
安全支援装置、及び、安全支援方法
【課題】対象者が安全確保に必要な情報を得ることができるようにすることを目的とする。
【解決手段】車両から所定範囲の画像を撮像する撮像装置と、撮像した前記画像から対象者を検出する対象者検出装置と、検出した前記対象者から所定距離の位置に前記車両に関する情報を投影する投影装置と、を備える安全支援装置。
【解決手段】車両から所定範囲の画像を撮像する撮像装置と、撮像した前記画像から対象者を検出する対象者検出装置と、検出した前記対象者から所定距離の位置に前記車両に関する情報を投影する投影装置と、を備える安全支援装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、安全支援装置、及び、安全支援方法に関する。
【背景技術】
【0002】
車両を運転する際、運転者は目視と経験に基づいて、自車両の走行エリアの予測を行っている。しかしながら、予測が外れた場合には車両と歩行者との接触が発生することがある。よって、このような事故を防止するための装置が考えられている。
【0003】
特許文献1には、車両に人検出手段を搭載し、歩行者が検出された場合に歩行者の周囲に可視光を照射することが示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−252264号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1の手法では、どの方向から車両が接近しているのかなど、安全確保に必要な情報を歩行者は知ることができない。よって、歩行者などの対象者が安全確保に必要な情報を得ることができるようにすることが望まれる。
【0006】
本発明は、このような事情に鑑みてなされたものであり、対象者が安全確保に必要な情報を得ることができるようにすることを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するための主たる発明は、
車両から所定範囲の画像を撮像する撮像装置と、
撮像した前記画像から対象者を検出する対象者検出装置と、
検出した前記対象者から所定距離の位置に前記車両に関する情報を投影する投影装置と、
を備える安全支援装置である。
【0008】
本発明の他の特徴については、本明細書及び添付図面の記載により明らかにする。
【図面の簡単な説明】
【0009】
【図1】本実施形態における安全支援装置1のブロック図である。
【図2】レーザープロジェクター10の取り付け位置の説明図である。
【図3】本実施形態における安全支援方法のフローチャートである。
【図4】投影パターンPの一例を示す図である。
【図5】本実施形態における投影パターンの投影の説明図である。
【発明を実施するための形態】
【0010】
本明細書及び添付図面の記載により、少なくとも、以下の事項が明らかとなる。すなわち、
車両から所定範囲の画像を撮像する撮像装置と、
撮像した前記画像から対象者を検出する対象者検出装置と、
検出した前記対象者から所定距離の位置に前記車両に関する情報を投影する投影装置と、
を備える安全支援装置である。
このようにすることで、歩行者などの対象者から所定距離の位置(近傍)に車両に関する情報を投影できるので、近傍に投影された車両に関する情報を見ることによって、対象者は安全確保に必要な情報を得ることができる。
【0011】
かかる安全支援装置であって、前記情報は、前記車両の進行方向、前記車両と前記対象者との距離、及び、前記車両の速度の少なくともいずれか1つの情報であることが望ましい。
このようにすることで、安全確保に必要な情報を投影できるので、対象者は安全確保に必要な情報を知ることができる。
【0012】
また、前記投影装置は、レーザープロジェクターを含むことが望ましい。
レーザープロジェクターは、レンズを通さず、常にピントが合っている状態であるので、車両のフロントグリルに取り付けた場合であっても、路面のどの領域でもピントが合い、常に正確に投影パターンを示すことができる。
【0013】
また、前記撮像装置は、赤外線カメラを含むことが望ましい。
このようにすることで、夜間の暗闇などであっても対象者を含む画像を撮像することができる。
【0014】
また、投影される前記情報の色を、前記車両と前記対象者との接触の可能性に応じて異ならせることが望ましい。
このようにすることで、接触の可能性の度合いを対象者は容易に認識することができる。
【0015】
また、前記検出装置は、さらに、前記対象者の進行方向を検出し、前記情報は、前記対象者の進行方向前方に投影されることが望ましい。
このようにすることで、前方に向かって進行している対象者は容易に投影パターンに気づくことがきる。
【0016】
また、前記検出装置は、勾配方向ヒストグラムを特徴量とした識別器を含むことが望ましい。
このようにすることで、撮像された画像の輝度情報に基づいて対象者を検出することができる。
【0017】
また、本明細書及び添付図面の記載により、少なくとも、以下の事項も明らかとなる。すなわち、
車両から所定範囲の画像を撮像することと、
撮像した前記画像から対象者を検出することと、
検出した前記対象者から所定距離の位置に前記車両に関する情報を投影することと、
を含む安全支援方法である。
このようにすることで、歩行者などの対象者から所定距離の位置(近傍)に車両に関する情報を投影できるので、近傍に投影された車両に関する情報を見ることによって、対象者は安全確保に必要な情報を得ることができる。
【0018】
===実施形態===
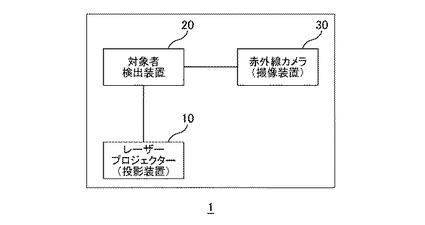
図1は、本実施形態における安全支援装置1のブロック図である。図には、レーザープロジェクター10と、対象者検出装置20と、赤外線カメラ30が示されている。
【0019】
レーザープロジェクター10(投影装置)は、ヘッドライトとは別に用意され、後述する投影パターンPを検出された歩行者Mの足下に投影する。ここでレーザープロジェクター10を採用するのは、レーザープロジェクター10は、レンズを通さず投影されるため、いずれの位置でもピントが合っている状態になるからである。そのため、いずれの位置に投影パターンPを投影する場合であっても、投影パターンPをぼかすことなく投影することが可能である。
【0020】
例えば、車両5のフロントグリル部から投影を行った場合、フロントグリル部に近い位置と離れた位置とでは距離が異なる。よって、レンズを通すとピントの合う位置とピントが合わない位置が生ずるおそれがあるが、レーザープロジェクター10は、レンズを通さないためいずれの位置でもピントが合い、投影パターンPをぼかすことなく投影することができる。
【0021】
なお、投影装置は、レーザープロジェクター10には限られず、投影パターンPを投影することができれば他の装置を用いることとしてもよい。
【0022】
対象者検出装置20は、後述する赤外線カメラ30によって撮像された画像に歩行者Mが含まれるか否かの検出を行う。また、検出された歩行者Mの方向、及び、車両5からの距離を推定する。歩行者Mの検出手法は種々存在するが、ここでは後述するようにHistograms of Oriented Gradients(HOG)特徴量を用いた識別器を用いて検出が行われる。
【0023】
赤外線カメラ30は、中赤外線及び遠赤外線の波長をとらえデジタル値の映像信号を対象者検出装置20に送信する。ここで、中赤外線は2.5μm〜4μmの波長、遠赤外線は、4μm〜1000μmの波長を有する光である。本実施形態では、8〜14μmの波長を用いて体温を検出し、これに対応する映像を出力するが、この波長に限られず、温度を検出できる波長であればよい。
【0024】
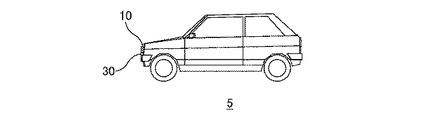
図2は、レーザープロジェクター10及び赤外線カメラ30の取り付け位置の説明図である。図2には、車両5のフロントグリル部にレーザープロジェクター10と赤外線カメラ30が取り付けられている様子が示されている。このようにすることによって、赤外線カメラ30は前方の歩行者M等の対象者を撮像し、レーザープロジェクター10は前方の歩行者M等の足下に後述する投影パターンPを投影する。なお、これらレーザープロジェクター10と赤外線カメラ30の取り付け位置は、これに限られず、車両後方部に取り付けられることとしてもよい。
【0025】
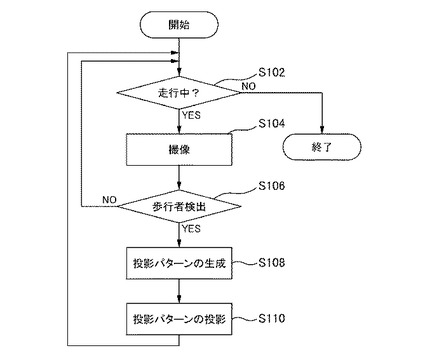
図3は、本実施形態における安全支援方法のフローチャートである。以下、本フローチャートを参照しつつ、本実施形態における安全支援方法について説明を行う。
【0026】
まず、車両5が走行中であるか否かの判定が行われる(S102)。走行中であるか否かは、車両5の速度情報を取得することによって行うことができる。そして、走行中である場合には、ステップS104に進む。一方、走行中ではない場合には、本プロセスを終了する。
【0027】
ステップS104では、赤外線カメラ30によって、車両5の周囲(車両5から所定範囲)の撮像が行われる(S104)。そして、撮像された画像に基づいて車両5の前方を含む周囲に歩行者M(対象者)が存在するか否かの検出が行われる(S106)。
【0028】
歩行者Mの検出方法は、既存の様々な手法を適用することができるが、ここでは一例としてHistograms of Oriented Gradients(HOG)特徴量を用いた検出手法を用いる。
【0029】
歩行者Mの検出は、その前段階である学習過程と、実際に検出を行う検出過程とに分けられる。ステップS106では検出過程が用いられ、学習過程は事前に行われているものとする。
【0030】
まず、学習過程について概略を説明する。学習過程では、歩行者Mを含む多量の画像(赤外線画像)、及び、歩行者Mを含まない多量の画像(赤外線画像)のそれぞれから輝度勾配が算出される。次に、勾配強度と勾配方向から輝度の勾配方向ヒストグラムが作成される。また、勾配方向ヒストグラムは、正規化が行われる。なお、勾配方向ヒスグラムは、複数ピクセル(例えば5×5ピクセル)を1つのセルとして取り扱うこととしてもよい。
【0031】
このような勾配方向ヒストグラムを特徴量として、Adaboostを適用する。学習後のAdaboostの弱識別器により特徴量が自動的に選択され、最終的に、多数ある弱識別器の重み付き多数決により歩行者Mと歩行者M以外に判別することができる識別器が生成される。
【0032】
識別器は、歩行者Mが向かっている方向毎(例えば、右方向に歩行している識別器、左方向に歩行している識別器、車両に近づく方向に歩行している識別器、及び、車両から遠ざかる方向に歩行している識別器)に生成されていることが望ましい。これらそれぞれの識別器を適用することにより、歩行者Mを検出することだけでなく、検出された歩行者Mが向かう方向をも検出できるからである。
【0033】
これらの識別器は、対象者検出装置20に設定される。そして、対象者検出装置20は、赤外線カメラ30から送られた画像に歩行者Mが含まれるか否かの検出を行う。
【0034】
次に、検出過程(S106)について説明する。検出過程では、学習過程で生成された識別器を用いて、赤外線カメラ30が撮像した画像(撮像画像)から歩行者Mを検出する。具体的には、識別器を撮像画像の左上から検出ウィンドウをスケール変化させ、複数回のラスタスキャンを行う。そして、各検出ウィンドウに対して歩行者Mを含むか否かの検出を行う。
【0035】
歩行者Mが検出された場合、その検出ウィンドウの位置及びスケールのサイズが記憶される。また、検出に用いられた識別器の種類(右方向に歩行している識別器、左方向に歩行している識別器、車両5に近づく方向に歩行している識別器、及び、車両5から遠ざかる方向に歩行している識別器のいずれか)も記憶される。
【0036】
また、対象者検出装置20は、その検出ウィンドウの位置に基づいて、車両5からの歩行者Mの方向を求める。また、そのスケールのサイズから車両5からの歩行者Mの距離を求める(そのスケールのサイズが大きければ車両5からの距離は近く、サイズが小さければ車両5からの距離は遠い)。さらに、検出に用いられた識別器の種類に基づいて、歩行者Mの進行方向を求める。これらの情報は、投影パターンPの生成及び投影に用いられる。
【0037】
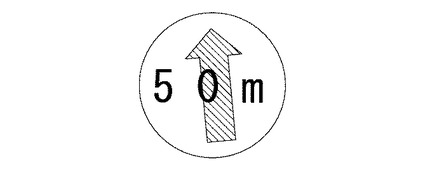
検出が行われた結果、歩行者Mが検出された場合には、その歩行者Mの足下に投影するパターンを生成する(S108)。
図4は、投影パターンPの一例を示す図である。図には、円形のパターン内に方向を示す矢印と距離が示されている。円形のパターンは、例えば、夜間でも目立ちやすい黄色で構成することができ、矢印は赤色で構成することができる。矢印は、投影する車両が向かう方向を示すものとすることができる。また、距離を示す表示は、投影する車両5と歩行者Mとの距離を表示するものとすることができる。
【0038】
車両が向かう方向は、前述のように、検出した歩行者Mと車両との位置関係から求めることができる。また、投影する車両5と検出した歩行者Mとの距離は、歩行者Mが検出されたときの検出ウィンドウのサイズから求めることができる。
【0039】
なお、投影パターンPは上述のパターンに限られない。例えば、投影するパターン内に、投影する車両の速度を含めることもできる。また、投影パターンの形状も円形に限られず矩形とすることもできる。また、投影パターンPの色も黄色に限られず、危険度に応じて色を異ならせることもできる。
【0040】
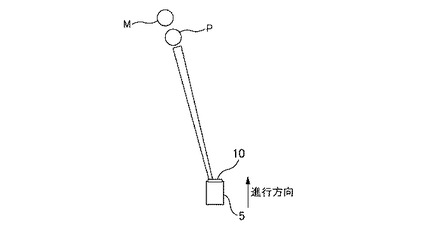
次に、生成した投影パターンを検出した歩行者Mの近傍(歩行者Mから所定距離の位置)に投影する(S110)。
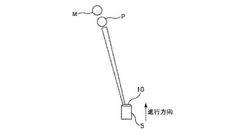
図5は、本実施形態における投影パターンの投影の説明図である。図には、走行中の車両5と歩行者Mと投影パターンPが示されている。このように、車両5のレーザープロジェクター10から歩行者Mの足下に投影パターンPが投影される。歩行者Mは投影された投影パターンPを見ることで、接近しつつある車両5の進行方向や車両5との距離を知ることができる。そして、これらの情報に基づいて車両との接触を避ける安全対策を考えることができる。
【0041】
なお、図5では、投影パターンPは、歩行者Mと車両5とを結ぶ線分上に投影されているが、投影される位置はこれに限られない。例えば、検出された歩行者Mの進行方向先に投影することもできる。また、投影は路面に限られず、壁面に行うこととしてもよい。
【0042】
また、ここでは、対象者を歩行者Mとして歩行者Mの近傍に投影パターンを投影することとしたが、対象者検出装置20が他車両を検出することとして、これら他車両の近傍に投影パターンPを投影することとしてもよい。このようにすることによって、他車両を運転する運転手に接近しつつある車両5の進行方向や車両5との距離の情報を知らせることができる。
【0043】
上記の実施形態は、本発明の理解を容易にするためのものであり、本発明を限定して解釈するためのものではない。本発明は、その趣旨を逸脱することなく、変更、改良され得ると共に、本発明にはその等価物が含まれることは言うまでもない。
【符号の説明】
【0044】
1 安全支援装置、
5 車両、
10 レーザープロジェクター(投影装置)、
20 対象者検出装置、
30 赤外線カメラ(撮像装置)
【技術分野】
【0001】
本発明は、安全支援装置、及び、安全支援方法に関する。
【背景技術】
【0002】
車両を運転する際、運転者は目視と経験に基づいて、自車両の走行エリアの予測を行っている。しかしながら、予測が外れた場合には車両と歩行者との接触が発生することがある。よって、このような事故を防止するための装置が考えられている。
【0003】
特許文献1には、車両に人検出手段を搭載し、歩行者が検出された場合に歩行者の周囲に可視光を照射することが示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−252264号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1の手法では、どの方向から車両が接近しているのかなど、安全確保に必要な情報を歩行者は知ることができない。よって、歩行者などの対象者が安全確保に必要な情報を得ることができるようにすることが望まれる。
【0006】
本発明は、このような事情に鑑みてなされたものであり、対象者が安全確保に必要な情報を得ることができるようにすることを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するための主たる発明は、
車両から所定範囲の画像を撮像する撮像装置と、
撮像した前記画像から対象者を検出する対象者検出装置と、
検出した前記対象者から所定距離の位置に前記車両に関する情報を投影する投影装置と、
を備える安全支援装置である。
【0008】
本発明の他の特徴については、本明細書及び添付図面の記載により明らかにする。
【図面の簡単な説明】
【0009】
【図1】本実施形態における安全支援装置1のブロック図である。
【図2】レーザープロジェクター10の取り付け位置の説明図である。
【図3】本実施形態における安全支援方法のフローチャートである。
【図4】投影パターンPの一例を示す図である。
【図5】本実施形態における投影パターンの投影の説明図である。
【発明を実施するための形態】
【0010】
本明細書及び添付図面の記載により、少なくとも、以下の事項が明らかとなる。すなわち、
車両から所定範囲の画像を撮像する撮像装置と、
撮像した前記画像から対象者を検出する対象者検出装置と、
検出した前記対象者から所定距離の位置に前記車両に関する情報を投影する投影装置と、
を備える安全支援装置である。
このようにすることで、歩行者などの対象者から所定距離の位置(近傍)に車両に関する情報を投影できるので、近傍に投影された車両に関する情報を見ることによって、対象者は安全確保に必要な情報を得ることができる。
【0011】
かかる安全支援装置であって、前記情報は、前記車両の進行方向、前記車両と前記対象者との距離、及び、前記車両の速度の少なくともいずれか1つの情報であることが望ましい。
このようにすることで、安全確保に必要な情報を投影できるので、対象者は安全確保に必要な情報を知ることができる。
【0012】
また、前記投影装置は、レーザープロジェクターを含むことが望ましい。
レーザープロジェクターは、レンズを通さず、常にピントが合っている状態であるので、車両のフロントグリルに取り付けた場合であっても、路面のどの領域でもピントが合い、常に正確に投影パターンを示すことができる。
【0013】
また、前記撮像装置は、赤外線カメラを含むことが望ましい。
このようにすることで、夜間の暗闇などであっても対象者を含む画像を撮像することができる。
【0014】
また、投影される前記情報の色を、前記車両と前記対象者との接触の可能性に応じて異ならせることが望ましい。
このようにすることで、接触の可能性の度合いを対象者は容易に認識することができる。
【0015】
また、前記検出装置は、さらに、前記対象者の進行方向を検出し、前記情報は、前記対象者の進行方向前方に投影されることが望ましい。
このようにすることで、前方に向かって進行している対象者は容易に投影パターンに気づくことがきる。
【0016】
また、前記検出装置は、勾配方向ヒストグラムを特徴量とした識別器を含むことが望ましい。
このようにすることで、撮像された画像の輝度情報に基づいて対象者を検出することができる。
【0017】
また、本明細書及び添付図面の記載により、少なくとも、以下の事項も明らかとなる。すなわち、
車両から所定範囲の画像を撮像することと、
撮像した前記画像から対象者を検出することと、
検出した前記対象者から所定距離の位置に前記車両に関する情報を投影することと、
を含む安全支援方法である。
このようにすることで、歩行者などの対象者から所定距離の位置(近傍)に車両に関する情報を投影できるので、近傍に投影された車両に関する情報を見ることによって、対象者は安全確保に必要な情報を得ることができる。
【0018】
===実施形態===
図1は、本実施形態における安全支援装置1のブロック図である。図には、レーザープロジェクター10と、対象者検出装置20と、赤外線カメラ30が示されている。
【0019】
レーザープロジェクター10(投影装置)は、ヘッドライトとは別に用意され、後述する投影パターンPを検出された歩行者Mの足下に投影する。ここでレーザープロジェクター10を採用するのは、レーザープロジェクター10は、レンズを通さず投影されるため、いずれの位置でもピントが合っている状態になるからである。そのため、いずれの位置に投影パターンPを投影する場合であっても、投影パターンPをぼかすことなく投影することが可能である。
【0020】
例えば、車両5のフロントグリル部から投影を行った場合、フロントグリル部に近い位置と離れた位置とでは距離が異なる。よって、レンズを通すとピントの合う位置とピントが合わない位置が生ずるおそれがあるが、レーザープロジェクター10は、レンズを通さないためいずれの位置でもピントが合い、投影パターンPをぼかすことなく投影することができる。
【0021】
なお、投影装置は、レーザープロジェクター10には限られず、投影パターンPを投影することができれば他の装置を用いることとしてもよい。
【0022】
対象者検出装置20は、後述する赤外線カメラ30によって撮像された画像に歩行者Mが含まれるか否かの検出を行う。また、検出された歩行者Mの方向、及び、車両5からの距離を推定する。歩行者Mの検出手法は種々存在するが、ここでは後述するようにHistograms of Oriented Gradients(HOG)特徴量を用いた識別器を用いて検出が行われる。
【0023】
赤外線カメラ30は、中赤外線及び遠赤外線の波長をとらえデジタル値の映像信号を対象者検出装置20に送信する。ここで、中赤外線は2.5μm〜4μmの波長、遠赤外線は、4μm〜1000μmの波長を有する光である。本実施形態では、8〜14μmの波長を用いて体温を検出し、これに対応する映像を出力するが、この波長に限られず、温度を検出できる波長であればよい。
【0024】
図2は、レーザープロジェクター10及び赤外線カメラ30の取り付け位置の説明図である。図2には、車両5のフロントグリル部にレーザープロジェクター10と赤外線カメラ30が取り付けられている様子が示されている。このようにすることによって、赤外線カメラ30は前方の歩行者M等の対象者を撮像し、レーザープロジェクター10は前方の歩行者M等の足下に後述する投影パターンPを投影する。なお、これらレーザープロジェクター10と赤外線カメラ30の取り付け位置は、これに限られず、車両後方部に取り付けられることとしてもよい。
【0025】
図3は、本実施形態における安全支援方法のフローチャートである。以下、本フローチャートを参照しつつ、本実施形態における安全支援方法について説明を行う。
【0026】
まず、車両5が走行中であるか否かの判定が行われる(S102)。走行中であるか否かは、車両5の速度情報を取得することによって行うことができる。そして、走行中である場合には、ステップS104に進む。一方、走行中ではない場合には、本プロセスを終了する。
【0027】
ステップS104では、赤外線カメラ30によって、車両5の周囲(車両5から所定範囲)の撮像が行われる(S104)。そして、撮像された画像に基づいて車両5の前方を含む周囲に歩行者M(対象者)が存在するか否かの検出が行われる(S106)。
【0028】
歩行者Mの検出方法は、既存の様々な手法を適用することができるが、ここでは一例としてHistograms of Oriented Gradients(HOG)特徴量を用いた検出手法を用いる。
【0029】
歩行者Mの検出は、その前段階である学習過程と、実際に検出を行う検出過程とに分けられる。ステップS106では検出過程が用いられ、学習過程は事前に行われているものとする。
【0030】
まず、学習過程について概略を説明する。学習過程では、歩行者Mを含む多量の画像(赤外線画像)、及び、歩行者Mを含まない多量の画像(赤外線画像)のそれぞれから輝度勾配が算出される。次に、勾配強度と勾配方向から輝度の勾配方向ヒストグラムが作成される。また、勾配方向ヒストグラムは、正規化が行われる。なお、勾配方向ヒスグラムは、複数ピクセル(例えば5×5ピクセル)を1つのセルとして取り扱うこととしてもよい。
【0031】
このような勾配方向ヒストグラムを特徴量として、Adaboostを適用する。学習後のAdaboostの弱識別器により特徴量が自動的に選択され、最終的に、多数ある弱識別器の重み付き多数決により歩行者Mと歩行者M以外に判別することができる識別器が生成される。
【0032】
識別器は、歩行者Mが向かっている方向毎(例えば、右方向に歩行している識別器、左方向に歩行している識別器、車両に近づく方向に歩行している識別器、及び、車両から遠ざかる方向に歩行している識別器)に生成されていることが望ましい。これらそれぞれの識別器を適用することにより、歩行者Mを検出することだけでなく、検出された歩行者Mが向かう方向をも検出できるからである。
【0033】
これらの識別器は、対象者検出装置20に設定される。そして、対象者検出装置20は、赤外線カメラ30から送られた画像に歩行者Mが含まれるか否かの検出を行う。
【0034】
次に、検出過程(S106)について説明する。検出過程では、学習過程で生成された識別器を用いて、赤外線カメラ30が撮像した画像(撮像画像)から歩行者Mを検出する。具体的には、識別器を撮像画像の左上から検出ウィンドウをスケール変化させ、複数回のラスタスキャンを行う。そして、各検出ウィンドウに対して歩行者Mを含むか否かの検出を行う。
【0035】
歩行者Mが検出された場合、その検出ウィンドウの位置及びスケールのサイズが記憶される。また、検出に用いられた識別器の種類(右方向に歩行している識別器、左方向に歩行している識別器、車両5に近づく方向に歩行している識別器、及び、車両5から遠ざかる方向に歩行している識別器のいずれか)も記憶される。
【0036】
また、対象者検出装置20は、その検出ウィンドウの位置に基づいて、車両5からの歩行者Mの方向を求める。また、そのスケールのサイズから車両5からの歩行者Mの距離を求める(そのスケールのサイズが大きければ車両5からの距離は近く、サイズが小さければ車両5からの距離は遠い)。さらに、検出に用いられた識別器の種類に基づいて、歩行者Mの進行方向を求める。これらの情報は、投影パターンPの生成及び投影に用いられる。
【0037】
検出が行われた結果、歩行者Mが検出された場合には、その歩行者Mの足下に投影するパターンを生成する(S108)。
図4は、投影パターンPの一例を示す図である。図には、円形のパターン内に方向を示す矢印と距離が示されている。円形のパターンは、例えば、夜間でも目立ちやすい黄色で構成することができ、矢印は赤色で構成することができる。矢印は、投影する車両が向かう方向を示すものとすることができる。また、距離を示す表示は、投影する車両5と歩行者Mとの距離を表示するものとすることができる。
【0038】
車両が向かう方向は、前述のように、検出した歩行者Mと車両との位置関係から求めることができる。また、投影する車両5と検出した歩行者Mとの距離は、歩行者Mが検出されたときの検出ウィンドウのサイズから求めることができる。
【0039】
なお、投影パターンPは上述のパターンに限られない。例えば、投影するパターン内に、投影する車両の速度を含めることもできる。また、投影パターンの形状も円形に限られず矩形とすることもできる。また、投影パターンPの色も黄色に限られず、危険度に応じて色を異ならせることもできる。
【0040】
次に、生成した投影パターンを検出した歩行者Mの近傍(歩行者Mから所定距離の位置)に投影する(S110)。
図5は、本実施形態における投影パターンの投影の説明図である。図には、走行中の車両5と歩行者Mと投影パターンPが示されている。このように、車両5のレーザープロジェクター10から歩行者Mの足下に投影パターンPが投影される。歩行者Mは投影された投影パターンPを見ることで、接近しつつある車両5の進行方向や車両5との距離を知ることができる。そして、これらの情報に基づいて車両との接触を避ける安全対策を考えることができる。
【0041】
なお、図5では、投影パターンPは、歩行者Mと車両5とを結ぶ線分上に投影されているが、投影される位置はこれに限られない。例えば、検出された歩行者Mの進行方向先に投影することもできる。また、投影は路面に限られず、壁面に行うこととしてもよい。
【0042】
また、ここでは、対象者を歩行者Mとして歩行者Mの近傍に投影パターンを投影することとしたが、対象者検出装置20が他車両を検出することとして、これら他車両の近傍に投影パターンPを投影することとしてもよい。このようにすることによって、他車両を運転する運転手に接近しつつある車両5の進行方向や車両5との距離の情報を知らせることができる。
【0043】
上記の実施形態は、本発明の理解を容易にするためのものであり、本発明を限定して解釈するためのものではない。本発明は、その趣旨を逸脱することなく、変更、改良され得ると共に、本発明にはその等価物が含まれることは言うまでもない。
【符号の説明】
【0044】
1 安全支援装置、
5 車両、
10 レーザープロジェクター(投影装置)、
20 対象者検出装置、
30 赤外線カメラ(撮像装置)
【特許請求の範囲】
【請求項1】
車両から所定範囲の画像を撮像する撮像装置と、
撮像した前記画像から対象者を検出する対象者検出装置と、
検出した前記対象者から所定距離の位置に前記車両に関する情報を投影する投影装置と、
を備える安全支援装置。
【請求項2】
前記情報は、前記車両の進行方向、前記車両と前記対象者との距離、及び、前記車両の速度の少なくともいずれか1つの情報である、請求項1に記載の安全支援装置。
【請求項3】
前記投影装置は、レーザープロジェクターを含む、請求項1又は2に記載の安全支援装置。
【請求項4】
前記撮像装置は、赤外線カメラを含む、請求項1〜3のいずれかに記載の安全支援装置。
【請求項5】
投影される前記情報の色を、前記車両と前記対象者との接触の可能性に応じて異ならせる、請求項1〜4のいずれかに記載の安全支援装置。
【請求項6】
前記対象者検出装置は、さらに、前記対象者の進行方向を検出し、
前記情報は、前記対象者の進行方向前方に投影される、請求項1〜5のいずれかに記載の安全支援装置。
【請求項7】
前記対象者検出装置は、勾配方向ヒストグラムを特徴量とした識別器を含む、請求項1〜6のいずれかに記載の安全支援装置。
【請求項8】
車両から所定範囲の画像を撮像することと、
撮像した前記画像から対象者を検出することと、
検出した前記対象者から所定距離の位置に前記車両に関する情報を投影することと、
を含む安全支援方法。
【請求項1】
車両から所定範囲の画像を撮像する撮像装置と、
撮像した前記画像から対象者を検出する対象者検出装置と、
検出した前記対象者から所定距離の位置に前記車両に関する情報を投影する投影装置と、
を備える安全支援装置。
【請求項2】
前記情報は、前記車両の進行方向、前記車両と前記対象者との距離、及び、前記車両の速度の少なくともいずれか1つの情報である、請求項1に記載の安全支援装置。
【請求項3】
前記投影装置は、レーザープロジェクターを含む、請求項1又は2に記載の安全支援装置。
【請求項4】
前記撮像装置は、赤外線カメラを含む、請求項1〜3のいずれかに記載の安全支援装置。
【請求項5】
投影される前記情報の色を、前記車両と前記対象者との接触の可能性に応じて異ならせる、請求項1〜4のいずれかに記載の安全支援装置。
【請求項6】
前記対象者検出装置は、さらに、前記対象者の進行方向を検出し、
前記情報は、前記対象者の進行方向前方に投影される、請求項1〜5のいずれかに記載の安全支援装置。
【請求項7】
前記対象者検出装置は、勾配方向ヒストグラムを特徴量とした識別器を含む、請求項1〜6のいずれかに記載の安全支援装置。
【請求項8】
車両から所定範囲の画像を撮像することと、
撮像した前記画像から対象者を検出することと、
検出した前記対象者から所定距離の位置に前記車両に関する情報を投影することと、
を含む安全支援方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2013−114536(P2013−114536A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−261494(P2011−261494)
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月30日(2011.11.30)
【出願人】(000002369)セイコーエプソン株式会社 (51,324)
【Fターム(参考)】
[ Back to top ]