
安定化要素の機械的な安全性を検査する方法ならびに安定化要素の機械的な安全性を検査する方法を実施する走査装置
【課題】安定化要素の機械的な安定性を検査する方法であって、安定化要素は、組付状態で、タービン、特に蒸気タービンの動翼のブレードを周方向に相互に機械式に連結し、隣接する安定化要素は、それぞれ係合域で、相互に入り込んで係合しているものを改良して、公知の欠点を解消し、迅速に行い、再現可能で確実な結果が得られるものを提供する。
【解決手段】係合域14に存在する安定化要素12;12a,12bの材料部分における亀裂の存在を外側から超音波を用いて自動で走査する。
【解決手段】係合域14に存在する安定化要素12;12a,12bの材料部分における亀裂の存在を外側から超音波を用いて自動で走査する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、タービン分野においてトラブルなく材料検査する技術分野に係る。
【0002】
本発明は、安定化要素の機械的な安定性を検査する方法ならびに安定化要素の機械的な安定性を検査する方法を実施する走査装置に関する。
【背景技術】
【0003】
蒸気タービンは、とりわけ低圧部分で、極めて長い動翼を備えており、動翼は、適切な措置を講じないと、運転中に所望しない振動が生じやすい。たとえばドイツ連邦共和国特許出願公開第102008059836号明細書において開示されているように、適切な措置として、翼先端部付近で動翼のブレードの間に機械式の連結部材を設けることが公知である。
【0004】
また、米国特許第4257743号明細書において記載されているように、ブレードの中央部分に特別な安定化要素による連結部材を設けることも公知である。
【0005】
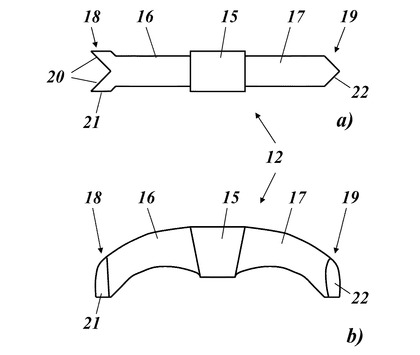
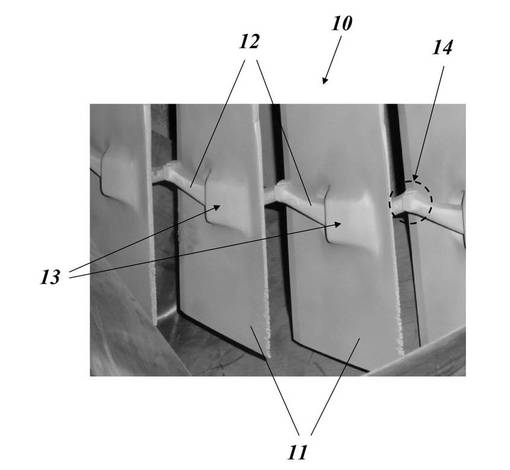
図1には、該当する連結部材を断面図で示す。蒸気タービン10の動翼11は、それぞれ貫通開口13を備えており、貫通開口13を通って、アーチ形の安定化要素12が延びていて、硬ろうでろう接されている。安定化要素12の形状は、図2において平面図(図2a)および側面図(図2b)で示す。
【0006】
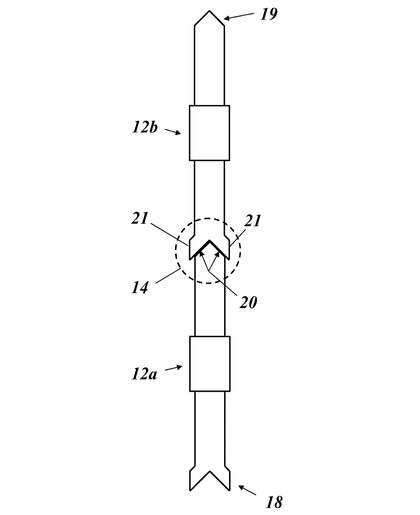
図1および図2に示す安定化要素12は、その全てが同形に構成されている。安定化要素12は、それぞれ2つの端部18,19を備えており、第1の端部18は、V字形の溝(比喩的に照門ともいう)として、2つの溝壁20を備えて形成されており、これに対して第2の端部19は、溝壁20に適合するV字形の楔として、楔壁22(比喩的に照星ともいう)を備えて形成されている。端部18,19の間で中央に、厚みを増した中央部材15が配置されており、中央部材15から、アーム16,17が端部18,19に向かって延びている。周方向にみて相前後して配置された安定化要素12は、図3に例示するように、それぞれ第2の端部19で、隣接する安定化要素の第1の端部18に係合する。このようにして相並んで位置する2つの安定化要素12a,12bの間に係合域14が形成され、係合域14は、図3において破線の円で表記する。係合域14は、それぞれ反対側の外側で、平らな2つの外面21により画定されている。ブレードが捻れて形成されているので、照星は、常に片側で照門に接触する(組付側)。運転中に、ブレードに捻れが解消されるような作用が及ぼされると、照星は、別の片側で、照門に接触する(運転側)。
【0007】
係合域14において安定化要素12もしくは12a,12bが組み付けられた状態では、運転中に亀裂が発生する恐れがある、ということが判った。亀裂は、特に照門側で発生し、つまり第1の端部18の溝壁20に発生し、したがって発生当初は外側から視認されない。
【0008】
通常、係合域14の亀裂検査は、公知のMPI法(Magnetic Particle Inspection;磁粉探傷検査)で行うことができる。この方法の欠点によれば、亀裂が外側に現れるとはじめて発見することができ、たいていの場合、破損した要素を適時交換するには、これでは遅すぎる(大きな損傷を伴う)。
【0009】
さらに係合域14を手動で超音波により検査することも考えられる。そのような手動の検査は、発生した亀裂を早期に発見することができるが、動翼11の間の狭いスペース条件に基づいて、困難であり、時間が掛かり、確実なものではない。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】ドイツ連邦共和国特許出願公開第102008059836号明細書
【特許文献2】米国特許第4257743号明細書
【発明の概要】
【発明が解決しようとする課題】
【0011】
したがって本発明の課題は、冒頭で述べたような、安定化要素の機械的な安全性を検査する方法を改良して、公知の欠点を解消し、迅速に行い、再現可能で確実な結果が得られるものを提供すること、ならびに、このような方法を実施する走査装置を提供することである。
【課題を解決するための手段】
【0012】
この課題を解決するために本発明の方法では、安定化要素の機械的な安定性を検査する方法であって、安定化要素は、組付状態で、タービン、特に蒸気タービンの動翼のブレードを周方向に相互に機械式に連結し、隣接する安定化要素は、それぞれ係合域で、相互に入り込んで係合しているものにおいて、係合域に存在する安定化要素の材料部分における亀裂の存在を外側から超音波を用いて自動で走査する。
【0013】
本発明による方法の別の1つの態様によれば、安定化要素は、係合域において、外側で、平らな外面により画定されており、外面に沿って走査を行う。
【0014】
本発明による方法の別の1つの態様によれば、走査を半径方向に行う。
【0015】
本発明による方法の別の1つの態様によれば、走査するために、単数または複数の超音波ビームを、斜めの入射角度で、係合域もしくは外面に入力結合する。
【0016】
本発明による方法の別の1つの態様によれば、走査を、同時に係合域の反対側で行う。
【0017】
本発明による方法の別の1つの態様によれば、継続的に走査箇所を求め、走査箇所と走査結果とを相互に対応付けして、対応を保存する。
【0018】
この課題を解決するために本発明の走査装置では、安定化要素の機械的な安定性を検査する方法を実施する走査装置において、超音波走査のための少なくとも1つのセンサを備えており、係合域で安定化要素に走査装置を固定するための第1の手段を備えており、係合域に沿って少なくとも1つのセンサを自動走行するため第2の手段を備えている。
【0019】
本発明による走査装置の別の1つの態様によれば、少なくとも1つのセンサは、1チャンネルの超音波センサである。
【0020】
本発明による走査装置の別の1つの態様によれば、少なくとも1つのセンサは、フェイズドアレイ信号変換器である。
【0021】
本発明による走査装置の別の1つの態様によれば、安定化要素の外面に適合させるために、少なくとも1つのセンサは、走査装置に枢着式に支承されている。これにより平らな外面にセンサを自動で確実に当て付けることができる。
【0022】
本発明による操作装置の別の1つの態様によれば、それぞれ反対側で係合域を同時に走査するためにそれぞれ反対側に位置する2つのセンサが設けられている。これにより検査を大幅に短縮することができる。
【0023】
本発明による操作装置の別の1つの態様によれば、各センサは、2つまたは3つ以上の信号変換器を備えており、信号変換器は、様々な角度で超音波ビームを送出する。これにより発生しやすい潜在的な亀裂の正確な特定が達成される。
【0024】
その際、特に超音波ビームは、センサの設置面に対して傾斜している。
【0025】
本発明による操作装置の別の1つの態様によれば、第2の手段は、好適にはモータ式に駆動される走行機構を備えている。
【0026】
本発明による操作装置の別の1つの態様によれば、走査装置に、走査工程中に少なくとも1つのセンサの位置を継続して特定するための手段が設けられている。これにより結果を簡単にグラフ表示することができる。
【0027】
本発明による操作装置の別の1つの態様によれば、第1の手段は、安定化要素に走査装置を着脱可能に、好適にはセルフセンタリング式に固定するためのクランプを備えている。
【0028】
本発明による操作装置の別の1つの態様によれば、第1の手段は、保持磁石を備えている。
【図面の簡単な説明】
【0029】
【図1】蒸気タービンの複数の動翼の一部を示す図であり、動翼のブレードは安定化要素を介して機械式に相互に連結されている。
【図2】図1に示す個々の安定化要素の配置構成を、aは平面図で示し、bは側面図で示す。
【図3】図2に示す2つの安定化要素を相互に係合して係合域を形成した状態で示す平面図である。
【図4】安定化要素にセットされた、本発明による係合域を走査する走査装置の1つの実施の形態を示す側面図である。
【図5】図4に示す走査装置の運転に関して例示するブロック図である。
【図6】相互に傾斜し、かつ設置面に対して傾斜する2本の超音波ビームを形成する、図4に示す走査装置に使用されるセンサを示す斜視図である。
【発明を実施するための形態】
【0030】
以下に、図面に基づいて、本発明の実施の形態を詳説する。
【0031】
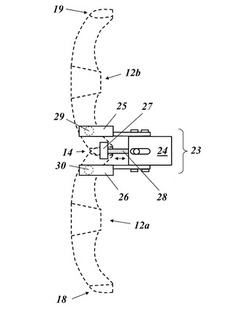
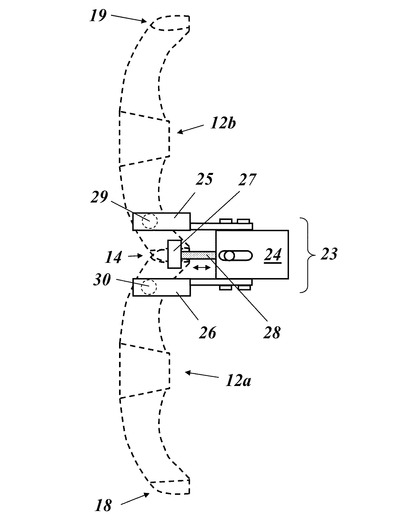
図4には、本発明を実施するための1つの形態による、破線で示す安定化要素12a,12bにセットされた、係合域14を走査する走査装置23を側面図で示す。走査装置23は、ハウジング24を備えており、ハウジング24内に、走行機構28が設けられ、ガイドされており、走行機構28により、走行機構28の前端に取り付けられた超音波検査用のセンサ27が、タービン軸に関して半径方向に制御可能で往復運動可能である。走行機構28がたとえば電動モータにより駆動される場合、電動モータは、ハウジング24の内側に取り付けられている。図4にはケーブルを示していない。ケーブルは、ハウジング24から出発している。ケーブルには、給電線路ならびに信号線路が含まれる。
【0032】
走査装置23のハウジング24に、互いに反対側にU字形のクランプ25,26が取り付けられており、クランプ25,26により、走査装置23は、係合域14の両側で挟持して、係合域14で重畳する安定化要素12a,12bの隣接するアーム16,17に沿って摺動し、固定することができる。付加的に固定するために、クランプ25,26付近に保持磁石29,30を設けることができ、保持磁石29,30は、クランプ25,26の挟持力を補足する。
【0033】
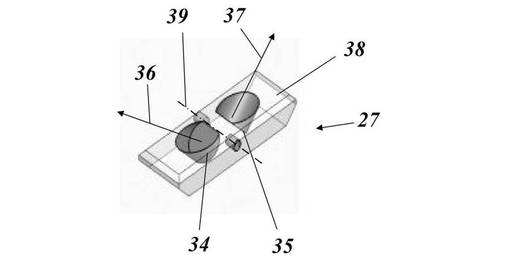
センサ27から送信されて、再び受信される超音波は、係合域14の平らな外面21を介して入力結合もしくは出力結合される。入力結合および出力結合を最適に行うために、センサ27は、設置面(図6の38)で、できるだけ全面的に外面21に当て付ける必要がある。全面的な当て付けを容易にするために、センサ27は、走行機構28の端部に、好適には枢着式に、たとえばカルダン式または軸線(図6の39)を中心に旋回可能に取り付けられている。
【0034】
走査過程を短縮するために、各外面21に対応するセンサ27を設けてもよい。したがって超音波による走査は、同時にそれぞれ反対側つまり両側で行われる。図6に示すように、各センサ27は、2つまたは3つ以上の信号変換器34,35を備えてよく、信号変換器34,35は、パルスエコー原理に従って作動し、様々な角度で超音波ビーム36,37を送出する。その際、特に超音波ビーム36,37は、センサ27の設置面38に対して傾斜してよい。センサ27は、フェイズドアレイ信号変換器であってもよく、その超音波ビームは、位相関係の変化により変向することができる。
【0035】
走査装置が位置決めセンサを備えていると特に好適であり、位置決めセンサは、走査過程に際して単数または複数のセンサ27の位置を継続的に記録するので、各センサ位置に、対応する走査結果を対応付けすることができ、評価に際して走査結果の2次元的な表示が可能である。
【0036】
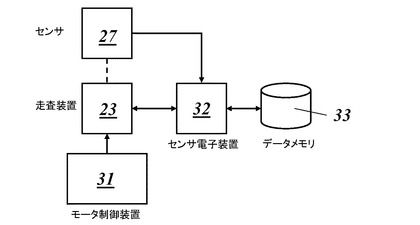
走査過程を制御するには、図5に示すブロック回路が適している。同時にモータ駆動装置の給電装置を含むモータ制御装置31は、ケーブルを介して、走査装置23と接続されている。制御装置31は、走行機構28の運動ひいてはセンサ27の走査経路を制御する。外部のセンサ電子装置32は、センサ27と接続されていて、センサ27から、適切な走査信号を受け取る。
【0037】
さらにセンサ電子装置32は、走査装置23から、求められたセンサ27の位置値を受け取る。両方の値は、相互に関係付けて、データメモリ33に格納し、結果を画像表示するかまたは別の結果と比較するために呼び出すことができる。
【符号の説明】
【0038】
10 タービン(蒸気タービン)、 11 動翼、 12;12a,12b 安定化要素(アーチ)、 13 貫通開口、 14 係合域、 15 中央部材、 16,17 アーム、 18,19 端部(溝形、楔形)、 20 溝壁、 21 外面、 22 楔壁、 23 走査装置(スキャナ)、 24 ハウジング、 25,26 保持手段(たとえばクランプ)、 27 センサ、 28 走行機構、 29,30 保持磁石、 31 モータ制御装置、 32 センサ電子装置、 33 データメモリ、 34,35 信号変換器、 36,37 超音波ビーム、 38 設置面、 39 軸線
【技術分野】
【0001】
本発明は、タービン分野においてトラブルなく材料検査する技術分野に係る。
【0002】
本発明は、安定化要素の機械的な安定性を検査する方法ならびに安定化要素の機械的な安定性を検査する方法を実施する走査装置に関する。
【背景技術】
【0003】
蒸気タービンは、とりわけ低圧部分で、極めて長い動翼を備えており、動翼は、適切な措置を講じないと、運転中に所望しない振動が生じやすい。たとえばドイツ連邦共和国特許出願公開第102008059836号明細書において開示されているように、適切な措置として、翼先端部付近で動翼のブレードの間に機械式の連結部材を設けることが公知である。
【0004】
また、米国特許第4257743号明細書において記載されているように、ブレードの中央部分に特別な安定化要素による連結部材を設けることも公知である。
【0005】
図1には、該当する連結部材を断面図で示す。蒸気タービン10の動翼11は、それぞれ貫通開口13を備えており、貫通開口13を通って、アーチ形の安定化要素12が延びていて、硬ろうでろう接されている。安定化要素12の形状は、図2において平面図(図2a)および側面図(図2b)で示す。
【0006】
図1および図2に示す安定化要素12は、その全てが同形に構成されている。安定化要素12は、それぞれ2つの端部18,19を備えており、第1の端部18は、V字形の溝(比喩的に照門ともいう)として、2つの溝壁20を備えて形成されており、これに対して第2の端部19は、溝壁20に適合するV字形の楔として、楔壁22(比喩的に照星ともいう)を備えて形成されている。端部18,19の間で中央に、厚みを増した中央部材15が配置されており、中央部材15から、アーム16,17が端部18,19に向かって延びている。周方向にみて相前後して配置された安定化要素12は、図3に例示するように、それぞれ第2の端部19で、隣接する安定化要素の第1の端部18に係合する。このようにして相並んで位置する2つの安定化要素12a,12bの間に係合域14が形成され、係合域14は、図3において破線の円で表記する。係合域14は、それぞれ反対側の外側で、平らな2つの外面21により画定されている。ブレードが捻れて形成されているので、照星は、常に片側で照門に接触する(組付側)。運転中に、ブレードに捻れが解消されるような作用が及ぼされると、照星は、別の片側で、照門に接触する(運転側)。
【0007】
係合域14において安定化要素12もしくは12a,12bが組み付けられた状態では、運転中に亀裂が発生する恐れがある、ということが判った。亀裂は、特に照門側で発生し、つまり第1の端部18の溝壁20に発生し、したがって発生当初は外側から視認されない。
【0008】
通常、係合域14の亀裂検査は、公知のMPI法(Magnetic Particle Inspection;磁粉探傷検査)で行うことができる。この方法の欠点によれば、亀裂が外側に現れるとはじめて発見することができ、たいていの場合、破損した要素を適時交換するには、これでは遅すぎる(大きな損傷を伴う)。
【0009】
さらに係合域14を手動で超音波により検査することも考えられる。そのような手動の検査は、発生した亀裂を早期に発見することができるが、動翼11の間の狭いスペース条件に基づいて、困難であり、時間が掛かり、確実なものではない。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】ドイツ連邦共和国特許出願公開第102008059836号明細書
【特許文献2】米国特許第4257743号明細書
【発明の概要】
【発明が解決しようとする課題】
【0011】
したがって本発明の課題は、冒頭で述べたような、安定化要素の機械的な安全性を検査する方法を改良して、公知の欠点を解消し、迅速に行い、再現可能で確実な結果が得られるものを提供すること、ならびに、このような方法を実施する走査装置を提供することである。
【課題を解決するための手段】
【0012】
この課題を解決するために本発明の方法では、安定化要素の機械的な安定性を検査する方法であって、安定化要素は、組付状態で、タービン、特に蒸気タービンの動翼のブレードを周方向に相互に機械式に連結し、隣接する安定化要素は、それぞれ係合域で、相互に入り込んで係合しているものにおいて、係合域に存在する安定化要素の材料部分における亀裂の存在を外側から超音波を用いて自動で走査する。
【0013】
本発明による方法の別の1つの態様によれば、安定化要素は、係合域において、外側で、平らな外面により画定されており、外面に沿って走査を行う。
【0014】
本発明による方法の別の1つの態様によれば、走査を半径方向に行う。
【0015】
本発明による方法の別の1つの態様によれば、走査するために、単数または複数の超音波ビームを、斜めの入射角度で、係合域もしくは外面に入力結合する。
【0016】
本発明による方法の別の1つの態様によれば、走査を、同時に係合域の反対側で行う。
【0017】
本発明による方法の別の1つの態様によれば、継続的に走査箇所を求め、走査箇所と走査結果とを相互に対応付けして、対応を保存する。
【0018】
この課題を解決するために本発明の走査装置では、安定化要素の機械的な安定性を検査する方法を実施する走査装置において、超音波走査のための少なくとも1つのセンサを備えており、係合域で安定化要素に走査装置を固定するための第1の手段を備えており、係合域に沿って少なくとも1つのセンサを自動走行するため第2の手段を備えている。
【0019】
本発明による走査装置の別の1つの態様によれば、少なくとも1つのセンサは、1チャンネルの超音波センサである。
【0020】
本発明による走査装置の別の1つの態様によれば、少なくとも1つのセンサは、フェイズドアレイ信号変換器である。
【0021】
本発明による走査装置の別の1つの態様によれば、安定化要素の外面に適合させるために、少なくとも1つのセンサは、走査装置に枢着式に支承されている。これにより平らな外面にセンサを自動で確実に当て付けることができる。
【0022】
本発明による操作装置の別の1つの態様によれば、それぞれ反対側で係合域を同時に走査するためにそれぞれ反対側に位置する2つのセンサが設けられている。これにより検査を大幅に短縮することができる。
【0023】
本発明による操作装置の別の1つの態様によれば、各センサは、2つまたは3つ以上の信号変換器を備えており、信号変換器は、様々な角度で超音波ビームを送出する。これにより発生しやすい潜在的な亀裂の正確な特定が達成される。
【0024】
その際、特に超音波ビームは、センサの設置面に対して傾斜している。
【0025】
本発明による操作装置の別の1つの態様によれば、第2の手段は、好適にはモータ式に駆動される走行機構を備えている。
【0026】
本発明による操作装置の別の1つの態様によれば、走査装置に、走査工程中に少なくとも1つのセンサの位置を継続して特定するための手段が設けられている。これにより結果を簡単にグラフ表示することができる。
【0027】
本発明による操作装置の別の1つの態様によれば、第1の手段は、安定化要素に走査装置を着脱可能に、好適にはセルフセンタリング式に固定するためのクランプを備えている。
【0028】
本発明による操作装置の別の1つの態様によれば、第1の手段は、保持磁石を備えている。
【図面の簡単な説明】
【0029】
【図1】蒸気タービンの複数の動翼の一部を示す図であり、動翼のブレードは安定化要素を介して機械式に相互に連結されている。
【図2】図1に示す個々の安定化要素の配置構成を、aは平面図で示し、bは側面図で示す。
【図3】図2に示す2つの安定化要素を相互に係合して係合域を形成した状態で示す平面図である。
【図4】安定化要素にセットされた、本発明による係合域を走査する走査装置の1つの実施の形態を示す側面図である。
【図5】図4に示す走査装置の運転に関して例示するブロック図である。
【図6】相互に傾斜し、かつ設置面に対して傾斜する2本の超音波ビームを形成する、図4に示す走査装置に使用されるセンサを示す斜視図である。
【発明を実施するための形態】
【0030】
以下に、図面に基づいて、本発明の実施の形態を詳説する。
【0031】
図4には、本発明を実施するための1つの形態による、破線で示す安定化要素12a,12bにセットされた、係合域14を走査する走査装置23を側面図で示す。走査装置23は、ハウジング24を備えており、ハウジング24内に、走行機構28が設けられ、ガイドされており、走行機構28により、走行機構28の前端に取り付けられた超音波検査用のセンサ27が、タービン軸に関して半径方向に制御可能で往復運動可能である。走行機構28がたとえば電動モータにより駆動される場合、電動モータは、ハウジング24の内側に取り付けられている。図4にはケーブルを示していない。ケーブルは、ハウジング24から出発している。ケーブルには、給電線路ならびに信号線路が含まれる。
【0032】
走査装置23のハウジング24に、互いに反対側にU字形のクランプ25,26が取り付けられており、クランプ25,26により、走査装置23は、係合域14の両側で挟持して、係合域14で重畳する安定化要素12a,12bの隣接するアーム16,17に沿って摺動し、固定することができる。付加的に固定するために、クランプ25,26付近に保持磁石29,30を設けることができ、保持磁石29,30は、クランプ25,26の挟持力を補足する。
【0033】
センサ27から送信されて、再び受信される超音波は、係合域14の平らな外面21を介して入力結合もしくは出力結合される。入力結合および出力結合を最適に行うために、センサ27は、設置面(図6の38)で、できるだけ全面的に外面21に当て付ける必要がある。全面的な当て付けを容易にするために、センサ27は、走行機構28の端部に、好適には枢着式に、たとえばカルダン式または軸線(図6の39)を中心に旋回可能に取り付けられている。
【0034】
走査過程を短縮するために、各外面21に対応するセンサ27を設けてもよい。したがって超音波による走査は、同時にそれぞれ反対側つまり両側で行われる。図6に示すように、各センサ27は、2つまたは3つ以上の信号変換器34,35を備えてよく、信号変換器34,35は、パルスエコー原理に従って作動し、様々な角度で超音波ビーム36,37を送出する。その際、特に超音波ビーム36,37は、センサ27の設置面38に対して傾斜してよい。センサ27は、フェイズドアレイ信号変換器であってもよく、その超音波ビームは、位相関係の変化により変向することができる。
【0035】
走査装置が位置決めセンサを備えていると特に好適であり、位置決めセンサは、走査過程に際して単数または複数のセンサ27の位置を継続的に記録するので、各センサ位置に、対応する走査結果を対応付けすることができ、評価に際して走査結果の2次元的な表示が可能である。
【0036】
走査過程を制御するには、図5に示すブロック回路が適している。同時にモータ駆動装置の給電装置を含むモータ制御装置31は、ケーブルを介して、走査装置23と接続されている。制御装置31は、走行機構28の運動ひいてはセンサ27の走査経路を制御する。外部のセンサ電子装置32は、センサ27と接続されていて、センサ27から、適切な走査信号を受け取る。
【0037】
さらにセンサ電子装置32は、走査装置23から、求められたセンサ27の位置値を受け取る。両方の値は、相互に関係付けて、データメモリ33に格納し、結果を画像表示するかまたは別の結果と比較するために呼び出すことができる。
【符号の説明】
【0038】
10 タービン(蒸気タービン)、 11 動翼、 12;12a,12b 安定化要素(アーチ)、 13 貫通開口、 14 係合域、 15 中央部材、 16,17 アーム、 18,19 端部(溝形、楔形)、 20 溝壁、 21 外面、 22 楔壁、 23 走査装置(スキャナ)、 24 ハウジング、 25,26 保持手段(たとえばクランプ)、 27 センサ、 28 走行機構、 29,30 保持磁石、 31 モータ制御装置、 32 センサ電子装置、 33 データメモリ、 34,35 信号変換器、 36,37 超音波ビーム、 38 設置面、 39 軸線
【特許請求の範囲】
【請求項1】
安定化要素(12;12a,12b)の機械的な安定性を検査する方法であって、
安定化要素(12;12a,12b)は、組付状態で、タービン(10)、特に蒸気タービンの動翼のブレードを周方向に相互に機械式に連結し、隣接する安定化要素(12;12a,12b)は、それぞれ係合域(14)で、相互に入り込んで係合しているものにおいて、
係合域(14)に存在する安定化要素(12;12a,12b)の材料部分における亀裂の存在を外側から超音波を用いて自動で走査することを特徴とする、安定化要素の機械的な安定性を検査する方法。
【請求項2】
安定化要素(12a,12b)は、係合域(14)において、外側で、平らな外面(21)により画定されており、外面(21)に沿って走査を行う、請求項1記載の方法。
【請求項3】
走査を半径方向に行う、請求項2記載の方法。
【請求項4】
走査するために、単数または複数の超音波ビーム(36,37)を、斜めの入射角度で、係合域(14)もしくは外面(21)に入力結合する、請求項1から3までのいずれか1項記載の方法。
【請求項5】
走査を、同時に係合域(14)の両側で行う、請求項1から4までのいずれか1項記載の方法。
【請求項6】
継続的に走査箇所を求め、走査箇所に走査結果を対応付けして、対応関係を保存する、請求項1から5までのいずれか1項記載の方法。
【請求項7】
請求項1から6までのいずれか1項記載の安定化要素の機械的な安定性を検査する方法を実施する走査装置(23)において、
超音波走査のための少なくとも1つのセンサ(27)を備えており、係合域(14)で安定化要素(12a,12b)に走査装置(23)を固定するための第1の手段(25,26)を備えており、係合域(14)に沿って少なくとも1つのセンサ(27)を自動走行するため第2の手段(28)を備えていることを特徴とする、安定化要素の機械的な安定性を検査する方法を実施する走査装置。
【請求項8】
少なくとも1つのセンサ(27)は、1チャンネルの超音波センサである、請求項7記載の装置。
【請求項9】
少なくとも1つのセンサ(27)は、フェイズドアレイ信号変換器である、請求項7記載の走査装置。
【請求項10】
安定化要素(12;12a,12b)の外面(21)に適合させるために、少なくとも1つのセンサ(27)は、走査装置(23)に枢着式に支承されている、請求項7から9までのいずれか1項記載の走査装置。
【請求項11】
両側で係合域(14)を同時に走査するためにそれぞれ反対側に位置する2つのセンサ(27)が設けられている、請求項7から10までのいずれか1項記載の走査装置。
【請求項12】
各センサ(27)は、2つまたは3つ以上の信号変換器(34,35)を備えており、信号変換器(34,35)は、様々な角度で超音波ビーム(36,37)を送出する、請求項7から11までのいずれか1項記載の走査装置。
【請求項13】
超音波ビーム(36,37)は、センサ(27)の設置面(38)に対して傾斜している、請求項12記載の走査装置。
【請求項14】
第2の手段は、好適にはモータ式に駆動される走行機構(28)を備えている、請求項7から13までのいずれか1項記載の走査装置。
【請求項15】
走査装置(23)に、走査工程中に少なくとも1つのセンサ(27)の位置を継続して特定するための手段が設けられている、請求項7から14までのいずれか1項記載の走査装置。
【請求項16】
第1の手段は、安定化要素(12;12a,12b)に走査装置(23)を着脱可能に、好適にはセルフセンタリング式に固定するためのクランプ(25,26)を備えている、請求項7から15までのいずれか1項記載の走査装置。
【請求項17】
第1の手段は、保持磁石(29,30)を備えている、請求項7から16までのいずれか1項記載の走査装置。
【請求項1】
安定化要素(12;12a,12b)の機械的な安定性を検査する方法であって、
安定化要素(12;12a,12b)は、組付状態で、タービン(10)、特に蒸気タービンの動翼のブレードを周方向に相互に機械式に連結し、隣接する安定化要素(12;12a,12b)は、それぞれ係合域(14)で、相互に入り込んで係合しているものにおいて、
係合域(14)に存在する安定化要素(12;12a,12b)の材料部分における亀裂の存在を外側から超音波を用いて自動で走査することを特徴とする、安定化要素の機械的な安定性を検査する方法。
【請求項2】
安定化要素(12a,12b)は、係合域(14)において、外側で、平らな外面(21)により画定されており、外面(21)に沿って走査を行う、請求項1記載の方法。
【請求項3】
走査を半径方向に行う、請求項2記載の方法。
【請求項4】
走査するために、単数または複数の超音波ビーム(36,37)を、斜めの入射角度で、係合域(14)もしくは外面(21)に入力結合する、請求項1から3までのいずれか1項記載の方法。
【請求項5】
走査を、同時に係合域(14)の両側で行う、請求項1から4までのいずれか1項記載の方法。
【請求項6】
継続的に走査箇所を求め、走査箇所に走査結果を対応付けして、対応関係を保存する、請求項1から5までのいずれか1項記載の方法。
【請求項7】
請求項1から6までのいずれか1項記載の安定化要素の機械的な安定性を検査する方法を実施する走査装置(23)において、
超音波走査のための少なくとも1つのセンサ(27)を備えており、係合域(14)で安定化要素(12a,12b)に走査装置(23)を固定するための第1の手段(25,26)を備えており、係合域(14)に沿って少なくとも1つのセンサ(27)を自動走行するため第2の手段(28)を備えていることを特徴とする、安定化要素の機械的な安定性を検査する方法を実施する走査装置。
【請求項8】
少なくとも1つのセンサ(27)は、1チャンネルの超音波センサである、請求項7記載の装置。
【請求項9】
少なくとも1つのセンサ(27)は、フェイズドアレイ信号変換器である、請求項7記載の走査装置。
【請求項10】
安定化要素(12;12a,12b)の外面(21)に適合させるために、少なくとも1つのセンサ(27)は、走査装置(23)に枢着式に支承されている、請求項7から9までのいずれか1項記載の走査装置。
【請求項11】
両側で係合域(14)を同時に走査するためにそれぞれ反対側に位置する2つのセンサ(27)が設けられている、請求項7から10までのいずれか1項記載の走査装置。
【請求項12】
各センサ(27)は、2つまたは3つ以上の信号変換器(34,35)を備えており、信号変換器(34,35)は、様々な角度で超音波ビーム(36,37)を送出する、請求項7から11までのいずれか1項記載の走査装置。
【請求項13】
超音波ビーム(36,37)は、センサ(27)の設置面(38)に対して傾斜している、請求項12記載の走査装置。
【請求項14】
第2の手段は、好適にはモータ式に駆動される走行機構(28)を備えている、請求項7から13までのいずれか1項記載の走査装置。
【請求項15】
走査装置(23)に、走査工程中に少なくとも1つのセンサ(27)の位置を継続して特定するための手段が設けられている、請求項7から14までのいずれか1項記載の走査装置。
【請求項16】
第1の手段は、安定化要素(12;12a,12b)に走査装置(23)を着脱可能に、好適にはセルフセンタリング式に固定するためのクランプ(25,26)を備えている、請求項7から15までのいずれか1項記載の走査装置。
【請求項17】
第1の手段は、保持磁石(29,30)を備えている、請求項7から16までのいずれか1項記載の走査装置。
【図2】


【図3】
【図4】
【図5】
【図1】
【図6】
【図3】
【図4】
【図5】
【図1】
【図6】
【公開番号】特開2012−37518(P2012−37518A)
【公開日】平成24年2月23日(2012.2.23)
【国際特許分類】
【出願番号】特願2011−170362(P2011−170362)
【出願日】平成23年8月3日(2011.8.3)
【出願人】(503416353)アルストム テクノロジー リミテッド (394)
【氏名又は名称原語表記】ALSTOM Technology Ltd
【住所又は居所原語表記】Brown Boveri Strasse 7, CH−5401 Baden, Switzerland
【Fターム(参考)】
【公開日】平成24年2月23日(2012.2.23)
【国際特許分類】
【出願日】平成23年8月3日(2011.8.3)
【出願人】(503416353)アルストム テクノロジー リミテッド (394)
【氏名又は名称原語表記】ALSTOM Technology Ltd
【住所又は居所原語表記】Brown Boveri Strasse 7, CH−5401 Baden, Switzerland
【Fターム(参考)】
[ Back to top ]