
安全度提示装置及びプログラム
【課題】自車両と先行車両との追突前に生じる様々な現象を考慮して、ドライバの運転を安全側へ移行させる。
【解決手段】追従状況判定部22で、車間距離センサ12及び車速センサ14の検出値に基づいて、自車両と先行車両とが追突する可能性があるか否かを判定し、追従度算出部24で、先行車両との追突の可能性があると判定された場合に、車間距離センサ12及び車速センサ14の検出値に基づいて、車間距離及び相対速度Vrを用いた追従度、車間距離及び自車両の速度Vfを用いた追従度、並びに車間距離及び先行車両の減速度Apを用いた追従度を含む複数の追従度を算出し、安全度演算部26で、算出された複数の追従度に基づいて、1つの追従安全度を演算し、表示装置18に表示する。安全度更新部28では、安全度演算部26での演算の基準を走行開始からの経過時間に応じて更新する。
【解決手段】追従状況判定部22で、車間距離センサ12及び車速センサ14の検出値に基づいて、自車両と先行車両とが追突する可能性があるか否かを判定し、追従度算出部24で、先行車両との追突の可能性があると判定された場合に、車間距離センサ12及び車速センサ14の検出値に基づいて、車間距離及び相対速度Vrを用いた追従度、車間距離及び自車両の速度Vfを用いた追従度、並びに車間距離及び先行車両の減速度Apを用いた追従度を含む複数の追従度を算出し、安全度演算部26で、算出された複数の追従度に基づいて、1つの追従安全度を演算し、表示装置18に表示する。安全度更新部28では、安全度演算部26での演算の基準を走行開始からの経過時間に応じて更新する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、安全度提示装置及びプログラムに係り、特に、先行車両に対する自車両の追従度に基づいて演算された安全度を提示する安全度提示装置及びプログラムに関する。
【背景技術】
【0002】
従来より、自車両と先行車両との追突を回避することを目的として、自車両と先行車両との追突の前に生じている現象を示す指標を算出して、この指標を用いて追突の可能性を推定し、ドライバへの警報を行ったり、車両運動を制御したりすることが行われている。
【0003】
例えば、自車両と先行車両との車間距離を自車両と先行車両との相対速度で除算した衝突時間TTC(Time To Collision)が予め定められた閾値TCCthより小さい場合、または自車両と先行車両との車間距離を自車両の速度で除算した車間時間THW(Time Head Way)が予め定められた閾値THWthより小さい場合に、先行車両との接触を回避するための制御を行う車両用接触回避制御装置が提案されている(例えば、特許文献1参照)。特許文献1に記載の発明では、自車両と先行車両との接触の前に生じている現象を示す指標として、上記の衝突時間TTC及び車間時間THWが用いられている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−10893号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の発明では、衝突時間TTCまたは車間時間THWのいずれかが予め定めた閾値より小さい場合にのみ接触回避の制御を行っており、衝突時間TTC及び車間時間THWの各々について閾値との比較を行う処理が必要である。この閾値を大きくすると制御装置が頻繁に動作してドライバの運転に対して違和感を与えることになり、また逆に閾値を小さくすると先行車両との接触または追突が確実な場合にのみ制御装置が動作することになるため、ドライバの運転を安全運転側へ移行させることができない。このように、特許文献1に記載の発明では、ドライバの運転を安全運転側へ移行させるためには、衝突時間TTC及び車間時間THWの各々について適切な閾値を設定し、各々について判定処理をしなければならず、処理が煩雑になる、という問題がある。
【0006】
また、特許文献1に記載の発明では、個々の指標について各々判定処理を行っているため、追突前に生じている様々な現象を統合的に考慮しているとはいえない、という問題がある。
【0007】
本発明は、上記の問題点を解決するためになされたもので、自車両と先行車両との追突前に生じる様々な現象を考慮して、ドライバの運転を安全側へ移行させることができる安全度提示装置及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明の安全度提示装置は、自車両の速度を検出する車速検出手段と、自車両と先行車両との間の車間距離を検出する車間距離検出手段と、前記車速検出手段で検出された速度及び前記車間距離検出手段で検出された車間距離に基づいて、前記先行車両に追従走行する前記自車両の前記先行車両との追突の可能性を示す複数の追従度を算出する追従度算出手段と、前記追従度算出手段で算出された複数の追従度の各々を複数段階で示される評価値に変換し、変換された評価値の特定値または前記評価値より求まる値が安全度として提示手段により提示されるように制御する制御手段と、を含んで構成されている。
【0009】
本発明の安全度提示装置によれば、車速検出手段で自車両の速度を検出し、車間距離検出手段で自車両と先行車両との間の車間距離を検出する。そして、追従度算出手段が、車速検出手段で検出された速度及び車間距離検出手段で検出された車間距離に基づいて、先行車両に追従走行する自車両の先行車両との追突の可能性を示す複数の追従度を算出し、制御手段が、追従度算出手段で算出された複数の追従度の各々を複数段階で示される評価値に変換し、変換された評価値の特定値または前記評価値より求まる値が安全度として提示手段により提示されるように制御する。特定値としては、評価値の最大値、中間値、最小値等を用いることができる。また、評価値の最大値より1つ小さい値や評価値の最小値より1つ大きい値を用いてもよい。評価値より求まる値としては、評価値の平均値や重み付き平均等を用いることができる。
【0010】
このように、複数の追従度を算出することにより様々な追従状況を考慮し、追従度の各々を評価値に変換することで統一の基準を用いて表し、変換された評価値から安全度を演算して提示するため、自車両と先行車両との追突前に生じる様々な現象を考慮して、ドライバの運転を安全側へ移行させることができる。
【0011】
また、前記複数の追従度は、前記車間距離及び前記自車両と前記先行車両との相対速度を用いた追従度、前記車間距離及び前記自車両の速度を用いた追従度、並びに前記車間距離及び前記先行車両の減速度を用いた追従度を含むことができる。これにより、より具体的に様々な追従状況を考慮した複数の追従度を算出することができる。
【0012】
また、前記制御手段は、前記評価値が高いほど安全度が高いことを示す場合に、前記自車両の走行開始からの経過時間に応じて、前記評価値の最大値、中間値、最小値の順に安全度として選択するようにすることができる。これにより、走行開始時には緩い基準で安全度が演算され、走行時間が経過するに従って厳しい基準で安全度が演算されるようになるため、初めから厳しい基準で演算された安全度が提示される場合より、ドライバの心理状態として判定結果を受け入れやすくなり、より適切にドライバの運転を安全側へ移行させることができる。
【0013】
また、前記車速検出手段で検出された速度及び前記車間距離検出手段で検出された車間距離に基づいて、前記自車両の速度が予め定めた速度以上の場合、前記自車両と前記先行車両との相対速度が予め定めた相対速度以上の場合、または前記自車両の速度が予め定めた速度以上で、かつ前記自車両と前記先行車両との相対速度が予め定めた相対速度以上の場合に、前記自車両と前記先行車両とが追突する可能性があると判定する判定手段を含んで構成することができ、前記追従度算出手段は、前記判定手段で前記自車両と前記先行車両とが追突する可能性があると判定された場合に、前記複数の追従度を算出するようにすることができる。信号待ちや先行車両の速度が自車両の速度よりも早い場合など、追従走行において追突の可能性が殆どないような場合には、追従度を算出しないようにして、処理の軽減を図ることができる。
【0014】
また、前記自車両のドライバを識別する識別手段を含み、前記制御手段は、前記識別手段で識別されたドライバに応じて、前記複数の追従度の各々を前記評価値に変換するようにすることができる。これにより、個人差を吸収することができる。
【0015】
また、前記制御手段は、予め定めた期間内に求めた安全度の履歴を提示するか、予め定めた期間内に求めた安全度の平均値を提示するか、または前記安全度の履歴及び前記安全度の平均値を共に提示するように制御することができる。
【0016】
また、前記制御手段は、予め定めた提示時期になったとき、前記自車両が停止している時間が予め定めた停止時間を超えたとき、または前記安全度を提示するための提示要求を受け付けたときに前記安全度が提示手段により提示されるように制御することができる。
【0017】
また、本発明の安全度提示プログラムは、コンピュータを、自車両の速度を検出する車速検出手段で検出された速度、及び自車両と先行車両との間の車間距離を検出する車間距離検出手段で検出された車間距離に基づいて、前記先行車両に追従走行する前記自車両の前記先行車両との追突の可能性を示す複数の追従度を算出する追従度算出手段、前記追従度算出手段で算出された複数の追従度の各々を複数段階で示される評価値に変換し、変換された評価値の特定値または前記評価値より求まる値が安全度として提示手段により提示されるように制御する制御手段として機能させるためのプログラムである。
【0018】
なお、本発明のプログラムを記憶する記憶媒体は、特に限定されず、ハードディスクであってもよいし、ROMであってもよい。また、CD−ROMやDVDディスク、光磁気ディスクやICカードであってもよい。更にまた、該プログラムを、ネットワークに接続されたサーバ等からダウンロードするようにしてもよい。
【発明の効果】
【0019】
以上説明したように、本発明の安全度提示装置及びプログラムによれば、複数の追従度を算出することにより様々な追従状況を考慮し、追従度の各々を評価値に変換することで統一の基準を用いて表し、変換された評価値から安全度を演算して提示することにより、自車両と先行車両との追突前に生じる様々な現象を考慮して、ドライバの運転を安全側へ移行させることができる、という効果が得られる。
【図面の簡単な説明】
【0020】
【図1】本実施の形態の安全度提示装置の概略構成を示すブロック図である。
【図2】追従特徴量の評価値への変換の一例を示す図である。
【図3】追従安全度の選択基準の更新を説明するための図である。
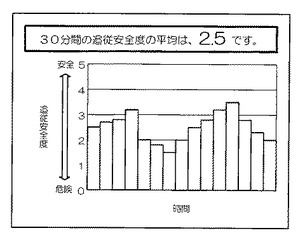
【図4】追従安全度の提示の一例を示すイメージ図である。
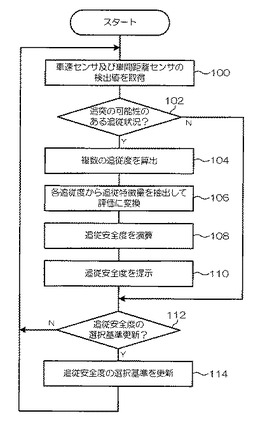
【図5】本実施の形態の安全度提示装置における安全度提示処理ルーチンの内容を示すフローチャートである。
【発明を実施するための形態】
【0021】
以下、図面を参照して本発明の実施の形態を詳細に説明する。
【0022】
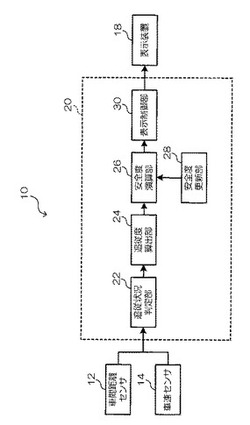
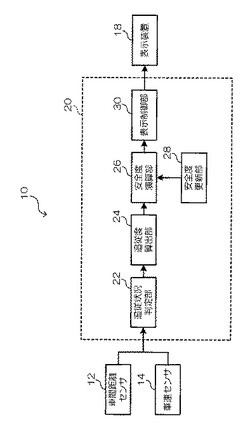
図1に示すように、本実施の形態に係る安全度提示装置10は、自車両と先行車両との間の車間距離を検出する車間距離センサ12と、自車両の速度を検出する車速センサ14と、車間距離センサ12及び車速センサ14の検出値に基づいて、先行車両に対する自車両の追従度に応じた追従安全度を演算して、演算した追従安全度を表示装置18に表示する制御を行うコンピュータ20と、を備えている。
【0023】
車間距離センサ12は、車間距離として自車両と先行車両との相対距離を検出すると共に、相対距離の微分値を自車両と先行車両との相対速度として検出してコンピュータ20に出力する。車間距離センサ12としては、例えば、レーザレーダやミリ波レーダ等を用いることができる。
【0024】
コンピュータ20は、安全度提示装置10全体の制御を司るCPU、後述する安全度提示処理ルーチンのプログラム等を記憶した記憶媒体としてのROM、ワークエリアとしてデータを一時格納するRAM、及びこれらを接続するバスを含んで構成されている。
【0025】
このコンピュータ20をハードウエアとソフトウエアとに基づいて定まる機能実現手段毎に分割した機能ブロックで説明すると、図1に示すように、車間距離センサ12及び車速センサ14の検出値に基づいて、自車両と先行車両とが追突する可能性があるか否かを判定する追従状況判定部22と、追従状況判定部22で先行車両との追突の可能性があると判定された場合に、車間距離センサ12及び車速センサ14の検出値に基づいて、複数の追従度を算出する追従度算出部24と、追従度算出部24で算出された複数の追従度に基づいて、1つの追従安全度を演算する安全度演算部26と、安全度演算部26での演算の基準を更新する安全度更新部28と、安全度演算部26での演算結果が表示装置18に表示されるように制御する表示制御部30と、を含んだ構成で表すことができる。なお、安全度演算部26、安全度更新部28、及び表示制御部30が、本発明の制御手段の一例である。
【0026】
追従状況判定部22は、自車両と先行車両とが追突する可能性がある場合にのみ、後述の処理を実行するために、自車両と先行車両とが追突する可能性があるか否かを判定する。例えば、交差点などで信号待ちをしているときや、先行車両の速度が自車両の速度よりも大きい場合には、追従時の追突の危険性はかなり低くなる。そこで、車速センサ14で検出された自車両の速度Vfが予め定めた速度Vf0(例えば、5km/h程度の低速)以上の場合、かつ車間距離センサ12で検出された相対速度Vrが予め定めた相対速度Vr0(例えば、2km/h程度の低速)以上の場合に、追突の可能性のある追従状況であると判定する。なお、ここでは、自車両の速度Vf及び相対速度Vrの両方を用いて追従状況を判定する場合について説明するが、自車両の速度Vf及び相対速度Vrのいずれか一方のみで判定してもよい。
【0027】
追従度算出部24は、車間距離センサ12及び車速センサ14の検出値に基づいて、複数の追従度を算出する。ここで、自車両と先行車両との追突の前に生じている現象について説明すると、少なくとも以下の(1)〜(3)の場合が考えられる。
【0028】
(1)先行車両との衝突余裕時間(例えば、衝突時間TTC)が徐々に小さくなる。例えば、先行車両の速度が小さいのに、これより高い速度で自車両が先行車両に接近する状況である。
【0029】
(2)先行車両との衝突余裕時間は小さくないが、車間距離が小さく、先行車両のわずかな速度低下で追突の危険性が高まる。例えば、車間時間THWが小さい走行状況である。
【0030】
(3)衝突時間TTCや車間時間THWは小さくないが、先行車両の減速度などの走行挙動の変化によって追突の可能性が高まる。
【0031】
従って、自車両と先行車両との車間距離に加えて、少なくとも(1)自車両と先行車両との相対速度Vr、(2)自車両の速度Vf、及び(3)先行車両の減速度(加速度)Apを考慮した追従度を算出することで、様々な追従状況に対応することができる。(1)の相対速度Vrは車間距離センサ12の検出値を用いることができ、(2)の自車両の速度Vfは車速センサ14の検出値を用いることができる。(3)の先行車両の減速度Apは、相対速度Vrから自車両の速度Vfを減算して先行車両の速度Vpを求め、これを微分することで求めることができる。
【0032】
(1)に対応する追従度としては、上記の衝突時間TTCや、1/TTC(TTCの逆数)、KdB(接近離間状態指標)等を用いることができる。また、(2)に対応する追従度としては、上記の衝突時間TTCやRF(Risk Feeling)等を用いることができる。(3)に対応する追従度としては、相対速度Vr、自車両の速度Vf、及び先行車両の減速度Apの各々に所定の係数を乗算した値の和を車間距離に所定の係数を乗算した値で除算した指標γ等を用いることができる。なお、例えばKdBやRFは(1)にも(2)にも対応している等、各追従度は厳密に(1)〜(3)に分類することができない場合もあるが、(1)〜(3)に対応して各々異なる追従度を用いればよい。例えば、(1)TTC、(2)KdB、(3)γとしてもよいし、(1)KdB、(2)RF、(3)γとしてもよい。また、上記に記載した指標以外にも、公知の追突を推定するための指標を用いてもよい。
【0033】
安全度演算部26は、追従度算出部24で算出された追従度の各々から、追従特徴量を抽出する。追従特徴量は、予め定めた時間間隔(例えば、5秒間隔)に含まれる追従度から抽出された値とする。例えば、追従度として衝突時間TTCを用いている場合には、TTCが小さい場合に追突の危険性が高いため、5秒間で算出され追従度の最小値をその5秒間における追従特徴量とし、RFやKdBについては、その値が大きい場合に追突の危険性が高いため、5秒間で算出され追従度の最大値をその5秒間における追従特徴量とすることができる。
【0034】
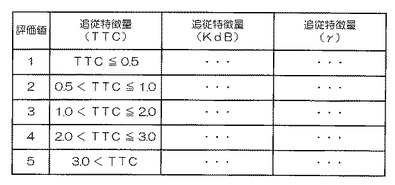
そして、抽出された追従特徴量を複数段階で示される評価値に変換する。例えば、追従度としてTTCを用い、5段階で示される評価値に変換する場合には、図2に示すように、TTCが0.5以下の場合には評価値を「1」とし、TTCが0.5を超え1.0以下の場合には評価値を「2」とし、TTCが1.0を超え2.0以下の場合には評価値を「3」とし、TTCが2.0を超え3.0以下の場合には評価値を「4」とし、TTCが3.0を超える場合には評価値を「5」とすることができる。TTCと共に他の追従度としてKdBやγを用いた場合には、追従特徴量が大きいほど評価値が小さくなるように、TTCの場合と同様に追従特徴量を評価値1〜5に変換する。図2の例の場合、評価値5が最も追従安全度が高く、評価値1が最も追従安全度が低い。このように、追従特徴量の各々を評価値に変換することで、統一した基準で追従度の高低を判断することができる。
【0035】
また、追従特徴量を評価値に変換する範囲の設定をドライバ毎に変更してもよい。具体的には、ドライバの顔を車内に設けたカメラで撮影して顔認識処理を行ったり、ドライバにより入力された識別情報を受け付けたりしてドライバを識別し、識別されたドライバの過去の運転履歴に応じて、追従特徴量を評価値に変換する範囲を設定する。例えば、普段から広い車間距離で追従走行するドライバであれば、TTCが4.0を超える場合を評価値「5」としたり、逆に、普段から狭い車間距離で追従走行するドライバであれば、TTCが2.0を超える場合を評価値「5」としたりすることができる。
【0036】
また、安全度演算部26は、追従特徴量の各々から変換された評価値の特定値を追従安全度として選択するか、または評価値より求まる値を追従安全度として演算する。ここでは、評価値の最大値、中間値、または最小値を追従安全度として選択する場合について説明する。なお、特定値としては、評価値の最大値、中間値、及び最小値の他に、評価値の最大値より1つ小さい値や評価値の最小値より1つ大きい値を用いてもよい。また、評価値の平均値や重み付き平均等を用いてもよい。
【0037】
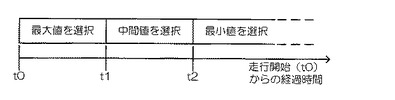
安全度更新部28は、安全度演算部26でどの評価値を追従安全度として選択するかの基準を更新する。例えば、追従状況によっては、TTCを用いた追従特徴量から変換された評価値が「1」であったとしても、RFやKdBを用いた追従特徴量から変化された評価値が必ずしも「1」であるとは限らない。すなわち、複数の評価値のいずれを追従安全度として選択するかによって、追従安全度のレベルが異なる。例えば、評価値の最小値を追従安全度として選択した場合には、同じ追従走行を行っていたとしても追従安全度は低く設定され、評価値の最大値を追従安全度として選択した場合には、追従安全度は高く設定される。そこで、安全度更新部28では、例えば、図3に示すように、安全度演算部26で、走行開始の初期の期間(t0〜t1)では評価値の最大値が追従安全度として選択され、走行開始からの経過時間に応じて、t1〜t2では中間値が選択され、t2を超えたら最小値が選択されるように、選択の基準を更新する。
【0038】
表示制御部30は、安全度演算部26で演算された追従安全度を表示装置18に表示するように制御する。追従安全度が演算される都度表示するようにしてもよいし、演算された追従安全度を一旦所定の記憶領域に記憶しておき、追従安全度の履歴や平均値等を表示するようにしてもよい。例えば、図4に示すように、30分間に演算された追従安全度の2分毎の平均値を棒グラフで示し、30分間の平均値をメッセージとして表示することができる。
【0039】
また、演算された追従安全度は、常に表示装置18に表示されるようにしてもよいし、予め定めた時間毎(例えば30分毎)に所定時間(例えば1分)表示するようにしてもよいし、車速センサ14の検出値に基づいて、自車両が停止している時間が予め定めた停止時間を超えたタイミングで所定時間表示するようにしてもよいし、ドライバの表示要求に応じて表示するようにしてもよい。
【0040】
次に、図5を参照して、コンピュータ20で実行される安全度提示処理ルーチンについて説明する。
【0041】
ステップ100で、車間距離センサ12で検出された車間距離及び自車両と先行車両との相対速度Vr、並びに車速センサ14で検出された自車両の速度Vfを取得する。
【0042】
次に、ステップ102で、上記ステップ100で取得した自車両の速度Vfが予め定めた速度Vf0(例えば、5km/h程度の低速)以上で、かつ上記ステップ100で取得した相対速度Vrが予め定めた相対速度Vr0(例えば、2km/h程度の低速)以上か否かを判定することにより、自車両と先行車両とが追突する可能性のある追従状況であるか否かを判定する。追突する可能性がある場合には、ステップ104へ移行し、追突する可能性がない場合には、ステップ112へ移行する。
【0043】
ステップ104では、上記ステップ100で取得した車間距離、相対速度Vr、及び自車両の速度Vfに基づいて、複数の追従度を算出する。複数の追従度は、例えば、TTC、KdB、及びγ等のように、上述の(1)〜(3)の現象を考慮した異なる複数の追従度を算出する。なお、追従度の算出に先行車両の速度Vp及び先行車両の加速度Apが必要な場合には、上記ステップ100で取得した相対速度Vr、及び自車両の速度Vfを用い、「先行車両の速度Vp=相対速度Vr−自車両の速度Vf」として先行車両の速度Vpを求め、これを微分することで先行車両の加速度Apを求めることができる。
【0044】
次に、ステップ106で、上記ステップ104で算出した追従度の各々から、予め定めた時間間隔(例えば、5秒間隔)に含まれる追従度の最大値や最小値等の追従特徴量を抽出する。そして、抽出した追従特徴量を、例えば図2に示すように、複数段階で示される評価値に変換する。
【0045】
次に、ステップ108で、例えば、図3に示すような走行開始からの経過時間に従った追従安全度の選択基準に基づいて、上記ステップ106で変換した追従度毎の評価値から1つの評価値を選択することにより、追従安全度を演算する。次に、ステップ110で、上記ステップ108で演算した追従安全度を表示装置18に表示する。なお、表示のタイミングを、予め定めた時間毎、自車両が停止している時間が予め定めた停止時間を超えたタイミング、またはドライバの表示要求に応じたタイミングとする場合には、演算された追従安全度を記憶しておき、設定されたタイミングで表示するようにする。
【0046】
次に、ステップ112では、追従安全度の選択基準の更新時期になったか否かを判定する。図3に示す選択基準の例の場合には、走行開始からの経過時間がt1またはt2になったときが更新時期となる。追従安全度の選択基準の更新時期になった場合には、ステップ114へ移行して、上記ステップ108において、追従安全度として選択される評価値の基準を更新して、ステップ100へ戻る。一方、更新時期ではない場合には、そのままステップ100へ戻る。
【0047】
以上説明したように、本実施の形態の安全度提示装置によれば、様々な追従状況を考慮した複数の追従度を算出し、この追従度の各々を評価値に変換することで統一の基準を用いて表し、変換された評価値の中から安全度のレベルに応じた値を追従安全度として選択して提示するため、自車両と先行車両との追突前に生じる様々な現象を考慮して、ドライバの運転を安全側へ移行させることができる。
【0048】
また、走行開始時には、緩い基準で追従安全度が演算されるようにし、走行時間が経過するに従って厳しい基準で追従安全度が演算されるようにすることで、ドライバの運転を徐々に安全運転側に移行させることができる。また、緩い基準から厳しい基準へ徐々に変化させることで、初めから厳しい基準で演算された追従安全度が提示される場合より、ドライバの心理状態として判定結果を受け入れやすくなり、より適切にドライバの運転を安全運転側に移行させることができる。
【0049】
なお、上記実施の形態では、追従度として少なくとも3つを算出する場合について説明したが、4つ以上の追従度を算出してもよい。また、例えば、上述の追突の前に生じている現象(1)〜(3)の(1)にも(2)にも対応しているようなKdBやRFを用いれば、算出する追従度は2つであってもよい。
【0050】
また、上記実施の形態では、追従安全度を表示装置に表示することによりドライバに提示する場合について説明したが、スピーカから音声により提示するようにしてもよい。
【0051】
また、上記の実施の形態では、追従特徴量を5段階の評価値に変換する場合について説明したが、これに限定されるものではなく、5段階以下であってもよいし、5段階以上であってもよい。また、追従度の各々を統一の基準の評価値に変換できればよいため、変換式を用いて変換してもよい。さらに、上記実施の形態では、追従度から追従特徴量を抽出して評価値に変換する場合について説明したが、算出した追従度をそのまま評価値に変換してもよい。
【符号の説明】
【0052】
10 安全度提示装置
12 車間距離センサ
14 車速センサ
18 表示装置
20 コンピュータ
22 追従状況判定部
24 追従度算出部
26 安全度演算部
28 安全度更新部
30 表示制御部
【技術分野】
【0001】
本発明は、安全度提示装置及びプログラムに係り、特に、先行車両に対する自車両の追従度に基づいて演算された安全度を提示する安全度提示装置及びプログラムに関する。
【背景技術】
【0002】
従来より、自車両と先行車両との追突を回避することを目的として、自車両と先行車両との追突の前に生じている現象を示す指標を算出して、この指標を用いて追突の可能性を推定し、ドライバへの警報を行ったり、車両運動を制御したりすることが行われている。
【0003】
例えば、自車両と先行車両との車間距離を自車両と先行車両との相対速度で除算した衝突時間TTC(Time To Collision)が予め定められた閾値TCCthより小さい場合、または自車両と先行車両との車間距離を自車両の速度で除算した車間時間THW(Time Head Way)が予め定められた閾値THWthより小さい場合に、先行車両との接触を回避するための制御を行う車両用接触回避制御装置が提案されている(例えば、特許文献1参照)。特許文献1に記載の発明では、自車両と先行車両との接触の前に生じている現象を示す指標として、上記の衝突時間TTC及び車間時間THWが用いられている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−10893号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の発明では、衝突時間TTCまたは車間時間THWのいずれかが予め定めた閾値より小さい場合にのみ接触回避の制御を行っており、衝突時間TTC及び車間時間THWの各々について閾値との比較を行う処理が必要である。この閾値を大きくすると制御装置が頻繁に動作してドライバの運転に対して違和感を与えることになり、また逆に閾値を小さくすると先行車両との接触または追突が確実な場合にのみ制御装置が動作することになるため、ドライバの運転を安全運転側へ移行させることができない。このように、特許文献1に記載の発明では、ドライバの運転を安全運転側へ移行させるためには、衝突時間TTC及び車間時間THWの各々について適切な閾値を設定し、各々について判定処理をしなければならず、処理が煩雑になる、という問題がある。
【0006】
また、特許文献1に記載の発明では、個々の指標について各々判定処理を行っているため、追突前に生じている様々な現象を統合的に考慮しているとはいえない、という問題がある。
【0007】
本発明は、上記の問題点を解決するためになされたもので、自車両と先行車両との追突前に生じる様々な現象を考慮して、ドライバの運転を安全側へ移行させることができる安全度提示装置及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、本発明の安全度提示装置は、自車両の速度を検出する車速検出手段と、自車両と先行車両との間の車間距離を検出する車間距離検出手段と、前記車速検出手段で検出された速度及び前記車間距離検出手段で検出された車間距離に基づいて、前記先行車両に追従走行する前記自車両の前記先行車両との追突の可能性を示す複数の追従度を算出する追従度算出手段と、前記追従度算出手段で算出された複数の追従度の各々を複数段階で示される評価値に変換し、変換された評価値の特定値または前記評価値より求まる値が安全度として提示手段により提示されるように制御する制御手段と、を含んで構成されている。
【0009】
本発明の安全度提示装置によれば、車速検出手段で自車両の速度を検出し、車間距離検出手段で自車両と先行車両との間の車間距離を検出する。そして、追従度算出手段が、車速検出手段で検出された速度及び車間距離検出手段で検出された車間距離に基づいて、先行車両に追従走行する自車両の先行車両との追突の可能性を示す複数の追従度を算出し、制御手段が、追従度算出手段で算出された複数の追従度の各々を複数段階で示される評価値に変換し、変換された評価値の特定値または前記評価値より求まる値が安全度として提示手段により提示されるように制御する。特定値としては、評価値の最大値、中間値、最小値等を用いることができる。また、評価値の最大値より1つ小さい値や評価値の最小値より1つ大きい値を用いてもよい。評価値より求まる値としては、評価値の平均値や重み付き平均等を用いることができる。
【0010】
このように、複数の追従度を算出することにより様々な追従状況を考慮し、追従度の各々を評価値に変換することで統一の基準を用いて表し、変換された評価値から安全度を演算して提示するため、自車両と先行車両との追突前に生じる様々な現象を考慮して、ドライバの運転を安全側へ移行させることができる。
【0011】
また、前記複数の追従度は、前記車間距離及び前記自車両と前記先行車両との相対速度を用いた追従度、前記車間距離及び前記自車両の速度を用いた追従度、並びに前記車間距離及び前記先行車両の減速度を用いた追従度を含むことができる。これにより、より具体的に様々な追従状況を考慮した複数の追従度を算出することができる。
【0012】
また、前記制御手段は、前記評価値が高いほど安全度が高いことを示す場合に、前記自車両の走行開始からの経過時間に応じて、前記評価値の最大値、中間値、最小値の順に安全度として選択するようにすることができる。これにより、走行開始時には緩い基準で安全度が演算され、走行時間が経過するに従って厳しい基準で安全度が演算されるようになるため、初めから厳しい基準で演算された安全度が提示される場合より、ドライバの心理状態として判定結果を受け入れやすくなり、より適切にドライバの運転を安全側へ移行させることができる。
【0013】
また、前記車速検出手段で検出された速度及び前記車間距離検出手段で検出された車間距離に基づいて、前記自車両の速度が予め定めた速度以上の場合、前記自車両と前記先行車両との相対速度が予め定めた相対速度以上の場合、または前記自車両の速度が予め定めた速度以上で、かつ前記自車両と前記先行車両との相対速度が予め定めた相対速度以上の場合に、前記自車両と前記先行車両とが追突する可能性があると判定する判定手段を含んで構成することができ、前記追従度算出手段は、前記判定手段で前記自車両と前記先行車両とが追突する可能性があると判定された場合に、前記複数の追従度を算出するようにすることができる。信号待ちや先行車両の速度が自車両の速度よりも早い場合など、追従走行において追突の可能性が殆どないような場合には、追従度を算出しないようにして、処理の軽減を図ることができる。
【0014】
また、前記自車両のドライバを識別する識別手段を含み、前記制御手段は、前記識別手段で識別されたドライバに応じて、前記複数の追従度の各々を前記評価値に変換するようにすることができる。これにより、個人差を吸収することができる。
【0015】
また、前記制御手段は、予め定めた期間内に求めた安全度の履歴を提示するか、予め定めた期間内に求めた安全度の平均値を提示するか、または前記安全度の履歴及び前記安全度の平均値を共に提示するように制御することができる。
【0016】
また、前記制御手段は、予め定めた提示時期になったとき、前記自車両が停止している時間が予め定めた停止時間を超えたとき、または前記安全度を提示するための提示要求を受け付けたときに前記安全度が提示手段により提示されるように制御することができる。
【0017】
また、本発明の安全度提示プログラムは、コンピュータを、自車両の速度を検出する車速検出手段で検出された速度、及び自車両と先行車両との間の車間距離を検出する車間距離検出手段で検出された車間距離に基づいて、前記先行車両に追従走行する前記自車両の前記先行車両との追突の可能性を示す複数の追従度を算出する追従度算出手段、前記追従度算出手段で算出された複数の追従度の各々を複数段階で示される評価値に変換し、変換された評価値の特定値または前記評価値より求まる値が安全度として提示手段により提示されるように制御する制御手段として機能させるためのプログラムである。
【0018】
なお、本発明のプログラムを記憶する記憶媒体は、特に限定されず、ハードディスクであってもよいし、ROMであってもよい。また、CD−ROMやDVDディスク、光磁気ディスクやICカードであってもよい。更にまた、該プログラムを、ネットワークに接続されたサーバ等からダウンロードするようにしてもよい。
【発明の効果】
【0019】
以上説明したように、本発明の安全度提示装置及びプログラムによれば、複数の追従度を算出することにより様々な追従状況を考慮し、追従度の各々を評価値に変換することで統一の基準を用いて表し、変換された評価値から安全度を演算して提示することにより、自車両と先行車両との追突前に生じる様々な現象を考慮して、ドライバの運転を安全側へ移行させることができる、という効果が得られる。
【図面の簡単な説明】
【0020】
【図1】本実施の形態の安全度提示装置の概略構成を示すブロック図である。
【図2】追従特徴量の評価値への変換の一例を示す図である。
【図3】追従安全度の選択基準の更新を説明するための図である。
【図4】追従安全度の提示の一例を示すイメージ図である。
【図5】本実施の形態の安全度提示装置における安全度提示処理ルーチンの内容を示すフローチャートである。
【発明を実施するための形態】
【0021】
以下、図面を参照して本発明の実施の形態を詳細に説明する。
【0022】
図1に示すように、本実施の形態に係る安全度提示装置10は、自車両と先行車両との間の車間距離を検出する車間距離センサ12と、自車両の速度を検出する車速センサ14と、車間距離センサ12及び車速センサ14の検出値に基づいて、先行車両に対する自車両の追従度に応じた追従安全度を演算して、演算した追従安全度を表示装置18に表示する制御を行うコンピュータ20と、を備えている。
【0023】
車間距離センサ12は、車間距離として自車両と先行車両との相対距離を検出すると共に、相対距離の微分値を自車両と先行車両との相対速度として検出してコンピュータ20に出力する。車間距離センサ12としては、例えば、レーザレーダやミリ波レーダ等を用いることができる。
【0024】
コンピュータ20は、安全度提示装置10全体の制御を司るCPU、後述する安全度提示処理ルーチンのプログラム等を記憶した記憶媒体としてのROM、ワークエリアとしてデータを一時格納するRAM、及びこれらを接続するバスを含んで構成されている。
【0025】
このコンピュータ20をハードウエアとソフトウエアとに基づいて定まる機能実現手段毎に分割した機能ブロックで説明すると、図1に示すように、車間距離センサ12及び車速センサ14の検出値に基づいて、自車両と先行車両とが追突する可能性があるか否かを判定する追従状況判定部22と、追従状況判定部22で先行車両との追突の可能性があると判定された場合に、車間距離センサ12及び車速センサ14の検出値に基づいて、複数の追従度を算出する追従度算出部24と、追従度算出部24で算出された複数の追従度に基づいて、1つの追従安全度を演算する安全度演算部26と、安全度演算部26での演算の基準を更新する安全度更新部28と、安全度演算部26での演算結果が表示装置18に表示されるように制御する表示制御部30と、を含んだ構成で表すことができる。なお、安全度演算部26、安全度更新部28、及び表示制御部30が、本発明の制御手段の一例である。
【0026】
追従状況判定部22は、自車両と先行車両とが追突する可能性がある場合にのみ、後述の処理を実行するために、自車両と先行車両とが追突する可能性があるか否かを判定する。例えば、交差点などで信号待ちをしているときや、先行車両の速度が自車両の速度よりも大きい場合には、追従時の追突の危険性はかなり低くなる。そこで、車速センサ14で検出された自車両の速度Vfが予め定めた速度Vf0(例えば、5km/h程度の低速)以上の場合、かつ車間距離センサ12で検出された相対速度Vrが予め定めた相対速度Vr0(例えば、2km/h程度の低速)以上の場合に、追突の可能性のある追従状況であると判定する。なお、ここでは、自車両の速度Vf及び相対速度Vrの両方を用いて追従状況を判定する場合について説明するが、自車両の速度Vf及び相対速度Vrのいずれか一方のみで判定してもよい。
【0027】
追従度算出部24は、車間距離センサ12及び車速センサ14の検出値に基づいて、複数の追従度を算出する。ここで、自車両と先行車両との追突の前に生じている現象について説明すると、少なくとも以下の(1)〜(3)の場合が考えられる。
【0028】
(1)先行車両との衝突余裕時間(例えば、衝突時間TTC)が徐々に小さくなる。例えば、先行車両の速度が小さいのに、これより高い速度で自車両が先行車両に接近する状況である。
【0029】
(2)先行車両との衝突余裕時間は小さくないが、車間距離が小さく、先行車両のわずかな速度低下で追突の危険性が高まる。例えば、車間時間THWが小さい走行状況である。
【0030】
(3)衝突時間TTCや車間時間THWは小さくないが、先行車両の減速度などの走行挙動の変化によって追突の可能性が高まる。
【0031】
従って、自車両と先行車両との車間距離に加えて、少なくとも(1)自車両と先行車両との相対速度Vr、(2)自車両の速度Vf、及び(3)先行車両の減速度(加速度)Apを考慮した追従度を算出することで、様々な追従状況に対応することができる。(1)の相対速度Vrは車間距離センサ12の検出値を用いることができ、(2)の自車両の速度Vfは車速センサ14の検出値を用いることができる。(3)の先行車両の減速度Apは、相対速度Vrから自車両の速度Vfを減算して先行車両の速度Vpを求め、これを微分することで求めることができる。
【0032】
(1)に対応する追従度としては、上記の衝突時間TTCや、1/TTC(TTCの逆数)、KdB(接近離間状態指標)等を用いることができる。また、(2)に対応する追従度としては、上記の衝突時間TTCやRF(Risk Feeling)等を用いることができる。(3)に対応する追従度としては、相対速度Vr、自車両の速度Vf、及び先行車両の減速度Apの各々に所定の係数を乗算した値の和を車間距離に所定の係数を乗算した値で除算した指標γ等を用いることができる。なお、例えばKdBやRFは(1)にも(2)にも対応している等、各追従度は厳密に(1)〜(3)に分類することができない場合もあるが、(1)〜(3)に対応して各々異なる追従度を用いればよい。例えば、(1)TTC、(2)KdB、(3)γとしてもよいし、(1)KdB、(2)RF、(3)γとしてもよい。また、上記に記載した指標以外にも、公知の追突を推定するための指標を用いてもよい。
【0033】
安全度演算部26は、追従度算出部24で算出された追従度の各々から、追従特徴量を抽出する。追従特徴量は、予め定めた時間間隔(例えば、5秒間隔)に含まれる追従度から抽出された値とする。例えば、追従度として衝突時間TTCを用いている場合には、TTCが小さい場合に追突の危険性が高いため、5秒間で算出され追従度の最小値をその5秒間における追従特徴量とし、RFやKdBについては、その値が大きい場合に追突の危険性が高いため、5秒間で算出され追従度の最大値をその5秒間における追従特徴量とすることができる。
【0034】
そして、抽出された追従特徴量を複数段階で示される評価値に変換する。例えば、追従度としてTTCを用い、5段階で示される評価値に変換する場合には、図2に示すように、TTCが0.5以下の場合には評価値を「1」とし、TTCが0.5を超え1.0以下の場合には評価値を「2」とし、TTCが1.0を超え2.0以下の場合には評価値を「3」とし、TTCが2.0を超え3.0以下の場合には評価値を「4」とし、TTCが3.0を超える場合には評価値を「5」とすることができる。TTCと共に他の追従度としてKdBやγを用いた場合には、追従特徴量が大きいほど評価値が小さくなるように、TTCの場合と同様に追従特徴量を評価値1〜5に変換する。図2の例の場合、評価値5が最も追従安全度が高く、評価値1が最も追従安全度が低い。このように、追従特徴量の各々を評価値に変換することで、統一した基準で追従度の高低を判断することができる。
【0035】
また、追従特徴量を評価値に変換する範囲の設定をドライバ毎に変更してもよい。具体的には、ドライバの顔を車内に設けたカメラで撮影して顔認識処理を行ったり、ドライバにより入力された識別情報を受け付けたりしてドライバを識別し、識別されたドライバの過去の運転履歴に応じて、追従特徴量を評価値に変換する範囲を設定する。例えば、普段から広い車間距離で追従走行するドライバであれば、TTCが4.0を超える場合を評価値「5」としたり、逆に、普段から狭い車間距離で追従走行するドライバであれば、TTCが2.0を超える場合を評価値「5」としたりすることができる。
【0036】
また、安全度演算部26は、追従特徴量の各々から変換された評価値の特定値を追従安全度として選択するか、または評価値より求まる値を追従安全度として演算する。ここでは、評価値の最大値、中間値、または最小値を追従安全度として選択する場合について説明する。なお、特定値としては、評価値の最大値、中間値、及び最小値の他に、評価値の最大値より1つ小さい値や評価値の最小値より1つ大きい値を用いてもよい。また、評価値の平均値や重み付き平均等を用いてもよい。
【0037】
安全度更新部28は、安全度演算部26でどの評価値を追従安全度として選択するかの基準を更新する。例えば、追従状況によっては、TTCを用いた追従特徴量から変換された評価値が「1」であったとしても、RFやKdBを用いた追従特徴量から変化された評価値が必ずしも「1」であるとは限らない。すなわち、複数の評価値のいずれを追従安全度として選択するかによって、追従安全度のレベルが異なる。例えば、評価値の最小値を追従安全度として選択した場合には、同じ追従走行を行っていたとしても追従安全度は低く設定され、評価値の最大値を追従安全度として選択した場合には、追従安全度は高く設定される。そこで、安全度更新部28では、例えば、図3に示すように、安全度演算部26で、走行開始の初期の期間(t0〜t1)では評価値の最大値が追従安全度として選択され、走行開始からの経過時間に応じて、t1〜t2では中間値が選択され、t2を超えたら最小値が選択されるように、選択の基準を更新する。
【0038】
表示制御部30は、安全度演算部26で演算された追従安全度を表示装置18に表示するように制御する。追従安全度が演算される都度表示するようにしてもよいし、演算された追従安全度を一旦所定の記憶領域に記憶しておき、追従安全度の履歴や平均値等を表示するようにしてもよい。例えば、図4に示すように、30分間に演算された追従安全度の2分毎の平均値を棒グラフで示し、30分間の平均値をメッセージとして表示することができる。
【0039】
また、演算された追従安全度は、常に表示装置18に表示されるようにしてもよいし、予め定めた時間毎(例えば30分毎)に所定時間(例えば1分)表示するようにしてもよいし、車速センサ14の検出値に基づいて、自車両が停止している時間が予め定めた停止時間を超えたタイミングで所定時間表示するようにしてもよいし、ドライバの表示要求に応じて表示するようにしてもよい。
【0040】
次に、図5を参照して、コンピュータ20で実行される安全度提示処理ルーチンについて説明する。
【0041】
ステップ100で、車間距離センサ12で検出された車間距離及び自車両と先行車両との相対速度Vr、並びに車速センサ14で検出された自車両の速度Vfを取得する。
【0042】
次に、ステップ102で、上記ステップ100で取得した自車両の速度Vfが予め定めた速度Vf0(例えば、5km/h程度の低速)以上で、かつ上記ステップ100で取得した相対速度Vrが予め定めた相対速度Vr0(例えば、2km/h程度の低速)以上か否かを判定することにより、自車両と先行車両とが追突する可能性のある追従状況であるか否かを判定する。追突する可能性がある場合には、ステップ104へ移行し、追突する可能性がない場合には、ステップ112へ移行する。
【0043】
ステップ104では、上記ステップ100で取得した車間距離、相対速度Vr、及び自車両の速度Vfに基づいて、複数の追従度を算出する。複数の追従度は、例えば、TTC、KdB、及びγ等のように、上述の(1)〜(3)の現象を考慮した異なる複数の追従度を算出する。なお、追従度の算出に先行車両の速度Vp及び先行車両の加速度Apが必要な場合には、上記ステップ100で取得した相対速度Vr、及び自車両の速度Vfを用い、「先行車両の速度Vp=相対速度Vr−自車両の速度Vf」として先行車両の速度Vpを求め、これを微分することで先行車両の加速度Apを求めることができる。
【0044】
次に、ステップ106で、上記ステップ104で算出した追従度の各々から、予め定めた時間間隔(例えば、5秒間隔)に含まれる追従度の最大値や最小値等の追従特徴量を抽出する。そして、抽出した追従特徴量を、例えば図2に示すように、複数段階で示される評価値に変換する。
【0045】
次に、ステップ108で、例えば、図3に示すような走行開始からの経過時間に従った追従安全度の選択基準に基づいて、上記ステップ106で変換した追従度毎の評価値から1つの評価値を選択することにより、追従安全度を演算する。次に、ステップ110で、上記ステップ108で演算した追従安全度を表示装置18に表示する。なお、表示のタイミングを、予め定めた時間毎、自車両が停止している時間が予め定めた停止時間を超えたタイミング、またはドライバの表示要求に応じたタイミングとする場合には、演算された追従安全度を記憶しておき、設定されたタイミングで表示するようにする。
【0046】
次に、ステップ112では、追従安全度の選択基準の更新時期になったか否かを判定する。図3に示す選択基準の例の場合には、走行開始からの経過時間がt1またはt2になったときが更新時期となる。追従安全度の選択基準の更新時期になった場合には、ステップ114へ移行して、上記ステップ108において、追従安全度として選択される評価値の基準を更新して、ステップ100へ戻る。一方、更新時期ではない場合には、そのままステップ100へ戻る。
【0047】
以上説明したように、本実施の形態の安全度提示装置によれば、様々な追従状況を考慮した複数の追従度を算出し、この追従度の各々を評価値に変換することで統一の基準を用いて表し、変換された評価値の中から安全度のレベルに応じた値を追従安全度として選択して提示するため、自車両と先行車両との追突前に生じる様々な現象を考慮して、ドライバの運転を安全側へ移行させることができる。
【0048】
また、走行開始時には、緩い基準で追従安全度が演算されるようにし、走行時間が経過するに従って厳しい基準で追従安全度が演算されるようにすることで、ドライバの運転を徐々に安全運転側に移行させることができる。また、緩い基準から厳しい基準へ徐々に変化させることで、初めから厳しい基準で演算された追従安全度が提示される場合より、ドライバの心理状態として判定結果を受け入れやすくなり、より適切にドライバの運転を安全運転側に移行させることができる。
【0049】
なお、上記実施の形態では、追従度として少なくとも3つを算出する場合について説明したが、4つ以上の追従度を算出してもよい。また、例えば、上述の追突の前に生じている現象(1)〜(3)の(1)にも(2)にも対応しているようなKdBやRFを用いれば、算出する追従度は2つであってもよい。
【0050】
また、上記実施の形態では、追従安全度を表示装置に表示することによりドライバに提示する場合について説明したが、スピーカから音声により提示するようにしてもよい。
【0051】
また、上記の実施の形態では、追従特徴量を5段階の評価値に変換する場合について説明したが、これに限定されるものではなく、5段階以下であってもよいし、5段階以上であってもよい。また、追従度の各々を統一の基準の評価値に変換できればよいため、変換式を用いて変換してもよい。さらに、上記実施の形態では、追従度から追従特徴量を抽出して評価値に変換する場合について説明したが、算出した追従度をそのまま評価値に変換してもよい。
【符号の説明】
【0052】
10 安全度提示装置
12 車間距離センサ
14 車速センサ
18 表示装置
20 コンピュータ
22 追従状況判定部
24 追従度算出部
26 安全度演算部
28 安全度更新部
30 表示制御部
【特許請求の範囲】
【請求項1】
自車両の速度を検出する車速検出手段と、
自車両と先行車両との間の車間距離を検出する車間距離検出手段と、
前記車速検出手段で検出された速度及び前記車間距離検出手段で検出された車間距離に基づいて、前記先行車両に追従走行する前記自車両の前記先行車両との追突の可能性を示す複数の追従度を算出する追従度算出手段と、
前記追従度算出手段で算出された複数の追従度の各々を複数段階で示される評価値に変換し、変換された評価値の特定値または前記評価値より求まる値が安全度として提示手段により提示されるように制御する制御手段と、
を含む安全度提示装置。
【請求項2】
前記複数の追従度は、前記車間距離及び前記自車両と前記先行車両との相対速度を用いた追従度、前記車間距離及び前記自車両の速度を用いた追従度、並びに前記車間距離及び前記先行車両の減速度を用いた追従度を含む請求項1記載の安全度提示装置。
【請求項3】
前記制御手段は、前記評価値が高いほど安全度が高いことを示す場合に、前記自車両の走行開始からの経過時間に応じて、前記評価値の最大値、中間値、最小値の順に安全度として選択する請求項1または請求項2記載の安全度提示装置。
【請求項4】
前記車速検出手段で検出された速度及び前記車間距離検出手段で検出された車間距離に基づいて、前記自車両の速度が予め定めた速度以上の場合、前記自車両と前記先行車両との相対速度が予め定めた相対速度以上の場合、または前記自車両の速度が予め定めた速度以上で、かつ前記自車両と前記先行車両との相対速度が予め定めた相対速度以上の場合に、前記自車両と前記先行車両とが追突する可能性があると判定する判定手段を含み、
前記追従度算出手段は、前記判定手段で前記自車両と前記先行車両とが追突する可能性があると判定された場合に、前記複数の追従度を算出する
請求項1〜請求項3のいずれか1項記載の安全度提示装置。
【請求項5】
前記自車両のドライバを識別する識別手段を含み、
前記制御手段は、前記識別手段で識別されたドライバに応じて、前記複数の追従度の各々を前記評価値に変換する
請求項1〜請求項4のいずれか1項記載の安全度提示装置。
【請求項6】
前記制御手段は、予め定めた期間内に求めた安全度の履歴を提示するか、予め定めた期間内に求めた安全度の平均値を提示するか、または前記安全度の履歴及び前記安全度の平均値を共に提示するように制御する請求項1〜請求項5のいずれか1項記載の安全度提示装置。
【請求項7】
前記制御手段は、予め定めた提示時期になったとき、前記自車両が停止している時間が予め定めた停止時間を超えたとき、または前記安全度を提示するための提示要求を受け付けたときに前記安全度が提示手段により提示されるように制御する請求項1〜請求項6のいずれか1項記載の安全度提示装置。
【請求項8】
コンピュータを、
自車両の速度を検出する車速検出手段で検出された速度、及び自車両と先行車両との間の車間距離を検出する車間距離検出手段で検出された車間距離に基づいて、前記先行車両に追従走行する前記自車両の前記先行車両との追突の可能性を示す複数の追従度を算出する追従度算出手段、
前記追従度算出手段で算出された複数の追従度の各々を複数段階で示される評価値に変換し、変換された評価値の特定値または前記評価値より求まる値が安全度として提示手段により提示されるように制御する制御手段
として機能させるための安全度提示プログラム。
【請求項9】
コンピュータを、請求項1〜請求項7のいずれか1項記載の安全度提示装置の各手段として機能させるための安全度提示プログラム。
【請求項1】
自車両の速度を検出する車速検出手段と、
自車両と先行車両との間の車間距離を検出する車間距離検出手段と、
前記車速検出手段で検出された速度及び前記車間距離検出手段で検出された車間距離に基づいて、前記先行車両に追従走行する前記自車両の前記先行車両との追突の可能性を示す複数の追従度を算出する追従度算出手段と、
前記追従度算出手段で算出された複数の追従度の各々を複数段階で示される評価値に変換し、変換された評価値の特定値または前記評価値より求まる値が安全度として提示手段により提示されるように制御する制御手段と、
を含む安全度提示装置。
【請求項2】
前記複数の追従度は、前記車間距離及び前記自車両と前記先行車両との相対速度を用いた追従度、前記車間距離及び前記自車両の速度を用いた追従度、並びに前記車間距離及び前記先行車両の減速度を用いた追従度を含む請求項1記載の安全度提示装置。
【請求項3】
前記制御手段は、前記評価値が高いほど安全度が高いことを示す場合に、前記自車両の走行開始からの経過時間に応じて、前記評価値の最大値、中間値、最小値の順に安全度として選択する請求項1または請求項2記載の安全度提示装置。
【請求項4】
前記車速検出手段で検出された速度及び前記車間距離検出手段で検出された車間距離に基づいて、前記自車両の速度が予め定めた速度以上の場合、前記自車両と前記先行車両との相対速度が予め定めた相対速度以上の場合、または前記自車両の速度が予め定めた速度以上で、かつ前記自車両と前記先行車両との相対速度が予め定めた相対速度以上の場合に、前記自車両と前記先行車両とが追突する可能性があると判定する判定手段を含み、
前記追従度算出手段は、前記判定手段で前記自車両と前記先行車両とが追突する可能性があると判定された場合に、前記複数の追従度を算出する
請求項1〜請求項3のいずれか1項記載の安全度提示装置。
【請求項5】
前記自車両のドライバを識別する識別手段を含み、
前記制御手段は、前記識別手段で識別されたドライバに応じて、前記複数の追従度の各々を前記評価値に変換する
請求項1〜請求項4のいずれか1項記載の安全度提示装置。
【請求項6】
前記制御手段は、予め定めた期間内に求めた安全度の履歴を提示するか、予め定めた期間内に求めた安全度の平均値を提示するか、または前記安全度の履歴及び前記安全度の平均値を共に提示するように制御する請求項1〜請求項5のいずれか1項記載の安全度提示装置。
【請求項7】
前記制御手段は、予め定めた提示時期になったとき、前記自車両が停止している時間が予め定めた停止時間を超えたとき、または前記安全度を提示するための提示要求を受け付けたときに前記安全度が提示手段により提示されるように制御する請求項1〜請求項6のいずれか1項記載の安全度提示装置。
【請求項8】
コンピュータを、
自車両の速度を検出する車速検出手段で検出された速度、及び自車両と先行車両との間の車間距離を検出する車間距離検出手段で検出された車間距離に基づいて、前記先行車両に追従走行する前記自車両の前記先行車両との追突の可能性を示す複数の追従度を算出する追従度算出手段、
前記追従度算出手段で算出された複数の追従度の各々を複数段階で示される評価値に変換し、変換された評価値の特定値または前記評価値より求まる値が安全度として提示手段により提示されるように制御する制御手段
として機能させるための安全度提示プログラム。
【請求項9】
コンピュータを、請求項1〜請求項7のいずれか1項記載の安全度提示装置の各手段として機能させるための安全度提示プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−186549(P2011−186549A)
【公開日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願番号】特願2010−48271(P2010−48271)
【出願日】平成22年3月4日(2010.3.4)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成23年9月22日(2011.9.22)
【国際特許分類】
【出願日】平成22年3月4日(2010.3.4)
【出願人】(000003609)株式会社豊田中央研究所 (4,200)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]