
定位駆動システム
細長い部材の運動を制御するための駆動システムは、第1の回転ノブおよび第2の回転ノブを有する基部ユニットと、ガイドレールに摺動可能に連結される従動子を含む従動子アセンブリと、長手方向運動ワイヤと、回転運動ワイヤとを含む。従動子は、長手方向運動滑車と、回転運動滑車と、細長い部材がそれに取付可能であるように、細長い部材を受容するように構造化される整合要素とを含む。長手方向運動ワイヤは、第1のノブの回転が、従動子をガイドレールに沿って長手方向に駆動するように、第1の回転ノブを長手方向運動滑車に動作可能に連結する。回転運動ワイヤは、第2のノブの回転が、整合要素および取り付けられた細長い部材を回転させるように、第2の回転ノブを回転運動滑車に動作可能に連結する。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、概して、制御システムに関する。より具体的には、本発明は、細長い部材の長手方向運動および回転位置を制御するための、駆動システムに関する。
【背景技術】
【0002】
米国では、毎年およそ200,000人の患者が脳腫瘍と診断される。これらの腫瘍のうちのおよそ17,000は、「良性」であり、腫瘍塊が癌性ではないことを意味する。しかしながら、これらの腫瘍のうちの他のおよそ183,000は、「悪性」(すなわち、癌性)であり、それらが患者の死を引き起こす、またはそれに寄与する可能性があることを意味する。ほぼ10%の癌性脳腫瘍は、「原発」腫瘍であり、腫瘍が脳の中に由来することを意味する。原発腫瘍は、典型的に、攻撃的に成長して、正常な脳組織を変位させる、または置換する、変異DNAを伴う脳組織から成る。原発腫瘍のうちの最も一般的なものは、神経膠腫として公知であり、これは脳の神経膠細胞の癌を示す。ほとんどの場合、原発腫瘍は、単一の塊として現れる。しかしながら、これらの単一の塊は、しばしば、非常に大きく、不規則な形状で、多葉性であり、および/または周囲の脳組織の中に浸潤する可能性がある。
【0003】
原発腫瘍は、概して、患者が、挙動変化、感覚障害等の症状を経験するまで診断されない。しかしながら、症状が発現する頃までに、腫瘍は、既に大きく攻撃的になり得る。
【0004】
癌性脳腫瘍の1つの公知の治療は、手術である。具体的には、手術は、開頭術(すなわち、頭蓋骨の一部分の除去)、切開、および腫瘍の全摘出または部分摘出を伴う。手術の目的は、脳内の活性悪性細胞の除去またはその数を減らすこと、および隣接する脳構造への腫瘍の影響による痛みまたは機能障害の低減とを含む。しかしながら、元来、手術は、非常に侵襲的かつ危険である。さらに、いくつかの腫瘍について、手術は、しばしば、部分的にしか有効ではない。他の腫瘍においては、手術自体が不可能であり得、患者を障害の危険に晒し得、患者によって耐えられない場合があり、および/またはかなりの費用および回復を伴い得る。
【0005】
癌性脳腫瘍に対する別の公知の治療は、定位放射線手術(SRS)である。具体的には、SRSは、複数の交差する放射線ビームが腫瘍に方向付けられる治療方法であり、それによって、ビームの交差点は、致死量の放射線を受け、一方で、任意の単一ビームの経路の中の組織は、無傷のままである。SRSは、非侵襲的であり、典型的に、単一の外来処置として行われる。しかしながら、腫瘍が殺傷または中性化されたという確認は、しばしば、複数月にわたる後治療では不可能である。さらに、複数の、または再発性の腫瘍の場合等の、腫瘍を殺傷するのに高用量の放射線が必要とされ得る状況では、患者が、腫瘍の全てを殺傷する前に「毒性閾値」に到達することがよくあり、さらなる放射線は勧められない。
【0006】
近年、「熱」による腫瘍の治療(高熱または温熱療法とも称される)が開発された。具体的には、57℃を超えると、全ての生体組織は、凝固壊死またはアブレーションと呼ばれるプロセスを通して、即時に、かつ回復不能なほどに損傷を受けて、殺傷されることが公知である。悪性の腫瘍は、それらの高い血管新生および改変DNAのため、正常な組織よりも熱によって誘発される損傷を受け易い。レーザ、マイクロ波、高周波、電気、および超音波源等の、様々な種類のエネルギー源が使用されてもよい。用途および技術に応じて、熱源は、体外(すなわち、体の外側)、間質外(すなわち、腫瘍の外側)、または間質内(すなわち、腫瘍の内側)にあってもよい。
【0007】
間質内温熱療法(ITT)は、腫瘍内から腫瘍を加熱して破壊するように設計されたプロセスである。この種類の治療の1つの利点は、エネルギーが、周囲の正常な細胞を通過するのではなく、腫瘍に直接的に印加されることである。この種類の治療の別の利点は、エネルギー付与が、腫瘍全体を通して延長される可能性が高いことである。
【0008】
1つの例示的なITTプロセスは、光ファイバを腫瘍の中に挿入することから始まり、腫瘍は、外部源からのレーザ光の方向を、ファイバの長さに略垂直な方向に変える要素を、その「挿入された」端部に有する。したがって、レーザからのエネルギーは、端部または先端部を包囲する組織の中に延在して、加熱を生じさせる。エネルギーは、ファイバが回転する時に、ビームもファイバの軸の周りを回転して、ファイバの周囲の位置で腫瘍の異なる部分の加熱を生じさせるように、比較的に浅い角度に閉じ込められたビームの中に方向付けられる。したがって、ファイバは、周辺組織に大きな影響を及ぼさずに、腫瘍を所要の温度に加熱することを意図して、腫瘍の全容積にわたって腫瘍の加熱を生じさせるように、長手方向に移動させ、かつ回転させることができる。
【0009】
ITTプロセスで使用されるファイバは、患者の生体構造および腫瘍の場所についての外科医の知識とは別のガイダンスをほとんどまたは全く伴わない外科医によって、制御および操作され得る。したがって、外科医が、腫瘍全体を所要のレベルまで加熱し、一方で、周辺組織に対する損傷を最小化する、制御された加熱を生じさせることは困難である。
【0010】
切除すべき腫瘍および他の病巣の場所を、磁気共鳴撮像システムを使用して特定できることは公知である。これらの撮像システムは、外科医が、切除すべき腫瘍の場所を特定するのを支援するのに有益であるが、撮像システムの使用は、腫瘍の場所が外科医のためにマップされると終了する。具体的には、以前の切除手順は、治療を開始する前に、撮像システムからの患者の移動が必要であった。しかしながら、組織の一部の部分的切除または凝固とともに患者を移動させることは、切除すべき腫瘍の場所をかなり変化させる可能性がある。その結果、切除の際に、制御された精度を提供する、あらゆる可能性が排除される。
【0011】
また、磁気共鳴画像法システムは、画像内の腫瘍の温度を判定するように、および経時的にその温度の変化を判定するように、撮像シーケンスの修正によって使用できることも公知である。
【0012】
1990年4月3日に発行され、米国保健社会福祉省に譲渡された特許文献1(LeBiahan)は、組織の中の温度を判定するための方法を開示している。
【0013】
1994年2月8日に発行され、同じく米国保健社会福祉省に譲渡された特許文献2(Delannoy)は、外部の非侵襲加熱システムが磁気共鳴撮像システムのコイル内に装着された、癌の高熱治療用の装置を開示している。この開示は、推論的であり、外部加熱システムと連動した、温度のMRI測定の可能性に関係する初期の実験に関する。この特許の開示は、商業的に現実的な高熱治療システムには至らなかった。
【0014】
General Electricに譲渡された特許文献3および4は、熱の点源が、所定の熱分配を生成し、次いで、これを監視して、実際の熱分配が、加熱すべき領域の全体的な加熱を得るように、予測した熱分配に従うことを確保する、MRI制御の加熱システムに関する。ここでも、この特許を受けた配設は、商業的に現実的な高熱外科用システムに至らなかった。
【0015】
1987年6月9日に発行された、Memorial Hospital for Cancer and Allied Siseasesに譲渡され特許文献5(Fair)は、腫瘍が衝撃波を受ける、腫瘍の非外科的治療のための方法を開示している。この種類の治療は、衝撃波の効果を監視および制御する、監視システムを組み込んでいない。
【0016】
1998年10月20日に発行された、譲渡されていない特許文献6(Shaunnessey)は、光ファイバを支持するように設計された、特別に改良した内視鏡を開示している。光ファイバは、光エネルギーを放射し、エネルギーを導くように、長手方向移動して、その軸の周りで角度を付けて回転し得る。デバイスは、腫瘍を切除するために使用され、エネルギーは、切除すべき組織の蒸発を生じさせるのに十分になるように調整される。プロセス中に形成されるガスは、内視鏡を通した吸引によって除去される。MRIによって腫瘍の画像が得られ、その後、動作中にファイバが取るべき移動経路をプログラムするために使用される。ここでも、手順中に光ファイバの運動を制御するいかなるフィードバックもなく、動作は、全体的に初期の分析に依存する。この配設は、商業的または医学的な成功を収めなかった。
【0017】
1995年10月3日に発行された、Boston Scientific Corporationに譲渡された特許文献7(Lennox)は、光ファイバからの光エネルギーを腫瘍に照射する際に使用するためのデバイスを開示している。冷却液は、表面冷却を提供し、かつ表面損傷を防止し、一方で、増大したレベルのエネルギーをより深部の組織に印加することができるように、ファイバ内の管路を通して供給される。ここでも、この配設は、加熱効果のフィードバック制御を提供しない。
【0018】
1996年7月28日に発行された、MRC Systems GmbHに譲渡された特許文献8(Bille)も、脳腫瘍の照射に使用するレーザビームおよびレンズの特定の配設を開示している。具体的には、この配設は、光破断効果のために高速パルスレーザエネルギーを使用するが、エネルギーのフィードバック制御方法を開示していない。
【0019】
非特許文献1〜3は、全て、MRIによるエネルギーの印加中に腫瘍周辺の温度が監視される、ファイバを通したレーザから腫瘍への熱エネルギーの印加方法を開示している。非特許文献4と題された論文の中で、MRIフィードバック監視配設によるエネルギー制御を開示している。加えて、Voglの論文は、プローブ端部で組織を冷却するための、Somatex、Berlin、Germanyによって市販されている、冷却システムを開示している。このシステムは、外側チューブの中に装着されたファイバを含有する内側チューブによって形成される。冷却液は、連続ストリームで2つの管の間および内側チューブの内側を通過する。
【0020】
特定の応用では非常に有効であるが、脳腫瘍の治療に対するITTの使用は、周囲の正常な脳組織に対する損傷を回避するようにエネルギーを集束させることができないことにより、限定されている。これは、多くの脳腫瘍が非常に不規則な形状であるという事実によって複雑化される。
【0021】
集束レーザ間質内温熱療法(f−LITT)は、レーザに基づく温熱療法技術の次の一般的な改善である。具体的には、f−LITTは、熱エネルギー付与の正確な制御を可能にし、それによって、医師が、排他的に細胞の損傷を、事実上あらゆるサイズおよび形状の腫瘍塊内に含有させることを可能にする。しかしながら、他のITT治療システムと同様に、医師が、腫瘍塊内の治療デバイスの位置を正確に制御できるようにする装置の必要性が存在する。
【0022】
したがって、腫瘍塊等の標的に対して、細長い部材の長手方向および回転位置の両方を正確に制御することが可能である、細長い部材用の駆動システムを確立するという、これまで対処されなかった必要性が存在する。さらに、使用が簡単であり、正確かつ予測可能な結果をもたらす、細長い部材用の駆動システムが必要である。駆動システムは、好ましくは、レーザプローブ、カテーテル、内視鏡等が挙げられるが、これらに限定されない、あらゆる細長い医療デバイスと使用するために構造化されるべきである。駆動システムはまた、好ましくは、システムをMRIに適合するものにする材料から製造されるべきである。
【先行技術文献】
【特許文献】
【0023】
【特許文献1】米国特許第4,914,608号明細書
【特許文献2】米国特許第5,284,144号明細書
【特許文献3】米国特許第5,368,031号明細書
【特許文献4】米国特許第5,291,890号明細書
【特許文献5】米国特許第4,671,254号明細書
【特許文献6】米国特許第5,823,941号明細書
【特許文献7】米国特許第5,454,807号明細書
【特許文献8】米国特許第5,785,704号明細書
【非特許文献】
【0024】
【非特許文献1】Kahn他、Journal of Computer Assisted Tomography 18(4):519−532(7月/8月 1994年)
【非特許文献2】Kahn他、Journal of Magnetic Resonance Imaging 8:160−164(1998)
【非特許文献3】Vogl他、Radiology 209:381−385、1998
【非特許文献4】McNichols他、Lasers in Surgery and Medicine、34:48−55、2005、「MR Thermometry−Based Feedback Control of LITT at 980nm」
【発明の概要】
【課題を解決するための手段】
【0025】
本発明は、第1の回転ノブおよび第2の回転ノブとを有する基部ユニットと、ガイドレールに摺動可能に連結される従動子を含む従動子アセンブリと、長手方向運動ワイヤと、回転運動ワイヤとを含む、細長い部材の運動を制御するための駆動システムを提供することによって、上述の問題を解決する。従動子は、長手方向運動滑車と、回転運動滑車と、細長い部材がそれに取付可能であるように、細長い部材を受容するように構造化される整合要素とを含む。長手方向運動ワイヤは、第1のノブの回転が、従動子をガイドレールに沿って長手方向に駆動するように、第1の回転ノブを長手方向運動滑車に動作可能に連結する。回転運動ワイヤは、第2のノブの回転が、整合要素および取り付けられた細長い部材を回転させるように、第2の回転ノブを回転運動滑車に動作可能に連結する。
【図面の簡単な説明】
【0026】
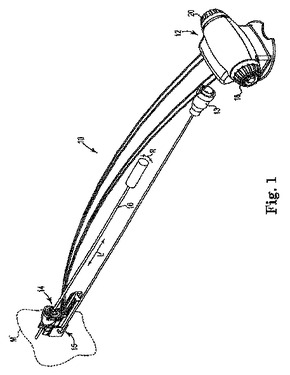
【図1】図1は、指令ユニットと、従動子アセンブリと、従動子アセンブリに連結された細長い部材とを含む、本発明による、1つの例示的な駆動システムの斜視図である。
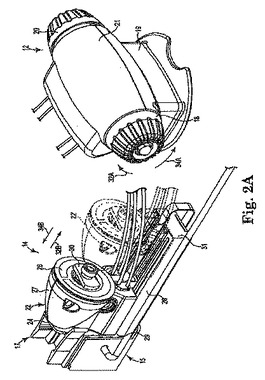
【図2A】図2Aは、従動子デバイスの長手方向運動を引き起こす第1のノブの回転を示す、図1の指令ユニットおよび従動子アセンブリの斜視図である。
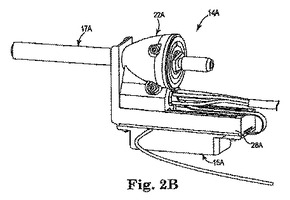
【図2B】図2Bは、本発明による1つの例示的な代替の従動子アセンブリの斜視図である。
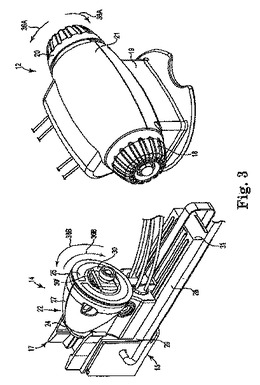
【図3】図3は、従動子デバイスの近位端上の整合デバイスの回転運動を引き起こす第2のノブの回転を示す、図1の指令ユニットおよび従動子アセンブリの斜視図である。
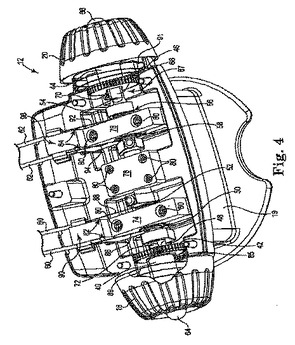
【図4】図4は、指令ユニットの内部構成要素を示すように指令ユニットのカバーを取り外した、指令ユニットの拡大斜視図である。
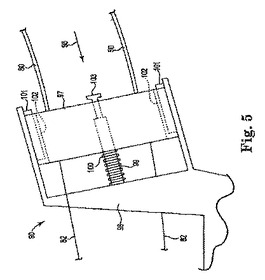
【図5】図5は、指令ユニット内の第1の張力ブロックアセンブリの側面図である。
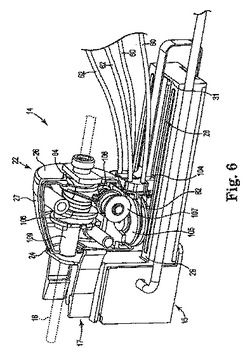
【図6】図6は、従動子デバイスの内部構成要素を示すために従動子デバイスの筐体の一部分を除去した、従動子アセンブリの拡大斜視図である。
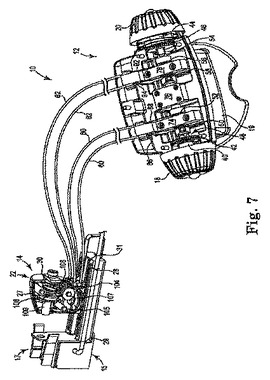
【図7】図7は、従動子デバイスが「中立」の開始位置で示される、本発明による駆動システムの斜視図である。
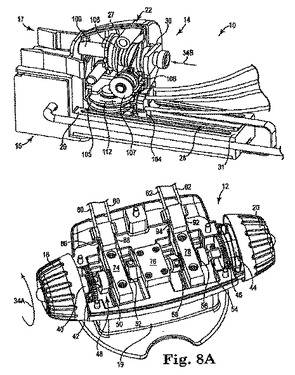
【図8A】図8Aは、従動子デバイスを長手方向かつ遠位方向に駆動する、指令ユニットの動作を示す、駆動システムの斜視図である。
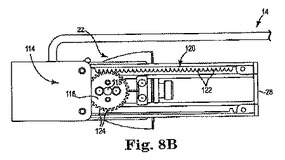
【図8B】図8Bは、従動子デバイスの図8Aに示される長手方向かつ遠位方向の運動を示す、従動子アセンブリの下側の図である。
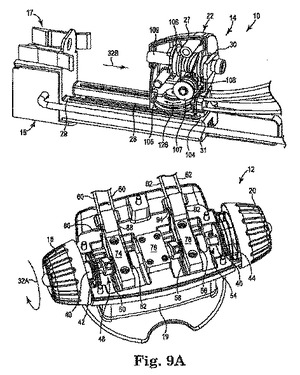
【図9A】図9Aは、従動子デバイスを長手方向かつ近位方向に駆動する、指令ユニットの動作を示す、駆動システムの斜視図である。
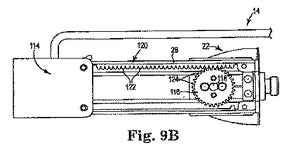
【図9B】図9Bは、従動子デバイスの図9Aに示される長手方向かつ近位方向の運動を示す、従動子アセンブリの下側の図である。
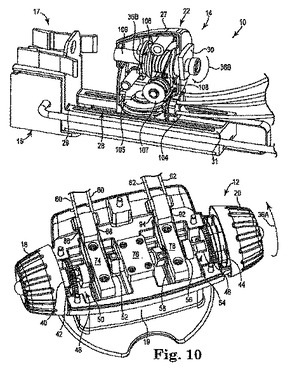
【図10】図10は、従動子デバイスの近位端から見た時に、整合デバイスを時計回り方向に回転させる、指令ユニットの動作を示す、駆動システムの斜視図である。
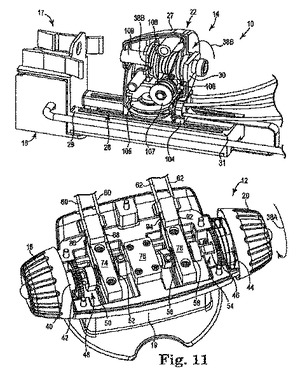
【図11】図11は、従動子デバイスの近位端から見た時に、整合デバイスを反時計回り方向に回転させる、指令ユニットの動作を示す、駆動システムの斜視図である。
【図12A】図12Aは、指令ユニットに連結された第1のロックデバイスの構造を示す図である。
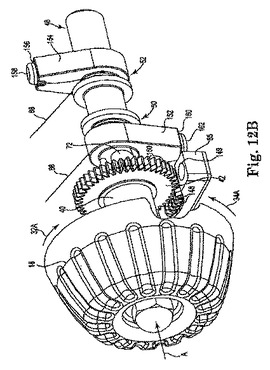
【図12B】図12Bは、ロック解除位置にある第1のノブを示す、第1のロックデバイスの斜視図である。
【発明を実施するための形態】
【0027】
本発明は、細長い部材の定位位置決め用の駆動システムを対象とする。細長い部材には、例えば、細長いプローブ、カテーテル、内視鏡等が挙げられる。しかしながら、当業者は、本発明の駆動システムが、長手方向および/または回転方向の正確な制御を必要とする、あらゆる細長い部材と連動して使用されてもよいことを理解するであろう。
【0028】
例示的な一実施形態において、本発明による駆動システムは、腫瘍の治療のために患者の頭蓋骨の中に挿入できる、レーザプローブの正確な運動を制御するように使用されてもよい。具体的には、また、以下の開示および対応する図面に基づいて、当業者に明らかになるように、駆動システムは、プローブの長手方向および回転運動の両方を通して、腫瘍内の正確な場所にプローブの遠位端を位置付けるように動作されてもよい。
【0029】
以下、図1を参照すると、指令または基部ユニット12と、従動子アセンブリ14と、コネクタ13を有する電位差計アセンブリ15と、従動子アセンブリ14に連結された細長い部材16とを含む、1つの例示的な駆動システム10が示されている。以下に詳細に説明するように、指令ユニット12は、矢印Lによって示される細長い部材16の長手方向運動を引き起こすために構造化される第1のノブ18と、矢印Rによって示される細長い部材16の回転運動を引き起こすために構造化される第2のノブ20とを有する。したがって、当業者によって理解されるように、駆動システム10は、従動子アセンブリ14の近くに破線で示される一般的な塊M等の、特定の場所または要素に対する、またはその中の細長い部材16の正確な長手方向および角度位置を制御するように利用されてもよい。
【0030】
電位差計アセンブリ15は、従動子アセンブリ14に動作可能に連結され、細長い部材16の長手方向および角度位置に関するフィードバックを、コネクタ13を通して、コンピュータシステムまたは他の処理手段に提供するように構成されてもよい。駆動システム10の動作中に細長い部材16の長手方向および回転運動を表示するために、外部ディスプレイが、コンピュータシステムまたは処理手段に動作可能に連結されてもよい。代替として、当業者によって理解されるように、ディスプレイは、外部ディスプレイの代わりに(またはこれに加えて)、指令ユニット12上に提供されてもよい。例示的な一実施形態において、細長い部材16の長手方向運動は、ミリメートル等の任意の好適な単位を有する(「ゼロ」基準点に対する)数値的な値として表示されてもよい。さらに、細長い部材16の回転運動は、「ゼロ」基準点を囲む約+180度から約−180度の間の範囲の数字等の、あらゆる好適な手法で表示されてもよい。しかしながら、当業者は、細長い部材16の長手方向および回転運動が、本発明の対象とする範囲から逸脱することなく、数多くの他の方法で、かつ数多くの他の範囲で表示されてもよいことを理解するであろう。
【0031】
図2Aは、第1のノブ18の回転および対応する従動子アセンブリ14の長手方向運動を示す、指令ユニット12および従動子アセンブリ14の斜視図である。具体的には、指令ユニット12は、指令基部19と、指令カバー21とを含む。従動子アセンブリ14は、遠位端24と、近位端26とを有する従動子デバイス22を含む。従動子デバイス22は、従動子筐体27によって覆われ、ガイドレール28に動作可能に連結され、それによって、従動子デバイス22は、ガイドレール28の遠位端29と近位端31との間を駆動され得る。電位差計アセンブリ15は、ガイドレール28の遠位端29に位置付けられ、調整可能な軌道設定取付台等の、あらゆる好適な取付台または支持部に従動子アセンブリ14を取り付けるための取付手段17が、電位差計アセンブリ15に隣接する。図2Aに示されるように、あらゆる好適な取付手段が使用されてもよいが、取付手段17は、取付手段が取付台または支持部にクリップできるように構造化される、「クリップ」型締結具を含む。
【0032】
図2Aにおいて、従動子アセンブリ14は、ガイドレールの遠位端に隣接する電位差計アセンブリと、「クリップ」型締結具を含む取付手段とを含むように示されているが、本発明の対象とする範囲から逸脱することなく、修正が行われてもよい。例えば、図2Bに示される従動子アセンブリ14Aは、本発明による従動子アセンブリの代替の例示的な一実施形態である。特に、従動子アセンブリ14Aは、概して、従動子アセンブリ14の中のそれらに類似した構成要素を含む。しかしながら、電位差計アセンブリ15Aは、ガイドレール28Aの遠位端の代わりに、従動子デバイス22Aに対向するガイドレール28Aの側に位置付けられる。加えて、取付手段17は、上述の調整可能な軌道設定取付台等の取付台または支持部内で受容されるように構造化されてもよい略管状の部材を有する、代替の取付手段17Aと置き換えられている。したがって、当業者によって理解されるように、従動子アセンブリの数多くの代替の構成が意図される。
【0033】
図2Aの従動子アセンブリ14に戻ると、従動子デバイス22の近位端26は、それに連結されて細長い部材16を受容するように構造化される、回転可能な整合デバイス30を含む。図2Aにおいて、指令ユニット12および従動子アセンブリ14のより明瞭な動作の図を提供するように、細長い部材16を省略した。しかしながら、当業者によって理解されるように、細長い部材16は、細長い部材16の長手方向および回転位置を制御するために、従動子デバイス22の長手方向運動および整合デバイス30の回転運動が、細長い部材16に直接的に変換されるように、回転可能な整合デバイス30内に固定されてもよい。
【0034】
概して図2Aに示されるように、第1のノブ18を矢印32Aによって示される方向に回転させることで、従動子デバイス22は、矢印32Bによって示される方向に、ガイドレール28に沿って、長手方向に駆動されることになり得る。この長手方向運動は、破線で示される従動子デバイス22’によって示される。同様に、第1のノブ18を矢印34Aによって示される方向に回転させることで、従動子デバイス22は、矢印34Bによって示される方向に、ガイドレール28に沿って、長手方向に駆動されることになり得る。したがって、ユーザは、第1のノブ18が回転させられた量、ならびにそれが回転させられた方向に基づいて、ガイドレール28に沿って、従動子デバイス22の正確な長手方向位置を制御し得る。
【0035】
図3は、第2のノブ20の回転、および従動子デバイス22の近位端26上の整合デバイス30の対応する回転運動を示す、指令ユニット12および従動子アセンブリ14の斜視図である。上述のように、細長い部材16は、整合デバイス30を通して挿入可能であり、かつそこに固定され得るので、整合デバイス30の回転運動は、細長い部材16の回転位置および配向を制御するように、細長い部材16を同等の量だけ回転させ得る。
【0036】
概して図3に示されるように、第2のノブ20を矢印36Aによって示される方向に回転させることで、整合デバイス30は、矢印36Bによって示される方向に、従動子デバイス22に関して回転させられることになり得る。この回転運動は、破線に示される整合デバイス30’によって示される。同様に、第2のノブ20を矢印38Aによって示される方向に回転させることで、整合デバイス30は、矢印38Bによって示される方向に、従動子デバイス22に関して回転させられることになり得る。したがって、ユーザは、第2のノブ20が回転させられた量、ならびにそれが回転させられた方向に基づいて、従動子デバイス22に関する整合デバイス30の正確な回転位置を制御し得る。
【0037】
図4は、指令ユニット12の内部構成要素を示すように指令カバー21を取り外した、指令ユニット12の拡大斜視図である。具体的には、指令ユニット12は、第1のノブ歯車42を有する第1の内部ノブ40と、第2のノブ歯車46を有する第2の内部ノブ44と、第1のスプール50および第2のスプール52を有する第1のドライブスプール軸48と、第1のスプール56および第2のスプール58を有する第2のスプール軸54と、第1のドライブスプール軸48に付随する一対のワイヤシース60と、第2の駆動スプール軸54に付随する一対のワイヤシース62とを含む。第1の内部ノブ40は、第1のノブ18の中の開口を通して、第1の内部ノブ40の端部の中のねじ付き陥凹部の中に挿入されたボルト64を介して、第1のノブ18に連結されてもよい。同様に、第2の内部ノブ44は、第2のノブ20の中の開口を通して、第2の内部ノブ44の端部の中のねじ付き陥凹部に挿入されたボルト66を介して、第2のノブ20に連結されてもよい。
【0038】
図4に示されるように、第2の駆動スプール軸54は、第2の内部ノブ44の第2のノブ歯車46の中の略正方形の開口70によって受容されて、これと噛合するように構造化される、断面が略正方形である端部分68を含んでもよい。「略正方形」という句は、図4に示されるように、「鋭い」角部および「丸みのある」角部の両方を有する実施形態を含むことを意図している。例示的な一実施形態において、正方形開口70は、第2のノブ歯車46と端部分68との間に実質的に隙間がない接続が形成されるように、端部分68とほぼ同じ寸法を有してもよい。第2の駆動スプール軸54の端部分68と正方形開口70との組み合わせは、ユーザによる第2のノブ20の回転を、第2の駆動スプール軸54へ伝達できるようにする。同様に、第1の駆動スプール軸48は、第1の内部ノブ40の第1のノブ歯車42の略正方形の開口(図示せず)によって受容されて、これと噛合するように構造化される、断面が略正方形である端部分72を含んでもよい。ここでも、正方形開口は、第1のノブ歯車42と端部分72との間に実質的に隙間がない接続が形成されるように、端部分72とほぼ同じ寸法を有してもよい。
【0039】
第1および第2の駆動スプール軸48および54が、それぞれ、略正方形開口と噛合する略正方形の端部分72および68を含むものとして説明してきたが、当業者は、駆動スプール軸が、代替的に、例えば三角形、長方形、六角形等を含む数多くの他の断面形状を有する端部分を含んでもよいことを理解するであろう。したがって、ノブ歯車から駆動スプール軸に回転運動を伝達することができるようになる、あらゆる形状の組み合わせが意図され、かつ本発明の対象とする範囲の範囲内にある。
【0040】
上記に説明された第1のノブ歯車42への接続に加えて、第1の駆動スプール軸48が、第1のスプール軸頂部キャリア74および駆動軸固定具76によって指令ユニット12内に含有されてもよい。同様に、上記に説明された第2のノブ歯車46への接続に加えて、第2の駆動スプール軸54が、第2のスプール軸頂部キャリア78および駆動軸固定具76によって指令ユニット12内に含有されてもよい。当業者によって理解されるように、第1のスプール軸頂部キャリア74、第2のスプール軸頂部キャリア78、および駆動軸固定具76は、第1および第2の駆動スプール軸48および54を含有し、かつ軸が回転できるようにするためのブッシュを形成するように、指令基部19と一緒に機能する。組立中に、第1および第2の駆動スプール軸48および54が指令ユニット12内に適切に位置付けられると、第1および第2のスプール軸頂部キャリア74および78は、どちらも、駆動軸固定具76とともに、指令基部19に固定されてもよい。例示的な一実施形態において、第1のスプール軸頂部キャリア74、第2のスプール軸頂部キャリア78、および駆動軸固定具76は、ねじ80で指令基部19に固定されるが、当業者によって理解されるように、ボルトまたは接着剤等のあらゆる好適な締結手段が使用されてもよい。当業者はまた、第1および第2の駆動スプール軸48および54は、駆動軸固定具76の使用が必要でなくなるように、第1および第2のスプール軸頂部キャリア74および78とともに形成されたブッシュによって十分に含有されてもよいことを理解するであろう。したがって、代替の一実施形態において、駆動軸固定具76は、本発明の精神および範囲から逸脱することなく、指令ユニット12から除去されてもよい。
【0041】
図4に示されるように、駆動システム10はさらに、第1の駆動スプール軸48に動作可能に取り付けられる長手方向運動ワイヤ82と、第2の駆動スプール軸54に動作可能に取り付けられる回転運動ワイヤ84とを含む。具体的には、長手方向運動ワイヤ82の第1の端部86は、第1の駆動スプール軸48に付随するワイヤシース60のうちの1つから延在して、第1のスプール50の周りに巻き付き、一方で、長手方向運動ワイヤ82の第2の端部88は、ワイヤシース60のうちの他の1つから延在して、第2のスプール52の周りに巻き付く。図4にさらに示されるように、回転運動ワイヤ84の第1の端部92は、第2の駆動スプール軸54に付随するワイヤシース62のうちの1つから延在して、第1のスプール56の周りに巻き付き、一方で、回転運動ワイヤ84の第2の端部94は、ワイヤシース62のうちの他の1つから延在して、第2のスプール58の周りに巻き付く。
【0042】
第1および第2のノブ18および20が、使用されていない時に意図せずに回転させられて、ロック位置にされることを防止するために、駆動システム10はまた、第1および第2のロックデバイス85および87を含む。具体的には、第1のロックデバイス85は、第1のノブ18をロックするために、第1のノブ歯車42に係合するように構造化され、一方で、第2のロックデバイス87は、第2のノブ20をロックするために、第2のノブ歯車46に係合するように構造化される。したがって、第1および第2のロックデバイス85および87は、細長い部材16の長手方向および回転位置が意図せずに変化させられ得る可能性を最小化する、「安全」デバイスとして機能する。以下にさらに詳細に論じられるように、第1のロックデバイス85を係脱して、第1のノブ18を回転させることができるようにし、したがって、ユーザが、細長い部材16の長手方向位置を操作できるようにするために、第1のノブ18と指令基部19との間に配置された第1のばね89の力に逆らって、軸方向力を第1のノブ18に印加しなければならない。同様に、第2のロックデバイス87を係脱して、第2のノブ20を回転させることができるようにし、したがって、ユーザが、細長い部材16の回転位置を操作できるようにするために、第2のノブ20と指令基部19との間に配置された第2のばね91の力に逆らって、軸方向力を第2のノブ20に印加しなければならない。
【0043】
随意に、図4に示されるように、第1の駆動スプール軸48に付随する一対のワイヤシース60は、第1の張力ブロックアセンブリ90に連結されてもよく、一方で、第2の駆動スプール軸54に付随する一対のワイヤシース62は、第2の張力ブロックアセンブリ96に連結されてもよい。特に、第1および第2の張力ブロックアセンブリ90および96は、本発明の不要な構成要素であるが、張力ブロックアセンブリは、ワイヤがそれらのそれぞれの駆動スプール軸上に巻回およびそれらから巻出される時に、それぞれ、長手方向および回転運動ワイヤ82および84にかかる張力を軽減するように機能する。以下、張力ブロックアセンブリの例示的な一実施形態を、図5を参照して説明する。
【0044】
具体的には、図5は、第1の張力ブロックアセンブリ90の側面を示す図である。第1の張力ブロックアセンブリ90は、概して、シースコネクタブロック97と、シースコネクタブロックホルダ98と、シースコネクタブロック97を通して開口の中に挿入されるように構造化される、ポスト部材99と、ばね100とを含む。シースコネクタブロックホルダ98は、シースコネクタブロック97の中で一対のスロット102によって受容されるように構造化される、一対のフランジ101を含む。締結具103は、シースコネクタブロック97の運動を制限して、フランジ101がスロット102から除去されるのを防止するために、シースコネクタブロック97をポスト部材99に連結する。駆動システム10の動作中に、シースコネクタブロック97は、ワイヤが第1の駆動スプール軸48上に巻回およびそこから巻出される時に、長手方向運動ワイヤ82にかかる張力を軽減するために、必要に応じて矢印95によって示される方向に移動してもよい。したがって、シースコネクタブロック97は、長手方向運動ワイヤ82が指令ユニット12との間を進行する方向と実質的に一致する方向に進行するように構造化される。これは、駆動システムの動作中に長手方向運動ワイヤ82が壊れる可能性を最小化し、かつ第1のノブ18のより滑らかな回転を提供する。当業者は、第1の張力ブロックアセンブリ90に着目した上述の考察が、単に例示の目的のためであり、限定するためのものではなく、第2の張力ブロックアセンブリ96が、同じような手法で設計されてもよいことを理解するであろう。
【0045】
当業者によって理解されるように、数多くの代替の張力ブロックアセンブリが指令ユニット12の中に組み込まれてもよい。例えば、1つの代替の張力ブロックアセンブリにおいて、シースコネクタブロックは、長手方向運動ワイヤ82の運動方向と実質的に一致する方向に進行するのではなく、代わりに、シースコネクタブロックが、長手方向運動ワイヤ82の運動方向に実質的に垂直である方向に進行するように設計されてもよい。したがって、ワイヤが指令ユニット12との間を進行する時に長手方向運動ワイヤ82にかかる張力を最小化するために、長手方向運動ワイヤ82が、シースコネクタブロック上に「乗って」、それによって誘導される時に、シースコネクタブロックに動作可能に連結されたポストおよびばねは、ブロックが、長手方向運動ワイヤ82の進行方向に実質的に垂直な方向に進行できるようにする。
【0046】
図6は、従動子デバイス22の内部構成要素を示すために従動子の筐体27の一部分を除去した、従動子アセンブリ14の拡大斜視図である。具体的には、従動子デバイス22は、レール従動子部材104と、長手方向運動滑車105と、回転運動滑車106と、第1の遊び滑車107と、第2の遊び滑車108と、細長い部材16を受容するための管状部材109とを含む。図6に示されるように、レール従動子部材104は、従動子デバイス22がレールに沿って長手方向に移動する時に、ガイドレール28によって受容されて、その中に乗るように構造化される。長手方向運動滑車105は、長手方向運動ワイヤ82を含有する一対のワイヤシース60に隣接して位置付けられてもよい。長手方向運動ワイヤ82は、ワイヤシース60のうちの第1の1つから延在し、長手方向運動滑車105の周りに巻き付き、そして再び、指令ユニット12に戻るワイヤシース60のうちの第2の1つに入る。
【0047】
回転運動滑車106は、管状部材109および整合デバイス30に連結されるか、またはこれらと一体的に形成される。したがって、回転運動滑車106が回転運動ワイヤ84によって回転させられる時に、回転運動が、管状部材109および整合デバイス30に伝達される。第1の遊び滑車107は、ワイヤシース62のうちの第1の1つに隣接して位置付けられてもよく、一方で、第2の遊び滑車108は、ワイヤシース62のうちの第2の1つに隣接して位置付けられてもよい。回転運動ワイヤ84は、回転運動滑車106に到達してその周りに巻き付く前に、ワイヤシース62のうちの第1の1つから延在して、第1の遊び滑車107の周りに巻き付く。次いで、回転運動ワイヤ84は、指令ユニット12に戻るワイヤシース62のうちの第2の1つに再び入る前に、第2の遊び滑車108から延在してその周りに巻き付く。
【0048】
図7は、「中立」の開始位置で示される従動子アセンブリ14の従動子デバイス22を伴う、駆動システム10の斜視図である。ガイドレール28の遠位端29と近位端31とのほぼ中間にある、この従動子デバイス22の中立の開始位置は、単に例示の目的のためであり、限定するために画定されたものではない。したがって、以下、駆動システム10の動作は、図7に示される中立の開始位置を参照して説明される。しかしながら、当業者は、開始位置が、本発明の対象とする範囲から逸脱することなく、ガイドレール28に沿った他のいくつかの場所として画定されてもよいことを理解するであろう。
【0049】
図8Aは、従動子デバイス22をガイドレール28の遠位端29に向かって長手方向に駆動する、指令ユニット12動作を示す、駆動システム10の斜視図である。具体的には、図8Aに示されるように、第1のノブ18を矢印34Aによって示される方向に回転させることで、従動子デバイス22を、図7に示される中立の開始位置から、ガイドレール28の遠位端29に隣接する新しい位置に、矢印34Bによって示される方向に、長手方向に駆動する。図1を参照すると、従動子デバイス22を、矢印34Bによって示される方向に、長手方向に駆動することの効果は、細長い部材16を塊Mの中に(または、細長い部材16が、既に塊内にい続けられていた場合は、さらに塊Mの中に)駆動することである。
【0050】
図4を参照して先に論じたように、第1のノブ18が矢印34Aによって示される方向に回転させられる時に、第1の駆動スプール軸48の端部分72と第1の内部ノブ40の第1のノブ歯車42との間の接続により、第1の駆動スプール軸48も類似した方向に回転させられる。その結果、長手方向運動ワイヤ82の第1の端部86は、第1の駆動スプール軸48の第1のスプール50の周りにさらに巻回され、一方で、長手方向運動ワイヤ82の第2の端部88は、第2のスプール52からさらに巻出される。それに応じて、当業者によって理解されるように、長手方向運動ワイヤ82の第1の端部86および第2の端部88が、それぞれ、第1および第2のスプール50および52上に巻回およびそれらから巻出されている間に、長手方向運動滑車105は、図8Aにおいて矢印112によって示される方向に回転する。図8Bを参照してより詳細に論じられるように、矢印112によって示される方向の長手方向運動滑車105の回転は、従動子デバイス22の、図8Aに示される遠位位置に長手方向への駆動を引き起こす。
【0051】
図8Bは、従動子アセンブリ14の下側114を示す図である。図8Bに示されるように、従動子アセンブリ14はさらに、好適な接続手段118を介して、長手方向運動滑車105に動作可能に連結される、従動歯車116を含む。接続手段118は、図8Aを参照して説明される長手方向運動滑車105の運動を、従動歯車116に連結するように構造化される。したがって、例えば、長手方向運動滑車105が図8Aの矢印112によって示される方向に回転させられる時に、従動歯車116が接続手段118を介して運動滑車105に動作可能に連結されているため、それに応じて従動歯車116も、112の方向に回転させられる。
【0052】
従動子アセンブリ14の下側114は、従動歯車116上の対応する複数の歯124と噛合するように構造化される複数の歯122を有する、ガイドレール28の歯車トラック部分120を示す。したがって、従動歯車116が長手方向運動滑車105によって回転させられている時に、従動歯車116上の歯124は、従動歯車116、したがって、従動子デバイス22を歯車トラック120に沿って長手方向に駆動するために、歯車トラック120上の歯122に係合する。
【0053】
図9Aは、従動子デバイス22をガイドレール28の近位端31に向かって長手方向に駆動する、指令ユニット12の動作を示す、駆動システム10の斜視図である。具体的には、図9Aに示されるように、第1のノブ18を矢印32Aによって示される方向に回転させることで、従動子デバイス22を、図7に示される中立の開始位置から(または、例えば、図8Aに示される位置から)、ガイドレール28の近位端31に隣接する新しい位置に、矢印32Bによって示される方向に、長手方向に駆動する。図1を参照すると、従動子デバイス22を、矢印32Bによって示される方向に、長手方向に駆動すること効果は、細長い部材16を塊Mから引き出すことであり得る。
【0054】
ここでも、第1のノブ18を矢印32Aによって示される方向に回転させることで、第1の駆動スプール軸48の類似した方向への回転を引き起こす。その結果、長手方向運動ワイヤ82の第2の端部88は、第1の駆動スプール軸48の第2のスプール52の周りにさらに巻回され、一方で、長手方向運動ワイヤ82の第1の端部86は、第1のスプール50からさらに巻出される。それに応じて、当業者によって理解されるように、長手方向運動ワイヤ82の第1の端部86および第2の端部88が、それぞれ、第1および第2のスプール50および52から巻出およびそれらの上に巻回されている間に、長手方向運動滑車105は、図9Aにおいて矢印126によって示される方向に回転する。矢印126によって示される方向の長手方向運動滑車105の回転は、従動子デバイス22の、図9Aに示される近位位置への長手方向の駆動を引き起こす。
【0055】
図9Bは、従動子デバイス22がガイドレール28の近位端31に駆動された後の、従動子アセンブリ14のガイドレール部分28の下側114を示す図である。接続手段118が長手方向運動滑車105の運動を従動歯車116に連結するので、矢印126によって示される方向の滑車105の回転は、従動歯車116の類似した方向への対応する回転を引き起こす。具体的には、従動歯車116が長手方向運動滑車105によって回転させられている時に、従動歯車116上の歯124は、従動歯車116、したがって、従動子デバイス22を、歯車トラック120に沿って、図9Bに示される近位位置に長手方向に駆動するために、歯車トラック120上の歯122に係合する。
【0056】
図10は、従動子デバイス22の近位端26から見た時に、整合デバイス30を時計回り方向に回転させる、指令ユニット12の動作を示す、駆動システム10の斜視図である。具体的には、図10に示されるように、第2のノブ20を矢印36Aによって示される方向に回転させることで、整合デバイス30は、図7に示される中立の開始位置から、矢印36Bによって示される方向に回転する。図1を参照すると、整合デバイス30を、矢印36Bによって示される方向に回転させることの効果は、静止した状態である塊Mに対して、取り付けられた細長い部材16を回転させることである。図10に示されるように、整合デバイス30は、時計回り方向にほぼ90度回転させられている。しかしながら、当業者は、整合デバイス30を、ゼロから360度の間の任意の量だけ回転させてもよいことを理解するであろう。
【0057】
図4を参照して先に論じたように、第2のノブ20が矢印36Aによって示される方向に回転させられる時に、第2の駆動スプール軸54の端部分68と第2の内部ノブ44の第2のノブ歯車46との間の接続により、第2の駆動スプール軸54も類似した方向に回転させられる。その結果、回転運動ワイヤ84の第1の端部92は、第2の駆動スプール軸54の第1のスプール56の周りにさらに巻回され、一方で、回転運動ワイヤ84の第2の端部94は、第2のスプール58からさらに巻出される。それに応じて、当業者によって理解されるように、回転運動ワイヤ84の第1の端部92および第2の端部94が、それぞれ、第1および第2のスプール56および58上に巻回およびそれらから巻出されている間に、回転運動滑車106は、図10において矢印36Bによって示される方向に回転する。回転運動滑車106は、整合デバイス30に連結、またはこれと一体的に形成されるので、整合デバイス30も、矢印36Bによって示される方向に回転する。
【0058】
図11は、従動子デバイス22の近位端26から見た時に、整合デバイス30を反時計回り方向に回転させる、指令ユニット12の動作を示す、駆動システム10の斜視図である。具体的には、図11に示されるように、第2のノブ20を矢印38Aによって示される方向に回転させることで、整合デバイス30は、図10に示される位置から図7に示される中立の開始位置に、矢印38Bによって示される方向に回転する。整合デバイス30は、反時計回りにほぼ90度だけ回転させられたように示されているが、当業者は、整合デバイス30が、本発明の対象とする範囲から逸脱することなく、異なる量だけ回転させられるように、第2のノブ20が操作されてもよいことを理解するであろう。
【0059】
ここでも、第2のノブ20を矢印38Aによって示される方向に回転させることで、第2の駆動スプール軸54の類似した方向への回転を引き起こす。その結果、回転運動ワイヤ84の第2の端部94は、第2の駆動スプール軸54の第2のスプール58の周りにさらに巻回され、一方で、回転運動ワイヤ84の第1の端部92は、第1のスプール56からさらに巻出される。それに応じて、当業者によって理解されるように、回転運動ワイヤ84の第1の端部92および第2の端部94が、それぞれ、第1および第2のスプール56および58から巻出およびそれらの上に巻回されている間に、回転運動滑車106は、図11において矢印38Bによって示される方向に回転する。回転運動滑車106へのその取り付けにより、整合デバイス30も、矢印38Bによって示される方向に回転させられる。
【0060】
図12Aは、図4を参照して上述した、第1のノブ18で動作するように構造化される、第1の係止デバイス85を示す図である。指令ユニット12はまた、第2のノブ20で動作するように構造化される、第2の係止デバイス87を含むが、第1および第2の係止デバイス85および87は、どちらも、実質的に同一に動作する。したがって、第1の係止デバイス85が詳細に示されて説明されるが、その議論は、同様に第2の係止デバイス87にも適用される。
【0061】
図12Aに示されるように、第1の係止デバイス85は、指令基部19の内面に係合するように構造化される底面142と、複数の係止歯148を伴う湾曲部分146を有する頂面144とを含む。係止デバイス85は、開口149を通して挿入される締結具等の、あらゆる好適な手段によって指令基部19に連結されてもよい。別の例示的実施形態において、係止デバイス85は、指令基部19と一体的に形成、または接着剤で指令基部19に連結されてもよい。係止歯148は、第1のノブ18が「係止」位置にある時に、第1のノブ歯車42上の複数のノブ歯車歯150に係合するように構造化される。具体的には、第1のノブ18は、通常、第1のばね89によって係止位置に付勢されており、また、以前に説明した手法で細長い部材16の長手方向位置を調整する前に、図12Bに示されるように、「係止解除」位置に第1のばね89のばね力に逆らって移動させなければならない。
【0062】
図12Bは、係止解除位置にある第1のノブ18を示す、第1のノブ18および第1の係止デバイス85の斜視図である。具体的には、図2A、8A、および9Aを参照して以前に説明したように、第1のノブ18を矢印32Aによって示される方向または矢印34Aによって示される方向のいずれかに回転させる前に、第1のノブ18を係止解除位置に移動させなければならない。第1のノブ18は、軸方向力Aを第1のノブ18に印加することによって、図12Aに示される係止位置から、図12Bに示される係止解除位置に移動させられ得、それによって、第1の係止デバイス85上の係止歯148から、第1のノブ歯車42上のノブ歯車歯150を係脱する。ノブ歯車歯150が係止歯148から係脱されると、ユーザは、軸方向力Aが保持されている限り、第1のノブ18を、矢印32Aおよび34Aによって示される方向に自由に回転させてもよい。細長い部材16の長手方向位置のさらなる操作がもはや必要でなくなった時、ユーザは、単に、軸方向力Aの印加を止めればよく、そして、第1のばね部材89は、ノブ歯車歯150を係止歯148との係合状態に戻すように押し込み、それによって、第1のノブ18のさらなる回転を防止する。当業者が理解するように、細長い部材16の長手方向位置は、軸方向力Aを第1のノブ18に再度印加してノブを回転させることによって、さらに操作されてもよい。
【0063】
図12にさらに示されるように、第1の駆動スプール軸48は、第1のスプール50に隣接する、第1の軸フランジ152と、第2のスプール52に隣接する、第2の軸フランジ154とを含んでもよい。具体的には、長手方向運動ワイヤ82の第2の端部88は、第2の軸フランジ154に沿って延在して、その端部分156に締結手段158で固定されてもよい。同様に、図12Bには示されていないが、長手方向運動ワイヤ82の第1の端部86は、第1の軸フランジ152に沿って延在して、その端部分160に締結手段162で固定されてもよい。
【0064】
当業者は、駆動システム10が、特定の方向の長手方向および回転運動をもたらす、第1および第2のノブ18および20の回転運動に関して説明されてきたが、該駆動システムは、ノブの回転が、本発明の対象とする範囲から逸脱することなく、代わりに、反対方向の運動をもたらしてもよいことを理解するであろう。したがって、ノブ18および20の操作の結果として、細長い部材16が移動する特定の方向は、本発明の必須構成要素ではない。
【0065】
本発明を好適な実施形態を参照して説明したが、当業者は、本発明の精神および範囲から逸脱することなく、形状および細部の変更が行われ得ることを認識するであろう。
(項目1)
細長い部材の運動を制御するための駆動システムであって、
第1の回転ノブと第2の回転ノブとを有する基部ユニットと、
ガイドレールに摺動可能に連結される従動子を含む従動子アセンブリであって、該従動子は、長手方向運動滑車と、回転運動滑車と、該細長い部材がそれに取付可能であるように、該細長い部材を受容するよう構造化される整合要素とを含む、従動子アセンブリと、
該第1のノブの回転が、該従動子を該ガイドレールに沿って長手方向に駆動するように、該第1の回転ノブを該長手方向運動滑車に動作可能に連結する、長手方向運動ワイヤと、
該第2のノブの回転が、該整合要素および取り付けられた細長い部材を回転させるように、該第2の回転ノブを該回転運動滑車に動作可能に連結する、回転運動ワイヤと
を備える、駆動システム。
(項目2)
上記第1のノブは、第1の駆動スプール軸に動作可能に連結され、上記第2のノブは、第2の駆動スプール軸に動作可能に連結される、項目1に記載の駆動システム。
(項目3)
上記長手方向運動ワイヤは、上記第1の駆動スプール軸を上記長手方向運動滑車に動作可能に連結し、上記回転運動ワイヤは、上記第2の駆動スプール軸を上記回転運動滑車に動作可能に連結し、上記第2のノブの回転は、上記整合要素の回転運動を引き起こす、該回転運動ワイヤの長手方向運動を生じさせる、項目2に記載の駆動システム。
(項目4)
上記基部ユニットはさらに、
第1のノブ歯車を有する第1の内部ノブであって、該第1の内部ノブは、上記第1の回転ノブを上記第1の駆動スプール軸に動作可能に連結する、第1の内部ノブと、
第2のノブ歯車を有する第2の内部ノブであって、該第2の内部ノブは、上記第2の回転ノブを上記第2の駆動スプール軸に動作可能に連結する、第2の内部ノブと
を備える、項目2に記載の駆動システム。
(項目5)
上記第1の内部ノブはさらに、複数のノブ歯車の歯を有する、第1のノブ歯車を備える、項目4に記載の駆動システム。
(項目6)
上記第1の駆動スプール軸は、断面がほぼ正方形である端部分を含む、項目5に記載の駆動システム。
(項目7)
上記第1の内部ノブの上記第1のノブ歯車は、上記第1の駆動スプール軸の断面がほぼ正方形である端部分を受容するように構造化される開口を含む、項目6に記載の駆動システム。
(項目8)
上記基部ユニットに連結される係止デバイスをさらに備え、該係止デバイスは、上記第1の回転ノブが係止位置にあるときに、上記複数のノブ歯車の歯と係合可能である複数の係止歯を有する、項目5に記載の駆動システム。
(項目9)
上記第1の駆動スプール軸は、上記長手方向運動ワイヤの第1の端部を受容するように構造化される第1のスプールと、該長手方向運動ワイヤの第2の端部を受容するように構造化される第2のスプールとを備える、項目2に記載の駆動システム。
(項目10)
上記第2の駆動スプール軸は、上記回転運動ワイヤの第1の端部を受容するように構造化される第1のスプールと、該回転運動ワイヤの第2の端部を受容するように構造化される第2のスプールとを備える、項目9に記載の駆動システム。
(項目11)
上記従動子はさらに、上記回転運動ワイヤを係合するための、上記回転運動滑車に隣接して位置付けられる、1つ以上の遊び滑車部材を備える、項目1に記載の駆動システム。
(項目12)
上記従動子アセンブリはさらに、
上記長手方向運動滑車に連結され、複数の歯車の歯を含む、従動歯車と、
該従動歯車の、歯車の歯に係合するように構造化される複数の歯車トラックの歯を有する、歯車トラックと
を備える、項目1に記載の駆動システム。
(項目13)
上記基部ユニットと上記従動子アセンブリとの間に延在し、その中で上記長手方向運動ワイヤを受容するように構造化される、第1の一対のワイヤシースと、
上記基部ユニットと上記従動子アセンブリとの間に延在し、その中で上記回転運動ワイヤを受容するように構造化される、第2の一対のワイヤシースと
をさらに備える、項目1に記載の駆動システム。
(項目14)
上記第1の一対のワイヤシースに取付可能である、第1の張力ブロックアセンブリと、
上記第2の一対のワイヤシースに取付可能である、第2の張力ブロックアセンブリと
をさらに備える、項目13に記載の駆動システム。
(項目15)
上記従動子アセンブリはさらに、上記長手方向運動滑車に連結され、上記従動子を上記ガイドレールに沿って長手方向に駆動するために歯車トラックに沿って移動可能である、従動歯車を備える、項目1に記載の駆動システム。
(項目16)
細長い部材の運動を制御するための方法であって、
駆動システムを提供することであって、該駆動システムは、
第1の回転ノブと、第2の回転ノブとを有する、基部ユニットと、
ガイドレールに摺動可能に連結される従動子を含む、従動子アセンブリであって、該従動子は、長手方向運動滑車と、回転運動滑車と、該細長い部材がそれに取付可能であるように、該細長い部材を受容するよう構造化される整合要素とを含む、従動子アセンブリと、
該第1の回転ノブを該長手方向運動滑車に動作可能に連結する、長手方向運動ワイヤと、
該第2の回転ノブを該回転運動滑車に動作可能に連結する、回転運動ワイヤと
を備える、ことと、
該従動子を該ガイドレールに沿って長手方向に駆動するように、該第1の回転ノブを回転させることと、
該整合要素および取り付けられた細長い部材を回転させるように、該第2の回転ノブを回転させることと
を含む、方法。
(項目17)
上記従動子アセンブリはさらに、
上記長手方向運動滑車に連結され、複数の歯車の歯を含む、従動歯車と、
上記従動歯車の上記歯車の歯に係合するように構造化される複数の歯車トラックの歯を有する、歯車トラックと、
を備える、項目16に記載の方法。
(項目18)
上記第1のノブは、第1の駆動スプール軸に動作可能に連結され、上記第2のノブは、第2の駆動スプール軸に動作可能に連結される、項目16に記載の方法。
(項目19)
上記長手方向運動ワイヤは、上記第1の駆動スプール軸を上記長手方向運動滑車に動作可能に連結し、上記回転運動ワイヤは、上記第2の駆動スプール軸を上記回転運動滑車に動作可能に連結し、上記第2のノブの回転は、上記整合要素の回転運動を引き起こす、上記回転運動ワイヤの長手方向運動を生じさせる、項目18に記載の方法。
(項目20)
上記ガイドレールに沿って上記従動子を駆動するように上記ノブを回転させる前に、上記第1の回転ノブを係止位置から係止解除位置に移動させることをさらに含む、項目16に記載の方法。
(項目21)
上記整合要素および取り付けられた細長い部材を回転させるように上記ノブを回転させる前に、上記第2の回転ノブを係止位置から係止解除位置に移動させることをさらに含む、項目20に記載の方法。
(項目22)
上記第1および第2の回転ノブはそれぞれ、上記ノブが上記係止位置にあるときに、上記基部ユニットの対応する複数の係止歯に係合するように構造化される、複数のノブ歯車の歯を含む、項目21に記載の方法。
(項目23)
上記第1および第2の回転ノブは、実質的に軸方向の力を上記ノブに適用することによって、上記係止位置から上記係止解除位置に移動させられてもよい、項目22に記載の方法。
(項目24)
上記第1および第2の回転ノブの上記ノブ歯車の歯は、上記ノブが上記係止解除位置に移動させられたときに、上記対応する係止歯から係脱される、項目23に記載の方法。
【技術分野】
【0001】
本発明は、概して、制御システムに関する。より具体的には、本発明は、細長い部材の長手方向運動および回転位置を制御するための、駆動システムに関する。
【背景技術】
【0002】
米国では、毎年およそ200,000人の患者が脳腫瘍と診断される。これらの腫瘍のうちのおよそ17,000は、「良性」であり、腫瘍塊が癌性ではないことを意味する。しかしながら、これらの腫瘍のうちの他のおよそ183,000は、「悪性」(すなわち、癌性)であり、それらが患者の死を引き起こす、またはそれに寄与する可能性があることを意味する。ほぼ10%の癌性脳腫瘍は、「原発」腫瘍であり、腫瘍が脳の中に由来することを意味する。原発腫瘍は、典型的に、攻撃的に成長して、正常な脳組織を変位させる、または置換する、変異DNAを伴う脳組織から成る。原発腫瘍のうちの最も一般的なものは、神経膠腫として公知であり、これは脳の神経膠細胞の癌を示す。ほとんどの場合、原発腫瘍は、単一の塊として現れる。しかしながら、これらの単一の塊は、しばしば、非常に大きく、不規則な形状で、多葉性であり、および/または周囲の脳組織の中に浸潤する可能性がある。
【0003】
原発腫瘍は、概して、患者が、挙動変化、感覚障害等の症状を経験するまで診断されない。しかしながら、症状が発現する頃までに、腫瘍は、既に大きく攻撃的になり得る。
【0004】
癌性脳腫瘍の1つの公知の治療は、手術である。具体的には、手術は、開頭術(すなわち、頭蓋骨の一部分の除去)、切開、および腫瘍の全摘出または部分摘出を伴う。手術の目的は、脳内の活性悪性細胞の除去またはその数を減らすこと、および隣接する脳構造への腫瘍の影響による痛みまたは機能障害の低減とを含む。しかしながら、元来、手術は、非常に侵襲的かつ危険である。さらに、いくつかの腫瘍について、手術は、しばしば、部分的にしか有効ではない。他の腫瘍においては、手術自体が不可能であり得、患者を障害の危険に晒し得、患者によって耐えられない場合があり、および/またはかなりの費用および回復を伴い得る。
【0005】
癌性脳腫瘍に対する別の公知の治療は、定位放射線手術(SRS)である。具体的には、SRSは、複数の交差する放射線ビームが腫瘍に方向付けられる治療方法であり、それによって、ビームの交差点は、致死量の放射線を受け、一方で、任意の単一ビームの経路の中の組織は、無傷のままである。SRSは、非侵襲的であり、典型的に、単一の外来処置として行われる。しかしながら、腫瘍が殺傷または中性化されたという確認は、しばしば、複数月にわたる後治療では不可能である。さらに、複数の、または再発性の腫瘍の場合等の、腫瘍を殺傷するのに高用量の放射線が必要とされ得る状況では、患者が、腫瘍の全てを殺傷する前に「毒性閾値」に到達することがよくあり、さらなる放射線は勧められない。
【0006】
近年、「熱」による腫瘍の治療(高熱または温熱療法とも称される)が開発された。具体的には、57℃を超えると、全ての生体組織は、凝固壊死またはアブレーションと呼ばれるプロセスを通して、即時に、かつ回復不能なほどに損傷を受けて、殺傷されることが公知である。悪性の腫瘍は、それらの高い血管新生および改変DNAのため、正常な組織よりも熱によって誘発される損傷を受け易い。レーザ、マイクロ波、高周波、電気、および超音波源等の、様々な種類のエネルギー源が使用されてもよい。用途および技術に応じて、熱源は、体外(すなわち、体の外側)、間質外(すなわち、腫瘍の外側)、または間質内(すなわち、腫瘍の内側)にあってもよい。
【0007】
間質内温熱療法(ITT)は、腫瘍内から腫瘍を加熱して破壊するように設計されたプロセスである。この種類の治療の1つの利点は、エネルギーが、周囲の正常な細胞を通過するのではなく、腫瘍に直接的に印加されることである。この種類の治療の別の利点は、エネルギー付与が、腫瘍全体を通して延長される可能性が高いことである。
【0008】
1つの例示的なITTプロセスは、光ファイバを腫瘍の中に挿入することから始まり、腫瘍は、外部源からのレーザ光の方向を、ファイバの長さに略垂直な方向に変える要素を、その「挿入された」端部に有する。したがって、レーザからのエネルギーは、端部または先端部を包囲する組織の中に延在して、加熱を生じさせる。エネルギーは、ファイバが回転する時に、ビームもファイバの軸の周りを回転して、ファイバの周囲の位置で腫瘍の異なる部分の加熱を生じさせるように、比較的に浅い角度に閉じ込められたビームの中に方向付けられる。したがって、ファイバは、周辺組織に大きな影響を及ぼさずに、腫瘍を所要の温度に加熱することを意図して、腫瘍の全容積にわたって腫瘍の加熱を生じさせるように、長手方向に移動させ、かつ回転させることができる。
【0009】
ITTプロセスで使用されるファイバは、患者の生体構造および腫瘍の場所についての外科医の知識とは別のガイダンスをほとんどまたは全く伴わない外科医によって、制御および操作され得る。したがって、外科医が、腫瘍全体を所要のレベルまで加熱し、一方で、周辺組織に対する損傷を最小化する、制御された加熱を生じさせることは困難である。
【0010】
切除すべき腫瘍および他の病巣の場所を、磁気共鳴撮像システムを使用して特定できることは公知である。これらの撮像システムは、外科医が、切除すべき腫瘍の場所を特定するのを支援するのに有益であるが、撮像システムの使用は、腫瘍の場所が外科医のためにマップされると終了する。具体的には、以前の切除手順は、治療を開始する前に、撮像システムからの患者の移動が必要であった。しかしながら、組織の一部の部分的切除または凝固とともに患者を移動させることは、切除すべき腫瘍の場所をかなり変化させる可能性がある。その結果、切除の際に、制御された精度を提供する、あらゆる可能性が排除される。
【0011】
また、磁気共鳴画像法システムは、画像内の腫瘍の温度を判定するように、および経時的にその温度の変化を判定するように、撮像シーケンスの修正によって使用できることも公知である。
【0012】
1990年4月3日に発行され、米国保健社会福祉省に譲渡された特許文献1(LeBiahan)は、組織の中の温度を判定するための方法を開示している。
【0013】
1994年2月8日に発行され、同じく米国保健社会福祉省に譲渡された特許文献2(Delannoy)は、外部の非侵襲加熱システムが磁気共鳴撮像システムのコイル内に装着された、癌の高熱治療用の装置を開示している。この開示は、推論的であり、外部加熱システムと連動した、温度のMRI測定の可能性に関係する初期の実験に関する。この特許の開示は、商業的に現実的な高熱治療システムには至らなかった。
【0014】
General Electricに譲渡された特許文献3および4は、熱の点源が、所定の熱分配を生成し、次いで、これを監視して、実際の熱分配が、加熱すべき領域の全体的な加熱を得るように、予測した熱分配に従うことを確保する、MRI制御の加熱システムに関する。ここでも、この特許を受けた配設は、商業的に現実的な高熱外科用システムに至らなかった。
【0015】
1987年6月9日に発行された、Memorial Hospital for Cancer and Allied Siseasesに譲渡され特許文献5(Fair)は、腫瘍が衝撃波を受ける、腫瘍の非外科的治療のための方法を開示している。この種類の治療は、衝撃波の効果を監視および制御する、監視システムを組み込んでいない。
【0016】
1998年10月20日に発行された、譲渡されていない特許文献6(Shaunnessey)は、光ファイバを支持するように設計された、特別に改良した内視鏡を開示している。光ファイバは、光エネルギーを放射し、エネルギーを導くように、長手方向移動して、その軸の周りで角度を付けて回転し得る。デバイスは、腫瘍を切除するために使用され、エネルギーは、切除すべき組織の蒸発を生じさせるのに十分になるように調整される。プロセス中に形成されるガスは、内視鏡を通した吸引によって除去される。MRIによって腫瘍の画像が得られ、その後、動作中にファイバが取るべき移動経路をプログラムするために使用される。ここでも、手順中に光ファイバの運動を制御するいかなるフィードバックもなく、動作は、全体的に初期の分析に依存する。この配設は、商業的または医学的な成功を収めなかった。
【0017】
1995年10月3日に発行された、Boston Scientific Corporationに譲渡された特許文献7(Lennox)は、光ファイバからの光エネルギーを腫瘍に照射する際に使用するためのデバイスを開示している。冷却液は、表面冷却を提供し、かつ表面損傷を防止し、一方で、増大したレベルのエネルギーをより深部の組織に印加することができるように、ファイバ内の管路を通して供給される。ここでも、この配設は、加熱効果のフィードバック制御を提供しない。
【0018】
1996年7月28日に発行された、MRC Systems GmbHに譲渡された特許文献8(Bille)も、脳腫瘍の照射に使用するレーザビームおよびレンズの特定の配設を開示している。具体的には、この配設は、光破断効果のために高速パルスレーザエネルギーを使用するが、エネルギーのフィードバック制御方法を開示していない。
【0019】
非特許文献1〜3は、全て、MRIによるエネルギーの印加中に腫瘍周辺の温度が監視される、ファイバを通したレーザから腫瘍への熱エネルギーの印加方法を開示している。非特許文献4と題された論文の中で、MRIフィードバック監視配設によるエネルギー制御を開示している。加えて、Voglの論文は、プローブ端部で組織を冷却するための、Somatex、Berlin、Germanyによって市販されている、冷却システムを開示している。このシステムは、外側チューブの中に装着されたファイバを含有する内側チューブによって形成される。冷却液は、連続ストリームで2つの管の間および内側チューブの内側を通過する。
【0020】
特定の応用では非常に有効であるが、脳腫瘍の治療に対するITTの使用は、周囲の正常な脳組織に対する損傷を回避するようにエネルギーを集束させることができないことにより、限定されている。これは、多くの脳腫瘍が非常に不規則な形状であるという事実によって複雑化される。
【0021】
集束レーザ間質内温熱療法(f−LITT)は、レーザに基づく温熱療法技術の次の一般的な改善である。具体的には、f−LITTは、熱エネルギー付与の正確な制御を可能にし、それによって、医師が、排他的に細胞の損傷を、事実上あらゆるサイズおよび形状の腫瘍塊内に含有させることを可能にする。しかしながら、他のITT治療システムと同様に、医師が、腫瘍塊内の治療デバイスの位置を正確に制御できるようにする装置の必要性が存在する。
【0022】
したがって、腫瘍塊等の標的に対して、細長い部材の長手方向および回転位置の両方を正確に制御することが可能である、細長い部材用の駆動システムを確立するという、これまで対処されなかった必要性が存在する。さらに、使用が簡単であり、正確かつ予測可能な結果をもたらす、細長い部材用の駆動システムが必要である。駆動システムは、好ましくは、レーザプローブ、カテーテル、内視鏡等が挙げられるが、これらに限定されない、あらゆる細長い医療デバイスと使用するために構造化されるべきである。駆動システムはまた、好ましくは、システムをMRIに適合するものにする材料から製造されるべきである。
【先行技術文献】
【特許文献】
【0023】
【特許文献1】米国特許第4,914,608号明細書
【特許文献2】米国特許第5,284,144号明細書
【特許文献3】米国特許第5,368,031号明細書
【特許文献4】米国特許第5,291,890号明細書
【特許文献5】米国特許第4,671,254号明細書
【特許文献6】米国特許第5,823,941号明細書
【特許文献7】米国特許第5,454,807号明細書
【特許文献8】米国特許第5,785,704号明細書
【非特許文献】
【0024】
【非特許文献1】Kahn他、Journal of Computer Assisted Tomography 18(4):519−532(7月/8月 1994年)
【非特許文献2】Kahn他、Journal of Magnetic Resonance Imaging 8:160−164(1998)
【非特許文献3】Vogl他、Radiology 209:381−385、1998
【非特許文献4】McNichols他、Lasers in Surgery and Medicine、34:48−55、2005、「MR Thermometry−Based Feedback Control of LITT at 980nm」
【発明の概要】
【課題を解決するための手段】
【0025】
本発明は、第1の回転ノブおよび第2の回転ノブとを有する基部ユニットと、ガイドレールに摺動可能に連結される従動子を含む従動子アセンブリと、長手方向運動ワイヤと、回転運動ワイヤとを含む、細長い部材の運動を制御するための駆動システムを提供することによって、上述の問題を解決する。従動子は、長手方向運動滑車と、回転運動滑車と、細長い部材がそれに取付可能であるように、細長い部材を受容するように構造化される整合要素とを含む。長手方向運動ワイヤは、第1のノブの回転が、従動子をガイドレールに沿って長手方向に駆動するように、第1の回転ノブを長手方向運動滑車に動作可能に連結する。回転運動ワイヤは、第2のノブの回転が、整合要素および取り付けられた細長い部材を回転させるように、第2の回転ノブを回転運動滑車に動作可能に連結する。
【図面の簡単な説明】
【0026】
【図1】図1は、指令ユニットと、従動子アセンブリと、従動子アセンブリに連結された細長い部材とを含む、本発明による、1つの例示的な駆動システムの斜視図である。
【図2A】図2Aは、従動子デバイスの長手方向運動を引き起こす第1のノブの回転を示す、図1の指令ユニットおよび従動子アセンブリの斜視図である。
【図2B】図2Bは、本発明による1つの例示的な代替の従動子アセンブリの斜視図である。
【図3】図3は、従動子デバイスの近位端上の整合デバイスの回転運動を引き起こす第2のノブの回転を示す、図1の指令ユニットおよび従動子アセンブリの斜視図である。
【図4】図4は、指令ユニットの内部構成要素を示すように指令ユニットのカバーを取り外した、指令ユニットの拡大斜視図である。
【図5】図5は、指令ユニット内の第1の張力ブロックアセンブリの側面図である。
【図6】図6は、従動子デバイスの内部構成要素を示すために従動子デバイスの筐体の一部分を除去した、従動子アセンブリの拡大斜視図である。
【図7】図7は、従動子デバイスが「中立」の開始位置で示される、本発明による駆動システムの斜視図である。
【図8A】図8Aは、従動子デバイスを長手方向かつ遠位方向に駆動する、指令ユニットの動作を示す、駆動システムの斜視図である。
【図8B】図8Bは、従動子デバイスの図8Aに示される長手方向かつ遠位方向の運動を示す、従動子アセンブリの下側の図である。
【図9A】図9Aは、従動子デバイスを長手方向かつ近位方向に駆動する、指令ユニットの動作を示す、駆動システムの斜視図である。
【図9B】図9Bは、従動子デバイスの図9Aに示される長手方向かつ近位方向の運動を示す、従動子アセンブリの下側の図である。
【図10】図10は、従動子デバイスの近位端から見た時に、整合デバイスを時計回り方向に回転させる、指令ユニットの動作を示す、駆動システムの斜視図である。
【図11】図11は、従動子デバイスの近位端から見た時に、整合デバイスを反時計回り方向に回転させる、指令ユニットの動作を示す、駆動システムの斜視図である。
【図12A】図12Aは、指令ユニットに連結された第1のロックデバイスの構造を示す図である。
【図12B】図12Bは、ロック解除位置にある第1のノブを示す、第1のロックデバイスの斜視図である。
【発明を実施するための形態】
【0027】
本発明は、細長い部材の定位位置決め用の駆動システムを対象とする。細長い部材には、例えば、細長いプローブ、カテーテル、内視鏡等が挙げられる。しかしながら、当業者は、本発明の駆動システムが、長手方向および/または回転方向の正確な制御を必要とする、あらゆる細長い部材と連動して使用されてもよいことを理解するであろう。
【0028】
例示的な一実施形態において、本発明による駆動システムは、腫瘍の治療のために患者の頭蓋骨の中に挿入できる、レーザプローブの正確な運動を制御するように使用されてもよい。具体的には、また、以下の開示および対応する図面に基づいて、当業者に明らかになるように、駆動システムは、プローブの長手方向および回転運動の両方を通して、腫瘍内の正確な場所にプローブの遠位端を位置付けるように動作されてもよい。
【0029】
以下、図1を参照すると、指令または基部ユニット12と、従動子アセンブリ14と、コネクタ13を有する電位差計アセンブリ15と、従動子アセンブリ14に連結された細長い部材16とを含む、1つの例示的な駆動システム10が示されている。以下に詳細に説明するように、指令ユニット12は、矢印Lによって示される細長い部材16の長手方向運動を引き起こすために構造化される第1のノブ18と、矢印Rによって示される細長い部材16の回転運動を引き起こすために構造化される第2のノブ20とを有する。したがって、当業者によって理解されるように、駆動システム10は、従動子アセンブリ14の近くに破線で示される一般的な塊M等の、特定の場所または要素に対する、またはその中の細長い部材16の正確な長手方向および角度位置を制御するように利用されてもよい。
【0030】
電位差計アセンブリ15は、従動子アセンブリ14に動作可能に連結され、細長い部材16の長手方向および角度位置に関するフィードバックを、コネクタ13を通して、コンピュータシステムまたは他の処理手段に提供するように構成されてもよい。駆動システム10の動作中に細長い部材16の長手方向および回転運動を表示するために、外部ディスプレイが、コンピュータシステムまたは処理手段に動作可能に連結されてもよい。代替として、当業者によって理解されるように、ディスプレイは、外部ディスプレイの代わりに(またはこれに加えて)、指令ユニット12上に提供されてもよい。例示的な一実施形態において、細長い部材16の長手方向運動は、ミリメートル等の任意の好適な単位を有する(「ゼロ」基準点に対する)数値的な値として表示されてもよい。さらに、細長い部材16の回転運動は、「ゼロ」基準点を囲む約+180度から約−180度の間の範囲の数字等の、あらゆる好適な手法で表示されてもよい。しかしながら、当業者は、細長い部材16の長手方向および回転運動が、本発明の対象とする範囲から逸脱することなく、数多くの他の方法で、かつ数多くの他の範囲で表示されてもよいことを理解するであろう。
【0031】
図2Aは、第1のノブ18の回転および対応する従動子アセンブリ14の長手方向運動を示す、指令ユニット12および従動子アセンブリ14の斜視図である。具体的には、指令ユニット12は、指令基部19と、指令カバー21とを含む。従動子アセンブリ14は、遠位端24と、近位端26とを有する従動子デバイス22を含む。従動子デバイス22は、従動子筐体27によって覆われ、ガイドレール28に動作可能に連結され、それによって、従動子デバイス22は、ガイドレール28の遠位端29と近位端31との間を駆動され得る。電位差計アセンブリ15は、ガイドレール28の遠位端29に位置付けられ、調整可能な軌道設定取付台等の、あらゆる好適な取付台または支持部に従動子アセンブリ14を取り付けるための取付手段17が、電位差計アセンブリ15に隣接する。図2Aに示されるように、あらゆる好適な取付手段が使用されてもよいが、取付手段17は、取付手段が取付台または支持部にクリップできるように構造化される、「クリップ」型締結具を含む。
【0032】
図2Aにおいて、従動子アセンブリ14は、ガイドレールの遠位端に隣接する電位差計アセンブリと、「クリップ」型締結具を含む取付手段とを含むように示されているが、本発明の対象とする範囲から逸脱することなく、修正が行われてもよい。例えば、図2Bに示される従動子アセンブリ14Aは、本発明による従動子アセンブリの代替の例示的な一実施形態である。特に、従動子アセンブリ14Aは、概して、従動子アセンブリ14の中のそれらに類似した構成要素を含む。しかしながら、電位差計アセンブリ15Aは、ガイドレール28Aの遠位端の代わりに、従動子デバイス22Aに対向するガイドレール28Aの側に位置付けられる。加えて、取付手段17は、上述の調整可能な軌道設定取付台等の取付台または支持部内で受容されるように構造化されてもよい略管状の部材を有する、代替の取付手段17Aと置き換えられている。したがって、当業者によって理解されるように、従動子アセンブリの数多くの代替の構成が意図される。
【0033】
図2Aの従動子アセンブリ14に戻ると、従動子デバイス22の近位端26は、それに連結されて細長い部材16を受容するように構造化される、回転可能な整合デバイス30を含む。図2Aにおいて、指令ユニット12および従動子アセンブリ14のより明瞭な動作の図を提供するように、細長い部材16を省略した。しかしながら、当業者によって理解されるように、細長い部材16は、細長い部材16の長手方向および回転位置を制御するために、従動子デバイス22の長手方向運動および整合デバイス30の回転運動が、細長い部材16に直接的に変換されるように、回転可能な整合デバイス30内に固定されてもよい。
【0034】
概して図2Aに示されるように、第1のノブ18を矢印32Aによって示される方向に回転させることで、従動子デバイス22は、矢印32Bによって示される方向に、ガイドレール28に沿って、長手方向に駆動されることになり得る。この長手方向運動は、破線で示される従動子デバイス22’によって示される。同様に、第1のノブ18を矢印34Aによって示される方向に回転させることで、従動子デバイス22は、矢印34Bによって示される方向に、ガイドレール28に沿って、長手方向に駆動されることになり得る。したがって、ユーザは、第1のノブ18が回転させられた量、ならびにそれが回転させられた方向に基づいて、ガイドレール28に沿って、従動子デバイス22の正確な長手方向位置を制御し得る。
【0035】
図3は、第2のノブ20の回転、および従動子デバイス22の近位端26上の整合デバイス30の対応する回転運動を示す、指令ユニット12および従動子アセンブリ14の斜視図である。上述のように、細長い部材16は、整合デバイス30を通して挿入可能であり、かつそこに固定され得るので、整合デバイス30の回転運動は、細長い部材16の回転位置および配向を制御するように、細長い部材16を同等の量だけ回転させ得る。
【0036】
概して図3に示されるように、第2のノブ20を矢印36Aによって示される方向に回転させることで、整合デバイス30は、矢印36Bによって示される方向に、従動子デバイス22に関して回転させられることになり得る。この回転運動は、破線に示される整合デバイス30’によって示される。同様に、第2のノブ20を矢印38Aによって示される方向に回転させることで、整合デバイス30は、矢印38Bによって示される方向に、従動子デバイス22に関して回転させられることになり得る。したがって、ユーザは、第2のノブ20が回転させられた量、ならびにそれが回転させられた方向に基づいて、従動子デバイス22に関する整合デバイス30の正確な回転位置を制御し得る。
【0037】
図4は、指令ユニット12の内部構成要素を示すように指令カバー21を取り外した、指令ユニット12の拡大斜視図である。具体的には、指令ユニット12は、第1のノブ歯車42を有する第1の内部ノブ40と、第2のノブ歯車46を有する第2の内部ノブ44と、第1のスプール50および第2のスプール52を有する第1のドライブスプール軸48と、第1のスプール56および第2のスプール58を有する第2のスプール軸54と、第1のドライブスプール軸48に付随する一対のワイヤシース60と、第2の駆動スプール軸54に付随する一対のワイヤシース62とを含む。第1の内部ノブ40は、第1のノブ18の中の開口を通して、第1の内部ノブ40の端部の中のねじ付き陥凹部の中に挿入されたボルト64を介して、第1のノブ18に連結されてもよい。同様に、第2の内部ノブ44は、第2のノブ20の中の開口を通して、第2の内部ノブ44の端部の中のねじ付き陥凹部に挿入されたボルト66を介して、第2のノブ20に連結されてもよい。
【0038】
図4に示されるように、第2の駆動スプール軸54は、第2の内部ノブ44の第2のノブ歯車46の中の略正方形の開口70によって受容されて、これと噛合するように構造化される、断面が略正方形である端部分68を含んでもよい。「略正方形」という句は、図4に示されるように、「鋭い」角部および「丸みのある」角部の両方を有する実施形態を含むことを意図している。例示的な一実施形態において、正方形開口70は、第2のノブ歯車46と端部分68との間に実質的に隙間がない接続が形成されるように、端部分68とほぼ同じ寸法を有してもよい。第2の駆動スプール軸54の端部分68と正方形開口70との組み合わせは、ユーザによる第2のノブ20の回転を、第2の駆動スプール軸54へ伝達できるようにする。同様に、第1の駆動スプール軸48は、第1の内部ノブ40の第1のノブ歯車42の略正方形の開口(図示せず)によって受容されて、これと噛合するように構造化される、断面が略正方形である端部分72を含んでもよい。ここでも、正方形開口は、第1のノブ歯車42と端部分72との間に実質的に隙間がない接続が形成されるように、端部分72とほぼ同じ寸法を有してもよい。
【0039】
第1および第2の駆動スプール軸48および54が、それぞれ、略正方形開口と噛合する略正方形の端部分72および68を含むものとして説明してきたが、当業者は、駆動スプール軸が、代替的に、例えば三角形、長方形、六角形等を含む数多くの他の断面形状を有する端部分を含んでもよいことを理解するであろう。したがって、ノブ歯車から駆動スプール軸に回転運動を伝達することができるようになる、あらゆる形状の組み合わせが意図され、かつ本発明の対象とする範囲の範囲内にある。
【0040】
上記に説明された第1のノブ歯車42への接続に加えて、第1の駆動スプール軸48が、第1のスプール軸頂部キャリア74および駆動軸固定具76によって指令ユニット12内に含有されてもよい。同様に、上記に説明された第2のノブ歯車46への接続に加えて、第2の駆動スプール軸54が、第2のスプール軸頂部キャリア78および駆動軸固定具76によって指令ユニット12内に含有されてもよい。当業者によって理解されるように、第1のスプール軸頂部キャリア74、第2のスプール軸頂部キャリア78、および駆動軸固定具76は、第1および第2の駆動スプール軸48および54を含有し、かつ軸が回転できるようにするためのブッシュを形成するように、指令基部19と一緒に機能する。組立中に、第1および第2の駆動スプール軸48および54が指令ユニット12内に適切に位置付けられると、第1および第2のスプール軸頂部キャリア74および78は、どちらも、駆動軸固定具76とともに、指令基部19に固定されてもよい。例示的な一実施形態において、第1のスプール軸頂部キャリア74、第2のスプール軸頂部キャリア78、および駆動軸固定具76は、ねじ80で指令基部19に固定されるが、当業者によって理解されるように、ボルトまたは接着剤等のあらゆる好適な締結手段が使用されてもよい。当業者はまた、第1および第2の駆動スプール軸48および54は、駆動軸固定具76の使用が必要でなくなるように、第1および第2のスプール軸頂部キャリア74および78とともに形成されたブッシュによって十分に含有されてもよいことを理解するであろう。したがって、代替の一実施形態において、駆動軸固定具76は、本発明の精神および範囲から逸脱することなく、指令ユニット12から除去されてもよい。
【0041】
図4に示されるように、駆動システム10はさらに、第1の駆動スプール軸48に動作可能に取り付けられる長手方向運動ワイヤ82と、第2の駆動スプール軸54に動作可能に取り付けられる回転運動ワイヤ84とを含む。具体的には、長手方向運動ワイヤ82の第1の端部86は、第1の駆動スプール軸48に付随するワイヤシース60のうちの1つから延在して、第1のスプール50の周りに巻き付き、一方で、長手方向運動ワイヤ82の第2の端部88は、ワイヤシース60のうちの他の1つから延在して、第2のスプール52の周りに巻き付く。図4にさらに示されるように、回転運動ワイヤ84の第1の端部92は、第2の駆動スプール軸54に付随するワイヤシース62のうちの1つから延在して、第1のスプール56の周りに巻き付き、一方で、回転運動ワイヤ84の第2の端部94は、ワイヤシース62のうちの他の1つから延在して、第2のスプール58の周りに巻き付く。
【0042】
第1および第2のノブ18および20が、使用されていない時に意図せずに回転させられて、ロック位置にされることを防止するために、駆動システム10はまた、第1および第2のロックデバイス85および87を含む。具体的には、第1のロックデバイス85は、第1のノブ18をロックするために、第1のノブ歯車42に係合するように構造化され、一方で、第2のロックデバイス87は、第2のノブ20をロックするために、第2のノブ歯車46に係合するように構造化される。したがって、第1および第2のロックデバイス85および87は、細長い部材16の長手方向および回転位置が意図せずに変化させられ得る可能性を最小化する、「安全」デバイスとして機能する。以下にさらに詳細に論じられるように、第1のロックデバイス85を係脱して、第1のノブ18を回転させることができるようにし、したがって、ユーザが、細長い部材16の長手方向位置を操作できるようにするために、第1のノブ18と指令基部19との間に配置された第1のばね89の力に逆らって、軸方向力を第1のノブ18に印加しなければならない。同様に、第2のロックデバイス87を係脱して、第2のノブ20を回転させることができるようにし、したがって、ユーザが、細長い部材16の回転位置を操作できるようにするために、第2のノブ20と指令基部19との間に配置された第2のばね91の力に逆らって、軸方向力を第2のノブ20に印加しなければならない。
【0043】
随意に、図4に示されるように、第1の駆動スプール軸48に付随する一対のワイヤシース60は、第1の張力ブロックアセンブリ90に連結されてもよく、一方で、第2の駆動スプール軸54に付随する一対のワイヤシース62は、第2の張力ブロックアセンブリ96に連結されてもよい。特に、第1および第2の張力ブロックアセンブリ90および96は、本発明の不要な構成要素であるが、張力ブロックアセンブリは、ワイヤがそれらのそれぞれの駆動スプール軸上に巻回およびそれらから巻出される時に、それぞれ、長手方向および回転運動ワイヤ82および84にかかる張力を軽減するように機能する。以下、張力ブロックアセンブリの例示的な一実施形態を、図5を参照して説明する。
【0044】
具体的には、図5は、第1の張力ブロックアセンブリ90の側面を示す図である。第1の張力ブロックアセンブリ90は、概して、シースコネクタブロック97と、シースコネクタブロックホルダ98と、シースコネクタブロック97を通して開口の中に挿入されるように構造化される、ポスト部材99と、ばね100とを含む。シースコネクタブロックホルダ98は、シースコネクタブロック97の中で一対のスロット102によって受容されるように構造化される、一対のフランジ101を含む。締結具103は、シースコネクタブロック97の運動を制限して、フランジ101がスロット102から除去されるのを防止するために、シースコネクタブロック97をポスト部材99に連結する。駆動システム10の動作中に、シースコネクタブロック97は、ワイヤが第1の駆動スプール軸48上に巻回およびそこから巻出される時に、長手方向運動ワイヤ82にかかる張力を軽減するために、必要に応じて矢印95によって示される方向に移動してもよい。したがって、シースコネクタブロック97は、長手方向運動ワイヤ82が指令ユニット12との間を進行する方向と実質的に一致する方向に進行するように構造化される。これは、駆動システムの動作中に長手方向運動ワイヤ82が壊れる可能性を最小化し、かつ第1のノブ18のより滑らかな回転を提供する。当業者は、第1の張力ブロックアセンブリ90に着目した上述の考察が、単に例示の目的のためであり、限定するためのものではなく、第2の張力ブロックアセンブリ96が、同じような手法で設計されてもよいことを理解するであろう。
【0045】
当業者によって理解されるように、数多くの代替の張力ブロックアセンブリが指令ユニット12の中に組み込まれてもよい。例えば、1つの代替の張力ブロックアセンブリにおいて、シースコネクタブロックは、長手方向運動ワイヤ82の運動方向と実質的に一致する方向に進行するのではなく、代わりに、シースコネクタブロックが、長手方向運動ワイヤ82の運動方向に実質的に垂直である方向に進行するように設計されてもよい。したがって、ワイヤが指令ユニット12との間を進行する時に長手方向運動ワイヤ82にかかる張力を最小化するために、長手方向運動ワイヤ82が、シースコネクタブロック上に「乗って」、それによって誘導される時に、シースコネクタブロックに動作可能に連結されたポストおよびばねは、ブロックが、長手方向運動ワイヤ82の進行方向に実質的に垂直な方向に進行できるようにする。
【0046】
図6は、従動子デバイス22の内部構成要素を示すために従動子の筐体27の一部分を除去した、従動子アセンブリ14の拡大斜視図である。具体的には、従動子デバイス22は、レール従動子部材104と、長手方向運動滑車105と、回転運動滑車106と、第1の遊び滑車107と、第2の遊び滑車108と、細長い部材16を受容するための管状部材109とを含む。図6に示されるように、レール従動子部材104は、従動子デバイス22がレールに沿って長手方向に移動する時に、ガイドレール28によって受容されて、その中に乗るように構造化される。長手方向運動滑車105は、長手方向運動ワイヤ82を含有する一対のワイヤシース60に隣接して位置付けられてもよい。長手方向運動ワイヤ82は、ワイヤシース60のうちの第1の1つから延在し、長手方向運動滑車105の周りに巻き付き、そして再び、指令ユニット12に戻るワイヤシース60のうちの第2の1つに入る。
【0047】
回転運動滑車106は、管状部材109および整合デバイス30に連結されるか、またはこれらと一体的に形成される。したがって、回転運動滑車106が回転運動ワイヤ84によって回転させられる時に、回転運動が、管状部材109および整合デバイス30に伝達される。第1の遊び滑車107は、ワイヤシース62のうちの第1の1つに隣接して位置付けられてもよく、一方で、第2の遊び滑車108は、ワイヤシース62のうちの第2の1つに隣接して位置付けられてもよい。回転運動ワイヤ84は、回転運動滑車106に到達してその周りに巻き付く前に、ワイヤシース62のうちの第1の1つから延在して、第1の遊び滑車107の周りに巻き付く。次いで、回転運動ワイヤ84は、指令ユニット12に戻るワイヤシース62のうちの第2の1つに再び入る前に、第2の遊び滑車108から延在してその周りに巻き付く。
【0048】
図7は、「中立」の開始位置で示される従動子アセンブリ14の従動子デバイス22を伴う、駆動システム10の斜視図である。ガイドレール28の遠位端29と近位端31とのほぼ中間にある、この従動子デバイス22の中立の開始位置は、単に例示の目的のためであり、限定するために画定されたものではない。したがって、以下、駆動システム10の動作は、図7に示される中立の開始位置を参照して説明される。しかしながら、当業者は、開始位置が、本発明の対象とする範囲から逸脱することなく、ガイドレール28に沿った他のいくつかの場所として画定されてもよいことを理解するであろう。
【0049】
図8Aは、従動子デバイス22をガイドレール28の遠位端29に向かって長手方向に駆動する、指令ユニット12動作を示す、駆動システム10の斜視図である。具体的には、図8Aに示されるように、第1のノブ18を矢印34Aによって示される方向に回転させることで、従動子デバイス22を、図7に示される中立の開始位置から、ガイドレール28の遠位端29に隣接する新しい位置に、矢印34Bによって示される方向に、長手方向に駆動する。図1を参照すると、従動子デバイス22を、矢印34Bによって示される方向に、長手方向に駆動することの効果は、細長い部材16を塊Mの中に(または、細長い部材16が、既に塊内にい続けられていた場合は、さらに塊Mの中に)駆動することである。
【0050】
図4を参照して先に論じたように、第1のノブ18が矢印34Aによって示される方向に回転させられる時に、第1の駆動スプール軸48の端部分72と第1の内部ノブ40の第1のノブ歯車42との間の接続により、第1の駆動スプール軸48も類似した方向に回転させられる。その結果、長手方向運動ワイヤ82の第1の端部86は、第1の駆動スプール軸48の第1のスプール50の周りにさらに巻回され、一方で、長手方向運動ワイヤ82の第2の端部88は、第2のスプール52からさらに巻出される。それに応じて、当業者によって理解されるように、長手方向運動ワイヤ82の第1の端部86および第2の端部88が、それぞれ、第1および第2のスプール50および52上に巻回およびそれらから巻出されている間に、長手方向運動滑車105は、図8Aにおいて矢印112によって示される方向に回転する。図8Bを参照してより詳細に論じられるように、矢印112によって示される方向の長手方向運動滑車105の回転は、従動子デバイス22の、図8Aに示される遠位位置に長手方向への駆動を引き起こす。
【0051】
図8Bは、従動子アセンブリ14の下側114を示す図である。図8Bに示されるように、従動子アセンブリ14はさらに、好適な接続手段118を介して、長手方向運動滑車105に動作可能に連結される、従動歯車116を含む。接続手段118は、図8Aを参照して説明される長手方向運動滑車105の運動を、従動歯車116に連結するように構造化される。したがって、例えば、長手方向運動滑車105が図8Aの矢印112によって示される方向に回転させられる時に、従動歯車116が接続手段118を介して運動滑車105に動作可能に連結されているため、それに応じて従動歯車116も、112の方向に回転させられる。
【0052】
従動子アセンブリ14の下側114は、従動歯車116上の対応する複数の歯124と噛合するように構造化される複数の歯122を有する、ガイドレール28の歯車トラック部分120を示す。したがって、従動歯車116が長手方向運動滑車105によって回転させられている時に、従動歯車116上の歯124は、従動歯車116、したがって、従動子デバイス22を歯車トラック120に沿って長手方向に駆動するために、歯車トラック120上の歯122に係合する。
【0053】
図9Aは、従動子デバイス22をガイドレール28の近位端31に向かって長手方向に駆動する、指令ユニット12の動作を示す、駆動システム10の斜視図である。具体的には、図9Aに示されるように、第1のノブ18を矢印32Aによって示される方向に回転させることで、従動子デバイス22を、図7に示される中立の開始位置から(または、例えば、図8Aに示される位置から)、ガイドレール28の近位端31に隣接する新しい位置に、矢印32Bによって示される方向に、長手方向に駆動する。図1を参照すると、従動子デバイス22を、矢印32Bによって示される方向に、長手方向に駆動すること効果は、細長い部材16を塊Mから引き出すことであり得る。
【0054】
ここでも、第1のノブ18を矢印32Aによって示される方向に回転させることで、第1の駆動スプール軸48の類似した方向への回転を引き起こす。その結果、長手方向運動ワイヤ82の第2の端部88は、第1の駆動スプール軸48の第2のスプール52の周りにさらに巻回され、一方で、長手方向運動ワイヤ82の第1の端部86は、第1のスプール50からさらに巻出される。それに応じて、当業者によって理解されるように、長手方向運動ワイヤ82の第1の端部86および第2の端部88が、それぞれ、第1および第2のスプール50および52から巻出およびそれらの上に巻回されている間に、長手方向運動滑車105は、図9Aにおいて矢印126によって示される方向に回転する。矢印126によって示される方向の長手方向運動滑車105の回転は、従動子デバイス22の、図9Aに示される近位位置への長手方向の駆動を引き起こす。
【0055】
図9Bは、従動子デバイス22がガイドレール28の近位端31に駆動された後の、従動子アセンブリ14のガイドレール部分28の下側114を示す図である。接続手段118が長手方向運動滑車105の運動を従動歯車116に連結するので、矢印126によって示される方向の滑車105の回転は、従動歯車116の類似した方向への対応する回転を引き起こす。具体的には、従動歯車116が長手方向運動滑車105によって回転させられている時に、従動歯車116上の歯124は、従動歯車116、したがって、従動子デバイス22を、歯車トラック120に沿って、図9Bに示される近位位置に長手方向に駆動するために、歯車トラック120上の歯122に係合する。
【0056】
図10は、従動子デバイス22の近位端26から見た時に、整合デバイス30を時計回り方向に回転させる、指令ユニット12の動作を示す、駆動システム10の斜視図である。具体的には、図10に示されるように、第2のノブ20を矢印36Aによって示される方向に回転させることで、整合デバイス30は、図7に示される中立の開始位置から、矢印36Bによって示される方向に回転する。図1を参照すると、整合デバイス30を、矢印36Bによって示される方向に回転させることの効果は、静止した状態である塊Mに対して、取り付けられた細長い部材16を回転させることである。図10に示されるように、整合デバイス30は、時計回り方向にほぼ90度回転させられている。しかしながら、当業者は、整合デバイス30を、ゼロから360度の間の任意の量だけ回転させてもよいことを理解するであろう。
【0057】
図4を参照して先に論じたように、第2のノブ20が矢印36Aによって示される方向に回転させられる時に、第2の駆動スプール軸54の端部分68と第2の内部ノブ44の第2のノブ歯車46との間の接続により、第2の駆動スプール軸54も類似した方向に回転させられる。その結果、回転運動ワイヤ84の第1の端部92は、第2の駆動スプール軸54の第1のスプール56の周りにさらに巻回され、一方で、回転運動ワイヤ84の第2の端部94は、第2のスプール58からさらに巻出される。それに応じて、当業者によって理解されるように、回転運動ワイヤ84の第1の端部92および第2の端部94が、それぞれ、第1および第2のスプール56および58上に巻回およびそれらから巻出されている間に、回転運動滑車106は、図10において矢印36Bによって示される方向に回転する。回転運動滑車106は、整合デバイス30に連結、またはこれと一体的に形成されるので、整合デバイス30も、矢印36Bによって示される方向に回転する。
【0058】
図11は、従動子デバイス22の近位端26から見た時に、整合デバイス30を反時計回り方向に回転させる、指令ユニット12の動作を示す、駆動システム10の斜視図である。具体的には、図11に示されるように、第2のノブ20を矢印38Aによって示される方向に回転させることで、整合デバイス30は、図10に示される位置から図7に示される中立の開始位置に、矢印38Bによって示される方向に回転する。整合デバイス30は、反時計回りにほぼ90度だけ回転させられたように示されているが、当業者は、整合デバイス30が、本発明の対象とする範囲から逸脱することなく、異なる量だけ回転させられるように、第2のノブ20が操作されてもよいことを理解するであろう。
【0059】
ここでも、第2のノブ20を矢印38Aによって示される方向に回転させることで、第2の駆動スプール軸54の類似した方向への回転を引き起こす。その結果、回転運動ワイヤ84の第2の端部94は、第2の駆動スプール軸54の第2のスプール58の周りにさらに巻回され、一方で、回転運動ワイヤ84の第1の端部92は、第1のスプール56からさらに巻出される。それに応じて、当業者によって理解されるように、回転運動ワイヤ84の第1の端部92および第2の端部94が、それぞれ、第1および第2のスプール56および58から巻出およびそれらの上に巻回されている間に、回転運動滑車106は、図11において矢印38Bによって示される方向に回転する。回転運動滑車106へのその取り付けにより、整合デバイス30も、矢印38Bによって示される方向に回転させられる。
【0060】
図12Aは、図4を参照して上述した、第1のノブ18で動作するように構造化される、第1の係止デバイス85を示す図である。指令ユニット12はまた、第2のノブ20で動作するように構造化される、第2の係止デバイス87を含むが、第1および第2の係止デバイス85および87は、どちらも、実質的に同一に動作する。したがって、第1の係止デバイス85が詳細に示されて説明されるが、その議論は、同様に第2の係止デバイス87にも適用される。
【0061】
図12Aに示されるように、第1の係止デバイス85は、指令基部19の内面に係合するように構造化される底面142と、複数の係止歯148を伴う湾曲部分146を有する頂面144とを含む。係止デバイス85は、開口149を通して挿入される締結具等の、あらゆる好適な手段によって指令基部19に連結されてもよい。別の例示的実施形態において、係止デバイス85は、指令基部19と一体的に形成、または接着剤で指令基部19に連結されてもよい。係止歯148は、第1のノブ18が「係止」位置にある時に、第1のノブ歯車42上の複数のノブ歯車歯150に係合するように構造化される。具体的には、第1のノブ18は、通常、第1のばね89によって係止位置に付勢されており、また、以前に説明した手法で細長い部材16の長手方向位置を調整する前に、図12Bに示されるように、「係止解除」位置に第1のばね89のばね力に逆らって移動させなければならない。
【0062】
図12Bは、係止解除位置にある第1のノブ18を示す、第1のノブ18および第1の係止デバイス85の斜視図である。具体的には、図2A、8A、および9Aを参照して以前に説明したように、第1のノブ18を矢印32Aによって示される方向または矢印34Aによって示される方向のいずれかに回転させる前に、第1のノブ18を係止解除位置に移動させなければならない。第1のノブ18は、軸方向力Aを第1のノブ18に印加することによって、図12Aに示される係止位置から、図12Bに示される係止解除位置に移動させられ得、それによって、第1の係止デバイス85上の係止歯148から、第1のノブ歯車42上のノブ歯車歯150を係脱する。ノブ歯車歯150が係止歯148から係脱されると、ユーザは、軸方向力Aが保持されている限り、第1のノブ18を、矢印32Aおよび34Aによって示される方向に自由に回転させてもよい。細長い部材16の長手方向位置のさらなる操作がもはや必要でなくなった時、ユーザは、単に、軸方向力Aの印加を止めればよく、そして、第1のばね部材89は、ノブ歯車歯150を係止歯148との係合状態に戻すように押し込み、それによって、第1のノブ18のさらなる回転を防止する。当業者が理解するように、細長い部材16の長手方向位置は、軸方向力Aを第1のノブ18に再度印加してノブを回転させることによって、さらに操作されてもよい。
【0063】
図12にさらに示されるように、第1の駆動スプール軸48は、第1のスプール50に隣接する、第1の軸フランジ152と、第2のスプール52に隣接する、第2の軸フランジ154とを含んでもよい。具体的には、長手方向運動ワイヤ82の第2の端部88は、第2の軸フランジ154に沿って延在して、その端部分156に締結手段158で固定されてもよい。同様に、図12Bには示されていないが、長手方向運動ワイヤ82の第1の端部86は、第1の軸フランジ152に沿って延在して、その端部分160に締結手段162で固定されてもよい。
【0064】
当業者は、駆動システム10が、特定の方向の長手方向および回転運動をもたらす、第1および第2のノブ18および20の回転運動に関して説明されてきたが、該駆動システムは、ノブの回転が、本発明の対象とする範囲から逸脱することなく、代わりに、反対方向の運動をもたらしてもよいことを理解するであろう。したがって、ノブ18および20の操作の結果として、細長い部材16が移動する特定の方向は、本発明の必須構成要素ではない。
【0065】
本発明を好適な実施形態を参照して説明したが、当業者は、本発明の精神および範囲から逸脱することなく、形状および細部の変更が行われ得ることを認識するであろう。
(項目1)
細長い部材の運動を制御するための駆動システムであって、
第1の回転ノブと第2の回転ノブとを有する基部ユニットと、
ガイドレールに摺動可能に連結される従動子を含む従動子アセンブリであって、該従動子は、長手方向運動滑車と、回転運動滑車と、該細長い部材がそれに取付可能であるように、該細長い部材を受容するよう構造化される整合要素とを含む、従動子アセンブリと、
該第1のノブの回転が、該従動子を該ガイドレールに沿って長手方向に駆動するように、該第1の回転ノブを該長手方向運動滑車に動作可能に連結する、長手方向運動ワイヤと、
該第2のノブの回転が、該整合要素および取り付けられた細長い部材を回転させるように、該第2の回転ノブを該回転運動滑車に動作可能に連結する、回転運動ワイヤと
を備える、駆動システム。
(項目2)
上記第1のノブは、第1の駆動スプール軸に動作可能に連結され、上記第2のノブは、第2の駆動スプール軸に動作可能に連結される、項目1に記載の駆動システム。
(項目3)
上記長手方向運動ワイヤは、上記第1の駆動スプール軸を上記長手方向運動滑車に動作可能に連結し、上記回転運動ワイヤは、上記第2の駆動スプール軸を上記回転運動滑車に動作可能に連結し、上記第2のノブの回転は、上記整合要素の回転運動を引き起こす、該回転運動ワイヤの長手方向運動を生じさせる、項目2に記載の駆動システム。
(項目4)
上記基部ユニットはさらに、
第1のノブ歯車を有する第1の内部ノブであって、該第1の内部ノブは、上記第1の回転ノブを上記第1の駆動スプール軸に動作可能に連結する、第1の内部ノブと、
第2のノブ歯車を有する第2の内部ノブであって、該第2の内部ノブは、上記第2の回転ノブを上記第2の駆動スプール軸に動作可能に連結する、第2の内部ノブと
を備える、項目2に記載の駆動システム。
(項目5)
上記第1の内部ノブはさらに、複数のノブ歯車の歯を有する、第1のノブ歯車を備える、項目4に記載の駆動システム。
(項目6)
上記第1の駆動スプール軸は、断面がほぼ正方形である端部分を含む、項目5に記載の駆動システム。
(項目7)
上記第1の内部ノブの上記第1のノブ歯車は、上記第1の駆動スプール軸の断面がほぼ正方形である端部分を受容するように構造化される開口を含む、項目6に記載の駆動システム。
(項目8)
上記基部ユニットに連結される係止デバイスをさらに備え、該係止デバイスは、上記第1の回転ノブが係止位置にあるときに、上記複数のノブ歯車の歯と係合可能である複数の係止歯を有する、項目5に記載の駆動システム。
(項目9)
上記第1の駆動スプール軸は、上記長手方向運動ワイヤの第1の端部を受容するように構造化される第1のスプールと、該長手方向運動ワイヤの第2の端部を受容するように構造化される第2のスプールとを備える、項目2に記載の駆動システム。
(項目10)
上記第2の駆動スプール軸は、上記回転運動ワイヤの第1の端部を受容するように構造化される第1のスプールと、該回転運動ワイヤの第2の端部を受容するように構造化される第2のスプールとを備える、項目9に記載の駆動システム。
(項目11)
上記従動子はさらに、上記回転運動ワイヤを係合するための、上記回転運動滑車に隣接して位置付けられる、1つ以上の遊び滑車部材を備える、項目1に記載の駆動システム。
(項目12)
上記従動子アセンブリはさらに、
上記長手方向運動滑車に連結され、複数の歯車の歯を含む、従動歯車と、
該従動歯車の、歯車の歯に係合するように構造化される複数の歯車トラックの歯を有する、歯車トラックと
を備える、項目1に記載の駆動システム。
(項目13)
上記基部ユニットと上記従動子アセンブリとの間に延在し、その中で上記長手方向運動ワイヤを受容するように構造化される、第1の一対のワイヤシースと、
上記基部ユニットと上記従動子アセンブリとの間に延在し、その中で上記回転運動ワイヤを受容するように構造化される、第2の一対のワイヤシースと
をさらに備える、項目1に記載の駆動システム。
(項目14)
上記第1の一対のワイヤシースに取付可能である、第1の張力ブロックアセンブリと、
上記第2の一対のワイヤシースに取付可能である、第2の張力ブロックアセンブリと
をさらに備える、項目13に記載の駆動システム。
(項目15)
上記従動子アセンブリはさらに、上記長手方向運動滑車に連結され、上記従動子を上記ガイドレールに沿って長手方向に駆動するために歯車トラックに沿って移動可能である、従動歯車を備える、項目1に記載の駆動システム。
(項目16)
細長い部材の運動を制御するための方法であって、
駆動システムを提供することであって、該駆動システムは、
第1の回転ノブと、第2の回転ノブとを有する、基部ユニットと、
ガイドレールに摺動可能に連結される従動子を含む、従動子アセンブリであって、該従動子は、長手方向運動滑車と、回転運動滑車と、該細長い部材がそれに取付可能であるように、該細長い部材を受容するよう構造化される整合要素とを含む、従動子アセンブリと、
該第1の回転ノブを該長手方向運動滑車に動作可能に連結する、長手方向運動ワイヤと、
該第2の回転ノブを該回転運動滑車に動作可能に連結する、回転運動ワイヤと
を備える、ことと、
該従動子を該ガイドレールに沿って長手方向に駆動するように、該第1の回転ノブを回転させることと、
該整合要素および取り付けられた細長い部材を回転させるように、該第2の回転ノブを回転させることと
を含む、方法。
(項目17)
上記従動子アセンブリはさらに、
上記長手方向運動滑車に連結され、複数の歯車の歯を含む、従動歯車と、
上記従動歯車の上記歯車の歯に係合するように構造化される複数の歯車トラックの歯を有する、歯車トラックと、
を備える、項目16に記載の方法。
(項目18)
上記第1のノブは、第1の駆動スプール軸に動作可能に連結され、上記第2のノブは、第2の駆動スプール軸に動作可能に連結される、項目16に記載の方法。
(項目19)
上記長手方向運動ワイヤは、上記第1の駆動スプール軸を上記長手方向運動滑車に動作可能に連結し、上記回転運動ワイヤは、上記第2の駆動スプール軸を上記回転運動滑車に動作可能に連結し、上記第2のノブの回転は、上記整合要素の回転運動を引き起こす、上記回転運動ワイヤの長手方向運動を生じさせる、項目18に記載の方法。
(項目20)
上記ガイドレールに沿って上記従動子を駆動するように上記ノブを回転させる前に、上記第1の回転ノブを係止位置から係止解除位置に移動させることをさらに含む、項目16に記載の方法。
(項目21)
上記整合要素および取り付けられた細長い部材を回転させるように上記ノブを回転させる前に、上記第2の回転ノブを係止位置から係止解除位置に移動させることをさらに含む、項目20に記載の方法。
(項目22)
上記第1および第2の回転ノブはそれぞれ、上記ノブが上記係止位置にあるときに、上記基部ユニットの対応する複数の係止歯に係合するように構造化される、複数のノブ歯車の歯を含む、項目21に記載の方法。
(項目23)
上記第1および第2の回転ノブは、実質的に軸方向の力を上記ノブに適用することによって、上記係止位置から上記係止解除位置に移動させられてもよい、項目22に記載の方法。
(項目24)
上記第1および第2の回転ノブの上記ノブ歯車の歯は、上記ノブが上記係止解除位置に移動させられたときに、上記対応する係止歯から係脱される、項目23に記載の方法。
【特許請求の範囲】
【請求項1】
細長い部材の運動を制御するための駆動システムであって、
第1の回転ノブと第2の回転ノブとを有する基部ユニットと、
ガイドレールに摺動可能に連結される従動子を含む従動子アセンブリであって、該従動子は、長手方向運動滑車と、回転運動滑車と、該細長い部材がそれに取付可能であるように、該細長い部材を受容するよう構造化される整合要素とを含む、従動子アセンブリと、
該第1のノブの回転が、該従動子を該ガイドレールに沿って長手方向に駆動するように、該第1の回転ノブを該長手方向運動滑車に動作可能に連結する、長手方向運動ワイヤと、
該第2のノブの回転が、該整合要素および取り付けられた細長い部材を回転させるように、該第2の回転ノブを該回転運動滑車に動作可能に連結する、回転運動ワイヤと
を備える、駆動システム。
【請求項2】
前記第1のノブは、第1の駆動スプール軸に動作可能に連結され、前記第2のノブは、第2の駆動スプール軸に動作可能に連結される、請求項1に記載の駆動システム。
【請求項3】
前記長手方向運動ワイヤは、前記第1の駆動スプール軸を前記長手方向運動滑車に動作可能に連結し、前記回転運動ワイヤは、前記第2の駆動スプール軸を前記回転運動滑車に動作可能に連結し、前記第2のノブの回転は、前記整合要素の回転運動を引き起こす、該回転運動ワイヤの長手方向運動を生じさせる、請求項2に記載の駆動システム。
【請求項4】
前記基部ユニットはさらに、
第1のノブ歯車を有する第1の内部ノブであって、該第1の内部ノブは、前記第1の回転ノブを前記第1の駆動スプール軸に動作可能に連結する、第1の内部ノブと、
第2のノブ歯車を有する第2の内部ノブであって、該第2の内部ノブは、前記第2の回転ノブを前記第2の駆動スプール軸に動作可能に連結する、第2の内部ノブと
を備える、請求項2に記載の駆動システム。
【請求項5】
前記第1の内部ノブはさらに、複数のノブ歯車の歯を有する、第1のノブ歯車を備える、請求項4に記載の駆動システム。
【請求項6】
前記第1の駆動スプール軸は、断面がほぼ正方形である端部分を含む、請求項5に記載の駆動システム。
【請求項7】
前記第1の内部ノブの前記第1のノブ歯車は、前記第1の駆動スプール軸の断面がほぼ正方形である端部分を受容するように構造化される開口を含む、請求項6に記載の駆動システム。
【請求項8】
前記基部ユニットに連結される係止デバイスをさらに備え、該係止デバイスは、前記第1の回転ノブが係止位置にあるときに、前記複数のノブ歯車の歯と係合可能である複数の係止歯を有する、請求項5に記載の駆動システム。
【請求項9】
前記第1の駆動スプール軸は、前記長手方向運動ワイヤの第1の端部を受容するように構造化される第1のスプールと、該長手方向運動ワイヤの第2の端部を受容するように構造化される第2のスプールとを備える、請求項2に記載の駆動システム。
【請求項10】
前記第2の駆動スプール軸は、前記回転運動ワイヤの第1の端部を受容するように構造化される第1のスプールと、該回転運動ワイヤの第2の端部を受容するように構造化される第2のスプールとを備える、請求項9に記載の駆動システム。
【請求項11】
前記従動子はさらに、前記回転運動ワイヤを係合するための、前記回転運動滑車に隣接して位置付けられる、1つ以上の遊び滑車部材を備える、請求項1に記載の駆動システム。
【請求項12】
前記従動子アセンブリはさらに、
前記長手方向運動滑車に連結され、複数の歯車の歯を含む、従動歯車と、
該従動歯車の、歯車の歯に係合するように構造化される複数の歯車トラックの歯を有する、歯車トラックと
を備える、請求項1に記載の駆動システム。
【請求項13】
前記基部ユニットと前記従動子アセンブリとの間に延在し、その中で前記長手方向運動ワイヤを受容するように構造化される、第1の一対のワイヤシースと、
前記基部ユニットと前記従動子アセンブリとの間に延在し、その中で前記回転運動ワイヤを受容するように構造化される、第2の一対のワイヤシースと
をさらに備える、請求項1に記載の駆動システム。
【請求項14】
前記第1の一対のワイヤシースに取付可能である、第1の張力ブロックアセンブリと、
前記第2の一対のワイヤシースに取付可能である、第2の張力ブロックアセンブリと
をさらに備える、請求項13に記載の駆動システム。
【請求項15】
前記従動子アセンブリはさらに、前記長手方向運動滑車に連結され、前記従動子を前記ガイドレールに沿って長手方向に駆動するために歯車トラックに沿って移動可能である、従動歯車を備える、請求項1に記載の駆動システム。
【請求項16】
細長い部材の運動を制御するための方法であって、
駆動システムを提供することであって、該駆動システムは、
第1の回転ノブと、第2の回転ノブとを有する、基部ユニットと、
ガイドレールに摺動可能に連結される従動子を含む、従動子アセンブリであって、該従動子は、長手方向運動滑車と、回転運動滑車と、該細長い部材がそれに取付可能であるように、該細長い部材を受容するよう構造化される整合要素とを含む、従動子アセンブリと、
該第1の回転ノブを該長手方向運動滑車に動作可能に連結する、長手方向運動ワイヤと、
該第2の回転ノブを該回転運動滑車に動作可能に連結する、回転運動ワイヤと
を備える、ことと、
該従動子を該ガイドレールに沿って長手方向に駆動するように、該第1の回転ノブを回転させることと、
該整合要素および取り付けられた細長い部材を回転させるように、該第2の回転ノブを回転させることと
を含む、方法。
【請求項17】
前記従動子アセンブリはさらに、
前記長手方向運動滑車に連結され、複数の歯車の歯を含む、従動歯車と、
前記従動歯車の前記歯車の歯に係合するように構造化される複数の歯車トラックの歯を有する、歯車トラックと、
を備える、請求項16に記載の方法。
【請求項18】
前記第1のノブは、第1の駆動スプール軸に動作可能に連結され、前記第2のノブは、第2の駆動スプール軸に動作可能に連結される、請求項16に記載の方法。
【請求項19】
前記長手方向運動ワイヤは、前記第1の駆動スプール軸を前記長手方向運動滑車に動作可能に連結し、前記回転運動ワイヤは、前記第2の駆動スプール軸を前記回転運動滑車に動作可能に連結し、前記第2のノブの回転は、前記整合要素の回転運動を引き起こす、前記回転運動ワイヤの長手方向運動を生じさせる、請求項18に記載の方法。
【請求項20】
前記ガイドレールに沿って前記従動子を駆動するように前記ノブを回転させる前に、前記第1の回転ノブを係止位置から係止解除位置に移動させることをさらに含む、請求項16に記載の方法。
【請求項21】
前記整合要素および取り付けられた細長い部材を回転させるように前記ノブを回転させる前に、前記第2の回転ノブを係止位置から係止解除位置に移動させることをさらに含む、請求項20に記載の方法。
【請求項22】
前記第1および第2の回転ノブはそれぞれ、前記ノブが前記係止位置にあるときに、前記基部ユニットの対応する複数の係止歯に係合するように構造化される、複数のノブ歯車の歯を含む、請求項21に記載の方法。
【請求項23】
前記第1および第2の回転ノブは、実質的に軸方向の力を前記ノブに適用することによって、前記係止位置から前記係止解除位置に移動させられてもよい、請求項22に記載の方法。
【請求項24】
前記第1および第2の回転ノブの前記ノブ歯車の歯は、前記ノブが前記係止解除位置に移動させられたときに、前記対応する係止歯から係脱される、請求項23に記載の方法。
【請求項1】
細長い部材の運動を制御するための駆動システムであって、
第1の回転ノブと第2の回転ノブとを有する基部ユニットと、
ガイドレールに摺動可能に連結される従動子を含む従動子アセンブリであって、該従動子は、長手方向運動滑車と、回転運動滑車と、該細長い部材がそれに取付可能であるように、該細長い部材を受容するよう構造化される整合要素とを含む、従動子アセンブリと、
該第1のノブの回転が、該従動子を該ガイドレールに沿って長手方向に駆動するように、該第1の回転ノブを該長手方向運動滑車に動作可能に連結する、長手方向運動ワイヤと、
該第2のノブの回転が、該整合要素および取り付けられた細長い部材を回転させるように、該第2の回転ノブを該回転運動滑車に動作可能に連結する、回転運動ワイヤと
を備える、駆動システム。
【請求項2】
前記第1のノブは、第1の駆動スプール軸に動作可能に連結され、前記第2のノブは、第2の駆動スプール軸に動作可能に連結される、請求項1に記載の駆動システム。
【請求項3】
前記長手方向運動ワイヤは、前記第1の駆動スプール軸を前記長手方向運動滑車に動作可能に連結し、前記回転運動ワイヤは、前記第2の駆動スプール軸を前記回転運動滑車に動作可能に連結し、前記第2のノブの回転は、前記整合要素の回転運動を引き起こす、該回転運動ワイヤの長手方向運動を生じさせる、請求項2に記載の駆動システム。
【請求項4】
前記基部ユニットはさらに、
第1のノブ歯車を有する第1の内部ノブであって、該第1の内部ノブは、前記第1の回転ノブを前記第1の駆動スプール軸に動作可能に連結する、第1の内部ノブと、
第2のノブ歯車を有する第2の内部ノブであって、該第2の内部ノブは、前記第2の回転ノブを前記第2の駆動スプール軸に動作可能に連結する、第2の内部ノブと
を備える、請求項2に記載の駆動システム。
【請求項5】
前記第1の内部ノブはさらに、複数のノブ歯車の歯を有する、第1のノブ歯車を備える、請求項4に記載の駆動システム。
【請求項6】
前記第1の駆動スプール軸は、断面がほぼ正方形である端部分を含む、請求項5に記載の駆動システム。
【請求項7】
前記第1の内部ノブの前記第1のノブ歯車は、前記第1の駆動スプール軸の断面がほぼ正方形である端部分を受容するように構造化される開口を含む、請求項6に記載の駆動システム。
【請求項8】
前記基部ユニットに連結される係止デバイスをさらに備え、該係止デバイスは、前記第1の回転ノブが係止位置にあるときに、前記複数のノブ歯車の歯と係合可能である複数の係止歯を有する、請求項5に記載の駆動システム。
【請求項9】
前記第1の駆動スプール軸は、前記長手方向運動ワイヤの第1の端部を受容するように構造化される第1のスプールと、該長手方向運動ワイヤの第2の端部を受容するように構造化される第2のスプールとを備える、請求項2に記載の駆動システム。
【請求項10】
前記第2の駆動スプール軸は、前記回転運動ワイヤの第1の端部を受容するように構造化される第1のスプールと、該回転運動ワイヤの第2の端部を受容するように構造化される第2のスプールとを備える、請求項9に記載の駆動システム。
【請求項11】
前記従動子はさらに、前記回転運動ワイヤを係合するための、前記回転運動滑車に隣接して位置付けられる、1つ以上の遊び滑車部材を備える、請求項1に記載の駆動システム。
【請求項12】
前記従動子アセンブリはさらに、
前記長手方向運動滑車に連結され、複数の歯車の歯を含む、従動歯車と、
該従動歯車の、歯車の歯に係合するように構造化される複数の歯車トラックの歯を有する、歯車トラックと
を備える、請求項1に記載の駆動システム。
【請求項13】
前記基部ユニットと前記従動子アセンブリとの間に延在し、その中で前記長手方向運動ワイヤを受容するように構造化される、第1の一対のワイヤシースと、
前記基部ユニットと前記従動子アセンブリとの間に延在し、その中で前記回転運動ワイヤを受容するように構造化される、第2の一対のワイヤシースと
をさらに備える、請求項1に記載の駆動システム。
【請求項14】
前記第1の一対のワイヤシースに取付可能である、第1の張力ブロックアセンブリと、
前記第2の一対のワイヤシースに取付可能である、第2の張力ブロックアセンブリと
をさらに備える、請求項13に記載の駆動システム。
【請求項15】
前記従動子アセンブリはさらに、前記長手方向運動滑車に連結され、前記従動子を前記ガイドレールに沿って長手方向に駆動するために歯車トラックに沿って移動可能である、従動歯車を備える、請求項1に記載の駆動システム。
【請求項16】
細長い部材の運動を制御するための方法であって、
駆動システムを提供することであって、該駆動システムは、
第1の回転ノブと、第2の回転ノブとを有する、基部ユニットと、
ガイドレールに摺動可能に連結される従動子を含む、従動子アセンブリであって、該従動子は、長手方向運動滑車と、回転運動滑車と、該細長い部材がそれに取付可能であるように、該細長い部材を受容するよう構造化される整合要素とを含む、従動子アセンブリと、
該第1の回転ノブを該長手方向運動滑車に動作可能に連結する、長手方向運動ワイヤと、
該第2の回転ノブを該回転運動滑車に動作可能に連結する、回転運動ワイヤと
を備える、ことと、
該従動子を該ガイドレールに沿って長手方向に駆動するように、該第1の回転ノブを回転させることと、
該整合要素および取り付けられた細長い部材を回転させるように、該第2の回転ノブを回転させることと
を含む、方法。
【請求項17】
前記従動子アセンブリはさらに、
前記長手方向運動滑車に連結され、複数の歯車の歯を含む、従動歯車と、
前記従動歯車の前記歯車の歯に係合するように構造化される複数の歯車トラックの歯を有する、歯車トラックと、
を備える、請求項16に記載の方法。
【請求項18】
前記第1のノブは、第1の駆動スプール軸に動作可能に連結され、前記第2のノブは、第2の駆動スプール軸に動作可能に連結される、請求項16に記載の方法。
【請求項19】
前記長手方向運動ワイヤは、前記第1の駆動スプール軸を前記長手方向運動滑車に動作可能に連結し、前記回転運動ワイヤは、前記第2の駆動スプール軸を前記回転運動滑車に動作可能に連結し、前記第2のノブの回転は、前記整合要素の回転運動を引き起こす、前記回転運動ワイヤの長手方向運動を生じさせる、請求項18に記載の方法。
【請求項20】
前記ガイドレールに沿って前記従動子を駆動するように前記ノブを回転させる前に、前記第1の回転ノブを係止位置から係止解除位置に移動させることをさらに含む、請求項16に記載の方法。
【請求項21】
前記整合要素および取り付けられた細長い部材を回転させるように前記ノブを回転させる前に、前記第2の回転ノブを係止位置から係止解除位置に移動させることをさらに含む、請求項20に記載の方法。
【請求項22】
前記第1および第2の回転ノブはそれぞれ、前記ノブが前記係止位置にあるときに、前記基部ユニットの対応する複数の係止歯に係合するように構造化される、複数のノブ歯車の歯を含む、請求項21に記載の方法。
【請求項23】
前記第1および第2の回転ノブは、実質的に軸方向の力を前記ノブに適用することによって、前記係止位置から前記係止解除位置に移動させられてもよい、請求項22に記載の方法。
【請求項24】
前記第1および第2の回転ノブの前記ノブ歯車の歯は、前記ノブが前記係止解除位置に移動させられたときに、前記対応する係止歯から係脱される、請求項23に記載の方法。
【図1】

【図2A】
【図2B】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8A】
【図8B】
【図9A】
【図9B】
【図10】
【図11】
【図12A】

【図12B】
【図2A】
【図2B】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8A】
【図8B】
【図9A】
【図9B】
【図10】
【図11】
【図12A】
【図12B】
【公表番号】特表2011−530355(P2011−530355A)
【公表日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願番号】特願2011−522361(P2011−522361)
【出願日】平成21年8月14日(2009.8.14)
【国際出願番号】PCT/CA2009/001138
【国際公開番号】WO2010/017642
【国際公開日】平成22年2月18日(2010.2.18)
【出願人】(511036174)モンテリス メディカル, インコーポレイテッド (2)
【Fターム(参考)】
【公表日】平成23年12月22日(2011.12.22)
【国際特許分類】
【出願日】平成21年8月14日(2009.8.14)
【国際出願番号】PCT/CA2009/001138
【国際公開番号】WO2010/017642
【国際公開日】平成22年2月18日(2010.2.18)
【出願人】(511036174)モンテリス メディカル, インコーポレイテッド (2)
【Fターム(参考)】
[ Back to top ]