
定圧刺激装置
【課題】痛みのトリガーポイントを探すために皮膚を一定圧力で局所的に押圧する機能を持った定圧刺激装置を提供する。
【解決手段】光を照射する発光素子108と、光が照射されるべき硬結部位である痛みのトリガーポイントを探すために、生体の皮膚2上に当接される突出部104と、突出部104によって生体に加えられる圧力を測定する圧力測定部110とを有し、駆動部112が突出部104を進退移動させて、実測圧力が設定圧力と同じになるように調整する。
【解決手段】光を照射する発光素子108と、光が照射されるべき硬結部位である痛みのトリガーポイントを探すために、生体の皮膚2上に当接される突出部104と、突出部104によって生体に加えられる圧力を測定する圧力測定部110とを有し、駆動部112が突出部104を進退移動させて、実測圧力が設定圧力と同じになるように調整する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、痛みのトリガーポイントを探すために皮膚を一定圧力で局所的に押圧する機能を持った皮膚を定圧刺激するための定圧刺激装置に関する。
【背景技術】
【0002】
従来から、腰痛などの痛みを緩和するために、鍼、温灸など東洋医学の療法が利用され、効果をあげてきた。そして、近年では、東洋医学のみならず、西洋医学においても、腰痛などの痛みの本質を科学的に解明するための研究がなされ、ペインクリニックとして応用されるにいたっている。
【0003】
これらの研究においては、痛みを緩和するために「トリガーポイント」と呼ばれる箇所が重要な意味を持っていると考えられている。ここで、トリガーポイントとは、圧痛の点のうち最も強い痛みがある点を意味する。トリガーポイントは、皮膚、靭帯、筋、筋膜、および骨膜に生じやすいことが知られており、特に、筋肉の表面を覆う筋膜に生じるトリガーポイントの重要性は高い。たとえば、通常の腰痛症、すなわち、筋および筋膜性の腰痛では、主として腰仙部の筋肉内や筋膜に有痛性の硬結が出現し、この硬結部位を中心とした圧痛が認められる。すなわち、この硬結部位が疼痛全体のトリガーポイントといえる。
【0004】
トリガーポイントとなる硬結が生じる仕組みは、完全には解明されいないものの、現在までに得られた知見からは、腰背筋膜を貫通するように延びた皮神経および血管が、寝違い、不自然な姿勢、長期間の労働、およびスポーツなどの行為によって、物理的または化学的に刺激され、この結果、筋膜貫通部分で循環障害を惹き起こすことにより、硬結が作られると考えられている。
【0005】
このように、筋膜貫通部分での循環障害によって硬結が生じるという認識に基づいて、循環改善効果を得るために、低反応レベルレーザや直線偏光赤外線などの光をトリガーポイントに照射する光療法が用いられている。
【0006】
しかしながら、光療法を用いる場合には、痛みのトリガーポイントを探すのが難しという問題がある。一般的には、トリガーポイントの探索は、施術者の指を用いた触診でなされるが、触診の際の圧力が強すぎると患者に不必要な痛みを与える一方、圧力が小さすぎるとトリガーポイントが見逃されてしまう。また、施術者の指を用いているため、指の爪が患者の筋肉に食い込むことによって生じる不快感をトリガーポイントの圧痛と誤解するおそれもある。
【0007】
これらの問題を解決すべく、指を用いた触診をすることなく、トリガーポイントを探索して光を照射する光照射装置が提案されている(特許文献1および特許文献2参照)。
【0008】
特許文献1に記載の技術は、トリガーポイントを探索しながら、レーザ光を照射する。この特許文献1では、トリガーポイントを探索する方法として、電圧刺激法および圧刺激法の2種類の方法が開示されている。
【0009】
ここで、特許文献1で開示されている電圧刺激法は、電極を用いて電気刺激を与えて、最も反応が強い部分をトリガーポイントとみなして、光照射するものである。しかしながら、上述したとおり、トリガーポイントは、圧痛の点のうち最も強い痛みがある点であり、機械的な圧刺激によって探索されるべきものである。したがって、特許文献1の電圧刺激法では、電気的な刺激を感知して筋の攣縮を生み出すような運動点を探索することができるものの、本来の意味のトリガーポイントを探索することが難しい。
【0010】
また、特許文献1で開示されている圧刺激法は、照射口部を所定の圧力以上で人体に押し付けたことを、スプリングおよびリミットスイッチ、または圧力センサで検出し、点滅表示によって施術者に知らせるものである。この方法では、点滅表示を見た施術者が装置を押し付ける圧力を調整することによって、ほぼ一定の圧力で圧刺激を与えることができるとされている。しかしながら、この方法は、結局のところ、施術者が装置を押し付ける圧力を調整しなければならないため、施術者の操作いかんによっては、押し付ける圧力が強すぎたり、弱すぎたりすることを防止できない。また、点滅表示をみながら作業を行うことが煩雑であるといった問題もある。
【0011】
一方、特許文献2に記載の技術は、略U字形に屈曲した弾性材料で作られた帯状の補助具の内側表面に凸状のLEDを取り付けたものである。この技術では、略U字形に屈曲した帯状の補助具に人体を挟み込んで圧力を加えることができる。この技術を用いてトリガーポイントを探索する場合には、補助具に人体を挟み込みつつ、補助具を手で引っ張るなどして移動させる。この結果、凸状のLEDが所定の圧力で皮膚に押し付けられながら、皮膚表面に沿って移動する。そして、LEDがトリガーポイント上に来ることにより、痛みが強くなるため、トリガーポイントを探索でき、探索されたトリガーポイントに対して光を照射することができる。しかしながら、屈曲した帯状の補助具に身体を挟み込んで圧力を加えるのでは、挟み込まれる身体部分の厚さによって、圧力が変化してしまう。したがって、この特許文献2に記載の技術によっても、一定の圧力を加えることが難しい。また、手で引っ張るなどして補助具を移動させることも煩雑であり、練習および熟練を要するものである。
【特許文献1】特開平6−190071号公報
【特許文献2】特開平2001−137369号公報
【発明の開示】
【発明が解決しようとする課題】
【0012】
以上のように、従来の光照射装置では、生体を押圧する圧力が、施術者の操作や生体の厚さによって変化してしまうので、トリガーポイントを探すために生体に一定の圧力を加えることが困難であった。したがって、トリガーポイントの探索が困難となる場合があった。また、このような問題は、光照射装置のみならず、生体に対して局所的な圧力の刺激を加える圧刺激装置などにおいても生じるものといえる。
【0013】
本発明は、以上の問題を解決するためになされたものであり、本発明の目的は、施術者の操作や人体の厚さに依存することなく、トリガーポイントを探すために人体に一定の圧力を加えることができて、定圧刺激を行うことができる定圧刺激装置を提供することである。
【課題を解決するための手段】
【0014】
本発明の目的は、下記する手段により達成される。
【0015】
(1)本発明の定圧刺激装置は、硬結部位である痛みのトリガーポイントを探索するための定圧刺激装置であって、生体を局所的に刺激するために、生体の皮膚上に当接される突出部と、前記突出部によって生体に加えられる圧力を測定する圧力測定手段と、前記突出部を進退移動させて、前記圧力測定手段で測定される圧力が設定圧力と同じになるように調整する圧力調整手段と、を有することを特徴とする。
【0016】
(2)前記突出部の皮膚当接面は、直径が2〜20mmの円形形状をしている。
【0017】
(3)さらに、前記突出部が進退移動可能に取り付けられている筐体と、当該筐体を保持するための保持手段と、を有する。
【0018】
(4)前記保持手段は、複数のアームが関節部を介して連結した多関節アームを含んでいる。
【0019】
(5)前記圧力測定手段は、ロードセルを含んでおり、前記圧力調整手段は、測定された圧力と設定圧力にそれぞれ対応する電圧信号間の差分をとる差動アンプと、当該差動アンプの出力に基づいて直線駆動するリニアアクチュエータとを含んでいる。
【発明の効果】
【0020】
本発明の定圧刺激装置によれば、突出部を進退移動させて、実測圧力が設定圧力と同じになるように調整するので、施術者の操作または人体の厚さに依存することなく、トリガーポイントを探すために人体に一定の圧力を加えて定圧刺激を行うことができる。
【発明を実施するための最良の形態】
【0021】
以下、図面を参照して、本発明の実施の形態を説明する。
【0022】
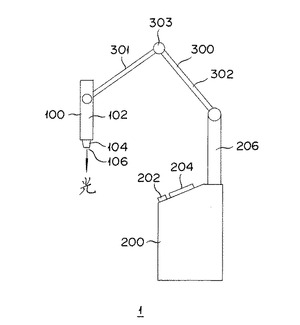
図1は、本発明の一実施の形態における光照射装置の全体構成を示す図である。
【0023】
光照射装置1は、痛みのトリガーポイントを探索するために一定の圧力で皮膚を局所的を押圧し、探索されたトリガーポイントに光を照射する装置である。図1に示されるとおり、光照射装置1は、光照射部100と、制御部200と、多関節アーム300とを有している。
【0024】
光照射部100は、筐体102内に進退移動可能に設けられた突出部104を有している。突出部104は、痛みのトリガーポイントを探索するために生体の皮膚上に当接される部分である。突出部104の先端には、光を照射するための光照射口106が設けられている。
【0025】
制御部200は、光照射装置の制御を行うものである。具体的には、制御部200は、突出部104によって皮膚に加えられる圧力を調整するために、突出部104を進退移動させるように制御する。また、制御部200には、圧力条件や照射条件を設定するための操作部202と、種々の表示を行う表示パネル204とが設けられている。
【0026】
多関節アーム300は、複数のアーム301、302が関節部303を介して回動自在に取り付けられたものである。多関節アーム300は、光照射部100を患者の皮膚上の各点に移動し、その点上で保持するために役立つ。多関節アーム300の一端は、光照射部の筐体100に取り付けられており、その他端は、制御部200のスタンド206に取り付けられている。多関節アーム300とスタンド206は、光照射部100の筐体を保持する保持手段として機能する。
【0027】
なお、多関節アーム300の内部には、光照射部100と制御部200との間を電気的に接続するための電気配線(不図示)が設けられており、この電気配線を通じて、光照射部100と制御部200との間で電気信号がやり取りされる。
【0028】
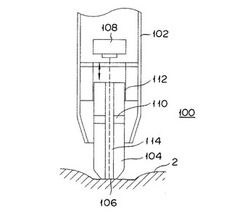
次に、光照射部100の内部の構成を説明する。図2は、光照射部100内部の構成を模式的に示す図である。光照射部100は、筐体102と、上記の光照射口106から光を照射するために筐体102内部に配置された発光素子108とを有する。また、光照射部100には、筐体102の内部に移動可能に保持された突出部104と、突出部104に作用する圧力を測定する圧力測定部110と、突出部104を軸線に沿って進退移動させる駆動部112とが設けられている。
【0029】
筒状の筐体102の一端面には、中央部に開口が設けられている。突出部104は、略円筒状に形成されるとともに、その先端は、皮膚2に当接される際に痛くないように角が丸められており、突出部104の先端が筐体102の端部の開口を挿通できるように設けられている。
【0030】
突出部104の先端面、すなわち、突出部104の皮膚当接面は、円形形状をしていることが望ましい。この皮膚当接面の直径は2〜20mmであり、より好ましくは、3〜10mmである。これは、皮膚当接面のサイズが、トリガーポイントを構成する硬結などのサイズよりも大きすぎると、トリガーポイント以外の部分も一緒に押圧することになり、患者の反応が鈍くなる一方、皮膚当接面のサイズが小さすぎると、突出部104が皮膚2に突き立てられることによる患者の不快感をトリガーポイントの圧痛と誤解するおそれがあるからである。なお、突出部104には、光を通すための貫通孔114が設けられている。貫通孔114は、突出部104の先端の照射口106から軸線にそって形成されている。
【0031】
筐体102内に設けられる圧力測定部110は、突出部104に作用する圧力(すなわち突出部104によって皮膚2に加えられる圧力に相当)を測定する圧力センサとして機能するロードセルを収容している。このロードセルには、突出部104の基部が接続されている。ここで、突出部104の基部とロードセルとは、種々の方法で接続することが可能である。たとえば、突出部104が皮膚2に当接されて圧力を受けた際に軸線に沿って内方へ微動してロードセルに力を伝達できるように突出部104を取り付けることができる。なお、ロードセルの構造は、従来のものと同様であるので詳しい説明を省略する。本実施の形態では、ロードセルなどの圧力測定部110は、光が通る貫通孔114を塞がないように配置される必要がある。
【0032】
駆動部112は、突出部104を軸線に沿って進退移動させるリニアアクチュエータである。リニアアクチュエータとしては、たとえば、中空軸モータとボールネジとを組み合わせて直線運動を得るタイプの構成を採用することができる。この場合、筐体102内に固定された中空軸モータにおいてロータ部分に設けられたボールナットと突出部104の基部側から伸延されたボールネジとが螺合されるとともに、突出部104が回転しないようにリニアスライダ等が設けられる。このように構成した場合には、ロータが正方向に回転すると突出部104が軸に沿って外方に移動し、ロータが負方向に回転すると突出部104が軸に沿って内方に移動することとなる。
【0033】
しかしながら、駆動部112の構成としては、この場合に限られず、ワイヤ、プーリ、ベルトを用いて直線運動を得るタイプ、ギア変換タイプ、リニアモータタイプなど種々のリニアアクチュエータを採用することができる。リニアアクチュエータの具体的な構成については、従来と同様であるので、詳しい説明を省略する。
【0034】
なお、本実施の形態では、駆動部112は、突出部104の貫通孔114を塞がないように配置される必要がある。たとえば、駆動部112として、中空軸モータとボールネジとを組み合わせて直線運動を得るタイプの構成を採用した場合には、突出部104の基部側から伸延されるボールネジにおいても軸線にそって貫通孔を形成し、この貫通孔を突出部104の貫通孔114と連通させることによって、貫通孔114を塞がないように構成することができる。
【0035】
次に、発光素子108について説明する。発光素子108は、たとえば半導体レーザ素子などのレーザ素子である。なお、半導体レーザ素子の代わりに、発光ダイオード(LED)を採用することもできる。発光素子108は、照射される光の光軸が貫通孔114と合うように筐体102内に配置される。
【0036】
次に、圧力測定部110によって測定された圧力に応じて駆動部112を駆動して圧力を調整するための回路構成例について説明する。
【0037】
図3は、本実施の形態の光照射装置の回路構成例を模式的に示す図である。なお、図3に示される回路構成は、主として、上記の制御部200に実装されるが、その一部は光照射部100に実装されてもよい。
【0038】
図3に示される回路構成例では、制御部200は、フィードバック制御回路を構成しており、アンプ210、実測圧表示回路220、圧設定回路230、設定圧表示回路240、差動アンプ250、およびモータ駆動回路260を有する。なお、ここでは、圧力測定部110としてロードセル116を含み、駆動部112としてモータ118を含む場合を例にとって説明する。
【0039】
アンプ210は、ロードセル116からの電圧信号を検出する。なお、ロードセル116は、ホイーストンブリッジ回路を内蔵しており、このホイーストンブリッジ回路の出力が電圧信号として検出される。得られた電圧信号は、実測圧力に対応するものであり、この電圧信号が実測圧表示回路220へ入力されるとともに、差動アンプ250にも入力される。実測圧表示回路220は、実測圧力値を表示パネル204に表示する。
【0040】
圧設定回路230は、目標とする圧力を設定するための回路である。設定される圧力(「設定圧力」と称する)は、施術者が操作部202を操作することによって適宜に変更することができる。設定圧力に対応する電圧信号は、設定圧表示回路240へ入力されるとともに、差動アンプ250にも入力される。設定圧表示回路240は、設定圧力値を表示パネル204に表示する。
【0041】
差動アンプ250は、実測圧力と設定圧力にそれぞれ対応する電圧信号間の差分をとるものであり、必要に応じて所定の利得で増幅してモータ駆動回路260に伝える。この結果、モータ駆動回路260は、実測圧力と設定圧力の差分に応じてモータ118に指令を出力する。指令を受けたモータ118が回転すると、それに応じて突出部104が進退移動する。
【0042】
以上のような回路によれば、突出部104を皮膚2に当接した場合に、突出部104を進退移動させて、圧力測定部110によって測定された圧力が設定圧力と同じになるように調整することができる。
【0043】
次に、以上のように構成される光照射装置1を用いたトリガーポイント探索および光照射の処理手順について説明する。
【0044】
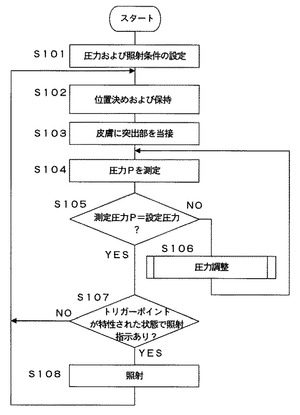
図4は、本実施の形態の光照射装置1を用いた処理手順を示すフローチャートである。
【0045】
まず、圧力条件および照射条件が設定される(ステップS101)。具体的には、突出部104によって皮膚2を押圧する圧力が設定される。設定圧力の値は、実験観察によって適宜に定めることができる。また、照射条件として、照射強度や照射時間が設定される。なお、すでに設定がされており、設定を変更する必要もない場合には、ステップS101の処理は省略される。
【0046】
次に、施術者によって光照射部100が患者の皮膚2上に位置決めされる(ステップ102)。位置決めされた光照射部100は、多関節アーム300およびスタンド206により保持される。
【0047】
突出部104が皮膚2に当接され(ステップS103)、圧力測定部110は、突出部104によって生体に加えられる圧力を測定する(ステップS104)。なお、圧力の測定は、施術者がスイッチなどを操作することによって開始されてもよく、あるいは、突出部104が皮膚2に当接されたことによる圧力変化を圧力測定部110によって検知することによって自動的に開始されてもよい。この場合は、圧力測定部110は、タッチセンサとしても機能するといえる。
【0048】
そして、実測圧力Pが設定圧力と同じであるか否かが判断される(ステップS105)。設定圧力は、一つの圧力値として設定される。しかしながら、誤差や制御の安定性を考慮して、ある程度の幅を持った圧力範囲を設定圧力としてもよい。実測圧力Pが設定圧力と同じでない場合には(ステップS105:NO)、圧力調整処理がなされる(ステップS106)。まず、差動アンプ250によって、実測圧力Pと設定圧力にそれぞれ対応する電圧信号間の差分が出力されて、この出力に応じて、リニアアクチュエータである駆動部112が直線駆動される。この結果、突出部104が軸線に沿って移動して圧力が調整される。すなわち、差動アンプ250と駆動部112とは、実測圧力Pが設定圧力と同じになるように調整する圧力調整手段として機能する。
【0049】
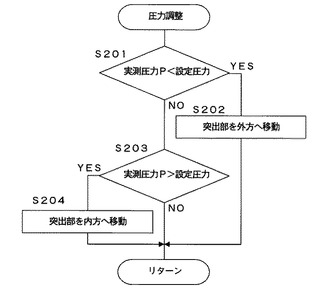
図5は、圧力調整処理の具体的な内容を示すフローチャートを示す。図5は、図4のステップS106のサブルーチンに対応する。図5に示されるとおり、実測圧力Pが設定圧力より小さい場合には(ステップS201:YES)、突出部104が外方(突き出し方向)へ移動する(ステップS202)。この結果、圧力が強められる。一方、実測圧力Pが設定圧力より大きい場合には(ステップS203:YES)、突出部104が内方(引き戻し方向)へ移動する(ステップS204)。この結果、圧力が弱められる。
【0050】
なお、圧力の測定処理(ステップS104)、設定圧力との比較処理(ステップS105)、および圧力調整処理(ステップS106)は、繰り返し実行されている。この結果、患者の身体が動いた場合には、それに応じて突出部104が内方または外方に移動する。したがって、常に、実測圧力が設定圧力と一致するように加圧強度が制御されることとなる。
【0051】
圧痛の点のうち最も強い痛みがある点であるトリガーポイントが特定されていないうちは(ステップS107:NO)、上記のステップS101〜ステップS106の処理が繰り返される。具体的には、圧痛を伴う皮膚2の領域内の複数点に対して、ステップS101〜107の処理が繰り返されて、トリガーポイントが特定される。このとき、各点においても、一定の圧力で押圧することができるので、各点ごとの患者の痛みの反応を容易に比較することができるようになり、トリガーポイントの特定が容易となる。
【0052】
トリガーポイントが特定されると、速やかに光照射が実施されて、治療に移行する。すなわち、施術者は、患者から声などを聞き、トリガーポイントが特定されたと判断した場合には、照射を指示する。このようにトリガーポイントが特定された状態で、照射指示がされた場合には(ステップS107:YES)、照射処理がなされる(ステップS108)。なお、施術者が手元のスイッチ(不図示)などを押すことによって照射の指示をすることができる。
【0053】
照射の処理(ステップS108)では、発光素子108によって放出された光が、貫通孔114を経て照射口106から皮膚2へ照射される。特に、圧力を加えている突出部104自体に設けられた照射口106から光を照射することができるので、突出部104によって圧力を加えたままの状態での照射(圧迫照射)が容易である。このような圧迫照射は、交換神経節ブロック療法における、星状神経節への光照射にも有効である。すなわち、星状神経節は、第1胸椎横突起前方、すなわち胸部に近い頚部の皮下深部にあるため、星状神経節まで光を十分に届かせるためには、圧迫照射が好ましいといえるからである。
【0054】
以上のように構成される光照射装置1は、以下のような効果を奏する。
【0055】
(ア)人体に加えられる圧力が、施術者の操作や人体の厚さによって変化することがなく、トリガーポイントを探すために人体に一定の圧力を加えることができる。したがって、圧刺激による人体の反応を容易に比較でき、トリガーポイントの探索が容易となる。特に、施術者が、操作に熟練しなくても、圧刺激に対して最も強く反応する部位が探索できるので、的確な光照射が可能となり、効果的な治療が可能となる。
【0056】
(イ)特に、患者が動いた場合などであっても、その動きに合わせて突出部104が移動するので、操作が容易となる。
【0057】
(ウ)人体に当接されて押圧する突出部104自体に軸線に沿って貫通孔114が設けられており、この貫通孔114を通して光を照射することができるので、圧迫照射が容易である。
【0058】
(エ)突出部の皮膚当接面は、円形形状をしており、その直径が2〜20mm、より好ましくは3〜10mmであるので、皮膚当接面の大きさをトリガーポイントと同様の大きさにすることができ、圧刺激による人体の反応が良好に得られる。
【0059】
(オ)光照射部100の筐体102は、多関節アーム300およびスタンド206からなる保持手段によって保持されるので、光照射部100を皮膚2上の各点に移動することができるとともに、光照射部100を各点上で保持することができる。したがって、操作性が高まる。
【0060】
(カ)ロードセルを用いた圧力測定部110を筐体102内に組み込んだので、リミットスイッチなどを用いる場合と比べて、高精度かつ連続的に圧力を実測することができる。また、装置を小型化することができる。
【0061】
(キ)測定された圧力と設定された設定圧力との間の差分を増幅する差動アンプを用いて、差動アンプの出力に基づいてリニアアクチュエータが直線駆動されるので、リミットスイッチなどを用いる場合と異なり、患者間の状態の違いや個人差に柔軟に対応して設定値を変化させることもでき、適切に選択された一定圧力を加えることができる。
【0062】
以上のように、本発明の実施の形態について説明したが、本発明は、これらの場合に限られるものではなく、当業者によって種々の省略、追加、および改変が可能であることは明らかである。
【0063】
たとえば、上記の説明では、人体に当接される突出部に貫通孔を設けて、この貫通孔を通じて光を照射する場合を説明した。確かに、圧迫照射を容易に実行可能とするためには、このような構成が望ましいが、本発明は、この場合に限られるものではない。本発明は、突出部を進退移動させて、測定圧力が設定圧力と同じなるように痛みのトリガーポイントを探すために突出部によって一定の圧力を局所的に人体に加える機能を持った光照射装置であればよく、たとえば、図6に示すように、突出部と光路とを別々に設けた構成を採用することもできる。図6に示すような構成によれば、突出部104、圧力測定部110、および駆動部112などに貫通孔などを設ける必要がないので、本発明の構成が容易となる。
【0064】
また、図4のフローチャートのステップS102〜ステップS106に示されるように、圧力測定部と、突出部を進退移動させて圧力を調整する圧力調整部とを有する構成は、光照射装置以外の定圧刺激装置としても有用である。このような定圧刺激装置は、生体を局所的に刺激するために、生体の皮膚上に当接される突出部と、突出部によって生体に加えられる圧力を測定する圧力測定部と、突出部を進退移動させて、圧力測定手段で測定される圧力が設定圧力と同じになるように調整する圧力調整部と、を有することとなる。このような定圧刺激装置は、トリガーポイント探索用の定圧刺激装置として用いることもでき、生理学の触覚、圧覚、および痛覚の実験に使用される定圧刺激装置として用いることもできる。
【産業上の利用可能性】
【0065】
光照射装置や定圧刺激装置に広く用いることができる。
【図面の簡単な説明】
【0066】
【図1】本発明の一実施の形態の光照射装置の全体構成を示す図である。
【図2】図1に示される光照射部の構成を模式的に示す図である。
【図3】図1の光照射装置の回路構成例を模式的に示す図である。
【図4】図1の光照射装置を用いた処理手順を示すフローチャートである。
【図5】図4のステップS106における圧力調整処理の具体的な内容を示すフローチャートである。
【図6】本発明の変形例の光照射装置の全体構成を示す図である。
【符号の説明】
【0067】
1 光照射装置、
2 皮膚、
100 光照射部、
102 筐体、
104 突出部、
106 光照射口、
108 発光素子、
110 圧力測定部、
112 駆動部、
114 貫通孔、
116 ロードセル、
118 モータ、
200 制御部、
206 スタンド、
210 アンプ、
250 差動アンプ、
300 多関節アーム。
【技術分野】
【0001】
本発明は、痛みのトリガーポイントを探すために皮膚を一定圧力で局所的に押圧する機能を持った皮膚を定圧刺激するための定圧刺激装置に関する。
【背景技術】
【0002】
従来から、腰痛などの痛みを緩和するために、鍼、温灸など東洋医学の療法が利用され、効果をあげてきた。そして、近年では、東洋医学のみならず、西洋医学においても、腰痛などの痛みの本質を科学的に解明するための研究がなされ、ペインクリニックとして応用されるにいたっている。
【0003】
これらの研究においては、痛みを緩和するために「トリガーポイント」と呼ばれる箇所が重要な意味を持っていると考えられている。ここで、トリガーポイントとは、圧痛の点のうち最も強い痛みがある点を意味する。トリガーポイントは、皮膚、靭帯、筋、筋膜、および骨膜に生じやすいことが知られており、特に、筋肉の表面を覆う筋膜に生じるトリガーポイントの重要性は高い。たとえば、通常の腰痛症、すなわち、筋および筋膜性の腰痛では、主として腰仙部の筋肉内や筋膜に有痛性の硬結が出現し、この硬結部位を中心とした圧痛が認められる。すなわち、この硬結部位が疼痛全体のトリガーポイントといえる。
【0004】
トリガーポイントとなる硬結が生じる仕組みは、完全には解明されいないものの、現在までに得られた知見からは、腰背筋膜を貫通するように延びた皮神経および血管が、寝違い、不自然な姿勢、長期間の労働、およびスポーツなどの行為によって、物理的または化学的に刺激され、この結果、筋膜貫通部分で循環障害を惹き起こすことにより、硬結が作られると考えられている。
【0005】
このように、筋膜貫通部分での循環障害によって硬結が生じるという認識に基づいて、循環改善効果を得るために、低反応レベルレーザや直線偏光赤外線などの光をトリガーポイントに照射する光療法が用いられている。
【0006】
しかしながら、光療法を用いる場合には、痛みのトリガーポイントを探すのが難しという問題がある。一般的には、トリガーポイントの探索は、施術者の指を用いた触診でなされるが、触診の際の圧力が強すぎると患者に不必要な痛みを与える一方、圧力が小さすぎるとトリガーポイントが見逃されてしまう。また、施術者の指を用いているため、指の爪が患者の筋肉に食い込むことによって生じる不快感をトリガーポイントの圧痛と誤解するおそれもある。
【0007】
これらの問題を解決すべく、指を用いた触診をすることなく、トリガーポイントを探索して光を照射する光照射装置が提案されている(特許文献1および特許文献2参照)。
【0008】
特許文献1に記載の技術は、トリガーポイントを探索しながら、レーザ光を照射する。この特許文献1では、トリガーポイントを探索する方法として、電圧刺激法および圧刺激法の2種類の方法が開示されている。
【0009】
ここで、特許文献1で開示されている電圧刺激法は、電極を用いて電気刺激を与えて、最も反応が強い部分をトリガーポイントとみなして、光照射するものである。しかしながら、上述したとおり、トリガーポイントは、圧痛の点のうち最も強い痛みがある点であり、機械的な圧刺激によって探索されるべきものである。したがって、特許文献1の電圧刺激法では、電気的な刺激を感知して筋の攣縮を生み出すような運動点を探索することができるものの、本来の意味のトリガーポイントを探索することが難しい。
【0010】
また、特許文献1で開示されている圧刺激法は、照射口部を所定の圧力以上で人体に押し付けたことを、スプリングおよびリミットスイッチ、または圧力センサで検出し、点滅表示によって施術者に知らせるものである。この方法では、点滅表示を見た施術者が装置を押し付ける圧力を調整することによって、ほぼ一定の圧力で圧刺激を与えることができるとされている。しかしながら、この方法は、結局のところ、施術者が装置を押し付ける圧力を調整しなければならないため、施術者の操作いかんによっては、押し付ける圧力が強すぎたり、弱すぎたりすることを防止できない。また、点滅表示をみながら作業を行うことが煩雑であるといった問題もある。
【0011】
一方、特許文献2に記載の技術は、略U字形に屈曲した弾性材料で作られた帯状の補助具の内側表面に凸状のLEDを取り付けたものである。この技術では、略U字形に屈曲した帯状の補助具に人体を挟み込んで圧力を加えることができる。この技術を用いてトリガーポイントを探索する場合には、補助具に人体を挟み込みつつ、補助具を手で引っ張るなどして移動させる。この結果、凸状のLEDが所定の圧力で皮膚に押し付けられながら、皮膚表面に沿って移動する。そして、LEDがトリガーポイント上に来ることにより、痛みが強くなるため、トリガーポイントを探索でき、探索されたトリガーポイントに対して光を照射することができる。しかしながら、屈曲した帯状の補助具に身体を挟み込んで圧力を加えるのでは、挟み込まれる身体部分の厚さによって、圧力が変化してしまう。したがって、この特許文献2に記載の技術によっても、一定の圧力を加えることが難しい。また、手で引っ張るなどして補助具を移動させることも煩雑であり、練習および熟練を要するものである。
【特許文献1】特開平6−190071号公報
【特許文献2】特開平2001−137369号公報
【発明の開示】
【発明が解決しようとする課題】
【0012】
以上のように、従来の光照射装置では、生体を押圧する圧力が、施術者の操作や生体の厚さによって変化してしまうので、トリガーポイントを探すために生体に一定の圧力を加えることが困難であった。したがって、トリガーポイントの探索が困難となる場合があった。また、このような問題は、光照射装置のみならず、生体に対して局所的な圧力の刺激を加える圧刺激装置などにおいても生じるものといえる。
【0013】
本発明は、以上の問題を解決するためになされたものであり、本発明の目的は、施術者の操作や人体の厚さに依存することなく、トリガーポイントを探すために人体に一定の圧力を加えることができて、定圧刺激を行うことができる定圧刺激装置を提供することである。
【課題を解決するための手段】
【0014】
本発明の目的は、下記する手段により達成される。
【0015】
(1)本発明の定圧刺激装置は、硬結部位である痛みのトリガーポイントを探索するための定圧刺激装置であって、生体を局所的に刺激するために、生体の皮膚上に当接される突出部と、前記突出部によって生体に加えられる圧力を測定する圧力測定手段と、前記突出部を進退移動させて、前記圧力測定手段で測定される圧力が設定圧力と同じになるように調整する圧力調整手段と、を有することを特徴とする。
【0016】
(2)前記突出部の皮膚当接面は、直径が2〜20mmの円形形状をしている。
【0017】
(3)さらに、前記突出部が進退移動可能に取り付けられている筐体と、当該筐体を保持するための保持手段と、を有する。
【0018】
(4)前記保持手段は、複数のアームが関節部を介して連結した多関節アームを含んでいる。
【0019】
(5)前記圧力測定手段は、ロードセルを含んでおり、前記圧力調整手段は、測定された圧力と設定圧力にそれぞれ対応する電圧信号間の差分をとる差動アンプと、当該差動アンプの出力に基づいて直線駆動するリニアアクチュエータとを含んでいる。
【発明の効果】
【0020】
本発明の定圧刺激装置によれば、突出部を進退移動させて、実測圧力が設定圧力と同じになるように調整するので、施術者の操作または人体の厚さに依存することなく、トリガーポイントを探すために人体に一定の圧力を加えて定圧刺激を行うことができる。
【発明を実施するための最良の形態】
【0021】
以下、図面を参照して、本発明の実施の形態を説明する。
【0022】
図1は、本発明の一実施の形態における光照射装置の全体構成を示す図である。
【0023】
光照射装置1は、痛みのトリガーポイントを探索するために一定の圧力で皮膚を局所的を押圧し、探索されたトリガーポイントに光を照射する装置である。図1に示されるとおり、光照射装置1は、光照射部100と、制御部200と、多関節アーム300とを有している。
【0024】
光照射部100は、筐体102内に進退移動可能に設けられた突出部104を有している。突出部104は、痛みのトリガーポイントを探索するために生体の皮膚上に当接される部分である。突出部104の先端には、光を照射するための光照射口106が設けられている。
【0025】
制御部200は、光照射装置の制御を行うものである。具体的には、制御部200は、突出部104によって皮膚に加えられる圧力を調整するために、突出部104を進退移動させるように制御する。また、制御部200には、圧力条件や照射条件を設定するための操作部202と、種々の表示を行う表示パネル204とが設けられている。
【0026】
多関節アーム300は、複数のアーム301、302が関節部303を介して回動自在に取り付けられたものである。多関節アーム300は、光照射部100を患者の皮膚上の各点に移動し、その点上で保持するために役立つ。多関節アーム300の一端は、光照射部の筐体100に取り付けられており、その他端は、制御部200のスタンド206に取り付けられている。多関節アーム300とスタンド206は、光照射部100の筐体を保持する保持手段として機能する。
【0027】
なお、多関節アーム300の内部には、光照射部100と制御部200との間を電気的に接続するための電気配線(不図示)が設けられており、この電気配線を通じて、光照射部100と制御部200との間で電気信号がやり取りされる。
【0028】
次に、光照射部100の内部の構成を説明する。図2は、光照射部100内部の構成を模式的に示す図である。光照射部100は、筐体102と、上記の光照射口106から光を照射するために筐体102内部に配置された発光素子108とを有する。また、光照射部100には、筐体102の内部に移動可能に保持された突出部104と、突出部104に作用する圧力を測定する圧力測定部110と、突出部104を軸線に沿って進退移動させる駆動部112とが設けられている。
【0029】
筒状の筐体102の一端面には、中央部に開口が設けられている。突出部104は、略円筒状に形成されるとともに、その先端は、皮膚2に当接される際に痛くないように角が丸められており、突出部104の先端が筐体102の端部の開口を挿通できるように設けられている。
【0030】
突出部104の先端面、すなわち、突出部104の皮膚当接面は、円形形状をしていることが望ましい。この皮膚当接面の直径は2〜20mmであり、より好ましくは、3〜10mmである。これは、皮膚当接面のサイズが、トリガーポイントを構成する硬結などのサイズよりも大きすぎると、トリガーポイント以外の部分も一緒に押圧することになり、患者の反応が鈍くなる一方、皮膚当接面のサイズが小さすぎると、突出部104が皮膚2に突き立てられることによる患者の不快感をトリガーポイントの圧痛と誤解するおそれがあるからである。なお、突出部104には、光を通すための貫通孔114が設けられている。貫通孔114は、突出部104の先端の照射口106から軸線にそって形成されている。
【0031】
筐体102内に設けられる圧力測定部110は、突出部104に作用する圧力(すなわち突出部104によって皮膚2に加えられる圧力に相当)を測定する圧力センサとして機能するロードセルを収容している。このロードセルには、突出部104の基部が接続されている。ここで、突出部104の基部とロードセルとは、種々の方法で接続することが可能である。たとえば、突出部104が皮膚2に当接されて圧力を受けた際に軸線に沿って内方へ微動してロードセルに力を伝達できるように突出部104を取り付けることができる。なお、ロードセルの構造は、従来のものと同様であるので詳しい説明を省略する。本実施の形態では、ロードセルなどの圧力測定部110は、光が通る貫通孔114を塞がないように配置される必要がある。
【0032】
駆動部112は、突出部104を軸線に沿って進退移動させるリニアアクチュエータである。リニアアクチュエータとしては、たとえば、中空軸モータとボールネジとを組み合わせて直線運動を得るタイプの構成を採用することができる。この場合、筐体102内に固定された中空軸モータにおいてロータ部分に設けられたボールナットと突出部104の基部側から伸延されたボールネジとが螺合されるとともに、突出部104が回転しないようにリニアスライダ等が設けられる。このように構成した場合には、ロータが正方向に回転すると突出部104が軸に沿って外方に移動し、ロータが負方向に回転すると突出部104が軸に沿って内方に移動することとなる。
【0033】
しかしながら、駆動部112の構成としては、この場合に限られず、ワイヤ、プーリ、ベルトを用いて直線運動を得るタイプ、ギア変換タイプ、リニアモータタイプなど種々のリニアアクチュエータを採用することができる。リニアアクチュエータの具体的な構成については、従来と同様であるので、詳しい説明を省略する。
【0034】
なお、本実施の形態では、駆動部112は、突出部104の貫通孔114を塞がないように配置される必要がある。たとえば、駆動部112として、中空軸モータとボールネジとを組み合わせて直線運動を得るタイプの構成を採用した場合には、突出部104の基部側から伸延されるボールネジにおいても軸線にそって貫通孔を形成し、この貫通孔を突出部104の貫通孔114と連通させることによって、貫通孔114を塞がないように構成することができる。
【0035】
次に、発光素子108について説明する。発光素子108は、たとえば半導体レーザ素子などのレーザ素子である。なお、半導体レーザ素子の代わりに、発光ダイオード(LED)を採用することもできる。発光素子108は、照射される光の光軸が貫通孔114と合うように筐体102内に配置される。
【0036】
次に、圧力測定部110によって測定された圧力に応じて駆動部112を駆動して圧力を調整するための回路構成例について説明する。
【0037】
図3は、本実施の形態の光照射装置の回路構成例を模式的に示す図である。なお、図3に示される回路構成は、主として、上記の制御部200に実装されるが、その一部は光照射部100に実装されてもよい。
【0038】
図3に示される回路構成例では、制御部200は、フィードバック制御回路を構成しており、アンプ210、実測圧表示回路220、圧設定回路230、設定圧表示回路240、差動アンプ250、およびモータ駆動回路260を有する。なお、ここでは、圧力測定部110としてロードセル116を含み、駆動部112としてモータ118を含む場合を例にとって説明する。
【0039】
アンプ210は、ロードセル116からの電圧信号を検出する。なお、ロードセル116は、ホイーストンブリッジ回路を内蔵しており、このホイーストンブリッジ回路の出力が電圧信号として検出される。得られた電圧信号は、実測圧力に対応するものであり、この電圧信号が実測圧表示回路220へ入力されるとともに、差動アンプ250にも入力される。実測圧表示回路220は、実測圧力値を表示パネル204に表示する。
【0040】
圧設定回路230は、目標とする圧力を設定するための回路である。設定される圧力(「設定圧力」と称する)は、施術者が操作部202を操作することによって適宜に変更することができる。設定圧力に対応する電圧信号は、設定圧表示回路240へ入力されるとともに、差動アンプ250にも入力される。設定圧表示回路240は、設定圧力値を表示パネル204に表示する。
【0041】
差動アンプ250は、実測圧力と設定圧力にそれぞれ対応する電圧信号間の差分をとるものであり、必要に応じて所定の利得で増幅してモータ駆動回路260に伝える。この結果、モータ駆動回路260は、実測圧力と設定圧力の差分に応じてモータ118に指令を出力する。指令を受けたモータ118が回転すると、それに応じて突出部104が進退移動する。
【0042】
以上のような回路によれば、突出部104を皮膚2に当接した場合に、突出部104を進退移動させて、圧力測定部110によって測定された圧力が設定圧力と同じになるように調整することができる。
【0043】
次に、以上のように構成される光照射装置1を用いたトリガーポイント探索および光照射の処理手順について説明する。
【0044】
図4は、本実施の形態の光照射装置1を用いた処理手順を示すフローチャートである。
【0045】
まず、圧力条件および照射条件が設定される(ステップS101)。具体的には、突出部104によって皮膚2を押圧する圧力が設定される。設定圧力の値は、実験観察によって適宜に定めることができる。また、照射条件として、照射強度や照射時間が設定される。なお、すでに設定がされており、設定を変更する必要もない場合には、ステップS101の処理は省略される。
【0046】
次に、施術者によって光照射部100が患者の皮膚2上に位置決めされる(ステップ102)。位置決めされた光照射部100は、多関節アーム300およびスタンド206により保持される。
【0047】
突出部104が皮膚2に当接され(ステップS103)、圧力測定部110は、突出部104によって生体に加えられる圧力を測定する(ステップS104)。なお、圧力の測定は、施術者がスイッチなどを操作することによって開始されてもよく、あるいは、突出部104が皮膚2に当接されたことによる圧力変化を圧力測定部110によって検知することによって自動的に開始されてもよい。この場合は、圧力測定部110は、タッチセンサとしても機能するといえる。
【0048】
そして、実測圧力Pが設定圧力と同じであるか否かが判断される(ステップS105)。設定圧力は、一つの圧力値として設定される。しかしながら、誤差や制御の安定性を考慮して、ある程度の幅を持った圧力範囲を設定圧力としてもよい。実測圧力Pが設定圧力と同じでない場合には(ステップS105:NO)、圧力調整処理がなされる(ステップS106)。まず、差動アンプ250によって、実測圧力Pと設定圧力にそれぞれ対応する電圧信号間の差分が出力されて、この出力に応じて、リニアアクチュエータである駆動部112が直線駆動される。この結果、突出部104が軸線に沿って移動して圧力が調整される。すなわち、差動アンプ250と駆動部112とは、実測圧力Pが設定圧力と同じになるように調整する圧力調整手段として機能する。
【0049】
図5は、圧力調整処理の具体的な内容を示すフローチャートを示す。図5は、図4のステップS106のサブルーチンに対応する。図5に示されるとおり、実測圧力Pが設定圧力より小さい場合には(ステップS201:YES)、突出部104が外方(突き出し方向)へ移動する(ステップS202)。この結果、圧力が強められる。一方、実測圧力Pが設定圧力より大きい場合には(ステップS203:YES)、突出部104が内方(引き戻し方向)へ移動する(ステップS204)。この結果、圧力が弱められる。
【0050】
なお、圧力の測定処理(ステップS104)、設定圧力との比較処理(ステップS105)、および圧力調整処理(ステップS106)は、繰り返し実行されている。この結果、患者の身体が動いた場合には、それに応じて突出部104が内方または外方に移動する。したがって、常に、実測圧力が設定圧力と一致するように加圧強度が制御されることとなる。
【0051】
圧痛の点のうち最も強い痛みがある点であるトリガーポイントが特定されていないうちは(ステップS107:NO)、上記のステップS101〜ステップS106の処理が繰り返される。具体的には、圧痛を伴う皮膚2の領域内の複数点に対して、ステップS101〜107の処理が繰り返されて、トリガーポイントが特定される。このとき、各点においても、一定の圧力で押圧することができるので、各点ごとの患者の痛みの反応を容易に比較することができるようになり、トリガーポイントの特定が容易となる。
【0052】
トリガーポイントが特定されると、速やかに光照射が実施されて、治療に移行する。すなわち、施術者は、患者から声などを聞き、トリガーポイントが特定されたと判断した場合には、照射を指示する。このようにトリガーポイントが特定された状態で、照射指示がされた場合には(ステップS107:YES)、照射処理がなされる(ステップS108)。なお、施術者が手元のスイッチ(不図示)などを押すことによって照射の指示をすることができる。
【0053】
照射の処理(ステップS108)では、発光素子108によって放出された光が、貫通孔114を経て照射口106から皮膚2へ照射される。特に、圧力を加えている突出部104自体に設けられた照射口106から光を照射することができるので、突出部104によって圧力を加えたままの状態での照射(圧迫照射)が容易である。このような圧迫照射は、交換神経節ブロック療法における、星状神経節への光照射にも有効である。すなわち、星状神経節は、第1胸椎横突起前方、すなわち胸部に近い頚部の皮下深部にあるため、星状神経節まで光を十分に届かせるためには、圧迫照射が好ましいといえるからである。
【0054】
以上のように構成される光照射装置1は、以下のような効果を奏する。
【0055】
(ア)人体に加えられる圧力が、施術者の操作や人体の厚さによって変化することがなく、トリガーポイントを探すために人体に一定の圧力を加えることができる。したがって、圧刺激による人体の反応を容易に比較でき、トリガーポイントの探索が容易となる。特に、施術者が、操作に熟練しなくても、圧刺激に対して最も強く反応する部位が探索できるので、的確な光照射が可能となり、効果的な治療が可能となる。
【0056】
(イ)特に、患者が動いた場合などであっても、その動きに合わせて突出部104が移動するので、操作が容易となる。
【0057】
(ウ)人体に当接されて押圧する突出部104自体に軸線に沿って貫通孔114が設けられており、この貫通孔114を通して光を照射することができるので、圧迫照射が容易である。
【0058】
(エ)突出部の皮膚当接面は、円形形状をしており、その直径が2〜20mm、より好ましくは3〜10mmであるので、皮膚当接面の大きさをトリガーポイントと同様の大きさにすることができ、圧刺激による人体の反応が良好に得られる。
【0059】
(オ)光照射部100の筐体102は、多関節アーム300およびスタンド206からなる保持手段によって保持されるので、光照射部100を皮膚2上の各点に移動することができるとともに、光照射部100を各点上で保持することができる。したがって、操作性が高まる。
【0060】
(カ)ロードセルを用いた圧力測定部110を筐体102内に組み込んだので、リミットスイッチなどを用いる場合と比べて、高精度かつ連続的に圧力を実測することができる。また、装置を小型化することができる。
【0061】
(キ)測定された圧力と設定された設定圧力との間の差分を増幅する差動アンプを用いて、差動アンプの出力に基づいてリニアアクチュエータが直線駆動されるので、リミットスイッチなどを用いる場合と異なり、患者間の状態の違いや個人差に柔軟に対応して設定値を変化させることもでき、適切に選択された一定圧力を加えることができる。
【0062】
以上のように、本発明の実施の形態について説明したが、本発明は、これらの場合に限られるものではなく、当業者によって種々の省略、追加、および改変が可能であることは明らかである。
【0063】
たとえば、上記の説明では、人体に当接される突出部に貫通孔を設けて、この貫通孔を通じて光を照射する場合を説明した。確かに、圧迫照射を容易に実行可能とするためには、このような構成が望ましいが、本発明は、この場合に限られるものではない。本発明は、突出部を進退移動させて、測定圧力が設定圧力と同じなるように痛みのトリガーポイントを探すために突出部によって一定の圧力を局所的に人体に加える機能を持った光照射装置であればよく、たとえば、図6に示すように、突出部と光路とを別々に設けた構成を採用することもできる。図6に示すような構成によれば、突出部104、圧力測定部110、および駆動部112などに貫通孔などを設ける必要がないので、本発明の構成が容易となる。
【0064】
また、図4のフローチャートのステップS102〜ステップS106に示されるように、圧力測定部と、突出部を進退移動させて圧力を調整する圧力調整部とを有する構成は、光照射装置以外の定圧刺激装置としても有用である。このような定圧刺激装置は、生体を局所的に刺激するために、生体の皮膚上に当接される突出部と、突出部によって生体に加えられる圧力を測定する圧力測定部と、突出部を進退移動させて、圧力測定手段で測定される圧力が設定圧力と同じになるように調整する圧力調整部と、を有することとなる。このような定圧刺激装置は、トリガーポイント探索用の定圧刺激装置として用いることもでき、生理学の触覚、圧覚、および痛覚の実験に使用される定圧刺激装置として用いることもできる。
【産業上の利用可能性】
【0065】
光照射装置や定圧刺激装置に広く用いることができる。
【図面の簡単な説明】
【0066】
【図1】本発明の一実施の形態の光照射装置の全体構成を示す図である。
【図2】図1に示される光照射部の構成を模式的に示す図である。
【図3】図1の光照射装置の回路構成例を模式的に示す図である。
【図4】図1の光照射装置を用いた処理手順を示すフローチャートである。
【図5】図4のステップS106における圧力調整処理の具体的な内容を示すフローチャートである。
【図6】本発明の変形例の光照射装置の全体構成を示す図である。
【符号の説明】
【0067】
1 光照射装置、
2 皮膚、
100 光照射部、
102 筐体、
104 突出部、
106 光照射口、
108 発光素子、
110 圧力測定部、
112 駆動部、
114 貫通孔、
116 ロードセル、
118 モータ、
200 制御部、
206 スタンド、
210 アンプ、
250 差動アンプ、
300 多関節アーム。
【特許請求の範囲】
【請求項1】
硬結部位である痛みのトリガーポイントを探索するための定圧刺激装置であって、
生体を局所的に刺激するために、生体の皮膚上に当接される突出部と、
前記突出部によって生体に加えられる圧力を測定する圧力測定手段と、
前記突出部を進退移動させて、前記圧力測定手段で測定される圧力が設定圧力と同じになるように調整する圧力調整手段と、
を有することを特徴とする定圧刺激装置。
【請求項2】
前記突出部の皮膚当接面は、直径が2〜20mmの円形形状をしていることを特徴とする請求項1に記載の定圧刺激装置。
【請求項3】
さらに、前記突出部が進退移動可能に取り付けられている筐体と、
当該筐体を保持するための保持手段と、を有することを特徴とする請求項1または2に記載の定圧刺激装置。
【請求項4】
前記保持手段は、複数のアームが関節部を介して連結した多関節アームを含んでいることを特徴とする請求項3に記載の定圧刺激装置。
【請求項5】
前記圧力測定手段は、ロードセルを含んでおり、
前記圧力調整手段は、測定された圧力と設定圧力にそれぞれ対応する電圧信号間の差分をとる差動アンプと、当該差動アンプの出力に基づいて直線駆動するリニアアクチュエータとを含んでいることを特徴とする請求項1〜4のいずれか一つに記載の定圧刺激装置。
【請求項1】
硬結部位である痛みのトリガーポイントを探索するための定圧刺激装置であって、
生体を局所的に刺激するために、生体の皮膚上に当接される突出部と、
前記突出部によって生体に加えられる圧力を測定する圧力測定手段と、
前記突出部を進退移動させて、前記圧力測定手段で測定される圧力が設定圧力と同じになるように調整する圧力調整手段と、
を有することを特徴とする定圧刺激装置。
【請求項2】
前記突出部の皮膚当接面は、直径が2〜20mmの円形形状をしていることを特徴とする請求項1に記載の定圧刺激装置。
【請求項3】
さらに、前記突出部が進退移動可能に取り付けられている筐体と、
当該筐体を保持するための保持手段と、を有することを特徴とする請求項1または2に記載の定圧刺激装置。
【請求項4】
前記保持手段は、複数のアームが関節部を介して連結した多関節アームを含んでいることを特徴とする請求項3に記載の定圧刺激装置。
【請求項5】
前記圧力測定手段は、ロードセルを含んでおり、
前記圧力調整手段は、測定された圧力と設定圧力にそれぞれ対応する電圧信号間の差分をとる差動アンプと、当該差動アンプの出力に基づいて直線駆動するリニアアクチュエータとを含んでいることを特徴とする請求項1〜4のいずれか一つに記載の定圧刺激装置。
【図1】


【図2】

【図3】

【図4】
【図5】
【図6】

【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2009−50725(P2009−50725A)
【公開日】平成21年3月12日(2009.3.12)
【国際特許分類】
【出願番号】特願2008−312258(P2008−312258)
【出願日】平成20年12月8日(2008.12.8)
【分割の表示】特願2003−390607(P2003−390607)の分割
【原出願日】平成15年11月20日(2003.11.20)
【出願人】(501157830)学校法人後藤学園 (1)
【出願人】(000109543)テルモ株式会社 (2,232)
【Fターム(参考)】
【公開日】平成21年3月12日(2009.3.12)
【国際特許分類】
【出願日】平成20年12月8日(2008.12.8)
【分割の表示】特願2003−390607(P2003−390607)の分割
【原出願日】平成15年11月20日(2003.11.20)
【出願人】(501157830)学校法人後藤学園 (1)
【出願人】(000109543)テルモ株式会社 (2,232)
【Fターム(参考)】
[ Back to top ]