
安全運転支援システム、車載機、および、車載機に用いるプログラム
【課題】交差点の手前の道路上の特定の停止線を車両が越えると、交差点進入に対する注意喚起のための処理を終了する(サービスアウトする)安全運転支援システムにおいて、ドライバにとって必要な注意喚起の報知を受けられなくなってしまう可能性を低減する。
【解決手段】車両用ナビゲーション装置は、受信した安全運転支援情報に含まれる停止線位置情報に基づいて、光ビーコンから最も近くに位置する最近停止線位置と最も遠くに位置する最遠停止線位置を特定し、車両の現在位置から最近停止線位置までの走行所要時間が規定時間以内になったこと等に基づいて、車両4のドライバに、赤信号警報のための報知を行い(ステップ220)、また、待ち時間表示を行うための処理を行う(ステップ230)。そして、車両が最遠停止線を越えたことに基づいて、サービスアウトして待ち時間表示を行うための処理を終了する。
【解決手段】車両用ナビゲーション装置は、受信した安全運転支援情報に含まれる停止線位置情報に基づいて、光ビーコンから最も近くに位置する最近停止線位置と最も遠くに位置する最遠停止線位置を特定し、車両の現在位置から最近停止線位置までの走行所要時間が規定時間以内になったこと等に基づいて、車両4のドライバに、赤信号警報のための報知を行い(ステップ220)、また、待ち時間表示を行うための処理を行う(ステップ230)。そして、車両が最遠停止線を越えたことに基づいて、サービスアウトして待ち時間表示を行うための処理を終了する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、安全運転支援システム、車載機、および、車載機に用いるプログラムに関するものである。
【背景技術】
【0002】
従来、交差点の手前の車両の安全運転を支援するために、交差点手前の停止線から車両までの距離が基準距離以内となったことに基づいて、交差点進入に対する注意喚起の報知をドライバに対して行う安全運転支援システムが知られている。
【0003】
例えば、2010年から実用化される警察庁の安全運転支援システムであるDSSS(Driving Safety Support Systems)では、道路上に設置された路側送信機の近くを車両が通過するときに、路側送信機が車両に対して停止線の位置情報を送信し、車両に搭載された車載機は、送信された停止線の位置情報を取得し、取得した位置情報に基づいて車両から停止線までの距離を算出し、算出した距離が所定距離以下になったことに基づいて、注意喚起の報知(例えば、赤信号見落とし警告)をドライバに対して行うようになっている。
【0004】
ここで、路側送信機から送信される停止線の位置情報は、車線毎の停止線の位置情報となっている。これは、車線毎に停止線の位置が異なる場合があるからである。車載機は、路側送信機から別途送信される車線位置情報に基づいて、自車両の走行車線を特定できるようになっているが、路側送信機は停止線よりも手前(例えば300メートル手前)にあるので、路側送信機を通過してから停止線に到達するまでに走行車線が変化する可能性もある。
【0005】
したがって、路側送信機通過時点の走行車線を特定し、その車線上にある停止線の位置情報に基づいたタイミングで注意喚起を行うのでは、その後走行車線が変化して、注意喚起のタイミングが実際に必要なタイミングよりも遅れてしまう可能性がある。
【0006】
この問題への対策として、車両の走行車線に関わらず、複数の車線の停止線のうち、路側送信機の設置位置から道路に沿って最も近い(すなわち、交差点から最も離れた)停止線に基づいて注意喚起を行う車載機が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2001−188991号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、発明者の検討によれば、上記のように、路側送信機の設置位置から最も近い停止線に基づいて注意喚起を行うと、問題が発生する場合がある。
【0009】
これは、安全運転支援システムには、車両から停止線までの距離が基準距離以内となって以降も、車両が停止線を越えるまでは、必要に応じて交差点進入に対する注意喚起の報知(例えば、赤信号の待ち時間の表示)を行い、車両が停止線を越えた時点で、交差点進入に対する注意喚起のための処理を終了する(サービスアウトする)安全運転支援システムもあるからである。
【0010】
このような、路側送信機の設置位置から最も近い停止線を車両が越えるとサービスアウトする安全運転支援システムでは、車両が実際にはその停止線がある車線を走行してない場合、車両が走行車線の停止線を越える前にサービスアウトが発生してしまい、ドライバにとって必要な注意喚起の報知を受けられなくなってしまう可能性がある。
【0011】
本発明は上記点に鑑み、交差点の手前の道路上の特定の停止線を車両が越えると、交差点進入に対する注意喚起のための処理を終了する(サービスアウトする)安全運転支援システムにおいて、ドライバにとって必要な注意喚起の報知を受けられなくなってしまう可能性を低減することを目的とする。
【課題を解決するための手段】
【0012】
上記目的を達成するための請求項1に記載の発明は、交差点(1)の手前の道路(2)上に設置され、前記道路(2)を走行する車両(4)に安全運転支援情報を送信する路側送信機(3a〜3c)と、前記車両(4)に搭載され、前記路側送信機(3a〜3c)から送信された前記安全運転支援情報を受信する車載機(5)と、を備えた安全運転支援システムであって、前記路側送信機(3a〜3c)は、前記車両(4)に送信する前記安全運転支援情報に、前記道路(2)上の走行車線(2a〜2c)毎の、前記交差点(1)に対する停止線(6a〜6c)の位置を示す停止線位置情報と、前記交差点(1)に設置された信号機の表示内容を示す信号機表示情報と、を含め、前記車載機(5)は、受信した前記安全運転支援情報に含まれる前記停止線位置情報に基づいて、前記路側送信機(3a〜3c)から最も近くに位置する最近停止線の位置と、前記路側送信機(3a〜3c)から最も遠くに位置する最遠停止線の位置を特定する最近・最遠停止線位置特定手段(145)と、前記車両(4)の現在位置から前記最近停止線の位置までの走行所要時間が規定時間以内になったことに基づいて、前記車両(4)のドライバに、交差点進入に対する注意喚起のための報知を行う第1の報知手段(220)と、交差点進入に対する注意喚起のための、前記第1の報知手段(220)とは異なる報知を行うための処理を行う第2の報知手段(230)と、前記車両(4)が前記最遠停止線を越えたことに基づいて、前記第2の報知手段(230)の処理を終了するサービスアウト手段(240)と、を有することを特徴とする安全運転支援システムである。
【0013】
このようになっていることで、車載機(5)は、車両(4)が最近停止線(換言すれば、交差点から最も遠い停止線)から規定時間以下の位置に到達したタイミングで交差点進入に対する注意喚起のための報知を行うので、車両(4)がどの車線を走行していたとしても、注意喚起のための報知が遅れてしまうことがない。その上、車両(4)が最遠停止線(換言すれば、交差点に最も近い停止線)を越えたタイミングでサービスアウトするので、車両(4)がどの車線を走行していたとしても、サービスアウトのタイミングが早すぎた結果ドライバにとって必要な注意喚起の報知を受けられなくなってしまうことがなくなる。
【0014】
また、請求項2に記載の発明は、交差点(1)の手前の道路(2)上に設置されて安全運転支援情報を送信する路側送信機(3a〜3c)から、前記安全運転支援情報を受信する車載機であって、前記安全運転支援情報には、前記道路(2)上の走行車線(2a〜2c)毎の、前記交差点(1)に対する停止線(6a〜6c)の位置を示す停止線位置情報と、前記交差点(1)に設置された信号機の表示内容を示す信号機表示情報と、が含まれており、当該車載機は、受信した前記安全運転支援情報に含まれる前記停止線位置情報に基づいて、前記路側送信機(3a〜3c)から最も近くに位置する最近停止線の位置と、前記路側送信機(3a〜3c)から最も遠くに位置する最遠停止線の位置を特定する最近・最遠停止線位置特定手段(145)と、前記車両(4)の現在位置から前記最近停止線の位置までの走行所要時間が規定時間以内になったことに基づいて、前記車両(4)のドライバに、交差点進入に対する注意喚起のための報知を行う第1の報知手段(220)と、交差点進入に対する注意喚起のための、前記第1の報知手段(220)とは異なる報知を行うための処理を行う第2の報知手段(230)と、前記車両(4)が前記最遠停止線を越えたことに基づいて、前記第2の報知手段(230)の処理を終了するサービスアウト手段(240)と、を有することを特徴とする車載機である。このように、請求項1に係る発明の特徴は、車載機の発明として捉えることもできる。
【0015】
また、請求項3に記載の発明は、交差点(1)の手前の道路(2)上に設置されて安全運転支援情報を送信する路側送信機(3a〜3c)から、前記安全運転支援情報を受信する車載機(5)に用いるプログラムであって、前記安全運転支援情報には、前記道路(2)上の走行車線(2a〜2c)毎の、前記交差点(1)に対する停止線(6a〜6c)の位置を示す停止線位置情報と、前記交差点(1)に設置された信号機の表示内容を示す信号機表示情報と、が含まれており、当該プログラムは、受信した前記安全運転支援情報に含まれる前記停止線位置情報に基づいて、前記路側送信機(3a〜3c)から最も近くに位置する最近停止線の位置と、前記路側送信機(3a〜3c)から最も遠くに位置する最遠停止線の位置を特定する最近・最遠停止線位置特定手段(145)、前記車両(4)の現在位置から前記最近停止線の位置までの走行所要時間が規定時間以内になったことに基づいて、前記車両(4)のドライバに、交差点進入に対する注意喚起のための報知を行う第1の報知手段(220)、交差点進入に対する注意喚起のための、前記第1の報知手段(220)とは異なる報知を行うための処理を行う第2の報知手段(230)、および
前記車両(4)が前記最遠停止線を越えたことに基づいて、前記第2の報知手段(230)の処理を終了するサービスアウト手段(240)として、前記車載機(5)が有する制御回路(17)を、機能させることを特徴とするプログラムである。このように、請求項1に係る発明の特徴は、車載機(5)に用いるプログラムの発明として捉えることもできる。
【0016】
また、請求項4に記載の発明は、交差点(1)の手前の道路(2)上に設置され、前記道路(2)を走行する車両(4)に安全運転支援情報を送信する路側送信機(3a〜3c)と、前記車両(4)に搭載され、前記路側送信機(3a〜3c)から送信された前記安全運転支援情報を受信する車載機(5)と、を備えた安全運転支援システムであって、前記路側送信機(3a〜3c)は、前記車両(4)に送信する前記安全運転支援情報に、前記道路(2)上の走行車線(2a〜2c)毎の、前記交差点(1)に対する停止線(6a〜6c)の位置を示す停止線位置情報と、前記交差点(1)に設置された信号機の表示内容を示す信号機表示情報と、前記車両(4)が走行している車線を示す車線通知情報と、を含め、前記車載機(5)は、受信した前記安全運転支援情報に含まれる前記車線通知情報に示された車線を、前記安全運転支援情報の受信時における前記車両(4)の走行車線(以下、初期走行車線という)として特定する初期走行車線特定手段(150)と、前記初期走行車線特定手段(150)が前記初期走行車線を特定した後、前記車両(4)の前記初期走行車線からの車線変更履歴に基づいて、前記車両(4)の走行車線を逐次特定する走行車線更新手段(215)と、前記車両(4)の現在位置から、前記走行車線更新手段(215)が特定した最新の走行車線上の停止線の位置までの走行所要時間が、規定時間以内になったことに基づいて、前記車両(4)のドライバに、交差点進入に対する注意喚起のための報知を行う第1の報知手段(220’)と、交差点進入に対する注意喚起のための、前記第1の報知手段(220’)とは異なる報知を行うための処理を行う第2の報知手段(230)と、前記車線更新手段(215)が特定した最新の走行車線上の停止線を前記車両(4)が越えたことに基づいて、前記第2の報知手段(230)の処理を終了するサービスアウト手段(240’)と、を有することを特徴とする安全運転支援システムである。
【0017】
このようになっていることで、車載機(5)は、逐次更新される車両(4)の走行車線上の停止線から基準距離以下の位置に到達したタイミングで交差点進入に対する注意喚起のための報知を行うので、車両(4)がどの車線を走行していたとしても、注意喚起のための報知が遅れてしまうことがない。その上、逐次更新される車両(4)の走行車線上の停止線を車両(4)が越えたタイミングでサービスアウトするので、車両(4)がどの車線を走行していたとしても、サービスアウトのタイミングが早すぎた結果ドライバにとって必要な注意喚起の報知を受けられなくなってしまうことがなくなる。
【0018】
また、請求項5に記載の発明は、交差点(1)の手前の道路(2)上に設置されて安全運転支援情報を送信する路側送信機(3a〜3c)から、前記安全運転支援情報を受信する車載機であって、前記安全運転支援情報には、前記道路(2)上の走行車線(2a〜2c)毎の、前記交差点(1)に対する停止線(6a〜6c)の位置を示す停止線位置情報と、前記交差点(1)に設置された信号機の表示内容を示す信号機表示情報と、前記車両(4)が走行している車線を示す車線通知情報と、が含まれており、当該車載機は、受信した前記安全運転支援情報に含まれる前記車線通知情報に示された車線を、前記安全運転支援情報の受信時における前記車両(4)の走行車線(以下、初期走行車線という)として特定する初期走行車線特定手段(150)と、前記初期走行車線特定手段(150)が前記初期走行車線を特定した後、前記車両(4)の前記初期走行車線からの車線変更履歴に基づいて、前記車両(4)の走行車線を逐次特定する走行車線更新手段(215)と、前記車両(4)の現在位置から、前記走行車線更新手段(215)が特定した最新の走行車線上の停止線の位置までの走行所要時間が、規定時間以内になったことに基づいて、前記車両(4)のドライバに、交差点進入に対する注意喚起のための報知を行う第1の報知手段(220’)と、交差点進入に対する注意喚起のための、前記第1の報知手段(220’)とは異なる報知を行うための処理を行う第2の報知手段(230)と、前記車線更新手段(215)が特定した最新の走行車線上の停止線を前記車両(4)が越えたことに基づいて、前記第2の報知手段(230)の処理を終了するサービスアウト手段(240’)と、を有することを特徴とする車載機である。このように、請求項4に係る発明の特徴は、車載機の発明として捉えることもできる。
【0019】
また、請求項6に記載の発明は、交差点(1)の手前の道路(2)上に設置されて安全運転支援情報を送信する路側送信機(3a〜3c)から、前記安全運転支援情報を受信する車載機(5)に用いるプログラムであって、前記安全運転支援情報には、前記道路(2)上の走行車線(2a〜2c)毎の、前記交差点(1)に対する停止線(6a〜6c)の位置を示す停止線位置情報と、前記交差点(1)に設置された信号機の表示内容を示す信号機表示情報と、前記車両(4)が走行している車線を示す車線通知情報と、が含まれており、当該プログラムは、受信した前記安全運転支援情報に含まれる前記車線通知情報に示された車線を、前記安全運転支援情報の受信時における前記車両(4)の走行車線(以下、初期走行車線という)として特定する初期走行車線特定手段(150)、前記初期走行車線特定手段(150)が前記初期走行車線を特定した後、前記車両(4)の前記初期走行車線からの車線変更履歴に基づいて、前記車両(4)の走行車線を逐次特定する走行車線更新手段(215)、前記車両(4)の現在位置から、前記走行車線更新手段(215)が特定した最新の走行車線上の停止線の位置までの走行所要時間が、規定時間以内になったことに基づいて、前記車両(4)のドライバに、交差点進入に対する注意喚起のための報知を行う第1の報知手段(220’)、交差点進入に対する注意喚起のための、前記第1の報知手段(220’)とは異なる報知を行うための処理を行う第2の報知手段(230)、および前記車線更新手段(215)が特定した最新の走行車線上の停止線を前記車両(4)が越えたことに基づいて、前記第2の報知手段(230)の処理を終了するサービスアウト手段(240’)として、前記車載機(5)が有する制御回路(17)を機能させるプログラムである。このように、請求項4に係る発明の特徴は、車載機に用いるプログラムの発明として捉えることもできる。
【0020】
なお、上記および特許請求の範囲における括弧内の符号は、特許請求の範囲に記載された用語と後述の実施形態に記載される当該用語を例示する具体物等との対応関係を示すものである。
【図面の簡単な説明】
【0021】
【図1】本発明の実施形態に係る安全運転支援システムの構成を示す模式図である。
【図2】車両用ナビゲーション装置5の構成図である。
【図3】第1実施形態における最近・最遠停止線位置特定処理のフローチャートである。
【図4】第1実施形態におけるサービス処理のフローチャートである。
【図5】第2実施形態における初期走行車線特定処理のフローチャートである。
【図6】第2実施形態におけるサービス処理のフローチャートである。
【発明を実施するための形態】
【0022】
(第1実施形態)
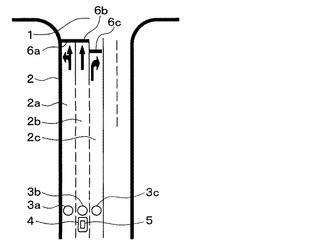
以下、本発明の第1実施形態について説明する。図1に、本実施形態に係る安全運転支援システムの模式図を示す。この図においては、交差点1の手前に、交差点1に進入するための進入道路2があり、その進入道路2は、複数の進入車線2a〜2cから構成されている。
【0023】
各進入車線2a〜2c上には、交差点1から所定距離(例えば、200mから500mまでの間の特定の距離、典型的には300m)だけ手前の位置に、光ビーコン3a〜3c(それぞれが路側送信機の一例に相当する)が設置されている。光ビーコン3a〜3cと進入車線2a〜2cとは1対1に対応しており、各光ビーコン3a〜3cから交差点1までの道路2の線形に沿った距離は、同じとなっている。光ビーコン3a〜3cのより具体的な設置位置としては、例えば、光ビーコン3a〜3cのそれぞれが、進入車線2a〜2cのうち、対応する進入車線の真上にあってもよい。
【0024】
これら光ビーコン3a〜3cは、近赤外線を用いて、通信エリア内の車両4に搭載された車両用ナビゲーション装置5(車載機の一例に相当する)と双方向通信を行う。これら光ビーコン3a〜3cのそれぞれの通信可能エリアは、当該光ビーコンに対応する進入車線にのみ限定され、かつ、当該進入車線においても、当該光ビーコンの近傍(例えば、5メートル以内の近傍)に限定される。したがって、例えば、光ビーコン3bは、車両4が進入車線2bを通って光ビーコン3bの近傍を通過したときのみ、当該車両4に搭載された車両用ナビゲーション装置5と通信可能になる。
【0025】
このような光ビーコン3a〜3cとしては、例えば、DSSS(Driving Safety Support Systems)に用いる光ビーコン投光器を用いることができる。
【0026】
本実施形態の安全運転支援システムは、これら光ビーコン3a〜3c、および、光ビーコン3a〜3cのいずれかと通信する車両用ナビゲーション装置5を含んでいる。
【0027】
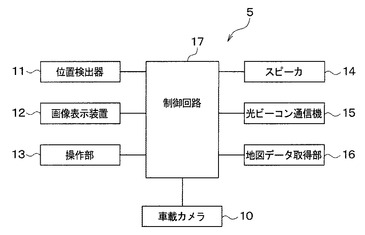
図2に、この車両用ナビゲーション装置5のハードウェア構成を示す。この車両用ナビゲーション装置5は、車両に搭載され、車載カメラ10、位置検出器11、画像表示装置12、操作部13、スピーカ14、光ビーコン受信機15、地図データ取得部16、および制御回路17を有している。
【0028】
車載カメラ10は、車両4に取り付けられ、車両4の前方の道路を所定の周期で(例えば1秒に60回)撮影し、撮影結果の撮影画像を制御回路17に出力する装置である。
【0029】
位置検出器11は、いずれも周知の図示しない自律航法用のセンサ(加速度センサ、地磁気センサ、ジャイロセンサ、車速センサ等)および衛星航法用のセンサ(GPS受信機等)を有しており、これらセンサの各々の性質に基づいた、車両の現在位置、向き、および速度を特定するための情報を制御回路17に出力する。画像表示装置12は、制御回路17から出力された映像信号に基づいた映像をユーザに表示する。操作部13は、ユーザの操作を受け付けるボタン等の部材である。
【0030】
光ビーコン受信機15は、光ビーコン3a〜3cと通信するための周知の装置であり、送信用の発光素子であるLEDを含む送信処理部と、フォトダイオードを含む受信処理部とを有している。この光ビーコン受信機15は、光ビーコン3a〜3cと通信し易い位置、例えば、通常車両のダッシュボード上に設置してもよい。
【0031】
地図データ取得部16は、DVD、CD、HDD等の不揮発性の記憶媒体およびそれら記憶媒体に対してデータの読み出し(および可能ならば書き込み)を行う装置から成る。当該記憶媒体は、制御回路17が実行するプログラム、経路案内用の地図データ等を記憶している。
【0032】
制御回路(コンピュータに相当する)17は、CPU、RAM、ROM、I/O等を有するマイコンである。CPUは、ROMまたは地図データ取得部16から読み出した車両用ナビゲーション装置5の動作のためのプログラムを実行し、その実行の際にはRAM、ROM、および地図データ取得部16から情報を読み出し、RAMおよび(可能であれば)地図データ取得部16の記憶媒体に対して情報の書き込みを行い、位置検出器11、画像表示装置12、操作部13、スピーカ14、および光ビーコン受信機15と信号の授受を行う。
【0033】
制御回路17がプログラムを実行することによって行う具体的な処理としては、現在位置特定処理、地図表示処理、ナビゲーション処理、安全運転支援処理等がある。
【0034】
現在位置特定処理は、位置検出器11からの信号に基づいて、周知のマップマッチング等の技術を用いて車両の現在位置や向きを特定する処理である。地図表示処理は、車両の現在位置の周辺等の特定の領域の地図を、画像表示装置12に表示させる処理である。この際、地図表示のために用いる情報は、地図データから取得する。ナビゲーション処理は、操作部13からユーザによる目的地の入力を受け付け、現在位置から当該目的地までの最適な誘導経路を算出し、算出された誘導経路に沿った走行案内を行う処理である。
【0035】
安全運転支援処理は、交差点の手前の車両の安全運転を支援するために、交差点進入に対する注意喚起の報知をドライバに対して行うための処理である。
【0036】
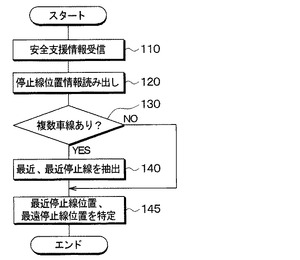
図3および図4に、安全運転支援処理のフローチャートを示す。安全運転支援処理は、図3に示す最近・最遠停止線位置特定処理、および、図4に示すサービス処理から成る。
【0037】
制御回路17は、車両4の走行開始と共に安全運転支援処理を開始し、まず図3の最近・最遠停止線位置特定処理を実行し、その実行の終了後、図4のサービス処理を実行する。
【0038】
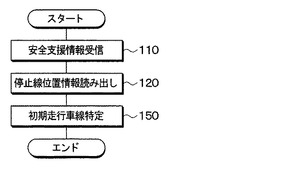
まず最近・最遠停止線位置特定処理において制御回路17は、ステップ110で、光ビーコン3a〜3cのいずれかと通信して安全支援情報を受信するまで待ち、受信したらステップ120に進む。
【0039】
車両用ナビゲーション装置5と光ビーコン3a〜3cとの通信の手順は、以下のようになっている。まず、車両用ナビゲーション装置5が光ビーコン3a〜3cのいずれかの通信エリアに入ると、制御回路17が光ビーコン受信機15を介して当該光ビーコンから常時送信される正常な所定の情報を受信し、受信したことに基づいて、当該光ビーコンに対して自車両のID(例えば、制御回路17のROMに記録されている)を含むアップリンクを当該光ビーコンに送信する。すると、当該光ビーコンは、アップリンクの応答として、上記IDを宛先とする安全支援情報を送信する。そして制御回路17は、光ビーコン受信機15を介して当該IDを宛先とする安全支援情報を受信する。
【0040】
光ビーコン3a〜3cのそれぞれは、送信する安全運転支援情報に、サービス情報、道路線形情報、停止線位置情報、信号機表示情報、車線通知情報等を含めるようになっている。
【0041】
サービス情報は、光ビーコン3a〜3cがどのようなサービスを提供しているかを示す情報である。本実施形態では、光ビーコン3a〜3cが赤信号警報サービス、待ち時間表示サービスを提供しているので、サービス情報には、赤信号警報サービスおよび待ち時間表示サービスを提供している旨の情報を含める。このサービス情報は、光ビーコン3a〜3cのそれぞれが有する記憶媒体にあらかじめ記録されている。
【0042】
道路線形情報は、道路2の線形(道路の中心線の形状)を表すデータである。この道路線形情報は、光ビーコン3a〜3cのそれぞれが有する記憶媒体にあらかじめ記録されている。
【0043】
停止線位置情報は、進入道路2上の進入車線2a〜2c毎の、交差点1への進入直前の交差点1に対する停止線6a〜6c(図1参照)の位置を示す情報である。これら停止線6a〜6cは、各進入車線2a〜2c上に白線等で表示されている。
【0044】
ある進入車線に対応する光ビーコンから、当該進入車線に表示される停止線の位置までの道路2の線形に沿った距離は、図1に示すように、同じである場合もあれば、同じでない場合もある。典型的には、最も右側の車線2cの停止線6cの位置は、他の停止線6a、6bよりも交差点1から遠いので、光ビーコン3cから停止線6cまでの道路2の線形に沿った距離も、一番長い。
【0045】
より詳しくは、停止線位置情報は、進入車線2a〜2cと1対1に対応する複数のレコードから成り、各レコードは、当該レコードに対応する進入車線2x(xはa〜cのいずれか)に対応する光ビーコン3xから、当該進入車線2xに表示される停止線6xまでの、道路2の線形に沿った距離の情報を含んでいる。この停止線位置情報は、光ビーコン3a〜3cのそれぞれが有する記憶媒体にあらかじめ記録されている。
【0046】
信号機情報は、交差点1に設置され、進入道路2から交差点1に進入する車両に対して進入可否を表示する信号機の表示内容を示す情報である。ここで、信号機の表示内容としては、現時点の信号機の表示内容(赤信号、青信号、黄信号)に加え、次以降の表示内容切り替わりタイミングまでの時間、および次以降の表示内容(赤信号、青信号、黄信号)を含んでいる。この信号機情報は、あらかじめ光ビーコン3a〜3cのそれぞれが有する記憶媒体に記憶された当該信号機の表示内容変化のスケジュールに基づいて光ビーコン3a〜3cが算出するようになっていてもよいし、当該信号機から光ビーコン3a〜3cに送信されるようになっていてもよい。
【0047】
車線通知情報は、車両が走行している車線を示す情報である。具体的には、ある進入車線2x(xはa〜cのいずれか)に対応する光ビーコン3xは、当該進入車線2xを示す情報を、車線通知情報として送信する。光ビーコン3xが送信する安全運転支援情報は、進入車線2xを通る車両しか受信できないので、この車線通知情報は、送信先の車両が走行している車線を示す情報である。
【0048】
このような安全運転支援情報としては、DSSSの光ビーコン投光器が送信するDSSS情報を採用してもよい。
【0049】
制御回路17は、安全運転支援情報を受信すると、続いてステップ120で、受信した安全運転支援情報から停止線位置情報を読み出し、続いてステップ130で、読み出した停止線位置情報中のレコードの数に基づいて、車両4が走行している進入道路2が複数の進入車線を有しているか否かを判定する。
【0050】
複数の進入車線を有している場合、続いてステップ140で、読み出した停止線位置情報から、対応する光ビーコンから道路2の線形に沿って最も近くに位置する最近停止線と、対応する光ビーコンから道路2の線形に沿って最も遠く位置する最遠停止線を抽出する。図1の例では、最近停止線は停止線6cであり、最遠停止線は停止線6a、6bである。
【0051】
そしてステップ145では、最近停止線位置および最遠停止線位置を特定する。ステップ140に続いてステップ145を実行する場合は、ステップ140で抽出した最近停止線の位置を最近停止線位置とし、ステップ140で抽出した最遠停止線の位置を最遠停止線位置とする。また、ステップ130で車線が1つしかないと判定した場合は、ステップ140を経ずにステップ145で、停止線位置情報に基づいて、当該1つの車線における停止線の位置を、最近停止線位置および最遠停止線位置とする。ステップ145の後、図3の最近・最遠停止線位置特定処理を終了し、引き続きすぐに、図4のサービス処理を開始する。
【0052】
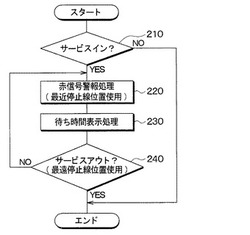
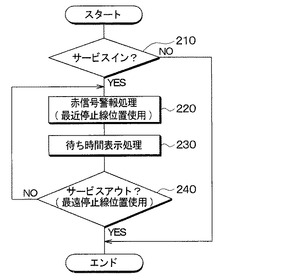
サービス処理においては、まずステップ210で、サービスインするか否かを判定する。サービスインしないと判定した場合は、サービス処理を終了すると共に、所定時間(例えば5秒)待機した後、再度図3の最近・最遠停止線位置特定処理を開始することで、次の交差点における安全運転支援のために待機する。
【0053】
サービスインするか否かの判定は、直前の図3のステップ110で受信した安全運転支援情報中のサービス情報に基づいて行う。具体的には、当該サービス情報中に、赤信号警報サービスおよび待ち時間表示サービスを提供している旨の情報が含まれていれば、サービスインすると判定し、それらの情報が含まれていない場合(例えば、追い越し警報サービスを提供している旨の情報等の他の情報のみが含まれている場合)、サービスインしないと判定する。
【0054】
また、当該サービス情報中に、赤信号警報サービスおよび待ち時間表示サービスを提供している旨の情報が含まれている場合でも、車両4の車速が基準範囲(例えば、時速30km〜80km)を逸脱している場合は、サービスインしないと判定してもよい。同様に、自車位置から最近停止線までの道路2の線形に沿った距離が非常に大きい(例えば、1km以上)場合には、サービスインしないと判定してもよい。
【0055】
サービスインすると判定した場合は、ステップ220以降を実行する。具体的には、ステップ240でサービスアウトすると判定するまでは、ステップ220、230、240の処理を、所定の周期(例えば0.1秒に1回)で繰り返す。
【0056】
ステップ220では、赤信号警報サービスのための処理を行う。具体的には、以下の条件1〜3が満たされるか否かを判定し、それら条件1〜3のすべてが満たされれば、画像表示装置12およびスピーカ14を制御して、文字と音声で、交差点1に進入できない旨の警告報知(交差点進入に対する注意喚起の報知の一例に相当する)を行わせ、条件1〜3の1つでも満たされなければ、そのままステップ220を終了する。
【0057】
条件1〜3は、以下のようなものである。
(条件1)車両4が減速中でない。
(条件2)車両4の現在位置から最近停止線位置までの走行所要時間が規定時間T(例えば5秒)以下である。
(条件3)車両4が最近停止線に到達する予定の時刻に、進入道路2から交差点1に進入する車両に対して進入可否を表示する信号機の表示内容が、進入不可(赤信号または黄信号)を示している。
【0058】
ここで、車両4が減速中か否かは、車速の現在の変化率に基づいて判定する。また、車両4の現在位置から最近停止線までの走行所要時間は、現在の車速、現在の車両4の位置、および最近停止線の位置情報を用いて算出する。また、条件3については、現在時刻、上述の走行所要時間、および、直前の図3のステップ110で受信した安全運転支援情報中の信号機表示情報に基づいて判定する。
【0059】
続いてステップ230では、待ち時間表示サービスのための処理を行う。具体的には、現在、進入道路2から交差点1に進入する車両に対して進入可否を表示する信号機の現在の表示内容が進入不可(赤信号または黄信号)の場合に、次に当該信号機の表示内容が進入可(青信号)となるまでの待ち時間を、画像表示装置12に表示させる処理である。待ち時間の表示も、ドライバに走行再開までの時間を前もって通知することで、ドライバが焦ったり、青信号になったことに気付かなかったりする可能性を低減できるので、交差点進入に対する注意喚起の報知の一例に相当する。なお、この待ち時間は、直前の図3のステップ110で受信した安全運転支援情報中の信号機表示情報に基づいて算出することができる。
【0060】
続いてステップ240では、サービスアウトするか否かを判定する。サービスアウトするか否かは、車両4の現在位置が、直前の図3のステップ145で特定した最遠停止線位置を越えたか否か(すなわち、車両4が光ビーコンの位置から最遠停止線位置までの道路2の線形に沿った距離だけ走行したか否か)で判定する。つまり、車両4が最遠停止線位置を越えるまでは、サービスアウトせず、越えた時点で、サービスアウトする。
【0061】
サービスアウトした場合は、ステップ220、230、240の繰り返し処理を終了し、サービス処理を終了すると共に、所定時間(例えば5秒)待機した後、再度図3の最近・最遠停止線位置特定処理を開始することで、次の交差点における安全運転支援のために待機する。
【0062】
このようなサービス処理による典型的な作動としては、以下のようなものがある。制御回路17がサービスインするとステップ210で判定した後、車両4が交差点1に近づいていく。
【0063】
このとき、上記信号機の表示内容は赤信号で、あと1分以上青信号に切り替わらないとする。その場合、制御回路17は、ステップ230を繰り返すことで、青信号に切り替わるまでの待ち時間の表示を、画像表示装置12において逐次更新していく。
【0064】
また同じ場合、もし車両4のドライバが赤信号に気付かずに、車両4を減速させないままでいると、上述の条件2が満たされる程度まで車両4が最近停止線に近づいた時点で、ステップ220において、交差点1に進入できない旨の警告報知が行われる。
【0065】
警告報知が行われるのは、車両4がどの進入車線2a〜2cを通っているか、どの光ビーコン3a〜3cと通信したかに無関係である。したがって、進入車線2bを通って光ビーコン3bと通信し、その後進入車線2bを走行し続けている場合はもとより、進入車線2bを通って光ビーコン3bと通信し、その後進入車線2bから進入車線2cに車線変更した場合も、警告報知が遅れるということはない。
【0066】
この警告報知によって赤信号に気付いたドライバが、車両4の先端を停止線6a〜6cのいずれかの位置に合わせて車両4を安全に停止させたとする。この場合、また上記信号機の表示は赤のままなので、ステップ230の繰り返し処理により、待ち時間の表示は継続している。
【0067】
ステップ240でサービスアウトするのは、車両4が最遠停止線を越えた場合なので、車両4が停止線6a〜6cのうちどの停止線に合わせて車両4を停止させていたとしても、サービスアウトすることはなく、ドライバにとって必要な待ち時間の表示が継続される。そして、当該信号の表示が青信号になると、車両4は走行を再開し、車両4が最遠停止線を越えることで、ステップ240でサービスアウトと判定される。
【0068】
このように、車両用ナビゲーション装置5の制御回路17は、受信した安全運転支援情報に含まれる停止線位置情報に基づいて、光ビーコン3a〜3cから最も近くに位置する最近停止線位置と、光ビーコン3a〜3cから最も遠くに位置する最遠停止線位置を特定し(ステップ145)、車両4の現在位置から最近停止線位置までの走行所要時間が規定時間以内になったこと等に基づいて、車両4のドライバに、赤信号警報のための報知を行い(ステップ220)、また、交差点進入に対する注意喚起のための、上記警報とは異なる注意喚起として、待ち時間表示を行うための処理を行う(ステップ230)。そして、車両4が最遠停止線を越えたことに基づいて、サービスアウトして待ち時間表示を行うための処理を終了する。
【0069】
このように、車両用ナビゲーション装置5は、車両4が最近停止線(換言すれば、交差点から最も遠い停止線)まで規定時間以下の位置に到達したタイミングで赤信号警報のための報知を行うので、車両4がどの車線を走行していたとしても、注意喚起のための報知が遅れてしまうことがない。その上、車両4が最遠停止線(換言すれば、交差点に最も近い停止線)を越えたタイミングでサービスアウトするので、車両4がどの車線を走行していたとしても、サービスアウトのタイミングが早すぎた結果ドライバにとって必要な待ち時間表示を受けられなくなってしまうことがなくなる。
【0070】
なお、本実施形態においては、制御回路17が、ステップ145を実行することで最近・最遠停止線位置特定手段の一例として機能し、ステップ220を実行することで第1の報知手段の一例として機能し、ステップ230を実行することで第2の報知手段の一例として機能し、ステップ240を実行することでサービスアウト手段の一例として機能する。
【0071】
(第2実施形態)
次に、本発明の第2実施形態について説明する。本実施形態が第1実施形態と異なるのは、本実施形態では、第1実施形態の最近停止線および最遠停止線を、光ビーコン3a〜3cを通過後も逐次更新される車両4の最新の走行車線上の停止線の位置に置き換えている点である。以下、本実施形態が第1実施形態と異なる点を中心に説明する。
【0072】
本実施形態の安全運転支援システムの構成は、第1実施形態と同じである。また、本実施形態の作動が第1実施形態と異なるのは、車両用ナビゲーション装置5の制御回路17が、図3の最近・最遠停止線位置特定処理に替えて図5の初期走行車線特定処理を実行する点、および、図4のサービス処理に替えて図6のサービス処理を実行する点である。
【0073】
以下、図5の初期走行車線特定処理および図6のサービス処理について説明する。ただし、図3と図5で同じステップ番号が付されたステップは、処理内容が同じであるので、その詳細な説明は省略する。また同様に、図4と図6で同じステップ番号が付されたステップは、処理内容が同じであるので、その詳細な説明は省略する。
【0074】
まず、図5の初期走行車線特定処理においては、ステップ110で安全運転支援情報を光ビーコン3a〜3cのいずれかから受信し、ステップ120で当該安全運転支援情報から停止線位置情報を読み出す。
【0075】
そして続いてステップ150で、初期走行車線を特定する。具体的には、受信した上記安全運転支援情報に含まれる車線通知情報に示された車線、すなわち、光ビーコン3a〜3cから安全運転支援情報を受信した時点における車両4の走行車線を、初期走行車線として特定する。ステップ150に続いては、すぐに図6のサービス処理を実行する。
【0076】
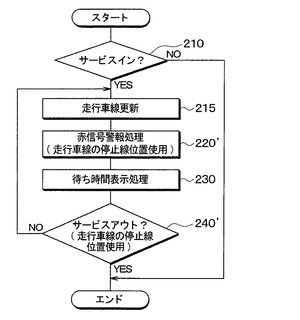
図6のサービス処理では、ステップ210でサービスインすると判定した場合、続いて、ステップ240’でサービスアウトすると判定するまで、ステップ215〜ステップ240’の処理を周期的に(例えば、0.1秒に1回)繰り返す。
【0077】
まずステップ215では、車両4の走行車線の情報を最新のものに更新する。具体的には、車両4の初期走行車線からの車線変更履歴に基づいて、車両4の現在の走行車線を特定する。車両4がどのように車線変更したかの履歴(すなわち、車線変更履歴)は、車載カメラ10から得た撮影画像から、周知の白線検知技術で車線を区切る白線を抽出し、その白線の経時的な移動の内容に基づいて、車線変更の方向および回数を制御回路17のRAMに記録することで、作成することができる。
【0078】
例えば、白線が撮影画像の中央左よりから中央右よりに移動した場合、車両4が左に1車線移動したと判定し、白線が撮影画像の中央右よりから中央左よりに移動した場合、車両4が右に1車線移動したと判定する。
【0079】
例えば、初期走行車線が進入車線2aであり、その後車両4が右に2車線移動し、左に1車線移動したという車線変更履歴が記録されれば、車両4の現在の走行車線は、進入車線2bということになる。
【0080】
続いてステップ220’では、赤信号警報サービスのための処理を行う。この処理内容は、一点を除いて、図4のステップ220と同じである。その一点とは、図4のステップ220における最近停止線位置を、車両4の最新の走行車線上の停止線の位置(直前のステップ215で更新済み)に置き換える点である。
【0081】
続いてステップ230では、待ち時間表示サービスのための処理を行った後、ステップ240’では、サービスアウトするか否かを判定する。この処理内容は、一点を除いて、図4のステップ240と同じである。その一点とは、図4のステップ240における最遠停止線位置を、車両4の最新の走行車線上の停止線の位置(直前のステップ215で更新済み)に置き換える点である。
【0082】
このようなサービス処理による典型的な作動としては、以下のようなものがある。制御回路17がサービスインするとステップ210で判定した後、車両4が交差点1に近づいていく。このとき制御回路17は、ステップ240’でサービスアウトすると判定するまでは、ステップ215を繰り返し実行することで、車両4の初期走行車線からの車線変更履歴を作成し、その履歴に基づいて、車両4の走行車線を逐次特定する。
【0083】
このとき、上記信号機の表示内容は赤信号で、あと1分以上青信号に切り替わらないとする。その場合、制御回路17は、ステップ230を繰り返すことで、青信号に切り替わるまでの待ち時間の表示を、画像表示装置12において逐次更新していく。
【0084】
また同じ場合、もし車両4のドライバが赤信号に気付かずに、車両4を減速させないままでいると、上述の条件2が満たされる程度まで車両4が最近停止線に近づいた時点で、ステップ220’において、交差点1に進入できない旨の警告報知が行われる。
【0085】
警告報知が行われるタイミングは、ステップ220’の判定の時点で車両4がどの進入車線にいるかによって異なる。例えば、他の条件が同じならば、車両4が進入車線2cを走行している場合の方が、他の場合よりも、警告報知のタイミングが遅くなる。
【0086】
したがって、車両がどの光ビーコン3a〜3cと通信したかに関わりなく、現在の車両4の走行車線に対応した停止線の位置を使って警告報知のタイミングを決定するので、警告報知のタイミングを適切にすることができる。例えば、警告報知が早すぎて、ドライバに違和感を与えることもなく、逆に警告報知が遅すぎることもない。
【0087】
この警告報知によって赤信号に気付いたドライバが、車両4の先端を停止線6a〜6cのいずれかの位置に合わせて車両4を安全に停止させたとする。この場合、また上記信号機の表示は赤のままなので、ステップ230の繰り返し処理により、待ち時間の表示は継続している。
【0088】
ステップ240’でサービスアウトするのは、車両4が現に停止している車線の停止線を越えた場合なので、車両4が停止線6a〜6cのうちどの停止線に合わせて車両4を停止させていたとしても、サービスアウトすることはなく、ドライバにとって必要な待ち時間の表示が継続される。そして、当該信号の表示が青信号になると、車両4は走行を再開し、車両4が最遠停止線を越えることで、ステップ240でサービスアウトと判定される。
【0089】
このように、車両用ナビゲーション装置5の制御回路17は、受信した安全運転支援情報に含まれる車線通知情報に示された車線を、初期走行車線として特定し(ステップ150)、初期走行車線を特定した後、車両4の初期走行車線からの車線変更履歴に基づいて、車両4の走行車線を逐次特定し(ステップ215)と、車両4の現在位置から、ステップ215で特定した最新の走行車線上の停止線の位置までの走行所要時間が、規定時間以内になったことに基づいて、車両4のドライバに、赤信号警報のための報知を行い(ステップ220’)、交差点進入に対する注意喚起のための、待ち時間表示のための処理を行う(ステップ230)。そして、ステップ215で特定した最新の走行車線上の停止線を車両4が越えたことに基づいて、待ち時間表示のための処理を終了する(ステップ240’)。
【0090】
このようになっていることで、車両用ナビゲーション装置5は、逐次更新される車両4の走行車線上の停止線から基準距離以下の位置に到達したタイミングで赤信号警報のための報知を行うので、車両4がどの車線を走行していたとしても、報知が遅れてしまうことがない。その上、逐次更新される車両4の走行車線上の停止線を車両4が越えたタイミングでサービスアウトするので、車両4がどの車線を走行していたとしても、サービスアウトのタイミングが早すぎた結果ドライバにとって必要な待ち時間表示を受けられなくなってしまうことがなくなる。
【0091】
なお、本実施形態においては、制御回路17が、ステップ145を実行することで最近・最遠停止線位置特定手段の一例として機能し、ステップ220またはステップ220’を実行することで第1の報知手段の一例として機能し、ステップ230を実行することで第2の報知手段の一例として機能し、ステップ240またはステップ240’を実行することでサービスアウト手段の一例として機能する。
【0092】
(他の実施形態)
以上、本発明の実施形態について説明したが、本発明の範囲は、上記実施形態のみに限定されるものではなく、本発明の各発明特定事項の機能を実現し得る種々の形態を包含するものである。
【0093】
例えば、上記実施形態においては、路側送信機の一例として光ビーコンを用いて説明を行ったが、路側送信機としては、光ビーコンに限らず、交差点の手前の道路上に設置され、当該道路を走行する車両に安全運転支援情報を送信するようなものであれば、どのようなものであってもよい。
【0094】
また、上記実施形態においては、車載機の一例として車両用ナビゲーション装置5を用いて説明を行ったが、車載機としては、車両用ナビゲーション装置5に限らず、車両4に搭載され、路側送信機から送信された安全運転支援情報を受信するようなものならば、どのようなものであってもよい。
【0095】
また、上記実施形態において、第1の報知手段として、ステップ220、220’を実行する制御回路17が例示されているが、第1の報知手段を実現するための処理としては、赤信号警告のための処理に限らず、車両の現在位置から最近停止線(または最新の車両の走行車線上の停止線)の位置までの走行所要時間が規定時間以内になったことに基づいて、車両4のドライバに、交差点進入に対する注意喚起のための報知を行う処理であれば、どのようなものであってもよい。
【0096】
また、上記実施形態において、第2の報知手段として、ステップ230を実行する制御回路17が例示されているが、第2の報知手段を実現するための処理としては、待ち時間表示処理に限らず、交差点進入に対する注意喚起のための、第1の報知手段とは異なる報知を行うための処理であり、サービスアウト処理によって終了するものであれば、どのような処理であってもよい。
【0097】
また、上記の実施形態において、制御回路17がプログラムを実行することで実現している各機能は、それらの機能を有するハードウェア(例えば回路構成をプログラムすることが可能なFPGA)を用いて実現するようになっていてもよい。
【符号の説明】
【0098】
1 交差点
2 進入道路
2a〜2c 進入車線
3a〜3c 光ビーコン
4 車両
5 車両用ナビゲーション装置
6a〜6c 停止線
10 車載カメラ
11 位置検出器
12 画像表示装置
15 光ビーコン信機
17 制御回路
【技術分野】
【0001】
本発明は、安全運転支援システム、車載機、および、車載機に用いるプログラムに関するものである。
【背景技術】
【0002】
従来、交差点の手前の車両の安全運転を支援するために、交差点手前の停止線から車両までの距離が基準距離以内となったことに基づいて、交差点進入に対する注意喚起の報知をドライバに対して行う安全運転支援システムが知られている。
【0003】
例えば、2010年から実用化される警察庁の安全運転支援システムであるDSSS(Driving Safety Support Systems)では、道路上に設置された路側送信機の近くを車両が通過するときに、路側送信機が車両に対して停止線の位置情報を送信し、車両に搭載された車載機は、送信された停止線の位置情報を取得し、取得した位置情報に基づいて車両から停止線までの距離を算出し、算出した距離が所定距離以下になったことに基づいて、注意喚起の報知(例えば、赤信号見落とし警告)をドライバに対して行うようになっている。
【0004】
ここで、路側送信機から送信される停止線の位置情報は、車線毎の停止線の位置情報となっている。これは、車線毎に停止線の位置が異なる場合があるからである。車載機は、路側送信機から別途送信される車線位置情報に基づいて、自車両の走行車線を特定できるようになっているが、路側送信機は停止線よりも手前(例えば300メートル手前)にあるので、路側送信機を通過してから停止線に到達するまでに走行車線が変化する可能性もある。
【0005】
したがって、路側送信機通過時点の走行車線を特定し、その車線上にある停止線の位置情報に基づいたタイミングで注意喚起を行うのでは、その後走行車線が変化して、注意喚起のタイミングが実際に必要なタイミングよりも遅れてしまう可能性がある。
【0006】
この問題への対策として、車両の走行車線に関わらず、複数の車線の停止線のうち、路側送信機の設置位置から道路に沿って最も近い(すなわち、交差点から最も離れた)停止線に基づいて注意喚起を行う車載機が提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開2001−188991号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかし、発明者の検討によれば、上記のように、路側送信機の設置位置から最も近い停止線に基づいて注意喚起を行うと、問題が発生する場合がある。
【0009】
これは、安全運転支援システムには、車両から停止線までの距離が基準距離以内となって以降も、車両が停止線を越えるまでは、必要に応じて交差点進入に対する注意喚起の報知(例えば、赤信号の待ち時間の表示)を行い、車両が停止線を越えた時点で、交差点進入に対する注意喚起のための処理を終了する(サービスアウトする)安全運転支援システムもあるからである。
【0010】
このような、路側送信機の設置位置から最も近い停止線を車両が越えるとサービスアウトする安全運転支援システムでは、車両が実際にはその停止線がある車線を走行してない場合、車両が走行車線の停止線を越える前にサービスアウトが発生してしまい、ドライバにとって必要な注意喚起の報知を受けられなくなってしまう可能性がある。
【0011】
本発明は上記点に鑑み、交差点の手前の道路上の特定の停止線を車両が越えると、交差点進入に対する注意喚起のための処理を終了する(サービスアウトする)安全運転支援システムにおいて、ドライバにとって必要な注意喚起の報知を受けられなくなってしまう可能性を低減することを目的とする。
【課題を解決するための手段】
【0012】
上記目的を達成するための請求項1に記載の発明は、交差点(1)の手前の道路(2)上に設置され、前記道路(2)を走行する車両(4)に安全運転支援情報を送信する路側送信機(3a〜3c)と、前記車両(4)に搭載され、前記路側送信機(3a〜3c)から送信された前記安全運転支援情報を受信する車載機(5)と、を備えた安全運転支援システムであって、前記路側送信機(3a〜3c)は、前記車両(4)に送信する前記安全運転支援情報に、前記道路(2)上の走行車線(2a〜2c)毎の、前記交差点(1)に対する停止線(6a〜6c)の位置を示す停止線位置情報と、前記交差点(1)に設置された信号機の表示内容を示す信号機表示情報と、を含め、前記車載機(5)は、受信した前記安全運転支援情報に含まれる前記停止線位置情報に基づいて、前記路側送信機(3a〜3c)から最も近くに位置する最近停止線の位置と、前記路側送信機(3a〜3c)から最も遠くに位置する最遠停止線の位置を特定する最近・最遠停止線位置特定手段(145)と、前記車両(4)の現在位置から前記最近停止線の位置までの走行所要時間が規定時間以内になったことに基づいて、前記車両(4)のドライバに、交差点進入に対する注意喚起のための報知を行う第1の報知手段(220)と、交差点進入に対する注意喚起のための、前記第1の報知手段(220)とは異なる報知を行うための処理を行う第2の報知手段(230)と、前記車両(4)が前記最遠停止線を越えたことに基づいて、前記第2の報知手段(230)の処理を終了するサービスアウト手段(240)と、を有することを特徴とする安全運転支援システムである。
【0013】
このようになっていることで、車載機(5)は、車両(4)が最近停止線(換言すれば、交差点から最も遠い停止線)から規定時間以下の位置に到達したタイミングで交差点進入に対する注意喚起のための報知を行うので、車両(4)がどの車線を走行していたとしても、注意喚起のための報知が遅れてしまうことがない。その上、車両(4)が最遠停止線(換言すれば、交差点に最も近い停止線)を越えたタイミングでサービスアウトするので、車両(4)がどの車線を走行していたとしても、サービスアウトのタイミングが早すぎた結果ドライバにとって必要な注意喚起の報知を受けられなくなってしまうことがなくなる。
【0014】
また、請求項2に記載の発明は、交差点(1)の手前の道路(2)上に設置されて安全運転支援情報を送信する路側送信機(3a〜3c)から、前記安全運転支援情報を受信する車載機であって、前記安全運転支援情報には、前記道路(2)上の走行車線(2a〜2c)毎の、前記交差点(1)に対する停止線(6a〜6c)の位置を示す停止線位置情報と、前記交差点(1)に設置された信号機の表示内容を示す信号機表示情報と、が含まれており、当該車載機は、受信した前記安全運転支援情報に含まれる前記停止線位置情報に基づいて、前記路側送信機(3a〜3c)から最も近くに位置する最近停止線の位置と、前記路側送信機(3a〜3c)から最も遠くに位置する最遠停止線の位置を特定する最近・最遠停止線位置特定手段(145)と、前記車両(4)の現在位置から前記最近停止線の位置までの走行所要時間が規定時間以内になったことに基づいて、前記車両(4)のドライバに、交差点進入に対する注意喚起のための報知を行う第1の報知手段(220)と、交差点進入に対する注意喚起のための、前記第1の報知手段(220)とは異なる報知を行うための処理を行う第2の報知手段(230)と、前記車両(4)が前記最遠停止線を越えたことに基づいて、前記第2の報知手段(230)の処理を終了するサービスアウト手段(240)と、を有することを特徴とする車載機である。このように、請求項1に係る発明の特徴は、車載機の発明として捉えることもできる。
【0015】
また、請求項3に記載の発明は、交差点(1)の手前の道路(2)上に設置されて安全運転支援情報を送信する路側送信機(3a〜3c)から、前記安全運転支援情報を受信する車載機(5)に用いるプログラムであって、前記安全運転支援情報には、前記道路(2)上の走行車線(2a〜2c)毎の、前記交差点(1)に対する停止線(6a〜6c)の位置を示す停止線位置情報と、前記交差点(1)に設置された信号機の表示内容を示す信号機表示情報と、が含まれており、当該プログラムは、受信した前記安全運転支援情報に含まれる前記停止線位置情報に基づいて、前記路側送信機(3a〜3c)から最も近くに位置する最近停止線の位置と、前記路側送信機(3a〜3c)から最も遠くに位置する最遠停止線の位置を特定する最近・最遠停止線位置特定手段(145)、前記車両(4)の現在位置から前記最近停止線の位置までの走行所要時間が規定時間以内になったことに基づいて、前記車両(4)のドライバに、交差点進入に対する注意喚起のための報知を行う第1の報知手段(220)、交差点進入に対する注意喚起のための、前記第1の報知手段(220)とは異なる報知を行うための処理を行う第2の報知手段(230)、および
前記車両(4)が前記最遠停止線を越えたことに基づいて、前記第2の報知手段(230)の処理を終了するサービスアウト手段(240)として、前記車載機(5)が有する制御回路(17)を、機能させることを特徴とするプログラムである。このように、請求項1に係る発明の特徴は、車載機(5)に用いるプログラムの発明として捉えることもできる。
【0016】
また、請求項4に記載の発明は、交差点(1)の手前の道路(2)上に設置され、前記道路(2)を走行する車両(4)に安全運転支援情報を送信する路側送信機(3a〜3c)と、前記車両(4)に搭載され、前記路側送信機(3a〜3c)から送信された前記安全運転支援情報を受信する車載機(5)と、を備えた安全運転支援システムであって、前記路側送信機(3a〜3c)は、前記車両(4)に送信する前記安全運転支援情報に、前記道路(2)上の走行車線(2a〜2c)毎の、前記交差点(1)に対する停止線(6a〜6c)の位置を示す停止線位置情報と、前記交差点(1)に設置された信号機の表示内容を示す信号機表示情報と、前記車両(4)が走行している車線を示す車線通知情報と、を含め、前記車載機(5)は、受信した前記安全運転支援情報に含まれる前記車線通知情報に示された車線を、前記安全運転支援情報の受信時における前記車両(4)の走行車線(以下、初期走行車線という)として特定する初期走行車線特定手段(150)と、前記初期走行車線特定手段(150)が前記初期走行車線を特定した後、前記車両(4)の前記初期走行車線からの車線変更履歴に基づいて、前記車両(4)の走行車線を逐次特定する走行車線更新手段(215)と、前記車両(4)の現在位置から、前記走行車線更新手段(215)が特定した最新の走行車線上の停止線の位置までの走行所要時間が、規定時間以内になったことに基づいて、前記車両(4)のドライバに、交差点進入に対する注意喚起のための報知を行う第1の報知手段(220’)と、交差点進入に対する注意喚起のための、前記第1の報知手段(220’)とは異なる報知を行うための処理を行う第2の報知手段(230)と、前記車線更新手段(215)が特定した最新の走行車線上の停止線を前記車両(4)が越えたことに基づいて、前記第2の報知手段(230)の処理を終了するサービスアウト手段(240’)と、を有することを特徴とする安全運転支援システムである。
【0017】
このようになっていることで、車載機(5)は、逐次更新される車両(4)の走行車線上の停止線から基準距離以下の位置に到達したタイミングで交差点進入に対する注意喚起のための報知を行うので、車両(4)がどの車線を走行していたとしても、注意喚起のための報知が遅れてしまうことがない。その上、逐次更新される車両(4)の走行車線上の停止線を車両(4)が越えたタイミングでサービスアウトするので、車両(4)がどの車線を走行していたとしても、サービスアウトのタイミングが早すぎた結果ドライバにとって必要な注意喚起の報知を受けられなくなってしまうことがなくなる。
【0018】
また、請求項5に記載の発明は、交差点(1)の手前の道路(2)上に設置されて安全運転支援情報を送信する路側送信機(3a〜3c)から、前記安全運転支援情報を受信する車載機であって、前記安全運転支援情報には、前記道路(2)上の走行車線(2a〜2c)毎の、前記交差点(1)に対する停止線(6a〜6c)の位置を示す停止線位置情報と、前記交差点(1)に設置された信号機の表示内容を示す信号機表示情報と、前記車両(4)が走行している車線を示す車線通知情報と、が含まれており、当該車載機は、受信した前記安全運転支援情報に含まれる前記車線通知情報に示された車線を、前記安全運転支援情報の受信時における前記車両(4)の走行車線(以下、初期走行車線という)として特定する初期走行車線特定手段(150)と、前記初期走行車線特定手段(150)が前記初期走行車線を特定した後、前記車両(4)の前記初期走行車線からの車線変更履歴に基づいて、前記車両(4)の走行車線を逐次特定する走行車線更新手段(215)と、前記車両(4)の現在位置から、前記走行車線更新手段(215)が特定した最新の走行車線上の停止線の位置までの走行所要時間が、規定時間以内になったことに基づいて、前記車両(4)のドライバに、交差点進入に対する注意喚起のための報知を行う第1の報知手段(220’)と、交差点進入に対する注意喚起のための、前記第1の報知手段(220’)とは異なる報知を行うための処理を行う第2の報知手段(230)と、前記車線更新手段(215)が特定した最新の走行車線上の停止線を前記車両(4)が越えたことに基づいて、前記第2の報知手段(230)の処理を終了するサービスアウト手段(240’)と、を有することを特徴とする車載機である。このように、請求項4に係る発明の特徴は、車載機の発明として捉えることもできる。
【0019】
また、請求項6に記載の発明は、交差点(1)の手前の道路(2)上に設置されて安全運転支援情報を送信する路側送信機(3a〜3c)から、前記安全運転支援情報を受信する車載機(5)に用いるプログラムであって、前記安全運転支援情報には、前記道路(2)上の走行車線(2a〜2c)毎の、前記交差点(1)に対する停止線(6a〜6c)の位置を示す停止線位置情報と、前記交差点(1)に設置された信号機の表示内容を示す信号機表示情報と、前記車両(4)が走行している車線を示す車線通知情報と、が含まれており、当該プログラムは、受信した前記安全運転支援情報に含まれる前記車線通知情報に示された車線を、前記安全運転支援情報の受信時における前記車両(4)の走行車線(以下、初期走行車線という)として特定する初期走行車線特定手段(150)、前記初期走行車線特定手段(150)が前記初期走行車線を特定した後、前記車両(4)の前記初期走行車線からの車線変更履歴に基づいて、前記車両(4)の走行車線を逐次特定する走行車線更新手段(215)、前記車両(4)の現在位置から、前記走行車線更新手段(215)が特定した最新の走行車線上の停止線の位置までの走行所要時間が、規定時間以内になったことに基づいて、前記車両(4)のドライバに、交差点進入に対する注意喚起のための報知を行う第1の報知手段(220’)、交差点進入に対する注意喚起のための、前記第1の報知手段(220’)とは異なる報知を行うための処理を行う第2の報知手段(230)、および前記車線更新手段(215)が特定した最新の走行車線上の停止線を前記車両(4)が越えたことに基づいて、前記第2の報知手段(230)の処理を終了するサービスアウト手段(240’)として、前記車載機(5)が有する制御回路(17)を機能させるプログラムである。このように、請求項4に係る発明の特徴は、車載機に用いるプログラムの発明として捉えることもできる。
【0020】
なお、上記および特許請求の範囲における括弧内の符号は、特許請求の範囲に記載された用語と後述の実施形態に記載される当該用語を例示する具体物等との対応関係を示すものである。
【図面の簡単な説明】
【0021】
【図1】本発明の実施形態に係る安全運転支援システムの構成を示す模式図である。
【図2】車両用ナビゲーション装置5の構成図である。
【図3】第1実施形態における最近・最遠停止線位置特定処理のフローチャートである。
【図4】第1実施形態におけるサービス処理のフローチャートである。
【図5】第2実施形態における初期走行車線特定処理のフローチャートである。
【図6】第2実施形態におけるサービス処理のフローチャートである。
【発明を実施するための形態】
【0022】
(第1実施形態)
以下、本発明の第1実施形態について説明する。図1に、本実施形態に係る安全運転支援システムの模式図を示す。この図においては、交差点1の手前に、交差点1に進入するための進入道路2があり、その進入道路2は、複数の進入車線2a〜2cから構成されている。
【0023】
各進入車線2a〜2c上には、交差点1から所定距離(例えば、200mから500mまでの間の特定の距離、典型的には300m)だけ手前の位置に、光ビーコン3a〜3c(それぞれが路側送信機の一例に相当する)が設置されている。光ビーコン3a〜3cと進入車線2a〜2cとは1対1に対応しており、各光ビーコン3a〜3cから交差点1までの道路2の線形に沿った距離は、同じとなっている。光ビーコン3a〜3cのより具体的な設置位置としては、例えば、光ビーコン3a〜3cのそれぞれが、進入車線2a〜2cのうち、対応する進入車線の真上にあってもよい。
【0024】
これら光ビーコン3a〜3cは、近赤外線を用いて、通信エリア内の車両4に搭載された車両用ナビゲーション装置5(車載機の一例に相当する)と双方向通信を行う。これら光ビーコン3a〜3cのそれぞれの通信可能エリアは、当該光ビーコンに対応する進入車線にのみ限定され、かつ、当該進入車線においても、当該光ビーコンの近傍(例えば、5メートル以内の近傍)に限定される。したがって、例えば、光ビーコン3bは、車両4が進入車線2bを通って光ビーコン3bの近傍を通過したときのみ、当該車両4に搭載された車両用ナビゲーション装置5と通信可能になる。
【0025】
このような光ビーコン3a〜3cとしては、例えば、DSSS(Driving Safety Support Systems)に用いる光ビーコン投光器を用いることができる。
【0026】
本実施形態の安全運転支援システムは、これら光ビーコン3a〜3c、および、光ビーコン3a〜3cのいずれかと通信する車両用ナビゲーション装置5を含んでいる。
【0027】
図2に、この車両用ナビゲーション装置5のハードウェア構成を示す。この車両用ナビゲーション装置5は、車両に搭載され、車載カメラ10、位置検出器11、画像表示装置12、操作部13、スピーカ14、光ビーコン受信機15、地図データ取得部16、および制御回路17を有している。
【0028】
車載カメラ10は、車両4に取り付けられ、車両4の前方の道路を所定の周期で(例えば1秒に60回)撮影し、撮影結果の撮影画像を制御回路17に出力する装置である。
【0029】
位置検出器11は、いずれも周知の図示しない自律航法用のセンサ(加速度センサ、地磁気センサ、ジャイロセンサ、車速センサ等)および衛星航法用のセンサ(GPS受信機等)を有しており、これらセンサの各々の性質に基づいた、車両の現在位置、向き、および速度を特定するための情報を制御回路17に出力する。画像表示装置12は、制御回路17から出力された映像信号に基づいた映像をユーザに表示する。操作部13は、ユーザの操作を受け付けるボタン等の部材である。
【0030】
光ビーコン受信機15は、光ビーコン3a〜3cと通信するための周知の装置であり、送信用の発光素子であるLEDを含む送信処理部と、フォトダイオードを含む受信処理部とを有している。この光ビーコン受信機15は、光ビーコン3a〜3cと通信し易い位置、例えば、通常車両のダッシュボード上に設置してもよい。
【0031】
地図データ取得部16は、DVD、CD、HDD等の不揮発性の記憶媒体およびそれら記憶媒体に対してデータの読み出し(および可能ならば書き込み)を行う装置から成る。当該記憶媒体は、制御回路17が実行するプログラム、経路案内用の地図データ等を記憶している。
【0032】
制御回路(コンピュータに相当する)17は、CPU、RAM、ROM、I/O等を有するマイコンである。CPUは、ROMまたは地図データ取得部16から読み出した車両用ナビゲーション装置5の動作のためのプログラムを実行し、その実行の際にはRAM、ROM、および地図データ取得部16から情報を読み出し、RAMおよび(可能であれば)地図データ取得部16の記憶媒体に対して情報の書き込みを行い、位置検出器11、画像表示装置12、操作部13、スピーカ14、および光ビーコン受信機15と信号の授受を行う。
【0033】
制御回路17がプログラムを実行することによって行う具体的な処理としては、現在位置特定処理、地図表示処理、ナビゲーション処理、安全運転支援処理等がある。
【0034】
現在位置特定処理は、位置検出器11からの信号に基づいて、周知のマップマッチング等の技術を用いて車両の現在位置や向きを特定する処理である。地図表示処理は、車両の現在位置の周辺等の特定の領域の地図を、画像表示装置12に表示させる処理である。この際、地図表示のために用いる情報は、地図データから取得する。ナビゲーション処理は、操作部13からユーザによる目的地の入力を受け付け、現在位置から当該目的地までの最適な誘導経路を算出し、算出された誘導経路に沿った走行案内を行う処理である。
【0035】
安全運転支援処理は、交差点の手前の車両の安全運転を支援するために、交差点進入に対する注意喚起の報知をドライバに対して行うための処理である。
【0036】
図3および図4に、安全運転支援処理のフローチャートを示す。安全運転支援処理は、図3に示す最近・最遠停止線位置特定処理、および、図4に示すサービス処理から成る。
【0037】
制御回路17は、車両4の走行開始と共に安全運転支援処理を開始し、まず図3の最近・最遠停止線位置特定処理を実行し、その実行の終了後、図4のサービス処理を実行する。
【0038】
まず最近・最遠停止線位置特定処理において制御回路17は、ステップ110で、光ビーコン3a〜3cのいずれかと通信して安全支援情報を受信するまで待ち、受信したらステップ120に進む。
【0039】
車両用ナビゲーション装置5と光ビーコン3a〜3cとの通信の手順は、以下のようになっている。まず、車両用ナビゲーション装置5が光ビーコン3a〜3cのいずれかの通信エリアに入ると、制御回路17が光ビーコン受信機15を介して当該光ビーコンから常時送信される正常な所定の情報を受信し、受信したことに基づいて、当該光ビーコンに対して自車両のID(例えば、制御回路17のROMに記録されている)を含むアップリンクを当該光ビーコンに送信する。すると、当該光ビーコンは、アップリンクの応答として、上記IDを宛先とする安全支援情報を送信する。そして制御回路17は、光ビーコン受信機15を介して当該IDを宛先とする安全支援情報を受信する。
【0040】
光ビーコン3a〜3cのそれぞれは、送信する安全運転支援情報に、サービス情報、道路線形情報、停止線位置情報、信号機表示情報、車線通知情報等を含めるようになっている。
【0041】
サービス情報は、光ビーコン3a〜3cがどのようなサービスを提供しているかを示す情報である。本実施形態では、光ビーコン3a〜3cが赤信号警報サービス、待ち時間表示サービスを提供しているので、サービス情報には、赤信号警報サービスおよび待ち時間表示サービスを提供している旨の情報を含める。このサービス情報は、光ビーコン3a〜3cのそれぞれが有する記憶媒体にあらかじめ記録されている。
【0042】
道路線形情報は、道路2の線形(道路の中心線の形状)を表すデータである。この道路線形情報は、光ビーコン3a〜3cのそれぞれが有する記憶媒体にあらかじめ記録されている。
【0043】
停止線位置情報は、進入道路2上の進入車線2a〜2c毎の、交差点1への進入直前の交差点1に対する停止線6a〜6c(図1参照)の位置を示す情報である。これら停止線6a〜6cは、各進入車線2a〜2c上に白線等で表示されている。
【0044】
ある進入車線に対応する光ビーコンから、当該進入車線に表示される停止線の位置までの道路2の線形に沿った距離は、図1に示すように、同じである場合もあれば、同じでない場合もある。典型的には、最も右側の車線2cの停止線6cの位置は、他の停止線6a、6bよりも交差点1から遠いので、光ビーコン3cから停止線6cまでの道路2の線形に沿った距離も、一番長い。
【0045】
より詳しくは、停止線位置情報は、進入車線2a〜2cと1対1に対応する複数のレコードから成り、各レコードは、当該レコードに対応する進入車線2x(xはa〜cのいずれか)に対応する光ビーコン3xから、当該進入車線2xに表示される停止線6xまでの、道路2の線形に沿った距離の情報を含んでいる。この停止線位置情報は、光ビーコン3a〜3cのそれぞれが有する記憶媒体にあらかじめ記録されている。
【0046】
信号機情報は、交差点1に設置され、進入道路2から交差点1に進入する車両に対して進入可否を表示する信号機の表示内容を示す情報である。ここで、信号機の表示内容としては、現時点の信号機の表示内容(赤信号、青信号、黄信号)に加え、次以降の表示内容切り替わりタイミングまでの時間、および次以降の表示内容(赤信号、青信号、黄信号)を含んでいる。この信号機情報は、あらかじめ光ビーコン3a〜3cのそれぞれが有する記憶媒体に記憶された当該信号機の表示内容変化のスケジュールに基づいて光ビーコン3a〜3cが算出するようになっていてもよいし、当該信号機から光ビーコン3a〜3cに送信されるようになっていてもよい。
【0047】
車線通知情報は、車両が走行している車線を示す情報である。具体的には、ある進入車線2x(xはa〜cのいずれか)に対応する光ビーコン3xは、当該進入車線2xを示す情報を、車線通知情報として送信する。光ビーコン3xが送信する安全運転支援情報は、進入車線2xを通る車両しか受信できないので、この車線通知情報は、送信先の車両が走行している車線を示す情報である。
【0048】
このような安全運転支援情報としては、DSSSの光ビーコン投光器が送信するDSSS情報を採用してもよい。
【0049】
制御回路17は、安全運転支援情報を受信すると、続いてステップ120で、受信した安全運転支援情報から停止線位置情報を読み出し、続いてステップ130で、読み出した停止線位置情報中のレコードの数に基づいて、車両4が走行している進入道路2が複数の進入車線を有しているか否かを判定する。
【0050】
複数の進入車線を有している場合、続いてステップ140で、読み出した停止線位置情報から、対応する光ビーコンから道路2の線形に沿って最も近くに位置する最近停止線と、対応する光ビーコンから道路2の線形に沿って最も遠く位置する最遠停止線を抽出する。図1の例では、最近停止線は停止線6cであり、最遠停止線は停止線6a、6bである。
【0051】
そしてステップ145では、最近停止線位置および最遠停止線位置を特定する。ステップ140に続いてステップ145を実行する場合は、ステップ140で抽出した最近停止線の位置を最近停止線位置とし、ステップ140で抽出した最遠停止線の位置を最遠停止線位置とする。また、ステップ130で車線が1つしかないと判定した場合は、ステップ140を経ずにステップ145で、停止線位置情報に基づいて、当該1つの車線における停止線の位置を、最近停止線位置および最遠停止線位置とする。ステップ145の後、図3の最近・最遠停止線位置特定処理を終了し、引き続きすぐに、図4のサービス処理を開始する。
【0052】
サービス処理においては、まずステップ210で、サービスインするか否かを判定する。サービスインしないと判定した場合は、サービス処理を終了すると共に、所定時間(例えば5秒)待機した後、再度図3の最近・最遠停止線位置特定処理を開始することで、次の交差点における安全運転支援のために待機する。
【0053】
サービスインするか否かの判定は、直前の図3のステップ110で受信した安全運転支援情報中のサービス情報に基づいて行う。具体的には、当該サービス情報中に、赤信号警報サービスおよび待ち時間表示サービスを提供している旨の情報が含まれていれば、サービスインすると判定し、それらの情報が含まれていない場合(例えば、追い越し警報サービスを提供している旨の情報等の他の情報のみが含まれている場合)、サービスインしないと判定する。
【0054】
また、当該サービス情報中に、赤信号警報サービスおよび待ち時間表示サービスを提供している旨の情報が含まれている場合でも、車両4の車速が基準範囲(例えば、時速30km〜80km)を逸脱している場合は、サービスインしないと判定してもよい。同様に、自車位置から最近停止線までの道路2の線形に沿った距離が非常に大きい(例えば、1km以上)場合には、サービスインしないと判定してもよい。
【0055】
サービスインすると判定した場合は、ステップ220以降を実行する。具体的には、ステップ240でサービスアウトすると判定するまでは、ステップ220、230、240の処理を、所定の周期(例えば0.1秒に1回)で繰り返す。
【0056】
ステップ220では、赤信号警報サービスのための処理を行う。具体的には、以下の条件1〜3が満たされるか否かを判定し、それら条件1〜3のすべてが満たされれば、画像表示装置12およびスピーカ14を制御して、文字と音声で、交差点1に進入できない旨の警告報知(交差点進入に対する注意喚起の報知の一例に相当する)を行わせ、条件1〜3の1つでも満たされなければ、そのままステップ220を終了する。
【0057】
条件1〜3は、以下のようなものである。
(条件1)車両4が減速中でない。
(条件2)車両4の現在位置から最近停止線位置までの走行所要時間が規定時間T(例えば5秒)以下である。
(条件3)車両4が最近停止線に到達する予定の時刻に、進入道路2から交差点1に進入する車両に対して進入可否を表示する信号機の表示内容が、進入不可(赤信号または黄信号)を示している。
【0058】
ここで、車両4が減速中か否かは、車速の現在の変化率に基づいて判定する。また、車両4の現在位置から最近停止線までの走行所要時間は、現在の車速、現在の車両4の位置、および最近停止線の位置情報を用いて算出する。また、条件3については、現在時刻、上述の走行所要時間、および、直前の図3のステップ110で受信した安全運転支援情報中の信号機表示情報に基づいて判定する。
【0059】
続いてステップ230では、待ち時間表示サービスのための処理を行う。具体的には、現在、進入道路2から交差点1に進入する車両に対して進入可否を表示する信号機の現在の表示内容が進入不可(赤信号または黄信号)の場合に、次に当該信号機の表示内容が進入可(青信号)となるまでの待ち時間を、画像表示装置12に表示させる処理である。待ち時間の表示も、ドライバに走行再開までの時間を前もって通知することで、ドライバが焦ったり、青信号になったことに気付かなかったりする可能性を低減できるので、交差点進入に対する注意喚起の報知の一例に相当する。なお、この待ち時間は、直前の図3のステップ110で受信した安全運転支援情報中の信号機表示情報に基づいて算出することができる。
【0060】
続いてステップ240では、サービスアウトするか否かを判定する。サービスアウトするか否かは、車両4の現在位置が、直前の図3のステップ145で特定した最遠停止線位置を越えたか否か(すなわち、車両4が光ビーコンの位置から最遠停止線位置までの道路2の線形に沿った距離だけ走行したか否か)で判定する。つまり、車両4が最遠停止線位置を越えるまでは、サービスアウトせず、越えた時点で、サービスアウトする。
【0061】
サービスアウトした場合は、ステップ220、230、240の繰り返し処理を終了し、サービス処理を終了すると共に、所定時間(例えば5秒)待機した後、再度図3の最近・最遠停止線位置特定処理を開始することで、次の交差点における安全運転支援のために待機する。
【0062】
このようなサービス処理による典型的な作動としては、以下のようなものがある。制御回路17がサービスインするとステップ210で判定した後、車両4が交差点1に近づいていく。
【0063】
このとき、上記信号機の表示内容は赤信号で、あと1分以上青信号に切り替わらないとする。その場合、制御回路17は、ステップ230を繰り返すことで、青信号に切り替わるまでの待ち時間の表示を、画像表示装置12において逐次更新していく。
【0064】
また同じ場合、もし車両4のドライバが赤信号に気付かずに、車両4を減速させないままでいると、上述の条件2が満たされる程度まで車両4が最近停止線に近づいた時点で、ステップ220において、交差点1に進入できない旨の警告報知が行われる。
【0065】
警告報知が行われるのは、車両4がどの進入車線2a〜2cを通っているか、どの光ビーコン3a〜3cと通信したかに無関係である。したがって、進入車線2bを通って光ビーコン3bと通信し、その後進入車線2bを走行し続けている場合はもとより、進入車線2bを通って光ビーコン3bと通信し、その後進入車線2bから進入車線2cに車線変更した場合も、警告報知が遅れるということはない。
【0066】
この警告報知によって赤信号に気付いたドライバが、車両4の先端を停止線6a〜6cのいずれかの位置に合わせて車両4を安全に停止させたとする。この場合、また上記信号機の表示は赤のままなので、ステップ230の繰り返し処理により、待ち時間の表示は継続している。
【0067】
ステップ240でサービスアウトするのは、車両4が最遠停止線を越えた場合なので、車両4が停止線6a〜6cのうちどの停止線に合わせて車両4を停止させていたとしても、サービスアウトすることはなく、ドライバにとって必要な待ち時間の表示が継続される。そして、当該信号の表示が青信号になると、車両4は走行を再開し、車両4が最遠停止線を越えることで、ステップ240でサービスアウトと判定される。
【0068】
このように、車両用ナビゲーション装置5の制御回路17は、受信した安全運転支援情報に含まれる停止線位置情報に基づいて、光ビーコン3a〜3cから最も近くに位置する最近停止線位置と、光ビーコン3a〜3cから最も遠くに位置する最遠停止線位置を特定し(ステップ145)、車両4の現在位置から最近停止線位置までの走行所要時間が規定時間以内になったこと等に基づいて、車両4のドライバに、赤信号警報のための報知を行い(ステップ220)、また、交差点進入に対する注意喚起のための、上記警報とは異なる注意喚起として、待ち時間表示を行うための処理を行う(ステップ230)。そして、車両4が最遠停止線を越えたことに基づいて、サービスアウトして待ち時間表示を行うための処理を終了する。
【0069】
このように、車両用ナビゲーション装置5は、車両4が最近停止線(換言すれば、交差点から最も遠い停止線)まで規定時間以下の位置に到達したタイミングで赤信号警報のための報知を行うので、車両4がどの車線を走行していたとしても、注意喚起のための報知が遅れてしまうことがない。その上、車両4が最遠停止線(換言すれば、交差点に最も近い停止線)を越えたタイミングでサービスアウトするので、車両4がどの車線を走行していたとしても、サービスアウトのタイミングが早すぎた結果ドライバにとって必要な待ち時間表示を受けられなくなってしまうことがなくなる。
【0070】
なお、本実施形態においては、制御回路17が、ステップ145を実行することで最近・最遠停止線位置特定手段の一例として機能し、ステップ220を実行することで第1の報知手段の一例として機能し、ステップ230を実行することで第2の報知手段の一例として機能し、ステップ240を実行することでサービスアウト手段の一例として機能する。
【0071】
(第2実施形態)
次に、本発明の第2実施形態について説明する。本実施形態が第1実施形態と異なるのは、本実施形態では、第1実施形態の最近停止線および最遠停止線を、光ビーコン3a〜3cを通過後も逐次更新される車両4の最新の走行車線上の停止線の位置に置き換えている点である。以下、本実施形態が第1実施形態と異なる点を中心に説明する。
【0072】
本実施形態の安全運転支援システムの構成は、第1実施形態と同じである。また、本実施形態の作動が第1実施形態と異なるのは、車両用ナビゲーション装置5の制御回路17が、図3の最近・最遠停止線位置特定処理に替えて図5の初期走行車線特定処理を実行する点、および、図4のサービス処理に替えて図6のサービス処理を実行する点である。
【0073】
以下、図5の初期走行車線特定処理および図6のサービス処理について説明する。ただし、図3と図5で同じステップ番号が付されたステップは、処理内容が同じであるので、その詳細な説明は省略する。また同様に、図4と図6で同じステップ番号が付されたステップは、処理内容が同じであるので、その詳細な説明は省略する。
【0074】
まず、図5の初期走行車線特定処理においては、ステップ110で安全運転支援情報を光ビーコン3a〜3cのいずれかから受信し、ステップ120で当該安全運転支援情報から停止線位置情報を読み出す。
【0075】
そして続いてステップ150で、初期走行車線を特定する。具体的には、受信した上記安全運転支援情報に含まれる車線通知情報に示された車線、すなわち、光ビーコン3a〜3cから安全運転支援情報を受信した時点における車両4の走行車線を、初期走行車線として特定する。ステップ150に続いては、すぐに図6のサービス処理を実行する。
【0076】
図6のサービス処理では、ステップ210でサービスインすると判定した場合、続いて、ステップ240’でサービスアウトすると判定するまで、ステップ215〜ステップ240’の処理を周期的に(例えば、0.1秒に1回)繰り返す。
【0077】
まずステップ215では、車両4の走行車線の情報を最新のものに更新する。具体的には、車両4の初期走行車線からの車線変更履歴に基づいて、車両4の現在の走行車線を特定する。車両4がどのように車線変更したかの履歴(すなわち、車線変更履歴)は、車載カメラ10から得た撮影画像から、周知の白線検知技術で車線を区切る白線を抽出し、その白線の経時的な移動の内容に基づいて、車線変更の方向および回数を制御回路17のRAMに記録することで、作成することができる。
【0078】
例えば、白線が撮影画像の中央左よりから中央右よりに移動した場合、車両4が左に1車線移動したと判定し、白線が撮影画像の中央右よりから中央左よりに移動した場合、車両4が右に1車線移動したと判定する。
【0079】
例えば、初期走行車線が進入車線2aであり、その後車両4が右に2車線移動し、左に1車線移動したという車線変更履歴が記録されれば、車両4の現在の走行車線は、進入車線2bということになる。
【0080】
続いてステップ220’では、赤信号警報サービスのための処理を行う。この処理内容は、一点を除いて、図4のステップ220と同じである。その一点とは、図4のステップ220における最近停止線位置を、車両4の最新の走行車線上の停止線の位置(直前のステップ215で更新済み)に置き換える点である。
【0081】
続いてステップ230では、待ち時間表示サービスのための処理を行った後、ステップ240’では、サービスアウトするか否かを判定する。この処理内容は、一点を除いて、図4のステップ240と同じである。その一点とは、図4のステップ240における最遠停止線位置を、車両4の最新の走行車線上の停止線の位置(直前のステップ215で更新済み)に置き換える点である。
【0082】
このようなサービス処理による典型的な作動としては、以下のようなものがある。制御回路17がサービスインするとステップ210で判定した後、車両4が交差点1に近づいていく。このとき制御回路17は、ステップ240’でサービスアウトすると判定するまでは、ステップ215を繰り返し実行することで、車両4の初期走行車線からの車線変更履歴を作成し、その履歴に基づいて、車両4の走行車線を逐次特定する。
【0083】
このとき、上記信号機の表示内容は赤信号で、あと1分以上青信号に切り替わらないとする。その場合、制御回路17は、ステップ230を繰り返すことで、青信号に切り替わるまでの待ち時間の表示を、画像表示装置12において逐次更新していく。
【0084】
また同じ場合、もし車両4のドライバが赤信号に気付かずに、車両4を減速させないままでいると、上述の条件2が満たされる程度まで車両4が最近停止線に近づいた時点で、ステップ220’において、交差点1に進入できない旨の警告報知が行われる。
【0085】
警告報知が行われるタイミングは、ステップ220’の判定の時点で車両4がどの進入車線にいるかによって異なる。例えば、他の条件が同じならば、車両4が進入車線2cを走行している場合の方が、他の場合よりも、警告報知のタイミングが遅くなる。
【0086】
したがって、車両がどの光ビーコン3a〜3cと通信したかに関わりなく、現在の車両4の走行車線に対応した停止線の位置を使って警告報知のタイミングを決定するので、警告報知のタイミングを適切にすることができる。例えば、警告報知が早すぎて、ドライバに違和感を与えることもなく、逆に警告報知が遅すぎることもない。
【0087】
この警告報知によって赤信号に気付いたドライバが、車両4の先端を停止線6a〜6cのいずれかの位置に合わせて車両4を安全に停止させたとする。この場合、また上記信号機の表示は赤のままなので、ステップ230の繰り返し処理により、待ち時間の表示は継続している。
【0088】
ステップ240’でサービスアウトするのは、車両4が現に停止している車線の停止線を越えた場合なので、車両4が停止線6a〜6cのうちどの停止線に合わせて車両4を停止させていたとしても、サービスアウトすることはなく、ドライバにとって必要な待ち時間の表示が継続される。そして、当該信号の表示が青信号になると、車両4は走行を再開し、車両4が最遠停止線を越えることで、ステップ240でサービスアウトと判定される。
【0089】
このように、車両用ナビゲーション装置5の制御回路17は、受信した安全運転支援情報に含まれる車線通知情報に示された車線を、初期走行車線として特定し(ステップ150)、初期走行車線を特定した後、車両4の初期走行車線からの車線変更履歴に基づいて、車両4の走行車線を逐次特定し(ステップ215)と、車両4の現在位置から、ステップ215で特定した最新の走行車線上の停止線の位置までの走行所要時間が、規定時間以内になったことに基づいて、車両4のドライバに、赤信号警報のための報知を行い(ステップ220’)、交差点進入に対する注意喚起のための、待ち時間表示のための処理を行う(ステップ230)。そして、ステップ215で特定した最新の走行車線上の停止線を車両4が越えたことに基づいて、待ち時間表示のための処理を終了する(ステップ240’)。
【0090】
このようになっていることで、車両用ナビゲーション装置5は、逐次更新される車両4の走行車線上の停止線から基準距離以下の位置に到達したタイミングで赤信号警報のための報知を行うので、車両4がどの車線を走行していたとしても、報知が遅れてしまうことがない。その上、逐次更新される車両4の走行車線上の停止線を車両4が越えたタイミングでサービスアウトするので、車両4がどの車線を走行していたとしても、サービスアウトのタイミングが早すぎた結果ドライバにとって必要な待ち時間表示を受けられなくなってしまうことがなくなる。
【0091】
なお、本実施形態においては、制御回路17が、ステップ145を実行することで最近・最遠停止線位置特定手段の一例として機能し、ステップ220またはステップ220’を実行することで第1の報知手段の一例として機能し、ステップ230を実行することで第2の報知手段の一例として機能し、ステップ240またはステップ240’を実行することでサービスアウト手段の一例として機能する。
【0092】
(他の実施形態)
以上、本発明の実施形態について説明したが、本発明の範囲は、上記実施形態のみに限定されるものではなく、本発明の各発明特定事項の機能を実現し得る種々の形態を包含するものである。
【0093】
例えば、上記実施形態においては、路側送信機の一例として光ビーコンを用いて説明を行ったが、路側送信機としては、光ビーコンに限らず、交差点の手前の道路上に設置され、当該道路を走行する車両に安全運転支援情報を送信するようなものであれば、どのようなものであってもよい。
【0094】
また、上記実施形態においては、車載機の一例として車両用ナビゲーション装置5を用いて説明を行ったが、車載機としては、車両用ナビゲーション装置5に限らず、車両4に搭載され、路側送信機から送信された安全運転支援情報を受信するようなものならば、どのようなものであってもよい。
【0095】
また、上記実施形態において、第1の報知手段として、ステップ220、220’を実行する制御回路17が例示されているが、第1の報知手段を実現するための処理としては、赤信号警告のための処理に限らず、車両の現在位置から最近停止線(または最新の車両の走行車線上の停止線)の位置までの走行所要時間が規定時間以内になったことに基づいて、車両4のドライバに、交差点進入に対する注意喚起のための報知を行う処理であれば、どのようなものであってもよい。
【0096】
また、上記実施形態において、第2の報知手段として、ステップ230を実行する制御回路17が例示されているが、第2の報知手段を実現するための処理としては、待ち時間表示処理に限らず、交差点進入に対する注意喚起のための、第1の報知手段とは異なる報知を行うための処理であり、サービスアウト処理によって終了するものであれば、どのような処理であってもよい。
【0097】
また、上記の実施形態において、制御回路17がプログラムを実行することで実現している各機能は、それらの機能を有するハードウェア(例えば回路構成をプログラムすることが可能なFPGA)を用いて実現するようになっていてもよい。
【符号の説明】
【0098】
1 交差点
2 進入道路
2a〜2c 進入車線
3a〜3c 光ビーコン
4 車両
5 車両用ナビゲーション装置
6a〜6c 停止線
10 車載カメラ
11 位置検出器
12 画像表示装置
15 光ビーコン信機
17 制御回路
【特許請求の範囲】
【請求項1】
交差点(1)の手前の道路(2)上に設置され、前記道路(2)を走行する車両(4)に安全運転支援情報を送信する路側送信機(3a〜3c)と、
前記車両(4)に搭載され、前記路側送信機(3a〜3c)から送信された前記安全運転支援情報を受信する車載機(5)と、を備えた安全運転支援システムであって、
前記路側送信機(3a〜3c)は、前記車両(4)に送信する前記安全運転支援情報に、前記道路(2)上の走行車線(2a〜2c)毎の、前記交差点(1)に対する停止線(6a〜6c)の位置を示す停止線位置情報と、前記交差点(1)に設置された信号機の表示内容を示す信号機表示情報と、を含め、
前記車載機(5)は、
受信した前記安全運転支援情報に含まれる前記停止線位置情報に基づいて、前記路側送信機(3a〜3c)から最も近くに位置する最近停止線の位置と、前記路側送信機(3a〜3c)から最も遠くに位置する最遠停止線の位置を特定する最近・最遠停止線位置特定手段(145)と、
前記車両(4)の現在位置から前記最近停止線の位置までの走行所要時間が規定時間以内になったことに基づいて、前記車両(4)のドライバに、交差点進入に対する注意喚起のための報知を行う第1の報知手段(220)と、
交差点進入に対する注意喚起のための、前記第1の報知手段(220)とは異なる報知を行うための処理を行う第2の報知手段(230)と、
前記車両(4)が前記最遠停止線を越えたことに基づいて、前記第2の報知手段(230)の処理を終了するサービスアウト手段(240)と、を有することを特徴とする安全運転支援システム。
【請求項2】
交差点(1)の手前の道路(2)上に設置されて安全運転支援情報を送信する路側送信機(3a〜3c)から、前記安全運転支援情報を受信する車載機であって、
前記安全運転支援情報には、前記道路(2)上の走行車線(2a〜2c)毎の、前記交差点(1)に対する停止線(6a〜6c)の位置を示す停止線位置情報と、前記交差点(1)に設置された信号機の表示内容を示す信号機表示情報と、が含まれており、
当該車載機は、
受信した前記安全運転支援情報に含まれる前記停止線位置情報に基づいて、前記路側送信機(3a〜3c)から最も近くに位置する最近停止線の位置と、前記路側送信機(3a〜3c)から最も遠くに位置する最遠停止線の位置を特定する最近・最遠停止線位置特定手段(145)と、
前記車両(4)の現在位置から前記最近停止線の位置までの走行所要時間が規定時間以内になったことに基づいて、前記車両(4)のドライバに、交差点進入に対する注意喚起のための報知を行う第1の報知手段(220)と、
交差点進入に対する注意喚起のための、前記第1の報知手段(220)とは異なる報知を行うための処理を行う第2の報知手段(230)と、
前記車両(4)が前記最遠停止線を越えたことに基づいて、前記第2の報知手段(230)の処理を終了するサービスアウト手段(240)と、を有することを特徴とする車載機。
【請求項3】
交差点(1)の手前の道路(2)上に設置されて安全運転支援情報を送信する路側送信機(3a〜3c)から、前記安全運転支援情報を受信する車載機(5)に用いるプログラムであって、
前記安全運転支援情報には、前記道路(2)上の走行車線(2a〜2c)毎の、前記交差点(1)に対する停止線(6a〜6c)の位置を示す停止線位置情報と、前記交差点(1)に設置された信号機の表示内容を示す信号機表示情報と、が含まれており、
当該プログラムは、
受信した前記安全運転支援情報に含まれる前記停止線位置情報に基づいて、前記路側送信機(3a〜3c)から最も近くに位置する最近停止線の位置と、前記路側送信機(3a〜3c)から最も遠くに位置する最遠停止線の位置を特定する最近・最遠停止線位置特定手段(145)、
前記車両(4)の現在位置から前記最近停止線の位置までの走行所要時間が規定時間以内になったことに基づいて、前記車両(4)のドライバに、交差点進入に対する注意喚起のための報知を行う第1の報知手段(220)、
交差点進入に対する注意喚起のための、前記第1の報知手段(220)とは異なる報知を行うための処理を行う第2の報知手段(230)、および
前記車両(4)が前記最遠停止線を越えたことに基づいて、前記第2の報知手段(230)の処理を終了するサービスアウト手段(240)として、前記車載機(5)が有する制御回路(17)を、機能させることを特徴とするプログラム。
【請求項4】
交差点(1)の手前の道路(2)上に設置され、前記道路(2)を走行する車両(4)に安全運転支援情報を送信する路側送信機(3a〜3c)と、
前記車両(4)に搭載され、前記路側送信機(3a〜3c)から送信された前記安全運転支援情報を受信する車載機(5)と、を備えた安全運転支援システムであって、
前記路側送信機(3a〜3c)は、前記車両(4)に送信する前記安全運転支援情報に、前記道路(2)上の走行車線(2a〜2c)毎の、前記交差点(1)に対する停止線(6a〜6c)の位置を示す停止線位置情報と、前記交差点(1)に設置された信号機の表示内容を示す信号機表示情報と、前記車両(4)が走行している車線を示す車線通知情報と、を含め、
前記車載機(5)は、
受信した前記安全運転支援情報に含まれる前記車線通知情報に示された車線を、前記安全運転支援情報の受信時における前記車両(4)の走行車線(以下、初期走行車線という)として特定する初期走行車線特定手段(150)と、
前記初期走行車線特定手段(150)が前記初期走行車線を特定した後、前記車両(4)の前記初期走行車線からの車線変更履歴に基づいて、前記車両(4)の走行車線を逐次特定する走行車線更新手段(215)と、
前記車両(4)の現在位置から、前記走行車線更新手段(215)が特定した最新の走行車線上の停止線の位置までの走行所要時間が、規定時間以内になったことに基づいて、前記車両(4)のドライバに、交差点進入に対する注意喚起のための報知を行う第1の報知手段(220’)と、
交差点進入に対する注意喚起のための、前記第1の報知手段(220’)とは異なる報知を行うための処理を行う第2の報知手段(230)と、
前記車線更新手段(215)が特定した最新の走行車線上の停止線を前記車両(4)が越えたことに基づいて、前記第2の報知手段(230)の処理を終了するサービスアウト手段(240’)と、を有することを特徴とする安全運転支援システム。
【請求項5】
交差点(1)の手前の道路(2)上に設置されて安全運転支援情報を送信する路側送信機(3a〜3c)から、前記安全運転支援情報を受信する車載機であって、
前記安全運転支援情報には、前記道路(2)上の走行車線(2a〜2c)毎の、前記交差点(1)に対する停止線(6a〜6c)の位置を示す停止線位置情報と、前記交差点(1)に設置された信号機の表示内容を示す信号機表示情報と、前記車両(4)が走行している車線を示す車線通知情報と、が含まれており、
当該車載機は、
受信した前記安全運転支援情報に含まれる前記車線通知情報に示された車線を、前記安全運転支援情報の受信時における前記車両(4)の走行車線(以下、初期走行車線という)として特定する初期走行車線特定手段(150)と、
前記初期走行車線特定手段(150)が前記初期走行車線を特定した後、前記車両(4)の前記初期走行車線からの車線変更履歴に基づいて、前記車両(4)の走行車線を逐次特定する走行車線更新手段(215)と、
前記車両(4)の現在位置から、前記走行車線更新手段(215)が特定した最新の走行車線上の停止線の位置までの走行所要時間が、規定時間以内になったことに基づいて、前記車両(4)のドライバに、交差点進入に対する注意喚起のための報知を行う第1の報知手段(220’)と、
交差点進入に対する注意喚起のための、前記第1の報知手段(220’)とは異なる報知を行うための処理を行う第2の報知手段(230)と、
前記車線更新手段(215)が特定した最新の走行車線上の停止線を前記車両(4)が越えたことに基づいて、前記第2の報知手段(230)の処理を終了するサービスアウト手段(240’)と、を有することを特徴とする車載機。
【請求項6】
交差点(1)の手前の道路(2)上に設置されて安全運転支援情報を送信する路側送信機(3a〜3c)から、前記安全運転支援情報を受信する車載機(5)に用いるプログラムであって、
前記安全運転支援情報には、前記道路(2)上の走行車線(2a〜2c)毎の、前記交差点(1)に対する停止線(6a〜6c)の位置を示す停止線位置情報と、前記交差点(1)に設置された信号機の表示内容を示す信号機表示情報と、前記車両(4)が走行している車線を示す車線通知情報と、が含まれており、
当該プログラムは、
受信した前記安全運転支援情報に含まれる前記車線通知情報に示された車線を、前記安全運転支援情報の受信時における前記車両(4)の走行車線(以下、初期走行車線という)として特定する初期走行車線特定手段(150)、
前記初期走行車線特定手段(150)が前記初期走行車線を特定した後、前記車両(4)の前記初期走行車線からの車線変更履歴に基づいて、前記車両(4)の走行車線を逐次特定する走行車線更新手段(215)、
前記車両(4)の現在位置から、前記走行車線更新手段(215)が特定した最新の走行車線上の停止線の位置までの走行所要時間が、規定時間以内になったことに基づいて、前記車両(4)のドライバに、交差点進入に対する注意喚起のための報知を行う第1の報知手段(220’)、
交差点進入に対する注意喚起のための、前記第1の報知手段(220’)とは異なる報知を行うための処理を行う第2の報知手段(230)、および
前記車線更新手段(215)が特定した最新の走行車線上の停止線を前記車両(4)が越えたことに基づいて、前記第2の報知手段(230)の処理を終了するサービスアウト手段(240’)として、前記車載機(5)が有する制御回路(17)を機能させるプログラム。
【請求項1】
交差点(1)の手前の道路(2)上に設置され、前記道路(2)を走行する車両(4)に安全運転支援情報を送信する路側送信機(3a〜3c)と、
前記車両(4)に搭載され、前記路側送信機(3a〜3c)から送信された前記安全運転支援情報を受信する車載機(5)と、を備えた安全運転支援システムであって、
前記路側送信機(3a〜3c)は、前記車両(4)に送信する前記安全運転支援情報に、前記道路(2)上の走行車線(2a〜2c)毎の、前記交差点(1)に対する停止線(6a〜6c)の位置を示す停止線位置情報と、前記交差点(1)に設置された信号機の表示内容を示す信号機表示情報と、を含め、
前記車載機(5)は、
受信した前記安全運転支援情報に含まれる前記停止線位置情報に基づいて、前記路側送信機(3a〜3c)から最も近くに位置する最近停止線の位置と、前記路側送信機(3a〜3c)から最も遠くに位置する最遠停止線の位置を特定する最近・最遠停止線位置特定手段(145)と、
前記車両(4)の現在位置から前記最近停止線の位置までの走行所要時間が規定時間以内になったことに基づいて、前記車両(4)のドライバに、交差点進入に対する注意喚起のための報知を行う第1の報知手段(220)と、
交差点進入に対する注意喚起のための、前記第1の報知手段(220)とは異なる報知を行うための処理を行う第2の報知手段(230)と、
前記車両(4)が前記最遠停止線を越えたことに基づいて、前記第2の報知手段(230)の処理を終了するサービスアウト手段(240)と、を有することを特徴とする安全運転支援システム。
【請求項2】
交差点(1)の手前の道路(2)上に設置されて安全運転支援情報を送信する路側送信機(3a〜3c)から、前記安全運転支援情報を受信する車載機であって、
前記安全運転支援情報には、前記道路(2)上の走行車線(2a〜2c)毎の、前記交差点(1)に対する停止線(6a〜6c)の位置を示す停止線位置情報と、前記交差点(1)に設置された信号機の表示内容を示す信号機表示情報と、が含まれており、
当該車載機は、
受信した前記安全運転支援情報に含まれる前記停止線位置情報に基づいて、前記路側送信機(3a〜3c)から最も近くに位置する最近停止線の位置と、前記路側送信機(3a〜3c)から最も遠くに位置する最遠停止線の位置を特定する最近・最遠停止線位置特定手段(145)と、
前記車両(4)の現在位置から前記最近停止線の位置までの走行所要時間が規定時間以内になったことに基づいて、前記車両(4)のドライバに、交差点進入に対する注意喚起のための報知を行う第1の報知手段(220)と、
交差点進入に対する注意喚起のための、前記第1の報知手段(220)とは異なる報知を行うための処理を行う第2の報知手段(230)と、
前記車両(4)が前記最遠停止線を越えたことに基づいて、前記第2の報知手段(230)の処理を終了するサービスアウト手段(240)と、を有することを特徴とする車載機。
【請求項3】
交差点(1)の手前の道路(2)上に設置されて安全運転支援情報を送信する路側送信機(3a〜3c)から、前記安全運転支援情報を受信する車載機(5)に用いるプログラムであって、
前記安全運転支援情報には、前記道路(2)上の走行車線(2a〜2c)毎の、前記交差点(1)に対する停止線(6a〜6c)の位置を示す停止線位置情報と、前記交差点(1)に設置された信号機の表示内容を示す信号機表示情報と、が含まれており、
当該プログラムは、
受信した前記安全運転支援情報に含まれる前記停止線位置情報に基づいて、前記路側送信機(3a〜3c)から最も近くに位置する最近停止線の位置と、前記路側送信機(3a〜3c)から最も遠くに位置する最遠停止線の位置を特定する最近・最遠停止線位置特定手段(145)、
前記車両(4)の現在位置から前記最近停止線の位置までの走行所要時間が規定時間以内になったことに基づいて、前記車両(4)のドライバに、交差点進入に対する注意喚起のための報知を行う第1の報知手段(220)、
交差点進入に対する注意喚起のための、前記第1の報知手段(220)とは異なる報知を行うための処理を行う第2の報知手段(230)、および
前記車両(4)が前記最遠停止線を越えたことに基づいて、前記第2の報知手段(230)の処理を終了するサービスアウト手段(240)として、前記車載機(5)が有する制御回路(17)を、機能させることを特徴とするプログラム。
【請求項4】
交差点(1)の手前の道路(2)上に設置され、前記道路(2)を走行する車両(4)に安全運転支援情報を送信する路側送信機(3a〜3c)と、
前記車両(4)に搭載され、前記路側送信機(3a〜3c)から送信された前記安全運転支援情報を受信する車載機(5)と、を備えた安全運転支援システムであって、
前記路側送信機(3a〜3c)は、前記車両(4)に送信する前記安全運転支援情報に、前記道路(2)上の走行車線(2a〜2c)毎の、前記交差点(1)に対する停止線(6a〜6c)の位置を示す停止線位置情報と、前記交差点(1)に設置された信号機の表示内容を示す信号機表示情報と、前記車両(4)が走行している車線を示す車線通知情報と、を含め、
前記車載機(5)は、
受信した前記安全運転支援情報に含まれる前記車線通知情報に示された車線を、前記安全運転支援情報の受信時における前記車両(4)の走行車線(以下、初期走行車線という)として特定する初期走行車線特定手段(150)と、
前記初期走行車線特定手段(150)が前記初期走行車線を特定した後、前記車両(4)の前記初期走行車線からの車線変更履歴に基づいて、前記車両(4)の走行車線を逐次特定する走行車線更新手段(215)と、
前記車両(4)の現在位置から、前記走行車線更新手段(215)が特定した最新の走行車線上の停止線の位置までの走行所要時間が、規定時間以内になったことに基づいて、前記車両(4)のドライバに、交差点進入に対する注意喚起のための報知を行う第1の報知手段(220’)と、
交差点進入に対する注意喚起のための、前記第1の報知手段(220’)とは異なる報知を行うための処理を行う第2の報知手段(230)と、
前記車線更新手段(215)が特定した最新の走行車線上の停止線を前記車両(4)が越えたことに基づいて、前記第2の報知手段(230)の処理を終了するサービスアウト手段(240’)と、を有することを特徴とする安全運転支援システム。
【請求項5】
交差点(1)の手前の道路(2)上に設置されて安全運転支援情報を送信する路側送信機(3a〜3c)から、前記安全運転支援情報を受信する車載機であって、
前記安全運転支援情報には、前記道路(2)上の走行車線(2a〜2c)毎の、前記交差点(1)に対する停止線(6a〜6c)の位置を示す停止線位置情報と、前記交差点(1)に設置された信号機の表示内容を示す信号機表示情報と、前記車両(4)が走行している車線を示す車線通知情報と、が含まれており、
当該車載機は、
受信した前記安全運転支援情報に含まれる前記車線通知情報に示された車線を、前記安全運転支援情報の受信時における前記車両(4)の走行車線(以下、初期走行車線という)として特定する初期走行車線特定手段(150)と、
前記初期走行車線特定手段(150)が前記初期走行車線を特定した後、前記車両(4)の前記初期走行車線からの車線変更履歴に基づいて、前記車両(4)の走行車線を逐次特定する走行車線更新手段(215)と、
前記車両(4)の現在位置から、前記走行車線更新手段(215)が特定した最新の走行車線上の停止線の位置までの走行所要時間が、規定時間以内になったことに基づいて、前記車両(4)のドライバに、交差点進入に対する注意喚起のための報知を行う第1の報知手段(220’)と、
交差点進入に対する注意喚起のための、前記第1の報知手段(220’)とは異なる報知を行うための処理を行う第2の報知手段(230)と、
前記車線更新手段(215)が特定した最新の走行車線上の停止線を前記車両(4)が越えたことに基づいて、前記第2の報知手段(230)の処理を終了するサービスアウト手段(240’)と、を有することを特徴とする車載機。
【請求項6】
交差点(1)の手前の道路(2)上に設置されて安全運転支援情報を送信する路側送信機(3a〜3c)から、前記安全運転支援情報を受信する車載機(5)に用いるプログラムであって、
前記安全運転支援情報には、前記道路(2)上の走行車線(2a〜2c)毎の、前記交差点(1)に対する停止線(6a〜6c)の位置を示す停止線位置情報と、前記交差点(1)に設置された信号機の表示内容を示す信号機表示情報と、前記車両(4)が走行している車線を示す車線通知情報と、が含まれており、
当該プログラムは、
受信した前記安全運転支援情報に含まれる前記車線通知情報に示された車線を、前記安全運転支援情報の受信時における前記車両(4)の走行車線(以下、初期走行車線という)として特定する初期走行車線特定手段(150)、
前記初期走行車線特定手段(150)が前記初期走行車線を特定した後、前記車両(4)の前記初期走行車線からの車線変更履歴に基づいて、前記車両(4)の走行車線を逐次特定する走行車線更新手段(215)、
前記車両(4)の現在位置から、前記走行車線更新手段(215)が特定した最新の走行車線上の停止線の位置までの走行所要時間が、規定時間以内になったことに基づいて、前記車両(4)のドライバに、交差点進入に対する注意喚起のための報知を行う第1の報知手段(220’)、
交差点進入に対する注意喚起のための、前記第1の報知手段(220’)とは異なる報知を行うための処理を行う第2の報知手段(230)、および
前記車線更新手段(215)が特定した最新の走行車線上の停止線を前記車両(4)が越えたことに基づいて、前記第2の報知手段(230)の処理を終了するサービスアウト手段(240’)として、前記車載機(5)が有する制御回路(17)を機能させるプログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−180683(P2011−180683A)
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願番号】特願2010−42238(P2010−42238)
【出願日】平成22年2月26日(2010.2.26)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成23年9月15日(2011.9.15)
【国際特許分類】
【出願日】平成22年2月26日(2010.2.26)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]