
安全運転診断装置
【課題】交差点において安全確認をしていないにもかかわらず安全確認をしたと誤判定すること、及び安全確認をしたにもかかわらず安全確認をしていないと誤判定することを低減することができる安全運転診断装置を提供すること。
【解決手段】自車両Cが交差点の進入位置から2[m]より長く進入した時点以前の5[s]間の水平角信号をサンプリングする(S10〜S16)。また、その5[s]前の前後における水平角の平均の絶対値を算出して、その絶対値が所定値以上である場合は、サンプリング部13aにてサンプリングした水平角信号を加工する(S17、S18)。そして、サンプリングした水平角信号からパワースペクトルを計算すると共に、0.2〜1.5Hzにおけるパワーの極大値の総和を計算して、この総和と判定値を比較して、ドライバによる安全確認がなされたか否かを判定する(S19〜21)。
【解決手段】自車両Cが交差点の進入位置から2[m]より長く進入した時点以前の5[s]間の水平角信号をサンプリングする(S10〜S16)。また、その5[s]前の前後における水平角の平均の絶対値を算出して、その絶対値が所定値以上である場合は、サンプリング部13aにてサンプリングした水平角信号を加工する(S17、S18)。そして、サンプリングした水平角信号からパワースペクトルを計算すると共に、0.2〜1.5Hzにおけるパワーの極大値の総和を計算して、この総和と判定値を比較して、ドライバによる安全確認がなされたか否かを判定する(S19〜21)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、安全運転診断装置に関するものである。
【背景技術】
【0002】
従来、交差点を通過する際におけるドライバの安全確認の有無を判定する技術の一例として、特許文献1に示される車両用情報報知装置があった。
【0003】
特許文献1に示される車両用情報報知装置は、交差点の幾何学的形態に応じて左方向、右方向それぞれに基準角度を定め、顔向きまたは視線が基準角度を超えたか否か、または顔向きまたは視線が基準角度を超えた積算時間が所定時間を越えたか否かにより、安全確認を判定するものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−227905号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に示される車両用情報報知装置においては、顔向きまたは視線が基準角度を超えたか否かによって安全確認を判定する場合、安全確認時間が短すぎると、安全確認していないにもかかわらず安全確認したと誤判定する可能性がある。例えば、視線(又は顔向き)が約0.1秒間左方向の所定角を越え、続いて約0.1秒間右方向の所定角を越えた後に交差点に進入した場合を考える。この場合、特許文献1に示される車両用情報報知装置では安全確認したと判定する。しかしながら、約0.1秒という短時間では安全確認できないことがある。よって、安全確認ができていないにもかかわらず確認したと誤判定する可能性がある。
【0006】
また、顔向きまたは視線が基準角度を超えた積算時間が所定時間を越えたか否かによって安全確認を判定する場合、安全確認時間が長すぎると、安全確認していないにもかかわらず安全確認したと誤判定する可能性がある。例えば、視線(又は顔向き)が約5秒間左方向の所定角度を越え、続いて約5秒間右方向の所定角度を越えた後に交差点に進入した場合を考える。この場合、特許文献1に示される車両用情報報知装置では安全確認したと判定する。しかしながら、右方向の確認を終えた時点で、左方向の確認終了後約5秒の時間が経過している。この間に前回の左方向の確認後に交差路に入ってきた車が交差点に接近している可能性がある。したがって、安全確認したとはいえない。
【0007】
また、交差点通過時は、交差点の左方向、右方向それぞれの基準角度で挟まれる領域の安全確認も必要である。しかし、特許文献1に示される車両用情報報知装置は、この領域の安全確認方法を規定していない。安全確認をしたといえるためには、この領域への所定時間以上視線の停留が必要である。
【0008】
本発明は、上記問題点に鑑みなされたものであり、誤判定を低減することができる安全運転診断装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために請求項1に記載の安全運転診断装置は、車両が交差点に進入する際に、車両のドライバによる安全確認がなされたか否かを判定するものであって、
車両の現在位置を取得する自車位置取得手段と、
直近の信号の無い交差点の進入位置を取得する進入位置取得手段と、
車両の運転席付近の固定点を原点とする直交座標系で検出されたドライバの視線の水平角を取得する水平角取得手段と、
車両が進入位置取得手段にて取得した進入位置から所定距離より長く進入した時点から過去所定時間にわたる水平角をサンプリングするサンプリング手段と、
過去所定時間前の前後所定期間にわたる水平角の平均の絶対値が所定値以上である場合、過去所定時間前の水平角を0とし、過去所定時間の所定期間後の水平角がサンプリング手段にてサンプリングした水平角となるように、サンプリング手段にてサンプリングした水平角を加工する加工手段と、
その絶対値が所定値以上である場合は加工手段による加工後の水平角からパワースペクトルを計算し、絶対値が所定値以上でない場合はサンプリング手段にてサンプリングされた水平角からパワースペクトルを計算するパワースペクトル計算手段と、
パワースペクトル計算手段にて算出したパワースペクトルにおいて、安全確認に必要な水平角の変化の周波数範囲におけるパワーの極大値の和が所定値に達してない場合はドライバによる安全確認がなされてないと判定し、所定値以上である場合はドライバによる安全確認がなされたと判定する安全確認判定手段と、を備えることを特徴とするものである。
【0010】
一般に、ある時間区間でサンプリングした信号において、所定周波数の振幅の大小は、信号のパワースペクトルの所定周波数でのパワーの大小に表れる。また、所定周波数の繰り返し数の大小もパワーの大小に表れる。逆に、パワースペクトルにおいて所定周波数のパワー値が大きいほど、信号の所定周波数の振幅が大きいか、または信号の所定周波数での繰り返し数が多い。
【0011】
従って、安全確認動作時の視線の水平角の絶対値が0[deg]から90[deg]に近づけば近づくほど水平角の変化の周波数における所定範囲のパワーは大きくなる。また、安全確認動作の回数が増えれば増えるほど水平角の変化の周波数における所定範囲のパワーは大きくなる。よって、安全確認に必要な水平角の変化の周波数範囲におけるパワーの極大値の和が所定値以上である場合は、視線の水平角の絶対値は安全上十分、もしくは、安全確認回数は安全上十分であるとみなすことができる。つまり、ドライバは、安全確認に必要な範囲(確認幅)を確認したか、もしくは、安全確認動作を必要回数行ったとみなすことができる。
【0012】
一方、安全確認すべき最小範囲を安全確認する場合、正面、左方向(右方向)、右方向(左方向)、正面の順で視線を動かして、この4箇所を認知するのに必要な時間は、1周期の変化に必要な時間である。従って、この4箇所を認知するのに要する時間は、安全確認に必要な水平角の変化の周波数(範囲)に置き換えることができる。
【0013】
従って、請求項1に示すように、安全確認に必要な水平角の変化の周波数範囲におけるパワーの極大値の和が所定値以上である場合、安全確認のための必要条件である確認時間(確認周波数)と確認幅を満たしたとみなすことができる。よって、交差点において安全確認をしていないにもかかわらず、安全確認をしたと誤判定することを低減することができる。
【0014】
また、例えば、所定時間内に、ドライバがまず交差路を通行する他車を視認し、他車が通行した後に視線をほとんど移動させることなく他車が接近して来た方向を安全確認し、次に他車が接近して来た方向でない方向(言い換えると他車が遠ざかって行った方向)を確認し、さらに、その次に交差点に進入した場合を考える。ここで、他車は交差路を自車から見て左から右へ又は右から左へ通行するので、他車が通行した直後の視線水平角(言い換えると安全確認開始時点の視線の水平角)は、おおよそ0[deg]でなく左方向の所定角または右方向所定角である。
【0015】
この場合、サンプリングした視線の水平角は、左方向の所定角からはじまり右方向の所定角度以上に変化し、その後におおよそ0[deg]になるか、又は右方向の所定角から左方向の所定角度以上に変化し、その後におおよそ0[deg]になる。したがって、サンプリングした視線の水平角の波形の左端(即ちサンプリング初期)は、おおよそ0[deg]になっていない。したがって、サンプリングした視線の水平角が1周期に満たず、4分の3周期となる。4分の3周期の波形のパワースペクトルを計算すると、安全確認で想定できる所定周波数範囲に所定値以上の極大値を持たないことがある。即ち、ドライバは安全確認したにもかかわらず、安全確認がなされていないと判定する問題が発生することがある。
【0016】
そこで、請求項1においては、パワースペクトルを計算する際の水平角は、上述のように加工しているため、水平角のサンプリングを開始した時点付近の水平角が所定値以上である場合は1/4周期が付け加えられることになる。このように加工すると、安全確認がなされたならば、その時間内に水平角が1周期変化する部分を最低1つ含むようになる。言い換えると、視線水平角は、0[deg]から始まり左方向の所定角以上に変化し、次に右方向の所定角度以上に変化し、その後におおよそ0[deg]になるか、または0[deg]から始まり右方向の所定角以上に変化し、次に左方向の所定角度以上に変化し、その後におおよそ0[deg]になる。このように加工した水平角のパワースペクトルを計算すると、安全確認で想定できる所定周波数範囲にパワーの極大値を持ち、極大値の和は所定値以上となる。したがって、安全確認がなされたと判定することができる。
【0017】
よって、請求項1においては、安全確認開始時点での視線の水平角がドライバのおおよそ正面方向でなかった場合に、交差点において安全確認をしたにもかかわらず、安全確認をしてないと誤判定することを低減することができる。
【0018】
また、サンプリングする期間は、請求項2に示すように、進入位置から所定距離より長く進入した時点から過去5秒間とすると好ましい。また、水平角の加工を行う期間は、請求項3に示すように、過去所定時間前から0.7秒間とすると好ましい。
【0019】
また、請求項4に示すように、安全確認判定手段にて安全確認がなされていないと判定した場合は、視線の水平角、車両前方画像データ、及びセンサデータをデータ記憶媒体に記憶することによって、ドライバの間違った思い込みやドライバの運転のくせを直すための情報を、ドライバに提供することが可能となるので好ましい。
【0020】
また、請求項5に示すように、車両前方画像に、視線の水平角及びセンサデータを重畳させた画像(運転診断画像)を表示装置に表示することによって、実際の運転に近い状況を再現することができるので好ましい。
【0021】
また、ドライバは、車両を駐車場(特に、自宅や職場の駐車場)に停車させたときは、心理的に余裕がある場合が多い。そこで、請求項6に示すように、画像の表示指示がなされ、かつ、車両が駐車場に停車した場合に、画像を表示装置に表示することによって、心理的に余裕があるライバに対して、ドライバの間違った思い込みやドライバの運転のくせを直すための情報(運転診断画像)を提供することができるので好ましい。
【図面の簡単な説明】
【0022】
【図1】本発明の実施の形態における安全運転診断ECUの概略構成を示すブロック図である。
【図2】本発明の実施の形態における安全確認すべき最小範囲を示すイメージ図である。
【図3】本発明の実施の形態における安全確認すべき最小範囲を認知するために必要な視線の停留箇所を示すイメージ図である。
【図4】本発明の実施の形態における視線の水平角をサンプリングする範囲を示すイメージ図である。
【図5】本発明の実施の形態における安全運転診断ECUの安全確認判定処理動作を示すフローチャートである。
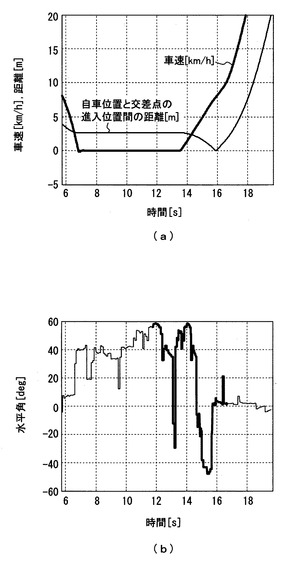
【図6】(a)は自車位置と交差点の進入位置間の距離[m]と時間[s]との関係を示すグラフであり(b)は図6(a)に対応する視線の水平角[deg]と時間[s]との関係を示すグラフである。
【図7】(a)は交差路に他車の通行無し(つまり、他車の視認なし)でドライバによる安全確認がなされた時の自車位置と交差点の進入位置間の距離[m]と時間[s]との関係を示すグラフであり、(b)は、図7(a)に対応する視線の水平角[deg]と時間[s]との関係を示すグラフである(加工なし)。
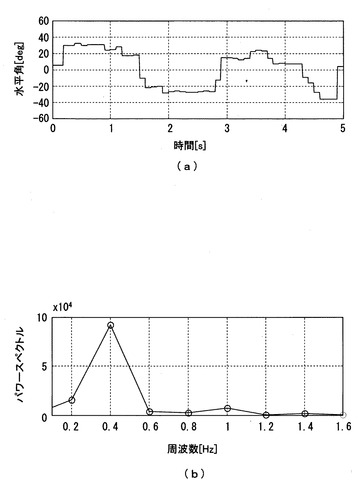
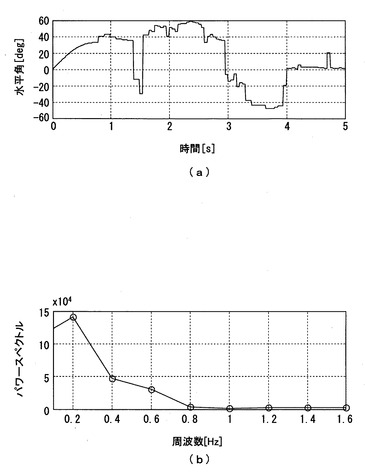
【図8】(a)は図7(b)を部分的に拡大したグラフであり、(b)はこのときのパワースペクトルと周波数[Hz]の関係を示すグラフである。
【図9】(a)は交差路に他車の通行有りかつその他者の視認有りの場合であり、ドライバによる安全確認がなされた時の自車位置と交差点の進入位置間の距離[m]と時間[s]との関係を示すグラフであり、(b)は図9(a)に対応する視線の水平角[deg]と時間[s]との関係を示すものであり、水平角の加工なしの場合のグラフである。
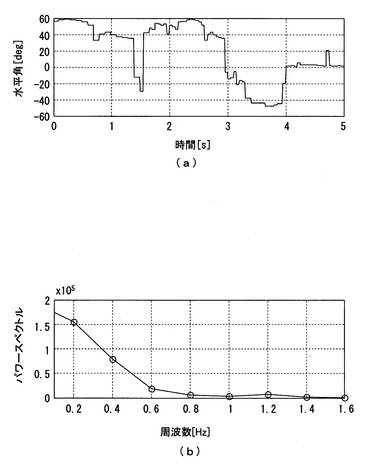
【図10】(a)は図9(b)を部分的に拡大したグラフであり、(b)はこのときのパワースペクトルと周波数[Hz]の関係を示すグラフである。
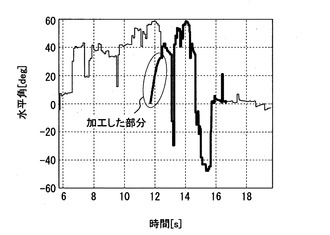
【図11】図9(a)に対応する視線の水平角[deg]と時間[s]との関係を示すものであり、水平角の加工ありの場合のグラフである。
【図12】(a)は図11(a)を部分的に拡大したグラフであり、(b)はこのときのパワースペクトルと周波数[Hz]の関係を示すグラフである。
【発明を実施するための形態】
【0023】
以下、本発明の実施の形態を図に基づいて説明する。
【0024】
図1に示すように、本実施の形態における安全運転診断ECU(Electronic Control Unit;電子制御装置)10は、本発明の安全運転診断装置に相当するものである。
【0025】
このような構成を備える安全運転診断ECU10は、車両(以下、自車両Cとも称する、また図面では自車とも称する)が交差点に進入する際に、車両のドライバによる安全確認がなされたか否かを判定すると共に、ドライバの間違った思い込みやドライバの運転のくせを直すための情報をドライバに提供する車載システムに適用することができる。なお、本実施の形態においては、交差点は、信号機のない平面交差の交差点であり、丁字路、十字路を示すものとする。
【0026】
安全運転診断ECU10は、通常のコンピュータとして構成されており、例えば、周知の中央演算処理装置(Central Processing Unit:略称CPU)、ROM(Read-Only Memory)、RAM(Random Access Memory)、入出力装置(Input and Output device:略称I/O)およびこれらの構成を接続するバスラインなどが備えられている。図1においては、安全運転診断ECU10の機能ブロックをメインに記載している。具体的には、安全運転診断ECU10は、距離判定部11、進入距離判定部12、安全確認判定部13、記憶媒体14、画像生成部15、バッファ16a,16b、スイッチ17a〜17dなどを備える。
【0027】
また、図1に示すように、安全運転診断ECU10は、ナビゲーションシステム20、視線センサ30、車速センサ40(車載センサ群)、アクセルペダル開度センサ50(車載センサ群)、ストップランプスイッチ60(車載センサ群)、ドライブレコーダ70、ディスプレイ80などの外部装置が電気的に接続される。
【0028】
ナビゲーションシステム20は、車両の現在位置(自車位置)を検出する位置検出器、電子地図のデータを記憶している地図データ記憶装置などを備える。位置検出器は、いずれも周知の地磁気センサ、ジャイロスコープ、距離センサ、及び衛星からの電波に基づいて車両の位置を測定するGPS(Global Positioning System)のためのGPS受信機などを採用することができる。
【0029】
また、地図データ記憶装置に記憶された電子地図のデータには、道路を示すリンクデータとノードデータとが含まれる。ここで、リンクとは、地図上の各道路を交差・分岐・合流する点等の複数のノードにて分割したときのノード間を結ぶものであり、各リンクを接続することにより道路が構成される。リンクデータは、リンクを特定する固有番号(リンクID)、リンクの長さを示すリンク長、リンクの始端及び終端ノード座標(緯度・経度)、道路名称、道路種別、道路幅員、車線数、右折・左折専用車線の有無とその専用車線の数、制限速度、および所定距離ごとの道路中心の座標の情報等の各データから構成される。一方、ノードデータは、地図上の各道路が交差、合流、分岐するノード毎に固有の番号を付したノードID、ノード座標、ノード名称、ノードに接続するリンクのリンクIDが記述される接続リンクID、交差点種類、交差点における信号機の有無、交差点の入り口(交差点の進入位置)の座標、交差点の入り口の幅、および交差点の中心座標の情報等の各データから構成される。なお、安全運転診断ECU10は、このナビゲーションシステム20から車両が駐車場に停車しているか否かの情報、直近の交差点における進入位置、直近の交差点における信号機の有無、自車位置など情報を取得する(自車位置取得手段、進入位置取得手段)。
【0030】
視線センサ30は、車両の運転席付近の固定点を原点とする直交座標系でドライバDの視線の水平角を検出し、その水平角(以下、水平角信号とも称する)を出力するものである。視線センサ30は、例えば、自車両CのドライバDの目を含む範囲を撮像する撮像装置(自車両Cに固定して設置されており、撮像方向も固定される)で得られた画像のデータを逐次(例えば100msecごとに)取得する画像取得部、画像取得部から送られてきた画像のデータに基づいて、公知の画像認識技術を用いて画像解析を行い、画像取得部で取得した画像中でのドライバDの黒目の位置を検出する黒目位置検出部、黒目位置検出部から送られてきた黒目の位置の情報に基づいてドライバDの視線の方向を逐次算出する視線方向算出部などを備えるものを採用することができる。なお、虹彩と瞳孔とからなる部分を黒目として用いてもよいし、瞳孔の部分または虹彩の部分を黒目として用いてもよい。また、ここで視線の水平角は、視線のXY平面(水平面)への射影がX軸となす角である。また、X軸は車両の進行方向である。安全運転診断ECU10は、この視線センサ30から水平角(水平角信号)を取得する(水平角取得手段)。
【0031】
車速センサ40は、自車両Cの車軸等に設置され、自車両Cの走行速度を示す検出信号(センサデータ)を出力する。アクセルペダル開度センサ50は、自車両CのドライバDによる、図示しないアクセルペダルの踏込量に応じた検出信号(センサデータ)を出力する。ストップランプスイッチ60は、自車両CのドライバDによって、図示しないブレーキペダルが操作されたときに検出信号(センサデータ)を出力する。
【0032】
ドライブレコーダ70は、例えば、自車両Cのフロントガラスの内側に装着される小型CCDカメラ(車両前方方向撮影用カメラ)、車速センサ40から車速の情報を受信する部材、加速度センサ、メモリカードなどを備える。ドライブレコーダ70は、小型CCDカメラによって車両前方方向の画像(以下、車両前方画像データとも称する)を常時(例えばドライブレコーダ70の起動中)撮像し続けるとともに、それに同期した車速や加速度の情報等の車両の挙動の情報も取得し続ける。
【0033】
ディスプレイ80(表示装置)は、例えば、液晶ディスプレイ、有機ELディスプレイなどを採用することができる。このディスプレイ80は、安全運転診断ECU10(画像生成部15)からの画像データを表示する。
【0034】
安全運転診断ECU10における距離判定部11及び進入距離判定部(進入判定手段)12は、ナビゲーションシステム20から取得した情報(直近の交差点における進入位置、直近の交差点における信号機の有無、自車位置などの情報)に基づいて、視線センサ30から水平角信号を取得してバッファ16aに記憶する区間に、自車両Cが位置するか否かを判定するものである。具体的には、距離判定部11は、ナビゲーションシステム20からの信号に基づいて、自車両Cが直近の交差点の進入位置まで48[m]以内の位置にあるか否かを判定する。一方、進入距離判定部12が、自車両Cが直近交差点の進入位置から2[m]より長く進入したか否かを判定する。
【0035】
安全確認判定部13は、車両が交差点に進入する際に、車両のドライバDによる安全確認がなされたか否かを判定する部分である。この安全確認判定部13は、サンプリング部13a、加工部13b、パワースペクトル計算部13c、周波数抽出部13d、総和計算部13e、比較部13fなどを含む。
【0036】
サンプリング部13aは、進入位置から所定距離より長く進入した時点から過去5[s]間(進入判定直前の過去5秒間)の水平角信号をサンプリングする(サンプリング手段)。この5[s]間は本発明における過去所定時間に相当する。つまり、自車両Cが直近交差点の進入位置から2[m]より長く進入したと判定された直前の5[s]間の水平角信号をサンプリングする。従って、このサンプリング部13aは、過去(交差点の進入位置から所定距離より長く進入した時点以前の5[s]間)に取得してバッファ16aに一時的に記憶しておいた水平角信号をサンプリングする。なお、サンプリング部13aがサンプリングする5[s]間の根拠に関しては後ほど説明する。
【0037】
加工部13bは、自車両Cが直近交差点の進入位置から2[m]より長く進入したと判定された直前の5[s]前(過去所定時間前)の前後における(例えば、長く進入したと判定された時点の6.4[s]前から4.3[s]前の2.1[s]間)にわたる水平角の平均の絶対値が所定値(例えば、17.5[deg])以上である場合に、サンプリング部13aにてサンプリングした水平角信号を加工する。なお、この2.1[s]は、視線の水平角が1周期変化するのに要する時間の下限0.66[s]と上限5.0[s]の平均である2.8[s]の3/4の時間である。また、この3/4の理由を以下に説明する。3/4は、仮にドライバが交差路を通行している他車を視認しておらず左右確認しているなら、視線の水平角は左方向→右方向または右方向→左方向の変化を含む周期である。そして、含むならば、2.1秒の時間内の視線の水平角の平均の絶対値は所定値未満になると考えた。反対に、2.1秒の時間内の視線の水平角の平均の絶対値は所定値以上であれば、左右確認していない、即ち他車を視認していると考えた。
【0038】
このように、サンプリング部13aにてサンプリングした水平角信号を加工するのは、安全確認をしたにもかかわらず安全確認をしていないと誤判定することを低減するためである。
【0039】
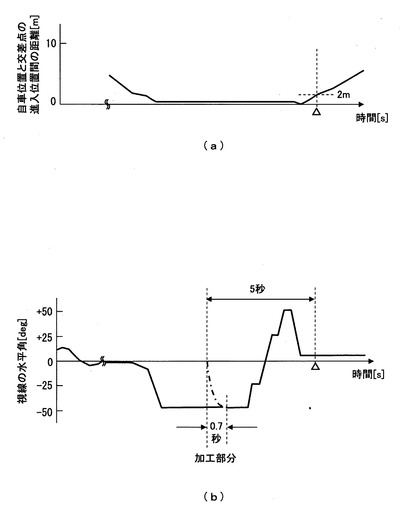
つまり、所定時間内に、ドライバがまず交差路を通行する他車を視認し、他車が通行した後に視線をほとんど移動させることなく他車が接近して来た方向を安全確認し、次に他車が接近して来た方向でない方向(言い換えると他車が遠ざかって行った方向)を確認し、さらに、その次に交差点に進入した場合を考える。ここで、他車は交差路を自車から見て左から右へ又は右から左へ通行するので、例えば、図6(b)に示すように、他車が通行した直後の視線水平角(言い換えると安全確認開始時点の視線の水平角)は、おおよそ0[deg]でなく左方向の所定角または右方向所定角である。なお、図6(a)は、自車位置と交差点の進入位置間の距離[m]と時間[s]との関係を示すグラフであり、図6(b)は、図6(a)に対応する視線の水平角[deg]と時間[s]との関係を示すグラフである。
【0040】
この場合、サンプリングした視線の水平角は、左方向の所定角からはじまり右方向の所定角度以上に変化し、その後におおよそ0[deg]になるか、又は右方向の所定角から左方向の所定角度以上に変化し、その後におおよそ0[deg]になる。したがって、サンプリングした視線の水平角の波形の左端(即ちサンプリング初期)は、おおよそ0[deg]になっていない。したがって、サンプリングした視線の水平角が1周期に満たず、4分の3周期となる。4分の3周期の波形のパワースペクトルを計算すると、安全確認で想定できる所定周波数範囲に所定値以上の極大値を持たないことがある。即ち、ドライバは安全確認したにもかかわらず、安全確認がなされていないと判定する問題が発生することがある。なお、パワースペクトルの計算、安全確認がなされたか否かの判定などに関しては、後ほど説明する。
【0041】
そこで、本実施の形態においては、パワースペクトルを計算する際の水平角は、水平角のサンプリングを開始した時点付近の水平角が所定値以上である場合は1/4周期が付け加えられるように加工する。このように加工すると、安全確認がなされたならば、その時間内に水平角が1周期変化する部分を最低1つ含むようになる。つまり、本発明の特徴は、自車が交差点の進入位置から2[m]より長く進入した時点から5[s]内に安全確認がなされたならば、その時間内に視線水平角が1周期変化する部分を最低1つ含むよう、サンプリングした視線の水平角を加工することである。
【0042】
言い換えると、視線水平角は、0[deg]から始まり左方向の所定角以上に変化し、次に右方向の所定角度以上に変化し、その後におおよそ0[deg]になるか、または0[deg]から始まり右方向の所定角以上に変化し、次に左方向の所定角度以上に変化し、その後におおよそ0[deg]になる。このように加工した水平角のパワースペクトルを計算すると、安全確認で想定できる所定周波数範囲にパワーの極大値を持ち、極大値の和は所定値以上となる。したがって、安全確認がなされたと判定することができる。
【0043】
具体的には、加工部13bは、図6(b)に示すように、自車両Cが直近交差点の進入位置から2[m]より長く進入したと判定(△印)された直前の5[s]前の水平角を0とし、5[s]の0.7[s]後(所定期間後)の水平角がサンプリング部13aにてサンプリングした水平角となるように加工する(加工手段)。換言すると、サンプリング開始時点の水平角は0にし、かつサンプリング開始時点から0.7[s]経過した時点までの視線水平角は、0から0.7[s]経過した時点での実際の視線の水平角に徐々に近づける。
【0044】
つまり、変化中の波形は、初期位相0[deg]、角周波数360/2.8[deg/s]の正弦関数の始めの0秒〜0.7秒の波形をA倍した値とする。ここでAは、交差点に進入した時点の4.3秒前にサンプリングした視線水平角[deg]である。このように加工した後の視線の水平角(水平角信号)は、他車視認に応じた加工後の視線水平角とも称する。これによって、5[s]前から0.7[s]後(0.7秒間)の間における水平角が正弦波の1/4周期となるように加工することになる。
【0045】
なお、後ほど説明するが、視線の水平角が、正面→左方向→右方向→正面または正面→右方向→左方向→正面と変化するのに要する時間は約0.66[s]〜5.0[s]である。上述の0.7[s]は、この変化に要する時間の平均2.8[s]の1/4(周期に相当)に基づくものである。なお、平均2.8を用いる理由は、確認時間は0.66[s]〜5.0[s]内であるものの、より正確な時間は分からないからである。また、1/4を用いる理由は、0.7秒間の加工部分は、正面→左方向→右方向→正面のうちの正面→左方向の部分、または正面→右方向→左方向→正面のうちの正面→右方向の部分であるから、つまり視線水平角の1周期変化のはじめの1/4周期部分だからである。
【0046】
なお、加工部13bは、自車両Cが直近交差点の進入位置から2[m]より長く進入したと判定された直前の5[s]前の前後における水平角の平均の絶対値が所定値以上でない場合は、加工を行わない。従って、サンプリング部13aでサンプリングされた水平角信号は、そのままパワースペクトル計算部13cに出力される。
【0047】
パワースペクトル計算部(パワースペクトル計算手段)13cは、視線センサ30から取得した水平角信号(加工有り又は加工無し)のパワースペクトルを計算するものである。つまり、加工部13bで加工された水平角又は、加工部13bでの加工がなされてない水平角(サンプリング部13aから出力された水平角)のパワースペクトルを計算するものである。例えば、視線センサ30から取得した水平角信号をフーリエ変換し、そのフーリエ変換した結果に対して、各周波数の大きさ成分を二乗してパワースペクトルを算出する。
【0048】
周波数抽出部13dは、パワースペクトル計算部13cの計算結果より、水平角の変化の周波数0.2〜1.5[Hz]間でパワーが極大となる周波数を抽出する。そして、総和計算部13eは、周波数抽出部13dにて抽出した周波数でのパワーの極大値の総和を計算する。そして、比較部13fは、総和計算部13eにて計算した総和と判定値(ここでは、12000)と比較する。なお、水平角の変化の周波数(確認周波数)、パワーが極大となる周波数、判定値に関しては後ほど説明する。
【0049】
記憶媒体(データ記憶媒体)14は、視線の水平角と同時に取得した車両前方画像データ、及びセンサデータを記憶するものである。特に、本実施の形態においては、水平角信号、車両前方画像データ、及びセンサデータをバッファ16a及び16bに一時記的に記憶しておき(一時記憶手段)、安全確認判定部13にて安全確認がなされていないと判定された場合に水平角信号、車両前方画像データ、及びセンサデータが記憶媒体14に記憶される。
【0050】
画像生成部15は、水平角信号、車両前方画像データ、及びセンサデータからディスプレイ80で表示可能な画像を生成するものである。
【0051】
バッファ16a,16bは、水平角信号、車両前方画像データ、及びセンサデータなどを一時的に記憶するものである(一時記憶手段)。具体的には、バッファ16aは、視線センサ30から取得した水平角信号を一時的に記憶する(一時記憶手段)。一方、バッファ16bは、車速センサ40、アクセルペダル開度センサ50、ストップランプスイッチ60から取得したセンサデータ、及びドライブレコーダ70から取得した車両前方画像データを一時的に記憶する(一時記憶手段)。
【0052】
スイッチ17aは、距離判定部11が直近交差点の進入位置から48[m]以内に自車両Cがあると判定した場合にオンし、それ以外の場合はオフする。また、スイッチ17bは、進入距離判定部12が自車両Cが直近交差点の進入位置から2[m]進入したと判定した場合にオンし、所定のタイミング(例えば、自車両Cが直近交差点の進入位置から12[m]以内に達したときなど)でオフする。これは、車両が確認区間に位置する場合に水平角信号などを取得するためである。
【0053】
スイッチ17cは、比較部13fがパワーの総和が判定値を下回ったと判定した場合にオンし、それ以外の場合はオフする。これは、パワーの総和が判定値を下回った場合に、バッファ16a,16bに一時的に記憶された水平角信号、車両前方画像データ、及びセンサデータを記憶媒体14に記憶させるためである。
【0054】
スイッチ17dは、ナビゲーションシステム20から自車両Cが駐車場(例えば、自宅や職場の駐車場)に停車したことを示す信号(例えば「1」)を取得するとオンし、それ以外の場合(例えば「0」)はオフする。これは、自車両Cが駐車場(例えば、自宅や職場の駐車場)に停車した場合に、車両前方画像データ、及びセンサデータからディスプレイ80で表示可能な画像を生成して、ディスプレイ80に表示するためである。
【0055】
このような構成を備える本実施の形態における安全運転診断ECU10は、信号の無い交差点において安全確認していないにもかかわらず安全確認したという誤判定の頻度を減らすこと、及び安全確認をしたにもかかわらず安全確認をしていないと誤判定することを低減することを目的とするものである。
【0056】
安全確認には、確認幅が十分であること(言い換えれば、視線の水平角の幅が所定値以上であることと)、確認時間が適切であること(言い換えれば、確認時間が短すぎずかつ長過ぎないこと)の少なくとも2つが必要である。また、確認幅と確認時間の2つは、確認幅と確認速度に、さらに確認幅と確認周波数の2つに言い換えることができる。また、本実施の形態における安全運転診断ECU10のより具体的な目的は、視線の水平角から確認幅と確認周波数という2つの必要条件の成立を検証できる判定法を定めることである。
【0057】
なお、安全確認は、自車両Cが他車と衝突することを回避するための行動である。言い換えると、安全確認は、自車両Cがこれから交差点に進入するに際して、交差点を含む左右方向それぞれの所定範囲に他車が存在しないことを確認する行動である。
【0058】
ここで、図2を用いて、その所定範囲に関して説明する。所定範囲は、仮にその範囲に現在他車が存在しかつ自車両Cが交差点に進入した場合に、交差点内で自車両Cが他車に接近する可能性がある範囲である。つまり、自車両Cの位置は車両前端の位置とし、交差点の進入位置は交差点手前の2つの端点を結ぶ線分とした場合、所定範囲は、交差点の中心から交差路の左右方向へ所定距離内である。
【0059】
交差点の左端及び右端からそれぞれ交差路上左方向、交差路上右方向それぞれの所定距離A[m]とする。すると、A[m]は、その交差路において他車の速度V0[m/s]に安全確認に要する時間Tv[s]と、安全確認後に交差点に進入するまでの時間Te[s]と自車両Cが交差点内を通行する時間Ti[s]の3つの時間の和(Tv[s]+Te[s]+Ti[s])を乗じた値が適切である。
【0060】
本実施の形態における安全運転診断ECU10は、所定距離Aの最小値を定め、視線が向いた範囲がその距離から定まる所定範囲以下とみなした場合に、安全確認でなかったと判定する。逆に、視線が向いた範囲が所定範囲以上とみなした場合に、安全確認と判定する。
【0061】
ここで所定距離Aの最小値A*を式で表現すると、A*=min(V0)×{min(Tv)+min(Te)+min(Ti)}[m]となる。そこで、所定距離Aの最小値A*を定めるために、各V0、Tv、Te、Tiの最小値を説明する。
【0062】
交差路を通行する他車の速度V0は、交差路の幅が狭いほど小さいと考える。例えば、交差路の幅の最小値は、約5[m]と定め、V0の最小値を20[km/h]とする。
【0063】
次に、安全確認に要する時間Tv[s]は、交差路の視認のしやすさ、ドライバDの視力等に応じて変化するが、最小値は約0.7[s]とする。
【0064】
安全確認後に交差点に進入するまでの時間Te[s]は、安全確認後に所定時間以上走行後交差点に進入する場合と、安全確認後速やかに交差点に進入する場合があるが、通常、安全確認後速やかに交差点に進入する場合の方が短い。そこで、Te[s]の最小値は安全確認後速やかに交差点に進入する場合を想定して約0.5[s]とする。
【0065】
また、自車両Cが交差点内を通行する時間Ti[s]は、交差点の大きさが小さいほど、また自車両C速度が大きいほど、小さいと考える。交差点の大きさの最小値は約5[m]四方、かつ自車両C速度の最大値は30[km/h]、かつ車両の全長は5[m]と定める。このように定めると、Ti[s]の最小値は1.2[s]である。
【0066】
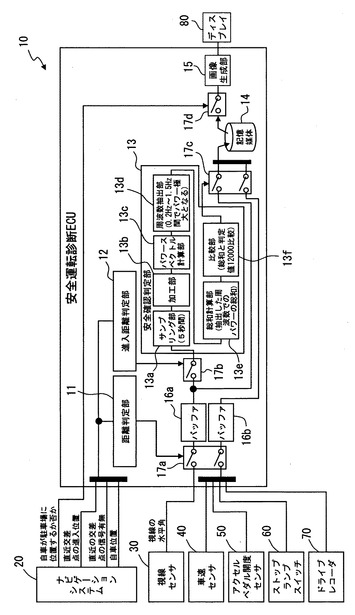
以上をまとめると、V0の最小値は20[km/h]、Tvの最小値は0.7[s]、Teの最小値は0.5[s]、Tiの最小値は1.2[s]である。したがって、交差点の左端及び右端からそれぞれ交差路上左方向・交差路上右方向の所定距離Aの最小値A*は13.3[m]である。よって、確認すべき最小範囲は、交差点の左端から交差路上左方向へ13.3[m]の位置から交差点を内含み交差点の右端から交差路上右方向へ13.3[m]の位置までである。なお、図2は、交差点を上から見た図において確認すべき最小範囲を含む図である。
【0067】
次に、図2を用いて、最小範囲を確認するために必要な視線の水平角の角度幅に関して説明する。角度幅は、視覚には視野があることを前提として求める。言い換えれば、視線の周囲のある角度幅は、確認可能であることを前提として求める。その結果、最小範囲を確認するために必要な視線の水平角の角度幅は、まず自車両C内のドライバD位置から最小範囲の左右端それぞれの方向への角度を求め、次にそれらの角度から視野分を差し引くことより求められる。
【0068】
自車両C内のドライバDの目の位置から最小範囲の左右端それぞれの方向への角度は、自車両C位置と交差点の間の距離により変化する。より具体的には、その距離が長いほど角度の絶対値は小さい。そこで、本実施の形態においては、最小範囲の左右端に対応する角度は、自車両Cが交差点の進入位置から最も遠い位置にある時の角度、すなわち絶対値が最も小さい角度とする。
【0069】
そこで、次に、最小範囲の左右端それぞれの方向への角度を定めるための交差路の進入位置から最も遠い自車両C位置を規定する。この位置は、安全確認が終了する位置のうち交差路の進入位置から最も遠い位置とする。交差路の進入位置から最も遠い自車両C位置までの距離L*を式で表現すると、L*=max(V)×Te[m]となる。ここでV[m/s]は自車両Cの速度である。L*は、交差路上左方向、交差路上右方向それぞれの所定距離A[m]を求めた時の仮定と整合させるために、安全確認後に自車両Cが交差点に進入するまでの時間Te[s]が最小値0.5[s]である条件のうちから定める。
【0070】
この条件の下でさらに、自車両Cの想定し得る最大速度を30[km/h]と仮定すると、交差点の進入位置から4.2mが最も遠い位置となる。そうすると、自車両Cが交差点の進入位置から最も遠い位置にある場合のドライバDの目の位置から確認すべき最小範囲の左右端それぞれの方向への角度は約−61[deg]、+61[deg]となる。
【0071】
ここで、ドライバDの右の直交方向を+90[deg]、ドライバDの左の直交方向を−90[deg]、ドライバDの正面方向を0[deg]とする。また、自車両C位置すなわち車両前端からドライバDの目の位置までの距離は2mとする。次に、水平方向の視野は35[deg]である、言い換えると視線の水平角の周囲±17.5[deg]は確認可能であると仮定すると、最小範囲を確認するために必要な視線の水平角の角度幅は±43.5[deg]である。なお図2は、交差点を上から見た図において必要な視線の水平角の角度幅を含む図である。ちなみに最小範囲を確認するために必要な視線の水平角の角度幅は、θ*=atan{(A*+W/2)/(L*+W/2+E)}−φ/2[deg]とおくと、±θ*[deg]と表される。ここでW[m]は交差点の1辺の長さ、E[m]は車両前端からドライバDの目の位置までの距離、φ[deg]は水平方向の視野である。
【0072】
次に、本実施の形態の安全運転診断ECU10における安全確認を行う必要条件に関して説明する。これは、安全確認とみなす時間に関する必要条件である。具体的には、安全確認は、自車両Cが交差点の進入位置から所定距離より長く進入した時点以前の5[s]間(本発明における過去所定時間に相当する)の行動とする条件である。つまり、サンプリングする範囲は、自車両Cが交差点の進入位置から所定距離より長く進入した時点直前の5[s]間である。
【0073】
自車両Cが交差点の進入位置から所定距離より長く進入した時点を時間の最終時点とする理由は、ドライバDが視界を遮られることのない地点に到達した時点を時間の最終時点としたいからである。
【0074】
また、5[s]としたのは、以下の理由によるものである。まず、ドライバの左右確認時の視線の水平角の変化周波数は、後述するように人間工学上0.2Hzから1.5Hzの間であり、この周波数範囲のパワーにより左右確認を判定する。このように範囲を規定しているので、この2つの端の周波数のパワーは計算したい。また、一定周期でサンプリングした視線の水平角からパワーを計算する場合、パワーが計算される周波数は離散値である。したがって、サンプリング周期やサンプリング時間によって0.2Hzでパワーを計算できても1.5Hzで計算できないことが起こり得る。さらに、実際の左右確認では視線水平角の周波数は、たいてい0.2Hzから0.6Hzの間であり、1.5Hz以上になることはまれである。したがって、0.2Hz付近のパワーは、1.5Hz付近のパワーに比べて大きい。そこで、2つの端のうち0.2Hzの方のパワーを確実に計算するためである。
【0075】
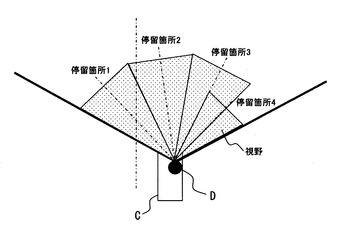
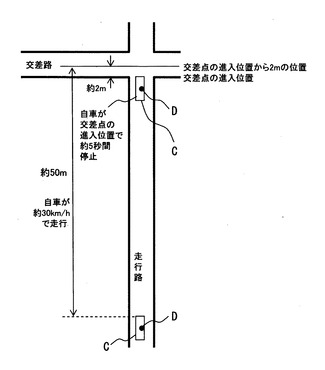
ちなみに、自車両Cが直近交差点の進入位置から所定距離より長く進入した時点以前の5秒間に自車両Cが位置する範囲は、自車両Cが想定し得る最高速度で走行し続けた場合に最大となり、自車両Cが交差点の進入位置近くで停止した場合に最小となる。自車両Cが想定しうる最高速度を約30[km/h]とすると、自車両Cが位置する範囲は約50[m]となる(図4参照)。また、自車両Cが交差点の進入位置で約5[s]間停止した後発進し、発進後約1[s]で交差点の進入位置から所定距離に位置したとすると、6[s]間に自車両Cが位置する範囲は所定距離に等しい2[m]である。
【0076】
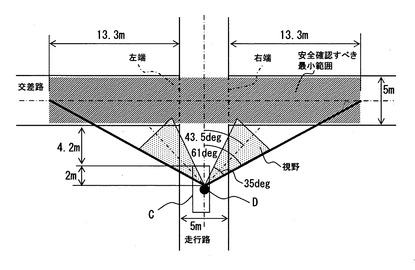
次に、安全確認中の視線の水平角の変化速度に関して説明する。本実施の形態における安全運転診断ECU10では、人間工学の教科書である横溝他著「エンジニアのための人間工学(日本出版サービス社)」の84〜85ページに記された数値を採用し、人間が1箇所を認知する時間は、145[ms]〜1070[ms]であるとする。ここで、認知する時間は、眼球運動、対象への停留、焦点合わせ、特性取り込み、感覚記憶、認知の各時間の和である。また、本実施の形態においては、上述のように、安全確認すべき最小範囲の左右端それぞれの方向への角度は約−61[deg]、+61[deg]とする。また水平方向の視野は35[deg]と仮定する。また、安全確認開始時及び安全確認終了時の視線の水平角はドライバDの正面方向、言い換えれば水平角は0[deg]とする。
【0077】
これらの仮定の下では、安全確認すべき最小範囲を認知するためには、視線の水平角の停留箇所は、図3に示す停留箇所1〜停留箇所4の最低4箇所必要である。また、4箇所を認知する時間は1箇所を認知する時間の4倍の580[ms]〜4280[ms]となる。4箇所を認知した時間にさらに眼球を正面に戻す時間である70[ms]〜700[ms]を加えると、安全確認すべき最小範囲の4箇所を認知する時間は650[ms]〜4980[ms]となる。
【0078】
つまり、視線の水平角が、正面→左方向→右方向→正面または正面→右方向→左方向→正面と変化するのに要する時間は650[ms]〜4980[ms]である。この変化は1周期の変化であるので、1周期の変化に要する時間は650[ms]〜4980[ms]である。言い換えると、安全確認のため4箇所を認知する時の視線の水平角の変化の周波数は0.2[Hz]〜1.5[Hz]である。
【0079】
以上のことより、確認幅が視線の水平角の角度幅として±43.5[deg]以上であること、また確認時間(確認周波数)に対応する条件として視線水平角の変化の周波数は0.2[Hz]〜1.5[Hz]であることは、それぞれ安全確認の必要条件である。つまり、安全確認に必要な水平角の変化の周波数範囲は、0.2[Hz]〜1.5[Hz]である。
【0080】
本実施の形態における安全運転診断ECU10は、上述の視線の水平角の角度幅と水平角の変化の周波数(確認周波数)に着目し、視線の水平角のパワースペクトルにより安全確認を判定するものである。一般に、ある時間区間でサンプリングした信号において、所定周波数の振幅の大小は、信号のパワースペクトルの所定周波数でのパワーの大小に表れる。また、所定周波数の繰り返し数の大小もパワーの大小に表れる。逆に、パワースペクトルにおいて、所定周波数のパワー値が大きいほど、信号の所定周波数の振幅が大きいか、または信号の所定周波数での繰り返し数が多い。
【0081】
したがって、安全確認時の視線水平角の絶対値が0[deg]から90[deg]に近づけば近づくほど0.2[Hz]〜1.5[Hz]の範囲のパワーは大きくなる。また、安全確認の回数が増えれば増えるほど0.2[Hz]〜1.5[Hz]の範囲のパワーは大きくなる。
【0082】
そこで、本実施の形態における安全運転診断ECU10は、自車両Cが交差点の進入位置から所定距離より長く進入した時点以前の5[s]間(本発明における過去所定時間に相当する)の水平角をサンプリングする。そして、視線の水平角の0.2[Hz]〜1.5[Hz]間のパワーの極大値の和が所定値以上であるならば、視線水平角の絶対値が安全上十分または安全確認回数が安全上十分とみなし、ドライバによる安全確認がなされたと判定する。反対にそうでない場合は、ドライバによる安全確認がなされなかった判定する。なお、本実施の形態においては、判定値は約12000とする。
【0083】
この判定値(12000)は、安全確認したにもかかわらず安全確認でないと誤判定する可能性を低くするよう、必要最低限の安全確認における0.2Hz〜1.5Hz間のパワーの極大値の和とした。具体的には、角度幅±約43.5[deg]、周波数約0.6Hzすなわち周期約1.7[s]で1周期分の視線水平角の変化を、必要最低限の安全確認と仮定する。ここで、角度幅±約43.5[deg]は交差路を通行する他車を視野に収めるために必要な角度である。また、周期約1.7[s]はドライバの実際の安全確認で想定した最短の視線水平角の変化周期である。
【0084】
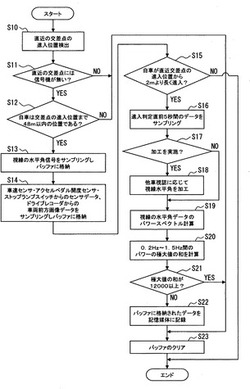
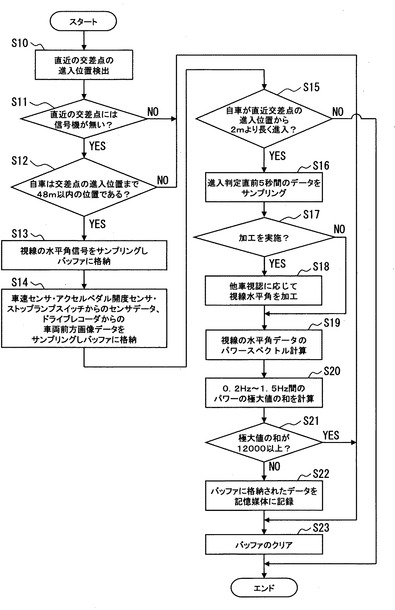
ここで、図5に基づいて、本実施の形態における安全運転診断ECU10の安全確認判定処理動作に関して説明する。なお、図5のフローチャートに示す処理動作は、例えば、安全運転診断ECU10に電源供給がなされた場合などにスタートして、所定時間毎に繰り返し実行するものである。
【0085】
ステップS10では、安全運転診断ECU10は、ナビゲーションシステム20からの信号に基づいて、直近の交差点の進入位置(交差点入口)を検出する。ステップS11では、安全運転診断ECU10は、ナビゲーションシステム20からの信号に基づいて、直近の交差点に信号機がないか否かを判定する。そして、信号機がないと判定した場合はステップS12へ進み、信号機があると判定した場合はドライバによる安全確認が行われたか否かを判定する必要ながいとみなしてステップS23へ進む。
【0086】
ステップS12では、距離判定部11は、ナビゲーションシステム20からの信号に基づいて、自車両Cが直近の交差点の進入位置まで48[m]以内の位置にあるか否かを判定する。そして、48[m]以内の位置にあると判定した場合はステップS13へ進み、48[m]以内の位置にないと判定した場合はステップS23へ進む。これは、上述のように、ドライバが安全確認動作を行うべき範囲とみなす時間(期間)であるか否か、つまり、視線の水平角信号の取得を開始するか否かを判定するためである。
【0087】
ステップS13では、距離判定部11は、視線センサ30から出力された水平角信号を取得してバッファ16aに一時的に記憶する。具体的には、距離判定部11は、自車両Cが直近の交差点の進入位置から48[m]の範囲にある場合にスイッチ17aをオンすることによって、視線センサ30から出力された水平角信号を取得してバッファ16aに一時的に記憶する。
【0088】
ステップS14では、距離判定部11は、スイッチ17aをオンすることによって、水平角信号と同時に、車速センサ40、アクセルペダル開度センサ50、ストップランプスイッチ60(車載センサ群)から出力されたセンサデータをサンプリング(取得、センサデータサンプリング手段)すると共に、ドライブレコーダ70から出力された車両前方画像データをサンプリング(取得、画像データサンプリング手段)してバッファ16bに記憶する。
【0089】
ステップS15では、進入距離判定部12は、ナビゲーションシステム20からの信号に基づいて、自車両Cが直近の交差点の進入位置から2[m]より長く進入(所定距離以上進入)したか否かを判定する(進入判定手段)。そして、2[m]より長く進入したと判定した場合はステップS16へ進み、2[m]より長く進入していないと判定した場合は処理を終了する。なお、進入距離判定部12は、自車両Cが直近交差点の進入位置から2[m]進入したと判定した場合にスイッチ17bをオンする。
【0090】
そして、進入距離判定部12が、自車両Cが直近交差点の進入位置から2[m]より長く進入したと判定した場合(ステップS15でYES)、ステップS16において、サンプリング部13aは、進入判定直前の5[s]間の水平角信号をサンプリングする。つまり、自車両Cが直近交差点の進入位置から2[m]より長く進入したと判定された直前の5[s]間の水平角信号をサンプリングする。従って、このサンプリング部13aは、過去(交差点の進入位置から所定距離より長く進入した時点以前の5[s]間)に取得してバッファ16aに一時的に記憶しておいた水平角信号をサンプリングする。
【0091】
ステップS17では、加工部13bは、水平角信号の加工を実施するか否かの判定をして、加工を実施すると判定した場合はステップS18へ進み、加工を実施しないと判定した場合はステップS19へ進む。このとき、加工部13bは、バッファ16aに一時的に記憶しておいた水平角信号を用いて自車両Cが直近交差点の進入位置から2[m]より長く進入したと判定された直前の5[s]前の前後における水平角の平均の絶対値を算出する。そして、その絶対値の値が所定値(例えば、17.5[deg])以上である場合は安全確認開始時点ではユーザーが正面を向いてないとみなして加工すると判定し、所定値以上でない場合は安全確認開始時点ではユーザーが正面を向いているとみなして加工しないと判定する。
【0092】
そして、ステップS18では、加工部13bは、サンプリング部13aにてサンプリングした水平角信号を加工する。具体的には、加工部13bは、図6(b)に示すように、自車両Cが直近交差点の進入位置から2[m]より長く進入したと判定された直前の5[s]前の水平角を0とし、5[s]の0.7[s]後の水平角がサンプリング部13aにてサンプリングされた水平角となるように加工する(加工手段)。換言すると、サンプリング開始時点の水平角は0にし、かつサンプリング開始時点から0.7[s]経過した時点までの視線水平角は、0から0.7[s]経過した時点での実際の視線の水平角に徐々に近づける。図6(b)中の一点鎖線の部分が加工した部分(水平角)である、
つまり、波形は、初期位相0[deg]、角周波数360/2.8[deg/s]の正弦関数の始めの0秒〜0.7秒の波形をA倍した値とする。ここでAは、交差点に進入した時点の4.3秒前にサンプリングした視線水平角[deg]である。このように加工した後の視線の水平角(水平角信号)は、他車視認に応じた加工後の視線水平角とも称する。これによって、5[s]前から0.7[s]後の間における水平角が正弦波の1/4周期となるように加工することになる。このようにすることによって、安全確認がなされていれば、その時間内に水平角が1周期変化する部分を最低1つ含むようになる。
【0093】
ステップS19では、パワースペクトル計算部13cは、加工部13bで加工された水平角又は、加工部13bでの加工がなされてない水平角(サンプリング部13aから出力された水平角)のパワースペクトルを計算する(パワースペクトル計算手段)。例えば、視線センサ30から取得した水平角信号をフーリエ変換し、そのフーリエ変換した結果に対して、各周波数の大きさ成分を二乗してパワースペクトルを算出する。
【0094】
ステップS20では、周波数抽出部13dは、パワースペクトル計算部13cの計算結果より、水平角の変化の周波数0.2[Hz]〜1.5[Hz]間でパワーが極大となる周波数を抽出する。そして、総和計算部13eは、周波数抽出部13dにて抽出した周波数でのパワーの極大値の総和を計算する。
【0095】
ステップS21では、比較部13fは、総和計算部13eにて計算した総和(極大値の和)と判定値(ここでは、12000)と比較して、極大値の和が12000以上であるか否かを判定する(安全確認判定手段)。そして、極大値の和が12000以上であると判定した場合はドライバによる安全確認がなされたとみなしてステップS23へ進み、極大値の和が12000以上でないと判定した場合はドライバによる安全確認がなされていないとみなしてステップS22へ進む。
【0096】
なお、図7(a)は、交差路に他車の通行無し(つまり、他車の視認なし)でドライバによる安全確認がなされた時の自車位置と交差点の進入位置間の距離[m]と時間[s]との関係を示すグラフである。図7(b)は、図7(a)に対応する視線の水平角[deg]と時間[s]との関係を示すグラフである(加工なし)。図8(a)は、図7(b)を部分的に拡大したグラフである。図8(b)は、このときのパワースペクトルと周波数[Hz]の関係を示すグラフである。なお、このとき、自車が直近交差点の進入位置から2mより長く進入した時点の6.4[s]前から4.3[s]前の2.1[s]間の視線の水平角の平均値は±15.9[deg]である。この場合、0.2[Hz]〜1.5[Hz]間のパワーの極大値の和は100430である。よって、この例からも極大値の和が12000以上であると判定した場合はドライバによる安全確認がなされたとみなすことができる。
【0097】
このように、安全確認に必要な水平角の変化の周波数範囲におけるパワーの極大値の和が所定値以上である場合、安全確認のための必要条件である確認時間(確認周波数)と確認幅を満たしたとみなすことができる。つまり、確認幅と確認時間(確認周波数)が必要条件を満たした場合に、ドライバDによる安全確認がなされたと判定する。よって本実施の形態の安全運転診断ECU10は、安全確認がなされたか否かの判定の信頼度が高く、交差点において安全確認をしていないにもかかわらず、安全確認をしたと誤判定することを低減することができる。
【0098】
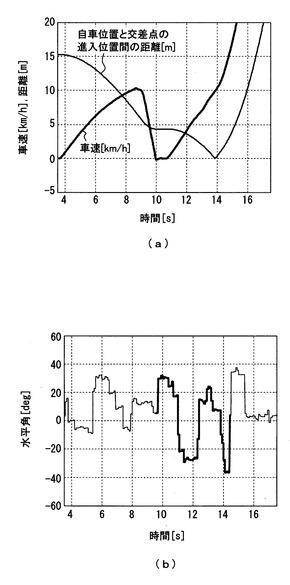
次に、図9(a)は、交差路に他車の通行有りかつその他車の視認有りの場合であり、ドライバによる安全確認がなされた時の自車位置と交差点の進入位置間の距離[m]と時間[s]との関係を示すグラフである。図9(b)は、図9(a)に対応する視線の水平角[deg]と時間[s]との関係を示すものであり、水平角の加工なしの場合のグラフである。図10(a)は、図9(b)を部分的に拡大したグラフである。図10(b)は、このときのパワースペクトルと周波数[Hz]の関係を示すグラフである。なお、このとき、自車が直近交差点の進入位置から2mより長く進入した時点の6.4[s]前から4.3[s]前の2.1[s]間の視線の水平角の平均値は±51.5[deg]である。この場合、0.2[Hz]〜1.5[Hz]間のパワーの極大値の和は7109である。この例からもわかるように、ドライバがまず交差路を通行する他車を視認した場合、ドライバは安全確認したにもかかわらず、安全確認がなされていないと判定されてしまう。
【0099】
次に、図11は、図9(a)に対応する視線の水平角[deg]と時間[s]との関係を示すものであり、水平角の加工ありの場合のグラフである。図12(a)は、図11を部分的に拡大したグラフである。つまり、図9(b)における水平角を上述のように加工したものである。図11中の囲った部分が加工した部分である。図12(b)は、このときのパワースペクトルと周波数[Hz]の関係を示すグラフである。この場合、0.2[Hz]〜1.5[Hz]間のパワーの極大値の和は144630である。
【0100】
このように安全確認を行っていた場合は、加工した視線の水平角のパワースペクトルを計算すると、安全確認で想定できる所定周波数範囲にパワーの極大値を持ち、極大値の和は所定値以上となる。したがって、安全確認がなされたと判定することができる。なお、反対に、安全確認で想定できる所定周波数範囲にパワーの極大値を持たないか、極大値を持っても所定値未満の場合は、安全確認がなされていないと判定する。安全確認がなされていないと判定された場合の加工した視線水平角は、左方向の視線水平角は所定値以上であるが右方向の視線水平角が所定角未満である、または右方向の視線水平角は所定値以上であるが左方向の視線水平角が所定角未満である等ある。
【0101】
従って、上述のように視線の水平角を加工することによって、ドライバがまず交差路を通行する他車を視認した場合、ドライバは安全確認したにもかかわらず、安全確認がなされていないと誤判定することを低減できることがわかる。
【0102】
ステップS22では、比較部13fは、スイッチ17cをオンすることによって、バッファ16a、16bに格納(一時的に記憶)されたデータ(水平角信号、センサデータ、車両前方画像データ)を記憶媒体14に記憶する(データ記憶手段)。そして、ステップS23では、バッファ16a、16bに格納(一時的に記憶)されたデータ(水平角信号、センサデータ、車両前方画像データ)を記憶媒体14に記憶すると、バッファ16a、16bをクリアする。
【0103】
このように、安全確認がなされていないと判定された場合に、水平角信号、センサデータ、車両前方画像データを記憶媒体14に記憶するのは、信号の無い交差点で安全確認がなされたとはいえない実際の視線挙動を、それが発生した交通環境・車両挙動・操作の情報とともにドライバDに提供するためである。また、信号の無い交差点で安全確認がなされたとはいえない視線挙動は、間違った思い込みまたは運転のくせがあるとみなすことができる。よって、換言すると、ドライバDの間違った思い込みや、ドライバDの運転のくせを直すための情報を、ドライバDに提供するためである。また、水平角信号、センサデータ、車両前方画像データを記憶媒体14に記憶することで、ドライバDの間違った思い込みやドライバの運転のくせを直すための情報を、ドライバDに提供することが可能となるので好ましい。
【0104】
つまり、本実施の形態における安全運転診断ECU10は、このように安全確認がなされたとはいえない実際の視線挙動を、それが発生した交通環境・車両挙動・操作の情報とともにドライバDに提供することによって、思い込みや運転のくせを直すことを目的の一つとするものである。
【0105】
この提供する情報は、極力実際の運転を再現したものが好ましい。また、実際の運転は、時間経過に伴う走行環境変化と変化に対応した操作の繰り返しとみなせる。そこで、具体的には、自車両Cが確認区間を走行している際の、車両前方画像(車両前方画像データによって表示される画像)に、水平角信号及びセンサデータを重畳させた画像を提供する。
【0106】
つまり、本実施の形態における安全運転診断ECU10は、運転診断画像の表示処理を実行する。まず、安全運転診断ECU10は、ナビゲーションシステム20からの信号に基づいて、自車両Cが自宅の駐車場や職場の駐車場等に位置(停車)するか否かを判定する(停車判定手段)。
【0107】
次に、自車両Cが自宅の駐車場や職場の駐車場等に位置(停車)すると判定した場合は、安全運転診断ECU10は、スイッチ17dをオンして記憶媒体14に記憶された運転診断画像を表示するためのデータ(車両前方画像データ、水平角信号及びセンサデータ)を画像生成部15に出力する。なお、位置(停車)していないと判定した場合は、この判定を繰り返す。なお、自宅の駐車場や職場の駐車場以外の駐車場に自車両Cを停車した時を採用してもよい。
【0108】
画像生成部15は、水平角信号、車両前方画像データ、及びセンサデータからディスプレイ80で表示可能な運転診断画像を生成して、生成した運転診断画像をディスプレイ80に表示する(表示手段)。この運転診断画像は、例えば、記憶媒体14に記憶された車両前方画像データが示す車両前方画像に、記憶媒体14に記憶された水平角信号及びセンサデータを重畳させた画像などを採用することができる。
【0109】
このように、車両前方画像に、水平角信号及びセンサデータを重畳させた画像(運転診断画像)をディスプレイ80に表示することによって、実際の運転に近い状況を再現することができるので好ましい。また、自宅の駐車場や職場の駐車場で自車両Cを停止させた時は、ドライバDは特に心理的に余裕があることが多い。よって、上述のように、自車両Cが自宅の駐車場や職場の駐車場等に位置(停車)しているときに、運転診断画像を提供することによって、心理的に余裕があるドライバに対して運転診断画像を提供することができるので好ましい。このように安全確認がなされてないと判定した時と、運転診断画像を提供する時は異なる。
【0110】
なお、自車両Cが自宅の駐車場や職場の駐車場等に位置(停車)すると判定してからスイッチ17dをオンする間に、安全運転診断ECU10は、記憶媒体14に運転診断画像を表示するためのデータ(車両前方画像データ、水平角信号及びセンサデータ)が存在するか(記憶されているか)否かを判定するようにしてもよい。そして、存在すると判定した場合にスイッチ17dをオンする。
【0111】
また、自車両Cが自宅の駐車場や職場の駐車場等に位置(停車)すると判定してからスイッチ17dをオンする間に、安全運転診断ECU10は、ドライバDに運転診断される意思があるか否かを判定するようにしてもよい。つまり、安全運転診断ECU10は、図示しないリモコンやタッチパネルなど指示装置からの信号に基づいて、運転診断画像の表示指示がなされたか否かを判定する(指示判定手段)。そして、指示装置からの表示指示を示す信号が入力された場合は運転診断される意思があるとみなして、スイッチ17dをオンする。なお、指示装置(図示省略)からの表示指示を示す信号が入力されない場合は運転診断される意思がないとみなして、自車両Cが停車したか否かの判定に戻る。
【0112】
しかしながら、運転診断画像を提供するのは自車両Cが自宅の駐車場や職場の駐車場等に位置(停車)している場合に限定されるものではない。安全運転診断ECU10(画像生成部15)は、自車両Cが自宅の駐車場や職場の駐車場等に位置(停車)していなくても、指示装置からの表示指示を示す信号が入力された場合に運転診断画像を生成して、生成した運転診断画像をディスプレイ80に表示する(表示手段)ようにしてもよい。
【0113】
また、本実施の形態においては、ドライバDに提供する情報として、車両前方画像に、水平角信号及びセンサデータを重畳させた画像(運転診断画像)を採用したが本発明はこれに限定されるものではない。例えば、より簡易な形態として、交差点通過時に安全確認でなかったことを知らせる音声メッセージを採用することもできる。ドライバDに提供する情報として、音声メッセージを採用した場合、画像を視認させることに比べて心理的負荷を低減することができる。したがって、音声メッセージは、運転中に提供してもドライバDに対する悪影響は少ない。つまり、音声メッセージの提供時期は、例えば、安全確認でないと判定した直後や、安全確認でないと判定した次に信号の無い交差点の数十[m]前の地点に位置したとき等を採用することができる。
【0114】
上述のように、本実施の形態の安全運転診断ECU10は、安全確認がなされたか否かの判定の信頼度が高い。よって、このように運転診断画像をディスプレイ80に表示することによって、ドライバDは、信頼度の高い診断結果(運転診断画像)を得ることができるので好ましい。
【符号の説明】
【0115】
10 安全運転診断ECU(安全運転診断装置)、11 距離判定部、12 進入距離判定部、13 安全確認判定部、13a サンプリング部、13b 加工部、13c パワースペクトル計算部、13d 周波数抽出部、13e 総和計算部、13f 比較部、14 記憶媒体、15 画像生成部、16a,16b バッファ、17a〜17d スイッチ、20 ナビゲーションシステム、30 視線センサ、40 車速センサ、50 アクセルペダル開度センサ、60 ストップランプスイッチ、70 ドライブレコーダ、80 ディスプレイ
【技術分野】
【0001】
本発明は、安全運転診断装置に関するものである。
【背景技術】
【0002】
従来、交差点を通過する際におけるドライバの安全確認の有無を判定する技術の一例として、特許文献1に示される車両用情報報知装置があった。
【0003】
特許文献1に示される車両用情報報知装置は、交差点の幾何学的形態に応じて左方向、右方向それぞれに基準角度を定め、顔向きまたは視線が基準角度を超えたか否か、または顔向きまたは視線が基準角度を超えた積算時間が所定時間を越えたか否かにより、安全確認を判定するものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−227905号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に示される車両用情報報知装置においては、顔向きまたは視線が基準角度を超えたか否かによって安全確認を判定する場合、安全確認時間が短すぎると、安全確認していないにもかかわらず安全確認したと誤判定する可能性がある。例えば、視線(又は顔向き)が約0.1秒間左方向の所定角を越え、続いて約0.1秒間右方向の所定角を越えた後に交差点に進入した場合を考える。この場合、特許文献1に示される車両用情報報知装置では安全確認したと判定する。しかしながら、約0.1秒という短時間では安全確認できないことがある。よって、安全確認ができていないにもかかわらず確認したと誤判定する可能性がある。
【0006】
また、顔向きまたは視線が基準角度を超えた積算時間が所定時間を越えたか否かによって安全確認を判定する場合、安全確認時間が長すぎると、安全確認していないにもかかわらず安全確認したと誤判定する可能性がある。例えば、視線(又は顔向き)が約5秒間左方向の所定角度を越え、続いて約5秒間右方向の所定角度を越えた後に交差点に進入した場合を考える。この場合、特許文献1に示される車両用情報報知装置では安全確認したと判定する。しかしながら、右方向の確認を終えた時点で、左方向の確認終了後約5秒の時間が経過している。この間に前回の左方向の確認後に交差路に入ってきた車が交差点に接近している可能性がある。したがって、安全確認したとはいえない。
【0007】
また、交差点通過時は、交差点の左方向、右方向それぞれの基準角度で挟まれる領域の安全確認も必要である。しかし、特許文献1に示される車両用情報報知装置は、この領域の安全確認方法を規定していない。安全確認をしたといえるためには、この領域への所定時間以上視線の停留が必要である。
【0008】
本発明は、上記問題点に鑑みなされたものであり、誤判定を低減することができる安全運転診断装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するために請求項1に記載の安全運転診断装置は、車両が交差点に進入する際に、車両のドライバによる安全確認がなされたか否かを判定するものであって、
車両の現在位置を取得する自車位置取得手段と、
直近の信号の無い交差点の進入位置を取得する進入位置取得手段と、
車両の運転席付近の固定点を原点とする直交座標系で検出されたドライバの視線の水平角を取得する水平角取得手段と、
車両が進入位置取得手段にて取得した進入位置から所定距離より長く進入した時点から過去所定時間にわたる水平角をサンプリングするサンプリング手段と、
過去所定時間前の前後所定期間にわたる水平角の平均の絶対値が所定値以上である場合、過去所定時間前の水平角を0とし、過去所定時間の所定期間後の水平角がサンプリング手段にてサンプリングした水平角となるように、サンプリング手段にてサンプリングした水平角を加工する加工手段と、
その絶対値が所定値以上である場合は加工手段による加工後の水平角からパワースペクトルを計算し、絶対値が所定値以上でない場合はサンプリング手段にてサンプリングされた水平角からパワースペクトルを計算するパワースペクトル計算手段と、
パワースペクトル計算手段にて算出したパワースペクトルにおいて、安全確認に必要な水平角の変化の周波数範囲におけるパワーの極大値の和が所定値に達してない場合はドライバによる安全確認がなされてないと判定し、所定値以上である場合はドライバによる安全確認がなされたと判定する安全確認判定手段と、を備えることを特徴とするものである。
【0010】
一般に、ある時間区間でサンプリングした信号において、所定周波数の振幅の大小は、信号のパワースペクトルの所定周波数でのパワーの大小に表れる。また、所定周波数の繰り返し数の大小もパワーの大小に表れる。逆に、パワースペクトルにおいて所定周波数のパワー値が大きいほど、信号の所定周波数の振幅が大きいか、または信号の所定周波数での繰り返し数が多い。
【0011】
従って、安全確認動作時の視線の水平角の絶対値が0[deg]から90[deg]に近づけば近づくほど水平角の変化の周波数における所定範囲のパワーは大きくなる。また、安全確認動作の回数が増えれば増えるほど水平角の変化の周波数における所定範囲のパワーは大きくなる。よって、安全確認に必要な水平角の変化の周波数範囲におけるパワーの極大値の和が所定値以上である場合は、視線の水平角の絶対値は安全上十分、もしくは、安全確認回数は安全上十分であるとみなすことができる。つまり、ドライバは、安全確認に必要な範囲(確認幅)を確認したか、もしくは、安全確認動作を必要回数行ったとみなすことができる。
【0012】
一方、安全確認すべき最小範囲を安全確認する場合、正面、左方向(右方向)、右方向(左方向)、正面の順で視線を動かして、この4箇所を認知するのに必要な時間は、1周期の変化に必要な時間である。従って、この4箇所を認知するのに要する時間は、安全確認に必要な水平角の変化の周波数(範囲)に置き換えることができる。
【0013】
従って、請求項1に示すように、安全確認に必要な水平角の変化の周波数範囲におけるパワーの極大値の和が所定値以上である場合、安全確認のための必要条件である確認時間(確認周波数)と確認幅を満たしたとみなすことができる。よって、交差点において安全確認をしていないにもかかわらず、安全確認をしたと誤判定することを低減することができる。
【0014】
また、例えば、所定時間内に、ドライバがまず交差路を通行する他車を視認し、他車が通行した後に視線をほとんど移動させることなく他車が接近して来た方向を安全確認し、次に他車が接近して来た方向でない方向(言い換えると他車が遠ざかって行った方向)を確認し、さらに、その次に交差点に進入した場合を考える。ここで、他車は交差路を自車から見て左から右へ又は右から左へ通行するので、他車が通行した直後の視線水平角(言い換えると安全確認開始時点の視線の水平角)は、おおよそ0[deg]でなく左方向の所定角または右方向所定角である。
【0015】
この場合、サンプリングした視線の水平角は、左方向の所定角からはじまり右方向の所定角度以上に変化し、その後におおよそ0[deg]になるか、又は右方向の所定角から左方向の所定角度以上に変化し、その後におおよそ0[deg]になる。したがって、サンプリングした視線の水平角の波形の左端(即ちサンプリング初期)は、おおよそ0[deg]になっていない。したがって、サンプリングした視線の水平角が1周期に満たず、4分の3周期となる。4分の3周期の波形のパワースペクトルを計算すると、安全確認で想定できる所定周波数範囲に所定値以上の極大値を持たないことがある。即ち、ドライバは安全確認したにもかかわらず、安全確認がなされていないと判定する問題が発生することがある。
【0016】
そこで、請求項1においては、パワースペクトルを計算する際の水平角は、上述のように加工しているため、水平角のサンプリングを開始した時点付近の水平角が所定値以上である場合は1/4周期が付け加えられることになる。このように加工すると、安全確認がなされたならば、その時間内に水平角が1周期変化する部分を最低1つ含むようになる。言い換えると、視線水平角は、0[deg]から始まり左方向の所定角以上に変化し、次に右方向の所定角度以上に変化し、その後におおよそ0[deg]になるか、または0[deg]から始まり右方向の所定角以上に変化し、次に左方向の所定角度以上に変化し、その後におおよそ0[deg]になる。このように加工した水平角のパワースペクトルを計算すると、安全確認で想定できる所定周波数範囲にパワーの極大値を持ち、極大値の和は所定値以上となる。したがって、安全確認がなされたと判定することができる。
【0017】
よって、請求項1においては、安全確認開始時点での視線の水平角がドライバのおおよそ正面方向でなかった場合に、交差点において安全確認をしたにもかかわらず、安全確認をしてないと誤判定することを低減することができる。
【0018】
また、サンプリングする期間は、請求項2に示すように、進入位置から所定距離より長く進入した時点から過去5秒間とすると好ましい。また、水平角の加工を行う期間は、請求項3に示すように、過去所定時間前から0.7秒間とすると好ましい。
【0019】
また、請求項4に示すように、安全確認判定手段にて安全確認がなされていないと判定した場合は、視線の水平角、車両前方画像データ、及びセンサデータをデータ記憶媒体に記憶することによって、ドライバの間違った思い込みやドライバの運転のくせを直すための情報を、ドライバに提供することが可能となるので好ましい。
【0020】
また、請求項5に示すように、車両前方画像に、視線の水平角及びセンサデータを重畳させた画像(運転診断画像)を表示装置に表示することによって、実際の運転に近い状況を再現することができるので好ましい。
【0021】
また、ドライバは、車両を駐車場(特に、自宅や職場の駐車場)に停車させたときは、心理的に余裕がある場合が多い。そこで、請求項6に示すように、画像の表示指示がなされ、かつ、車両が駐車場に停車した場合に、画像を表示装置に表示することによって、心理的に余裕があるライバに対して、ドライバの間違った思い込みやドライバの運転のくせを直すための情報(運転診断画像)を提供することができるので好ましい。
【図面の簡単な説明】
【0022】
【図1】本発明の実施の形態における安全運転診断ECUの概略構成を示すブロック図である。
【図2】本発明の実施の形態における安全確認すべき最小範囲を示すイメージ図である。
【図3】本発明の実施の形態における安全確認すべき最小範囲を認知するために必要な視線の停留箇所を示すイメージ図である。
【図4】本発明の実施の形態における視線の水平角をサンプリングする範囲を示すイメージ図である。
【図5】本発明の実施の形態における安全運転診断ECUの安全確認判定処理動作を示すフローチャートである。
【図6】(a)は自車位置と交差点の進入位置間の距離[m]と時間[s]との関係を示すグラフであり(b)は図6(a)に対応する視線の水平角[deg]と時間[s]との関係を示すグラフである。
【図7】(a)は交差路に他車の通行無し(つまり、他車の視認なし)でドライバによる安全確認がなされた時の自車位置と交差点の進入位置間の距離[m]と時間[s]との関係を示すグラフであり、(b)は、図7(a)に対応する視線の水平角[deg]と時間[s]との関係を示すグラフである(加工なし)。
【図8】(a)は図7(b)を部分的に拡大したグラフであり、(b)はこのときのパワースペクトルと周波数[Hz]の関係を示すグラフである。
【図9】(a)は交差路に他車の通行有りかつその他者の視認有りの場合であり、ドライバによる安全確認がなされた時の自車位置と交差点の進入位置間の距離[m]と時間[s]との関係を示すグラフであり、(b)は図9(a)に対応する視線の水平角[deg]と時間[s]との関係を示すものであり、水平角の加工なしの場合のグラフである。
【図10】(a)は図9(b)を部分的に拡大したグラフであり、(b)はこのときのパワースペクトルと周波数[Hz]の関係を示すグラフである。
【図11】図9(a)に対応する視線の水平角[deg]と時間[s]との関係を示すものであり、水平角の加工ありの場合のグラフである。
【図12】(a)は図11(a)を部分的に拡大したグラフであり、(b)はこのときのパワースペクトルと周波数[Hz]の関係を示すグラフである。
【発明を実施するための形態】
【0023】
以下、本発明の実施の形態を図に基づいて説明する。
【0024】
図1に示すように、本実施の形態における安全運転診断ECU(Electronic Control Unit;電子制御装置)10は、本発明の安全運転診断装置に相当するものである。
【0025】
このような構成を備える安全運転診断ECU10は、車両(以下、自車両Cとも称する、また図面では自車とも称する)が交差点に進入する際に、車両のドライバによる安全確認がなされたか否かを判定すると共に、ドライバの間違った思い込みやドライバの運転のくせを直すための情報をドライバに提供する車載システムに適用することができる。なお、本実施の形態においては、交差点は、信号機のない平面交差の交差点であり、丁字路、十字路を示すものとする。
【0026】
安全運転診断ECU10は、通常のコンピュータとして構成されており、例えば、周知の中央演算処理装置(Central Processing Unit:略称CPU)、ROM(Read-Only Memory)、RAM(Random Access Memory)、入出力装置(Input and Output device:略称I/O)およびこれらの構成を接続するバスラインなどが備えられている。図1においては、安全運転診断ECU10の機能ブロックをメインに記載している。具体的には、安全運転診断ECU10は、距離判定部11、進入距離判定部12、安全確認判定部13、記憶媒体14、画像生成部15、バッファ16a,16b、スイッチ17a〜17dなどを備える。
【0027】
また、図1に示すように、安全運転診断ECU10は、ナビゲーションシステム20、視線センサ30、車速センサ40(車載センサ群)、アクセルペダル開度センサ50(車載センサ群)、ストップランプスイッチ60(車載センサ群)、ドライブレコーダ70、ディスプレイ80などの外部装置が電気的に接続される。
【0028】
ナビゲーションシステム20は、車両の現在位置(自車位置)を検出する位置検出器、電子地図のデータを記憶している地図データ記憶装置などを備える。位置検出器は、いずれも周知の地磁気センサ、ジャイロスコープ、距離センサ、及び衛星からの電波に基づいて車両の位置を測定するGPS(Global Positioning System)のためのGPS受信機などを採用することができる。
【0029】
また、地図データ記憶装置に記憶された電子地図のデータには、道路を示すリンクデータとノードデータとが含まれる。ここで、リンクとは、地図上の各道路を交差・分岐・合流する点等の複数のノードにて分割したときのノード間を結ぶものであり、各リンクを接続することにより道路が構成される。リンクデータは、リンクを特定する固有番号(リンクID)、リンクの長さを示すリンク長、リンクの始端及び終端ノード座標(緯度・経度)、道路名称、道路種別、道路幅員、車線数、右折・左折専用車線の有無とその専用車線の数、制限速度、および所定距離ごとの道路中心の座標の情報等の各データから構成される。一方、ノードデータは、地図上の各道路が交差、合流、分岐するノード毎に固有の番号を付したノードID、ノード座標、ノード名称、ノードに接続するリンクのリンクIDが記述される接続リンクID、交差点種類、交差点における信号機の有無、交差点の入り口(交差点の進入位置)の座標、交差点の入り口の幅、および交差点の中心座標の情報等の各データから構成される。なお、安全運転診断ECU10は、このナビゲーションシステム20から車両が駐車場に停車しているか否かの情報、直近の交差点における進入位置、直近の交差点における信号機の有無、自車位置など情報を取得する(自車位置取得手段、進入位置取得手段)。
【0030】
視線センサ30は、車両の運転席付近の固定点を原点とする直交座標系でドライバDの視線の水平角を検出し、その水平角(以下、水平角信号とも称する)を出力するものである。視線センサ30は、例えば、自車両CのドライバDの目を含む範囲を撮像する撮像装置(自車両Cに固定して設置されており、撮像方向も固定される)で得られた画像のデータを逐次(例えば100msecごとに)取得する画像取得部、画像取得部から送られてきた画像のデータに基づいて、公知の画像認識技術を用いて画像解析を行い、画像取得部で取得した画像中でのドライバDの黒目の位置を検出する黒目位置検出部、黒目位置検出部から送られてきた黒目の位置の情報に基づいてドライバDの視線の方向を逐次算出する視線方向算出部などを備えるものを採用することができる。なお、虹彩と瞳孔とからなる部分を黒目として用いてもよいし、瞳孔の部分または虹彩の部分を黒目として用いてもよい。また、ここで視線の水平角は、視線のXY平面(水平面)への射影がX軸となす角である。また、X軸は車両の進行方向である。安全運転診断ECU10は、この視線センサ30から水平角(水平角信号)を取得する(水平角取得手段)。
【0031】
車速センサ40は、自車両Cの車軸等に設置され、自車両Cの走行速度を示す検出信号(センサデータ)を出力する。アクセルペダル開度センサ50は、自車両CのドライバDによる、図示しないアクセルペダルの踏込量に応じた検出信号(センサデータ)を出力する。ストップランプスイッチ60は、自車両CのドライバDによって、図示しないブレーキペダルが操作されたときに検出信号(センサデータ)を出力する。
【0032】
ドライブレコーダ70は、例えば、自車両Cのフロントガラスの内側に装着される小型CCDカメラ(車両前方方向撮影用カメラ)、車速センサ40から車速の情報を受信する部材、加速度センサ、メモリカードなどを備える。ドライブレコーダ70は、小型CCDカメラによって車両前方方向の画像(以下、車両前方画像データとも称する)を常時(例えばドライブレコーダ70の起動中)撮像し続けるとともに、それに同期した車速や加速度の情報等の車両の挙動の情報も取得し続ける。
【0033】
ディスプレイ80(表示装置)は、例えば、液晶ディスプレイ、有機ELディスプレイなどを採用することができる。このディスプレイ80は、安全運転診断ECU10(画像生成部15)からの画像データを表示する。
【0034】
安全運転診断ECU10における距離判定部11及び進入距離判定部(進入判定手段)12は、ナビゲーションシステム20から取得した情報(直近の交差点における進入位置、直近の交差点における信号機の有無、自車位置などの情報)に基づいて、視線センサ30から水平角信号を取得してバッファ16aに記憶する区間に、自車両Cが位置するか否かを判定するものである。具体的には、距離判定部11は、ナビゲーションシステム20からの信号に基づいて、自車両Cが直近の交差点の進入位置まで48[m]以内の位置にあるか否かを判定する。一方、進入距離判定部12が、自車両Cが直近交差点の進入位置から2[m]より長く進入したか否かを判定する。
【0035】
安全確認判定部13は、車両が交差点に進入する際に、車両のドライバDによる安全確認がなされたか否かを判定する部分である。この安全確認判定部13は、サンプリング部13a、加工部13b、パワースペクトル計算部13c、周波数抽出部13d、総和計算部13e、比較部13fなどを含む。
【0036】
サンプリング部13aは、進入位置から所定距離より長く進入した時点から過去5[s]間(進入判定直前の過去5秒間)の水平角信号をサンプリングする(サンプリング手段)。この5[s]間は本発明における過去所定時間に相当する。つまり、自車両Cが直近交差点の進入位置から2[m]より長く進入したと判定された直前の5[s]間の水平角信号をサンプリングする。従って、このサンプリング部13aは、過去(交差点の進入位置から所定距離より長く進入した時点以前の5[s]間)に取得してバッファ16aに一時的に記憶しておいた水平角信号をサンプリングする。なお、サンプリング部13aがサンプリングする5[s]間の根拠に関しては後ほど説明する。
【0037】
加工部13bは、自車両Cが直近交差点の進入位置から2[m]より長く進入したと判定された直前の5[s]前(過去所定時間前)の前後における(例えば、長く進入したと判定された時点の6.4[s]前から4.3[s]前の2.1[s]間)にわたる水平角の平均の絶対値が所定値(例えば、17.5[deg])以上である場合に、サンプリング部13aにてサンプリングした水平角信号を加工する。なお、この2.1[s]は、視線の水平角が1周期変化するのに要する時間の下限0.66[s]と上限5.0[s]の平均である2.8[s]の3/4の時間である。また、この3/4の理由を以下に説明する。3/4は、仮にドライバが交差路を通行している他車を視認しておらず左右確認しているなら、視線の水平角は左方向→右方向または右方向→左方向の変化を含む周期である。そして、含むならば、2.1秒の時間内の視線の水平角の平均の絶対値は所定値未満になると考えた。反対に、2.1秒の時間内の視線の水平角の平均の絶対値は所定値以上であれば、左右確認していない、即ち他車を視認していると考えた。
【0038】
このように、サンプリング部13aにてサンプリングした水平角信号を加工するのは、安全確認をしたにもかかわらず安全確認をしていないと誤判定することを低減するためである。
【0039】
つまり、所定時間内に、ドライバがまず交差路を通行する他車を視認し、他車が通行した後に視線をほとんど移動させることなく他車が接近して来た方向を安全確認し、次に他車が接近して来た方向でない方向(言い換えると他車が遠ざかって行った方向)を確認し、さらに、その次に交差点に進入した場合を考える。ここで、他車は交差路を自車から見て左から右へ又は右から左へ通行するので、例えば、図6(b)に示すように、他車が通行した直後の視線水平角(言い換えると安全確認開始時点の視線の水平角)は、おおよそ0[deg]でなく左方向の所定角または右方向所定角である。なお、図6(a)は、自車位置と交差点の進入位置間の距離[m]と時間[s]との関係を示すグラフであり、図6(b)は、図6(a)に対応する視線の水平角[deg]と時間[s]との関係を示すグラフである。
【0040】
この場合、サンプリングした視線の水平角は、左方向の所定角からはじまり右方向の所定角度以上に変化し、その後におおよそ0[deg]になるか、又は右方向の所定角から左方向の所定角度以上に変化し、その後におおよそ0[deg]になる。したがって、サンプリングした視線の水平角の波形の左端(即ちサンプリング初期)は、おおよそ0[deg]になっていない。したがって、サンプリングした視線の水平角が1周期に満たず、4分の3周期となる。4分の3周期の波形のパワースペクトルを計算すると、安全確認で想定できる所定周波数範囲に所定値以上の極大値を持たないことがある。即ち、ドライバは安全確認したにもかかわらず、安全確認がなされていないと判定する問題が発生することがある。なお、パワースペクトルの計算、安全確認がなされたか否かの判定などに関しては、後ほど説明する。
【0041】
そこで、本実施の形態においては、パワースペクトルを計算する際の水平角は、水平角のサンプリングを開始した時点付近の水平角が所定値以上である場合は1/4周期が付け加えられるように加工する。このように加工すると、安全確認がなされたならば、その時間内に水平角が1周期変化する部分を最低1つ含むようになる。つまり、本発明の特徴は、自車が交差点の進入位置から2[m]より長く進入した時点から5[s]内に安全確認がなされたならば、その時間内に視線水平角が1周期変化する部分を最低1つ含むよう、サンプリングした視線の水平角を加工することである。
【0042】
言い換えると、視線水平角は、0[deg]から始まり左方向の所定角以上に変化し、次に右方向の所定角度以上に変化し、その後におおよそ0[deg]になるか、または0[deg]から始まり右方向の所定角以上に変化し、次に左方向の所定角度以上に変化し、その後におおよそ0[deg]になる。このように加工した水平角のパワースペクトルを計算すると、安全確認で想定できる所定周波数範囲にパワーの極大値を持ち、極大値の和は所定値以上となる。したがって、安全確認がなされたと判定することができる。
【0043】
具体的には、加工部13bは、図6(b)に示すように、自車両Cが直近交差点の進入位置から2[m]より長く進入したと判定(△印)された直前の5[s]前の水平角を0とし、5[s]の0.7[s]後(所定期間後)の水平角がサンプリング部13aにてサンプリングした水平角となるように加工する(加工手段)。換言すると、サンプリング開始時点の水平角は0にし、かつサンプリング開始時点から0.7[s]経過した時点までの視線水平角は、0から0.7[s]経過した時点での実際の視線の水平角に徐々に近づける。
【0044】
つまり、変化中の波形は、初期位相0[deg]、角周波数360/2.8[deg/s]の正弦関数の始めの0秒〜0.7秒の波形をA倍した値とする。ここでAは、交差点に進入した時点の4.3秒前にサンプリングした視線水平角[deg]である。このように加工した後の視線の水平角(水平角信号)は、他車視認に応じた加工後の視線水平角とも称する。これによって、5[s]前から0.7[s]後(0.7秒間)の間における水平角が正弦波の1/4周期となるように加工することになる。
【0045】
なお、後ほど説明するが、視線の水平角が、正面→左方向→右方向→正面または正面→右方向→左方向→正面と変化するのに要する時間は約0.66[s]〜5.0[s]である。上述の0.7[s]は、この変化に要する時間の平均2.8[s]の1/4(周期に相当)に基づくものである。なお、平均2.8を用いる理由は、確認時間は0.66[s]〜5.0[s]内であるものの、より正確な時間は分からないからである。また、1/4を用いる理由は、0.7秒間の加工部分は、正面→左方向→右方向→正面のうちの正面→左方向の部分、または正面→右方向→左方向→正面のうちの正面→右方向の部分であるから、つまり視線水平角の1周期変化のはじめの1/4周期部分だからである。
【0046】
なお、加工部13bは、自車両Cが直近交差点の進入位置から2[m]より長く進入したと判定された直前の5[s]前の前後における水平角の平均の絶対値が所定値以上でない場合は、加工を行わない。従って、サンプリング部13aでサンプリングされた水平角信号は、そのままパワースペクトル計算部13cに出力される。
【0047】
パワースペクトル計算部(パワースペクトル計算手段)13cは、視線センサ30から取得した水平角信号(加工有り又は加工無し)のパワースペクトルを計算するものである。つまり、加工部13bで加工された水平角又は、加工部13bでの加工がなされてない水平角(サンプリング部13aから出力された水平角)のパワースペクトルを計算するものである。例えば、視線センサ30から取得した水平角信号をフーリエ変換し、そのフーリエ変換した結果に対して、各周波数の大きさ成分を二乗してパワースペクトルを算出する。
【0048】
周波数抽出部13dは、パワースペクトル計算部13cの計算結果より、水平角の変化の周波数0.2〜1.5[Hz]間でパワーが極大となる周波数を抽出する。そして、総和計算部13eは、周波数抽出部13dにて抽出した周波数でのパワーの極大値の総和を計算する。そして、比較部13fは、総和計算部13eにて計算した総和と判定値(ここでは、12000)と比較する。なお、水平角の変化の周波数(確認周波数)、パワーが極大となる周波数、判定値に関しては後ほど説明する。
【0049】
記憶媒体(データ記憶媒体)14は、視線の水平角と同時に取得した車両前方画像データ、及びセンサデータを記憶するものである。特に、本実施の形態においては、水平角信号、車両前方画像データ、及びセンサデータをバッファ16a及び16bに一時記的に記憶しておき(一時記憶手段)、安全確認判定部13にて安全確認がなされていないと判定された場合に水平角信号、車両前方画像データ、及びセンサデータが記憶媒体14に記憶される。
【0050】
画像生成部15は、水平角信号、車両前方画像データ、及びセンサデータからディスプレイ80で表示可能な画像を生成するものである。
【0051】
バッファ16a,16bは、水平角信号、車両前方画像データ、及びセンサデータなどを一時的に記憶するものである(一時記憶手段)。具体的には、バッファ16aは、視線センサ30から取得した水平角信号を一時的に記憶する(一時記憶手段)。一方、バッファ16bは、車速センサ40、アクセルペダル開度センサ50、ストップランプスイッチ60から取得したセンサデータ、及びドライブレコーダ70から取得した車両前方画像データを一時的に記憶する(一時記憶手段)。
【0052】
スイッチ17aは、距離判定部11が直近交差点の進入位置から48[m]以内に自車両Cがあると判定した場合にオンし、それ以外の場合はオフする。また、スイッチ17bは、進入距離判定部12が自車両Cが直近交差点の進入位置から2[m]進入したと判定した場合にオンし、所定のタイミング(例えば、自車両Cが直近交差点の進入位置から12[m]以内に達したときなど)でオフする。これは、車両が確認区間に位置する場合に水平角信号などを取得するためである。
【0053】
スイッチ17cは、比較部13fがパワーの総和が判定値を下回ったと判定した場合にオンし、それ以外の場合はオフする。これは、パワーの総和が判定値を下回った場合に、バッファ16a,16bに一時的に記憶された水平角信号、車両前方画像データ、及びセンサデータを記憶媒体14に記憶させるためである。
【0054】
スイッチ17dは、ナビゲーションシステム20から自車両Cが駐車場(例えば、自宅や職場の駐車場)に停車したことを示す信号(例えば「1」)を取得するとオンし、それ以外の場合(例えば「0」)はオフする。これは、自車両Cが駐車場(例えば、自宅や職場の駐車場)に停車した場合に、車両前方画像データ、及びセンサデータからディスプレイ80で表示可能な画像を生成して、ディスプレイ80に表示するためである。
【0055】
このような構成を備える本実施の形態における安全運転診断ECU10は、信号の無い交差点において安全確認していないにもかかわらず安全確認したという誤判定の頻度を減らすこと、及び安全確認をしたにもかかわらず安全確認をしていないと誤判定することを低減することを目的とするものである。
【0056】
安全確認には、確認幅が十分であること(言い換えれば、視線の水平角の幅が所定値以上であることと)、確認時間が適切であること(言い換えれば、確認時間が短すぎずかつ長過ぎないこと)の少なくとも2つが必要である。また、確認幅と確認時間の2つは、確認幅と確認速度に、さらに確認幅と確認周波数の2つに言い換えることができる。また、本実施の形態における安全運転診断ECU10のより具体的な目的は、視線の水平角から確認幅と確認周波数という2つの必要条件の成立を検証できる判定法を定めることである。
【0057】
なお、安全確認は、自車両Cが他車と衝突することを回避するための行動である。言い換えると、安全確認は、自車両Cがこれから交差点に進入するに際して、交差点を含む左右方向それぞれの所定範囲に他車が存在しないことを確認する行動である。
【0058】
ここで、図2を用いて、その所定範囲に関して説明する。所定範囲は、仮にその範囲に現在他車が存在しかつ自車両Cが交差点に進入した場合に、交差点内で自車両Cが他車に接近する可能性がある範囲である。つまり、自車両Cの位置は車両前端の位置とし、交差点の進入位置は交差点手前の2つの端点を結ぶ線分とした場合、所定範囲は、交差点の中心から交差路の左右方向へ所定距離内である。
【0059】
交差点の左端及び右端からそれぞれ交差路上左方向、交差路上右方向それぞれの所定距離A[m]とする。すると、A[m]は、その交差路において他車の速度V0[m/s]に安全確認に要する時間Tv[s]と、安全確認後に交差点に進入するまでの時間Te[s]と自車両Cが交差点内を通行する時間Ti[s]の3つの時間の和(Tv[s]+Te[s]+Ti[s])を乗じた値が適切である。
【0060】
本実施の形態における安全運転診断ECU10は、所定距離Aの最小値を定め、視線が向いた範囲がその距離から定まる所定範囲以下とみなした場合に、安全確認でなかったと判定する。逆に、視線が向いた範囲が所定範囲以上とみなした場合に、安全確認と判定する。
【0061】
ここで所定距離Aの最小値A*を式で表現すると、A*=min(V0)×{min(Tv)+min(Te)+min(Ti)}[m]となる。そこで、所定距離Aの最小値A*を定めるために、各V0、Tv、Te、Tiの最小値を説明する。
【0062】
交差路を通行する他車の速度V0は、交差路の幅が狭いほど小さいと考える。例えば、交差路の幅の最小値は、約5[m]と定め、V0の最小値を20[km/h]とする。
【0063】
次に、安全確認に要する時間Tv[s]は、交差路の視認のしやすさ、ドライバDの視力等に応じて変化するが、最小値は約0.7[s]とする。
【0064】
安全確認後に交差点に進入するまでの時間Te[s]は、安全確認後に所定時間以上走行後交差点に進入する場合と、安全確認後速やかに交差点に進入する場合があるが、通常、安全確認後速やかに交差点に進入する場合の方が短い。そこで、Te[s]の最小値は安全確認後速やかに交差点に進入する場合を想定して約0.5[s]とする。
【0065】
また、自車両Cが交差点内を通行する時間Ti[s]は、交差点の大きさが小さいほど、また自車両C速度が大きいほど、小さいと考える。交差点の大きさの最小値は約5[m]四方、かつ自車両C速度の最大値は30[km/h]、かつ車両の全長は5[m]と定める。このように定めると、Ti[s]の最小値は1.2[s]である。
【0066】
以上をまとめると、V0の最小値は20[km/h]、Tvの最小値は0.7[s]、Teの最小値は0.5[s]、Tiの最小値は1.2[s]である。したがって、交差点の左端及び右端からそれぞれ交差路上左方向・交差路上右方向の所定距離Aの最小値A*は13.3[m]である。よって、確認すべき最小範囲は、交差点の左端から交差路上左方向へ13.3[m]の位置から交差点を内含み交差点の右端から交差路上右方向へ13.3[m]の位置までである。なお、図2は、交差点を上から見た図において確認すべき最小範囲を含む図である。
【0067】
次に、図2を用いて、最小範囲を確認するために必要な視線の水平角の角度幅に関して説明する。角度幅は、視覚には視野があることを前提として求める。言い換えれば、視線の周囲のある角度幅は、確認可能であることを前提として求める。その結果、最小範囲を確認するために必要な視線の水平角の角度幅は、まず自車両C内のドライバD位置から最小範囲の左右端それぞれの方向への角度を求め、次にそれらの角度から視野分を差し引くことより求められる。
【0068】
自車両C内のドライバDの目の位置から最小範囲の左右端それぞれの方向への角度は、自車両C位置と交差点の間の距離により変化する。より具体的には、その距離が長いほど角度の絶対値は小さい。そこで、本実施の形態においては、最小範囲の左右端に対応する角度は、自車両Cが交差点の進入位置から最も遠い位置にある時の角度、すなわち絶対値が最も小さい角度とする。
【0069】
そこで、次に、最小範囲の左右端それぞれの方向への角度を定めるための交差路の進入位置から最も遠い自車両C位置を規定する。この位置は、安全確認が終了する位置のうち交差路の進入位置から最も遠い位置とする。交差路の進入位置から最も遠い自車両C位置までの距離L*を式で表現すると、L*=max(V)×Te[m]となる。ここでV[m/s]は自車両Cの速度である。L*は、交差路上左方向、交差路上右方向それぞれの所定距離A[m]を求めた時の仮定と整合させるために、安全確認後に自車両Cが交差点に進入するまでの時間Te[s]が最小値0.5[s]である条件のうちから定める。
【0070】
この条件の下でさらに、自車両Cの想定し得る最大速度を30[km/h]と仮定すると、交差点の進入位置から4.2mが最も遠い位置となる。そうすると、自車両Cが交差点の進入位置から最も遠い位置にある場合のドライバDの目の位置から確認すべき最小範囲の左右端それぞれの方向への角度は約−61[deg]、+61[deg]となる。
【0071】
ここで、ドライバDの右の直交方向を+90[deg]、ドライバDの左の直交方向を−90[deg]、ドライバDの正面方向を0[deg]とする。また、自車両C位置すなわち車両前端からドライバDの目の位置までの距離は2mとする。次に、水平方向の視野は35[deg]である、言い換えると視線の水平角の周囲±17.5[deg]は確認可能であると仮定すると、最小範囲を確認するために必要な視線の水平角の角度幅は±43.5[deg]である。なお図2は、交差点を上から見た図において必要な視線の水平角の角度幅を含む図である。ちなみに最小範囲を確認するために必要な視線の水平角の角度幅は、θ*=atan{(A*+W/2)/(L*+W/2+E)}−φ/2[deg]とおくと、±θ*[deg]と表される。ここでW[m]は交差点の1辺の長さ、E[m]は車両前端からドライバDの目の位置までの距離、φ[deg]は水平方向の視野である。
【0072】
次に、本実施の形態の安全運転診断ECU10における安全確認を行う必要条件に関して説明する。これは、安全確認とみなす時間に関する必要条件である。具体的には、安全確認は、自車両Cが交差点の進入位置から所定距離より長く進入した時点以前の5[s]間(本発明における過去所定時間に相当する)の行動とする条件である。つまり、サンプリングする範囲は、自車両Cが交差点の進入位置から所定距離より長く進入した時点直前の5[s]間である。
【0073】
自車両Cが交差点の進入位置から所定距離より長く進入した時点を時間の最終時点とする理由は、ドライバDが視界を遮られることのない地点に到達した時点を時間の最終時点としたいからである。
【0074】
また、5[s]としたのは、以下の理由によるものである。まず、ドライバの左右確認時の視線の水平角の変化周波数は、後述するように人間工学上0.2Hzから1.5Hzの間であり、この周波数範囲のパワーにより左右確認を判定する。このように範囲を規定しているので、この2つの端の周波数のパワーは計算したい。また、一定周期でサンプリングした視線の水平角からパワーを計算する場合、パワーが計算される周波数は離散値である。したがって、サンプリング周期やサンプリング時間によって0.2Hzでパワーを計算できても1.5Hzで計算できないことが起こり得る。さらに、実際の左右確認では視線水平角の周波数は、たいてい0.2Hzから0.6Hzの間であり、1.5Hz以上になることはまれである。したがって、0.2Hz付近のパワーは、1.5Hz付近のパワーに比べて大きい。そこで、2つの端のうち0.2Hzの方のパワーを確実に計算するためである。
【0075】
ちなみに、自車両Cが直近交差点の進入位置から所定距離より長く進入した時点以前の5秒間に自車両Cが位置する範囲は、自車両Cが想定し得る最高速度で走行し続けた場合に最大となり、自車両Cが交差点の進入位置近くで停止した場合に最小となる。自車両Cが想定しうる最高速度を約30[km/h]とすると、自車両Cが位置する範囲は約50[m]となる(図4参照)。また、自車両Cが交差点の進入位置で約5[s]間停止した後発進し、発進後約1[s]で交差点の進入位置から所定距離に位置したとすると、6[s]間に自車両Cが位置する範囲は所定距離に等しい2[m]である。
【0076】
次に、安全確認中の視線の水平角の変化速度に関して説明する。本実施の形態における安全運転診断ECU10では、人間工学の教科書である横溝他著「エンジニアのための人間工学(日本出版サービス社)」の84〜85ページに記された数値を採用し、人間が1箇所を認知する時間は、145[ms]〜1070[ms]であるとする。ここで、認知する時間は、眼球運動、対象への停留、焦点合わせ、特性取り込み、感覚記憶、認知の各時間の和である。また、本実施の形態においては、上述のように、安全確認すべき最小範囲の左右端それぞれの方向への角度は約−61[deg]、+61[deg]とする。また水平方向の視野は35[deg]と仮定する。また、安全確認開始時及び安全確認終了時の視線の水平角はドライバDの正面方向、言い換えれば水平角は0[deg]とする。
【0077】
これらの仮定の下では、安全確認すべき最小範囲を認知するためには、視線の水平角の停留箇所は、図3に示す停留箇所1〜停留箇所4の最低4箇所必要である。また、4箇所を認知する時間は1箇所を認知する時間の4倍の580[ms]〜4280[ms]となる。4箇所を認知した時間にさらに眼球を正面に戻す時間である70[ms]〜700[ms]を加えると、安全確認すべき最小範囲の4箇所を認知する時間は650[ms]〜4980[ms]となる。
【0078】
つまり、視線の水平角が、正面→左方向→右方向→正面または正面→右方向→左方向→正面と変化するのに要する時間は650[ms]〜4980[ms]である。この変化は1周期の変化であるので、1周期の変化に要する時間は650[ms]〜4980[ms]である。言い換えると、安全確認のため4箇所を認知する時の視線の水平角の変化の周波数は0.2[Hz]〜1.5[Hz]である。
【0079】
以上のことより、確認幅が視線の水平角の角度幅として±43.5[deg]以上であること、また確認時間(確認周波数)に対応する条件として視線水平角の変化の周波数は0.2[Hz]〜1.5[Hz]であることは、それぞれ安全確認の必要条件である。つまり、安全確認に必要な水平角の変化の周波数範囲は、0.2[Hz]〜1.5[Hz]である。
【0080】
本実施の形態における安全運転診断ECU10は、上述の視線の水平角の角度幅と水平角の変化の周波数(確認周波数)に着目し、視線の水平角のパワースペクトルにより安全確認を判定するものである。一般に、ある時間区間でサンプリングした信号において、所定周波数の振幅の大小は、信号のパワースペクトルの所定周波数でのパワーの大小に表れる。また、所定周波数の繰り返し数の大小もパワーの大小に表れる。逆に、パワースペクトルにおいて、所定周波数のパワー値が大きいほど、信号の所定周波数の振幅が大きいか、または信号の所定周波数での繰り返し数が多い。
【0081】
したがって、安全確認時の視線水平角の絶対値が0[deg]から90[deg]に近づけば近づくほど0.2[Hz]〜1.5[Hz]の範囲のパワーは大きくなる。また、安全確認の回数が増えれば増えるほど0.2[Hz]〜1.5[Hz]の範囲のパワーは大きくなる。
【0082】
そこで、本実施の形態における安全運転診断ECU10は、自車両Cが交差点の進入位置から所定距離より長く進入した時点以前の5[s]間(本発明における過去所定時間に相当する)の水平角をサンプリングする。そして、視線の水平角の0.2[Hz]〜1.5[Hz]間のパワーの極大値の和が所定値以上であるならば、視線水平角の絶対値が安全上十分または安全確認回数が安全上十分とみなし、ドライバによる安全確認がなされたと判定する。反対にそうでない場合は、ドライバによる安全確認がなされなかった判定する。なお、本実施の形態においては、判定値は約12000とする。
【0083】
この判定値(12000)は、安全確認したにもかかわらず安全確認でないと誤判定する可能性を低くするよう、必要最低限の安全確認における0.2Hz〜1.5Hz間のパワーの極大値の和とした。具体的には、角度幅±約43.5[deg]、周波数約0.6Hzすなわち周期約1.7[s]で1周期分の視線水平角の変化を、必要最低限の安全確認と仮定する。ここで、角度幅±約43.5[deg]は交差路を通行する他車を視野に収めるために必要な角度である。また、周期約1.7[s]はドライバの実際の安全確認で想定した最短の視線水平角の変化周期である。
【0084】
ここで、図5に基づいて、本実施の形態における安全運転診断ECU10の安全確認判定処理動作に関して説明する。なお、図5のフローチャートに示す処理動作は、例えば、安全運転診断ECU10に電源供給がなされた場合などにスタートして、所定時間毎に繰り返し実行するものである。
【0085】
ステップS10では、安全運転診断ECU10は、ナビゲーションシステム20からの信号に基づいて、直近の交差点の進入位置(交差点入口)を検出する。ステップS11では、安全運転診断ECU10は、ナビゲーションシステム20からの信号に基づいて、直近の交差点に信号機がないか否かを判定する。そして、信号機がないと判定した場合はステップS12へ進み、信号機があると判定した場合はドライバによる安全確認が行われたか否かを判定する必要ながいとみなしてステップS23へ進む。
【0086】
ステップS12では、距離判定部11は、ナビゲーションシステム20からの信号に基づいて、自車両Cが直近の交差点の進入位置まで48[m]以内の位置にあるか否かを判定する。そして、48[m]以内の位置にあると判定した場合はステップS13へ進み、48[m]以内の位置にないと判定した場合はステップS23へ進む。これは、上述のように、ドライバが安全確認動作を行うべき範囲とみなす時間(期間)であるか否か、つまり、視線の水平角信号の取得を開始するか否かを判定するためである。
【0087】
ステップS13では、距離判定部11は、視線センサ30から出力された水平角信号を取得してバッファ16aに一時的に記憶する。具体的には、距離判定部11は、自車両Cが直近の交差点の進入位置から48[m]の範囲にある場合にスイッチ17aをオンすることによって、視線センサ30から出力された水平角信号を取得してバッファ16aに一時的に記憶する。
【0088】
ステップS14では、距離判定部11は、スイッチ17aをオンすることによって、水平角信号と同時に、車速センサ40、アクセルペダル開度センサ50、ストップランプスイッチ60(車載センサ群)から出力されたセンサデータをサンプリング(取得、センサデータサンプリング手段)すると共に、ドライブレコーダ70から出力された車両前方画像データをサンプリング(取得、画像データサンプリング手段)してバッファ16bに記憶する。
【0089】
ステップS15では、進入距離判定部12は、ナビゲーションシステム20からの信号に基づいて、自車両Cが直近の交差点の進入位置から2[m]より長く進入(所定距離以上進入)したか否かを判定する(進入判定手段)。そして、2[m]より長く進入したと判定した場合はステップS16へ進み、2[m]より長く進入していないと判定した場合は処理を終了する。なお、進入距離判定部12は、自車両Cが直近交差点の進入位置から2[m]進入したと判定した場合にスイッチ17bをオンする。
【0090】
そして、進入距離判定部12が、自車両Cが直近交差点の進入位置から2[m]より長く進入したと判定した場合(ステップS15でYES)、ステップS16において、サンプリング部13aは、進入判定直前の5[s]間の水平角信号をサンプリングする。つまり、自車両Cが直近交差点の進入位置から2[m]より長く進入したと判定された直前の5[s]間の水平角信号をサンプリングする。従って、このサンプリング部13aは、過去(交差点の進入位置から所定距離より長く進入した時点以前の5[s]間)に取得してバッファ16aに一時的に記憶しておいた水平角信号をサンプリングする。
【0091】
ステップS17では、加工部13bは、水平角信号の加工を実施するか否かの判定をして、加工を実施すると判定した場合はステップS18へ進み、加工を実施しないと判定した場合はステップS19へ進む。このとき、加工部13bは、バッファ16aに一時的に記憶しておいた水平角信号を用いて自車両Cが直近交差点の進入位置から2[m]より長く進入したと判定された直前の5[s]前の前後における水平角の平均の絶対値を算出する。そして、その絶対値の値が所定値(例えば、17.5[deg])以上である場合は安全確認開始時点ではユーザーが正面を向いてないとみなして加工すると判定し、所定値以上でない場合は安全確認開始時点ではユーザーが正面を向いているとみなして加工しないと判定する。
【0092】
そして、ステップS18では、加工部13bは、サンプリング部13aにてサンプリングした水平角信号を加工する。具体的には、加工部13bは、図6(b)に示すように、自車両Cが直近交差点の進入位置から2[m]より長く進入したと判定された直前の5[s]前の水平角を0とし、5[s]の0.7[s]後の水平角がサンプリング部13aにてサンプリングされた水平角となるように加工する(加工手段)。換言すると、サンプリング開始時点の水平角は0にし、かつサンプリング開始時点から0.7[s]経過した時点までの視線水平角は、0から0.7[s]経過した時点での実際の視線の水平角に徐々に近づける。図6(b)中の一点鎖線の部分が加工した部分(水平角)である、
つまり、波形は、初期位相0[deg]、角周波数360/2.8[deg/s]の正弦関数の始めの0秒〜0.7秒の波形をA倍した値とする。ここでAは、交差点に進入した時点の4.3秒前にサンプリングした視線水平角[deg]である。このように加工した後の視線の水平角(水平角信号)は、他車視認に応じた加工後の視線水平角とも称する。これによって、5[s]前から0.7[s]後の間における水平角が正弦波の1/4周期となるように加工することになる。このようにすることによって、安全確認がなされていれば、その時間内に水平角が1周期変化する部分を最低1つ含むようになる。
【0093】
ステップS19では、パワースペクトル計算部13cは、加工部13bで加工された水平角又は、加工部13bでの加工がなされてない水平角(サンプリング部13aから出力された水平角)のパワースペクトルを計算する(パワースペクトル計算手段)。例えば、視線センサ30から取得した水平角信号をフーリエ変換し、そのフーリエ変換した結果に対して、各周波数の大きさ成分を二乗してパワースペクトルを算出する。
【0094】
ステップS20では、周波数抽出部13dは、パワースペクトル計算部13cの計算結果より、水平角の変化の周波数0.2[Hz]〜1.5[Hz]間でパワーが極大となる周波数を抽出する。そして、総和計算部13eは、周波数抽出部13dにて抽出した周波数でのパワーの極大値の総和を計算する。
【0095】
ステップS21では、比較部13fは、総和計算部13eにて計算した総和(極大値の和)と判定値(ここでは、12000)と比較して、極大値の和が12000以上であるか否かを判定する(安全確認判定手段)。そして、極大値の和が12000以上であると判定した場合はドライバによる安全確認がなされたとみなしてステップS23へ進み、極大値の和が12000以上でないと判定した場合はドライバによる安全確認がなされていないとみなしてステップS22へ進む。
【0096】
なお、図7(a)は、交差路に他車の通行無し(つまり、他車の視認なし)でドライバによる安全確認がなされた時の自車位置と交差点の進入位置間の距離[m]と時間[s]との関係を示すグラフである。図7(b)は、図7(a)に対応する視線の水平角[deg]と時間[s]との関係を示すグラフである(加工なし)。図8(a)は、図7(b)を部分的に拡大したグラフである。図8(b)は、このときのパワースペクトルと周波数[Hz]の関係を示すグラフである。なお、このとき、自車が直近交差点の進入位置から2mより長く進入した時点の6.4[s]前から4.3[s]前の2.1[s]間の視線の水平角の平均値は±15.9[deg]である。この場合、0.2[Hz]〜1.5[Hz]間のパワーの極大値の和は100430である。よって、この例からも極大値の和が12000以上であると判定した場合はドライバによる安全確認がなされたとみなすことができる。
【0097】
このように、安全確認に必要な水平角の変化の周波数範囲におけるパワーの極大値の和が所定値以上である場合、安全確認のための必要条件である確認時間(確認周波数)と確認幅を満たしたとみなすことができる。つまり、確認幅と確認時間(確認周波数)が必要条件を満たした場合に、ドライバDによる安全確認がなされたと判定する。よって本実施の形態の安全運転診断ECU10は、安全確認がなされたか否かの判定の信頼度が高く、交差点において安全確認をしていないにもかかわらず、安全確認をしたと誤判定することを低減することができる。
【0098】
次に、図9(a)は、交差路に他車の通行有りかつその他車の視認有りの場合であり、ドライバによる安全確認がなされた時の自車位置と交差点の進入位置間の距離[m]と時間[s]との関係を示すグラフである。図9(b)は、図9(a)に対応する視線の水平角[deg]と時間[s]との関係を示すものであり、水平角の加工なしの場合のグラフである。図10(a)は、図9(b)を部分的に拡大したグラフである。図10(b)は、このときのパワースペクトルと周波数[Hz]の関係を示すグラフである。なお、このとき、自車が直近交差点の進入位置から2mより長く進入した時点の6.4[s]前から4.3[s]前の2.1[s]間の視線の水平角の平均値は±51.5[deg]である。この場合、0.2[Hz]〜1.5[Hz]間のパワーの極大値の和は7109である。この例からもわかるように、ドライバがまず交差路を通行する他車を視認した場合、ドライバは安全確認したにもかかわらず、安全確認がなされていないと判定されてしまう。
【0099】
次に、図11は、図9(a)に対応する視線の水平角[deg]と時間[s]との関係を示すものであり、水平角の加工ありの場合のグラフである。図12(a)は、図11を部分的に拡大したグラフである。つまり、図9(b)における水平角を上述のように加工したものである。図11中の囲った部分が加工した部分である。図12(b)は、このときのパワースペクトルと周波数[Hz]の関係を示すグラフである。この場合、0.2[Hz]〜1.5[Hz]間のパワーの極大値の和は144630である。
【0100】
このように安全確認を行っていた場合は、加工した視線の水平角のパワースペクトルを計算すると、安全確認で想定できる所定周波数範囲にパワーの極大値を持ち、極大値の和は所定値以上となる。したがって、安全確認がなされたと判定することができる。なお、反対に、安全確認で想定できる所定周波数範囲にパワーの極大値を持たないか、極大値を持っても所定値未満の場合は、安全確認がなされていないと判定する。安全確認がなされていないと判定された場合の加工した視線水平角は、左方向の視線水平角は所定値以上であるが右方向の視線水平角が所定角未満である、または右方向の視線水平角は所定値以上であるが左方向の視線水平角が所定角未満である等ある。
【0101】
従って、上述のように視線の水平角を加工することによって、ドライバがまず交差路を通行する他車を視認した場合、ドライバは安全確認したにもかかわらず、安全確認がなされていないと誤判定することを低減できることがわかる。
【0102】
ステップS22では、比較部13fは、スイッチ17cをオンすることによって、バッファ16a、16bに格納(一時的に記憶)されたデータ(水平角信号、センサデータ、車両前方画像データ)を記憶媒体14に記憶する(データ記憶手段)。そして、ステップS23では、バッファ16a、16bに格納(一時的に記憶)されたデータ(水平角信号、センサデータ、車両前方画像データ)を記憶媒体14に記憶すると、バッファ16a、16bをクリアする。
【0103】
このように、安全確認がなされていないと判定された場合に、水平角信号、センサデータ、車両前方画像データを記憶媒体14に記憶するのは、信号の無い交差点で安全確認がなされたとはいえない実際の視線挙動を、それが発生した交通環境・車両挙動・操作の情報とともにドライバDに提供するためである。また、信号の無い交差点で安全確認がなされたとはいえない視線挙動は、間違った思い込みまたは運転のくせがあるとみなすことができる。よって、換言すると、ドライバDの間違った思い込みや、ドライバDの運転のくせを直すための情報を、ドライバDに提供するためである。また、水平角信号、センサデータ、車両前方画像データを記憶媒体14に記憶することで、ドライバDの間違った思い込みやドライバの運転のくせを直すための情報を、ドライバDに提供することが可能となるので好ましい。
【0104】
つまり、本実施の形態における安全運転診断ECU10は、このように安全確認がなされたとはいえない実際の視線挙動を、それが発生した交通環境・車両挙動・操作の情報とともにドライバDに提供することによって、思い込みや運転のくせを直すことを目的の一つとするものである。
【0105】
この提供する情報は、極力実際の運転を再現したものが好ましい。また、実際の運転は、時間経過に伴う走行環境変化と変化に対応した操作の繰り返しとみなせる。そこで、具体的には、自車両Cが確認区間を走行している際の、車両前方画像(車両前方画像データによって表示される画像)に、水平角信号及びセンサデータを重畳させた画像を提供する。
【0106】
つまり、本実施の形態における安全運転診断ECU10は、運転診断画像の表示処理を実行する。まず、安全運転診断ECU10は、ナビゲーションシステム20からの信号に基づいて、自車両Cが自宅の駐車場や職場の駐車場等に位置(停車)するか否かを判定する(停車判定手段)。
【0107】
次に、自車両Cが自宅の駐車場や職場の駐車場等に位置(停車)すると判定した場合は、安全運転診断ECU10は、スイッチ17dをオンして記憶媒体14に記憶された運転診断画像を表示するためのデータ(車両前方画像データ、水平角信号及びセンサデータ)を画像生成部15に出力する。なお、位置(停車)していないと判定した場合は、この判定を繰り返す。なお、自宅の駐車場や職場の駐車場以外の駐車場に自車両Cを停車した時を採用してもよい。
【0108】
画像生成部15は、水平角信号、車両前方画像データ、及びセンサデータからディスプレイ80で表示可能な運転診断画像を生成して、生成した運転診断画像をディスプレイ80に表示する(表示手段)。この運転診断画像は、例えば、記憶媒体14に記憶された車両前方画像データが示す車両前方画像に、記憶媒体14に記憶された水平角信号及びセンサデータを重畳させた画像などを採用することができる。
【0109】
このように、車両前方画像に、水平角信号及びセンサデータを重畳させた画像(運転診断画像)をディスプレイ80に表示することによって、実際の運転に近い状況を再現することができるので好ましい。また、自宅の駐車場や職場の駐車場で自車両Cを停止させた時は、ドライバDは特に心理的に余裕があることが多い。よって、上述のように、自車両Cが自宅の駐車場や職場の駐車場等に位置(停車)しているときに、運転診断画像を提供することによって、心理的に余裕があるドライバに対して運転診断画像を提供することができるので好ましい。このように安全確認がなされてないと判定した時と、運転診断画像を提供する時は異なる。
【0110】
なお、自車両Cが自宅の駐車場や職場の駐車場等に位置(停車)すると判定してからスイッチ17dをオンする間に、安全運転診断ECU10は、記憶媒体14に運転診断画像を表示するためのデータ(車両前方画像データ、水平角信号及びセンサデータ)が存在するか(記憶されているか)否かを判定するようにしてもよい。そして、存在すると判定した場合にスイッチ17dをオンする。
【0111】
また、自車両Cが自宅の駐車場や職場の駐車場等に位置(停車)すると判定してからスイッチ17dをオンする間に、安全運転診断ECU10は、ドライバDに運転診断される意思があるか否かを判定するようにしてもよい。つまり、安全運転診断ECU10は、図示しないリモコンやタッチパネルなど指示装置からの信号に基づいて、運転診断画像の表示指示がなされたか否かを判定する(指示判定手段)。そして、指示装置からの表示指示を示す信号が入力された場合は運転診断される意思があるとみなして、スイッチ17dをオンする。なお、指示装置(図示省略)からの表示指示を示す信号が入力されない場合は運転診断される意思がないとみなして、自車両Cが停車したか否かの判定に戻る。
【0112】
しかしながら、運転診断画像を提供するのは自車両Cが自宅の駐車場や職場の駐車場等に位置(停車)している場合に限定されるものではない。安全運転診断ECU10(画像生成部15)は、自車両Cが自宅の駐車場や職場の駐車場等に位置(停車)していなくても、指示装置からの表示指示を示す信号が入力された場合に運転診断画像を生成して、生成した運転診断画像をディスプレイ80に表示する(表示手段)ようにしてもよい。
【0113】
また、本実施の形態においては、ドライバDに提供する情報として、車両前方画像に、水平角信号及びセンサデータを重畳させた画像(運転診断画像)を採用したが本発明はこれに限定されるものではない。例えば、より簡易な形態として、交差点通過時に安全確認でなかったことを知らせる音声メッセージを採用することもできる。ドライバDに提供する情報として、音声メッセージを採用した場合、画像を視認させることに比べて心理的負荷を低減することができる。したがって、音声メッセージは、運転中に提供してもドライバDに対する悪影響は少ない。つまり、音声メッセージの提供時期は、例えば、安全確認でないと判定した直後や、安全確認でないと判定した次に信号の無い交差点の数十[m]前の地点に位置したとき等を採用することができる。
【0114】
上述のように、本実施の形態の安全運転診断ECU10は、安全確認がなされたか否かの判定の信頼度が高い。よって、このように運転診断画像をディスプレイ80に表示することによって、ドライバDは、信頼度の高い診断結果(運転診断画像)を得ることができるので好ましい。
【符号の説明】
【0115】
10 安全運転診断ECU(安全運転診断装置)、11 距離判定部、12 進入距離判定部、13 安全確認判定部、13a サンプリング部、13b 加工部、13c パワースペクトル計算部、13d 周波数抽出部、13e 総和計算部、13f 比較部、14 記憶媒体、15 画像生成部、16a,16b バッファ、17a〜17d スイッチ、20 ナビゲーションシステム、30 視線センサ、40 車速センサ、50 アクセルペダル開度センサ、60 ストップランプスイッチ、70 ドライブレコーダ、80 ディスプレイ
【特許請求の範囲】
【請求項1】
車両が交差点に進入する際に、前記車両のドライバによる安全確認がなされたか否かを判定する安全運転診断装置であって、
前記車両の現在位置を取得する自車位置取得手段と、
直近の信号の無い交差点の進入位置を取得する進入位置取得手段と、
前記車両の運転席付近の固定点を原点とする直交座標系で検出されたドライバの視線の水平角を取得する水平角取得手段と、
前記車両が前記進入位置取得手段にて取得した進入位置から所定距離より長く進入した時点から過去所定時間にわたる前記水平角をサンプリングするサンプリング手段と、
前記過去所定時間前の前後における水平角の平均の絶対値が所定値以上である場合、前記過去所定時間前の水平角を0とし、当該過去所定時間の所定期間後の水平角が前記サンプリング手段にてサンプリングされた水平角となるように、前記サンプリング手段にてサンプリングされた水平角を加工する加工手段と、
前記絶対値が所定値以上である場合は前記加工手段にて加工された水平角からパワースペクトルを計算し、前記絶対値が所定値以上でない場合は前記サンプリング手段にてサンプリングされた水平角からパワースペクトルを計算するパワースペクトル計算手段と、
前記パワースペクトル計算手段にて算出したパワースペクトルにおいて、安全確認に必要な水平角の変化の周波数範囲におけるパワーの極大値の和が所定値に達してない場合はドライバによる安全確認がなされてないと判定し、所定値以上である場合はドライバによる安全確認がなされたと判定する安全確認判定手段と、
を備えることを特徴とする安全運転診断装置。
【請求項2】
前記サンプリング手段は、過去5秒間にわたる前記水平角をサンプリングすることを特徴とする請求項1に記載の安全運転診断装置。
【請求項3】
前記加工手段は、前記過去所定時間前から0.7秒間の水平角を加工することを特徴とする請求項1又は2に記載の安全運転診断装置。
【請求項4】
車両前方方向撮影用カメラを含むドライブレコーダから車両前方画像データをサンプリングする画像データサンプリング手段と、
車速センサ、アクセルペダル開度センサ、ストップランプスイッチを含む車載センサ群からセンサデータをサンプリングするセンサデータサンプリング手段と、
前記水平角取得手段にて取得した前記水平角、前記画像データサンプリング手段にてサンプリングした前記車両前方画像データ、及び前記センサデータサンプリング手段にてサンプリングした前記センサデータを一時的に記憶する一時記憶手段と、
前記安全確認判定手段にて安全確認がなされていないと判定した場合、前記一時記憶手段にて一時的に記憶した前記水平角、前記車両前方画像データ、及び前記センサデータをデータ記憶媒体に記憶するデータ記憶手段と、
を備えることを特徴とする請求項1乃至3のいずれか一項に記載の安全運転診断装置。
【請求項5】
画像の表示指示がなされたか否かを判定する指示判定手段と、前記指示判定手段にて画像の表示指示がなされたと判定されたことを条件として、前記データ記憶媒体に記憶された前記車両前方画像データが示す車両前方画像に、前記データ記憶媒体に記憶された前記水平角及び前記センサデータを重畳させた画像を表示装置に表示する表示手段とを備えることを特徴とする請求項4に記載の安全運転診断装置。
【請求項6】
前記車両が駐車場に停車したか否かを判定する停車判定手段を備え、前記表示手段は、前記指示判定手段にて画像の表示指示がなされたと判定されたことに加えて、前記停車判定手段にて前記車両が駐車場に停車したと判定されたことを条件として、前記画像を表示装置に表示することを特徴とする請求項5に記載の安全運転診断装置。
【請求項1】
車両が交差点に進入する際に、前記車両のドライバによる安全確認がなされたか否かを判定する安全運転診断装置であって、
前記車両の現在位置を取得する自車位置取得手段と、
直近の信号の無い交差点の進入位置を取得する進入位置取得手段と、
前記車両の運転席付近の固定点を原点とする直交座標系で検出されたドライバの視線の水平角を取得する水平角取得手段と、
前記車両が前記進入位置取得手段にて取得した進入位置から所定距離より長く進入した時点から過去所定時間にわたる前記水平角をサンプリングするサンプリング手段と、
前記過去所定時間前の前後における水平角の平均の絶対値が所定値以上である場合、前記過去所定時間前の水平角を0とし、当該過去所定時間の所定期間後の水平角が前記サンプリング手段にてサンプリングされた水平角となるように、前記サンプリング手段にてサンプリングされた水平角を加工する加工手段と、
前記絶対値が所定値以上である場合は前記加工手段にて加工された水平角からパワースペクトルを計算し、前記絶対値が所定値以上でない場合は前記サンプリング手段にてサンプリングされた水平角からパワースペクトルを計算するパワースペクトル計算手段と、
前記パワースペクトル計算手段にて算出したパワースペクトルにおいて、安全確認に必要な水平角の変化の周波数範囲におけるパワーの極大値の和が所定値に達してない場合はドライバによる安全確認がなされてないと判定し、所定値以上である場合はドライバによる安全確認がなされたと判定する安全確認判定手段と、
を備えることを特徴とする安全運転診断装置。
【請求項2】
前記サンプリング手段は、過去5秒間にわたる前記水平角をサンプリングすることを特徴とする請求項1に記載の安全運転診断装置。
【請求項3】
前記加工手段は、前記過去所定時間前から0.7秒間の水平角を加工することを特徴とする請求項1又は2に記載の安全運転診断装置。
【請求項4】
車両前方方向撮影用カメラを含むドライブレコーダから車両前方画像データをサンプリングする画像データサンプリング手段と、
車速センサ、アクセルペダル開度センサ、ストップランプスイッチを含む車載センサ群からセンサデータをサンプリングするセンサデータサンプリング手段と、
前記水平角取得手段にて取得した前記水平角、前記画像データサンプリング手段にてサンプリングした前記車両前方画像データ、及び前記センサデータサンプリング手段にてサンプリングした前記センサデータを一時的に記憶する一時記憶手段と、
前記安全確認判定手段にて安全確認がなされていないと判定した場合、前記一時記憶手段にて一時的に記憶した前記水平角、前記車両前方画像データ、及び前記センサデータをデータ記憶媒体に記憶するデータ記憶手段と、
を備えることを特徴とする請求項1乃至3のいずれか一項に記載の安全運転診断装置。
【請求項5】
画像の表示指示がなされたか否かを判定する指示判定手段と、前記指示判定手段にて画像の表示指示がなされたと判定されたことを条件として、前記データ記憶媒体に記憶された前記車両前方画像データが示す車両前方画像に、前記データ記憶媒体に記憶された前記水平角及び前記センサデータを重畳させた画像を表示装置に表示する表示手段とを備えることを特徴とする請求項4に記載の安全運転診断装置。
【請求項6】
前記車両が駐車場に停車したか否かを判定する停車判定手段を備え、前記表示手段は、前記指示判定手段にて画像の表示指示がなされたと判定されたことに加えて、前記停車判定手段にて前記車両が駐車場に停車したと判定されたことを条件として、前記画像を表示装置に表示することを特徴とする請求項5に記載の安全運転診断装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2011−123618(P2011−123618A)
【公開日】平成23年6月23日(2011.6.23)
【国際特許分類】
【出願番号】特願2009−279771(P2009−279771)
【出願日】平成21年12月9日(2009.12.9)
【出願人】(000004260)株式会社デンソー (27,639)
【出願人】(304027349)国立大学法人豊橋技術科学大学 (391)
【Fターム(参考)】
【公開日】平成23年6月23日(2011.6.23)
【国際特許分類】
【出願日】平成21年12月9日(2009.12.9)
【出願人】(000004260)株式会社デンソー (27,639)
【出願人】(304027349)国立大学法人豊橋技術科学大学 (391)
【Fターム(参考)】
[ Back to top ]