
安全運転支援情報配信システム
【課題】より多くの地点についての支援情報を配信できるようにする。
【解決手段】例えば、プローブカーV2の実地検分によって、危険が生じた危険顕在地点とその危険発生形態とが収集され、収集データが危険顕在地点・発生形態データベース7に記憶される。上記危険顕在地点の道路環境の特徴と同様の特徴を有する危険潜在地点がその危険発生形態と共に推定されて、危険可能性地点・発生形態データベース6に記憶される。データベース7に記憶されている危険顕在地点と危険発生形態、およびデータベース6に記憶されている危険潜在地点と危険発生形態とが、支援対象となる車両Vに配信される。
【解決手段】例えば、プローブカーV2の実地検分によって、危険が生じた危険顕在地点とその危険発生形態とが収集され、収集データが危険顕在地点・発生形態データベース7に記憶される。上記危険顕在地点の道路環境の特徴と同様の特徴を有する危険潜在地点がその危険発生形態と共に推定されて、危険可能性地点・発生形態データベース6に記憶される。データベース7に記憶されている危険顕在地点と危険発生形態、およびデータベース6に記憶されている危険潜在地点と危険発生形態とが、支援対象となる車両Vに配信される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、安全運転支援情報配信システムに関するものである。
【背景技術】
【0002】
安全運転の支援のために、道路における危険地点を運転者に知らせることは好ましいものである。特許文献1には、実際に危険事例が生じた地点(事故が生じたりヒヤリとしたりあるいはハットした危険事例が生じた地点)を危険地点としてデータベース化して、データベースに登録されている危険地点に近づいたときに、車両(の運転者)に対して危険地点に近づいていることを報知するものが開示されている。特許文献2には、車両が、過去に生じた事故と同様な事故を生じる可能性のある動作をしたときに、事故発生に関連する情報を車両に報知するものが開示されている。なお、以下の説明では、「ヒヤリとしたりハットしたこと」を「ヒヤリハット」として表現するものとする。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−97345号公報
【特許文献2】特開平4−309810号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
安全運転の支援のためには、情報配信する危険地点の数を多くすることが重要となる。この一方、実際に事故やヒヤリハットが生じたことを実地検分により収集するには多大な時間と困難を伴うものである。すなわち、事故やヒヤリハットが生じる可能性のある危険地点が存在しても、その全てを全て実地検分によって特定することは、事実上不可能に近いものとなる。
【0005】
本発明は以上のような事情を勘案してなされたもので、その目的は、実地検分により収集した危険地点の他に、数多くの危険可能性地点についての情報をも配信できるようにした安全運転支援情報配信システムを提供することにある。
【課題を解決するための手段】
【0006】
前記目的を達成するため、本発明にあっては次のような解決手法を採択してある。すなわち、請求項1に記載のように、
実地検分によって収集された危険事態が生じたあるいは生じる可能性の高い地点を、危険顕在地点として記憶すると共に、その道路環境要因を記憶した第1記憶手段と、
道路環境情報と前記第1記憶手段に記憶されている道路環境要因とに基づいて、前記危険顕在地点と類似する道路環境を有する地点を危険潜在地点として推定する推定手段と、
前記推定手段により推定された前記危険潜在地点を記憶する第2記憶手段と、
前記第1記憶手段に記憶されている危険顕在地点および前記第2記憶手段に記憶されている危険顕在地点が危険である旨の支援情報を車両に配信する支援情報配信手段と、
を備えている、
ようにしてある。上記解決手法によれば、実地検分では得られていない数多くの危険潜在地点についての情報配信を行うことができ、安全運転を支援する上で極めて好ましいものである。
【0007】
上記解決手法を前提とした好ましい態様は、特許請求の範囲における請求項2以下に記載のとおりである。すなわち、
前記第1記憶手段は、前記危険顕在地点の道路環境、前記危険発生態様としての危険発生時刻、危険対象の挙動、自車両の移動方向および自車両の速度の中から選択された少なくとも1つの情報を類型化して記憶しており、
前記推定手段は、前記類型化された情報に基づいて危険発生が予測される地点の特徴を推定して、該推定された特徴を有する地点を前記危険潜在地点として推定する、
ようにしてある(請求項2対応)。この場合、危険潜在地点の特定をより精度よく行う等の上で好ましいものとなる。
【0008】
前記第1記憶手段は、前記危険顕在地点に加えて、実地検分により収集された危険発生形態を合わせて記憶しており、
前記推定手段は、前記危険潜在地点に加えて、前記第1記憶手段に記憶されている記憶内容に基づいて該危険潜在地点で生じる可能性がある危険発生形態を推定し、
前記第2記憶手段は、前記危険潜在地点に対応した危険発生形態をも記憶しており、
前記支援情報配信手段は、前記第1記憶手段、第2記憶手段に記憶されている危険発生形態をも支援情報として車両に配信する、
ようにしてある(請求項3対応)。この場合、危険発生形態についても情報配信することができる。
【0009】
新たに行われる実地検分によって前記第1記憶手段の記憶内容が更新され、
前記第1記憶手段の更新に応じて前記第2記憶手段の記憶内容が更新される、
ようにしてある(請求項4対応)。この場合、実地検分による更新を行って、適切な情報配信を行う上で好ましいものとなり、また危険顕在地点や危険潜在地点をより多くする等の上でも好ましいものとなる。
【0010】
前記危険発生形態として、前記危険顕在地点あるいは前記危険潜在地点への進入時の車両の挙動を含むようにされ、
車両のうち、前記危険顕在地点あるいは前記危険潜在地点に進入する車両の挙動が前記第1記憶手段あるいは第2記憶手段に記憶されている進入時の車両の挙動と一致しているときに、前記支援情報配信手段から支援情報が配信される、
ようにしてある(請求項5対応)。この場合、危険が生じる可能性のある形態で進入する車両に対して適切に支援情報を配信する上で好ましいものとなる。
【0011】
前記推定手段は、前記第1記憶手段に記憶されている前記危険顕在地点についての危険要因と前記第2記憶手段に記憶されている前記危険潜在地点についての危険要因との一致度を合わせて記憶しており、
前記支援情報配信手段は、前記一致度の相違に応じて配信する支援内容を相違させる、
ようにしてある(請求項6対応)。この場合、一致度の高さつまり危険可能性の発生度合に応じた適切な支援内容とする上で好ましいものとなる。
【0012】
前記危険情報配信手段は、前記危険顕在地点と危険潜在地点で配信する支援内容を相違させる、ようにしてある(請求項7対応)。この場合、危険顕在地点と危険潜在地点とに応じた適切な支援内容とする上で好ましいものとなる。
【発明の効果】
【0013】
本発明によれば、数多くの危険可能性地点についての情報をも配信できる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態を示す全体系統図。
【図2】危険発生形態マスタの一例を簡略的に示す図。
【図3】危険道路環境要因マスタの一例を簡略的に示す図。
【図4】危険発生形態・危険道路環境要因対応マスタの一例を簡略的に示す図。
【図5】危険顕在地点と危険潜在地点の一例を示す図。
【図6】情報配信センターの制御例を示すフローチャート。
【図7】情報配信センターの制御例を示すフローチャート。
【図8】情報配信センターの制御例を示すフローチャート。
【図9】情報配信センターの制御例を示すフローチャート。
【図10】情報配信センターの制御例を示すフローチャート。
【図11】情報配信センターの制御例を示すフローチャート。
【図12】情報配信センターの制御例を示すフローチャート。
【図13】情報配信センターの制御例を示すフローチャート。
【図14】情報配信センターの制御例を示すフローチャート。
【図15】情報配信センターの制御例を示すフローチャート。
【発明を実施するための形態】
【0015】
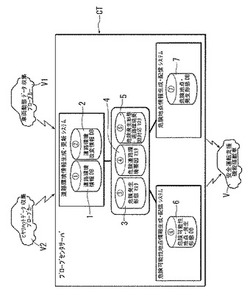
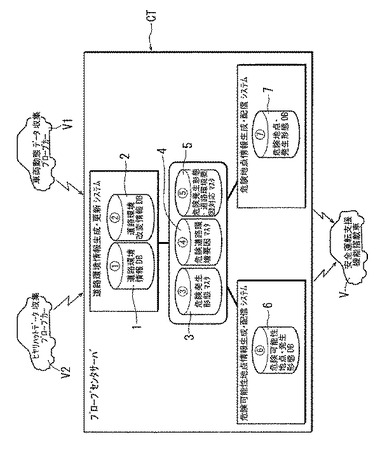
図1において、CTは、安全のための運転支援情報を、運転支援を受ける車両Vに対して配信する情報配信センターである。この情報配信センターCTには、実地検分によって情報収集を行う多数のプローブカーV1,V2により得られた各種情報が入力される。プローブカーV1は、車両動態データを収集するためのもので、例えば、車両の発進・停止時や、一定の時間、あるいは一定の走行距離等で、車両の位置や状態(動態)を収集うるもので、簡易データの収集でよいため台数が極めて多いものである。プローブカーV2は、高機能のデータ収集用となるもので、上記動態データの他に、ヒヤリハットが発生した前後の詳細な車両挙動、運転者の操作、動画像等を収集するものとなっている。このプローブカーV2で得られたデータは、実際に事故やヒヤリハットが生じた危険地点を特定するもので、危険発生形態やその場所の道路環境等の情報も合わせて入手されることになる。プローブカーV2は、高機能のため、プローブカーV1に比して、走行台数は少ないものとなる。
【0016】
情報配信センターCTの機能について概略を説明すると、次のとおりである。まず、プローブカーV2で得られる危険地点の情報(危険顕在地点の情報)は、危険発生形態と共に、支援を受ける車両Vに配信される。ただし、プローブカーV2で得られる危険地点に関する情報は限られたものとなるため、車両Vに対する危険地点の情報配信は限定されたものにならざるを得ないものである。
【0017】
一方、各プローブカーV1、V2で得られる道路情報は豊富である。このため、情報配信センターCTは、後述するように、プローブカーV2で得られた危険地点の道路の特徴を特定(抽出)して、各プローブカーV1、V2で得られた各地点における道路のうち上記特定された特徴を有する(一致するあるいは類似する)地点(道路)を、危険潜在地点として推定する。そして、この危険潜在地点についての情報を、危険潜在地点において発生する可能性のある危険形態と共に、車両Vに配信する。これにより、車両Vに配信される危険地点としては、危険顕在地点と危険潜在地点との両方というように豊富化されることになる。なお、情報配信センターCTは、車両Vや各プローブカーV1、V2とは無線通信によって情報の授受を行うようになっており、車両Vは、情報配信センターCTから配信された情報を運転者に報知する機能を有する(例えばナビゲーション装置のディスプレイやスピーカを利用した画像および/または音声による警報)。
【0018】
次に、情報配信センターCTの詳細について説明する。まず、情報配信センターCTは、道路環境情報データベース1、道路環境改変情報データベース2、危険発生形態マスタ3、危険道路環境要因マスタ4、危険発生形態・道路環境要因対応マスタ5、危険可能性地点・発生形態データベース6、危険地点・発生形態データベース7を有する。
【0019】
道路環境データベース1は、ある地点の道路環境の特徴情報を分類してデータベース化したもので、常に最新のものに更新される。道路環境データベース1に記憶されている内容は、例えば次のものとされる。
(1)単路部について
a.道路構造
通行帯(車線数、歩道、測路帯、2輪車通行帯の、中央分離帯)についての大まかな構造、道路形状(勾配や曲率)、周辺構造物(建物、地形)など。
【0020】
b.信号情報
押しボタン信号の有無や信号サイクル、予告信号の有無や信号サイクルなど。
【0021】
c.規制情報
規制速度(実勢速度)、脇道(非優先路)の有無など。
(2)交差点部について
a.道路構造
交差点形状(大きさ、接続方路数、各方路の接続角度、各方路の通行帯情報)、停止線位置、横断歩道の有無および位置、右折待ちの位置、道路形状(通過経路ごとの勾配、曲率)、周辺構造物(建物、地形)など。
【0022】
b.信号情報
信号有無、信号制御方式(固定サイクル、時間変動、感応式、中央制御など)、各信号パターン(歩行者信号の有無、歩車分離、右直分離、時差式)など。
【0023】
c.規制情報
一時停止規制(信号なしのときで、一時停止が必要な場所であるか否かの区別)、進行方向規制、規制速度(実勢速度)など。
【0024】
道路環境改変情報データベース2は、道路環境の改変情報を記憶しているもので、どの地点でどのように変更があったかを記憶したものである。この道路環境改変情報データベース2のデータに基づいて、道路環境情報データベース1の記憶内容が随時更新される(最新情報に更新)。
【0025】
危険発生形態マスタ3は、事故やヒヤリハットが発生したときの状況(シチュエーション)を類型化したマスタデータである(図2参照)。例えば、自車両の状態(直進中、右折中、右折発進時、左折中など)、交錯対象物(4輪車、2輪車、自転車、歩行者など)、自車両と交錯対象物との位置関係(先行、対向、右から、左からなど)などを記憶している。
【0026】
危険道路環境要因マスタ4は、特定の発生形態の危険事象が多発する場所における道路環境の特徴を、危険要因として抽出したマスタデータである(図3参照)。記憶されている内容は、例えば、単路部についてはカーブしている、勾配がある、速度が高い、歩道が無いなどである。また、交差点部については、交差角度が00度以下、右直分離信号でない、歩車分離信号でない、非優先側の道路が広いなど、である。
【0027】
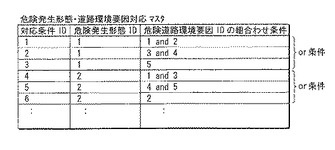
危険発生形態・道路環境要因対応マスタ5は、危険発生形態マスタ3と危険道路環境要因マスタ4との関連付けを行うリレーションデータで、n対mのデータが関連付けられる(図4参照)。例えば、危険発生形態としての「右折発進時に対向直進車両と交錯し易い場所」についての道路環境要因(特徴)として、「片側2車線以上で、対向方路交差角が170度以下で、信号ありの交差点」等として設定される。
【0028】
危険可能性地点・発生形態データベース6は、危険発生形態マスタ3と危険道路環境要因マスタ4と道路環境データベース1とを用いて、事故やヒヤリハットに関するデータが入手できていないが、事故やヒヤリハットを生じる可能性の高いと推定できる場所を特定すると同時に、その場所で注意すべき危険事象の発生形態を推定して、データベース化したものである(危険潜在地点に関するデータベース)。
【0029】
危険地点・発生形態データベース7は、実際に入手された事故やヒヤリハットのデータに基づくもので、事故やヒヤリハットが生じる可能性が高い場所とその場所で注意すべき危険事象の発生形態を特定してデータベース化したものである(危険顕在地点に関するデータベース)。
【0030】
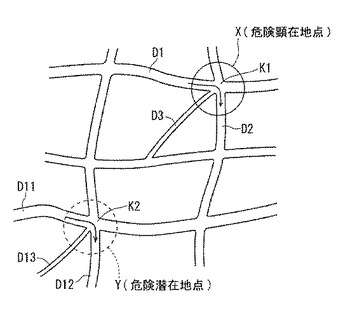
図5は、危険顕在地点Xの一例を示すもので、交差点K1とされている。より具体的には、交差点K1は、大きな(道路幅が大きい)道路D1と大きなD2とが交差すると共に、小さな道路D3が交差する5叉路となっている。プローブカーV2が、道路D1から交差点K1で右折して道路D2に移動しようとしたとき、道路D3からの車両と交錯しそうになってヒヤリハットが生じたものとなっている。この危険顕在地点となる交差点X1の特徴は、大きな道路からの右折時で、かつ大きな道路D2に対して小さな道路D3が死角になり易い90度未満の小さな角度θ1となっていることとされる。
【0031】
一方、交差点X2は、大きな道路D11と大きな道路D12とが交差すると共に、小さな道路D13が交差する5叉路となっている。そして、道路D11に対して道路D13が小さな角度θ2となっており、この角度θ2が前記角度θ1とほぼ同じ角度とされている。情報配信センターCTは、交差点K2での道路の特徴は、危険顕在地点となる交差点K1の特徴を有していることから、危険顕在地点となる交差点とされて、危険事象としては、危険顕在の交差点K1と同様に、「道路D11から右折して道路D12に移動する際に、道路D13からの車両と交錯する」という可能性が対応付けられる。このように、危険顕在地点から危険潜在地点を推定することによって、危険地点に関する情報をより多く車両Vに配信することが可能になる。
【0032】
ここで、情報配信センターCTから車両Vへの情報配信に際しては、危険顕在地点の場合と危険潜在地点の場合とで相違させることができる。例えば、危険潜在地点については、ディスプレイの地図上で、危険潜在地点を点滅表示すると共に、ディスプレイ上に、文字表示でもって可能性のある危険事象を表示するようにされる。これに対して、危険顕在地点については、上記のような表示に加えて、音声によって危険事象を報知するようにされて、危険顕在地点についての注意喚起のレベルが、危険潜在地点についての注意喚起レベルよりも高いものとされる。
【0033】
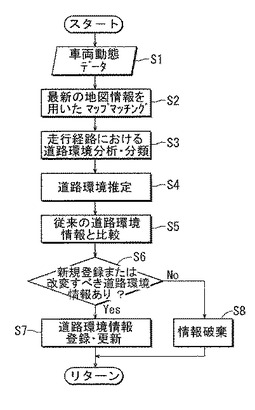
前述したような情報配信センターCTにおける制御の具体例について、図6以下のフローチャートを参照しつつ説明する。なお、以下の説明でSはステップを示す。まず、図6は、道路環境情報データベース1の更新を行う処理となる。すなわち、図6のS1において、プローブカーV1、V2で得られた車両動態データが入力される。次いでS2において、最新の地図情報(道路情報)に基づいて車両V1、V2のマップマッチング(正確な車両位置情報の決定)が行われる。なお、マップマッチングに際しては、最新の道路交通情報を加味するようにしてもよい。この後、S3において、プローブカーV1、V2の走行経路における道路環境の分析、分類が行われ。次いで、S4において、道路環境の推定が行われる。
【0034】
S4の後、S5において、S4で推定された道路環境と道路環境情報データベース1に記憶されている従来の道路環境とが比較される。この後、S6において、新規に登録すべきあるいは改変すべき道路環境情報が存在するか否かが判別される。このS6の判別でYESのときは、S7において、道路環境情報データベース1に記憶されている記憶内容が更新され、また更新したことが道路環境改変データベース2に記憶される。S6の判別でNOのときは、S8において、今回収集されたデータ破棄される(更新なし)。このようにして、道路環境情報データベース1に記憶されている記憶内容が、常に最新のものに更新される。なお、S1〜S4の処理に代えて、最新の地図情報(道路情報)を入力するようにして、S5の処理では、この入力された最新の地図情報と従来の道路環境情報とを比較するようにしてもよい。
【0035】
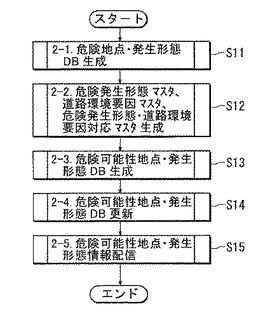
図7は、危険可能性データベース6の更新と配信を行う処理の概要を示すものである。すなわち、S11において、危険地点・発生形態データベース7が生成される。この後、S12において、危険発生形態マスタ3と道路環境要因マスタ4と危険発生形態・道路環境要因対応マスタ5が生成される。この後、S13において、危険可能性地点・発生形態データベース6が生成される。さらに、S14において、危険可能性地点・発生形態データベース6の更新が行われる。この後、S15において、S14で更新された最新のデータベースに基づいて、危険可能性地点と危険発生形態とに関する情報が車両Vに配信される。なお、S11〜S15の詳細については後述する。
【0036】
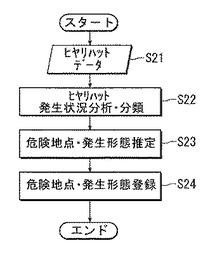
図7のS11の詳細(危険地点・発生形態データベース1の生成)が、図8に示される。すなわち、図8のS21において、プローブカーV2によって得られた事故やヒヤリハットに関する情報が収集(入力)される。この後、S22において、S21で得られたデータから、ヒヤリハットの発生状況の分析、分類が行われる。この後、S23において、上記分析、分類の結果に基づいて危険地点・発生形態が推定される。S23での推定は、例えば、「xx交差点の方路1から方路2への右折時に、対向直進車との交錯に注意が必要」とか、「○○地点へ北東から進入するとき、先行車の追突に注意が必要」とされる。そして、S23において、推定された危険地点と発生形態とが危険地点・発生形態データベース7に登録される。
【0037】
図7のS12の詳細(各マスタ3〜5の生成)が、図9に示される。すなわち、S31において、危険地点・発生形態データベース7と道路環境情報データベース1とから、危険発生地点における発生形態と道路環境との関連が分析される(危険発生形態マスタ3と危険道路環境要因マスタ4との生成であり、図2,図3に示すようなマスタの生成となる)。具体的には、例えば、右折時に対向車と交錯するヒヤリハットが多発する交差点は、例えば次の第1〜第3の3つの道路環境要因のいずれか1つを満たす場合とされる。すなわち、第1に、流入路と対向路との接続角度が120〜170度、または流入路に対する対向路100m区間の平均勾配が−2%以下であるときとされ、第2に、対向路の道路幅が10m以上であるときとされ、第3に完全に右直分離信号でないとき、とされる。また、別の例として、追突のヒヤリハットが発生する単路部は、実勢速度が60km/時のときに、左曲率半径が300m以下のときと、右曲率半径が250m以下のときと、500m区間の平均勾配が−2%以下のときのいずれか1つの条件を満たしたときとされる。S31の後、S32において、S31の結果に基づいて、危険発生形態と道路環境要因とを対応付けてマスタ化される(図4に示すようなマスタの生成となる)。
【0038】
図7のS13の詳細が、図10に示される。すなわち、S41において、道路環境情報データベース1と危険道路環境要因マスタ4とを用いて、危険な道路環境要因がある地点が抽出される。この後、S42において、S41で抽出された地点が危険地点候補データとされる。この後、S43において、危険地点・発生形態データベース7に含まれない地点が抽出される。ここで、膨大な道路環境情報データベース1から、危険発生形態・道路環境要因対応マスタ5の条件でいきなり検索した場合は、処理負荷が極めて大きくなる。このため、実施形態では、まず危険道路環境要因マスタ4を用いた単純検索によって、危険候補地点を絞り込むようにしてある。
【0039】
S43の後、S44において、S43で抽出された地点で起こりやすい危険発生形態が推定される。このS44の処理は、新規危険地点候補が有する危険な道路環境要因の組み合わせとこれに対応する危険発生形態を、危険発生形態・道路環境要因対応マスタ5から検索し、該当する危険発生形態が存在する場合に、当該地点を危険可能性地点とし、その発生形態を注意喚起すべき危険事象とされる。S44の後、S45において、危険可能性地点とその発生形態とが対応付けられて、危険可能性地点・発生形態データベース6に記憶される。
【0040】
図7のS14の詳細が、図11に示される。すなわち、S51において、危険可能性地点における道路環境改変情報が抽出される。この後、S52において、道路環境改変による危険性の変化が評価される。この後、S53において、危険可能性地点において、その危険発生形態が生じる可能性が無くなったか否かが判別される。このS53の判別でYESのときは、S54において、危険が無くなった危険可能性地点が、危険可能性地点・発生形態データベース6から削除される(更新)。上記S53の判別でNOのときは、S54を経ることなく終了される。
【0041】
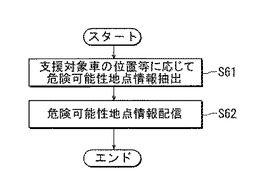
図7のS15の詳細が、図12に示される。すなわち、支援対象となる車両Vの位置等に応じて、危険可能性地点情報が抽出される(車両Vからは現在の位置や車両状況等が情報配信センターCTに対して送信されている)。この後、S62において、危険可能性地点に関する情報が車両Vに対して配信される。
【0042】
図13〜図15は、情報配信センターCTにおける危険地点情報生成とその配信についての具体例を示すものである。まず、図13のS71〜S74の処理が行われる。S71の処理は図7のS11の処理に対応し、S72の処理は、図7のS12の処理に対応している。また、S73の詳細が、図14に示されるが、この図14の処理は図11に対応している。さらに、S74の詳細が図15に示されるが、この図15の処理は図12の処理に対応している。ただし、既述のように、図15におけるS92での注意喚起は、危険顕在地点での注意喚起となるので、図12のS62における危険潜在地点での注意喚起の場合よりも、注意喚起度合が高いものとなる。
【0043】
以上実施形態について説明したが、本発明は、実施形態に限定されるものではなく、特許請求の範囲の記載された範囲において適宜の変更が可能であり、例えば次のような場合をも含むものである。実地検分による事故やヒヤリハットに関する情報収集は、プローブカーを用いる以外に適宜の手法で行うことができ、例えば警察が有する実際に生じた事故のデータに基づく収集や、道路脇での検分者による長時間の観測データに基づく収集とすることもできる。フローチャートに記載された各ステップあるいはステップ群は、その機能に手段の名称を付して表現できるものである。危険潜在地点の推定に際しては、危険地点・発生形態データベース7に、危険顕在地点の道路環境、危険発生態様としての危険発生時刻、危険対象の挙動、自車両の移動方向および自車両の速度情報を類型化して記憶しておき、この類型化された情報に基づいて危険発生が予測される地点の特徴を推定して、この推定された特徴を有する地点を危険潜在地点として推定するのが好ましいものである。
【0044】
危険可能性地点を推定するときに、例えば危険顕在地点での道路環境の特徴との一致度をさらに推定して、この一致度を危険可能性地点・発生形態データベース6に記憶して、車両Vへの支援情報配信の際に、上記一致度の相違に応じて車両Vへの支援内容を変更するようにしてもよい(例えば一致度が高いほど注意喚起度を高くする)。危険発生となった自車両や危険対象の状況と、支援を受ける車両Vやこの車両Vに対する交錯可能性対象物の状況との一致度を推定して、この一致度に応じて、支援内容を変更するようにしてもよい。とりわけ、危険顕在地点あるいは危険潜在地点に進入する車両の挙動を、事故やヒヤリハットを生じた車両の進入形態と比較してその一致度(類似度)をみて、一致度が高いときに支援情報を配信するのが好ましいものである。勿論、本発明の目的は、明記されたものに限らず、実質的に好ましいあるいは利点として表現されたものを提供することをも暗黙的に含むものである。
【産業上の利用可能性】
【0045】
本発明は、車両の安全運転向上のために好適である。
【符号の説明】
【0046】
V:車両(情報配信される車両)
V1:プローブカー(動態情報の収集)
V2:プローブカー(動態情報とヒヤリハットの収集)
CT:情報配信センター
X:危険顕在地点
Y:危険潜在地点
1:道路環境情報データベース
2:道路環境改変情報データベース
3:危険発生形態マス
4:危険道路環境要因マスタ
5:危険発生形態・道路環境要因対応マスタ
6:危険可能性地点・発生形態データベース
7:危険地点・発生形態データベース
【技術分野】
【0001】
本発明は、安全運転支援情報配信システムに関するものである。
【背景技術】
【0002】
安全運転の支援のために、道路における危険地点を運転者に知らせることは好ましいものである。特許文献1には、実際に危険事例が生じた地点(事故が生じたりヒヤリとしたりあるいはハットした危険事例が生じた地点)を危険地点としてデータベース化して、データベースに登録されている危険地点に近づいたときに、車両(の運転者)に対して危険地点に近づいていることを報知するものが開示されている。特許文献2には、車両が、過去に生じた事故と同様な事故を生じる可能性のある動作をしたときに、事故発生に関連する情報を車両に報知するものが開示されている。なお、以下の説明では、「ヒヤリとしたりハットしたこと」を「ヒヤリハット」として表現するものとする。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−97345号公報
【特許文献2】特開平4−309810号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
安全運転の支援のためには、情報配信する危険地点の数を多くすることが重要となる。この一方、実際に事故やヒヤリハットが生じたことを実地検分により収集するには多大な時間と困難を伴うものである。すなわち、事故やヒヤリハットが生じる可能性のある危険地点が存在しても、その全てを全て実地検分によって特定することは、事実上不可能に近いものとなる。
【0005】
本発明は以上のような事情を勘案してなされたもので、その目的は、実地検分により収集した危険地点の他に、数多くの危険可能性地点についての情報をも配信できるようにした安全運転支援情報配信システムを提供することにある。
【課題を解決するための手段】
【0006】
前記目的を達成するため、本発明にあっては次のような解決手法を採択してある。すなわち、請求項1に記載のように、
実地検分によって収集された危険事態が生じたあるいは生じる可能性の高い地点を、危険顕在地点として記憶すると共に、その道路環境要因を記憶した第1記憶手段と、
道路環境情報と前記第1記憶手段に記憶されている道路環境要因とに基づいて、前記危険顕在地点と類似する道路環境を有する地点を危険潜在地点として推定する推定手段と、
前記推定手段により推定された前記危険潜在地点を記憶する第2記憶手段と、
前記第1記憶手段に記憶されている危険顕在地点および前記第2記憶手段に記憶されている危険顕在地点が危険である旨の支援情報を車両に配信する支援情報配信手段と、
を備えている、
ようにしてある。上記解決手法によれば、実地検分では得られていない数多くの危険潜在地点についての情報配信を行うことができ、安全運転を支援する上で極めて好ましいものである。
【0007】
上記解決手法を前提とした好ましい態様は、特許請求の範囲における請求項2以下に記載のとおりである。すなわち、
前記第1記憶手段は、前記危険顕在地点の道路環境、前記危険発生態様としての危険発生時刻、危険対象の挙動、自車両の移動方向および自車両の速度の中から選択された少なくとも1つの情報を類型化して記憶しており、
前記推定手段は、前記類型化された情報に基づいて危険発生が予測される地点の特徴を推定して、該推定された特徴を有する地点を前記危険潜在地点として推定する、
ようにしてある(請求項2対応)。この場合、危険潜在地点の特定をより精度よく行う等の上で好ましいものとなる。
【0008】
前記第1記憶手段は、前記危険顕在地点に加えて、実地検分により収集された危険発生形態を合わせて記憶しており、
前記推定手段は、前記危険潜在地点に加えて、前記第1記憶手段に記憶されている記憶内容に基づいて該危険潜在地点で生じる可能性がある危険発生形態を推定し、
前記第2記憶手段は、前記危険潜在地点に対応した危険発生形態をも記憶しており、
前記支援情報配信手段は、前記第1記憶手段、第2記憶手段に記憶されている危険発生形態をも支援情報として車両に配信する、
ようにしてある(請求項3対応)。この場合、危険発生形態についても情報配信することができる。
【0009】
新たに行われる実地検分によって前記第1記憶手段の記憶内容が更新され、
前記第1記憶手段の更新に応じて前記第2記憶手段の記憶内容が更新される、
ようにしてある(請求項4対応)。この場合、実地検分による更新を行って、適切な情報配信を行う上で好ましいものとなり、また危険顕在地点や危険潜在地点をより多くする等の上でも好ましいものとなる。
【0010】
前記危険発生形態として、前記危険顕在地点あるいは前記危険潜在地点への進入時の車両の挙動を含むようにされ、
車両のうち、前記危険顕在地点あるいは前記危険潜在地点に進入する車両の挙動が前記第1記憶手段あるいは第2記憶手段に記憶されている進入時の車両の挙動と一致しているときに、前記支援情報配信手段から支援情報が配信される、
ようにしてある(請求項5対応)。この場合、危険が生じる可能性のある形態で進入する車両に対して適切に支援情報を配信する上で好ましいものとなる。
【0011】
前記推定手段は、前記第1記憶手段に記憶されている前記危険顕在地点についての危険要因と前記第2記憶手段に記憶されている前記危険潜在地点についての危険要因との一致度を合わせて記憶しており、
前記支援情報配信手段は、前記一致度の相違に応じて配信する支援内容を相違させる、
ようにしてある(請求項6対応)。この場合、一致度の高さつまり危険可能性の発生度合に応じた適切な支援内容とする上で好ましいものとなる。
【0012】
前記危険情報配信手段は、前記危険顕在地点と危険潜在地点で配信する支援内容を相違させる、ようにしてある(請求項7対応)。この場合、危険顕在地点と危険潜在地点とに応じた適切な支援内容とする上で好ましいものとなる。
【発明の効果】
【0013】
本発明によれば、数多くの危険可能性地点についての情報をも配信できる。
【図面の簡単な説明】
【0014】
【図1】本発明の一実施形態を示す全体系統図。
【図2】危険発生形態マスタの一例を簡略的に示す図。
【図3】危険道路環境要因マスタの一例を簡略的に示す図。
【図4】危険発生形態・危険道路環境要因対応マスタの一例を簡略的に示す図。
【図5】危険顕在地点と危険潜在地点の一例を示す図。
【図6】情報配信センターの制御例を示すフローチャート。
【図7】情報配信センターの制御例を示すフローチャート。
【図8】情報配信センターの制御例を示すフローチャート。
【図9】情報配信センターの制御例を示すフローチャート。
【図10】情報配信センターの制御例を示すフローチャート。
【図11】情報配信センターの制御例を示すフローチャート。
【図12】情報配信センターの制御例を示すフローチャート。
【図13】情報配信センターの制御例を示すフローチャート。
【図14】情報配信センターの制御例を示すフローチャート。
【図15】情報配信センターの制御例を示すフローチャート。
【発明を実施するための形態】
【0015】
図1において、CTは、安全のための運転支援情報を、運転支援を受ける車両Vに対して配信する情報配信センターである。この情報配信センターCTには、実地検分によって情報収集を行う多数のプローブカーV1,V2により得られた各種情報が入力される。プローブカーV1は、車両動態データを収集するためのもので、例えば、車両の発進・停止時や、一定の時間、あるいは一定の走行距離等で、車両の位置や状態(動態)を収集うるもので、簡易データの収集でよいため台数が極めて多いものである。プローブカーV2は、高機能のデータ収集用となるもので、上記動態データの他に、ヒヤリハットが発生した前後の詳細な車両挙動、運転者の操作、動画像等を収集するものとなっている。このプローブカーV2で得られたデータは、実際に事故やヒヤリハットが生じた危険地点を特定するもので、危険発生形態やその場所の道路環境等の情報も合わせて入手されることになる。プローブカーV2は、高機能のため、プローブカーV1に比して、走行台数は少ないものとなる。
【0016】
情報配信センターCTの機能について概略を説明すると、次のとおりである。まず、プローブカーV2で得られる危険地点の情報(危険顕在地点の情報)は、危険発生形態と共に、支援を受ける車両Vに配信される。ただし、プローブカーV2で得られる危険地点に関する情報は限られたものとなるため、車両Vに対する危険地点の情報配信は限定されたものにならざるを得ないものである。
【0017】
一方、各プローブカーV1、V2で得られる道路情報は豊富である。このため、情報配信センターCTは、後述するように、プローブカーV2で得られた危険地点の道路の特徴を特定(抽出)して、各プローブカーV1、V2で得られた各地点における道路のうち上記特定された特徴を有する(一致するあるいは類似する)地点(道路)を、危険潜在地点として推定する。そして、この危険潜在地点についての情報を、危険潜在地点において発生する可能性のある危険形態と共に、車両Vに配信する。これにより、車両Vに配信される危険地点としては、危険顕在地点と危険潜在地点との両方というように豊富化されることになる。なお、情報配信センターCTは、車両Vや各プローブカーV1、V2とは無線通信によって情報の授受を行うようになっており、車両Vは、情報配信センターCTから配信された情報を運転者に報知する機能を有する(例えばナビゲーション装置のディスプレイやスピーカを利用した画像および/または音声による警報)。
【0018】
次に、情報配信センターCTの詳細について説明する。まず、情報配信センターCTは、道路環境情報データベース1、道路環境改変情報データベース2、危険発生形態マスタ3、危険道路環境要因マスタ4、危険発生形態・道路環境要因対応マスタ5、危険可能性地点・発生形態データベース6、危険地点・発生形態データベース7を有する。
【0019】
道路環境データベース1は、ある地点の道路環境の特徴情報を分類してデータベース化したもので、常に最新のものに更新される。道路環境データベース1に記憶されている内容は、例えば次のものとされる。
(1)単路部について
a.道路構造
通行帯(車線数、歩道、測路帯、2輪車通行帯の、中央分離帯)についての大まかな構造、道路形状(勾配や曲率)、周辺構造物(建物、地形)など。
【0020】
b.信号情報
押しボタン信号の有無や信号サイクル、予告信号の有無や信号サイクルなど。
【0021】
c.規制情報
規制速度(実勢速度)、脇道(非優先路)の有無など。
(2)交差点部について
a.道路構造
交差点形状(大きさ、接続方路数、各方路の接続角度、各方路の通行帯情報)、停止線位置、横断歩道の有無および位置、右折待ちの位置、道路形状(通過経路ごとの勾配、曲率)、周辺構造物(建物、地形)など。
【0022】
b.信号情報
信号有無、信号制御方式(固定サイクル、時間変動、感応式、中央制御など)、各信号パターン(歩行者信号の有無、歩車分離、右直分離、時差式)など。
【0023】
c.規制情報
一時停止規制(信号なしのときで、一時停止が必要な場所であるか否かの区別)、進行方向規制、規制速度(実勢速度)など。
【0024】
道路環境改変情報データベース2は、道路環境の改変情報を記憶しているもので、どの地点でどのように変更があったかを記憶したものである。この道路環境改変情報データベース2のデータに基づいて、道路環境情報データベース1の記憶内容が随時更新される(最新情報に更新)。
【0025】
危険発生形態マスタ3は、事故やヒヤリハットが発生したときの状況(シチュエーション)を類型化したマスタデータである(図2参照)。例えば、自車両の状態(直進中、右折中、右折発進時、左折中など)、交錯対象物(4輪車、2輪車、自転車、歩行者など)、自車両と交錯対象物との位置関係(先行、対向、右から、左からなど)などを記憶している。
【0026】
危険道路環境要因マスタ4は、特定の発生形態の危険事象が多発する場所における道路環境の特徴を、危険要因として抽出したマスタデータである(図3参照)。記憶されている内容は、例えば、単路部についてはカーブしている、勾配がある、速度が高い、歩道が無いなどである。また、交差点部については、交差角度が00度以下、右直分離信号でない、歩車分離信号でない、非優先側の道路が広いなど、である。
【0027】
危険発生形態・道路環境要因対応マスタ5は、危険発生形態マスタ3と危険道路環境要因マスタ4との関連付けを行うリレーションデータで、n対mのデータが関連付けられる(図4参照)。例えば、危険発生形態としての「右折発進時に対向直進車両と交錯し易い場所」についての道路環境要因(特徴)として、「片側2車線以上で、対向方路交差角が170度以下で、信号ありの交差点」等として設定される。
【0028】
危険可能性地点・発生形態データベース6は、危険発生形態マスタ3と危険道路環境要因マスタ4と道路環境データベース1とを用いて、事故やヒヤリハットに関するデータが入手できていないが、事故やヒヤリハットを生じる可能性の高いと推定できる場所を特定すると同時に、その場所で注意すべき危険事象の発生形態を推定して、データベース化したものである(危険潜在地点に関するデータベース)。
【0029】
危険地点・発生形態データベース7は、実際に入手された事故やヒヤリハットのデータに基づくもので、事故やヒヤリハットが生じる可能性が高い場所とその場所で注意すべき危険事象の発生形態を特定してデータベース化したものである(危険顕在地点に関するデータベース)。
【0030】
図5は、危険顕在地点Xの一例を示すもので、交差点K1とされている。より具体的には、交差点K1は、大きな(道路幅が大きい)道路D1と大きなD2とが交差すると共に、小さな道路D3が交差する5叉路となっている。プローブカーV2が、道路D1から交差点K1で右折して道路D2に移動しようとしたとき、道路D3からの車両と交錯しそうになってヒヤリハットが生じたものとなっている。この危険顕在地点となる交差点X1の特徴は、大きな道路からの右折時で、かつ大きな道路D2に対して小さな道路D3が死角になり易い90度未満の小さな角度θ1となっていることとされる。
【0031】
一方、交差点X2は、大きな道路D11と大きな道路D12とが交差すると共に、小さな道路D13が交差する5叉路となっている。そして、道路D11に対して道路D13が小さな角度θ2となっており、この角度θ2が前記角度θ1とほぼ同じ角度とされている。情報配信センターCTは、交差点K2での道路の特徴は、危険顕在地点となる交差点K1の特徴を有していることから、危険顕在地点となる交差点とされて、危険事象としては、危険顕在の交差点K1と同様に、「道路D11から右折して道路D12に移動する際に、道路D13からの車両と交錯する」という可能性が対応付けられる。このように、危険顕在地点から危険潜在地点を推定することによって、危険地点に関する情報をより多く車両Vに配信することが可能になる。
【0032】
ここで、情報配信センターCTから車両Vへの情報配信に際しては、危険顕在地点の場合と危険潜在地点の場合とで相違させることができる。例えば、危険潜在地点については、ディスプレイの地図上で、危険潜在地点を点滅表示すると共に、ディスプレイ上に、文字表示でもって可能性のある危険事象を表示するようにされる。これに対して、危険顕在地点については、上記のような表示に加えて、音声によって危険事象を報知するようにされて、危険顕在地点についての注意喚起のレベルが、危険潜在地点についての注意喚起レベルよりも高いものとされる。
【0033】
前述したような情報配信センターCTにおける制御の具体例について、図6以下のフローチャートを参照しつつ説明する。なお、以下の説明でSはステップを示す。まず、図6は、道路環境情報データベース1の更新を行う処理となる。すなわち、図6のS1において、プローブカーV1、V2で得られた車両動態データが入力される。次いでS2において、最新の地図情報(道路情報)に基づいて車両V1、V2のマップマッチング(正確な車両位置情報の決定)が行われる。なお、マップマッチングに際しては、最新の道路交通情報を加味するようにしてもよい。この後、S3において、プローブカーV1、V2の走行経路における道路環境の分析、分類が行われ。次いで、S4において、道路環境の推定が行われる。
【0034】
S4の後、S5において、S4で推定された道路環境と道路環境情報データベース1に記憶されている従来の道路環境とが比較される。この後、S6において、新規に登録すべきあるいは改変すべき道路環境情報が存在するか否かが判別される。このS6の判別でYESのときは、S7において、道路環境情報データベース1に記憶されている記憶内容が更新され、また更新したことが道路環境改変データベース2に記憶される。S6の判別でNOのときは、S8において、今回収集されたデータ破棄される(更新なし)。このようにして、道路環境情報データベース1に記憶されている記憶内容が、常に最新のものに更新される。なお、S1〜S4の処理に代えて、最新の地図情報(道路情報)を入力するようにして、S5の処理では、この入力された最新の地図情報と従来の道路環境情報とを比較するようにしてもよい。
【0035】
図7は、危険可能性データベース6の更新と配信を行う処理の概要を示すものである。すなわち、S11において、危険地点・発生形態データベース7が生成される。この後、S12において、危険発生形態マスタ3と道路環境要因マスタ4と危険発生形態・道路環境要因対応マスタ5が生成される。この後、S13において、危険可能性地点・発生形態データベース6が生成される。さらに、S14において、危険可能性地点・発生形態データベース6の更新が行われる。この後、S15において、S14で更新された最新のデータベースに基づいて、危険可能性地点と危険発生形態とに関する情報が車両Vに配信される。なお、S11〜S15の詳細については後述する。
【0036】
図7のS11の詳細(危険地点・発生形態データベース1の生成)が、図8に示される。すなわち、図8のS21において、プローブカーV2によって得られた事故やヒヤリハットに関する情報が収集(入力)される。この後、S22において、S21で得られたデータから、ヒヤリハットの発生状況の分析、分類が行われる。この後、S23において、上記分析、分類の結果に基づいて危険地点・発生形態が推定される。S23での推定は、例えば、「xx交差点の方路1から方路2への右折時に、対向直進車との交錯に注意が必要」とか、「○○地点へ北東から進入するとき、先行車の追突に注意が必要」とされる。そして、S23において、推定された危険地点と発生形態とが危険地点・発生形態データベース7に登録される。
【0037】
図7のS12の詳細(各マスタ3〜5の生成)が、図9に示される。すなわち、S31において、危険地点・発生形態データベース7と道路環境情報データベース1とから、危険発生地点における発生形態と道路環境との関連が分析される(危険発生形態マスタ3と危険道路環境要因マスタ4との生成であり、図2,図3に示すようなマスタの生成となる)。具体的には、例えば、右折時に対向車と交錯するヒヤリハットが多発する交差点は、例えば次の第1〜第3の3つの道路環境要因のいずれか1つを満たす場合とされる。すなわち、第1に、流入路と対向路との接続角度が120〜170度、または流入路に対する対向路100m区間の平均勾配が−2%以下であるときとされ、第2に、対向路の道路幅が10m以上であるときとされ、第3に完全に右直分離信号でないとき、とされる。また、別の例として、追突のヒヤリハットが発生する単路部は、実勢速度が60km/時のときに、左曲率半径が300m以下のときと、右曲率半径が250m以下のときと、500m区間の平均勾配が−2%以下のときのいずれか1つの条件を満たしたときとされる。S31の後、S32において、S31の結果に基づいて、危険発生形態と道路環境要因とを対応付けてマスタ化される(図4に示すようなマスタの生成となる)。
【0038】
図7のS13の詳細が、図10に示される。すなわち、S41において、道路環境情報データベース1と危険道路環境要因マスタ4とを用いて、危険な道路環境要因がある地点が抽出される。この後、S42において、S41で抽出された地点が危険地点候補データとされる。この後、S43において、危険地点・発生形態データベース7に含まれない地点が抽出される。ここで、膨大な道路環境情報データベース1から、危険発生形態・道路環境要因対応マスタ5の条件でいきなり検索した場合は、処理負荷が極めて大きくなる。このため、実施形態では、まず危険道路環境要因マスタ4を用いた単純検索によって、危険候補地点を絞り込むようにしてある。
【0039】
S43の後、S44において、S43で抽出された地点で起こりやすい危険発生形態が推定される。このS44の処理は、新規危険地点候補が有する危険な道路環境要因の組み合わせとこれに対応する危険発生形態を、危険発生形態・道路環境要因対応マスタ5から検索し、該当する危険発生形態が存在する場合に、当該地点を危険可能性地点とし、その発生形態を注意喚起すべき危険事象とされる。S44の後、S45において、危険可能性地点とその発生形態とが対応付けられて、危険可能性地点・発生形態データベース6に記憶される。
【0040】
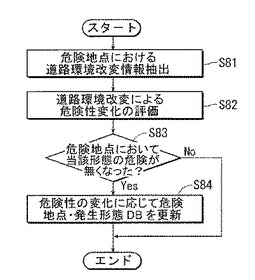
図7のS14の詳細が、図11に示される。すなわち、S51において、危険可能性地点における道路環境改変情報が抽出される。この後、S52において、道路環境改変による危険性の変化が評価される。この後、S53において、危険可能性地点において、その危険発生形態が生じる可能性が無くなったか否かが判別される。このS53の判別でYESのときは、S54において、危険が無くなった危険可能性地点が、危険可能性地点・発生形態データベース6から削除される(更新)。上記S53の判別でNOのときは、S54を経ることなく終了される。
【0041】
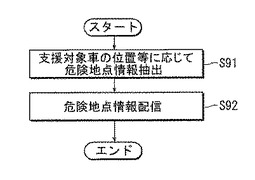
図7のS15の詳細が、図12に示される。すなわち、支援対象となる車両Vの位置等に応じて、危険可能性地点情報が抽出される(車両Vからは現在の位置や車両状況等が情報配信センターCTに対して送信されている)。この後、S62において、危険可能性地点に関する情報が車両Vに対して配信される。
【0042】
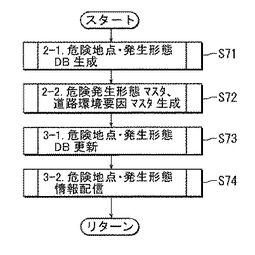
図13〜図15は、情報配信センターCTにおける危険地点情報生成とその配信についての具体例を示すものである。まず、図13のS71〜S74の処理が行われる。S71の処理は図7のS11の処理に対応し、S72の処理は、図7のS12の処理に対応している。また、S73の詳細が、図14に示されるが、この図14の処理は図11に対応している。さらに、S74の詳細が図15に示されるが、この図15の処理は図12の処理に対応している。ただし、既述のように、図15におけるS92での注意喚起は、危険顕在地点での注意喚起となるので、図12のS62における危険潜在地点での注意喚起の場合よりも、注意喚起度合が高いものとなる。
【0043】
以上実施形態について説明したが、本発明は、実施形態に限定されるものではなく、特許請求の範囲の記載された範囲において適宜の変更が可能であり、例えば次のような場合をも含むものである。実地検分による事故やヒヤリハットに関する情報収集は、プローブカーを用いる以外に適宜の手法で行うことができ、例えば警察が有する実際に生じた事故のデータに基づく収集や、道路脇での検分者による長時間の観測データに基づく収集とすることもできる。フローチャートに記載された各ステップあるいはステップ群は、その機能に手段の名称を付して表現できるものである。危険潜在地点の推定に際しては、危険地点・発生形態データベース7に、危険顕在地点の道路環境、危険発生態様としての危険発生時刻、危険対象の挙動、自車両の移動方向および自車両の速度情報を類型化して記憶しておき、この類型化された情報に基づいて危険発生が予測される地点の特徴を推定して、この推定された特徴を有する地点を危険潜在地点として推定するのが好ましいものである。
【0044】
危険可能性地点を推定するときに、例えば危険顕在地点での道路環境の特徴との一致度をさらに推定して、この一致度を危険可能性地点・発生形態データベース6に記憶して、車両Vへの支援情報配信の際に、上記一致度の相違に応じて車両Vへの支援内容を変更するようにしてもよい(例えば一致度が高いほど注意喚起度を高くする)。危険発生となった自車両や危険対象の状況と、支援を受ける車両Vやこの車両Vに対する交錯可能性対象物の状況との一致度を推定して、この一致度に応じて、支援内容を変更するようにしてもよい。とりわけ、危険顕在地点あるいは危険潜在地点に進入する車両の挙動を、事故やヒヤリハットを生じた車両の進入形態と比較してその一致度(類似度)をみて、一致度が高いときに支援情報を配信するのが好ましいものである。勿論、本発明の目的は、明記されたものに限らず、実質的に好ましいあるいは利点として表現されたものを提供することをも暗黙的に含むものである。
【産業上の利用可能性】
【0045】
本発明は、車両の安全運転向上のために好適である。
【符号の説明】
【0046】
V:車両(情報配信される車両)
V1:プローブカー(動態情報の収集)
V2:プローブカー(動態情報とヒヤリハットの収集)
CT:情報配信センター
X:危険顕在地点
Y:危険潜在地点
1:道路環境情報データベース
2:道路環境改変情報データベース
3:危険発生形態マス
4:危険道路環境要因マスタ
5:危険発生形態・道路環境要因対応マスタ
6:危険可能性地点・発生形態データベース
7:危険地点・発生形態データベース
【特許請求の範囲】
【請求項1】
実地検分によって収集された危険事態が生じたあるいは生じる可能性の高い地点を、危険顕在地点として記憶すると共に、その道路環境要因を記憶した第1記憶手段と、
道路環境情報と前記第1記憶手段に記憶されている道路環境要因とに基づいて、前記危険顕在地点と類似する道路環境を有する地点を危険潜在地点として推定する推定手段と、
前記推定手段により推定された前記危険潜在地点を記憶する第2記憶手段と、
前記第1記憶手段に記憶されている危険顕在地点および前記第2記憶手段に記憶されている危険顕在地点が危険である旨の支援情報を車両に配信する支援情報配信手段と、
を備えていることを特徴とする安全運転支援情報配信システム。
【請求項2】
請求項1において、
前記第1記憶手段は、前記危険顕在地点の道路環境、前記危険発生態様としての危険発生時刻、危険対象の挙動、自車両の移動方向および自車両の速度の中から選択された少なくとも1つの情報を類型化して記憶しており、
前記推定手段は、前記類型化された情報に基づいて危険発生が予測される地点の特徴を推定して、該推定された特徴を有する地点を前記危険潜在地点として推定する、
ことを特徴とする安全運転支援情報配信システム。
【請求項3】
請求項1または請求項2において、
前記第1記憶手段は、前記危険顕在地点に加えて、実地検分により収集された危険発生形態を合わせて記憶しており、
前記推定手段は、前記危険潜在地点に加えて、前記第1記憶手段に記憶されている記憶内容に基づいて該危険潜在地点で生じる可能性がある危険発生形態を推定し、
前記第2記憶手段は、前記危険潜在地点に対応した危険発生形態をも記憶しており、
前記支援情報配信手段は、前記第1記憶手段、第2記憶手段に記憶されている危険発生形態をも支援情報として車両に配信する、
ことを特徴とする安全運転支援情報配信システム。
【請求項4】
請求項1ないし請求項3のいずれか1項において、
新たに行われる実地検分によって前記第1記憶手段の記憶内容が更新され、
前記第1記憶手段の更新に応じて前記第2記憶手段の記憶内容が更新される、
ことを特徴とする安全運転支援情報配信システム。
【請求項5】
請求項3において、
前記危険発生形態として、前記危険顕在地点あるいは前記危険潜在地点への進入時の車両の挙動を含むようにされ、
車両のうち、前記危険顕在地点あるいは前記危険潜在地点に進入する車両の挙動が前記第1記憶手段あるいは第2記憶手段に記憶されている進入時の車両の挙動と一致しているときに、前記支援情報配信手段から支援情報が配信される、
ことを特徴とする安全運転支援情報配信システム。
【請求項6】
請求項1ないし請求項5のいずれか1項において、
前記推定手段は、前記第1記憶手段に記憶されている前記危険顕在地点についての危険要因と前記第2記憶手段に記憶されている前記危険潜在地点についての危険要因との一致度を合わせて記憶しており、
前記支援情報配信手段は、前記一致度の相違に応じて配信する支援内容を相違させる、
ことを特徴とする安全運転支援情報配信システム。
【請求項7】
請求項1ないし請求項6のいずれか1項において、
前記危険情報配信手段は、前記危険顕在地点と危険潜在地点で配信する支援内容を相違させる、ことを特徴とする安全運転支援情報配信システム。
【請求項1】
実地検分によって収集された危険事態が生じたあるいは生じる可能性の高い地点を、危険顕在地点として記憶すると共に、その道路環境要因を記憶した第1記憶手段と、
道路環境情報と前記第1記憶手段に記憶されている道路環境要因とに基づいて、前記危険顕在地点と類似する道路環境を有する地点を危険潜在地点として推定する推定手段と、
前記推定手段により推定された前記危険潜在地点を記憶する第2記憶手段と、
前記第1記憶手段に記憶されている危険顕在地点および前記第2記憶手段に記憶されている危険顕在地点が危険である旨の支援情報を車両に配信する支援情報配信手段と、
を備えていることを特徴とする安全運転支援情報配信システム。
【請求項2】
請求項1において、
前記第1記憶手段は、前記危険顕在地点の道路環境、前記危険発生態様としての危険発生時刻、危険対象の挙動、自車両の移動方向および自車両の速度の中から選択された少なくとも1つの情報を類型化して記憶しており、
前記推定手段は、前記類型化された情報に基づいて危険発生が予測される地点の特徴を推定して、該推定された特徴を有する地点を前記危険潜在地点として推定する、
ことを特徴とする安全運転支援情報配信システム。
【請求項3】
請求項1または請求項2において、
前記第1記憶手段は、前記危険顕在地点に加えて、実地検分により収集された危険発生形態を合わせて記憶しており、
前記推定手段は、前記危険潜在地点に加えて、前記第1記憶手段に記憶されている記憶内容に基づいて該危険潜在地点で生じる可能性がある危険発生形態を推定し、
前記第2記憶手段は、前記危険潜在地点に対応した危険発生形態をも記憶しており、
前記支援情報配信手段は、前記第1記憶手段、第2記憶手段に記憶されている危険発生形態をも支援情報として車両に配信する、
ことを特徴とする安全運転支援情報配信システム。
【請求項4】
請求項1ないし請求項3のいずれか1項において、
新たに行われる実地検分によって前記第1記憶手段の記憶内容が更新され、
前記第1記憶手段の更新に応じて前記第2記憶手段の記憶内容が更新される、
ことを特徴とする安全運転支援情報配信システム。
【請求項5】
請求項3において、
前記危険発生形態として、前記危険顕在地点あるいは前記危険潜在地点への進入時の車両の挙動を含むようにされ、
車両のうち、前記危険顕在地点あるいは前記危険潜在地点に進入する車両の挙動が前記第1記憶手段あるいは第2記憶手段に記憶されている進入時の車両の挙動と一致しているときに、前記支援情報配信手段から支援情報が配信される、
ことを特徴とする安全運転支援情報配信システム。
【請求項6】
請求項1ないし請求項5のいずれか1項において、
前記推定手段は、前記第1記憶手段に記憶されている前記危険顕在地点についての危険要因と前記第2記憶手段に記憶されている前記危険潜在地点についての危険要因との一致度を合わせて記憶しており、
前記支援情報配信手段は、前記一致度の相違に応じて配信する支援内容を相違させる、
ことを特徴とする安全運転支援情報配信システム。
【請求項7】
請求項1ないし請求項6のいずれか1項において、
前記危険情報配信手段は、前記危険顕在地点と危険潜在地点で配信する支援内容を相違させる、ことを特徴とする安全運転支援情報配信システム。
【図1】


【図2】

【図3】

【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】

【図11】

【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−114365(P2013−114365A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−258473(P2011−258473)
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000003137)マツダ株式会社 (6,115)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000003137)マツダ株式会社 (6,115)
【Fターム(参考)】
[ Back to top ]