
安全運転支援システムおよび車載端末
【課題】車両に搭載された車載端末により広域無線通信を用いて安全運転支援を実現する場合、通信の輻輳により、情報のリアルタイム性が失われてしまうという問題があった。
【解決手段】安全運転支援のサービス対象を交通事故発生率が高い特定エリアに限定することで広域無線通信の輻輳を回避する。特定エリアの情報は、安全運転支援のサービスを受けるべき車両に搭載された車載端末が、広域無線通信にて処理センターからダウンロードすることで得られる。車両に搭載された車載端末が基地局に対して登録処理を行う際に、広域無線通信の基地局の更新領域内で定義された特定エリアの情報をダウンロードする。
【解決手段】安全運転支援のサービス対象を交通事故発生率が高い特定エリアに限定することで広域無線通信の輻輳を回避する。特定エリアの情報は、安全運転支援のサービスを受けるべき車両に搭載された車載端末が、広域無線通信にて処理センターからダウンロードすることで得られる。車両に搭載された車載端末が基地局に対して登録処理を行う際に、広域無線通信の基地局の更新領域内で定義された特定エリアの情報をダウンロードする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、移動局と基地局で構成される広域無線通信を用いて安全運転支援方法および装置に関する。
【背景技術】
【0002】
近年、交通事故に対する総合的な対応として、無線通信を手段とした安全運転支援システムに期待が集まっている。具体的には、車両同士が自車両の位置や速度などを無線通信を用いて相互に交換することにより実現される車車間通信や、車両検知センサから得られる情報をDSRCなどの狭域通信により情報提供をする路車間通信を用い、見通しの悪い交差点における出会い頭衝突の他、正面衝突事故,追突事故,右左折事故,車線変更事故などを回避するための安全運転支援システムがある。しかしこれらのシステムは各々以下の様な問題がある。
【0003】
車両同士が無線通信を行うため車車間通信に関しては、各車両が車車間通信用の車載端末を有している必要がある。車車間通信では、車両同士が直接通信を行うために、安全運転支援を受ける自車両だけでなく他車両も車車間通信用の車載端末を有している必要がある。しかし車車間通信用の車載端末の普及が進んでいない現時点においては、事故を回避するための手段としては有力ではない。
【0004】
次に車両検知センサとDSRCを用いる安全運転支援システムに関しては、路側に設置された車両検知センサが見通し外の車両を検出し、DSRCなどの路車間通信において各車両に対して情報提供をする。このため少なくとも安全運転支援を受ける自車両がDSRC用車載端末を有していればこの安全運転支援システムが実現されるが、車両検知センサやDSRC路側機などのインフラ設備を必要とするため、インフラの整備が進まない限りは、事故を回避するための手段としては有力ではない。
【0005】
広帯域移動無線アクセスシステムや携帯電話通信網を利用した広域無線通信を用いて車両間で通信を行う技術としては、例えば特許第3454754号公報には、仲間の車両との間で位置情報を交換する技術が示されている。しかしこの技術は仲間同士の位置情報交換を目的としているため、互いに通信を可能とする範囲を広げるために、センター側の負荷を軽減するために一旦センターに蓄積された情報を一定間隔でブロードキャストするなどしているため、リアルタイムな情報交換を行うことが困難となり、事故を回避するための手段としては有効ではない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第3454754号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
移動局と基地局で構成される広域無線通信を用いて車両間で通信を行い安全運転支援を実現する場合、具体的には広域無線通信を手段として、車載端末を有する車両(移動局)同士が、互いの存在を伝えることで、見通しの悪い交差点における出会い頭衝突の他、正面衝突事故,追突事故,右左折事故,車線変更事故などを回避しようとした場合、以下の課題が発生する。
【0008】
第一の課題として通信の輻輳である。本発明で想定する広域無線通信では、セル半径はいずれも数百m〜数kmに達する。これらの広いセル内に存在する車両が一斉に1基地局を相手に通信を試みたとすると、通信の輻輳が発生し、情報のリアルタイム性は失われる。しかし事故の回避はリアルタイムな情報交換を前提に達成されるものであり、そのためには通信の輻輳は許されない。
【0009】
第二の課題として車載端末の普及率である。広域無線通信を用いる場合においても車車間通信の場合と同様に、自車両に加えて通信相手となる他車両も車載端末を有している必要がある。すなわち車載端末が普及していなければ通信の信頼性は確保されるものではない。
【課題を解決するための手段】
【0010】
本発明は上記課題を解決し、車両同士が広域無線通信を手段として互いの存在を伝えることで、安全運転支援を実現しようとするものである。
【0011】
本発明は、車載端末を有する車両(移動局)同士が、移動局と基地局で構成される広域無線通信、具体的には2.5GHz帯を用いたWiMAX(Worldwide Interoperability for Microwave Access)や次世代PHSなどの広帯域移動無線アクセスシステムの他、携帯電話通信網を利用したデータ通信などの広域無線通信を通信手段として互いの存在を伝えることで、見通しの悪い交差点における出会い頭衝突の他、正面衝突事故,追突事故,右左折事故,車線変更事故などの事故を回避させようとする安全運転支援を実現するための方法に関するものである。
【0012】
そして、通信の輻輳に対しては、安全運転支援のサービス対象を、基地局通信範囲のセル内全領域とするのではなく、交通事故発生率が高い特定エリアに限定する。ここで特定エリアとは本発明で実施する安全運転支援システムを適用する箇所として定義され、衝突を起こす可能性がある2台以上の車両が、互いの位置情報を交換することによって衝突を回避するのに十分な広さがあれば良い。例えば見通しの悪い交差点での出会い頭衝突を回避するためには、交差点の周囲数m〜数十mを網羅できる広さがあれば良い。
【0013】
特定エリアに関しては予めその位置と範囲が定義され、安全運転支援のサービスを受ける車両は、特定エリアの情報を各車両の車載端末により広域無線通信を用いて処理センターからダウンロードする。例えば車両(車載端末)が基地局に対して登録処理を行う際、例えばハンドオーバを行う際にハンドオーバ先のセル内で定義された特定エリアの情報をハンドオーバ先の基地局からダウンロードする。
【0014】
次に車載端末の普及率に関して、車載端末を普及させるためには車載端末自体のコストは低価格であることが望ましい。そこで本発明の対象とする安全運転支援システムは、汎用的に使用される広域無線通信の車載端末を用いて実現する。すなわち安全運転支援のサービスを受けるにあたり、新たに専用の機器を追加する必要は無く、例えば前述に示したWiMAX,次世代PHS,携帯電話などの様な一般的な通信手段で安全運転支援のサービスを受けることができるため、本サービスは既に普及している通信方式における車載端末にて実現できる。
【0015】
上記の通り、本発明に従えば従来問題とされていた2つの課題を解決し、汎用的な広域無線通信を用いて安全運転支援のサービスを実現できる。
【発明の効果】
【0016】
本発明は、移動局と基地局で構成される広域無線通信を用いて、安全運転支援を実現するための方法に関するもので、具体的には広域無線通信を手段として、サービス対象エリアを特定エリアに限定することにより通信の輻輳を回避して車載端末を有する車両(移動局)同士が、互いの存在を伝えることができる。
【0017】
特に本発明は前述の通り、WiMAX,次世代PHS,携帯電話などの様な一般的な通信手段で安全運転支援のサービスを受けることができるため、本発明の対象とする安全運転支援のサービスを受けるべき車両が元々これらの通信手段を有していれば、車両に新たに専用の機器を設置する必要は無い。すなわちユーザにとって追加コストは不要である。
【0018】
また本サービスは通信相手も車載端末を有していることが前提となるが、汎用的な通信プロトコルにより実現可能であるため、本サービスは元々高い普及率を有する車載端末で実現することができるため、高い信頼度の安全運転支援サービスを提供することができる。
【図面の簡単な説明】
【0019】
【図1】本発明に係る安全運転支援のサービスの構成図である。
【図2】本発明に係る特定エリアに関する定義の例である。
【図3】本発明に係る車載端末の回路ブロック図である。
【図4】本発明に係る車両および処理センターの処理の流れを示す図である。
【図5】本発明に係る車両および処理センターの処理の流れを示す図である。
【図6】本発明に係る車載端末の通信プロトコルを示す図である。
【発明を実施するための形態】
【0020】
本発明の実施例を図面を用いて説明する。
【0021】
〔実施例〕
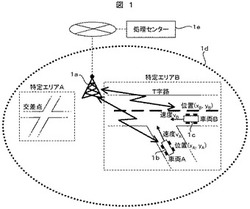
図1は本発明に係る広域無線通信の基地局(1a)とそのセル(1d)における安全運転支援のサービスの概略図を示している。また図2では、特定エリアとして定義された見通しの悪いT字路(特定エリアB)において、2台の車両(1b,1c)が接近していく場面を示している。本発明は交通事故が発生し易い箇所にて安全運転支援を行うことを目的としており、例えば見通しの悪い交差点やT字路などが安全運転支援を行う場として想定される。本発明では交通事故の発生が予想される箇所、或いは過去データより交通事故が多発していた箇所などを特定エリアとして定義する。本発明ではこれらの安全運転支援を行う箇所を特定エリアとして定義するが、その詳細は図2を用いて後述する。広域無線通信のセル半径は一般にWiMAX,次世代PHS,携帯電話などを用いた場合は数百m〜数kmとなるため、同一セル内に数箇所の特定エリアが存在することが想定される。但し、特定エリアを多く設定すればするほど、通信の輻輳の可能性も増大することを考慮に入れなくてはならない。尚、通信の輻輳に関しては後述の図2に記載の様に、特定エリアに危険度を設定することで回避することも可能である。
【0022】
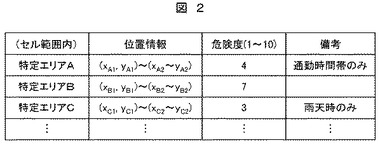
図2は、あるセル範囲内に設定された特定エリアに関する情報を示している。この特定エリアに関する情報は、例えば本発明で実施する安全運転支援のサービスを統括管理する処理センターにて、各基地局に対応するセル範囲毎に管理されたデータベースとして保存されている。図2に示す通り、1つのセル範囲における各特定エリアは、特定エリアの識別名称,その位置情報,危険度と、備考としてそれ以外の適用条件を表す情報にて定義されている。まず位置情報は特定エリアの範囲を指定するもので、例えば交差点の周囲50mの範囲を網羅する様に定義されている。位置情報の指定方法に関して、図2に示す例では緯度,経度による矩形範囲を表す座標表示を用いたが、必ずしもこの方法に限定されるものではない。次に、危険度とはその危険の度合いを示したもので、例えば同じセル範囲内で複数の特定エリアに関する通信が混雑する様な場合において、その通信の優先度を決定する際などに用いることができる。図2の例では、危険度を1から10の値で表している。また、適用条件を表す情報として、例えば時間帯や天候により危険度の条件が変わる場合にその旨を定義情報に反映させるために、特定エリアとして扱う時間帯や天候を備考に設定しておくことも可能である。
【0023】
本発明では、状況に応じて特定エリアの情報をリアルタイムに再定義することが可能である。これらの特定エリアに関する情報は、例えば基地局1aのセル範囲毎に定義し、処理センター1eで管理する。これにより車両が車載端末により広域無線通信を通じて処理センター1eからダウンロードすることで、同一セル内に存在する全ての車両が同じ情報を共有することが可能となる。車両がダウンロードするタイミングは車載端末が通信時の登録処理を行うタイミング、すなわち該当するセルにて通信を開始するタイミングが望ましく、例えばエンジンを始動する際やハンドオーバをする際に該当セルの特定エリアの情報をダウンロードする。
【0024】
図4は本発明による安全運転支援の実施の流れを示したものである。具体的には車両A(1b)および車両B(1c)が同一の特定エリアに存在する場面となったときに、各車両および処理センター(1e)が行う処理の流れを示したものである。尚、図4においては、厳密には各車両は基地局1aを通じて無線通信を行うことになるが、基地局1aでの動作に関する記載は省略している。まず車両Aが基地局1aに登録処理をして通信を開始する際、具体的にはエンジン始動するか、或いはハンドオーバする際に、車両Aは自車両が居るセル内の特定エリア情報を処理センター1eに要求する(4a)。処理センター1eでは、特定エリア情報を要求してきた車両が存在するセル内の特定エリア情報を配信し(4m)、要求元の車両Aでは処理センター1eから特定エリア情報をダウンロードする(4c)。同様にして車両B(1c)でも、基地局1aに登録処理をして通信を開始する際、具体的にはエンジン始動するか、或いはハンドオーバする際に、自車両が居るセル内の特定エリア情報を処理センター1eに要求する(4g)。処理センター1eでは、特定エリア情報を要求してきた車両が存在するセル内の特定エリア情報を配信し(4m)、要求元の車両Bでは処理センター1eから特定エリア情報をダウンロードする(4i)。
【0025】
車両Aは走行中、例えばGPS情報により自車両の位置情報を定期的に把握することができるため、上記特定エリアへの進入を検出することが可能である(4d)。車両Aではいずれかの特定エリアへ侵入したと判断した際(4dの処理でYes)には、処理センター1eに少なくとも車両Aの位置,速度,方向に関する情報をアップリンクする(4e)。一方、車両Bにおいても同様の処理の流れで、特定エリアへの進入を検出した際(4jの処理でYes)には、処理センター1eに車両Bの位置,速度,方向に関する情報がアップリンクされる(4k)。ここで処理センター1eには車両Aおよび車両Bに関する情報が集まり、両車両の衝突の可能性を演算することが可能となる。処理センター1eでは、アップリンクされてきた車両の位置,速度,方向に関する情報を受信すると、同一の特定エリア内に存在する車両を特定し、特定された同一の特定エリア内に存在する車両同士の間で衝突が起こる可能性を演算する(4n)。衝突可能性の演算方法に特に限定は無いが、例えば、互いの車両の位置と速度と方向が分かれば、各々の車両の速度が一定であることを前提とすると、何秒後に衝突するかを演算することが可能である。或いは逆にx秒後の両車両の車間距離を演算することも可能である。処理センター1eはこうして得られた演算結果と、予め定義された判定値を比較することで、同一の特定エリア内に存在する車両同士の衝突の可能性を検証することができる。次に上記演算の結果、両車両が衝突を起こす可能性があると判断される場合(4oでYes)、その旨を該当する車両、図4に示す例の場合車両Aおよび車両Bに通知する。
【0026】
通知方法としてはドライバーが瞬間的にその旨を理解できる様に簡易図形を用いる方法がある。処理センターにて両車両の衝突の可能性が高いと判断できる場合は、処理センターにて衝突の可能性がある旨を示した簡易図形を作成して、それを両車両に配信することも効果的である。図4に示す例では、処理センター1eにて作成した簡易図形を広域無線通信で車両Aおよび車両Bに配信する(4p)。また逆に、車両にて予め簡易図形をデータとして持っていて、衝突可能性を警告する際に使用する簡易図形データを指定する情報を送るようにしても良い。
【0027】
処理センター1eから基地局1aを通じて各車両に情報を配信するための方法は、特定エリアに存在する対象車両のみに他車両の接近情報を伝えれば良いが、このような該当車両に限定して配信する方法の他、セル内に属する全ての車両にブロードキャストして情報配信を行っても良い。但しセル内に属する全ての車両にブロードキャストする場合は各車両側にて、各車両にて自車両に関する情報のみをフィルタリングして表示する機能を有していることが望ましい。また処理センター1eでは、複数の特定エリアにおける処理を同時に実行する必要があるが、それらの処理の優先順位として衝突可能性が高い車両に対して優先して情報を配信できることが望ましい。処理センター1eから受信した情報に基づき各車両では警告情報をドライバーに通知する(4f,4l)。ドライバーへの警告処理に関しては、図3の説明にて後述する。
【0028】
以上のように本実施例に従えば、特定エリアは時刻や周囲状況に応じて特定エリアの定義方法をカスタマイズすることも可能で、例えば通勤時間帯のみ危険となる区域や、夕日により前方が見え難くなる様な区域においてはそれに応じて特定エリアを定義することが可能である。更に通信の信頼度を高めるためには、特定エリアの交通事故発生率に応じて危険度を設定したり、処理センターで車両同士が衝突を起こす可能性を演算した結果に基づいて通信の優先順位を決定することも有効である。
【0029】
図3は、車両に搭載する車載端末の回路ブロック図を示している。車載端末は主に広域無線通信アンテナ(3a)と車載端末本体(3b)にて構成され、車載端末本体(3b)はカーナビゲーションシステム装置(3c)に接続するためのインタフェースを有している。また自車の位置情報を取得するための手段としてGPSアンテナ(3g)とGPS受信回路(3h)は、本例では車載端末本体(3b)およびカーナビゲーションシステム装置(3c)から分離された構成としてあるが、上記のどちらかにそれに相当する機能が内蔵されていればそれを利用しても良い。まず広域無線通信アンテナ(3a)は基地局との間で広域無線通信を行う手段であり、例えばルーフトップやダッシュボード上などに設置される。広域無線通信アンテナ(3a)からは高周波信号を伝送可能な同軸ケーブルを介して車載端末本体(3b)に接続される。本体は主に高周波信号とベースバンド信号を互いに変換するための高周波回路部(3d)と、ベースバンド信号の変調および復調を行うベースバンド信号処理部(3e)と、車載端末全体を統括制御する制御処理部(3f)にて構成される。
【0030】
前述の通り、車載端末本体(3b)はカーナビゲーションシステム装置(3c)と接続可能なインタフェースを有しており、例えばUSBなどの汎用的なインタフェースにより実現可能である。車載端末本体(3b)に接続されているカーナビゲーションシステム装置(3c)は、ドライバーに対するヒューマンマシンインタフェースとして、例えば他車両が接近している旨をドライバーに通知する手段としても用いる。具体的には、処理センター1eが処理4pでダウンリンクした簡易図形を表示したり、他車両の位置情報を表示したり、あるいは音声出力を用いるなどしてドライバーに警告したりする用途として用いることができる。逆に車載端末本体(3b)にてそれに相当する機能が設けられていれば、必ずしもカーナビゲーションシステム装置(3c)を接続する必要は無い。尚、車載端末本体(3b),GPS受信回路(3h)などは必ずしもドライバーから見える位置にある必要は無く、例えばダッシュボード内に収めて設置しても良い。
【0031】
本発明の実施においては通信のプロトコルに関しては特に限定は無いが、例えばTCP/IPなどの汎用的なプロトコルにて実現できる。図6は車載端末が有するべき通信プロトコルをOSI参照モデルに習って記載したものである。本図に示す通り本発明は一般的な通信プロトコルにて実現することを想定しており、新たに専用の機器を追加でセットアップする必要は無い。すなわち本発明で示す安全運転支援のサービスは、例えばTCP/IPのプロトコルで通信が可能な広域無線通信端末があれば利用することができる。また更にはリアルタイム性を追及して、高速リアルタイム性を有するプロトコルを採用するのも効果的で、例えばオンライン会議システムなどで採用されているRTP/UDP/IPなどテレビ会議などで実績のあるリアルタイム通信に適したプロトコルを適用することで、他車両の接近情報をよりリアルタイムに確実に得ることができ、安全運転支援で特に必要とされるリアルタイム性を更に向上させることも可能である。すなわち2台の車両間でセッションを確立しリアルタイムに位置情報を交換することも可能である。
【0032】
図5は本発明の実施の流れのもう一つの例を示したもので、車両Aと車両Bがセッションを確立し、互いの車両が自立的に自車両の情報(位置,速度,方向)を交換するという点で図4とは異なる。図5に示す例においても、特定エリア情報のダウンロードに関しては、図4において説明した処理と同様である。車両A(1b)と車両B(1c)の各車両では、やはり図4に示した例と同様にして自車両が特定エリアに進入したか否かを判定する(5d,5m)。そして、自車両が特定エリアに進入したと判断した際には、処理センター1eに対して侵入したと判断した特定エリアの情報をアップリンクして、特定エリアへの侵入を通知する。処理センター1eでは、各車両からアップリンクされてくる特定エリアの情報を受信して、同一の特定エリアに存在する車両を確認する(5r)。一方、特定エリアに進入したと判断した車両では、同じ特定エリア内の車両との通信セッションの確立を試みる。尚、互いの車両間で通信セッションを確立する際は、必要に応じて、両車両が同一特定エリアに存在することを知る処理センターがその仲介をする(5s)必要がある。セッションが確立されると(5f)、両車両は互いに車両の位置,速度,方向に関する情報を交換する(5g)。互いの車両情報(位置,速度,方向)を交換した結果、両車両ではそれぞれ自車と他車の位置,速度,方向の情報より、互いの衝突の可能性を計算する。そして衝突の可能性があるか判断して(5h,5o)、衝突の可能性があると判断した場合は、その旨をドライバーに警告をする(5i,5p)。衝突可能性の判断方法は、図4における説明で前述した方法を適用することができる。尚、本例においては、前述のリアルタイム通信に適したプロトコルRTP/UDP/IPを用いることで、用途の幅を更に広げることも可能である。例えば、他車両が移動する様子をリアルタイムに自車のカーナビゲーションシステム装置上に表示することも可能となる。
【0033】
以上に示す様に、本発明で示した安全運転支援システムは、従来の課題を解決し、汎用的な広域無線通信を用いて安全運転支援のサービスを実現できることが示された。
【産業上の利用可能性】
【0034】
本発明は、汎用的な広域無線通信の通信機を車両に搭載した移動局と基地局で構成される広域無線通信を用いて、安全運転支援のサービスを実現する際に適用することができる。
【符号の説明】
【0035】
1a 基地局
1b 車両A
1c 車両B
1d セル
1e 処理センター
3a 広域無線通信アンテナ
3b 車載端末本体
3c カーナビゲーションシステム装置
3d 高周波回路部
3e ベースバンド信号処理部
3f 制御処理部
3g GPSアンテナ
3h GPS受信回路
【技術分野】
【0001】
本発明は、移動局と基地局で構成される広域無線通信を用いて安全運転支援方法および装置に関する。
【背景技術】
【0002】
近年、交通事故に対する総合的な対応として、無線通信を手段とした安全運転支援システムに期待が集まっている。具体的には、車両同士が自車両の位置や速度などを無線通信を用いて相互に交換することにより実現される車車間通信や、車両検知センサから得られる情報をDSRCなどの狭域通信により情報提供をする路車間通信を用い、見通しの悪い交差点における出会い頭衝突の他、正面衝突事故,追突事故,右左折事故,車線変更事故などを回避するための安全運転支援システムがある。しかしこれらのシステムは各々以下の様な問題がある。
【0003】
車両同士が無線通信を行うため車車間通信に関しては、各車両が車車間通信用の車載端末を有している必要がある。車車間通信では、車両同士が直接通信を行うために、安全運転支援を受ける自車両だけでなく他車両も車車間通信用の車載端末を有している必要がある。しかし車車間通信用の車載端末の普及が進んでいない現時点においては、事故を回避するための手段としては有力ではない。
【0004】
次に車両検知センサとDSRCを用いる安全運転支援システムに関しては、路側に設置された車両検知センサが見通し外の車両を検出し、DSRCなどの路車間通信において各車両に対して情報提供をする。このため少なくとも安全運転支援を受ける自車両がDSRC用車載端末を有していればこの安全運転支援システムが実現されるが、車両検知センサやDSRC路側機などのインフラ設備を必要とするため、インフラの整備が進まない限りは、事故を回避するための手段としては有力ではない。
【0005】
広帯域移動無線アクセスシステムや携帯電話通信網を利用した広域無線通信を用いて車両間で通信を行う技術としては、例えば特許第3454754号公報には、仲間の車両との間で位置情報を交換する技術が示されている。しかしこの技術は仲間同士の位置情報交換を目的としているため、互いに通信を可能とする範囲を広げるために、センター側の負荷を軽減するために一旦センターに蓄積された情報を一定間隔でブロードキャストするなどしているため、リアルタイムな情報交換を行うことが困難となり、事故を回避するための手段としては有効ではない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第3454754号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
移動局と基地局で構成される広域無線通信を用いて車両間で通信を行い安全運転支援を実現する場合、具体的には広域無線通信を手段として、車載端末を有する車両(移動局)同士が、互いの存在を伝えることで、見通しの悪い交差点における出会い頭衝突の他、正面衝突事故,追突事故,右左折事故,車線変更事故などを回避しようとした場合、以下の課題が発生する。
【0008】
第一の課題として通信の輻輳である。本発明で想定する広域無線通信では、セル半径はいずれも数百m〜数kmに達する。これらの広いセル内に存在する車両が一斉に1基地局を相手に通信を試みたとすると、通信の輻輳が発生し、情報のリアルタイム性は失われる。しかし事故の回避はリアルタイムな情報交換を前提に達成されるものであり、そのためには通信の輻輳は許されない。
【0009】
第二の課題として車載端末の普及率である。広域無線通信を用いる場合においても車車間通信の場合と同様に、自車両に加えて通信相手となる他車両も車載端末を有している必要がある。すなわち車載端末が普及していなければ通信の信頼性は確保されるものではない。
【課題を解決するための手段】
【0010】
本発明は上記課題を解決し、車両同士が広域無線通信を手段として互いの存在を伝えることで、安全運転支援を実現しようとするものである。
【0011】
本発明は、車載端末を有する車両(移動局)同士が、移動局と基地局で構成される広域無線通信、具体的には2.5GHz帯を用いたWiMAX(Worldwide Interoperability for Microwave Access)や次世代PHSなどの広帯域移動無線アクセスシステムの他、携帯電話通信網を利用したデータ通信などの広域無線通信を通信手段として互いの存在を伝えることで、見通しの悪い交差点における出会い頭衝突の他、正面衝突事故,追突事故,右左折事故,車線変更事故などの事故を回避させようとする安全運転支援を実現するための方法に関するものである。
【0012】
そして、通信の輻輳に対しては、安全運転支援のサービス対象を、基地局通信範囲のセル内全領域とするのではなく、交通事故発生率が高い特定エリアに限定する。ここで特定エリアとは本発明で実施する安全運転支援システムを適用する箇所として定義され、衝突を起こす可能性がある2台以上の車両が、互いの位置情報を交換することによって衝突を回避するのに十分な広さがあれば良い。例えば見通しの悪い交差点での出会い頭衝突を回避するためには、交差点の周囲数m〜数十mを網羅できる広さがあれば良い。
【0013】
特定エリアに関しては予めその位置と範囲が定義され、安全運転支援のサービスを受ける車両は、特定エリアの情報を各車両の車載端末により広域無線通信を用いて処理センターからダウンロードする。例えば車両(車載端末)が基地局に対して登録処理を行う際、例えばハンドオーバを行う際にハンドオーバ先のセル内で定義された特定エリアの情報をハンドオーバ先の基地局からダウンロードする。
【0014】
次に車載端末の普及率に関して、車載端末を普及させるためには車載端末自体のコストは低価格であることが望ましい。そこで本発明の対象とする安全運転支援システムは、汎用的に使用される広域無線通信の車載端末を用いて実現する。すなわち安全運転支援のサービスを受けるにあたり、新たに専用の機器を追加する必要は無く、例えば前述に示したWiMAX,次世代PHS,携帯電話などの様な一般的な通信手段で安全運転支援のサービスを受けることができるため、本サービスは既に普及している通信方式における車載端末にて実現できる。
【0015】
上記の通り、本発明に従えば従来問題とされていた2つの課題を解決し、汎用的な広域無線通信を用いて安全運転支援のサービスを実現できる。
【発明の効果】
【0016】
本発明は、移動局と基地局で構成される広域無線通信を用いて、安全運転支援を実現するための方法に関するもので、具体的には広域無線通信を手段として、サービス対象エリアを特定エリアに限定することにより通信の輻輳を回避して車載端末を有する車両(移動局)同士が、互いの存在を伝えることができる。
【0017】
特に本発明は前述の通り、WiMAX,次世代PHS,携帯電話などの様な一般的な通信手段で安全運転支援のサービスを受けることができるため、本発明の対象とする安全運転支援のサービスを受けるべき車両が元々これらの通信手段を有していれば、車両に新たに専用の機器を設置する必要は無い。すなわちユーザにとって追加コストは不要である。
【0018】
また本サービスは通信相手も車載端末を有していることが前提となるが、汎用的な通信プロトコルにより実現可能であるため、本サービスは元々高い普及率を有する車載端末で実現することができるため、高い信頼度の安全運転支援サービスを提供することができる。
【図面の簡単な説明】
【0019】
【図1】本発明に係る安全運転支援のサービスの構成図である。
【図2】本発明に係る特定エリアに関する定義の例である。
【図3】本発明に係る車載端末の回路ブロック図である。
【図4】本発明に係る車両および処理センターの処理の流れを示す図である。
【図5】本発明に係る車両および処理センターの処理の流れを示す図である。
【図6】本発明に係る車載端末の通信プロトコルを示す図である。
【発明を実施するための形態】
【0020】
本発明の実施例を図面を用いて説明する。
【0021】
〔実施例〕
図1は本発明に係る広域無線通信の基地局(1a)とそのセル(1d)における安全運転支援のサービスの概略図を示している。また図2では、特定エリアとして定義された見通しの悪いT字路(特定エリアB)において、2台の車両(1b,1c)が接近していく場面を示している。本発明は交通事故が発生し易い箇所にて安全運転支援を行うことを目的としており、例えば見通しの悪い交差点やT字路などが安全運転支援を行う場として想定される。本発明では交通事故の発生が予想される箇所、或いは過去データより交通事故が多発していた箇所などを特定エリアとして定義する。本発明ではこれらの安全運転支援を行う箇所を特定エリアとして定義するが、その詳細は図2を用いて後述する。広域無線通信のセル半径は一般にWiMAX,次世代PHS,携帯電話などを用いた場合は数百m〜数kmとなるため、同一セル内に数箇所の特定エリアが存在することが想定される。但し、特定エリアを多く設定すればするほど、通信の輻輳の可能性も増大することを考慮に入れなくてはならない。尚、通信の輻輳に関しては後述の図2に記載の様に、特定エリアに危険度を設定することで回避することも可能である。
【0022】
図2は、あるセル範囲内に設定された特定エリアに関する情報を示している。この特定エリアに関する情報は、例えば本発明で実施する安全運転支援のサービスを統括管理する処理センターにて、各基地局に対応するセル範囲毎に管理されたデータベースとして保存されている。図2に示す通り、1つのセル範囲における各特定エリアは、特定エリアの識別名称,その位置情報,危険度と、備考としてそれ以外の適用条件を表す情報にて定義されている。まず位置情報は特定エリアの範囲を指定するもので、例えば交差点の周囲50mの範囲を網羅する様に定義されている。位置情報の指定方法に関して、図2に示す例では緯度,経度による矩形範囲を表す座標表示を用いたが、必ずしもこの方法に限定されるものではない。次に、危険度とはその危険の度合いを示したもので、例えば同じセル範囲内で複数の特定エリアに関する通信が混雑する様な場合において、その通信の優先度を決定する際などに用いることができる。図2の例では、危険度を1から10の値で表している。また、適用条件を表す情報として、例えば時間帯や天候により危険度の条件が変わる場合にその旨を定義情報に反映させるために、特定エリアとして扱う時間帯や天候を備考に設定しておくことも可能である。
【0023】
本発明では、状況に応じて特定エリアの情報をリアルタイムに再定義することが可能である。これらの特定エリアに関する情報は、例えば基地局1aのセル範囲毎に定義し、処理センター1eで管理する。これにより車両が車載端末により広域無線通信を通じて処理センター1eからダウンロードすることで、同一セル内に存在する全ての車両が同じ情報を共有することが可能となる。車両がダウンロードするタイミングは車載端末が通信時の登録処理を行うタイミング、すなわち該当するセルにて通信を開始するタイミングが望ましく、例えばエンジンを始動する際やハンドオーバをする際に該当セルの特定エリアの情報をダウンロードする。
【0024】
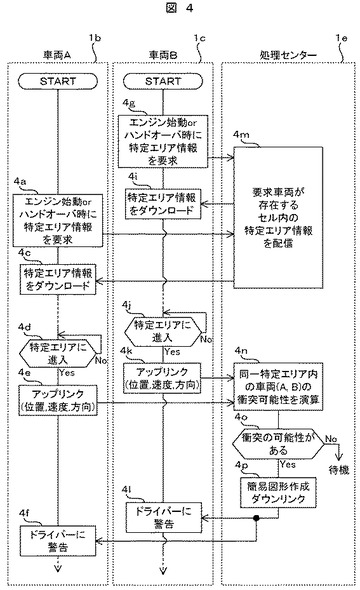
図4は本発明による安全運転支援の実施の流れを示したものである。具体的には車両A(1b)および車両B(1c)が同一の特定エリアに存在する場面となったときに、各車両および処理センター(1e)が行う処理の流れを示したものである。尚、図4においては、厳密には各車両は基地局1aを通じて無線通信を行うことになるが、基地局1aでの動作に関する記載は省略している。まず車両Aが基地局1aに登録処理をして通信を開始する際、具体的にはエンジン始動するか、或いはハンドオーバする際に、車両Aは自車両が居るセル内の特定エリア情報を処理センター1eに要求する(4a)。処理センター1eでは、特定エリア情報を要求してきた車両が存在するセル内の特定エリア情報を配信し(4m)、要求元の車両Aでは処理センター1eから特定エリア情報をダウンロードする(4c)。同様にして車両B(1c)でも、基地局1aに登録処理をして通信を開始する際、具体的にはエンジン始動するか、或いはハンドオーバする際に、自車両が居るセル内の特定エリア情報を処理センター1eに要求する(4g)。処理センター1eでは、特定エリア情報を要求してきた車両が存在するセル内の特定エリア情報を配信し(4m)、要求元の車両Bでは処理センター1eから特定エリア情報をダウンロードする(4i)。
【0025】
車両Aは走行中、例えばGPS情報により自車両の位置情報を定期的に把握することができるため、上記特定エリアへの進入を検出することが可能である(4d)。車両Aではいずれかの特定エリアへ侵入したと判断した際(4dの処理でYes)には、処理センター1eに少なくとも車両Aの位置,速度,方向に関する情報をアップリンクする(4e)。一方、車両Bにおいても同様の処理の流れで、特定エリアへの進入を検出した際(4jの処理でYes)には、処理センター1eに車両Bの位置,速度,方向に関する情報がアップリンクされる(4k)。ここで処理センター1eには車両Aおよび車両Bに関する情報が集まり、両車両の衝突の可能性を演算することが可能となる。処理センター1eでは、アップリンクされてきた車両の位置,速度,方向に関する情報を受信すると、同一の特定エリア内に存在する車両を特定し、特定された同一の特定エリア内に存在する車両同士の間で衝突が起こる可能性を演算する(4n)。衝突可能性の演算方法に特に限定は無いが、例えば、互いの車両の位置と速度と方向が分かれば、各々の車両の速度が一定であることを前提とすると、何秒後に衝突するかを演算することが可能である。或いは逆にx秒後の両車両の車間距離を演算することも可能である。処理センター1eはこうして得られた演算結果と、予め定義された判定値を比較することで、同一の特定エリア内に存在する車両同士の衝突の可能性を検証することができる。次に上記演算の結果、両車両が衝突を起こす可能性があると判断される場合(4oでYes)、その旨を該当する車両、図4に示す例の場合車両Aおよび車両Bに通知する。
【0026】
通知方法としてはドライバーが瞬間的にその旨を理解できる様に簡易図形を用いる方法がある。処理センターにて両車両の衝突の可能性が高いと判断できる場合は、処理センターにて衝突の可能性がある旨を示した簡易図形を作成して、それを両車両に配信することも効果的である。図4に示す例では、処理センター1eにて作成した簡易図形を広域無線通信で車両Aおよび車両Bに配信する(4p)。また逆に、車両にて予め簡易図形をデータとして持っていて、衝突可能性を警告する際に使用する簡易図形データを指定する情報を送るようにしても良い。
【0027】
処理センター1eから基地局1aを通じて各車両に情報を配信するための方法は、特定エリアに存在する対象車両のみに他車両の接近情報を伝えれば良いが、このような該当車両に限定して配信する方法の他、セル内に属する全ての車両にブロードキャストして情報配信を行っても良い。但しセル内に属する全ての車両にブロードキャストする場合は各車両側にて、各車両にて自車両に関する情報のみをフィルタリングして表示する機能を有していることが望ましい。また処理センター1eでは、複数の特定エリアにおける処理を同時に実行する必要があるが、それらの処理の優先順位として衝突可能性が高い車両に対して優先して情報を配信できることが望ましい。処理センター1eから受信した情報に基づき各車両では警告情報をドライバーに通知する(4f,4l)。ドライバーへの警告処理に関しては、図3の説明にて後述する。
【0028】
以上のように本実施例に従えば、特定エリアは時刻や周囲状況に応じて特定エリアの定義方法をカスタマイズすることも可能で、例えば通勤時間帯のみ危険となる区域や、夕日により前方が見え難くなる様な区域においてはそれに応じて特定エリアを定義することが可能である。更に通信の信頼度を高めるためには、特定エリアの交通事故発生率に応じて危険度を設定したり、処理センターで車両同士が衝突を起こす可能性を演算した結果に基づいて通信の優先順位を決定することも有効である。
【0029】
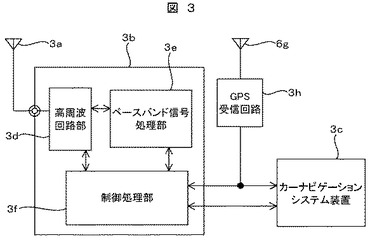
図3は、車両に搭載する車載端末の回路ブロック図を示している。車載端末は主に広域無線通信アンテナ(3a)と車載端末本体(3b)にて構成され、車載端末本体(3b)はカーナビゲーションシステム装置(3c)に接続するためのインタフェースを有している。また自車の位置情報を取得するための手段としてGPSアンテナ(3g)とGPS受信回路(3h)は、本例では車載端末本体(3b)およびカーナビゲーションシステム装置(3c)から分離された構成としてあるが、上記のどちらかにそれに相当する機能が内蔵されていればそれを利用しても良い。まず広域無線通信アンテナ(3a)は基地局との間で広域無線通信を行う手段であり、例えばルーフトップやダッシュボード上などに設置される。広域無線通信アンテナ(3a)からは高周波信号を伝送可能な同軸ケーブルを介して車載端末本体(3b)に接続される。本体は主に高周波信号とベースバンド信号を互いに変換するための高周波回路部(3d)と、ベースバンド信号の変調および復調を行うベースバンド信号処理部(3e)と、車載端末全体を統括制御する制御処理部(3f)にて構成される。
【0030】
前述の通り、車載端末本体(3b)はカーナビゲーションシステム装置(3c)と接続可能なインタフェースを有しており、例えばUSBなどの汎用的なインタフェースにより実現可能である。車載端末本体(3b)に接続されているカーナビゲーションシステム装置(3c)は、ドライバーに対するヒューマンマシンインタフェースとして、例えば他車両が接近している旨をドライバーに通知する手段としても用いる。具体的には、処理センター1eが処理4pでダウンリンクした簡易図形を表示したり、他車両の位置情報を表示したり、あるいは音声出力を用いるなどしてドライバーに警告したりする用途として用いることができる。逆に車載端末本体(3b)にてそれに相当する機能が設けられていれば、必ずしもカーナビゲーションシステム装置(3c)を接続する必要は無い。尚、車載端末本体(3b),GPS受信回路(3h)などは必ずしもドライバーから見える位置にある必要は無く、例えばダッシュボード内に収めて設置しても良い。
【0031】
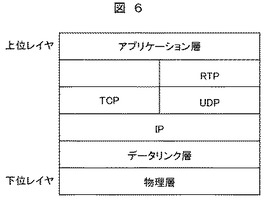
本発明の実施においては通信のプロトコルに関しては特に限定は無いが、例えばTCP/IPなどの汎用的なプロトコルにて実現できる。図6は車載端末が有するべき通信プロトコルをOSI参照モデルに習って記載したものである。本図に示す通り本発明は一般的な通信プロトコルにて実現することを想定しており、新たに専用の機器を追加でセットアップする必要は無い。すなわち本発明で示す安全運転支援のサービスは、例えばTCP/IPのプロトコルで通信が可能な広域無線通信端末があれば利用することができる。また更にはリアルタイム性を追及して、高速リアルタイム性を有するプロトコルを採用するのも効果的で、例えばオンライン会議システムなどで採用されているRTP/UDP/IPなどテレビ会議などで実績のあるリアルタイム通信に適したプロトコルを適用することで、他車両の接近情報をよりリアルタイムに確実に得ることができ、安全運転支援で特に必要とされるリアルタイム性を更に向上させることも可能である。すなわち2台の車両間でセッションを確立しリアルタイムに位置情報を交換することも可能である。
【0032】
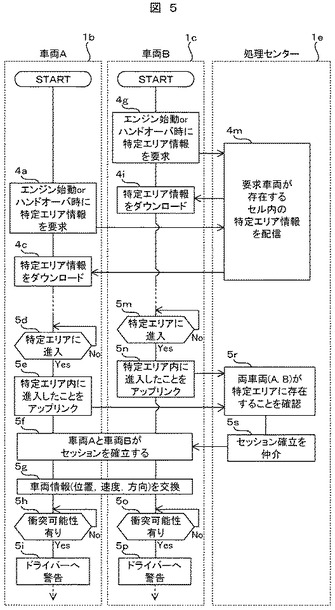
図5は本発明の実施の流れのもう一つの例を示したもので、車両Aと車両Bがセッションを確立し、互いの車両が自立的に自車両の情報(位置,速度,方向)を交換するという点で図4とは異なる。図5に示す例においても、特定エリア情報のダウンロードに関しては、図4において説明した処理と同様である。車両A(1b)と車両B(1c)の各車両では、やはり図4に示した例と同様にして自車両が特定エリアに進入したか否かを判定する(5d,5m)。そして、自車両が特定エリアに進入したと判断した際には、処理センター1eに対して侵入したと判断した特定エリアの情報をアップリンクして、特定エリアへの侵入を通知する。処理センター1eでは、各車両からアップリンクされてくる特定エリアの情報を受信して、同一の特定エリアに存在する車両を確認する(5r)。一方、特定エリアに進入したと判断した車両では、同じ特定エリア内の車両との通信セッションの確立を試みる。尚、互いの車両間で通信セッションを確立する際は、必要に応じて、両車両が同一特定エリアに存在することを知る処理センターがその仲介をする(5s)必要がある。セッションが確立されると(5f)、両車両は互いに車両の位置,速度,方向に関する情報を交換する(5g)。互いの車両情報(位置,速度,方向)を交換した結果、両車両ではそれぞれ自車と他車の位置,速度,方向の情報より、互いの衝突の可能性を計算する。そして衝突の可能性があるか判断して(5h,5o)、衝突の可能性があると判断した場合は、その旨をドライバーに警告をする(5i,5p)。衝突可能性の判断方法は、図4における説明で前述した方法を適用することができる。尚、本例においては、前述のリアルタイム通信に適したプロトコルRTP/UDP/IPを用いることで、用途の幅を更に広げることも可能である。例えば、他車両が移動する様子をリアルタイムに自車のカーナビゲーションシステム装置上に表示することも可能となる。
【0033】
以上に示す様に、本発明で示した安全運転支援システムは、従来の課題を解決し、汎用的な広域無線通信を用いて安全運転支援のサービスを実現できることが示された。
【産業上の利用可能性】
【0034】
本発明は、汎用的な広域無線通信の通信機を車両に搭載した移動局と基地局で構成される広域無線通信を用いて、安全運転支援のサービスを実現する際に適用することができる。
【符号の説明】
【0035】
1a 基地局
1b 車両A
1c 車両B
1d セル
1e 処理センター
3a 広域無線通信アンテナ
3b 車載端末本体
3c カーナビゲーションシステム装置
3d 高周波回路部
3e ベースバンド信号処理部
3f 制御処理部
3g GPSアンテナ
3h GPS受信回路
【特許請求の範囲】
【請求項1】
複数の車両が処理センターと基地局を介して広域無線通信を行う安全運転支援システムにおいて、
前記車両はそれぞれ、少なくとも前記基地局と前記広域無線通信を行うことができる車載端末と、自車両の位置情報を測位するための位置情報測位手段を備え、
前記基地局のセル範囲内に定義された安全運転支援サービスを適用する箇所として定義された特定エリアの情報を前記処理センターから前記広域無線通信によりダウンロードし、
前記自車両の位置情報により自車両が前記特定エリアに進入したことを判断し、前記特定エリアに進入した際には、前記処理センターへ自車両の位置,速度,方向の情報を含む車両情報を送信し、
前記処理センターは、
前記基地局のセル範囲内における前記特定エリアを記憶する手段と、
前記車両からの要求に応じて前記特定エリアに関する情報を前記広域無線通信により、前記基地局のセル範囲内に存在する車両に配信し、
前記車両から送信されてくる前記車両情報を用いて、同一の特定エリア内に存在する複数の車両を判別し、当該判別された複数の車両について前記車両情報を用いて互いの衝突の可能性を計算し、衝突の可能性が有ると判断された場合には、前記判別された車両に対して警告情報を配信する
ことを特徴とする安全運転支援システム。
【請求項2】
請求項1に記載の安全運転支援システムにおいて、
前記特定エリアに関する情報は、前記基地局のセルに存在する車両が有する車載端末が該基地局に登録処理を行う際に、前記広域無線通信を手段として該基地局から配信されることを特徴とする安全運転支援システム。
【請求項3】
請求項1に記載の安全運転支援システムにおいて、
前記特定エリアは前記処理センターにて、時刻や周囲状況に応じてリアルタイムに再定義できることを特徴とする安全運転支援システム。
【請求項4】
請求項1に記載の安全運転支援システムにおいて、
前記特定エリアにはその危険度に応じた優先順位が定義され、前記処理センターは該優先順位に応じて前記基地局のセルに存在する前記車両との通信の優先順位を決定することを特徴とする安全運転支援システム。
【請求項5】
請求項1に記載の安全運転支援システムにおいて、
前記処理センターは、前記車両から得られる情報を用いて、同一の特定エリア内に存在する複数の車両が衝突する可能性を演算し、複数の車両が衝突する可能性が予め定義された判定値を超えている場合には、当該複数の車両の運転者への前記警告情報として簡易図形を該当車両に配信することを特徴とする安全運転支援システム。
【請求項1】
複数の車両が処理センターと基地局を介して広域無線通信を行う安全運転支援システムにおいて、
前記車両はそれぞれ、少なくとも前記基地局と前記広域無線通信を行うことができる車載端末と、自車両の位置情報を測位するための位置情報測位手段を備え、
前記基地局のセル範囲内に定義された安全運転支援サービスを適用する箇所として定義された特定エリアの情報を前記処理センターから前記広域無線通信によりダウンロードし、
前記自車両の位置情報により自車両が前記特定エリアに進入したことを判断し、前記特定エリアに進入した際には、前記処理センターへ自車両の位置,速度,方向の情報を含む車両情報を送信し、
前記処理センターは、
前記基地局のセル範囲内における前記特定エリアを記憶する手段と、
前記車両からの要求に応じて前記特定エリアに関する情報を前記広域無線通信により、前記基地局のセル範囲内に存在する車両に配信し、
前記車両から送信されてくる前記車両情報を用いて、同一の特定エリア内に存在する複数の車両を判別し、当該判別された複数の車両について前記車両情報を用いて互いの衝突の可能性を計算し、衝突の可能性が有ると判断された場合には、前記判別された車両に対して警告情報を配信する
ことを特徴とする安全運転支援システム。
【請求項2】
請求項1に記載の安全運転支援システムにおいて、
前記特定エリアに関する情報は、前記基地局のセルに存在する車両が有する車載端末が該基地局に登録処理を行う際に、前記広域無線通信を手段として該基地局から配信されることを特徴とする安全運転支援システム。
【請求項3】
請求項1に記載の安全運転支援システムにおいて、
前記特定エリアは前記処理センターにて、時刻や周囲状況に応じてリアルタイムに再定義できることを特徴とする安全運転支援システム。
【請求項4】
請求項1に記載の安全運転支援システムにおいて、
前記特定エリアにはその危険度に応じた優先順位が定義され、前記処理センターは該優先順位に応じて前記基地局のセルに存在する前記車両との通信の優先順位を決定することを特徴とする安全運転支援システム。
【請求項5】
請求項1に記載の安全運転支援システムにおいて、
前記処理センターは、前記車両から得られる情報を用いて、同一の特定エリア内に存在する複数の車両が衝突する可能性を演算し、複数の車両が衝突する可能性が予め定義された判定値を超えている場合には、当該複数の車両の運転者への前記警告情報として簡易図形を該当車両に配信することを特徴とする安全運転支援システム。
【図1】



【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2010−198260(P2010−198260A)
【公開日】平成22年9月9日(2010.9.9)
【国際特許分類】
【出願番号】特願2009−41639(P2009−41639)
【出願日】平成21年2月25日(2009.2.25)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
【公開日】平成22年9月9日(2010.9.9)
【国際特許分類】
【出願日】平成21年2月25日(2009.2.25)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
[ Back to top ]