に向いた状態で配設され、そして、この第1、第2の反射面73、74の上方に斜め下方に向いた状態で定置ミラー75が配設されている。
【0052】
基準対象物としての第1、第2の反射面73、74は、反射率が異なる材料で作られ又は反射率の異なる色を有している。具体的な例として、第1の反射面73が黒色の材料又は黒色に着色されており、第2の反射面74が白色の材料又は白色に着色されている。
【0053】
投光素子LDが出射したレーザパルス光L1は、投光レンズ10、投光用の第1、第2ミラー(反射鏡)11、12によって走査ミラー14に当たり、この走査ミラー14によって水平方向に進む光になる。走査ミラー14が前方、側方に向いていれば、このレーザパルス光L1は測定領域に差し向けられることになる。走査ミラー14が一回転する最中に、走査ミラー14が後方に向いたときでもレーザパルス光L1を出射することにより、レーザパルス光L1は、後向きになった走査ミラー14によって先ず黒色の第1反射面73に差し向けられ、次いで白色の第2反射面74に差し向けられることになる。このレーザ光L1は、約45°斜め上方に向いた第1、第2の反射面73、74で反射して垂直方向上方に進み(L3)、この反射パルス光L3は、第1、第2の反射面73、74の上方に配設された定置ミラー75で反射する。この定置ミラー75は約45°斜め下方に向いた姿勢で配設されているため、定置ミラー75で反射した反射パルス光L3は、走査ミラー14に戻り、この走査ミラー14で反射して上方に進んで、受光レンズ20、受光反射体21を経て光電変換素子22に集光される。つまり、第1、第2の反射面73、74の反射パルス光L3は、警告領域又は保護領域Aの物体Mで反射した反射パルス光L2のときと同じ要素14、20、21を経て、受光素子である光電変換素子22に入力される。
【0054】
走査ミラー14の後方に、走査ミラー14の回転方向(走査方向)の遅れ側と進み側に隣接して反射率の異なる第1反射面73(黒色)、第2反射面74(白色)を設け、そして、同じ垂直支柱部分60aに固設した定置ミラー75を設けることで、第1反射面73(黒色)、第2反射面74(白色)の反射光L3は、警告領域又は保護領域Aの物体Mで反射した反射光L2のときと同じ要素14、20、21を経て、受光素子である光電変換素子22で受光される。
【0055】
ところで、基準対象物にレーザパルス光を照射し、その反射パルス光を受光したときの受光強度は次の式で表すことができる。
【0056】
(式1)
受光強度=
{投光強度×投光経路の光学特性×基準対象物の反射率÷(基準対象物までの距離)2×受光経路の光学特性×受光ゲイン}
【0057】
また、レーザ光による走査の場合、検出感度は対象物の反射率や対象物までの距離に依存しないで、次の式で表すことができる。
【0058】
(式2)
検出感度={投光強度×投光経路の光学特性×受光経路の光学特性×受光ゲイン}
【0059】
上記の式1及び式2により、基準対象物の反射率と基準対象物までの距離が一定であれば、次の式3が成立する。
【0060】
(式3)
検出感度={受光強度×一定値}
【0061】
レーザ光を使った光走査型光電スイッチ1の内部に基準対象物を具備することで基準対象物の反射率と基準対象物までの距離を一定にするのは容易であることから、基準対象物に対して投光したときに得られる受光感度を一定に保つことで検出感度を一定に維持することができる。この観点に立脚するときに、例えば光走査型光電スイッチ1を工場出荷するときに、その検出感度が最適な状態となるときの受光強度を計測し、そして、計測した受光強度を光走査型光電スイッチ1の記憶素子に記憶させ、光走査型光電スイッチ1が動作中に、この記憶素子に記憶してある受光強度となるように投光強度及び/又は受光ゲインを調整することで光走査型光電スイッチ1の検出感度を最適な状態に保つことができる。
【0062】
図11は第1、第2の反射面73、74を抽出した図であり、矢印は、走査ミラー14の回転方向つまり走査方向を示す。図12は、レーザパルス光が時系列に第1、第2の反射面73、74に当たっている状態を図示してある。
【0063】
基準対象物の一つである黒の反射面73にレーザパルス光が当たっているときの受光感度が「100」(図12の(I)、他の基準対象物である白の反射面74にレーザパルス光が当たっているときの受光感度が「600」であったとする(図12の(II)。ここに、第1、第2の反射面73、74について、「黒」「白」という表現を用いているが、これは便宜上の表現であると理解されたい。「黒」とは投光源であるレーザ光の波長に対して低反射率である意味であり、「白」とは投光源であるレーザ光の波長に対して高反射率である意味である。また、黒の反射面73として十分に反射率が低い面を採用することで、汚れを構成する物質の反射率は黒の反射面73の反射率と同等又はそれ以上となるため、黒の反射面73は汚れると反射率が高くなる傾向にある。一方、白の反射面74として十分に反射率の高い面を採用することで、汚れると反射率は低くなる傾向にある。
【0064】
白の第2反射面74での受光強度を「600」に維持するように投光強度及び/又は受光ゲインを調整した場合、白の第2反射面74が汚れて反射率が低下したとき、この第2反射面74での受光強度を「600」に維持するように投光強度及び/又は受光ゲインの調整が実行されることになる。この場合、黒の第1反射面73での受光強度は、反射率及び距離が一定のままで受光感度が高くなるため、高くなる。この現象に対処するには、第1、第2の反射面73、74での受光感度を常時モニタし、そして、黒の第1反射面73での受光強度の値に許容範囲(例えば80〜120)を設定し、黒の第1反射面73での受光強度が許容範囲を超えたときには白の第2反射面74に汚れが発生したとみなす。白の第2反射面74に汚れが発生すると、適切な感度調整ができなくなるため、保護領域Aの監視を正しく行うことができなくなることから、光走査型光電スイッチ1は安全出力をOFF状態にすることで危険源の動力を停止させる。また、光走査型光電スイッチ1は、液晶表示部34又はLEDインジケータ38を使ってユーザに安全が確認できない旨(安全出力がOFF状態であること)の表示や安全が確認できない理由(エラー内容)についても表示するように構成されてもよい。さらに、光走査型光電スイッチ1は安全出力以外の非安全の出力信号を使用して、エラーが発生していることを外部機器に出力したり、通信ケーブル80を介して外部パーソナルコンピュータPCへエラーの要因や安全出力がOFF状態にあることを送信するように構成されてもよい。
【0065】
同様に、黒の第1反射面73が汚れることで反射率が高くなったとき、黒の第1反射面73の反射光は強くなり、したがって、黒の第1反射面73での受光強度が増加する現象が現れる。このときも、黒の第1反射面73での受光強度が許容範囲を超えたときには基準対象物の一つとしての黒の第1の反射面73に汚れが発生したとみなして、液晶表示部34又はLEDインジケータ38を使ってユーザに警告することができる。
【0066】
基準対象物としての反射率の異なる第1、第2の反射面73、74を隣接して光走査型光電スイッチ1に内蔵し、光走査型光電スイッチ1の光学系を兼用することで、受光感度を常時モニタして受光感度が一定となるように投光強度及び/又は受光ゲインを調整することができる。したがって、光走査型光電スイッチ1の設計において、経年変化や使用時の周囲温度の変動を見越して、この変動分を許容範囲として大きな余裕代を仕様として規定する必要はなく、また、この余裕代を小さくして当初から投光強度及び/又は受光ゲインを高く設定したなかで所定の検出感度を確立することができ、光走査型光電スイッチ1の小型化が容易になる。加えて、第1、第2の反射面73、74からなる調整手段の汚れについても、これを故障として検出するようにしてあるため、安全性を担保するための検出性能のマージンを小さくすることができ、小型でありながら安全性を担保したうえで長距離の検出を行うことのできる光走査型光電スイッチ1を提供することができる。
【0067】
保護領域Aの設定:
光走査型光電スイッチ1の保護領域Aの設定は、光走査型光電スイッチ1だけで簡易な設定ができるように構成するか否かは兎も角として、図13に示すように、パーソナルコンピュータPCを使って行われる。パーソナルコンピュータPCと光走査型光電スイッチ1とは通信ケーブル80を介して接続される。パーソナルコンピュータPCは、既知のように、ディスプレイ81、入力操作部82を有する。
【0068】
パーソナルコンピュータPCには、予め保護領域Aを設定するためのアプリケーションプログラムがインストールされており、このプログラムを使って、光走査型光電スイッチ1の保護領域Aの編集を行うことができる。
【0069】
保護領域編集システムとしてのパーソナルコンピュータPCの構成をブロック図で表したのが図14である。パーソナルコンピュータPCは、アプリケーションプログラムによって、追加及び削除エリア指定部84、不整合エリア抽出部86、設定領域更新部87、設定領域記憶部88、設定領域転送部89及びダイアログ表示部90の機能を備えている。
【0070】
設定領域記憶部88は、光走査型光電スイッチ1に保護領域Aを指定するための設定領域情報を記憶するメモリで構成される。追加及び削除エリア指定部84は、入力操作部82からの入力信号に基づいて、追加エリア、削除エリア及び線分を指定する動作を行う。
【0071】
光走査型光電スイッチ1に既に設定されている保護領域Aに領域を追加する場合には、ユーザが指定した領域が追加エリアに指定される。また、既に設定されている保護領域Aから領域を削除する場合には、ユーザが指定した領域が削除エリアに指定される。
【0072】
不整合エリア抽出部86は、光走査型光電スイッチ1から見て、保護領域A及び追加エリア間に位置する領域を不整合エリアとして自動的に抽出する動作を行っている。すなわち、光走査型光電スイッチ1から見て、保護領域Aと追加エリアとして指定された領域との間に検知エリアとして指定できない領域があれば、当該領域を不整合エリアとして抽出する動作が行われる。
【0073】
不整合エリア抽出部86では、領域追加時に線分が指定された場合、光走査型光電スイッチ1から見て、保護領域A及び線分問に位置する領域が不整合エリアとして抽出される。ここでは、エリア追加時に抽出される不整合エリアを補間エリアと呼ぶことにする。
【0074】
また、不整合エリア抽出部86は、光走査型光電スイッチ1から見て、削除エリアよりも後方に位置する領域であって、保護領域Aの領域を不整合エリアとして自動的に抽出する動作を行っている。すなわち、光走査型光電スイッチ1から見て、削除エリアとして指定された領域よりも後方に保護領域Aとして指定されている領域があれば、当該領域を不整合エリアとして抽出する動作が行われる。
【0075】
不整合エリア抽出部86では、エリア削除時に線分が指定された場合、光走査型光電スイッチ1から見て、線分よりも後方に位置する領域であって、保護領域A内の領域が不整合エリアとして抽出される。ここでは、エリア削除時に抽出される不整合エリアを「影エリア」と呼ぶことにする。
【0076】
領域表示部85は、ディスプレイ81を制御し、設定領域記憶部88に記憶されている設定領域情報に基づいて保護領域A、追加エリア、削除エリア、不整合エリア(補間エリア及び影エリア)を目視で識別可能に表示する動作を行う。すなわち、既に設定されている保護領域Aに領域を追加する場合に、保護領域A及び追加エリアに対して、補間エリアを識別可能に表示し、その際、追加エリア及び補間エリアが付加される前の保護領域Aに対して補間エリアが識別可能にディスプレイ81に表示される。
【0077】
また、既に設定されている保護領域Aから領域を削除する場合に、保護領域A及び削除エリアに対して、影エリアを識別可能に表示し、その際、削除エリア及び影エリアが除外される前の保護領域Aに対して影エリアが識別可能にディスプレイ81に表示される。
【0078】
設定領域更新部87は、入力操作部82からの入力信号に基づいて、設定領域記憶部88に記憶されている保護領域Aを更新する動作を行う。すなわち、既に設定されている保護領域Aに領域を追加する場合には、追加エリア及び補間エリアを付加した領域が新たな保護領域Aとして更新される。
【0079】
エリア追加時に線分が指定された場合には、保護領域Aに補間エリアを付加した領域が新たに保護領域Aとなるように設定領域情報の更新が行われる。
【0080】
また、既に設定されている保護領域Aから領域を削除する場合に、削除エリア及び影エリアを除外した領域が新たな保護領域Aとなるように設定領域情報の更新が行われる。
【0081】
エリア削除時に線分が指定された場合には、保護領域Aから影エリアを除外した領域が新たな保護領域Aとなるように設定領域情報の更新が行われる。
【0082】
ダイアログ表示部90は、ディスプレイ81を制御し、入力操作部82からの入力信号に基づいて確認ダイアログを表示する。すなわち、既に設定されている保護領域Aに領域を追加する場合に、追加エリア及び補間ニリアを保護領域Aに付加するか否かの照会するための照会ダイアログ93が確認ダイアログとしてディスプレイ81に表示される。
【0083】
同様に、既に設定されている保護領域Aから領域を削除する場合に、削除エリア及び影エリアを保護領域Aから除外するか否かを照会するための照会ダイアログ93が確認ダイアログとしてディスプレイ81に表示される。
【0084】
設定領域更新部87では、上記照会ダイアログの表示後の入力操作部82からの入カ信号、すなわち、ユーザによる変更許可の操作入力に基づいて設定領域記憶部88の設定領域情報の更新が行われる。
【0085】
設定領域転送部89は、設定領域記憶部88に記憶されている保護領域Aの情報を光走査型光電スイッチ1に転送する動作を行う。更に、設定領域転送部89は、光走査型光電スイッチ1に保護領域Aの情報を転送した後、転送した保護領域Aを光走査型光電スイッチ1に反映する前に、光走査型光電スイッチ1から保護領域Aの情報の返送を受け付け、ユーザによる保護領域Aの確認作業に利用できるように処理する構成が採用される。転送した保護領域Aの光走査型光電スイッチ1への反映は、ユーザによる保護領域Aの確認作業を経て実行される。
【0086】
図15は、パーソナルコンピュータPCのディスプレイ81に表示エリア設定画面を示す。このエリア設定画面は、保護領域Aを新たに指定し、或いは、既に設定されている保護領域Aを編集する際に用いられる入力画面である。
【0087】
ディスプレイ81に表示されるエリア設定画面では、光走査型光電スイッチ1を示すシンボルSを中心とする直交座標に対して最大の検出エリア(測定領域)が表示されており、横軸に平行なグリッド線G1が500mm間隔で配置されていると共に、縦軸に平行なグリッド線G2が500mm間隔で配置されている。
【0088】
シンボルSよりも後方では、走査レーザ光の出射角度によって検知可能な距離の上限が変化しており、検知可能な角度範囲Hはマイナス45°以上プラス225度以下である。この角度範囲H以外の領域は不感領域であり、保護領域Aとして指定することはできないようになっている。
【0089】
図16は、矩形の保護領域Aに領域92を追加する場合の画面が示す。保護領域Aは、矩形の他に、多角形、光走査型光電スイッチ1を示すシンボルSを中心とした円形又は扇形なども指定することができ、また、マウスポインタを移動させながら描画した線を境界とする閉じた領域を保護領域Aとして指定することができる。
【0090】
ディスプレイ81に表示のエリア設定画面において保護領域Aが指定されたとすると、例えば、ユーザによって決定キーが操作されると、当該保護領域Aが確定し、そして、この保護領域Aを検知対象とするために最小限付加しなければならない領域が補間エリア92として自動的に抽出される。すなわち光走査型光電スイッチ1から見て、保護領域Aとして指定された領域との間における検知対象として指定されていない領域として補間エリア92が抽出される。補間エリア92を保護領域Aに付加しても良いか否かを照会するための確認ダイアログ93が表示され、ユーザによって許可されると、ユーザが設定した保護領域Aに補間エリア92を付加した領域を新たな保護領域Aとして設定され、この新たな保護領域Aに基づいて情報が更新される。
【0091】
図17は、保護領域Aの一部を削除する例を示す。保護領域Aから削除する領域は、任意に指定することができ、ユーザが指定した削除エリアが参照符号94で図示されている。削除する領域は、矩形形状の他に、多角形、光電スイッチ1を中心とする円形又は扇形なども指定することができる。また、画面上のマウスポインタを移動させながら描画した曲線を境界とする閉領域を指定することもできる。
【0092】
保護領域Aに含まれるエリア94を削除エリアとして指定し、例えば、ユーザによって決定キーが操作されると、当該エリア94が削除すべきエリアとして確定する。そして、この削除エリア94を保護領域Aから削除する際に、当該エリア94を非検知領域とすることによって最小限除外しなければならない領域が影エリア95として自動的に抽出される。すなわち、光走査型光電スイッチ1から見て、削除エリアとして指定されたエリア94よりも後方の検知対象領域が影エリア95として抽出される。
【0093】
影エリア95が自動抽出した際には、影エリア95を保護領域Aから除外しても良いか否かを照会するための確認ダイアログ93が表示される。そして、ユーザによって影エリア95を含めて保護領域Aの変更が許可されると、保護領域Aから削除エリア94及び影エリア95を除外したエリアを新たな保護領域Aとして設定され、この新たな保護領域Aのゾーン情報が更新される。図17(C)は、新たな保護領域Aを示してある。
【0094】
ミューティング機能及びミューティングエリアの切替え制御:
光走査型光電スイッチ1は、保護領域Aの一部又は全部のエリアに単数又は複数のミューティングエリアを設定して、所定の条件が成立したときに、予め設定したミューティングエリアでの検知機能を無効化するミューティング機能を有する。保護領域Aの一部のエリアをミューティングエリアに設定する場合を「部分ミュート」と言い、保護領域Aの全部のエリアをミューティングエリアに設定する場合を「全ミュート」と言う。光走査型光電スイッチ1は、他の検知手段やタイミングによって異なるミューティングエリアに切り替えすることができる。以下の説明では、部分ミュートを中心にミューティングエリアの切替え制御を説明するが、複数のミューティングエリアのうち、一つのミューティングエリアを保護領域Aの全体に設定してもよい(「全ミュート」)。
【0095】
ミューティング機能及びミューティングエリアの設定は、上述した保護領域Aの設定と同様に、パーソナルコンピュータPCを使って行うことができ、保護領域Aを設定したときに使用したアプリケーションプログラムにミューティングに関する機能が付加されている。
【0096】
図18は、パーソナルコンピュータPCにインストールされたアプリケーションプログラムを使って、扇状の保護領域Aを設定した場合を例示している。この保護領域Aの設定方法に関しては、図13〜図17を参照した前述の説明の通りであり、指定した保護領域Aを設定するか否かの照会ダイアログ93が確認ダイアログとしてディスプレイ81に表示される。この照会ダイアログ93を使ってユーザが許可することにより指定した保護領域Aが設定される。
【0097】
図19は、保護領域Aを設定するときに使用したアプリケーションプログラムのミューティングに関する設定機能を使ってミューティングエリアを設定する表示画面を示す。参照符号97はユーザがミューティングエリアとして指定した領域を示す。図19から理解できるように、ユーザは保護領域Aのうち光走査型光電スイッチシンボルSから離れたエリアを横断する矩形のエリアを指定していることに注目されたい。この指定エリア97は、少なくとも保護領域Aのうち、光走査型光電スイッチシンボルSから離れた端を、この図19の例では含んでいる。もし、シンボルSから離れた端を含んでいないときには、つまり、保護領域Aにおいて図19における上下中間部分にエリアを指定したときには、後に説明する影エリアが自動抽出されて、この影エリアが表示される。そして、ユーザが指定したエリア97は保護領域Aの上に重畳表示され、また、保護領域Aとユーザが指定したエリア97とは別の色で表示され、ユーザが指定したエリア97と保護領域Aとがオーバーラップした部分は、保護領域Aの第1の色とユーザが指定したエリア97の第2の色とが混ざり合った第3の色で表示される。
【0098】
パーソナルコンピュータPCのディスプレイ81には、指定エリア97で正しいのか質問する照会ダイアログ93が確認ダイアログとして表示され、ユーザが許可することにより指定したエリア97と保護領域Aとがオーバーラップするエリアにミューティングエリア98が設定される(図20)。ミューティングエリアを設定した状態では、先のユーザにより指定されたエリア97(図18)のうち保護領域Aからはみ出した部分が削除されて、保護領域Aと、この保護領域Aの領域内に設定されたミューティングエリア98とが異なる色で表示される。同じ要領で、同じ保護領域Aに複数のミューティングエリア98を設定することができ、各ミューティングエリア98毎に、図21に示すミューティング機能設定画面を使ってミューティング機能を動作させる条件及びミューティング機能を実行する時間などの設定が可能である。
【0099】
なお、ミューティングエリア98の設定手順は、保護領域Aの一部を削除する手順と同様の手順で行われる。つまり、ミューティングすべきエリアが指定されるとミューティングエリア98として最小限追加すべき影エリア(光走査型光電スイッチ1から見て指定されたエリアよりも後方のエリア)を自動抽出し、ミューティングエリア98として追加しても良いか否かを照会するための確認ダイアログが表示され、許可指令に従ってミューティングエリア98の設定及びその更新が実行される。
【0100】
図21の設定画面を使って、例えば複数のミューティングエリア98が保護領域Aに設定されている場合に、各ミューティングエリア98毎にミューティングを開始するタイミングやミューティングを解除するタイミング、ミューティング状態を許容する時間、複数のタイミング信号の時間差などを設定することができる。
【0101】
図22を参照して具体的な一例をワークWの搬送システムを使って説明すると、図22は搬送装置(例えばベルトコンベア)Vの側方から見た様子が示され、搬送装置Vには、ゲート100が設けられ、このゲート100の上端横バーの中央に光走査型光電スイッチ1が配設され、光走査型光電スイッチ1は走査面39(図5)が下方に向けて広がり且つゲート100で囲まれた垂直面と一致するようにして配設されている。すなわち、ゲート100の開口には、その上端中央の光走査型光電スイッチ1によってライトカーテン(検出平面)が形成されている。
【0102】
搬送装置Vには、光電センサなどで構成されたミュートセンサ101〜104が所定条件を満たすようにして配設されている。ここに搬送装置Vの搬送方向に従って上流側から下流側に向けて第1、第2のミュートセンサ101、102がゲート100の手前つまりゲート100の上流側に配設され、第3、第4のミュートセンサ103、104がゲート100の下流側に配設されている。ゲート100の下流は侵入禁止エリアである。第1〜第4のミュートセンサ101〜104は、夫々、図外のケーブルによって光走査型光電スイッチ1に接続される。変形例として第1、第3のミュートセンサ101と103の出力信号がワイヤードオアされ、第2、第4のミュートセンサ102と104の出力信号がワイヤードオアされて光走査型光電スイッチ1へ接続されてもよい。ワイヤードオアされた第1と第3のミュートセンサ101と103の出力信号線は、第1と第3のミュートセンサ101と103の少なくともいずれか一方のミュートセンサがワークWを検出したことを光走査型光電スイッチ1へ伝える。ワイヤードオアされた第2と第4のミュートセンサ102、104の出力信号線は、第2と第4のミュートセンサ102と104の少なくともいずれか一方のミュートセンサがワークWを検出したことを光走査型光電スイッチ1へ伝える。ワークWを検知したことでONするミュートセンサの場合、ミュートセンサの出力信号を短絡することでワイヤードオア信号とすることができる。ワイヤードオアした出力信号線を光走査型光電スイッチ1に接続することで、ミューティング機能に必要な光走査型光電スイッチ1の入力信号線の数を4本から2本に削減することができる。以下に、ワイヤードオアされた場合を例に説明する。
【0103】
第1ミュートセンサ101と、第2ミュートセンサ102との間の間隔はD1である。第2ミュートセンサ102と第4ミュートセンサ104との間の間隔はD2である。第1ミュートセンサ101と、第3ミュートセンサ103との間の間隔はD3である。また、ワークWの移動速度つまり搬送装置Vの搬送速度はV1である。前述した第1〜第4のミュートセンサ101〜104の設置条件は次の通りである。
【0104】
条件(1) Ta<{T=D1/V1}<Tbである。
条件(2) D2<Lwである。
条件(3) D3<Lwである。
ここに、Ta、Tbは予め定められた固定値であり、LwはワークWの前後長さである。
【0105】
上記条件(1)は、ワークWの移動によって第1ミュートセンサ101が検出状態に遷移してから第2ミュートセンサ102が検出状態に遷移するまでの時間差T=D1/V1が所定範囲内にあることを要求している。条件(2)は、第4ミュートセンサ104が検出状態に遷移する前に第2ミュートセンサ102が非検出状態となるのを防止するための条件である。条件(3)は、第3ミュートセンサ103が検出状態に遷移する前に第1ミュートセンサ101が非検出状態となるのを防止するための条件である。
【0106】
条件(1)を満たすように第1、第2ミュートセンサ101、102を配置することにより、ワークWの侵入と、ワークW以外の侵入物の侵入とを第1ミュートセンサ101が検出状態に遷移してから第2ミュートセンサ102が検出状態に遷移するまでの時間差によって判別することができる。
【0107】
条件(2)及び条件(3)を満たすように第1〜第4のミュートセンサ101〜104を配置することにより、搬送手段Vの搬送速度が一定であるという条件の下で、搬送方向の距離が異なることを利用して、ワークWの侵入と、ワークW以外の侵入物の侵入とを判別することができる。
【0108】
図23は、第1〜第4ミュートセンサ101〜104に接続された光走査型光電スイッチ1の機能ブロック図である。図23において、参照符号Trはミュートセンサ101〜104からの外部入力を受け付ける外部入力受付端子を示す。光走査型光電スイッチ1は、ミュート開始判別部106と、ミューティング信号生成部108と、ミュート終了判別部110とにより構成され、保護領域Aに対象物が侵入すると非検出状態から検出状態に遷移して安全出力信号制御部111からOFF信号(動作不許可信号)が出力される。
【0109】
ミュート開始判別部106は、ミューティングエリアを含む保護領域Aへの対象物(物体M)の侵入を判定する第1侵入判定部112と、第1、第3のミュートセンサ101、103からの外部入力を端子Trを経由して受け付けた外部入力信号と、第2、第4のミュートセンサ102、104からの外部入力を端子Trを経由して受け付けた外部入力信号とに基づいて、次の条件が成立したことを判定してミューティング信号生成部108へミューティング開始条件が成立したことを出力する。ミューティング成立条件とは、ミューティングエリアを含む保護領域Aへの侵入を判定する第1侵入判定部112が非検知状態であり、且つ第1、第3のミュートセンサ101、103が非検知状態から検知状態へ遷移した時から、その後、第2、第4のミュートセンサ102、104が非検知状態から検知状態へ遷移するまでの時間差T1が所定の範囲内(Ta<T1<Tbを満足する範囲)であることである。
【0110】
ミューティング信号生成部108は、ミュート開始判定部106による判定結果及びミュート終了判定部110による判定結果に基づいて、安全出力信号制御部111とミュート終了判定部110にミューティング状態信号を生成する動作を行う。
【0111】
ミュート終了判別部110は、ミューティングエリアを除く保護領域Aへの対象物(物体M)の侵入を判定する第2侵入判定部114と、第1、第3のミュートセンサ101、103からの入力信号と、第2、第4のミュートセンサ102、104からの入力信号と、ミューティング状態信号生成部108が出力するミューティング状態信号に基づいて、次の条件によりミューティングを終了させる動作を判定して、ミューティング状態信号生成部108へミューティング終了条件が成立したことを出力する。ミューティング終了条件とは、ミューティングエリアを除く保護領域Aへの侵入を判定する第2侵入判定部114が非検知状態から検知状態へ遷移するか、又は、第1、第3のミュートセンサ101、103の双方が非検知状態へ遷移するか、又は、第2、第4のミュートセンサ102、104の双方が非検知状態へ遷移するか、又は、ミューティング状態信号生成部108が出力するミューティング状態信号が所定時間Tcを越えてミューティング中状態になっていることである。なお、第1、第2の侵入判定部112、114には、対象物(物体M)までの距離を計測する距離計測部116から信号が入力される。
【0112】
ミューティング信号生成部108は、ミュート開始判別部106及びミュート終了判別部110による判別結果に基づいて、安全出力制御部111に対してミューティングを指示するためのミューティング信号を生成する動作を行う。
【0113】
安全出力信号制御部111から出力される安全出力信号は、ゲート100よりも下流の侵入禁止エリア内の加工機を停止させるための制御信号として使用される。この安全出力信号制御部111は、ミューティングエリアを含む保護領域Aへの侵入判定を判定する第1侵入判定部112の判定結果と、ミューティングエリアを除く保護領域Aへの侵入判定を判定する第2侵入判定部114の判定結果と、ミューティング状態信号生成部108が出力するミューティング状態信号とに基づいて、安全出力信号を制御する。より詳しくは、安全出力信号制御部111はミューティング状態信号が非ミューティング中であるときは、保護領域Aへの第1侵入判定部112の判定結果が検知状態であれば安全出力をOFFに制御し、非検知状態であれば安全出力をONに制御する。一方、ミューティング状態信号がミューティング中であるときは、ミューティングエリアを除く保護領域Aへの第2侵入判定部114の判定結果が検知状態であれば安全出力をOFFに制御し、非検知状態であれば安全出力をONに制御する。
【0114】
図24、図25は、図22の搬送装置VによるワークWの搬送に関する動作の一例を示し、(a)から(e)は時系列である。ワークWが第1ミュートセンサ101に干渉しない時点(図24(a)でゲート100に設置した光走査型スイッチ1の保護領域Aに物体Mが侵入すると、光走査型スイッチ1からOFF信号(動作不許可信号)が出力される。
【0115】
図24(b)には、ワークWの先端部が第1ミュートセンサ101と第2ミュートセンサ102の間に位置し、第1ミュートセンサ101の投光部から射出された光をワークWが遮断している場合が示されている。この場合、第1ミュートセンサ101だけが検出状態となる。
【0116】
図24(c)には、ワークWの先端部が第2ミュートセンサ102と干渉し、第1、第2のミュートセンサ101、102は、共に、各投光部から射出された光をワークWが遮断している場合が示されている。この場合、第1、第2のミュートセンサ101、102は、いずれも検出状態となっており、第1、第2のミュートセンサ101、102がこの順序で検出状態に遷移したことによって、保護領域Aのミューティングエリア98においてミューティング機能が実行されている。従って、ワークWがゲート100の光走査型スイッチ1の保護領域Aにおけるミューティングエリア98を通過しても警報信号は出力されない。
【0117】
図25(d)は、ワークWの後端部が光走査型スイッチ1のミューティングエリア98と干渉し且つゲート100の下流の第3ミュートセンサ103にもワークWが干渉している状態にある。この場合、ミューティング状態が継続される。
【0118】
図25(e)は、ワークWの後端部が第4ミュートセンサ104と干渉している状態にある。第3ミュートセンサ103が非検出状態に遷移したことにより、光走査型光電スイッチ1のミューティングエリア98は解除され、光走査型光電スイッチ1の保護領域Aに物体Mが侵入すると、直ちに警報信号が出力される。
【0119】
図26は、図24、図25で説明した動作のタイムチャートである。第1〜第4ミュートセンサ101〜104は、非検出状態でローレベル(オフ状態)であり、検出状態でハイレベル(オン状態)となる信号を出力する。
【0120】
なお、図26のタイムチャートにおいて、光走査型光電スイッチ1に関して「有」は保護領域A内への物体Mの侵入が有るという意味であり、「無」は保護領域Aへの物体Mの侵入が無いという意味である。
【0121】
ワークWの移動に伴って第1〜第4のミュートセンサ101〜104が順次検出状態に遷移する。そして、第1ミュートセンサ101が検出状態に遷移してから第2ミュートセンサ102が検出状態に遷移するまでの時間差T1が所定範囲内にあれば、第2ミュートセンサ102の出力信号の立ち上がりに同期してミューティング信号がハイレベルに切り替えられ、光走査型光電スイッチ1のミューティングエリア98でミューティングが開始される。したがって、このミューティング動作中は、光走査型光電スイッチ1の保護領域Aにおけるミューティングエリア98は、事実上、無効エリアとなる。
【0122】
ミューティング状態となってから経過時間T2が所定時間Tc以上となった場合、および、ミューティングエリアを除く保護領域Aへ対象物(物体M)が侵入したことを光走査型光電スイッチ1が検知した場合には、ミューティングは強制終了される。ユーザが所定時間Tcを設定するときに例えば5分というように上限値を設けてもよい。なお、ミュートセンサ101〜104として光電式のセンサを例に説明したが、ミュートセンサとして、電波音波、超音波、接触式センサであってもよい。
【0123】
また、搬送装置Vを使って高さの異なるワークWが所定の規則に従って搬送されるときには、ワークWがゲート100を通過するタイミングをゲート100の上流側に配置したセンサで検出して、このセンサからのタイミング信号に基づいて、ワークWの高さに合致したミューティングエリア98に切り替えるようにしてもよい。
【0124】
図27〜図29は、高さや幅の異なるワークWに夫々対応した複数のミューティングエリア98を設定した場合の例を説明するための図である。
【0125】
ここにワークWは例示的に自動車だとすると、第1の車種の自動車W1は比較的高さ寸法が高く且つ車幅寸法が小さい。これに対して第2の車種の自動車W2は比較的高さ寸法が低く且つ車幅寸法が相対的に大きい。図27〜図29を参照して、ゲート100を挟んで左側が侵入禁止エリアであり、ゲート100の上端横バーの中央部分に光走査型光電スイッチ1が配設され、この光走査型光電スイッチ1の走査面39はゲート100で囲まれた鉛直面に沿って設定され、これによりゲート100の開口には光走査型光電スイッチ1によってライトカーテンが形成されている。
【0126】
光走査型光電スイッチ1を起点とした矢印は光走査型光電スイッチ1の光軸を例示的に示す。図28は、第2の車種の自動車W2がゲート100を通過するときには、比較的低い台形の第1のミューティングエリア98(1)が設定され、第1の車種の自動車W1がゲート100を通過するときには、比較的高い台形の第2のミューティングエリア98(2)が設定される。ゲート100を通過する自動車Wの車種の順序が予め決まっているのであれば、この順序に従って車種に対応したミューティングエリア98が車種毎に設定される。
【0127】
図30〜図32は、種類の異なるワークWが搬送される場合に、ワークWの高さをセンサ121〜123で検出することで、ワークWの高さ及びこの高さからワークWの種類が規定されるのであれば、各種のワークWの外形輪郭に整合する複数のミューティングエリア98を設定しておくことで、ワークWに対応したミューティングエリア98を設定する例を示す。
【0128】
図30を参照して、ゲート100には、垂直方向下向きに光走査型光電スイッチ1が設置され、この光走査型光電スイッチ1の光軸によってゲート100の開口に反射型のライトカーテンが形成される。その起立した支柱100aに上下に離間して低位置に設置した低位センサ121、中位置に設置した中位センサ122、高位置に設置した高位センサ123が配設され、ゲート100に入る前に、つまり、光走査型光電スイッチ1の光軸により形成されているライトカーテンを通過する前に、この低位、中位、高位のセンサ121〜123のON/OFFの組み合わせによってワークWの高さ及びこれに基づいてワークWの種類を判断して、ワークWの外形輪郭に対応したミューティングエリア98(1)〜98(4)に切り替える制御例を示す。
【0129】
図31(a)は、低位、中位、高位の高さの異なる位置に配設したセンサ121〜123が全て入光した場合を示す。この場合には、低位センサ121にも干渉しない程度のワークWであるとして、比較的高さの低い第1のミューティングエリア98(低)或いは実質的にミューティングエリアが存在しない第1のミューティングエリア98(低)が設定される。
【0130】
図31(b)は、低位、中位、高位の高さの異なる位置に配設したセンサ121〜123のうち低位センサ121がワークWと干渉して遮光した場合を示す。この場合には、低位センサ121の配設高さよりも高いが中位センサ122の配設高さよりも低いワークWであるとして、高さが中程度の第2のミューティングエリア98(中)が設定される。
【0131】
図32(c)は、低位、中位、高位の高さの異なる位置に配設したセンサ121〜123のうち低位センサ121と中位センサ122がワークWと干渉して遮光した場合を示す。この場合には、中位センサ122の配設高さよりも高いが高位センサ123の配設高さよりも低いワークWであるとして、高さが比較的高い第3のミューティングエリア98(高)が設定される。
【0132】
図32(d)は、低位〜高位までセンサ121〜123の全て遮光した場合を示す。この場合には、高位センサ123にも干渉する高さの高いワークWであるとして、高さの最も高い第4のミューティングエリア98(極高)が設定される。この第4のミューティングエリア98(極高)は、保護領域Aの全部の領域であってもよい(「全ミュート」)。
【0133】
このように、光走査型光線スイッチ1の保護領域Aに複数の任意のミューティングエリア98を用意し、適したミューティングエリア98を必要なタイミングで必要な時間設定し、別のミューティングエリア98が適当であれば、この別のミューティングエリア98に切り替えるようにしてもよい。
【0134】
なお、低位、中位、高位のセンサ121〜123の出力は、一旦ON状態(ワークW検知状態=遮光状態)になると、その後、入光しても直ぐにOFF状態に遷移しないで、予め設定された所定の期間入光し続けた後にOFF状態に変化する。この所定の期間は、ワークWが光走査型光電スイッチ1の光軸によって形成されるライトカーテンを完全に通過した後に、低位、中位、高位のセンサ121〜123の出力がOFFするようにユーザによって設定されている。
【0135】
図30乃至図32を参照して説明した例では、保護領域Aの中にミューティングエリア98を設ける共に、ミューティングエリア98として複数のエリアを用意して、適宜ミューティングエリア98を切り替えるようにしてある。この変形例として、例えば図31(a)のミューティングエリア98(低)を除去した領域を保護領域Aとして設定し、この保護領域Aに付加してミューティングエリア98(低)を追加するようにしてもよい。勿論、図31(b)のミューティングエリア98(中)を除去した領域を保護領域Aとして設定し、この保護領域Aに付加してミューティングエリア98(中)を追加するようにしてもよい。図32(c)についても同様であり、ミューティングエリア98(高)を除去した領域を保護領域Aとして設定し、この保護領域Aに付加してミューティングエリア98(高)を追加するようにしてもよい。また、図32(d)についても同様であり、ミューティングエリア98(極高)を除去した領域を保護領域Aとして設定し、この保護領域Aに付加してミューティングエリア98(極高)を追加するようにしてもよい。
【0136】
そして、低位センサ121、中位センサ122、高位の高さの異なる位置に配設したセンサ121〜123が全て入光した場合には、図31(a)に関連して説明した保護領域A(第1ミューティングエリア98(低)付き)を設定し、低位センサ121がワークWと干渉して遮光した場合には、図31(b)に関連して説明した保護領域A(第2ミューティングエリア98(中)付き)に切り替えて設定するようにしてもよい。更に、低位センサ121と中位センサ122がワークWと干渉して遮光した場合したときには、第3ミューティングエリア98(高)付き保護領域Aに切り替えて設定し、低位〜高位までセンサ121〜123の全て遮光したときには、第4ミューティングエリア98(極高)付き保護領域Aに切り替えるようにしてもよい。
【0137】
保護領域の切替え制御:
ミューティングエリア無しに複数の保護領域A(1)〜A(3)を設定しておき、所定の順序で保護領域Aを切り替えるようにしてもよい。図33はその適用例を説明するための図である。工場内など決められた通路を自走する台車130の先端に光走査型光電スイッチ1を設置しておき、通路131の状態に対応して保護領域A(1)〜A(3)を切り替えるようにしてもよい。この場合、3つの保護領域A(1)〜A(3)を設定したとすると、この保護領域A(1)〜A(3)の切り替え順序を台車130からの入力信号(台車130の動作)に連係して予め設定できるようにしてもよい。この図33の例であれば、保護領域Aの切替え順序としてA(1)→A(2)→A(3)→A(1)に設定し、この保護領域Aの切替えは、例えば台車130のタイヤの向きに連動した台車130からの信号に基づいて実行するように設定できるのがよい。
【0138】
また、保護領域Aの切替えに際して台車130の停車を伴う場合には、一時的に、レーザ光の出射を停止する機能つまり投光停止機能を備えているがよい。これにより安全出力がOFFとなるため台車130へは動作不許可信号が供給されることになるが、台車130はレーザ光の出射を停止する前に停車しているため、実質的な不都合はない一方で他の光電スイッチとの不要な光の干渉を防止することができる。
【0139】
複数系統出力:
上述したように安全装置としての光走査型光電スイッチ1はミューティング機能を備えている。光走査型光電スイッチ1は、多光軸光電スイッチと同様に他にも幾つかの機能が提案され、また、今後の開発される可能性を含むが、一例としてインターロック機能を挙げることができる。インターロック機能とは、光走査型光電スイッチ1の安全出力がOFF状態(動作不許可)からON状態(動作許可)に自動的に変化するのを阻止する機能であり、このインターロック機能により、機械が意図せずに起動又は再起動するのを防止するのに役立てられる。
【0140】
また、光走査型光電スイッチ1にはスタートインターロック機能とリ・スタートインターロック機能が用意される。スタートインターロック機能とは、光走査型光電スイッチ1に電源を投入したとき又は停電後に復電したとき、手動でスタートインターロックをリセットするまで安全出力をOFFに保持する機能である。リ・スタートインターロック機能とは、光走査型光電スイッチ1が運転中に安全出力がOFF状態になったときに、手動でリ・スタートインターロック機能を解除するまで安全出力をOFFに保持する機能である。また、これらの機能は動作モードに応じて夫々個別的に有効とするか無効とするかを選択することができる。例えば、マニュアルスタート・マニュアル・リ・スタートモードであれば、両方のインターロック機能が有効となり、マニュアルスタート・オート・リ・スタートモードであれば、スタートインターロック機能が有効となり、リ・スタートインターロック機能が無効となり、オートスタート・オート・リ・スタートモードであれば、両方のインターロック機能が無効となる。
【0141】
光走査型光電スイッチ1は複数系統の出力を有するのがよく、各系統の出力毎に、ミューティング機能、インターロック機能などの各種安全機能や動作モードをユーザが設定できるのがよい。図34はその一例を示す。防護柵3で包囲された危険領域の中に作業ロボット2が設置され、この作業ロボット2は作業台140の上でワークWに対する作業を行う。この作業ロボット2には、これを挟んで左右にワーク搬送台141a、141bを有し、各ワーク搬送台141a(又は141b)はレール142a(又は141b)に案内されて前後に自走する。各ワーク搬送台141a(又は141b)は、作業ロボット2に接近した第1位置と、作業ロボット2から離れて外部とアクセス可能な出入口142に接近した第2位置とを取ることができ、この第2位置で作業者がワークをワーク搬送台141a(又は141b)に載置し、ワークWを受け取ったワーク搬送台141a(又は141b)は第1位置に移動する。作業ロボット2は第1位置のワーク搬送台141a(又は141b)からワークを受け取り、そして、受け取ったワークWを作業台140で処理する。
【0142】
左右の出入口143a、143bの近傍には、夫々、光走査型光電スイッチ1によって保護領域A(a)、A(b)が設定されている。この光走査型光電スイッチ1には、各出入口143a(又は143b)の近傍に配設された第1、第2のミュートセンサ101a(又は101b)、102a(又は102b)からの信号が入力される。
【0143】
光走査型光電スイッチ1は第1、第2の出力系統145、146を有し、第1の出力系統145はワーク搬送台141の駆動源に接続され、第2の出力系統146は作業ロボット2の駆動源に接続されている。光走査型光電スイッチ1の第2出力系統146はミューティング機能を有する(図35)。第1出力系統145は保護領域Aに物体M(例えば作業者)が侵入すると安全出力としてOFF信号がワーク搬送台141に向けて出力される。第2出力系統146はミューティング機能が設定され、ミューティング機能が動作しているときには、保護領域Aに例えば作業者が侵入しても、この侵入検知に関わらず安全出力としてON信号(安全信号)が作業ロボット2に出力される。
【0144】
第1、第2のミュートセンサ101a(又は101b)、102a(又は102b)がワーク搬送台141a(又は141b)を検知すると、光走査型光電スイッチ1のミューティング機能が動作し、第1、第2のミュートセンサ101a(又は101b)、102a(又は102b)がワーク搬送台141a(又は141b)を検知していないときにはミューティング機能の動作は停止する。
【0145】
図34に戻って、図34には、右側のワーク搬送台141aが第2位置に位置しており、このワーク搬送台141aによって右側出入口143aが塞がれた状態になっている。この右側のワーク搬送台141aによって第1、第2のミュートセンサ101a、102aは遮光状態となり、これにより光走査型光電スイッチ1の第2出力系統146はミューティング動作中となる。したがって、右側の保護領域A(a)に作業者が入ってワークを右側のワーク搬送台141aに載置し、また、右側のワーク搬送台141aの上の加工済みのワークWを受け取る作業を行ったとしても、第2出力系統146はミュート中であるため安全信号が作業ロボット2に供給され、作業ロボット2は作業を行うことができる。他方、第1出力系統145は保護領域A(a)に作業者が侵入していることから警報信号が生成されて右側のワーク搬送台141aに警報信号が出力され、これにより右側のワーク搬送台141aは動作停止の状態なる。もっとも、右側のワーク搬送台141aは右側出入口143aの近傍で停止した状態にあることから、光走査側光電スイッチ1から警報信号を受け取ったとしても動作停止状態であることに変わりはないので不都合はなく、一方、不意なワーク搬送台141aの動作を防止できるため、ワーク搬送台141aにより塞がれていた右側出入口143aが開放した防護柵3内への侵入経路ができてしまうのを防止することができる。
【0146】
左側のワーク搬送台141bは作業ロボット2に隣接した位置にあり、左側出入口143bは開放された状態にある。この左側出入口143bの近傍領域は光操作型光電スイッチ1によって保護領域A(b)が設定されていることから、この左側保護領域A(b)に作業者が侵入すると、直ちに、第1、第2の出力系統145、146を通じて左側作業台141b及び作業ロボット2に警報信号が出力され、左側作業台141b及び作業ロボット2が緊急停止される。
【0147】
仮に、光走査型光電スイッチ1が1系統出力しか有していないときには、これを分配してワーク搬送台141及び作業ロボット2に光走査型光電スイッチ1の出力を接続したときには、ワーク搬送台141aの不意な動作を防止するためにはミューティング機能を使用することはできず、保護領域Aに作業者が入り込んで作業する間は、作業ロボット2の動作が保護領域Aにいる作業者に危険を及ぼすものではないにもかかわらず作業ロボット2を停止させることになり、稼働率を下げることになる。光走査型光電スイッチ1が例えば第1、第2の出力系統を有し、光走査型光電スイッチ1にミュート設定されたとしても、作業ロボット2に接続された第2出力系統に対してだけミューティング機能を働かせる設定を行い、ワーク搬送台141に接続された第1出力系統145にはミューティング機能を働かせない設定を行うことで安全性を確保しながら作業ロボット2の稼働率を高めることができる。
【0148】
また、上述した例以外にも、例えばワーク搬送台141a、141b及び作業ロボット2が同期動作しており、ワーク搬送台141a、141bにはワークWを保持するための図示しない電動クランプが設置されている場合、前述した第1出力系統145が電動クランプの動力源に接続され、前述の第2出力系統146が同期動作する作業ロボット2及びワーク搬送台141aに接続されることで、作業ロボット2を動作させたままで電動クランプへのワークWの受け渡し、ワークWの交換、電動クランプからワークWの取り外しを作業者が安全に行うことができる。なお、ワーク搬送台141aへは前述の例とは異なり不意なワーク搬送台141aの動作により、ワーク搬送台141aにより塞がれていた右側出入口143aが開放して防護柵3内への侵入経路ができてしまう虞があるが、この場合、ミュートセンサ101aが非検知状態(入光状態)となるためミューティング状態が解除される。したがって、このミューティング解除の時点で、作業ロボット2及びワーク搬送台141aが緊急停止することで作業者の安全を担保することができる。
【0149】
ここに、緊急停止とは、リ・スタートインターロック機能を有効化していることを意味しており、第2出力系統146に対してリ・スタートインターロック機能が有効化されている。上述の2例において、第2出力系統146がOFF状態になるときは、ワーク搬送台141aにより塞がれていた右側出入口143aが開放して防護柵3内への侵入経路ができている虞があるため、保護領域Aに侵入した作業者により第2出力系統146がOFF状態になった後、作業者が保護領域Aから退避したとしても、光走査型光電スイッチ1は物体Mが保護領域Aに存在しないことは確認できるものの、作業者が防護柵3よりも外側に退避したのか、それとも侵入経路を通じて防護柵3内に侵入してしまったかまでは確認できない。そこで、第2出力系統146に接続された機械(危険源)の再起動は自動的に行わず、人による人為的な安全確認の後に、光走査型光電スイッチ1はリセット手動入力を受け付けることで始めて第2出力系統146をON状態にするか否かを判断する。
【0150】
その一方で、第1出力系統145は作業者が正規の作業を行うときでもOFF状態になり、また、正規な状態において侵入経路はワーク搬送台141aにより塞がれていることから光走査型光電スイッチ1により物体Mが保護領域Aに存在していないことを確認できれば作業者が防護柵3の外側に退避したとみなせるため、第1出力系統145に接続された機械(危険源)の再起動が自動的行われるのが好ましい。つまり、機械(危険源)は通常停止であることから、作業者が保護領域Aから退却した段階で機械(危険源)が自動的に再起動するのが好ましいし、また、作業効率もよい。したがって、第1出力系統145についてはリ・スタートインターロック機能を無効化する、つまりマニュアルスタート・オート・リ・スタートモード或いはオートスタート・オート・リ・スタートモードを設定するのがよい。これに対して、第2出力系統146は緊急停止を伴うことから、作業者が保護領域Aから退却したとしても機械(危険源)が自動的に再起動するは望ましくない。したがって、第2出力系統146はリ・スタートインターロック機能を有効化することで、マニュアルスタート・マニュアル・リ・スタートモードで動作させるのが好ましい。なお、多出力系統のうち、インターロック機能が有効化されたいずれか一つの出力系統がOFF状態になった場合は、緊急停止とみなして、他の出力系統もOFF状態にするように構成してもよい。これにより通常作業時には自動再起動の利便性が得られると共に緊急停止時には全ての出力系統がOFF状態となり、少なくともリセットの手動入力があるまではON状態に変化しないため安全性の確保を担保できる。
【0151】
上述したように、光走査型光電スイッチ1に対してユーザが設定可能な各種の機能やモードに関して、光走査型光電スイッチ1が複数の出力系統を備え且つ各出力系統毎に機能やモードを設定できることで単体の光走査型光電スイッチ1が様々な状態に合理的に対応することができる。
【0152】
また、1つの保護領域A(1)が設定された例を示したが、これに限らず、第1、第2の出力系統145、146の夫々について保護領域をユーザの設定によって別々に割り当てるように構成してもよい。保護領域を別々に割り当てる構成の場合に同一位置で同一形状の保護領域を設定できるように、一方の保護領域の設定を他方の保護領域の設定に反映できるように構成してもよいし、同一位置で同一形状の保護領域を設定するための設定モードを設けるように構成してもよい。更に、第1、第2の出力系統145、146は、夫々、同一の出力状態(ON状態/OFF状態)を示す2つの出力(OSSD1、OSSD2、OSSD3、OSSD4)で構成されているのがよい。各出力は、ON状態のときには、瞬間的に(各出力に接続される外部デバイスが、その出力がOFFになったことを認識しない程度の時間で)OFFとなる自己診断パルスつまり検査信号を重畳し、故障検知手段58は各出力がいつでもOFFできるかを確認される。
【0153】
また、図36に示すように、検査信号である自己診断パルスを重畳するタイミングを各出力で互いに異ならせる、つまり時分割で異なるタイミングで重畳させることで、故障検知手段58が、各出力が短絡していないことを確認できるように構成するがよい。換言すれば、安全出力同士で短絡が発生したとしても故障を検知することができる。
【0154】
自己診断パルスによる安全検出手段は、動作許可を示す安全信号を出力しているときに、この安全信号に重畳した検査信号に基づいて不許可を示す安全信号が出力可能であるか否かを出力デバイス(OSSD)単位で判定し、出力が可能でない(出力不可能)と判定すると動作許可を示す安全信号に代えて動作不許可を示す安全信号を出力することで、少なくとも同一出力系統の他の出力デバイス(OSSD)により動作不許可を示す安全信号が外部機械(危険源)に出力されることから、外部機械は、動作不許可信号を受け付けるか、あるいは、同一出力系統の出力デバイス(OSSD)のON/OFF論理不一致により、安全が確認できないことを認識できる。これにより光走査型光電スイッチ1の安全性が担保される。
【0155】
複数系統出力と検出能力の個別設定:
光走査型光電スイッチ1が複数の出力系統を具備するときに、検出感度を含む検出能力についても各出力系統毎にユーザが設定できるようしてもよい。図2でも例示したように、検出能力を出力系統毎に設定する点について具体的に説明すると、検出能力として通常の能力に設定された第1保護領域A1(通常能力)と、この第1保護領域A1の周囲を含み且つ高い能力に設定された第2保護領域A2とがユーザによって設定されているとする。この場合に、第2保護領域A2に対応する第2安全出力がON状態のときには機械(ロボット)の駆動源(モータ)は通常の速度で動作し、この第2保護領域A2に対応する第2安全出力がOFF状態のときは機械(ロボット)の駆動源(モータ)は低速で動作するように設定し、その一方で、第1保護領域A1に対応する第1安全出力がON状態のときには機械(ロボット)の駆動源(モータ)には電力を供給し、この第1保護領域A1に対応する第1安全出力がOFF状態のときは機械(ロボット)の駆動源(モータ)に電力を供給しないように設定することができる。特に、高速動作する機械や高慣性力(高イナーシャ)の機械の場合、モータへの電力供給を遮断したとしてもモータは急停止することができないため、機械に対して第1保護領域A1よりも遠方まで拡大した第2保護領域A2で、対象物(物体M)を検知したときに機械(モータ)を低速動作に変化させることで、第1保護領域A1で対象物(物体M)を検知した時点で機械(モータ)を急停止することが容易になる。したがって、2系統出力の各々に検出能力をユーザの手で設定可能にすることで、安全性を担保したままで機械の通常の動作のときの速度を高速化することができる。
【0156】
ここに、設定可能な検出能力とは、検出感度の他に、応答時間、最小検出体、受光感度などを含む。応答時間とは、所定時間あるいは所定回数連続して保護領域A内の物体Mを検知して初めて光走査型光電スイッチ1が保護領域A内に物体Mが存在すると判定するときの所定時間あるいは所定回数連続する時間に相当する設定条件である。したがって、応答時間が短いと検出能力が高くなり、応答時間が長いと検出能力は低くなる。最小検出体は、光走査型光電スイッチ1が確実に検出し得る検出体のサイズのうち最小のものであり、光走査型光電スイッチ1の光軸密度に依存するものである。設定した最小検出体が小さい(光軸密度が高い)と検出能力は高くなり、設定した最小検出体が大きい(光軸密度が低い)と検出能力は低くなる。例えば1走査毎の物体を検出する光軸数を設定し、設定した光軸数以上で物体Mを検知して始めて光走査型光電スイッチ1が保護領域A内に物体Mが存在すると判定するように構成することで、実質的に光軸密度を変化させ、検出能力を変化させることができる。受光感度は、受光信号の増幅率や受光信号に対するしきい値のことであり、増幅率を下げたりしきい値を下げることで検出能力は高くなり、増幅率を下げたりしきい値を上げることで検出能力は低くなる。
【0157】
検出能力と安全機能(ミューティング機能等)とを分けて複数系統出力との関係を説明したが、検出能力と安全機能を複合して各出力系統毎に設定できるのは言うまでもない。複数の出力系統に対して各出力系統毎に個別に検出能力を設定することに関しては、光走査型光電スイッチ1に限らず多光軸光電スイッチや単一の光軸の光電スイッチなどの安全機器にあっても有効であるのは勿論である。例えば多光軸光電スイッチを地面に対して水平に設置し、第1安全出力を機械(危険源)に近い側の一又は複数の光軸を割り当て、第2安全出力を機械(危険源)から遠い側の一又は複数の光軸を割り当てることで、上記の例と同様に第1安全出力を通常の検出能力に設定し、第2安全出力を相対的に高い検出能力に設定することができる。ここに、検出能力とは、応答時間、最小検出体、受光感度などを意味するのは上述したとおりである。
【0158】
他方、複数の出力系統に対して各出力系統毎に個別に安全機能を設定することに関しては、光走査型光電スイッチのように物体Mの位置を検出する安全機器に有効であり、光走査型光電スイッチの他に、安全画像スイッチを挙げることができる。画像素子を内蔵した安全画像スイッチの場合、撮像した二次元画像に対して第1、第2の安全出力に対する保護領域を設定し、或いは1又は複数の安全画像スイッチで撮像した二次元画像から認識される三次元の最大保護空間に対して保護空間を設定して第1、第2の出力系統に対して個別に安全機能を設定すればよい。
【0159】
上記の例では、光走査型光電スイッチ1は、複数系統出力の各系統毎にミューティング機能やインターロック機能などの安全機能の設定や、応答時間、最小検出体や受光感度などの検出能力の設定を行うように構成されているが、更に、他の系統出力の出力状態をそのまま反映して、重畳する自己診断パルスのみを各出力独自にできる設定条件を選択できるように構成してもよいし、その系統出力をOFF状態固定とする条件設定をユーザが選択できるようにしてもよい。このことは安全画像スイッチについても同様である。
【0160】
光電スイッチ間の干渉対策:
図33を参照して前述したように、例えば走行台車130に光走査型光電スイッチ1を搭載した場合に、通路131の近傍に他の光走査型光電スイッチ1が設置されていると、台車1が移動する過程で、台車130の光走査型光電スイッチ1と、通路131の近傍に定置されている他の光走査型光電スイッチ1との間で干渉が発生する可能性がある。勿論、この例は単なる一例であり、複数の走行台車130の間でも、複数の台車130が互いに接近したときにこれら台車130に搭載されている光走査型光電スイッチ1間で干渉の問題が発生する可能性がある。他の例として挙げれば、定置されている複数の光走査型光電スイッチ1の間でも干渉の問題が発生する場合もある。この問題は光走査型光電スイッチ1間に限定されず、光走査型光電スイッチ1と他の種類の光電スイッチ(光電センサと同意義)との間でも干渉の問題を発生する可能性がある。
【0161】
図37は、隣接する2つの光走査型光電スイッチ1A、1Bの各々が投光したレーザ光が入光して干渉する場合と、周囲の構造物で反射したレーザ光が入光して干渉する例を示しおり、図38には、2つの光走査型光電スイッチ1A、1Bが干渉するときの投光パルスのタイムチャートである。隣接する光走査型光電スイッチ1、1間の干渉の問題が発生したときには、対象物(物体M)までの距離を正しく計算できないという問題を誘発する原因となる。
【0162】
光走査型光電スイッチ1は次のパラメータで動作するように設定されている。
(1)光走査型光電スイッチ1は、前述したように円周方向に等間隔に配設した複数のスリットを光が通過する原理を用いた光電式ロータリエンコーダ25を備えているが、このエンコーダ25の出力を使って投光素子LDの投光タイミングが規定されている。このことから、角度分解能は前述したように0.36°であり、(2)回転周期(スキャン周期)は30msであり、(3)投光周期は30μsである。すなわち、1周360°において0.36°毎に投光動作を行うときには、1周360°で合計1000回の投光動作を実行することになる。そして、1周の回転周期(スキャン周期)として30msを設定したときには、投光周期は{30ms/1000}であり、つまり30μsとなる。スキャン周期つまり走査ミラー14が1回転する周期はモータ24の回転速度によって規定される。
【0163】
図39は、光走査型光電スイッチ1が光軸中心から放射状にレーザ光を投光する様子を示しており、図40は投光パルスのタイムチャートであり、この図40の時間レンジを約30ms(1回転周期)まで投光パルスを描いたのが図41である。
【0164】
光走査型光電スイッチ1と、これに隣接する光電スイッチ(光電センサと同意義)との間の干渉を回避する一つの手法を図42に示す。図42は、第1、第2の光走査型光電スイッチ1A、1Bの投光パルスのタイムチャートを示す。この図42から理解できるように、第1、第2の光走査型光電スイッチ1A、1Bの投光パルスの周期は、第1の光走査型光電スイッチ1Aでは30μsに設定されているのに対して、第2の光走査型光電スイッチ1Bでは33μsに設定されており、投光パルスのパルス幅は同じであり、パルス幅を同じにすることで検出感度の影響を抑えることができる。このように第1、第2の光走査型光電スイッチ1A、1Bとの間で異なる投光周期を設定することで、仮にいずれかの光軸で相互干渉が発生したとしても、次のスキャンでは互いに回転周期に36°の位相差が生じるため、複数回のスキャンで連続して干渉することはない。ちなみに、光電スイッチでは、ノイズや浮遊物による誤作動を回避するために複数化の検知で初めて出力を変化させるのが一般的であり、したがって、複数の光電スイッチ間で異なる投光周期を設定することで、実用上、隣接する光電スイッチ間での干渉による誤検出を防止することができる。なお、光走査型光電スイッチ1では、反射光を走査ミラー14で受けた後に受光レンズ20で集光して受光信号を獲得するのが一般的であることから、受光タイミングが同じであったとしても光走査型光電スイッチ1の向きにズレがあれば、一般的に言えば干渉の問題を生じることはない。
【0165】
図43は光走査型光電スイッチ1の基本構成をブロック図的に示す図であり、この図43の光走査型光電スイッチ1は前述の2出力系統(図35)を備えている。投光パルスの周期は、モータ24の回転速度を設定すればよく、これは制御手段30の投受光タイミングを、典型的には外部PCを使って設定すればよい。勿論、光走査型光電スイッチ1の液晶表示部34に設定事項を表示してユーザが操作ボタン36を操作することにより投受光タイミングを設定できるようにしてもよい。設定した投受光タイミングつまり投受光周期は、光走査型光電スイッチ1の内部メモリ147に、設定保護領域A等と一緒に記憶される。
【0166】
図44は、複数の光電スイッチ間の干渉を回避するための第2の手法を説明するための図である。この図44の例は、第1〜第4の四機の光走査型光電スイッチ1A〜1Dが互いに同期線で接続されていることを前提としている。すなわち、第1〜第4の光走査型光電スイッチ1A〜1Dは同期線からの信号で互いにタイミングが規定されており、投光パルスに位相差を設定することで、この第1〜第4の光走査型光電スイッチ1A〜1D間の干渉を防止することができる。投光パルスの位相差として、光走査型光電スイッチ1が投光してから受光信号を取り込むタイミングが2μsであるのが一般的であるとすると、位相差として3μsを設定すれば干渉の問題を解消することができる。
【0167】
図45は、複数の光電スイッチ間の干渉を回避するための第3の手法を説明するための図である。この図45の例は、隣接する二機の光電スイッチ1、1間で干渉が発生し、これを検知したときに、次の光軸以降の投光タイミングに関して、何れか一方又は双方の光電スイッチの投光タイミングを変更することで位相差を設けることを提案するものである。干渉を検知する手法として、例えば、特定の光軸で不連続に受光を検出するものの複数回連続して受光を検出しない、その頻度が所定の頻度以上であるときに光電スイッチ間での干渉とみなすようにしてもよい。勿論、変形例として、干渉を検知したときに、図42で説明した投光パルスの周期や投光周期(モータ24の回転速度)を変更する制御を加えるようにしてもよい。干渉の検出に関し、上述した例の他に、後に図51のフローチャートを参照して投光から受光までの時間差tに基づいて干渉している可能性があると判断したときに、投光パルスの周期や投光周期(モータ24の回転速度)を変更する制御を加えるようにしてもよい。
【0168】
隣接する光走査型光電スイッチ1、1間の干渉を防止するのに、上述したようにモータ24の回転速度を異ならせることでスキャン周期を隣接する光走査型光電スイッチ1、1間で異ならせるのが上述した3つの手法であるが、変形例として、光走査型光電スイッチ1の投光タイミングをクロック制御するのであれば、光走査型光電スイッチ1の投光タイミングの周期を隣接する光走査型光電スイッチ1、1間で異ならせるようにしてもよい。すなわち、投光パルスの周期を隣接する光走査型光電スイッチ1、1間で異ならせる構成を採用してもよい。
【0169】
また、光走査型光電スイッチ1のモータ24の回転速度又は投光パルスの周期の設定変更ことに関して、外部パーソナルコンピュータPCによることなく、上述したように光走査型光電スイッチ1の液晶表示部34と操作ボタン36とを使って外部パーソナルコンピュータPC無しに行うことができるようにしてもよい。後に図48を参照して説明するように、この光電スイッチ1は、幾つかのパラメータについて液晶表示部34と操作ボタン36を使って設定できるようになっているが、このパラメータの設定事項の一つに、モータ24の回転速度又は投光パルスの周期を加えることで、外部パーソナルコンピュータPCを使うことなく、ユーザが隣接する光走査型光電スイッチ1、1間の干渉を防止することができる。また、光走査型光電スイッチ1の内部メモリ147(図43)に複数の投光パルスの周期又は複数の投光パルスの周期を記憶させておき、この中からユーザが任意に選択して、所望の投光パルスの周期又は複数の投光パルスの周期を設定できるように構成してもよい。勿論、前述した投光から受光までの時間差tに基づいて干渉している可能性があると判断したときに(図51)、投光パルスの周期や投光周期(モータ24の回転速度)を内部メモリ147に記憶されている他の投光パルスの周期や投光周期(モータ24の回転速度)に切り替える制御を行うようにしてもよい。
【0170】
図37乃至図45を参照して他の光電スイッチ(光電センサ)との干渉の問題を解消する手法を説明したが、これ以外の外乱光による問題がある。光走査型光電スイッチ1の反射光に外乱光が重畳すると誤った位置情報を検出してしまうという問題に至り易い。この問題に対処するために、光走査型光電スイッチ1は、(1)光学フィルタの機能を有する光透過カバー62を採用し、(2)フィルタ回路を採用して対象物(物体M)からの反射光以外の周波性成分の信号を除去することが行われているが完全という訳ではない。
【0171】
外乱光による影響を受ける可能性がある場合、ユーザは光走査型光電スイッチ1の取り付け角度や取り付け高さを調整することになるが、この調整を行うに際して、外乱光がどの方向から入射しているかを確認できれば好都合である。また、調整後に外乱光の影響が無くなったか否かを確認できれば、光走査型光電スイッチ1の誤動作が発生する毎に光走査型光電スイッチ1の設置位置の調整を繰り返す必要性も無くなる。前述したように光電スイッチは、複数回の計測値つまり測距値が連続して保護領域Aの内側にあることを検知した後に出力を変化させるように設定するのが一般的であるため、外乱光が直ちに誤動作を誘発することに至らないにしても、検出能力が劣化した状態(応答時間が長くなった状態)で動作している可能性があり、このことは安全機器としての光走査型光電スイッチ1としては好ましくない。
【0172】
光走査型光電スイッチ1は、(1)「運転モード」、(2)「モニタモード」、(3)「設定モード」の3つの動作モードを有し、動作モードを切り替えると、光走査型光電スイッチ1の液晶表示部34には図46の表示に切り替わる。この図46は、液晶表示部34の表示の遷移図であり、図46の参照符号34(a)は運転モードで動作中の表示を示し、参照符号34(b)はモニタモードのメニュー画面を示し、参照符号34(c)は設定モードのメニュー画面を示す。
【0173】
前述した図6(b)を参照して、ユーザインターフェース部36には、液晶表示部34に隣接して、操作ボタン36a〜36eが配設されている。上下ボタン36a、36bは、数値入力や表示画面切替えのためのキーである。例えば、上ボタン36aは、数値をインクリメントするアップキーとして用いることができる。また、下ボタン36bは、数値をデクリメントするダウンキーとして用いることができる。液晶表示部34の下方且つ隣接して3つの操作ボタン36c〜36eが横並びに配列されているが、これらの操作ボタン36c〜36eは動作モードの切替えや設定値確定のためのキーとして用いられる。例えば、中央操作ボタン36cはモード切替えに用いられ、右の操作ボタン36eはエンター(Enter)キーであり、左の操作ボタン36dは、エスケープ(Esc)キーである。
【0174】
「運転モード」が選択されると光走査型光電スイッチ1は侵入物Mの検知を実行する。「運転モード」から「モニタモード」ヘの切替えは、中央操作ボタン36c操作することによって行うことができる。また、「モニタモード」での動作中に、左の操作ボタン36d(Escキー)を操作することで「運転モード」に復帰させることができる。
【0175】
図47を参照して、「モニタモード」は、入出力状態、エリア監視状況、検知履歴などを表示する動作モードである。入出力状態としては、光走査型光電スイッチ1の安全出力の状態、外部リレー回路からの入力状態などを液晶表示部34に表示してモニタすることができる。エリア監視状況としては、設定されている監視エリアの形状、サイズ、検知された侵入物までの距離などをモニタすることができる。検知履歴としては、安全出力がオフ時の検知履歴として、動作不許可信号を出力させるトリガとなった侵入物の位置及び検知された時刻と、エラー情報などが保持される。このエラー情報の履歴には、安全出力がOFFした時刻及びOFFした要因(何故、安全出力がOFFになったのかその原因)が含まれ、また、外乱光が原因で安全出力がOFFしたときには、外乱光の方位を規定する光軸番号がエラー情報の履歴に含まれる。
【0176】
検知履歴は、最新のものから順に表示させることができる。この様な検知履歴は、最大で20件保持され、新たな検知履歴が得られるごとに最も古いものから順にクリアされる。侵入物の位置情報としては、例えば、光走査型光電スイッチ1を中心とする直交座標を用いて、侵入物の位置を示す数値が表示される。また、セーフティセンサ1から侵入物までの距離Dを示す数値が表示される。また、エラー情報としては、例えば、光透過カバー62の汚れや出力短絡などによる不具合の発生を示す情報が表示される。また、履歴情報としては、位置情報、エラー情報の他に、外部機器からのチェック入力を示す情報がある。このチェック入力は、安全出力が正しくオフするか否かを確認するための外部入力である。
【0177】
「設定モード」は、保護領域Aを指定するためのパラメータや外部入力の設定が行われる動作モードである。運転モードから設定モードヘは、中央操作ボタン36c操作することによって行うことができる。また、「設定モード」での動作中に、左の操作ボタン36d(Escキー)を操作することで「運転モード」に復帰させることができる。設定スタート画面には、選択可能なメニュー項目が配置され、上下操作ボタン36a、36bを操作することによって所望のメニュー項目を選択することができる。
【0178】
図48は、設定モードにおいてパラメータの設定に関する表示画面の一例が示されている。設定変更が可能なパラメータは、再スタート設定、EDM、検知分解能、応答時間などを含む。再スタートつまりリ・スタートは、光走査型光電スイッチ1を手動で再スタートさせるか自動で再スタートさせるかを選択することができる。EDMに関しては、外部リレーモニタ機能をオンするかオフするかを選択することができる。侵入物(物体M)の検知分解能は所定の範囲内で任意に指定することができる。
【0179】
光走査型光電スイッチ1に接続した外部パーソナルコンピュータPC(図13)によってエラー情報の履歴を確認することができる。外部パーソナルコンピュータPCには、エラー情報の履歴を表示するためのアプリケーションがインストールされており、このプログラムを使ってパーソナルコンピュータPCのディスプレイ81に表示させることができる。
【0180】
図49は、パーソナルコンピュータPCによるエラー情報表示に含まれる外乱光の画面表示の例を示す。パーソナルコンピュータPCのディスプレイ81には、その一側に、エラー情報の履歴が時系列に表示される。この一覧表示には、各エラー情報毎に、(1)エラーの原因、(2)エラー発生時刻、(3)好ましくはエラーが発生した光軸番号が含まれる。ユーザが任意のエラー履歴を選択すると、光走査型光電スイッチ1のシンボルBと共に外乱光の方位が目立つ色で表示される。この外乱光に関する表示を、常時表示とするか、常時は非表示としてユーザが希望したときに表示するかをオプションで設定できるようにしてもよい。図49は、パーソナルコンピュータPCが接続された光走査型光電スイッチ1が動作状態にあるときのパーソナルコンピュータPCのディスプレイ81の表示例が図示されており、パーソナルコンピュータPCによって光走査型光電スイッチ1の動作が常時モニタされている状態にある。この図49において、光走査型光電スイッチ1のシンボルSの周囲に見られる黒丸は安全出力がOFF状態となった際の原因箇所の履歴、例えば保護領域A内での物体Mの検出位置の履歴を示す。図49は、シンボルSから上方に扇状に広がるハッチングを付した領域に数多くの外乱光が見られ、この外乱光は、シンボルSから放射状に延びる直線で表示される。したがって、ユーザは、シンボルSから放射状に延びる直線を見ることで外乱光の方位を知ることができる。
【0181】
また、次に説明するように外乱光を検出したときに、これを光走査型光電スイッチ1の液晶表示部34に、図50に例示するように「警告(Alert) 光干渉(Light Interference)」と文字表示するのが好ましい。
【0182】
外乱光の検知方法について説明すると、光走査型光電スイッチ1は、投光した光が対象物(物体M)にぶつかって反射するときに投光タイミングと受光タイミングとの時間差tによって距離を計測し、また、受光した光軸番号によって方位を検知する。また、計測した距離を受光強度によって補正することで、距離の検知の正確性を高めるように設計されるのが一般的である。したがって、投光タイミングと受光タイミングとの時間差tが所定の範囲内であれば、対象物(物体M)による反射光であり正規の光であるとみなすことができる。換言すると、投光タイミングと受光タイミングとの時間差tが非常に小さいときには外乱光であるとみなすことができる。また、投光タイミングと受光タイミングとの時間差tが非常に大きいときにも外乱光であるとみなすことができる。したがって、投光タイミングと受光タイミングとの時間差tが所定の範囲外であるとき、つまり所定の範囲よりも時間差tが小さいとき及び所定の範囲よりも時間差tが大きいときにはエラー履歴に記憶され、また、光走査型光電スイッチ1の液晶表示部34にエラー表示される。また、光走査型光電スイッチ1が方位を示すインジケータを備えているときには、外乱光の方位をこのインジケータによって表示するのが好ましい。
【0183】
安全性の確保において問題になるのが、投光タイミングと受光タイミングとの時間差tが所定の範囲よりも小さいときであり、この場合には、光走査型光電スイッチ1では出力状態をOFFに移行させる処理を実行するのが好ましい。
【0184】
図51は、外乱検知の具体的な手法の一例を示すフローチャートである。前述したように、所定の周期で投光が実行され(ステップS10)、各光軸番号毎に受光の有無が判定される(ステップS11)。そして受光があれば、対応する光軸番号の投光から受光までの時間差tが演算され(ステップS12)、この時間差tが予め設定されている最小時間差Tminと最大時間差Tmaxとの範囲に含まれているか否かの判定が行われる(ステップS13)。そして、YESつまり実際の時間差tが所定の範囲内であれば、ステップS14に進んで、従来と同様に、対象物(物体M)の位置(距離)を計測する。なお、対象物(物体M)の方位は、光軸番号つまり投光時刻によって規定することができる。そして、対象物(物体M)の位置が保護領域であるときにはステップS15からステップS16で光走査型光電スイッチ1の出力をOFF状態に移行させ、また、ステップS17でオフ履歴が作成されてメモリ147(図43)に記憶される。また、警告領域であるときには、ステップS18からステップS19に進んで、警告領域に侵入した作業者に対して例えば赤色ランプの点灯やブザーなどにより警報が行われる。
【0185】
上記ステップS13において、投光から受光までの時間差tが、最小時間差Tminと最大時間差Tmaxとの範囲外であると判定されたときには異常であると判定される。すなわち、このステップS13は異常判定手段を構成し、異常であると判定されたときにはステップS20に進んでエラー履歴が作成され、このエラー履歴はメモリ147(図43)に記憶される。また、ステップS21で、投光から受光までの時間差tが最小時間差Tminよりも小さいときには、光走査型光電スイッチ1に近い領域での現象とみなすことができ安全性を阻害する可能性があるとして、ステップS22に進んで光走査型光電スイッチ1の出力をOFF状態に移行させ、また、ステップS23でオフ履歴(OFF履歴)が作成され、このオフ履歴はメモリ147(図43)に記憶される。なお、ステップS13において異常と判定されたときに液晶表示部34に異常を示す表示が行われる(図50)。
【0186】
ユーザは、エラー履歴及びオフ履歴を参照することで、問題の発生原因が一時的な要因(例えば埃)であるのか継続的な要因(外乱光)であるのかを峻別することができる。外乱光であるとみされるときには、オフ履歴及びエラー履歴を外部パーソナルコンピュータPCを使って外乱情報の詳細を表示することで方位を特定することができ、これにより光走査型光電スイッチ1の設置角度や設置高さを変更することで対処することができる。
【0187】
光走査型光電スイッチ1に液晶表示部34を設けることで、図50を参照して説明したとおり、この液晶表示部34を使ってエラー表示を行うことができ、これを見て必要であればユーザは外部パーソナルコンピュータPCを使って外乱の分析を行うことができるが、図52に図示するように、光走査型光電スイッチ1に方向を指し示すことのできる方位インジケータ160を設け、この方位インジケータ160を使って問題の原因の方位を指し示すようにしてもよい。ちなみに、この図52に例示の光走査型光電スイッチ1は、その頂部に、円弧状に複数のLED160aを等間隔に配置し、外乱の原因の方位に合致するLEDインジケータ160を点灯することで方位を差し示すことができる。
【0188】
光走査型光電スイッチ1の検出感度維持及び調整機構の具体的な調整手順:
図9〜図12を参照して前述した検出感度維持及び調整機構を具体的に説明する。この検出感度維持及び調整機構は、光走査型光電スイッチ1の内部に基準対象物としての2つの反射率の異なる第1、第2の反射面73、74を含んでいる。そして、光走査型光電スイッチ1は、この基準対象物としての第1、第2の反射面73、74を、走査ミラー14の回転において無効範囲つまり測定領域以外の範囲に配設することで、測定領域での走査で用いる投光経路、受光経路、レーザ光源LD、受光素子(光電変換素子)22を共用する構成が採用されている。このことから、走査ミラー14の測定領域以外の無効回転範囲において基準対象物(第1、第2の反射面73、74)に対して投光し、そして、これにより得られる受光信号情報を監視することで光走査型光電スイッチ1の検出感度の劣化を確認することができる。
【0189】
光走査型光電スイッチ1を工場から出荷する際に、光走査型光電スイッチ1が光透過カバー62を検知しない走査範囲、つまりパルス状のレーザ光が第1、第2の反射面73、74を走査しているときに、製品仕様を満足することのできる最適な検出感度が得られるように投光強度及び/又は受光ゲインを調整する。この調整が完了した状態において例えば光軸番号「60」(この光軸番号「60」は第2反射面(白)73に投光したときの光軸番号に相当する)に投光したときの受光強度が「600」であったとすると、この光軸番号60の受光強度「600」をメモリ147(図43)に記憶する。また、例えば光軸番号「10」(この光軸番号「10」は第1反射面(黒)72に投光したときの光軸番号に相当する)に投光したときの受光強度が「100」であったとすると、この光軸番号10の受光強度「100」をメモリ147(図43)に記憶する。
【0190】
上記の工場出荷時の手順を図53に基づいて説明する。先ず、ステップS100で光透過カバー62を通じてパルスレーザ光を対象物に投光したときに得られる受光信号情報を取得して、対象物までの距離を計測する。次いで、ステップS101で、対象物を検知できているか否かを判定して、NOであれば、ステップS102に進んで、投光駆動部150(図43)を制御して投光強度を増加及び/又は電源回路152(図43)の電圧を増加させることで受光素子22の受光ゲインを増加させ、再びステップS100に進んで、調整後の投光強度及び/又は受光ゲインに基づいて対象物までの距離の計測が行われる。そして、ステップS101で対象物を検知できていると判定されたときにはステップS103に進んで、光透過カバー62を通じてパルスレーザ光を対象物に投光したときに得られる受光信号情報を取得して、対象物までの距離を計測する。
【0191】
次のステップS104において、光透過カバー62を検知しているか否かの判定が行われ、このステップS104でYESのときには、投光駆動部150(図43)を制御して投光強度を減少及び/又は電源回路152(図43)の電圧を低下させることで受光素子22の受光ゲインを減少させた後に再びステップS103に進んで、調整後の投光強度及び/又は受光ゲインに基づいて対象物までの距離の計測が行われる。そして、ステップS104で光透過カバー62の検知が認められないときには、投光強度及び受光ゲインを最適値に調整できたとして、ステップS106に進んで、基準対象物の一つである白の第2反射面74へ投光したときの受光強度(「基準受光強度RE(白)」という)をメモリ147(図43)に記憶させる。また、次のステップS107で、基準対象物の他の一つである黒の第1反射面73へ投光したときの受光強度(「基準受光強度RE(黒)」という)をメモリ147(図43)に記憶させる。
【0192】
以上が工場出荷前の手順である。次に、光走査型光電スイッチ1が自律的に検出感度を調整する手順を図54に基づいて説明する。先ず、ステップS200において光軸番号50(白の第1反射面74(図12)へ投光したときに得られる受光強度を取得する。この受光強度は受光部を構成するA/Dコンバータ154(図43)を通じて取得することができる。この取得した受光強度を「実際の受光強度(白)」と呼ぶ。次いで、メモリ147から「基準受光強度RE(白)」を取り込み(ステップS201)、そして次のステップS202で、「実際の受光強度(白)」が「基準受光強度RE(白)」よりも小さいか否かの判定が行われる。このステップS202においてYESと判別されたときには、「実際の受光強度(白)」が低下しているということで、ステップS203に進んで、投光駆動部150(図43)を制御して投光強度を増加及び/又は電源回路152(図43)の電圧を増加させることで受光素子22の受光ゲインを増加させる。そして、次のステップS204で「実際の受光強度(白)」が「基準受光強度RE(白)」よりも大きいか否かの判定が行われ、YESつまり「実際の受光強度(白)」が高くなっているということで、ステップS205に進んで、投光駆動部150(図43)を制御して投光強度を低下及び/又は電源回路152(図43)の電圧を低下させることで受光素子22の受光ゲインを減少させる。
【0193】
次に、光走査型光電スイッチ1が自律的に故障検知する手順を図55に基づいて説明する。ステップS300において光軸番号10(黒の第1反射面73(図12)へ投光したときに得られる受光強度を取得する。この受光強度は受光部を構成するA/Dコンバータ154(図43)を通じて取得することができる。この取得した受光強度を「実際の受光強度(黒)」と呼ぶ。次いで、メモリ147から「基準受光強度RE(黒)」を取り込み(ステップS301)、そして、次のステップS302で、「実際の受光強度(黒)」が「基準受光強度RE(黒)−許容値」よりも小さいか否かの判定が行われる。このステップS302においてYESと判別されたときには、「実際の受光強度(黒)」が異常に低下しているということで、ステップS303に進んで、光走査型光電スイッチ1が故障と判断して、光走査型光電スイッチ1を安全状態へ移行させる。この安全状態の典型的な処理は光走査型光電スイッチ1の出力をOFFに変化させる処理である。また、「実際の受光強度(黒)」が「基準受光強度RE(黒)+許容値」よりも大きいときにもステップS204からステップS303に進んで、光走査型光電スイッチ1が故障と判断して、光走査型光電スイッチ1を安全状態へ移行させる。
【符号の説明】
【0194】
1 光走査型光電スイッチ
L1 レーザ光
L2 反射光
LD 投光素子
10 投光レンズ
11、12 投光用ミラー
14 光走査手段(走査ミラー)
20 受光レンズ
21 受光反射体
22 光電変換素子(受光素子)
24 モータ(走査ミラーを駆動)
30 制御手段
88 設定領域記憶部(記憶手段)
147 光走査型光電スイッチの内部メモリ
Tr 外部入力受付端子
【技術分野】
【0001】
本発明は安全光電スイッチに関する。
【背景技術】
【0002】
特許文献1、2に見られるように、光を二次元的に走査して物体を検出すると共にこの物体の位置を検出する光走査型光電スイッチが知られている。この光走査型光電スイッチは、安全スキャナ、セーフティレーザスキャナ等とも呼ばれている通り、危険源としての機械やロボットなどの周囲に保護領域を設けて、この保護領域に作業者等が侵入したときに、危険源に動作不許可の安全信号を出力する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平4−310890号公報
【特許文献2】特開03−175390号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
光走査型光電スイッチは、上述したように、物体の位置を検出することで、ユーザが設定した保護領域に物体が侵入したか否かを検知するものである。この保護領域の設定に関して、予め複数の保護領域を設定しておき、これを外部入力に基づいて保護領域を切り替えることが行われている。
【0005】
すなわち、一つの保護領域に固定すると、危険源にワークを受け渡すために作業者が保護領域に入るたび毎に危険源である機械の動作が光走査型光電スイッチの安全出力に基づいて停止されてしまい、このことによって作業効率が低下してしまう。この問題に対処するために複数の保護領域を予め設定しておき、上記の例であれば、作業者がワークの受け渡しを行うときには、作業者の侵入を許容する保護領域に切替え、作業者が離れている最中には別の保護領域に切り替えることができる。
【0006】
保護領域の設定は、ユーザの手で行われるものであるが、保護領域を規定する作業は容易ではなく、また、ユーザが保護領域を設定した後に意図通りの保護領域が間違いなく設定されているか否かを実際に確認する必要があるため、ユーザが複数の保護領域を設定する、その設定作業及びこれに付随する確認作業が繁雑であり、また、正確性が要求される。
【0007】
本発明の目的は、複数の保護領域を設定してこれを切り替えるのと実質的に同様の作業効率を確保しつつ、ユーザにとって簡便な設定作業で足りる光走査型光電スイッチ及び領域設定方法並びに領域設定プログラムを提供することにある。
【課題を解決するための手段】
【0008】
上記の技術的課題は、一つの観点によれば、本発明の基本概念を示す図56を参照して、
光を二次元的に走査して物体を検出すると共に該物体までの距離を計測して該物体の二次元位置を検知し、該物体の二次元位置が、予め設定された保護領域内であるときに物体の存在有りの判定を行って、安全信号の出力を制御する出力制御部から安全信号を出力する光走査型光電スイッチにおいて、
前記保護領域と、該保護領域の領域内に設定される付加機能エリアと、該付加機能エリアに設定される付加機能を実行する成立条件とを記憶した記憶手段と、
外部入力を受け付ける受付端子と、
該受付端子で受け取った前記外部入力に基づいて、該外部入力が前記記憶手段に記憶されている成立条件を満すときに前記付加機能を実行する付加機能実行信号を前記出力制御部に供給する付加機能実行信号生成部と、を有し、
前記外部入力に基づいて、前記保護領域に含まれる前記付加機能エリアの付加機能によって前記安全信号の出力が制御されることを特徴とする光走査型光電スイッチを提供することにより達成される。ここに、付加機能の典型例が、付加機能エリア内に物体を検知しても、この物体の検知を一時的に無効化するミューティング機能である。
【0009】
上記の技術的課題は、本発明の他の観点によれば、
上記の本発明の光走査型光電スイッチと、該光走査型光電スイッチの設定を行うプログラムを実行可能なパーソナルコンピュータとからなる光電スイッチ設定装置を使って前記追加機能エリアを設定する領域設定方法であって、
前記パーソナルコンピュータのディスプレイに表示された設定画面に、前記光走査型光電スイッチのシンボルと共に表示される保護領域を第1の色で表示する保護領域表示工程と、
前記設定画面に表示の保護領域に重畳して、ユーザが指定したエリアを表示する指定エリアを前記第1の色とは異なる第2の色で重畳表示する指定エリア表示工程と、
ユーザが指定した前記指定エリアをユーザが確認して確認の入力をすることで、前記保護領域と前記ユーザが指定したエリアとがオーバーラップするエリアを付加機能エリアとして設定する付加機能エリア設定工程と、
該付加機能エリア設定工程の次に、前記保護領域からはみ出した前記指定エリアを削除して、前記保護領域と前記ユーザが指定したエリアとがオーバーラップするエリアを付加機能エリアとして前記保護領域に重畳表示すると共に、該付加機能エリアを前記保護エリアの前記第1の色とは異なる色で表示する付加機能エリア表示工程とを有する光走査型光電スイッチの領域設定方法を提供することにより達成される。
【0010】
上記の技術的課題は、本発明の別の観点によれば、
光を二次元的に走査して物体を検出すると共に該物体までの距離を計測して該物体の二次元位置を検知し、該物体の二次元位置が、予め設定された保護領域内であるときに物体の存在有りの判定を行って安全信号の出力を制御する出力制御部から安全信号を出力する光走査型光電スイッチにおいて、
前記保護領域と、該保護領域の領域内に設定され且つ物体を検知してもこの物体の検知を一時的に無効化するミューティング機能が設定されたミューティングエリアと、該ミューティングエリアのミューティング機能を実行する成立条件とを記憶した記憶手段と、
外部入力を受け付ける受付端子と、
該受付端子で受け取った前記外部入力に基づいて、該外部入力が前記記憶手段に記憶されている成立条件を満すときに前記ミューティング機能を実行するミューティング機能実行信号を前記出力制御部に供給するミューティング機能実行信号生成部と、を有し、
前記外部入力に基づいて、前記保護領域に含まれる前記ミューティングエリアのミューティング機能によって前記安全信号の出力が制御されることを特徴とする光走査型光電スイッチに接続された外部パーソナルコンピュータを使って前記ミューティングエリアを設定するためのプログラムであって、
前記パーソナルコンピュータのディスプレイに設定画面を表示して、該設定画面に前記光走査型光電スイッチのシンボルと共に表示される保護領域を第1の色で表示する保護領域表示手順と、
前記設定画面に表示の保護領域に重畳して、ユーザが指定したエリアを表示する指定エリアを前記第1の色とは異なる第2の色で重畳表示する指定エリア表示手順と、
ユーザが指定した前記指定エリアをユーザが確認して確認の入力をすることで、前記保護領域と前記ユーザが指定したエリアとがオーバーラップするエリアを付加機能エリアとして設定する付加機能エリア設定手順と、
該付加機能エリア設定工程の次に、前記保護領域からはみ出した前記指定エリアを削除して、前記保護領域と前記ユーザが指定したエリアとがオーバーラップするエリアを付加機能エリアとして前記保護領域に重畳表示すると共に、該付加機能エリアを前記保護エリアの前記第1の色とは異なる色で表示する付加機能エリア表示手順を前記外部コンピュータに実行させるためのプログラムを提供することにより達成される。
【0011】
本発明の他の目的及びその作用効果は、本発明の実施例の詳しい説明から明らかになろう。
【図面の簡単な説明】
【0012】
【図1】光走査型光電スイッチの基本的な用語を説明するための図である。
【図2】本発明に関連した光走査型光電スイッチの適用例を説明するための図である。
【図3】本発明に関連した光走査型光電スイッチの光学系の構成を説明するための図である。
【図4】図4の(a)は図3の光走査型光電スイッチの全体構成を示し、図4の(b)は保護領域と警告領域を説明するための図である。
【図5】本発明に関連した光走査型光電スイッチの外観図である。
【図6】図6の(a)は本発明に関連した光走査型光電スイッチの正面図であり、図6の(b)はユーザインターフェース部を抽出してユーザ側から見た図である。
【図7】本発明に関連した光走査型光電スイッチの内部構造を説明するための縦断面図である。
【図8】図5に関連した図であり、光走査型光電スイッチから投光窓を形成する光透過カバーを取り外した図である。
【図9】本発明に関連した光走査型光電スイッチの内部構造を構成する装置本体の斜視図であり、走査ミラーが測定領域とは反対側に向いている状態を示す図である。
【図10】図9の装置本体の断面図である。
【図11】光走査型光電スイッチに内蔵した基準対象物として白と黒の2種類の反射率の異なる反射面の平面図である。
【図12】図11の基準対象物の2つの反射面にレーザパルス光を投光した状態を示す図である。
【図13】保護領域や警告領域を設定するためのプログラムをインストールしたパーソナルコンピュータを接続した光走査型光電スイッチを示す図である。
【図14】保護領域を設定する機能ブロック図である。
【図15】パーソナルコンピュータのディスプレイに表示される領域設定画面である。
【図16】保護領域を設定する工程を説明するための図である。
【図17】保護領域を設定する他の工程を説明するための図である。
【図18】ミューティングエリアを設定するのに際して、先ず、保護領域を設定するときの領域設定画面である。
【図19】図18で設定した保護領域にミューティングエリアを設定する中間工程における領域設定画面である。
【図20】ミューティングエリアが設定された保護領域を説明するための図である。
【図21】ミューティングエリアに各種の機能及びミューティング時間などを設定するためのミューティング設定画面である。
【図22】光走査型光電スイッチにミューティングエリアを設定した搬送システムの全体構成図である。
【図23】ミューティング機能に関連した光走査型光電スイッチの機能ブロック図である。
【図24】複数のミュートセンサとワークとの関係を説明するための図である。
【図25】図24に続いて、複数のミュートセンサとワークとの関係を説明するための図である。
【図26】ミューティングに関係したタイムチャートである。
【図27】ミューティングエリアを複数設定し、ワークの種類に応じてミューティングエリアの切り替え制御を行うゲート構成を説明するための図である。
【図28】図27に関連して、比較的高さの低いワークがゲートを通過するときに比較的高さの低いミューティングエリアが設定されることを説明するための図である。
【図29】図27に関連して、比較的高さの高いワークがゲートを通過するときに比較的高さの高いミューティングエリアに切替えられることを説明するための図である。
【図30】ゲートにワークの高さを検出するために三段階に設置高さの異なるセンサを用意し、このセンサによって検出したワークの高さに基づいてミューティングエリアを切り替えるゲート構成を説明するための図である。
【図31】図30に関連して、図31の(a)は高さの低いワークを検出したときに、この低いワークに対応した高さの低いミューティングエリアが設定されることを説明する図であり、図31の(b)は中程度の高さのワークを検出したときに、この中程度の高さのワークに対応した中程度の高さのミューティングエリアが設定されることを説明する図である。
【図32】図30、図31に関連して、図32の(c)は高さの高いワークを検出したときに、この高さの高いワークに対応した高さの高いミューティングエリアが設定されることを説明する図であり、図32の(d)は相対的に一番高さの高いワークを検出したときに、この非常に高いワークに対応した非常に高いミューティングエリアが設定されることを説明する図である。
【図33】走行台車に光走査型光電スイッチを設置して、走行台車が走行している通路に応じて保護領域を切り替える例を説明するための図である。
【図34】複数系統の出力を備えた光走査型光電スイッチの適用例を説明するための図である。
【図35】図34に関連して2系統の出力を備えた光走査型光電スイッチの動作を説明するためのブロック図である。
【図36】複数の系統の出力に安全信号に検査信号を重畳するときに、検査信号に位相を設ける例を説明するためのタイムチャートである。
【図37】隣接した2つの光走査型光電スイッチ間で干渉の問題が発生し易いことを説明するための図である。
【図38】2つの光走査型光電スイッチ間で干渉が発生したときの投光パルスのタイムチャートである。
【図39】光走査型光電スイッチの走査ミラーが回転することにより放射状にレーザ光を投光する様子を説明するための図である。
【図40】投光パルスの投光周期を説明するための図である。
【図41】走査ミラーの回転周期つまりスキャン周期を説明するための図である。
【図42】隣接する光走査型光電スイッチにおいて投光周期を異ならせることで干渉を防止する制御例を説明するための図である。
【図43】本発明に関連した光走査型光電スイッチの基本構成をブロック図的に示す図である。
【図44】複数の光走査型光電スイッチを相互に接続して投光タイミングに位相を設けることで干渉を防止する制御例を説明するための図である。
【図45】隣接する光走査型光電スイッチにおいて干渉を検知したときに投光タイミングに位相を設ける制御例を説明するための図である。
【図46】本発明が適用された光走査型光電スイッチにユーザインターフェース部に設置した液晶表示部の表示モードの変化を説明するための図である。
【図47】図46のモニタモードでの表示の変遷を説明するための図である。
【図48】図46の設定モードでの表示の変遷を説明するための図である。
【図49】光走査型光電スイッチに接続したディスプレイ付き端末であるパーソナルコンピュータを使って外乱光の発生方位をパーソナルコンピュータのディスプレイに表示できることを説明するための図である。
【図50】外乱光によるエラーを光走査型光電スイッチの液晶表示部に表示されることを説明するための図である。
【図51】外乱検知の具体的な手法を説明するためのフローチャートである。
【図52】外乱の方位を指し示すインジケータを光走査型光電スイッチに設置した例を示す図である。
【図53】光走査型光電スイッチに内蔵した基準対象物を使って検出感度を自律的に維持し、また、基準対象物などの汚れを光走査型光電スイッチの故障とみなすときに必要とされる基準受光強度を工場出荷の際にメモリに記憶させる手順を説明するためのフローチャートである。
【図54】図53の手順でメモリに記憶した基準受光強度を使って光走査型光電スイッチの検出感度を自律的に維持するための処理手順を説明するためのフローチャートである。
【図55】光走査型光電スイッチに内蔵した基準対象物の汚れなどが発生したときに、これを図53の手順でメモリに記憶した基準受光強度を使って検出して光走査型光電スイッチを安全状態に移行させる処理手順を説明するためのフローチャートである。
【図56】本発明の基本概念図である。
【発明を実施するための形態】
【実施例】
【0013】
図1を参照して、一般論として、光走査型光電スイッチの基本的な用語である「測定領域」「最大保護領域」「警告領域」「保護領域」を説明する。「最大保護領域」とは、光走査型光電スイッチが安全規格に規定された低反射率物体から高反射率物体まで様々な反射率の物体を検出可能な領域をいう。「測定領域」とは、光走査型光電スイッチが標準的な反射率を備えた物体を検出可能な領域をいい、この「測定領域」は「最大保護領域」を完全に包含する。
【0014】
光走査型光電スイッチは、既知のようにレーザ光などの光により最大保護領域を二次元的に走査し、最大保護領域から反射された走査光をモニタすることでエリア内の安全を監視するのに用いられる。
【0015】
上記の「測定領域」「最大保護領域」は各光走査型光電スイッチの固有のものであり、ユーザが設定できるエリアではない。これに対して、「保護領域」「警告領域」はユーザが設定可能な領域であり、「保護領域」は「最大保護領域」内にだけ設定可能である。これに対して「警告領域」は「測定領域」内に設定可能である。
【0016】
図2を参照して、本発明が適用された光走査型光電スイッチ1の最大保護領域は約4メートルの半径距離の領域であり、上述したように、この約4メートルの半径距離の最大保護領域内に限定してユーザが「保護領域」を設定することができる。
【0017】
「保護領域」は、機械(例えばロボット)の起動や動作を停止するための安全出力と対応付けられており、例えば作業者がこの「保護領域」に侵入したときには光走査型光電スイッチ1は動作不許可を示す安全出力つまりOFF状態の出力を機械に供給する。
【0018】
「警告領域」は、安全出力とは対応付けられておらず機械に接近しているとして警告を発する非安全出力(通常の出力)と対応付けられている。また、この光走査型光電スイッチ1のスキャン角は最大270°であり、光走査型光電スイッチ1の後方エリアまで保護領域及び警告領域を設定することができる。
【0019】
図2の例では、ロボット2の作業領域及び搬送装置が設置された領域が防護柵3で仕切られており、この防護柵3で規定される領域においてロボット2の作業エリアに隣接するエリアが保護領域Aとして設定され、この保護領域Aの監視のために光走査型光電スイッチ1が設置されている。保護領域Aに例えば作業者Mが侵入すると直ちに光走査型光電スイッチ1によって検知される。なお、図2に図示の保護領域Aは、比較的検出能力が低い保護領域A(低)と、検出能力が比較的高い保護領域A(高)とが用意されている。この検出能力の異なる2種類の保護領域A(低)、A(高)に関しては後に説明する複数の出力系統を光走査型光電スイッチ1が備えている場合に効果的である。
【0020】
図3は、光走査型光電スイッチ1の光学系の基本構造を説明するための図である。この図3を参照して光走査型光電スイッチ1の光学系の要素を説明する。
【0021】
光路:
光走査型光電スイッチ1は、赤外線領域に含まれる波長のレーザ光によって検出が実行される。光走査型光電スイッチ1は、レーザ光を水平面上で所定のピッチで走査し、その反射光を受け取ることで侵入者や物体Mの検出を行う。
【0022】
光照射手段:
図3において参照符号LDは投光素子を示す。投光素子LDが出射したレーザ光L1は、投光レンズ10を通り、投光用の第1、第2ミラー(反射鏡)11、12により偏向されて、所定の垂直の第1軸線Zに沿った方向において下方に向けて進む。したがって、投光レンズ10、投光用の第1および第2ミラー11、12は垂直の第1軸線Zに沿ってレーザ光L1を照射する光照射手段を構成している。投光素子LDは、一定の周期で断続的にパルス状のレーザ光L1を出射し、このレーザ光は0.36°毎に投光素子LDから出射される。なお、当業者であれば以下の説明から理解できる通り、光走査型光電スイッチ1の検出原理は光のコヒーレント性などレーザ光特有の性質を利用するものではない。したがって、光走査型光電スイッチ1の投光源としてのレーザ光源は一例に過ぎず、このレーザ光源に限定されることなく種々の光源を採用してもよいことは言うまでもない。ところで、レーザダイオードは高輝度の点光源であり、パルス発光の際に高速応答性に優れている。したがって、光走査型光電スイッチ1の光源として、レーザダイオードを好適に採用することができる。
【0023】
光走査手段14;
上記の投光用第2ミラー12によって垂直の第1軸線Zに沿った方向に偏向されたレーザ光L1は、第2ミラー12の下方に位置する光走査手段14に向って進む。光走査手段14は、垂直第1軸線Zに対して略45°傾斜した状態で配設された走査ミラーで構成されている。この走査ミラー14は、垂直の第1軸線Zを中心に回転駆動される。光走査手段(走査ミラー)14は、図3では図示を省略したモータ24(図7)によって回転駆動される。垂直の第1軸線Zを中心とする走査ミラー14の回転動作によって、図4(b)の破線で示すように、レーザ光L1は垂直の第1軸線Zに直交する水平面上を走査する。図4(b)に示す参照符号Aは、例示的に設定した「保護領域」であり、Bは「最大保護領域」である。
【0024】
なお、走査ミラー14は図示の例では、投光及び受光で兼用する共通の軸回転ミラーで構成されているが、変形例として、投光と受光とを個別の走査ミラーで構成し、投光用走査ミラーと受光用走査ミラーとを同軸に配設すると共に投光用走査ミラーと受光用走査ミラーとが同じ方位に向くよう配設し、そして、これらの走査ミラーを同期して回転させる構成を採用してもよい。
【0025】
受光反射体21、光電変換素子22;
警告領域や保護領域Aに物体Mが存在すると、この物体Mで反射した反射光L2が光走査型光電スイッチ1に入力され、この反射光L2は、走査ミラー14で反射された後に受光レンズ20によって集光される(図3)。受光レンズ20は、垂直の第1軸線Zと一致する光軸を有しており、受光レンズ20によって集光された反射光L2は受光反射体21によって偏向されて、受光素子としての光電変換素子22に集光される。
【0026】
図3を引き続き参照して、受光反射体21は、垂直の第1軸線Zに対して略45°傾斜して配設されており、この受光反射体21によって、受光レンズ20により集光した反射光L2の光軸は、垂直の第1軸線Zに対して略直交する横方向の第2軸線Yに沿った方向に偏向し、この偏向後の反射光L2が光電変換素子22によって受光される。光電変換素子22は、反射光L2を受光すると光電変換して受光信号を生成する。
【0027】
図4の(a)を参照して、光走査型光電スイッチ1は、CPUやメモリを含むマイクロコンピュータやFPGA等で構成される制御手段30を有している。図4の(a)は、光走査型光電スイッチ1の全体系統をブロック図的に示してある。投光素子LDは制御手段30によって制御され、また、光電変換素子22の信号は制御手段30に入力される。
【0028】
光走査型光電スイッチ1の外観構成:
図5を参照して、光走査型光電スイッチ1は、その上端部の前面に傾斜して位置するユーザインターフェース部32を有している。ユーザインターフェース部32を傾斜して配置することにより、ユーザインターフェース部32の面積を拡大することができると共に、ユーザにとってもアクセスが容易となる。
【0029】
傾斜したインターフェース部32には、その中央部分に、矩形の液晶表示部34が設けられ、この液晶表示部34の一側及び下方に、複数のプッシュ式の操作ボタン36が配設されている。また、液晶表示部34の他側には、横二列で上下に離間して複数のLEDインジケータ38が配設され、この複数のLEDインジケータ38によって光走査型光電スイッチ1の動作状態が表示される。
【0030】
図6(b)はユーザインターフェース部32を抽出して、これを平面的に図示してある。ユーザインターフェース部32に向かって液晶表示部34の右側には上下の印を付したボタン36a、36bが配設され、液晶表示部34の下方には、右矢印を付した中央ボタン36cを挟んで、その左側にESCの文字を付したボタン36d、右側にEnterの文字を付したボタン36eが配設されている。
【0031】
ユーザインターフェース部36を斜めに傾斜させ面積を拡大することで比較的大きい液晶表示部34を配設することができる。また、これに加えて複数のプッシュ式操作ボタン36をユーザインターフェース部36に配設することができ、この操作ボタン36を光走査型光電スイッチ1に設置することで、ユーザが必要とする設定をディスプレイ付き端末である外部パーソナルコンピュータ無しに光走査型光電スイッチ1に対して直接的に設定作業を行うことのできる設計が可能になる。ここに、液晶表示部34は、12文字×4行の表示が可能であり、このように比較的沢山の情報を表示することのできる液晶表示部34を使ってユーザに必要な情報を提供し、ユーザは、この液晶表示部34を見ながら操作ボタン36を操作するだけで、外部パーソナルコンピュータ無しに、必要とする設定作業が可能になる。
【0032】
特に、安全に直接的に関係する機能を設定する場合、例えば「保護領域」を設定するときに、設定が正しく行われているかをユーザに確認(ベリファイ)させる必要があり、ユーザによる確認作業が完了することで始めて安全に直接的に関係する機能の、つまりこの場合「保護領域」の設定が反映される。ユーザによる確認作業は、以下の手順で実行される。光走査型光電スイッチ1は、設定入力に引き続いて、設定が未反映のユーザが入力した内容を文字、数字及び記号などを用いて液晶表示部34に表示するように設計されている。液晶表示部34に表示された内容が設定すべき内容と一致するか否かをユーザに確認させるのは上述の通りであるが、ユーザが一致すると判断したときには、ユーザに対して操作ボタン36の操作を伴うOK指示を求めるように設計される。そして、光走査型光電スイッチ1は、OK指示を受け付けることで、液晶表示部34に表示の内容確認を完了し、未確認の内容が有れば、その内容を液晶表示部34に表示してユーザからのOK指示を待つ。光走査型光電スイッチ1は、全ての内容についてOK指示を受け付けることで確認作業状態を終了し、確認作業が終わった内容を設定に反映する。一方、液晶表示部34に表示の内容と設定すべき内容とが一致しないとユーザが判断したときには、ユーザは操作ボタン36によって取消指示を行うことができる。光走査型光電スイッチ1は、取消指示を受け付けることで、全ての入力内容を設定に反映することなく確認作業を終了し、次いで設定入力を受け付ける状態に遷移する。ただし、保護領域A等の位置や領域に関する入力内容の確認は、表示された内容の一致を確認するだけは不十分であり、実際に光走査型光電スイッチ1の光学系を含む距離計測機能を有効化した上で、ユーザが設定すべき位置や領域に相当する場所に試験体をかざして保護領域A等の位置や領域に関する入力内容の確認作業を行うことになる。このことから、液晶表示部34には、安全に直接的に関係する機能の設定を受け付ける画面が表示されるだけでなく、設定された内容をユーザに確認させる画面を表示し、この確認画面によって上述したユーザによるベリファイを実行するのが好ましい。
【0033】
図6(a)は、光走査型光電スイッチ1の正面図であり、レーザ光が走査する水平面つまり走査面39を横線で図示してある。光走査型光電スイッチ1の内部構造を図示した図7から分かるように、光走査手段(走査ミラー)14及びこれを駆動するモータ24などの機構部品をユニット化した装置本体60(図9)を有し、装置本体60の下部にモータ24が配設されている。モータ24の回転軸には、たとえば、光電式のロータリエンコーダ25が設けられている。ロータリエンコーダ25は、円周方向に等間隔に配設された複数のスリットを有し、このスリットを通過した光に依存した出力に基づいて光走査手段14の回転角度を算出することで、投受光L1、L2の偏向方位が求められる。
【0034】
図4(a)に戻って、制御手段30には、液晶表示器34およびLEDインジケータ38及び操作ボタン36が接続されている。また、制御手段30には第1コネクタ40が接続され、この第1コネクタ40に対して、外部機器から延びる外部ケーブル42のコネクタ44を連結することができる。
【0035】
制御手段30は、距離算出手段51、方位算出手段52、位置認識手段53、判別手段54、汚れ検知手段55、信号生成手段56、表示制御手段57、故障検知手段58などを備えている。
【0036】
距離算出手段51:
距離算出手段51は、各偏向方位について、光電変換素子22からの受光信号に基づいて物体Mまでの距離を算出する。すなわち、投光素子LDからの走査光L1の投光タイミングと、物体Mによって反射された反射光L2を受光した光電変換素子22の受光タイミングとの差に、既知の光速を乗算することで物体Mまでの距離を算出することができる。投光タイミングは所定周期であり、この投光タイミングとモータ24の角速度との積によって光軸の空間密度つまり光軸間角度が規定される。なお、投光タイミングは、「時間」で規定してもよいし、「方位」や「空間密度(光軸間角度)によって規定してもよい。投受光タイミングに基づく距離の算出は、所定の微小時間ごとに繰り返し行うようにしてもよく、又は、例えば投光タイミングに同期して投受光毎に距離の算出を実行するようにしてもよい。
【0037】
方位算出手段52:
方位算出手段52は、前記投光および受光において、光走査手段14により測定領域に向けて偏向された走査光L1の照射方位(偏向方位)と物体Mからの反射光L2が入光する方位とを算出する。ただし、モータ24の角速度に対して「測定領域」内の物体Mまでの光の往復時間が相対的に充分に小さいため、照射方位と入光する方位とは同一とみなせることから、照射方位と入光方位のいずれか一方を算出するようにしてもよい。この投受光L1、L2の偏向方位つまり走査面での方位(走査方位)は、前述したロータリエンコーダ25からの出力に基づいて光走査手段14の回転角度を算出することで求められる。なお、投光タイミングを方位や空間密度(光軸間角度)によって規定する場合は、照射方位を偏向方位(走査方位)とするのが好適である。また、この方位は光軸番号と等価である。
【0038】
位置認識手段53:
位置認識手段53は物体Mの位置の認識を行う。すなわち、位置認識手段53は、投受光タイミング毎に、方位算出手段52により算出された偏向方位(走査方位)と、この偏向方位において距離算出手段51が算出した物体Mまでの距離とに基づいて物体Mの位置を算出することにより、この物体Mの位置を認識する。
【0039】
判別手段54:
判別手段54は、位置認識手段53により算出された物体Mの位置に基づいて、予め設定された保護領域A内に物体Mが存在するか否かを判別する。なお、判別手段54は、1回(1周期)でも保護領域内に物体Mが存在すると判別すると、「存在有り」を示す情報を供給するように構成してもよいし、所定の複数回に亘って連続して、つまり複数の周期に亘って保護領域内に物体Mが存在すると判別したときに初めて「存在有り」を示す情報を供給するようにしてもよい。
【0040】
光走査型光電スイッチ1の光学系は、光走査型光電スイッチ1の下半分の前面及び両側面を包囲する、横断面U字状の光透過カバー62によって密閉されており、この光透過カバー62は投光窓を形成するものである。図8は光透過カバー62を取り外した状態を図示してある。光透過カバー62はシール部材64を介して取り付けられ、複数のボルト66(図5)を取り外すことで光透過カバー62を光走査型光電スイッチ1から取り外すことができる。投光窓の光透過カバー62は光学フィルタであり、光走査型光電スイッチ1が出射するレーザ光の波長以外の波長成分を除去する。光透過カバー62は、その材料は任意であるが、ここでは弾性変形可能な合成樹脂材料で作られている。
【0041】
装置本体60の断面図である図7から最も良く分かるように、光走査手段(走査ミラー)14は、装置本体60の底部において、背面部から離れた前端部に配設されており、これにより走査ミラー14の回転軸線である垂直の第1軸線Zが比較的前方にオフセットして位置決めされている。これに対して、光透過カバー62は装置本体60の前方及び両側を包囲し、この光透過カバー62の左右両端部は光走査型光電スイッチ1の背面まで延びている。このような構成を採用することにより、光走査型光電スイッチ1の背面と干渉する部位を除く左右及び前方の領域を走査領域(測定領域)として設計することが可能になる。このことは、走査ミラー14の変形例として前述したように、互いに同期回転する投光用走査ミラーと受光用走査ミラーを同軸に且つ同じ方位に向くように配設した場合でも同様である。
【0042】
ちなみに、前述したように、この光走査型光電スイッチ1の走査範囲(測定領域)は180°よりも後方に拡大した270°である。このように走査範囲を光走査型光電スイッチ1の後方まで拡大できたのは、基本的には、(1)走査面39(図6(a)において、この走査面39と干渉する光走査型光電スイッチ1の背面の幅を走査面39における90°の範囲に制限する構成を採用し、更に、(2)走査ミラー14の回転軸線である第1軸線Zを光走査型光電スイッチ1の背面から離間させて、断面U字状の光透過カバー62の互いに並行な両側面を後方に延ばして、光走査型光電スイッチ1の背面を除く側方及び前方領域の全領域を光透過カバー62で包囲した、ことの2つの構成の組み合わせによる。換言すれば、光走査型光電スイッチ1は従来品に比べてスリムであり且つ高さ寸法も小さく、従来品の約半分の体積であり、手のひらに余裕を持って載せることのできる程度の大きさである。
【0043】
光透過カバー62の形状つまり上方に向けて徐々に広がった形状にも注目すべきである(図5、図8)。更に、図4から最も良く分かるように、光透過カバー62の下端部62aは垂直壁で構成され、この垂直下端部62aから上方に向かうに従って徐々に外方に広がるオーバーハングの形状を有し、このオーバーハング形状部分62bの上下方向中間部分に水平の走査面39が設定されている(図6)。
【0044】
図5から最も良く分かるように、光透過カバー62の下端に接する部分が、外方に突出した水平段部70で構成されている点に注目すべきである。光透過カバー62を挟んで第1、第2の光学素子71、72が配設されており(図4)、光透過カバー62よりも外側に位置する第2光学素子72が上記の水平段部70に配設されている。換言すると光透過カバー62よりも内側に第1光学素子71が配設され、この第1光学素子71は下方に向けて(第2光学素子72に向けて)設置されている。すなわち、対の第1、第2の光学素子71、72が互いに対向して位置決めされており、この第1、第2の光学素子71、72の組は光透過カバー62の周囲に適当な間隔を隔てて複数設けられている。
【0045】
第1、第2光学素子71、72:
光走査光電スイッチ1の光透過カバー62は可視光をブロックするフィルタの役割を有している。勿論、走査光L1及び反射光L2は透過することができる素材が選択されている。この光透過カバー62が汚染したり、経時的劣化してくると光透過カバー62の光透過率が低下して光電変換素子22に入射する反射光L2の光量が低下する。この現象は物体Mの位置検出の感度が低下する原因となるため好ましくないのは言うまでもない。
【0046】
光透過カバー62を挟んで互いに対向した第1、第2の光学素子71、72の各組は、光透過カバー62の汚染の状態を常時監視している。第1光学素子71が発した光は、光透過カバー62を介して第2光学素子72に入光し、この第2光学素子72が受光した光の量が制御手段30に供給される。
【0047】
汚れ検知手段55:
汚れ検知手段55は、第2光学素子72が受光した光量によって光透過カバー62が所定の透過率を維持しているのを確認する。投光窓を構成する光透過カバー62の経時劣化や汚染などによって透過率が低下したことは第2光学素子72が受光した光量によって検知することが可能である。ここに、第2光学素子72が受光した光量が所定のしきい値以下となったときには、液晶表示部34やLEDインジケータ38を使って光透過カバー62が交換時期にあることをユーザに通知するのがよい。また、汚れ検知手段55は、光走査型光電スイッチ1が故障しているか否かの検出を行う故障検出手段、つまり、所期の検出等を行うことができる安全な状態か否かを確認する手段を構成し、もし、光走査型光電スイッチ1が故障していると汚れ検知手段55が判断した場合には、液晶表示部34やLEDインジケータ38を使ってユーザに警告すると共に、信号生成手段56を介して動作不許可の信号を外部機器に向けて送信する。
【0048】
なお、投光窓を形成する光透過カバー62の汚染や劣化を検出するのに、光透過カバー62を挟んで第1、第2光学素子71、72を対峙して配置する例を説明したが、例えば第2光学素子72に代えて反射鏡を水平段部70に配置して、第1光学素子71が発した光を反射鏡で反射し、そして反射光を、第1光学素子71に隣接して配置した第2光学素子72で受光するようにしてもよい。この例によれば、光透過カバー62の内側に第1、第2光学素子71、72が互いに接近して配置されることになる。
【0049】
信号生成手段56:
信号生成手段56は判別手段54の判別結果に基づいて安全信号を生成する。たとえば、所定のモードにおいて、光走査型光電スイッチ1の正常な動作が確認でき、かつ、保護領域Aに物体Mが存在しないと判別手段54が判定した場合には、信号生成手段56は安全出力としてON信号(動作許可信号)を生成し、この安全出力は、制御手段30及び第1コネクタ40を介して外部ケーブル42を通じて外部機器に向けて送信され、そして、外部機器の動作が許容される。
【0050】
故障検知手段58は、光走査型光電スイッチ1が正しく動作していることを確認(ベリファイ)するものであり、正常動作が確認できないときには光走査型光電スイッチ1が故障したとみなす。
【0051】
光走査型光電スイッチ1の検出感度維持及び調整機構:
図9、図10は光走査手段つまり走査ミラー14が光走査型光電スイッチ1の背面の方向に向いた状態を示している。勿論、この状態では、光走査型光電スイッチ1の検出は不可能であることは言うまでもない。装置本体60の起立した支柱部分60aには、走査ミラー14と対面することのできる位置に、走査ミラー14の回転方向遅れ側と進み側に、つまり左右に基準対象物としての第1、第2の2つの反射面73、74が配設され、この第1、第2の反射面73、74は、共に約45°傾斜して斜め上方に向いた状態で配設されている。また、この第1、第2の反射面73、74に対向して、この第1、第2の反射面73、74の上方には、斜め下方に約45°傾斜した定置ミラー75が支柱部分60aに配設されている。つまり、装置本体60の起立した支柱部分60aには、走査ミラー14が後向きになったときに対面する位置に、第1、第2の反射面73、74が斜め上方に向いた状態で配設され、そして、この第1、第2の反射面73、74の上方に斜め下方に向いた状態で定置ミラー75が配設されている。
【0052】
基準対象物としての第1、第2の反射面73、74は、反射率が異なる材料で作られ又は反射率の異なる色を有している。具体的な例として、第1の反射面73が黒色の材料又は黒色に着色されており、第2の反射面74が白色の材料又は白色に着色されている。
【0053】
投光素子LDが出射したレーザパルス光L1は、投光レンズ10、投光用の第1、第2ミラー(反射鏡)11、12によって走査ミラー14に当たり、この走査ミラー14によって水平方向に進む光になる。走査ミラー14が前方、側方に向いていれば、このレーザパルス光L1は測定領域に差し向けられることになる。走査ミラー14が一回転する最中に、走査ミラー14が後方に向いたときでもレーザパルス光L1を出射することにより、レーザパルス光L1は、後向きになった走査ミラー14によって先ず黒色の第1反射面73に差し向けられ、次いで白色の第2反射面74に差し向けられることになる。このレーザ光L1は、約45°斜め上方に向いた第1、第2の反射面73、74で反射して垂直方向上方に進み(L3)、この反射パルス光L3は、第1、第2の反射面73、74の上方に配設された定置ミラー75で反射する。この定置ミラー75は約45°斜め下方に向いた姿勢で配設されているため、定置ミラー75で反射した反射パルス光L3は、走査ミラー14に戻り、この走査ミラー14で反射して上方に進んで、受光レンズ20、受光反射体21を経て光電変換素子22に集光される。つまり、第1、第2の反射面73、74の反射パルス光L3は、警告領域又は保護領域Aの物体Mで反射した反射パルス光L2のときと同じ要素14、20、21を経て、受光素子である光電変換素子22に入力される。
【0054】
走査ミラー14の後方に、走査ミラー14の回転方向(走査方向)の遅れ側と進み側に隣接して反射率の異なる第1反射面73(黒色)、第2反射面74(白色)を設け、そして、同じ垂直支柱部分60aに固設した定置ミラー75を設けることで、第1反射面73(黒色)、第2反射面74(白色)の反射光L3は、警告領域又は保護領域Aの物体Mで反射した反射光L2のときと同じ要素14、20、21を経て、受光素子である光電変換素子22で受光される。
【0055】
ところで、基準対象物にレーザパルス光を照射し、その反射パルス光を受光したときの受光強度は次の式で表すことができる。
【0056】
(式1)
受光強度=
{投光強度×投光経路の光学特性×基準対象物の反射率÷(基準対象物までの距離)2×受光経路の光学特性×受光ゲイン}
【0057】
また、レーザ光による走査の場合、検出感度は対象物の反射率や対象物までの距離に依存しないで、次の式で表すことができる。
【0058】
(式2)
検出感度={投光強度×投光経路の光学特性×受光経路の光学特性×受光ゲイン}
【0059】
上記の式1及び式2により、基準対象物の反射率と基準対象物までの距離が一定であれば、次の式3が成立する。
【0060】
(式3)
検出感度={受光強度×一定値}
【0061】
レーザ光を使った光走査型光電スイッチ1の内部に基準対象物を具備することで基準対象物の反射率と基準対象物までの距離を一定にするのは容易であることから、基準対象物に対して投光したときに得られる受光感度を一定に保つことで検出感度を一定に維持することができる。この観点に立脚するときに、例えば光走査型光電スイッチ1を工場出荷するときに、その検出感度が最適な状態となるときの受光強度を計測し、そして、計測した受光強度を光走査型光電スイッチ1の記憶素子に記憶させ、光走査型光電スイッチ1が動作中に、この記憶素子に記憶してある受光強度となるように投光強度及び/又は受光ゲインを調整することで光走査型光電スイッチ1の検出感度を最適な状態に保つことができる。
【0062】
図11は第1、第2の反射面73、74を抽出した図であり、矢印は、走査ミラー14の回転方向つまり走査方向を示す。図12は、レーザパルス光が時系列に第1、第2の反射面73、74に当たっている状態を図示してある。
【0063】
基準対象物の一つである黒の反射面73にレーザパルス光が当たっているときの受光感度が「100」(図12の(I)、他の基準対象物である白の反射面74にレーザパルス光が当たっているときの受光感度が「600」であったとする(図12の(II)。ここに、第1、第2の反射面73、74について、「黒」「白」という表現を用いているが、これは便宜上の表現であると理解されたい。「黒」とは投光源であるレーザ光の波長に対して低反射率である意味であり、「白」とは投光源であるレーザ光の波長に対して高反射率である意味である。また、黒の反射面73として十分に反射率が低い面を採用することで、汚れを構成する物質の反射率は黒の反射面73の反射率と同等又はそれ以上となるため、黒の反射面73は汚れると反射率が高くなる傾向にある。一方、白の反射面74として十分に反射率の高い面を採用することで、汚れると反射率は低くなる傾向にある。
【0064】
白の第2反射面74での受光強度を「600」に維持するように投光強度及び/又は受光ゲインを調整した場合、白の第2反射面74が汚れて反射率が低下したとき、この第2反射面74での受光強度を「600」に維持するように投光強度及び/又は受光ゲインの調整が実行されることになる。この場合、黒の第1反射面73での受光強度は、反射率及び距離が一定のままで受光感度が高くなるため、高くなる。この現象に対処するには、第1、第2の反射面73、74での受光感度を常時モニタし、そして、黒の第1反射面73での受光強度の値に許容範囲(例えば80〜120)を設定し、黒の第1反射面73での受光強度が許容範囲を超えたときには白の第2反射面74に汚れが発生したとみなす。白の第2反射面74に汚れが発生すると、適切な感度調整ができなくなるため、保護領域Aの監視を正しく行うことができなくなることから、光走査型光電スイッチ1は安全出力をOFF状態にすることで危険源の動力を停止させる。また、光走査型光電スイッチ1は、液晶表示部34又はLEDインジケータ38を使ってユーザに安全が確認できない旨(安全出力がOFF状態であること)の表示や安全が確認できない理由(エラー内容)についても表示するように構成されてもよい。さらに、光走査型光電スイッチ1は安全出力以外の非安全の出力信号を使用して、エラーが発生していることを外部機器に出力したり、通信ケーブル80を介して外部パーソナルコンピュータPCへエラーの要因や安全出力がOFF状態にあることを送信するように構成されてもよい。
【0065】
同様に、黒の第1反射面73が汚れることで反射率が高くなったとき、黒の第1反射面73の反射光は強くなり、したがって、黒の第1反射面73での受光強度が増加する現象が現れる。このときも、黒の第1反射面73での受光強度が許容範囲を超えたときには基準対象物の一つとしての黒の第1の反射面73に汚れが発生したとみなして、液晶表示部34又はLEDインジケータ38を使ってユーザに警告することができる。
【0066】
基準対象物としての反射率の異なる第1、第2の反射面73、74を隣接して光走査型光電スイッチ1に内蔵し、光走査型光電スイッチ1の光学系を兼用することで、受光感度を常時モニタして受光感度が一定となるように投光強度及び/又は受光ゲインを調整することができる。したがって、光走査型光電スイッチ1の設計において、経年変化や使用時の周囲温度の変動を見越して、この変動分を許容範囲として大きな余裕代を仕様として規定する必要はなく、また、この余裕代を小さくして当初から投光強度及び/又は受光ゲインを高く設定したなかで所定の検出感度を確立することができ、光走査型光電スイッチ1の小型化が容易になる。加えて、第1、第2の反射面73、74からなる調整手段の汚れについても、これを故障として検出するようにしてあるため、安全性を担保するための検出性能のマージンを小さくすることができ、小型でありながら安全性を担保したうえで長距離の検出を行うことのできる光走査型光電スイッチ1を提供することができる。
【0067】
保護領域Aの設定:
光走査型光電スイッチ1の保護領域Aの設定は、光走査型光電スイッチ1だけで簡易な設定ができるように構成するか否かは兎も角として、図13に示すように、パーソナルコンピュータPCを使って行われる。パーソナルコンピュータPCと光走査型光電スイッチ1とは通信ケーブル80を介して接続される。パーソナルコンピュータPCは、既知のように、ディスプレイ81、入力操作部82を有する。
【0068】
パーソナルコンピュータPCには、予め保護領域Aを設定するためのアプリケーションプログラムがインストールされており、このプログラムを使って、光走査型光電スイッチ1の保護領域Aの編集を行うことができる。
【0069】
保護領域編集システムとしてのパーソナルコンピュータPCの構成をブロック図で表したのが図14である。パーソナルコンピュータPCは、アプリケーションプログラムによって、追加及び削除エリア指定部84、不整合エリア抽出部86、設定領域更新部87、設定領域記憶部88、設定領域転送部89及びダイアログ表示部90の機能を備えている。
【0070】
設定領域記憶部88は、光走査型光電スイッチ1に保護領域Aを指定するための設定領域情報を記憶するメモリで構成される。追加及び削除エリア指定部84は、入力操作部82からの入力信号に基づいて、追加エリア、削除エリア及び線分を指定する動作を行う。
【0071】
光走査型光電スイッチ1に既に設定されている保護領域Aに領域を追加する場合には、ユーザが指定した領域が追加エリアに指定される。また、既に設定されている保護領域Aから領域を削除する場合には、ユーザが指定した領域が削除エリアに指定される。
【0072】
不整合エリア抽出部86は、光走査型光電スイッチ1から見て、保護領域A及び追加エリア間に位置する領域を不整合エリアとして自動的に抽出する動作を行っている。すなわち、光走査型光電スイッチ1から見て、保護領域Aと追加エリアとして指定された領域との間に検知エリアとして指定できない領域があれば、当該領域を不整合エリアとして抽出する動作が行われる。
【0073】
不整合エリア抽出部86では、領域追加時に線分が指定された場合、光走査型光電スイッチ1から見て、保護領域A及び線分問に位置する領域が不整合エリアとして抽出される。ここでは、エリア追加時に抽出される不整合エリアを補間エリアと呼ぶことにする。
【0074】
また、不整合エリア抽出部86は、光走査型光電スイッチ1から見て、削除エリアよりも後方に位置する領域であって、保護領域Aの領域を不整合エリアとして自動的に抽出する動作を行っている。すなわち、光走査型光電スイッチ1から見て、削除エリアとして指定された領域よりも後方に保護領域Aとして指定されている領域があれば、当該領域を不整合エリアとして抽出する動作が行われる。
【0075】
不整合エリア抽出部86では、エリア削除時に線分が指定された場合、光走査型光電スイッチ1から見て、線分よりも後方に位置する領域であって、保護領域A内の領域が不整合エリアとして抽出される。ここでは、エリア削除時に抽出される不整合エリアを「影エリア」と呼ぶことにする。
【0076】
領域表示部85は、ディスプレイ81を制御し、設定領域記憶部88に記憶されている設定領域情報に基づいて保護領域A、追加エリア、削除エリア、不整合エリア(補間エリア及び影エリア)を目視で識別可能に表示する動作を行う。すなわち、既に設定されている保護領域Aに領域を追加する場合に、保護領域A及び追加エリアに対して、補間エリアを識別可能に表示し、その際、追加エリア及び補間エリアが付加される前の保護領域Aに対して補間エリアが識別可能にディスプレイ81に表示される。
【0077】
また、既に設定されている保護領域Aから領域を削除する場合に、保護領域A及び削除エリアに対して、影エリアを識別可能に表示し、その際、削除エリア及び影エリアが除外される前の保護領域Aに対して影エリアが識別可能にディスプレイ81に表示される。
【0078】
設定領域更新部87は、入力操作部82からの入力信号に基づいて、設定領域記憶部88に記憶されている保護領域Aを更新する動作を行う。すなわち、既に設定されている保護領域Aに領域を追加する場合には、追加エリア及び補間エリアを付加した領域が新たな保護領域Aとして更新される。
【0079】
エリア追加時に線分が指定された場合には、保護領域Aに補間エリアを付加した領域が新たに保護領域Aとなるように設定領域情報の更新が行われる。
【0080】
また、既に設定されている保護領域Aから領域を削除する場合に、削除エリア及び影エリアを除外した領域が新たな保護領域Aとなるように設定領域情報の更新が行われる。
【0081】
エリア削除時に線分が指定された場合には、保護領域Aから影エリアを除外した領域が新たな保護領域Aとなるように設定領域情報の更新が行われる。
【0082】
ダイアログ表示部90は、ディスプレイ81を制御し、入力操作部82からの入力信号に基づいて確認ダイアログを表示する。すなわち、既に設定されている保護領域Aに領域を追加する場合に、追加エリア及び補間ニリアを保護領域Aに付加するか否かの照会するための照会ダイアログ93が確認ダイアログとしてディスプレイ81に表示される。
【0083】
同様に、既に設定されている保護領域Aから領域を削除する場合に、削除エリア及び影エリアを保護領域Aから除外するか否かを照会するための照会ダイアログ93が確認ダイアログとしてディスプレイ81に表示される。
【0084】
設定領域更新部87では、上記照会ダイアログの表示後の入力操作部82からの入カ信号、すなわち、ユーザによる変更許可の操作入力に基づいて設定領域記憶部88の設定領域情報の更新が行われる。
【0085】
設定領域転送部89は、設定領域記憶部88に記憶されている保護領域Aの情報を光走査型光電スイッチ1に転送する動作を行う。更に、設定領域転送部89は、光走査型光電スイッチ1に保護領域Aの情報を転送した後、転送した保護領域Aを光走査型光電スイッチ1に反映する前に、光走査型光電スイッチ1から保護領域Aの情報の返送を受け付け、ユーザによる保護領域Aの確認作業に利用できるように処理する構成が採用される。転送した保護領域Aの光走査型光電スイッチ1への反映は、ユーザによる保護領域Aの確認作業を経て実行される。
【0086】
図15は、パーソナルコンピュータPCのディスプレイ81に表示エリア設定画面を示す。このエリア設定画面は、保護領域Aを新たに指定し、或いは、既に設定されている保護領域Aを編集する際に用いられる入力画面である。
【0087】
ディスプレイ81に表示されるエリア設定画面では、光走査型光電スイッチ1を示すシンボルSを中心とする直交座標に対して最大の検出エリア(測定領域)が表示されており、横軸に平行なグリッド線G1が500mm間隔で配置されていると共に、縦軸に平行なグリッド線G2が500mm間隔で配置されている。
【0088】
シンボルSよりも後方では、走査レーザ光の出射角度によって検知可能な距離の上限が変化しており、検知可能な角度範囲Hはマイナス45°以上プラス225度以下である。この角度範囲H以外の領域は不感領域であり、保護領域Aとして指定することはできないようになっている。
【0089】
図16は、矩形の保護領域Aに領域92を追加する場合の画面が示す。保護領域Aは、矩形の他に、多角形、光走査型光電スイッチ1を示すシンボルSを中心とした円形又は扇形なども指定することができ、また、マウスポインタを移動させながら描画した線を境界とする閉じた領域を保護領域Aとして指定することができる。
【0090】
ディスプレイ81に表示のエリア設定画面において保護領域Aが指定されたとすると、例えば、ユーザによって決定キーが操作されると、当該保護領域Aが確定し、そして、この保護領域Aを検知対象とするために最小限付加しなければならない領域が補間エリア92として自動的に抽出される。すなわち光走査型光電スイッチ1から見て、保護領域Aとして指定された領域との間における検知対象として指定されていない領域として補間エリア92が抽出される。補間エリア92を保護領域Aに付加しても良いか否かを照会するための確認ダイアログ93が表示され、ユーザによって許可されると、ユーザが設定した保護領域Aに補間エリア92を付加した領域を新たな保護領域Aとして設定され、この新たな保護領域Aに基づいて情報が更新される。
【0091】
図17は、保護領域Aの一部を削除する例を示す。保護領域Aから削除する領域は、任意に指定することができ、ユーザが指定した削除エリアが参照符号94で図示されている。削除する領域は、矩形形状の他に、多角形、光電スイッチ1を中心とする円形又は扇形なども指定することができる。また、画面上のマウスポインタを移動させながら描画した曲線を境界とする閉領域を指定することもできる。
【0092】
保護領域Aに含まれるエリア94を削除エリアとして指定し、例えば、ユーザによって決定キーが操作されると、当該エリア94が削除すべきエリアとして確定する。そして、この削除エリア94を保護領域Aから削除する際に、当該エリア94を非検知領域とすることによって最小限除外しなければならない領域が影エリア95として自動的に抽出される。すなわち、光走査型光電スイッチ1から見て、削除エリアとして指定されたエリア94よりも後方の検知対象領域が影エリア95として抽出される。
【0093】
影エリア95が自動抽出した際には、影エリア95を保護領域Aから除外しても良いか否かを照会するための確認ダイアログ93が表示される。そして、ユーザによって影エリア95を含めて保護領域Aの変更が許可されると、保護領域Aから削除エリア94及び影エリア95を除外したエリアを新たな保護領域Aとして設定され、この新たな保護領域Aのゾーン情報が更新される。図17(C)は、新たな保護領域Aを示してある。
【0094】
ミューティング機能及びミューティングエリアの切替え制御:
光走査型光電スイッチ1は、保護領域Aの一部又は全部のエリアに単数又は複数のミューティングエリアを設定して、所定の条件が成立したときに、予め設定したミューティングエリアでの検知機能を無効化するミューティング機能を有する。保護領域Aの一部のエリアをミューティングエリアに設定する場合を「部分ミュート」と言い、保護領域Aの全部のエリアをミューティングエリアに設定する場合を「全ミュート」と言う。光走査型光電スイッチ1は、他の検知手段やタイミングによって異なるミューティングエリアに切り替えすることができる。以下の説明では、部分ミュートを中心にミューティングエリアの切替え制御を説明するが、複数のミューティングエリアのうち、一つのミューティングエリアを保護領域Aの全体に設定してもよい(「全ミュート」)。
【0095】
ミューティング機能及びミューティングエリアの設定は、上述した保護領域Aの設定と同様に、パーソナルコンピュータPCを使って行うことができ、保護領域Aを設定したときに使用したアプリケーションプログラムにミューティングに関する機能が付加されている。
【0096】
図18は、パーソナルコンピュータPCにインストールされたアプリケーションプログラムを使って、扇状の保護領域Aを設定した場合を例示している。この保護領域Aの設定方法に関しては、図13〜図17を参照した前述の説明の通りであり、指定した保護領域Aを設定するか否かの照会ダイアログ93が確認ダイアログとしてディスプレイ81に表示される。この照会ダイアログ93を使ってユーザが許可することにより指定した保護領域Aが設定される。
【0097】
図19は、保護領域Aを設定するときに使用したアプリケーションプログラムのミューティングに関する設定機能を使ってミューティングエリアを設定する表示画面を示す。参照符号97はユーザがミューティングエリアとして指定した領域を示す。図19から理解できるように、ユーザは保護領域Aのうち光走査型光電スイッチシンボルSから離れたエリアを横断する矩形のエリアを指定していることに注目されたい。この指定エリア97は、少なくとも保護領域Aのうち、光走査型光電スイッチシンボルSから離れた端を、この図19の例では含んでいる。もし、シンボルSから離れた端を含んでいないときには、つまり、保護領域Aにおいて図19における上下中間部分にエリアを指定したときには、後に説明する影エリアが自動抽出されて、この影エリアが表示される。そして、ユーザが指定したエリア97は保護領域Aの上に重畳表示され、また、保護領域Aとユーザが指定したエリア97とは別の色で表示され、ユーザが指定したエリア97と保護領域Aとがオーバーラップした部分は、保護領域Aの第1の色とユーザが指定したエリア97の第2の色とが混ざり合った第3の色で表示される。
【0098】
パーソナルコンピュータPCのディスプレイ81には、指定エリア97で正しいのか質問する照会ダイアログ93が確認ダイアログとして表示され、ユーザが許可することにより指定したエリア97と保護領域Aとがオーバーラップするエリアにミューティングエリア98が設定される(図20)。ミューティングエリアを設定した状態では、先のユーザにより指定されたエリア97(図18)のうち保護領域Aからはみ出した部分が削除されて、保護領域Aと、この保護領域Aの領域内に設定されたミューティングエリア98とが異なる色で表示される。同じ要領で、同じ保護領域Aに複数のミューティングエリア98を設定することができ、各ミューティングエリア98毎に、図21に示すミューティング機能設定画面を使ってミューティング機能を動作させる条件及びミューティング機能を実行する時間などの設定が可能である。
【0099】
なお、ミューティングエリア98の設定手順は、保護領域Aの一部を削除する手順と同様の手順で行われる。つまり、ミューティングすべきエリアが指定されるとミューティングエリア98として最小限追加すべき影エリア(光走査型光電スイッチ1から見て指定されたエリアよりも後方のエリア)を自動抽出し、ミューティングエリア98として追加しても良いか否かを照会するための確認ダイアログが表示され、許可指令に従ってミューティングエリア98の設定及びその更新が実行される。
【0100】
図21の設定画面を使って、例えば複数のミューティングエリア98が保護領域Aに設定されている場合に、各ミューティングエリア98毎にミューティングを開始するタイミングやミューティングを解除するタイミング、ミューティング状態を許容する時間、複数のタイミング信号の時間差などを設定することができる。
【0101】
図22を参照して具体的な一例をワークWの搬送システムを使って説明すると、図22は搬送装置(例えばベルトコンベア)Vの側方から見た様子が示され、搬送装置Vには、ゲート100が設けられ、このゲート100の上端横バーの中央に光走査型光電スイッチ1が配設され、光走査型光電スイッチ1は走査面39(図5)が下方に向けて広がり且つゲート100で囲まれた垂直面と一致するようにして配設されている。すなわち、ゲート100の開口には、その上端中央の光走査型光電スイッチ1によってライトカーテン(検出平面)が形成されている。
【0102】
搬送装置Vには、光電センサなどで構成されたミュートセンサ101〜104が所定条件を満たすようにして配設されている。ここに搬送装置Vの搬送方向に従って上流側から下流側に向けて第1、第2のミュートセンサ101、102がゲート100の手前つまりゲート100の上流側に配設され、第3、第4のミュートセンサ103、104がゲート100の下流側に配設されている。ゲート100の下流は侵入禁止エリアである。第1〜第4のミュートセンサ101〜104は、夫々、図外のケーブルによって光走査型光電スイッチ1に接続される。変形例として第1、第3のミュートセンサ101と103の出力信号がワイヤードオアされ、第2、第4のミュートセンサ102と104の出力信号がワイヤードオアされて光走査型光電スイッチ1へ接続されてもよい。ワイヤードオアされた第1と第3のミュートセンサ101と103の出力信号線は、第1と第3のミュートセンサ101と103の少なくともいずれか一方のミュートセンサがワークWを検出したことを光走査型光電スイッチ1へ伝える。ワイヤードオアされた第2と第4のミュートセンサ102、104の出力信号線は、第2と第4のミュートセンサ102と104の少なくともいずれか一方のミュートセンサがワークWを検出したことを光走査型光電スイッチ1へ伝える。ワークWを検知したことでONするミュートセンサの場合、ミュートセンサの出力信号を短絡することでワイヤードオア信号とすることができる。ワイヤードオアした出力信号線を光走査型光電スイッチ1に接続することで、ミューティング機能に必要な光走査型光電スイッチ1の入力信号線の数を4本から2本に削減することができる。以下に、ワイヤードオアされた場合を例に説明する。
【0103】
第1ミュートセンサ101と、第2ミュートセンサ102との間の間隔はD1である。第2ミュートセンサ102と第4ミュートセンサ104との間の間隔はD2である。第1ミュートセンサ101と、第3ミュートセンサ103との間の間隔はD3である。また、ワークWの移動速度つまり搬送装置Vの搬送速度はV1である。前述した第1〜第4のミュートセンサ101〜104の設置条件は次の通りである。
【0104】
条件(1) Ta<{T=D1/V1}<Tbである。
条件(2) D2<Lwである。
条件(3) D3<Lwである。
ここに、Ta、Tbは予め定められた固定値であり、LwはワークWの前後長さである。
【0105】
上記条件(1)は、ワークWの移動によって第1ミュートセンサ101が検出状態に遷移してから第2ミュートセンサ102が検出状態に遷移するまでの時間差T=D1/V1が所定範囲内にあることを要求している。条件(2)は、第4ミュートセンサ104が検出状態に遷移する前に第2ミュートセンサ102が非検出状態となるのを防止するための条件である。条件(3)は、第3ミュートセンサ103が検出状態に遷移する前に第1ミュートセンサ101が非検出状態となるのを防止するための条件である。
【0106】
条件(1)を満たすように第1、第2ミュートセンサ101、102を配置することにより、ワークWの侵入と、ワークW以外の侵入物の侵入とを第1ミュートセンサ101が検出状態に遷移してから第2ミュートセンサ102が検出状態に遷移するまでの時間差によって判別することができる。
【0107】
条件(2)及び条件(3)を満たすように第1〜第4のミュートセンサ101〜104を配置することにより、搬送手段Vの搬送速度が一定であるという条件の下で、搬送方向の距離が異なることを利用して、ワークWの侵入と、ワークW以外の侵入物の侵入とを判別することができる。
【0108】
図23は、第1〜第4ミュートセンサ101〜104に接続された光走査型光電スイッチ1の機能ブロック図である。図23において、参照符号Trはミュートセンサ101〜104からの外部入力を受け付ける外部入力受付端子を示す。光走査型光電スイッチ1は、ミュート開始判別部106と、ミューティング信号生成部108と、ミュート終了判別部110とにより構成され、保護領域Aに対象物が侵入すると非検出状態から検出状態に遷移して安全出力信号制御部111からOFF信号(動作不許可信号)が出力される。
【0109】
ミュート開始判別部106は、ミューティングエリアを含む保護領域Aへの対象物(物体M)の侵入を判定する第1侵入判定部112と、第1、第3のミュートセンサ101、103からの外部入力を端子Trを経由して受け付けた外部入力信号と、第2、第4のミュートセンサ102、104からの外部入力を端子Trを経由して受け付けた外部入力信号とに基づいて、次の条件が成立したことを判定してミューティング信号生成部108へミューティング開始条件が成立したことを出力する。ミューティング成立条件とは、ミューティングエリアを含む保護領域Aへの侵入を判定する第1侵入判定部112が非検知状態であり、且つ第1、第3のミュートセンサ101、103が非検知状態から検知状態へ遷移した時から、その後、第2、第4のミュートセンサ102、104が非検知状態から検知状態へ遷移するまでの時間差T1が所定の範囲内(Ta<T1<Tbを満足する範囲)であることである。
【0110】
ミューティング信号生成部108は、ミュート開始判定部106による判定結果及びミュート終了判定部110による判定結果に基づいて、安全出力信号制御部111とミュート終了判定部110にミューティング状態信号を生成する動作を行う。
【0111】
ミュート終了判別部110は、ミューティングエリアを除く保護領域Aへの対象物(物体M)の侵入を判定する第2侵入判定部114と、第1、第3のミュートセンサ101、103からの入力信号と、第2、第4のミュートセンサ102、104からの入力信号と、ミューティング状態信号生成部108が出力するミューティング状態信号に基づいて、次の条件によりミューティングを終了させる動作を判定して、ミューティング状態信号生成部108へミューティング終了条件が成立したことを出力する。ミューティング終了条件とは、ミューティングエリアを除く保護領域Aへの侵入を判定する第2侵入判定部114が非検知状態から検知状態へ遷移するか、又は、第1、第3のミュートセンサ101、103の双方が非検知状態へ遷移するか、又は、第2、第4のミュートセンサ102、104の双方が非検知状態へ遷移するか、又は、ミューティング状態信号生成部108が出力するミューティング状態信号が所定時間Tcを越えてミューティング中状態になっていることである。なお、第1、第2の侵入判定部112、114には、対象物(物体M)までの距離を計測する距離計測部116から信号が入力される。
【0112】
ミューティング信号生成部108は、ミュート開始判別部106及びミュート終了判別部110による判別結果に基づいて、安全出力制御部111に対してミューティングを指示するためのミューティング信号を生成する動作を行う。
【0113】
安全出力信号制御部111から出力される安全出力信号は、ゲート100よりも下流の侵入禁止エリア内の加工機を停止させるための制御信号として使用される。この安全出力信号制御部111は、ミューティングエリアを含む保護領域Aへの侵入判定を判定する第1侵入判定部112の判定結果と、ミューティングエリアを除く保護領域Aへの侵入判定を判定する第2侵入判定部114の判定結果と、ミューティング状態信号生成部108が出力するミューティング状態信号とに基づいて、安全出力信号を制御する。より詳しくは、安全出力信号制御部111はミューティング状態信号が非ミューティング中であるときは、保護領域Aへの第1侵入判定部112の判定結果が検知状態であれば安全出力をOFFに制御し、非検知状態であれば安全出力をONに制御する。一方、ミューティング状態信号がミューティング中であるときは、ミューティングエリアを除く保護領域Aへの第2侵入判定部114の判定結果が検知状態であれば安全出力をOFFに制御し、非検知状態であれば安全出力をONに制御する。
【0114】
図24、図25は、図22の搬送装置VによるワークWの搬送に関する動作の一例を示し、(a)から(e)は時系列である。ワークWが第1ミュートセンサ101に干渉しない時点(図24(a)でゲート100に設置した光走査型スイッチ1の保護領域Aに物体Mが侵入すると、光走査型スイッチ1からOFF信号(動作不許可信号)が出力される。
【0115】
図24(b)には、ワークWの先端部が第1ミュートセンサ101と第2ミュートセンサ102の間に位置し、第1ミュートセンサ101の投光部から射出された光をワークWが遮断している場合が示されている。この場合、第1ミュートセンサ101だけが検出状態となる。
【0116】
図24(c)には、ワークWの先端部が第2ミュートセンサ102と干渉し、第1、第2のミュートセンサ101、102は、共に、各投光部から射出された光をワークWが遮断している場合が示されている。この場合、第1、第2のミュートセンサ101、102は、いずれも検出状態となっており、第1、第2のミュートセンサ101、102がこの順序で検出状態に遷移したことによって、保護領域Aのミューティングエリア98においてミューティング機能が実行されている。従って、ワークWがゲート100の光走査型スイッチ1の保護領域Aにおけるミューティングエリア98を通過しても警報信号は出力されない。
【0117】
図25(d)は、ワークWの後端部が光走査型スイッチ1のミューティングエリア98と干渉し且つゲート100の下流の第3ミュートセンサ103にもワークWが干渉している状態にある。この場合、ミューティング状態が継続される。
【0118】
図25(e)は、ワークWの後端部が第4ミュートセンサ104と干渉している状態にある。第3ミュートセンサ103が非検出状態に遷移したことにより、光走査型光電スイッチ1のミューティングエリア98は解除され、光走査型光電スイッチ1の保護領域Aに物体Mが侵入すると、直ちに警報信号が出力される。
【0119】
図26は、図24、図25で説明した動作のタイムチャートである。第1〜第4ミュートセンサ101〜104は、非検出状態でローレベル(オフ状態)であり、検出状態でハイレベル(オン状態)となる信号を出力する。
【0120】
なお、図26のタイムチャートにおいて、光走査型光電スイッチ1に関して「有」は保護領域A内への物体Mの侵入が有るという意味であり、「無」は保護領域Aへの物体Mの侵入が無いという意味である。
【0121】
ワークWの移動に伴って第1〜第4のミュートセンサ101〜104が順次検出状態に遷移する。そして、第1ミュートセンサ101が検出状態に遷移してから第2ミュートセンサ102が検出状態に遷移するまでの時間差T1が所定範囲内にあれば、第2ミュートセンサ102の出力信号の立ち上がりに同期してミューティング信号がハイレベルに切り替えられ、光走査型光電スイッチ1のミューティングエリア98でミューティングが開始される。したがって、このミューティング動作中は、光走査型光電スイッチ1の保護領域Aにおけるミューティングエリア98は、事実上、無効エリアとなる。
【0122】
ミューティング状態となってから経過時間T2が所定時間Tc以上となった場合、および、ミューティングエリアを除く保護領域Aへ対象物(物体M)が侵入したことを光走査型光電スイッチ1が検知した場合には、ミューティングは強制終了される。ユーザが所定時間Tcを設定するときに例えば5分というように上限値を設けてもよい。なお、ミュートセンサ101〜104として光電式のセンサを例に説明したが、ミュートセンサとして、電波音波、超音波、接触式センサであってもよい。
【0123】
また、搬送装置Vを使って高さの異なるワークWが所定の規則に従って搬送されるときには、ワークWがゲート100を通過するタイミングをゲート100の上流側に配置したセンサで検出して、このセンサからのタイミング信号に基づいて、ワークWの高さに合致したミューティングエリア98に切り替えるようにしてもよい。
【0124】
図27〜図29は、高さや幅の異なるワークWに夫々対応した複数のミューティングエリア98を設定した場合の例を説明するための図である。
【0125】
ここにワークWは例示的に自動車だとすると、第1の車種の自動車W1は比較的高さ寸法が高く且つ車幅寸法が小さい。これに対して第2の車種の自動車W2は比較的高さ寸法が低く且つ車幅寸法が相対的に大きい。図27〜図29を参照して、ゲート100を挟んで左側が侵入禁止エリアであり、ゲート100の上端横バーの中央部分に光走査型光電スイッチ1が配設され、この光走査型光電スイッチ1の走査面39はゲート100で囲まれた鉛直面に沿って設定され、これによりゲート100の開口には光走査型光電スイッチ1によってライトカーテンが形成されている。
【0126】
光走査型光電スイッチ1を起点とした矢印は光走査型光電スイッチ1の光軸を例示的に示す。図28は、第2の車種の自動車W2がゲート100を通過するときには、比較的低い台形の第1のミューティングエリア98(1)が設定され、第1の車種の自動車W1がゲート100を通過するときには、比較的高い台形の第2のミューティングエリア98(2)が設定される。ゲート100を通過する自動車Wの車種の順序が予め決まっているのであれば、この順序に従って車種に対応したミューティングエリア98が車種毎に設定される。
【0127】
図30〜図32は、種類の異なるワークWが搬送される場合に、ワークWの高さをセンサ121〜123で検出することで、ワークWの高さ及びこの高さからワークWの種類が規定されるのであれば、各種のワークWの外形輪郭に整合する複数のミューティングエリア98を設定しておくことで、ワークWに対応したミューティングエリア98を設定する例を示す。
【0128】
図30を参照して、ゲート100には、垂直方向下向きに光走査型光電スイッチ1が設置され、この光走査型光電スイッチ1の光軸によってゲート100の開口に反射型のライトカーテンが形成される。その起立した支柱100aに上下に離間して低位置に設置した低位センサ121、中位置に設置した中位センサ122、高位置に設置した高位センサ123が配設され、ゲート100に入る前に、つまり、光走査型光電スイッチ1の光軸により形成されているライトカーテンを通過する前に、この低位、中位、高位のセンサ121〜123のON/OFFの組み合わせによってワークWの高さ及びこれに基づいてワークWの種類を判断して、ワークWの外形輪郭に対応したミューティングエリア98(1)〜98(4)に切り替える制御例を示す。
【0129】
図31(a)は、低位、中位、高位の高さの異なる位置に配設したセンサ121〜123が全て入光した場合を示す。この場合には、低位センサ121にも干渉しない程度のワークWであるとして、比較的高さの低い第1のミューティングエリア98(低)或いは実質的にミューティングエリアが存在しない第1のミューティングエリア98(低)が設定される。
【0130】
図31(b)は、低位、中位、高位の高さの異なる位置に配設したセンサ121〜123のうち低位センサ121がワークWと干渉して遮光した場合を示す。この場合には、低位センサ121の配設高さよりも高いが中位センサ122の配設高さよりも低いワークWであるとして、高さが中程度の第2のミューティングエリア98(中)が設定される。
【0131】
図32(c)は、低位、中位、高位の高さの異なる位置に配設したセンサ121〜123のうち低位センサ121と中位センサ122がワークWと干渉して遮光した場合を示す。この場合には、中位センサ122の配設高さよりも高いが高位センサ123の配設高さよりも低いワークWであるとして、高さが比較的高い第3のミューティングエリア98(高)が設定される。
【0132】
図32(d)は、低位〜高位までセンサ121〜123の全て遮光した場合を示す。この場合には、高位センサ123にも干渉する高さの高いワークWであるとして、高さの最も高い第4のミューティングエリア98(極高)が設定される。この第4のミューティングエリア98(極高)は、保護領域Aの全部の領域であってもよい(「全ミュート」)。
【0133】
このように、光走査型光線スイッチ1の保護領域Aに複数の任意のミューティングエリア98を用意し、適したミューティングエリア98を必要なタイミングで必要な時間設定し、別のミューティングエリア98が適当であれば、この別のミューティングエリア98に切り替えるようにしてもよい。
【0134】
なお、低位、中位、高位のセンサ121〜123の出力は、一旦ON状態(ワークW検知状態=遮光状態)になると、その後、入光しても直ぐにOFF状態に遷移しないで、予め設定された所定の期間入光し続けた後にOFF状態に変化する。この所定の期間は、ワークWが光走査型光電スイッチ1の光軸によって形成されるライトカーテンを完全に通過した後に、低位、中位、高位のセンサ121〜123の出力がOFFするようにユーザによって設定されている。
【0135】
図30乃至図32を参照して説明した例では、保護領域Aの中にミューティングエリア98を設ける共に、ミューティングエリア98として複数のエリアを用意して、適宜ミューティングエリア98を切り替えるようにしてある。この変形例として、例えば図31(a)のミューティングエリア98(低)を除去した領域を保護領域Aとして設定し、この保護領域Aに付加してミューティングエリア98(低)を追加するようにしてもよい。勿論、図31(b)のミューティングエリア98(中)を除去した領域を保護領域Aとして設定し、この保護領域Aに付加してミューティングエリア98(中)を追加するようにしてもよい。図32(c)についても同様であり、ミューティングエリア98(高)を除去した領域を保護領域Aとして設定し、この保護領域Aに付加してミューティングエリア98(高)を追加するようにしてもよい。また、図32(d)についても同様であり、ミューティングエリア98(極高)を除去した領域を保護領域Aとして設定し、この保護領域Aに付加してミューティングエリア98(極高)を追加するようにしてもよい。
【0136】
そして、低位センサ121、中位センサ122、高位の高さの異なる位置に配設したセンサ121〜123が全て入光した場合には、図31(a)に関連して説明した保護領域A(第1ミューティングエリア98(低)付き)を設定し、低位センサ121がワークWと干渉して遮光した場合には、図31(b)に関連して説明した保護領域A(第2ミューティングエリア98(中)付き)に切り替えて設定するようにしてもよい。更に、低位センサ121と中位センサ122がワークWと干渉して遮光した場合したときには、第3ミューティングエリア98(高)付き保護領域Aに切り替えて設定し、低位〜高位までセンサ121〜123の全て遮光したときには、第4ミューティングエリア98(極高)付き保護領域Aに切り替えるようにしてもよい。
【0137】
保護領域の切替え制御:
ミューティングエリア無しに複数の保護領域A(1)〜A(3)を設定しておき、所定の順序で保護領域Aを切り替えるようにしてもよい。図33はその適用例を説明するための図である。工場内など決められた通路を自走する台車130の先端に光走査型光電スイッチ1を設置しておき、通路131の状態に対応して保護領域A(1)〜A(3)を切り替えるようにしてもよい。この場合、3つの保護領域A(1)〜A(3)を設定したとすると、この保護領域A(1)〜A(3)の切り替え順序を台車130からの入力信号(台車130の動作)に連係して予め設定できるようにしてもよい。この図33の例であれば、保護領域Aの切替え順序としてA(1)→A(2)→A(3)→A(1)に設定し、この保護領域Aの切替えは、例えば台車130のタイヤの向きに連動した台車130からの信号に基づいて実行するように設定できるのがよい。
【0138】
また、保護領域Aの切替えに際して台車130の停車を伴う場合には、一時的に、レーザ光の出射を停止する機能つまり投光停止機能を備えているがよい。これにより安全出力がOFFとなるため台車130へは動作不許可信号が供給されることになるが、台車130はレーザ光の出射を停止する前に停車しているため、実質的な不都合はない一方で他の光電スイッチとの不要な光の干渉を防止することができる。
【0139】
複数系統出力:
上述したように安全装置としての光走査型光電スイッチ1はミューティング機能を備えている。光走査型光電スイッチ1は、多光軸光電スイッチと同様に他にも幾つかの機能が提案され、また、今後の開発される可能性を含むが、一例としてインターロック機能を挙げることができる。インターロック機能とは、光走査型光電スイッチ1の安全出力がOFF状態(動作不許可)からON状態(動作許可)に自動的に変化するのを阻止する機能であり、このインターロック機能により、機械が意図せずに起動又は再起動するのを防止するのに役立てられる。
【0140】
また、光走査型光電スイッチ1にはスタートインターロック機能とリ・スタートインターロック機能が用意される。スタートインターロック機能とは、光走査型光電スイッチ1に電源を投入したとき又は停電後に復電したとき、手動でスタートインターロックをリセットするまで安全出力をOFFに保持する機能である。リ・スタートインターロック機能とは、光走査型光電スイッチ1が運転中に安全出力がOFF状態になったときに、手動でリ・スタートインターロック機能を解除するまで安全出力をOFFに保持する機能である。また、これらの機能は動作モードに応じて夫々個別的に有効とするか無効とするかを選択することができる。例えば、マニュアルスタート・マニュアル・リ・スタートモードであれば、両方のインターロック機能が有効となり、マニュアルスタート・オート・リ・スタートモードであれば、スタートインターロック機能が有効となり、リ・スタートインターロック機能が無効となり、オートスタート・オート・リ・スタートモードであれば、両方のインターロック機能が無効となる。
【0141】
光走査型光電スイッチ1は複数系統の出力を有するのがよく、各系統の出力毎に、ミューティング機能、インターロック機能などの各種安全機能や動作モードをユーザが設定できるのがよい。図34はその一例を示す。防護柵3で包囲された危険領域の中に作業ロボット2が設置され、この作業ロボット2は作業台140の上でワークWに対する作業を行う。この作業ロボット2には、これを挟んで左右にワーク搬送台141a、141bを有し、各ワーク搬送台141a(又は141b)はレール142a(又は141b)に案内されて前後に自走する。各ワーク搬送台141a(又は141b)は、作業ロボット2に接近した第1位置と、作業ロボット2から離れて外部とアクセス可能な出入口142に接近した第2位置とを取ることができ、この第2位置で作業者がワークをワーク搬送台141a(又は141b)に載置し、ワークWを受け取ったワーク搬送台141a(又は141b)は第1位置に移動する。作業ロボット2は第1位置のワーク搬送台141a(又は141b)からワークを受け取り、そして、受け取ったワークWを作業台140で処理する。
【0142】
左右の出入口143a、143bの近傍には、夫々、光走査型光電スイッチ1によって保護領域A(a)、A(b)が設定されている。この光走査型光電スイッチ1には、各出入口143a(又は143b)の近傍に配設された第1、第2のミュートセンサ101a(又は101b)、102a(又は102b)からの信号が入力される。
【0143】
光走査型光電スイッチ1は第1、第2の出力系統145、146を有し、第1の出力系統145はワーク搬送台141の駆動源に接続され、第2の出力系統146は作業ロボット2の駆動源に接続されている。光走査型光電スイッチ1の第2出力系統146はミューティング機能を有する(図35)。第1出力系統145は保護領域Aに物体M(例えば作業者)が侵入すると安全出力としてOFF信号がワーク搬送台141に向けて出力される。第2出力系統146はミューティング機能が設定され、ミューティング機能が動作しているときには、保護領域Aに例えば作業者が侵入しても、この侵入検知に関わらず安全出力としてON信号(安全信号)が作業ロボット2に出力される。
【0144】
第1、第2のミュートセンサ101a(又は101b)、102a(又は102b)がワーク搬送台141a(又は141b)を検知すると、光走査型光電スイッチ1のミューティング機能が動作し、第1、第2のミュートセンサ101a(又は101b)、102a(又は102b)がワーク搬送台141a(又は141b)を検知していないときにはミューティング機能の動作は停止する。
【0145】
図34に戻って、図34には、右側のワーク搬送台141aが第2位置に位置しており、このワーク搬送台141aによって右側出入口143aが塞がれた状態になっている。この右側のワーク搬送台141aによって第1、第2のミュートセンサ101a、102aは遮光状態となり、これにより光走査型光電スイッチ1の第2出力系統146はミューティング動作中となる。したがって、右側の保護領域A(a)に作業者が入ってワークを右側のワーク搬送台141aに載置し、また、右側のワーク搬送台141aの上の加工済みのワークWを受け取る作業を行ったとしても、第2出力系統146はミュート中であるため安全信号が作業ロボット2に供給され、作業ロボット2は作業を行うことができる。他方、第1出力系統145は保護領域A(a)に作業者が侵入していることから警報信号が生成されて右側のワーク搬送台141aに警報信号が出力され、これにより右側のワーク搬送台141aは動作停止の状態なる。もっとも、右側のワーク搬送台141aは右側出入口143aの近傍で停止した状態にあることから、光走査側光電スイッチ1から警報信号を受け取ったとしても動作停止状態であることに変わりはないので不都合はなく、一方、不意なワーク搬送台141aの動作を防止できるため、ワーク搬送台141aにより塞がれていた右側出入口143aが開放した防護柵3内への侵入経路ができてしまうのを防止することができる。
【0146】
左側のワーク搬送台141bは作業ロボット2に隣接した位置にあり、左側出入口143bは開放された状態にある。この左側出入口143bの近傍領域は光操作型光電スイッチ1によって保護領域A(b)が設定されていることから、この左側保護領域A(b)に作業者が侵入すると、直ちに、第1、第2の出力系統145、146を通じて左側作業台141b及び作業ロボット2に警報信号が出力され、左側作業台141b及び作業ロボット2が緊急停止される。
【0147】
仮に、光走査型光電スイッチ1が1系統出力しか有していないときには、これを分配してワーク搬送台141及び作業ロボット2に光走査型光電スイッチ1の出力を接続したときには、ワーク搬送台141aの不意な動作を防止するためにはミューティング機能を使用することはできず、保護領域Aに作業者が入り込んで作業する間は、作業ロボット2の動作が保護領域Aにいる作業者に危険を及ぼすものではないにもかかわらず作業ロボット2を停止させることになり、稼働率を下げることになる。光走査型光電スイッチ1が例えば第1、第2の出力系統を有し、光走査型光電スイッチ1にミュート設定されたとしても、作業ロボット2に接続された第2出力系統に対してだけミューティング機能を働かせる設定を行い、ワーク搬送台141に接続された第1出力系統145にはミューティング機能を働かせない設定を行うことで安全性を確保しながら作業ロボット2の稼働率を高めることができる。
【0148】
また、上述した例以外にも、例えばワーク搬送台141a、141b及び作業ロボット2が同期動作しており、ワーク搬送台141a、141bにはワークWを保持するための図示しない電動クランプが設置されている場合、前述した第1出力系統145が電動クランプの動力源に接続され、前述の第2出力系統146が同期動作する作業ロボット2及びワーク搬送台141aに接続されることで、作業ロボット2を動作させたままで電動クランプへのワークWの受け渡し、ワークWの交換、電動クランプからワークWの取り外しを作業者が安全に行うことができる。なお、ワーク搬送台141aへは前述の例とは異なり不意なワーク搬送台141aの動作により、ワーク搬送台141aにより塞がれていた右側出入口143aが開放して防護柵3内への侵入経路ができてしまう虞があるが、この場合、ミュートセンサ101aが非検知状態(入光状態)となるためミューティング状態が解除される。したがって、このミューティング解除の時点で、作業ロボット2及びワーク搬送台141aが緊急停止することで作業者の安全を担保することができる。
【0149】
ここに、緊急停止とは、リ・スタートインターロック機能を有効化していることを意味しており、第2出力系統146に対してリ・スタートインターロック機能が有効化されている。上述の2例において、第2出力系統146がOFF状態になるときは、ワーク搬送台141aにより塞がれていた右側出入口143aが開放して防護柵3内への侵入経路ができている虞があるため、保護領域Aに侵入した作業者により第2出力系統146がOFF状態になった後、作業者が保護領域Aから退避したとしても、光走査型光電スイッチ1は物体Mが保護領域Aに存在しないことは確認できるものの、作業者が防護柵3よりも外側に退避したのか、それとも侵入経路を通じて防護柵3内に侵入してしまったかまでは確認できない。そこで、第2出力系統146に接続された機械(危険源)の再起動は自動的に行わず、人による人為的な安全確認の後に、光走査型光電スイッチ1はリセット手動入力を受け付けることで始めて第2出力系統146をON状態にするか否かを判断する。
【0150】
その一方で、第1出力系統145は作業者が正規の作業を行うときでもOFF状態になり、また、正規な状態において侵入経路はワーク搬送台141aにより塞がれていることから光走査型光電スイッチ1により物体Mが保護領域Aに存在していないことを確認できれば作業者が防護柵3の外側に退避したとみなせるため、第1出力系統145に接続された機械(危険源)の再起動が自動的行われるのが好ましい。つまり、機械(危険源)は通常停止であることから、作業者が保護領域Aから退却した段階で機械(危険源)が自動的に再起動するのが好ましいし、また、作業効率もよい。したがって、第1出力系統145についてはリ・スタートインターロック機能を無効化する、つまりマニュアルスタート・オート・リ・スタートモード或いはオートスタート・オート・リ・スタートモードを設定するのがよい。これに対して、第2出力系統146は緊急停止を伴うことから、作業者が保護領域Aから退却したとしても機械(危険源)が自動的に再起動するは望ましくない。したがって、第2出力系統146はリ・スタートインターロック機能を有効化することで、マニュアルスタート・マニュアル・リ・スタートモードで動作させるのが好ましい。なお、多出力系統のうち、インターロック機能が有効化されたいずれか一つの出力系統がOFF状態になった場合は、緊急停止とみなして、他の出力系統もOFF状態にするように構成してもよい。これにより通常作業時には自動再起動の利便性が得られると共に緊急停止時には全ての出力系統がOFF状態となり、少なくともリセットの手動入力があるまではON状態に変化しないため安全性の確保を担保できる。
【0151】
上述したように、光走査型光電スイッチ1に対してユーザが設定可能な各種の機能やモードに関して、光走査型光電スイッチ1が複数の出力系統を備え且つ各出力系統毎に機能やモードを設定できることで単体の光走査型光電スイッチ1が様々な状態に合理的に対応することができる。
【0152】
また、1つの保護領域A(1)が設定された例を示したが、これに限らず、第1、第2の出力系統145、146の夫々について保護領域をユーザの設定によって別々に割り当てるように構成してもよい。保護領域を別々に割り当てる構成の場合に同一位置で同一形状の保護領域を設定できるように、一方の保護領域の設定を他方の保護領域の設定に反映できるように構成してもよいし、同一位置で同一形状の保護領域を設定するための設定モードを設けるように構成してもよい。更に、第1、第2の出力系統145、146は、夫々、同一の出力状態(ON状態/OFF状態)を示す2つの出力(OSSD1、OSSD2、OSSD3、OSSD4)で構成されているのがよい。各出力は、ON状態のときには、瞬間的に(各出力に接続される外部デバイスが、その出力がOFFになったことを認識しない程度の時間で)OFFとなる自己診断パルスつまり検査信号を重畳し、故障検知手段58は各出力がいつでもOFFできるかを確認される。
【0153】
また、図36に示すように、検査信号である自己診断パルスを重畳するタイミングを各出力で互いに異ならせる、つまり時分割で異なるタイミングで重畳させることで、故障検知手段58が、各出力が短絡していないことを確認できるように構成するがよい。換言すれば、安全出力同士で短絡が発生したとしても故障を検知することができる。
【0154】
自己診断パルスによる安全検出手段は、動作許可を示す安全信号を出力しているときに、この安全信号に重畳した検査信号に基づいて不許可を示す安全信号が出力可能であるか否かを出力デバイス(OSSD)単位で判定し、出力が可能でない(出力不可能)と判定すると動作許可を示す安全信号に代えて動作不許可を示す安全信号を出力することで、少なくとも同一出力系統の他の出力デバイス(OSSD)により動作不許可を示す安全信号が外部機械(危険源)に出力されることから、外部機械は、動作不許可信号を受け付けるか、あるいは、同一出力系統の出力デバイス(OSSD)のON/OFF論理不一致により、安全が確認できないことを認識できる。これにより光走査型光電スイッチ1の安全性が担保される。
【0155】
複数系統出力と検出能力の個別設定:
光走査型光電スイッチ1が複数の出力系統を具備するときに、検出感度を含む検出能力についても各出力系統毎にユーザが設定できるようしてもよい。図2でも例示したように、検出能力を出力系統毎に設定する点について具体的に説明すると、検出能力として通常の能力に設定された第1保護領域A1(通常能力)と、この第1保護領域A1の周囲を含み且つ高い能力に設定された第2保護領域A2とがユーザによって設定されているとする。この場合に、第2保護領域A2に対応する第2安全出力がON状態のときには機械(ロボット)の駆動源(モータ)は通常の速度で動作し、この第2保護領域A2に対応する第2安全出力がOFF状態のときは機械(ロボット)の駆動源(モータ)は低速で動作するように設定し、その一方で、第1保護領域A1に対応する第1安全出力がON状態のときには機械(ロボット)の駆動源(モータ)には電力を供給し、この第1保護領域A1に対応する第1安全出力がOFF状態のときは機械(ロボット)の駆動源(モータ)に電力を供給しないように設定することができる。特に、高速動作する機械や高慣性力(高イナーシャ)の機械の場合、モータへの電力供給を遮断したとしてもモータは急停止することができないため、機械に対して第1保護領域A1よりも遠方まで拡大した第2保護領域A2で、対象物(物体M)を検知したときに機械(モータ)を低速動作に変化させることで、第1保護領域A1で対象物(物体M)を検知した時点で機械(モータ)を急停止することが容易になる。したがって、2系統出力の各々に検出能力をユーザの手で設定可能にすることで、安全性を担保したままで機械の通常の動作のときの速度を高速化することができる。
【0156】
ここに、設定可能な検出能力とは、検出感度の他に、応答時間、最小検出体、受光感度などを含む。応答時間とは、所定時間あるいは所定回数連続して保護領域A内の物体Mを検知して初めて光走査型光電スイッチ1が保護領域A内に物体Mが存在すると判定するときの所定時間あるいは所定回数連続する時間に相当する設定条件である。したがって、応答時間が短いと検出能力が高くなり、応答時間が長いと検出能力は低くなる。最小検出体は、光走査型光電スイッチ1が確実に検出し得る検出体のサイズのうち最小のものであり、光走査型光電スイッチ1の光軸密度に依存するものである。設定した最小検出体が小さい(光軸密度が高い)と検出能力は高くなり、設定した最小検出体が大きい(光軸密度が低い)と検出能力は低くなる。例えば1走査毎の物体を検出する光軸数を設定し、設定した光軸数以上で物体Mを検知して始めて光走査型光電スイッチ1が保護領域A内に物体Mが存在すると判定するように構成することで、実質的に光軸密度を変化させ、検出能力を変化させることができる。受光感度は、受光信号の増幅率や受光信号に対するしきい値のことであり、増幅率を下げたりしきい値を下げることで検出能力は高くなり、増幅率を下げたりしきい値を上げることで検出能力は低くなる。
【0157】
検出能力と安全機能(ミューティング機能等)とを分けて複数系統出力との関係を説明したが、検出能力と安全機能を複合して各出力系統毎に設定できるのは言うまでもない。複数の出力系統に対して各出力系統毎に個別に検出能力を設定することに関しては、光走査型光電スイッチ1に限らず多光軸光電スイッチや単一の光軸の光電スイッチなどの安全機器にあっても有効であるのは勿論である。例えば多光軸光電スイッチを地面に対して水平に設置し、第1安全出力を機械(危険源)に近い側の一又は複数の光軸を割り当て、第2安全出力を機械(危険源)から遠い側の一又は複数の光軸を割り当てることで、上記の例と同様に第1安全出力を通常の検出能力に設定し、第2安全出力を相対的に高い検出能力に設定することができる。ここに、検出能力とは、応答時間、最小検出体、受光感度などを意味するのは上述したとおりである。
【0158】
他方、複数の出力系統に対して各出力系統毎に個別に安全機能を設定することに関しては、光走査型光電スイッチのように物体Mの位置を検出する安全機器に有効であり、光走査型光電スイッチの他に、安全画像スイッチを挙げることができる。画像素子を内蔵した安全画像スイッチの場合、撮像した二次元画像に対して第1、第2の安全出力に対する保護領域を設定し、或いは1又は複数の安全画像スイッチで撮像した二次元画像から認識される三次元の最大保護空間に対して保護空間を設定して第1、第2の出力系統に対して個別に安全機能を設定すればよい。
【0159】
上記の例では、光走査型光電スイッチ1は、複数系統出力の各系統毎にミューティング機能やインターロック機能などの安全機能の設定や、応答時間、最小検出体や受光感度などの検出能力の設定を行うように構成されているが、更に、他の系統出力の出力状態をそのまま反映して、重畳する自己診断パルスのみを各出力独自にできる設定条件を選択できるように構成してもよいし、その系統出力をOFF状態固定とする条件設定をユーザが選択できるようにしてもよい。このことは安全画像スイッチについても同様である。
【0160】
光電スイッチ間の干渉対策:
図33を参照して前述したように、例えば走行台車130に光走査型光電スイッチ1を搭載した場合に、通路131の近傍に他の光走査型光電スイッチ1が設置されていると、台車1が移動する過程で、台車130の光走査型光電スイッチ1と、通路131の近傍に定置されている他の光走査型光電スイッチ1との間で干渉が発生する可能性がある。勿論、この例は単なる一例であり、複数の走行台車130の間でも、複数の台車130が互いに接近したときにこれら台車130に搭載されている光走査型光電スイッチ1間で干渉の問題が発生する可能性がある。他の例として挙げれば、定置されている複数の光走査型光電スイッチ1の間でも干渉の問題が発生する場合もある。この問題は光走査型光電スイッチ1間に限定されず、光走査型光電スイッチ1と他の種類の光電スイッチ(光電センサと同意義)との間でも干渉の問題を発生する可能性がある。
【0161】
図37は、隣接する2つの光走査型光電スイッチ1A、1Bの各々が投光したレーザ光が入光して干渉する場合と、周囲の構造物で反射したレーザ光が入光して干渉する例を示しおり、図38には、2つの光走査型光電スイッチ1A、1Bが干渉するときの投光パルスのタイムチャートである。隣接する光走査型光電スイッチ1、1間の干渉の問題が発生したときには、対象物(物体M)までの距離を正しく計算できないという問題を誘発する原因となる。
【0162】
光走査型光電スイッチ1は次のパラメータで動作するように設定されている。
(1)光走査型光電スイッチ1は、前述したように円周方向に等間隔に配設した複数のスリットを光が通過する原理を用いた光電式ロータリエンコーダ25を備えているが、このエンコーダ25の出力を使って投光素子LDの投光タイミングが規定されている。このことから、角度分解能は前述したように0.36°であり、(2)回転周期(スキャン周期)は30msであり、(3)投光周期は30μsである。すなわち、1周360°において0.36°毎に投光動作を行うときには、1周360°で合計1000回の投光動作を実行することになる。そして、1周の回転周期(スキャン周期)として30msを設定したときには、投光周期は{30ms/1000}であり、つまり30μsとなる。スキャン周期つまり走査ミラー14が1回転する周期はモータ24の回転速度によって規定される。
【0163】
図39は、光走査型光電スイッチ1が光軸中心から放射状にレーザ光を投光する様子を示しており、図40は投光パルスのタイムチャートであり、この図40の時間レンジを約30ms(1回転周期)まで投光パルスを描いたのが図41である。
【0164】
光走査型光電スイッチ1と、これに隣接する光電スイッチ(光電センサと同意義)との間の干渉を回避する一つの手法を図42に示す。図42は、第1、第2の光走査型光電スイッチ1A、1Bの投光パルスのタイムチャートを示す。この図42から理解できるように、第1、第2の光走査型光電スイッチ1A、1Bの投光パルスの周期は、第1の光走査型光電スイッチ1Aでは30μsに設定されているのに対して、第2の光走査型光電スイッチ1Bでは33μsに設定されており、投光パルスのパルス幅は同じであり、パルス幅を同じにすることで検出感度の影響を抑えることができる。このように第1、第2の光走査型光電スイッチ1A、1Bとの間で異なる投光周期を設定することで、仮にいずれかの光軸で相互干渉が発生したとしても、次のスキャンでは互いに回転周期に36°の位相差が生じるため、複数回のスキャンで連続して干渉することはない。ちなみに、光電スイッチでは、ノイズや浮遊物による誤作動を回避するために複数化の検知で初めて出力を変化させるのが一般的であり、したがって、複数の光電スイッチ間で異なる投光周期を設定することで、実用上、隣接する光電スイッチ間での干渉による誤検出を防止することができる。なお、光走査型光電スイッチ1では、反射光を走査ミラー14で受けた後に受光レンズ20で集光して受光信号を獲得するのが一般的であることから、受光タイミングが同じであったとしても光走査型光電スイッチ1の向きにズレがあれば、一般的に言えば干渉の問題を生じることはない。
【0165】
図43は光走査型光電スイッチ1の基本構成をブロック図的に示す図であり、この図43の光走査型光電スイッチ1は前述の2出力系統(図35)を備えている。投光パルスの周期は、モータ24の回転速度を設定すればよく、これは制御手段30の投受光タイミングを、典型的には外部PCを使って設定すればよい。勿論、光走査型光電スイッチ1の液晶表示部34に設定事項を表示してユーザが操作ボタン36を操作することにより投受光タイミングを設定できるようにしてもよい。設定した投受光タイミングつまり投受光周期は、光走査型光電スイッチ1の内部メモリ147に、設定保護領域A等と一緒に記憶される。
【0166】
図44は、複数の光電スイッチ間の干渉を回避するための第2の手法を説明するための図である。この図44の例は、第1〜第4の四機の光走査型光電スイッチ1A〜1Dが互いに同期線で接続されていることを前提としている。すなわち、第1〜第4の光走査型光電スイッチ1A〜1Dは同期線からの信号で互いにタイミングが規定されており、投光パルスに位相差を設定することで、この第1〜第4の光走査型光電スイッチ1A〜1D間の干渉を防止することができる。投光パルスの位相差として、光走査型光電スイッチ1が投光してから受光信号を取り込むタイミングが2μsであるのが一般的であるとすると、位相差として3μsを設定すれば干渉の問題を解消することができる。
【0167】
図45は、複数の光電スイッチ間の干渉を回避するための第3の手法を説明するための図である。この図45の例は、隣接する二機の光電スイッチ1、1間で干渉が発生し、これを検知したときに、次の光軸以降の投光タイミングに関して、何れか一方又は双方の光電スイッチの投光タイミングを変更することで位相差を設けることを提案するものである。干渉を検知する手法として、例えば、特定の光軸で不連続に受光を検出するものの複数回連続して受光を検出しない、その頻度が所定の頻度以上であるときに光電スイッチ間での干渉とみなすようにしてもよい。勿論、変形例として、干渉を検知したときに、図42で説明した投光パルスの周期や投光周期(モータ24の回転速度)を変更する制御を加えるようにしてもよい。干渉の検出に関し、上述した例の他に、後に図51のフローチャートを参照して投光から受光までの時間差tに基づいて干渉している可能性があると判断したときに、投光パルスの周期や投光周期(モータ24の回転速度)を変更する制御を加えるようにしてもよい。
【0168】
隣接する光走査型光電スイッチ1、1間の干渉を防止するのに、上述したようにモータ24の回転速度を異ならせることでスキャン周期を隣接する光走査型光電スイッチ1、1間で異ならせるのが上述した3つの手法であるが、変形例として、光走査型光電スイッチ1の投光タイミングをクロック制御するのであれば、光走査型光電スイッチ1の投光タイミングの周期を隣接する光走査型光電スイッチ1、1間で異ならせるようにしてもよい。すなわち、投光パルスの周期を隣接する光走査型光電スイッチ1、1間で異ならせる構成を採用してもよい。
【0169】
また、光走査型光電スイッチ1のモータ24の回転速度又は投光パルスの周期の設定変更ことに関して、外部パーソナルコンピュータPCによることなく、上述したように光走査型光電スイッチ1の液晶表示部34と操作ボタン36とを使って外部パーソナルコンピュータPC無しに行うことができるようにしてもよい。後に図48を参照して説明するように、この光電スイッチ1は、幾つかのパラメータについて液晶表示部34と操作ボタン36を使って設定できるようになっているが、このパラメータの設定事項の一つに、モータ24の回転速度又は投光パルスの周期を加えることで、外部パーソナルコンピュータPCを使うことなく、ユーザが隣接する光走査型光電スイッチ1、1間の干渉を防止することができる。また、光走査型光電スイッチ1の内部メモリ147(図43)に複数の投光パルスの周期又は複数の投光パルスの周期を記憶させておき、この中からユーザが任意に選択して、所望の投光パルスの周期又は複数の投光パルスの周期を設定できるように構成してもよい。勿論、前述した投光から受光までの時間差tに基づいて干渉している可能性があると判断したときに(図51)、投光パルスの周期や投光周期(モータ24の回転速度)を内部メモリ147に記憶されている他の投光パルスの周期や投光周期(モータ24の回転速度)に切り替える制御を行うようにしてもよい。
【0170】
図37乃至図45を参照して他の光電スイッチ(光電センサ)との干渉の問題を解消する手法を説明したが、これ以外の外乱光による問題がある。光走査型光電スイッチ1の反射光に外乱光が重畳すると誤った位置情報を検出してしまうという問題に至り易い。この問題に対処するために、光走査型光電スイッチ1は、(1)光学フィルタの機能を有する光透過カバー62を採用し、(2)フィルタ回路を採用して対象物(物体M)からの反射光以外の周波性成分の信号を除去することが行われているが完全という訳ではない。
【0171】
外乱光による影響を受ける可能性がある場合、ユーザは光走査型光電スイッチ1の取り付け角度や取り付け高さを調整することになるが、この調整を行うに際して、外乱光がどの方向から入射しているかを確認できれば好都合である。また、調整後に外乱光の影響が無くなったか否かを確認できれば、光走査型光電スイッチ1の誤動作が発生する毎に光走査型光電スイッチ1の設置位置の調整を繰り返す必要性も無くなる。前述したように光電スイッチは、複数回の計測値つまり測距値が連続して保護領域Aの内側にあることを検知した後に出力を変化させるように設定するのが一般的であるため、外乱光が直ちに誤動作を誘発することに至らないにしても、検出能力が劣化した状態(応答時間が長くなった状態)で動作している可能性があり、このことは安全機器としての光走査型光電スイッチ1としては好ましくない。
【0172】
光走査型光電スイッチ1は、(1)「運転モード」、(2)「モニタモード」、(3)「設定モード」の3つの動作モードを有し、動作モードを切り替えると、光走査型光電スイッチ1の液晶表示部34には図46の表示に切り替わる。この図46は、液晶表示部34の表示の遷移図であり、図46の参照符号34(a)は運転モードで動作中の表示を示し、参照符号34(b)はモニタモードのメニュー画面を示し、参照符号34(c)は設定モードのメニュー画面を示す。
【0173】
前述した図6(b)を参照して、ユーザインターフェース部36には、液晶表示部34に隣接して、操作ボタン36a〜36eが配設されている。上下ボタン36a、36bは、数値入力や表示画面切替えのためのキーである。例えば、上ボタン36aは、数値をインクリメントするアップキーとして用いることができる。また、下ボタン36bは、数値をデクリメントするダウンキーとして用いることができる。液晶表示部34の下方且つ隣接して3つの操作ボタン36c〜36eが横並びに配列されているが、これらの操作ボタン36c〜36eは動作モードの切替えや設定値確定のためのキーとして用いられる。例えば、中央操作ボタン36cはモード切替えに用いられ、右の操作ボタン36eはエンター(Enter)キーであり、左の操作ボタン36dは、エスケープ(Esc)キーである。
【0174】
「運転モード」が選択されると光走査型光電スイッチ1は侵入物Mの検知を実行する。「運転モード」から「モニタモード」ヘの切替えは、中央操作ボタン36c操作することによって行うことができる。また、「モニタモード」での動作中に、左の操作ボタン36d(Escキー)を操作することで「運転モード」に復帰させることができる。
【0175】
図47を参照して、「モニタモード」は、入出力状態、エリア監視状況、検知履歴などを表示する動作モードである。入出力状態としては、光走査型光電スイッチ1の安全出力の状態、外部リレー回路からの入力状態などを液晶表示部34に表示してモニタすることができる。エリア監視状況としては、設定されている監視エリアの形状、サイズ、検知された侵入物までの距離などをモニタすることができる。検知履歴としては、安全出力がオフ時の検知履歴として、動作不許可信号を出力させるトリガとなった侵入物の位置及び検知された時刻と、エラー情報などが保持される。このエラー情報の履歴には、安全出力がOFFした時刻及びOFFした要因(何故、安全出力がOFFになったのかその原因)が含まれ、また、外乱光が原因で安全出力がOFFしたときには、外乱光の方位を規定する光軸番号がエラー情報の履歴に含まれる。
【0176】
検知履歴は、最新のものから順に表示させることができる。この様な検知履歴は、最大で20件保持され、新たな検知履歴が得られるごとに最も古いものから順にクリアされる。侵入物の位置情報としては、例えば、光走査型光電スイッチ1を中心とする直交座標を用いて、侵入物の位置を示す数値が表示される。また、セーフティセンサ1から侵入物までの距離Dを示す数値が表示される。また、エラー情報としては、例えば、光透過カバー62の汚れや出力短絡などによる不具合の発生を示す情報が表示される。また、履歴情報としては、位置情報、エラー情報の他に、外部機器からのチェック入力を示す情報がある。このチェック入力は、安全出力が正しくオフするか否かを確認するための外部入力である。
【0177】
「設定モード」は、保護領域Aを指定するためのパラメータや外部入力の設定が行われる動作モードである。運転モードから設定モードヘは、中央操作ボタン36c操作することによって行うことができる。また、「設定モード」での動作中に、左の操作ボタン36d(Escキー)を操作することで「運転モード」に復帰させることができる。設定スタート画面には、選択可能なメニュー項目が配置され、上下操作ボタン36a、36bを操作することによって所望のメニュー項目を選択することができる。
【0178】
図48は、設定モードにおいてパラメータの設定に関する表示画面の一例が示されている。設定変更が可能なパラメータは、再スタート設定、EDM、検知分解能、応答時間などを含む。再スタートつまりリ・スタートは、光走査型光電スイッチ1を手動で再スタートさせるか自動で再スタートさせるかを選択することができる。EDMに関しては、外部リレーモニタ機能をオンするかオフするかを選択することができる。侵入物(物体M)の検知分解能は所定の範囲内で任意に指定することができる。
【0179】
光走査型光電スイッチ1に接続した外部パーソナルコンピュータPC(図13)によってエラー情報の履歴を確認することができる。外部パーソナルコンピュータPCには、エラー情報の履歴を表示するためのアプリケーションがインストールされており、このプログラムを使ってパーソナルコンピュータPCのディスプレイ81に表示させることができる。
【0180】
図49は、パーソナルコンピュータPCによるエラー情報表示に含まれる外乱光の画面表示の例を示す。パーソナルコンピュータPCのディスプレイ81には、その一側に、エラー情報の履歴が時系列に表示される。この一覧表示には、各エラー情報毎に、(1)エラーの原因、(2)エラー発生時刻、(3)好ましくはエラーが発生した光軸番号が含まれる。ユーザが任意のエラー履歴を選択すると、光走査型光電スイッチ1のシンボルBと共に外乱光の方位が目立つ色で表示される。この外乱光に関する表示を、常時表示とするか、常時は非表示としてユーザが希望したときに表示するかをオプションで設定できるようにしてもよい。図49は、パーソナルコンピュータPCが接続された光走査型光電スイッチ1が動作状態にあるときのパーソナルコンピュータPCのディスプレイ81の表示例が図示されており、パーソナルコンピュータPCによって光走査型光電スイッチ1の動作が常時モニタされている状態にある。この図49において、光走査型光電スイッチ1のシンボルSの周囲に見られる黒丸は安全出力がOFF状態となった際の原因箇所の履歴、例えば保護領域A内での物体Mの検出位置の履歴を示す。図49は、シンボルSから上方に扇状に広がるハッチングを付した領域に数多くの外乱光が見られ、この外乱光は、シンボルSから放射状に延びる直線で表示される。したがって、ユーザは、シンボルSから放射状に延びる直線を見ることで外乱光の方位を知ることができる。
【0181】
また、次に説明するように外乱光を検出したときに、これを光走査型光電スイッチ1の液晶表示部34に、図50に例示するように「警告(Alert) 光干渉(Light Interference)」と文字表示するのが好ましい。
【0182】
外乱光の検知方法について説明すると、光走査型光電スイッチ1は、投光した光が対象物(物体M)にぶつかって反射するときに投光タイミングと受光タイミングとの時間差tによって距離を計測し、また、受光した光軸番号によって方位を検知する。また、計測した距離を受光強度によって補正することで、距離の検知の正確性を高めるように設計されるのが一般的である。したがって、投光タイミングと受光タイミングとの時間差tが所定の範囲内であれば、対象物(物体M)による反射光であり正規の光であるとみなすことができる。換言すると、投光タイミングと受光タイミングとの時間差tが非常に小さいときには外乱光であるとみなすことができる。また、投光タイミングと受光タイミングとの時間差tが非常に大きいときにも外乱光であるとみなすことができる。したがって、投光タイミングと受光タイミングとの時間差tが所定の範囲外であるとき、つまり所定の範囲よりも時間差tが小さいとき及び所定の範囲よりも時間差tが大きいときにはエラー履歴に記憶され、また、光走査型光電スイッチ1の液晶表示部34にエラー表示される。また、光走査型光電スイッチ1が方位を示すインジケータを備えているときには、外乱光の方位をこのインジケータによって表示するのが好ましい。
【0183】
安全性の確保において問題になるのが、投光タイミングと受光タイミングとの時間差tが所定の範囲よりも小さいときであり、この場合には、光走査型光電スイッチ1では出力状態をOFFに移行させる処理を実行するのが好ましい。
【0184】
図51は、外乱検知の具体的な手法の一例を示すフローチャートである。前述したように、所定の周期で投光が実行され(ステップS10)、各光軸番号毎に受光の有無が判定される(ステップS11)。そして受光があれば、対応する光軸番号の投光から受光までの時間差tが演算され(ステップS12)、この時間差tが予め設定されている最小時間差Tminと最大時間差Tmaxとの範囲に含まれているか否かの判定が行われる(ステップS13)。そして、YESつまり実際の時間差tが所定の範囲内であれば、ステップS14に進んで、従来と同様に、対象物(物体M)の位置(距離)を計測する。なお、対象物(物体M)の方位は、光軸番号つまり投光時刻によって規定することができる。そして、対象物(物体M)の位置が保護領域であるときにはステップS15からステップS16で光走査型光電スイッチ1の出力をOFF状態に移行させ、また、ステップS17でオフ履歴が作成されてメモリ147(図43)に記憶される。また、警告領域であるときには、ステップS18からステップS19に進んで、警告領域に侵入した作業者に対して例えば赤色ランプの点灯やブザーなどにより警報が行われる。
【0185】
上記ステップS13において、投光から受光までの時間差tが、最小時間差Tminと最大時間差Tmaxとの範囲外であると判定されたときには異常であると判定される。すなわち、このステップS13は異常判定手段を構成し、異常であると判定されたときにはステップS20に進んでエラー履歴が作成され、このエラー履歴はメモリ147(図43)に記憶される。また、ステップS21で、投光から受光までの時間差tが最小時間差Tminよりも小さいときには、光走査型光電スイッチ1に近い領域での現象とみなすことができ安全性を阻害する可能性があるとして、ステップS22に進んで光走査型光電スイッチ1の出力をOFF状態に移行させ、また、ステップS23でオフ履歴(OFF履歴)が作成され、このオフ履歴はメモリ147(図43)に記憶される。なお、ステップS13において異常と判定されたときに液晶表示部34に異常を示す表示が行われる(図50)。
【0186】
ユーザは、エラー履歴及びオフ履歴を参照することで、問題の発生原因が一時的な要因(例えば埃)であるのか継続的な要因(外乱光)であるのかを峻別することができる。外乱光であるとみされるときには、オフ履歴及びエラー履歴を外部パーソナルコンピュータPCを使って外乱情報の詳細を表示することで方位を特定することができ、これにより光走査型光電スイッチ1の設置角度や設置高さを変更することで対処することができる。
【0187】
光走査型光電スイッチ1に液晶表示部34を設けることで、図50を参照して説明したとおり、この液晶表示部34を使ってエラー表示を行うことができ、これを見て必要であればユーザは外部パーソナルコンピュータPCを使って外乱の分析を行うことができるが、図52に図示するように、光走査型光電スイッチ1に方向を指し示すことのできる方位インジケータ160を設け、この方位インジケータ160を使って問題の原因の方位を指し示すようにしてもよい。ちなみに、この図52に例示の光走査型光電スイッチ1は、その頂部に、円弧状に複数のLED160aを等間隔に配置し、外乱の原因の方位に合致するLEDインジケータ160を点灯することで方位を差し示すことができる。
【0188】
光走査型光電スイッチ1の検出感度維持及び調整機構の具体的な調整手順:
図9〜図12を参照して前述した検出感度維持及び調整機構を具体的に説明する。この検出感度維持及び調整機構は、光走査型光電スイッチ1の内部に基準対象物としての2つの反射率の異なる第1、第2の反射面73、74を含んでいる。そして、光走査型光電スイッチ1は、この基準対象物としての第1、第2の反射面73、74を、走査ミラー14の回転において無効範囲つまり測定領域以外の範囲に配設することで、測定領域での走査で用いる投光経路、受光経路、レーザ光源LD、受光素子(光電変換素子)22を共用する構成が採用されている。このことから、走査ミラー14の測定領域以外の無効回転範囲において基準対象物(第1、第2の反射面73、74)に対して投光し、そして、これにより得られる受光信号情報を監視することで光走査型光電スイッチ1の検出感度の劣化を確認することができる。
【0189】
光走査型光電スイッチ1を工場から出荷する際に、光走査型光電スイッチ1が光透過カバー62を検知しない走査範囲、つまりパルス状のレーザ光が第1、第2の反射面73、74を走査しているときに、製品仕様を満足することのできる最適な検出感度が得られるように投光強度及び/又は受光ゲインを調整する。この調整が完了した状態において例えば光軸番号「60」(この光軸番号「60」は第2反射面(白)73に投光したときの光軸番号に相当する)に投光したときの受光強度が「600」であったとすると、この光軸番号60の受光強度「600」をメモリ147(図43)に記憶する。また、例えば光軸番号「10」(この光軸番号「10」は第1反射面(黒)72に投光したときの光軸番号に相当する)に投光したときの受光強度が「100」であったとすると、この光軸番号10の受光強度「100」をメモリ147(図43)に記憶する。
【0190】
上記の工場出荷時の手順を図53に基づいて説明する。先ず、ステップS100で光透過カバー62を通じてパルスレーザ光を対象物に投光したときに得られる受光信号情報を取得して、対象物までの距離を計測する。次いで、ステップS101で、対象物を検知できているか否かを判定して、NOであれば、ステップS102に進んで、投光駆動部150(図43)を制御して投光強度を増加及び/又は電源回路152(図43)の電圧を増加させることで受光素子22の受光ゲインを増加させ、再びステップS100に進んで、調整後の投光強度及び/又は受光ゲインに基づいて対象物までの距離の計測が行われる。そして、ステップS101で対象物を検知できていると判定されたときにはステップS103に進んで、光透過カバー62を通じてパルスレーザ光を対象物に投光したときに得られる受光信号情報を取得して、対象物までの距離を計測する。
【0191】
次のステップS104において、光透過カバー62を検知しているか否かの判定が行われ、このステップS104でYESのときには、投光駆動部150(図43)を制御して投光強度を減少及び/又は電源回路152(図43)の電圧を低下させることで受光素子22の受光ゲインを減少させた後に再びステップS103に進んで、調整後の投光強度及び/又は受光ゲインに基づいて対象物までの距離の計測が行われる。そして、ステップS104で光透過カバー62の検知が認められないときには、投光強度及び受光ゲインを最適値に調整できたとして、ステップS106に進んで、基準対象物の一つである白の第2反射面74へ投光したときの受光強度(「基準受光強度RE(白)」という)をメモリ147(図43)に記憶させる。また、次のステップS107で、基準対象物の他の一つである黒の第1反射面73へ投光したときの受光強度(「基準受光強度RE(黒)」という)をメモリ147(図43)に記憶させる。
【0192】
以上が工場出荷前の手順である。次に、光走査型光電スイッチ1が自律的に検出感度を調整する手順を図54に基づいて説明する。先ず、ステップS200において光軸番号50(白の第1反射面74(図12)へ投光したときに得られる受光強度を取得する。この受光強度は受光部を構成するA/Dコンバータ154(図43)を通じて取得することができる。この取得した受光強度を「実際の受光強度(白)」と呼ぶ。次いで、メモリ147から「基準受光強度RE(白)」を取り込み(ステップS201)、そして次のステップS202で、「実際の受光強度(白)」が「基準受光強度RE(白)」よりも小さいか否かの判定が行われる。このステップS202においてYESと判別されたときには、「実際の受光強度(白)」が低下しているということで、ステップS203に進んで、投光駆動部150(図43)を制御して投光強度を増加及び/又は電源回路152(図43)の電圧を増加させることで受光素子22の受光ゲインを増加させる。そして、次のステップS204で「実際の受光強度(白)」が「基準受光強度RE(白)」よりも大きいか否かの判定が行われ、YESつまり「実際の受光強度(白)」が高くなっているということで、ステップS205に進んで、投光駆動部150(図43)を制御して投光強度を低下及び/又は電源回路152(図43)の電圧を低下させることで受光素子22の受光ゲインを減少させる。
【0193】
次に、光走査型光電スイッチ1が自律的に故障検知する手順を図55に基づいて説明する。ステップS300において光軸番号10(黒の第1反射面73(図12)へ投光したときに得られる受光強度を取得する。この受光強度は受光部を構成するA/Dコンバータ154(図43)を通じて取得することができる。この取得した受光強度を「実際の受光強度(黒)」と呼ぶ。次いで、メモリ147から「基準受光強度RE(黒)」を取り込み(ステップS301)、そして、次のステップS302で、「実際の受光強度(黒)」が「基準受光強度RE(黒)−許容値」よりも小さいか否かの判定が行われる。このステップS302においてYESと判別されたときには、「実際の受光強度(黒)」が異常に低下しているということで、ステップS303に進んで、光走査型光電スイッチ1が故障と判断して、光走査型光電スイッチ1を安全状態へ移行させる。この安全状態の典型的な処理は光走査型光電スイッチ1の出力をOFFに変化させる処理である。また、「実際の受光強度(黒)」が「基準受光強度RE(黒)+許容値」よりも大きいときにもステップS204からステップS303に進んで、光走査型光電スイッチ1が故障と判断して、光走査型光電スイッチ1を安全状態へ移行させる。
【符号の説明】
【0194】
1 光走査型光電スイッチ
L1 レーザ光
L2 反射光
LD 投光素子
10 投光レンズ
11、12 投光用ミラー
14 光走査手段(走査ミラー)
20 受光レンズ
21 受光反射体
22 光電変換素子(受光素子)
24 モータ(走査ミラーを駆動)
30 制御手段
88 設定領域記憶部(記憶手段)
147 光走査型光電スイッチの内部メモリ
Tr 外部入力受付端子
【特許請求の範囲】
【請求項1】
光を二次元的に走査して物体を検出すると共に該物体までの距離を計測して該物体の二次元位置を検知し、該物体の二次元位置が、予め設定された保護領域内であるときに物体の存在有りの判定を行って、安全信号の出力を制御する出力制御部から安全信号を出力する光走査型光電スイッチにおいて、
前記保護領域と、該保護領域の領域内に設定される付加機能エリアと、該付加機能エリアに設定される付加機能を実行する成立条件とを記憶した記憶手段と、
外部入力を受け付ける受付端子と、
該受付端子で受け取った前記外部入力に基づいて、該外部入力が前記記憶手段に記憶されている成立条件を満すときに前記付加機能を実行する付加機能実行信号を前記出力制御部に供給する付加機能実行信号生成部と、
を有し、
前記外部入力に基づいて、前記保護領域に含まれる前記付加機能エリアの付加機能によって前記安全信号の出力が制御されることを特徴とする光走査型光電スイッチ。
【請求項2】
前記付加機能エリアが、前記保護領域の一部のエリアであって、前記光走査型光電スイッチから離れた端を含むエリアに設定される、請求項1に記載の光走査型光電スイッチ。
【請求項3】
前記付加機能エリアが、前記光走査型光電スイッチから離間して設定される、請求項2に記載の光走査型光電スイッチ。
【請求項4】
前記光走査型光電スイッチが前記受付端子を複数個有し、
前記記憶手段には複数の前記付加機能エリアが各受付端子に関連付けて記憶され、
外部入力された前記受付端子によって、該外部入力された受付端子に関連付けられている前記付加機能エリアが選択され、
前記付加機能実行信号生成部では、前記選択された付加機能エリアに対して前記付加機能実行信号が生成される、請求項1〜3のいずれか一項に記載の光走査型光電スイッチ。
【請求項5】
前記付加機能が、前記付加機能エリア内に物体を検知しても、この物体の検知を一時的に無効化するミューティング機能である、請求項1又は4に記載の光走査型光電スイッチ。
【請求項6】
請求項1〜5のいずれか一項の光走査型光電スイッチと、該光走査型光電スイッチの設定を行うプログラムを実行可能なパーソナルコンピュータとからなる光電スイッチ設定装置を使って前記追加機能エリアを設定する領域設定方法であって、
前記パーソナルコンピュータのディスプレイに表示された設定画面に、前記光走査型光電スイッチのシンボルと共に表示される保護領域を第1の色で表示する保護領域表示工程と、
前記設定画面に表示の保護領域に重畳して、ユーザが指定したエリアを表示する指定エリアを前記第1の色とは異なる第2の色で重畳表示する指定エリア表示工程と、
ユーザが指定した前記指定エリアをユーザが確認して確認の入力をすることで、前記保護領域と前記ユーザが指定したエリアとがオーバーラップするエリアを付加機能エリアとして設定する付加機能エリア設定工程と、
該付加機能エリア設定工程の次に、前記保護領域からはみ出した前記指定エリアを削除して、前記保護領域と前記ユーザが指定したエリアとがオーバーラップするエリアを付加機能エリアとして前記保護領域に重畳表示すると共に、該付加機能エリアを前記保護エリアの前記第1の色とは異なる色で表示する付加機能エリア表示工程とを有する光走査型光電スイッチの領域設定方法。
【請求項7】
前記指定エリア表示工程の次に、
前記ユーザが指定した指定エリアが前記光走査型光電スイッチのシンボルから見て前記指定エリアよるも遠いエリアが前記保護エリア内に存在するときに、該遠いエリアを影エリアとして前記ユーザが指定したエリアに追加して表示する影エリア表示工程と、
該影エリアの挿入をユーザが許容するか否かの確認を行う影エリア確認工程と、
該影エリア確認工程においてユーザが許容する入力に基づいて、前記ユーザが指定した指定エリアとして追加する、影エリア追加工程とを更に有し、
該影エリア追加工程の後に、前記付加機能エリア設定行程に移行する、請求項6に記載の光走査型光電スイッチの領域設定方法。
【請求項8】
光を二次元的に走査して物体を検出すると共に該物体までの距離を計測して該物体の二次元位置を検知し、該物体の二次元位置が、予め設定された保護領域内であるときに物体の存在有りの判定を行って安全信号の出力を制御する出力制御部から安全信号を出力する光走査型光電スイッチにおいて、
前記保護領域と、該保護領域の領域内に設定され且つ物体を検知してもこの物体の検知を一時的に無効化するミューティング機能が設定されたミューティングエリアと、該ミューティングエリアのミューティング機能を実行する成立条件とを記憶した記憶手段と、
外部入力を受け付ける受付端子と、
該受付端子で受け取った前記外部入力に基づいて、該外部入力が前記記憶手段に記憶されている成立条件を満すときに前記ミューティング機能を実行するミューティング機能実行信号を前記出力制御部に供給するミューティング機能実行信号生成部と、を有し、
前記外部入力に基づいて、前記保護領域に含まれる前記ミューティングエリアのミューティング機能によって前記安全信号の出力が制御される光走査型光電スイッチに接続された外部パーソナルコンピュータを使って前記ミューティングエリアを設定するためのプログラムであって、
前記パーソナルコンピュータのディスプレイに設定画面を表示して、該設定画面に前記光走査型光電スイッチのシンボルと共に表示される保護領域を第1の色で表示する保護領域表示手順と、
前記設定画面に表示の保護領域に重畳して、ユーザが指定したエリアを表示する指定エリアを前記第1の色とは異なる第2の色で重畳表示する指定エリア表示手順と、
ユーザが指定した前記指定エリアをユーザが確認して確認の入力をすることで、前記保護領域と前記ユーザが指定したエリアとがオーバーラップするエリアを付加機能エリアとして設定する付加機能エリア設定手順と、
該付加機能エリア設定工程の次に、前記保護領域からはみ出した前記指定エリアを削除して、前記保護領域と前記ユーザが指定したエリアとがオーバーラップするエリアを付加機能エリアとして前記保護領域に重畳表示すると共に、該付加機能エリアを前記保護エリアの前記第1の色とは異なる色で表示する付加機能エリア表示手順を前記外部コンピュータに実行させるためのプログラム。
【請求項1】
光を二次元的に走査して物体を検出すると共に該物体までの距離を計測して該物体の二次元位置を検知し、該物体の二次元位置が、予め設定された保護領域内であるときに物体の存在有りの判定を行って、安全信号の出力を制御する出力制御部から安全信号を出力する光走査型光電スイッチにおいて、
前記保護領域と、該保護領域の領域内に設定される付加機能エリアと、該付加機能エリアに設定される付加機能を実行する成立条件とを記憶した記憶手段と、
外部入力を受け付ける受付端子と、
該受付端子で受け取った前記外部入力に基づいて、該外部入力が前記記憶手段に記憶されている成立条件を満すときに前記付加機能を実行する付加機能実行信号を前記出力制御部に供給する付加機能実行信号生成部と、
を有し、
前記外部入力に基づいて、前記保護領域に含まれる前記付加機能エリアの付加機能によって前記安全信号の出力が制御されることを特徴とする光走査型光電スイッチ。
【請求項2】
前記付加機能エリアが、前記保護領域の一部のエリアであって、前記光走査型光電スイッチから離れた端を含むエリアに設定される、請求項1に記載の光走査型光電スイッチ。
【請求項3】
前記付加機能エリアが、前記光走査型光電スイッチから離間して設定される、請求項2に記載の光走査型光電スイッチ。
【請求項4】
前記光走査型光電スイッチが前記受付端子を複数個有し、
前記記憶手段には複数の前記付加機能エリアが各受付端子に関連付けて記憶され、
外部入力された前記受付端子によって、該外部入力された受付端子に関連付けられている前記付加機能エリアが選択され、
前記付加機能実行信号生成部では、前記選択された付加機能エリアに対して前記付加機能実行信号が生成される、請求項1〜3のいずれか一項に記載の光走査型光電スイッチ。
【請求項5】
前記付加機能が、前記付加機能エリア内に物体を検知しても、この物体の検知を一時的に無効化するミューティング機能である、請求項1又は4に記載の光走査型光電スイッチ。
【請求項6】
請求項1〜5のいずれか一項の光走査型光電スイッチと、該光走査型光電スイッチの設定を行うプログラムを実行可能なパーソナルコンピュータとからなる光電スイッチ設定装置を使って前記追加機能エリアを設定する領域設定方法であって、
前記パーソナルコンピュータのディスプレイに表示された設定画面に、前記光走査型光電スイッチのシンボルと共に表示される保護領域を第1の色で表示する保護領域表示工程と、
前記設定画面に表示の保護領域に重畳して、ユーザが指定したエリアを表示する指定エリアを前記第1の色とは異なる第2の色で重畳表示する指定エリア表示工程と、
ユーザが指定した前記指定エリアをユーザが確認して確認の入力をすることで、前記保護領域と前記ユーザが指定したエリアとがオーバーラップするエリアを付加機能エリアとして設定する付加機能エリア設定工程と、
該付加機能エリア設定工程の次に、前記保護領域からはみ出した前記指定エリアを削除して、前記保護領域と前記ユーザが指定したエリアとがオーバーラップするエリアを付加機能エリアとして前記保護領域に重畳表示すると共に、該付加機能エリアを前記保護エリアの前記第1の色とは異なる色で表示する付加機能エリア表示工程とを有する光走査型光電スイッチの領域設定方法。
【請求項7】
前記指定エリア表示工程の次に、
前記ユーザが指定した指定エリアが前記光走査型光電スイッチのシンボルから見て前記指定エリアよるも遠いエリアが前記保護エリア内に存在するときに、該遠いエリアを影エリアとして前記ユーザが指定したエリアに追加して表示する影エリア表示工程と、
該影エリアの挿入をユーザが許容するか否かの確認を行う影エリア確認工程と、
該影エリア確認工程においてユーザが許容する入力に基づいて、前記ユーザが指定した指定エリアとして追加する、影エリア追加工程とを更に有し、
該影エリア追加工程の後に、前記付加機能エリア設定行程に移行する、請求項6に記載の光走査型光電スイッチの領域設定方法。
【請求項8】
光を二次元的に走査して物体を検出すると共に該物体までの距離を計測して該物体の二次元位置を検知し、該物体の二次元位置が、予め設定された保護領域内であるときに物体の存在有りの判定を行って安全信号の出力を制御する出力制御部から安全信号を出力する光走査型光電スイッチにおいて、
前記保護領域と、該保護領域の領域内に設定され且つ物体を検知してもこの物体の検知を一時的に無効化するミューティング機能が設定されたミューティングエリアと、該ミューティングエリアのミューティング機能を実行する成立条件とを記憶した記憶手段と、
外部入力を受け付ける受付端子と、
該受付端子で受け取った前記外部入力に基づいて、該外部入力が前記記憶手段に記憶されている成立条件を満すときに前記ミューティング機能を実行するミューティング機能実行信号を前記出力制御部に供給するミューティング機能実行信号生成部と、を有し、
前記外部入力に基づいて、前記保護領域に含まれる前記ミューティングエリアのミューティング機能によって前記安全信号の出力が制御される光走査型光電スイッチに接続された外部パーソナルコンピュータを使って前記ミューティングエリアを設定するためのプログラムであって、
前記パーソナルコンピュータのディスプレイに設定画面を表示して、該設定画面に前記光走査型光電スイッチのシンボルと共に表示される保護領域を第1の色で表示する保護領域表示手順と、
前記設定画面に表示の保護領域に重畳して、ユーザが指定したエリアを表示する指定エリアを前記第1の色とは異なる第2の色で重畳表示する指定エリア表示手順と、
ユーザが指定した前記指定エリアをユーザが確認して確認の入力をすることで、前記保護領域と前記ユーザが指定したエリアとがオーバーラップするエリアを付加機能エリアとして設定する付加機能エリア設定手順と、
該付加機能エリア設定工程の次に、前記保護領域からはみ出した前記指定エリアを削除して、前記保護領域と前記ユーザが指定したエリアとがオーバーラップするエリアを付加機能エリアとして前記保護領域に重畳表示すると共に、該付加機能エリアを前記保護エリアの前記第1の色とは異なる色で表示する付加機能エリア表示手順を前記外部コンピュータに実行させるためのプログラム。
【図1】


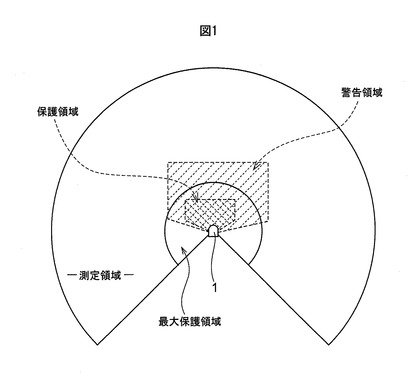
【図2】

【図3】

【図4】
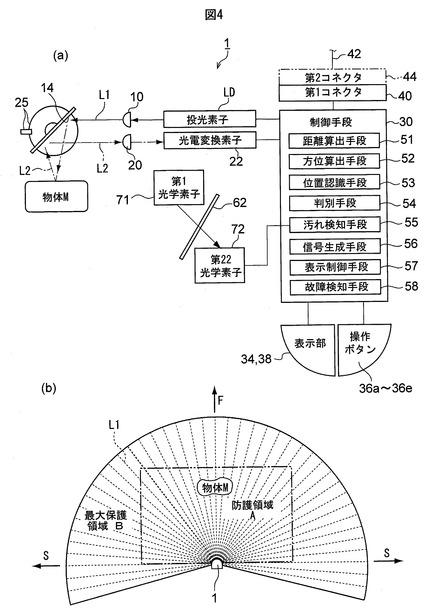
【図5】

【図6】

【図7】

【図8】
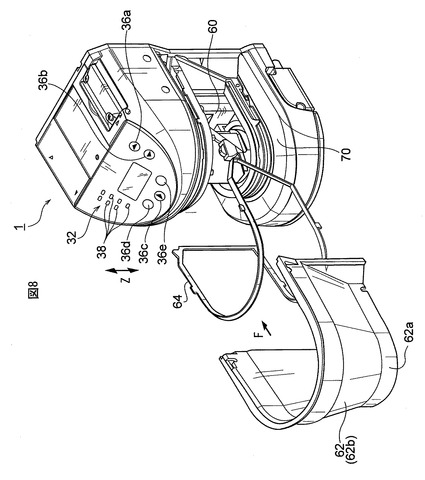
【図9】

【図10】
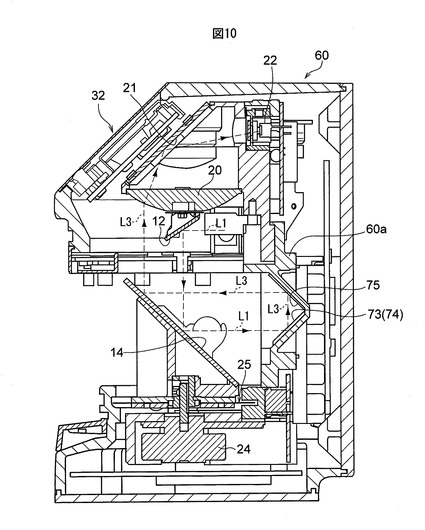
【図11】
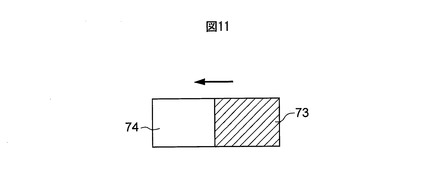
【図12】
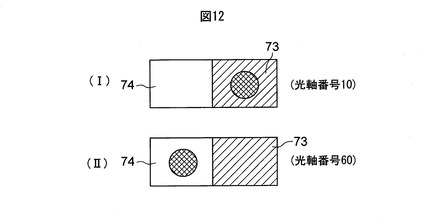
【図13】

【図14】
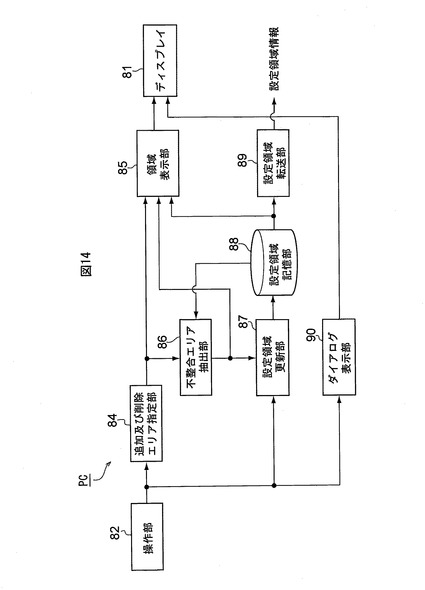
【図15】
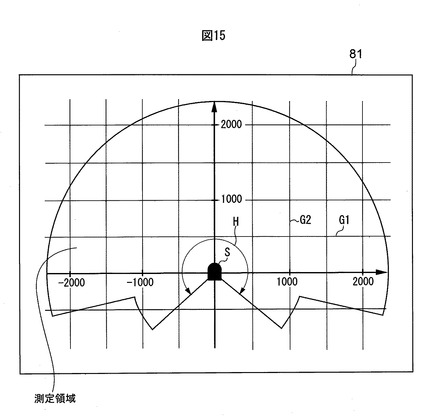
【図16】
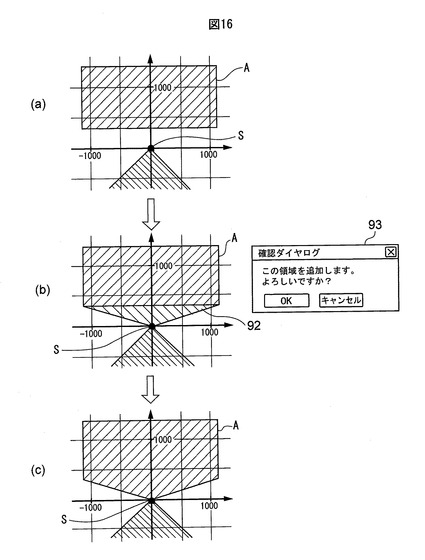
【図17】

【図18】
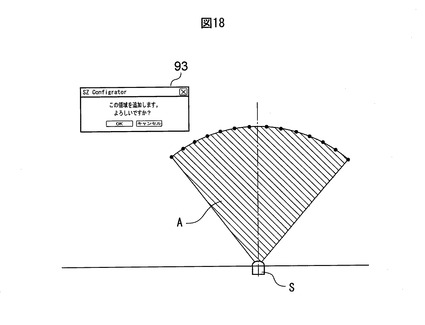
【図19】

【図20】
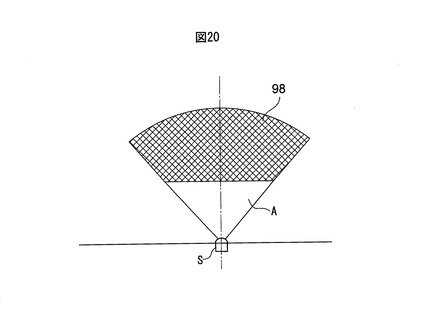
【図21】
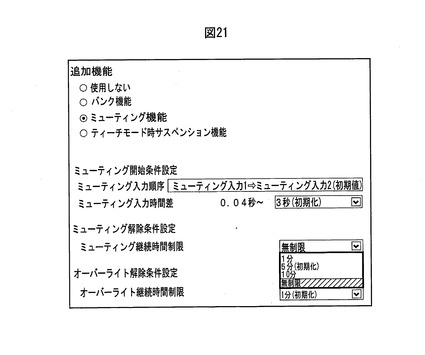
【図22】
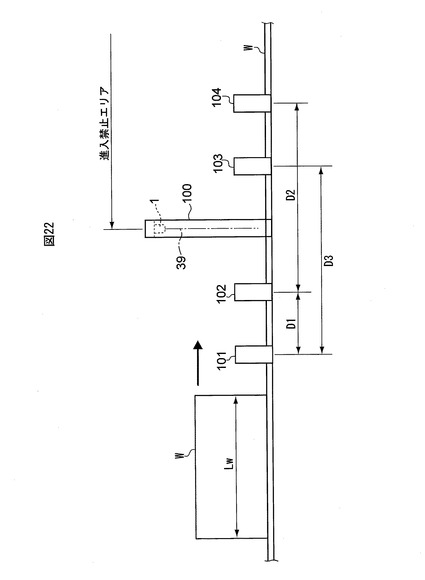
【図23】
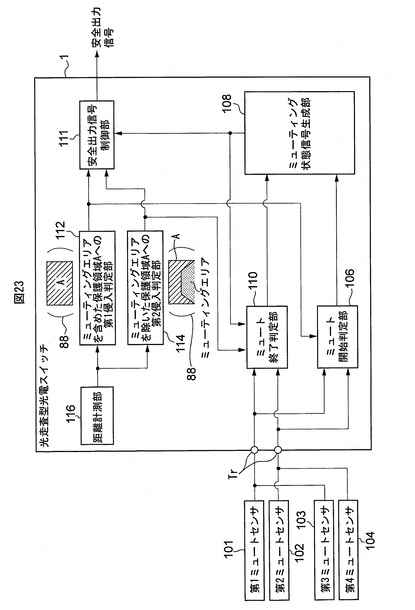
【図24】
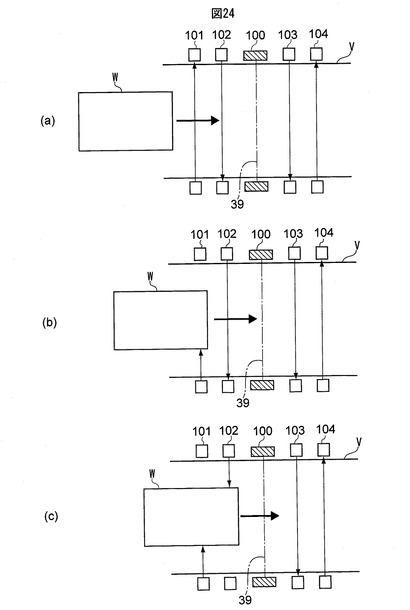
【図25】

【図26】
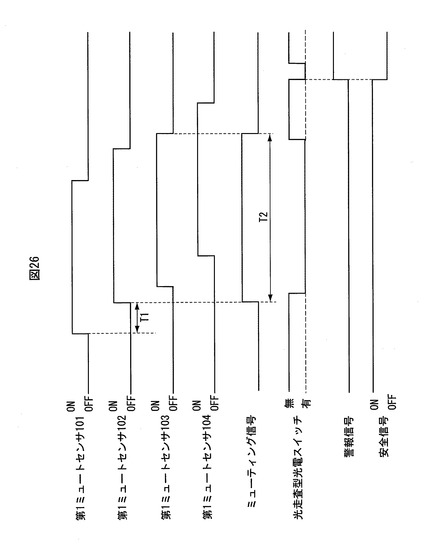
【図27】
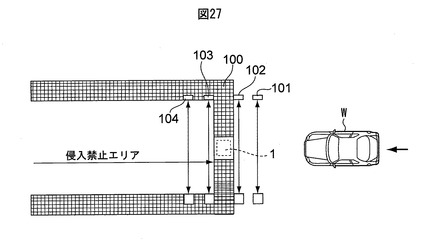
【図28】

【図29】
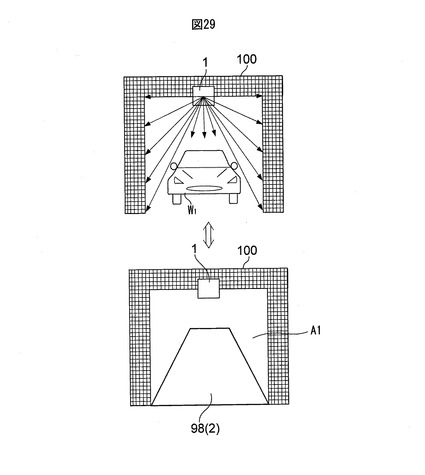
【図30】
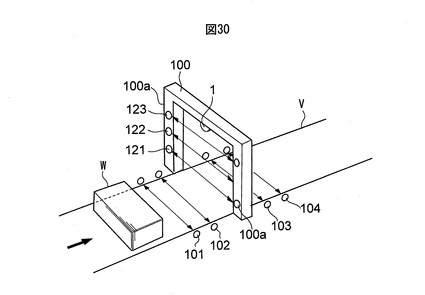
【図31】

【図32】

【図33】
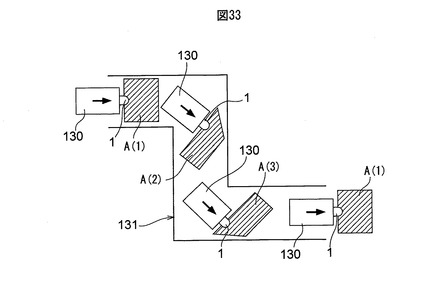
【図34】
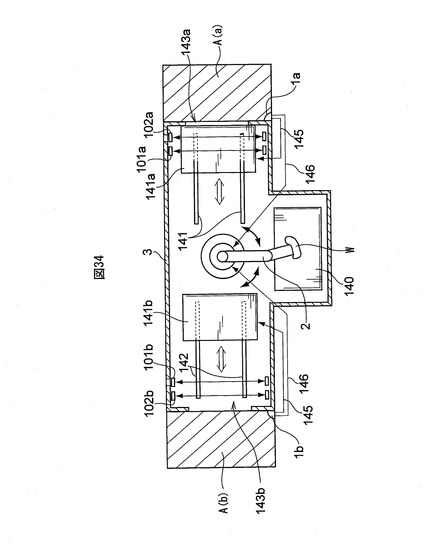
【図35】

【図36】
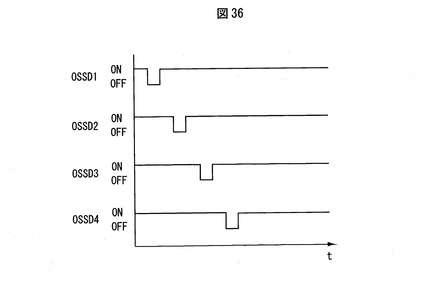
【図37】

【図38】
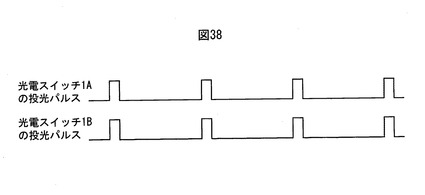
【図39】
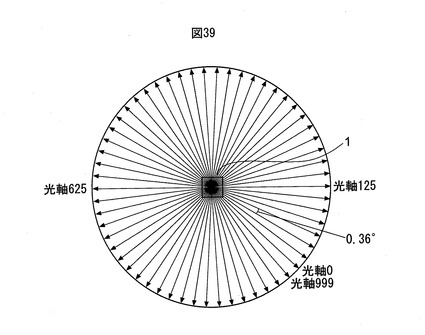
【図40】
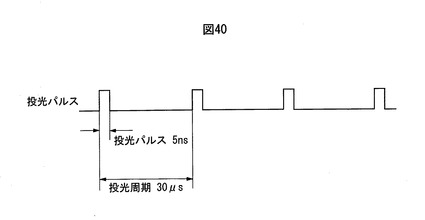
【図41】
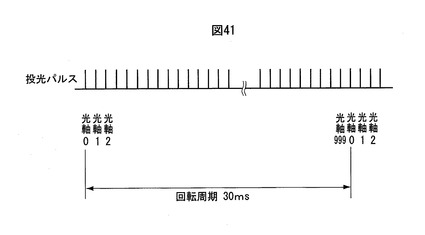
【図42】
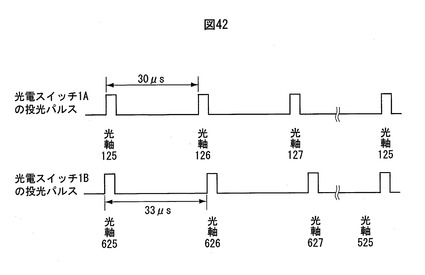
【図43】
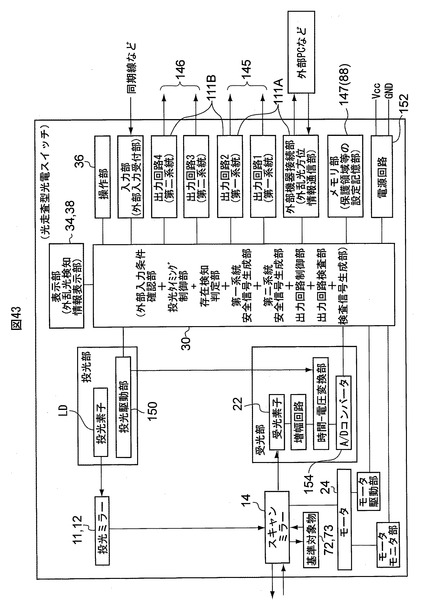
【図44】

【図45】
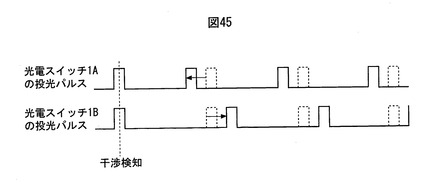
【図46】

【図47】

【図48】

【図49】
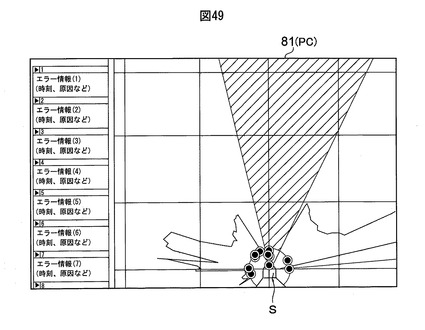
【図50】
【図51】
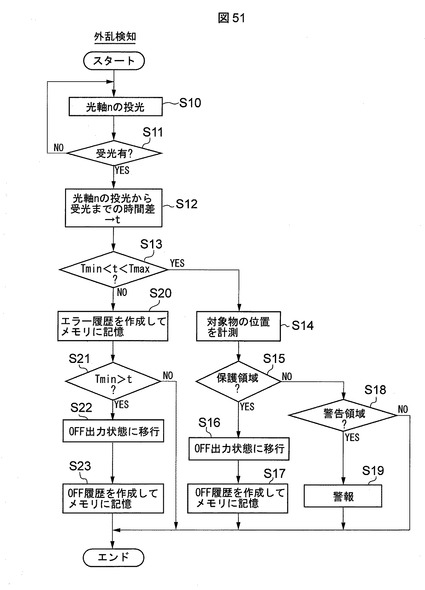
【図52】
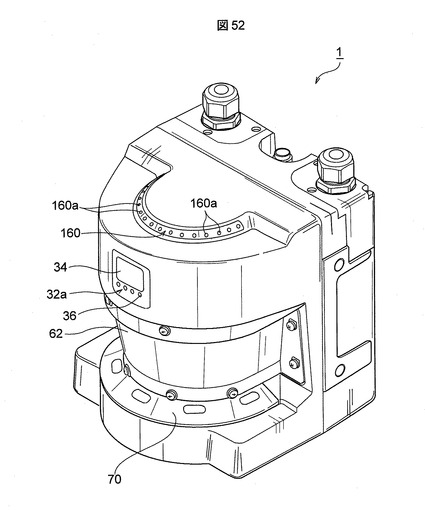
【図53】

【図54】
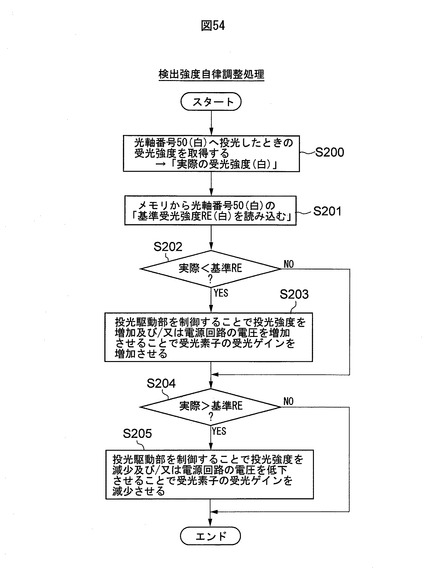
【図55】

【図56】
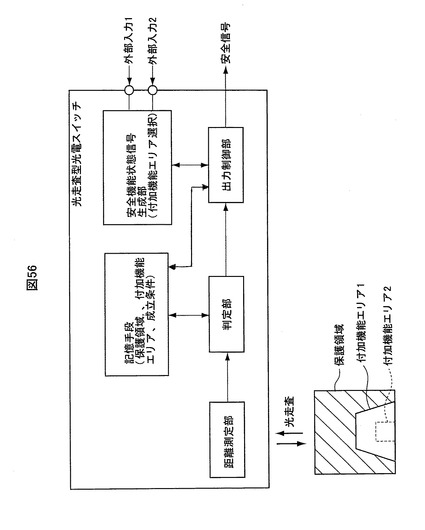
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【図32】
【図33】
【図34】
【図35】
【図36】
【図37】
【図38】
【図39】
【図40】
【図41】
【図42】
【図43】
【図44】
【図45】
【図46】
【図47】
【図48】
【図49】
【図50】
【図51】
【図52】
【図53】
【図54】
【図55】
【図56】
【公開番号】特開2010−178236(P2010−178236A)
【公開日】平成22年8月12日(2010.8.12)
【国際特許分類】
【出願番号】特願2009−21044(P2009−21044)
【出願日】平成21年1月31日(2009.1.31)
【出願人】(000129253)株式会社キーエンス (681)
【Fターム(参考)】
【公開日】平成22年8月12日(2010.8.12)
【国際特許分類】
【出願日】平成21年1月31日(2009.1.31)
【出願人】(000129253)株式会社キーエンス (681)
【Fターム(参考)】
[ Back to top ]