
安全走行支援装置
【課題】追突や衝突を予測し、危険と判断した場合に危険の案内を、ドライバーに煩わしさを軽減して確実に案内することのできる安全走行支援装置を提供すること。
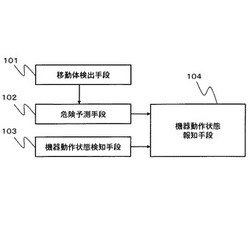
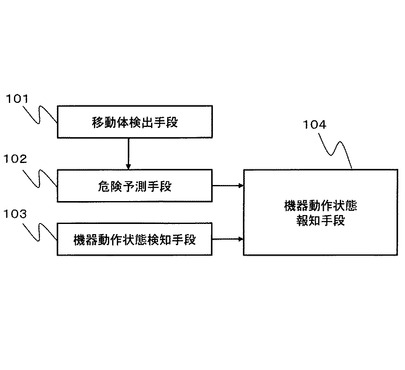
【解決手段】移動体を検出する移動体検出手段101と、移動体検出手段101で検出した移動体と自車との衝突が発生するかどうかの危険を予測する危険予測手段102と、車両に搭載された機器の動作状態を検知する機器動作状態検知手段103と、機器の動作状態を報知音で案内する機器動作状態報知手段104とを備える。機器動作状態報知手段104が、危険予測手段102の判断結果に応じて報知音を変更する。
【解決手段】移動体を検出する移動体検出手段101と、移動体検出手段101で検出した移動体と自車との衝突が発生するかどうかの危険を予測する危険予測手段102と、車両に搭載された機器の動作状態を検知する機器動作状態検知手段103と、機器の動作状態を報知音で案内する機器動作状態報知手段104とを備える。機器動作状態報知手段104が、危険予測手段102の判断結果に応じて報知音を変更する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自動車などの車両を運転するドライバーに対して衝突や追突、歩行者との接触などの危険があるかどうかを案内するための安全走行支援装置に関するものである。
【背景技術】
【0002】
車両のドライバーに対して、衝突や追突、歩行者との接触などの危険があるかどうかを案内するには、ドライバーにとって必要なときだけ警告することが望ましい。つまり、ドライバーが既に危険な状態であることを認知している場合には警報を出力する必要はなく、かえって、ドライバーにとって余計な警報が報知されると煩わしさが増加してしまう。
【0003】
従来、車両のドライバーに対して、危険な状態または安全な状態であるかを案内する装置としては、例えば、ドライバーが危険な状態であるかどうかを確認したい場合だけに警報を案内するものがあった(例えば、特許文献1参照)。
【0004】
図6は特許文献1に記載された従来装置の構成を示すブロック図である。図6において、警戒情報要求受付手段601はドライバーが警報情報を受け付けるかどうかを判定するスイッチであり、ドライバーが危険な状態であるかどうかを知りたい場合だけ、つまり、ドライバーが警報情報を要求している場合だけ操作されて警報情報が出力されるようになっている。
【0005】
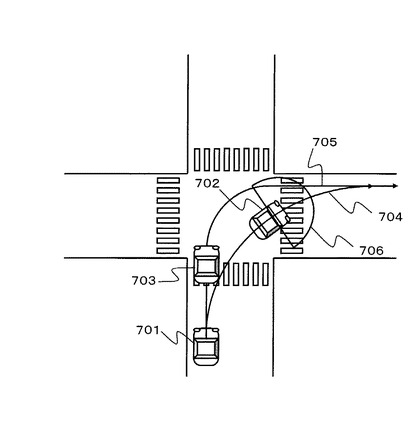
また、歩行者との接触を防ぐために、交差点の右左折時に運転者の視界が十分確保できるような旋回軌跡になるようにして、ドライバーの危険発見の遅れが少なくなるように予め理想の旋回軌跡になるように案内をするものがあった(例えば、特許文献2参照)。
【0006】
図7は、特許文献2に記載された従来装置を説明するための図であり、交差点での右折する際の車両の挙動を示した図である。701、702、703は軌跡上の位置、704と705は車両の走行する軌跡、706は軌跡上の位置702におけるドライバーの視界範囲を示している。軌跡704では十分な視界が確保できないので、軌跡705になるように旋回開始位置をウインカーに連動した音を変更することで案内している。また、死角などをモニタで表示するようにして危険な状態をドライバーに案内している。
【特許文献1】特開2004−86523号公報(第1頁、図1)
【特許文献2】特開2005−215771号公報(第1−2頁、図1)
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、交差点で一時停止し、右折待ちをしている場合は、対向車の速度や位置関係で右折できるタイミングがドライバーにとって判断しにくいことがある。このような場合、衝突の危険があるかどうかの案内を行うには、従来の方法では以下の課題があった。
【0008】
すなわち、特許文献1に記載された構成では、ドライバーが警報を要求しない限り警報は出力されないので、ドライバーが右折を開始した際に車載機器が衝突や追突の危険性を予測しても、ドライバーがその危険な状態を予測することができなければ、警報は出力されずドライバーに危険な状態であることを確実に伝えることはできない。
【0009】
また、特許文献2に記載の構成では、追突や衝突の予測をしていないので、右左折する際の衝突の判断はできない。また、ウインカーに連動した音を用いて案内したとしても、
右折待ちの際は常に案内音が報知されるので、煩わしさが発生してしまう。
【0010】
したがって、従来の技術では、追突や衝突の危険を車載機器が予測した場合にドライバーに煩わしさを感じさせずに、かつドライバーに危険を確実に案内することはできないという課題があった。
【0011】
本発明は、前記従来の課題を解決するもので、危険な状態であるかどうかを案内する際に、ドライバーに対して、煩わしさを軽減することができ、かつ危険を確実に案内することができる安全走行支援装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明の安全走行支援装置は、車両に搭載される安全走行支援装置であって、移動体を検出する移動体検出手段と、前記移動体検出手段で検出した移動体と自車との間で危険が発生するかどうかを予測する危険予測手段と、車両に搭載された機器の動作状態を検知する機器動作状態検知手段と、前記機器動作状態検知手段で検知した前記機器の動作状態を報知音で案内する機器動作状態報知手段とを備え、前記危険予測手段の危険予測結果に応じて、前記機器動作状態報知手段の報知音を変更する構成を有する。
【0013】
この構成によって、衝突や追突などの危険を予測した場合に、ドライバーにその危険を確実に報知することができるとともに、ドライバーへの煩わしさを軽減することができる。
【0014】
本発明の安全走行支援装置は、前記機器がウインカーまたはナビゲーションであり、前記機器動作状態検知手段が、前記ウインカーの動作状態または前記ナビゲーションの右左折案内の動作状態を検知し、前記機器動作状態検知手段の検知結果に応じて、前記機器動作状態報知手段が前記ウインカーの動作確認音を変更する構成を有する。
【0015】
この構成によって、ウインカーの動作確認音が変わるだけであるので、余計な報知音が出力されることによるドライバーの感じる煩わしさを軽減できる。
【0016】
本発明の安全走行支援装置は、前記機器動作状態検知手段で、車両が走行可能状態であるかどうか検知し、前記機器動作状態検知手段の検知結果に応じて、前記機器動作状態報知手段が車両の走行可能状態の確認音を変更する構成を有する。
【0017】
この構成によって、余計な報知音が出力されることによるドライバーの感じる煩わしさを軽減できる。
【0018】
本発明の安全走行支援装置は、前記危険予測手段が危険の種類を判別し、前記機器動作状態報知手段が危険の種類によって前記機器の動作確認音を変更する構成を有する。
【0019】
この構成によって、ドライバーは危険の種類を動作確認音に応じて確認することができる。
【0020】
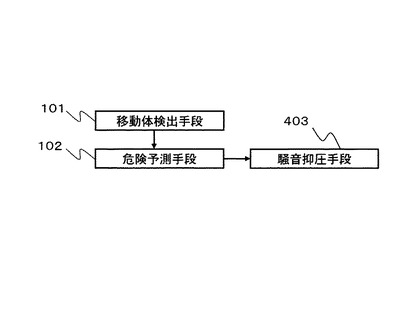
本発明の安全走行支援装置は、車両に搭載される安全走行支援装置であって、移動体を検出する移動体検出手段と、前記移動体検出手段で検出した物体と自車との間で危険が発生するかどうかを予測する危険予測手段と、車室内またはドライバーの耳近辺の走行ノイズまたは車室外の騒音を抑制する騒音抑圧手段とを備え、前記危険予測手段の危険予測結果に応じて、前記騒音抑圧手段の動作状態を変更する構成を有する。
【0021】
この構成によって、危険を予測した場合に、騒音抑圧手段の動作を停止または抑圧する
騒音量を少なくすることができ、ドライバーに危険を予測した結果を伝えることができるとともに、ドライバーに対して余計な警報による煩わしさを軽減することができる。
【発明の効果】
【0022】
本発明の安全走行支援装置によれば、危険を予測した場合にドライバーにその危険を確実に報知することができるとともに、余計な報知音が出力されることによるドライバーへの煩わしさを軽減することができる。
【発明を実施するための最良の形態】
【0023】
以下、本発明の実施の形態について、図面を参照しながら説明する。
【0024】
(実施の形態1)
図1は、本発明の実施の形態1における車両に搭載される安全走行支援装置の構成を示すブロック図である。ここでは、図1を用いながら、交差点で右折待ちのため一時停止している場合における発進可能状態の案内を例に説明する。
【0025】
図1において、移動体検出手段101は、例えば、車両前方の映像を撮影するカメラと、演算機で構成したセンサーであり、車両などの移動体を検知し、その位置や速度や進んでいる方向を検知するものである。例えば、カメラは車室内に車両前方の映像を写すように2個配置しステレオカメラとして用い、車両前方の映像を常に撮影するようにする。演算機はその2個のカメラで撮影した映像それぞれに対してフレーム毎に処理を行う。まず、映像のノイズを取り除くために移動平均を用いて平滑化を行い、デジタルフィルタを用いて映像の高周波成分を抽出することによりエッジ抽出を行う。その後の映像に対して2値化を行う。この2値化した映像に対して、直方体に近い形をパターンマッチングにより抽出しこれを前方にある立体物とする。また、二つの映像から得られた2値化した映像に対して差分を計算することにより、二つの映像の視差を計算し、視差が大きいものは近くに存在する立体物とし、視差が小さいものは遠くにある立体物とする。この時、自車と立体物との相対位置関係は三角測量を用いて計算する。この処理をフレーム毎に行い、フレーム毎の立体物の相対位置関係を記録しておく。相対位置の座標は自車位置を原点とし、自車が向いている方向にy軸をとった2次元座標とする。
【0026】
移動体検出手段101が検出する移動体としては、車両のほか、歩行者、バイク、自転車などが含まれる。
【0027】
危険予測手段102は、移動体検出手段101と有機的に関連して立体物と自車との衝突が発生するかどうかの危険を予測する。まず、自車が交差点の右折待ちのために停止している状態を初期状態とし、その時刻から右折を開始した場合の時刻と位置を計算する。例えば、0.1秒毎に5秒後まで位置を0秒の時の位置を原点とし、0秒の時の自車が向いている方向をy軸にとり2次元座標として計算する。この時、舵角や速度の変化はある一定のパターンを与えておいても良いし、普段から右折時の舵角や速度の変化を記録しておき、この変化のパターンを平均化して用いても良いし、カメラで交差点の形状を認識して自車の現在位置と交差する道路の車線に円弧を当てはめて軌跡を予測しても良い。一方で、移動体検出手段101で抽出した立体物の5秒後までの軌跡を0.1秒毎に予測する。移動体検出手段101では立体物の今までの軌跡が記録してあるので、この軌跡を外挿補間すれば良い。最も単純な方法としては、現在のフレームと一つ前のフレームで求めた相対位置を線形補間することにより立体物の進行方向を2次元のベクトルとして求め、現在の立体物の位置にこの2次元ベクトルを複数回加算することによりフレーム間隔時間での軌跡が予測できる。このフレーム間隔時間で求めた位置を、さらに線形補間して0.1秒間隔の位置に修正しておく。そして、自車と立体物の0.1秒毎に求めた予測軌跡に対して、それぞれの0.1秒毎の時刻に対してこれらの位置のユーグリット距離を計算する
。このユーグリット距離がある閾値(例えば、車両1台分で約4m)より短い場合があった場合に衝突する危険の可能性があると予測する。
【0028】
一方、機器動作状態検知手段103は、例えば、ウインカーの動作状態を検出する。これは単純にウインカーのスイッチが右になっているかどうかを検出すれば良い。また、ウインカーの動作状態を検出する代わりに、例えば、ナビゲーションの右左折案内の動作状態を検出するようにしても良い。
【0029】
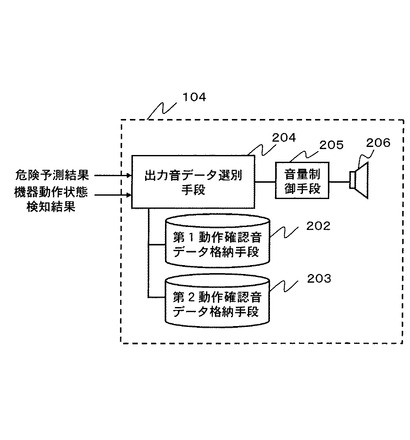
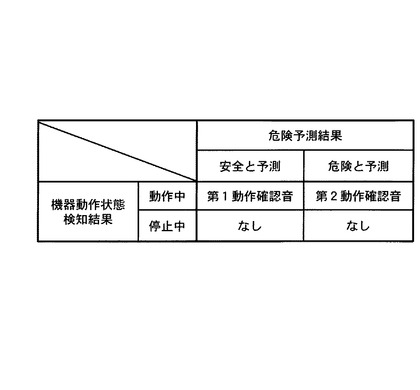
機器動作状態報知手段104は、例えば、図2のように構成する。図2において、第1動作確認音データ格納手段202と第2動作確認音データ格納手段203は、不揮発の半導体メモリで構成し、ウインカーが動作していることをドライバーに伝えるための動作確認のための音データを格納しておく。この時、第1動作確認音データ格納手段202と第2動作確認音データ格納手段203には異なった音を格納しておく。例えば、第1動作確認音データ格納手段202には、ウインカーの一回の点滅に同期した「カッ チ」というような機械式のリレーの動作音を模擬する音(第1動作確認音)を格納しておく。一方、第2動作確認音データ格納手段203には、同様にウインカーの一回の点滅に同期した「カッ」というような音(第2動作確認音)を格納しておく。出力音データ選別手段204では、危険予測結果と機器動作状態検知結果に従って、報知するかどうかと報知する音を選択する。その選択のアルゴリズムを図3に示す。図3では危険予測結果として安全と危険の2種類を出力する場合を例にして示している。報知する内容は、次のとおりである。機器が動作中で安全と予測した場合には第1動作確認音を報知し、一方機器が動作中で危険と予測した場合には第2動作確認音を報知する。機器が停止中の場合には何も選択せずに報知しないように制御する。危険予測結果として2種類以上の状態を予測し、その結果を報知する場合には動作確認音を格納する手段をその数に応じて増やせば良い。
【0030】
音量制御手段205は、電子化された音データをD/Aコンバータでアナログに変換した後にパワーアンプを用いてゲインを増幅する。
【0031】
スピーカ206は、音量制御手段205から出力されるアナログ信号を音として出力する。
【0032】
上記説明では、ウインカーの動作確認音を電子的な制御によって変更するように説明したが、ウインカーの点滅を切り替えるリレーの動作音がそのまま動作確認音になっている場合には、このリレーに新たにもう一つの端子を設け、この端子に危険状態を入力することにより動作音が変わるようにしても良いし、リレーの動作音に重畳する音だけを別途出力するようにして、ドライバーがその違いを知覚できるようにしても良い。例えば、同じリレーをもう一つ用意し、危険予測の結果に応じてこの追加したリレーが動作するようにするとともに、この追加したリレーの動作に0.2秒程度の遅れをつけて動作させれば、ウインカーの1回の点滅に対して「カッ チ」という音と「カッカッ チチ」という音を区別して報知できるので、ドライバーはその違いを知覚できる。
【0033】
なお、本実施の形態1では、ウインカーの動作確認音として機械式のリレーの動作音を模擬した音を例に説明したが、動作確認音としてはドライバーが煩わしさを感じない効果音であれば何でも良い。例えば、ウインカーの1回の点滅に同期して「イッケ」と「ダッメ」とそれぞれ発声している音声を素材としてこれに機械的な声質に変換して、これらを効果音として危険を予測した結果に従って切り替えて報知しても良い。
【0034】
また、本実施の形態1では、ウインカーの動作状態を検知し、ウインカーの動作確認音を変更する場合について説明したが、ハイブリット車で発進可能状態であることをドライバーに確認させるためのエンジン音を模擬した動作確認音を変更するようにしても良い。
また、機器動作状態報知手段は、専用の手段として説明したが、車のオーディオやカーナビゲーションにあるスピーカやアンプなどの音響機器と併用して構成することも可能である。さらに、機器動作状態報知手段は、MDプレーヤやラジオなどの音量を変更するようにして構成することも可能であり、この場合は危険な状態では音量を小さくすることにより、余計な警報音を放置しないでドライバーに危険な状態や安全な状態を伝えるようにしても良い。
【0035】
また、本実施の形態1では、右折時の危険判断を行う例について説明したが、本発明は、右折時の危険予測での報知に限定されるものでないことはいうまでもない。例えば、単路走行時の追突の危険や、交差点左折時の歩行者を巻き込む危険など、従来から事故の危険を予測し、危険な場合に警報を報知している全ての場合に適用することが可能である。この時は機器の動作確認音として前記のハイブリット車で発進可能状態であることをドライバーに確認させるためのエンジン音を模擬した動作確認音などを用いれば良い。
【0036】
さらに、危険予測手段が危険な状態の種類を判別し、その危険な状態の種類に応じて機器の動作確認音の出力方法を変更し、危険の種類をドライバーに伝えることも可能である。例えば、自車の右側に危険な状態がある場合には車室内の右側のスピーカから動作確認音を出力し、反対に自車の左側に危険な状態がある場合には車室内の左側のスピーカから動作確認音を出力することも可能である。また、危険な状態を伝えるために動作確認音をそれぞれ用意することも可能である。例えば、交差点での左折時に危険予測手段が歩行者を巻き込む危険を予測した場合には、ウインカーの1回の点滅に合わせた動作確認音として「ヒト」と発声している音声を素材にこれに機械的な声質に変換して動作確認音として用いる。このようにすれば、ドライバーには危険な状態としての対象が人間であることを伝えることができる。
【0037】
以上のように、本実施の形態1によれば、危険予測手段102の危険予測結果と機器動作状態検出手段103の機器動作状態検知結果を機器動作状態報知手段104に入力することにより、車室内の機器の動作状況を知らせる動作確認音を、危険を予測した結果に従って変更することが可能となり、普段から車室内にある音を用いて走行に関する危険および安全に関する情報をドライバーに確実に報知することができるとともに、余計な警報によるドライバーに対する煩わしさを軽減することができる。例えば、交差点で右折待ちをしている場合で、対向車両が連続して交差点に進入しているときは右折が危険な状態と予測されるが、このときも常にウインカーの動作確認音として異なった音が出力されているだけであるので、ドライバーに対する煩わしさを大幅に軽減できるとともに、右折可能となった場合にドライバーがその状況を把握していても、ウインカーの動作音が変わるだけであるので、余計な報知音が出力されることによるドライバーの感じる煩わしさを大幅に軽減できる。
【0038】
(実施の形態2)
図4は、本発明の実施の形態2における安全走行支援装置を構成するブロック図である。図4において、図1と同じ構成要素の移動体検出手段と危険予測手段については同じ符号を用い、その説明を省略する。
【0039】
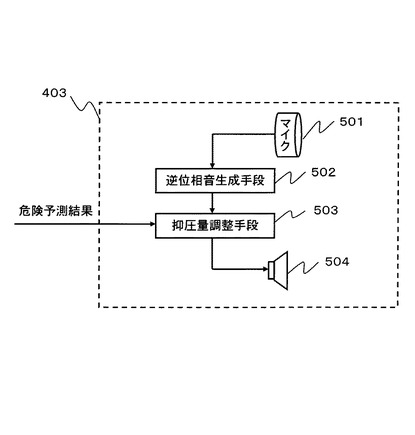
図4における騒音抑圧手段403の構成を図5に示す。騒音抑圧手段403は、マイク501と逆位相音生成手段502と抑圧量調整手段503とスピーカ504で構成している。
【0040】
マイク501は、騒音を収音するためのマイクであり、車室外から最も騒音が多く車室内に入ってくる位置に配置する。
【0041】
スピーカ504は、ドライバーの耳付近に配置し、騒音をキャンセルする音を出力させる。騒音をキャンセルする音は逆位相音生成手段502で生成する。例えば、マイク501で収音した騒音に対して符号を反転し、スピーカ504からドライバーの耳までの音の伝達時間と、マイク501からドライバーの耳までの音の伝達時間とを考慮して遅れ時間を加えて逆位相音を生成する。
【0042】
抑圧量調整手段503は、危険予測の結果に応じて騒音の抑圧量を調整する。例えば、危険予測の結果が危険と安全の2種類の場合、安全と予測されたときは抑圧量が最大になるようにし、危険と予測されたときは抑圧量を最低にする。
【0043】
なお、本実施の形態2では、マイクが一つの場合を例にして説明したが、マイクを複数用いてドライバーの耳付近の騒音を推定して逆位相の音を生成しても良い、また、スピーカも左右の耳付近に2個以上配置して左右の耳毎に逆位相の音を再生するようにしても良い、騒音抑圧の基本的な方法としては上記の例に限定するものではない。
【0044】
なお、本実施の形態2では、騒音を抑圧する方法として電子的な方法を用いた場合について説明したが、車両の窓ガラスを少し開閉する方法を用いて騒音抑圧手段403を構成しても、車室内に入ってくる車室外の騒音の大きさを変更でき、この騒音の違いをドライバーに知覚させることにより同様の効果を得ることができる。
【0045】
以上のように、本実施の形態2によれば、危険予測手段102の危険予測結果に応じて騒音抑圧手段403の動作状態を変更することがきるので、危険を予測した結果に従ってドライバーに聞こえる車室外の騒音の大きさを変更することが可能となり、走行に関する危険および安全に関する情報をドライバーに伝えることができるとともに、余計な警報によるドライバーに対する煩わしさを軽減することができる。
【産業上の利用可能性】
【0046】
本発明にかかる安全走行支援装置は、危険を予測した場合にドライバーにその危険を確実に報知することができるとともに、余計な報知音が出力されることによるドライバーへの煩わしさを軽減することができるという効果を有し、危険状態を予測した場合および安全状態と予測した場合に報知する装置などとして有用である。
【図面の簡単な説明】
【0047】
【図1】本発明の実施の形態1における安全走行支援装置の構成を示すブロック図
【図2】本発明の実施の形態1における機器動作状態報知手段の構成を示すブロック図
【図3】本発明の実施の形態1における出力音データ選別手段のデータ選別を示す図
【図4】本発明の実施の形態2における安全走行支援装置の構成を示すブロック図
【図5】本発明の実施の形態2における騒音抑圧手段の構成を示すブロック図
【図6】従来の安全走行支援装置の構成を示すブロック図
【図7】従来の安全走行支援装置を説明するための図
【符号の説明】
【0048】
101 移動体検出手段
102 危険予測手段
103 機器動作状態検知手段
104 機器動作状態報知手段
202 第1動作確認音データ格納手段
203 第2動作確認音データ格納手段
204 出力音データ選別手段
205 音量制御手段
206 スピーカ
403 騒音抑圧手段
501 マイク
502 逆位相音生成手段
503 抑圧量調整手段
504 スピーカ
【技術分野】
【0001】
本発明は、自動車などの車両を運転するドライバーに対して衝突や追突、歩行者との接触などの危険があるかどうかを案内するための安全走行支援装置に関するものである。
【背景技術】
【0002】
車両のドライバーに対して、衝突や追突、歩行者との接触などの危険があるかどうかを案内するには、ドライバーにとって必要なときだけ警告することが望ましい。つまり、ドライバーが既に危険な状態であることを認知している場合には警報を出力する必要はなく、かえって、ドライバーにとって余計な警報が報知されると煩わしさが増加してしまう。
【0003】
従来、車両のドライバーに対して、危険な状態または安全な状態であるかを案内する装置としては、例えば、ドライバーが危険な状態であるかどうかを確認したい場合だけに警報を案内するものがあった(例えば、特許文献1参照)。
【0004】
図6は特許文献1に記載された従来装置の構成を示すブロック図である。図6において、警戒情報要求受付手段601はドライバーが警報情報を受け付けるかどうかを判定するスイッチであり、ドライバーが危険な状態であるかどうかを知りたい場合だけ、つまり、ドライバーが警報情報を要求している場合だけ操作されて警報情報が出力されるようになっている。
【0005】
また、歩行者との接触を防ぐために、交差点の右左折時に運転者の視界が十分確保できるような旋回軌跡になるようにして、ドライバーの危険発見の遅れが少なくなるように予め理想の旋回軌跡になるように案内をするものがあった(例えば、特許文献2参照)。
【0006】
図7は、特許文献2に記載された従来装置を説明するための図であり、交差点での右折する際の車両の挙動を示した図である。701、702、703は軌跡上の位置、704と705は車両の走行する軌跡、706は軌跡上の位置702におけるドライバーの視界範囲を示している。軌跡704では十分な視界が確保できないので、軌跡705になるように旋回開始位置をウインカーに連動した音を変更することで案内している。また、死角などをモニタで表示するようにして危険な状態をドライバーに案内している。
【特許文献1】特開2004−86523号公報(第1頁、図1)
【特許文献2】特開2005−215771号公報(第1−2頁、図1)
【発明の開示】
【発明が解決しようとする課題】
【0007】
しかしながら、交差点で一時停止し、右折待ちをしている場合は、対向車の速度や位置関係で右折できるタイミングがドライバーにとって判断しにくいことがある。このような場合、衝突の危険があるかどうかの案内を行うには、従来の方法では以下の課題があった。
【0008】
すなわち、特許文献1に記載された構成では、ドライバーが警報を要求しない限り警報は出力されないので、ドライバーが右折を開始した際に車載機器が衝突や追突の危険性を予測しても、ドライバーがその危険な状態を予測することができなければ、警報は出力されずドライバーに危険な状態であることを確実に伝えることはできない。
【0009】
また、特許文献2に記載の構成では、追突や衝突の予測をしていないので、右左折する際の衝突の判断はできない。また、ウインカーに連動した音を用いて案内したとしても、
右折待ちの際は常に案内音が報知されるので、煩わしさが発生してしまう。
【0010】
したがって、従来の技術では、追突や衝突の危険を車載機器が予測した場合にドライバーに煩わしさを感じさせずに、かつドライバーに危険を確実に案内することはできないという課題があった。
【0011】
本発明は、前記従来の課題を解決するもので、危険な状態であるかどうかを案内する際に、ドライバーに対して、煩わしさを軽減することができ、かつ危険を確実に案内することができる安全走行支援装置を提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明の安全走行支援装置は、車両に搭載される安全走行支援装置であって、移動体を検出する移動体検出手段と、前記移動体検出手段で検出した移動体と自車との間で危険が発生するかどうかを予測する危険予測手段と、車両に搭載された機器の動作状態を検知する機器動作状態検知手段と、前記機器動作状態検知手段で検知した前記機器の動作状態を報知音で案内する機器動作状態報知手段とを備え、前記危険予測手段の危険予測結果に応じて、前記機器動作状態報知手段の報知音を変更する構成を有する。
【0013】
この構成によって、衝突や追突などの危険を予測した場合に、ドライバーにその危険を確実に報知することができるとともに、ドライバーへの煩わしさを軽減することができる。
【0014】
本発明の安全走行支援装置は、前記機器がウインカーまたはナビゲーションであり、前記機器動作状態検知手段が、前記ウインカーの動作状態または前記ナビゲーションの右左折案内の動作状態を検知し、前記機器動作状態検知手段の検知結果に応じて、前記機器動作状態報知手段が前記ウインカーの動作確認音を変更する構成を有する。
【0015】
この構成によって、ウインカーの動作確認音が変わるだけであるので、余計な報知音が出力されることによるドライバーの感じる煩わしさを軽減できる。
【0016】
本発明の安全走行支援装置は、前記機器動作状態検知手段で、車両が走行可能状態であるかどうか検知し、前記機器動作状態検知手段の検知結果に応じて、前記機器動作状態報知手段が車両の走行可能状態の確認音を変更する構成を有する。
【0017】
この構成によって、余計な報知音が出力されることによるドライバーの感じる煩わしさを軽減できる。
【0018】
本発明の安全走行支援装置は、前記危険予測手段が危険の種類を判別し、前記機器動作状態報知手段が危険の種類によって前記機器の動作確認音を変更する構成を有する。
【0019】
この構成によって、ドライバーは危険の種類を動作確認音に応じて確認することができる。
【0020】
本発明の安全走行支援装置は、車両に搭載される安全走行支援装置であって、移動体を検出する移動体検出手段と、前記移動体検出手段で検出した物体と自車との間で危険が発生するかどうかを予測する危険予測手段と、車室内またはドライバーの耳近辺の走行ノイズまたは車室外の騒音を抑制する騒音抑圧手段とを備え、前記危険予測手段の危険予測結果に応じて、前記騒音抑圧手段の動作状態を変更する構成を有する。
【0021】
この構成によって、危険を予測した場合に、騒音抑圧手段の動作を停止または抑圧する
騒音量を少なくすることができ、ドライバーに危険を予測した結果を伝えることができるとともに、ドライバーに対して余計な警報による煩わしさを軽減することができる。
【発明の効果】
【0022】
本発明の安全走行支援装置によれば、危険を予測した場合にドライバーにその危険を確実に報知することができるとともに、余計な報知音が出力されることによるドライバーへの煩わしさを軽減することができる。
【発明を実施するための最良の形態】
【0023】
以下、本発明の実施の形態について、図面を参照しながら説明する。
【0024】
(実施の形態1)
図1は、本発明の実施の形態1における車両に搭載される安全走行支援装置の構成を示すブロック図である。ここでは、図1を用いながら、交差点で右折待ちのため一時停止している場合における発進可能状態の案内を例に説明する。
【0025】
図1において、移動体検出手段101は、例えば、車両前方の映像を撮影するカメラと、演算機で構成したセンサーであり、車両などの移動体を検知し、その位置や速度や進んでいる方向を検知するものである。例えば、カメラは車室内に車両前方の映像を写すように2個配置しステレオカメラとして用い、車両前方の映像を常に撮影するようにする。演算機はその2個のカメラで撮影した映像それぞれに対してフレーム毎に処理を行う。まず、映像のノイズを取り除くために移動平均を用いて平滑化を行い、デジタルフィルタを用いて映像の高周波成分を抽出することによりエッジ抽出を行う。その後の映像に対して2値化を行う。この2値化した映像に対して、直方体に近い形をパターンマッチングにより抽出しこれを前方にある立体物とする。また、二つの映像から得られた2値化した映像に対して差分を計算することにより、二つの映像の視差を計算し、視差が大きいものは近くに存在する立体物とし、視差が小さいものは遠くにある立体物とする。この時、自車と立体物との相対位置関係は三角測量を用いて計算する。この処理をフレーム毎に行い、フレーム毎の立体物の相対位置関係を記録しておく。相対位置の座標は自車位置を原点とし、自車が向いている方向にy軸をとった2次元座標とする。
【0026】
移動体検出手段101が検出する移動体としては、車両のほか、歩行者、バイク、自転車などが含まれる。
【0027】
危険予測手段102は、移動体検出手段101と有機的に関連して立体物と自車との衝突が発生するかどうかの危険を予測する。まず、自車が交差点の右折待ちのために停止している状態を初期状態とし、その時刻から右折を開始した場合の時刻と位置を計算する。例えば、0.1秒毎に5秒後まで位置を0秒の時の位置を原点とし、0秒の時の自車が向いている方向をy軸にとり2次元座標として計算する。この時、舵角や速度の変化はある一定のパターンを与えておいても良いし、普段から右折時の舵角や速度の変化を記録しておき、この変化のパターンを平均化して用いても良いし、カメラで交差点の形状を認識して自車の現在位置と交差する道路の車線に円弧を当てはめて軌跡を予測しても良い。一方で、移動体検出手段101で抽出した立体物の5秒後までの軌跡を0.1秒毎に予測する。移動体検出手段101では立体物の今までの軌跡が記録してあるので、この軌跡を外挿補間すれば良い。最も単純な方法としては、現在のフレームと一つ前のフレームで求めた相対位置を線形補間することにより立体物の進行方向を2次元のベクトルとして求め、現在の立体物の位置にこの2次元ベクトルを複数回加算することによりフレーム間隔時間での軌跡が予測できる。このフレーム間隔時間で求めた位置を、さらに線形補間して0.1秒間隔の位置に修正しておく。そして、自車と立体物の0.1秒毎に求めた予測軌跡に対して、それぞれの0.1秒毎の時刻に対してこれらの位置のユーグリット距離を計算する
。このユーグリット距離がある閾値(例えば、車両1台分で約4m)より短い場合があった場合に衝突する危険の可能性があると予測する。
【0028】
一方、機器動作状態検知手段103は、例えば、ウインカーの動作状態を検出する。これは単純にウインカーのスイッチが右になっているかどうかを検出すれば良い。また、ウインカーの動作状態を検出する代わりに、例えば、ナビゲーションの右左折案内の動作状態を検出するようにしても良い。
【0029】
機器動作状態報知手段104は、例えば、図2のように構成する。図2において、第1動作確認音データ格納手段202と第2動作確認音データ格納手段203は、不揮発の半導体メモリで構成し、ウインカーが動作していることをドライバーに伝えるための動作確認のための音データを格納しておく。この時、第1動作確認音データ格納手段202と第2動作確認音データ格納手段203には異なった音を格納しておく。例えば、第1動作確認音データ格納手段202には、ウインカーの一回の点滅に同期した「カッ チ」というような機械式のリレーの動作音を模擬する音(第1動作確認音)を格納しておく。一方、第2動作確認音データ格納手段203には、同様にウインカーの一回の点滅に同期した「カッ」というような音(第2動作確認音)を格納しておく。出力音データ選別手段204では、危険予測結果と機器動作状態検知結果に従って、報知するかどうかと報知する音を選択する。その選択のアルゴリズムを図3に示す。図3では危険予測結果として安全と危険の2種類を出力する場合を例にして示している。報知する内容は、次のとおりである。機器が動作中で安全と予測した場合には第1動作確認音を報知し、一方機器が動作中で危険と予測した場合には第2動作確認音を報知する。機器が停止中の場合には何も選択せずに報知しないように制御する。危険予測結果として2種類以上の状態を予測し、その結果を報知する場合には動作確認音を格納する手段をその数に応じて増やせば良い。
【0030】
音量制御手段205は、電子化された音データをD/Aコンバータでアナログに変換した後にパワーアンプを用いてゲインを増幅する。
【0031】
スピーカ206は、音量制御手段205から出力されるアナログ信号を音として出力する。
【0032】
上記説明では、ウインカーの動作確認音を電子的な制御によって変更するように説明したが、ウインカーの点滅を切り替えるリレーの動作音がそのまま動作確認音になっている場合には、このリレーに新たにもう一つの端子を設け、この端子に危険状態を入力することにより動作音が変わるようにしても良いし、リレーの動作音に重畳する音だけを別途出力するようにして、ドライバーがその違いを知覚できるようにしても良い。例えば、同じリレーをもう一つ用意し、危険予測の結果に応じてこの追加したリレーが動作するようにするとともに、この追加したリレーの動作に0.2秒程度の遅れをつけて動作させれば、ウインカーの1回の点滅に対して「カッ チ」という音と「カッカッ チチ」という音を区別して報知できるので、ドライバーはその違いを知覚できる。
【0033】
なお、本実施の形態1では、ウインカーの動作確認音として機械式のリレーの動作音を模擬した音を例に説明したが、動作確認音としてはドライバーが煩わしさを感じない効果音であれば何でも良い。例えば、ウインカーの1回の点滅に同期して「イッケ」と「ダッメ」とそれぞれ発声している音声を素材としてこれに機械的な声質に変換して、これらを効果音として危険を予測した結果に従って切り替えて報知しても良い。
【0034】
また、本実施の形態1では、ウインカーの動作状態を検知し、ウインカーの動作確認音を変更する場合について説明したが、ハイブリット車で発進可能状態であることをドライバーに確認させるためのエンジン音を模擬した動作確認音を変更するようにしても良い。
また、機器動作状態報知手段は、専用の手段として説明したが、車のオーディオやカーナビゲーションにあるスピーカやアンプなどの音響機器と併用して構成することも可能である。さらに、機器動作状態報知手段は、MDプレーヤやラジオなどの音量を変更するようにして構成することも可能であり、この場合は危険な状態では音量を小さくすることにより、余計な警報音を放置しないでドライバーに危険な状態や安全な状態を伝えるようにしても良い。
【0035】
また、本実施の形態1では、右折時の危険判断を行う例について説明したが、本発明は、右折時の危険予測での報知に限定されるものでないことはいうまでもない。例えば、単路走行時の追突の危険や、交差点左折時の歩行者を巻き込む危険など、従来から事故の危険を予測し、危険な場合に警報を報知している全ての場合に適用することが可能である。この時は機器の動作確認音として前記のハイブリット車で発進可能状態であることをドライバーに確認させるためのエンジン音を模擬した動作確認音などを用いれば良い。
【0036】
さらに、危険予測手段が危険な状態の種類を判別し、その危険な状態の種類に応じて機器の動作確認音の出力方法を変更し、危険の種類をドライバーに伝えることも可能である。例えば、自車の右側に危険な状態がある場合には車室内の右側のスピーカから動作確認音を出力し、反対に自車の左側に危険な状態がある場合には車室内の左側のスピーカから動作確認音を出力することも可能である。また、危険な状態を伝えるために動作確認音をそれぞれ用意することも可能である。例えば、交差点での左折時に危険予測手段が歩行者を巻き込む危険を予測した場合には、ウインカーの1回の点滅に合わせた動作確認音として「ヒト」と発声している音声を素材にこれに機械的な声質に変換して動作確認音として用いる。このようにすれば、ドライバーには危険な状態としての対象が人間であることを伝えることができる。
【0037】
以上のように、本実施の形態1によれば、危険予測手段102の危険予測結果と機器動作状態検出手段103の機器動作状態検知結果を機器動作状態報知手段104に入力することにより、車室内の機器の動作状況を知らせる動作確認音を、危険を予測した結果に従って変更することが可能となり、普段から車室内にある音を用いて走行に関する危険および安全に関する情報をドライバーに確実に報知することができるとともに、余計な警報によるドライバーに対する煩わしさを軽減することができる。例えば、交差点で右折待ちをしている場合で、対向車両が連続して交差点に進入しているときは右折が危険な状態と予測されるが、このときも常にウインカーの動作確認音として異なった音が出力されているだけであるので、ドライバーに対する煩わしさを大幅に軽減できるとともに、右折可能となった場合にドライバーがその状況を把握していても、ウインカーの動作音が変わるだけであるので、余計な報知音が出力されることによるドライバーの感じる煩わしさを大幅に軽減できる。
【0038】
(実施の形態2)
図4は、本発明の実施の形態2における安全走行支援装置を構成するブロック図である。図4において、図1と同じ構成要素の移動体検出手段と危険予測手段については同じ符号を用い、その説明を省略する。
【0039】
図4における騒音抑圧手段403の構成を図5に示す。騒音抑圧手段403は、マイク501と逆位相音生成手段502と抑圧量調整手段503とスピーカ504で構成している。
【0040】
マイク501は、騒音を収音するためのマイクであり、車室外から最も騒音が多く車室内に入ってくる位置に配置する。
【0041】
スピーカ504は、ドライバーの耳付近に配置し、騒音をキャンセルする音を出力させる。騒音をキャンセルする音は逆位相音生成手段502で生成する。例えば、マイク501で収音した騒音に対して符号を反転し、スピーカ504からドライバーの耳までの音の伝達時間と、マイク501からドライバーの耳までの音の伝達時間とを考慮して遅れ時間を加えて逆位相音を生成する。
【0042】
抑圧量調整手段503は、危険予測の結果に応じて騒音の抑圧量を調整する。例えば、危険予測の結果が危険と安全の2種類の場合、安全と予測されたときは抑圧量が最大になるようにし、危険と予測されたときは抑圧量を最低にする。
【0043】
なお、本実施の形態2では、マイクが一つの場合を例にして説明したが、マイクを複数用いてドライバーの耳付近の騒音を推定して逆位相の音を生成しても良い、また、スピーカも左右の耳付近に2個以上配置して左右の耳毎に逆位相の音を再生するようにしても良い、騒音抑圧の基本的な方法としては上記の例に限定するものではない。
【0044】
なお、本実施の形態2では、騒音を抑圧する方法として電子的な方法を用いた場合について説明したが、車両の窓ガラスを少し開閉する方法を用いて騒音抑圧手段403を構成しても、車室内に入ってくる車室外の騒音の大きさを変更でき、この騒音の違いをドライバーに知覚させることにより同様の効果を得ることができる。
【0045】
以上のように、本実施の形態2によれば、危険予測手段102の危険予測結果に応じて騒音抑圧手段403の動作状態を変更することがきるので、危険を予測した結果に従ってドライバーに聞こえる車室外の騒音の大きさを変更することが可能となり、走行に関する危険および安全に関する情報をドライバーに伝えることができるとともに、余計な警報によるドライバーに対する煩わしさを軽減することができる。
【産業上の利用可能性】
【0046】
本発明にかかる安全走行支援装置は、危険を予測した場合にドライバーにその危険を確実に報知することができるとともに、余計な報知音が出力されることによるドライバーへの煩わしさを軽減することができるという効果を有し、危険状態を予測した場合および安全状態と予測した場合に報知する装置などとして有用である。
【図面の簡単な説明】
【0047】
【図1】本発明の実施の形態1における安全走行支援装置の構成を示すブロック図
【図2】本発明の実施の形態1における機器動作状態報知手段の構成を示すブロック図
【図3】本発明の実施の形態1における出力音データ選別手段のデータ選別を示す図
【図4】本発明の実施の形態2における安全走行支援装置の構成を示すブロック図
【図5】本発明の実施の形態2における騒音抑圧手段の構成を示すブロック図
【図6】従来の安全走行支援装置の構成を示すブロック図
【図7】従来の安全走行支援装置を説明するための図
【符号の説明】
【0048】
101 移動体検出手段
102 危険予測手段
103 機器動作状態検知手段
104 機器動作状態報知手段
202 第1動作確認音データ格納手段
203 第2動作確認音データ格納手段
204 出力音データ選別手段
205 音量制御手段
206 スピーカ
403 騒音抑圧手段
501 マイク
502 逆位相音生成手段
503 抑圧量調整手段
504 スピーカ
【特許請求の範囲】
【請求項1】
車両に搭載される安全走行支援装置であって、
移動体を検出する移動体検出手段と、
前記移動体検出手段で検出した移動体と自車との間で危険が発生するかどうかを予測する危険予測手段と、
車両に搭載された機器の動作状態を検知する機器動作状態検知手段と、
前記機器動作状態検知手段で検知した前記機器の動作状態を報知音で案内する機器動作状態報知手段とを備え、
前記危険予測手段の危険予測結果に応じて、前記機器動作状態報知手段の報知音を変更する安全走行支援装置。
【請求項2】
前記機器がウインカーまたはナビゲーションであり、
前記機器動作状態検知手段は、前記ウインカーの動作状態または前記ナビゲーションの右左折案内の動作状態を検知し、
前記機器動作状態検知手段の検知結果に応じて、前記機器動作状態報知手段が前記ウインカーの動作確認音を変更する請求項1に記載の安全走行支援装置。
【請求項3】
前記機器動作状態検知手段は、車両が走行可能状態であるかどうか検知し、
前記機器動作状態検知手段の検知結果に応じて、前記機器動作状態報知手段が車両の走行可能状態の確認音を変更する請求項1に記載の安全走行支援装置。
【請求項4】
前記危険予測手段が危険の種類を判別し、前記機器動作状態報知手段が危険の種類によって前記機器の動作確認音を変更する請求項1に記載の安全走行支援装置。
【請求項5】
車両に搭載される安全走行支援装置であって、
移動体を検出する移動体検出手段と、
前記移動体検出手段で検出した物体と自車との間で危険が発生するかどうかを予測する危険予測手段と、
車室内またはドライバーの耳近辺の走行ノイズまたは車室外の騒音を抑制する騒音抑圧手段とを備え、
前記危険予測手段の危険予測結果に応じて、前記騒音抑圧手段の動作状態を変更する安全走行支援装置。
【請求項1】
車両に搭載される安全走行支援装置であって、
移動体を検出する移動体検出手段と、
前記移動体検出手段で検出した移動体と自車との間で危険が発生するかどうかを予測する危険予測手段と、
車両に搭載された機器の動作状態を検知する機器動作状態検知手段と、
前記機器動作状態検知手段で検知した前記機器の動作状態を報知音で案内する機器動作状態報知手段とを備え、
前記危険予測手段の危険予測結果に応じて、前記機器動作状態報知手段の報知音を変更する安全走行支援装置。
【請求項2】
前記機器がウインカーまたはナビゲーションであり、
前記機器動作状態検知手段は、前記ウインカーの動作状態または前記ナビゲーションの右左折案内の動作状態を検知し、
前記機器動作状態検知手段の検知結果に応じて、前記機器動作状態報知手段が前記ウインカーの動作確認音を変更する請求項1に記載の安全走行支援装置。
【請求項3】
前記機器動作状態検知手段は、車両が走行可能状態であるかどうか検知し、
前記機器動作状態検知手段の検知結果に応じて、前記機器動作状態報知手段が車両の走行可能状態の確認音を変更する請求項1に記載の安全走行支援装置。
【請求項4】
前記危険予測手段が危険の種類を判別し、前記機器動作状態報知手段が危険の種類によって前記機器の動作確認音を変更する請求項1に記載の安全走行支援装置。
【請求項5】
車両に搭載される安全走行支援装置であって、
移動体を検出する移動体検出手段と、
前記移動体検出手段で検出した物体と自車との間で危険が発生するかどうかを予測する危険予測手段と、
車室内またはドライバーの耳近辺の走行ノイズまたは車室外の騒音を抑制する騒音抑圧手段とを備え、
前記危険予測手段の危険予測結果に応じて、前記騒音抑圧手段の動作状態を変更する安全走行支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2007−133732(P2007−133732A)
【公開日】平成19年5月31日(2007.5.31)
【国際特許分類】
【出願番号】特願2005−327206(P2005−327206)
【出願日】平成17年11月11日(2005.11.11)
【出願人】(000005821)松下電器産業株式会社 (73,050)
【Fターム(参考)】
【公開日】平成19年5月31日(2007.5.31)
【国際特許分類】
【出願日】平成17年11月11日(2005.11.11)
【出願人】(000005821)松下電器産業株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]